Galih Aldy Pratama, SNTEM, Volume 1, November 2021, hal. 1167-1178 1167 ANALISA KESTABILAN PROSES PENGENDALIAN TEMPERATURE PADA DIRECT CONTACT MENGGUNAKAN METODE NYQUIST DAN ROOT LOCUS Galih Aldy Pratama 1* Teknik Instrumentasi Kilang, Politeknik Energi dan Mineral Akamigas, Jl. Gajah Mada No. 38 Cepu, Kabupaten Blora *E-mail: [email protected] ABSTRAK Direct Contact Heater merupakan salah satu jenis heater yang berfungsi sebagai alat pemanas Raw Sugar yang ada di Raw Sugar Melter. Masukan dari Direct Contact Heater ini berupa 1 st Line Liquor Vapour dengan keluaran berupa Raw Sugar sesuai dengan set point yaitu 80 °C. Untuk bisa mencapai set point, Direct Contact Heater memiliki sistem pengendalian dengan bantuan komponen – komponen sistem pengendalian yang ada. Resistance Thermal Detector (RTD) merupakan sensor suhu yang digunakaan untuk membaca suhu aktual kemudian mengubah besaran derajat menggunakan modul transmitter SITRANS TH2000 menjadi sinyal standar 4 – 20 mA DC. Keluaran modul transmitter SITRANS TH2000 langsung tertampil di control room DCS. Controller memiliki mode kontroler Proportional Integral (PI), mode proportional digunakan sebagai penghilang error dan mode integral berfungsi untuk menghilangkan osilasi yang dihasilkan oleh mode proportional. Control Valve menjadi komponen penggerak untuk mengatur banyaknya aliran 1 st Line Liquor Vapour yang masuk ke Direct Contact Heater. Sistem pengendalian ini dapat dianalisa kestabilannya menggunakan metode Nyquist Stability dan Root Locus Stability untuk mengetahui secara teoritis apakah proses berjalan stabil atau tidak. Kata Kunci: Temperature, Heater, Simulink, Controller, Kestabilan 1. PENDAHULUAN Semakin pesatnya kemajuan teknologi serta pembangunan negara, kebutuhan produk- produk pangan, seperti halnya gula terus bertambah. PT. XXX merupakan anak perusahaan Perum BULOG dengan lingkup kerja di wilayah Blora yang bergerak dalam industri gula kristal putih. Pabrik gula Blora dibangun oleh PT. XXX pada tahun 2010. Pada PT. XXX terdapat beberapa bagian unit pengolahan, salah satunya yaitu unit Proccess. Pada unit Process terdapat banyak alat penunjang produksi gula,salah satunya yaitu Direct Contact Heater. Direct Contact Heater berfungsi sebagai tempat pemanas Raw Sugar. Alat ini memiliki satu masukan yaitu 1 st Line Liquor Vapour dan satu keluaran yaitu Raw Sugar. 1 st Line Liquor Vapour memiliki suhu tinggi, maka dari itu masukan Direct Contact Heater ini perlu dikontrol agar raw sugar yang dipanaskan berjalan dengan normal. Untuk menjaga suhu dari Raw Sugar, maka dibutuhkan suatu kontroler yang mampu mengendalikan proses temperature tersebut. Setiap kontroler memiliki karakteristik tersendiri dalam melakukan pengendalian. Oleh sebab itu, dari karakteristik proses Direct Contact Heater, dapat dilakukan perbandingan dua analisa teoritis terhadap pemodelan data di lapangan. [1] Analisa kestabilan pada suatu proses pengendalian ini penting dilakukan agar suatu perusahaan mengatahui apakah pengendalian pada perusahaannya itu sudah stabil atau belum.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Galih Aldy Pratama, SNTEM, Volume 1, November 2021, hal. 1167-1178
1167
ANALISA KESTABILAN PROSES PENGENDALIAN TEMPERATURE
PADA DIRECT CONTACT MENGGUNAKAN METODE NYQUIST DAN
ROOT LOCUS
Galih Aldy Pratama1*
Teknik Instrumentasi Kilang, Politeknik Energi dan Mineral Akamigas,
Jl. Gajah Mada No. 38 Cepu, Kabupaten Blora
*E-mail: [email protected]
ABSTRAK
Direct Contact Heater merupakan salah satu jenis heater yang berfungsi sebagai alat pemanas
Raw Sugar yang ada di Raw Sugar Melter. Masukan dari Direct Contact Heater ini berupa 1st Line
Liquor Vapour dengan keluaran berupa Raw Sugar sesuai dengan set point yaitu 80 °C. Untuk bisa
mencapai set point, Direct Contact Heater memiliki sistem pengendalian dengan bantuan komponen –
komponen sistem pengendalian yang ada. Resistance Thermal Detector (RTD) merupakan sensor suhu
yang digunakaan untuk membaca suhu aktual kemudian mengubah besaran derajat menggunakan
modul transmitter SITRANS TH2000 menjadi sinyal standar 4 – 20 mA DC. Keluaran modul
transmitter SITRANS TH2000 langsung tertampil di control room DCS. Controller memiliki mode
kontroler Proportional Integral (PI), mode proportional digunakan sebagai penghilang error dan
mode integral berfungsi untuk menghilangkan osilasi yang dihasilkan oleh mode proportional.
Control Valve menjadi komponen penggerak untuk mengatur banyaknya aliran 1st Line Liquor Vapour
yang masuk ke Direct Contact Heater. Sistem pengendalian ini dapat dianalisa kestabilannya
menggunakan metode Nyquist Stability dan Root Locus Stability untuk mengetahui secara teoritis
apakah proses berjalan stabil atau tidak.
Kata Kunci: Temperature, Heater, Simulink, Controller, Kestabilan
1. PENDAHULUAN
Semakin pesatnya kemajuan teknologi serta pembangunan negara, kebutuhan produk-
produk pangan, seperti halnya gula terus bertambah. PT. XXX merupakan anak perusahaan
Perum BULOG dengan lingkup kerja di wilayah Blora yang bergerak dalam industri gula
kristal putih. Pabrik gula Blora dibangun oleh PT. XXX pada tahun 2010. Pada PT. XXX
terdapat beberapa bagian unit pengolahan, salah satunya yaitu unit Proccess. Pada unit
Process terdapat banyak alat penunjang produksi gula,salah satunya yaitu Direct Contact
Heater.
Direct Contact Heater berfungsi sebagai tempat pemanas Raw Sugar. Alat ini memiliki
satu masukan yaitu 1st Line Liquor Vapour dan satu keluaran yaitu Raw Sugar. 1st Line Liquor
Vapour memiliki suhu tinggi, maka dari itu masukan Direct Contact Heater ini perlu
dikontrol agar raw sugar yang dipanaskan berjalan dengan normal.
Untuk menjaga suhu dari Raw Sugar, maka dibutuhkan suatu kontroler yang mampu
mengendalikan proses temperature tersebut. Setiap kontroler memiliki karakteristik tersendiri
dalam melakukan pengendalian. Oleh sebab itu, dari karakteristik proses Direct Contact
Heater, dapat dilakukan perbandingan dua analisa teoritis terhadap pemodelan data di
lapangan.[1]
Analisa kestabilan pada suatu proses pengendalian ini penting dilakukan agar suatu
perusahaan mengatahui apakah pengendalian pada perusahaannya itu sudah stabil atau belum.
Galih Aldy Pratama, SNTEM, Volume 1, November 2021, hal. 1167-1178
1168
Analisa kestabilan ini dapat dilakukan dengan cara melihat grafik proses pada Control Room
atau hanya dengan melihat output an dari proses tersebut. Untuk mengetahui lebih pasti secara
teoritis, maka diperlukan analisa kestabilan melalui beberapa metode seperti Nyiquist dan
Root Locus. [2]
2. METODE
A. Fungsi Alih Elemen Kontrol
Modul SITRANS TH2000 sebagai temperature transmitter digunakan untuk mengukur
temperature fluida pada bagian pipa antara Direct Contact Heater dan Raw Sugar Melter.
Gain transmitter dapat dinyatakan melalui persamaan (1): [1]
GT = 𝑆𝑝𝑎𝑛 𝑜𝑢𝑡𝑝𝑢𝑡
𝑆𝑝𝑎𝑛 𝑖𝑛𝑝𝑢𝑡 (1)
Gain controller dapat dinyatakan melalui persamaan (2) : [1]
GC(s) = Kp [ 1 + 1
𝑇𝑖 𝑆 + Td S ] (2)
Dimana :
Kp = Controller Gain
TI = Integral Time
Td = Derivative Time
Control valve merupakan elemen pengendali akhir yang merupakan bagian akhir
sistem pengendali yang berfungsi mengubah variabel yang dimanipulasi sehingga diperoleh
kondisi yang dikehendaki. Fungsi alih Control valve dapat dinyatakan melalui persamaan (3) :
Gcv(s) = Gip (s) x Gactuator(s) x Gbodyvalve(s)
𝐺𝑖𝑝(𝑠) = 𝑠𝑖𝑛𝑦𝑎𝑙 𝑘𝑒𝑙𝑢𝑎𝑟𝑎𝑛 𝐼/𝑃 𝐶𝑜𝑛𝑣𝑒𝑟𝑡𝑒𝑟
𝑠𝑖𝑛𝑦𝑎𝑙 𝑚𝑎𝑠𝑢𝑘𝑎𝑛 𝐼/𝑃 𝐶𝑜𝑛𝑣𝑒𝑟𝑡𝑒𝑟
Gactuator(s) = 𝑝𝑒𝑟𝑔𝑒𝑠𝑒𝑟𝑎𝑛 𝑠𝑡𝑟𝑜𝑘𝑒 (𝑐𝑚)
𝑠𝑖𝑛𝑦𝑎𝑙 𝑚𝑎𝑠𝑢𝑘𝑘𝑎𝑛 𝑎𝑐𝑡𝑢𝑎𝑡𝑜𝑟(𝑝𝑠𝑖)
𝐺𝑏𝑜𝑑𝑦𝑣𝑎𝑙𝑣𝑒(𝑠) = 1
𝜏𝑠+1 (3)
B. Kontrol Proportional Derivative
Mode kontrol yang menghasilkan perubahan output sebanding dengan waktu dimana
controller tidak merespon error terhadap redaman tetapi berfungsi untuk mempercepat respon
controller, hal tersebut biasa digunakan pada sistem pengendalian temperature. Sehingga
dapat ditulis dalam bentuk matematis sebagai berikut: [1]
Mv(t) = Kp [𝑒(𝑡) + 1
𝑇𝑖 ∫ 𝑒(𝑡) 𝑑𝑡]
𝑡
0+ 𝐵 (4)
Dimana :
Mv = controller output
Kp = kontrol proportional
e (t) = error (perbedaan antara PV dan SV)
Td = konstanta derivative (minutes)
B = Bias
Galih Aldy Pratama, SNTEM, Volume 1, November 2021, hal. 1167-1178
1169
C. Analisa Kestabilan Proses
a. Metode Nyquist
Stabilitas frekuensi domain dikembangkan oleh H.Nyquist pada tahun 1932 berdasarkan
teori Chaucy’s. Nyquist Stability menjelaskan konsep stabilitas dari sistem open loop maupun
close loop yang berasal dari respon frekuensi pole dan zero.[2]
Kriteria stabilitas Nyquist berhubungan dengan respon frekuensi open loop G (jω) H (jω)
terhadap jumlah pole dan zero dari 1+G(s) H(s) dimana titik (-1+j0) harus terletak diluar
daerah garis stable. Sedangkan kondisi tidak stabil ditunjukan apabila titik (-1+j0) berada di
dalam garis unstable. Pole dari 1+G(s) H(s) yang terletak di sebelah kanan sumbu imajiner
bidang s dapat ditentukan secara mudah menggunakan kriteria Routh Hurwitz persamaan G(s)
H(s). [2]
Dalam kriteria Nyquist Stability ada beberapa syarat yang perlu diperhatikan: [2]
1. Tidak ada pengelilingan titik -1+j0. Artinya sistem stabil jika tidak ada pole dari G(s)H(s)
yang terletak di sebelah kanan sumbu imajiner bidang s. jika tidak demikian sistem dikatakan
tidak stabil.
2. Ada satu atau lebih pengelilingan titik -1+j0 berlawanan jarum jam. Dalam hal ini sistem
stabil jika banyaknya pengelilingan berlawanan arah jarum jamm(counterclockwise)
berjumlah sama dengan pole dari G(s)H(s) di sebelah kanan sumbu imajiner bidang s, jika
tidak demikian maka sistem tidak stabil.
3. Ada satu atau lebih pengelilingan titik -1+j0 yang searah jarum jam (clockwise). Dalam
hal ini sistem tidak stabil.
