Pengendalian Proses 1 PENGENDALIAN PROSES Disusun oleh Ir. HERIYANTO, M.T. 2010

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Pengendalian Proses 1
PENGENDALIAN PROSES
Disusun oleh Ir. HERIYANTO, M.T.
2010
Pengendalian Proses 2
KATA PENGANTAR
Buku ini disusun dengan dua tujuan yaitu, sebagai buku pegangan kuliah mahasiswa dan sebagai referensi bagi teknisi dan operator pabrik. Buku berisi konsep, prinsip, prosedur dan perhitungan yang dipakai oleh ahli teknik atau teknisi untuk menganalisa, memilih, merancang sistem pengendalian. Setelah memahami isi buku ini diharapkan dapat memiliki pengetahuan dan pemahaman pengendalian proses sehingga mampu menerapkan pada kondisi nyata.
Pengendalian proses umumnya sarat dengan matematika. Tetapi dalam buku ini matematika tidak menjadi landasan utama, meskipun tidak dapat dihindari. Oleh sebab itu pendekatan yang dilakukan bukan dengan analisis transformasi Laplace seperti yang biasa dilakukan di hampir seluruh perguruan tinggi. Ini atas dasar pertimbangan, bahwa dalam kondisi nyata, pada saat operator berhadapan langsung dengan sistem pengendalian di pabrik, mereka tidak memerlukan analisis transformasi Laplace. Transformasi Laplace hanya dipakai untuk pemodelan dan analisis sistem linier.
Sasaran pemakai buku ini adalah untuk mahasiswa Diploma III atau Politeknik Jurusan Teknik Kimia dan Kimia Inudstri serta umumnya untuk mahasiswa dari bidang yang berkaitan atau sedang mempelajari teknologi proses misalnya Teknik Mesin, Teknik Energi, dan Teknik Refrigerasi. Penulis mengucapkan terima kasih kepada Politeknik Negeri Bandung atas Penyusunan Bahan Ajar dalam Kurikulum Berbasis Kompetensi (Kurikulum 2007) yang dibiayai dari DIPA tahun anggaran 2010, sehingga penulisan Buku Ajar ini dapat dilaksanakan. Tidak lupa penulis juga mengucapkan terima kasih kepada semua fihak, baik yang langsung maupun tidak langsung telah membantu penulisan buku ini. Penulis menyadari sepenuhnya bahwa buku ini masih kurang sempurna. Oleh sebab itu segala saran dan kritik yang bersifat membangun sangat dinantikan. Semoga buku ini bermanfaat. Bandung, Juni 2010 Ir. Heriyanto, M.T.
Pengendalian Proses 3
DAFTAR ISTILAH
Gangguan yaitu besaran yang menyebabkan penyimpangan keadaan proses. Mengendalikan (kata kerja) adalah “memperoleh” keadaan yang diinginkan dengan cara mengatur variabel tertentu dalam sistem. Offset adalah selisih antara nilai setpoint dan variabel proses setelah tercapat kondisi tunak (steady state). Pengendalian proses adalah “cara memperoleh” keadaan proses agar sesuai dengan yang diinginkan. Pengendalian umpan balik adalah pengendalian yang memakai variabel keluaran sistem untuk mempengaruhi masukan dari sistem yang sama. Pengendalian umpan maju (feedforward control) adalah pengendalian yang memakai variabel masukan untuk mempengaruhi variabel masukan lain dalam sistem. Proportional gain atau sensitivitas proporsional adalah perbandingan antara perubahan sinyal kendali (u) dan perubahan error (e). Proportional band (PB), yaitu persentase perubahan error atau pengukuran yang menghasilkan perubahan sinyal kendali atau manipulated variable sebesar 100%. Proses dalam kata pengendalian proses dan industri proses menunjuk pada “cara perubahan” materi atau energi untuk memperoleh produk akhir. Setpoint adalah nilai variabel proses yang diinginkan. Sistem proses adalah rangkaian operasi yang menangani perubahan material dan/atau energi secara fisiko-kimia sehingga diperoleh produk atau keadaan yang diingink. Variabel keadaan adalah besaran yang menyatakan keadaan dinamik sistem Variabel proses (process variable, PV) adalah besaran yang menyatakan keadaan proses. Variabel pengendali atau variabel termanipulasi (manipulated variable, MV) yaitu besaran yang dipakai untuk mengendalikan atau mempertahankan keadaan proses.
Pengendalian Proses 4
BAB-1 PENDAHULUAN
TUJUAN PEMBELAJARAN UMUM Mengenal dasar-dasar pengendalian proses secara kualitatif. TUJUAN PEMBELAJARAN KHUSUS Setelah menyelesaikan bab ini, mahasiswa diharapkan dapat:
1.1 menjelaskan alasan mengapa proses perlu dikendalikan. 1.2 menjelaskan prinsip pengendalian proses 1.3 membedakan jenis pengendalian lingkar terbuka dan tertutup 1.4 menyebutkan hakikat utama tujuan pengendalian proses 1.5 menjelaskan kriteria pengendalian yang baik.
Pengendalian Proses 5
1.1 SISTEM PROSES DAN PENGENDALIAN Sistem pengendalian banyak ditemui dalam kehidupan sehari-hari. Beberapa contoh misalnya mempertahankan suhu tubuh 37oC oleh pusat kendali hipotalamus; mempertahankan arah kendaraan bermotor dalam jalur yang benar; mempertahankan suhu ruangan dalam kisaran 18 hingga 22 oC; dan masih banyak lagi. Dalam industri proses, sistem pengendalian bertujuan untuk mencapai kondisi proses agar diperoleh produk akhir yang sesuai. Namun, apakah memang betul-betul diperlukan pengendalian proses? Proses tidak perlu dikendalikan jika memang tujuan proses tercapai tanpa aksi pengendalian. Contoh sederhana mempertahankan suhu air pada titik didih. Meskipun tanpa pengendalian suhu air akan tetap. Sebaliknya, proses perlu dikendalikan jika untuk mencapai tujuan perlu pengawasan terus-menerus. Misalnya mempertahankan suhu air pada 40 oC dalam kondisi lingkungan normal. Dalam industri proses modern terdapat peralatan proses yang bekerja pada suhu dan tekanan ekstrem. Rangkaian peralatan sudah sedemikian kompleks. Sementara kondisi proses bersifat dinamik. Dari waktu ke waktu dapat berubah-ubah. Perubahan sedikit pada kondisi proses bisa berakibat fatal. Inilah yang menjadi alasan mengapa diperlukan suatu sistem pengendalian. Sistem pengendalian atau sistem kontrol adalah susunan beberapa komponen yang terangkai membentuk aksi pengendalian. Sistem pengendalian yang diterapkan dalam teknologi proses disebut sistem pengendalian proses. Dalam bidang ini, pengendalian proses diterapkan pada reaktor, penukar panas (heat exchanger), kolom pemisahan (misalnya distilasi, absorpsi, ekstraksi), tangki penampung cairan, aliran fluida, dan masih banyak lagi. 1.2 PERANAN PENGENDALIAN PROSES Peranan pengendalian proses dalam pabrik kimia mecakup tiga kelompok yaitu keamanan (safety), kehandalan operasi (operability), dan keuntungan eknomi (profitability). 1.2.1 Keamanan (safety) Dalam kelompok ini, keamanan meliputi: keselamatan manusia, perlindungan peralatan, dan perlindungan lingkungan.
Pengendalian proses adalah “cara memperoleh” keadaan proses agar sesuai dengan yang diinginkan
Mengendalikan (kata kerja) adalah “memperoleh” keadaan yang diinginkan dengan cara mengatur variabel tertentu dalam sistem.
Proses dalam kata pengendalian proses dan industri proses menunjuk pada “cara perubahan” materi atau energi untuk memperoleh produk akhir.
Pengendalian Proses 6
(a) Keselamatan Manusia
Sistem pengendalian bertugas menjaga keselamatan kerja. Beberapa sistem proses di pabrik memiliki kondisi operasi yang berbahaya bagi keselamatan manusia. Kondisi operasi pada suhu dan tekanan tinggi dengan bahan kimia berbahaya sangat berpotensi menimbulkan kecelakaan. Perlengkapan sistem alarm dan safety valve dapat memperkecil kemungkinan kecelakaan akibat kondisi ekstrem terlampaui.
(b) Perlindungan Peralatan
Sistem pengendalian bertugas mempertahankan batas aman operasi. Peralatan industri biasanya mahal dan sulit diperoleh. Jika terjadi kondisi darurat, sistem dapat melakukan penghentian (automatic shutdown) dan penguncian darurat (automatic emergency interlock) sehingga kegagalan satu peralatan tidak menjalar ke peralatan lain. Sistem ini selain melindungi peralatan juga melindungi manusia dari kecelakaan.
(c) Perlindungan Lingkungan
Sistem pengendalian bertugas mempertahankan batas aman pencemaran. Proses industri dapat menghasilkan bahan berbahaya bagi lingkungan. Kebocoran gas, cairan, atau padatan beracun dan yang merusak lingkungan perlu dihindari. Gas-gas yang berbahaya dan mudah terbakar disalurkan ke menara pembakar (flare). Jika menara pembakar tidak mampu menangani, gas terpaksa dibuang ke atmosfer melalui pressure safety valve untuk menghindari kondisi ekstrem yang membahayakan peralatan dan manusia.
1.2.2 Kehandalan Operasi (operability) Kehandalan operasi meliputi ketahanan terhadap gangguan produktivitas dan kualitas produk. Sistem pengendalian proses harus mampu menekan pengaruh gangguan sehingga dapat mempertahankan kondisi operasi yang mantap (steady operation) dalam batas operasional (operational constraint). Dengan perkataan lain, pengendalian proses mampu memperkecil keragaman kualitas dan produktivitas. Kualitas dan produktivitas sesuai spesifikasi dengan tingkat keragaman (variability) sekecil mungkin.
1.2.3 Keuntungan Ekonomi (profitability) Keuntungan ekonomi menjadi tujuan akhir dari proses produksi. Proses yang tidak aman dengan kondisi operasi tidak optimal, akan memperkecil keuntungan. Oleh sebab itu sistem pengendalian bertujuan menghasilkan kondisi operasi optimum. Ini mengandung arti kuantitas dan kualitas produk utama (yield) maksimum dengan biaya produksi minimum. Kuantitas dan kualitas (atau spesifikasi) produk ditetapkan oleh permintaan pasar. Jika terjadi penyimpangan dari spesifikasi akan menurunkan nilai jual produk. Misalnya, spesifikasi produk dengan batas maksimum pengotor, maksimum viskositas, minimum ketebalan, minimum konsentrasi, dsb. Pengendalian proses bekerja untuk menghasilkan kualitas produk sedekat mungkin dengan batas spesifikasi agar keuntungan maksimum. Pada proses tanpa pengendalian
Pengendalian Proses 7
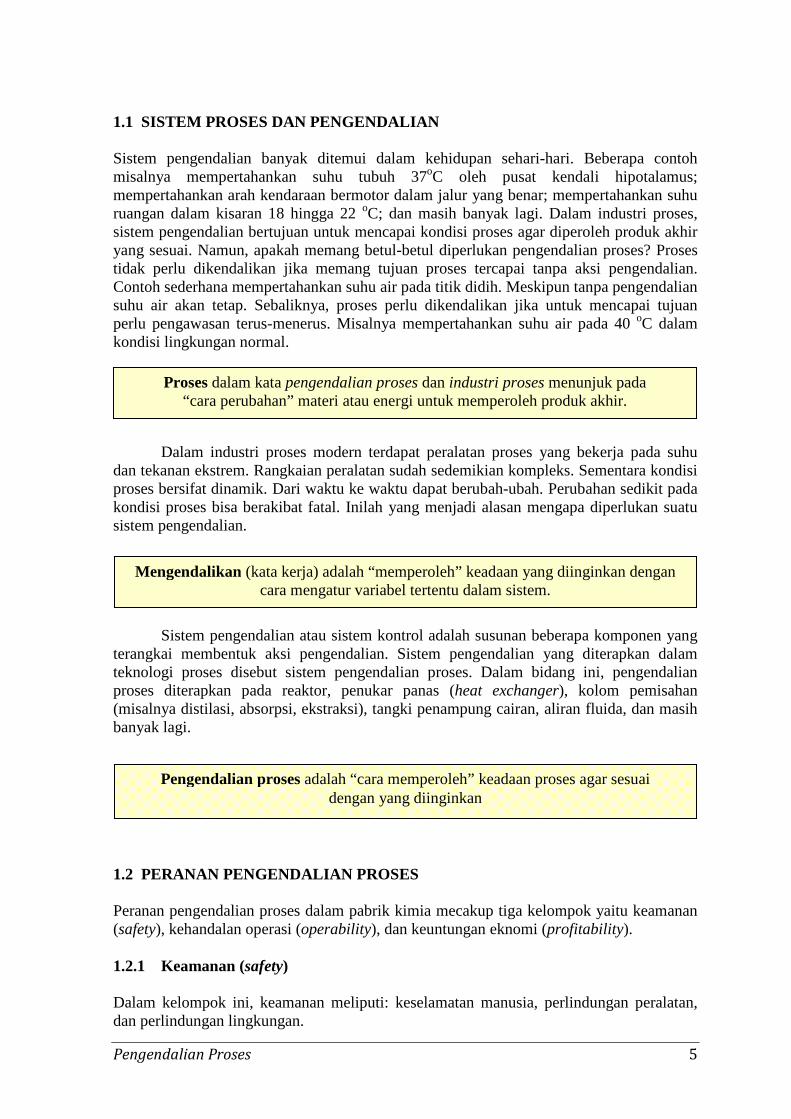
keragaman produk lebih besar. Sehingga rata-rata kualitas produk lebih jauh dari spesifikasi agar tidak ada produk yang keluar batas. Sebaliknya dengan pengendalian proses yang baik, produk lebih seragam, sehingga rata-rata kualitas produk bisa lebih dekat dengan batas spesifikasi.
Semua tujuan pengendalian proses seperti yang telah diuraikan adalah untuk pabrik secara keseluruhan. Sementara itu, pengendalian pabrik kimia dapat dirinci ke dalam pengendalian unit-unit proses atau operasi secara individual. Oleh sebab itu pembahasan dalam buku ini difokuskan pada metode pengendalian untuk variabel proses individual.
Keu
ntu
nga
n
Waktu
Batas spefisikasi
Rata-rata produk
Keu
ntu
nga
n
Waktu
Batas spefisikasi
Rata-rata produk
(a) Tanpa Pengendalian (b) Dengan Pengendalian
Gambar 1.1 Peranan pengendalian dalam industri proses.
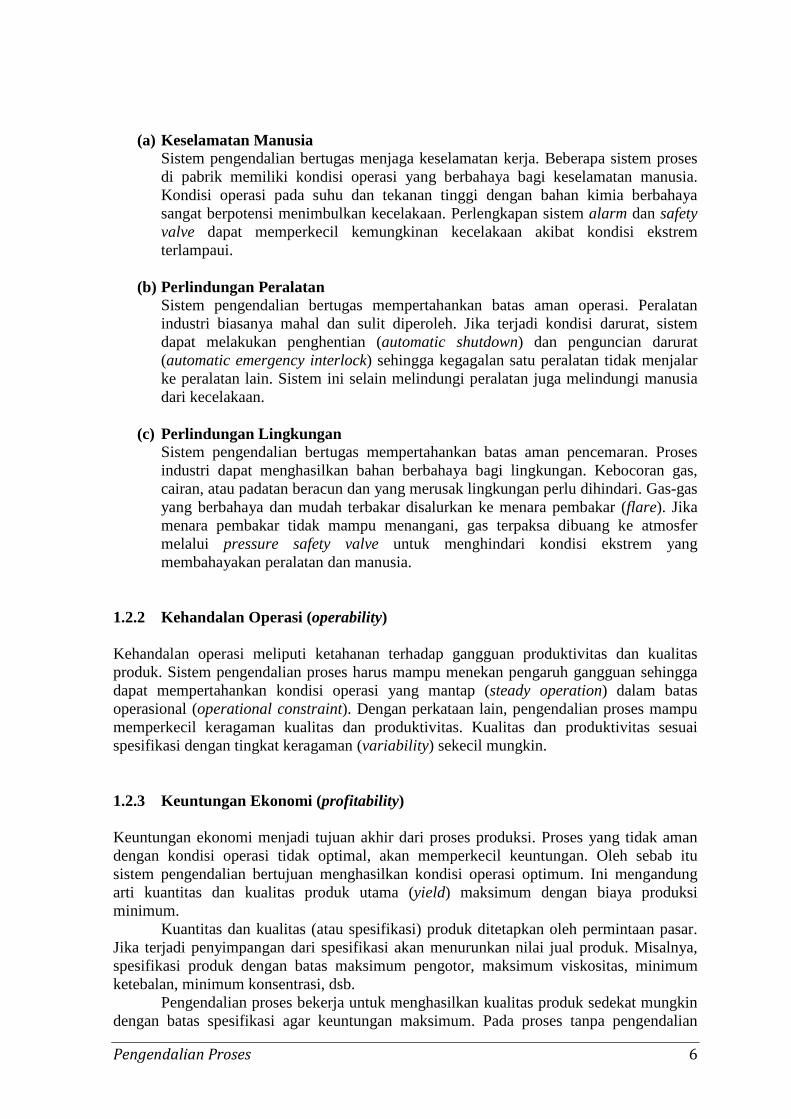
1.3 PRINSIP PENGENDALIAN PROSES Langkah pertama dalam memahami pengendalian proses dapat dimulai dengan mempelajari contoh proses pemanasan dalam alat penukar panas seperti dilukiskan pada gambar 1.2. Tujuan proses adalah memanaskan aliran minyak hingga suhu tertentu. Minyak dingin masuk penukar panas dan dipanaskan oleh aliran air panas. Suhu minyak keluar menunjukkan hasil kerja proses pemanasan. Oleh sebab itu suhu minyak keluar disebut sebagai nilai proses (process value), variabel proses (process variable), atau variabel keluaran (output variable) sistem proses. Pada proses pemanasan, minyak dingin menjadi panas karena terjadi perpindahan panas dari aliran air panas ke minyak dingin. Proses ini dipengaruhi oleh: (1) laju aliran minyak masuk, (2) suhu minyak masuk, (3) laju alir air panas, (4) suhu air panas, dan (5) kehilangan panas ke lingkungan. Dengan kata lain, suhu minyak keluar dipengaruhi oleh ke lima besaran tersebut. Ke lima besaran itu sebagai variabel masukan sistem proses yaitu besaran yang mempengaruhi variabel keluaran (suhu minyak keluar).
(1) Keamanan (safety). Menjaga dan mempertahankan batas aman keselamatan kerja, operasi, dan pencemaran;
(2) Kehandalan operasi (operability). Mempertahankan kondisi tetap mantap dalam batas operasional (operational constraint) sehingga produktivitas dan kualitas produk terjaga
(3) Keuntungan (profitability): proses berjalan optimum dengan keuntungan maksimum.
Pengendalian Proses 8
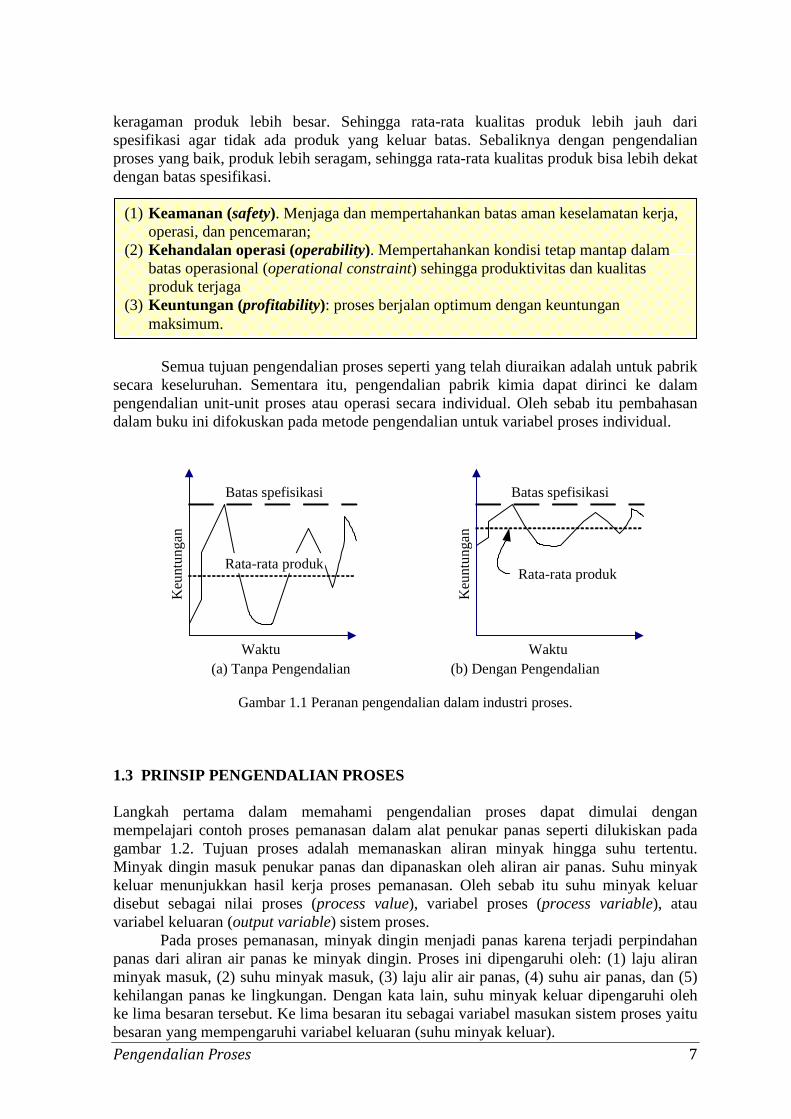
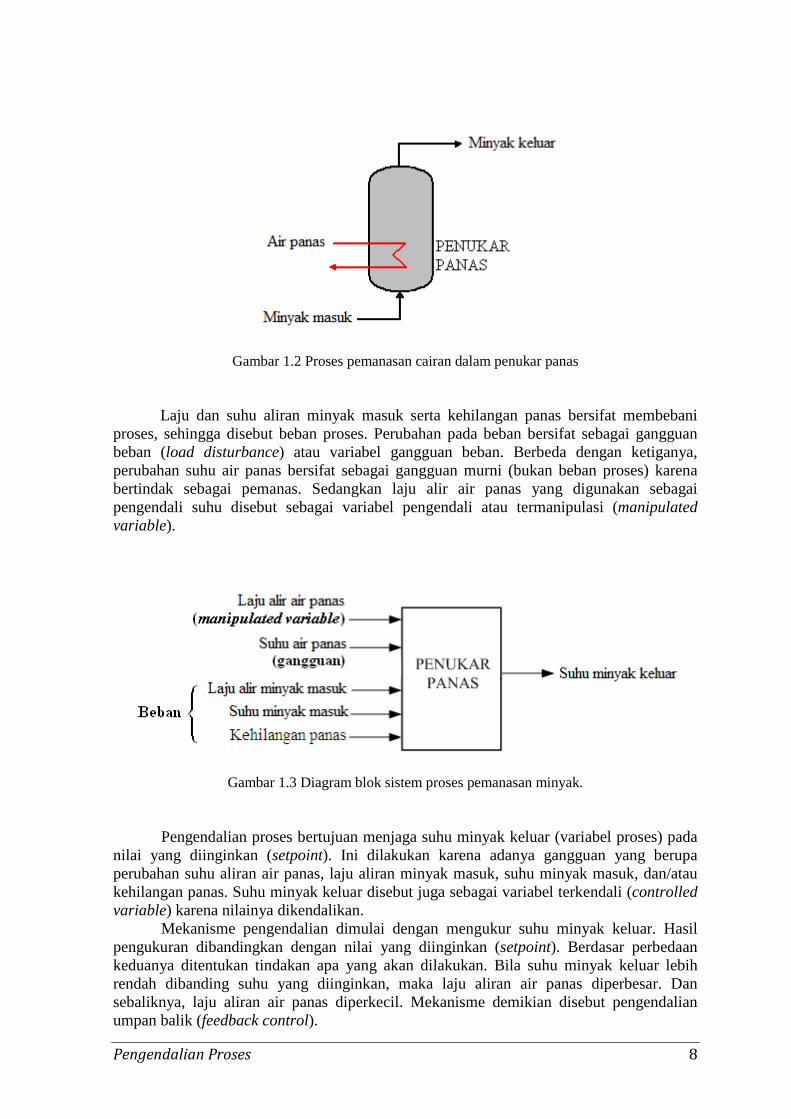
Gambar 1.2 Proses pemanasan cairan dalam penukar panas Laju dan suhu aliran minyak masuk serta kehilangan panas bersifat membebani proses, sehingga disebut beban proses. Perubahan pada beban bersifat sebagai gangguan beban (load disturbance) atau variabel gangguan beban. Berbeda dengan ketiganya, perubahan suhu air panas bersifat sebagai gangguan murni (bukan beban proses) karena bertindak sebagai pemanas. Sedangkan laju alir air panas yang digunakan sebagai pengendali suhu disebut sebagai variabel pengendali atau termanipulasi (manipulated variable).
Gambar 1.3 Diagram blok sistem proses pemanasan minyak.
Pengendalian proses bertujuan menjaga suhu minyak keluar (variabel proses) pada
nilai yang diinginkan (setpoint). Ini dilakukan karena adanya gangguan yang berupa perubahan suhu aliran air panas, laju aliran minyak masuk, suhu minyak masuk, dan/atau kehilangan panas. Suhu minyak keluar disebut juga sebagai variabel terkendali (controlled variable) karena nilainya dikendalikan.
Mekanisme pengendalian dimulai dengan mengukur suhu minyak keluar. Hasil pengukuran dibandingkan dengan nilai yang diinginkan (setpoint). Berdasar perbedaan keduanya ditentukan tindakan apa yang akan dilakukan. Bila suhu minyak keluar lebih rendah dibanding suhu yang diinginkan, maka laju aliran air panas diperbesar. Dan sebaliknya, laju aliran air panas diperkecil. Mekanisme demikian disebut pengendalian umpan balik (feedback control).
Pengendalian Proses 9
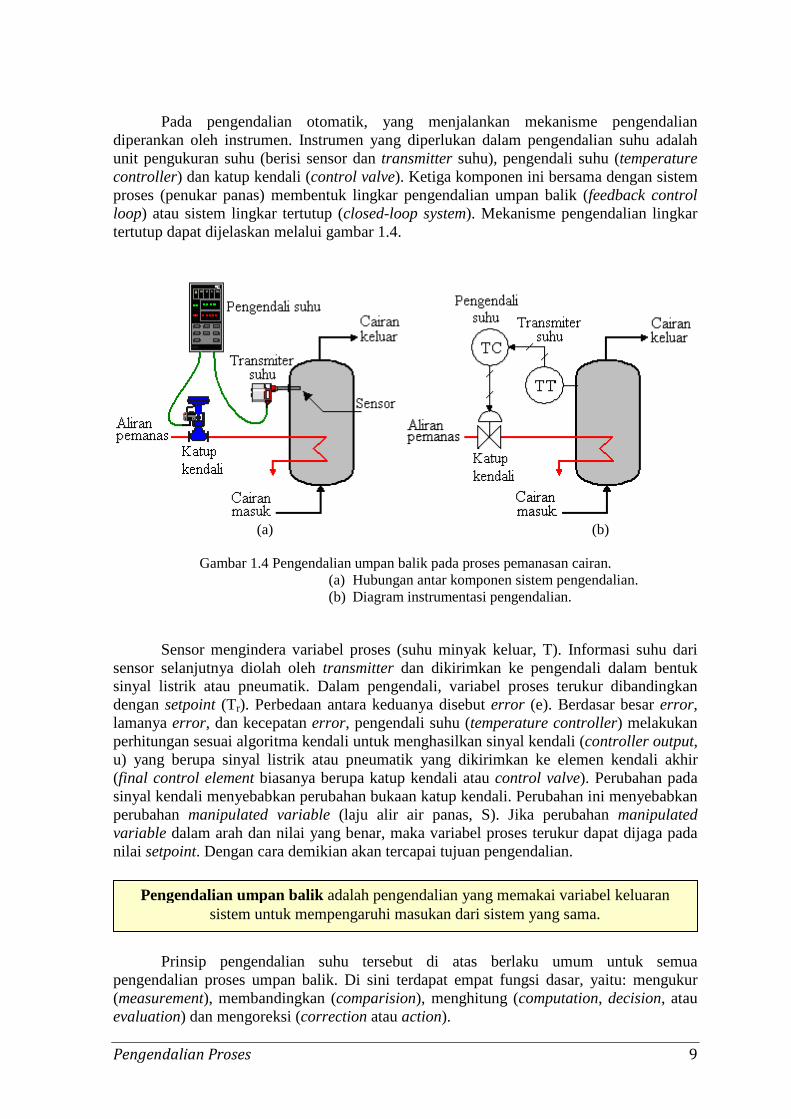
Pada pengendalian otomatik, yang menjalankan mekanisme pengendalian diperankan oleh instrumen. Instrumen yang diperlukan dalam pengendalian suhu adalah unit pengukuran suhu (berisi sensor dan transmitter suhu), pengendali suhu (temperature controller) dan katup kendali (control valve). Ketiga komponen ini bersama dengan sistem proses (penukar panas) membentuk lingkar pengendalian umpan balik (feedback control loop) atau sistem lingkar tertutup (closed-loop system). Mekanisme pengendalian lingkar tertutup dapat dijelaskan melalui gambar 1.4.
(a) (b)
Gambar 1.4 Pengendalian umpan balik pada proses pemanasan cairan. (a) Hubungan antar komponen sistem pengendalian. (b) Diagram instrumentasi pengendalian.
Sensor mengindera variabel proses (suhu minyak keluar, T). Informasi suhu dari
sensor selanjutnya diolah oleh transmitter dan dikirimkan ke pengendali dalam bentuk sinyal listrik atau pneumatik. Dalam pengendali, variabel proses terukur dibandingkan dengan setpoint (Tr). Perbedaan antara keduanya disebut error (e). Berdasar besar error, lamanya error, dan kecepatan error, pengendali suhu (temperature controller) melakukan perhitungan sesuai algoritma kendali untuk menghasilkan sinyal kendali (controller output, u) yang berupa sinyal listrik atau pneumatik yang dikirimkan ke elemen kendali akhir (final control element biasanya berupa katup kendali atau control valve). Perubahan pada sinyal kendali menyebabkan perubahan bukaan katup kendali. Perubahan ini menyebabkan perubahan manipulated variable (laju alir air panas, S). Jika perubahan manipulated variable dalam arah dan nilai yang benar, maka variabel proses terukur dapat dijaga pada nilai setpoint. Dengan cara demikian akan tercapai tujuan pengendalian.
Prinsip pengendalian suhu tersebut di atas berlaku umum untuk semua
pengendalian proses umpan balik. Di sini terdapat empat fungsi dasar, yaitu: mengukur (measurement), membandingkan (comparision), menghitung (computation, decision, atau evaluation) dan mengoreksi (correction atau action).
Pengendalian umpan balik adalah pengendalian yang memakai variabel keluaran sistem untuk mempengaruhi masukan dari sistem yang sama.
Pengendalian Proses 10
Tabel 1.1 Contoh empat fungsi dasar pengendalian.
Mengukur Membandingkan Menghitung Mengoreksi Suhu cairan keluar (T)
Suhu T dengan nilai setpoint (Tr)
Jika T > Tr perkecil pemanas Perkecil bukaan katup Jika T < Tr perbesar pemanas Perbesar bukaan katup
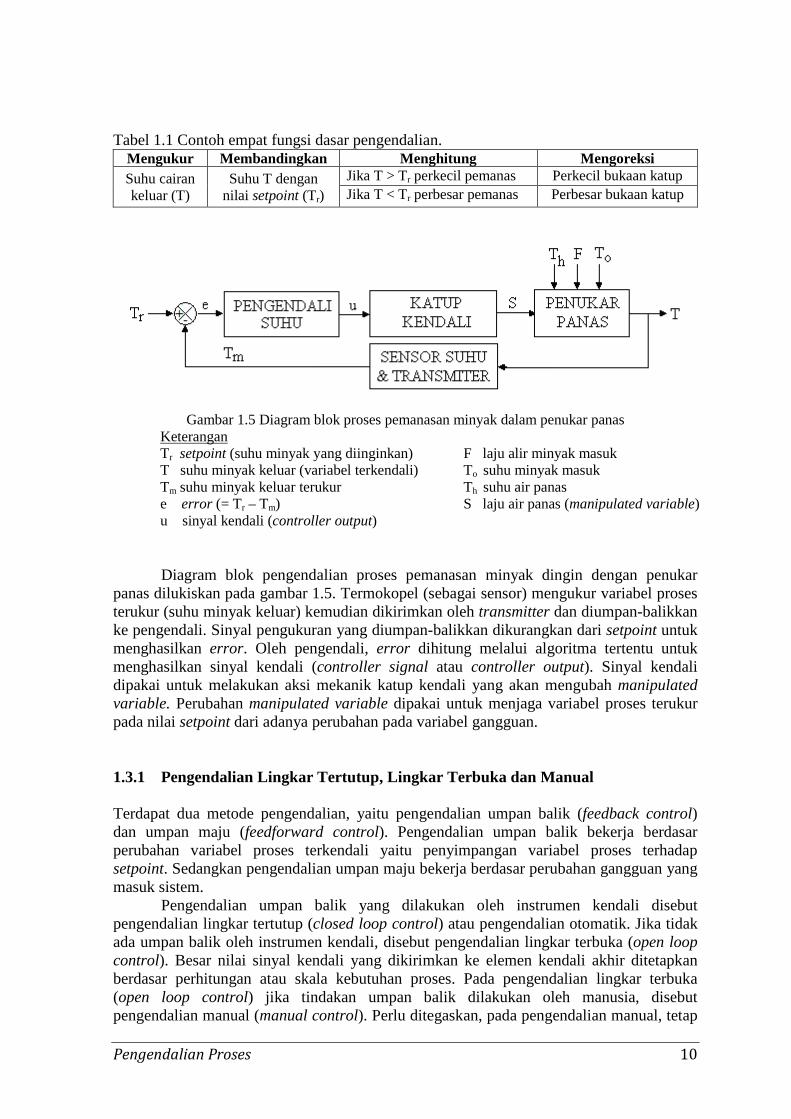
Gambar 1.5 Diagram blok proses pemanasan minyak dalam penukar panas Keterangan Tr setpoint (suhu minyak yang diinginkan) T suhu minyak keluar (variabel terkendali) Tm suhu minyak keluar terukur e error (= Tr – Tm) u sinyal kendali (controller output)
F laju alir minyak masuk To suhu minyak masuk Th suhu air panas S laju air panas (manipulated variable)
Diagram blok pengendalian proses pemanasan minyak dingin dengan penukar panas dilukiskan pada gambar 1.5. Termokopel (sebagai sensor) mengukur variabel proses terukur (suhu minyak keluar) kemudian dikirimkan oleh transmitter dan diumpan-balikkan ke pengendali. Sinyal pengukuran yang diumpan-balikkan dikurangkan dari setpoint untuk menghasilkan error. Oleh pengendali, error dihitung melalui algoritma tertentu untuk menghasilkan sinyal kendali (controller signal atau controller output). Sinyal kendali dipakai untuk melakukan aksi mekanik katup kendali yang akan mengubah manipulated variable. Perubahan manipulated variable dipakai untuk menjaga variabel proses terukur pada nilai setpoint dari adanya perubahan pada variabel gangguan.
1.3.1 Pengendalian Lingkar Tertutup, Lingkar Terbuka dan Manual Terdapat dua metode pengendalian, yaitu pengendalian umpan balik (feedback control) dan umpan maju (feedforward control). Pengendalian umpan balik bekerja berdasar perubahan variabel proses terkendali yaitu penyimpangan variabel proses terhadap setpoint. Sedangkan pengendalian umpan maju bekerja berdasar perubahan gangguan yang masuk sistem.
Pengendalian umpan balik yang dilakukan oleh instrumen kendali disebut pengendalian lingkar tertutup (closed loop control) atau pengendalian otomatik. Jika tidak ada umpan balik oleh instrumen kendali, disebut pengendalian lingkar terbuka (open loop control). Besar nilai sinyal kendali yang dikirimkan ke elemen kendali akhir ditetapkan berdasar perhitungan atau skala kebutuhan proses. Pada pengendalian lingkar terbuka (open loop control) jika tindakan umpan balik dilakukan oleh manusia, disebut pengendalian manual (manual control). Perlu ditegaskan, pada pengendalian manual, tetap
Pengendalian Proses 11
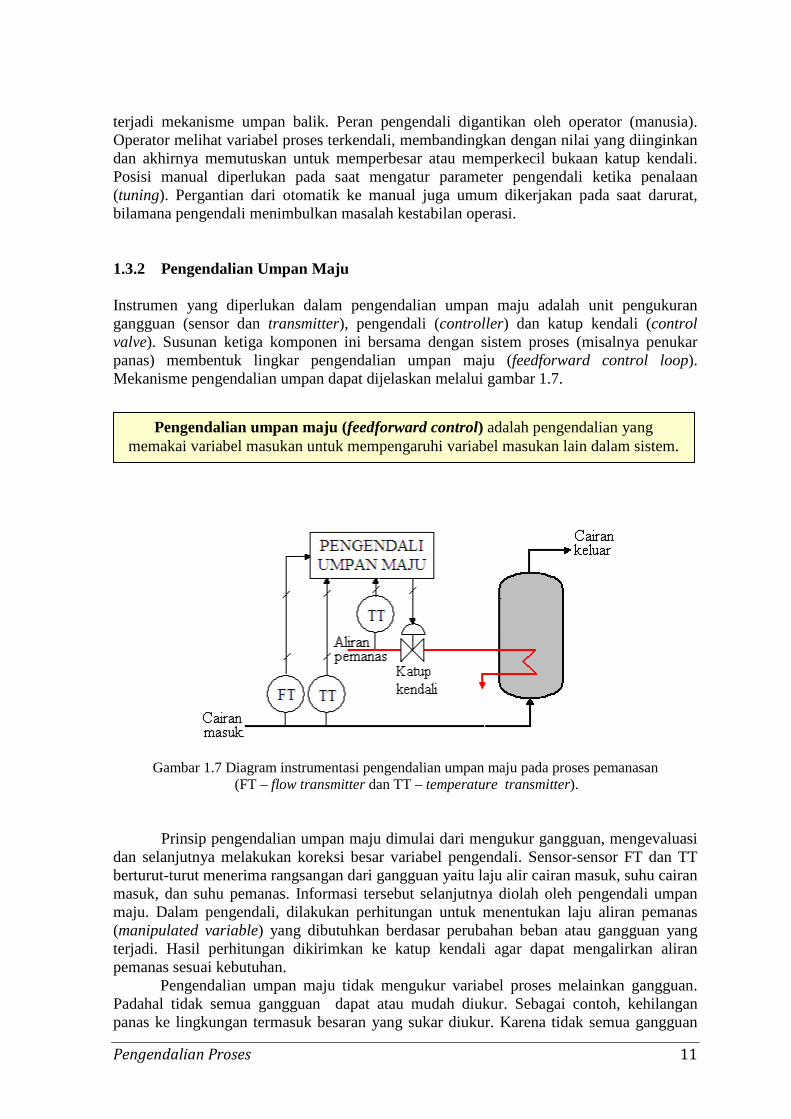
terjadi mekanisme umpan balik. Peran pengendali digantikan oleh operator (manusia). Operator melihat variabel proses terkendali, membandingkan dengan nilai yang diinginkan dan akhirnya memutuskan untuk memperbesar atau memperkecil bukaan katup kendali. Posisi manual diperlukan pada saat mengatur parameter pengendali ketika penalaan (tuning). Pergantian dari otomatik ke manual juga umum dikerjakan pada saat darurat, bilamana pengendali menimbulkan masalah kestabilan operasi. 1.3.2 Pengendalian Umpan Maju Instrumen yang diperlukan dalam pengendalian umpan maju adalah unit pengukuran gangguan (sensor dan transmitter), pengendali (controller) dan katup kendali (control valve). Susunan ketiga komponen ini bersama dengan sistem proses (misalnya penukar panas) membentuk lingkar pengendalian umpan maju (feedforward control loop). Mekanisme pengendalian umpan dapat dijelaskan melalui gambar 1.7.
Gambar 1.7 Diagram instrumentasi pengendalian umpan maju pada proses pemanasan (FT – flow transmitter dan TT – temperature transmitter).
Prinsip pengendalian umpan maju dimulai dari mengukur gangguan, mengevaluasi dan selanjutnya melakukan koreksi besar variabel pengendali. Sensor-sensor FT dan TT berturut-turut menerima rangsangan dari gangguan yaitu laju alir cairan masuk, suhu cairan masuk, dan suhu pemanas. Informasi tersebut selanjutnya diolah oleh pengendali umpan maju. Dalam pengendali, dilakukan perhitungan untuk menentukan laju aliran pemanas (manipulated variable) yang dibutuhkan berdasar perubahan beban atau gangguan yang terjadi. Hasil perhitungan dikirimkan ke katup kendali agar dapat mengalirkan aliran pemanas sesuai kebutuhan. Pengendalian umpan maju tidak mengukur variabel proses melainkan gangguan. Padahal tidak semua gangguan dapat atau mudah diukur. Sebagai contoh, kehilangan panas ke lingkungan termasuk besaran yang sukar diukur. Karena tidak semua gangguan
Pengendalian umpan maju (feedforward control) adalah pengendalian yang memakai variabel masukan untuk mempengaruhi variabel masukan lain dalam sistem.
Pengendalian Proses 12
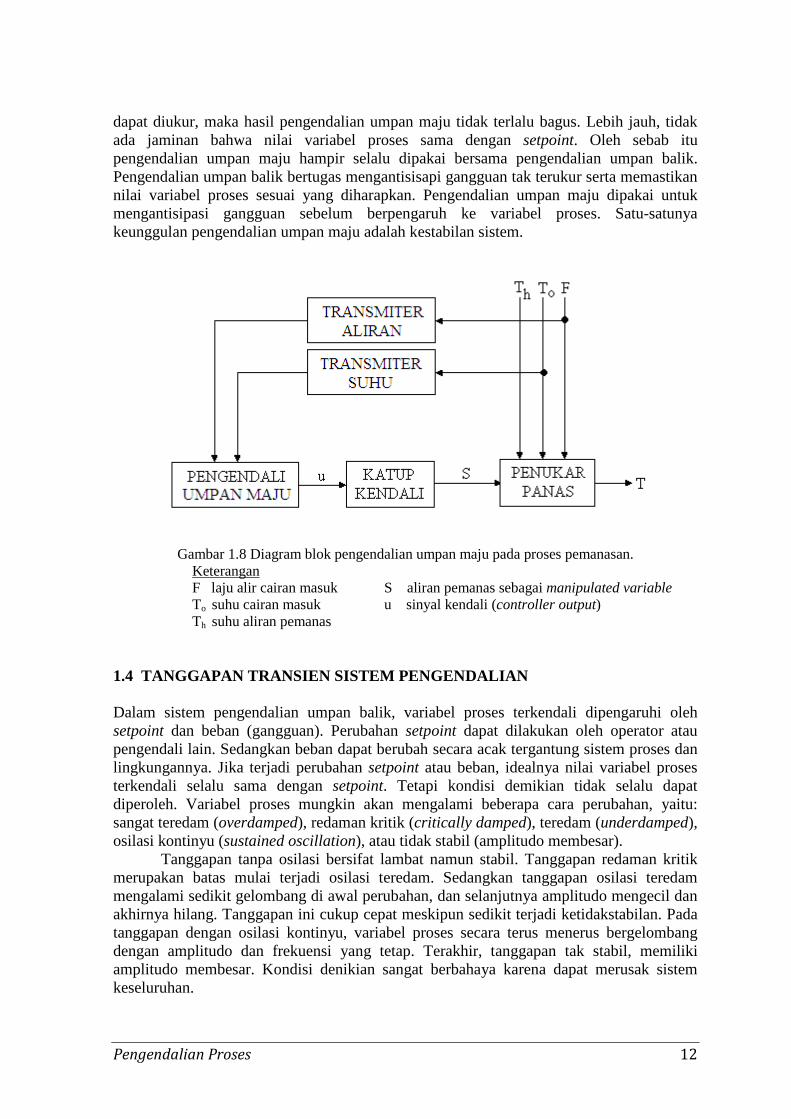
dapat diukur, maka hasil pengendalian umpan maju tidak terlalu bagus. Lebih jauh, tidak ada jaminan bahwa nilai variabel proses sama dengan setpoint. Oleh sebab itu pengendalian umpan maju hampir selalu dipakai bersama pengendalian umpan balik. Pengendalian umpan balik bertugas mengantisisapi gangguan tak terukur serta memastikan nilai variabel proses sesuai yang diharapkan. Pengendalian umpan maju dipakai untuk mengantisipasi gangguan sebelum berpengaruh ke variabel proses. Satu-satunya keunggulan pengendalian umpan maju adalah kestabilan sistem.
Gambar 1.8 Diagram blok pengendalian umpan maju pada proses pemanasan. Keterangan F laju alir cairan masuk To suhu cairan masuk Th suhu aliran pemanas
S aliran pemanas sebagai manipulated variable u sinyal kendali (controller output)
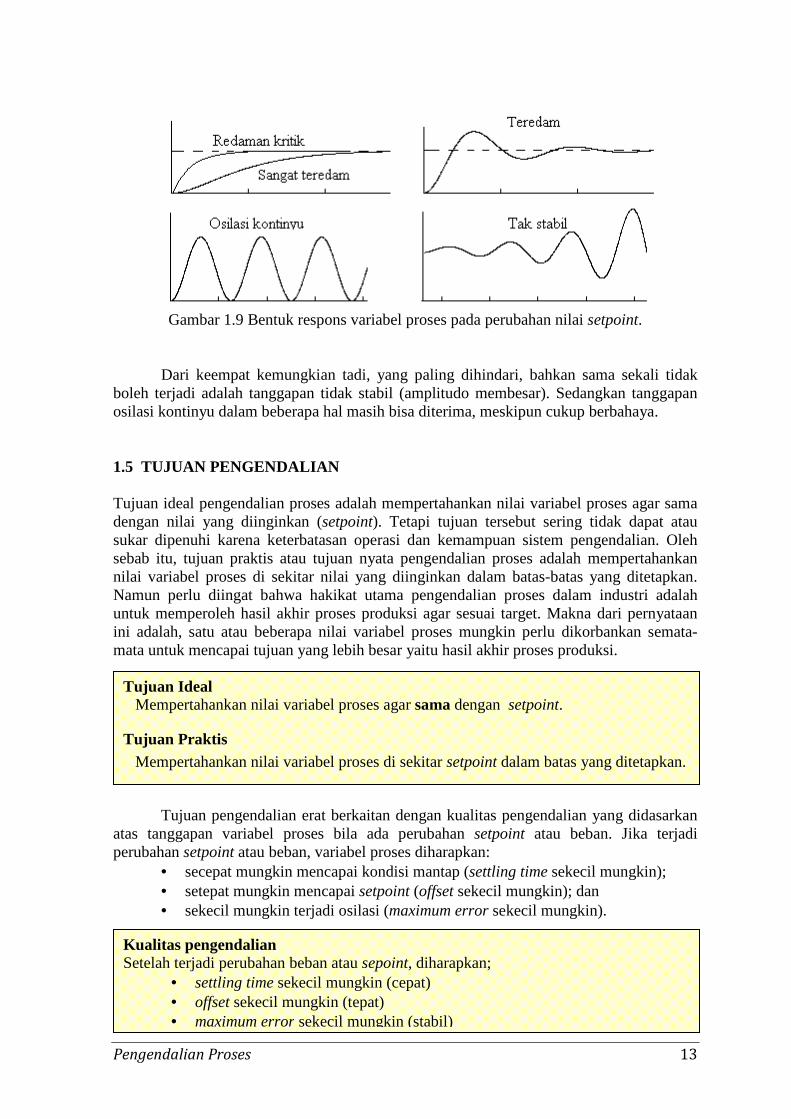
1.4 TANGGAPAN TRANSIEN SISTEM PENGENDALIAN Dalam sistem pengendalian umpan balik, variabel proses terkendali dipengaruhi oleh setpoint dan beban (gangguan). Perubahan setpoint dapat dilakukan oleh operator atau pengendali lain. Sedangkan beban dapat berubah secara acak tergantung sistem proses dan lingkungannya. Jika terjadi perubahan setpoint atau beban, idealnya nilai variabel proses terkendali selalu sama dengan setpoint. Tetapi kondisi demikian tidak selalu dapat diperoleh. Variabel proses mungkin akan mengalami beberapa cara perubahan, yaitu: sangat teredam (overdamped), redaman kritik (critically damped), teredam (underdamped), osilasi kontinyu (sustained oscillation), atau tidak stabil (amplitudo membesar). Tanggapan tanpa osilasi bersifat lambat namun stabil. Tanggapan redaman kritik merupakan batas mulai terjadi osilasi teredam. Sedangkan tanggapan osilasi teredam mengalami sedikit gelombang di awal perubahan, dan selanjutnya amplitudo mengecil dan akhirnya hilang. Tanggapan ini cukup cepat meskipun sedikit terjadi ketidakstabilan. Pada tanggapan dengan osilasi kontinyu, variabel proses secara terus menerus bergelombang dengan amplitudo dan frekuensi yang tetap. Terakhir, tanggapan tak stabil, memiliki amplitudo membesar. Kondisi denikian sangat berbahaya karena dapat merusak sistem keseluruhan.
Pengendalian Proses 13
Gambar 1.9 Bentuk respons variabel proses pada perubahan nilai setpoint.
Dari keempat kemungkian tadi, yang paling dihindari, bahkan sama sekali tidak boleh terjadi adalah tanggapan tidak stabil (amplitudo membesar). Sedangkan tanggapan osilasi kontinyu dalam beberapa hal masih bisa diterima, meskipun cukup berbahaya.
1.5 TUJUAN PENGENDALIAN Tujuan ideal pengendalian proses adalah mempertahankan nilai variabel proses agar sama dengan nilai yang diinginkan (setpoint). Tetapi tujuan tersebut sering tidak dapat atau sukar dipenuhi karena keterbatasan operasi dan kemampuan sistem pengendalian. Oleh sebab itu, tujuan praktis atau tujuan nyata pengendalian proses adalah mempertahankan nilai variabel proses di sekitar nilai yang diinginkan dalam batas-batas yang ditetapkan. Namun perlu diingat bahwa hakikat utama pengendalian proses dalam industri adalah untuk memperoleh hasil akhir proses produksi agar sesuai target. Makna dari pernyataan ini adalah, satu atau beberapa nilai variabel proses mungkin perlu dikorbankan semata-mata untuk mencapai tujuan yang lebih besar yaitu hasil akhir proses produksi. Tujuan pengendalian erat berkaitan dengan kualitas pengendalian yang didasarkan atas tanggapan variabel proses bila ada perubahan setpoint atau beban. Jika terjadi perubahan setpoint atau beban, variabel proses diharapkan:
• secepat mungkin mencapai kondisi mantap (settling time sekecil mungkin); • setepat mungkin mencapai setpoint (offset sekecil mungkin); dan • sekecil mungkin terjadi osilasi (maximum error sekecil mungkin).
Tujuan Ideal Mempertahankan nilai variabel proses agar sama dengan setpoint.
Tujuan Praktis Mempertahankan nilai variabel proses di sekitar setpoint dalam batas yang ditetapkan.
Kualitas pengendalian Setelah terjadi perubahan beban atau sepoint, diharapkan;
• settling time sekecil mungkin (cepat) • offset sekecil mungkin (tepat) • maximum error sekecil mungkin (stabil)
Pengendalian Proses 14
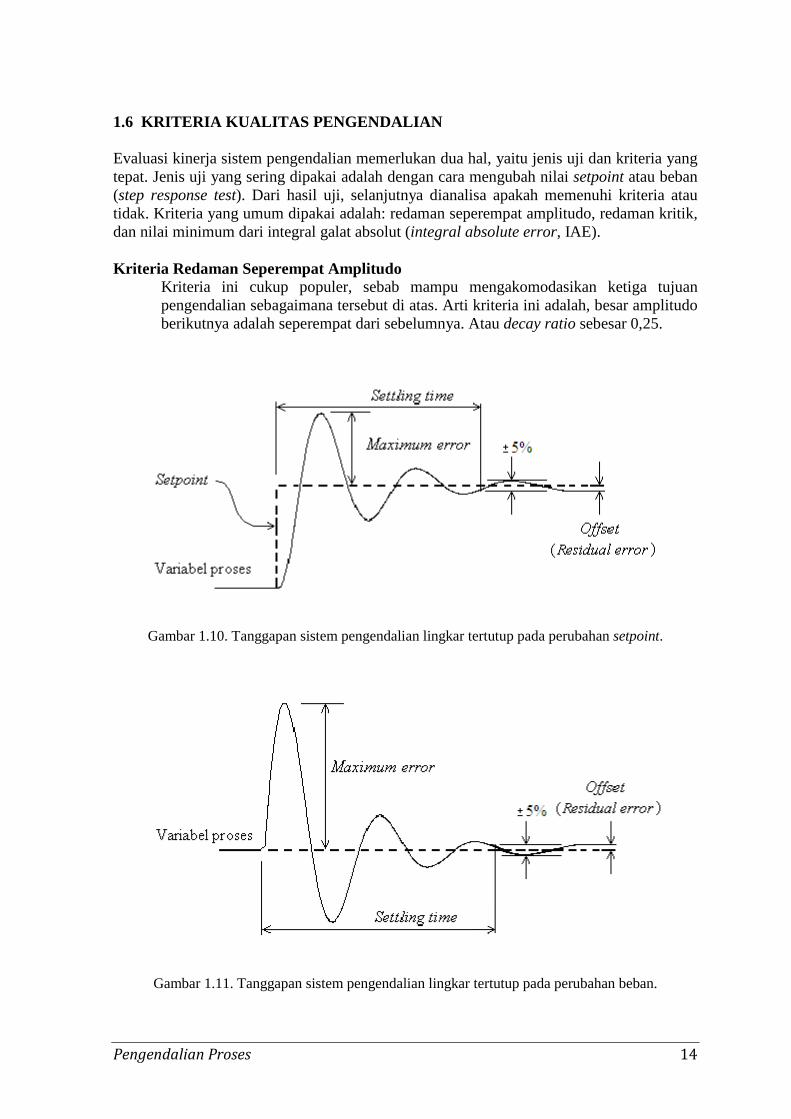
1.6 KRITERIA KUALITAS PENGENDALIAN Evaluasi kinerja sistem pengendalian memerlukan dua hal, yaitu jenis uji dan kriteria yang tepat. Jenis uji yang sering dipakai adalah dengan cara mengubah nilai setpoint atau beban (step response test). Dari hasil uji, selanjutnya dianalisa apakah memenuhi kriteria atau tidak. Kriteria yang umum dipakai adalah: redaman seperempat amplitudo, redaman kritik, dan nilai minimum dari integral galat absolut (integral absolute error, IAE). Kriteria Redaman Seperempat Amplitudo
Kriteria ini cukup populer, sebab mampu mengakomodasikan ketiga tujuan pengendalian sebagaimana tersebut di atas. Arti kriteria ini adalah, besar amplitudo berikutnya adalah seperempat dari sebelumnya. Atau decay ratio sebesar 0,25.
Gambar 1.10. Tanggapan sistem pengendalian lingkar tertutup pada perubahan setpoint.
Gambar 1.11. Tanggapan sistem pengendalian lingkar tertutup pada perubahan beban.
Pengendalian Proses 15
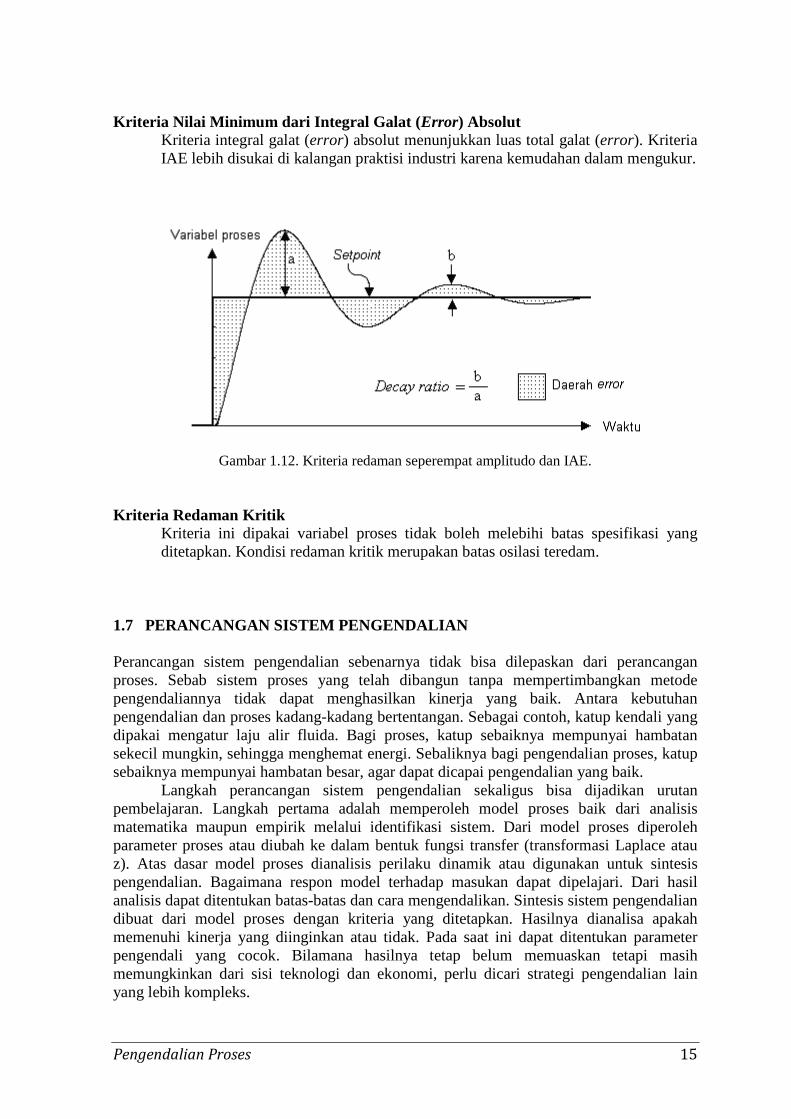
Kriteria Nilai Minimum dari Integral Galat (Error) Absolut Kriteria integral galat (error) absolut menunjukkan luas total galat (error). Kriteria IAE lebih disukai di kalangan praktisi industri karena kemudahan dalam mengukur.
Gambar 1.12. Kriteria redaman seperempat amplitudo dan IAE.
Kriteria Redaman Kritik Kriteria ini dipakai variabel proses tidak boleh melebihi batas spesifikasi yang ditetapkan. Kondisi redaman kritik merupakan batas osilasi teredam.
1.7 PERANCANGAN SISTEM PENGENDALIAN Perancangan sistem pengendalian sebenarnya tidak bisa dilepaskan dari perancangan proses. Sebab sistem proses yang telah dibangun tanpa mempertimbangkan metode pengendaliannya tidak dapat menghasilkan kinerja yang baik. Antara kebutuhan pengendalian dan proses kadang-kadang bertentangan. Sebagai contoh, katup kendali yang dipakai mengatur laju alir fluida. Bagi proses, katup sebaiknya mempunyai hambatan sekecil mungkin, sehingga menghemat energi. Sebaliknya bagi pengendalian proses, katup sebaiknya mempunyai hambatan besar, agar dapat dicapai pengendalian yang baik.
Langkah perancangan sistem pengendalian sekaligus bisa dijadikan urutan pembelajaran. Langkah pertama adalah memperoleh model proses baik dari analisis matematika maupun empirik melalui identifikasi sistem. Dari model proses diperoleh parameter proses atau diubah ke dalam bentuk fungsi transfer (transformasi Laplace atau z). Atas dasar model proses dianalisis perilaku dinamik atau digunakan untuk sintesis pengendalian. Bagaimana respon model terhadap masukan dapat dipelajari. Dari hasil analisis dapat ditentukan batas-batas dan cara mengendalikan. Sintesis sistem pengendalian dibuat dari model proses dengan kriteria yang ditetapkan. Hasilnya dianalisa apakah memenuhi kinerja yang diinginkan atau tidak. Pada saat ini dapat ditentukan parameter pengendali yang cocok. Bilamana hasilnya tetap belum memuaskan tetapi masih memungkinkan dari sisi teknologi dan ekonomi, perlu dicari strategi pengendalian lain yang lebih kompleks.
Pengendalian Proses 16
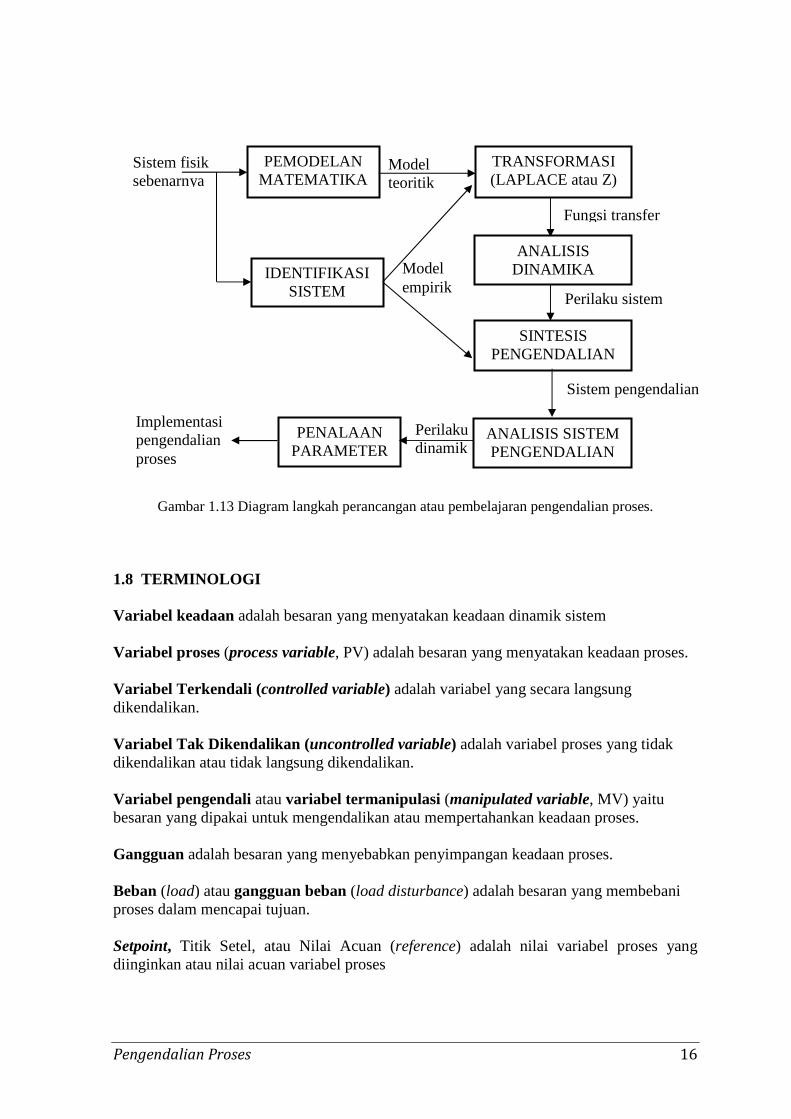
Gambar 1.13 Diagram langkah perancangan atau pembelajaran pengendalian proses. 1.8 TERMINOLOGI Variabel keadaan adalah besaran yang menyatakan keadaan dinamik sistem Variabel proses (process variable, PV) adalah besaran yang menyatakan keadaan proses. Variabel Terkendali (controlled variable) adalah variabel yang secara langsung dikendalikan. Variabel Tak Dikendalikan (uncontrolled variable) adalah variabel proses yang tidak dikendalikan atau tidak langsung dikendalikan. Variabel pengendali atau variabel termanipulasi (manipulated variable, MV) yaitu besaran yang dipakai untuk mengendalikan atau mempertahankan keadaan proses. Gangguan adalah besaran yang menyebabkan penyimpangan keadaan proses. Beban (load) atau gangguan beban (load disturbance) adalah besaran yang membebani proses dalam mencapai tujuan. Setpoint, Titik Setel, atau Nilai Acuan (reference) adalah nilai variabel proses yang diinginkan atau nilai acuan variabel proses
PEMODELAN MATEMATIKA
TRANSFORMASI (LAPLACE atau Z)
Sistem fisik sebenarnya
Model teoritik
Fungsi transfer
ANALISIS DINAMIKA
Perilaku sistem
SINTESIS PENGENDALIAN
Sistem pengendalian
IDENTIFIKASI SISTEM
Model empirik
ANALISIS SISTEM PENGENDALIAN
PENALAAN PARAMETER
Perilaku dinamika
Implementasi pengendalian proses
Pengendalian Proses 17
SOAL-SOAL A. ULANGAN 1. Apa peranan pengendalian proses di pabrik kimia? 2. Perhatikan pengendalian suhu pada setrika listrik.
(a) Apa yang dikendalikan? (b) Apa yang dipakai mengendalikan? (c) Jelaskan mekanisme kerja pengendaliannya!
3. Apa hakikat utama dan tujuan pengendalian proses? 4. Apa arti kriteria redaman seperempat amplitudo, redaman kritik, dan IAE? B. PILIHAN GANDA Pilih satu jawab yang benar. 1. Hal berikut bukan merupakan sebab mengapa proses perlu dikendalikan,
A. Agar PV sesuai yang diinginkan B. Agar MV di sekitar 50% C. Keamanan proses D. Efisiensi energi
2. Hal berikut bukan alasan mengapa perlu pengendalian proses…
A. proses berlangsung aman B. operasi berlangsung halus (tidak berfluktuasi) C. keuntungan yang besar D. variabel pengendali tidak berfluktuasi
3. Tersebut di bawah alasan sistem proses perlu dikendalikan, kecuali …
A. nilai variabel proses tetap B. nilai manipulated variable tetap C. nilai variabel proses dan setpoint sama D. energi minimum
4. Arti kriteria redaman seperempat amplitudo adalah…
A. perbandingan puncak dan puncak yang berurutan = 0,25 B. perbandingan puncak dan lembah yang berurutan = 0,25 C. perbandingan lembah dan puncak yang berurutan = 0,25 D. persentase overshoot = 25%
5. Kriteria kontrol yang menunjukkan error maksimum adalah A. settling time B. offset C. overshoot dan offset D. overshoot
6. Kriteria kontrol meliputi besaran yang berkaitan dengan ketepatan respons adalah …
A. overshoot B. settling time C. offset D. offset dan settling time

Pengendalian Proses 18
7. Kriteria kontrol meliputi besaran:
(1) overshoot, (2) settling time, dan (3) offset.
Dari ketiga besaran, yang menunjukkan kecepatan respon adalah A. 1 B. 2 C. 3 D. 1 dan 3
8. Diameter maksimum produk 0,5 mm. Kriteria pengendalian yang cocok adalah…
A. redaman seperempat amplitudo B. redaman kritik C. nilai minimum dari integral error absolut D. redaman seperempat amplitudo dan redaman kritik
9. Sistem pengendalian dilakukan dengan mengatur besar manipulated variable tanpa mengukur variabel proses. Ini adalah sistem pengendalian... A. umpan balik B. lingkar tertutup C. lingkar terbuka D. otomatik
10. Pada contoh pengendalian proses yang telah dibahas, ternyata suhu aliran proses keluar
dipengaruhi oleh kehilangan panas ke lingkungan. Maka kehilangan panas termasuk... A. variabel proses B. manipulated variable C. error D. gangguan beban
Pengendalian Proses 19
BAB-2
INSTRUMEN SISTEM PENGENDALIAN
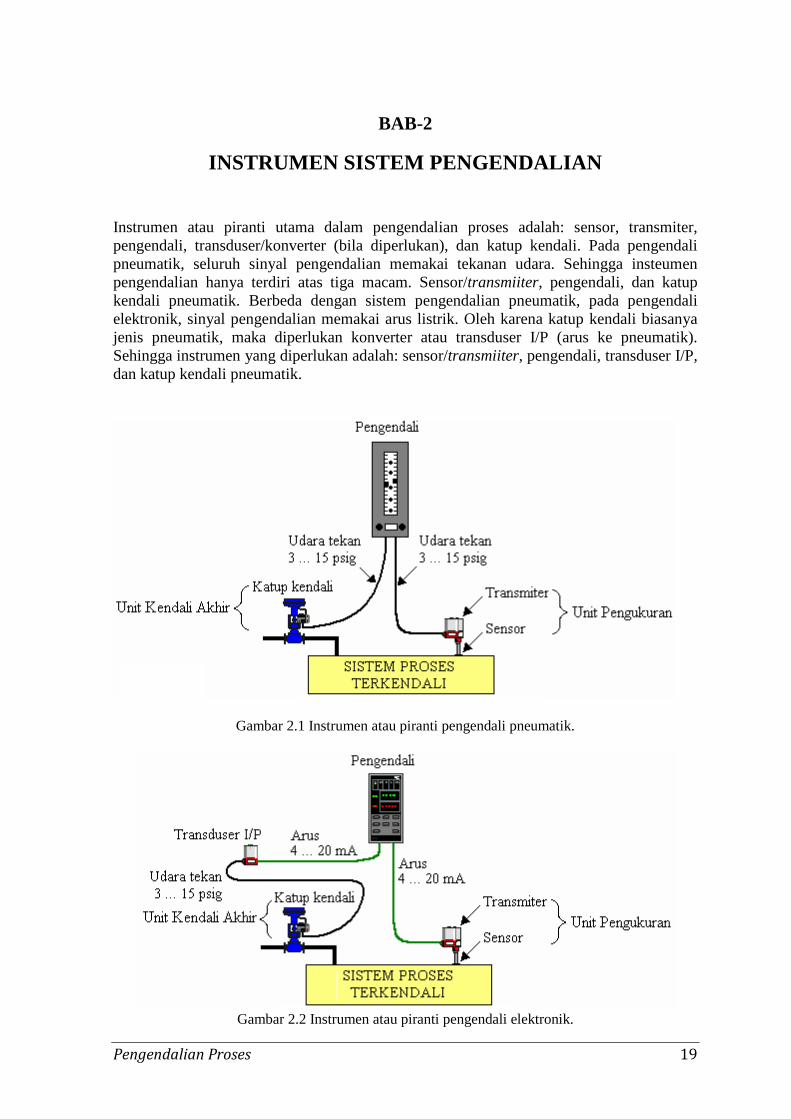
Instrumen atau piranti utama dalam pengendalian proses adalah: sensor, transmiter, pengendali, transduser/konverter (bila diperlukan), dan katup kendali. Pada pengendali pneumatik, seluruh sinyal pengendalian memakai tekanan udara. Sehingga insteumen pengendalian hanya terdiri atas tiga macam. Sensor/transmiiter, pengendali, dan katup kendali pneumatik. Berbeda dengan sistem pengendalian pneumatik, pada pengendali elektronik, sinyal pengendalian memakai arus listrik. Oleh karena katup kendali biasanya jenis pneumatik, maka diperlukan konverter atau transduser I/P (arus ke pneumatik). Sehingga instrumen yang diperlukan adalah: sensor/transmiiter, pengendali, transduser I/P, dan katup kendali pneumatik.
Gambar 2.1 Instrumen atau piranti pengendali pneumatik.
Gambar 2.2 Instrumen atau piranti pengendali elektronik.
Pengendalian Proses 20
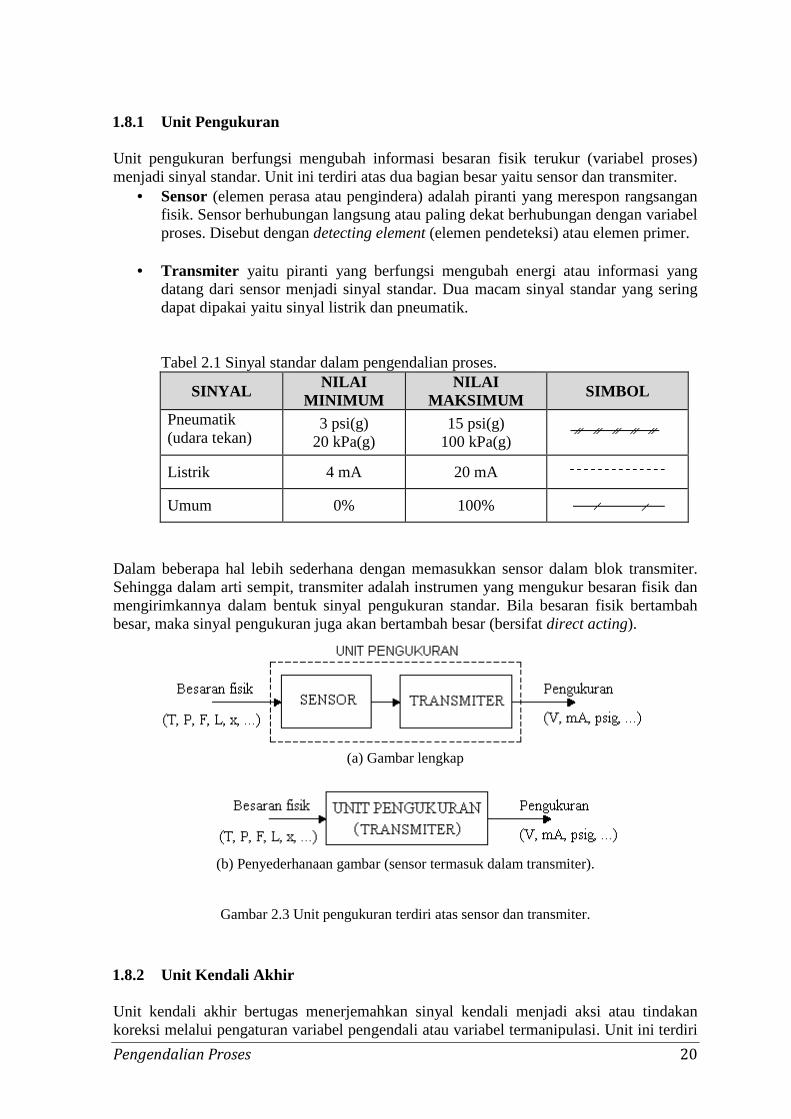
1.8.1 Unit Pengukuran Unit pengukuran berfungsi mengubah informasi besaran fisik terukur (variabel proses) menjadi sinyal standar. Unit ini terdiri atas dua bagian besar yaitu sensor dan transmiter.
• Sensor (elemen perasa atau pengindera) adalah piranti yang merespon rangsangan fisik. Sensor berhubungan langsung atau paling dekat berhubungan dengan variabel proses. Disebut dengan detecting element (elemen pendeteksi) atau elemen primer.
