رﻧﺠﺒﺮ: ﮐﻨﻨﺪﻩ ﺗﻬﻴﻪ ﺳﻮم ﺑﺨﺶ ﮐﻨﺘﺮل هﺎﯼ ﺳﻴﺴﺘﻢ ﺑﺮ اﯼ ﻣﻘﺪﻣﻪ------------------------------------------------------------------------------------------------------------------------------------------------------------------------- ﺻﻔﺤﻪ1 از21 • ﺳﺎزﯼ ﻣﺪل رﻳﺎﺿﯽ دﻳﻨﺎﻣﻴﮑﯽ ﺳﻴﺴﺘﻤﻬﺎﯼModelling of Dynamic Systems Mathematical ﻣﻘﺪﻣﻪ• ﺎﯼѧ هﺘﻢѧ ﺳﻴﺴﻪѧ ﻣﻄﺎﻟﻌ در ﺁﻧﻬﺎ دﻳﻨﺎﻣﻴﮑﯽ ﻣﺸﺨﺼﺎت ﺗﺤﻠﻴﻞ و دﻳﻨﺎﻣﻴﮑﯽ هﺎﯼ ﺳﻴﺴﺘﻢ رﻳﺎﺿﯽ ﺳﺎزﯼ ﻣﺪل ﺗﻮاﻧﺎﺋﯽ اﺳﺖ ﻣﻬﻢ ﺑﺴﻴﺎر ﮐﻨﺘﺮل. • ﻣﺪل ﺳﻴﯽѧ رﻳﺎﺿﺎѧ دﻗﻴﻘ راﺘﻢѧ ﺳﻴﺴﺎﻣﻴﮑﯽѧ دﻳﻨﺎرѧ رﻓﺘﻪѧ ﮐﺖѧ اﺳﺎدﻻﺗﯽѧ ﻣﻌﻪѧ ﻣﺠﻤﻮﻋﺎﻣﻴﮑﯽѧ دﻳﻨﺘﻢѧ ﺴ" ﻪѧ ﺑﺪاﻗﻞѧ ﺣﺎѧ ﻳ دهﺪ ﻣﯽ ﻧﺸﺎن ﺧﻮﺑﯽ. • رﻳﺎﺿﯽ ﻣﺪلﺰѧ ﻧﻴﺮدѧ ﻓﻪѧ ﺑﺮѧ ﻣﻨﺤﺼﻪѧ اﻟﺒﺘﻪѧ ﮐﺖѧ اﺳﺮلѧ ﮐﻨﺘﺘﻤﻬﺎﯼѧ ﺳﻴﺴ درﺎﺋﻞѧ ﻣﺴﻞѧ ﺗﺤﻠﻴ ﺑﺨﺶ ﻣﻬﻤﺘﺮﻳﻦ ﻣﻨﺎﺳﺐ ﺑﺎﺷﺪ ﻧﻤﯽ. • ﺎѧ ﻋﻤﻮﻣ" ﺣﺮاﯽ،ѧ اﻟﮑﺘﺮوﻧﻴﮑﺎﻧﻴﮑﯽ،ѧ ﻣﮑ ازﻢѧ اﻋﺘﻤﻬﺎѧ ﺳﻴﺴﺎﻣﻴﮑﯽѧ دﻳﻨﺎرѧ رﻓﺘ وﯽѧ رﺗ... ѧ ﺑﻮانѧ ﺗﯽѧ ﻣ را ﺎﺎدﻻتѧ ﻣﻌ ﺷﻮﻧﺪ ﻣﯽ اﺳﺘﺨﺮاج ﺳﻴﺴﺘﻢ ﺑﺮ ﺣﺎﮐﻢ ﻓﻴﺰﻳﮑﯽ ﻗﻮاﻧﻴﻦ از ﮐﻪ داد ﻧﺸﺎن دﻳﻔﺮاﻧﺴﻴﻞ. • ﺪѧ دارﻧﺎوﺗﯽѧ ﻣﺘﻔﮑﺎلѧ اﺷﯽѧ رﻳﺎﺿﺎﯼѧ هﺪلѧ ﻣ. ﺜﻼѧ ﻣ" ﻪѧ ﺑﻬﻴﻨﺮلѧ ﮐﻨﺘﺎﺋﻞѧ ﻣﺴ در(Adaptive control) ازﺘﻔﺎدﻩѧ اﺳ ﻓﺮﮐﺎﻧﺴ ﭘﺎﺳﺦ ﻳﺎ ﮔﺬرا رﻓﺘﺎر ﺗﺤﻠﻴﻞ در وﻟﯽ اﺳﺖ ﻣﻔﻴﺪ ﺣﺎﻟﺖ ﻓﻀﺎﯼ ﻧﻤﺎﻳﺶ ورودﯼﮏѧ ﻳﺎѧ ﺑﯽѧ ﺧﻄﺘﻤﻬﺎﯼѧ ﺳﻴﺴ ﯽ– اﺳﺖ ﻣﻨﺎﺳﺒﺘﺮ ﺗﺒﺪﻳﻞ ﺗﺎﺑﻊ ﻧﻤﺎﻳﺶ ﺧﺮوﺟﯽ. • ﺬﻳﺮﯼѧ ﭘ ﺟﻤﻊ ﻗﺎﻋﺪﻩ از ﺗﺒﻌﻴﺖ ﺧﻄﻲ ﺳﻴﺴﺘﻢ ﻳﮏ ﻻزﻣﻪ( principle of superposition) ﺖѧ اﺳ. ﻦѧ اﻳﺎﺑﻖѧ ﻣﻄ اﺳﺖ هﺎ ورودﯼ ﺗﮏ ﺗﮏ ﺑﻪ ﭘﺎﺳﺦ ﺟﻤﻊ ﺗﺤﺮﻳﮏ ﺗﺎﺑﻊ دو هﻤﺰﻣﺎن اﻋﻤﺎل از ﻧﺎﺷﯽ ﭘﺎﺳﺦ اﺻﻞ. • رﻳﺎﯼѧѧѧѧѧ هﺪلѧѧѧѧѧ ﻣ ﺧﺪѧѧѧѧѧ ﺗﻮاﻧﻨﯽѧѧѧѧѧ ﻣﯽѧѧѧѧѧ ﺎﺿﯽѧѧѧѧѧ ﻄ(linear) ﯽѧѧѧѧѧ ﻏﻴﺮﺧﻄﺎѧѧѧѧѧ ﻳ(non-linear) ﺎنѧѧѧѧѧ زﻣ ازﺎﺑﻌﻲѧѧѧѧѧ ﺗ، (time variant) زﻣﺎن از ﻣﺴﺘﻘﻞ ﻳﺎ(time-invariant) ﺑﺎﺷﻨﺪ. • زﻣﺎن از ﻣﺴﺘﻘﻞ هﺎﯼ ﺳﻴﺴﺘﻢ(time-invariant) ﻣﻌﺎدﻻت ﺑﺎ دﻳﻔﺮاﻧﺴﻴﻞﺎنѧ زﻣ از ﻣﺴﺘﻘﻞ) ﺖѧ ﺛﺎﺑﺮاﺋﺐѧ ﺿﺎѧ ﺑ( ﺑﻴﺎن ﻣﺜﺎل ﺑﻄﻮر ﺷﻮﻧﺪ، ﻣﯽ: c dx dy dx y d = + 2 2 2 1 α α از ﻣﺴﺘﻘﻞ ﻣﺪﻟﯽ ﺑﻴﺎن را زﻣﺎن ﮐﻨﺪ ﻣﯽ. • ﺎنѧѧ زﻣﻪѧѧ ﺑﺘﻪѧѧ واﺑﺴﺘﻤﻬﺎﯼѧѧ ﺳﻴﺴ(time-variant) ﺎنѧѧ ﺑﻴﺎﻧﯽѧѧ زﻣﺘﻪѧѧ واﺑﺴﺮاﺋﺐѧѧ ﺿﺎѧѧ ﺑﻴﻞѧѧ دﻳﻔﺮاﻧﺴﺎدﻻتѧѧ ﻣﻌﺎѧѧ ﺑ ﺷﻮﻧﺪ ﻣﯽ. ﻣﺜﺎل ﺑﻄﻮر ﻣﻌﺎدﻟﻪx y dx y d t = + 2 2 2 ﺁن در ﮐﻪt ﺎنѧ زﻣ از ﺗﺎﺑﻌﯽ ﻣﺪﻟﯽ اﺳﺖ، زﻣﺎن ﻣﺘﻐﻴﺮ ﻧﻤﺎﻳﺎﻧﮕﺮ اﺳﺖ. ﮐﻨﺪ ﻣﯽ ﺗﻐﻴﻴﺮ زﻣﺎن ﺑﺎ ﺿﺮاﺋﺐ از ﻳﮑﯽ ﻳﻌﻨﯽ. • ﺷﮑﻞ د ﻣﻌﺎدﻟﻪ ﮐﻠﯽ ﻳ ﻔﺮاﻧﺴﻴﻞ ﻣﺮﺗﺒﻪ ﺧﻄﯽn اﺳﺖ زﻳﺮ ﺑﺼﻮرت: 1 1 1 0 1 ( ) ( ) ( ) ( ) ( ) n n n n n n d y d y dy a x a x ax a x y g x dx dx dx − − − + + + + = ﻣﺜﺎل درﺳﯽ: 1 . ﻣﻌ ﻧﻤﺎﺋﻴﺪ ﺑﻨﺪﯼ دﺳﺘﻪ زﻣﺎﻧﯽ ﻣﺴﺘﻘﻞ ﻳﺎ زﻣﺎﻧﯽ واﺑﺴﺘﻪ ﺑﺮاﺳﺎس را زﻳﺮ دﻳﻔﺮاﻧﺴﻴﻞ ﺎدﻻت: ( ) ( ) iant var Time : 0 y t cos dt y d ) d iant var Time : 0 y 1 t 1 dt y d 1 t 1 ) c iant var Time : 0 y t dt d ) b iant var in Time : 0 y 2 dt y d ) a 2 2 2 2 2 2 2 − = + − = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + − = − = +

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 1صفحه
سيستمهای ديناميکی رياضی مدل سازی • Modelling of Dynamic SystemsMathematical