Analisa stabilitas oleh Nyquist sangat membantu dalam kontrol engineering karena
stabilitas mutlak dari sistem close loop dapat dijelaskan berdasarkan grafik dari kurva respon
frekuensi open loop tanpa memerlukan penjelasan aktual letak pole sistem close loop.[2]
b. Metode Root Locus
Metode kestabilan root locus ini memiliki kriteria, yaitu sistem dapat dikatakan stabil
apabila letak pole dari sistem close loop berada di sebelah kiri bidang s. Dan sebaliknya,
sistem dikatakan tidak stabil apabila terdapat pole dari akar persamaan yang berada di sebelah
kanan atau mempunyai lebih dari satu pole pada sumbu imajiner bidang s. Selain itu sistem
dikatakan marginally stable apabila mempunyai satu pole pada sumbu imajiner dan satu atau
lebih pole di sebelah kiri bidang s. [2]
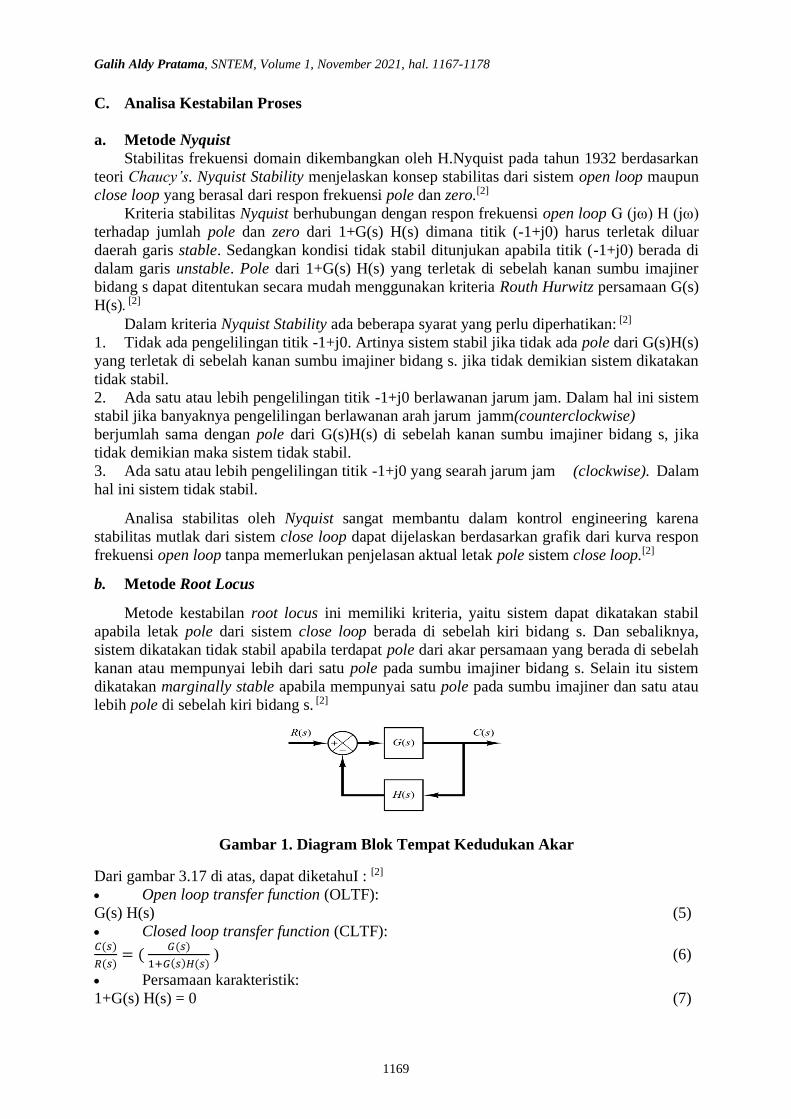
Gambar 1. Diagram Blok Tempat Kedudukan Akar
Dari gambar 3.17 di atas, dapat diketahuI : [2]
• Open loop transfer function (OLTF):
G(s) H(s) (5)
• Closed loop transfer function (CLTF): 𝐶(𝑠)
𝑅(𝑠)= (
𝐺(𝑠)
1+𝐺(𝑠)𝐻(𝑠) ) (6)
• Persamaan karakteristik:
1+G(s) H(s) = 0 (7)

Galih Aldy Pratama, SNTEM, Volume 1, November 2021, hal. 1167-1178
1170
Apabila,
1+G(s) H(s) = 1+( (𝑠+𝑧1)(𝑠+𝑧2)…(𝑠+𝑧𝑛)
(𝑠+𝑝1)(𝑠+𝑝2)…(𝑠+𝑝𝑛)) (8)
Di dalam metode Root Locus, terdapat analisis sistem kendali fasa non-minimum. Suatu
sistem kendali dapat dikatakan sebagai sistem fasa non-minimum apabila sedikitnya terdapat
satu pole atau zero dari sistem open loop yang terletak di sebelah kanan sumbu imajiner.
Kebalikkan dari sistem fasa non-minimum ini adalah sistem fasa minimum. Artinya suatu
sistem dapat dikatakan sebagai fase minimum apabila semua pole dan zero dari sistem open
loop terletak di sebelah kiri sumbu imajiner. [2]
Gambar 2. Root Locus Plot Sistem Fase Non-Minimum
Dari Gambar 2 dapat diketahui bahwa sistem dapat dikatakan stabil apabila gain K < 1
𝑇𝛼. [2]
3. PEMBAHASAN
A. Direct Contact Heater
Direct Contact Heater merupakan alat penukar panas yang ada di bagian pengolahan
pada unit Affination And Remelt. Fungsi dari Heater ini yaitu sebagai alat pemanas Raw Sugar
yang berada di dalam Raw Sugar Melter agar Raw Sugar agar suhu Raw Sugar tetap terjaga
sesuai set point. Direct Contact Heater ini mempunyai inlet yang berasal dari 1st Fine Liquid
Vapour yang mempunyai sifat panas. Heater ini akan memanaskan Raw Sugar agar mencapai
set point yaitu 80 ºC. Raw Sugar yang ada di Raw Sugar Melter ini akan terus memompa Raw
Sugar ke Direct Contact Heater agar suhu tetap stabil (80 ºC) yang kemudian dialirkan ke
Raw Sugar Remelter untuk proses pemurnian. Alasan mengapa set point 80 ºC :
• Untuk mematikan perkembangan mikrobiologi / mikroorganisme
• Temperatur 80 ºC merupakan suhu dimana kerusakan raw sugar minimum.[3]
Gambar 3. Direct Contact Heater
Galih Aldy Pratama, SNTEM, Volume 1, November 2021, hal. 1167-1178
1171
Spesifikasi Direct Contact Heater
Service : raw sugar
Diameter dan tinggi : 1.800 mm dan 3.000 mm
Jenis : vertical cylindrical/internal partilion
Pabrikasi : SU-ENCO
Terdapat control temperature untuk menjaga output temperature pada Direct Contact
Heater agar tetap pada set point yang diinginkan. Control temperature ini diaplikasikan pada
Direct Contact Heater dimaksudkan untuk menunjang keamanan dan ketahanan dari alat
tersebut dan menjaga agar proses berjalan normal sesuai set point yang diinginkan. Controller
ini diatur melalui controller yang dikendalikan melalui control room menggunakan PLC.