• Transmiter yaitu piranti yang berfungsi mengubah energi atau informasi yang
datang dari sensor menjadi sinyal standar. Dua macam sinyal standar yang sering dapat dipakai yaitu sinyal listrik dan pneumatik.
Tabel 2.1 Sinyal standar dalam pengendalian proses.
SINYAL NILAI
MINIMUM NILAI
MAKSIMUM SIMBOL
Pneumatik (udara tekan)
3 psi(g) 20 kPa(g)
15 psi(g) 100 kPa(g)
Listrik 4 mA 20 mA
Umum 0% 100%
Dalam beberapa hal lebih sederhana dengan memasukkan sensor dalam blok transmiter. Sehingga dalam arti sempit, transmiter adalah instrumen yang mengukur besaran fisik dan mengirimkannya dalam bentuk sinyal pengukuran standar. Bila besaran fisik bertambah besar, maka sinyal pengukuran juga akan bertambah besar (bersifat direct acting).
(a) Gambar lengkap
(b) Penyederhanaan gambar (sensor termasuk dalam transmiter).
Gambar 2.3 Unit pengukuran terdiri atas sensor dan transmiter.
1.8.2 Unit Kendali Akhir Unit kendali akhir bertugas menerjemahkan sinyal kendali menjadi aksi atau tindakan koreksi melalui pengaturan variabel pengendali atau variabel termanipulasi. Unit ini terdiri
Pengendalian Proses 21
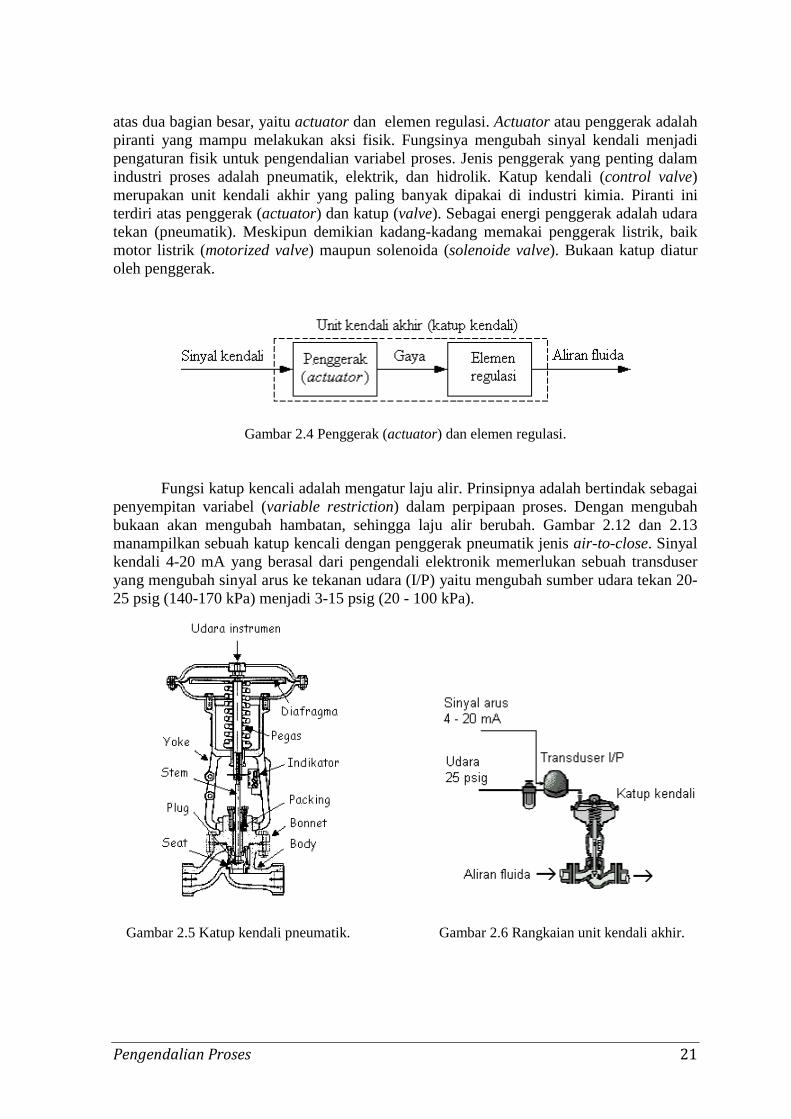
atas dua bagian besar, yaitu actuator dan elemen regulasi. Actuator atau penggerak adalah piranti yang mampu melakukan aksi fisik. Fungsinya mengubah sinyal kendali menjadi pengaturan fisik untuk pengendalian variabel proses. Jenis penggerak yang penting dalam industri proses adalah pneumatik, elektrik, dan hidrolik. Katup kendali (control valve) merupakan unit kendali akhir yang paling banyak dipakai di industri kimia. Piranti ini terdiri atas penggerak (actuator) dan katup (valve). Sebagai energi penggerak adalah udara tekan (pneumatik). Meskipun demikian kadang-kadang memakai penggerak listrik, baik motor listrik (motorized valve) maupun solenoida (solenoide valve). Bukaan katup diatur oleh penggerak.
Gambar 2.4 Penggerak (actuator) dan elemen regulasi.
Fungsi katup kencali adalah mengatur laju alir. Prinsipnya adalah bertindak sebagai penyempitan variabel (variable restriction) dalam perpipaan proses. Dengan mengubah bukaan akan mengubah hambatan, sehingga laju alir berubah. Gambar 2.12 dan 2.13 manampilkan sebuah katup kencali dengan penggerak pneumatik jenis air-to-close. Sinyal kendali 4-20 mA yang berasal dari pengendali elektronik memerlukan sebuah transduser yang mengubah sinyal arus ke tekanan udara (I/P) yaitu mengubah sumber udara tekan 20-25 psig (140-170 kPa) menjadi 3-15 psig (20 - 100 kPa).
Gambar 2.5 Katup kendali pneumatik. Gambar 2.6 Rangkaian unit kendali akhir.
Pengendalian Proses 22
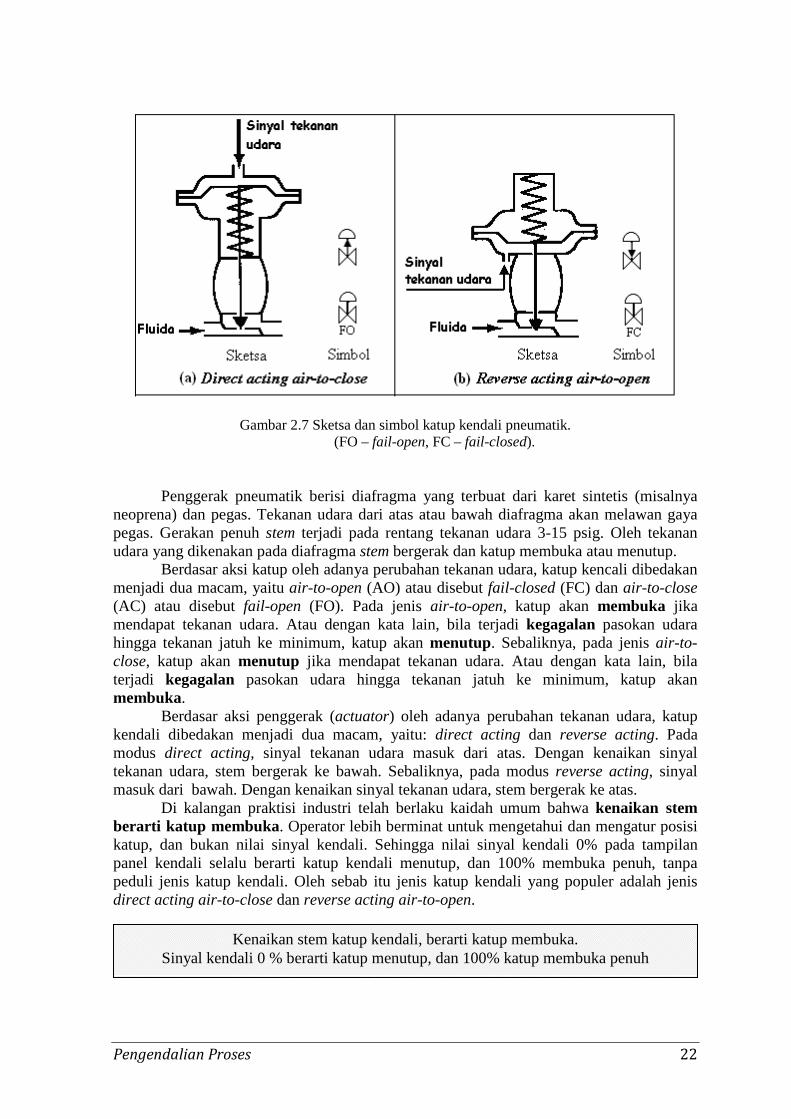
Gambar 2.7 Sketsa dan simbol katup kendali pneumatik. (FO – fail-open, FC – fail-closed). Penggerak pneumatik berisi diafragma yang terbuat dari karet sintetis (misalnya neoprena) dan pegas. Tekanan udara dari atas atau bawah diafragma akan melawan gaya pegas. Gerakan penuh stem terjadi pada rentang tekanan udara 3-15 psig. Oleh tekanan udara yang dikenakan pada diafragma stem bergerak dan katup membuka atau menutup. Berdasar aksi katup oleh adanya perubahan tekanan udara, katup kencali dibedakan menjadi dua macam, yaitu air-to-open (AO) atau disebut fail-closed (FC) dan air-to-close (AC) atau disebut fail-open (FO). Pada jenis air-to-open, katup akan membuka jika mendapat tekanan udara. Atau dengan kata lain, bila terjadi kegagalan pasokan udara hingga tekanan jatuh ke minimum, katup akan menutup. Sebaliknya, pada jenis air-to-close, katup akan menutup jika mendapat tekanan udara. Atau dengan kata lain, bila terjadi kegagalan pasokan udara hingga tekanan jatuh ke minimum, katup akan membuka. Berdasar aksi penggerak (actuator) oleh adanya perubahan tekanan udara, katup kendali dibedakan menjadi dua macam, yaitu: direct acting dan reverse acting. Pada modus direct acting, sinyal tekanan udara masuk dari atas. Dengan kenaikan sinyal tekanan udara, stem bergerak ke bawah. Sebaliknya, pada modus reverse acting, sinyal masuk dari bawah. Dengan kenaikan sinyal tekanan udara, stem bergerak ke atas. Di kalangan praktisi industri telah berlaku kaidah umum bahwa kenaikan stem berarti katup membuka. Operator lebih berminat untuk mengetahui dan mengatur posisi katup, dan bukan nilai sinyal kendali. Sehingga nilai sinyal kendali 0% pada tampilan panel kendali selalu berarti katup kendali menutup, dan 100% membuka penuh, tanpa peduli jenis katup kendali. Oleh sebab itu jenis katup kendali yang populer adalah jenis direct acting air-to-close dan reverse acting air-to-open.
Kenaikan stem katup kendali, berarti katup membuka. Sinyal kendali 0 % berarti katup menutup, dan 100% katup membuka penuh
Pengendalian Proses 23
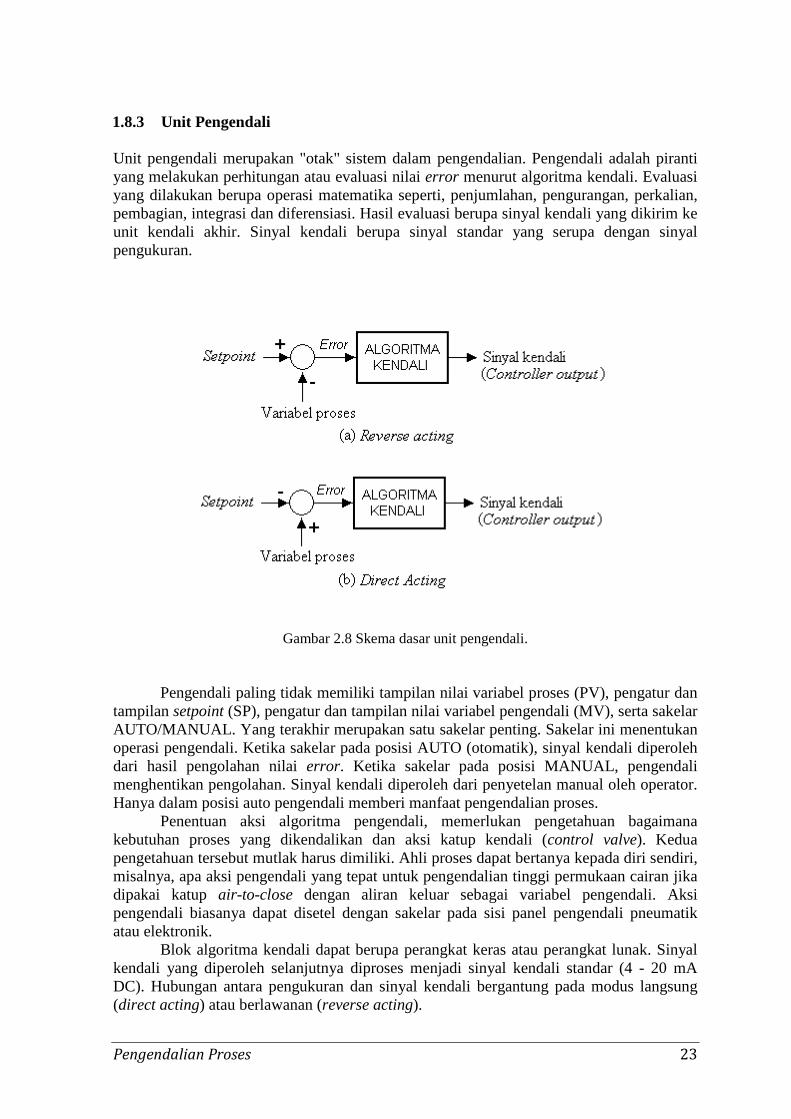
1.8.3 Unit Pengendali Unit pengendali merupakan "otak" sistem dalam pengendalian. Pengendali adalah piranti yang melakukan perhitungan atau evaluasi nilai error menurut algoritma kendali. Evaluasi yang dilakukan berupa operasi matematika seperti, penjumlahan, pengurangan, perkalian, pembagian, integrasi dan diferensiasi. Hasil evaluasi berupa sinyal kendali yang dikirim ke unit kendali akhir. Sinyal kendali berupa sinyal standar yang serupa dengan sinyal pengukuran.
Gambar 2.8 Skema dasar unit pengendali. Pengendali paling tidak memiliki tampilan nilai variabel proses (PV), pengatur dan tampilan setpoint (SP), pengatur dan tampilan nilai variabel pengendali (MV), serta sakelar AUTO/MANUAL. Yang terakhir merupakan satu sakelar penting. Sakelar ini menentukan operasi pengendali. Ketika sakelar pada posisi AUTO (otomatik), sinyal kendali diperoleh dari hasil pengolahan nilai error. Ketika sakelar pada posisi MANUAL, pengendali menghentikan pengolahan. Sinyal kendali diperoleh dari penyetelan manual oleh operator. Hanya dalam posisi auto pengendali memberi manfaat pengendalian proses. Penentuan aksi algoritma pengendali, memerlukan pengetahuan bagaimana kebutuhan proses yang dikendalikan dan aksi katup kendali (control valve). Kedua pengetahuan tersebut mutlak harus dimiliki. Ahli proses dapat bertanya kepada diri sendiri, misalnya, apa aksi pengendali yang tepat untuk pengendalian tinggi permukaan cairan jika dipakai katup air-to-close dengan aliran keluar sebagai variabel pengendali. Aksi pengendali biasanya dapat disetel dengan sakelar pada sisi panel pengendali pneumatik atau elektronik. Blok algoritma kendali dapat berupa perangkat keras atau perangkat lunak. Sinyal kendali yang diperoleh selanjutnya diproses menjadi sinyal kendali standar (4 - 20 mA DC). Hubungan antara pengukuran dan sinyal kendali bergantung pada modus langsung (direct acting) atau berlawanan (reverse acting).
Pengendalian Proses 24
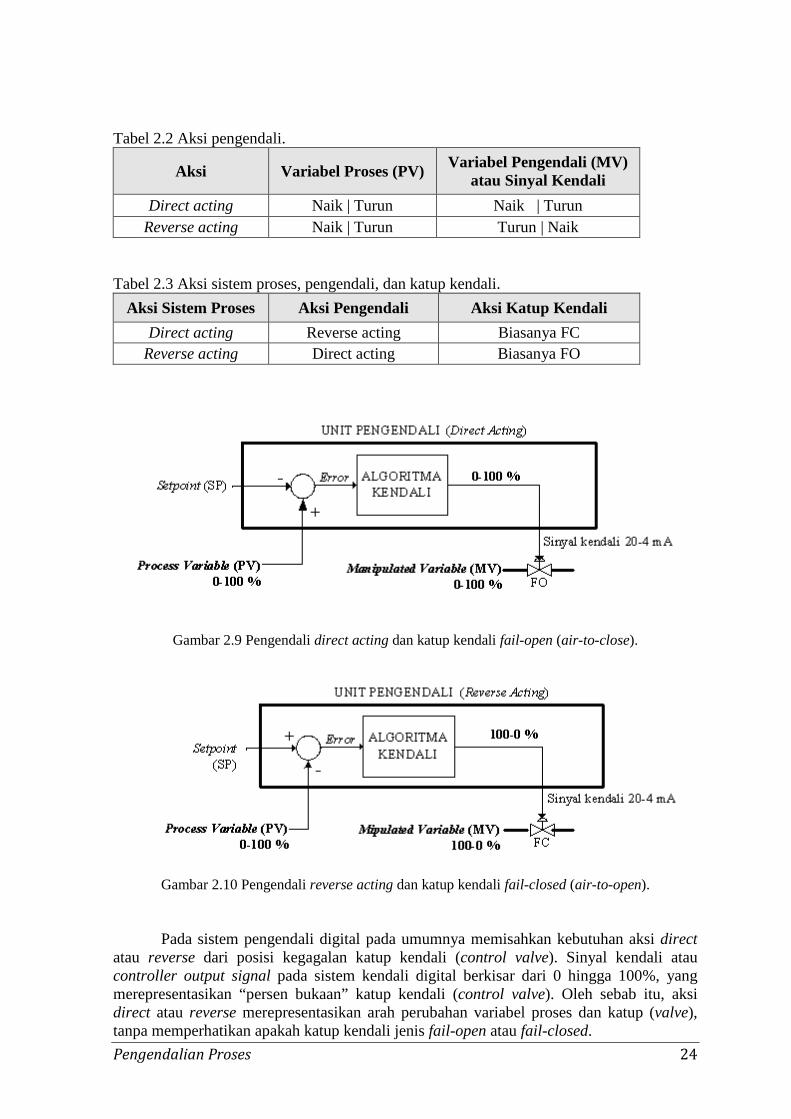
Tabel 2.2 Aksi pengendali.
Aksi Variabel Proses (PV) Variabel Pengendali (MV)
atau Sinyal Kendali
Direct acting Naik | Turun Naik | Turun Reverse acting Naik | Turun Turun | Naik
Tabel 2.3 Aksi sistem proses, pengendali, dan katup kendali.
Aksi Sistem Proses Aksi Pengendali Aksi Katup Kendali
Direct acting Reverse acting Biasanya FC Reverse acting Direct acting Biasanya FO
Gambar 2.9 Pengendali direct acting dan katup kendali fail-open (air-to-close).
Gambar 2.10 Pengendali reverse acting dan katup kendali fail-closed (air-to-open). Pada sistem pengendali digital pada umumnya memisahkan kebutuhan aksi direct atau reverse dari posisi kegagalan katup kendali (control valve). Sinyal kendali atau controller output signal pada sistem kendali digital berkisar dari 0 hingga 100%, yang merepresentasikan “persen bukaan” katup kendali (control valve). Oleh sebab itu, aksi direct atau reverse merepresentasikan arah perubahan variabel proses dan katup (valve), tanpa memperhatikan apakah katup kendali jenis fail-open atau fail-closed.
Pengendalian Proses 25
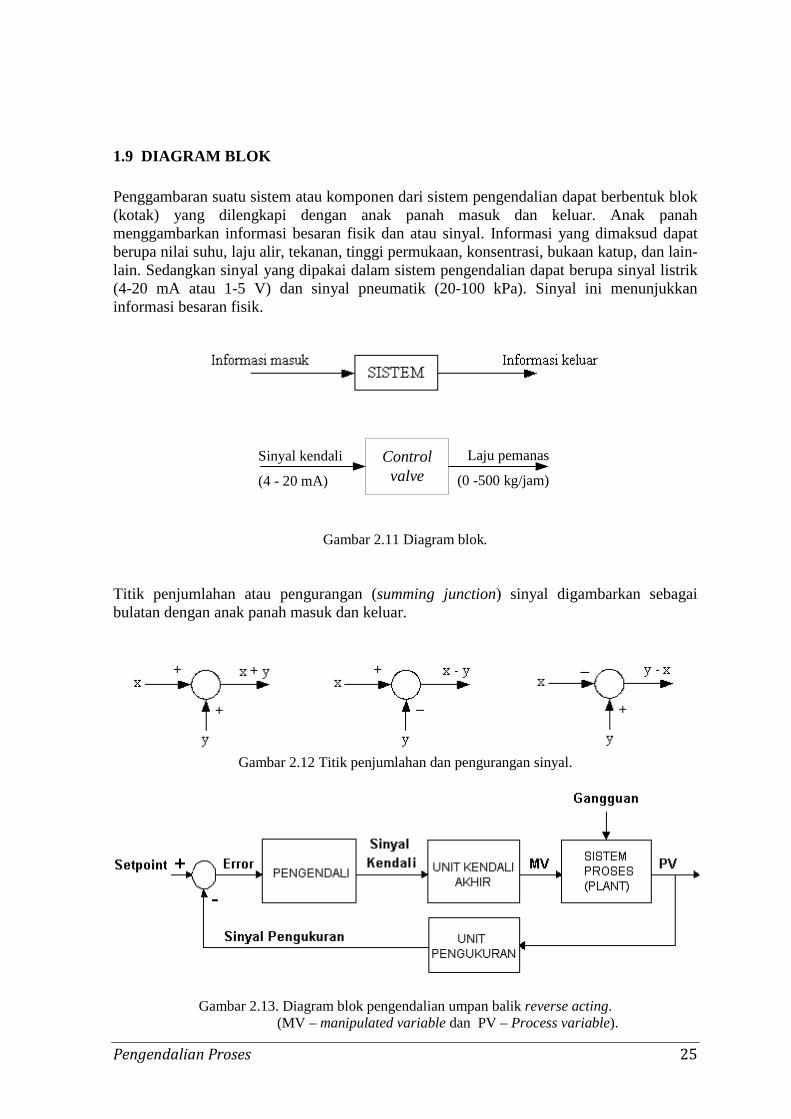
1.9 DIAGRAM BLOK Penggambaran suatu sistem atau komponen dari sistem pengendalian dapat berbentuk blok (kotak) yang dilengkapi dengan anak panah masuk dan keluar. Anak panah menggambarkan informasi besaran fisik dan atau sinyal. Informasi yang dimaksud dapat berupa nilai suhu, laju alir, tekanan, tinggi permukaan, konsentrasi, bukaan katup, dan lain-lain. Sedangkan sinyal yang dipakai dalam sistem pengendalian dapat berupa sinyal listrik (4-20 mA atau 1-5 V) dan sinyal pneumatik (20-100 kPa). Sinyal ini menunjukkan informasi besaran fisik.
Controlvalve
Sinyal kendali Laju pemanas
(4 - 20 mA) (0 -500 kg/jam)
Gambar 2.11 Diagram blok. Titik penjumlahan atau pengurangan (summing junction) sinyal digambarkan sebagai bulatan dengan anak panah masuk dan keluar.
Gambar 2.12 Titik penjumlahan dan pengurangan sinyal.
Gambar 2.13. Diagram blok pengendalian umpan balik reverse acting.
(MV – manipulated variable dan PV – Process variable).
Pengendalian Proses 26
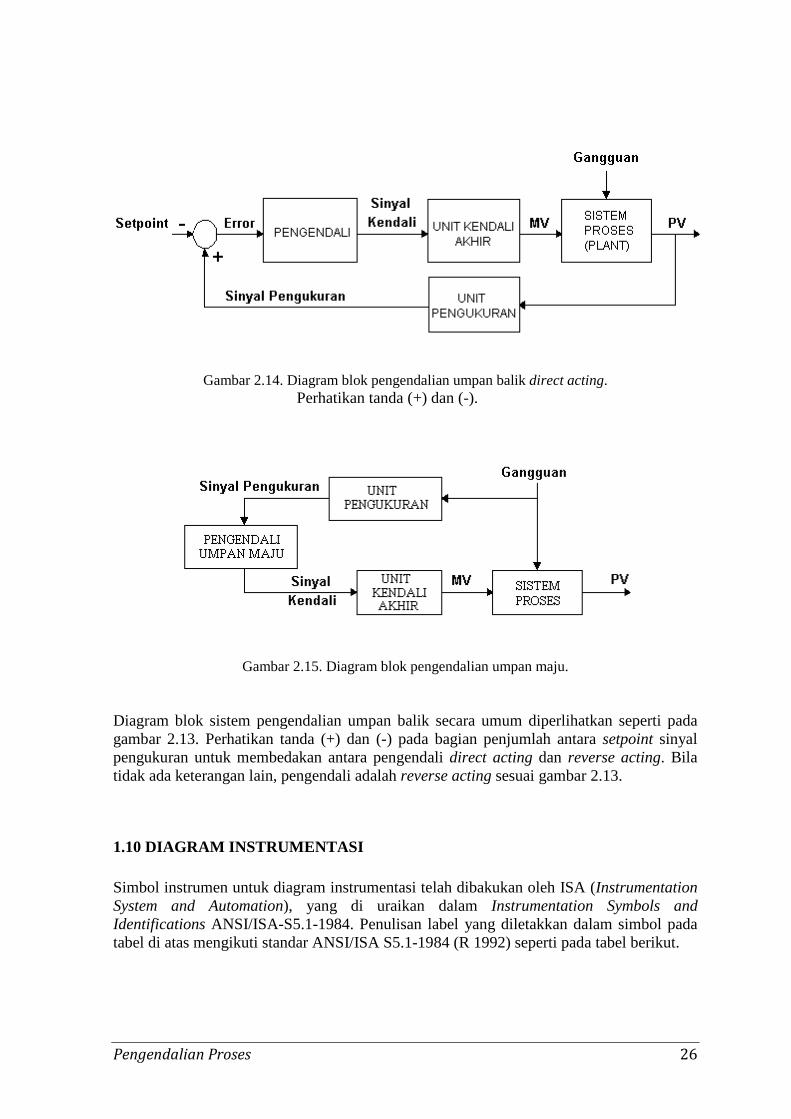
Gambar 2.14. Diagram blok pengendalian umpan balik direct acting. Perhatikan tanda (+) dan (-).
Gambar 2.15. Diagram blok pengendalian umpan maju. Diagram blok sistem pengendalian umpan balik secara umum diperlihatkan seperti pada gambar 2.13. Perhatikan tanda (+) dan (-) pada bagian penjumlah antara setpoint sinyal pengukuran untuk membedakan antara pengendali direct acting dan reverse acting. Bila tidak ada keterangan lain, pengendali adalah reverse acting sesuai gambar 2.13.
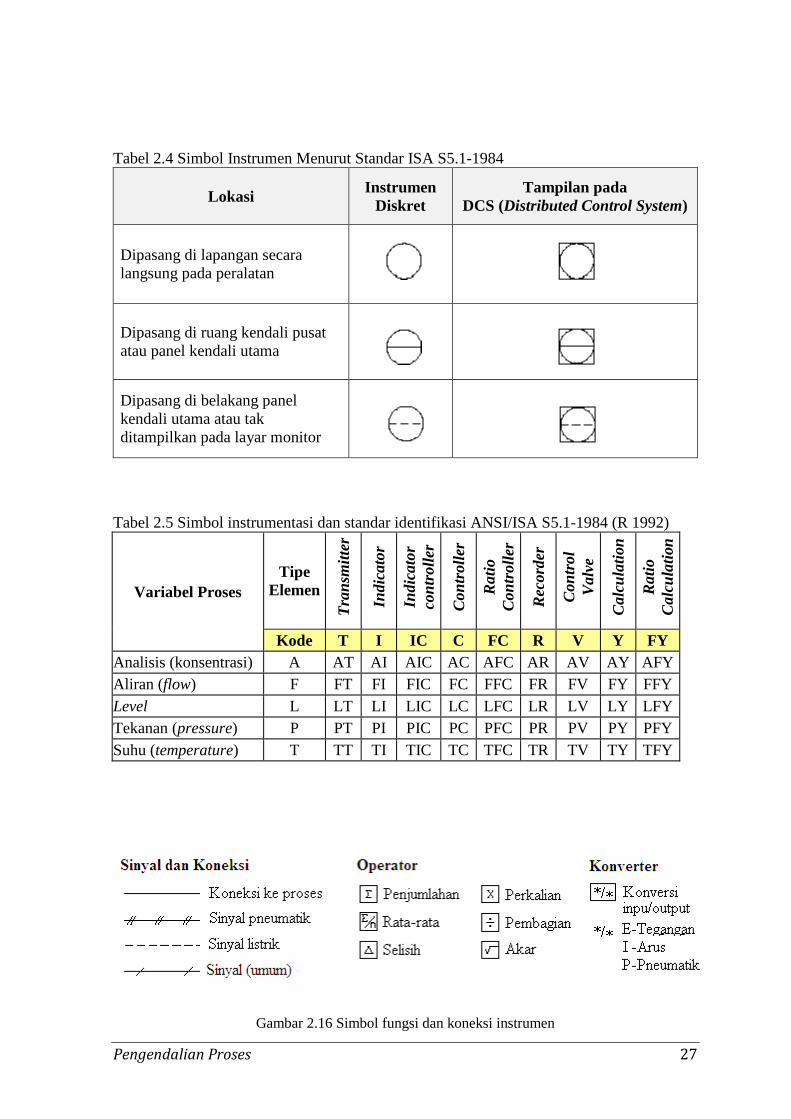
1.10 DIAGRAM INSTRUMENTASI Simbol instrumen untuk diagram instrumentasi telah dibakukan oleh ISA (Instrumentation System and Automation), yang di uraikan dalam Instrumentation Symbols and Identifications ANSI/ISA-S5.1-1984. Penulisan label yang diletakkan dalam simbol pada tabel di atas mengikuti standar ANSI/ISA S5.1-1984 (R 1992) seperti pada tabel berikut.
Pengendalian Proses 27
Tabel 2.4 Simbol Instrumen Menurut Standar ISA S5.1-1984
Lokasi Instrumen
Diskret Tampilan pada
DCS (Distributed Control System)
Dipasang di lapangan secara langsung pada peralatan
Dipasang di ruang kendali pusat atau panel kendali utama
Dipasang di belakang panel kendali utama atau tak ditampilkan pada layar monitor
Tabel 2.5 Simbol instrumentasi dan standar identifikasi ANSI/ISA S5.1-1984 (R 1992)
Variabel Proses Tipe
Elemen
Tra
nsm
itter
Indi
cato
r
Indi
cato
r co
ntro
ller
Con
trol
ler
Rat
io
Con
trol
ler
Rec
orde
r
Con
trol
V
alve
Cal
cula
tion
Rat
io
Cal
cula
tion
Kode T I IC C FC R V Y FY Analisis (konsentrasi) A AT AI AIC AC AFC AR AV AY AFY Aliran (flow) F FT FI FIC FC FFC FR FV FY FFY Level L LT LI LIC LC LFC LR LV LY LFY Tekanan (pressure) P PT PI PIC PC PFC PR PV PY PFY Suhu (temperature) T TT TI TIC TC TFC TR TV TY TFY
Gambar 2.16 Simbol fungsi dan koneksi instrumen
Pengendalian Proses 28
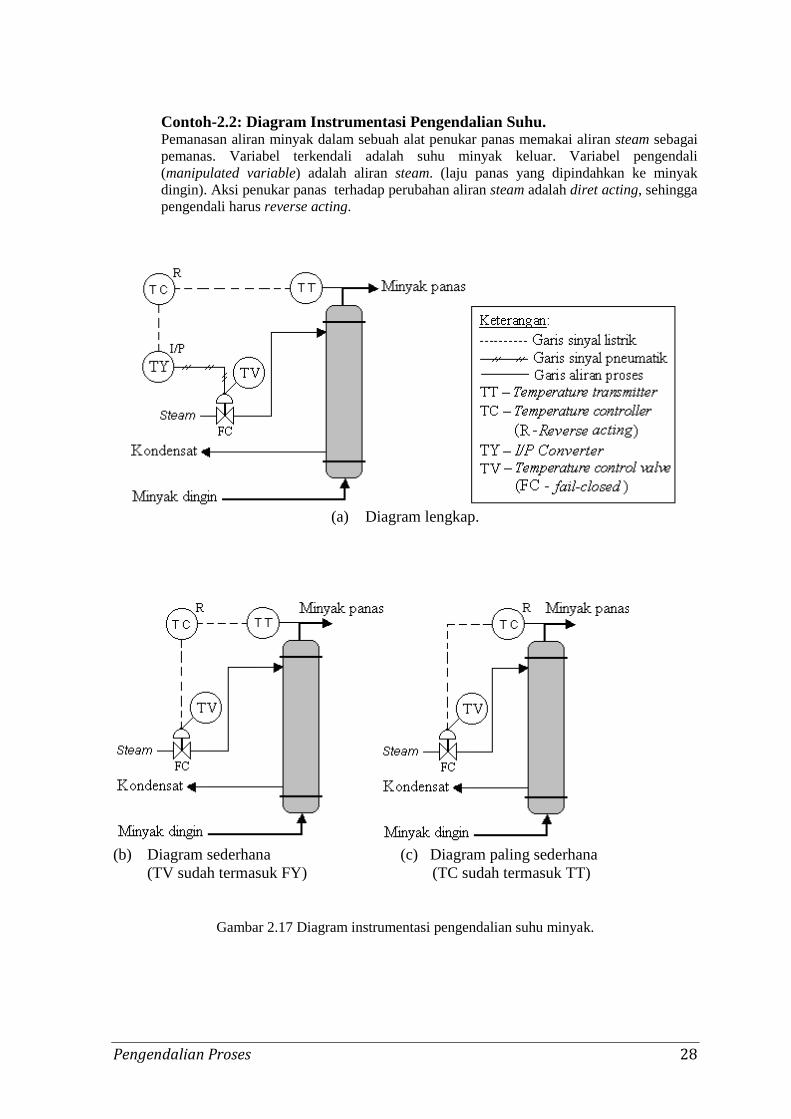
Contoh-2.2: Diagram Instrumentasi Pengendalian Suhu. Pemanasan aliran minyak dalam sebuah alat penukar panas memakai aliran steam sebagai pemanas. Variabel terkendali adalah suhu minyak keluar. Variabel pengendali (manipulated variable) adalah aliran steam. (laju panas yang dipindahkan ke minyak dingin). Aksi penukar panas terhadap perubahan aliran steam adalah diret acting, sehingga pengendali harus reverse acting.
(a) Diagram lengkap.
(b) Diagram sederhana (c) Diagram paling sederhana
(TV sudah termasuk FY) (TC sudah termasuk TT)
Gambar 2.17 Diagram instrumentasi pengendalian suhu minyak.
Pengendalian Proses 29
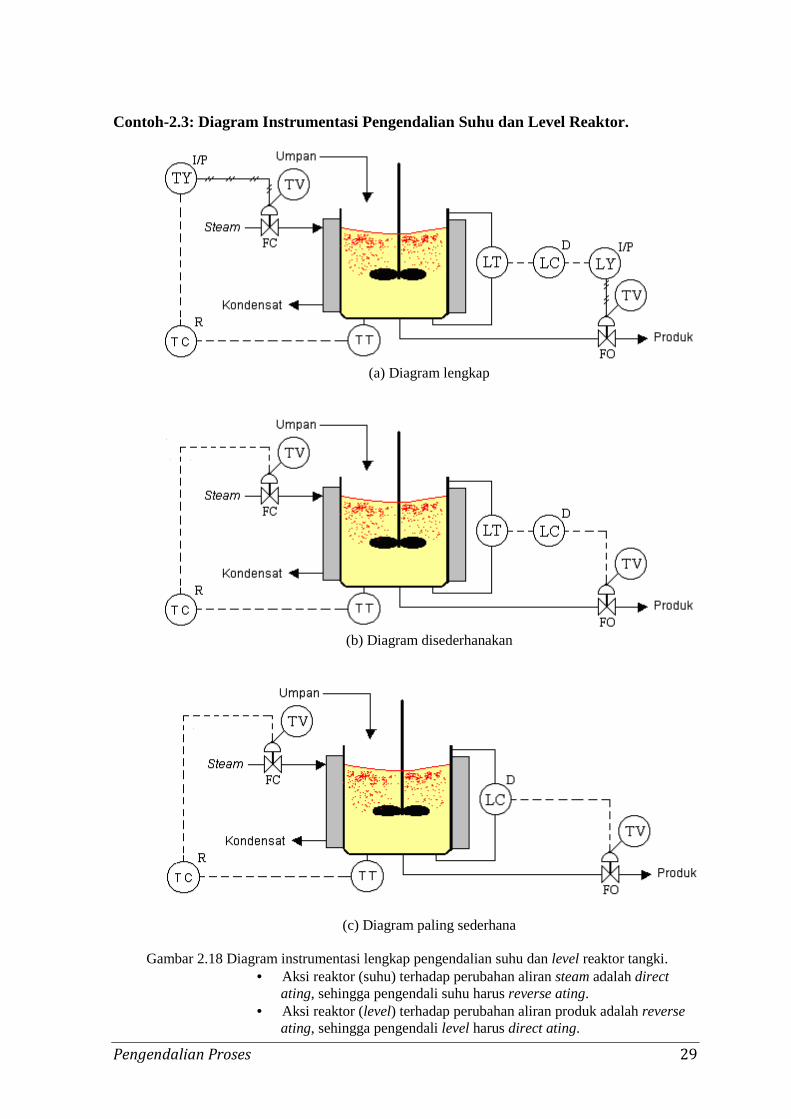
Contoh-2.3: Diagram Instrumentasi Pengendalian Suhu dan Level Reaktor.
(a) Diagram lengkap
(b) Diagram disederhanakan
(c) Diagram paling sederhana
Gambar 2.18 Diagram instrumentasi lengkap pengendalian suhu dan level reaktor tangki.
• Aksi reaktor (suhu) terhadap perubahan aliran steam adalah direct ating, sehingga pengendali suhu harus reverse ating.
• Aksi reaktor (level) terhadap perubahan aliran produk adalah reverse ating, sehingga pengendali level harus direct ating.
Pengendalian Proses 30
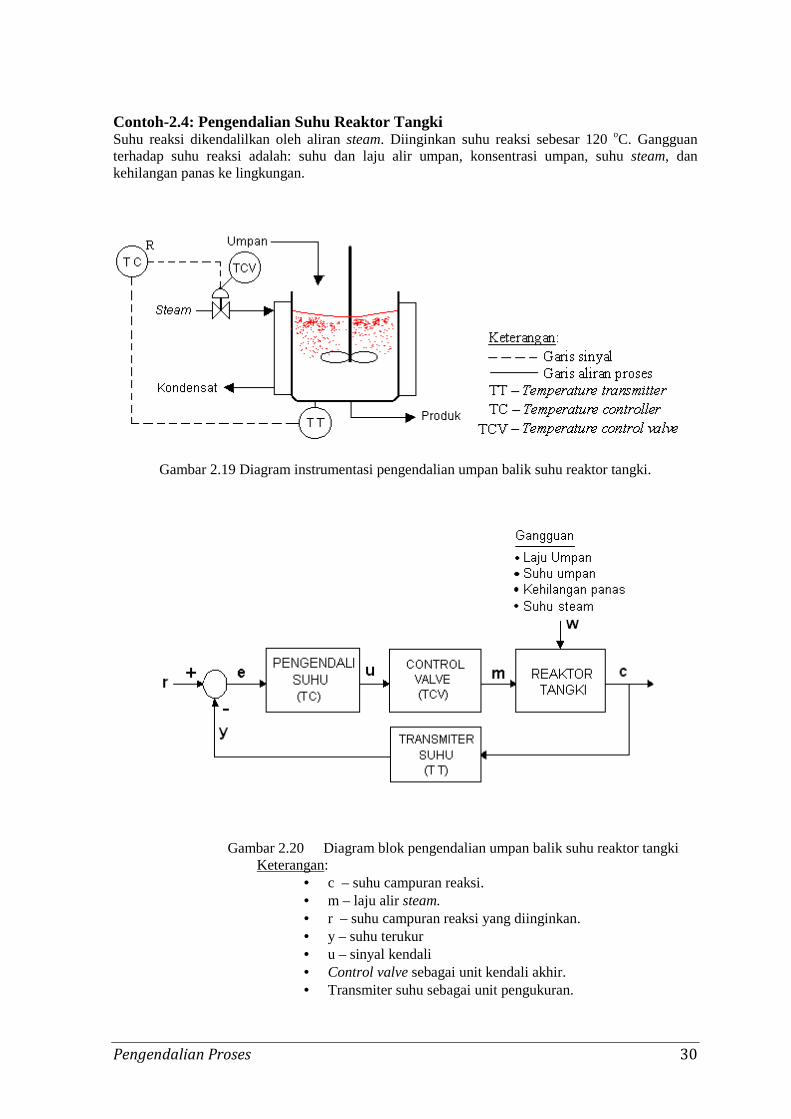
Contoh-2.4: Pengendalian Suhu Reaktor Tangki Suhu reaksi dikendalilkan oleh aliran steam. Diinginkan suhu reaksi sebesar 120 oC. Gangguan terhadap suhu reaksi adalah: suhu dan laju alir umpan, konsentrasi umpan, suhu steam, dan kehilangan panas ke lingkungan.
Gambar 2.19 Diagram instrumentasi pengendalian umpan balik suhu reaktor tangki.
Gambar 2.20 Diagram blok pengendalian umpan balik suhu reaktor tangki
Keterangan: • c – suhu campuran reaksi. • m – laju alir steam. • r – suhu campuran reaksi yang diinginkan. • y – suhu terukur • u – sinyal kendali • Control valve sebagai unit kendali akhir. • Transmiter suhu sebagai unit pengukuran.
Pengendalian Proses 31
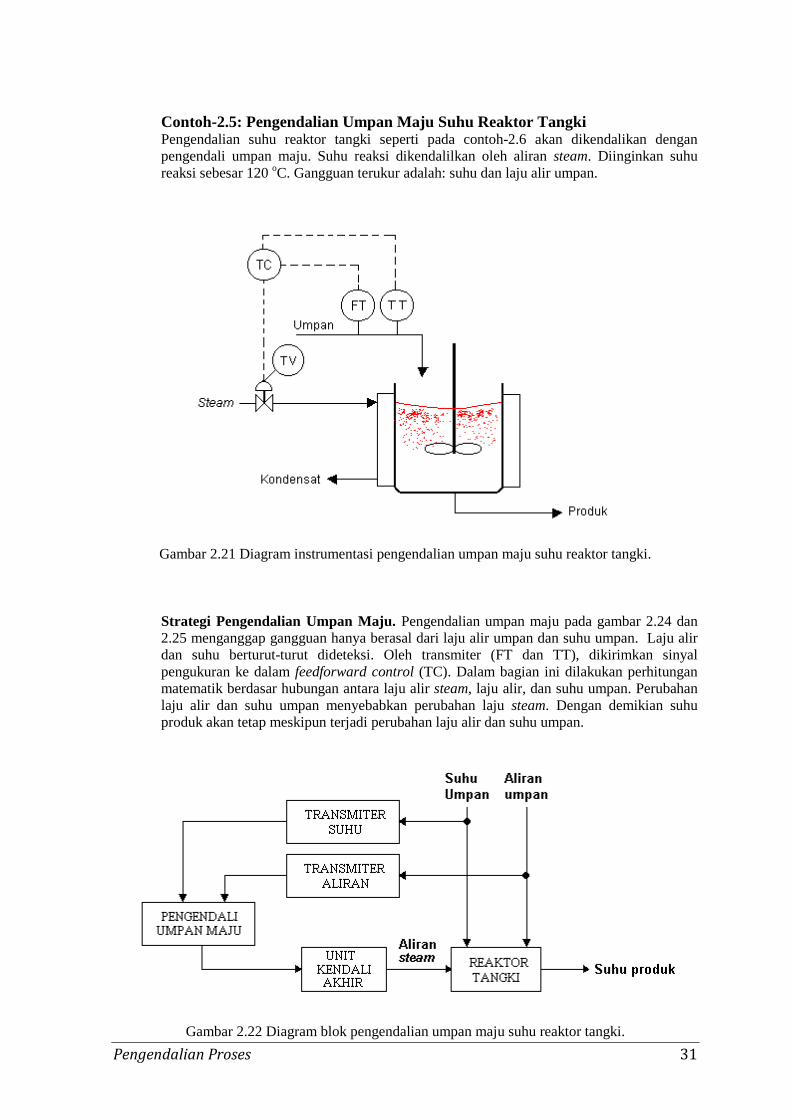
Contoh-2.5: Pengendalian Umpan Maju Suhu Reaktor Tangki Pengendalian suhu reaktor tangki seperti pada contoh-2.6 akan dikendalikan dengan pengendali umpan maju. Suhu reaksi dikendalilkan oleh aliran steam. Diinginkan suhu reaksi sebesar 120 oC. Gangguan terukur adalah: suhu dan laju alir umpan.
Gambar 2.21 Diagram instrumentasi pengendalian umpan maju suhu reaktor tangki. Strategi Pengendalian Umpan Maju. Pengendalian umpan maju pada gambar 2.24 dan 2.25 menganggap gangguan hanya berasal dari laju alir umpan dan suhu umpan. Laju alir dan suhu berturut-turut dideteksi. Oleh transmiter (FT dan TT), dikirimkan sinyal pengukuran ke dalam feedforward control (TC). Dalam bagian ini dilakukan perhitungan matematik berdasar hubungan antara laju alir steam, laju alir, dan suhu umpan. Perubahan laju alir dan suhu umpan menyebabkan perubahan laju steam. Dengan demikian suhu produk akan tetap meskipun terjadi perubahan laju alir dan suhu umpan.
Gambar 2.22 Diagram blok pengendalian umpan maju suhu reaktor tangki.
Pengendalian Proses 32
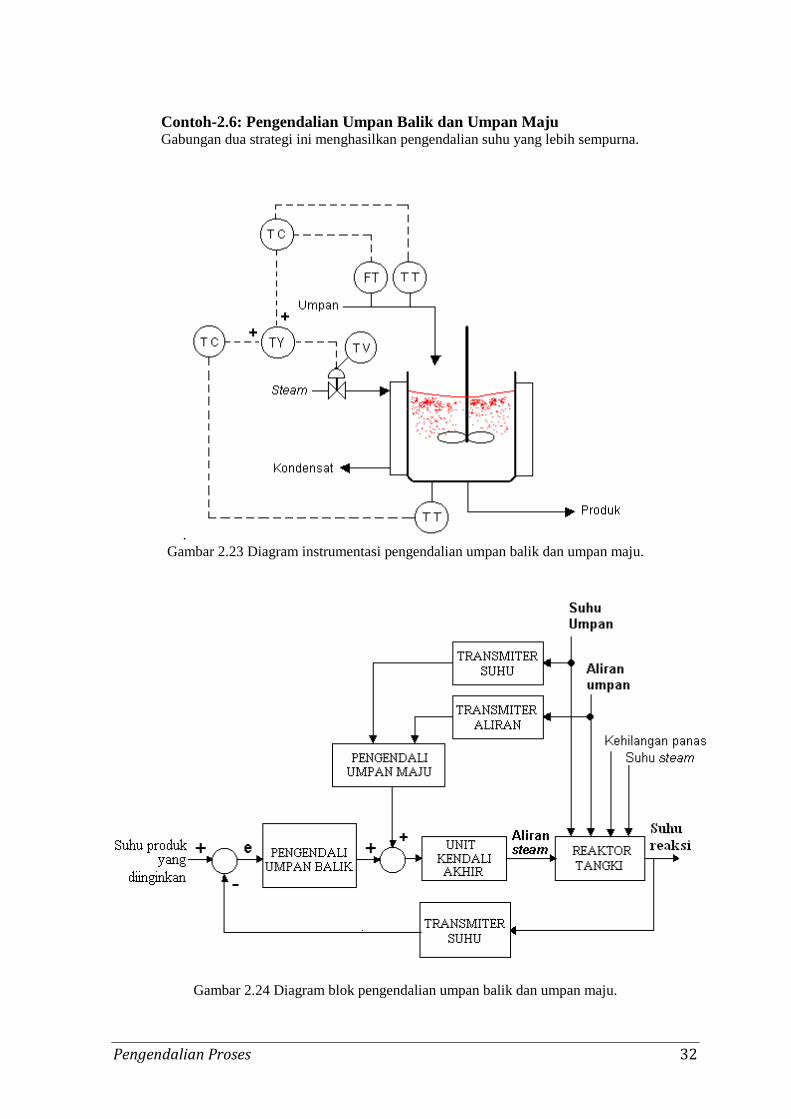
Contoh-2.6: Pengendalian Umpan Balik dan Umpan Maju Gabungan dua strategi ini menghasilkan pengendalian suhu yang lebih sempurna.
. Gambar 2.23 Diagram instrumentasi pengendalian umpan balik dan umpan maju.
Gambar 2.24 Diagram blok pengendalian umpan balik dan umpan maju.
Pengendalian Proses 33
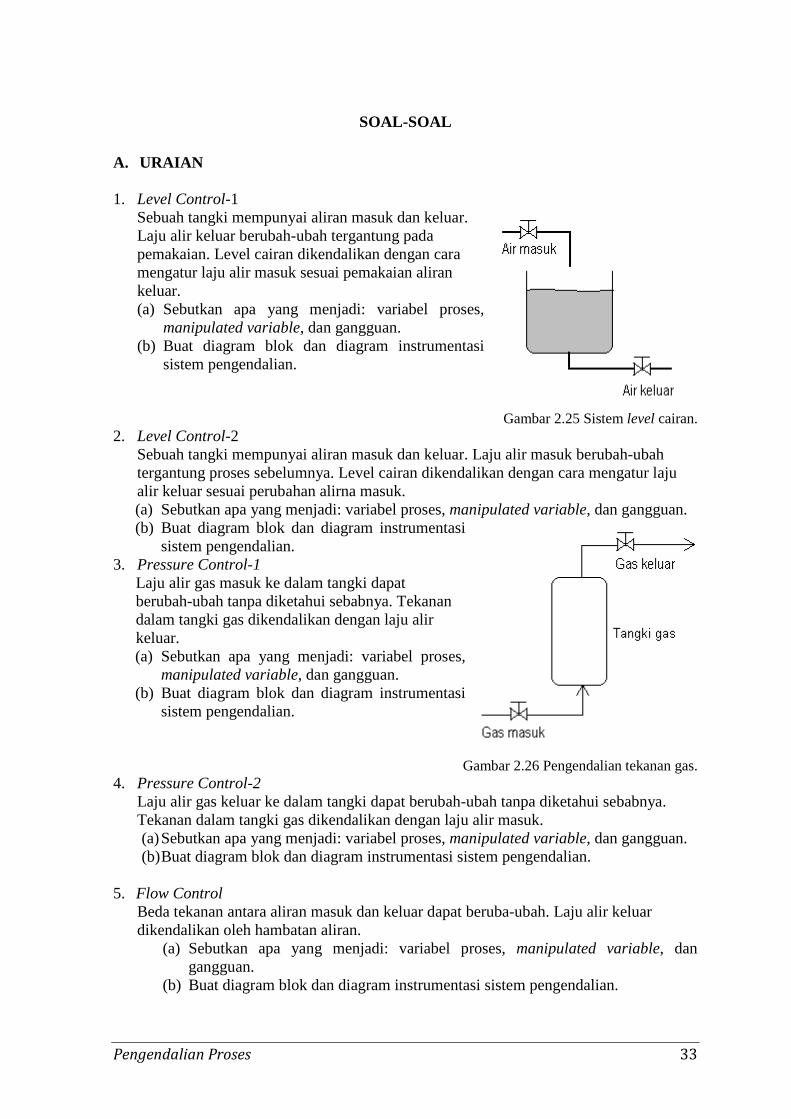
SOAL-SOAL A. URAIAN 1. Level Control-1
Sebuah tangki mempunyai aliran masuk dan keluar. Laju alir keluar berubah-ubah tergantung pada pemakaian. Level cairan dikendalikan dengan cara mengatur laju alir masuk sesuai pemakaian aliran keluar. (a) Sebutkan apa yang menjadi: variabel proses,
manipulated variable, dan gangguan. (b) Buat diagram blok dan diagram instrumentasi
sistem pengendalian.
Gambar 2.25 Sistem level cairan.
2. Level Control-2 Sebuah tangki mempunyai aliran masuk dan keluar. Laju alir masuk berubah-ubah tergantung proses sebelumnya. Level cairan dikendalikan dengan cara mengatur laju alir keluar sesuai perubahan alirna masuk. (a) Sebutkan apa yang menjadi: variabel proses, manipulated variable, dan gangguan. (b) Buat diagram blok dan diagram instrumentasi
sistem pengendalian. 3. Pressure Control-1
Laju alir gas masuk ke dalam tangki dapat berubah-ubah tanpa diketahui sebabnya. Tekanan dalam tangki gas dikendalikan dengan laju alir keluar. (a) Sebutkan apa yang menjadi: variabel proses,
manipulated variable, dan gangguan. (b) Buat diagram blok dan diagram instrumentasi
sistem pengendalian.
Gambar 2.26 Pengendalian tekanan gas.
4. Pressure Control-2 Laju alir gas keluar ke dalam tangki dapat berubah-ubah tanpa diketahui sebabnya. Tekanan dalam tangki gas dikendalikan dengan laju alir masuk. (a) Sebutkan apa yang menjadi: variabel proses, manipulated variable, dan gangguan. (b) Buat diagram blok dan diagram instrumentasi sistem pengendalian.
5. Flow Control
Beda tekanan antara aliran masuk dan keluar dapat beruba-ubah. Laju alir keluar dikendalikan oleh hambatan aliran.
(a) Sebutkan apa yang menjadi: variabel proses, manipulated variable, dan gangguan.
(b) Buat diagram blok dan diagram instrumentasi sistem pengendalian.
Pengendalian Proses 34
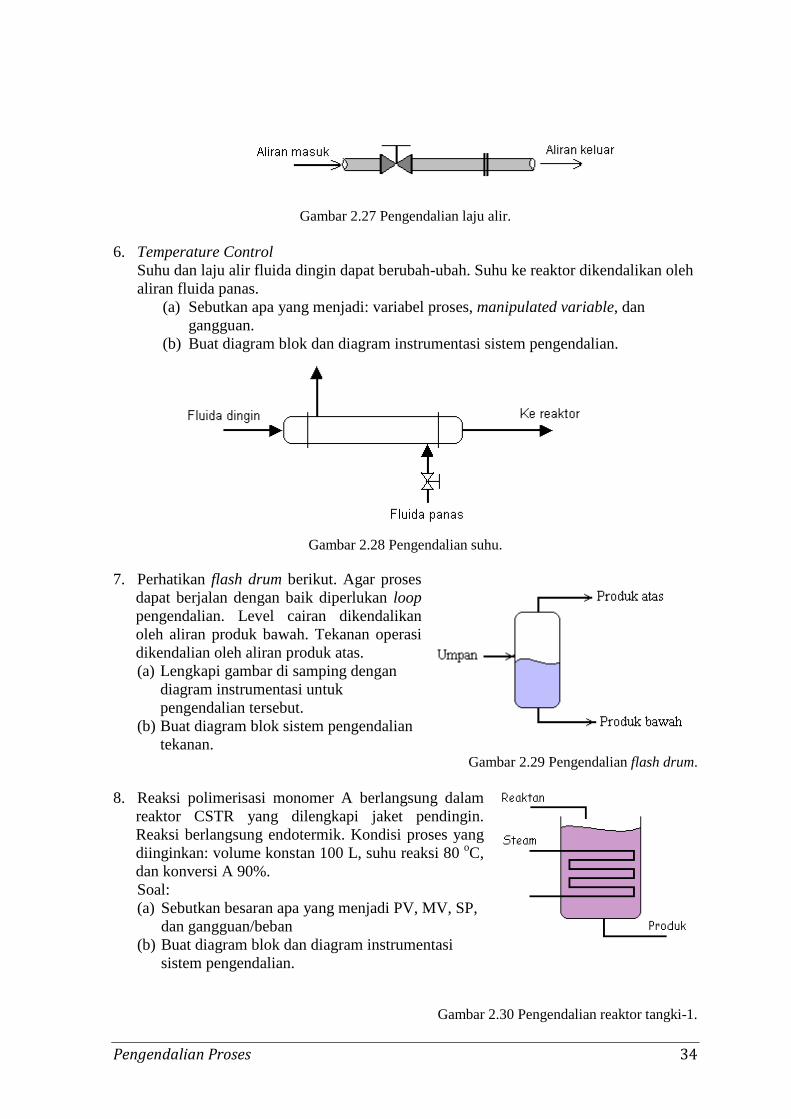
Gambar 2.27 Pengendalian laju alir.
6. Temperature Control
Suhu dan laju alir fluida dingin dapat berubah-ubah. Suhu ke reaktor dikendalikan oleh aliran fluida panas.
(a) Sebutkan apa yang menjadi: variabel proses, manipulated variable, dan gangguan.
(b) Buat diagram blok dan diagram instrumentasi sistem pengendalian.
Gambar 2.28 Pengendalian suhu.
7. Perhatikan flash drum berikut. Agar proses dapat berjalan dengan baik diperlukan loop pengendalian. Level cairan dikendalikan oleh aliran produk bawah. Tekanan operasi dikendalian oleh aliran produk atas. (a) Lengkapi gambar di samping dengan
diagram instrumentasi untuk pengendalian tersebut.
(b) Buat diagram blok sistem pengendalian tekanan.
Gambar 2.29 Pengendalian flash drum. 8. Reaksi polimerisasi monomer A berlangsung dalam
reaktor CSTR yang dilengkapi jaket pendingin. Reaksi berlangsung endotermik. Kondisi proses yang diinginkan: volume konstan 100 L, suhu reaksi 80 oC, dan konversi A 90%. Soal: (a) Sebutkan besaran apa yang menjadi PV, MV, SP,
dan gangguan/beban (b) Buat diagram blok dan diagram instrumentasi
sistem pengendalian.
Gambar 2.30 Pengendalian reaktor tangki-1.
Pengendalian Proses 35
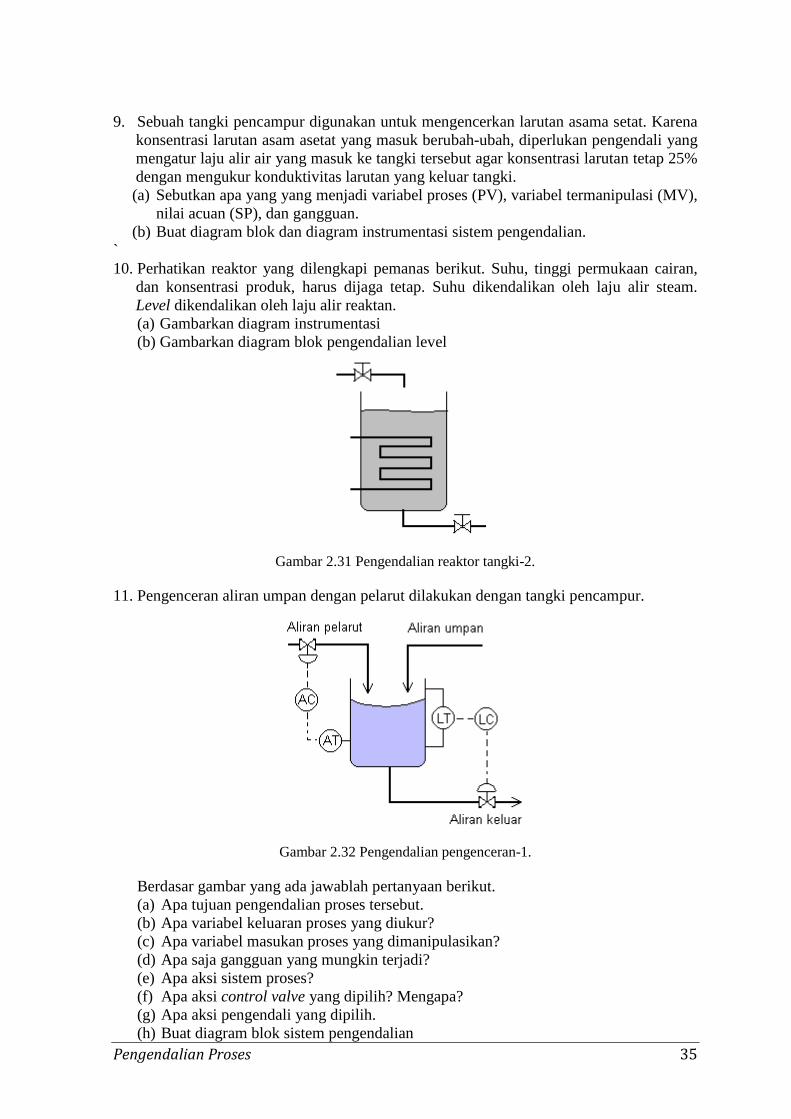
9. Sebuah tangki pencampur digunakan untuk mengencerkan larutan asama setat. Karena konsentrasi larutan asam asetat yang masuk berubah-ubah, diperlukan pengendali yang mengatur laju alir air yang masuk ke tangki tersebut agar konsentrasi larutan tetap 25% dengan mengukur konduktivitas larutan yang keluar tangki. (a) Sebutkan apa yang yang menjadi variabel proses (PV), variabel termanipulasi (MV),
nilai acuan (SP), dan gangguan. (b) Buat diagram blok dan diagram instrumentasi sistem pengendalian.
` 10. Perhatikan reaktor yang dilengkapi pemanas berikut. Suhu, tinggi permukaan cairan,
dan konsentrasi produk, harus dijaga tetap. Suhu dikendalikan oleh laju alir steam. Level dikendalikan oleh laju alir reaktan. (a) Gambarkan diagram instrumentasi (b) Gambarkan diagram blok pengendalian level
Gambar 2.31 Pengendalian reaktor tangki-2. 11. Pengenceran aliran umpan dengan pelarut dilakukan dengan tangki pencampur.
Gambar 2.32 Pengendalian pengenceran-1. Berdasar gambar yang ada jawablah pertanyaan berikut.
(a) Apa tujuan pengendalian proses tersebut. (b) Apa variabel keluaran proses yang diukur? (c) Apa variabel masukan proses yang dimanipulasikan? (d) Apa saja gangguan yang mungkin terjadi? (e) Apa aksi sistem proses? (f) Apa aksi control valve yang dipilih? Mengapa? (g) Apa aksi pengendali yang dipilih. (h) Buat diagram blok sistem pengendalian
Pengendalian Proses 36
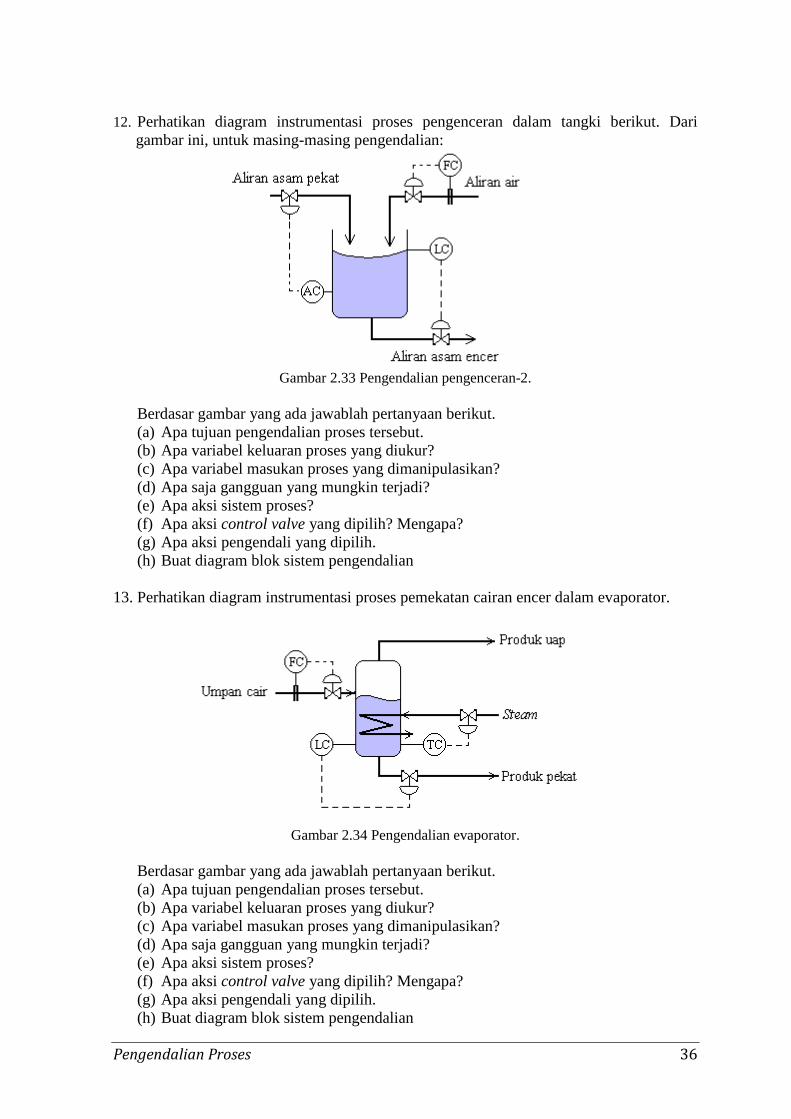
12. Perhatikan diagram instrumentasi proses pengenceran dalam tangki berikut. Dari gambar ini, untuk masing-masing pengendalian:
Gambar 2.33 Pengendalian pengenceran-2. Berdasar gambar yang ada jawablah pertanyaan berikut.
(a) Apa tujuan pengendalian proses tersebut. (b) Apa variabel keluaran proses yang diukur? (c) Apa variabel masukan proses yang dimanipulasikan? (d) Apa saja gangguan yang mungkin terjadi? (e) Apa aksi sistem proses? (f) Apa aksi control valve yang dipilih? Mengapa? (g) Apa aksi pengendali yang dipilih. (h) Buat diagram blok sistem pengendalian
13. Perhatikan diagram instrumentasi proses pemekatan cairan encer dalam evaporator.
Gambar 2.34 Pengendalian evaporator. Berdasar gambar yang ada jawablah pertanyaan berikut.
(a) Apa tujuan pengendalian proses tersebut. (b) Apa variabel keluaran proses yang diukur? (c) Apa variabel masukan proses yang dimanipulasikan? (d) Apa saja gangguan yang mungkin terjadi? (e) Apa aksi sistem proses? (f) Apa aksi control valve yang dipilih? Mengapa? (g) Apa aksi pengendali yang dipilih. (h) Buat diagram blok sistem pengendalian
Pengendalian Proses 37
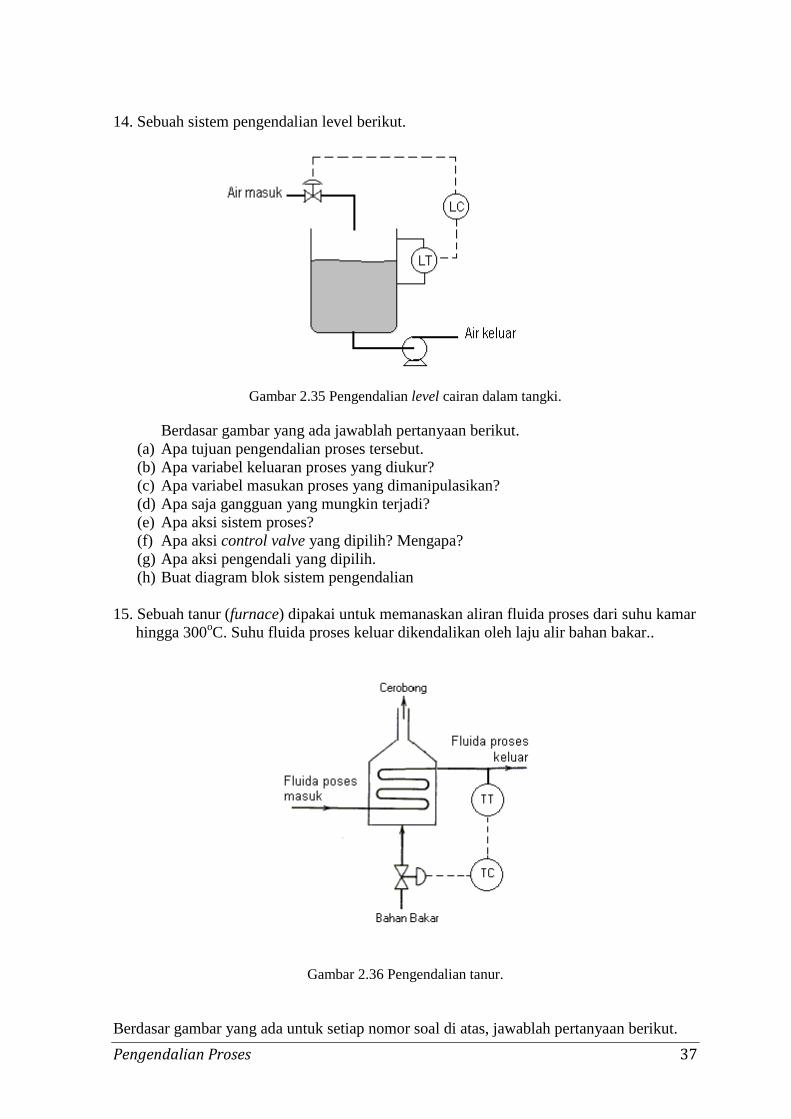
14. Sebuah sistem pengendalian level berikut.
Gambar 2.35 Pengendalian level cairan dalam tangki.
Berdasar gambar yang ada jawablah pertanyaan berikut. (a) Apa tujuan pengendalian proses tersebut. (b) Apa variabel keluaran proses yang diukur? (c) Apa variabel masukan proses yang dimanipulasikan? (d) Apa saja gangguan yang mungkin terjadi? (e) Apa aksi sistem proses? (f) Apa aksi control valve yang dipilih? Mengapa? (g) Apa aksi pengendali yang dipilih. (h) Buat diagram blok sistem pengendalian
15. Sebuah tanur (furnace) dipakai untuk memanaskan aliran fluida proses dari suhu kamar
hingga 300oC. Suhu fluida proses keluar dikendalikan oleh laju alir bahan bakar..
Gambar 2.36 Pengendalian tanur. Berdasar gambar yang ada untuk setiap nomor soal di atas, jawablah pertanyaan berikut.
Pengendalian Proses 38
(a) Apa tujuan pengendalian proses tersebut. (b) Apa variabel keluaran proses yang diukur? (c) Apa variabel masukan proses yang dimanipulasikan? (d) Apa saja gangguan yang mungkin terjadi? (e) Apa aksi sistem proses? (f) Apa aksi control valve yang dipilih? Mengapa? (g) Apa aksi pengendali yang dipilih? (h) Buat diagram blok sistem pengendalian
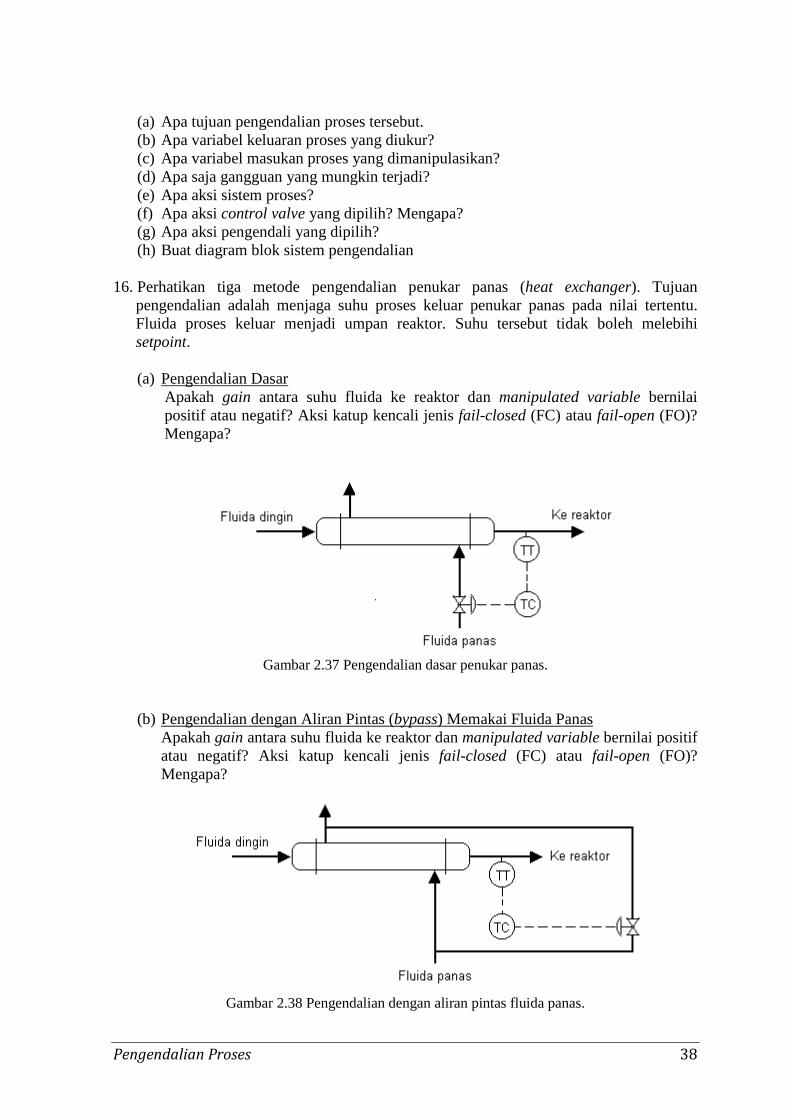
16. Perhatikan tiga metode pengendalian penukar panas (heat exchanger). Tujuan
pengendalian adalah menjaga suhu proses keluar penukar panas pada nilai tertentu. Fluida proses keluar menjadi umpan reaktor. Suhu tersebut tidak boleh melebihi setpoint. (a) Pengendalian Dasar
Apakah gain antara suhu fluida ke reaktor dan manipulated variable bernilai positif atau negatif? Aksi katup kencali jenis fail-closed (FC) atau fail-open (FO)? Mengapa?
Gambar 2.37 Pengendalian dasar penukar panas.