مقدمه ه سيستم های • توانائی مدل سازی رياضی سيستم های ديناميکی و تحليل مشخصات ديناميکی آنها در مطالع
. کنترل بسيار مهم استا رياضی سي مدل • اميکی سيستم را دقيق ار دين ه رفت ادالتی است ک اميکی مجموعه مع ه " ستم دين ا حداقل ب ي
.خوبی نشان می دهدز مدل رياضی • رد ني ه ف ه منحصر ب ه البت رل است ک ل مسائل در سيستمهای کنت مناسب مهمترين بخش تحلي
.نمی باشدا • انيکی، الکترونيکی، حرا" عموم اميکی سيستمها اعم از مک ار دين ی و رفت وان ب... رت ادالت ارا می ت مع
.ديفرانسيل نشان داد که از قوانين فيزيکی حاکم بر سيستم استخراج می شوندد • اوتی دارن دل های رياضی اشکال متف ثال .م ه " م رل بهين استفاده از (Adaptive control)در مسائل کنت
ا يک ورودی نمايش فضای حالت مفيد است ولی در تحليل رفتار گذرا يا پاسخ فرکانس ی سيستمهای خطی ب .خروجی نمايش تابع تبديل مناسبتر است –
ذيری • ن .است (principle of superposition )الزمه يک سيستم خطي تبعيت از قاعده جمع پ مطابق اي .اصل پاسخ ناشی از اعمال همزمان دو تابع تحريک جمع پاسخ به تک تک ورودی ها است
ای ري • دل ه د خ م ی توانن ی م ی اض ی (linear)ط ا غيرخط ان (non-linear)ي ابعي از زم ، ت(time variant) يا مستقل از زمان(time-invariant) باشند .
ان ديفرانسيل با معادالت (time-invariant)سيستم های مستقل از زمان • ا ضرائب ثابت ( مستقل از زم )ب
c: می شوند، بطور مثال بيانdxdy
dxyd
=+ 22
2
1 αα می کند زمان را بيانمدلی مستقل از.