B. Fungsi Alih Komponen Level Control Centrifugal Preparation Tank
Respon dari sistem pengendalian Temperature Direct Contact Heater dapat
disimulasikan melalui MatLab Software. Tetapi, sebelumnya diperlukan suatu pendekatan
matematis dengan memodelkan suatu sistem ke dalam perhitungan fungsi alih. Elemen –
elemen yang harus dihitung fungsi alihnya dapat dilihat pada Gambar. Pendekatan untuk
fungsi alih proses dapat dilakukan melalui uji bump test.
Spesifikasi temperature transmitter
Manufactured : Siemens
Model No : SITRANS TH200 Serial No : YSN/C6000605
Supply : 3w
Range : 0 – 150 º C
Output : 4 – 20 mA
Fungsi alih dari temperature transmitter (𝐺𝑡) adalah:
Pada percobaan kali ini, fungsi alih SITRANS TH2000 dianggap ideal yaitu diasumsikan
menjadi 1 :
𝐺𝑡 = 1
Spesifikasi temperature indicator controler
Type : PLC Siemens
Control Mode : Proportional + Integral
Action : Reverse
Output : 4-20 mA
Fungsi alih dari temperature indicator controler (𝐺𝑐 ) adalah:
𝐺𝑐 (𝑠) = Kp (1 + 1
𝑇𝑖 𝑠 + 𝑇𝑑𝑠)
𝐺𝑐 (𝑠) = 2 ( 1 + 1
80𝑠 + 0 )
𝐺𝑐 (𝑠) = 2𝑠+0,25
𝑠
Spesifikasi temperature control valve
Pabrikasi : Sirca
Actuator Input : 0.2-1 Kg/cm2
Body Type : Butterfly
Fungsi alih dari control valve (𝐺𝑐𝑣 ) adalah:
𝐺𝑐𝑣(𝑠) = 𝐺𝑠𝑝(𝑠) 𝑥 𝐺𝑎𝑐𝑡𝑢𝑎𝑡𝑜𝑟(𝑠) 𝑥 𝐺𝑏𝑜𝑑𝑦𝑣𝑎𝑙𝑣𝑒(𝑠)
Galih Aldy Pratama, SNTEM, Volume 1, November 2021, hal. 1167-1178
1172
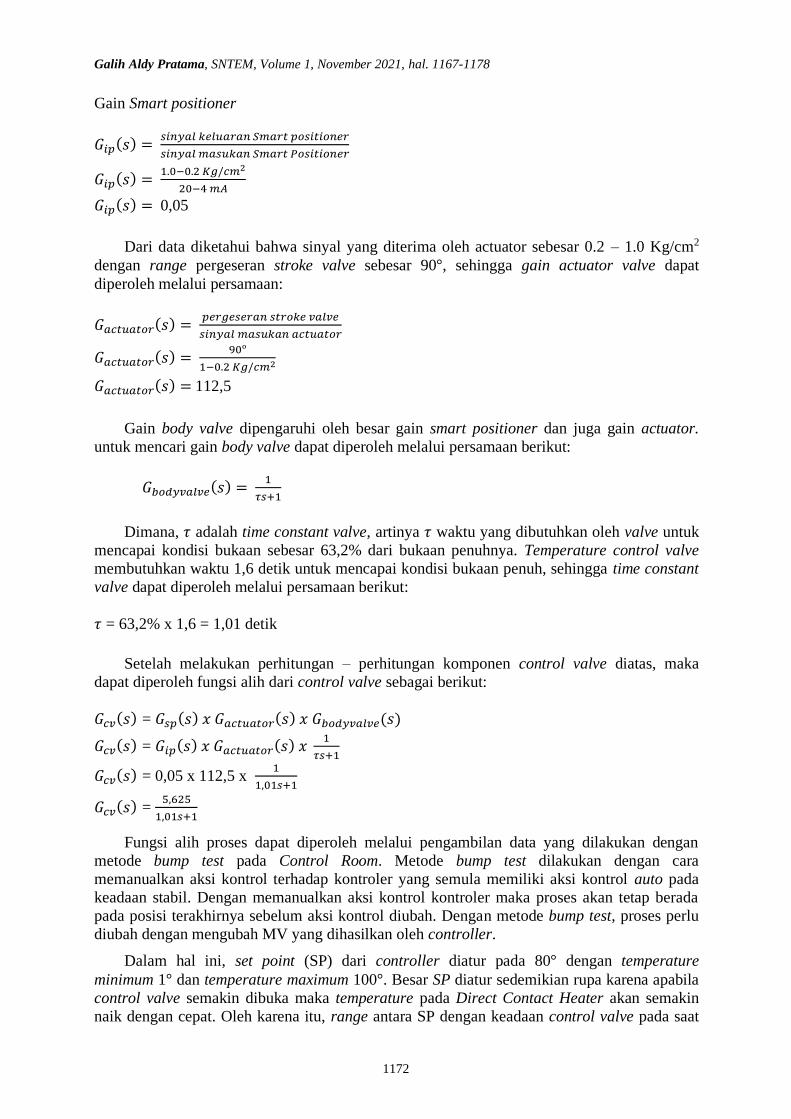
Gain Smart positioner
𝐺𝑖𝑝(𝑠) = 𝑠𝑖𝑛𝑦𝑎𝑙 𝑘𝑒𝑙𝑢𝑎𝑟𝑎𝑛 𝑆𝑚𝑎𝑟𝑡 𝑝𝑜𝑠𝑖𝑡𝑖𝑜𝑛𝑒𝑟
𝑠𝑖𝑛𝑦𝑎𝑙 𝑚𝑎𝑠𝑢𝑘𝑎𝑛 𝑆𝑚𝑎𝑟𝑡 𝑃𝑜𝑠𝑖𝑡𝑖𝑜𝑛𝑒𝑟
𝐺𝑖𝑝(𝑠) = 1.0−0.2 𝐾𝑔/𝑐𝑚2
20−4 𝑚𝐴
𝐺𝑖𝑝(𝑠) = 0,05
Dari data diketahui bahwa sinyal yang diterima oleh actuator sebesar 0.2 – 1.0 Kg/cm2
dengan range pergeseran stroke valve sebesar 90°, sehingga gain actuator valve dapat
diperoleh melalui persamaan:
𝐺𝑎𝑐𝑡𝑢𝑎𝑡𝑜𝑟(𝑠) = 𝑝𝑒𝑟𝑔𝑒𝑠𝑒𝑟𝑎𝑛 𝑠𝑡𝑟𝑜𝑘𝑒 𝑣𝑎𝑙𝑣𝑒
𝑠𝑖𝑛𝑦𝑎𝑙 𝑚𝑎𝑠𝑢𝑘𝑎𝑛 𝑎𝑐𝑡𝑢𝑎𝑡𝑜𝑟
𝐺𝑎𝑐𝑡𝑢𝑎𝑡𝑜𝑟(𝑠) = 90ᵒ
1−0.2 𝐾𝑔/𝑐𝑚2
𝐺𝑎𝑐𝑡𝑢𝑎𝑡𝑜𝑟(𝑠) = 112,5
Gain body valve dipengaruhi oleh besar gain smart positioner dan juga gain actuator.