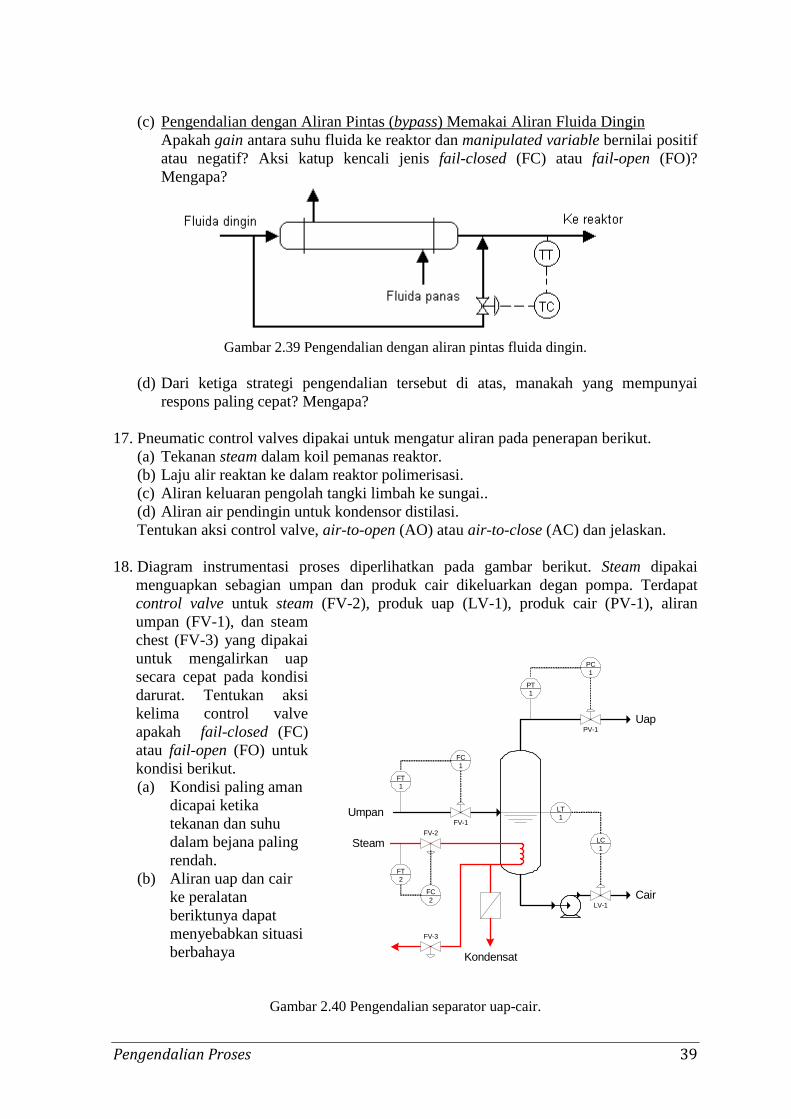
(b) Pengendalian dengan Aliran Pintas (bypass) Memakai Fluida Panas
Apakah gain antara suhu fluida ke reaktor dan manipulated variable bernilai positif atau negatif? Aksi katup kencali jenis fail-closed (FC) atau fail-open (FO)? Mengapa?
Gambar 2.38 Pengendalian dengan aliran pintas fluida panas.
Pengendalian Proses 39
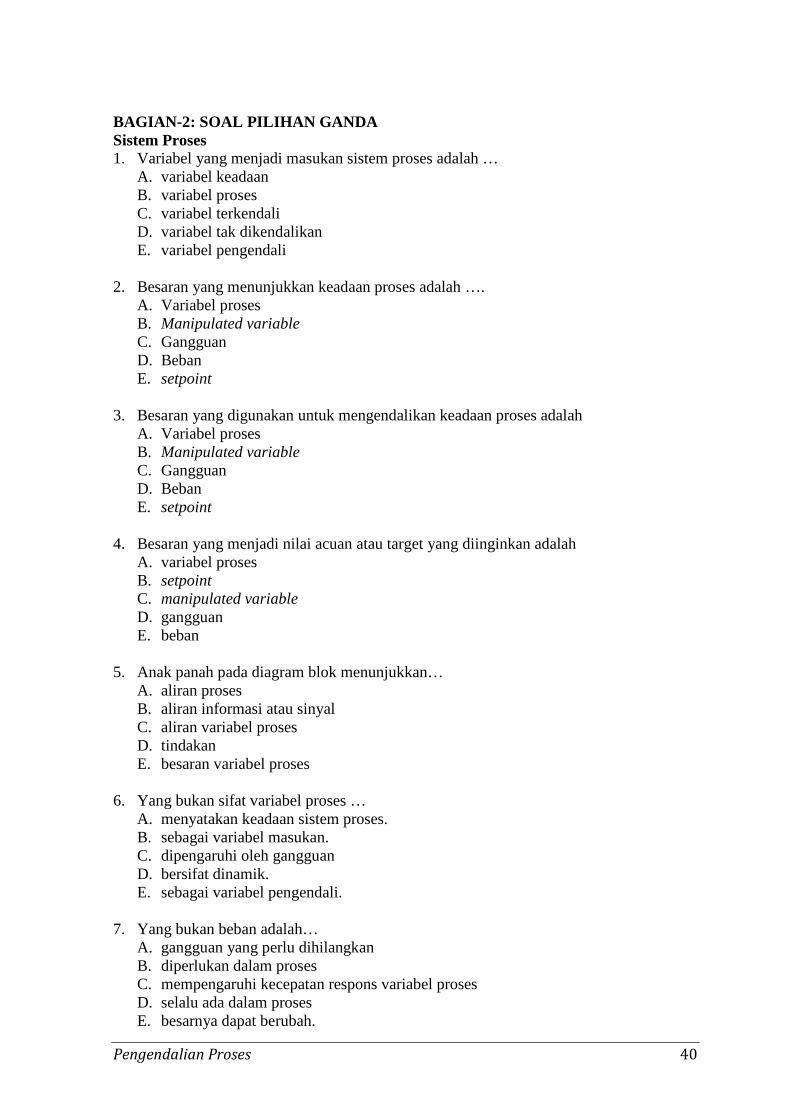
(c) Pengendalian dengan Aliran Pintas (bypass) Memakai Aliran Fluida Dingin Apakah gain antara suhu fluida ke reaktor dan manipulated variable bernilai positif atau negatif? Aksi katup kencali jenis fail-closed (FC) atau fail-open (FO)? Mengapa?
Gambar 2.39 Pengendalian dengan aliran pintas fluida dingin.
(d) Dari ketiga strategi pengendalian tersebut di atas, manakah yang mempunyai
respons paling cepat? Mengapa?
17. Pneumatic control valves dipakai untuk mengatur aliran pada penerapan berikut. (a) Tekanan steam dalam koil pemanas reaktor. (b) Laju alir reaktan ke dalam reaktor polimerisasi. (c) Aliran keluaran pengolah tangki limbah ke sungai.. (d) Aliran air pendingin untuk kondensor distilasi. Tentukan aksi control valve, air-to-open (AO) atau air-to-close (AC) dan jelaskan.
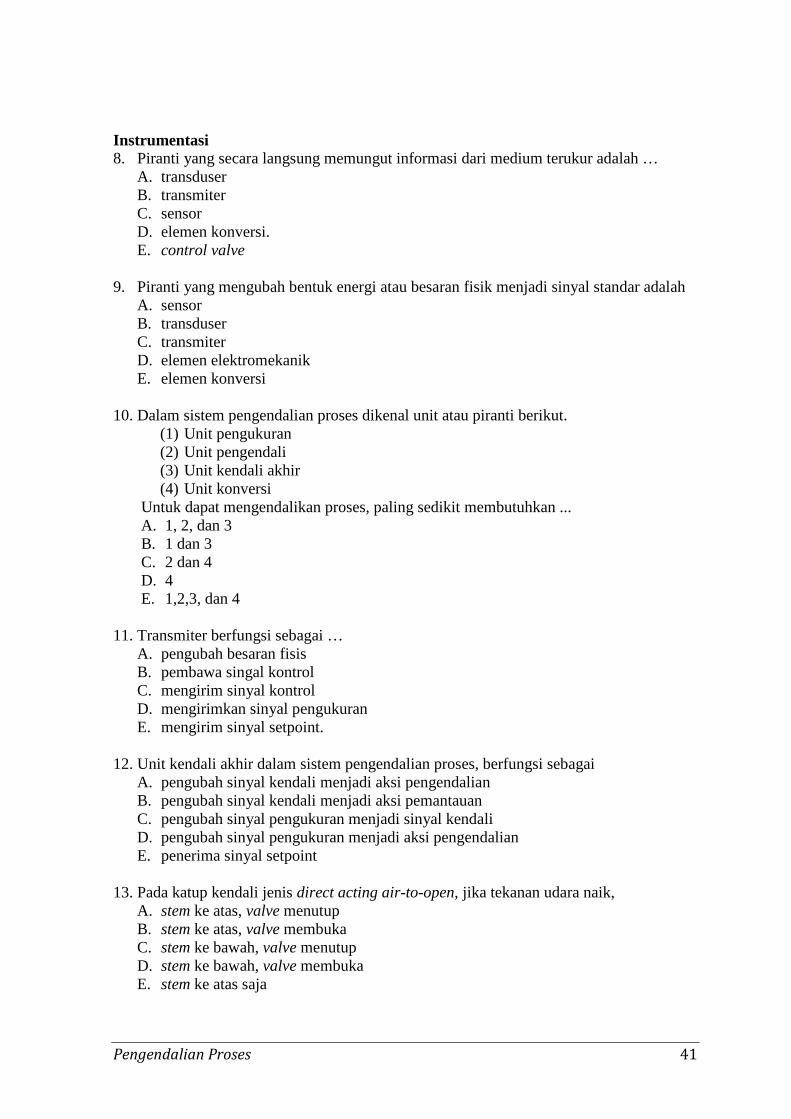
18. Diagram instrumentasi proses diperlihatkan pada gambar berikut. Steam dipakai menguapkan sebagian umpan dan produk cair dikeluarkan degan pompa. Terdapat control valve untuk steam (FV-2), produk uap (LV-1), produk cair (PV-1), aliran umpan (FV-1), dan steam chest (FV-3) yang dipakai untuk mengalirkan uap secara cepat pada kondisi darurat. Tentukan aksi kelima control valve apakah fail-closed (FC) atau fail-open (FO) untuk kondisi berikut. (a) Kondisi paling aman
dicapai ketika tekanan dan suhu dalam bejana paling rendah.
(b) Aliran uap dan cair ke peralatan beriktunya dapat menyebabkan situasi berbahaya
Gambar 2.40 Pengendalian separator uap-cair.
FV-1
FT1
FC1
FV-2
FT2
FC2
FV-3
LV-1
LT1
LC1
PV-1
PT1
PC1
Kondensat
Steam
Umpan
Uap
Cair
Pengendalian Proses 40
BAGIAN-2: SOAL PILIHAN GANDA Sistem Proses 1. Variabel yang menjadi masukan sistem proses adalah …
A. variabel keadaan B. variabel proses C. variabel terkendali D. variabel tak dikendalikan E. variabel pengendali
2. Besaran yang menunjukkan keadaan proses adalah ….
A. Variabel proses B. Manipulated variable C. Gangguan D. Beban E. setpoint
3. Besaran yang digunakan untuk mengendalikan keadaan proses adalah
A. Variabel proses B. Manipulated variable C. Gangguan D. Beban E. setpoint
4. Besaran yang menjadi nilai acuan atau target yang diinginkan adalah A. variabel proses B. setpoint C. manipulated variable D. gangguan E. beban
5. Anak panah pada diagram blok menunjukkan… A. aliran proses B. aliran informasi atau sinyal C. aliran variabel proses D. tindakan E. besaran variabel proses
6. Yang bukan sifat variabel proses …
A. menyatakan keadaan sistem proses. B. sebagai variabel masukan. C. dipengaruhi oleh gangguan D. bersifat dinamik. E. sebagai variabel pengendali.
7. Yang bukan beban adalah… A. gangguan yang perlu dihilangkan B. diperlukan dalam proses C. mempengaruhi kecepatan respons variabel proses D. selalu ada dalam proses E. besarnya dapat berubah.
Pengendalian Proses 41
Instrumentasi 8. Piranti yang secara langsung memungut informasi dari medium terukur adalah …
A. transduser B. transmiter C. sensor D. elemen konversi. E. control valve
9. Piranti yang mengubah bentuk energi atau besaran fisik menjadi sinyal standar adalah
A. sensor B. transduser C. transmiter D. elemen elektromekanik E. elemen konversi
10. Dalam sistem pengendalian proses dikenal unit atau piranti berikut.
(1) Unit pengukuran (2) Unit pengendali (3) Unit kendali akhir (4) Unit konversi
Untuk dapat mengendalikan proses, paling sedikit membutuhkan ... A. 1, 2, dan 3 B. 1 dan 3 C. 2 dan 4 D. 4 E. 1,2,3, dan 4
11. Transmiter berfungsi sebagai …
A. pengubah besaran fisis B. pembawa singal kontrol C. mengirim sinyal kontrol D. mengirimkan sinyal pengukuran E. mengirim sinyal setpoint.
12. Unit kendali akhir dalam sistem pengendalian proses, berfungsi sebagai
A. pengubah sinyal kendali menjadi aksi pengendalian B. pengubah sinyal kendali menjadi aksi pemantauan C. pengubah sinyal pengukuran menjadi sinyal kendali D. pengubah sinyal pengukuran menjadi aksi pengendalian E. penerima sinyal setpoint
13. Pada katup kendali jenis direct acting air-to-open, jika tekanan udara naik,
A. stem ke atas, valve menutup B. stem ke atas, valve membuka C. stem ke bawah, valve menutup D. stem ke bawah, valve membuka E. stem ke atas saja
Pengendalian Proses 42
14. Jika pasokan tekanan udara hilang, maka plug dari control valve jenis air-to-close akan A. membuka B. menutup C. setengah membuka D. membuka lantas menutup E. tak terpengaruh
15. Jika stem pada katup kendali bergerak ke atas maka... A. katup membuka. B. katup menutup. C. bersifat fail closed D. bersifat fail open E. bersifat air-to-open
16. Arti istilah direct-acting pada pengendali, adalah bila …
A. PV naik, MV turun B. PV turun, MV turun C. PV naik, SP naik D. PV naik, SP turun E. SP naik, MV turun
17. Pengendalian tinggi permukaan cairan memakai aliran keluar sebagai variabel
pengendali. Maka aksi pengendali dan katup kendali berturut-turut adalah … A. direct acting dan FO B. direct acting dan FC C. reverse acting dan FO D. reverse acting dan FO atau FC E. reverse acting dan FC
18. Tampilan manipulated variable terbaca 60%. Ini berarti bukaan katup sebesar … A. 40% B. 40% untuk aksi reverse acting C. 60% D. 60% untuk aksi reverse acting E. tergantung nilai variabel proses
Pengendalian Umpan Balik 19. Pengendalian proses pada dasarnya adalah bertujuan untuk menjaga variabel
A. keadaan proses. B. setpoint C. gangguan D. beban E. pengendali
20. Ciri utama pengendalian umpan balik
A. adanya offset B. setpoint tetap C. adanya umpan balik negatif D. adanya error E. adanya osilasi kontinyu
Pengendalian Proses 43
21. Pengendalian suhu minyak dengan penukar panas memakai air panas sebagai pemanas. Suhu minyak keluar dikendalikan oleh laju air panas yang masuk. Maka … A. beban adalah laju alir minyak B. setpoint adalah suhu minyak panas C. gangguan adalah laju alir air panas D. variabel proses adalah suhu air panas E. error adalah beda antara suhu minyak keluar dan suhu air panas masuk
22. Dari langkah berikut:
1. mengevaluasi 2. mengoreksi 3. mengukur 4. membandingkan
Urutan langkah pengendalian umpan balik adalah… A. 1, 2, 3, 4 B. 2, 1, 3, 4 C. 3, 2, 1, 4 D. 3, 4, 1, 2 E. 4, 3, 1, 2
23. Besaran yang dikendalikan disebut... A. process variable. B. manipulated variable. C. disturbance. D. load. E. Setpoint
24. Langkah terpenting pada pengendalian
A. mengukur dan membandingkan B. mengukur C. membandingkan D. mengevaluasi E. mengoreksi
25. Ciri pengendalian umpan balik… A. aksi koreksi bergantung perubahan variabel terkendali B. sinyal error selalu negatif C. setpoint selalu tetap D. terdapat offset bila terjadi perubahan beban E. selalu tak stabilan.
26. Kelebihan pengendalian umpan balik adalah sebagai berikut, kecuali ...
A. dapat mengantisipasi gangguan yang tak terukur B. tidak perlu mengetahui perilaku sistem proses secara tepat. C. bersifat tegar (robust) yaitu tahan terhadap perubahan perilaku sistem proses. D. tindakan koreksi terjadi sebelum PV berubah. E. dapat mengantisipasi perubahan beban yang tak terukur
Pengendalian Proses 44
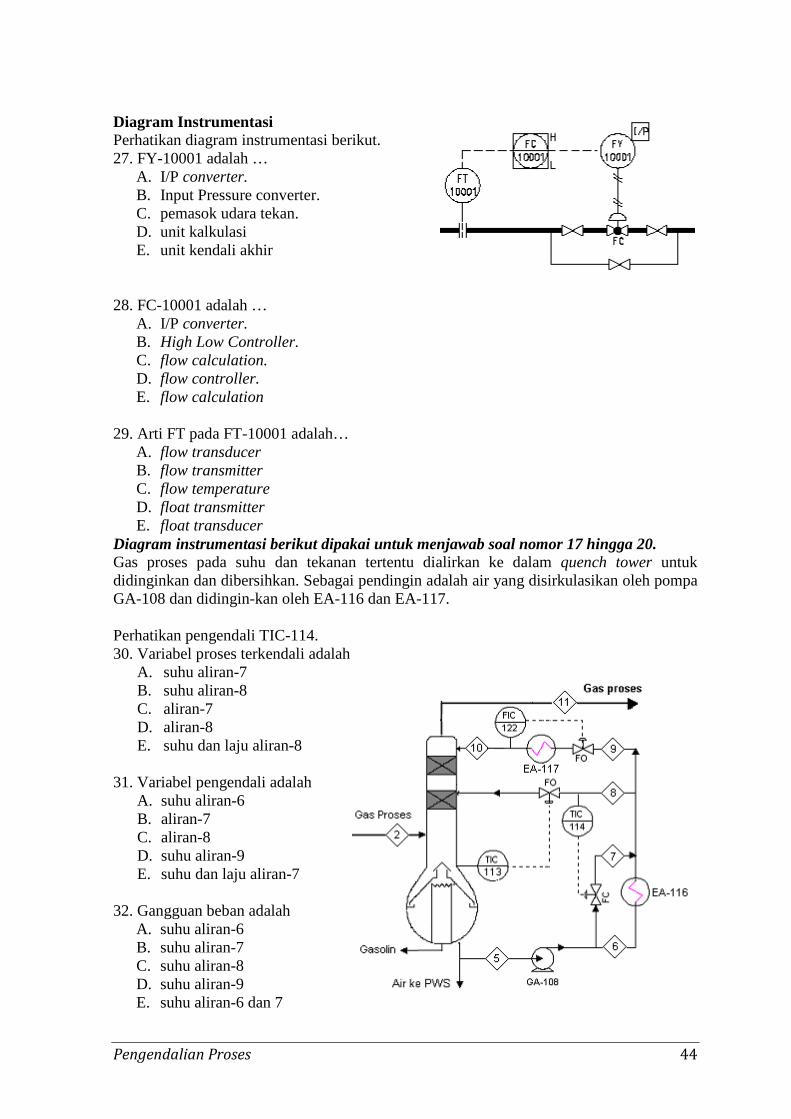
Diagram Instrumentasi Perhatikan diagram instrumentasi berikut. 27. FY-10001 adalah …
A. I/P converter. B. Input Pressure converter. C. pemasok udara tekan. D. unit kalkulasi E. unit kendali akhir
28. FC-10001 adalah …
A. I/P converter. B. High Low Controller. C. flow calculation. D. flow controller. E. flow calculation
29. Arti FT pada FT-10001 adalah… A. flow transducer B. flow transmitter C. flow temperature D. float transmitter E. float transducer
Diagram instrumentasi berikut dipakai untuk menjawab soal nomor 17 hingga 20. Gas proses pada suhu dan tekanan tertentu dialirkan ke dalam quench tower untuk didinginkan dan dibersihkan. Sebagai pendingin adalah air yang disirkulasikan oleh pompa GA-108 dan didingin-kan oleh EA-116 dan EA-117. Perhatikan pengendali TIC-114. 30. Variabel proses terkendali adalah
A. suhu aliran-7 B. suhu aliran-8 C. aliran-7 D. aliran-8 E. suhu dan laju aliran-8
31. Variabel pengendali adalah A. suhu aliran-6 B. aliran-7 C. aliran-8 D. suhu aliran-9 E. suhu dan laju aliran-7
32. Gangguan beban adalah
A. suhu aliran-6 B. suhu aliran-7 C. suhu aliran-8 D. suhu aliran-9 E. suhu aliran-6 dan 7

Pengendalian Proses 45
33. Aksi plant & pengendali berturut-turut A. reverse acting dan direct acting B. reverse acting dan reverse acting C. direct acting dan reverse acting D. direct acting dan direct acting E. bukan salah satu di atas
34. Jika suhu aliran-8 terlalu tinggi, maka A. Bukaan control valve bertambah B. Bukaan control valve berkurang C. Aliran-6 berkurang D. Aliran-7 bertambah E. Aliran-8 bertambah
Pengendalian Proses 46
BAB-3 KARAKTERISTIK SISTEM PROSES
TUJUAN PEMBELAJARAN UMUM Memahami karakteristik sistem proses untuk digunakan dalam menentukan parameter pengendali yang sesuai. TUJUAN PEMBELAJARAN KHUSUS Setelah menyelesaikan bab ini, mahasiswa diharapkan dapat: 1) Dapat menentukan karakteristik statik. 2) Dapat membuat sketsa grafik respons step. 3) Dapat mengidentifikasi persamaan matematik sistem. 4) Dapat menentukan gain dan konstanta waktu sistem orde-1. 5) Dapat menentukan aksi integral dalam proses. 6) Dapat menentukan gain, waktu mati dalam proses aliran cair dan padat. 7) Dapat menentukan gain, konstanta waktu dan waktu mati dari sketsa respons langkah. 8) Dapat menentukan apakah proses sukar, sedang, atau mudah dikendalikan dari bentuk
respons langkahnya. 9) Dapat menerangkan sistem nonlinier dan salah satu metode linierisasi di lapangan.
Pengendalian Proses 47
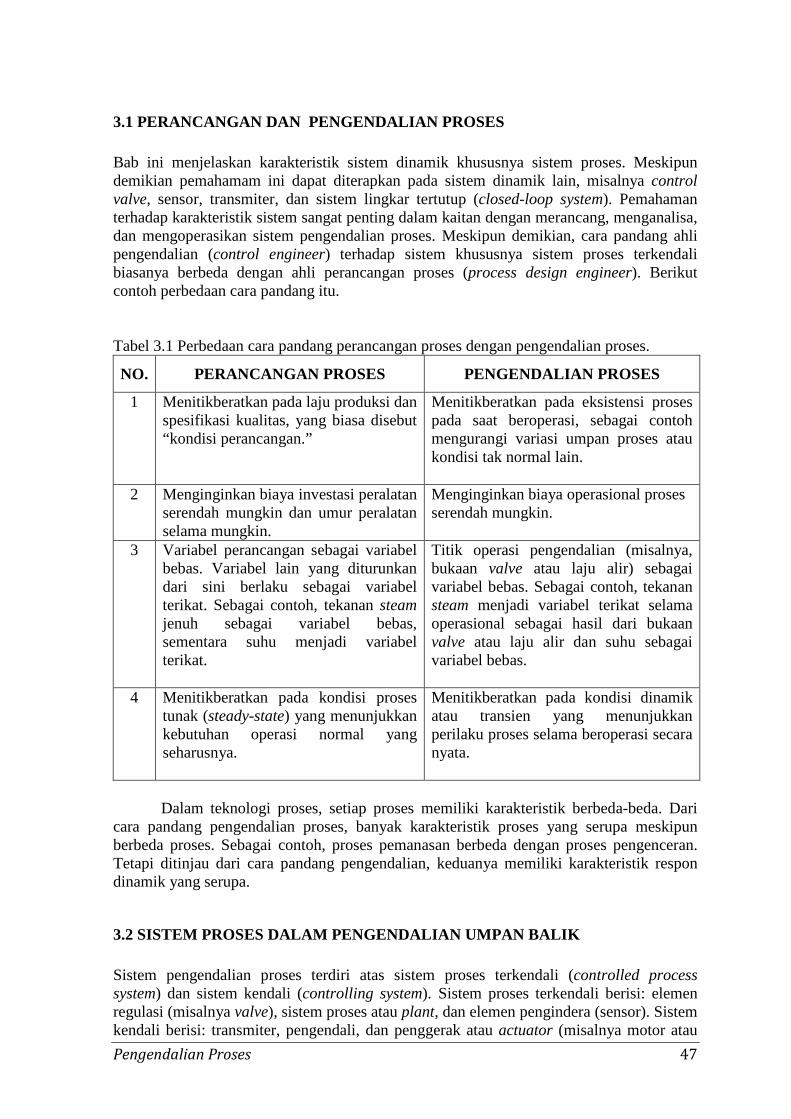
3.1 PERANCANGAN DAN PENGENDALIAN PROSES Bab ini menjelaskan karakteristik sistem dinamik khususnya sistem proses. Meskipun demikian pemahamam ini dapat diterapkan pada sistem dinamik lain, misalnya control valve, sensor, transmiter, dan sistem lingkar tertutup (closed-loop system). Pemahaman terhadap karakteristik sistem sangat penting dalam kaitan dengan merancang, menganalisa, dan mengoperasikan sistem pengendalian proses. Meskipun demikian, cara pandang ahli pengendalian (control engineer) terhadap sistem khususnya sistem proses terkendali biasanya berbeda dengan ahli perancangan proses (process design engineer). Berikut contoh perbedaan cara pandang itu. Tabel 3.1 Perbedaan cara pandang perancangan proses dengan pengendalian proses.
NO. PERANCANGAN PROSES PENGENDALIAN PROSES
1 Menitikberatkan pada laju produksi dan spesifikasi kualitas, yang biasa disebut “kondisi perancangan.”
Menitikberatkan pada eksistensi proses pada saat beroperasi, sebagai contoh mengurangi variasi umpan proses atau kondisi tak normal lain.
2 Menginginkan biaya investasi peralatan serendah mungkin dan umur peralatan selama mungkin.
Menginginkan biaya operasional proses serendah mungkin.
3 Variabel perancangan sebagai variabel bebas. Variabel lain yang diturunkan dari sini berlaku sebagai variabel terikat. Sebagai contoh, tekanan steam jenuh sebagai variabel bebas, sementara suhu menjadi variabel terikat.
Titik operasi pengendalian (misalnya, bukaan valve atau laju alir) sebagai variabel bebas. Sebagai contoh, tekanan steam menjadi variabel terikat selama operasional sebagai hasil dari bukaan valve atau laju alir dan suhu sebagai variabel bebas.
4 Menitikberatkan pada kondisi proses tunak (steady-state) yang menunjukkan kebutuhan operasi normal yang seharusnya.
Menitikberatkan pada kondisi dinamik atau transien yang menunjukkan perilaku proses selama beroperasi secara nyata.
Dalam teknologi proses, setiap proses memiliki karakteristik berbeda-beda. Dari
cara pandang pengendalian proses, banyak karakteristik proses yang serupa meskipun berbeda proses. Sebagai contoh, proses pemanasan berbeda dengan proses pengenceran. Tetapi ditinjau dari cara pandang pengendalian, keduanya memiliki karakteristik respon dinamik yang serupa.
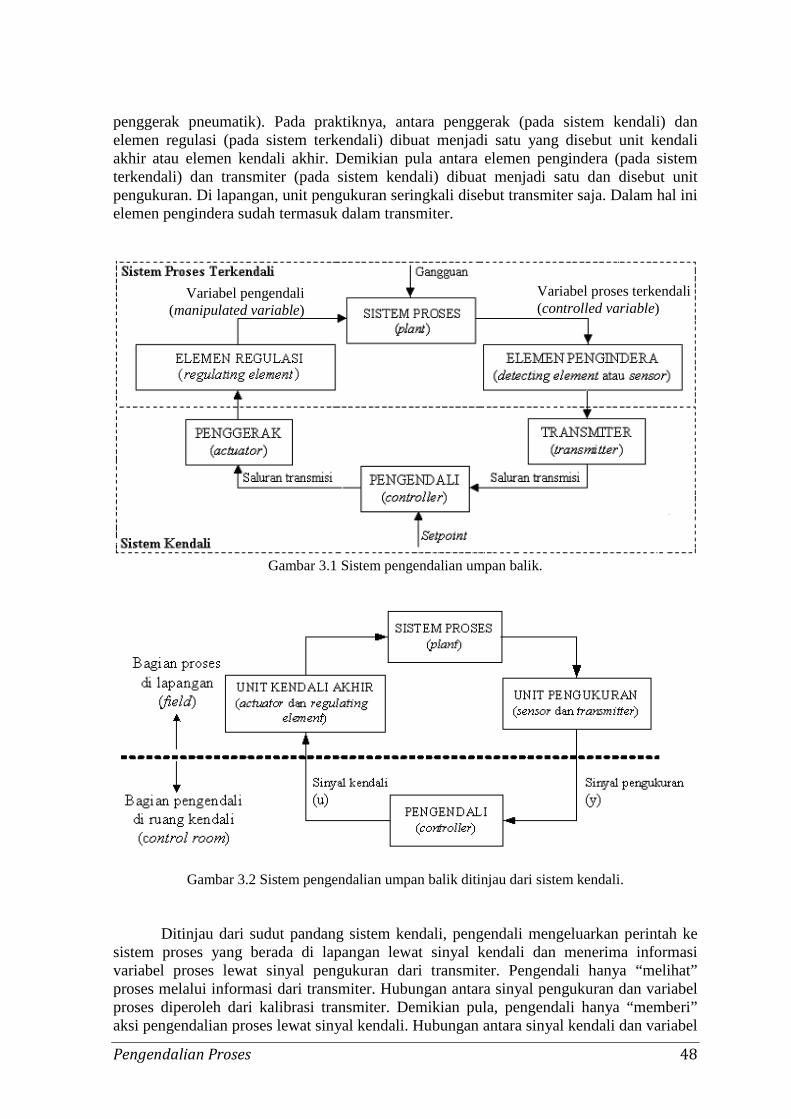
3.2 SISTEM PROSES DALAM PENGENDALIAN UMPAN BALIK Sistem pengendalian proses terdiri atas sistem proses terkendali (controlled process system) dan sistem kendali (controlling system). Sistem proses terkendali berisi: elemen regulasi (misalnya valve), sistem proses atau plant, dan elemen pengindera (sensor). Sistem kendali berisi: transmiter, pengendali, dan penggerak atau actuator (misalnya motor atau
Pengendalian Proses 48
penggerak pneumatik). Pada praktiknya, antara penggerak (pada sistem kendali) dan elemen regulasi (pada sistem terkendali) dibuat menjadi satu yang disebut unit kendali akhir atau elemen kendali akhir. Demikian pula antara elemen pengindera (pada sistem terkendali) dan transmiter (pada sistem kendali) dibuat menjadi satu dan disebut unit pengukuran. Di lapangan, unit pengukuran seringkali disebut transmiter saja. Dalam hal ini elemen pengindera sudah termasuk dalam transmiter.
Gambar 3.1 Sistem pengendalian umpan balik.
Gambar 3.2 Sistem pengendalian umpan balik ditinjau dari sistem kendali.
Ditinjau dari sudut pandang sistem kendali, pengendali mengeluarkan perintah ke sistem proses yang berada di lapangan lewat sinyal kendali dan menerima informasi variabel proses lewat sinyal pengukuran dari transmiter. Pengendali hanya “melihat” proses melalui informasi dari transmiter. Hubungan antara sinyal pengukuran dan variabel proses diperoleh dari kalibrasi transmiter. Demikian pula, pengendali hanya “memberi” aksi pengendalian proses lewat sinyal kendali. Hubungan antara sinyal kendali dan variabel
Variabel proses terkendali (controlled variable)
Variabel pengendali (manipulated variable)
Pengendalian Proses 49
pengendali diperoleh dari kalibrasi elemen kendali akhir. Dengan demikian, dari sisi pengendali, sistem proses hanya dilihat sebagai hubungan antara masukan proses (sinyal kendali, u) dan keluaran proses (sinyal pengukuran, y).
3.2 SEKILAS RESPON PROSES
Bentuk respon keluaran y(t) akan berbeda tergantung masukan u(t). Untuk selanjutnya, jika tidak disebutkan secara khusus, dianggap respon step. Perubahan masukan dalam bentuk fungsi step.
>∀
<∀=
0
00
)(
tA
t
tu (3.1)
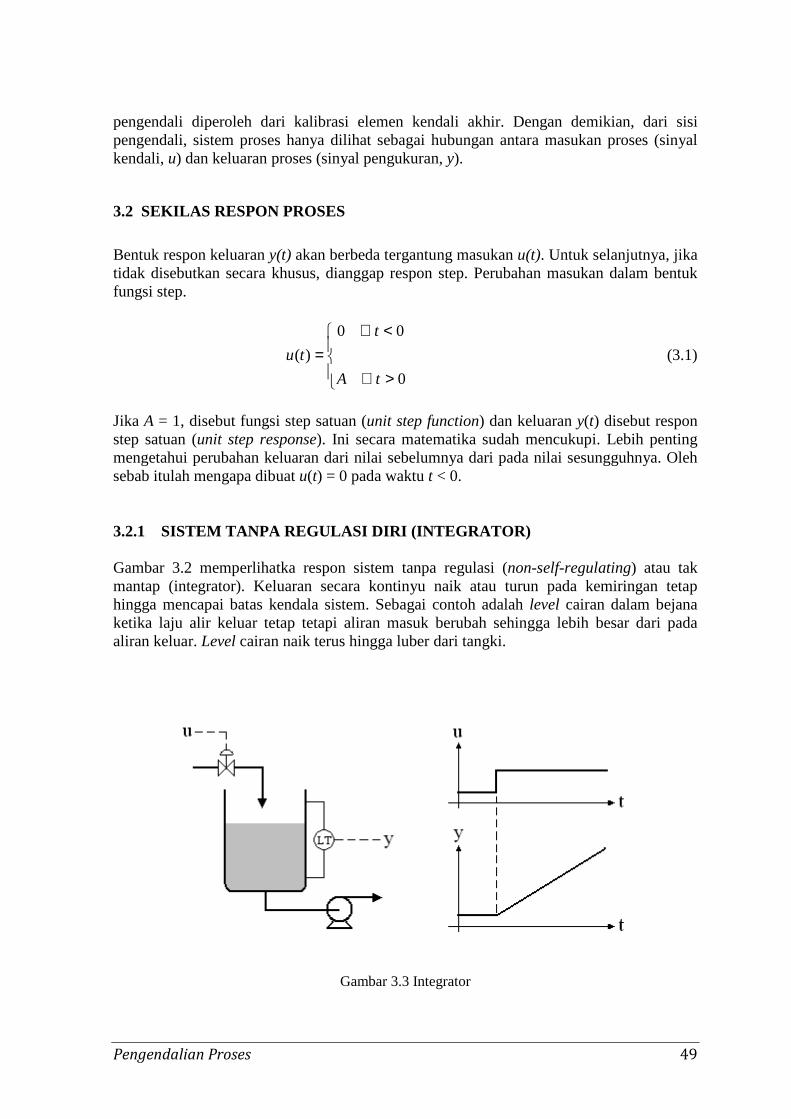
Jika A = 1, disebut fungsi step satuan (unit step function) dan keluaran y(t) disebut respon step satuan (unit step response). Ini secara matematika sudah mencukupi. Lebih penting mengetahui perubahan keluaran dari nilai sebelumnya dari pada nilai sesungguhnya. Oleh sebab itulah mengapa dibuat u(t) = 0 pada waktu t < 0. 3.2.1 SISTEM TANPA REGULASI DIRI (INTEGRATOR) Gambar 3.2 memperlihatka respon sistem tanpa regulasi (non-self-regulating) atau tak mantap (integrator). Keluaran secara kontinyu naik atau turun pada kemiringan tetap hingga mencapai batas kendala sistem. Sebagai contoh adalah level cairan dalam bejana ketika laju alir keluar tetap tetapi aliran masuk berubah sehingga lebih besar dari pada aliran keluar. Level cairan naik terus hingga luber dari tangki.
Gambar 3.3 Integrator
Pengendalian Proses 50
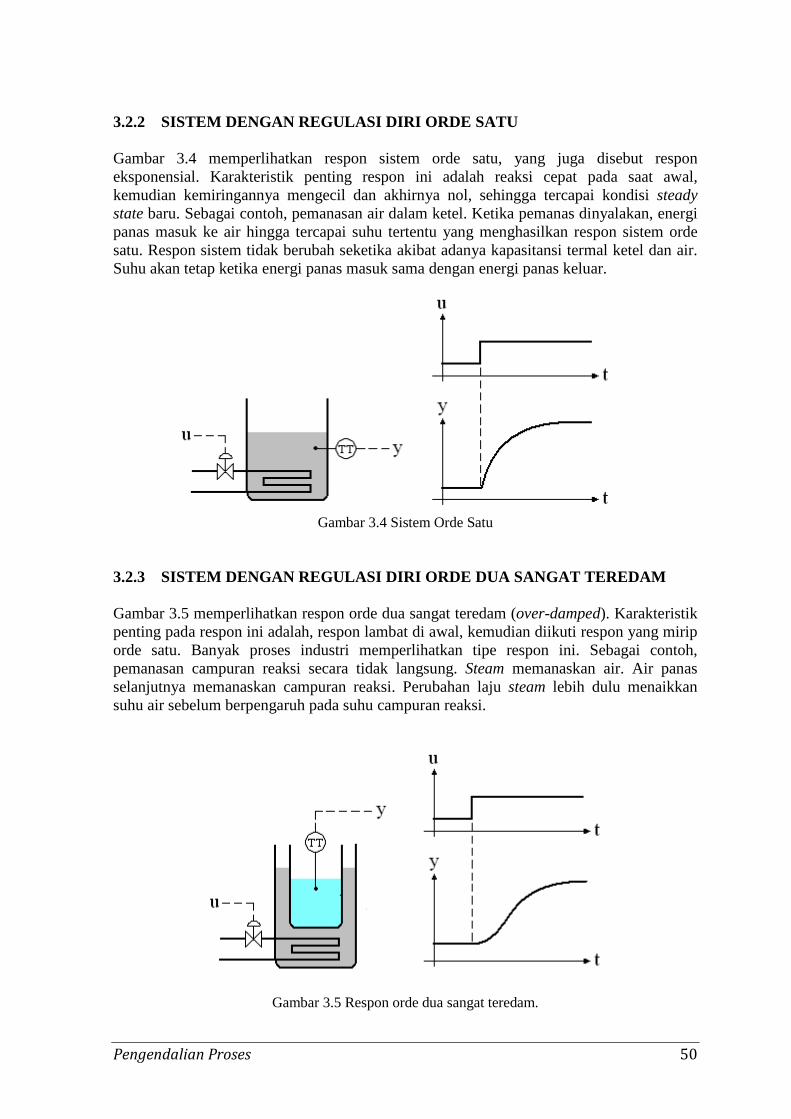
3.2.2 SISTEM DENGAN REGULASI DIRI ORDE SATU Gambar 3.4 memperlihatkan respon sistem orde satu, yang juga disebut respon eksponensial. Karakteristik penting respon ini adalah reaksi cepat pada saat awal, kemudian kemiringannya mengecil dan akhirnya nol, sehingga tercapai kondisi steady state baru. Sebagai contoh, pemanasan air dalam ketel. Ketika pemanas dinyalakan, energi panas masuk ke air hingga tercapai suhu tertentu yang menghasilkan respon sistem orde satu. Respon sistem tidak berubah seketika akibat adanya kapasitansi termal ketel dan air. Suhu akan tetap ketika energi panas masuk sama dengan energi panas keluar.
Gambar 3.4 Sistem Orde Satu
3.2.3 SISTEM DENGAN REGULASI DIRI ORDE DUA SANGAT TEREDAM Gambar 3.5 memperlihatkan respon orde dua sangat teredam (over-damped). Karakteristik penting pada respon ini adalah, respon lambat di awal, kemudian diikuti respon yang mirip orde satu. Banyak proses industri memperlihatkan tipe respon ini. Sebagai contoh, pemanasan campuran reaksi secara tidak langsung. Steam memanaskan air. Air panas selanjutnya memanaskan campuran reaksi. Perubahan laju steam lebih dulu menaikkan suhu air sebelum berpengaruh pada suhu campuran reaksi.
Gambar 3.5 Respon orde dua sangat teredam.
Pengendalian Proses 51
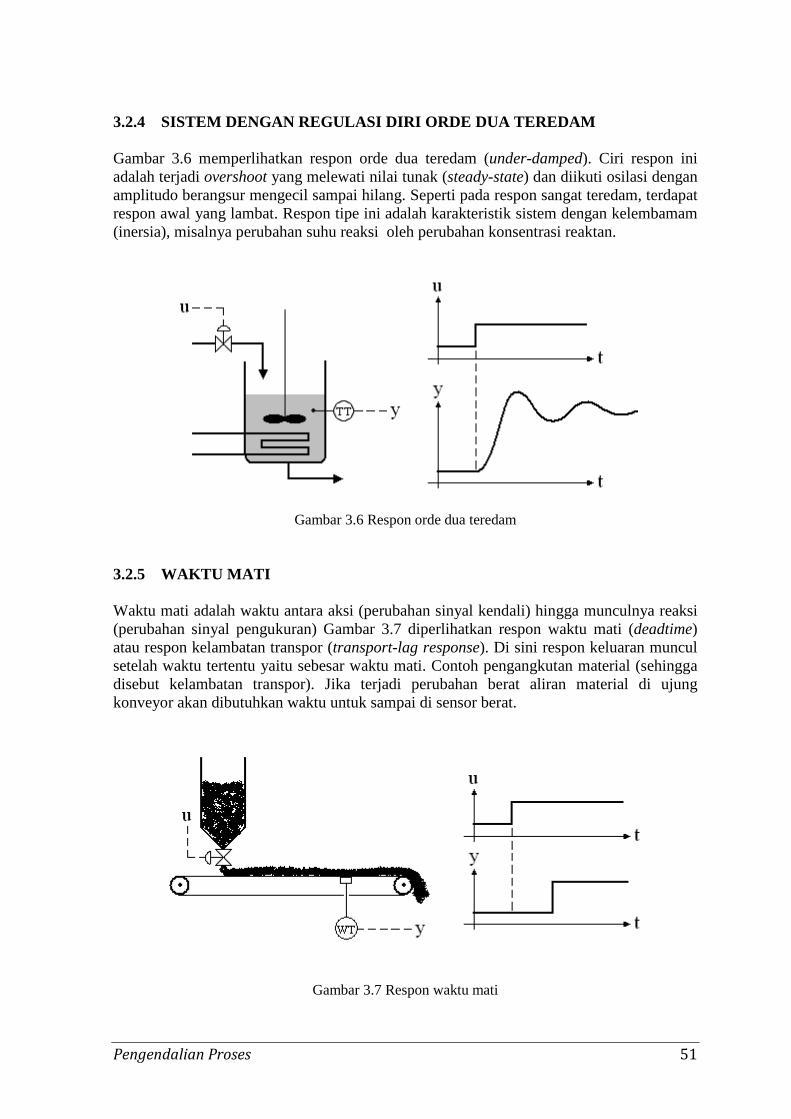
3.2.4 SISTEM DENGAN REGULASI DIRI ORDE DUA TEREDAM Gambar 3.6 memperlihatkan respon orde dua teredam (under-damped). Ciri respon ini adalah terjadi overshoot yang melewati nilai tunak (steady-state) dan diikuti osilasi dengan amplitudo berangsur mengecil sampai hilang. Seperti pada respon sangat teredam, terdapat respon awal yang lambat. Respon tipe ini adalah karakteristik sistem dengan kelembamam (inersia), misalnya perubahan suhu reaksi oleh perubahan konsentrasi reaktan.
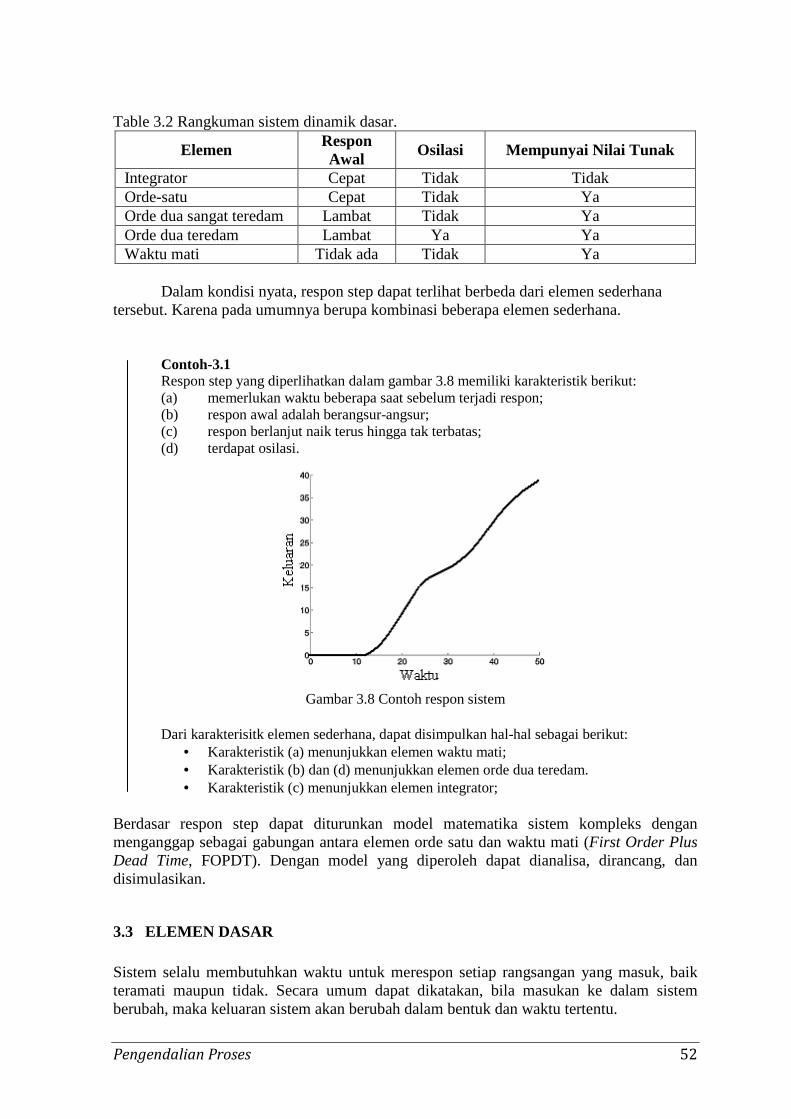
Gambar 3.6 Respon orde dua teredam 3.2.5 WAKTU MATI Waktu mati adalah waktu antara aksi (perubahan sinyal kendali) hingga munculnya reaksi (perubahan sinyal pengukuran) Gambar 3.7 diperlihatkan respon waktu mati (deadtime) atau respon kelambatan transpor (transport-lag response). Di sini respon keluaran muncul setelah waktu tertentu yaitu sebesar waktu mati. Contoh pengangkutan material (sehingga disebut kelambatan transpor). Jika terjadi perubahan berat aliran material di ujung konveyor akan dibutuhkan waktu untuk sampai di sensor berat.
Gambar 3.7 Respon waktu mati
Pengendalian Proses 52
Table 3.2 Rangkuman sistem dinamik dasar.
Elemen Respon Awal
Osilasi Mempunyai Nilai Tunak
Integrator Cepat Tidak Tidak Orde-satu Cepat Tidak Ya Orde dua sangat teredam Lambat Tidak Ya Orde dua teredam Lambat Ya Ya Waktu mati Tidak ada Tidak Ya
Dalam kondisi nyata, respon step dapat terlihat berbeda dari elemen sederhana
tersebut. Karena pada umumnya berupa kombinasi beberapa elemen sederhana.
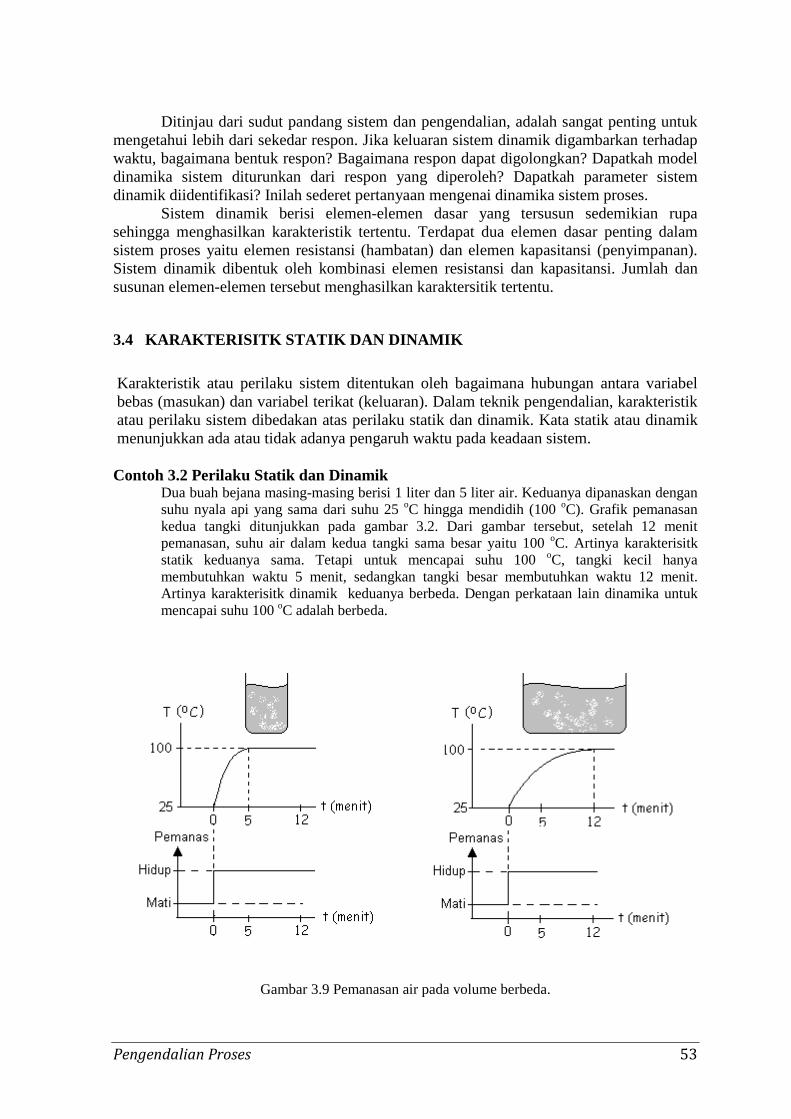
Contoh-3.1 Respon step yang diperlihatkan dalam gambar 3.8 memiliki karakteristik berikut: (a) memerlukan waktu beberapa saat sebelum terjadi respon; (b) respon awal adalah berangsur-angsur; (c) respon berlanjut naik terus hingga tak terbatas; (d) terdapat osilasi.
Gambar 3.8 Contoh respon sistem
Dari karakterisitk elemen sederhana, dapat disimpulkan hal-hal sebagai berikut: • Karakteristik (a) menunjukkan elemen waktu mati; • Karakteristik (b) dan (d) menunjukkan elemen orde dua teredam. • Karakteristik (c) menunjukkan elemen integrator;
Berdasar respon step dapat diturunkan model matematika sistem kompleks dengan menganggap sebagai gabungan antara elemen orde satu dan waktu mati (First Order Plus Dead Time, FOPDT). Dengan model yang diperoleh dapat dianalisa, dirancang, dan disimulasikan.
3.3 ELEMEN DASAR Sistem selalu membutuhkan waktu untuk merespon setiap rangsangan yang masuk, baik teramati maupun tidak. Secara umum dapat dikatakan, bila masukan ke dalam sistem berubah, maka keluaran sistem akan berubah dalam bentuk dan waktu tertentu.
Pengendalian Proses 53
Ditinjau dari sudut pandang sistem dan pengendalian, adalah sangat penting untuk mengetahui lebih dari sekedar respon. Jika keluaran sistem dinamik digambarkan terhadap waktu, bagaimana bentuk respon? Bagaimana respon dapat digolongkan? Dapatkah model dinamika sistem diturunkan dari respon yang diperoleh? Dapatkah parameter sistem dinamik diidentifikasi? Inilah sederet pertanyaan mengenai dinamika sistem proses.
Sistem dinamik berisi elemen-elemen dasar yang tersusun sedemikian rupa sehingga menghasilkan karakteristik tertentu. Terdapat dua elemen dasar penting dalam sistem proses yaitu elemen resistansi (hambatan) dan elemen kapasitansi (penyimpanan). Sistem dinamik dibentuk oleh kombinasi elemen resistansi dan kapasitansi. Jumlah dan susunan elemen-elemen tersebut menghasilkan karaktersitik tertentu.
3.4 KARAKTERISITK STATIK DAN DINAMIK
Karakteristik atau perilaku sistem ditentukan oleh bagaimana hubungan antara variabel bebas (masukan) dan variabel terikat (keluaran). Dalam teknik pengendalian, karakteristik atau perilaku sistem dibedakan atas perilaku statik dan dinamik. Kata statik atau dinamik menunjukkan ada atau tidak adanya pengaruh waktu pada keadaan sistem. Contoh 3.2 Perilaku Statik dan Dinamik
Dua buah bejana masing-masing berisi 1 liter dan 5 liter air. Keduanya dipanaskan dengan suhu nyala api yang sama dari suhu 25 oC hingga mendidih (100 oC). Grafik pemanasan kedua tangki ditunjukkan pada gambar 3.2. Dari gambar tersebut, setelah 12 menit pemanasan, suhu air dalam kedua tangki sama besar yaitu 100 oC. Artinya karakterisitk statik keduanya sama. Tetapi untuk mencapai suhu 100 oC, tangki kecil hanya membutuhkan waktu 5 menit, sedangkan tangki besar membutuhkan waktu 12 menit. Artinya karakterisitk dinamik keduanya berbeda. Dengan perkataan lain dinamika untuk mencapai suhu 100 oC adalah berbeda.
Gambar 3.9 Pemanasan air pada volume berbeda.
Pengendalian Proses 54
3.4.1 KARAKTERISTIK STATIK Gain Proses. Karakteristik statik atau perilaku statik adalah perilaku sistem yang tidak dipengaruhi waktu. Secara numerik dinyatakan oleh steady-state gain atau static-gain (di kalangan praktisi disebut dengan process gain atau gain saja), yaitu perbandingan antara perubahan keluaran dan perubahan masukan setelah tercapai keadaan tunak (steady-statei). Dengan mengetahui karakteristik statik maka batas pengendalian dapat diketahui.
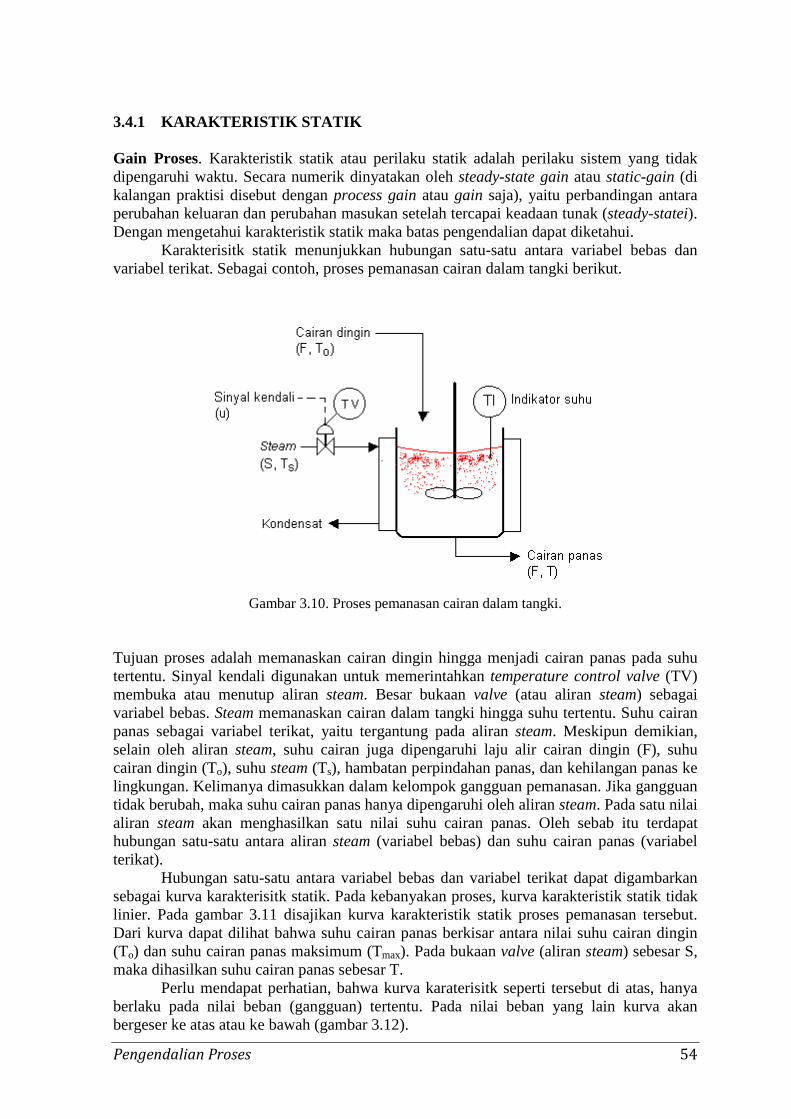
Karakterisitk statik menunjukkan hubungan satu-satu antara variabel bebas dan variabel terikat. Sebagai contoh, proses pemanasan cairan dalam tangki berikut.
Gambar 3.10. Proses pemanasan cairan dalam tangki.
Tujuan proses adalah memanaskan cairan dingin hingga menjadi cairan panas pada suhu tertentu. Sinyal kendali digunakan untuk memerintahkan temperature control valve (TV) membuka atau menutup aliran steam. Besar bukaan valve (atau aliran steam) sebagai variabel bebas. Steam memanaskan cairan dalam tangki hingga suhu tertentu. Suhu cairan panas sebagai variabel terikat, yaitu tergantung pada aliran steam. Meskipun demikian, selain oleh aliran steam, suhu cairan juga dipengaruhi laju alir cairan dingin (F), suhu cairan dingin (To), suhu steam (Ts), hambatan perpindahan panas, dan kehilangan panas ke lingkungan. Kelimanya dimasukkan dalam kelompok gangguan pemanasan. Jika gangguan tidak berubah, maka suhu cairan panas hanya dipengaruhi oleh aliran steam. Pada satu nilai aliran steam akan menghasilkan satu nilai suhu cairan panas. Oleh sebab itu terdapat hubungan satu-satu antara aliran steam (variabel bebas) dan suhu cairan panas (variabel terikat).
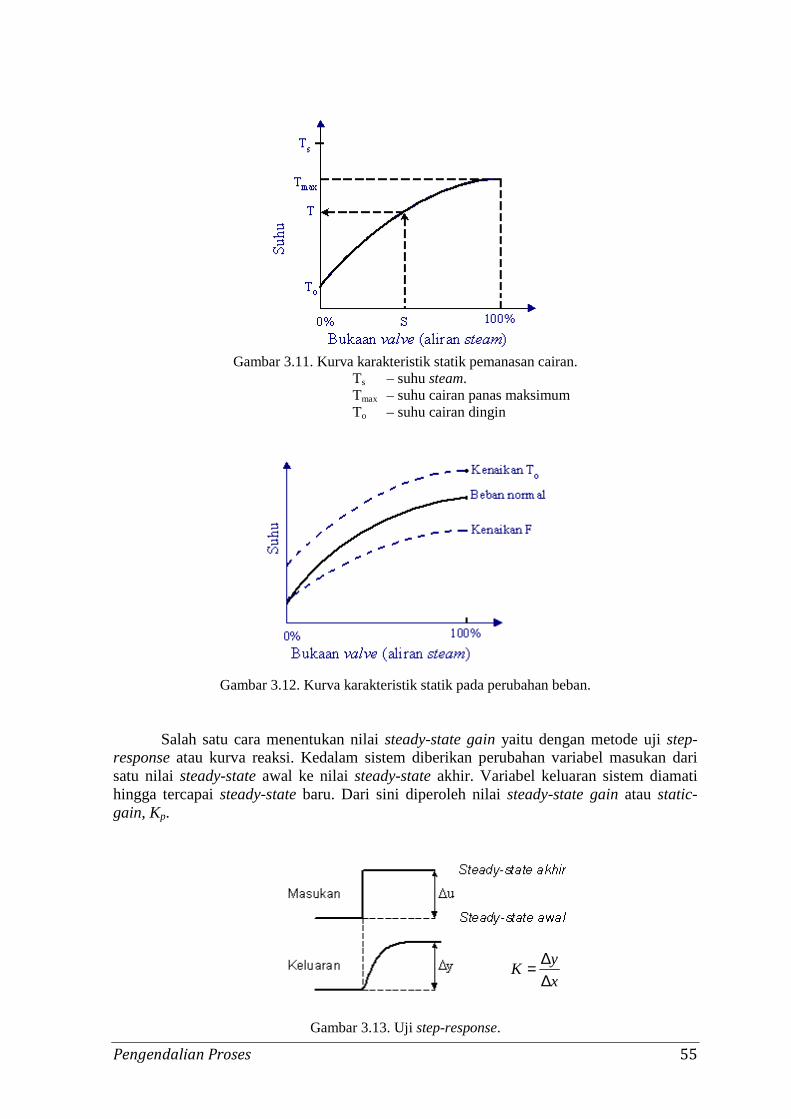
Hubungan satu-satu antara variabel bebas dan variabel terikat dapat digambarkan sebagai kurva karakterisitk statik. Pada kebanyakan proses, kurva karakteristik statik tidak linier. Pada gambar 3.11 disajikan kurva karakteristik statik proses pemanasan tersebut. Dari kurva dapat dilihat bahwa suhu cairan panas berkisar antara nilai suhu cairan dingin (To) dan suhu cairan panas maksimum (Tmax). Pada bukaan valve (aliran steam) sebesar S, maka dihasilkan suhu cairan panas sebesar T.
Perlu mendapat perhatian, bahwa kurva karaterisitk seperti tersebut di atas, hanya berlaku pada nilai beban (gangguan) tertentu. Pada nilai beban yang lain kurva akan bergeser ke atas atau ke bawah (gambar 3.12).
Pengendalian Proses 55
Gambar 3.11. Kurva karakteristik statik pemanasan cairan.
Ts – suhu steam. Tmax – suhu cairan panas maksimum To – suhu cairan dingin
Gambar 3.12. Kurva karakteristik statik pada perubahan beban.
Salah satu cara menentukan nilai steady-state gain yaitu dengan metode uji step-response atau kurva reaksi. Kedalam sistem diberikan perubahan variabel masukan dari satu nilai steady-state awal ke nilai steady-state akhir. Variabel keluaran sistem diamati hingga tercapai steady-state baru. Dari sini diperoleh nilai steady-state gain atau static-gain, Kp.
Gambar 3.13. Uji step-response.
x
yK
∆∆=
Pengendalian Proses 56
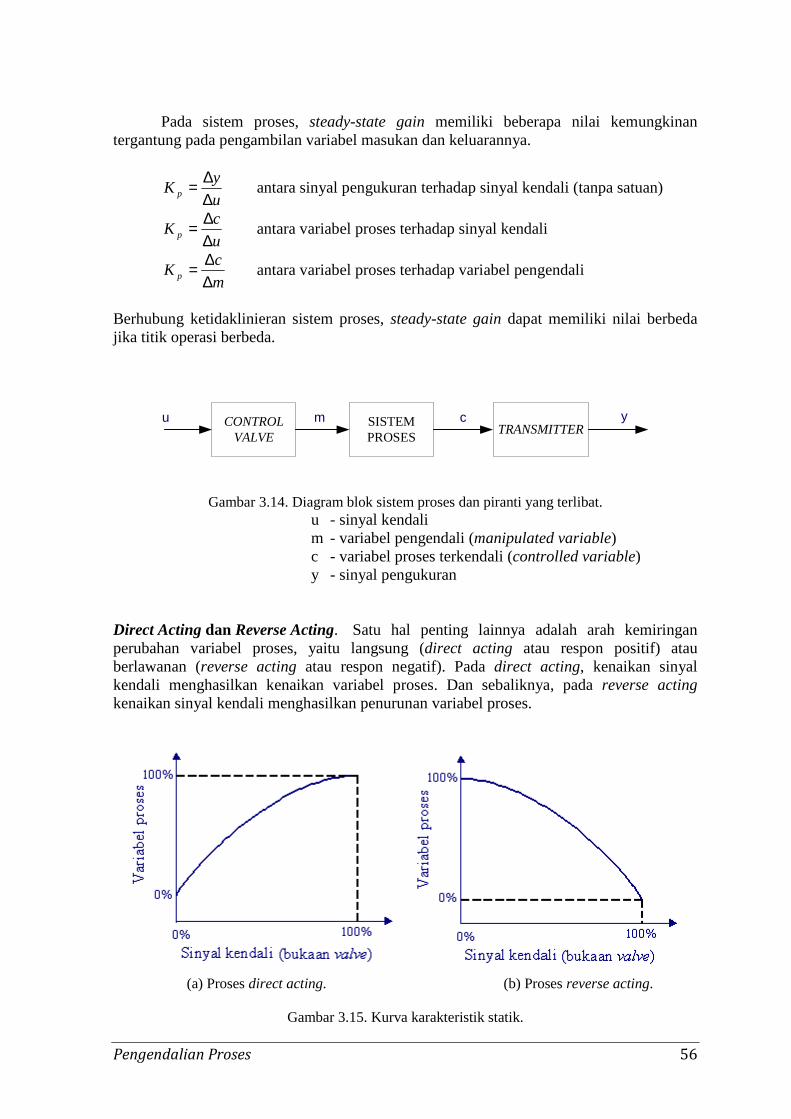
Pada sistem proses, steady-state gain memiliki beberapa nilai kemungkinan tergantung pada pengambilan variabel masukan dan keluarannya.
u
yK p ∆
∆= antara sinyal pengukuran terhadap sinyal kendali (tanpa satuan)
u
cK p ∆
∆= antara variabel proses terhadap sinyal kendali
m
cK p ∆
∆= antara variabel proses terhadap variabel pengendali
Berhubung ketidaklinieran sistem proses, steady-state gain dapat memiliki nilai berbeda jika titik operasi berbeda.
SISTEMPROSES
CONTROLVALVE
TRANSMITTERu ycm
Gambar 3.14. Diagram blok sistem proses dan piranti yang terlibat.
u - sinyal kendali m - variabel pengendali (manipulated variable) c - variabel proses terkendali (controlled variable) y - sinyal pengukuran Direct Acting dan Reverse Acting. Satu hal penting lainnya adalah arah kemiringan perubahan variabel proses, yaitu langsung (direct acting atau respon positif) atau berlawanan (reverse acting atau respon negatif). Pada direct acting, kenaikan sinyal kendali menghasilkan kenaikan variabel proses. Dan sebaliknya, pada reverse acting kenaikan sinyal kendali menghasilkan penurunan variabel proses.
(a) Proses direct acting. (b) Proses reverse acting.
Gambar 3.15. Kurva karakteristik statik.
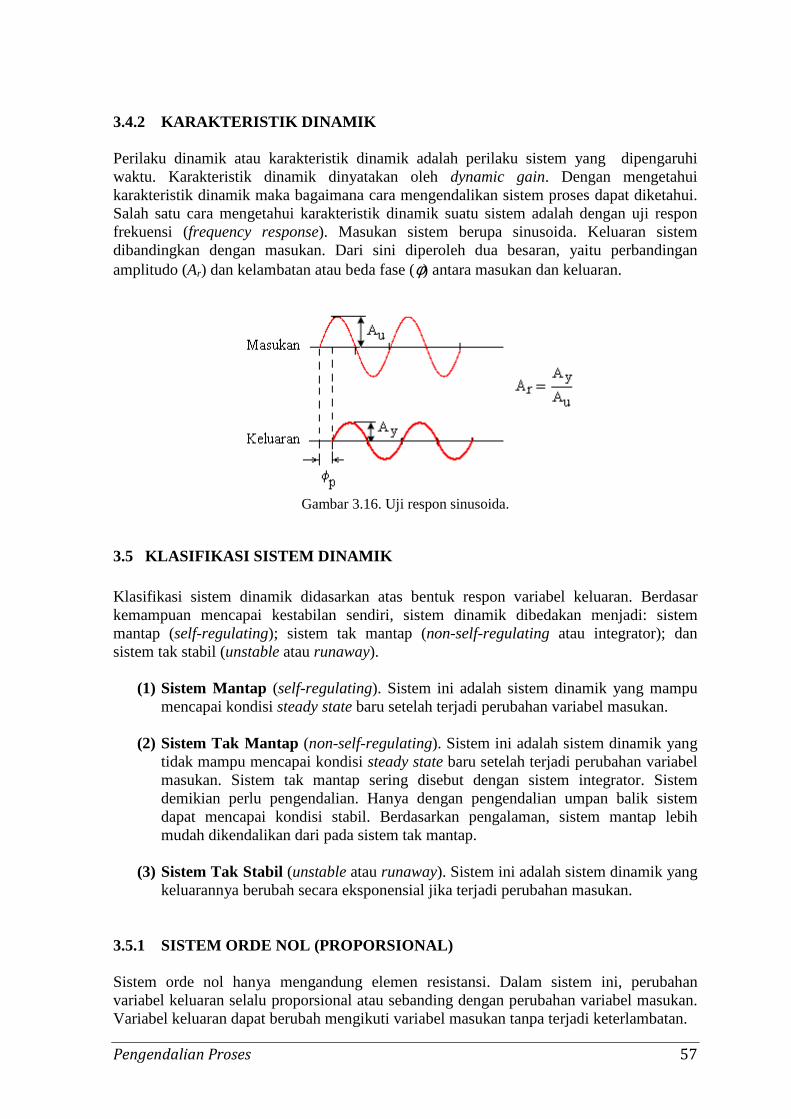
Pengendalian Proses 57
3.4.2 KARAKTERISTIK DINAMIK Perilaku dinamik atau karakteristik dinamik adalah perilaku sistem yang dipengaruhi waktu. Karakteristik dinamik dinyatakan oleh dynamic gain. Dengan mengetahui karakteristik dinamik maka bagaimana cara mengendalikan sistem proses dapat diketahui. Salah satu cara mengetahui karakteristik dinamik suatu sistem adalah dengan uji respon frekuensi (frequency response). Masukan sistem berupa sinusoida. Keluaran sistem dibandingkan dengan masukan. Dari sini diperoleh dua besaran, yaitu perbandingan amplitudo (Ar) dan kelambatan atau beda fase (φ) antara masukan dan keluaran.
Gambar 3.16. Uji respon sinusoida.
3.5 KLASIFIKASI SISTEM DINAMIK Klasifikasi sistem dinamik didasarkan atas bentuk respon variabel keluaran. Berdasar kemampuan mencapai kestabilan sendiri, sistem dinamik dibedakan menjadi: sistem mantap (self-regulating); sistem tak mantap (non-self-regulating atau integrator); dan sistem tak stabil (unstable atau runaway).
(1) Sistem Mantap (self-regulating). Sistem ini adalah sistem dinamik yang mampu mencapai kondisi steady state baru setelah terjadi perubahan variabel masukan.
(2) Sistem Tak Mantap (non-self-regulating). Sistem ini adalah sistem dinamik yang
tidak mampu mencapai kondisi steady state baru setelah terjadi perubahan variabel masukan. Sistem tak mantap sering disebut dengan sistem integrator. Sistem demikian perlu pengendalian. Hanya dengan pengendalian umpan balik sistem dapat mencapai kondisi stabil. Berdasarkan pengalaman, sistem mantap lebih mudah dikendalikan dari pada sistem tak mantap.
(3) Sistem Tak Stabil (unstable atau runaway). Sistem ini adalah sistem dinamik yang
keluarannya berubah secara eksponensial jika terjadi perubahan masukan. 3.5.1 SISTEM ORDE NOL (PROPORSIONAL) Sistem orde nol hanya mengandung elemen resistansi. Dalam sistem ini, perubahan variabel keluaran selalu proporsional atau sebanding dengan perubahan variabel masukan. Variabel keluaran dapat berubah mengikuti variabel masukan tanpa terjadi keterlambatan.
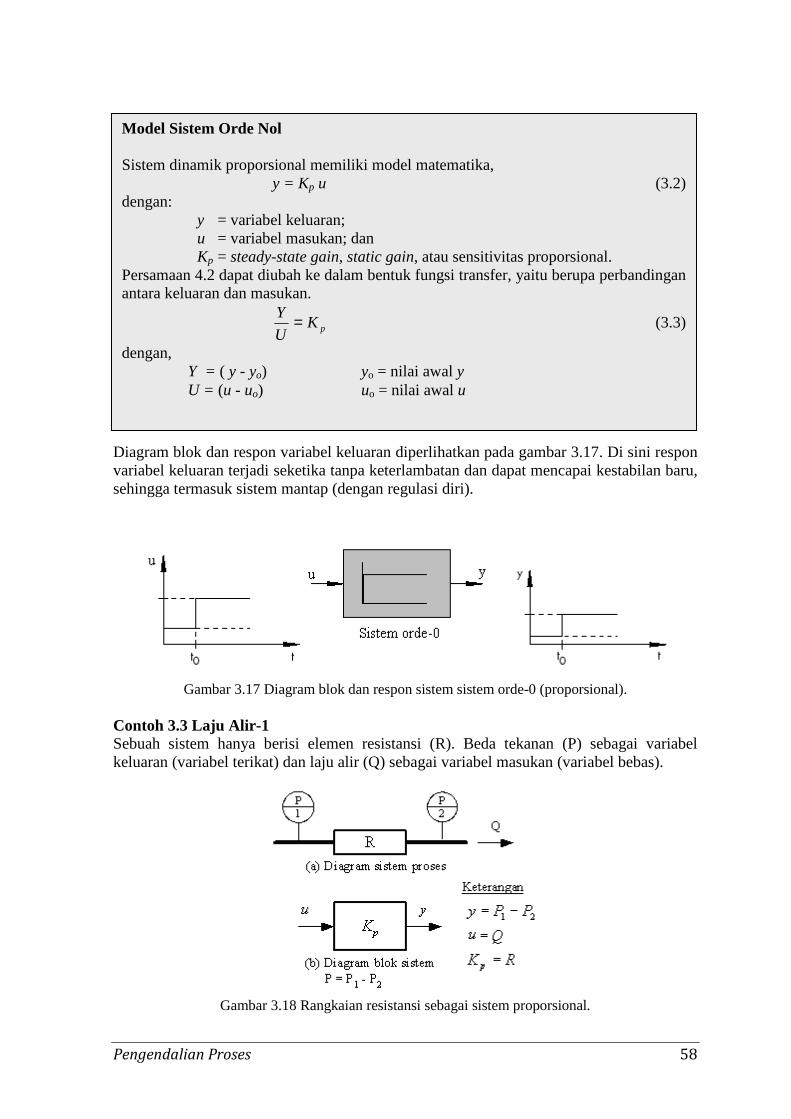
Pengendalian Proses 58
Diagram blok dan respon variabel keluaran diperlihatkan pada gambar 3.17. Di sini respon variabel keluaran terjadi seketika tanpa keterlambatan dan dapat mencapai kestabilan baru, sehingga termasuk sistem mantap (dengan regulasi diri).
