KELOMPOK 2 1. ALIFANTO DHIASTAMA 2. DHEA ISRA ATMIKA K 3. M.MARCO SAYPUTRA 4. SALMA ISNAINI JURUSAN TEKNIK KIMIA POGRAM STUDI TEKNIK ENERGI POLITEKNIK NEGERI SRIWIJAYA TAHUN AKADEMIK 2015 DOSEN PEMBIMBING : YOHANDRI BOW

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

KELOMPOK 2
1. ALIFANTO DHIASTAMA
2. DHEA ISRA ATMIKA K 3. M.MARCO SAYPUTRA4. SALMA ISNAINI
JURUSAN TEKNIK KIMIA POGRAM STUDI TEKNIK ENERGI POLITEKNIK NEGERI SRIWIJAYA
TAHUN AKADEMIK 2015
DOSEN PEMBIMBING : YOHANDRI BOW

BAGIAN III.
ANALISIS KELAKUAN DINAMIK
PROSES-PROSES KIMIA

ANALISIS KELAKUAN DINAMIK PROSES-
PROSES KIMIA
SIMULASI MENGGUNAKAN KOMPUTER DAN LINIERISASI SISTEM NON-LINEAR
TRANSFORMASI LAPLACE
Pada Bagian III ini pertama-tama akan dibahas konsep linierisasi dan
cara-cara untuk mendekati sistem-sistem non-linier menggunakan sistem
linier, kemudian juga akan dibahas mengenai Transformasi Laplace, yang
merupakan cara sederhana untuk menyelesaikan persamaan-persamaan
diferensial linier.
SIMULASI MENGGUNAKAN KOMPUTER
DAN LINEARISASI SISTEM-SISTEM
NONLINIER
Hal-hal yang dapat dilakukan untuk mengatasi kesulitan dalam
anlisis kelakuan dinamik sistem non-linier adalah sebagai berikut:
a. Melakukan simulasi sistem non-linier pada komputer analog
atau digital, dan menghitung penyelesaiannya secara numerik.
b. Mentransformasikan sistem non-linier menjadi suatu sistem
yang linier dengan melalui transformasi variabel-variabel
sistem non-linier tersebut.
c. Mengembangkan suatu model linier yang kelakuan dinamiknya
mendekati sistem linier pada daerah kondisi operasi tertentu
yang telah ditetapkan.

6.1. Simulasi Dinamika Proses Menggunakan Komputer
Jenis komputer yang pertama kali digunakan untuk simulasi proses kimia
adalah komputer analog.
Komputer analog mempunyai beberapa kelemahan,yaitu:
1. Untuk melakukan set-up masalah dan menjalankan analisis numerik terhadap
masalah tersebut dibutuhkan waktu yang cukup lama.
2. Untuk setiap operasi matematik dibutuhkan satu elemen perangkat keras,
sehingga simulasi sistem-sistem yang rumit dan besar menjadi sulit.
3. Sistem-sistem yang non-linier hanya dapat disimulasikan dengan perangkat
keras yang mahal ( generator fungsi ) dengan fleksibilitas yang rendah.
4. Komputer analog tidak memiliki memory seperti pada komputer digital.