untuk mencari gain body valve dapat diperoleh melalui persamaan berikut:
𝐺𝑏𝑜𝑑𝑦𝑣𝑎𝑙𝑣𝑒(𝑠) = 1
𝜏𝑠+1
Dimana, 𝜏 adalah time constant valve, artinya 𝜏 waktu yang dibutuhkan oleh valve untuk
mencapai kondisi bukaan sebesar 63,2% dari bukaan penuhnya. Temperature control valve
membutuhkan waktu 1,6 detik untuk mencapai kondisi bukaan penuh, sehingga time constant
valve dapat diperoleh melalui persamaan berikut:
𝜏 = 63,2% x 1,6 = 1,01 detik
Setelah melakukan perhitungan – perhitungan komponen control valve diatas, maka
dapat diperoleh fungsi alih dari control valve sebagai berikut:
𝐺𝑐𝑣(𝑠) = 𝐺𝑠𝑝(𝑠) 𝑥 𝐺𝑎𝑐𝑡𝑢𝑎𝑡𝑜𝑟(𝑠) 𝑥 𝐺𝑏𝑜𝑑𝑦𝑣𝑎𝑙𝑣𝑒(𝑠)
𝐺𝑐𝑣(𝑠) = 𝐺𝑖𝑝(𝑠) 𝑥 𝐺𝑎𝑐𝑡𝑢𝑎𝑡𝑜𝑟(𝑠) 𝑥 1
𝜏𝑠+1
𝐺𝑐𝑣(𝑠) = 0,05 x 112,5 x 1
1,01𝑠+1
𝐺𝑐𝑣(𝑠) = 5,625
1,01𝑠+1
Fungsi alih proses dapat diperoleh melalui pengambilan data yang dilakukan dengan
metode bump test pada Control Room. Metode bump test dilakukan dengan cara
memanualkan aksi kontrol terhadap kontroler yang semula memiliki aksi kontrol auto pada
keadaan stabil. Dengan memanualkan aksi kontrol kontroler maka proses akan tetap berada
pada posisi terakhirnya sebelum aksi kontrol diubah. Dengan metode bump test, proses perlu
diubah dengan mengubah MV yang dihasilkan oleh controller.
Dalam hal ini, set point (SP) dari controller diatur pada 80° dengan temperature
minimum 1° dan temperature maximum 100°. Besar SP diatur sedemikian rupa karena apabila
control valve semakin dibuka maka temperature pada Direct Contact Heater akan semakin
naik dengan cepat. Oleh karena itu, range antara SP dengan keadaan control valve pada saat
Galih Aldy Pratama, SNTEM, Volume 1, November 2021, hal. 1167-1178
1173
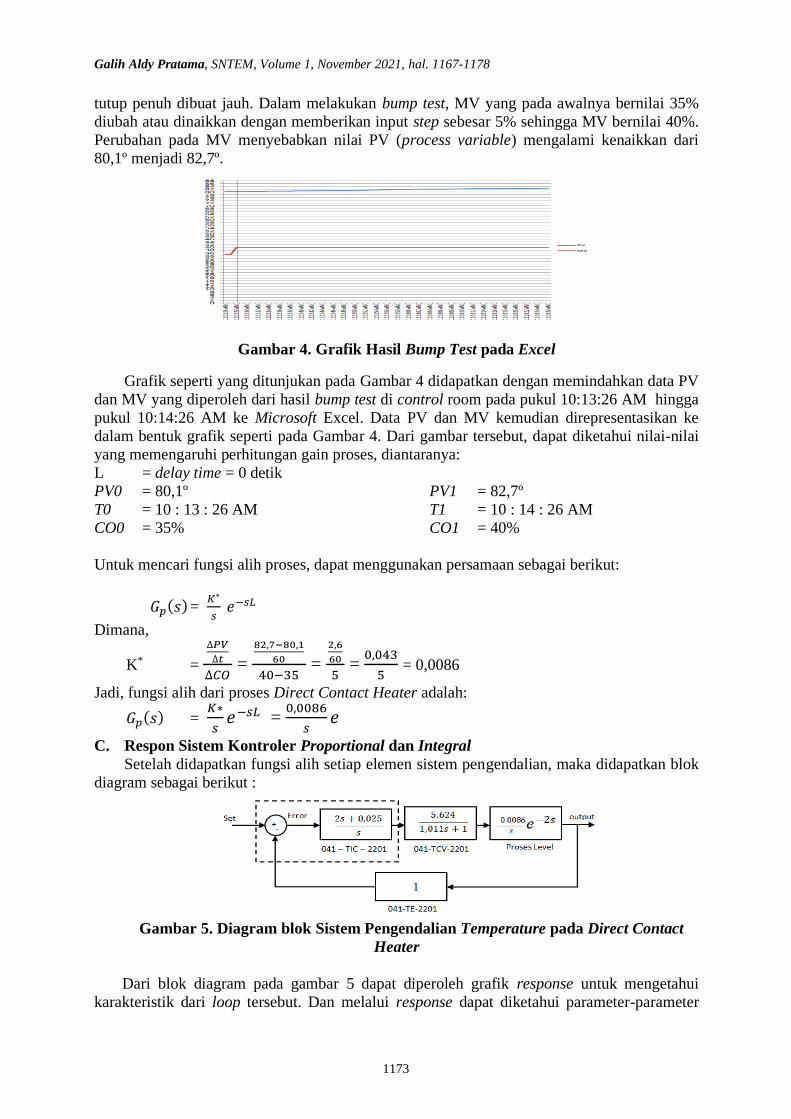
tutup penuh dibuat jauh. Dalam melakukan bump test, MV yang pada awalnya bernilai 35%
diubah atau dinaikkan dengan memberikan input step sebesar 5% sehingga MV bernilai 40%.