Gambar 3.17 Diagram blok dan respon sistem sistem orde-0 (proporsional).
Contoh 3.3 Laju Alir-1 Sebuah sistem hanya berisi elemen resistansi (R). Beda tekanan (P) sebagai variabel keluaran (variabel terikat) dan laju alir (Q) sebagai variabel masukan (variabel bebas).
Gambar 3.18 Rangkaian resistansi sebagai sistem proporsional.
Model Sistem Orde Nol Sistem dinamik proporsional memiliki model matematika,
y = Kp u (3.2) dengan: y = variabel keluaran; u = variabel masukan; dan Kp = steady-state gain, static gain, atau sensitivitas proporsional. Persamaan 4.2 dapat diubah ke dalam bentuk fungsi transfer, yaitu berupa perbandingan antara keluaran dan masukan.
pKU
Y = (3.3)
dengan, Y = ( y - yo) yo = nilai awal y U = (u - uo) uo = nilai awal u
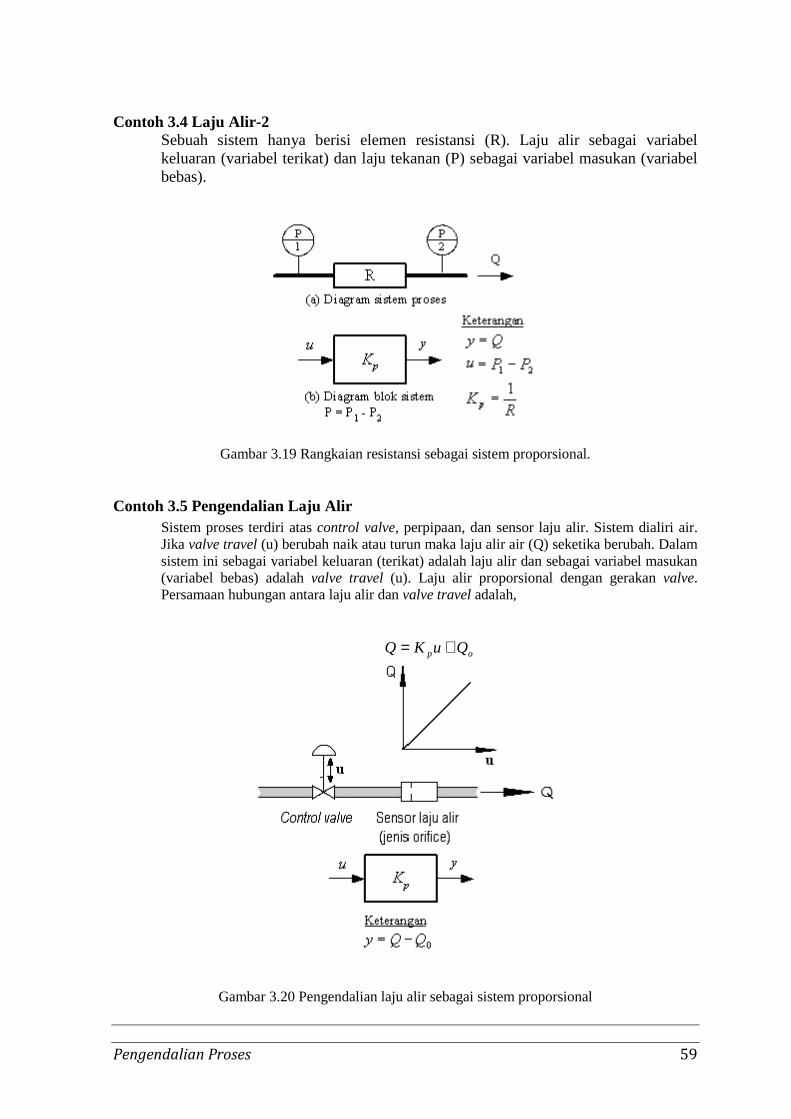
Pengendalian Proses 59
Contoh 3.4 Laju Alir-2 Sebuah sistem hanya berisi elemen resistansi (R). Laju alir sebagai variabel keluaran (variabel terikat) dan laju tekanan (P) sebagai variabel masukan (variabel bebas).
Gambar 3.19 Rangkaian resistansi sebagai sistem proporsional.
Contoh 3.5 Pengendalian Laju Alir Sistem proses terdiri atas control valve, perpipaan, dan sensor laju alir. Sistem dialiri air. Jika valve travel (u) berubah naik atau turun maka laju alir air (Q) seketika berubah. Dalam sistem ini sebagai variabel keluaran (terikat) adalah laju alir dan sebagai variabel masukan (variabel bebas) adalah valve travel (u). Laju alir proporsional dengan gerakan valve. Persamaan hubungan antara laju alir dan valve travel adalah,
op QuKQ +=
Gambar 3.20 Pengendalian laju alir sebagai sistem proporsional
Pengendalian Proses 60
3.5.2 SISTEM ORDE SATU Sistem orde satu berisi gabungan satu elemen resistansi dengan satu kapasitansi. Oleh adanya komponen tersebut, keadaan sistem (energi atau massa yang tersimpan) hanya dapat berubah secara berangsur, baik saat pengisian maupun pengeluaran. Akibatnya terdapat kelambatan respon variabel keluaran.
Kecepatan respon variabel keluaran selama periode transisi, sebelum tercapai steady state, tergantung pada besar kapasitas dan hambatan aliran yang memasuki komponen penyimpan. Sistem orde satu hanya memiliki satu komponen penyimpan energi dan/atau massa. Konstanta Waktu. Waktu yang diperlukan oleh variabel keluaran sistem dinamik untuk mencapai 63,2 % dari nilai akhirnya yang dihitung dari kondisi awal, jika masukan berubah sebagai fungsi step disebut konstanta waktu. Besaran ini menunjukkan seberapa cepat waktu yang digunakan untuk mencapai steady-state baru. Sehingga konstanta waktu menjadi ukuran keterlambatan. Semakin besar konstanta waktu (τp), berarti semakin besar komponen penyimpan massa/energi dan respon variabel keluaran semakin lambat.
Kelambatan sistem disebabkan adanya komponen yang bersifat menyimpan massa dan/atau energi.
Konstanta waktu menentukan perilaku dinamik sistem
Model Sistem Orde Satu Persamaan model sistem orde satu adalah,
uKydt
dypp =+τ (3.4)
dengan : u = masukan sistem y = keluaran sistem τp� = konstanta waktu sistem, dan Kp = steady state gain. Fungsi transfer (Gp) sistem orde satu dapat dibuat dengan mengganti operator diferensial (d/dt) dengan (s) atau dengan transformasi Laplace. Jika nilai awal u dan y berturut-turut adalah uo dan yo maka dari persamaan (4.18) dapat diperoleh fungsi transfer sistem orde satu sebagai,
1+==
s
K
U
YG
p
pp τ
(3.5)
dengan, Y =( y - yo) U = (u - uo)
Jika masukan berupa fungsi step dengan perubahan sebesar A, maka hubungan keluaran dan masukan adalah (gambar 4.20),
( ) ot
p yeAKy p +−= − τ/1 (3.6)
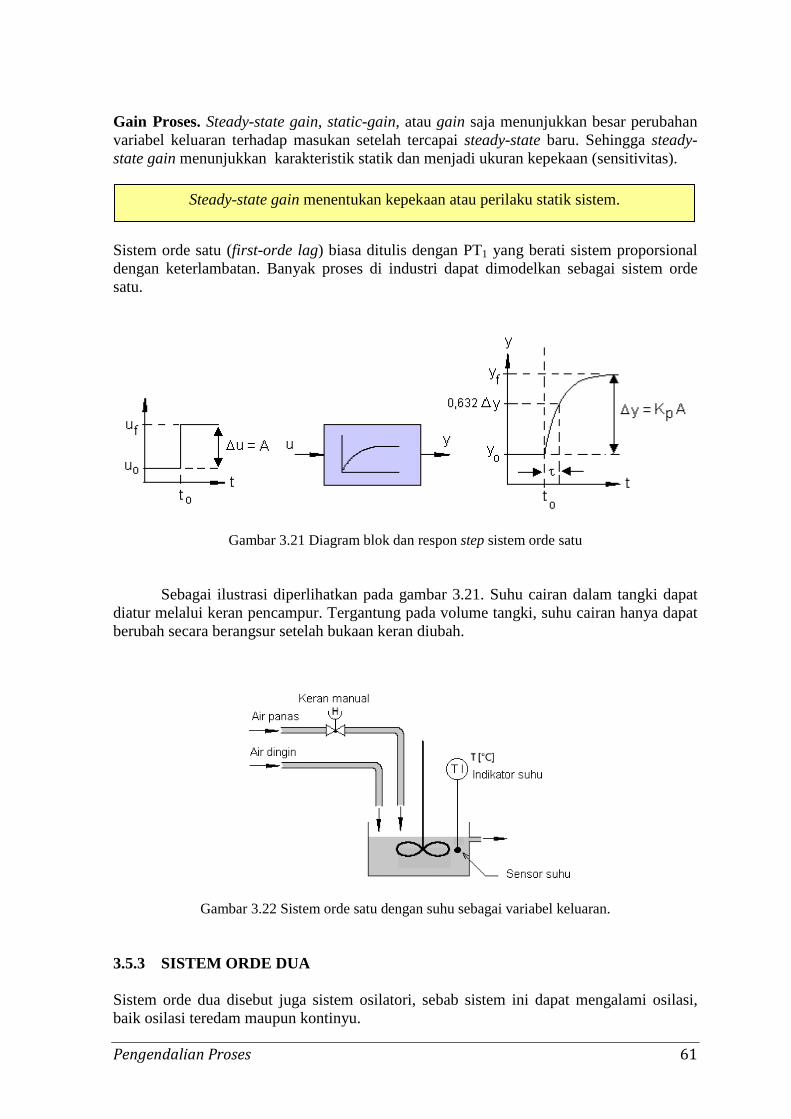
Pengendalian Proses 61
Gain Proses. Steady-state gain, static-gain, atau gain saja menunjukkan besar perubahan variabel keluaran terhadap masukan setelah tercapai steady-state baru. Sehingga steady-state gain menunjukkan karakteristik statik dan menjadi ukuran kepekaan (sensitivitas). Sistem orde satu (first-orde lag) biasa ditulis dengan PT1 yang berati sistem proporsional dengan keterlambatan. Banyak proses di industri dapat dimodelkan sebagai sistem orde satu.
Gambar 3.21 Diagram blok dan respon step sistem orde satu
Sebagai ilustrasi diperlihatkan pada gambar 3.21. Suhu cairan dalam tangki dapat diatur melalui keran pencampur. Tergantung pada volume tangki, suhu cairan hanya dapat berubah secara berangsur setelah bukaan keran diubah.
Gambar 3.22 Sistem orde satu dengan suhu sebagai variabel keluaran.
3.5.3 SISTEM ORDE DUA Sistem orde dua disebut juga sistem osilatori, sebab sistem ini dapat mengalami osilasi, baik osilasi teredam maupun kontinyu.
Steady-state gain menentukan kepekaan atau perilaku statik sistem.
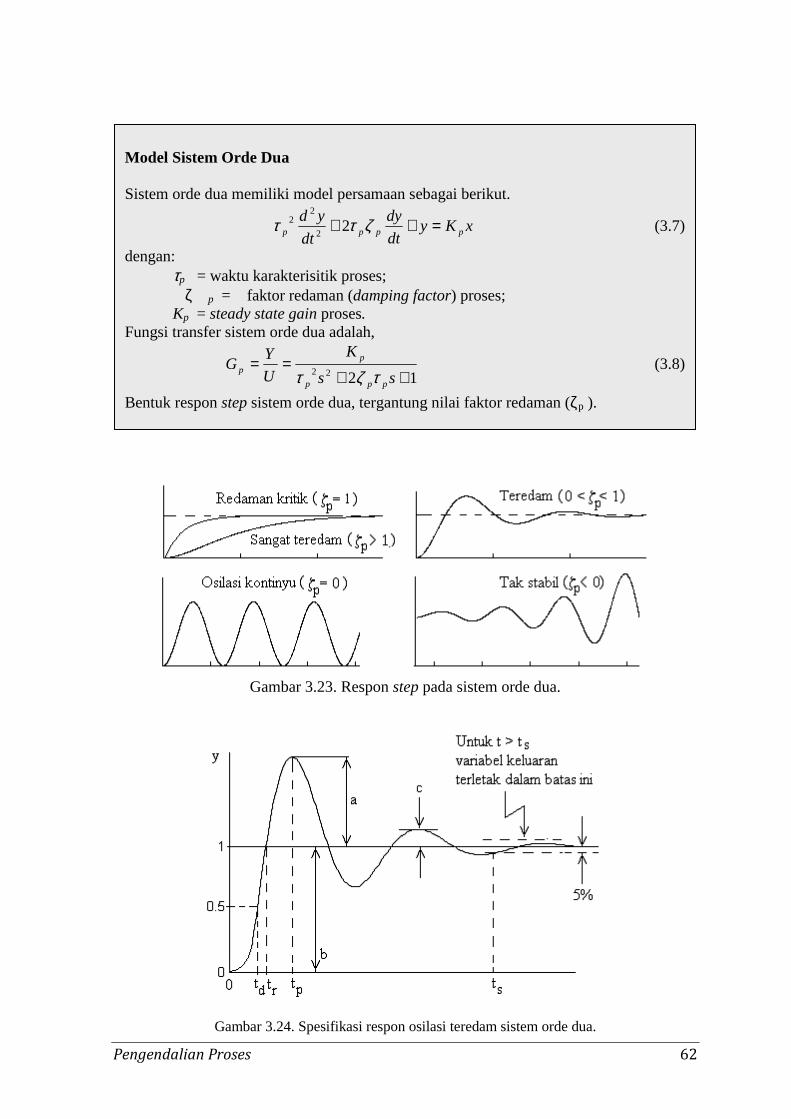
Pengendalian Proses 62
Gambar 3.23. Respon step pada sistem orde dua.
Gambar 3.24. Spesifikasi respon osilasi teredam sistem orde dua.
Model Sistem Orde Dua Sistem orde dua memiliki model persamaan sebagai berikut.
xKydt
dy
dt
ydpppp =++ ζττ 2
2
22 (3.7)
dengan: τp = waktu karakterisitik proses; �ζ� p = �faktor redaman (damping factor) proses; Kp = steady state gain proses.
Fungsi transfer sistem orde dua adalah,
1222 ++==
ss
K
U
YG
ppp
pp τζτ
(3.8)
Bentuk respon step sistem orde dua, tergantung nilai faktor redaman (ζp ).
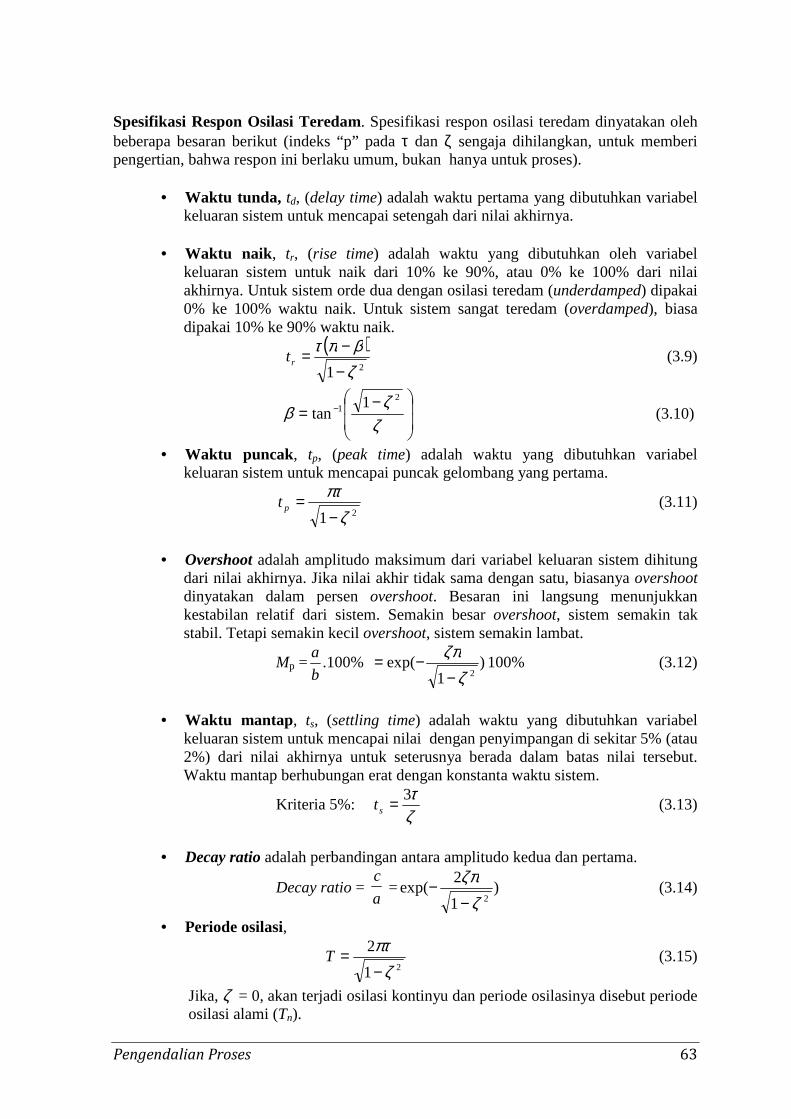
Pengendalian Proses 63
Spesifikasi Respon Osilasi Teredam. Spesifikasi respon osilasi teredam dinyatakan oleh beberapa besaran berikut (indeks “p” pada τ dan ζ sengaja dihilangkan, untuk memberi pengertian, bahwa respon ini berlaku umum, bukan hanya untuk proses).
• Waktu tunda, td, (delay time) adalah waktu pertama yang dibutuhkan variabel keluaran sistem untuk mencapai setengah dari nilai akhirnya.
• Waktu naik, tr, (rise time) adalah waktu yang dibutuhkan oleh variabel
keluaran sistem untuk naik dari 10% ke 90%, atau 0% ke 100% dari nilai akhirnya. Untuk sistem orde dua dengan osilasi teredam (underdamped) dipakai 0% ke 100% waktu naik. Untuk sistem sangat teredam (overdamped), biasa dipakai 10% ke 90% waktu naik.
( )21 ζ
βπτ−−=rt (3.9)
−= −
ζζ
β2
1 1tan (3.10)
• Waktu puncak, tp, (peak time) adalah waktu yang dibutuhkan variabel keluaran sistem untuk mencapai puncak gelombang yang pertama.
21 ζπτ−
=pt (3.11)
• Overshoot adalah amplitudo maksimum dari variabel keluaran sistem dihitung
dari nilai akhirnya. Jika nilai akhir tidak sama dengan satu, biasanya overshoot dinyatakan dalam persen overshoot. Besaran ini langsung menunjukkan kestabilan relatif dari sistem. Semakin besar overshoot, sistem semakin tak stabil. Tetapi semakin kecil overshoot, sistem semakin lambat.
Mp = %100.b
a %100)
1exp(
2ζζπ−
−= (3.12)
• Waktu mantap, ts, (settling time) adalah waktu yang dibutuhkan variabel
keluaran sistem untuk mencapai nilai dengan penyimpangan di sekitar 5% (atau 2%) dari nilai akhirnya untuk seterusnya berada dalam batas nilai tersebut. Waktu mantap berhubungan erat dengan konstanta waktu sistem.
Kriteria 5%: ζτ3=st (3.13)
• Decay ratio adalah perbandingan antara amplitudo kedua dan pertama.
Decay ratio = c
a = )
1
2exp(
2ζζπ−
− (3.14)
• Periode osilasi,
21
2
ζπτ−
=T (3.15)
Jika, ζ = 0, akan terjadi osilasi kontinyu dan periode osilasinya disebut periode osilasi alami (Tn).
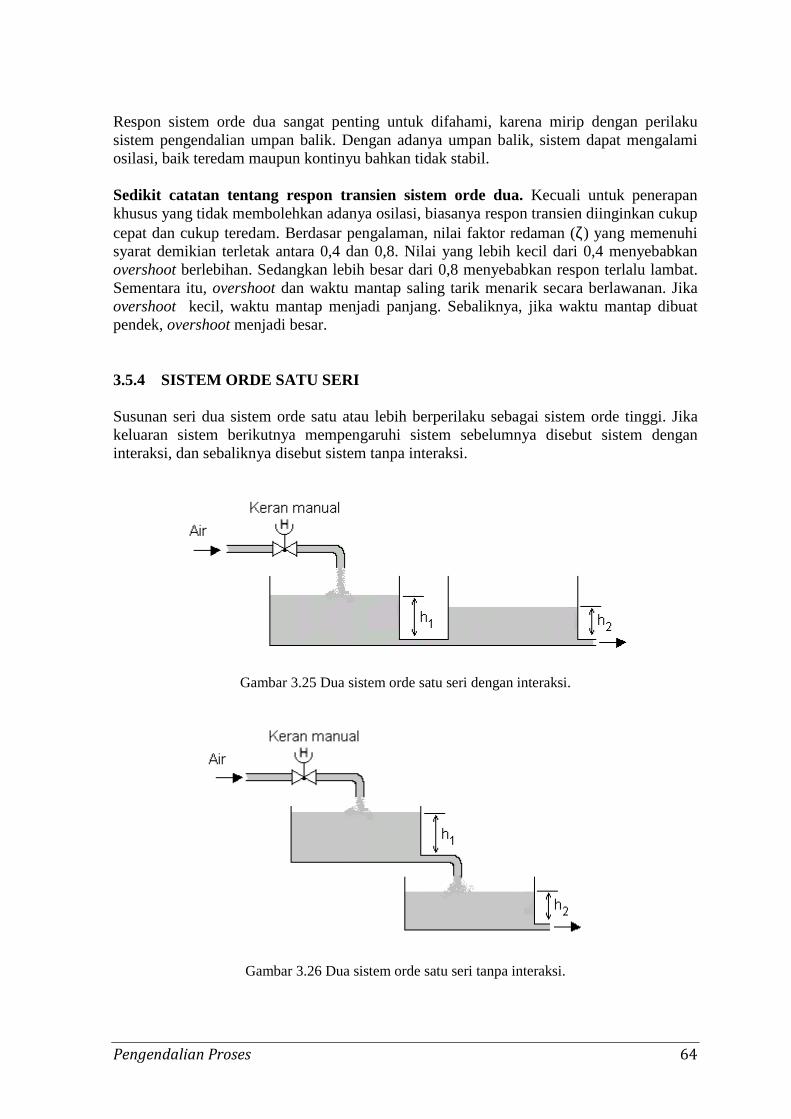
Pengendalian Proses 64
Respon sistem orde dua sangat penting untuk difahami, karena mirip dengan perilaku sistem pengendalian umpan balik. Dengan adanya umpan balik, sistem dapat mengalami osilasi, baik teredam maupun kontinyu bahkan tidak stabil. Sedikit catatan tentang respon transien sistem orde dua. Kecuali untuk penerapan khusus yang tidak membolehkan adanya osilasi, biasanya respon transien diinginkan cukup cepat dan cukup teredam. Berdasar pengalaman, nilai faktor redaman (ζ) yang memenuhi syarat demikian terletak antara 0,4 dan 0,8. Nilai yang lebih kecil dari 0,4 menyebabkan overshoot berlebihan. Sedangkan lebih besar dari 0,8 menyebabkan respon terlalu lambat. Sementara itu, overshoot dan waktu mantap saling tarik menarik secara berlawanan. Jika overshoot kecil, waktu mantap menjadi panjang. Sebaliknya, jika waktu mantap dibuat pendek, overshoot menjadi besar. 3.5.4 SISTEM ORDE SATU SERI Susunan seri dua sistem orde satu atau lebih berperilaku sebagai sistem orde tinggi. Jika keluaran sistem berikutnya mempengaruhi sistem sebelumnya disebut sistem dengan interaksi, dan sebaliknya disebut sistem tanpa interaksi.
Gambar 3.25 Dua sistem orde satu seri dengan interaksi.
Gambar 3.26 Dua sistem orde satu seri tanpa interaksi.
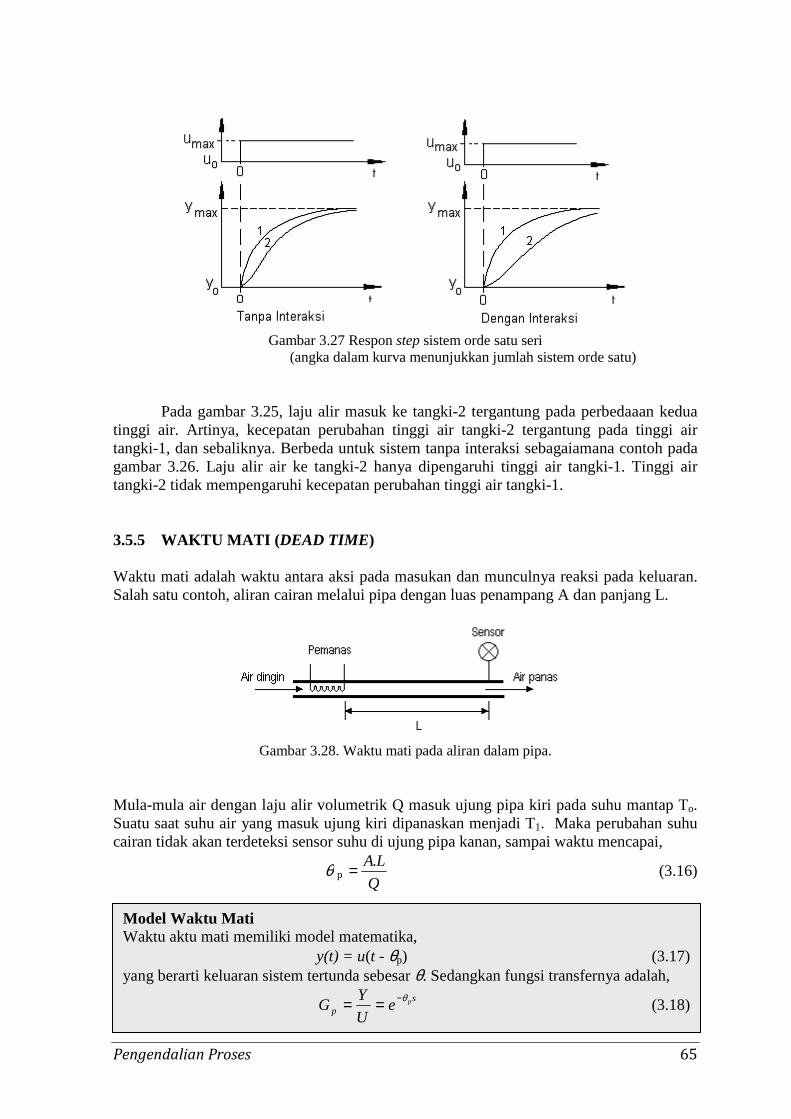
Pengendalian Proses 65
Gambar 3.27 Respon step sistem orde satu seri
(angka dalam kurva menunjukkan jumlah sistem orde satu) Pada gambar 3.25, laju alir masuk ke tangki-2 tergantung pada perbedaaan kedua tinggi air. Artinya, kecepatan perubahan tinggi air tangki-2 tergantung pada tinggi air tangki-1, dan sebaliknya. Berbeda untuk sistem tanpa interaksi sebagaiamana contoh pada gambar 3.26. Laju alir air ke tangki-2 hanya dipengaruhi tinggi air tangki-1. Tinggi air tangki-2 tidak mempengaruhi kecepatan perubahan tinggi air tangki-1. 3.5.5 WAKTU MATI (DEAD TIME) Waktu mati adalah waktu antara aksi pada masukan dan munculnya reaksi pada keluaran. Salah satu contoh, aliran cairan melalui pipa dengan luas penampang A dan panjang L.
Gambar 3.28. Waktu mati pada aliran dalam pipa. Mula-mula air dengan laju alir volumetrik Q masuk ujung pipa kiri pada suhu mantap To. Suatu saat suhu air yang masuk ujung kiri dipanaskan menjadi T1. Maka perubahan suhu cairan tidak akan terdeteksi sensor suhu di ujung pipa kanan, sampai waktu mencapai,
θ p Q
LA.= (3.16)
Model Waktu Mati Waktu aktu mati memiliki model matematika,
y(t) = u(t - θp) (3.17) yang berarti keluaran sistem tertunda sebesar θ. Sedangkan fungsi transfernya adalah,
sp
peU
YG
θ−== (3.18)
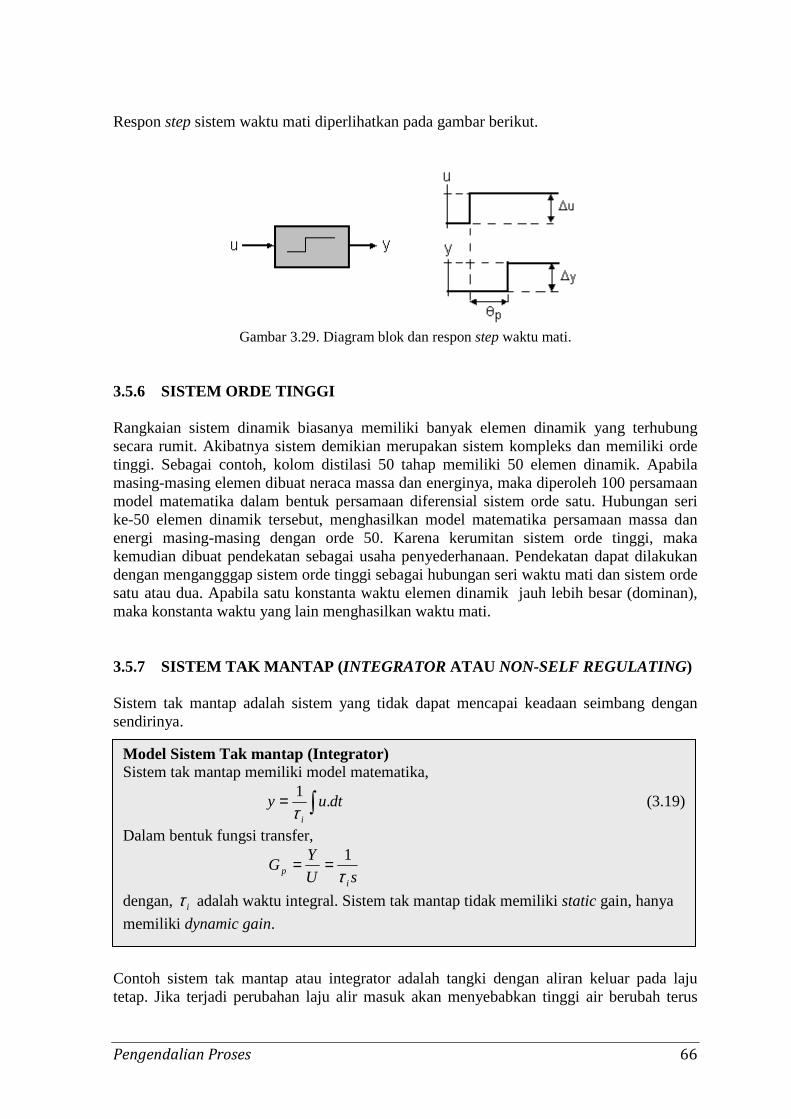
Pengendalian Proses 66
Respon step sistem waktu mati diperlihatkan pada gambar berikut.
Gambar 3.29. Diagram blok dan respon step waktu mati.
3.5.6 SISTEM ORDE TINGGI Rangkaian sistem dinamik biasanya memiliki banyak elemen dinamik yang terhubung secara rumit. Akibatnya sistem demikian merupakan sistem kompleks dan memiliki orde tinggi. Sebagai contoh, kolom distilasi 50 tahap memiliki 50 elemen dinamik. Apabila masing-masing elemen dibuat neraca massa dan energinya, maka diperoleh 100 persamaan model matematika dalam bentuk persamaan diferensial sistem orde satu. Hubungan seri ke-50 elemen dinamik tersebut, menghasilkan model matematika persamaan massa dan energi masing-masing dengan orde 50. Karena kerumitan sistem orde tinggi, maka kemudian dibuat pendekatan sebagai usaha penyederhanaan. Pendekatan dapat dilakukan dengan mengangggap sistem orde tinggi sebagai hubungan seri waktu mati dan sistem orde satu atau dua. Apabila satu konstanta waktu elemen dinamik jauh lebih besar (dominan), maka konstanta waktu yang lain menghasilkan waktu mati. 3.5.7 SISTEM TAK MANTAP (INTEGRATOR ATAU NON-SELF REGULATING) Sistem tak mantap adalah sistem yang tidak dapat mencapai keadaan seimbang dengan sendirinya. Contoh sistem tak mantap atau integrator adalah tangki dengan aliran keluar pada laju tetap. Jika terjadi perubahan laju alir masuk akan menyebabkan tinggi air berubah terus
Model Sistem Tak mantap (Integrator) Sistem tak mantap memiliki model matematika,
∫= dtuyi
.1
τ (3.19)
Dalam bentuk fungsi transfer,
sU
YG
ip τ
1==
dengan, iτ adalah waktu integral. Sistem tak mantap tidak memiliki static gain, hanya
memiliki dynamic gain.
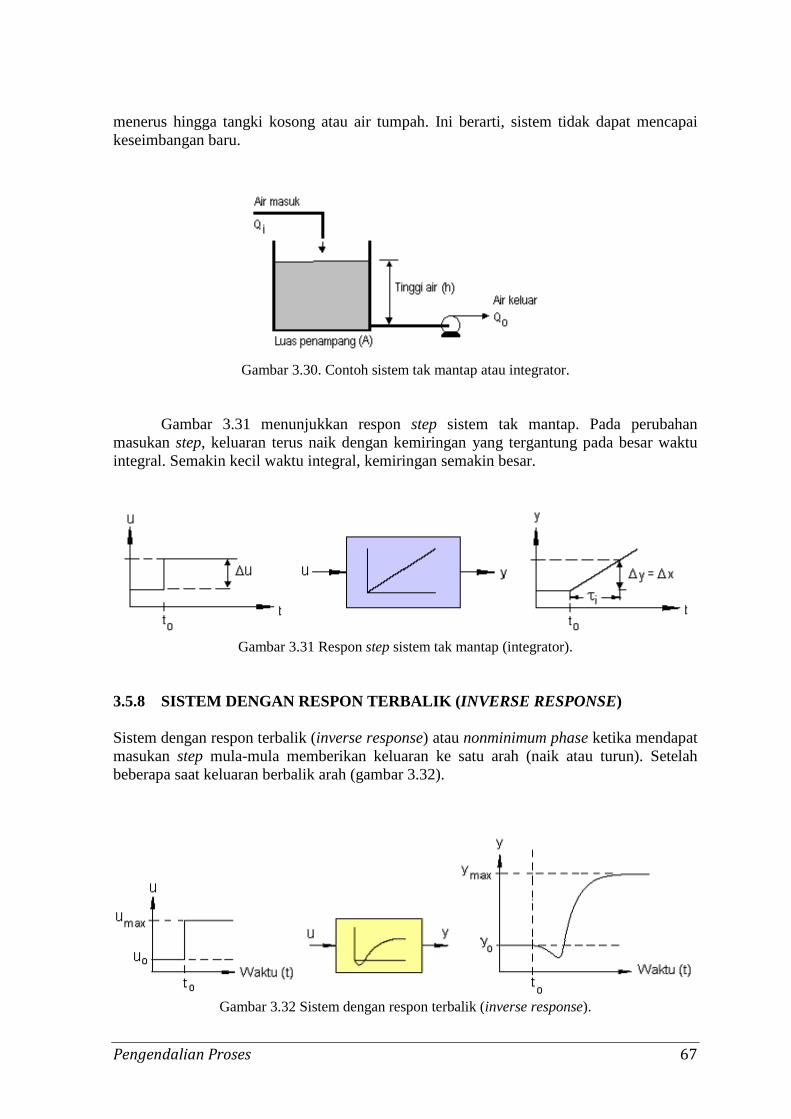
Pengendalian Proses 67
menerus hingga tangki kosong atau air tumpah. Ini berarti, sistem tidak dapat mencapai keseimbangan baru.
Gambar 3.30. Contoh sistem tak mantap atau integrator.
Gambar 3.31 menunjukkan respon step sistem tak mantap. Pada perubahan
masukan step, keluaran terus naik dengan kemiringan yang tergantung pada besar waktu integral. Semakin kecil waktu integral, kemiringan semakin besar.
Gambar 3.31 Respon step sistem tak mantap (integrator).
3.5.8 SISTEM DENGAN RESPON TERBALIK (INVERSE RESPONSE) Sistem dengan respon terbalik (inverse response) atau nonminimum phase ketika mendapat masukan step mula-mula memberikan keluaran ke satu arah (naik atau turun). Setelah beberapa saat keluaran berbalik arah (gambar 3.32).
Gambar 3.32 Sistem dengan respon terbalik (inverse response).
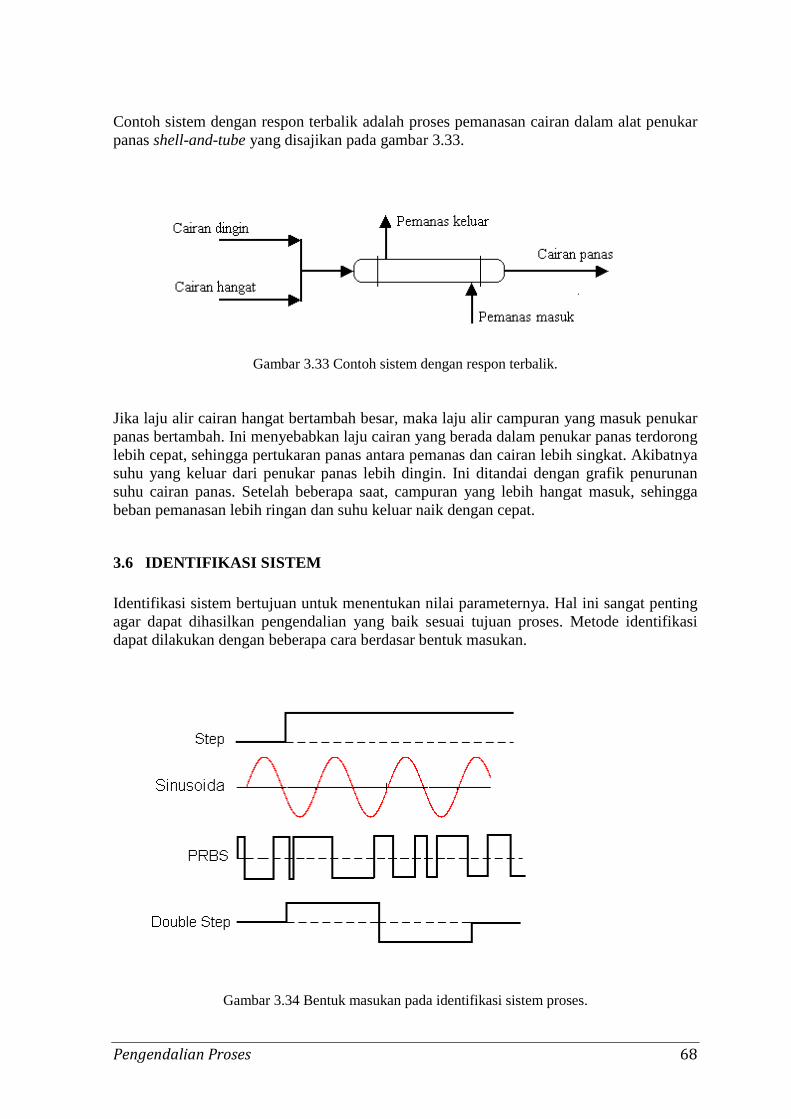
Pengendalian Proses 68
Contoh sistem dengan respon terbalik adalah proses pemanasan cairan dalam alat penukar panas shell-and-tube yang disajikan pada gambar 3.33.
Gambar 3.33 Contoh sistem dengan respon terbalik. Jika laju alir cairan hangat bertambah besar, maka laju alir campuran yang masuk penukar panas bertambah. Ini menyebabkan laju cairan yang berada dalam penukar panas terdorong lebih cepat, sehingga pertukaran panas antara pemanas dan cairan lebih singkat. Akibatnya suhu yang keluar dari penukar panas lebih dingin. Ini ditandai dengan grafik penurunan suhu cairan panas. Setelah beberapa saat, campuran yang lebih hangat masuk, sehingga beban pemanasan lebih ringan dan suhu keluar naik dengan cepat.
3.6 IDENTIFIKASI SISTEM Identifikasi sistem bertujuan untuk menentukan nilai parameternya. Hal ini sangat penting agar dapat dihasilkan pengendalian yang baik sesuai tujuan proses. Metode identifikasi dapat dilakukan dengan beberapa cara berdasar bentuk masukan.
Gambar 3.34 Bentuk masukan pada identifikasi sistem proses.
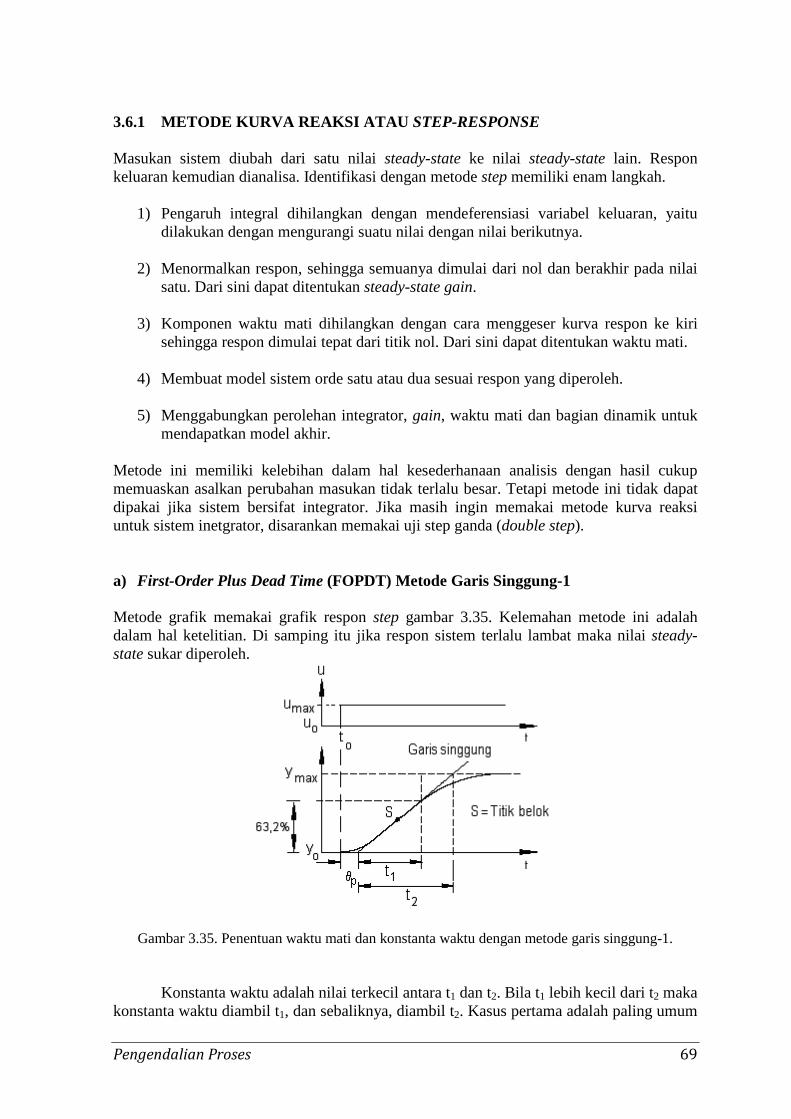
Pengendalian Proses 69
3.6.1 METODE KURVA REAKSI ATAU STEP-RESPONSE Masukan sistem diubah dari satu nilai steady-state ke nilai steady-state lain. Respon keluaran kemudian dianalisa. Identifikasi dengan metode step memiliki enam langkah.
1) Pengaruh integral dihilangkan dengan mendeferensiasi variabel keluaran, yaitu dilakukan dengan mengurangi suatu nilai dengan nilai berikutnya.
2) Menormalkan respon, sehingga semuanya dimulai dari nol dan berakhir pada nilai
satu. Dari sini dapat ditentukan steady-state gain.
3) Komponen waktu mati dihilangkan dengan cara menggeser kurva respon ke kiri sehingga respon dimulai tepat dari titik nol. Dari sini dapat ditentukan waktu mati.
4) Membuat model sistem orde satu atau dua sesuai respon yang diperoleh.
5) Menggabungkan perolehan integrator, gain, waktu mati dan bagian dinamik untuk
mendapatkan model akhir. Metode ini memiliki kelebihan dalam hal kesederhanaan analisis dengan hasil cukup memuaskan asalkan perubahan masukan tidak terlalu besar. Tetapi metode ini tidak dapat dipakai jika sistem bersifat integrator. Jika masih ingin memakai metode kurva reaksi untuk sistem inetgrator, disarankan memakai uji step ganda (double step). a) First-Order Plus Dead Time (FOPDT) Metode Garis Singgung-1 Metode grafik memakai grafik respon step gambar 3.35. Kelemahan metode ini adalah dalam hal ketelitian. Di samping itu jika respon sistem terlalu lambat maka nilai steady-state sukar diperoleh.
Gambar 3.35. Penentuan waktu mati dan konstanta waktu dengan metode garis singgung-1. Konstanta waktu adalah nilai terkecil antara t1 dan t2. Bila t1 lebih kecil dari t2 maka konstanta waktu diambil t1, dan sebaliknya, diambil t2. Kasus pertama adalah paling umum
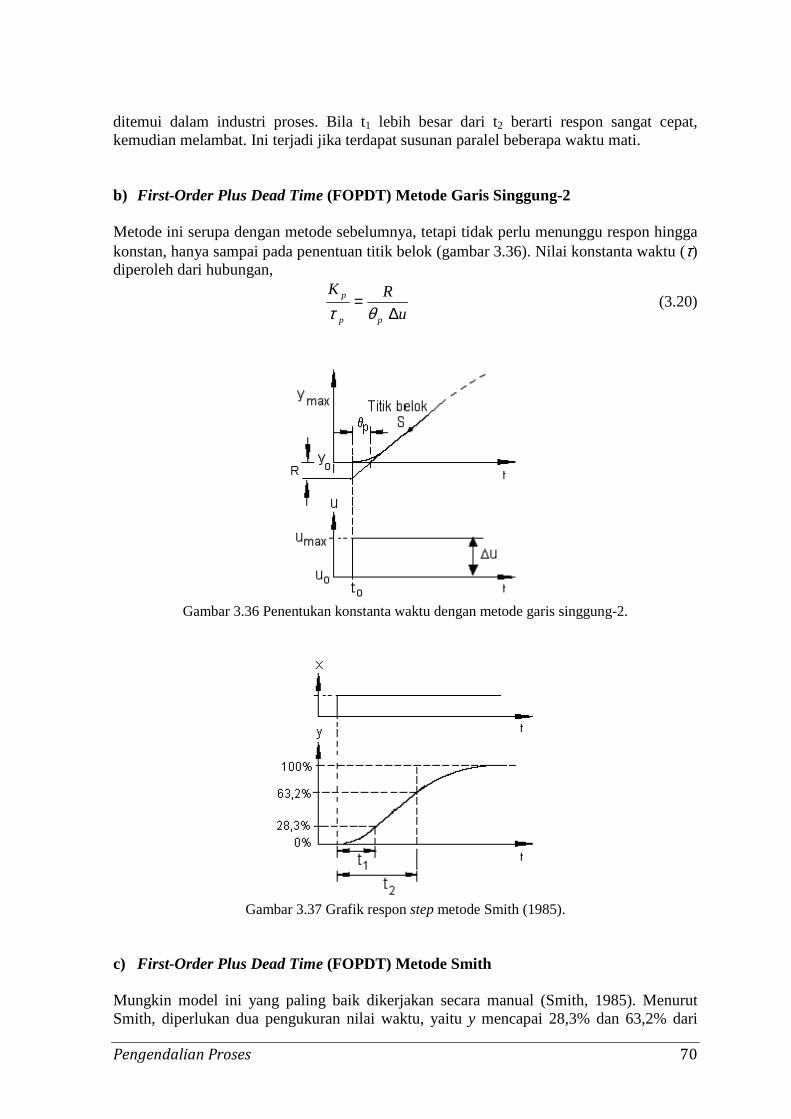
Pengendalian Proses 70
ditemui dalam industri proses. Bila t1 lebih besar dari t2 berarti respon sangat cepat, kemudian melambat. Ini terjadi jika terdapat susunan paralel beberapa waktu mati. b) First-Order Plus Dead Time (FOPDT) Metode Garis Singgung-2 Metode ini serupa dengan metode sebelumnya, tetapi tidak perlu menunggu respon hingga konstan, hanya sampai pada penentuan titik belok (gambar 3.36). Nilai konstanta waktu (τ) diperoleh dari hubungan,
u
RK
pp
p
∆=
θτ (3.20)
Gambar 3.36 Penentukan konstanta waktu dengan metode garis singgung-2.
Gambar 3.37 Grafik respon step metode Smith (1985).
c) First-Order Plus Dead Time (FOPDT) Metode Smith Mungkin model ini yang paling baik dikerjakan secara manual (Smith, 1985). Menurut Smith, diperlukan dua pengukuran nilai waktu, yaitu y mencapai 28,3% dan 63,2% dari
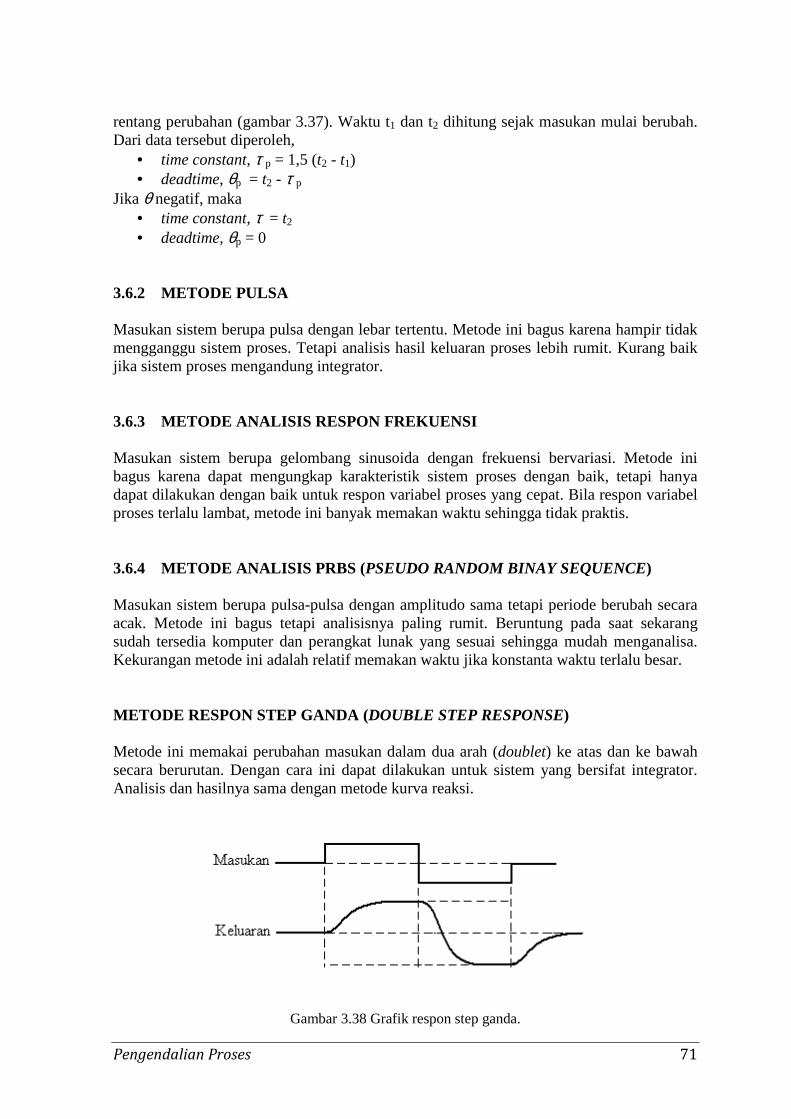
Pengendalian Proses 71
rentang perubahan (gambar 3.37). Waktu t1 dan t2 dihitung sejak masukan mulai berubah. Dari data tersebut diperoleh,
• time constant, τ p = 1,5 (t2 - t1) • deadtime, θp = t2 - τ p
Jika θ negatif, maka • time constant, τ = t2 • deadtime, θp = 0
3.6.2 METODE PULSA Masukan sistem berupa pulsa dengan lebar tertentu. Metode ini bagus karena hampir tidak mengganggu sistem proses. Tetapi analisis hasil keluaran proses lebih rumit. Kurang baik jika sistem proses mengandung integrator. 3.6.3 METODE ANALISIS RESPON FREKUENSI Masukan sistem berupa gelombang sinusoida dengan frekuensi bervariasi. Metode ini bagus karena dapat mengungkap karakteristik sistem proses dengan baik, tetapi hanya dapat dilakukan dengan baik untuk respon variabel proses yang cepat. Bila respon variabel proses terlalu lambat, metode ini banyak memakan waktu sehingga tidak praktis. 3.6.4 METODE ANALISIS PRBS (PSEUDO RANDOM BINAY SEQUENCE) Masukan sistem berupa pulsa-pulsa dengan amplitudo sama tetapi periode berubah secara acak. Metode ini bagus tetapi analisisnya paling rumit. Beruntung pada saat sekarang sudah tersedia komputer dan perangkat lunak yang sesuai sehingga mudah menganalisa. Kekurangan metode ini adalah relatif memakan waktu jika konstanta waktu terlalu besar. METODE RESPON STEP GANDA (DOUBLE STEP RESPONSE) Metode ini memakai perubahan masukan dalam dua arah (doublet) ke atas dan ke bawah secara berurutan. Dengan cara ini dapat dilakukan untuk sistem yang bersifat integrator. Analisis dan hasilnya sama dengan metode kurva reaksi.
Gambar 3.38 Grafik respon step ganda.
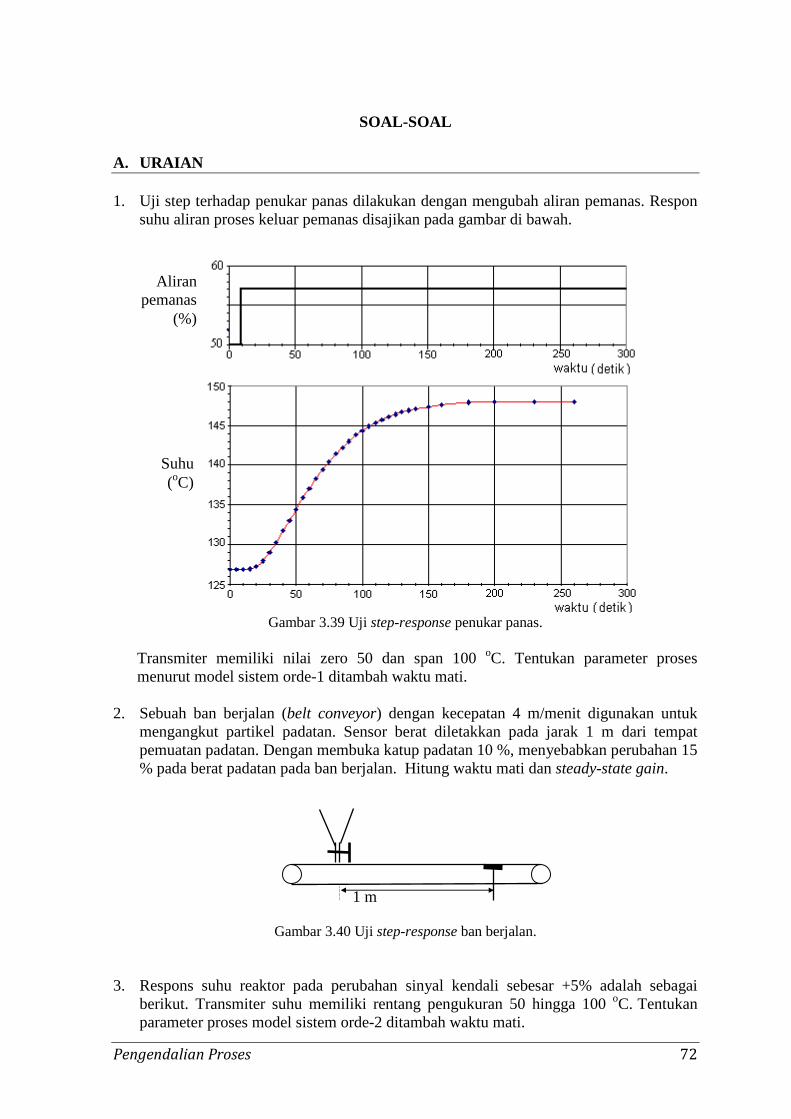
Pengendalian Proses 72
SOAL-SOAL A. URAIAN 1. Uji step terhadap penukar panas dilakukan dengan mengubah aliran pemanas. Respon
suhu aliran proses keluar pemanas disajikan pada gambar di bawah.
Gambar 3.39 Uji step-response penukar panas. Transmiter memiliki nilai zero 50 dan span 100 oC. Tentukan parameter proses menurut model sistem orde-1 ditambah waktu mati.
2. Sebuah ban berjalan (belt conveyor) dengan kecepatan 4 m/menit digunakan untuk
mengangkut partikel padatan. Sensor berat diletakkan pada jarak 1 m dari tempat pemuatan padatan. Dengan membuka katup padatan 10 %, menyebabkan perubahan 15 % pada berat padatan pada ban berjalan. Hitung waktu mati dan steady-state gain.
1 m
Gambar 3.40 Uji step-response ban berjalan.
3. Respons suhu reaktor pada perubahan sinyal kendali sebesar +5% adalah sebagai
berikut. Transmiter suhu memiliki rentang pengukuran 50 hingga 100 oC. Tentukan parameter proses model sistem orde-2 ditambah waktu mati.
Suhu (oC)
Aliran pemanas
(%)
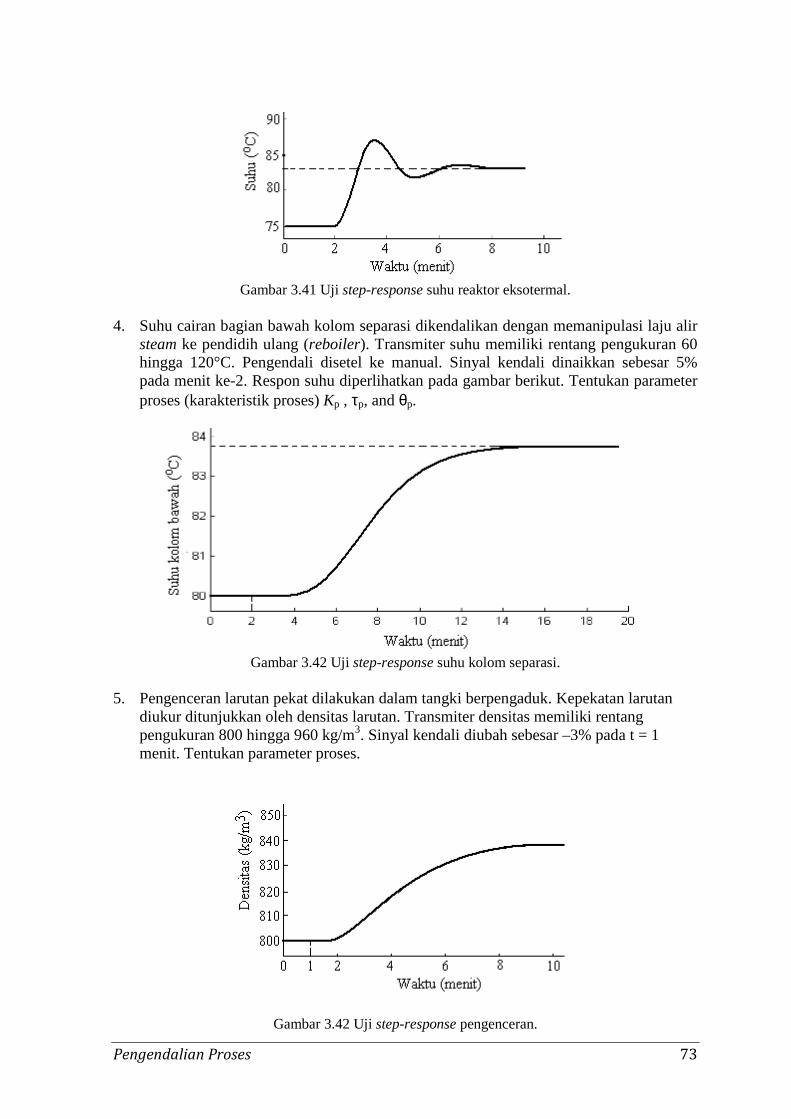
Pengendalian Proses 73
Gambar 3.41 Uji step-response suhu reaktor eksotermal.
4. Suhu cairan bagian bawah kolom separasi dikendalikan dengan memanipulasi laju alir
steam ke pendidih ulang (reboiler). Transmiter suhu memiliki rentang pengukuran 60 hingga 120°C. Pengendali disetel ke manual. Sinyal kendali dinaikkan sebesar 5% pada menit ke-2. Respon suhu diperlihatkan pada gambar berikut. Tentukan parameter proses (karakteristik proses) Kp , τp, and θp.
Gambar 3.42 Uji step-response suhu kolom separasi.
5. Pengenceran larutan pekat dilakukan dalam tangki berpengaduk. Kepekatan larutan
diukur ditunjukkan oleh densitas larutan. Transmiter densitas memiliki rentang pengukuran 800 hingga 960 kg/m3. Sinyal kendali diubah sebesar –3% pada t = 1 menit. Tentukan parameter proses.
Gambar 3.42 Uji step-response pengenceran.
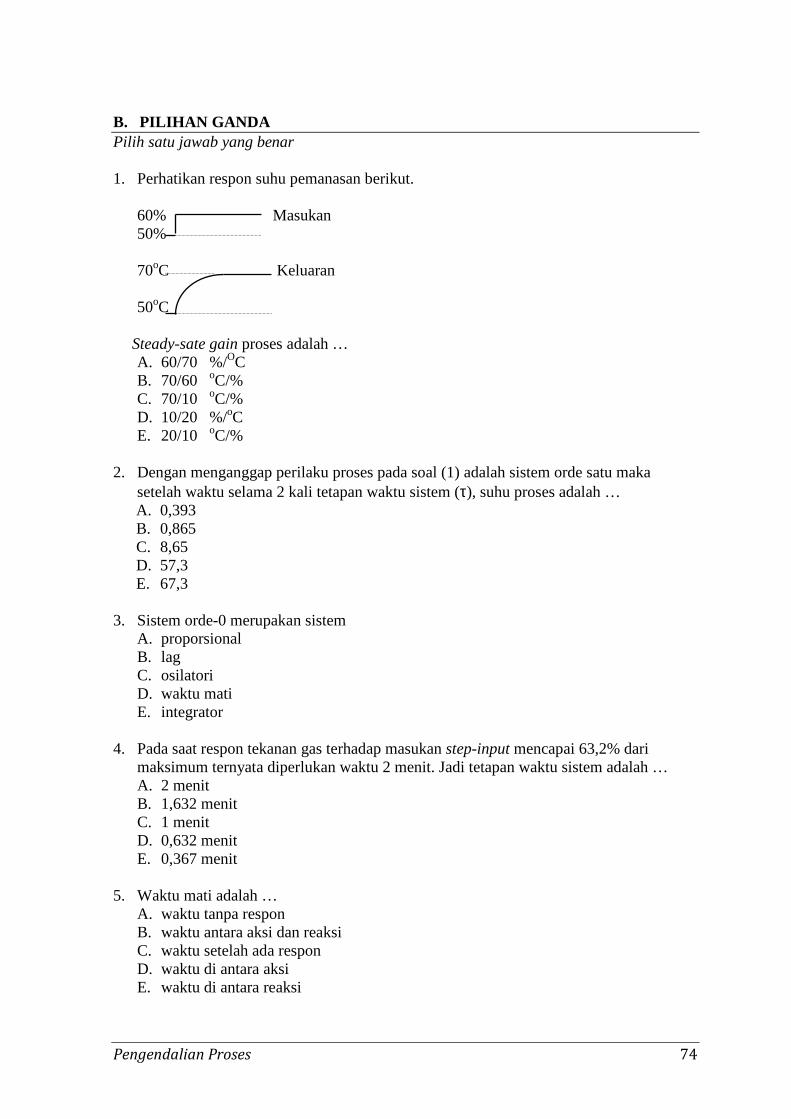
Pengendalian Proses 74
B. PILIHAN GANDA Pilih satu jawab yang benar 1. Perhatikan respon suhu pemanasan berikut. 60% Masukan 50% 70oC Keluaran 50oC
Steady-sate gain proses adalah …
A. 60/70 %/OC B. 70/60 oC/% C. 70/10 oC/% D. 10/20 %/oC E. 20/10 oC/%
2. Dengan menganggap perilaku proses pada soal (1) adalah sistem orde satu maka
setelah waktu selama 2 kali tetapan waktu sistem (τ), suhu proses adalah … A. 0,393 B. 0,865 C. 8,65 D. 57,3 E. 67,3
3. Sistem orde-0 merupakan sistem A. proporsional B. lag C. osilatori D. waktu mati E. integrator
4. Pada saat respon tekanan gas terhadap masukan step-input mencapai 63,2% dari maksimum ternyata diperlukan waktu 2 menit. Jadi tetapan waktu sistem adalah … A. 2 menit B. 1,632 menit C. 1 menit D. 0,632 menit E. 0,367 menit
5. Waktu mati adalah …
A. waktu tanpa respon B. waktu antara aksi dan reaksi C. waktu setelah ada respon D. waktu di antara aksi E. waktu di antara reaksi
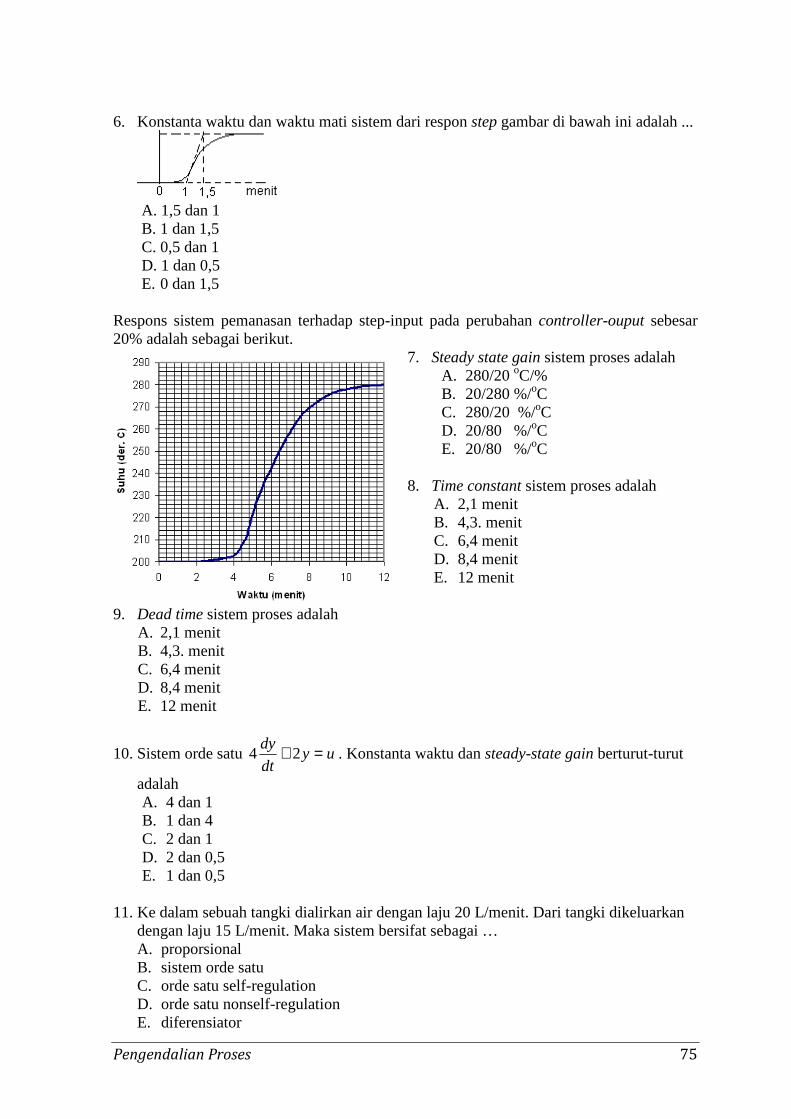
Pengendalian Proses 75
6. Konstanta waktu dan waktu mati sistem dari respon step gambar di bawah ini adalah ...
A. 1,5 dan 1 B. 1 dan 1,5 C. 0,5 dan 1 D. 1 dan 0,5 E. 0 dan 1,5
Respons sistem pemanasan terhadap step-input pada perubahan controller-ouput sebesar 20% adalah sebagai berikut.
7. Steady state gain sistem proses adalah A. 280/20 oC/% B. 20/280 %/oC C. 280/20 %/oC D. 20/80 %/oC E. 20/80 %/oC
8. Time constant sistem proses adalah
A. 2,1 menit B. 4,3. menit C. 6,4 menit D. 8,4 menit E. 12 menit
9. Dead time sistem proses adalah
A. 2,1 menit B. 4,3. menit C. 6,4 menit D. 8,4 menit E. 12 menit
10. Sistem orde satu uydt
dy =+ 24 . Konstanta waktu dan steady-state gain berturut-turut
adalah A. 4 dan 1 B. 1 dan 4 C. 2 dan 1 D. 2 dan 0,5 E. 1 dan 0,5
11. Ke dalam sebuah tangki dialirkan air dengan laju 20 L/menit. Dari tangki dikeluarkan
dengan laju 15 L/menit. Maka sistem bersifat sebagai … A. proporsional B. sistem orde satu C. orde satu self-regulation D. orde satu nonself-regulation E. diferensiator

Pengendalian Proses 76
12. Dari soal nomor (11), laju akumulasi dalam tangki adalah … A. + 20 L/menit B. - 20 L/menit C. + 5 L/menit D. -5 L/menit E. +15 L/menit
13. Respon underdamped terjadi jika … A. faktor redaman kurang dari 0 B. faktor redaman sama dengan 0 C. faktor redaman antara 0 dan 1 D. faktor redaman sama dengan 1 E. faktor redaman lebih dari 1
14. Sebuah pipa dengan luas penampang 5 cm2 mengalir air pada laju 25 cm3/menit. Pipa dilengkapi koil pemanas dan pada jarak 50 cm dari koil diletakkan sensor suhu. Waktu mati sistem ini adalah A. 1 menit B. 5 menit C. 10 menit D. 15 menit E. 20 menit
15. Masukan sistem tak mantap berubah sebesar 10 %. Setelah 2 menit keluaran sistem
berubah 40 %. Maka waktu integral sebesar … menit A. 2 B. 1 C. 0,5 D. 0,25 E. 0,1
16. Sistem tanpa regulasi diri mendapat perubahan masukan sebesar 10 %. Ternyata setelah 2 menit keluaran sistem mengalami perubahan sebesar 20 %. Maka waktu integral sistem tersebut adalah … menit A. 4 B. 2 C. 1 D. 0,5 E. 0,25
17. Sketsa step response di bawah ini adalah sistem ....
A. orde-0 B. orde satu C. orde dua D. integrator E. waktu mati
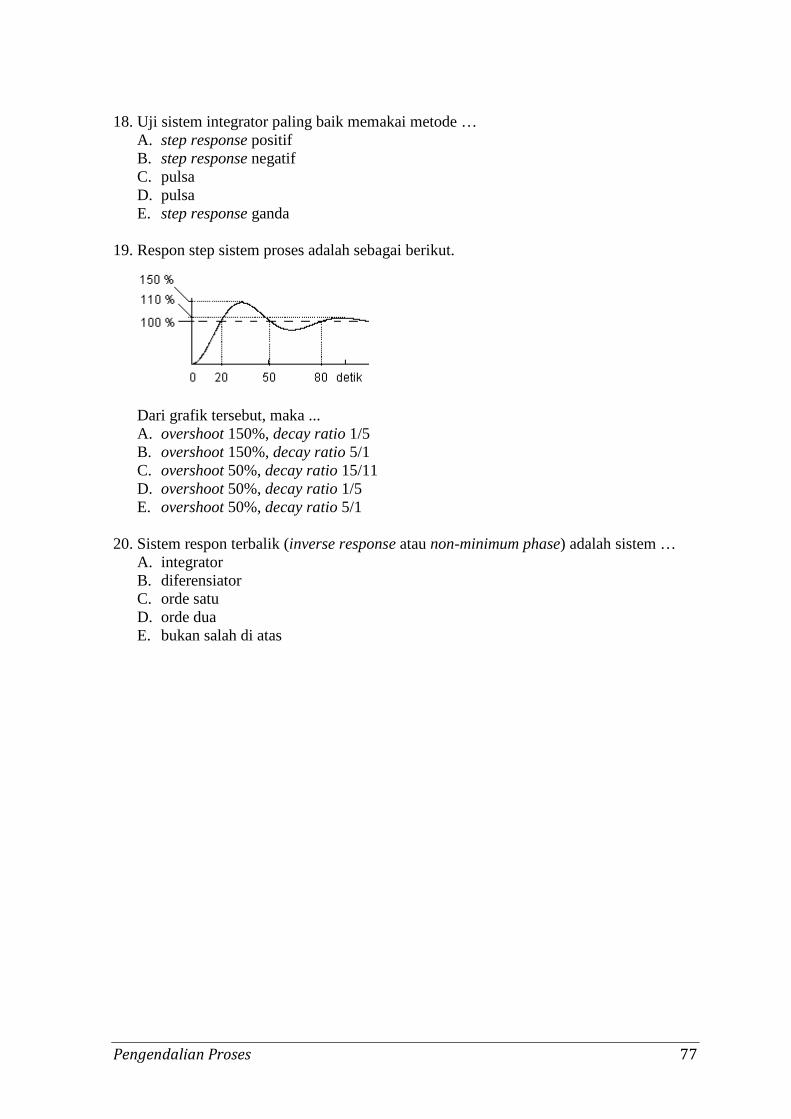
Pengendalian Proses 77
18. Uji sistem integrator paling baik memakai metode … A. step response positif B. step response negatif C. pulsa D. pulsa E. step response ganda
19. Respon step sistem proses adalah sebagai berikut.
Dari grafik tersebut, maka ... A. overshoot 150%, decay ratio 1/5 B. overshoot 150%, decay ratio 5/1 C. overshoot 50%, decay ratio 15/11 D. overshoot 50%, decay ratio 1/5 E. overshoot 50%, decay ratio 5/1
20. Sistem respon terbalik (inverse response atau non-minimum phase) adalah sistem …
A. integrator B. diferensiator C. orde satu D. orde dua E. bukan salah di atas
Pengendalian Proses 78
BAB-4 SISTEM PENGENDALIAN UMPAN BALIK
TUJUAN PEMBELAJARAN UMUM 1) Memahami prinsip kerja dan penerapan pengendali on-off, P, PI, dan PID. 2) Memilih mode pengendalian yang sesuai dengan proses. 3) Menentukan parameter pengendali berdasar karakteristik proses
TUJUAN PEMBELAJARAN KHUSUS Setelah menyelesaikan bab ini, mahasiswa diharapkan dapat: 1) Dapat menentukan cycling time dan differential gap pada pengendali on-off 2) Dapat menggambarkan respons pengendali on-off 3) Dapat menjelaskan keunggulan dan keterbatasan pengendali on-off 4) Dapat menjelaskan pengertian offset, PB, dan bias 5) Dapat menggambar respons pengendali P 6) Dapat menentukan lebar proportional band, bias,dan offset 7) Dapat menjelaskan keunggulan dan keterbatasan pengendali P 8) Dapat menjelaskan fungsi aksi integral dalam pengendali PI 9) Dapat menggambar respons pengendali PI 10) Dapat menentukan waktu integral secara grafis. 11) Menjelaskan kriteria redaman seperempat amplitudo. 12) Menghitung nilai PB pada pengendali proporsional sesuai kriteria redaman seperempat
amplitudo 13) Menentukan nilai IE, ISE, IAE, ITAE secara grafis 14) Menentukan gain (Kc), waktu integral (Ti), dan waktu derivatif (Td) dengan metode
trial and error, kurva reaksi, osilasi lingkar tertutup, dan respons frekuensi.