Beberapa kategori metoda numerik yang dapat digunakan untuk
menyelesaikan persamaan diferensial dan aljabar non-linier adalah sebagai
berikut:
1.Metoda numerik untuk penyelesaian persamaan-persamaan
aljabar
Beberapa metode interasi persamaan aljabar yang sering digunakan adalah
metode setengah interval (interval halfing), metode substitusi berurut (successive
substitution), and metode newtor-Raphson.
2.Pengintegrasian numerik persamaan-persamaan differensial
Beberapa metode pengintegrasian secara numerik digunakan adalah metode
eksplisit dan implisit.Kunci pemilihan suatu teknik integrasi yang tepat adalah
kestabilan prosedur dan kecepatannya, dalam mencapai penyelesaian. Metode
integrasi yang paling populer adalah metode integrasi runge-kutta Orde -4
6.2. Linierisasi Sistem Satu Variabel
Linierisasi adalah suatu cara mendekati suatu sistem non-linier dengan
sistem yang linier. Linearisasi digunakan secara luas untuk mempelajari dinamika
proses dan perancangan sistem pengendali untuk alasan-alasan berikut:
1. Dengan linerisasi akan didapatkan sistem linier yang dapat diselesaikan
secara analitis dan memberikan gambaran kelakuan proses secara lengkap
untuk berbagai nilai parameter proses dan variabel input. Simulasi komputer
untuk proses non-linier hanya akan memberikan gambaran mengenai
kelakuan sistem pada nilai parameter proses dan variabel input tertentu.
2. Perkembangan berarti untuk perancangan sistem pengendali yang efektif baru
dicapai sebatas untuk proses-proses linier.
Persamaan non-linier umum yang digunakan untuk memodelkan
proses adalah sebagai berikut:
Fungsi f(x)b pada persamaan tersebut dapat diekspansikan dalam
bentuk Deret Taylor di sekitar titik x˳ sebagai berikut:
Jika suku orde kedua dan selebihnya dari Deret Taylor tersebut
diabaikan, maka f(x) dapat didekati sebagai berikut:
Kesalahan yang akan diakibatkan oleh pendekatan diatas adalah
sebagai berikut:
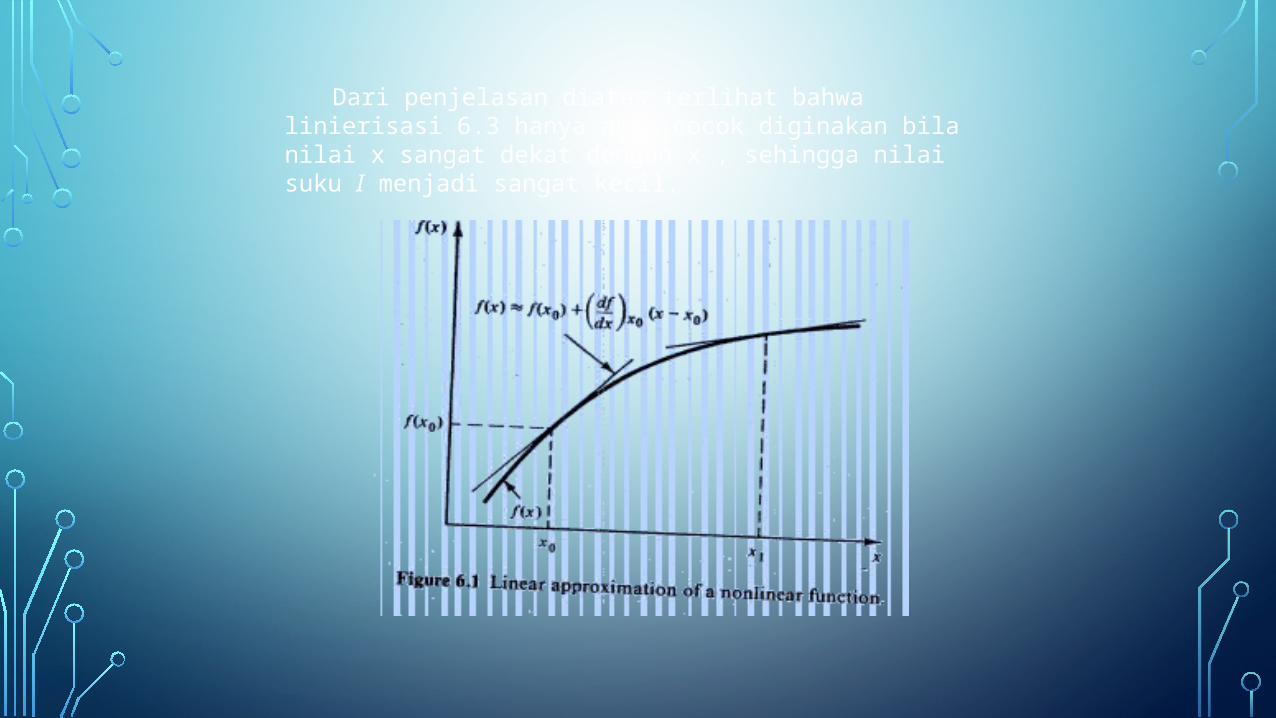
Dari penjelasan diatas terlihat bahwa linierisasi 6.3 hanya akan cocok diginakan bila nilai x sangat dekat dengan x , sehingga nilai suku I menjadi sangat kecil.