Perubahan pada MV menyebabkan nilai PV (process variable) mengalami kenaikkan dari
80,1º menjadi 82,7º.
Gambar 4. Grafik Hasil Bump Test pada Excel
Grafik seperti yang ditunjukan pada Gambar 4 didapatkan dengan memindahkan data PV
dan MV yang diperoleh dari hasil bump test di control room pada pukul 10:13:26 AM hingga
pukul 10:14:26 AM ke Microsoft Excel. Data PV dan MV kemudian direpresentasikan ke
dalam bentuk grafik seperti pada Gambar 4. Dari gambar tersebut, dapat diketahui nilai-nilai
yang memengaruhi perhitungan gain proses, diantaranya:
L = delay time = 0 detik
PV0 = 80,1º PV1 = 82,7º
T0 = 10 : 13 : 26 AM T1 = 10 : 14 : 26 AM
CO0 = 35% CO1 = 40%
Untuk mencari fungsi alih proses, dapat menggunakan persamaan sebagai berikut:
𝐺𝑝(𝑠) = 𝐾∗
𝑠 𝑒−𝑠𝐿
Dimana,
K* =
∆𝑃𝑉
∆𝑡
∆𝐶𝑂 =
82,7−80,1
60
40−35 =
2,6
60
5 =
0,043
5 = 0,0086
Jadi, fungsi alih dari proses Direct Contact Heater adalah:
𝐺𝑝(𝑠) = 𝐾∗
𝑠𝑒−𝑠𝐿 =
0,0086
𝑠𝑒
C. Respon Sistem Kontroler Proportional dan Integral
Setelah didapatkan fungsi alih setiap elemen sistem pengendalian, maka didapatkan blok
diagram sebagai berikut :
Gambar 5. Diagram blok Sistem Pengendalian Temperature pada Direct Contact
Heater
Dari blok diagram pada gambar 5 dapat diperoleh grafik response untuk mengetahui
karakteristik dari loop tersebut. Dan melalui response dapat diketahui parameter-parameter

Galih Aldy Pratama, SNTEM, Volume 1, November 2021, hal. 1167-1178
1174
berupa time constant, settling time, time delay, error steady state, dan overshoot. Adapun
pemodelan sistem pengendalian level pada Direct Contact Heater menggunakan PI actual
dapat dilakukan seperti gambar 6.
Gambar 6. Simulink Proses Sistem Pengendalian Temperature pada Direct Contact
Heater dengan PI Actual
Hasil Simulink sistem pengendalian temperature pada Direct Contact Heater
menggunakan PI actual dapat dilihat pada gambar 7.
Gambar 7. Grafik Proses Sistem Pengendalian Temperature pada Direct Contact
Heater dengan PI Actual
D. Analisa Kestabilan Pengendalian Temperature pada Direct Contact Heater
a. Metode Nyquist
Syarat stabilnya suatu sistem dilihat melalui persaman karakteristik dari system close
loop sistem sebagai berikut:
1 + G (s) x H (s)
Dalam perhitungan ini, H(s) sama nilainya dengan G(s) atau gain transmitter. Sedangkan
G(s) sama nilainya dengan perkalian antara gain controller, gain control valve, dan gain
proses. Dalam hal ini dapat digambarkan sebagai berikut : 𝐶(𝑠)
𝑅(𝑠)=
𝐺(𝑠)
1 + 𝐺(𝑠)𝐻(𝑠)
Perhitungan fungsi alih Persamaan Karakteristik (PK) dari sistem close loop
Gpk(s) = 1 + [Gc(s) x Gcv(s) x Gp(s)] x Gt(s)
= 1 + [2𝑠+0.025
𝑠 x
5,625
1,01𝑠+1 x
0,0086
𝑠 ] x 1
= 1,011𝑠3+𝑠²+0,097𝑠+0,0012
1,011𝑠3+𝑠²
Plot Nyquist Open Loop pada MatLab
Letak pole dan zero perlu dicari untuk membuktikan stabil atau tidaknya suatu sistem
pengendalian dengan cara memasukkan rumus syntax pada command windows seperti gambar
8.
Galih Aldy Pratama, SNTEM, Volume 1, November 2021, hal. 1167-1178
1175
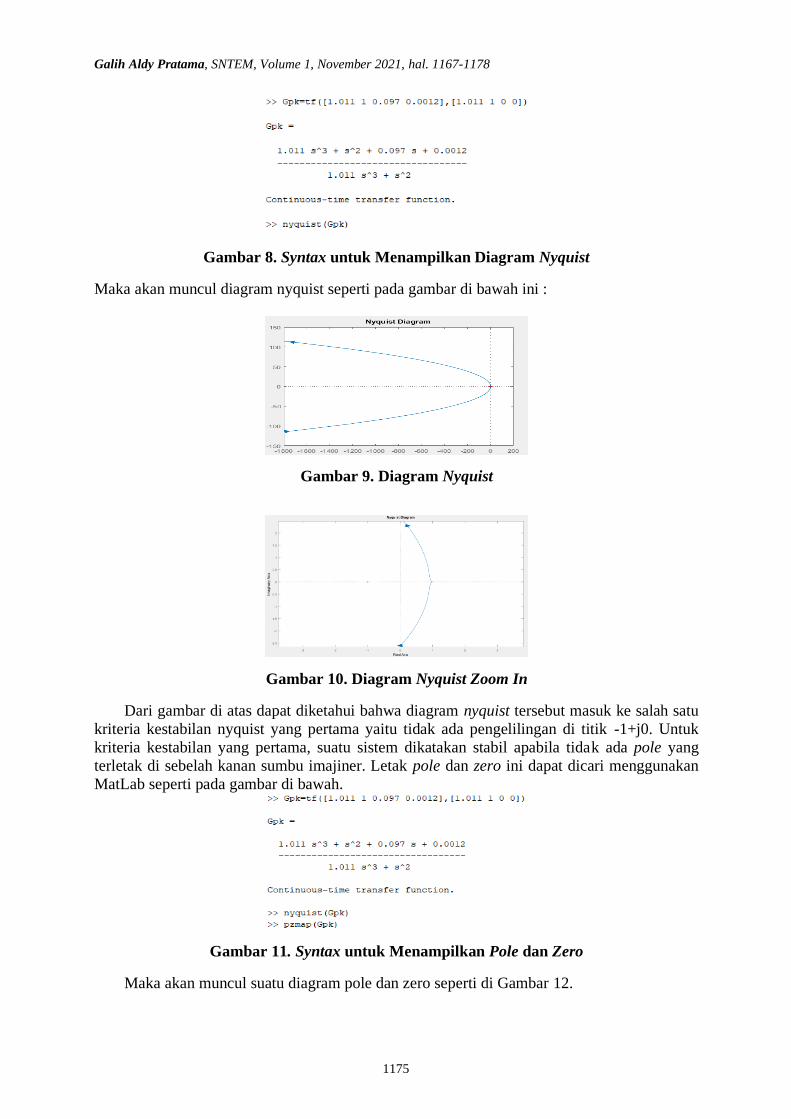
Gambar 8. Syntax untuk Menampilkan Diagram Nyquist
Maka akan muncul diagram nyquist seperti pada gambar di bawah ini :
Gambar 9. Diagram Nyquist
Gambar 10. Diagram Nyquist Zoom In
Dari gambar di atas dapat diketahui bahwa diagram nyquist tersebut masuk ke salah satu
kriteria kestabilan nyquist yang pertama yaitu tidak ada pengelilingan di titik -1+j0. Untuk
kriteria kestabilan yang pertama, suatu sistem dikatakan stabil apabila tidak ada pole yang
terletak di sebelah kanan sumbu imajiner. Letak pole dan zero ini dapat dicari menggunakan
MatLab seperti pada gambar di bawah.