Pengendalian Proses 79
4.1 PROSES DENGAN PENGENDALIAN UMPAN BALIK Pengendalian terhadap proses berkaitan dengan kebutuhan untuk memperkecil pengaruh perubahan beban. Hal ini dilakukan dengan membuat hubungan antara sistem proses dan pengendali membentuk sistem lingkar tertutup (closed-loop system) atau disebut juga sistem pengendalian umpan balik (feedback control system). Antara sistem proses dan pengendali dihubungkan melalui unit pengukuran (sensor/transmiter) dan unit kendali akhir (biasanya berupa control valve).
Berdasar bentuk keluaran pengendali, sistem pengendalian umpan balik dibedakan menjadi pengendalian diskontinyu dan kontinyu. Termasuk kelompok pengendali diskontinyu adalah pengendali dua posisi. Sedangkan kelompok pengendali kontinyu adalah pengendali proporsional (P), proporsional-integral (PI), proporsional-integral-derivatif (PID) dan proporsional-derivatif (PD).
4.2 PENGENDALIAN DISKONTINYU 4.2.1 Pengendali Diskontinyu Dua Posisi Pengendali dua posisi, dahulu on-off, adalah jenis pengendali paling sederhana dan murah. Keluaran pengendali hanya memiliki dua kemungkinana nilai, yaitu maksimum (100%) atau minimum (0%). Secara matematik,
≥≤
=ay
byu
%;0
%;100 untuk aksi reverse acting (4.1)
≤≥
=ay
byu
%;0
%;100 untuk aksi direct acting (4.2)
dengan, u = nilai keluaran pengendali (%), y = nilai pengukuran (variabel proses), a = nilai batas atas variabel proses, b = nilai batas bawah variabel proses. 4.2.2 Pengendalian Dua Posisi Mekanisme pengendalian dua posisi mudah difahami bila ditinjau pengendalian tinggi air dalam tangki pada gambar 4.1. Air dalam tangki secara terus menerus dikeluarkan dengan laju tetap. Apabila permukaan air turun melebihi titik acuan (R), maka sensor tinggi air akan memberi sinyal bahwa telah terjadi penurunan permukaan air melebihi batas. Sinyal ini masuk ke pengendali dan pengendali memerintahkan pompa untuk bekerja. Dengan bekerjanya pompa, air akan masuk ke tangki dan permukaan air naik kembali. Pada saat tinggi air tepat mencapai R pompa berhenti sehingga terjadi pengosongan tangki, dan proses di atas berulang lagi. Siklus ini berlangsung terus
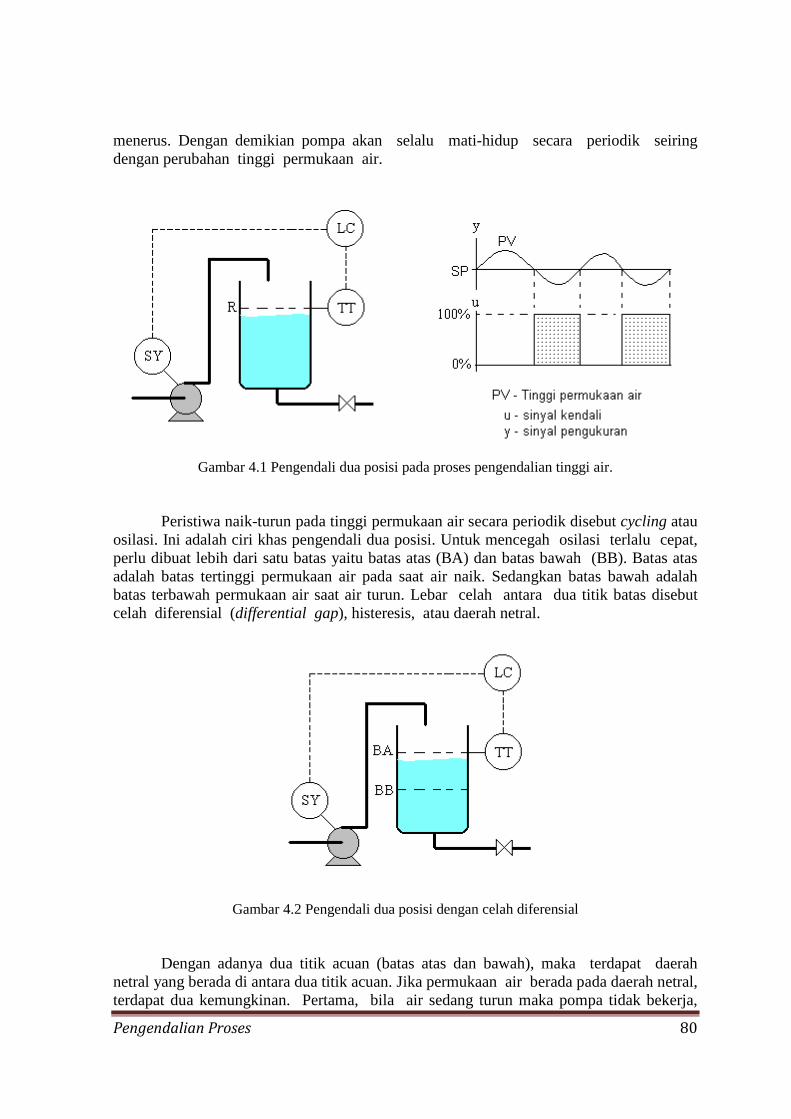
Pengendalian Proses 80
menerus. Dengan demikian pompa akan selalu mati-hidup secara periodik seiring dengan perubahan tinggi permukaan air.
Gambar 4.1 Pengendali dua posisi pada proses pengendalian tinggi air.
Peristiwa naik-turun pada tinggi permukaan air secara periodik disebut cycling atau osilasi. Ini adalah ciri khas pengendali dua posisi. Untuk mencegah osilasi terlalu cepat, perlu dibuat lebih dari satu batas yaitu batas atas (BA) dan batas bawah (BB). Batas atas adalah batas tertinggi permukaan air pada saat air naik. Sedangkan batas bawah adalah batas terbawah permukaan air saat air turun. Lebar celah antara dua titik batas disebut celah diferensial (differential gap), histeresis, atau daerah netral.
Gambar 4.2 Pengendali dua posisi dengan celah diferensial Dengan adanya dua titik acuan (batas atas dan bawah), maka terdapat daerah
netral yang berada di antara dua titik acuan. Jika permukaan air berada pada daerah netral, terdapat dua kemungkinan. Pertama, bila air sedang turun maka pompa tidak bekerja,
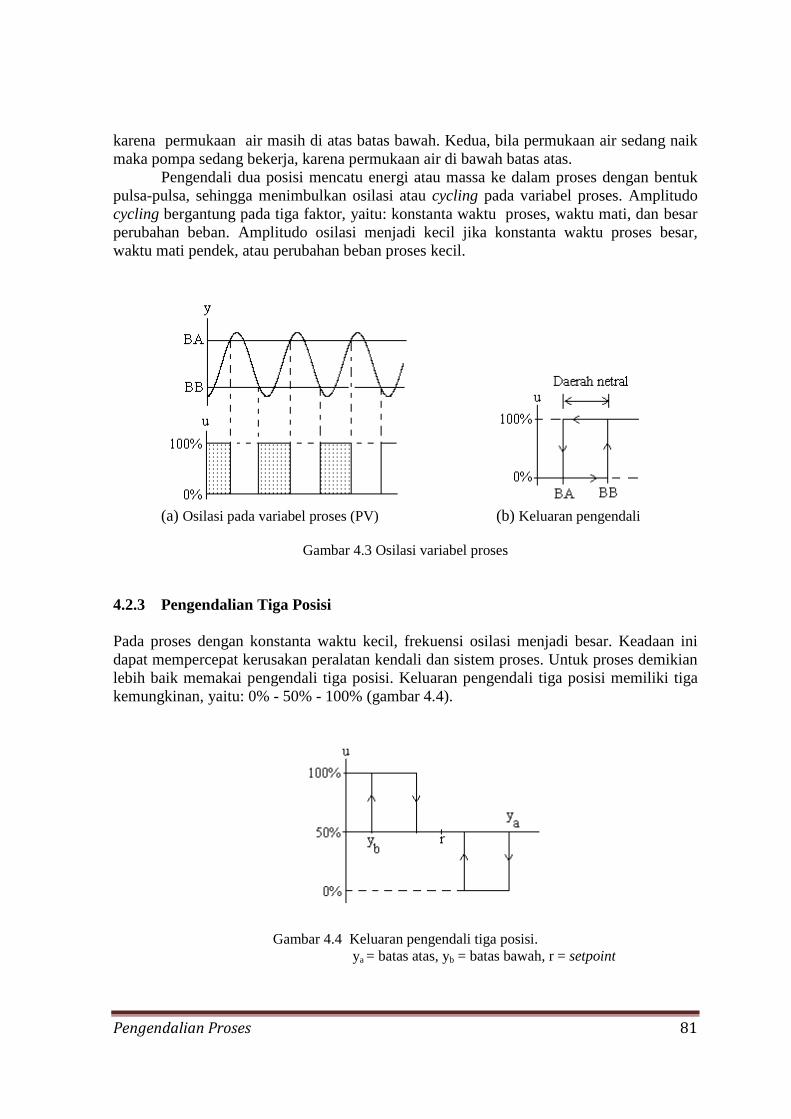
Pengendalian Proses 81
karena permukaan air masih di atas batas bawah. Kedua, bila permukaan air sedang naik maka pompa sedang bekerja, karena permukaan air di bawah batas atas.
Pengendali dua posisi mencatu energi atau massa ke dalam proses dengan bentuk pulsa-pulsa, sehingga menimbulkan osilasi atau cycling pada variabel proses. Amplitudo cycling bergantung pada tiga faktor, yaitu: konstanta waktu proses, waktu mati, dan besar perubahan beban. Amplitudo osilasi menjadi kecil jika konstanta waktu proses besar, waktu mati pendek, atau perubahan beban proses kecil.
(a) Osilasi pada variabel proses (PV) (b) Keluaran pengendali
Gambar 4.3 Osilasi variabel proses
4.2.3 Pengendalian Tiga Posisi Pada proses dengan konstanta waktu kecil, frekuensi osilasi menjadi besar. Keadaan ini dapat mempercepat kerusakan peralatan kendali dan sistem proses. Untuk proses demikian lebih baik memakai pengendali tiga posisi. Keluaran pengendali tiga posisi memiliki tiga kemungkinan, yaitu: 0% - 50% - 100% (gambar 4.4).
Gambar 4.4 Keluaran pengendali tiga posisi. ya = batas atas, yb = batas bawah, r = setpoint
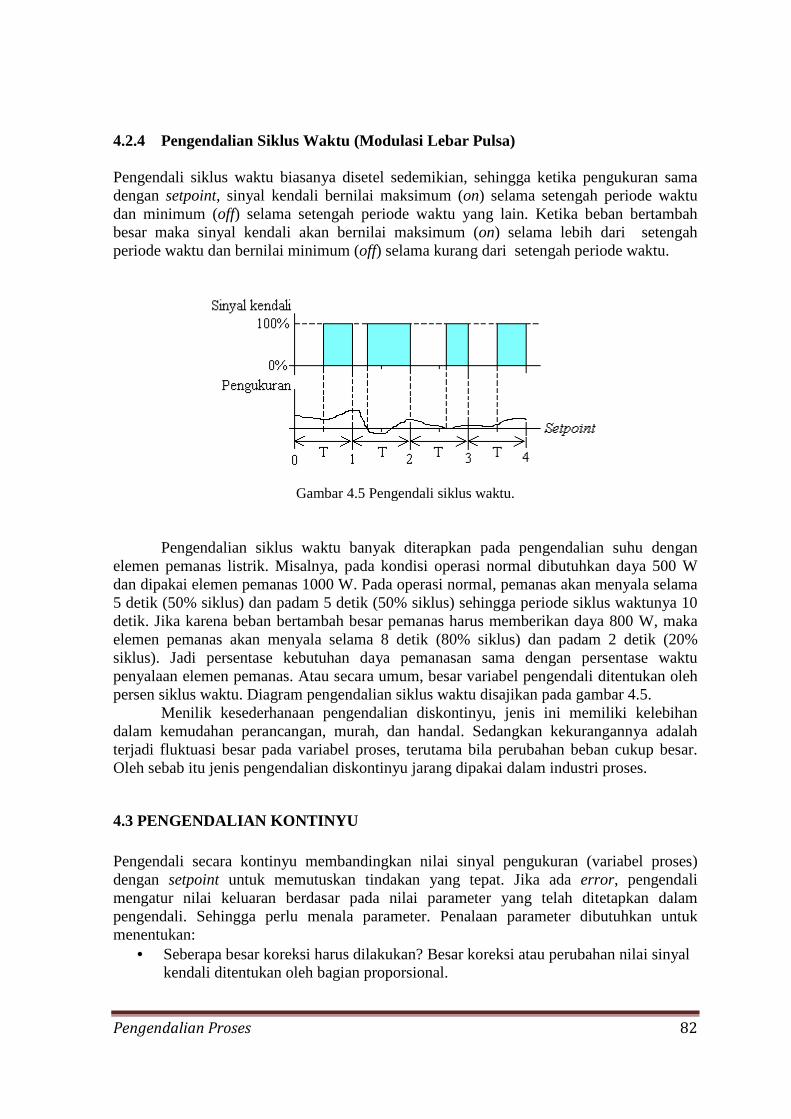
Pengendalian Proses 82
4.2.4 Pengendalian Siklus Waktu (Modulasi Lebar Pulsa) Pengendali siklus waktu biasanya disetel sedemikian, sehingga ketika pengukuran sama dengan setpoint, sinyal kendali bernilai maksimum (on) selama setengah periode waktu dan minimum (off) selama setengah periode waktu yang lain. Ketika beban bertambah besar maka sinyal kendali akan bernilai maksimum (on) selama lebih dari setengah periode waktu dan bernilai minimum (off) selama kurang dari setengah periode waktu.
Gambar 4.5 Pengendali siklus waktu. Pengendalian siklus waktu banyak diterapkan pada pengendalian suhu dengan
elemen pemanas listrik. Misalnya, pada kondisi operasi normal dibutuhkan daya 500 W dan dipakai elemen pemanas 1000 W. Pada operasi normal, pemanas akan menyala selama 5 detik (50% siklus) dan padam 5 detik (50% siklus) sehingga periode siklus waktunya 10 detik. Jika karena beban bertambah besar pemanas harus memberikan daya 800 W, maka elemen pemanas akan menyala selama 8 detik (80% siklus) dan padam 2 detik (20% siklus). Jadi persentase kebutuhan daya pemanasan sama dengan persentase waktu penyalaan elemen pemanas. Atau secara umum, besar variabel pengendali ditentukan oleh persen siklus waktu. Diagram pengendalian siklus waktu disajikan pada gambar 4.5.
Menilik kesederhanaan pengendalian diskontinyu, jenis ini memiliki kelebihan dalam kemudahan perancangan, murah, dan handal. Sedangkan kekurangannya adalah terjadi fluktuasi besar pada variabel proses, terutama bila perubahan beban cukup besar. Oleh sebab itu jenis pengendalian diskontinyu jarang dipakai dalam industri proses.
4.3 PENGENDALIAN KONTINYU Pengendali secara kontinyu membandingkan nilai sinyal pengukuran (variabel proses) dengan setpoint untuk memutuskan tindakan yang tepat. Jika ada error, pengendali mengatur nilai keluaran berdasar pada nilai parameter yang telah ditetapkan dalam pengendali. Sehingga perlu menala parameter. Penalaan parameter dibutuhkan untuk menentukan:
• Seberapa besar koreksi harus dilakukan? Besar koreksi atau perubahan nilai sinyal kendali ditentukan oleh bagian proporsional.
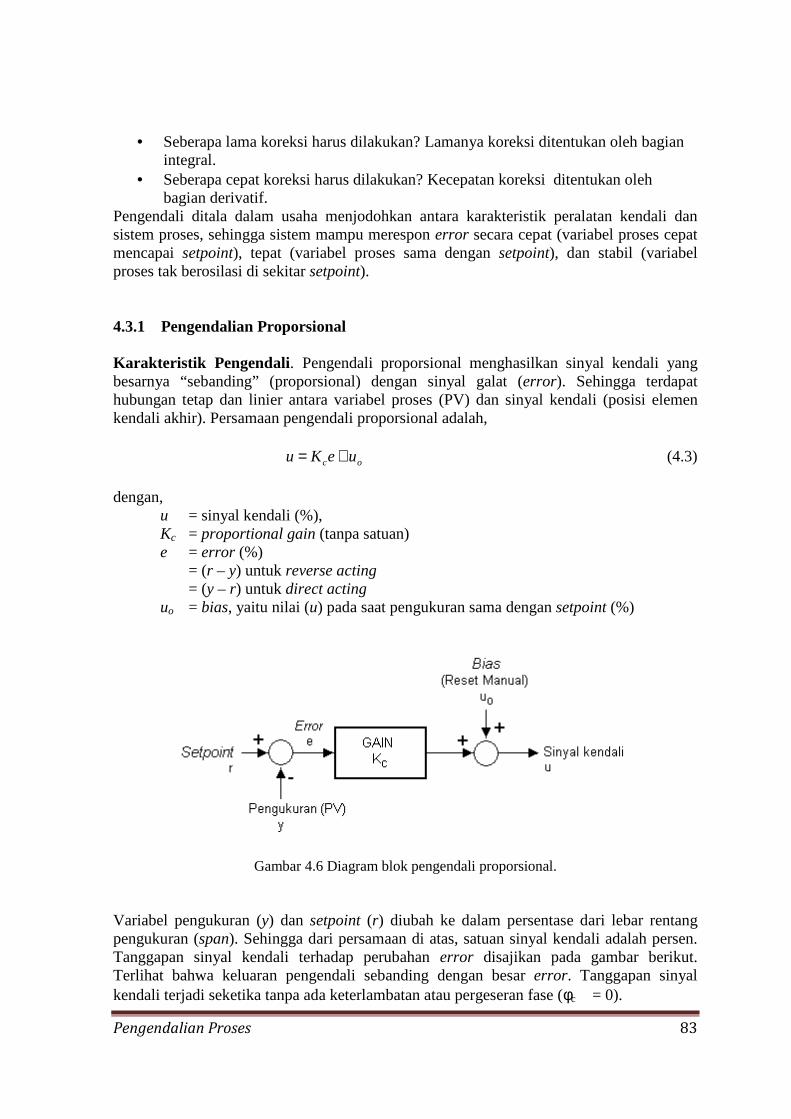
Pengendalian Proses 83
• Seberapa lama koreksi harus dilakukan? Lamanya koreksi ditentukan oleh bagian integral.
• Seberapa cepat koreksi harus dilakukan? Kecepatan koreksi ditentukan oleh bagian derivatif.
Pengendali ditala dalam usaha menjodohkan antara karakteristik peralatan kendali dan sistem proses, sehingga sistem mampu merespon error secara cepat (variabel proses cepat mencapai setpoint), tepat (variabel proses sama dengan setpoint), dan stabil (variabel proses tak berosilasi di sekitar setpoint). 4.3.1 Pengendalian Proporsional Karakteristik Pengendali. Pengendali proporsional menghasilkan sinyal kendali yang besarnya “sebanding” (proporsional) dengan sinyal galat (error). Sehingga terdapat hubungan tetap dan linier antara variabel proses (PV) dan sinyal kendali (posisi elemen kendali akhir). Persamaan pengendali proporsional adalah,
oc ueKu += (4.3)
dengan, u = sinyal kendali (%), Kc = proportional gain (tanpa satuan) e = error (%) = (r – y) untuk reverse acting = (y – r) untuk direct acting uo = bias, yaitu nilai (u) pada saat pengukuran sama dengan setpoint (%)
Gambar 4.6 Diagram blok pengendali proporsional. Variabel pengukuran (y) dan setpoint (r) diubah ke dalam persentase dari lebar rentang pengukuran (span). Sehingga dari persamaan di atas, satuan sinyal kendali adalah persen. Tanggapan sinyal kendali terhadap perubahan error disajikan pada gambar berikut. Terlihat bahwa keluaran pengendali sebanding dengan besar error. Tanggapan sinyal kendali terjadi seketika tanpa ada keterlambatan atau pergeseran fase (φc� = 0).
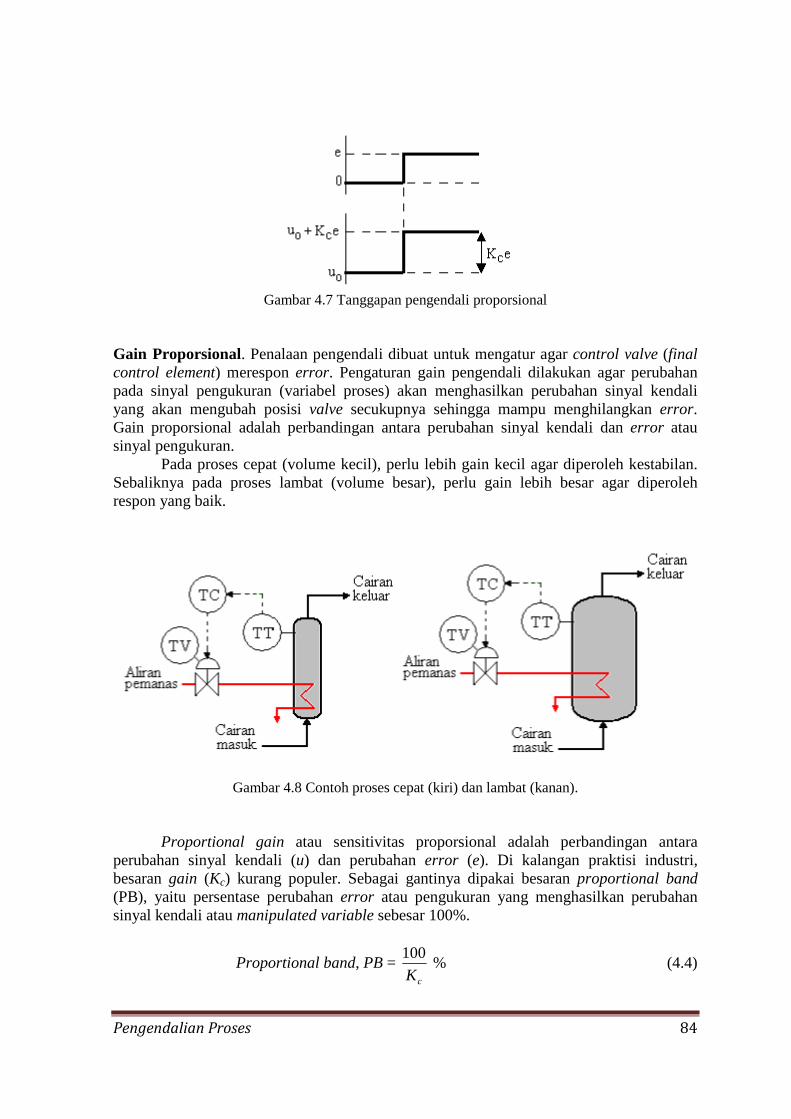
Pengendalian Proses 84
Gambar 4.7 Tanggapan pengendali proporsional Gain Proporsional. Penalaan pengendali dibuat untuk mengatur agar control valve (final control element) merespon error. Pengaturan gain pengendali dilakukan agar perubahan pada sinyal pengukuran (variabel proses) akan menghasilkan perubahan sinyal kendali yang akan mengubah posisi valve secukupnya sehingga mampu menghilangkan error. Gain proporsional adalah perbandingan antara perubahan sinyal kendali dan error atau sinyal pengukuran.
Pada proses cepat (volume kecil), perlu lebih gain kecil agar diperoleh kestabilan. Sebaliknya pada proses lambat (volume besar), perlu gain lebih besar agar diperoleh respon yang baik.
Gambar 4.8 Contoh proses cepat (kiri) dan lambat (kanan).
Proportional gain atau sensitivitas proporsional adalah perbandingan antara perubahan sinyal kendali (u) dan perubahan error (e). Di kalangan praktisi industri, besaran gain (Kc) kurang populer. Sebagai gantinya dipakai besaran proportional band (PB), yaitu persentase perubahan error atau pengukuran yang menghasilkan perubahan sinyal kendali atau manipulated variable sebesar 100%.
Proportional band, PB = cK
100 % (4.4)
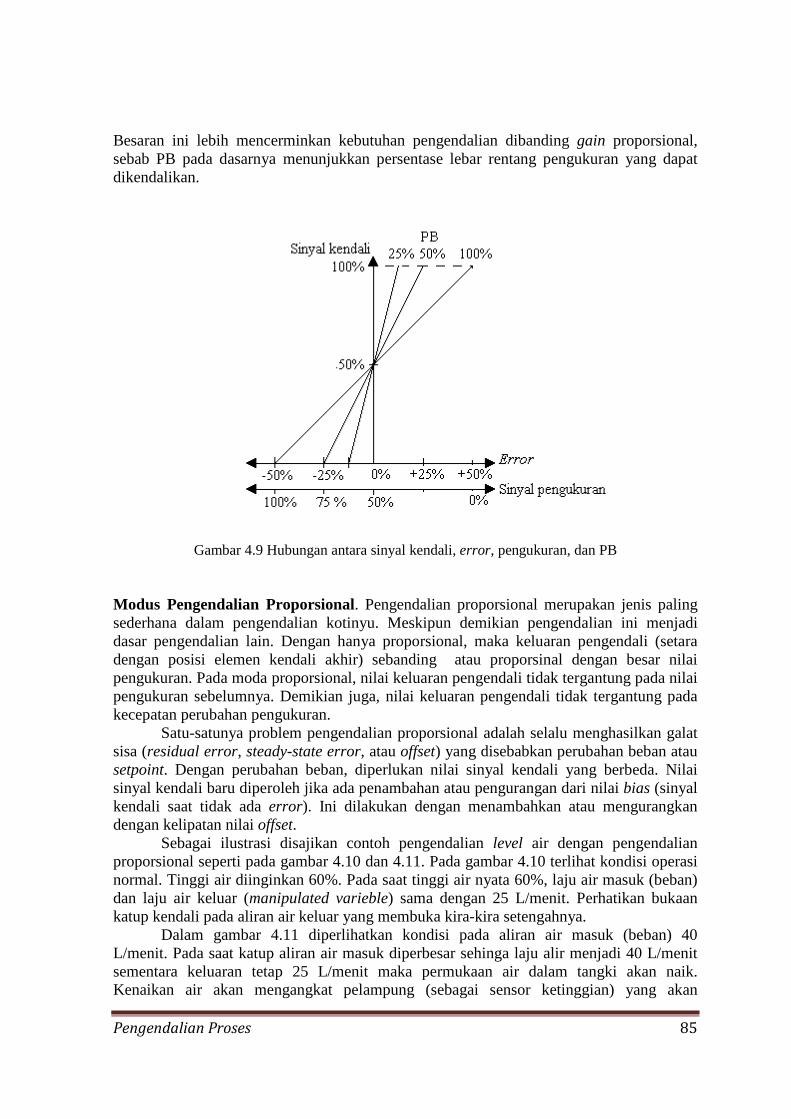
Pengendalian Proses 85
Besaran ini lebih mencerminkan kebutuhan pengendalian dibanding gain proporsional, sebab PB pada dasarnya menunjukkan persentase lebar rentang pengukuran yang dapat dikendalikan.
Gambar 4.9 Hubungan antara sinyal kendali, error, pengukuran, dan PB Modus Pengendalian Proporsional. Pengendalian proporsional merupakan jenis paling sederhana dalam pengendalian kotinyu. Meskipun demikian pengendalian ini menjadi dasar pengendalian lain. Dengan hanya proporsional, maka keluaran pengendali (setara dengan posisi elemen kendali akhir) sebanding atau proporsinal dengan besar nilai pengukuran. Pada moda proporsional, nilai keluaran pengendali tidak tergantung pada nilai pengukuran sebelumnya. Demikian juga, nilai keluaran pengendali tidak tergantung pada kecepatan perubahan pengukuran.
Satu-satunya problem pengendalian proporsional adalah selalu menghasilkan galat sisa (residual error, steady-state error, atau offset) yang disebabkan perubahan beban atau setpoint. Dengan perubahan beban, diperlukan nilai sinyal kendali yang berbeda. Nilai sinyal kendali baru diperoleh jika ada penambahan atau pengurangan dari nilai bias (sinyal kendali saat tidak ada error). Ini dilakukan dengan menambahkan atau mengurangkan dengan kelipatan nilai offset.
Sebagai ilustrasi disajikan contoh pengendalian level air dengan pengendalian proporsional seperti pada gambar 4.10 dan 4.11. Pada gambar 4.10 terlihat kondisi operasi normal. Tinggi air diinginkan 60%. Pada saat tinggi air nyata 60%, laju air masuk (beban) dan laju air keluar (manipulated varieble) sama dengan 25 L/menit. Perhatikan bukaan katup kendali pada aliran air keluar yang membuka kira-kira setengahnya. Dalam gambar 4.11 diperlihatkan kondisi pada aliran air masuk (beban) 40 L/menit. Pada saat katup aliran air masuk diperbesar sehinga laju alir menjadi 40 L/menit sementara keluaran tetap 25 L/menit maka permukaan air dalam tangki akan naik. Kenaikan air akan mengangkat pelampung (sebagai sensor ketinggian) yang akan
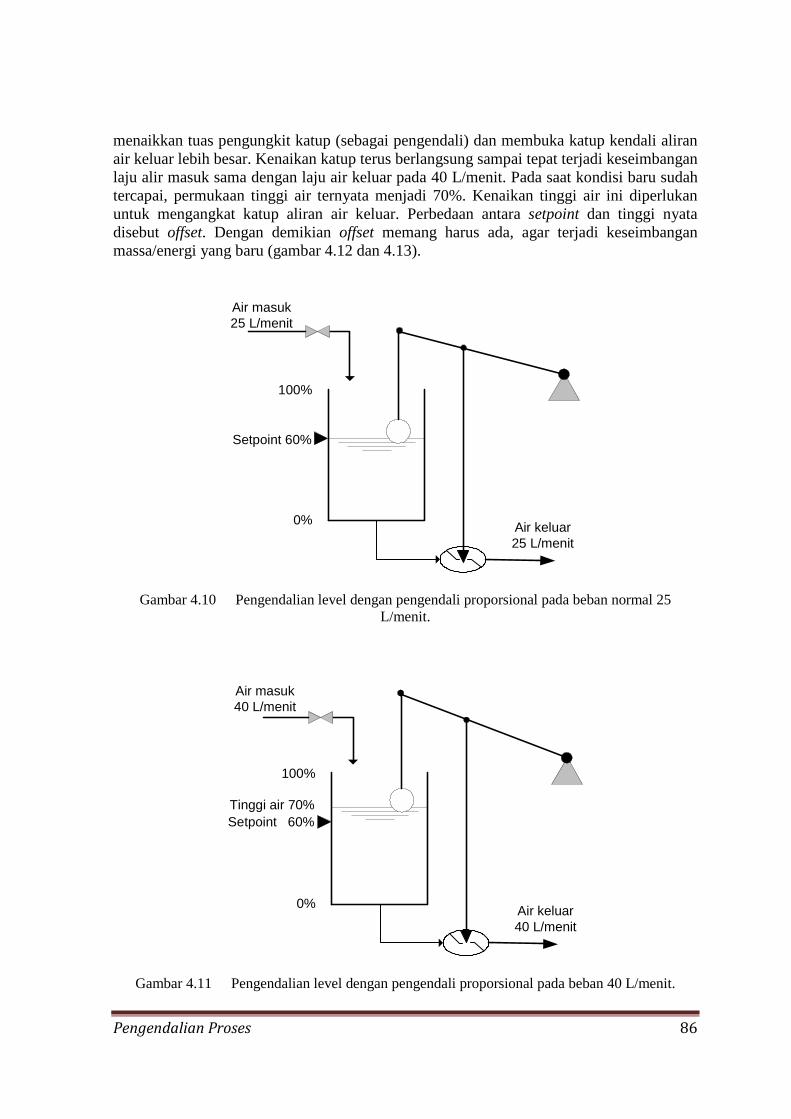
Pengendalian Proses 86
menaikkan tuas pengungkit katup (sebagai pengendali) dan membuka katup kendali aliran air keluar lebih besar. Kenaikan katup terus berlangsung sampai tepat terjadi keseimbangan laju alir masuk sama dengan laju air keluar pada 40 L/menit. Pada saat kondisi baru sudah tercapai, permukaan tinggi air ternyata menjadi 70%. Kenaikan tinggi air ini diperlukan untuk mengangkat katup aliran air keluar. Perbedaan antara setpoint dan tinggi nyata disebut offset. Dengan demikian offset memang harus ada, agar terjadi keseimbangan massa/energi yang baru (gambar 4.12 dan 4.13).
Setpoint 60%
Air masuk25 L/menit
Air keluar25 L/menit
100%
0%
Gambar 4.10 Pengendalian level dengan pengendali proporsional pada beban normal 25 L/menit.
Setpoint 60%
Air masuk40 L/menit
Air keluar40 L/menit
100%
0%
Tinggi air 70%
Gambar 4.11 Pengendalian level dengan pengendali proporsional pada beban 40 L/menit.
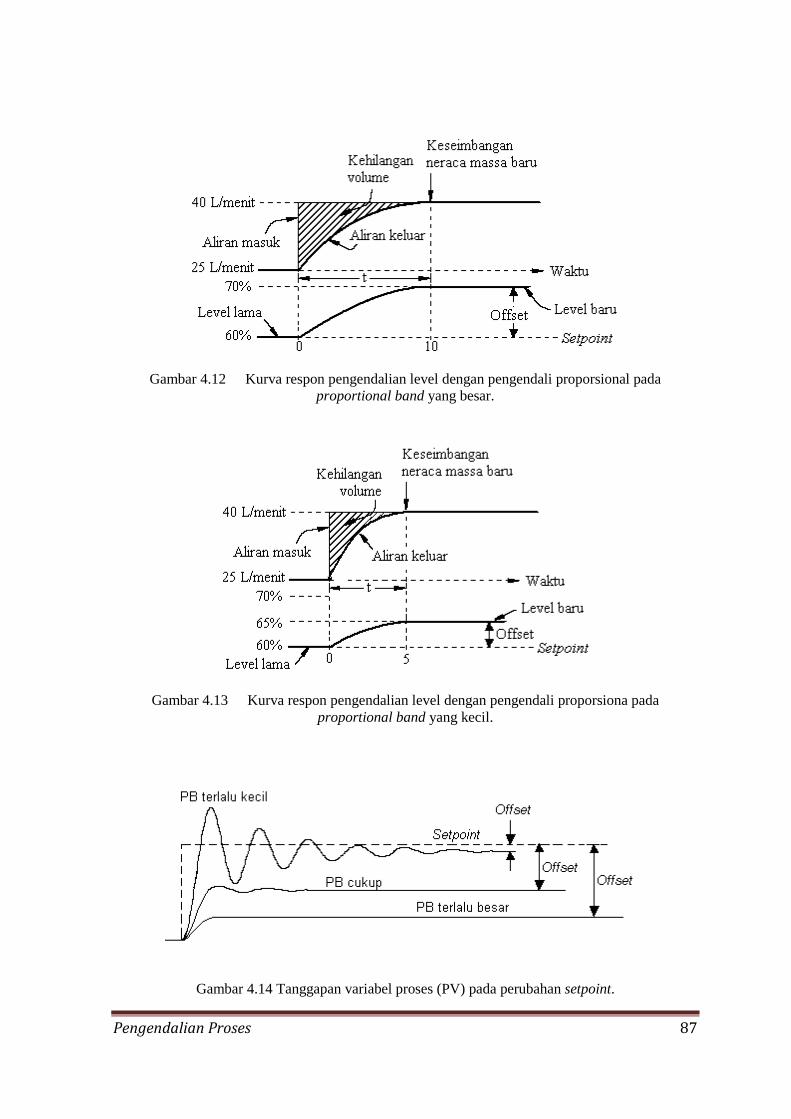
Pengendalian Proses 87
Gambar 4.12 Kurva respon pengendalian level dengan pengendali proporsional pada proportional band yang besar.
Gambar 4.13 Kurva respon pengendalian level dengan pengendali proporsiona pada proportional band yang kecil.
Gambar 4.14 Tanggapan variabel proses (PV) pada perubahan setpoint.
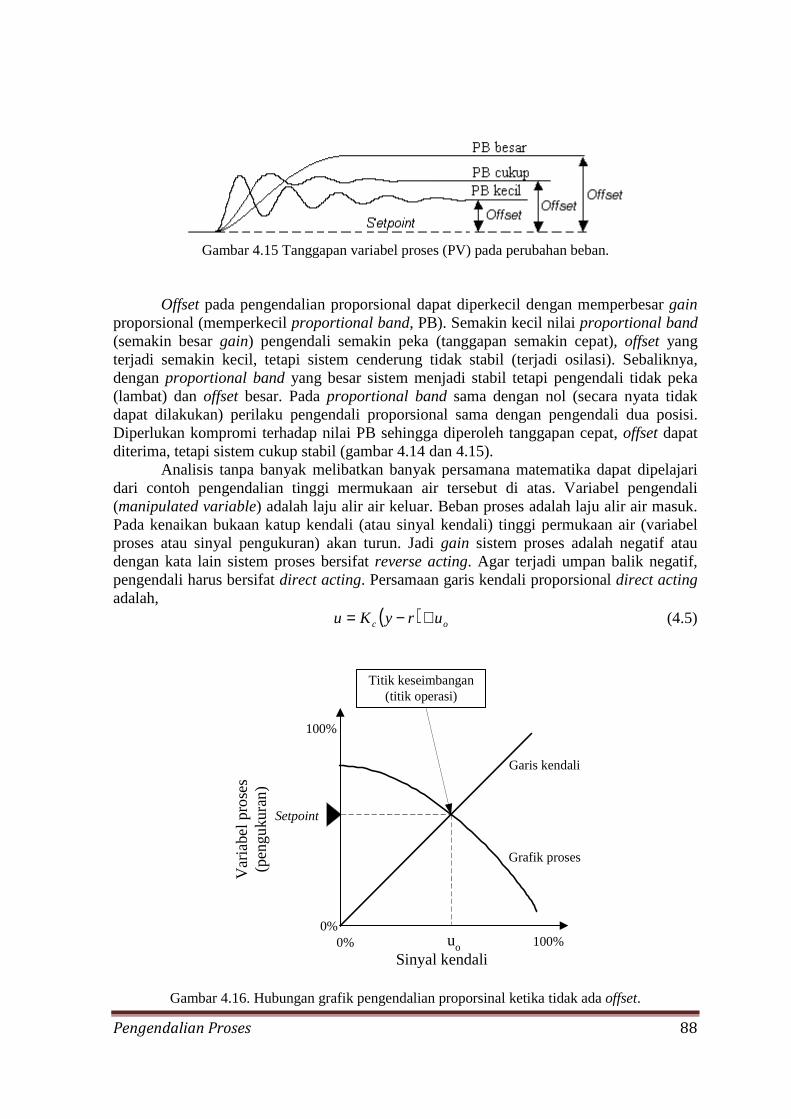
Pengendalian Proses 88
Gambar 4.15 Tanggapan variabel proses (PV) pada perubahan beban.
Offset pada pengendalian proporsional dapat diperkecil dengan memperbesar gain proporsional (memperkecil proportional band, PB). Semakin kecil nilai proportional band (semakin besar gain) pengendali semakin peka (tanggapan semakin cepat), offset yang terjadi semakin kecil, tetapi sistem cenderung tidak stabil (terjadi osilasi). Sebaliknya, dengan proportional band yang besar sistem menjadi stabil tetapi pengendali tidak peka (lambat) dan offset besar. Pada proportional band sama dengan nol (secara nyata tidak dapat dilakukan) perilaku pengendali proporsional sama dengan pengendali dua posisi. Diperlukan kompromi terhadap nilai PB sehingga diperoleh tanggapan cepat, offset dapat diterima, tetapi sistem cukup stabil (gambar 4.14 dan 4.15). Analisis tanpa banyak melibatkan banyak persamana matematika dapat dipelajari dari contoh pengendalian tinggi mermukaan air tersebut di atas. Variabel pengendali (manipulated variable) adalah laju alir air keluar. Beban proses adalah laju alir air masuk. Pada kenaikan bukaan katup kendali (atau sinyal kendali) tinggi permukaan air (variabel proses atau sinyal pengukuran) akan turun. Jadi gain sistem proses adalah negatif atau dengan kata lain sistem proses bersifat reverse acting. Agar terjadi umpan balik negatif, pengendali harus bersifat direct acting. Persamaan garis kendali proporsional direct acting adalah,
( ) oc uryKu +−= (4.5)
Titik keseimbangan(titik operasi)
Va
riabe
l pro
ses
(pen
guku
ran
)
uoSinyal kendali
100%
0%100%0%
Setpoint
Garis kendali
Grafik proses
Gambar 4.16. Hubungan grafik pengendalian proporsinal ketika tidak ada offset.
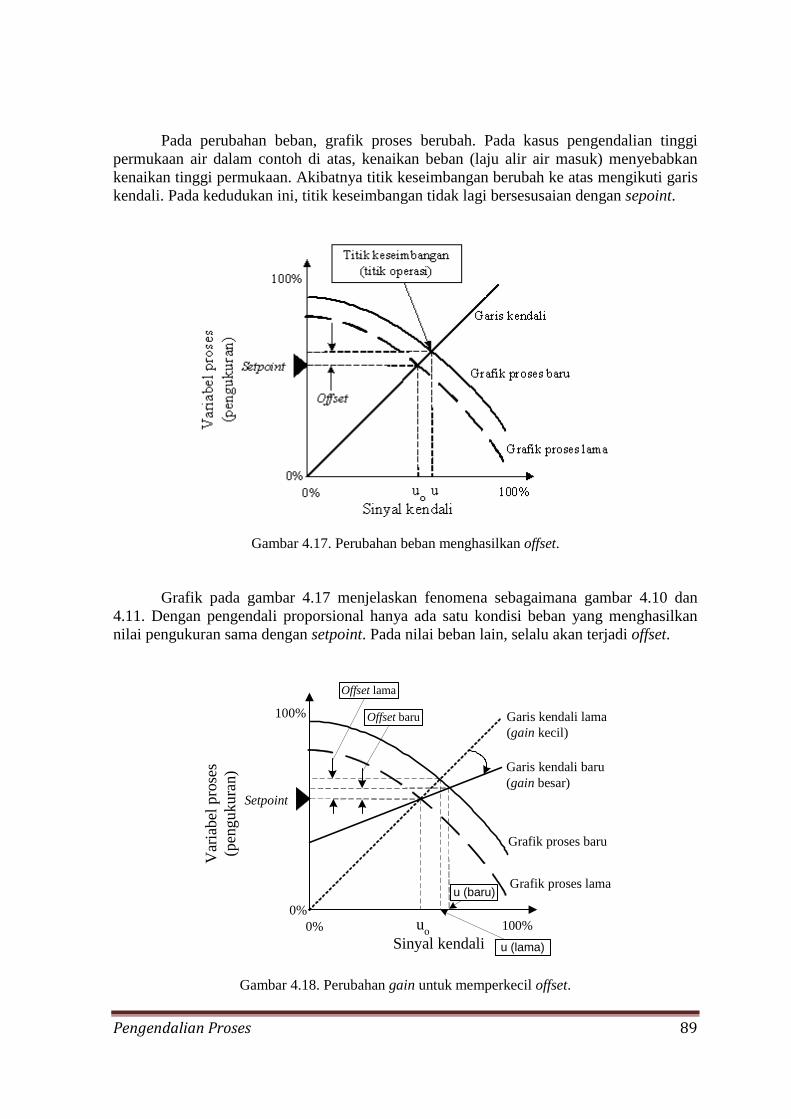
Pengendalian Proses 89
Pada perubahan beban, grafik proses berubah. Pada kasus pengendalian tinggi permukaan air dalam contoh di atas, kenaikan beban (laju alir air masuk) menyebabkan kenaikan tinggi permukaan. Akibatnya titik keseimbangan berubah ke atas mengikuti garis kendali. Pada kedudukan ini, titik keseimbangan tidak lagi bersesusaian dengan sepoint.
Gambar 4.17. Perubahan beban menghasilkan offset. Grafik pada gambar 4.17 menjelaskan fenomena sebagaimana gambar 4.10 dan
4.11. Dengan pengendali proporsional hanya ada satu kondisi beban yang menghasilkan nilai pengukuran sama dengan setpoint. Pada nilai beban lain, selalu akan terjadi offset.
Offset baru
Offset lama
u (baru)
u (lama)
Var
iabe
l pro
ses
(pen
guku
ran)
uo Sinyal kendali
100%
0%100%0%
Setpoint
Garis kendali lama(gain kecil)
Grafik proses baru
Grafik proses lama
Garis kendali baru(gain besar)
Gambar 4.18. Perubahan gain untuk memperkecil offset.
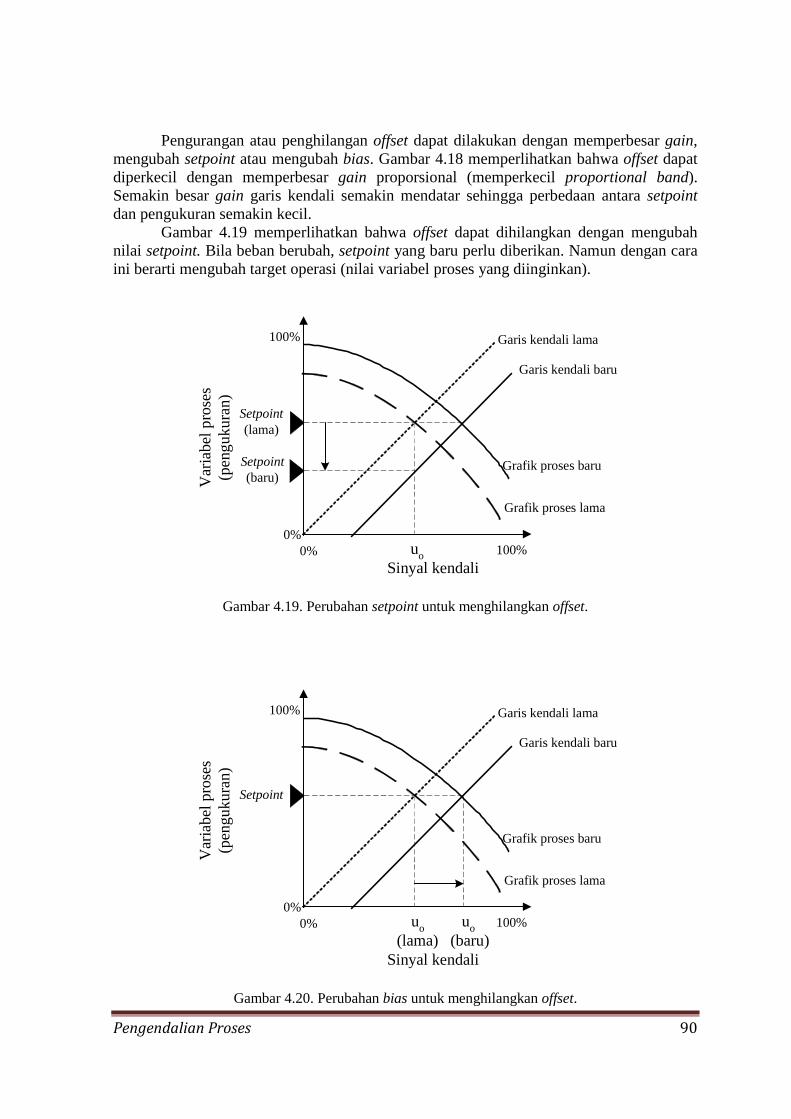
Pengendalian Proses 90
Pengurangan atau penghilangan offset dapat dilakukan dengan memperbesar gain, mengubah setpoint atau mengubah bias. Gambar 4.18 memperlihatkan bahwa offset dapat diperkecil dengan memperbesar gain proporsional (memperkecil proportional band). Semakin besar gain garis kendali semakin mendatar sehingga perbedaan antara setpoint dan pengukuran semakin kecil. Gambar 4.19 memperlihatkan bahwa offset dapat dihilangkan dengan mengubah nilai setpoint. Bila beban berubah, setpoint yang baru perlu diberikan. Namun dengan cara ini berarti mengubah target operasi (nilai variabel proses yang diinginkan).
Var
iabe
l pro
ses
(pe
nguk
ura
n)
uo Sinyal kendali
100%
0%100%0%
Setpoint(lama)
Grafik proses baru
Grafik proses lama
Setpoint(baru)
Garis kendali lama
Garis kendali baru
Gambar 4.19. Perubahan setpoint untuk menghilangkan offset.
Var
iabe
l pro
ses
(pen
guku
ran)
uo uo (lama) (baru)
Sinyal kendali
100%
0%100%0%
Setpoint
Grafik proses baru
Grafik proses lama
Garis kendali lama
Garis kendali baru
Gambar 4.20. Perubahan bias untuk menghilangkan offset.
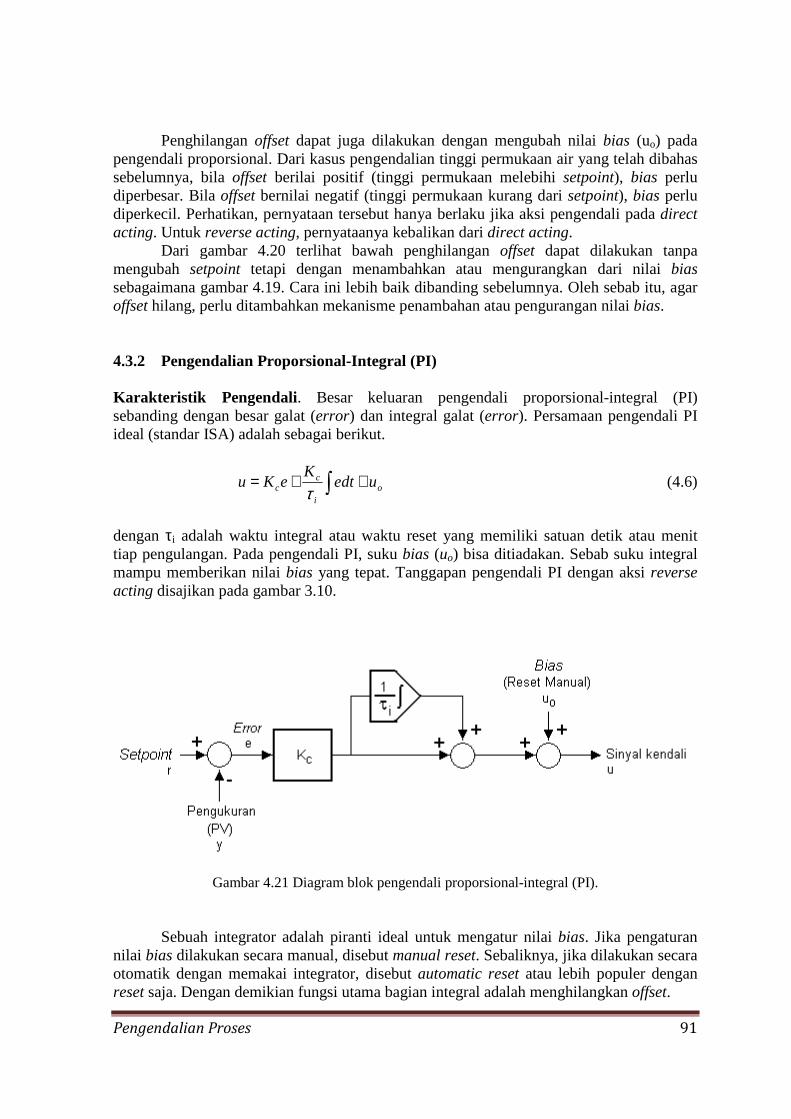
Pengendalian Proses 91
Penghilangan offset dapat juga dilakukan dengan mengubah nilai bias (uo) pada pengendali proporsional. Dari kasus pengendalian tinggi permukaan air yang telah dibahas sebelumnya, bila offset berilai positif (tinggi permukaan melebihi setpoint), bias perlu diperbesar. Bila offset bernilai negatif (tinggi permukaan kurang dari setpoint), bias perlu diperkecil. Perhatikan, pernyataan tersebut hanya berlaku jika aksi pengendali pada direct acting. Untuk reverse acting, pernyataanya kebalikan dari direct acting.
Dari gambar 4.20 terlihat bawah penghilangan offset dapat dilakukan tanpa mengubah setpoint tetapi dengan menambahkan atau mengurangkan dari nilai bias sebagaimana gambar 4.19. Cara ini lebih baik dibanding sebelumnya. Oleh sebab itu, agar offset hilang, perlu ditambahkan mekanisme penambahan atau pengurangan nilai bias. 4.3.2 Pengendalian Proporsional-Integral (PI) Karakteristik Pengendali. Besar keluaran pengendali proporsional-integral (PI) sebanding dengan besar galat (error) dan integral galat (error). Persamaan pengendali PI ideal (standar ISA) adalah sebagai berikut.
oi
cc udte
KeKu ++= ∫τ
(4.6)
dengan τi adalah waktu integral atau waktu reset yang memiliki satuan detik atau menit tiap pengulangan. Pada pengendali PI, suku bias (uo) bisa ditiadakan. Sebab suku integral mampu memberikan nilai bias yang tepat. Tanggapan pengendali PI dengan aksi reverse acting disajikan pada gambar 3.10.
Gambar 4.21 Diagram blok pengendali proporsional-integral (PI).
Sebuah integrator adalah piranti ideal untuk mengatur nilai bias. Jika pengaturan nilai bias dilakukan secara manual, disebut manual reset. Sebaliknya, jika dilakukan secara otomatik dengan memakai integrator, disebut automatic reset atau lebih populer dengan reset saja. Dengan demikian fungsi utama bagian integral adalah menghilangkan offset.
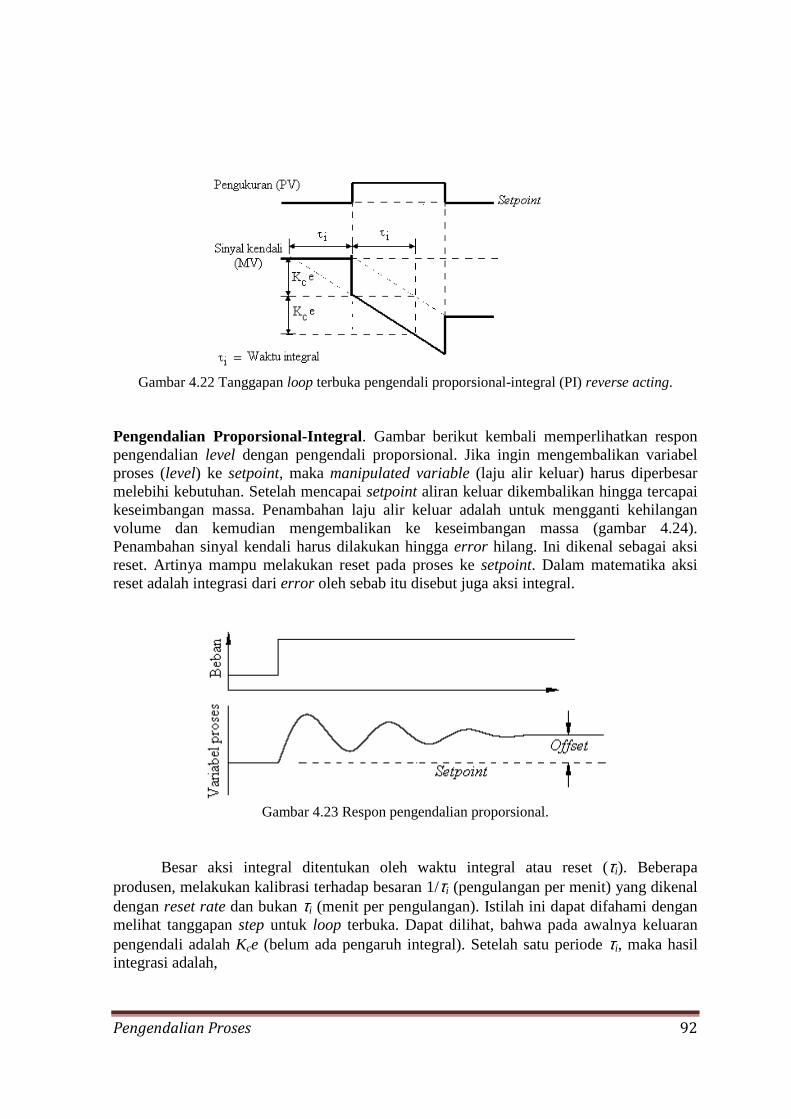
Pengendalian Proses 92
Gambar 4.22 Tanggapan loop terbuka pengendali proporsional-integral (PI) reverse acting.
Pengendalian Proporsional-Integral. Gambar berikut kembali memperlihatkan respon pengendalian level dengan pengendali proporsional. Jika ingin mengembalikan variabel proses (level) ke setpoint, maka manipulated variable (laju alir keluar) harus diperbesar melebihi kebutuhan. Setelah mencapai setpoint aliran keluar dikembalikan hingga tercapai keseimbangan massa. Penambahan laju alir keluar adalah untuk mengganti kehilangan volume dan kemudian mengembalikan ke keseimbangan massa (gambar 4.24). Penambahan sinyal kendali harus dilakukan hingga error hilang. Ini dikenal sebagai aksi reset. Artinya mampu melakukan reset pada proses ke setpoint. Dalam matematika aksi reset adalah integrasi dari error oleh sebab itu disebut juga aksi integral.
Gambar 4.23 Respon pengendalian proporsional.
Besar aksi integral ditentukan oleh waktu integral atau reset (τi). Beberapa produsen, melakukan kalibrasi terhadap besaran 1/τi (pengulangan per menit) yang dikenal dengan reset rate dan bukan τi (menit per pengulangan). Istilah ini dapat difahami dengan melihat tanggapan step untuk loop terbuka. Dapat dilihat, bahwa pada awalnya keluaran pengendali adalah Kce (belum ada pengaruh integral). Setelah satu periode τi, maka hasil integrasi adalah,
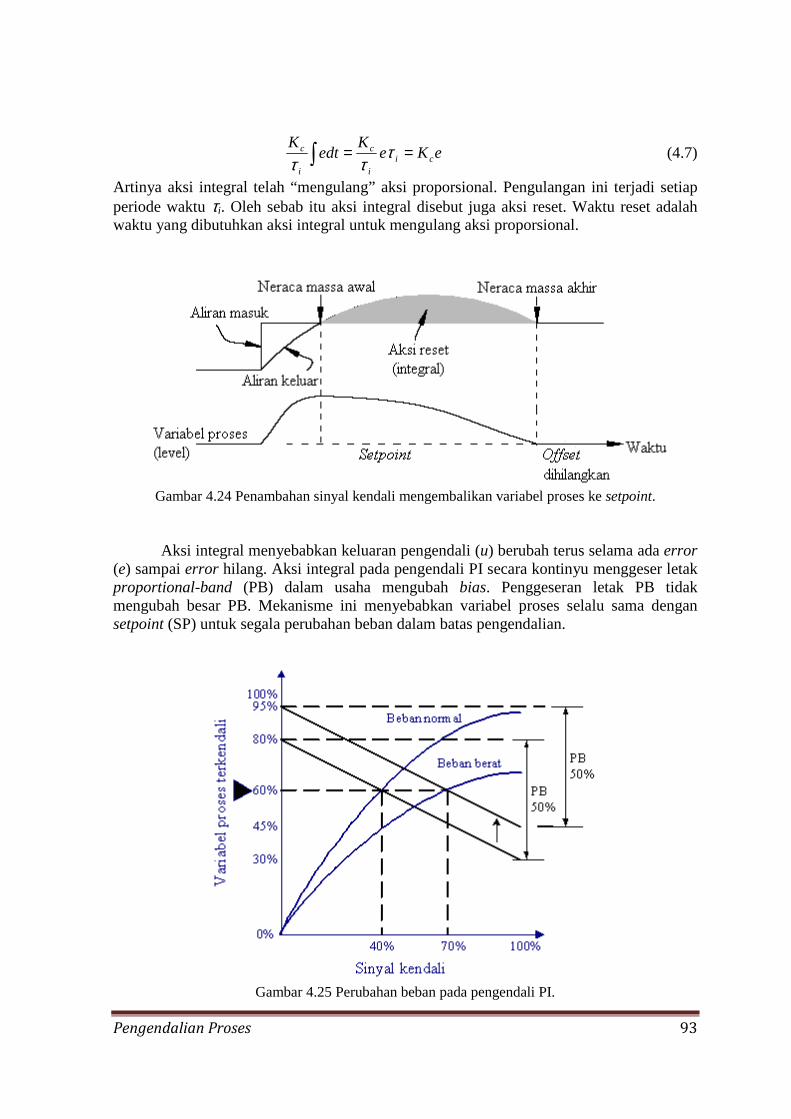
Pengendalian Proses 93
eKeK
dteK
cii
c
i
c ==∫ τττ
(4.7)
Artinya aksi integral telah “mengulang” aksi proporsional. Pengulangan ini terjadi setiap periode waktu τi. Oleh sebab itu aksi integral disebut juga aksi reset. Waktu reset adalah waktu yang dibutuhkan aksi integral untuk mengulang aksi proporsional.
Gambar 4.24 Penambahan sinyal kendali mengembalikan variabel proses ke setpoint.
Aksi integral menyebabkan keluaran pengendali (u) berubah terus selama ada error (e) sampai error hilang. Aksi integral pada pengendali PI secara kontinyu menggeser letak proportional-band (PB) dalam usaha mengubah bias. Penggeseran letak PB tidak mengubah besar PB. Mekanisme ini menyebabkan variabel proses selalu sama dengan setpoint (SP) untuk segala perubahan beban dalam batas pengendalian.
Gambar 4.25 Perubahan beban pada pengendali PI.
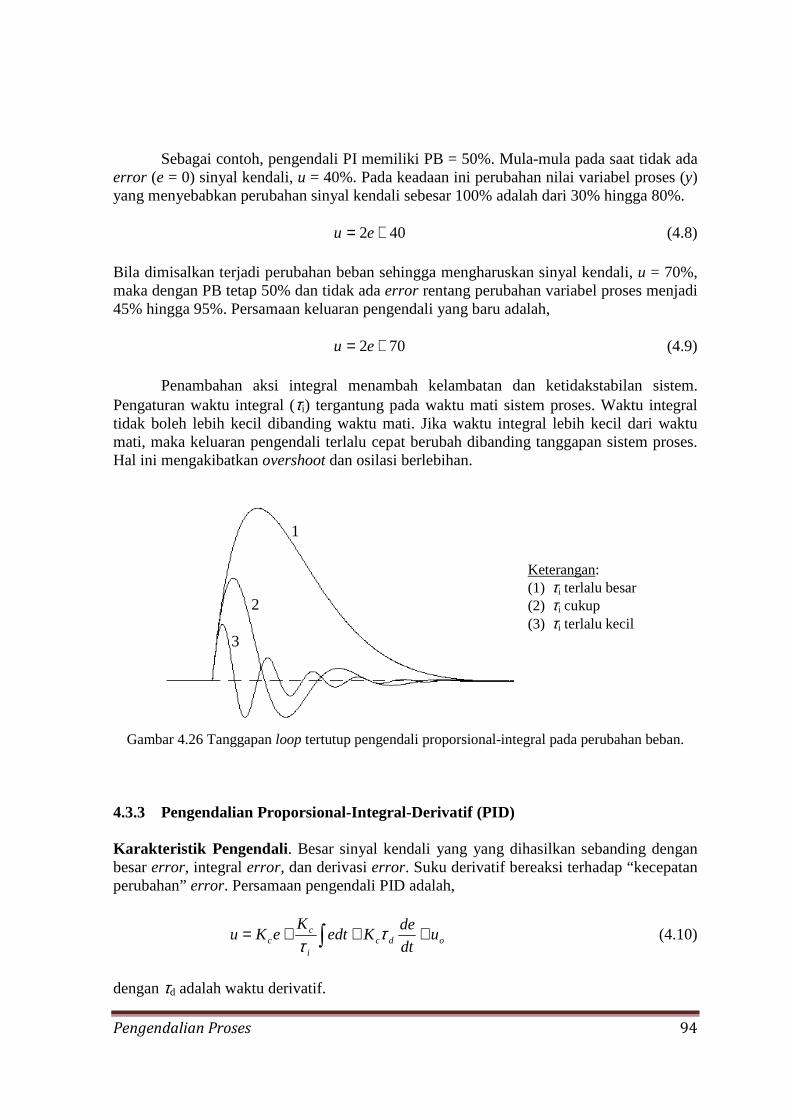
Pengendalian Proses 94
Sebagai contoh, pengendali PI memiliki PB = 50%. Mula-mula pada saat tidak ada error (e = 0) sinyal kendali, u = 40%. Pada keadaan ini perubahan nilai variabel proses (y) yang menyebabkan perubahan sinyal kendali sebesar 100% adalah dari 30% hingga 80%.
402 += eu (4.8)
Bila dimisalkan terjadi perubahan beban sehingga mengharuskan sinyal kendali, u = 70%, maka dengan PB tetap 50% dan tidak ada error rentang perubahan variabel proses menjadi 45% hingga 95%. Persamaan keluaran pengendali yang baru adalah,
702 += eu (4.9) Penambahan aksi integral menambah kelambatan dan ketidakstabilan sistem.
Pengaturan waktu integral (τi) tergantung pada waktu mati sistem proses. Waktu integral tidak boleh lebih kecil dibanding waktu mati. Jika waktu integral lebih kecil dari waktu mati, maka keluaran pengendali terlalu cepat berubah dibanding tanggapan sistem proses. Hal ini mengakibatkan overshoot dan osilasi berlebihan.
Gambar 4.26 Tanggapan loop tertutup pengendali proporsional-integral pada perubahan beban.
4.3.3 Pengendalian Proporsional-Integral-Derivatif (PID) Karakteristik Pengendali. Besar sinyal kendali yang yang dihasilkan sebanding dengan besar error, integral error, dan derivasi error. Suku derivatif bereaksi terhadap “kecepatan perubahan” error. Persamaan pengendali PID adalah,
odci
cc u
dt
deKdte
KeKu +++= ∫ τ
τ (4.10)
dengan τd adalah waktu derivatif.
Keterangan: (1) τi terlalu besar (2) τi cukup (3) τi terlalu kecil
1 2 3
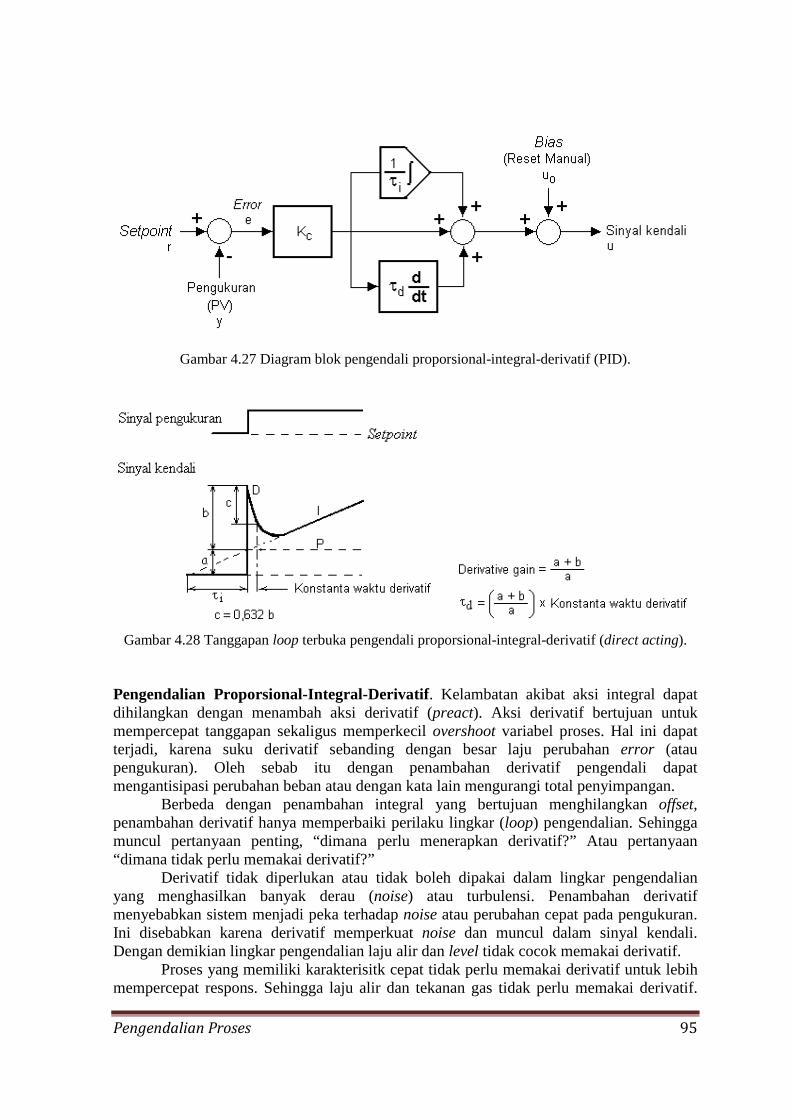
Pengendalian Proses 95
Gambar 4.27 Diagram blok pengendali proporsional-integral-derivatif (PID).
Gambar 4.28 Tanggapan loop terbuka pengendali proporsional-integral-derivatif (direct acting).
Pengendalian Proporsional-Integral-Derivatif. Kelambatan akibat aksi integral dapat dihilangkan dengan menambah aksi derivatif (preact). Aksi derivatif bertujuan untuk mempercepat tanggapan sekaligus memperkecil overshoot variabel proses. Hal ini dapat terjadi, karena suku derivatif sebanding dengan besar laju perubahan error (atau pengukuran). Oleh sebab itu dengan penambahan derivatif pengendali dapat mengantisipasi perubahan beban atau dengan kata lain mengurangi total penyimpangan.
Berbeda dengan penambahan integral yang bertujuan menghilangkan offset, penambahan derivatif hanya memperbaiki perilaku lingkar (loop) pengendalian. Sehingga muncul pertanyaan penting, “dimana perlu menerapkan derivatif?” Atau pertanyaan “dimana tidak perlu memakai derivatif?”
Derivatif tidak diperlukan atau tidak boleh dipakai dalam lingkar pengendalian yang menghasilkan banyak derau (noise) atau turbulensi. Penambahan derivatif menyebabkan sistem menjadi peka terhadap noise atau perubahan cepat pada pengukuran. Ini disebabkan karena derivatif memperkuat noise dan muncul dalam sinyal kendali. Dengan demikian lingkar pengendalian laju alir dan level tidak cocok memakai derivatif.
Proses yang memiliki karakterisitk cepat tidak perlu memakai derivatif untuk lebih mempercepat respons. Sehingga laju alir dan tekanan gas tidak perlu memakai derivatif.