Pada gambar 6.1 diperlihatkan secara jelas perbandingan antara fungsi non-linier f(x) dan fungsi hasil linierisasi di sekitar titik x˳. Dari gambar tersebut juga terlihat bahwa hasil pendekatan linierisasi amat sangat bergantung pada letak titik x˳ yang disekitarnya dilakukan ekspansi taylor. Pada gambar terlihat jelas perbedaan hasil linearisasi pada dua titik yang letaknya berbeda (linierisasi f(x) pada titik x˳ dan . Pendekatan system non-linier dengan linierisasi hanya akan memiliki nilai yang tepat pada titik linierisasi.
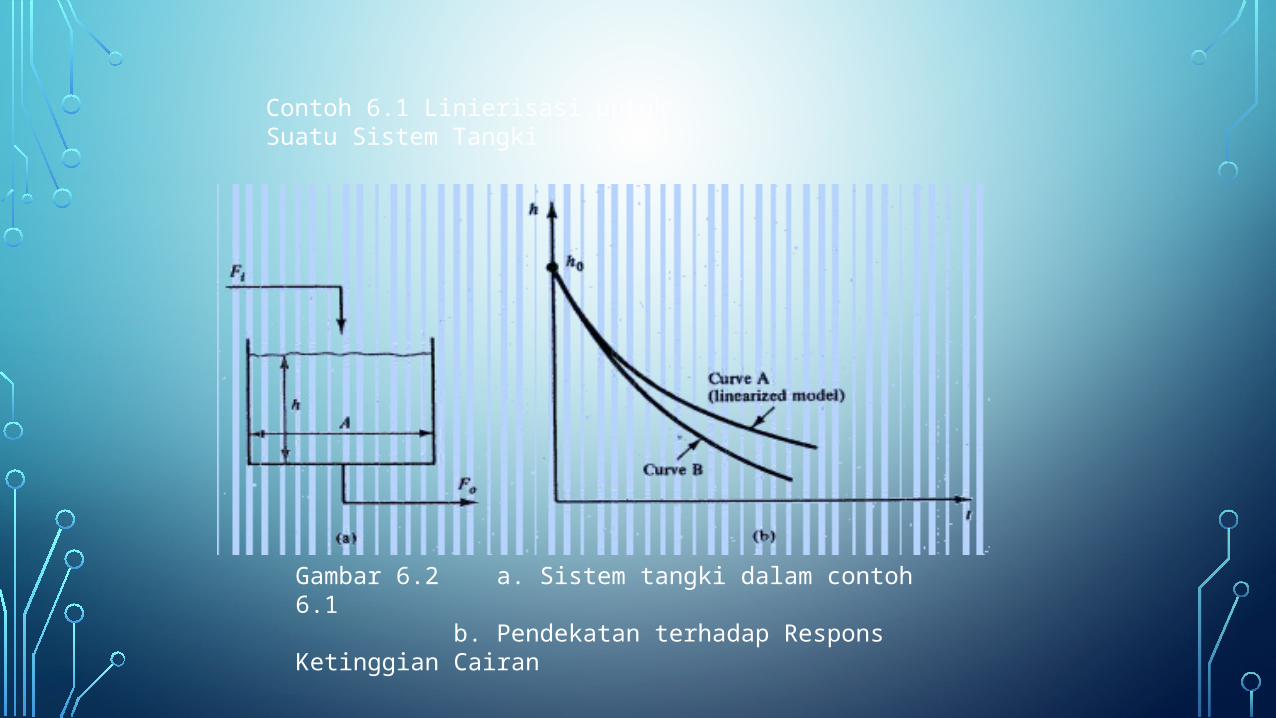
Contoh 6.1 Linierisasi untuk Suatu Sistem Tangki
Gambar 6.2 a. Sistem tangki dalam contoh 6.1 b. Pendekatan terhadap Respons
Ketinggian Cairan
Pada saat tangki dalam gambar 6.2.a., neraca massa total system akan menghasilkan persamaan berikut :
Jika laju alir keluar F˳ adalah fungsi linier dari ketinggian cairan, atau F˳ = h, dengan suatu konstanta, 𝛼 𝛼maka persamaan 6.6 akan menjadi :
Yang merupakan persamaan diferensial linier dan tidak membutuhkan linierisasi

Jika F˳ berubah terhadap ketinggian cairan menurut fungsi F˳ = , 𝛽maka neraca massa total yang dihasilkan akan memberikan model dinamik non-linier sebagai brikut :
Suku yang tidak linier pada persamaan tersebut hanya , Ekspansi Deret Taylor pada suku ini di sekitar titk h˳ akan menghasilkan linierisasi berikut :

Pengabaian terhadap suku-suku orde kedua dan seterusnya akan menghasilkan :
Yang jika diterapkan pada system dinamik non-linier awal akan memberikan model pendekatan linierisasi berikut :
6.3 Variable Penyimpangan
Jika x(s) adalah nilai x pada keadaan tunak yang menggambarkan keadaan dinamik awal system , maka :
Jika adalah titik linierisasi untuk persamaan 6.1 (x˳ = ) , maka persamaan 6.1. akan menghasilkan model linier berikut :

Pengurangan 6.9 dari 6.10. akan menghasilkan persamaan berikut :
Jika variable penyimpangan x didefinisikan sebagai x΄ = x- maka persamaan 6.11 dapat ditulis kembali sebagai berikut :

Contoh 6.2 penggunaan variable penyimpangan untuk system tangki pada contoh 6.1
Pada model hasil linierisasi system tangki dalam contoh 6.1. jika nilai tunak ketinggian cairan untuk laju alir masuk tertentu akan menghasilkan persamaan model berikut :
Pada keadaan tunak , juga didapatkan persamaan keadaan system sebagai berikut
Pengurangan persamaan 6.14 dari 6.13 akan menghasilkan :
Dengan mendifinisikan variable penyimpangan h’ = h - dan akan didapatkan model hasil linierisasi dalam variable penyimpangan berikut
Related Documents