Gambar 11. Syntax untuk Menampilkan Pole dan Zero
Maka akan muncul suatu diagram pole dan zero seperti di Gambar 12.

Galih Aldy Pratama, SNTEM, Volume 1, November 2021, hal. 1167-1178
1176
Gambar 12. Letak Pole dan Zero
Dari gambar di atas dapat dilihat bahwa tidak ada pole yang terletak di sebelah kanan
bidang imajiner karena pole satu terletak di titik -0.989+j0 sedangkan pole yang lain terletak
di titik 0+j0. Jadi sesuai dengan kriteria nyquist stability yaitu apabila persamaan close loop
tidak mempunyai pole di sebelah kanan sumbu imajiner dan tidak ada pengelilingan terhadap
titik -1+j0 maka sistem dikatakan stabil.
Mencari zero menggunakan fungsi alih open loop
Nilai zero dapat digunakan untuk menetapkan kestabilan suatu sistem dengan cara
mencari jumlah pole dan jumlah pengelilingan terhadap titik -1+j0 sesuai dengan persamaan
rumus :
Z = N+P
Jumlah p (pole) dapat dicari menggunakan MatLab dengan melihat akar-akar persamaan
dari denumerator atau penyebut fungsi alih open loop sebagai berikut :
Gambar 13. Akar-akar Persamaan Denumerator Dari akar-akar yang telah didapatkan memalui MatLab (command windows) di atas,
jumlah P atau pole yang berada di sebelah kanan sumbu imajiner adalah 0 (nol) sedangkan N
atau jumlah pengelilingan terhadap titik -1+j0 adalah 0 (nol), jadi dapat ditulis : Z = 0 + 0 = 0.
Sehingga dapat disimpulkan bahwa jumlah zero yang berada di sebelah kanan sumbu
imajiner adalah 0 (nol). Sesuai dengan kriteria Nyquist, apabila jumlah Z = N maka sistem
dapat dikatakan stabil.
b. Metode Root Locus
Kriteria kestabilan ini ditentukan melalui letak pole dan zero nya dari loop-nya. Open
loop dari sistem close loop temperature process :
G (s) x H (s)
Dimana.
G (s) = [Gc (s) x Gcv (s) x Gp (s)]
H (s) = Gt (s)
Perhitungan fungsi alih open loop system :
Galih Aldy Pratama, SNTEM, Volume 1, November 2021, hal. 1167-1178
1177
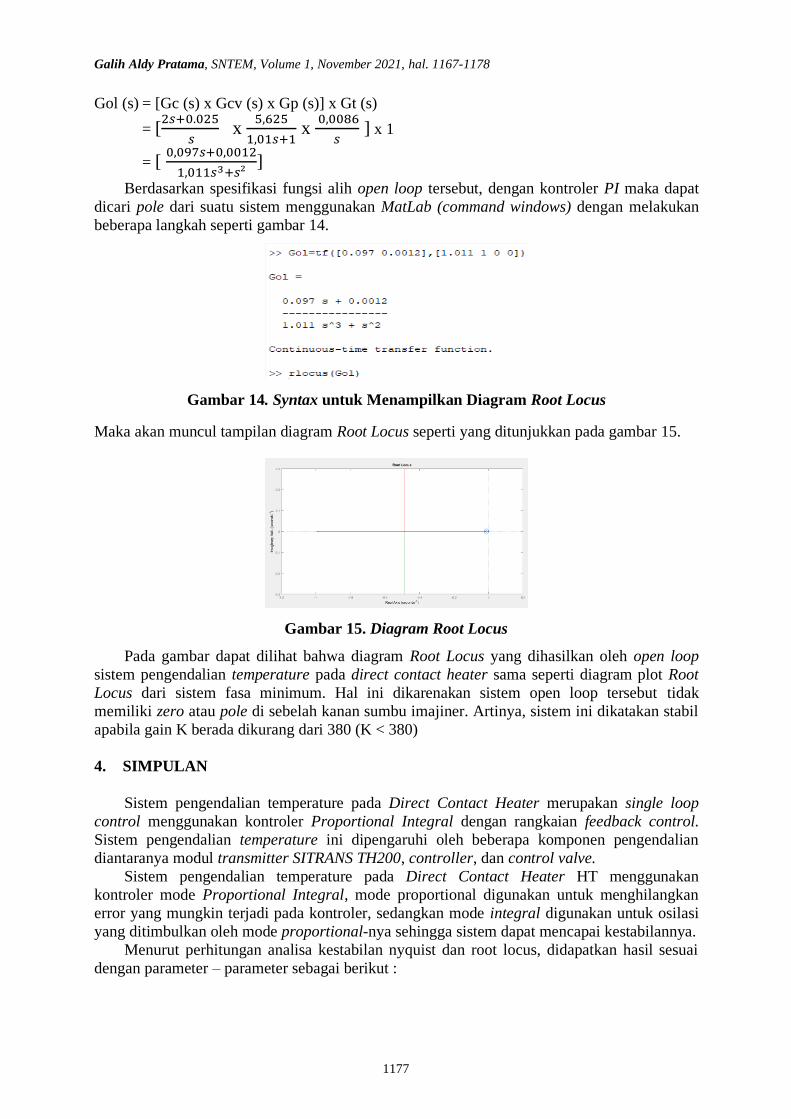
Gol (s) = [Gc (s) x Gcv (s) x Gp (s)] x Gt (s)
= [2𝑠+0.025
𝑠 x
5,625
1,01𝑠+1 x
0,0086
𝑠 ] x 1
= [ 0,097𝑠+0,0012
1,011𝑠3+𝑠²]
Berdasarkan spesifikasi fungsi alih open loop tersebut, dengan kontroler PI maka dapat
dicari pole dari suatu sistem menggunakan MatLab (command windows) dengan melakukan
beberapa langkah seperti gambar 14.