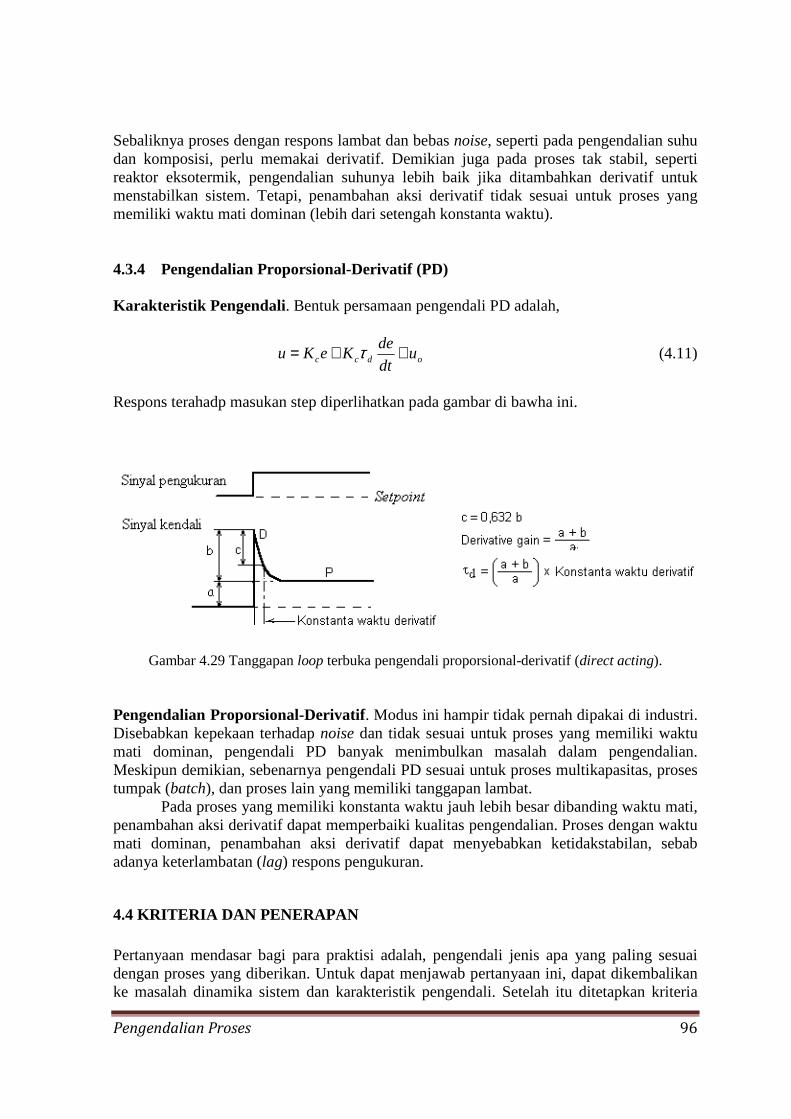
Pengendalian Proses 96
Sebaliknya proses dengan respons lambat dan bebas noise, seperti pada pengendalian suhu dan komposisi, perlu memakai derivatif. Demikian juga pada proses tak stabil, seperti reaktor eksotermik, pengendalian suhunya lebih baik jika ditambahkan derivatif untuk menstabilkan sistem. Tetapi, penambahan aksi derivatif tidak sesuai untuk proses yang memiliki waktu mati dominan (lebih dari setengah konstanta waktu).
4.3.4 Pengendalian Proporsional-Derivatif (PD) Karakteristik Pengendali. Bentuk persamaan pengendali PD adalah,
odcc udt
deKeKu ++= τ (4.11)
Respons terahadp masukan step diperlihatkan pada gambar di bawha ini.
Gambar 4.29 Tanggapan loop terbuka pengendali proporsional-derivatif (direct acting).
Pengendalian Proporsional-Derivatif. Modus ini hampir tidak pernah dipakai di industri. Disebabkan kepekaan terhadap noise dan tidak sesuai untuk proses yang memiliki waktu mati dominan, pengendali PD banyak menimbulkan masalah dalam pengendalian. Meskipun demikian, sebenarnya pengendali PD sesuai untuk proses multikapasitas, proses tumpak (batch), dan proses lain yang memiliki tanggapan lambat.
Pada proses yang memiliki konstanta waktu jauh lebih besar dibanding waktu mati, penambahan aksi derivatif dapat memperbaiki kualitas pengendalian. Proses dengan waktu mati dominan, penambahan aksi derivatif dapat menyebabkan ketidakstabilan, sebab adanya keterlambatan (lag) respons pengukuran.
4.4 KRITERIA DAN PENERAPAN Pertanyaan mendasar bagi para praktisi adalah, pengendali jenis apa yang paling sesuai dengan proses yang diberikan. Untuk dapat menjawab pertanyaan ini, dapat dikembalikan ke masalah dinamika sistem dan karakteristik pengendali. Setelah itu ditetapkan kriteria
Pengendalian Proses 97
kinerja atau performa sistem pengendalian yang dikehendaki. Dari sini dapat disimpulkan jenis pengendali apa yang paling tepat. 4.4.1 Kriteria Kinerja Sistem Pengendalian Kriteria kinerja yang dikehendaki di dasarkan atas kebutuhan sistem proses. Sebagai contoh, ada proses yang bisa menerima offset tetapi ada juga proses yang tidak dapat menerima. Atau, ada proses yang bisa menerima osilasi, sementara proses yang lain justru menghendaki tanggapan lambat. Pada setiap penerapan pengendalian pada sistem proses, dapat dibedakan dua macam kriteria, yaitu kriteria tanggapan tunak dan kriteria tanggapan dinamik. Kriteria tanggapan tunak biasanya dinyatakan dengan tidak adanya kesalahan atau galat (error) pada saat keadaan tunak. Dalam hampir semua kondisi pengendalian, kriteria ini tidak dapat dicapai, kecuali digunakan pengendali PI atau PID. Kriteria tanggapan dinamik didasarkan atas tanggapan transien lingkar tertutup yang menghasilkan galat sekecil mungkin. Kriteria ini dibedakan menja di dua macam, yaitu kriteria sederhana dan kriteria integral.
Kriteria sederhana didasarkan atas karakteristik tanggapan undak (step) lingkar tertutup. Dengan kriteria ini hanya dibutuhkan sedikit titik tanggapan. Besaran yang menentukan adalah: overshoot, waktu naik, waktu mantap, decay ratio, dan frekuensi osilasi (lihat kembali karakteristik sistem orde dua). Dari seluruh kriteria ini, yang paling populer karena sering digunakan adalah kriteria decay ratio yang tidak lain adalah kriteria redaman seperempat amplitudo. Kriteria integrasi membutuhkan data tanggapan mulai dari t = 0 hingga mencapai keadaan tunak. Dengan demikian kriteria ini didasarkan pada seluruh tanggapan dari proses yang bersangkutan. Kriteria yang paling sering digunakan adalah: ISE (integral of square error), IAE (integral of absolute error), dan ITAE (integral of product of time and the absolute error).
Secara umum tujuan kriteria integral adalah untuk mendapatkan nilai ISE, IAE, atau ITAE sekecil mungkin. Pemilihan kriteria tergantung pada karakteristik sistem proses dan beberapa syarat tambahan yang diperoleh dari tanggapan loop tertutup.
(1) Integral Galat Kuadrat (ISE)
Kriteria ini sangat populer di bidang akademik dan cocok digunakan untuk menekan galat yang besar dibanding IAE.
ISE = ∫∞
odte2 (4.12)
(2) Integral Galat Absolut (IAE)
Kriteria ini lebih populer di kalangan praktisi industri sebab mudah dalam pemakaiannya. Di samping itu, kriteria ini cocok untuk menekan galat yang kecil.
IAE = dteo∫∞
(4.13)
Pengendalian Proses 98
(3) Integral Waktu dan Galat Absolut (ITAE) Kriteria ini cocok digunakan untuk menekan galat yang terjadi dalam waktu lama. Sebab dapat menekan galat yang sangat kecil.
IAE = dteto∫∞
(4.14)
4.4.2 PEMILIHAN DAN PENERAPAN JENIS PENGENDALI Pemilihan jenis pengendali dapat dilakukan dengan dua cara. Pertama, secara teliti dengan pendekatan matematika. Kedua, secara kualitatif dengan pendekatan umum. Jika ketelitian menjadi prioritas utama dapat digunakan urutan sebagai berikut.
• Memilih kriteria kinerja yang dikehendaki (ISE, IAE, atau ITAE). • Menghitung nilai integral kriteria tersebut untuk pengendali P, PI, dan PID, pada
parameter yang berbeda-beda. • Memilih pengendali dan parameter yang menghasilkan nilai terbaik.
Meskipun cara tersebut teliti ditinjau dari segi matematika, tetapi sangat sulit dilaksanakan. Sebab diperlukan model proses yang akurat dan memerlukan perhitungan yang sangat panjang. Belum lagi kesulitan akibat banyaknya kriteria. Oleh sebab itu pemilihan secara kualitatif berikut ini masih menjadi pilihan pertama. (1) Jika mungkin, digunakan pengendali dua posisi. Jenis ini dapat digunakan jika:
• variabel proses tidak memerlukan ketelitian tinggi; • cycling pada variabel proses dapat diterima; • laju perubahan variabel proses cukup lambat.
(2) Jika pengendali dua posisi tidak mencukupi, perlu digunakan pengendali proporsional.
Jenis ini dapat digunakan jika: • offset dapat diterima dengan nilai gain (atau proportional band) yang moderat; • sistem proses memiliki aksi integrasi, misalnya tekanan gas dan level cairan; • beban tidak banyak berubah secara berlebihan; • sistem proses yang mengizinkan gain proporsional besar sehingga offset kecil.
(3) Jika pengendali proporsional tidak mencukupi, perlu digunakan pengendali proporsional-integral (PI). Jenis ini dapat digunakan jika: • variabel proses memiliki tanggapan yang cepat, misalnya laju alir. Sebab aksi
integral memperlambat tanggapan, sehingga jika prosesnya cepat, penambahan aksi integral masih tetap memuaskan. Oleh sebab itu tekanan gas dan tinggi permukaan cairan jarang dikendalikan dengan PI.
• Sistem proses yang tidak membolehkan adanya offset. (4) Jika pengendali PI tidak mencukupi, perlu digunakan pengendali proporsional-integral-
derivatif (PID). Jenis ini dapat digunakan jika sistem proses memiliki tanggapan lambat, offset tidak diperbolehkan, waktu mati cukup kecil (tidak dominan), perlu antisipasi perubahan beban, dan tidak ada noise, misalnya suhu, komposisi, dan pH.
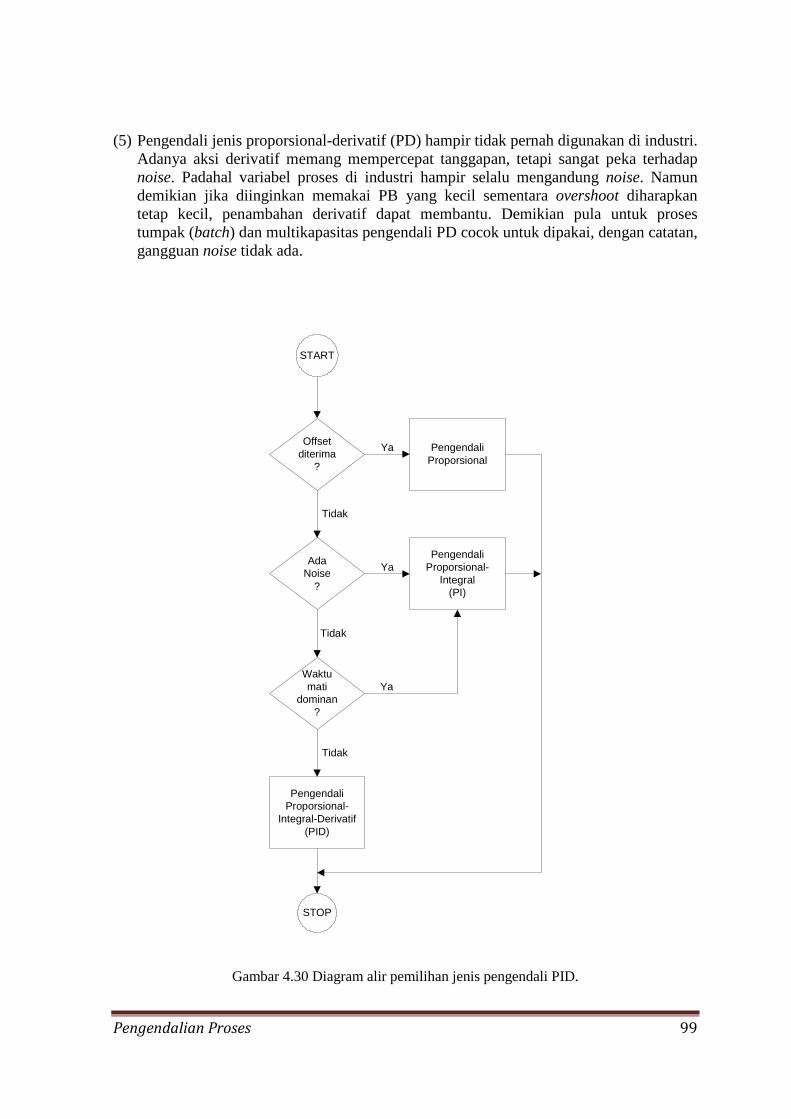
Pengendalian Proses 99
(5) Pengendali jenis proporsional-derivatif (PD) hampir tidak pernah digunakan di industri. Adanya aksi derivatif memang mempercepat tanggapan, tetapi sangat peka terhadap noise. Padahal variabel proses di industri hampir selalu mengandung noise. Namun demikian jika diinginkan memakai PB yang kecil sementara overshoot diharapkan tetap kecil, penambahan derivatif dapat membantu. Demikian pula untuk proses tumpak (batch) dan multikapasitas pengendali PD cocok untuk dipakai, dengan catatan, gangguan noise tidak ada.
START
Offsetditerima
?
AdaNoise
?
Waktumati
dominan?
PengendaliProporsional
PengendaliProporsional-
Integral(PI)
PengendaliProporsional-
Integral-Derivatif(PID)
Tidak
Tidak
Ya
Ya
Ya
Tidak
STOP
Gambar 4.30 Diagram alir pemilihan jenis pengendali PID.
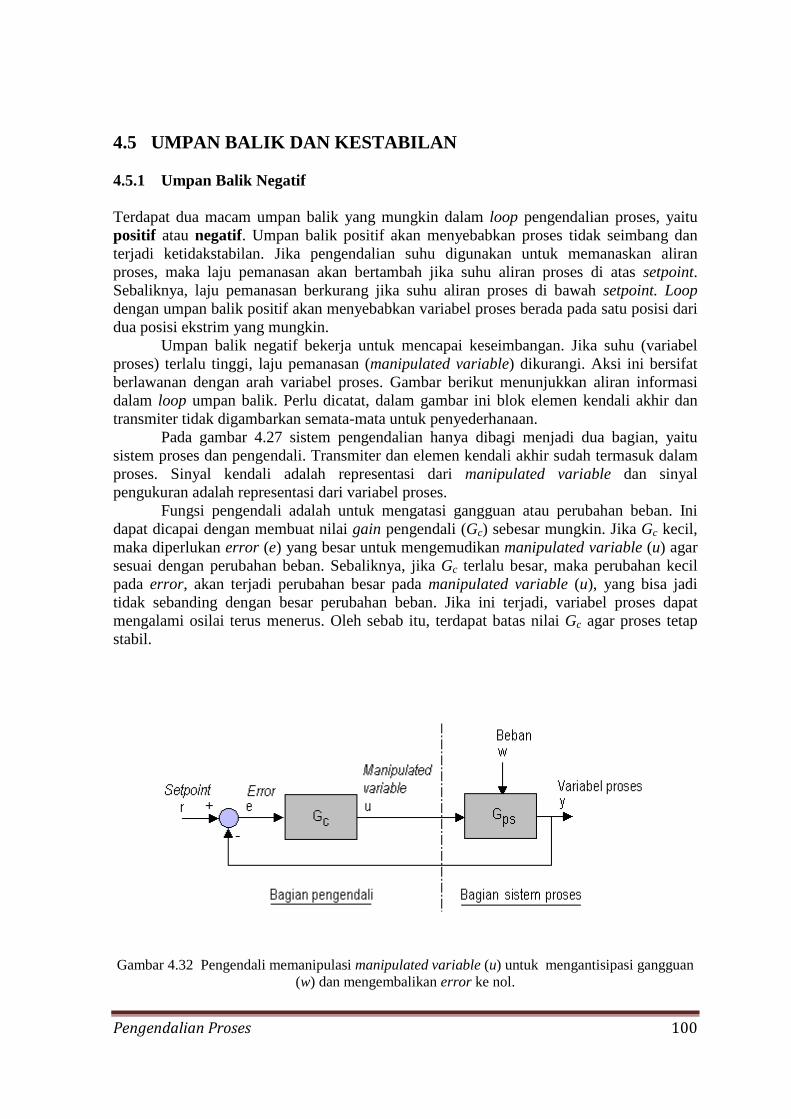
Pengendalian Proses 100
4.5 UMPAN BALIK DAN KESTABILAN 4.5.1 Umpan Balik Negatif Terdapat dua macam umpan balik yang mungkin dalam loop pengendalian proses, yaitu positif atau negatif. Umpan balik positif akan menyebabkan proses tidak seimbang dan terjadi ketidakstabilan. Jika pengendalian suhu digunakan untuk memanaskan aliran proses, maka laju pemanasan akan bertambah jika suhu aliran proses di atas setpoint. Sebaliknya, laju pemanasan berkurang jika suhu aliran proses di bawah setpoint. Loop dengan umpan balik positif akan menyebabkan variabel proses berada pada satu posisi dari dua posisi ekstrim yang mungkin. Umpan balik negatif bekerja untuk mencapai keseimbangan. Jika suhu (variabel proses) terlalu tinggi, laju pemanasan (manipulated variable) dikurangi. Aksi ini bersifat berlawanan dengan arah variabel proses. Gambar berikut menunjukkan aliran informasi dalam loop umpan balik. Perlu dicatat, dalam gambar ini blok elemen kendali akhir dan transmiter tidak digambarkan semata-mata untuk penyederhanaan. Pada gambar 4.27 sistem pengendalian hanya dibagi menjadi dua bagian, yaitu sistem proses dan pengendali. Transmiter dan elemen kendali akhir sudah termasuk dalam proses. Sinyal kendali adalah representasi dari manipulated variable dan sinyal pengukuran adalah representasi dari variabel proses.
Fungsi pengendali adalah untuk mengatasi gangguan atau perubahan beban. Ini dapat dicapai dengan membuat nilai gain pengendali (Gc) sebesar mungkin. Jika Gc kecil, maka diperlukan error (e) yang besar untuk mengemudikan manipulated variable (u) agar sesuai dengan perubahan beban. Sebaliknya, jika Gc terlalu besar, maka perubahan kecil pada error, akan terjadi perubahan besar pada manipulated variable (u), yang bisa jadi tidak sebanding dengan besar perubahan beban. Jika ini terjadi, variabel proses dapat mengalami osilai terus menerus. Oleh sebab itu, terdapat batas nilai Gc agar proses tetap stabil.
Gambar 4.32 Pengendali memanipulasi manipulated variable (u) untuk mengantisipasi gangguan
(w) dan mengembalikan error ke nol.
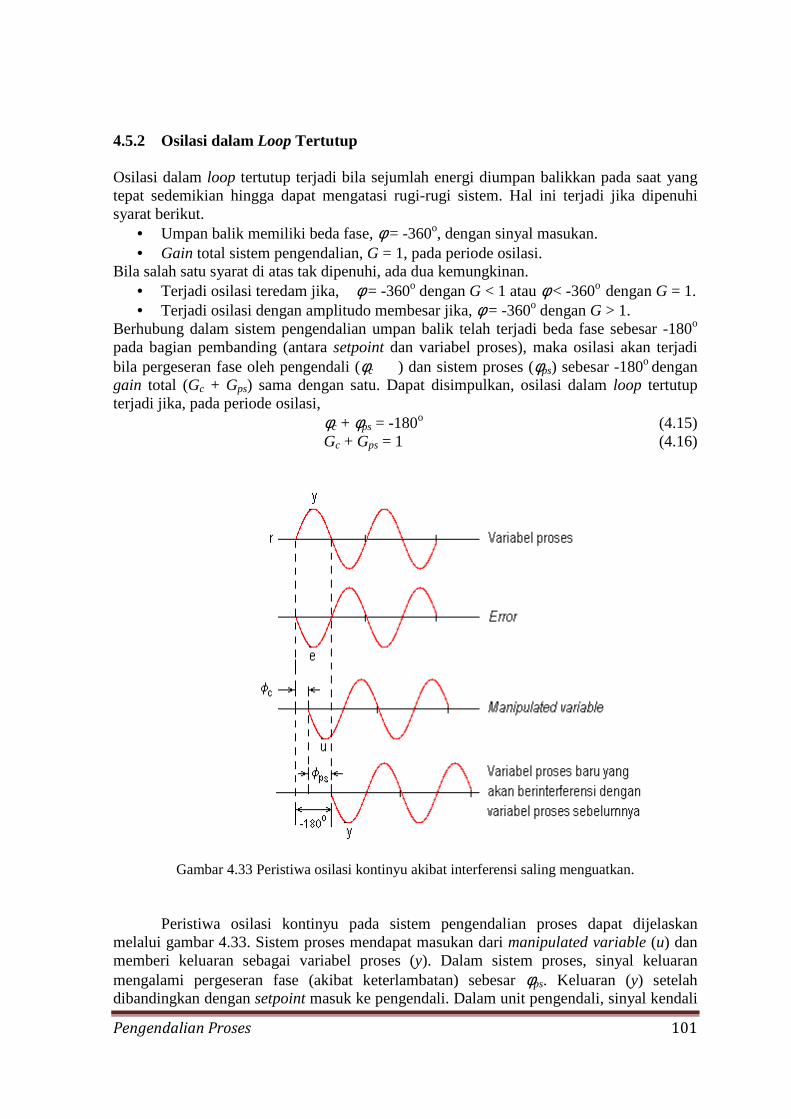
Pengendalian Proses 101
4.5.2 Osilasi dalam Loop Tertutup Osilasi dalam loop tertutup terjadi bila sejumlah energi diumpan balikkan pada saat yang tepat sedemikian hingga dapat mengatasi rugi-rugi sistem. Hal ini terjadi jika dipenuhi syarat berikut.
• Umpan balik memiliki beda fase, φ = -360o, dengan sinyal masukan. • Gain total sistem pengendalian, G = 1, pada periode osilasi.
Bila salah satu syarat di atas tak dipenuhi, ada dua kemungkinan. • Terjadi osilasi teredam jika,� φ = -360o dengan G < 1 atau φ < -360o
dengan G = 1. • Terjadi osilasi dengan amplitudo membesar jika, φ = -360o dengan G > 1.
Berhubung dalam sistem pengendalian umpan balik telah terjadi beda fase sebesar -180o pada bagian pembanding (antara setpoint dan variabel proses), maka osilasi akan terjadi bila pergeseran fase oleh pengendali (φc��) dan sistem proses (φps) sebesar -180o dengan gain total (Gc + Gps) sama dengan satu. Dapat disimpulkan, osilasi dalam loop tertutup terjadi jika, pada periode osilasi,
φc + φps = -180o (4.15) Gc + Gps = 1 (4.16)
Gambar 4.33 Peristiwa osilasi kontinyu akibat interferensi saling menguatkan.
Peristiwa osilasi kontinyu pada sistem pengendalian proses dapat dijelaskan melalui gambar 4.33. Sistem proses mendapat masukan dari manipulated variable (u) dan memberi keluaran sebagai variabel proses (y). Dalam sistem proses, sinyal keluaran mengalami pergeseran fase (akibat keterlambatan) sebesar φps. Keluaran (y) setelah dibandingkan dengan setpoint masuk ke pengendali. Dalam unit pengendali, sinyal kendali
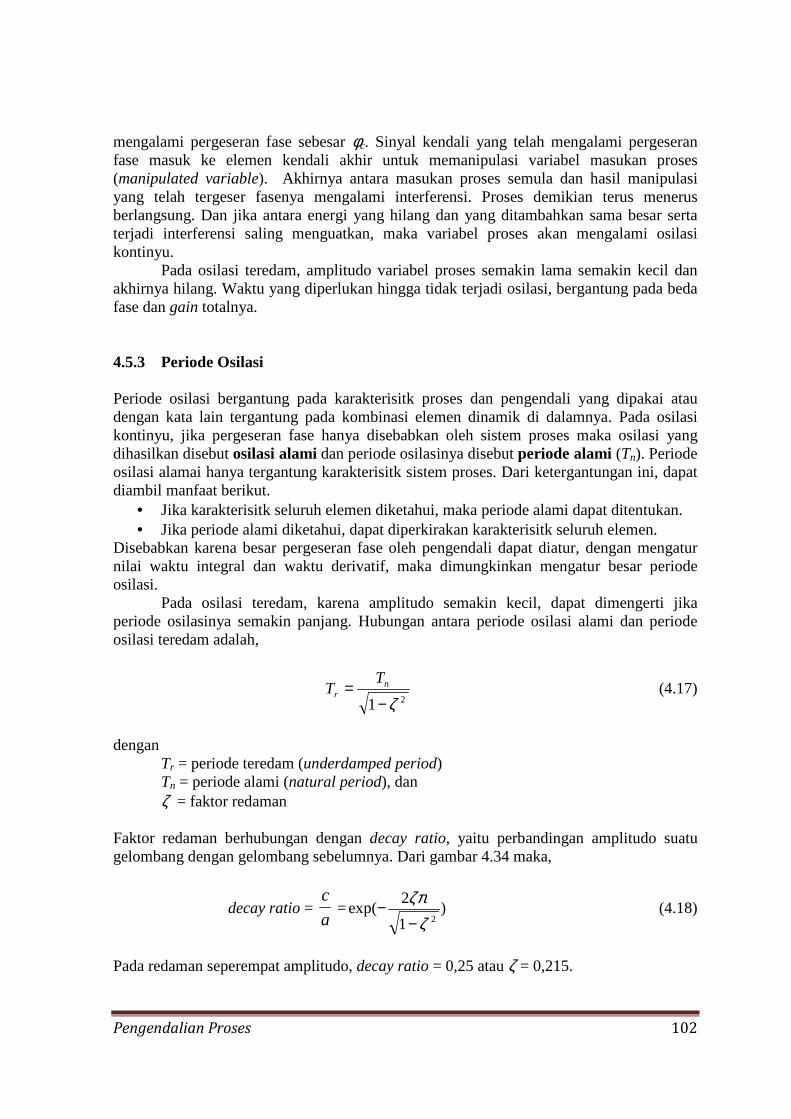
Pengendalian Proses 102
mengalami pergeseran fase sebesar φc. Sinyal kendali yang telah mengalami pergeseran fase masuk ke elemen kendali akhir untuk memanipulasi variabel masukan proses (manipulated variable). Akhirnya antara masukan proses semula dan hasil manipulasi yang telah tergeser fasenya mengalami interferensi. Proses demikian terus menerus berlangsung. Dan jika antara energi yang hilang dan yang ditambahkan sama besar serta terjadi interferensi saling menguatkan, maka variabel proses akan mengalami osilasi kontinyu.
Pada osilasi teredam, amplitudo variabel proses semakin lama semakin kecil dan akhirnya hilang. Waktu yang diperlukan hingga tidak terjadi osilasi, bergantung pada beda fase dan gain totalnya.
4.5.3 Periode Osilasi Periode osilasi bergantung pada karakterisitk proses dan pengendali yang dipakai atau dengan kata lain tergantung pada kombinasi elemen dinamik di dalamnya. Pada osilasi kontinyu, jika pergeseran fase hanya disebabkan oleh sistem proses maka osilasi yang dihasilkan disebut osilasi alami dan periode osilasinya disebut periode alami (Tn). Periode osilasi alamai hanya tergantung karakterisitk sistem proses. Dari ketergantungan ini, dapat diambil manfaat berikut.
• Jika karakterisitk seluruh elemen diketahui, maka periode alami dapat ditentukan. • Jika periode alami diketahui, dapat diperkirakan karakterisitk seluruh elemen.
Disebabkan karena besar pergeseran fase oleh pengendali dapat diatur, dengan mengatur nilai waktu integral dan waktu derivatif, maka dimungkinkan mengatur besar periode osilasi. Pada osilasi teredam, karena amplitudo semakin kecil, dapat dimengerti jika periode osilasinya semakin panjang. Hubungan antara periode osilasi alami dan periode osilasi teredam adalah,
21 ζ−= n
r
TT (4.17)
dengan
Tr = periode teredam (underdamped period) Tn = periode alami (natural period), dan ζ = faktor redaman
Faktor redaman berhubungan dengan decay ratio, yaitu perbandingan amplitudo suatu gelombang dengan gelombang sebelumnya. Dari gambar 4.34 maka,
decay ratio = a
c = )
1
2exp(
2ζζπ−
− (4.18)
Pada redaman seperempat amplitudo, decay ratio = 0,25 atau ζ = 0,215.
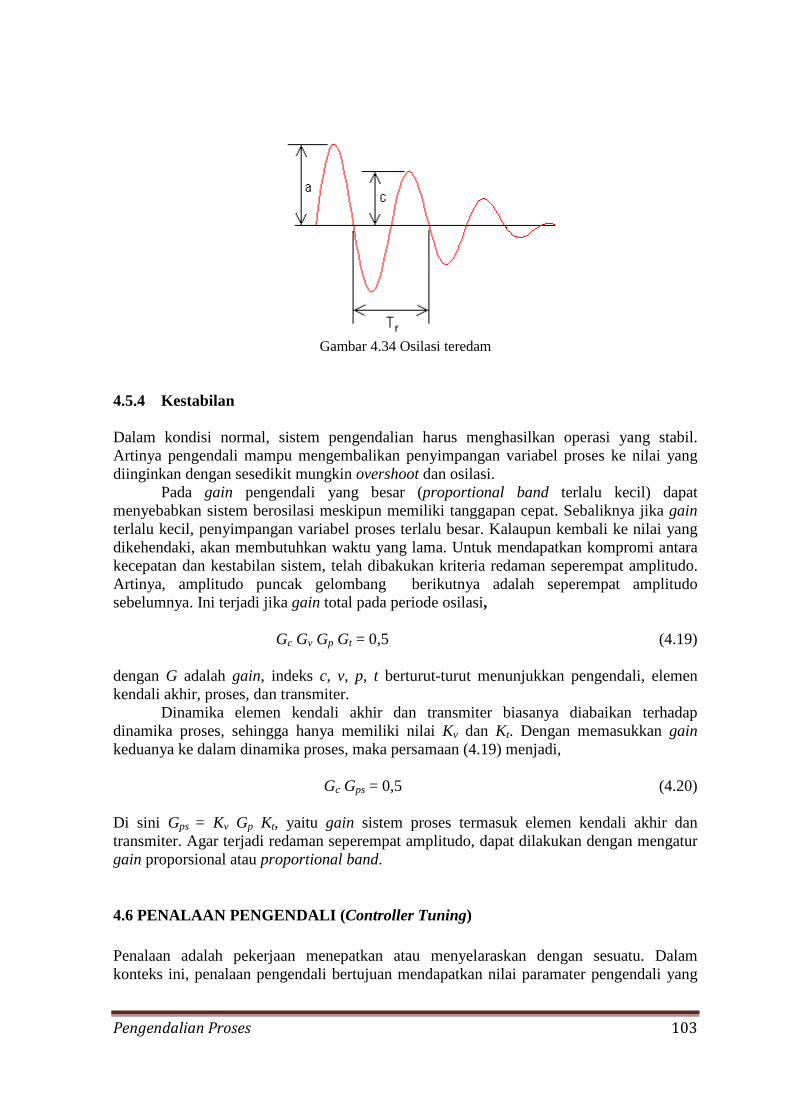
Pengendalian Proses 103
Gambar 4.34 Osilasi teredam
4.5.4 Kestabilan Dalam kondisi normal, sistem pengendalian harus menghasilkan operasi yang stabil. Artinya pengendali mampu mengembalikan penyimpangan variabel proses ke nilai yang diinginkan dengan sesedikit mungkin overshoot dan osilasi.
Pada gain pengendali yang besar (proportional band terlalu kecil) dapat menyebabkan sistem berosilasi meskipun memiliki tanggapan cepat. Sebaliknya jika gain terlalu kecil, penyimpangan variabel proses terlalu besar. Kalaupun kembali ke nilai yang dikehendaki, akan membutuhkan waktu yang lama. Untuk mendapatkan kompromi antara kecepatan dan kestabilan sistem, telah dibakukan kriteria redaman seperempat amplitudo. Artinya, amplitudo puncak gelombang berikutnya adalah seperempat amplitudo sebelumnya. Ini terjadi jika gain total pada periode osilasi,
Gc Gv Gp Gt = 0,5 (4.19)
dengan G adalah gain, indeks c, v, p, t berturut-turut menunjukkan pengendali, elemen kendali akhir, proses, dan transmiter.
Dinamika elemen kendali akhir dan transmiter biasanya diabaikan terhadap dinamika proses, sehingga hanya memiliki nilai Kv dan Kt. Dengan memasukkan gain keduanya ke dalam dinamika proses, maka persamaan (4.19) menjadi,
Gc Gps = 0,5 (4.20)
Di sini Gps = Kv Gp Kt, yaitu gain sistem proses termasuk elemen kendali akhir dan transmiter. Agar terjadi redaman seperempat amplitudo, dapat dilakukan dengan mengatur gain proporsional atau proportional band.
4.6 PENALAAN PENGENDALI (Controller Tuning) Penalaan adalah pekerjaan menepatkan atau menyelaraskan dengan sesuatu. Dalam konteks ini, penalaan pengendali bertujuan mendapatkan nilai paramater pengendali yang
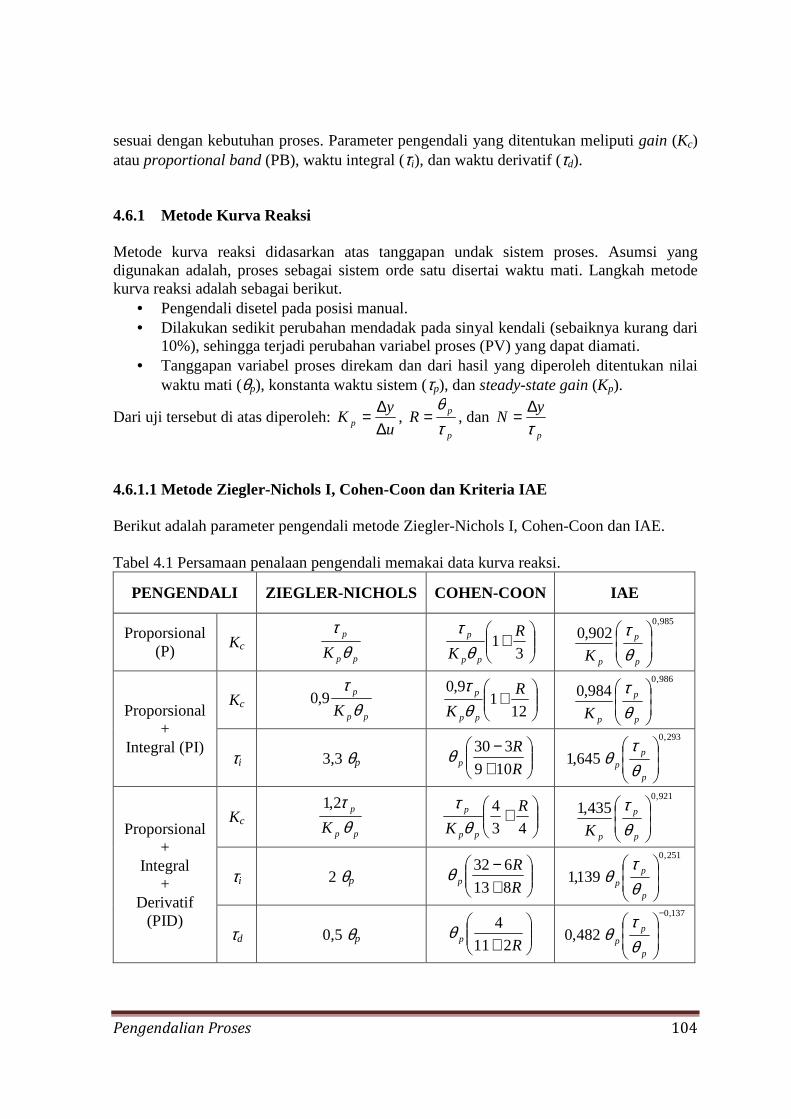
Pengendalian Proses 104
sesuai dengan kebutuhan proses. Parameter pengendali yang ditentukan meliputi gain (Kc) atau proportional band (PB), waktu integral (τi), dan waktu derivatif (τd). 4.6.1 Metode Kurva Reaksi Metode kurva reaksi didasarkan atas tanggapan undak sistem proses. Asumsi yang digunakan adalah, proses sebagai sistem orde satu disertai waktu mati. Langkah metode kurva reaksi adalah sebagai berikut.
• Pengendali disetel pada posisi manual. • Dilakukan sedikit perubahan mendadak pada sinyal kendali (sebaiknya kurang dari
10%), sehingga terjadi perubahan variabel proses (PV) yang dapat diamati. • Tanggapan variabel proses direkam dan dari hasil yang diperoleh ditentukan nilai
waktu mati (θp), konstanta waktu sistem (τp), dan steady-state gain (Kp).
Dari uji tersebut di atas diperoleh: u
yK p ∆
∆= , p
pRτθ
= , dan p
yN
τ∆=
4.6.1.1 Metode Ziegler-Nichols I, Cohen-Coon dan Kriteria IAE Berikut adalah parameter pengendali metode Ziegler-Nichols I, Cohen-Coon dan IAE. Tabel 4.1 Persamaan penalaan pengendali memakai data kurva reaksi.
PENGENDALI ZIEGLER-NICHOLS COHEN-COON IAE
Proporsional (P)
Kc pp
p
K θτ
+
31
R
K pp
p
θτ
985,0
902,0
p
p
pK θτ
Proporsional +
Integral (PI)
Kc pp
p
K θτ
9,0
+
121
9,0 R
K pp
p
θτ
986,0
984,0
p
p
pK θτ
τi 3,3 θp
+−
R
Rp 109
330θ 293,0
645,1
p
pp θ
τθ
Proporsional +
Integral +
Derivatif (PID)
Kc pp
p
K θτ2,1
+
43
4 R
K pp
p
θτ
921,0
435,1
p
p
pK θτ
τi 2 θp
+−
R
Rp 813
632θ 251,0
139,1
p
pp θ
τθ
τd 0,5 θp
+ Rp 211
4θ 137,0
482,0
−
p
pp θ
τθ

Pengendalian Proses 105
4.6.1.2 Metode Chien-Hrones-Reswick Berikut adalah parameter pengendali metode Chien-Hrones-Reswick. Tabel 4.2 Parameter pengendali dengan metode Chien-Hrones-Reswick
PENGENDALI
TANGGAPAN TEREDAM TANGGAPAN 20%
OVERSHOOT
Perubahan Gangguan
Perubahan Setpoint
Perubahan Gangguan
Perubahan Setpoint
P Kc pp
p
K θτ3,0
pp
p
K θτ3,0
pp
p
K θτ7,0
pp
p
K θτ7,0
PI Kc
pp
p
K θτ6,0
pp
p
K θτ35,0
pp
p
K θτ7,0
pp
p
K θτ6,0
τi pθ4 pθ2,1 pθ3,2 pθ
PID
Kc pp
p
K θτ95,0
pp
p
K θτ6,0
pp
p
K θτ2,1
pp
p
K θτ95,0
τi pθ4,2 pθ pθ2 pθ35,1
τd 0,42 pθ 0,5 pθ 0,42 pθ 0,47 pθ
4.6.2 Metode Osilasi Lingkar Tertutup Metode osilasi lingkar tertutup dikenal dengan metode Ziegler-Nichols II. Pada prinsipnya dalam lingkar tertutup dibuat kondisi osilasi alami. Ini terjadi ketika pergeseran fase hanya disebabkan oleh sistem proses. Dengan kata lain pengendali pada modus proporsional saja. Adapun langkah penalaan adalah sebagai berikut. 1) Pengendali disetel pada posisi automatik. 2) Aksi integral dan derivatif dimatikan, dengan membuat waktu integral maksimum,
waktu derivatif nol, dan proportional band (PB) maksimum. 3) Secara berangsur PB diperkecil setengahnya, sambil diadakan perubahan kecil pada
gangguan (beban) atau setpoint. 4) Langkah nomor (3) diulang terus sampai muncul osilasi kontinyu pada variabel proses
(PV). Pada keadaan ini, proportional band sebagai proportional band kritik (PBu) atau proportional gain sebagai proportional gain kritik (K cu), dan periode osilasi sebagai periode osilasi kritik (Tu). Selanjutnya parameter pengendali mengikuti tabel berikut.
Tabel 4.3 Parameter pengendali dengan metode Zigler-Nichols II
PENGENDALI Kc ττττi ττττd
P 0 5, Kcu ∞ 0
PI 0 45, Kcu Tu
1 2, 0
PID 0 6, Kcu 0 5, Tu 0 125, Tu
Pengendalian Proses 106
4.6.3 Metode Coba-Coba Metode coba-coba (trial and error) sangat efektif jika dikerjakan oleh operator yang berpe-ngalaman. Dengan bekal pengalaman bekerja dalam pengendalian proses, biasanya operator memiliki intuisi tajam dan mampu melakukan penyetelan yang tepat. Meskipun demikian, metode ini dapat dicoba oleh mereka yang belum berpengalaman dengan melaksanakan langkah berikut. Pengendali PI 1) Pertama-tama pengendali disetel ke posisi manual (MANU). 2) Manipulated variable (MV) diubah sebesar 5 - 10%. Kemudian diukur waktu yang
dibutuhkan variabel proses saat mulai memberi tanggapan. Watu integral (Ti) dibuat lima kali waktu tersebut.
3) Proportional band dibuat maksimum, dan pengendali di taruh ke posisi automatik (AUTO).
4) Sambil memberi gangguan perubahan setpoint, PB diperkecil sepertiganya. 5) Langkah nomor (4) diulang terus hingga diperoleh tanggapan variabel proses yang
dikehendaki. 6) Waktu integral diperkecil sehingga diperoleh tanggapan secepat mungkin tetapi
overshoot masih dapat diterima. Pengendali PID 1) Proportional band dibuat maksimum, waktu integral maksimum, dan waktu derivatif
minimum (nol). 2) Perlahan-lahan PB diperkecil hingga diperoleh cukup overshoot pada variabel proses
jika sistem proses diberi gangguan. 3) Waktu derivatif dinaikkan, hingga overshoot hilang. 4) Langkah (2) dan (3) diulang, hingga diperoleh tanggapan transien sesuai yang
diinginkan. 5) Waktu integral diperkecil, hingga diperoleh cukup overshoot pada variabel proses jika
sistem proses diberi gangguan. 6) Waktu derivatif dinaikkan hingga diperoleh tanggapan transien yang diinginkan.
4.7 KOMENTAR SEKITAR PENALAAN
Penalaan pengendali merupakan pekerjaan rumit yang menuntut kesabaran dan pengalaman operator. Oleh sebab itu metode penalaan yang diuraikan di atas, hanya sebagai acuan awal. Selanjutnya diperlukan penalaan halus agar diperoleh kualitas pengendalian yang optimal. Beberapa catatan yang perlu diperhatikan adalah, metode kurva reaksi tidak dapat dipakai jika sistem proses bersifat integrator. Jika dalam rangkaian proses terdapat integrator, maka bagian ini harus dibuat mantap terlebih dahulu dengan cara manipulasi proses atau dengan pengendali lokal. Metode osilasi lingkar tertutup, kadang-kadang tidak dapat dilakukan pada proses yang peka terhadap variasi variabel proses, misalnya reaktor eksotermal atau reaktor bioproses. Sekedar acuan, di sini disampaikan nilai parameter pengendali yang umum ditemui.
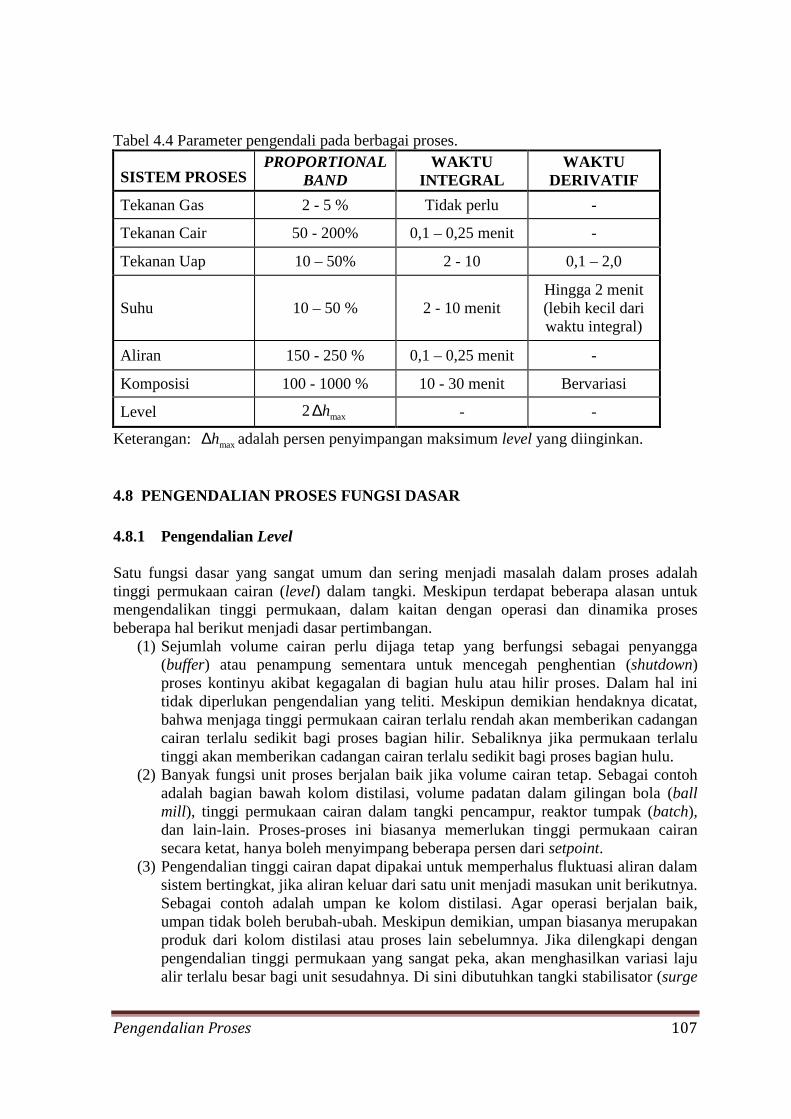
Pengendalian Proses 107
Tabel 4.4 Parameter pengendali pada berbagai proses.
SISTEM PROSES PROPORTIONAL
BAND WAKTU
INTEGRAL WAKTU
DERIVATIF
Tekanan Gas 2 - 5 % Tidak perlu -
Tekanan Cair 50 - 200% 0,1 – 0,25 menit -
Tekanan Uap 10 – 50% 2 - 10 0,1 – 2,0
Suhu 10 – 50 % 2 - 10 menit Hingga 2 menit (lebih kecil dari waktu integral)
Aliran 150 - 250 % 0,1 – 0,25 menit -
Komposisi 100 - 1000 % 10 - 30 menit Bervariasi
Level 2 maxh∆ - -
Keterangan: maxh∆ adalah persen penyimpangan maksimum level yang diinginkan.
4.8 PENGENDALIAN PROSES FUNGSI DASAR 4.8.1 Pengendalian Level Satu fungsi dasar yang sangat umum dan sering menjadi masalah dalam proses adalah tinggi permukaan cairan (level) dalam tangki. Meskipun terdapat beberapa alasan untuk mengendalikan tinggi permukaan, dalam kaitan dengan operasi dan dinamika proses beberapa hal berikut menjadi dasar pertimbangan.
(1) Sejumlah volume cairan perlu dijaga tetap yang berfungsi sebagai penyangga (buffer) atau penampung sementara untuk mencegah penghentian (shutdown) proses kontinyu akibat kegagalan di bagian hulu atau hilir proses. Dalam hal ini tidak diperlukan pengendalian yang teliti. Meskipun demikian hendaknya dicatat, bahwa menjaga tinggi permukaan cairan terlalu rendah akan memberikan cadangan cairan terlalu sedikit bagi proses bagian hilir. Sebaliknya jika permukaan terlalu tinggi akan memberikan cadangan cairan terlalu sedikit bagi proses bagian hulu.
(2) Banyak fungsi unit proses berjalan baik jika volume cairan tetap. Sebagai contoh adalah bagian bawah kolom distilasi, volume padatan dalam gilingan bola (ball mill), tinggi permukaan cairan dalam tangki pencampur, reaktor tumpak (batch), dan lain-lain. Proses-proses ini biasanya memerlukan tinggi permukaan cairan secara ketat, hanya boleh menyimpang beberapa persen dari setpoint.
(3) Pengendalian tinggi cairan dapat dipakai untuk memperhalus fluktuasi aliran dalam sistem bertingkat, jika aliran keluar dari satu unit menjadi masukan unit berikutnya. Sebagai contoh adalah umpan ke kolom distilasi. Agar operasi berjalan baik, umpan tidak boleh berubah-ubah. Meskipun demikian, umpan biasanya merupakan produk dari kolom distilasi atau proses lain sebelumnya. Jika dilengkapi dengan pengendalian tinggi permukaan yang sangat peka, akan menghasilkan variasi laju alir terlalu besar bagi unit sesudahnya. Di sini dibutuhkan tangki stabilisator (surge
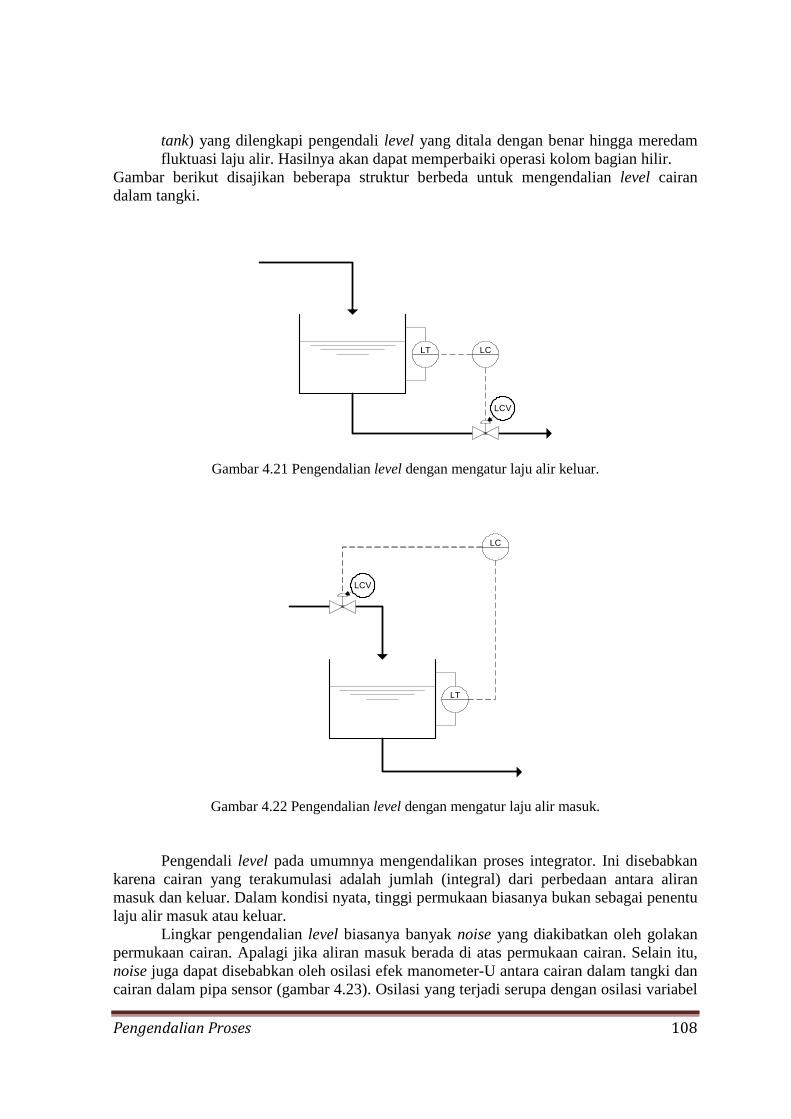
Pengendalian Proses 108
tank) yang dilengkapi pengendali level yang ditala dengan benar hingga meredam fluktuasi laju alir. Hasilnya akan dapat memperbaiki operasi kolom bagian hilir.
Gambar berikut disajikan beberapa struktur berbeda untuk mengendalian level cairan dalam tangki.
LCV
LT LC
Gambar 4.21 Pengendalian level dengan mengatur laju alir keluar.
LCV
LT
LC
Gambar 4.22 Pengendalian level dengan mengatur laju alir masuk. Pengendali level pada umumnya mengendalikan proses integrator. Ini disebabkan karena cairan yang terakumulasi adalah jumlah (integral) dari perbedaan antara aliran masuk dan keluar. Dalam kondisi nyata, tinggi permukaan biasanya bukan sebagai penentu laju alir masuk atau keluar. Lingkar pengendalian level biasanya banyak noise yang diakibatkan oleh golakan permukaan cairan. Apalagi jika aliran masuk berada di atas permukaan cairan. Selain itu, noise juga dapat disebabkan oleh osilasi efek manometer-U antara cairan dalam tangki dan cairan dalam pipa sensor (gambar 4.23). Osilasi yang terjadi serupa dengan osilasi variabel
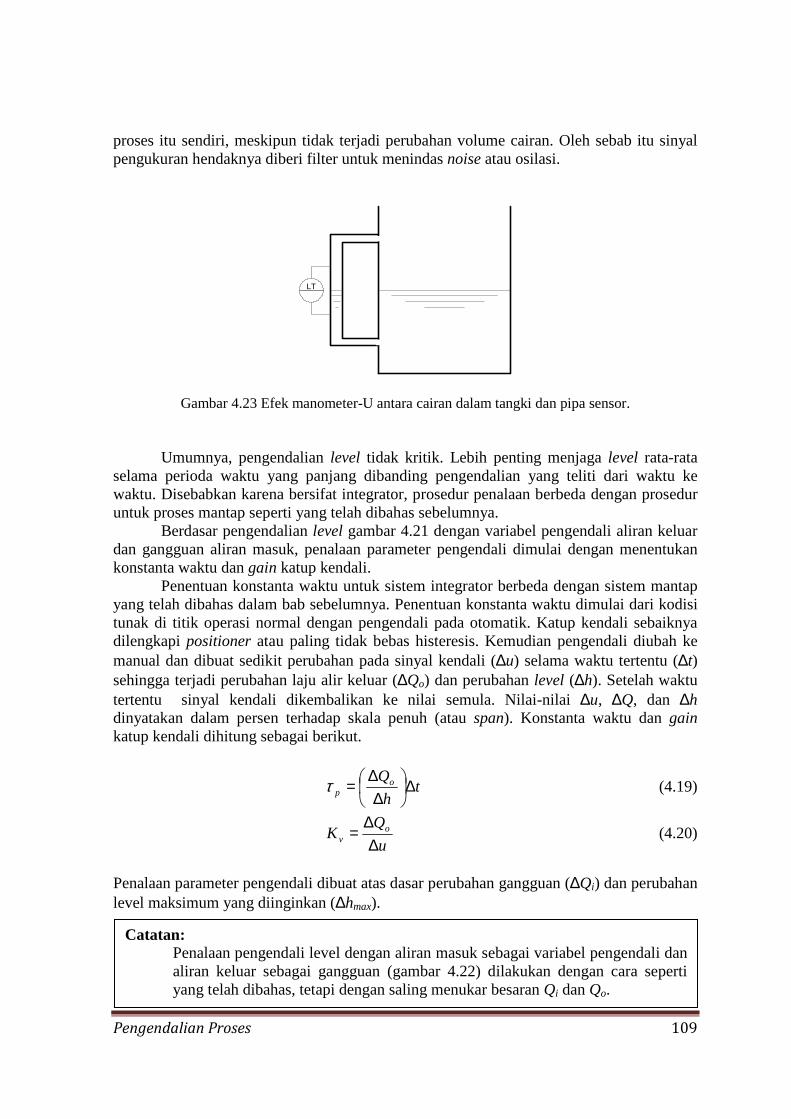
Pengendalian Proses 109
proses itu sendiri, meskipun tidak terjadi perubahan volume cairan. Oleh sebab itu sinyal pengukuran hendaknya diberi filter untuk menindas noise atau osilasi.
LT
Gambar 4.23 Efek manometer-U antara cairan dalam tangki dan pipa sensor. Umumnya, pengendalian level tidak kritik. Lebih penting menjaga level rata-rata selama perioda waktu yang panjang dibanding pengendalian yang teliti dari waktu ke waktu. Disebabkan karena bersifat integrator, prosedur penalaan berbeda dengan prosedur untuk proses mantap seperti yang telah dibahas sebelumnya.
Berdasar pengendalian level gambar 4.21 dengan variabel pengendali aliran keluar dan gangguan aliran masuk, penalaan parameter pengendali dimulai dengan menentukan konstanta waktu dan gain katup kendali.
Penentuan konstanta waktu untuk sistem integrator berbeda dengan sistem mantap yang telah dibahas dalam bab sebelumnya. Penentuan konstanta waktu dimulai dari kodisi tunak di titik operasi normal dengan pengendali pada otomatik. Katup kendali sebaiknya dilengkapi positioner atau paling tidak bebas histeresis. Kemudian pengendali diubah ke manual dan dibuat sedikit perubahan pada sinyal kendali (∆u) selama waktu tertentu (∆t) sehingga terjadi perubahan laju alir keluar (∆Qo) dan perubahan level (∆h). Setelah waktu tertentu sinyal kendali dikembalikan ke nilai semula. Nilai-nilai ∆u, ∆Q, dan ∆h dinyatakan dalam persen terhadap skala penuh (atau span). Konstanta waktu dan gain katup kendali dihitung sebagai berikut.
th
Qop ∆
∆∆
=τ (4.19)
u
QK o
v ∆∆
= (4.20)
Penalaan parameter pengendali dibuat atas dasar perubahan gangguan (∆Qi) dan perubahan level maksimum yang diinginkan (∆hmax).
Catatan: Penalaan pengendali level dengan aliran masuk sebagai variabel pengendali dan aliran keluar sebagai gangguan (gambar 4.22) dilakukan dengan cara seperti yang telah dibahas, tetapi dengan saling menukar besaran Qi dan Qo.
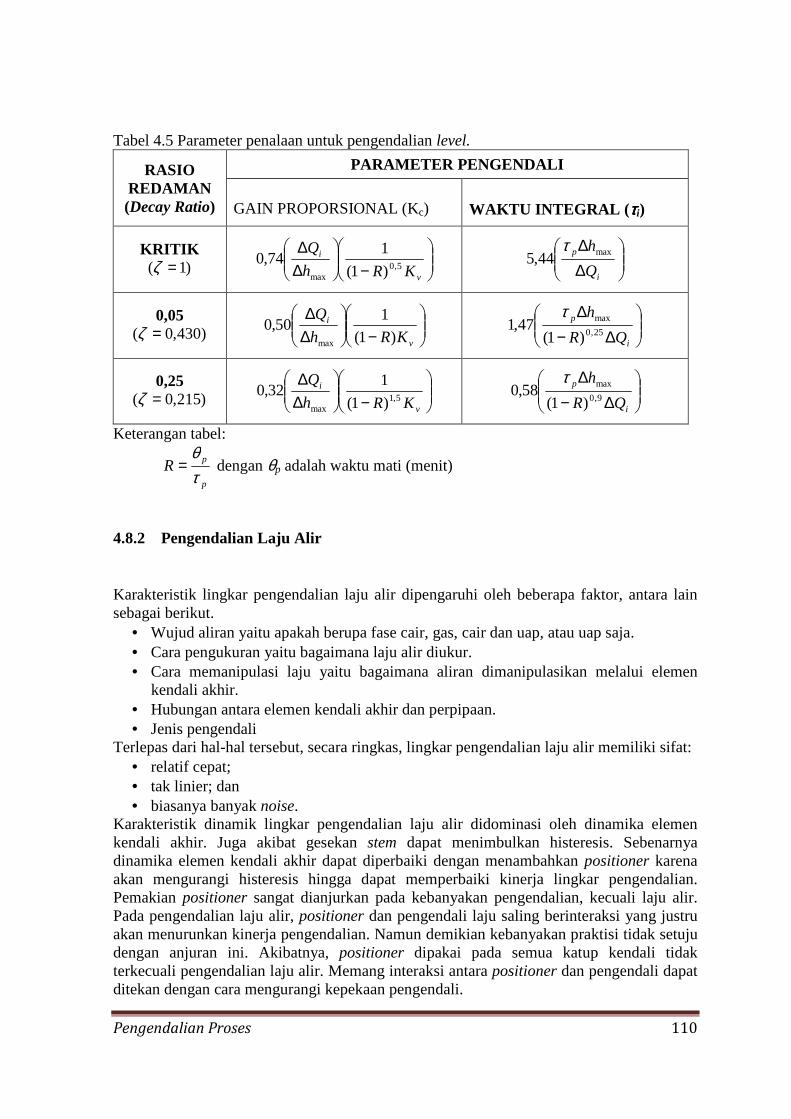
Pengendalian Proses 110
Tabel 4.5 Parameter penalaan untuk pengendalian level.
RASIO REDAMAN (Decay Ratio)
PARAMETER PENGENDALI
GAIN PROPORSIONAL (Kc) WAKTU INTEGRAL (ττττi)
KRITIK )1( =ζ
−
∆∆
v
i
KRh
Q5,0
max )1(
174,0
∆∆
i
p
Q
hmax44,5τ
0,05 )430,0( =ζ
−
∆∆
v
i
KRh
Q
)1(
150,0
max
∆−∆
i
p
QR
h25,0
max
)1(47,1
τ
0,25 )215,0( =ζ
−
∆∆
v
i
KRh
Q5,1
max )1(
132,0
∆−∆
i
p
QR
h9,0
max
)1(58,0
τ
Keterangan tabel:
p
pRτθ
= dengan θp adalah waktu mati (menit)
4.8.2 Pengendalian Laju Alir
Karakteristik lingkar pengendalian laju alir dipengaruhi oleh beberapa faktor, antara lain sebagai berikut.
• Wujud aliran yaitu apakah berupa fase cair, gas, cair dan uap, atau uap saja. • Cara pengukuran yaitu bagaimana laju alir diukur. • Cara memanipulasi laju yaitu bagaimana aliran dimanipulasikan melalui elemen
kendali akhir. • Hubungan antara elemen kendali akhir dan perpipaan. • Jenis pengendali
Terlepas dari hal-hal tersebut, secara ringkas, lingkar pengendalian laju alir memiliki sifat: • relatif cepat; • tak linier; dan • biasanya banyak noise.
Karakteristik dinamik lingkar pengendalian laju alir didominasi oleh dinamika elemen kendali akhir. Juga akibat gesekan stem dapat menimbulkan histeresis. Sebenarnya dinamika elemen kendali akhir dapat diperbaiki dengan menambahkan positioner karena akan mengurangi histeresis hingga dapat memperbaiki kinerja lingkar pengendalian. Pemakian positioner sangat dianjurkan pada kebanyakan pengendalian, kecuali laju alir. Pada pengendalian laju alir, positioner dan pengendali laju saling berinteraksi yang justru akan menurunkan kinerja pengendalian. Namun demikian kebanyakan praktisi tidak setuju dengan anjuran ini. Akibatnya, positioner dipakai pada semua katup kendali tidak terkecuali pengendalian laju alir. Memang interaksi antara positioner dan pengendali dapat ditekan dengan cara mengurangi kepekaan pengendali.
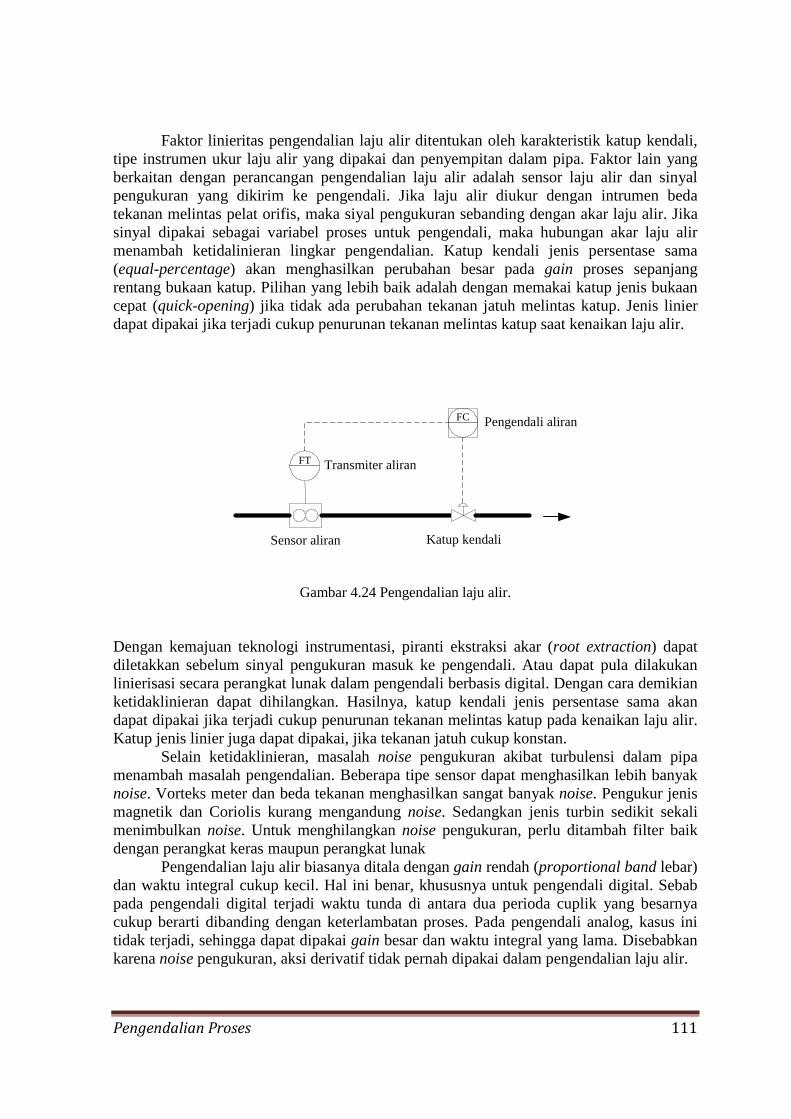
Pengendalian Proses 111
Faktor linieritas pengendalian laju alir ditentukan oleh karakteristik katup kendali, tipe instrumen ukur laju alir yang dipakai dan penyempitan dalam pipa. Faktor lain yang berkaitan dengan perancangan pengendalian laju alir adalah sensor laju alir dan sinyal pengukuran yang dikirim ke pengendali. Jika laju alir diukur dengan intrumen beda tekanan melintas pelat orifis, maka siyal pengukuran sebanding dengan akar laju alir. Jika sinyal dipakai sebagai variabel proses untuk pengendali, maka hubungan akar laju alir menambah ketidalinieran lingkar pengendalian. Katup kendali jenis persentase sama (equal-percentage) akan menghasilkan perubahan besar pada gain proses sepanjang rentang bukaan katup. Pilihan yang lebih baik adalah dengan memakai katup jenis bukaan cepat (quick-opening) jika tidak ada perubahan tekanan jatuh melintas katup. Jenis linier dapat dipakai jika terjadi cukup penurunan tekanan melintas katup saat kenaikan laju alir.
FT
FC
Sensor aliran
Transmiter aliran
Pengendali aliran
Katup kendali
Gambar 4.24 Pengendalian laju alir. Dengan kemajuan teknologi instrumentasi, piranti ekstraksi akar (root extraction) dapat diletakkan sebelum sinyal pengukuran masuk ke pengendali. Atau dapat pula dilakukan linierisasi secara perangkat lunak dalam pengendali berbasis digital. Dengan cara demikian ketidaklinieran dapat dihilangkan. Hasilnya, katup kendali jenis persentase sama akan dapat dipakai jika terjadi cukup penurunan tekanan melintas katup pada kenaikan laju alir. Katup jenis linier juga dapat dipakai, jika tekanan jatuh cukup konstan. Selain ketidaklinieran, masalah noise pengukuran akibat turbulensi dalam pipa menambah masalah pengendalian. Beberapa tipe sensor dapat menghasilkan lebih banyak noise. Vorteks meter dan beda tekanan menghasilkan sangat banyak noise. Pengukur jenis magnetik dan Coriolis kurang mengandung noise. Sedangkan jenis turbin sedikit sekali menimbulkan noise. Untuk menghilangkan noise pengukuran, perlu ditambah filter baik dengan perangkat keras maupun perangkat lunak
Pengendalian laju alir biasanya ditala dengan gain rendah (proportional band lebar) dan waktu integral cukup kecil. Hal ini benar, khususnya untuk pengendali digital. Sebab pada pengendali digital terjadi waktu tunda di antara dua perioda cuplik yang besarnya cukup berarti dibanding dengan keterlambatan proses. Pada pengendali analog, kasus ini tidak terjadi, sehingga dapat dipakai gain besar dan waktu integral yang lama. Disebabkan karena noise pengukuran, aksi derivatif tidak pernah dipakai dalam pengendalian laju alir.
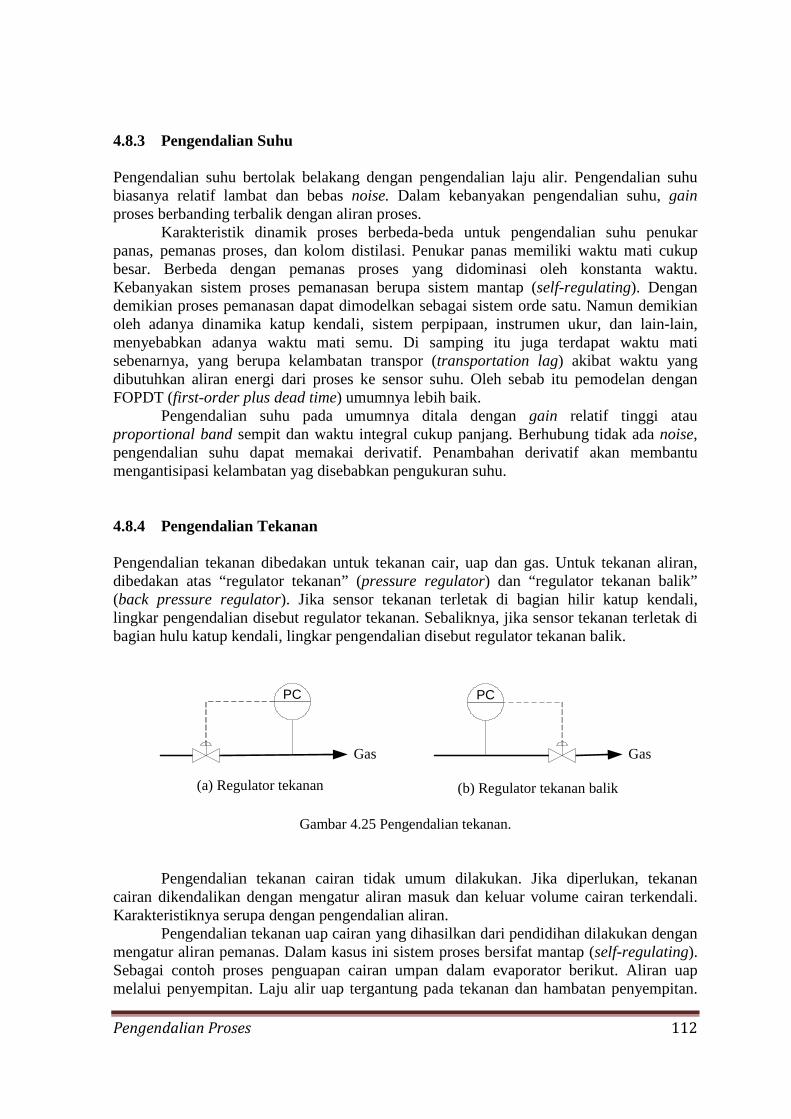
Pengendalian Proses 112
4.8.3 Pengendalian Suhu Pengendalian suhu bertolak belakang dengan pengendalian laju alir. Pengendalian suhu biasanya relatif lambat dan bebas noise. Dalam kebanyakan pengendalian suhu, gain proses berbanding terbalik dengan aliran proses. Karakteristik dinamik proses berbeda-beda untuk pengendalian suhu penukar panas, pemanas proses, dan kolom distilasi. Penukar panas memiliki waktu mati cukup besar. Berbeda dengan pemanas proses yang didominasi oleh konstanta waktu. Kebanyakan sistem proses pemanasan berupa sistem mantap (self-regulating). Dengan demikian proses pemanasan dapat dimodelkan sebagai sistem orde satu. Namun demikian oleh adanya dinamika katup kendali, sistem perpipaan, instrumen ukur, dan lain-lain, menyebabkan adanya waktu mati semu. Di samping itu juga terdapat waktu mati sebenarnya, yang berupa kelambatan transpor (transportation lag) akibat waktu yang dibutuhkan aliran energi dari proses ke sensor suhu. Oleh sebab itu pemodelan dengan FOPDT (first-order plus dead time) umumnya lebih baik. Pengendalian suhu pada umumnya ditala dengan gain relatif tinggi atau proportional band sempit dan waktu integral cukup panjang. Berhubung tidak ada noise, pengendalian suhu dapat memakai derivatif. Penambahan derivatif akan membantu mengantisipasi kelambatan yag disebabkan pengukuran suhu. 4.8.4 Pengendalian Tekanan Pengendalian tekanan dibedakan untuk tekanan cair, uap dan gas. Untuk tekanan aliran, dibedakan atas “regulator tekanan” (pressure regulator) dan “regulator tekanan balik” (back pressure regulator). Jika sensor tekanan terletak di bagian hilir katup kendali, lingkar pengendalian disebut regulator tekanan. Sebaliknya, jika sensor tekanan terletak di bagian hulu katup kendali, lingkar pengendalian disebut regulator tekanan balik.
PC
Gas
PC
Gas
(a) Regulator tekanan (b) Regulator tekanan balik
Gambar 4.25 Pengendalian tekanan. Pengendalian tekanan cairan tidak umum dilakukan. Jika diperlukan, tekanan cairan dikendalikan dengan mengatur aliran masuk dan keluar volume cairan terkendali. Karakteristiknya serupa dengan pengendalian aliran. Pengendalian tekanan uap cairan yang dihasilkan dari pendidihan dilakukan dengan mengatur aliran pemanas. Dalam kasus ini sistem proses bersifat mantap (self-regulating). Sebagai contoh proses penguapan cairan umpan dalam evaporator berikut. Aliran uap melalui penyempitan. Laju alir uap tergantung pada tekanan dan hambatan penyempitan.