Gambar 14. Syntax untuk Menampilkan Diagram Root Locus
Maka akan muncul tampilan diagram Root Locus seperti yang ditunjukkan pada gambar 15.
Gambar 15. Diagram Root Locus Pada gambar dapat dilihat bahwa diagram Root Locus yang dihasilkan oleh open loop
sistem pengendalian temperature pada direct contact heater sama seperti diagram plot Root
Locus dari sistem fasa minimum. Hal ini dikarenakan sistem open loop tersebut tidak
memiliki zero atau pole di sebelah kanan sumbu imajiner. Artinya, sistem ini dikatakan stabil
apabila gain K berada dikurang dari 380 (K < 380)
4. SIMPULAN
Sistem pengendalian temperature pada Direct Contact Heater merupakan single loop
control menggunakan kontroler Proportional Integral dengan rangkaian feedback control.
Sistem pengendalian temperature ini dipengaruhi oleh beberapa komponen pengendalian
diantaranya modul transmitter SITRANS TH200, controller, dan control valve.
Sistem pengendalian temperature pada Direct Contact Heater HT menggunakan
kontroler mode Proportional Integral, mode proportional digunakan untuk menghilangkan
error yang mungkin terjadi pada kontroler, sedangkan mode integral digunakan untuk osilasi
yang ditimbulkan oleh mode proportional-nya sehingga sistem dapat mencapai kestabilannya.
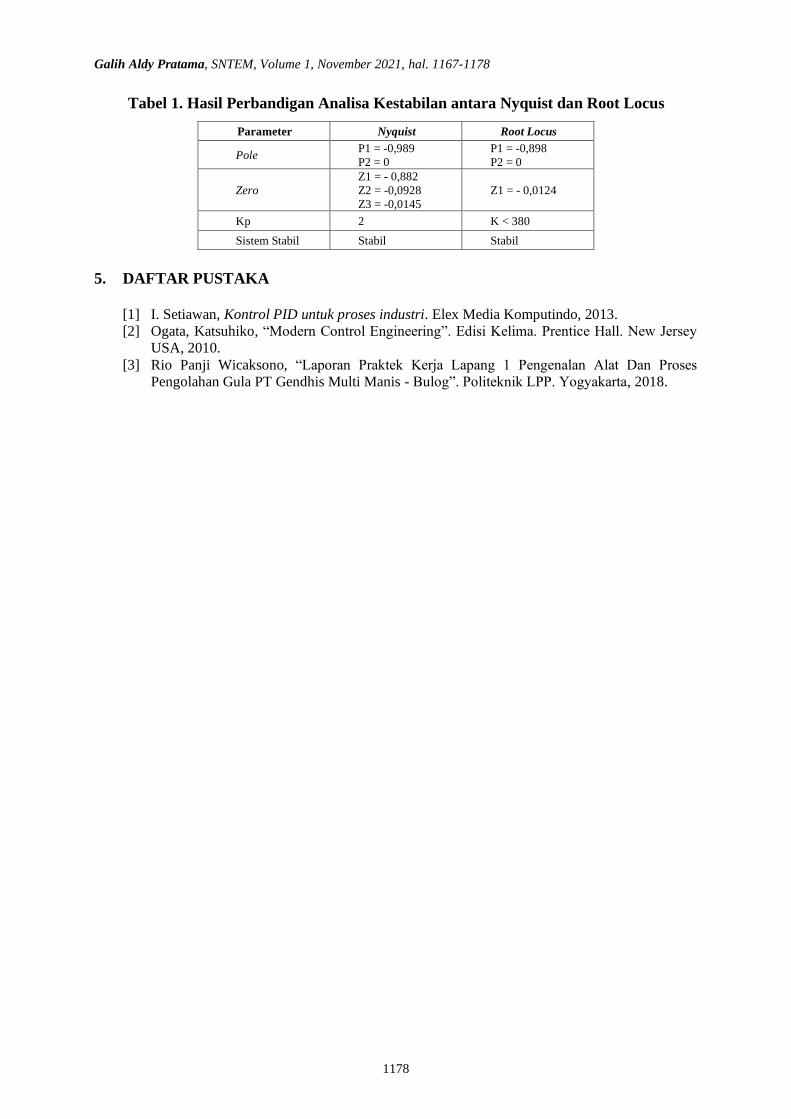
Menurut perhitungan analisa kestabilan nyquist dan root locus, didapatkan hasil sesuai
dengan parameter – parameter sebagai berikut :
Galih Aldy Pratama, SNTEM, Volume 1, November 2021, hal. 1167-1178
1178
Tabel 1. Hasil Perbandigan Analisa Kestabilan antara Nyquist dan Root Locus
Parameter Nyquist Root Locus
Pole P1 = -0,989
P2 = 0
P1 = -0,898
P2 = 0
Zero
Z1 = - 0,882
Z2 = -0,0928
Z3 = -0,0145
Z1 = - 0,0124
Kp 2 K < 380
Sistem Stabil Stabil Stabil
5. DAFTAR PUSTAKA
[1] I. Setiawan, Kontrol PID untuk proses industri. Elex Media Komputindo, 2013.
[2] Ogata, Katsuhiko, “Modern Control Engineering”. Edisi Kelima. Prentice Hall. New Jersey
USA, 2010.
[3] Rio Panji Wicaksono, “Laporan Praktek Kerja Lapang 1 Pengenalan Alat Dan Proses
Pengolahan Gula PT Gendhis Multi Manis - Bulog”. Politeknik LPP. Yogyakarta, 2018.
Related Documents