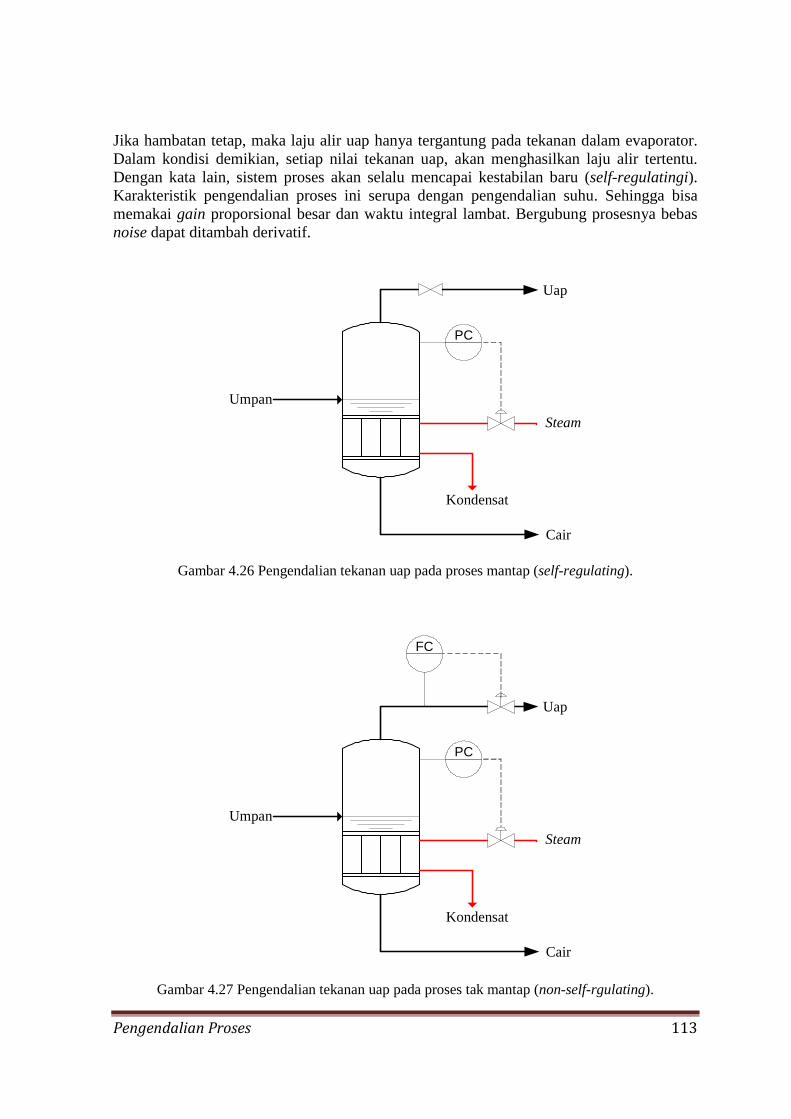
Pengendalian Proses 113
Jika hambatan tetap, maka laju alir uap hanya tergantung pada tekanan dalam evaporator. Dalam kondisi demikian, setiap nilai tekanan uap, akan menghasilkan laju alir tertentu. Dengan kata lain, sistem proses akan selalu mencapai kestabilan baru (self-regulatingi). Karakteristik pengendalian proses ini serupa dengan pengendalian suhu. Sehingga bisa memakai gain proporsional besar dan waktu integral lambat. Bergubung prosesnya bebas noise dapat ditambah derivatif.
Steam
Umpan
Uap
Kondensat
PC
Cair
Gambar 4.26 Pengendalian tekanan uap pada proses mantap (self-regulating).
Steam
Umpan
Uap
Kondensat
PC
Cair
FC
Gambar 4.27 Pengendalian tekanan uap pada proses tak mantap (non-self-rgulating).
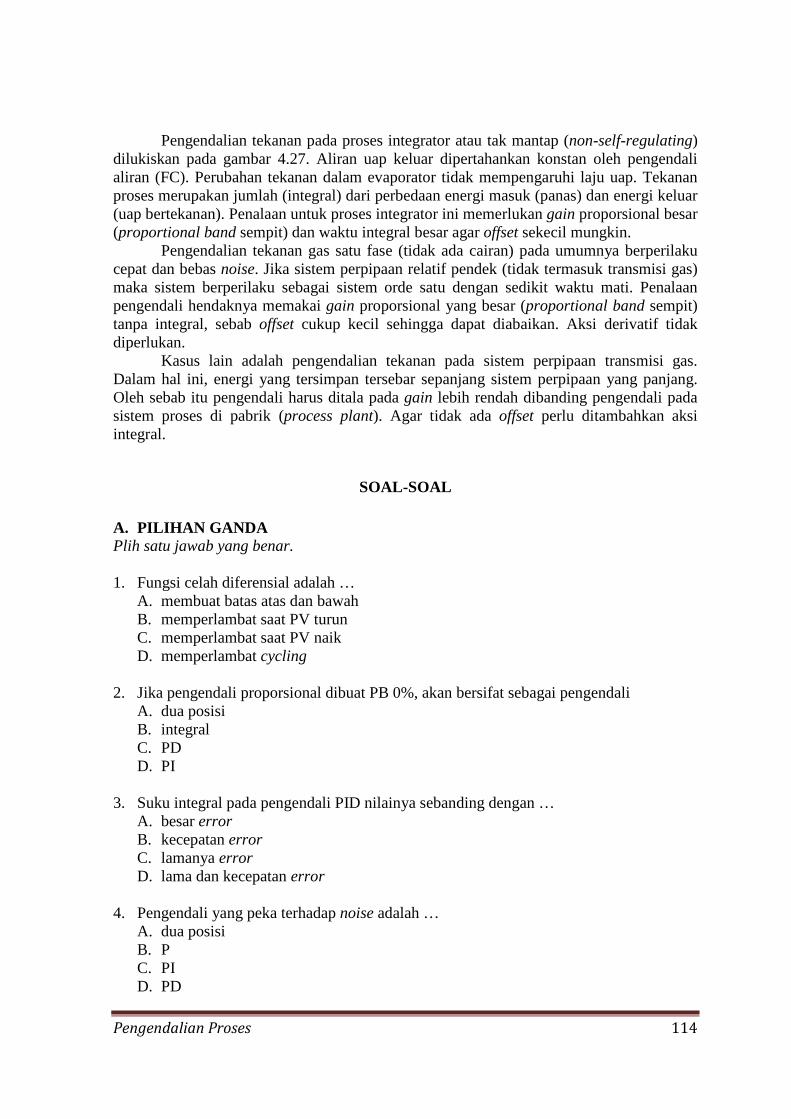
Pengendalian Proses 114
Pengendalian tekanan pada proses integrator atau tak mantap (non-self-regulating) dilukiskan pada gambar 4.27. Aliran uap keluar dipertahankan konstan oleh pengendali aliran (FC). Perubahan tekanan dalam evaporator tidak mempengaruhi laju uap. Tekanan proses merupakan jumlah (integral) dari perbedaan energi masuk (panas) dan energi keluar (uap bertekanan). Penalaan untuk proses integrator ini memerlukan gain proporsional besar (proportional band sempit) dan waktu integral besar agar offset sekecil mungkin. Pengendalian tekanan gas satu fase (tidak ada cairan) pada umumnya berperilaku cepat dan bebas noise. Jika sistem perpipaan relatif pendek (tidak termasuk transmisi gas) maka sistem berperilaku sebagai sistem orde satu dengan sedikit waktu mati. Penalaan pengendali hendaknya memakai gain proporsional yang besar (proportional band sempit) tanpa integral, sebab offset cukup kecil sehingga dapat diabaikan. Aksi derivatif tidak diperlukan. Kasus lain adalah pengendalian tekanan pada sistem perpipaan transmisi gas. Dalam hal ini, energi yang tersimpan tersebar sepanjang sistem perpipaan yang panjang. Oleh sebab itu pengendali harus ditala pada gain lebih rendah dibanding pengendali pada sistem proses di pabrik (process plant). Agar tidak ada offset perlu ditambahkan aksi integral.
SOAL-SOAL A. PILIHAN GANDA Plih satu jawab yang benar. 1. Fungsi celah diferensial adalah …
A. membuat batas atas dan bawah B. memperlambat saat PV turun C. memperlambat saat PV naik D. memperlambat cycling
2. Jika pengendali proporsional dibuat PB 0%, akan bersifat sebagai pengendali
A. dua posisi B. integral C. PD D. PI
3. Suku integral pada pengendali PID nilainya sebanding dengan …
A. besar error B. kecepatan error C. lamanya error D. lama dan kecepatan error
4. Pengendali yang peka terhadap noise adalah …
A. dua posisi B. P C. PI D. PD

Pengendalian Proses 115
5. Respons aksi PID berikut.
Dari gambar tersebut A. τi = 4 menit, τd = 1 menit B. τi = 1 menit, τd = 4 menit C. τi = 0,25 menit, τd = 4 menit D. τi = 4 menit, τd = 4 menit
6. Persamaan pengendali PID standar ISA adalah …
A. ∫ ++= oi
cc uedt
KeKu
τ
B. ∫ ++= oicc uedtKeKu τ
C. ∫ +++= odci
cc u
dt
deKedt
KeKu τ
τ
D. ∫ +++= od
cicc u
dt
deKedtKeKu
ττ
7. Grafik antara sinyal kendali (u) dan PV sebagai berikut.
Besar proportional band ... A. 20% B. 40% C. 60% D. 100%
8. Persamaan u = Kce + uo. Pada dasarnya ‘uo’ adalah … A. keluaran pengendali saat Kc=0 B. keluaran pengendali saat e = 0 C. keluaran pengendali saat u = 0 D. keluaran pengendali saat tunak
Pengendalian Proses 116
9. Proportional band adalah …
A. persen error yang menghasilkan perubahan keluaran 100% B. persentase keluaran oleh perubahan error 100% C. persentase gain proporsional D. persentase offset
10. Respons step pengendali PI pada perubahan
error 5%. Nilai PB, Kc, dan τi adalah ... A. 50 %; 2 dan 4 menit B. 50 %; 2 dan -4 menit C. 200 %; 2 dan 4 menit D. 200 %; 2 dan -4 menit
11. Offset pada pengendalian proporsional saja dapat diperkecil dengan cara
A. memperkecil gain dan bias B. memperkecil gain C. memperkecil PB D. memperbesar PB
12. Fungsi aksi integral adalah … A. mempercepat respon B. menghilangkan offset C. mengurangi osilasi D. membuat sistem lebih stabil
13. Respons pengendalian PI untuk kurva-2 terjadi jika
Kc = 2 dan τi = 4 menit. Maka kurva 1 terjadi jika .. A. τi < 4 B. Kc > 2 C. Kc < 2 atau τi > 4 D. Kc > 2 atau τi < 4
14. Fungsi aksi derivatif adalah A. menghilangkan offset B. menghilangkan error C. memperkecil overshoot D. menghilangkan bias
15. Tuning pengendali dengan metode step response dilakukan dengan cara,
A. loop terbuka dan posisi otomatik B. loop terbuka dan posisi manual C. loop tertutup dan posisi otomatik D. loop tertutup dan posisi manual
1
2
3
Pengendalian Proses 117
16. Pada proses dengan banyak turbulensi atau fluktuasi nilai variabel proses terkendali, tidak cocok memakai aksi derivatif, sebab aksi derivatif merespons… A. lamanya error B. besar error C. kecepatan error D. besar dan lamanya error
17. Sebuah proses memiliki tetapan waktu 5 menit dan dead time 4 menit. Proses tidak mengandung noise. Diinginkan tidak ada offset dan tidak berosilasi terus menerus. Maka jenis pengendali yang tepat adalah A. on-off B. P C. PI D. PID
18. Sebelum ada gangguan harga keluaran pengendali PI sebesar 50 %. Setelah mendapat gangguan ternyata PV dapat kembali ke nilai SP. Maka keluaran pengendali adalah A. 0% B. 50% C. 100% D. tak dapat dipastikan
19. Tipe proses yang sangat perlu memakai aksi derivatif adalah
A. tinggi cairan B. aliran gas C. suhu D. aliran cairan
20. Pada pengendali proporsional, setelah terjadi perubahan beban yang tetap ternyata
diperoleh, uo=50%, u=60%, Kc=2, maka A. PB = 50% B. offset = 5% C. e = 5% D. jawab A, B, dan C benar
21. Pada pengendali proporsional, jika pengukuran menunjukkan harga yang sama dengan
acuan (setpoint), maka keluaran pengendali … A. tak dapat dipastikan B. 100% C. 50% D. 0%
22. Pada pengendali PD, pernyataan berikut yang benar adalah ...
A. aksi proporsional menggeser fase sebesar -90o B. aksi derivatif menggeser fase sebesar +90o C. aksi proporsional menggeser fase sebesar +90o D. aksi derivatif menggeser fase sebesar -90o
Pengendalian Proses 118
23. Jika pada sistem pengendalian lingkar tertutup diinginkan redaman seperempat amplitudo, maka gain total sistem sebersar … A. 0,1 B. 0,25 C. 0,5 D. 1
24. Dalam sebuah sistem pengendalian diketahui : Gc = Kc, Gv = 0,20 (L/s)/%, Gt = 2 %/K,
Gp = 20 K/(L/s). Maka besarnya PB agar terjadi redaman seperempat amplitudo adalah A. 12,5 % B. 62,5 % C. 80 % D. 160 %
25. Terdapat langkah penalaan, 1. pengendalidisetel ke AUTO 2. pengendalidisetel ke MANUAL 3. melakukan perubahan PV 4. melakukan perubahan MV
Pada penalaan metode kurva reaksi dilakukan ... A. 1 dan 3 B. 2 dan 3 C. 1 dan 4 D. 2 dan 4
B. HITUNGAN 1. Sebuah tangki berdiameter 50 cm. Dari tangki dikeluarkan minyak tanah secara terus
menerus pada laju 60 L/menit. Tinggi permukaan minyak dikendalikan dengan pengendali dua posisi. Aliran minyak ke dalam tangki diatur dengan katup kendali. Saat terbuka penuh aliran minyak 80 L/m, dan tertutup penuh 0 L/menit. Bila celah diferensial sebesar 20 cm, tentukan periode cycling.
2. Sebuah tangki silindris berdiameter 3 m diisi air melalui katup kendali. Katup hanya
mempunyai posisi membuka atau menutup. Saat membuka laju air 2 m3/menit. Tangki dikosongkan secara kontinyu dengan laju 1 m3/menit. Variasi ketinggian air diinginkan antara 3,5 hingga 4,5 meter. Hitung periode cycling.
3. Pengendali proporsional mengendalikan variabel proses dalam daerah suhu 50 … 130
oC dan setpoint pada 75 oC. Pada saat error = 0, keluaran pengendali = 50%. Hitung offset yang terjadi pada saat keluaran pengendali 55% dengan Kc = 0,5.
4. Pengendali proporsional dipakai untuk mengendalikan suhu. Rentang transmiter adalah
273 - 323 K. Pengendali diatur hingga keluarannya berkisar antara 3 psi dan 15 psi yang bersesuaian dengan katup kendali menutup dan membuka penuh. Jika PB 80%,
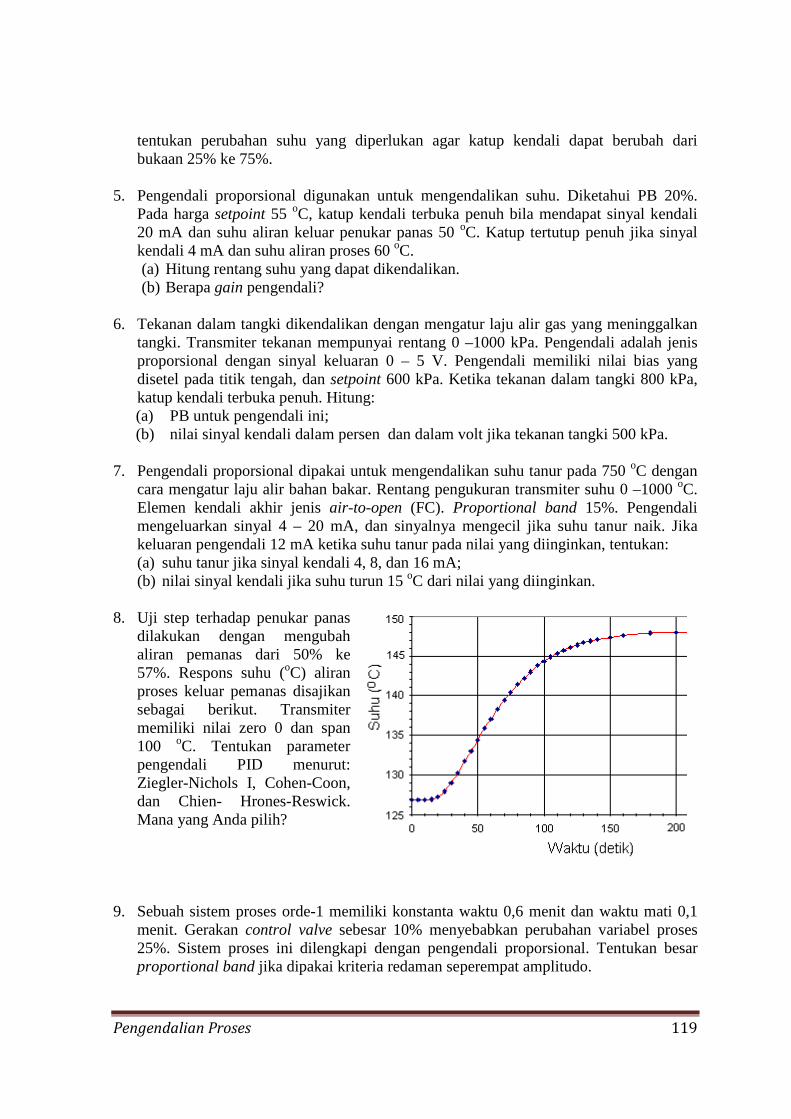
Pengendalian Proses 119
tentukan perubahan suhu yang diperlukan agar katup kendali dapat berubah dari bukaan 25% ke 75%.
5. Pengendali proporsional digunakan untuk mengendalikan suhu. Diketahui PB 20%.
Pada harga setpoint 55 oC, katup kendali terbuka penuh bila mendapat sinyal kendali 20 mA dan suhu aliran keluar penukar panas 50 oC. Katup tertutup penuh jika sinyal kendali 4 mA dan suhu aliran proses 60 oC. (a) Hitung rentang suhu yang dapat dikendalikan. (b) Berapa gain pengendali?
6. Tekanan dalam tangki dikendalikan dengan mengatur laju alir gas yang meninggalkan
tangki. Transmiter tekanan mempunyai rentang 0 –1000 kPa. Pengendali adalah jenis proporsional dengan sinyal keluaran 0 – 5 V. Pengendali memiliki nilai bias yang disetel pada titik tengah, dan setpoint 600 kPa. Ketika tekanan dalam tangki 800 kPa, katup kendali terbuka penuh. Hitung: (a) PB untuk pengendali ini; (b) nilai sinyal kendali dalam persen dan dalam volt jika tekanan tangki 500 kPa.
7. Pengendali proporsional dipakai untuk mengendalikan suhu tanur pada 750 oC dengan
cara mengatur laju alir bahan bakar. Rentang pengukuran transmiter suhu 0 –1000 oC. Elemen kendali akhir jenis air-to-open (FC). Proportional band 15%. Pengendali mengeluarkan sinyal 4 – 20 mA, dan sinyalnya mengecil jika suhu tanur naik. Jika keluaran pengendali 12 mA ketika suhu tanur pada nilai yang diinginkan, tentukan: (a) suhu tanur jika sinyal kendali 4, 8, dan 16 mA; (b) nilai sinyal kendali jika suhu turun 15 oC dari nilai yang diinginkan.
8. Uji step terhadap penukar panas dilakukan dengan mengubah aliran pemanas dari 50% ke 57%. Respons suhu (oC) aliran proses keluar pemanas disajikan sebagai berikut. Transmiter memiliki nilai zero 0 dan span 100 oC. Tentukan parameter pengendali PID menurut: Ziegler-Nichols I, Cohen-Coon, dan Chien- Hrones-Reswick. Mana yang Anda pilih?
9. Sebuah sistem proses orde-1 memiliki konstanta waktu 0,6 menit dan waktu mati 0,1
menit. Gerakan control valve sebesar 10% menyebabkan perubahan variabel proses 25%. Sistem proses ini dilengkapi dengan pengendali proporsional. Tentukan besar proportional band jika dipakai kriteria redaman seperempat amplitudo.
Pengendalian Proses 120
BAB-5 STRATEGI PENGENDALIAN LANJUT
TUJUAN PEMBELAJARAN UMUM Memahami mekanisme pengendalian kompleks yang terdiri atas lebih dari satu lingkar TUJUAN PEMBELAJARAN KHUSUS Setelah menyelesaikan bab ini, mahasiswa diharapkan dapat: 1) Menyebutkan tujuan pengendalian umpan maju 2) Menyebutkan tujuan pengendalian cascade 3) Menyebutkan tujuan pengendalian rasio 4) Menyebutkan tujuan pengendalian split-range 5) Menyebutkan tujuan pengendalian override 6) Menggambar diagram pengendalian umpan maju 7) Menggambar diagram pengendalian cascade 8) Menggambar diagram pengendalian rasio 9) Menggambar diagram pengendalian split-range 10) Menggambar diagram pengendalian override 11) Menentukan nilai rasio pada dua variabel atau lebih
Pengendalian Proses 121
Sistem proses di pabrik hampir dapat dipastikan merupakan sistem kompleks. Hal demikian menyebabkan perilaku sistem memiliki orde tinggi dan waktu mati besar yang berakibat tanggapan variabel proses menjadi lambat. Belum lagi adanya gangguan yang sukar diatasi dengan pengendalian umpan balik. Persoalan menjadi kian rumit disebabkan adanya kenyataan bahwa sistem proses memiliki banyak masukan dan banyak keluaran. Menghadapi persoalan demikian ternyata sistem pengendalian sederhana kurang dapat diterapkan dengan baik. Bahkan terhadap sistem yang memiliki banyak masukan dan banyak keluaran tidak dapat dipakai pengendali PID biasa.
5.1 PENGENDALIAN BERTINGKAT (CASCADE CONTROL) 5.1.1 PRINSIP PENGENDALIAN Prinsip pengendalian bertingkat adalah meredam pengaruh gangguan yang masuk melalui manipulated variable dengan memakai lingkar pengendali tambahan (primary controller, inner controller, slave controller, sub-controller) yang terletak di dalam lingkar utama (secondary controller, outer control, master control, atau main controller). Jika gangguan dapat diredam oleh pengendali tambahan, maka gangguan dapat mudah ditangani secara efisien dan tanggapan sistem menjadi lebih baik. Dengan demikian akan diperoleh pengendalian yang halus, akurat, dan cepat. Jadi tujuan pengendalian kaskade adalah:
• Meredam gangguan yang masuk melalui manipulated variable. • Menambah keamanan operasi. • Memperhalus pengendalian (memperbaiki linieritas). • Menambah akurasi pengendalian Pengendalian cascade memerlukan dua pengendali. Satu pengendali bertindak
sebagai induk (master) dan yang lain sebagai hamba (slave). Sehingga terbentuk dua lingkar pengendalian. Lingkar pengendalian dalam (inner loop) menjadi bagian dari lingkar luar (outer loop). Satu hal penting di sini, tanggapan lingkar dalam (inner loop) harus lebih cepat paling tidak tiga kali lingkar luar (outer loop), tetapi biasanya 10 sampai 20 kalinya. Dengan kata lain konstanta waktu lingkar salam harus jauh lebih kecil dibanding lingkar luar primer.
Contoh-5.1 Pengendalian Suhu reaktor. Sebagai contoh pengendalian suhu dalam reaktor dengan memakai air sebagai medium pendingin. Suhu reaktor dikendalikan dengan memanipulasi laju alir air. Di sini terdapat gangguan, yang bila tidak diperhatikan bisa menjadi masalah serius, yaitu suhu. Begitu terjadi perubahan, pengendali suhu tidak segera merasakan perubahan, sampai suhu reaktor benar-benar berubah. Perubahan suhu jaket dapat diatasi bila terhadap laju alir air juga dilakukan pengendalian. Dengan demikian terdapat dua pengendali. Pertama, pengendali suhu reaktor (TC-1) sebagai pengendali induk (master controller atau primary controller). Kedua, pengendali suhu jaket (TC-2) sebagai pengendali hamba (slave controller atau secondary controller). Suhu jaket dikendalikan dengan mengatur laju alir air. Jika suhu air masuk jaket berubah, suhu jaket berubah meskipun laju alirnya tetap. Perubahan suhu jaket menunjukkan perubahan gangguan.
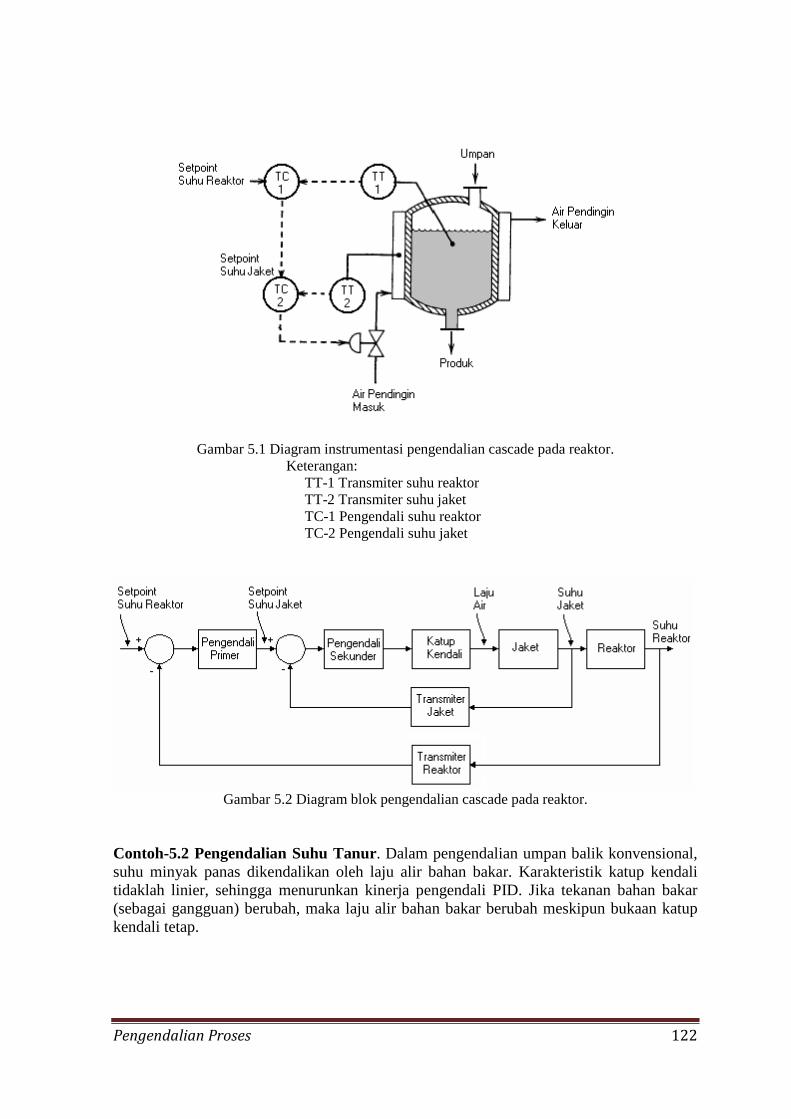
Pengendalian Proses 122
Gambar 5.1 Diagram instrumentasi pengendalian cascade pada reaktor.
Keterangan: TT-1 Transmiter suhu reaktor TT-2 Transmiter suhu jaket TC-1 Pengendali suhu reaktor TC-2 Pengendali suhu jaket
Gambar 5.2 Diagram blok pengendalian cascade pada reaktor.
Contoh-5.2 Pengendalian Suhu Tanur. Dalam pengendalian umpan balik konvensional, suhu minyak panas dikendalikan oleh laju alir bahan bakar. Karakteristik katup kendali tidaklah linier, sehingga menurunkan kinerja pengendali PID. Jika tekanan bahan bakar (sebagai gangguan) berubah, maka laju alir bahan bakar berubah meskipun bukaan katup kendali tetap.
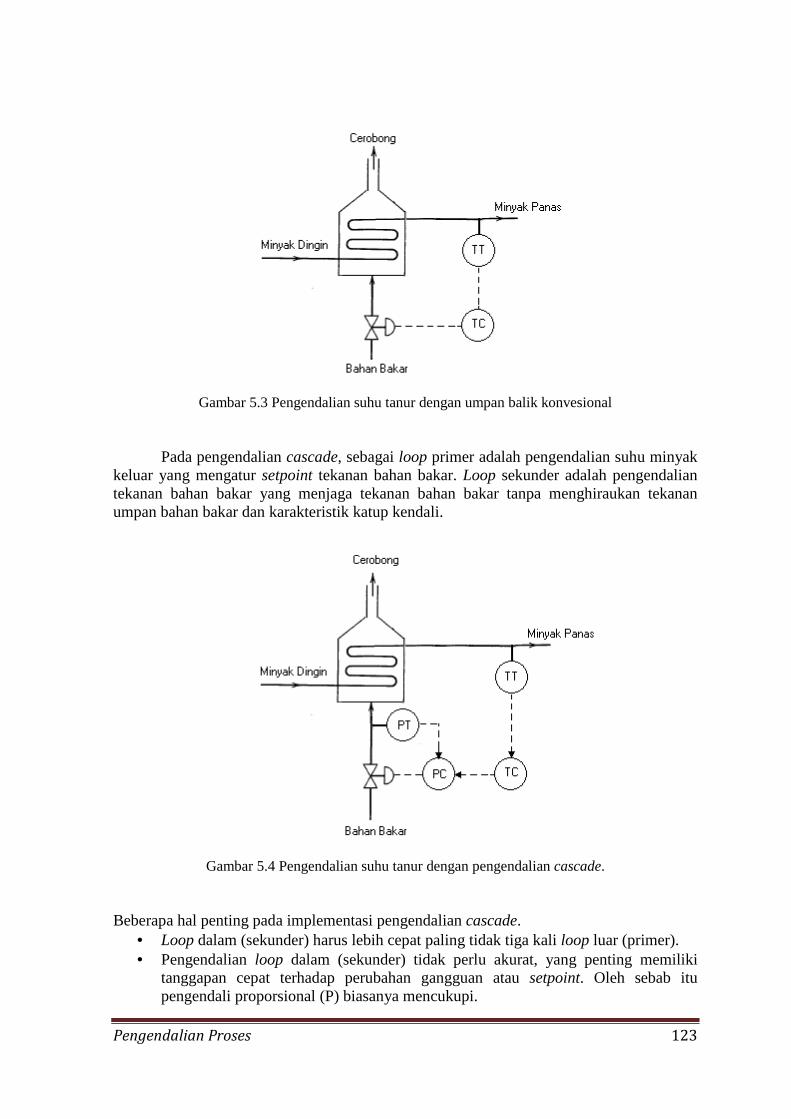
Pengendalian Proses 123
Gambar 5.3 Pengendalian suhu tanur dengan umpan balik konvesional
Pada pengendalian cascade, sebagai loop primer adalah pengendalian suhu minyak keluar yang mengatur setpoint tekanan bahan bakar. Loop sekunder adalah pengendalian tekanan bahan bakar yang menjaga tekanan bahan bakar tanpa menghiraukan tekanan umpan bahan bakar dan karakteristik katup kendali.
Gambar 5.4 Pengendalian suhu tanur dengan pengendalian cascade.
Beberapa hal penting pada implementasi pengendalian cascade.
• Loop dalam (sekunder) harus lebih cepat paling tidak tiga kali loop luar (primer). • Pengendalian loop dalam (sekunder) tidak perlu akurat, yang penting memiliki
tanggapan cepat terhadap perubahan gangguan atau setpoint. Oleh sebab itu pengendali proporsional (P) biasanya mencukupi.
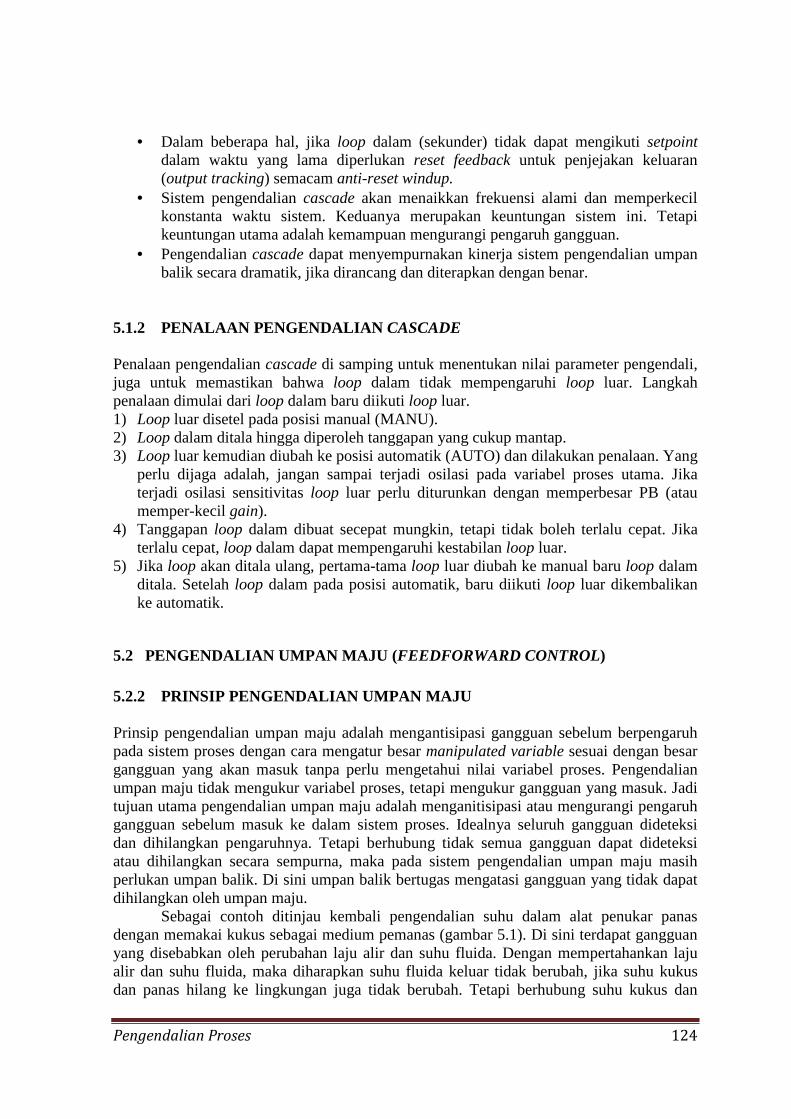
Pengendalian Proses 124
• Dalam beberapa hal, jika loop dalam (sekunder) tidak dapat mengikuti setpoint dalam waktu yang lama diperlukan reset feedback untuk penjejakan keluaran (output tracking) semacam anti-reset windup.
• Sistem pengendalian cascade akan menaikkan frekuensi alami dan memperkecil konstanta waktu sistem. Keduanya merupakan keuntungan sistem ini. Tetapi keuntungan utama adalah kemampuan mengurangi pengaruh gangguan.
• Pengendalian cascade dapat menyempurnakan kinerja sistem pengendalian umpan balik secara dramatik, jika dirancang dan diterapkan dengan benar.
5.1.2 PENALAAN PENGENDALIAN CASCADE Penalaan pengendalian cascade di samping untuk menentukan nilai parameter pengendali, juga untuk memastikan bahwa loop dalam tidak mempengaruhi loop luar. Langkah penalaan dimulai dari loop dalam baru diikuti loop luar. 1) Loop luar disetel pada posisi manual (MANU). 2) Loop dalam ditala hingga diperoleh tanggapan yang cukup mantap. 3) Loop luar kemudian diubah ke posisi automatik (AUTO) dan dilakukan penalaan. Yang
perlu dijaga adalah, jangan sampai terjadi osilasi pada variabel proses utama. Jika terjadi osilasi sensitivitas loop luar perlu diturunkan dengan memperbesar PB (atau memper-kecil gain).
4) Tanggapan loop dalam dibuat secepat mungkin, tetapi tidak boleh terlalu cepat. Jika terlalu cepat, loop dalam dapat mempengaruhi kestabilan loop luar.
5) Jika loop akan ditala ulang, pertama-tama loop luar diubah ke manual baru loop dalam ditala. Setelah loop dalam pada posisi automatik, baru diikuti loop luar dikembalikan ke automatik.
5.2 PENGENDALIAN UMPAN MAJU (FEEDFORWARD CONTROL) 5.2.2 PRINSIP PENGENDALIAN UMPAN MAJU Prinsip pengendalian umpan maju adalah mengantisipasi gangguan sebelum berpengaruh pada sistem proses dengan cara mengatur besar manipulated variable sesuai dengan besar gangguan yang akan masuk tanpa perlu mengetahui nilai variabel proses. Pengendalian umpan maju tidak mengukur variabel proses, tetapi mengukur gangguan yang masuk. Jadi tujuan utama pengendalian umpan maju adalah menganitisipasi atau mengurangi pengaruh gangguan sebelum masuk ke dalam sistem proses. Idealnya seluruh gangguan dideteksi dan dihilangkan pengaruhnya. Tetapi berhubung tidak semua gangguan dapat dideteksi atau dihilangkan secara sempurna, maka pada sistem pengendalian umpan maju masih perlukan umpan balik. Di sini umpan balik bertugas mengatasi gangguan yang tidak dapat dihilangkan oleh umpan maju. Sebagai contoh ditinjau kembali pengendalian suhu dalam alat penukar panas dengan memakai kukus sebagai medium pemanas (gambar 5.1). Di sini terdapat gangguan yang disebabkan oleh perubahan laju alir dan suhu fluida. Dengan mempertahankan laju alir dan suhu fluida, maka diharapkan suhu fluida keluar tidak berubah, jika suhu kukus dan panas hilang ke lingkungan juga tidak berubah. Tetapi berhubung suhu kukus dan
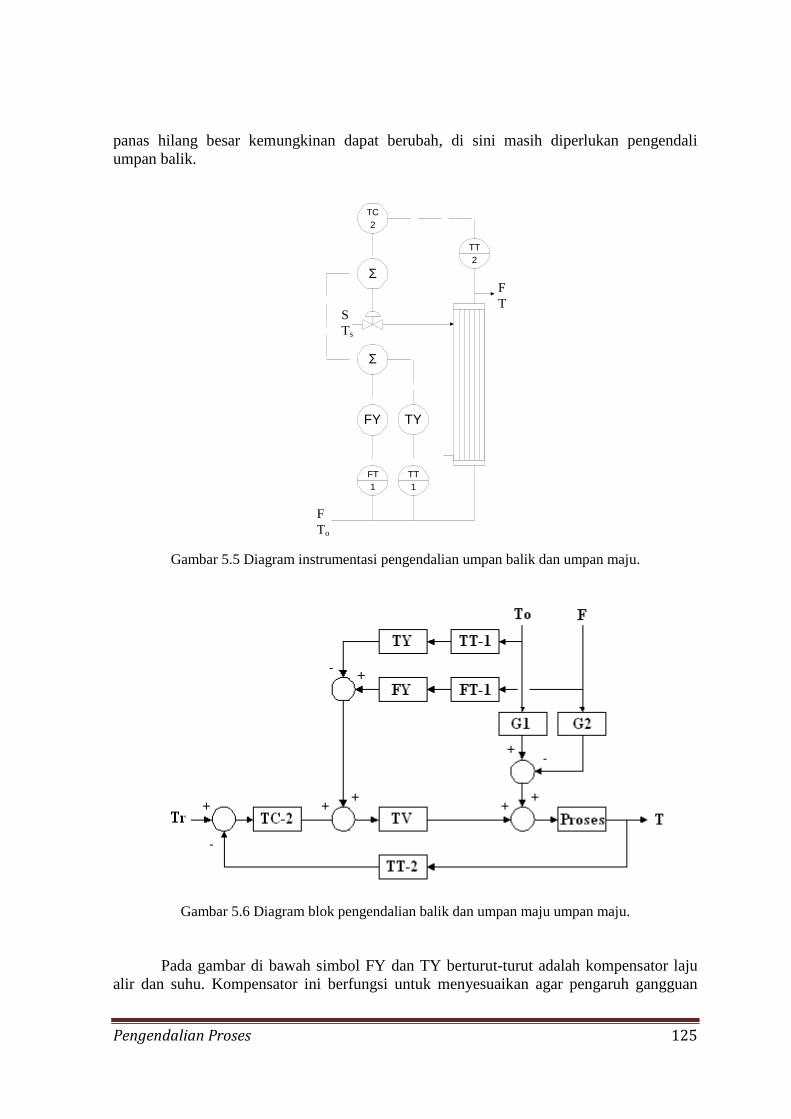
Pengendalian Proses 125
panas hilang besar kemungkinan dapat berubah, di sini masih diperlukan pengendali umpan balik.
TY
Σ
FY
TT1
FT1
TC2
TT2
Σ
Gambar 5.5 Diagram instrumentasi pengendalian umpan balik dan umpan maju.
Gambar 5.6 Diagram blok pengendalian balik dan umpan maju umpan maju. Pada gambar di bawah simbol FY dan TY berturut-turut adalah kompensator laju
alir dan suhu. Kompensator ini berfungsi untuk menyesuaikan agar pengaruh gangguan
F To
F T
S Ts
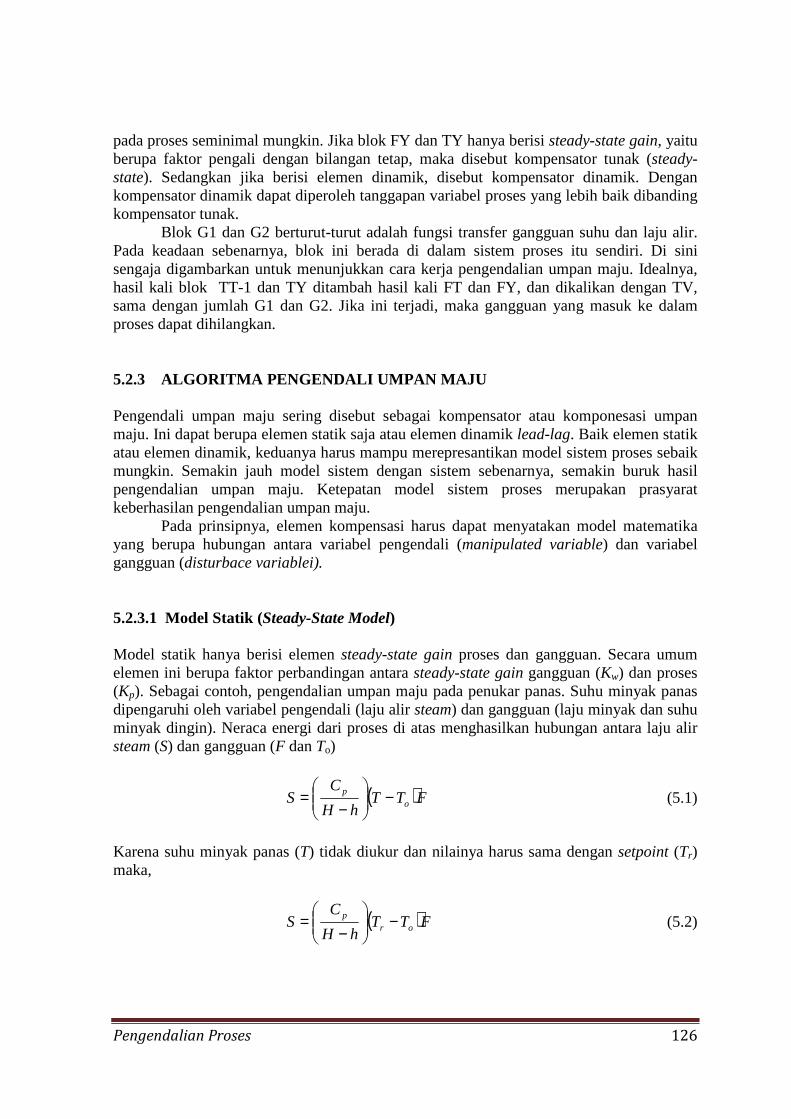
Pengendalian Proses 126
pada proses seminimal mungkin. Jika blok FY dan TY hanya berisi steady-state gain, yaitu berupa faktor pengali dengan bilangan tetap, maka disebut kompensator tunak (steady-state). Sedangkan jika berisi elemen dinamik, disebut kompensator dinamik. Dengan kompensator dinamik dapat diperoleh tanggapan variabel proses yang lebih baik dibanding kompensator tunak.
Blok G1 dan G2 berturut-turut adalah fungsi transfer gangguan suhu dan laju alir. Pada keadaan sebenarnya, blok ini berada di dalam sistem proses itu sendiri. Di sini sengaja digambarkan untuk menunjukkan cara kerja pengendalian umpan maju. Idealnya, hasil kali blok TT-1 dan TY ditambah hasil kali FT dan FY, dan dikalikan dengan TV, sama dengan jumlah G1 dan G2. Jika ini terjadi, maka gangguan yang masuk ke dalam proses dapat dihilangkan. 5.2.3 ALGORITMA PENGENDALI UMPAN MAJU Pengendali umpan maju sering disebut sebagai kompensator atau komponesasi umpan maju. Ini dapat berupa elemen statik saja atau elemen dinamik lead-lag. Baik elemen statik atau elemen dinamik, keduanya harus mampu merepresantikan model sistem proses sebaik mungkin. Semakin jauh model sistem dengan sistem sebenarnya, semakin buruk hasil pengendalian umpan maju. Ketepatan model sistem proses merupakan prasyarat keberhasilan pengendalian umpan maju. Pada prinsipnya, elemen kompensasi harus dapat menyatakan model matematika yang berupa hubungan antara variabel pengendali (manipulated variable) dan variabel gangguan (disturbace variablei). 5.2.3.1 Model Statik (Steady-State Model) Model statik hanya berisi elemen steady-state gain proses dan gangguan. Secara umum elemen ini berupa faktor perbandingan antara steady-state gain gangguan (Kw) dan proses (Kp). Sebagai contoh, pengendalian umpan maju pada penukar panas. Suhu minyak panas dipengaruhi oleh variabel pengendali (laju alir steam) dan gangguan (laju minyak dan suhu minyak dingin). Neraca energi dari proses di atas menghasilkan hubungan antara laju alir steam (S) dan gangguan (F dan To)
( )FTThH
CS o
p −
−= (5.1)
Karena suhu minyak panas (T) tidak diukur dan nilainya harus sama dengan setpoint (Tr) maka,
( )FTThH
CS or
p −
−= (5.2)
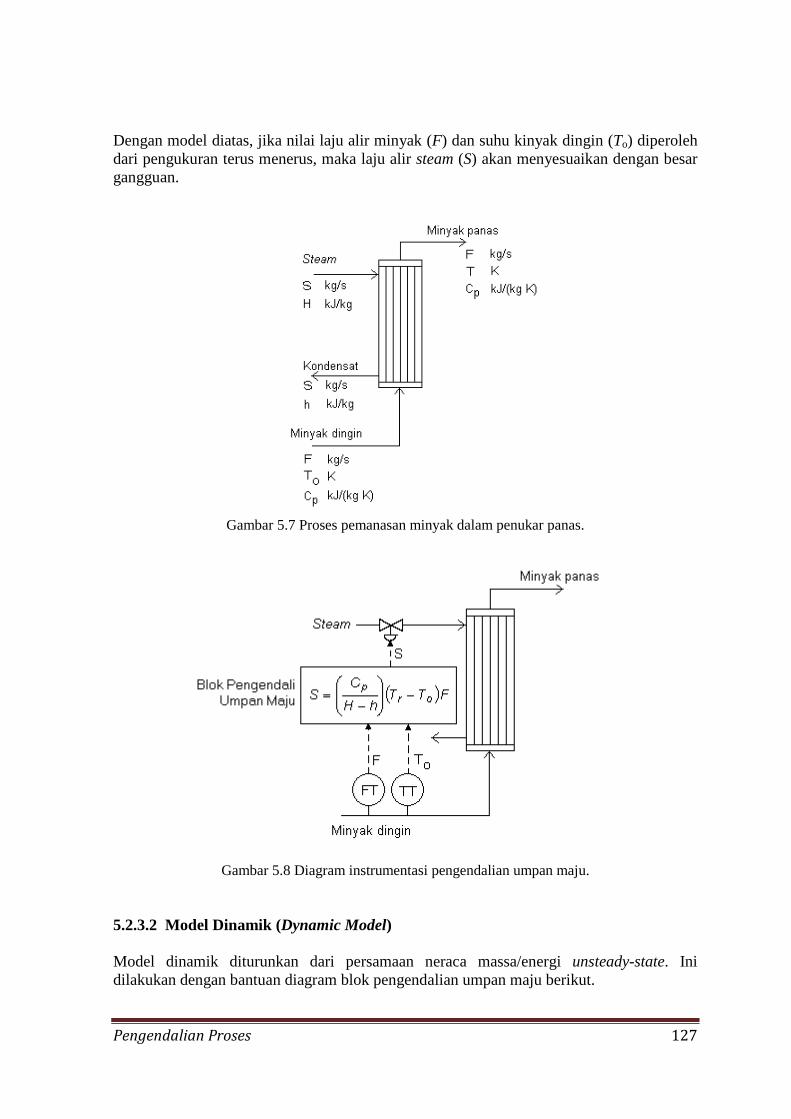
Pengendalian Proses 127
Dengan model diatas, jika nilai laju alir minyak (F) dan suhu kinyak dingin (To) diperoleh dari pengukuran terus menerus, maka laju alir steam (S) akan menyesuaikan dengan besar gangguan.
Gambar 5.7 Proses pemanasan minyak dalam penukar panas.
Gambar 5.8 Diagram instrumentasi pengendalian umpan maju.
5.2.3.2 Model Dinamik (Dynamic Model) Model dinamik diturunkan dari persamaan neraca massa/energi unsteady-state. Ini dilakukan dengan bantuan diagram blok pengendalian umpan maju berikut.
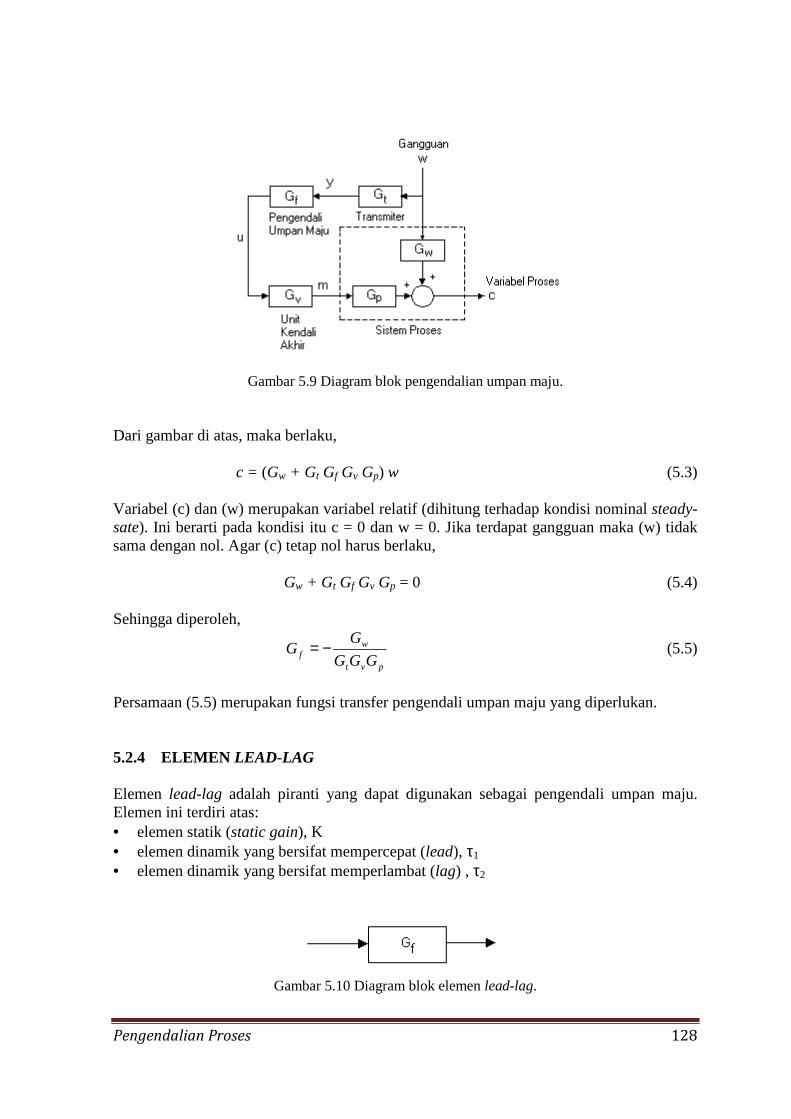
Pengendalian Proses 128
Gambar 5.9 Diagram blok pengendalian umpan maju.
Dari gambar di atas, maka berlaku,
c = (Gw + Gt Gf Gv Gp) w (5.3) Variabel (c) dan (w) merupakan variabel relatif (dihitung terhadap kondisi nominal steady-sate). Ini berarti pada kondisi itu c = 0 dan w = 0. Jika terdapat gangguan maka (w) tidak sama dengan nol. Agar (c) tetap nol harus berlaku,
Gw + Gt Gf Gv Gp = 0 (5.4) Sehingga diperoleh,
pvt
wf GGG
GG −= (5.5)
Persamaan (5.5) merupakan fungsi transfer pengendali umpan maju yang diperlukan. 5.2.4 ELEMEN LEAD-LAG Elemen lead-lag adalah piranti yang dapat digunakan sebagai pengendali umpan maju. Elemen ini terdiri atas: • elemen statik (static gain), K • elemen dinamik yang bersifat mempercepat (lead), τ1 • elemen dinamik yang bersifat memperlambat (lag) , τ2
Gambar 5.10 Diagram blok elemen lead-lag.
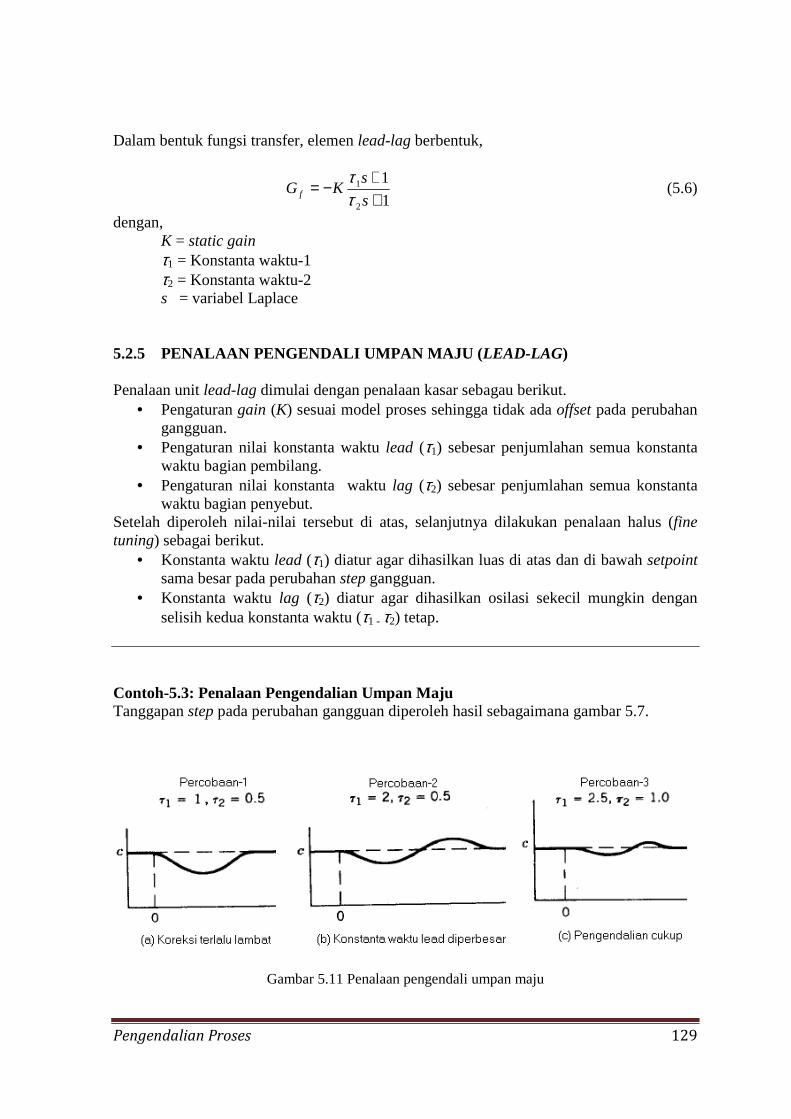
Pengendalian Proses 129
Dalam bentuk fungsi transfer, elemen lead-lag berbentuk,
1
1
2
1
++−=
s
sKG f τ
τ (5.6)
dengan, K = static gain τ1 = Konstanta waktu-1 τ2 = Konstanta waktu-2 s = variabel Laplace
5.2.5 PENALAAN PENGENDALI UMPAN MAJU (LEAD-LAG) Penalaan unit lead-lag dimulai dengan penalaan kasar sebagau berikut.
• Pengaturan gain (K) sesuai model proses sehingga tidak ada offset pada perubahan gangguan.
• Pengaturan nilai konstanta waktu lead (τ1) sebesar penjumlahan semua konstanta waktu bagian pembilang.
• Pengaturan nilai konstanta waktu lag (τ2) sebesar penjumlahan semua konstanta waktu bagian penyebut.
Setelah diperoleh nilai-nilai tersebut di atas, selanjutnya dilakukan penalaan halus (fine tuning) sebagai berikut.
• Konstanta waktu lead (τ1) diatur agar dihasilkan luas di atas dan di bawah setpoint sama besar pada perubahan step gangguan.
• Konstanta waktu lag (τ2) diatur agar dihasilkan osilasi sekecil mungkin dengan selisih kedua konstanta waktu (τ1 - τ2) tetap.
Contoh-5.3: Penalaan Pengendalian Umpan Maju Tanggapan step pada perubahan gangguan diperoleh hasil sebagaimana gambar 5.7.
Gambar 5.11 Penalaan pengendali umpan maju
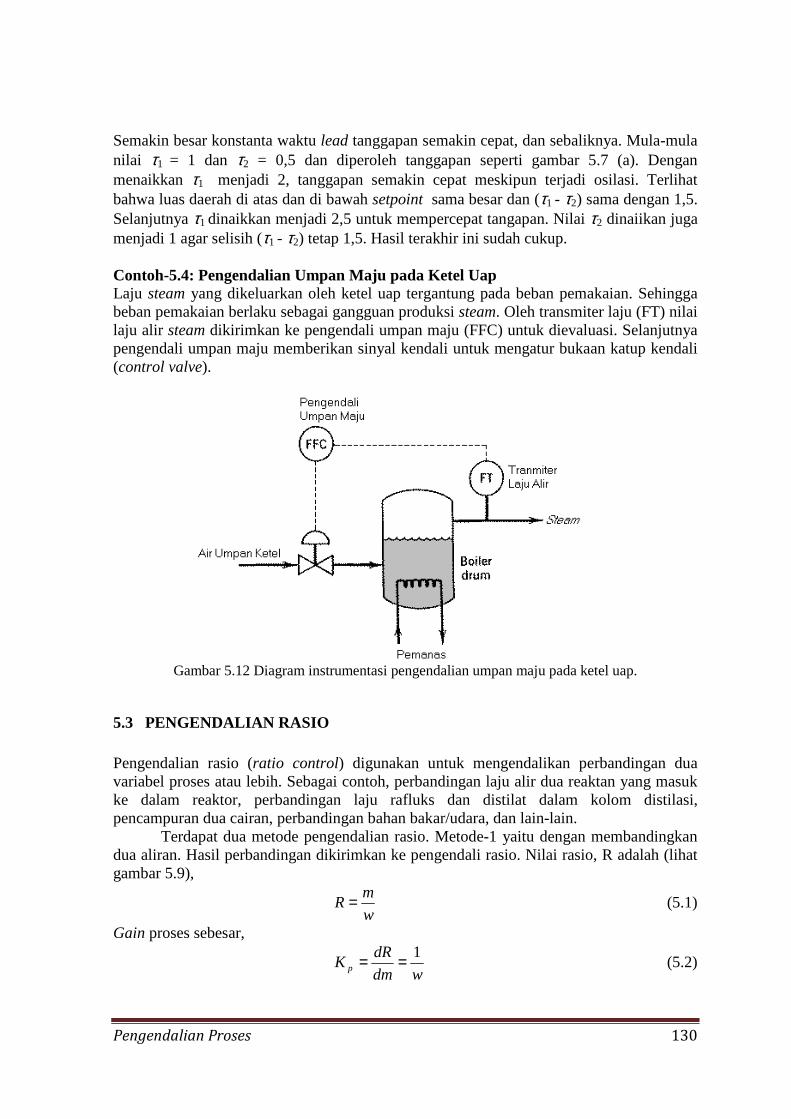
Pengendalian Proses 130
Semakin besar konstanta waktu lead tanggapan semakin cepat, dan sebaliknya. Mula-mula nilai τ1 = 1 dan τ2 = 0,5 dan diperoleh tanggapan seperti gambar 5.7 (a). Dengan menaikkan τ1 menjadi 2, tanggapan semakin cepat meskipun terjadi osilasi. Terlihat bahwa luas daerah di atas dan di bawah setpoint sama besar dan (τ1 - τ2) sama dengan 1,5. Selanjutnya τ1 dinaikkan menjadi 2,5 untuk mempercepat tangapan. Nilai τ2 dinaiikan juga menjadi 1 agar selisih (τ1 - τ2) tetap 1,5. Hasil terakhir ini sudah cukup. Contoh-5.4: Pengendalian Umpan Maju pada Ketel Uap Laju steam yang dikeluarkan oleh ketel uap tergantung pada beban pemakaian. Sehingga beban pemakaian berlaku sebagai gangguan produksi steam. Oleh transmiter laju (FT) nilai laju alir steam dikirimkan ke pengendali umpan maju (FFC) untuk dievaluasi. Selanjutnya pengendali umpan maju memberikan sinyal kendali untuk mengatur bukaan katup kendali (control valve).
Gambar 5.12 Diagram instrumentasi pengendalian umpan maju pada ketel uap.
5.3 PENGENDALIAN RASIO Pengendalian rasio (ratio control) digunakan untuk mengendalikan perbandingan dua variabel proses atau lebih. Sebagai contoh, perbandingan laju alir dua reaktan yang masuk ke dalam reaktor, perbandingan laju rafluks dan distilat dalam kolom distilasi, pencampuran dua cairan, perbandingan bahan bakar/udara, dan lain-lain. Terdapat dua metode pengendalian rasio. Metode-1 yaitu dengan membandingkan dua aliran. Hasil perbandingan dikirimkan ke pengendali rasio. Nilai rasio, R adalah (lihat gambar 5.9),
w
mR = (5.1)
Gain proses sebesar,
wdm
dRK p
1== (5.2)
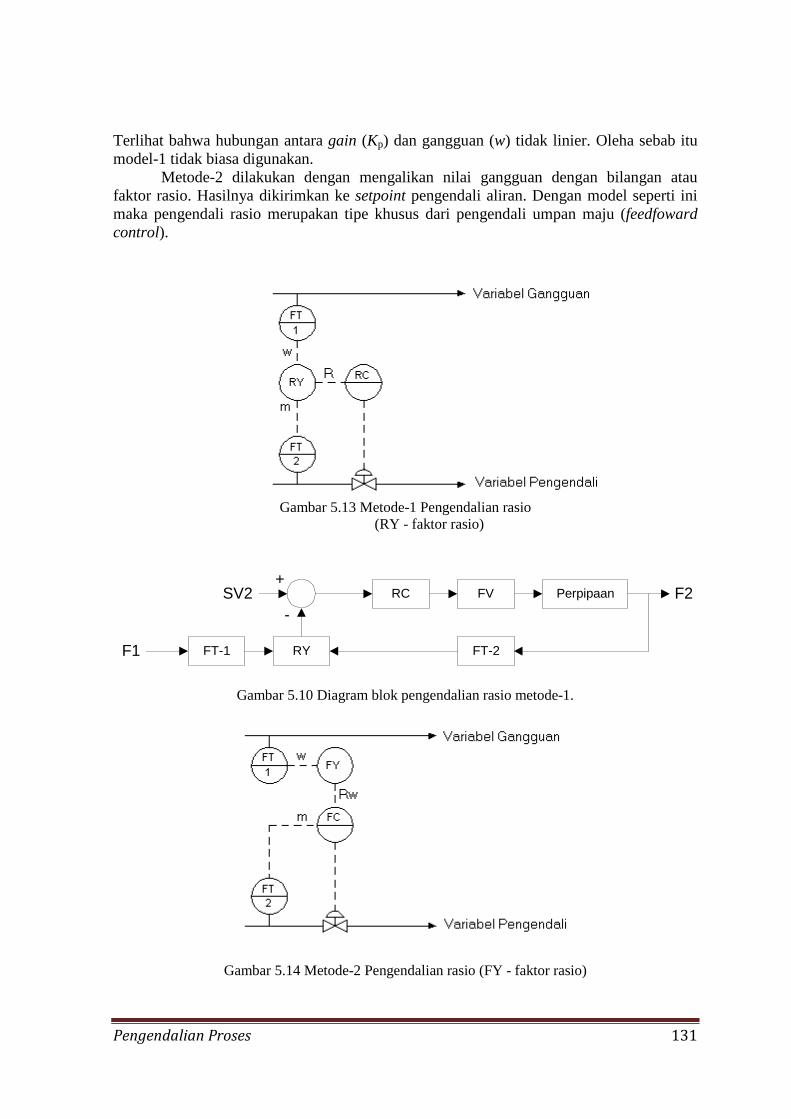
Pengendalian Proses 131
Terlihat bahwa hubungan antara gain (Kp) dan gangguan (w) tidak linier. Oleha sebab itu model-1 tidak biasa digunakan.
Metode-2 dilakukan dengan mengalikan nilai gangguan dengan bilangan atau faktor rasio. Hasilnya dikirimkan ke setpoint pengendali aliran. Dengan model seperti ini maka pengendali rasio merupakan tipe khusus dari pengendali umpan maju (feedfoward control).
Gambar 5.13 Metode-1 Pengendalian rasio (RY - faktor rasio)
RC
RY
FV
FT-2FT-1
Perpipaan
F1
F2SV2+
-
Gambar 5.10 Diagram blok pengendalian rasio metode-1.
Gambar 5.14 Metode-2 Pengendalian rasio (FY - faktor rasio)
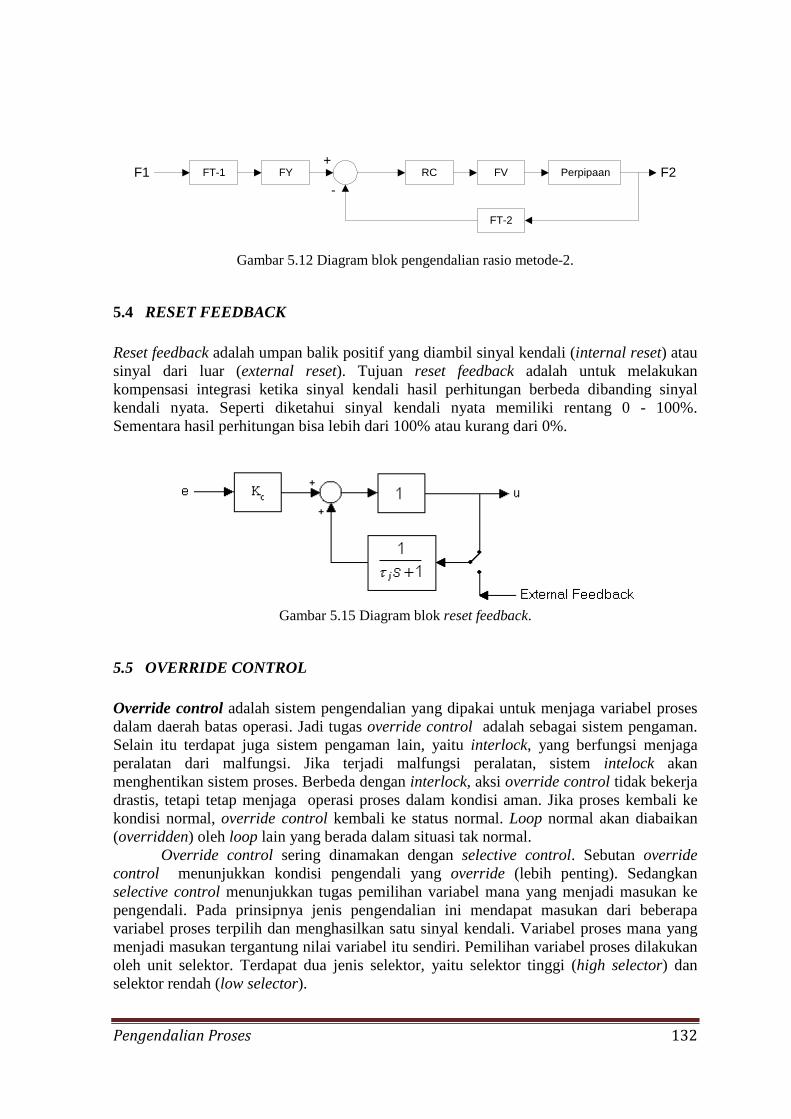
Pengendalian Proses 132
RCFY FV
FT-2
FT-1 PerpipaanF1 F2+
-
Gambar 5.12 Diagram blok pengendalian rasio metode-2.
5.4 RESET FEEDBACK Reset feedback adalah umpan balik positif yang diambil sinyal kendali (internal reset) atau sinyal dari luar (external reset). Tujuan reset feedback adalah untuk melakukan kompensasi integrasi ketika sinyal kendali hasil perhitungan berbeda dibanding sinyal kendali nyata. Seperti diketahui sinyal kendali nyata memiliki rentang 0 - 100%. Sementara hasil perhitungan bisa lebih dari 100% atau kurang dari 0%.
Gambar 5.15 Diagram blok reset feedback.
5.5 OVERRIDE CONTROL Override control adalah sistem pengendalian yang dipakai untuk menjaga variabel proses dalam daerah batas operasi. Jadi tugas override control adalah sebagai sistem pengaman. Selain itu terdapat juga sistem pengaman lain, yaitu interlock, yang berfungsi menjaga peralatan dari malfungsi. Jika terjadi malfungsi peralatan, sistem intelock akan menghentikan sistem proses. Berbeda dengan interlock, aksi override control tidak bekerja drastis, tetapi tetap menjaga operasi proses dalam kondisi aman. Jika proses kembali ke kondisi normal, override control kembali ke status normal. Loop normal akan diabaikan (overridden) oleh loop lain yang berada dalam situasi tak normal. Override control sering dinamakan dengan selective control. Sebutan override control menunjukkan kondisi pengendali yang override (lebih penting). Sedangkan selective control menunjukkan tugas pemilihan variabel mana yang menjadi masukan ke pengendali. Pada prinsipnya jenis pengendalian ini mendapat masukan dari beberapa variabel proses terpilih dan menghasilkan satu sinyal kendali. Variabel proses mana yang menjadi masukan tergantung nilai variabel itu sendiri. Pemilihan variabel proses dilakukan oleh unit selektor. Terdapat dua jenis selektor, yaitu selektor tinggi (high selector) dan selektor rendah (low selector).
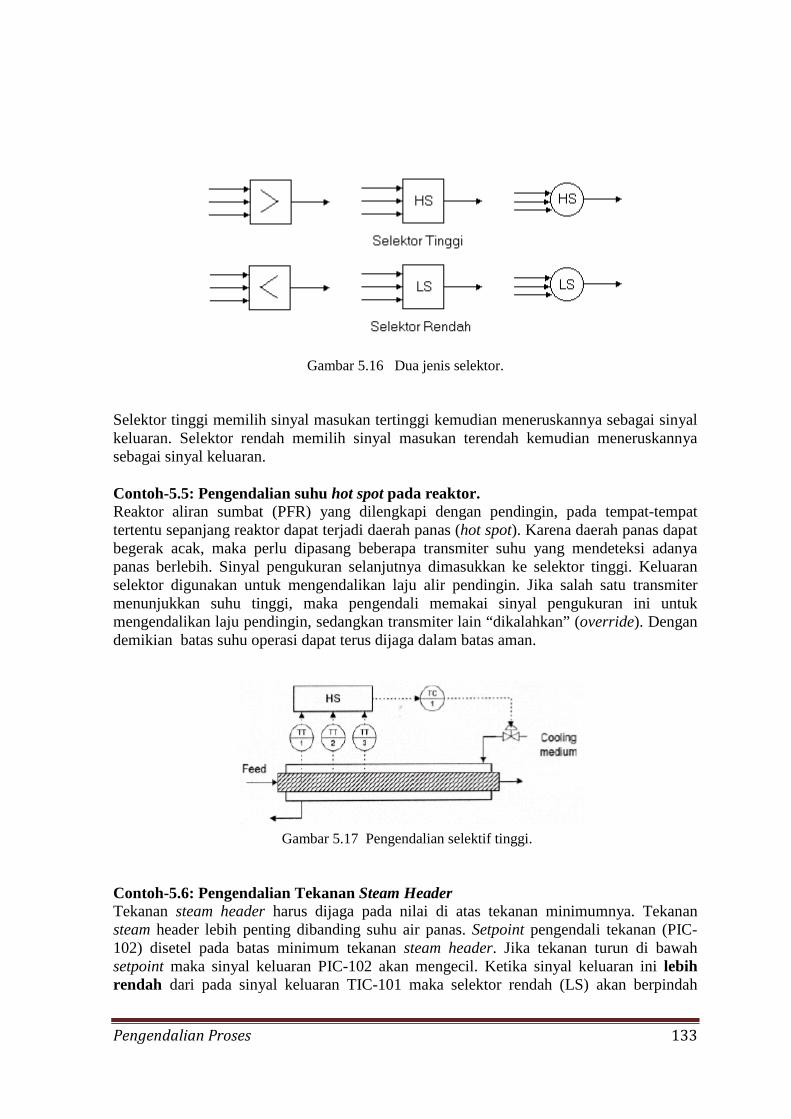
Pengendalian Proses 133
Gambar 5.16 Dua jenis selektor.
Selektor tinggi memilih sinyal masukan tertinggi kemudian meneruskannya sebagai sinyal keluaran. Selektor rendah memilih sinyal masukan terendah kemudian meneruskannya sebagai sinyal keluaran. Contoh-5.5: Pengendalian suhu hot spot pada reaktor. Reaktor aliran sumbat (PFR) yang dilengkapi dengan pendingin, pada tempat-tempat tertentu sepanjang reaktor dapat terjadi daerah panas (hot spot). Karena daerah panas dapat begerak acak, maka perlu dipasang beberapa transmiter suhu yang mendeteksi adanya panas berlebih. Sinyal pengukuran selanjutnya dimasukkan ke selektor tinggi. Keluaran selektor digunakan untuk mengendalikan laju alir pendingin. Jika salah satu transmiter menunjukkan suhu tinggi, maka pengendali memakai sinyal pengukuran ini untuk mengendalikan laju pendingin, sedangkan transmiter lain “dikalahkan” (override). Dengan demikian batas suhu operasi dapat terus dijaga dalam batas aman.
Gambar 5.17 Pengendalian selektif tinggi. Contoh-5.6: Pengendalian Tekanan Steam Header Tekanan steam header harus dijaga pada nilai di atas tekanan minimumnya. Tekanan steam header lebih penting dibanding suhu air panas. Setpoint pengendali tekanan (PIC-102) disetel pada batas minimum tekanan steam header. Jika tekanan turun di bawah setpoint maka sinyal keluaran PIC-102 akan mengecil. Ketika sinyal keluaran ini lebih rendah dari pada sinyal keluaran TIC-101 maka selektor rendah (LS) akan berpindah
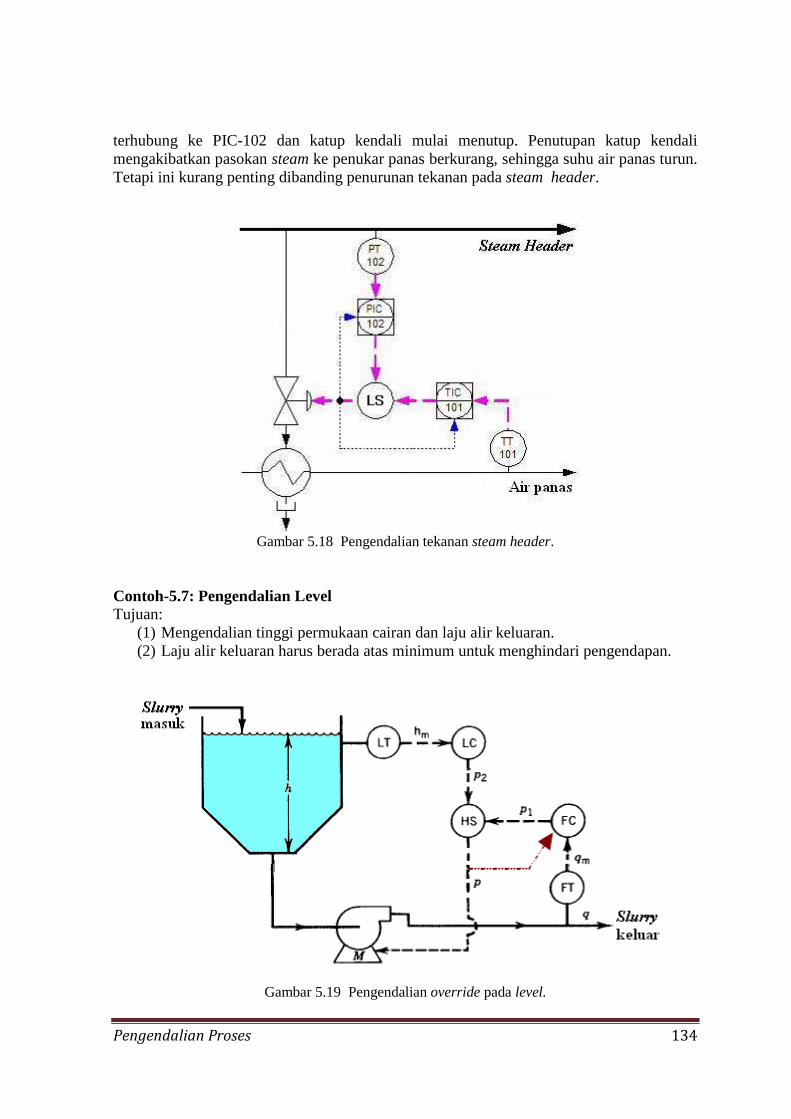
Pengendalian Proses 134
terhubung ke PIC-102 dan katup kendali mulai menutup. Penutupan katup kendali mengakibatkan pasokan steam ke penukar panas berkurang, sehingga suhu air panas turun. Tetapi ini kurang penting dibanding penurunan tekanan pada steam header.
Gambar 5.18 Pengendalian tekanan steam header.
Contoh-5.7: Pengendalian Level Tujuan:
(1) Mengendalian tinggi permukaan cairan dan laju alir keluaran. (2) Laju alir keluaran harus berada atas minimum untuk menghindari pengendapan.
Gambar 5.19 Pengendalian override pada level.
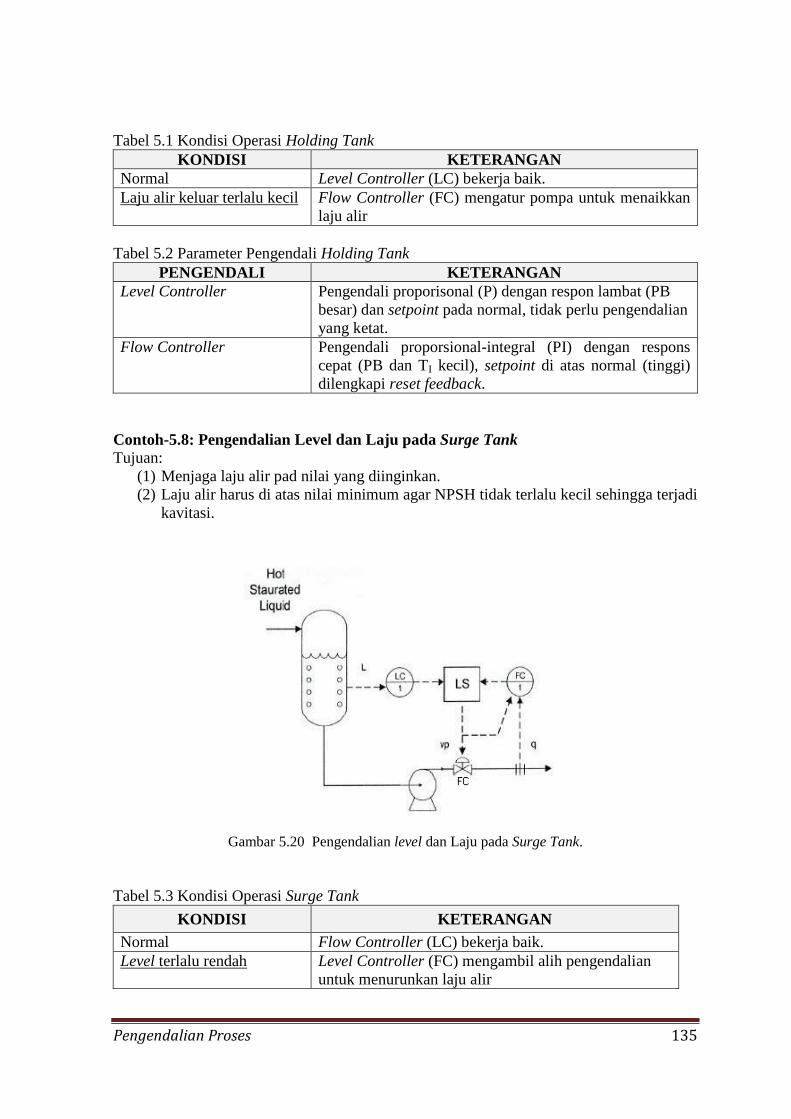
Pengendalian Proses 135
Tabel 5.1 Kondisi Operasi Holding Tank KONDISI KETERANGAN
Normal Level Controller (LC) bekerja baik. Laju alir keluar terlalu kecil Flow Controller (FC) mengatur pompa untuk menaikkan
laju alir Tabel 5.2 Parameter Pengendali Holding Tank
PENGENDALI KETERANGAN Level Controller Pengendali proporisonal (P) dengan respon lambat (PB
besar) dan setpoint pada normal, tidak perlu pengendalian yang ketat.
Flow Controller Pengendali proporsional-integral (PI) dengan respons cepat (PB dan TI kecil), setpoint di atas normal (tinggi) dilengkapi reset feedback.
Contoh-5.8: Pengendalian Level dan Laju pada Surge Tank Tujuan:
(1) Menjaga laju alir pad nilai yang diinginkan. (2) Laju alir harus di atas nilai minimum agar NPSH tidak terlalu kecil sehingga terjadi
kavitasi.
Gambar 5.20 Pengendalian level dan Laju pada Surge Tank.
Tabel 5.3 Kondisi Operasi Surge Tank
KONDISI KETERANGAN Normal Flow Controller (LC) bekerja baik. Level terlalu rendah Level Controller (FC) mengambil alih pengendalian
untuk menurunkan laju alir
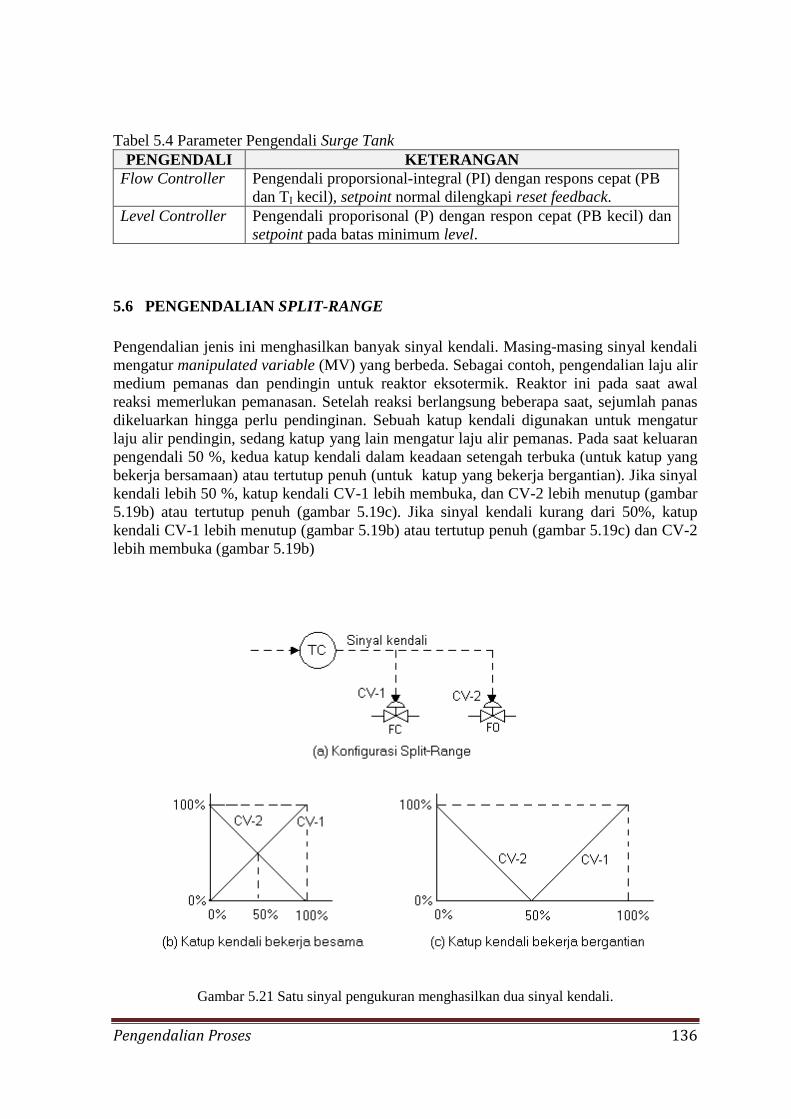
Pengendalian Proses 136
Tabel 5.4 Parameter Pengendali Surge Tank PENGENDALI KETERANGAN
Flow Controller Pengendali proporsional-integral (PI) dengan respons cepat (PB dan TI kecil), setpoint normal dilengkapi reset feedback.
Level Controller Pengendali proporisonal (P) dengan respon cepat (PB kecil) dan setpoint pada batas minimum level.
5.6 PENGENDALIAN SPLIT-RANGE Pengendalian jenis ini menghasilkan banyak sinyal kendali. Masing-masing sinyal kendali mengatur manipulated variable (MV) yang berbeda. Sebagai contoh, pengendalian laju alir medium pemanas dan pendingin untuk reaktor eksotermik. Reaktor ini pada saat awal reaksi memerlukan pemanasan. Setelah reaksi berlangsung beberapa saat, sejumlah panas dikeluarkan hingga perlu pendinginan. Sebuah katup kendali digunakan untuk mengatur laju alir pendingin, sedang katup yang lain mengatur laju alir pemanas. Pada saat keluaran pengendali 50 %, kedua katup kendali dalam keadaan setengah terbuka (untuk katup yang bekerja bersamaan) atau tertutup penuh (untuk katup yang bekerja bergantian). Jika sinyal kendali lebih 50 %, katup kendali CV-1 lebih membuka, dan CV-2 lebih menutup (gambar 5.19b) atau tertutup penuh (gambar 5.19c). Jika sinyal kendali kurang dari 50%, katup kendali CV-1 lebih menutup (gambar 5.19b) atau tertutup penuh (gambar 5.19c) dan CV-2 lebih membuka (gambar 5.19b)
Gambar 5.21 Satu sinyal pengukuran menghasilkan dua sinyal kendali.
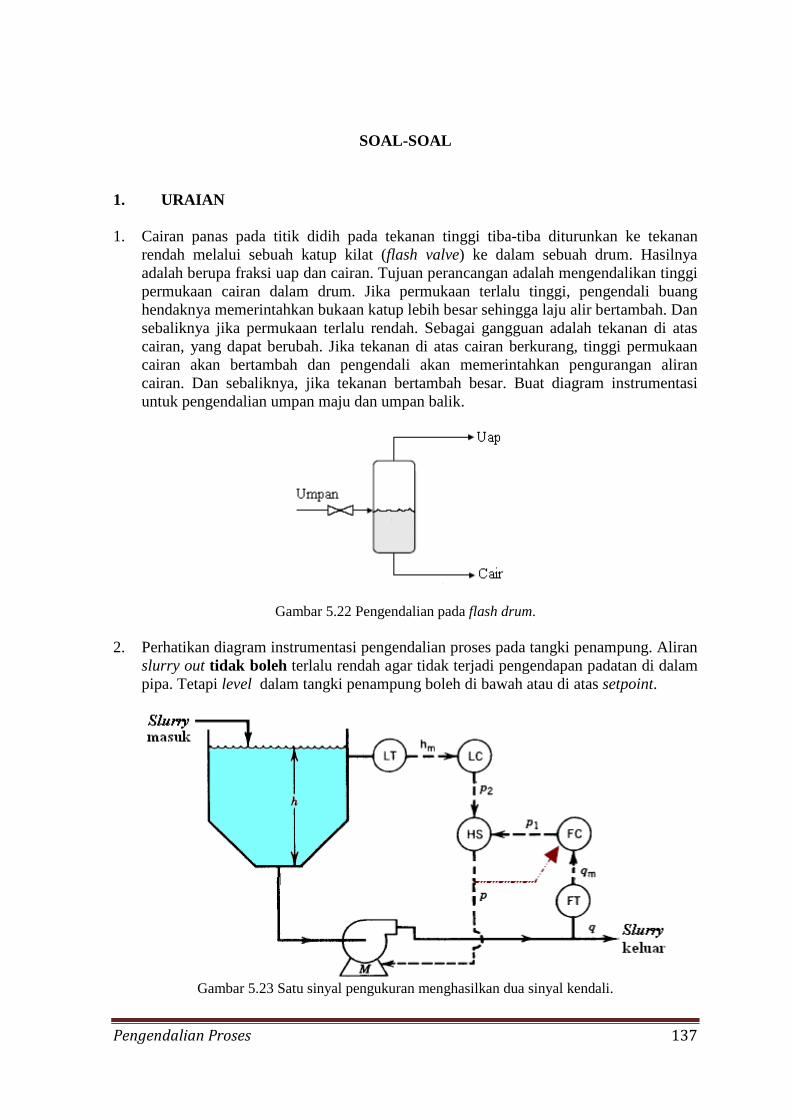
Pengendalian Proses 137
SOAL-SOAL 1. URAIAN 1. Cairan panas pada titik didih pada tekanan tinggi tiba-tiba diturunkan ke tekanan
rendah melalui sebuah katup kilat (flash valve) ke dalam sebuah drum. Hasilnya adalah berupa fraksi uap dan cairan. Tujuan perancangan adalah mengendalikan tinggi permukaan cairan dalam drum. Jika permukaan terlalu tinggi, pengendali buang hendaknya memerintahkan bukaan katup lebih besar sehingga laju alir bertambah. Dan sebaliknya jika permukaan terlalu rendah. Sebagai gangguan adalah tekanan di atas cairan, yang dapat berubah. Jika tekanan di atas cairan berkurang, tinggi permukaan cairan akan bertambah dan pengendali akan memerintahkan pengurangan aliran cairan. Dan sebaliknya, jika tekanan bertambah besar. Buat diagram instrumentasi untuk pengendalian umpan maju dan umpan balik.
Gambar 5.22 Pengendalian pada flash drum. 2. Perhatikan diagram instrumentasi pengendalian proses pada tangki penampung. Aliran
slurry out tidak boleh terlalu rendah agar tidak terjadi pengendapan padatan di dalam pipa. Tetapi level dalam tangki penampung boleh di bawah atau di atas setpoint.
Gambar 5.23 Satu sinyal pengukuran menghasilkan dua sinyal kendali.
Pengendalian Proses 138
1. Sistem pengendalian termasuk override control (Betul)/(Salah)
2. Setpoint LC disetel pada tinggi normal (Betul)/(Salah)
3. LC disetel pada respons lambat dan offset dibolehkan (Betul)/(Salah)
4. Jika (q) terlalu kecil maka p1 > p2 (Betul)/(Salah)
5. Jika (q) terlalu kecil maka FC mengambil alih pengendalian (Betul)/(Salah)
6. Setpoint FC disetel di atas normal (Betul)/(Salah)
7. FC disetel pada respons cepat dan tidak boleh ada offset (Betul)/(Salah)
8. Jika level terlalu tinggi LC mengambil alih pengendalian (Betul)/(Salah)
2. PILIHAN GANDA 1. Dari hal-hal berikut yang bukan tujuan pengendalian cascade adalah
A. meredam gangguan B. pengamanan sistem proses C. mempercepat tanggapan sistem D. mencegah fluktuasi besar variabel proses
2. Syarat penerapan pengendali kaskade sebagai berikut, kecuali …
A. Variabel proses terukur B. Gangguan terukur C. Loop dalam lebih cepat D. Perlu dua pengendali
3. Pengendali proporsional biasa dipakai pada inner loop pada pengendali kaskade. Sebab
A. lebih cepat dibanding PI B. tidak perlu akurat C. lebih stabil dibanding PI D. Jawab A, B, dan C
4. Pengendali cascade memperbesar frekuensi alami sistem pengendalian, karena konstanta waktunya … A. mengecil B. membesar C. tak berubah D. berubah-ubah
5. Dalam sistem pengendalian cascade, loop dalam (sekunder) dapat berupa ..
A. valve actuator B. control valve dengan positioner C. control valve tanpa actuator D. sistem pengendalian yang lambat
Pengendalian Proses 139
6. Jika konstanta waktu loop dalam lebih besar dibanding loop luar, maka dengan sistem pengendalian cascade A. memperkecil periode osilasi B. memperbesar periode osilasi C. memperbaiki operasi sistem D. tidak menguntungkan
7. Penalaan sistem pengendalian cascade dimulai dengan … A. pengendali luar pada manual dan pengendali dalam ditala. B. pengendali dalam pada manual dan pengendali luar ditala. C. pengendali luar dan dalam ditala bersama. D. pengendali luar dan dalam bebas ditala tanpa urutan tertentu.
8. Antisipasi gangguan pada proses tanpa mengukur PV dilakukan dengan pengendali
A. Cascade B. split range C. umpan maju D. override
9. Dari hal-hal berikut yang bukan tujuan pengendalian umpan maju adalah …
A. mencegah terjadinya offset B. meredam gangguan C. pengamanan sistem proses D. kestabilan tinggi
10. Keuntungan memakai pengendali umpan maju adalah ….
A. Akurat B. Stabil C. Tidak ada offset D. Semua gangguan dapat diantisipasi
11. Sistem pengendalian umpan maju
A. diterapkan pada semua proses B. diterapkan jika teknologi memungkinkan C. menguntungkan dari sisi ekonomi D. diterapkan jika menguntungkan dari segi ekonomi dan teknologi
12. Perhatikan hal-hal berikut: (1) Gangguan terukur (2) Model proses (3) Elemen lead-lag (4) Satu sensor/transmiter
Syarat penerapan pengendali umpan maju paling tidak terdiri atas A. 1 B. 1 dan 2 C. 1, 2 dan 3 D. 1, 2, 3 dan 4
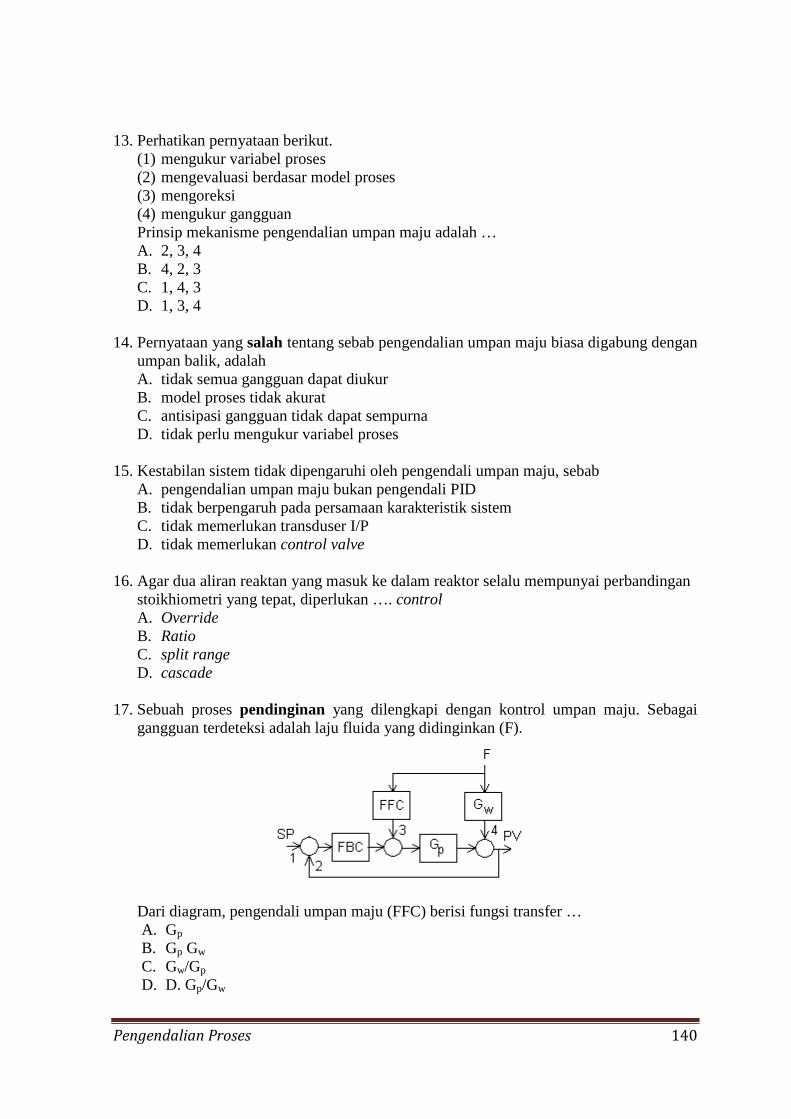
Pengendalian Proses 140
13. Perhatikan pernyataan berikut. (1) mengukur variabel proses (2) mengevaluasi berdasar model proses (3) mengoreksi (4) mengukur gangguan Prinsip mekanisme pengendalian umpan maju adalah … A. 2, 3, 4 B. 4, 2, 3 C. 1, 4, 3 D. 1, 3, 4
14. Pernyataan yang salah tentang sebab pengendalian umpan maju biasa digabung dengan
umpan balik, adalah A. tidak semua gangguan dapat diukur B. model proses tidak akurat C. antisipasi gangguan tidak dapat sempurna D. tidak perlu mengukur variabel proses
15. Kestabilan sistem tidak dipengaruhi oleh pengendali umpan maju, sebab
A. pengendalian umpan maju bukan pengendali PID B. tidak berpengaruh pada persamaan karakteristik sistem C. tidak memerlukan transduser I/P D. tidak memerlukan control valve
16. Agar dua aliran reaktan yang masuk ke dalam reaktor selalu mempunyai perbandingan
stoikhiometri yang tepat, diperlukan …. control A. Override B. Ratio C. split range D. cascade
17. Sebuah proses pendinginan yang dilengkapi dengan kontrol umpan maju. Sebagai
gangguan terdeteksi adalah laju fluida yang didinginkan (F). Dari diagram, pengendali umpan maju (FFC) berisi fungsi transfer … A. Gp B. Gp Gw C. Gw/Gp D. D. Gp/Gw
Pengendalian Proses 141
18. Pengendali rasio … A. Dapat digunakan untuk sembarang kombinasi PV B. memiliki satu masukan pengukuran dan dua keluaran C. hanya untuk rasio bilangan genap D. harus memakai pengendali PI
19. Ratio control termasuk …
A. tipe khusus feedforward control B. override control C. cascade control D. split range control
20. Pengendali split range memiliki jumlah PV … A. satu B. dua C. tiga D. empat
21. Pengendali override (selektor) dipakai jika
A. proses memiliki lebih banyak PV dan satu MV B. proses memiliki lebih banyak MV dan satu PV C. dua atau lebih PV harus diisolasi D. dua atau lebih MV harus diisolasi
22. Pengendali split range yang digunakan untuk mengendalian pemanasan dan pendinginan reaktor eksotermal memiliki jumlah sinyal kendali ke control valve ... A. satu B. dua C. tiga D. empat
23. Sebuah reaktor memerlukan sistem pengamanan terhadap heat spot. Untuk kebutuhan ini diperlukan jenis pengendalian A. Cascade B. Override C. split range D. ratio
Pengendalian Proses 142
BAB-6 ANALISIS SISTEM PENGENDALIAN
TUJUAN PEMBELAJARAN UMUM Memahami analisis sistem pengendalian proses dengan memakai transformasi Laplace dan program paket MATLABTM. TUJUAN PEMBELAJARAN KHUSUS Setelah menyelesaikan bab ini, mahasiswa diharapkan dapat: 1) Mengubah fungsi waktu menjadi fungsi Laplace. 2) Melakukan fraksi parsial fungsi (s). 3) Mengubah fungsi Laplace menjadi fungsi waktu. 4) Menentukan fungsi transfer dari persamaan diferensial sistem. 5) Menggambarkan respon dinamik dari suatu fungsi transfer. 6) Menentukan fungsi transfer lingkar tertutup. 7) Menentukan perilaku dinamik sistem lingkar tertutup 8) Menentukan kestabilan sistem pengendalian dengan metode Routh 9) Menentukan batas kestabilan parameter pengendali dengan metode Routh.
Pengendalian Proses 143
6.1 TINJUAN SINGKAT TRANSFORMASI LAPLACE
Analisis dan sintesis sistem pengendalian dengan menggunakan transformasi Laplace adalah hal yang umum dilakukan para ahli khususnya jalur akademik. Dengan perangkat transformasi Laplace, penyelesaian persamaan diferensial dan integral menjadi lebih sederhana. Ini sangat membantu memahami hubungan antara masukan dan keluaran sistem. Sayangnya transformasi Laplace hanya dapat diterapkan pada sistem linier yang tak berubah (time invariant) dan kurang populer di kalangan praktisi industri. Selain terasa abstrak, transformasi Laplace terasa sangat teoritis. Pemakaian transformasi Laplace pada buku ini semata-mata ditujukan untuk menambah wawasan, yang sangat boleh jadi, bermanfaat di kelak kemudian hari. Untuk menghindari pembahasan yang cenderung teoritis dan membosankan, sengaja penyelesaian analisis dan sintesis memakai bantuan program paket MATLAB TM.
6.1.1 DEFINISI Transformasi Laplace adalah pengubahan bentuk fungsi waktu, f(t), menjadi bentuk dalam ranah frekuensi (frequuency domain), F(s), yang memenuhi hubungan,
∫∞
−=o
stdtetfsF )()( (6.1)
atau dapat dituliskan, F(s) = L{ f(t)} (6.2)
dengan L adalah operator Laplace. Transformasi Laplace hanya berlaku untuk waktu lebih besar atau sama dengan nol dan f(t) kontinyu dalam rentang tersebut. Transformasi Laplace pada dasarnya merupakan perangkat (tools) untuk menyelesaikan persamaan diferensial dan integral. Bentuk persamaan diferensial atau integral lebih dulu diubah ke dalam bentuk Laplace, F(s), untuk diselesaikan secara aljabar biasa. Hasilnya kemudian diubah kembali ke bentuk f(t) yang merupakan penyelesaian persamaan semula melalui inversi Laplace. 6.1.2 TRANSFORMASI FUNGSI Transformasi beberapa fungsi penting yang sering dipakai disajikan dalam tabel 6.1 a) Trasformasi Derivatif
Transformasi, )(tfdt
dn
n
, adalah
L
)(tfdt
dn
n
= )0()0(...)0(")0(')0()( 12321 −−−−− ++++++ nnnnnn fsffsfsfssFs (6.3)
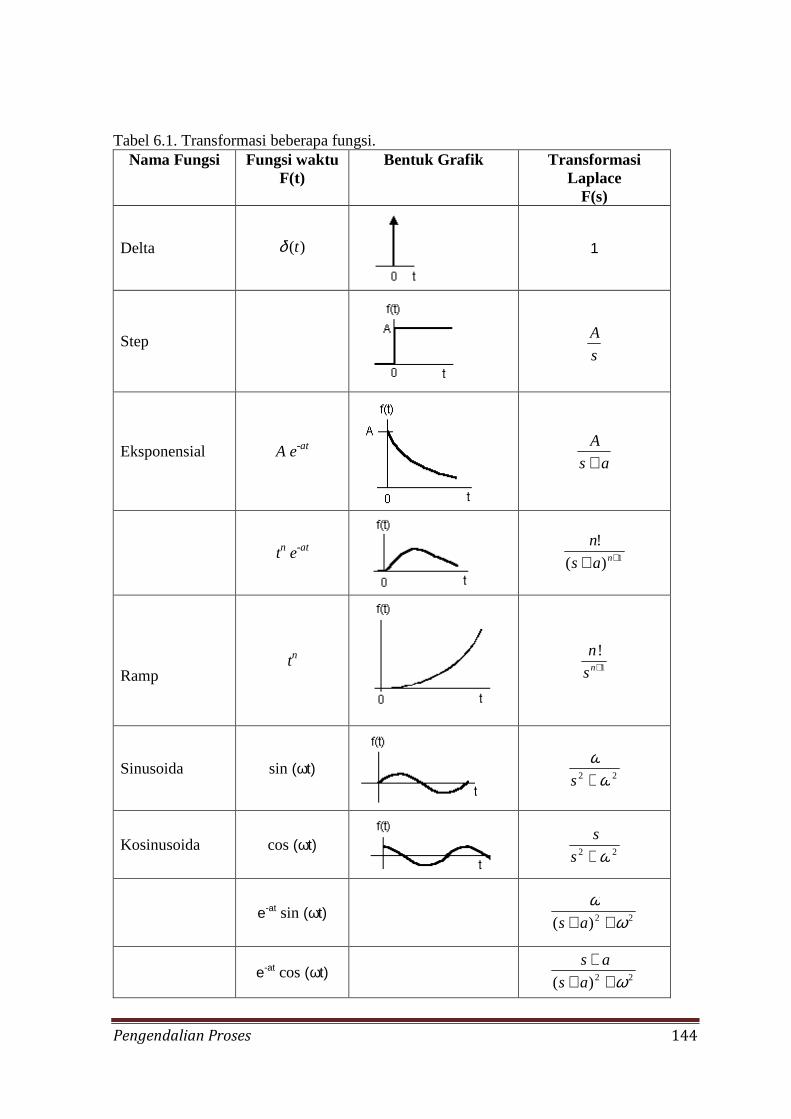
Pengendalian Proses 144
Tabel 6.1. Transformasi beberapa fungsi. Nama Fungsi
Fungsi waktu
F(t) Bentuk Grafik
Transformasi
Laplace F(s)
Delta )(tδ
1
Step
s
A
Eksponensial A e-at
as
A
+
tn e-at
1)(
!++ nas
n
Ramp
tn
1
!+ns
n
Sinusoida sin (ωt)
22 ωω+s
Kosinusoida cos (ωt)
22 ω+s
s
e-at sin (ωt)
22)( ωω
++ as
e-at cos (ωt)
22)( ω+++
as
as

Pengendalian Proses 145
Jika nilai awal f(0) = 0, maka,
L
)(tfdt
dn
n
= sn F(s) (6.4)
Contoh 6.1. Bentuk Laplace dari persamaan diferensial,
xydt
dy
dt
yd342
2
2
=++
dengan, y(0) = 0, adalah, )(142
3)(
2sX
sssY
++=
b) Transformasi Integral
Transformasi dari, ∫∞
o
dttf )( jika nilai awalnya nol, adalah,
L
∫∞
o
dttf )( = s
sF )( (6.5)
Contoh 6.2. Bentuk Laplace dari persamaan integral berikut,
∫∞
=o
dtxy dengan, x(0) = 0, adalah, Y(s) = s
sX )(
c) Teorema Nilai Awal
Nilai awal dari f(t) adalah,
)(lim)(lim0
ssFtfst ∞→→
= (6.6)
d) Teorema Nilai Akhir Nilai akhir dari f(t) adalah,
)(lim)(lim0
ssFtfst →∞→
= (6.7)
e) Teorema Translasi Transformasi Translasi dari fungsi f(t), adalah,
L { } )()( asFtfe at +=− (6.8) f) Teorema Translasi Fungsi Translasi dari fungsi f(t-a) adalah,
L { } )()( sFeatf as−=− (6.9)

Pengendalian Proses 146
6.1.3 INVERSI LAPLACE Inversi Laplace adalah mengembalikan bentuk fungsi F(s) menjadi fungsi waktu, f(t). Penyelesaian inversi relatif lebih sulit dibandingkan dengan tranformasi ke bentuk F(s). Inversi fungsi, F(s), adalah,
L -1{ } )()( tfsF = (6.10)
dengan, L -1 = inversi Laplace.
Contoh 6.3. Akan dicari inversi Laplace dari,
)3)(4(
1)(
+++=
ss
ssF
Untuk menyelesaikan, persamaan tersebut terlebih dahulu diubah ke dalam bentuk,
3
2
4
1
)3)(4(
1)(
+−
+=
+++=
ssss
ssF
Dengan mengacu pada persamaan (6.5) diperoleh, tt eetf 34 2)( −− −=
6.2 FUNGSI TRANSFER Fungsi transfer sistem linier tak berubah waktu adalah perbandingan antara bentuk Laplace variabel keluaran dan bentuk Laplace variabel masukan, dengan kondisi awal sama dengan nol. Meskipun fungsi transfer hanya dapat digunakan pada sistem linier, tetapi lebih informatif dari pada bentuk persamaan diferensial. Bentuk umum fungsi transfer adalah polinomial dalam variabel Laplace (s),
)(
)()(
sD
sNsG = (6.14)
atau
on
nn
nn
n
om
mm
mm
m
asasasasa
bsbsbsbsbsG
++++++++++= −
−−
−
−−
−−
12
21
1
12
21
1)(K
K (6.15)
dengan nm ≤ . Contoh 6.4. Fungsi Transfer
Sistem proses yang dilengkapi control valve dan transmiter memiliki persamaan sebagai berikut.
• Sistem proses mcdt
dc
dt
cd2129
2
2
=++
• Control valve umdt
dm =+2,0
• Transmiter cydt
dy =+05,0

Pengendalian Proses 147
Transformasi Laplace persamaan diferensial di atas menghasilkan,
• Sistem proses 1129
22 ++
=ss
Gp
• Control valve 12,0
1
+=
sGv
• Transmiter 105,0
1
+=
sGv
Gabungan ketiga fungsi transfer tersebut menghasilkan fungsi transfer keseluruhan antara Y dan U.
tpv GGGU
YG ==
)105,0)(12,0)(1129(
22 ++++
=ssss
G
)125,1201,1237,209,0(
2234 ++++
=ssss
G
Fungsi transfer sistem mencerminkan karakteristiknya, baik karakteristik statik
maupun dinamik. Karakteristik statik diperoleh dengan membuat nilai s sama dengan nol. Sedangkan karakteristik dinamik diperoleh dengan mengganti nilai s = jω. Gain dinamik diperoleh dari nilai magnitudonya dan sudut fasenya.
Steady state gain, K = 0
0)()(lim =→
= ss
sGsG (6.11)
Dynamic gain, G = ωjssG
=)( (6.12)
Sudut fase,
= −
Re
Imtan 1φ (6.13)
dengan, Im adalah bagian imajiner, dan Re adalah bagian nyata (real).
6.3 ANALISIS FUNGSI TRANSFER 6.3.1 AKAR-AKAR POLINOMIAL Akar-akar dari sebuah polinomial dapat dihitung dengan memakai perintah roots(p) dengan p adalah vektor baris yang berisi koefisien polinomial. Jika r adalah vektor kolom yang berisi akar-akar polinomial, maka dengan perintah poly(r), akan diperoleh kembali harga koefisien polinomial.
Contoh 6.5. Tentukan akar-akar polinomial
s s s s s5 4 3 23 11 27 10 24+ − − + + Penentuan akar-akar polinomial dapat dilihat pada program berikut.
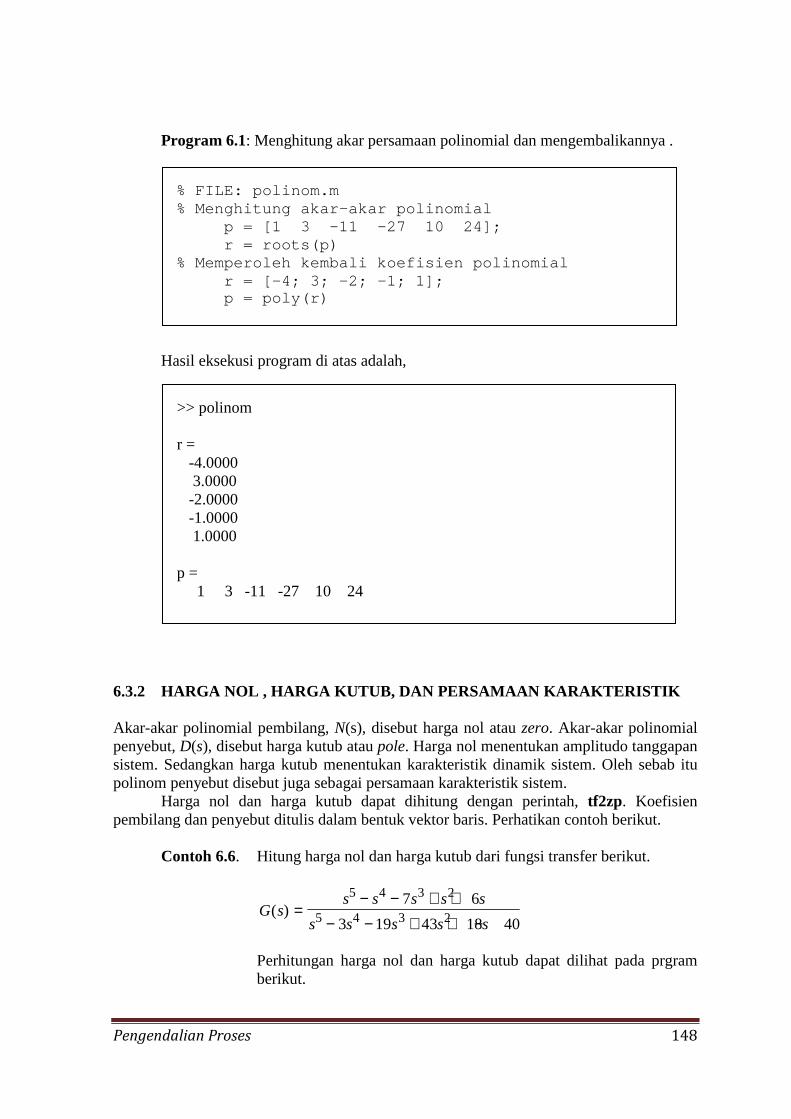
Pengendalian Proses 148
Program 6.1: Menghitung akar persamaan polinomial dan mengembalikannya .
Hasil eksekusi program di atas adalah, 6.3.2 HARGA NOL , HARGA KUTUB, DAN PERSAMAAN KARAKTERISTIK Akar-akar polinomial pembilang, N(s), disebut harga nol atau zero. Akar-akar polinomial penyebut, D(s), disebut harga kutub atau pole. Harga nol menentukan amplitudo tanggapan sistem. Sedangkan harga kutub menentukan karakteristik dinamik sistem. Oleh sebab itu polinom penyebut disebut juga sebagai persamaan karakteristik sistem. Harga nol dan harga kutub dapat dihitung dengan perintah, tf2zp. Koefisien pembilang dan penyebut ditulis dalam bentuk vektor baris. Perhatikan contoh berikut.
Contoh 6.6. Hitung harga nol dan harga kutub dari fungsi transfer berikut.
G ss s s s s
s s s s s( ) =
− − + +− − + + −
5 4 3 2
5 4 3 27 6
3 19 43 18 40
Perhitungan harga nol dan harga kutub dapat dilihat pada prgram berikut.
>> polinom r = -4.0000 3.0000 -2.0000 -1.0000 1.0000 p = 1 3 -11 -27 10 24
% FILE: polinom.m % Menghitung akar-akar polinomial p = [1 3 -11 -27 10 24]; r = roots(p) % Memperoleh kembali koefisien polinomial r = [-4; 3; -2; -1; 1]; p = poly(r)
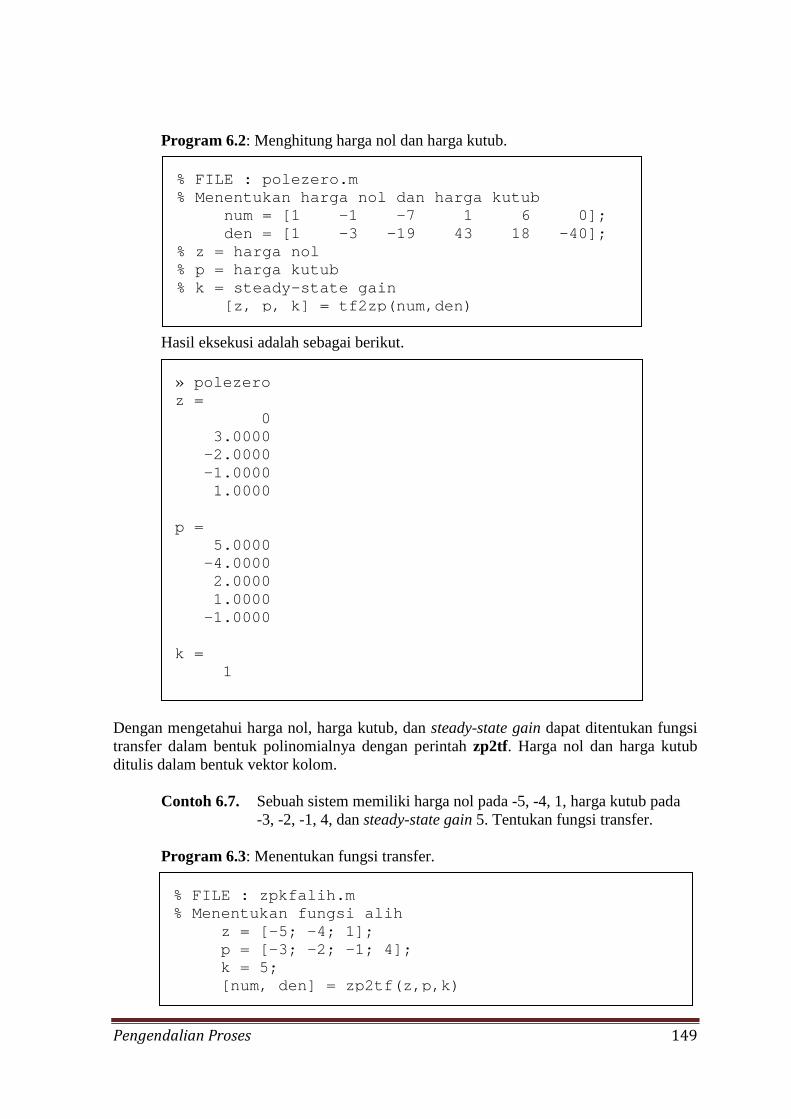
Pengendalian Proses 149
Program 6.2: Menghitung harga nol dan harga kutub.
Hasil eksekusi adalah sebagai berikut. Dengan mengetahui harga nol, harga kutub, dan steady-state gain dapat ditentukan fungsi transfer dalam bentuk polinomialnya dengan perintah zp2tf. Harga nol dan harga kutub ditulis dalam bentuk vektor kolom.
Contoh 6.7. Sebuah sistem memiliki harga nol pada -5, -4, 1, harga kutub pada -3, -2, -1, 4, dan steady-state gain 5. Tentukan fungsi transfer.
Program 6.3: Menentukan fungsi transfer.
» polezero z = 0 3.0000 -2.0000 -1.0000 1.0000 p = 5.0000 -4.0000 2.0000 1.0000 -1.0000 k = 1
% FILE : zpkfalih.m % Menentukan fungsi alih
z = [-5; -4; 1]; p = [-3; -2; -1; 4]; k = 5; [num, den] = zp2tf(z,p,k)
% FILE : polezero.m % Menentukan harga nol dan harga kutub num = [1 -1 -7 1 6 0]; den = [1 -3 -19 43 18 -40]; % z = harga nol % p = harga kutub % k = steady-state gain [z, p, k] = tf2zp(num,den)
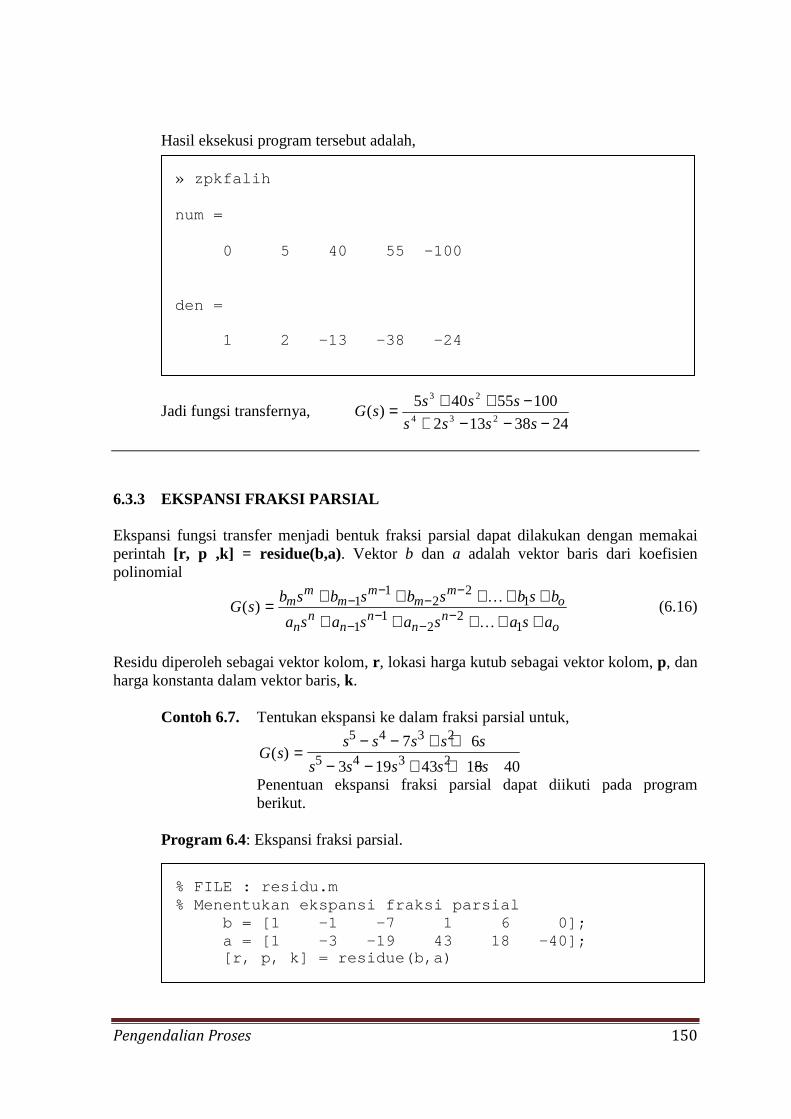
Pengendalian Proses 150
Hasil eksekusi program tersebut adalah,
Jadi fungsi transfernya, 2438132
10055405)(
234
23
−−−+−++=ssss
ssssG
6.3.3 EKSPANSI FRAKSI PARSIAL Ekspansi fungsi transfer menjadi bentuk fraksi parsial dapat dilakukan dengan memakai perintah [r, p ,k] = residue(b,a). Vektor b dan a adalah vektor baris dari koefisien polinomial
on
nn
nn
n
om
mm
mm
m
asasasasa
bsbsbsbsbsG
++++++++++= −
−−
−
−−
−−
12
21
1
12
21
1)(K
K (6.16)
Residu diperoleh sebagai vektor kolom, r, lokasi harga kutub sebagai vektor kolom, p, dan harga konstanta dalam vektor baris, k.
Contoh 6.7. Tentukan ekspansi ke dalam fraksi parsial untuk,
G ss s s s s
s s s s s( ) =
− − + +− − + + −
5 4 3 2
5 4 3 27 6
3 19 43 18 40
Penentuan ekspansi fraksi parsial dapat diikuti pada program berikut.
Program 6.4: Ekspansi fraksi parsial.
» zpkfalih num = 0 5 40 55 -100 den = 1 2 -13 -38 -24
% FILE : residu.m % Menentukan ekspansi fraksi parsial b = [1 -1 -7 1 6 0]; a = [1 -3 -19 43 18 -40]; [r, p, k] = residue(b,a)
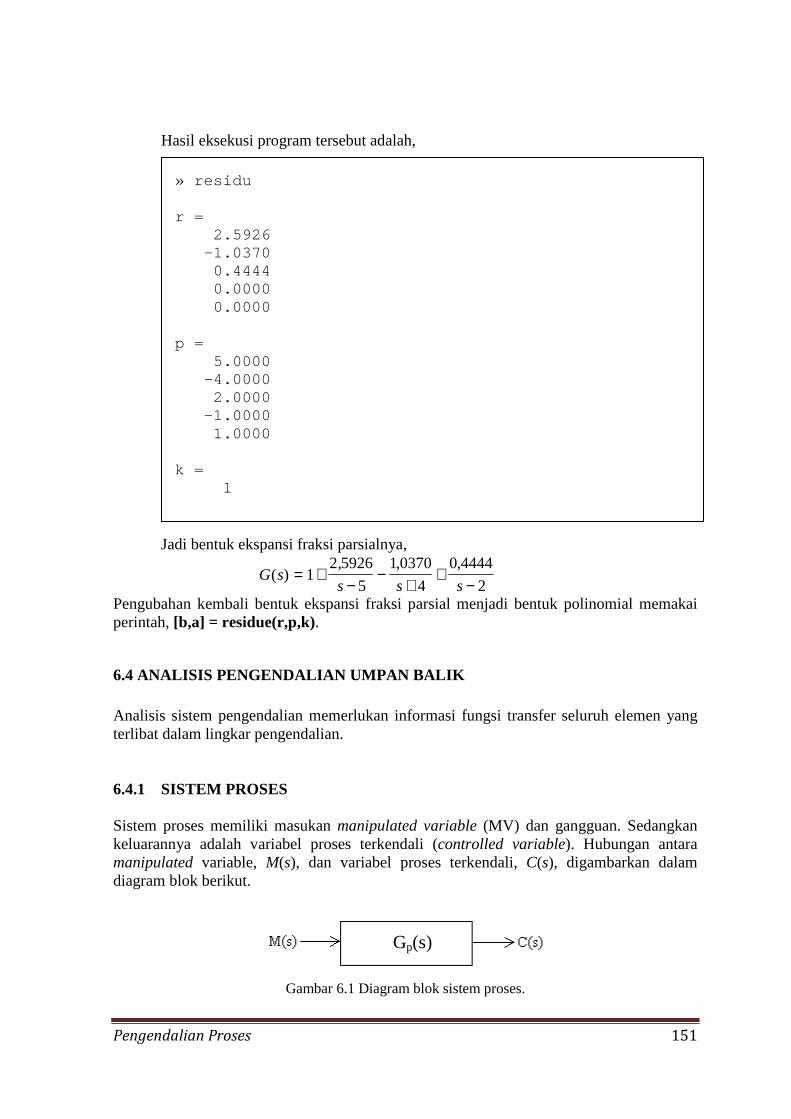
Pengendalian Proses 151
Hasil eksekusi program tersebut adalah,
Jadi bentuk ekspansi fraksi parsialnya,
G ss s s
( ), , ,
= +−
−+
+−
12 5926
5
1 0370
4
0 4444
2
Pengubahan kembali bentuk ekspansi fraksi parsial menjadi bentuk polinomial memakai perintah, [b,a] = residue(r,p,k).
6.4 ANALISIS PENGENDALIAN UMPAN BALIK Analisis sistem pengendalian memerlukan informasi fungsi transfer seluruh elemen yang terlibat dalam lingkar pengendalian. 6.4.1 SISTEM PROSES Sistem proses memiliki masukan manipulated variable (MV) dan gangguan. Sedangkan keluarannya adalah variabel proses terkendali (controlled variable). Hubungan antara manipulated variable, M(s), dan variabel proses terkendali, C(s), digambarkan dalam diagram blok berikut.
Gambar 6.1 Diagram blok sistem proses.
» residu r = 2.5926 -1.0370 0.4444 0.0000 0.0000 p = 5.0000 -4.0000 2.0000 -1.0000 1.0000 k = 1
Gp(s)
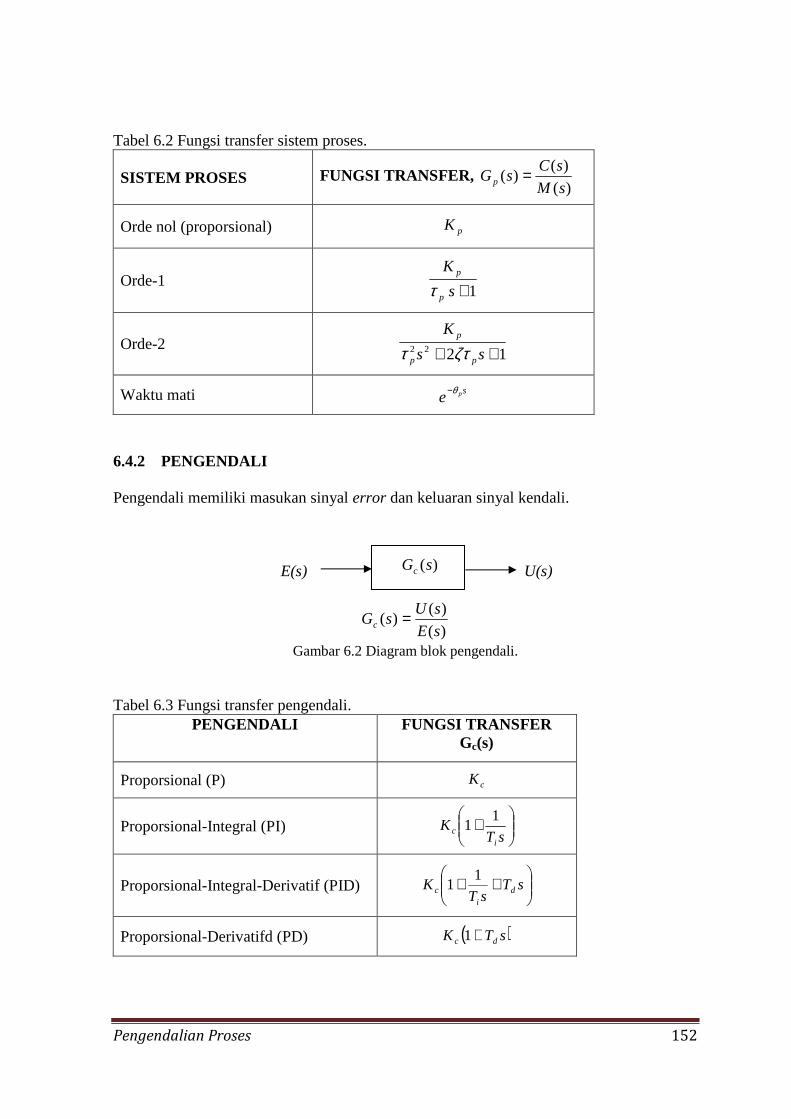
Pengendalian Proses 152
Tabel 6.2 Fungsi transfer sistem proses.
SISTEM PROSES FUNGSI TRANSFER, )(
)()(
sM
sCsGp =
Orde nol (proporsional) pK
Orde-1 1+s
K
p
p
τ
Orde-2 1222 ++ ss
K
pp
p
ζττ
Waktu mati spe θ−
6.4.2 PENGENDALI Pengendali memiliki masukan sinyal error dan keluaran sinyal kendali. E(s) U(s)
)(
)()(
sE
sUsGc =
Gambar 6.2 Diagram blok pengendali. Tabel 6.3 Fungsi transfer pengendali.
PENGENDALI FUNGSI TRANSFER Gc(s)
Proporsional (P) cK
Proporsional-Integral (PI)
+
sTK
ic
11
Proporsional-Integral-Derivatif (PID)
++ sT
sTK d
ic
11
Proporsional-Derivatifd (PD) ( )sTK dc +1
)(sGc
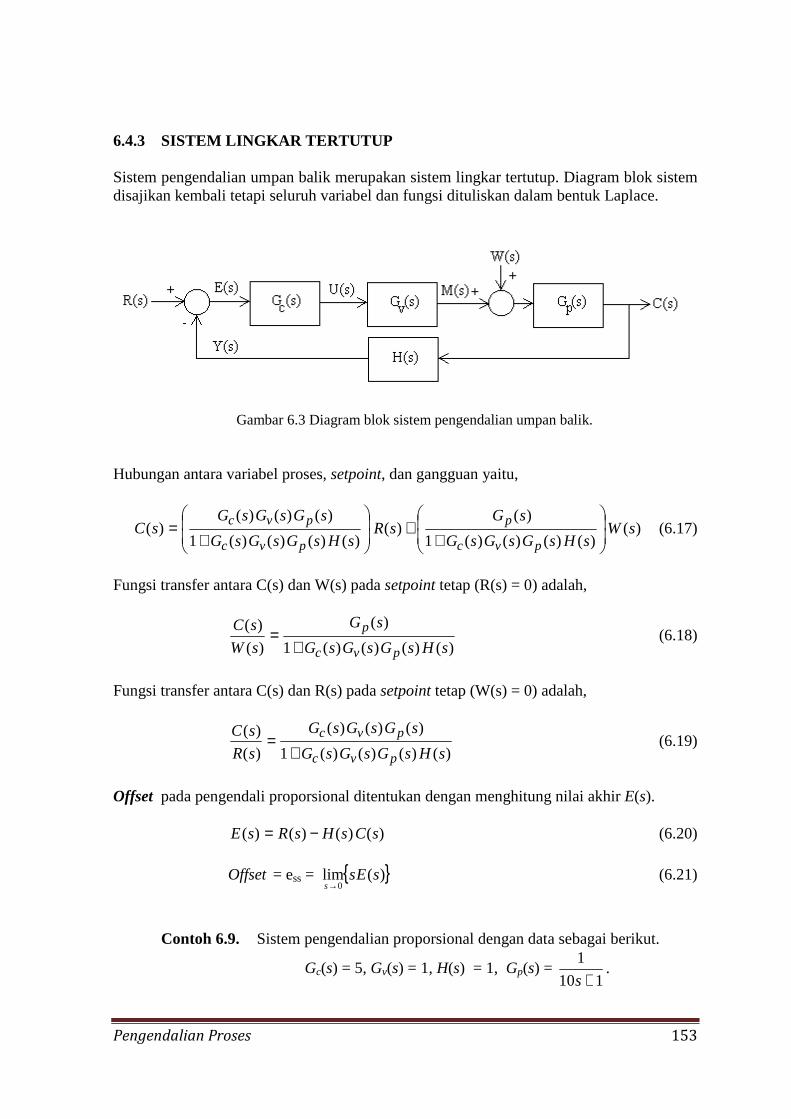
Pengendalian Proses 153
6.4.3 SISTEM LINGKAR TERTUTUP Sistem pengendalian umpan balik merupakan sistem lingkar tertutup. Diagram blok sistem disajikan kembali tetapi seluruh variabel dan fungsi dituliskan dalam bentuk Laplace.
Gambar 6.3 Diagram blok sistem pengendalian umpan balik. Hubungan antara variabel proses, setpoint, dan gangguan yaitu,
)()()()()(1
)()(
)()()()(1
)()()()( sW
sHsGsGsG
sGsR
sHsGsGsG
sGsGsGsC
pvc
p
pvc
pvc
++
+= (6.17)
Fungsi transfer antara C(s) dan W(s) pada setpoint tetap (R(s) = 0) adalah,
)()()()(1
)(
)(
)(
sHsGsGsG
sG
sW
sC
pvc
p
+= (6.18)
Fungsi transfer antara C(s) dan R(s) pada setpoint tetap (W(s) = 0) adalah,
)()()()(1
)()()(
)(
)(
sHsGsGsG
sGsGsG
sR
sC
pvc
pvc
+= (6.19)
Offset pada pengendali proporsional ditentukan dengan menghitung nilai akhir E(s).
E s R s H s C s( ) ( ) ( ) ( )= − (6.20)
Offset = ess = { })(lim0
sEss→
(6.21)
Contoh 6.9. Sistem pengendalian proporsional dengan data sebagai berikut.
Gc(s) = 5, Gv(s) = 1, H(s) = 1, Gp(s) = 110
1
+s.
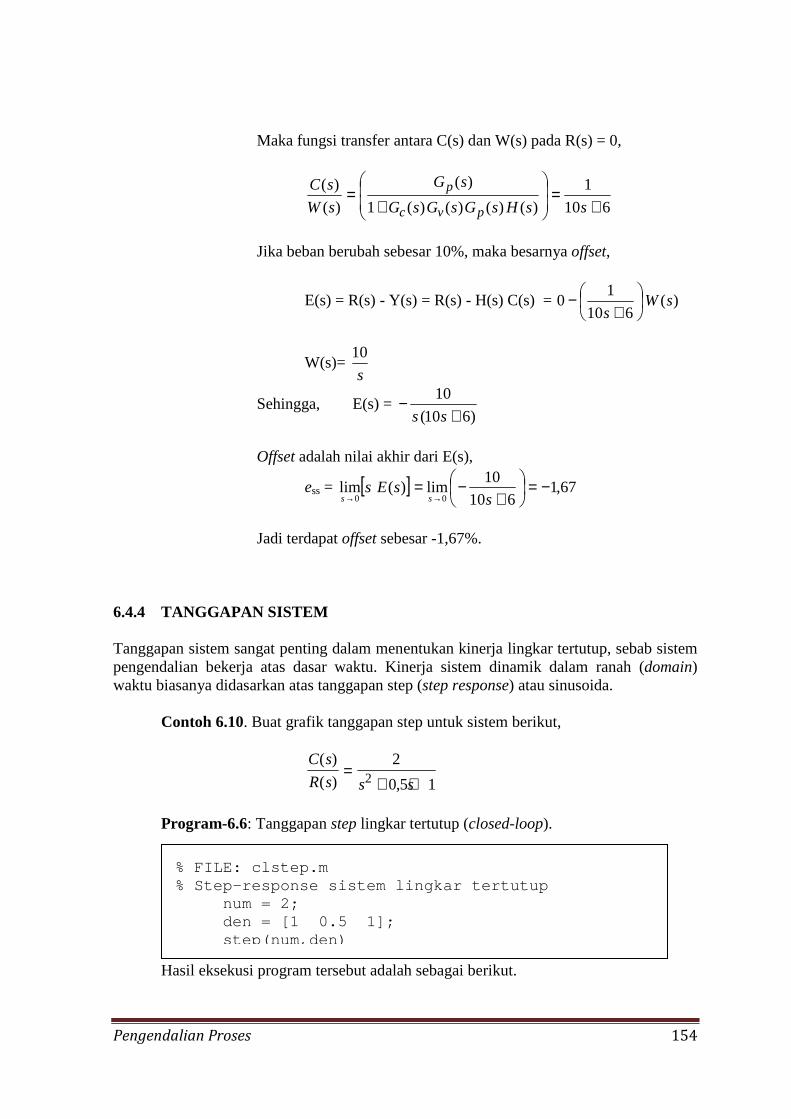
Pengendalian Proses 154
Maka fungsi transfer antara C(s) dan W(s) pada R(s) = 0,
610
1
)()()()(1
)(
)(
)(
+=
+=
ssHsGsGsG
sG
sW
sC
pvc
p
Jika beban berubah sebesar 10%, maka besarnya offset,
E(s) = R(s) - Y(s) = R(s) - H(s) C(s) = )(610
10 sW
s
+−
W(s)= s
10
Sehingga, E(s) = )610(
10
+−
ss
Offset adalah nilai akhir dari E(s),
ess = [ ] 67,1610
10lim)(lim
00−=
+−=
→→ ssEs
ss
Jadi terdapat offset sebesar -1,67%. 6.4.4 TANGGAPAN SISTEM Tanggapan sistem sangat penting dalam menentukan kinerja lingkar tertutup, sebab sistem pengendalian bekerja atas dasar waktu. Kinerja sistem dinamik dalam ranah (domain) waktu biasanya didasarkan atas tanggapan step (step response) atau sinusoida.
Contoh 6.10. Buat grafik tanggapan step untuk sistem berikut,
C s
R s s s
( )
( ) ,=
+ +2
0 5 12
Program-6.6: Tanggapan step lingkar tertutup (closed-loop).
Hasil eksekusi program tersebut adalah sebagai berikut.
% FILE: clstep.m % Step-response sistem lingkar tertutup num = 2; den = [1 0.5 1]; step(num,den)
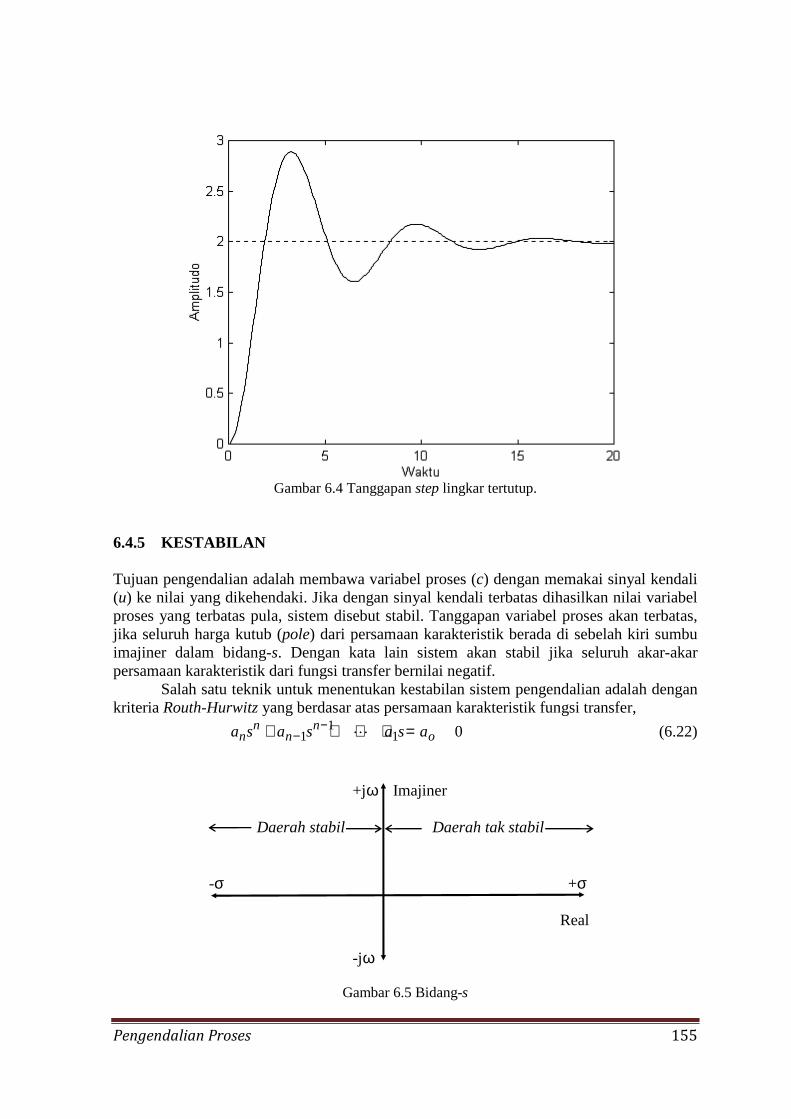
Pengendalian Proses 155
Gambar 6.4 Tanggapan step lingkar tertutup.
6.4.5 KESTABILAN Tujuan pengendalian adalah membawa variabel proses (c) dengan memakai sinyal kendali (u) ke nilai yang dikehendaki. Jika dengan sinyal kendali terbatas dihasilkan nilai variabel proses yang terbatas pula, sistem disebut stabil. Tanggapan variabel proses akan terbatas, jika seluruh harga kutub (pole) dari persamaan karakteristik berada di sebelah kiri sumbu imajiner dalam bidang-s. Dengan kata lain sistem akan stabil jika seluruh akar-akar persamaan karakteristik dari fungsi transfer bernilai negatif. Salah satu teknik untuk menentukan kestabilan sistem pengendalian adalah dengan kriteria Routh-Hurwitz yang berdasar atas persamaan karakteristik fungsi transfer,
a s a s a s ann
nn
o+ + + + =−−
11
1 0L (6.22) +jω Imajiner Daerah stabil Daerah tak stabil -σ +σ Real -jω
Gambar 6.5 Bidang-s

Pengendalian Proses 156
Jika salah satu koefisien polinomial berharga negatif, maka sistem adalah stabil, dan tidak perlu melakukan tes Routh. Tetapi jika seluruh koefisien berharga positif, maka sistem dapat stabil atau tak stabil. Untuk kasus ini, maka dibuat tabel Routh sebagai berikut. Kolom 1 2 3 …
sn an an-2 an-4 …
sn-1 an-1 an-3 an-5 … sn-2 b1 b2 b3 … sn-3
c1 c2 c3 … … … … … …
dengan,
ba a a a
an n n n
n1
1 2 3
1=
−− − −
−, b
a a a a
an n n n
n2
1 4 5
1=
−− − −
−, dst.
cb a a b
bn n
11 3 1 2
1=
−− − , cb a a b
bn n
21 5 1 3
1=
−− − , dst.
Perhitungan tersebut diteruskan sampai diperoleh semua elemen bernilai nol. Teorema Routh (1) Sistem akan stabil jika seluruh elemen dalam kolom pertama berharga positif dan
bukan nol. (2) Jika dalam kolom pertama terdapat elemen yang berharga negatif, maka terdapat harga
kutub yang berharga positif dan perubahan tanda dalam kolom. (3) Jika terdapat sepasang akar yang berada pada sumbu imajiner, sedangkan harga kutub
yang lain negatif, maka seluruh elemen pada baris itu dan baris sesudahnya menjadi hilang, dan sistem tak stabil.
Contoh 6.11. Tentukan, apakah sistem yang memiliki persamaan karakteristik
berikut stabil.
s s s s4 3 210 35 50 24 0+ + + + = Tabel Routh yang dihasilkan adalah,
Kolom
1 2 3
1 35 24 10 50 0 30 24 0 42 0 0 24 0 0
Seluruh elemen dalam kolom pertama berharga positif, maka sesuai teorema-1, sistem adalah stabil.

Pengendalian Proses 157
SOAL-SOAL 1. Cari inversi Laplace dari,
F ss
s s s( )
( )( )=
++ +
3
1 2
2. Tentukan akar-akar polinomial
3 2 10 7 45 4 3 2s s s s s+ − − + + = 0
2. Hitung harga nol dan harga kutub dari fungsi transfer berikut.
G ss s s s
s s s s s( ) =
− + ++ − + + −
4 3 2
5 4 3 25 2
9 4 8 4
4. Sebuah sistem memiliki harga nol pada -2, -3, 1, harga kutub pada -1, -3, -4, 2, dan
steady-state gain 2. Tentukan fungsi transfer sistem.
5. Sistem pengendalian proporsional dengan data sebagai berikut.
Gc(s) = 2, Gv(s) = 1, H(s) = 1, Gp(s) =2
5 1s+.
Jika beban berubah sebesar 10%, tentukan besarnya offset proporsional. 6. Buat grafik respon step.
C s
R s s s
( )
( ) ,=
+ +1
0 3 12
7. Apakah sistem yang memiliki persamaan karakteristik berikut stabil?
s s s s4 3 25 3 2 4 0+ + + + =
Pengendalian Proses 158
DAFTAR PUSTAKA
1. Anonim (1994). Kumpulan Materi Kursus Sistem Kontrol. Jurusan Teknik Mesin,
Politeknik ITB, Bandung. 2. Anonim (2001). The ECOSSE Control HyperCourse. Department of Chemical
Engineering, University of Edinburgh, Scotland.
3. Anderson, N.A. (1980). Instrumentation for Process Measurement and Control. Chilton Co., Radnor, Pennsylvania.
4. Bateson, R.N. (1993). Introduction to Control System Technology. Maxwell Macmillan
International, Singapore.
5. Coughanowr, D. R. (1991). Process Systems Analysis and Control. Edisi 2, McGraw-Hill Int. Ed., Singapore.
6. Cooper, D. J. (2004). Practical Process Control. Control Station LLC, Storrs. 7. Gillum, D.R. (1984) Industrial Level Measurement, Instrument Society of America,
Research Triangle Pk, NC, USA. 8. Gillum, D.R. (1982) Industrial Level Measurement, Instrument Society of America,
Research Triangle Pk, NC, USA. 9. Gunterus, F. (1994). Falsafah Dasar Sistem Pengendalian Proses. PT Elex Media
Komputindo, Jakarta. 10. Kadiman, K. (1991). Pengantar Kontrol Proses Berbasis Komputer. Jurusan Teknik
Fisika, ITB, Bandung. 11. Kerlin, T.W. and Shepard, R.L. (eds) (1982) Industrial Temperature Measurement,
Instrument Society of America, Research Triangle Pk, NC, USA. 12. Link, W. (1993). Pengukuran, Pengendalian dan Pengaturan dengan PC. PT
Elexmedia Komputindo, Jakarta. 13. Luyben, W.L. (1990). Process Modeling, Simulations, and Control for Chemical
Engineers. Graw-Hill Pub. Co., Singapore.
Pengendalian Proses 159
14. Marlin, T. E. (2000). Process Control. Edisi 2, McGraw-Hill International Ed.,
Singapore. 15. Moore, A. (1986). “Selecting a flowmeter”. The Chemical Engineer, April, 39-45. 16. Saadat, H. (1993). Computational Aids in Control Systems Using MATLAB. McGraw-
Hill Int. Editions., Singapore.
17. Shinskey, F.G. (1988). Process Control System. Ed. 3, MacGraw-Hill, Int. Ed., Singapore.
18. Smith, C.A. (1985). Principles and Practice of Automatic ProcessControl. John Wiley
and Sons, Singapore. 19. Stephanopoulos, G. (1988). Chemical Process Control. Prentice-Hall Inc., N. J. 20. Wade, H. L. (2004). Basic and Adavanced Regulatory Control: System Design and
Application. Ed. 2, ISA, NC.
Related Documents