ان • ه زم ته ب تمهای وابس ان (time-variant) سيس انی بي ته زم رائب وابس ا ض يل ب ادالت ديفرانس ا مع ب
xyمعادلهبطور مثال . می شوندdx
ydt =+2
2ان tکه در آن 2 نمايانگر متغير زمان است، مدلی تابعی از زم
.يعنی يکی از ضرائب با زمان تغيير می کند. است :بصورت زير است nخطی مرتبه فرانسيل يکلی معادله دشکل •
1
1 1 01( ) ( ) ( ) ( ) ( )n n
n nn n
d y d y dya x a x a x a x y g xdx dx dx
−
− −+ + + + =
:درسی مثال :ادالت ديفرانسيل زير را براساس وابسته زمانی يا مستقل زمانی دسته بندی نمائيدمع .1
( )
( ) iantvarTime:0ytcosdt
yd)d
iantvarTime:0y1t
1dt
yd1t
1)c
iantvarTime:0ytdtd)b
iantvarinTime:0y2dt
yd)a
2
2
2
2
2
2
2
−=+
−=⎟⎠⎞
⎜⎝⎛
++⎟
⎠⎞
⎜⎝⎛
+
−=
−=+
مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 2صفحه
.معادالت ديفرانسيل زير را بر اساس خطی يا غير خطی بودن آنها دسته بندی نمائيد .2
Linear:0x2sindt
ydxcos)e
linearNon:0y2sindt
ydycos)d
linearNon:0ydtdy)c
Linear:0ydt
yd)b
Linear:0ydtdy)a
2
2
2
2
2
2
2
=+
−=+
−=+
=+
=+
:ا بدست آوريدسيستم زير ر yپاسخ superpositionبا استفاده از قاعده .3
( ) 5tdt
t2costsindy 2 ×⎥⎦⎤
⎢⎣⎡ −
+=
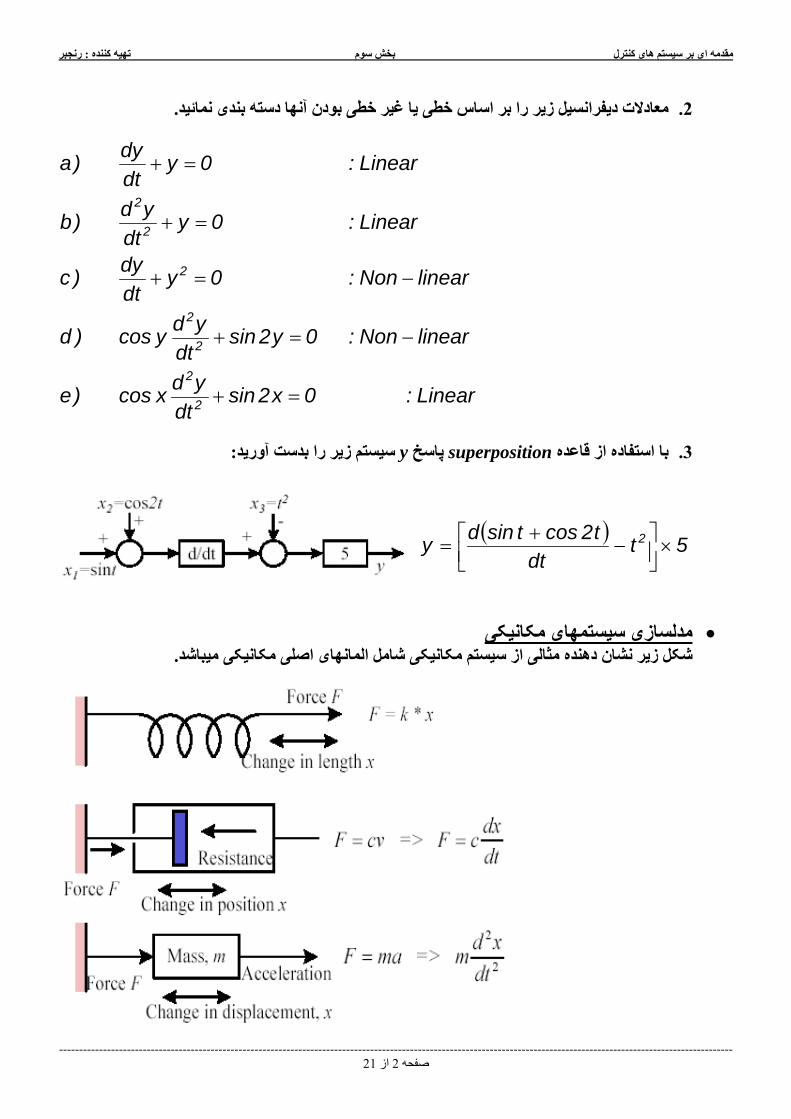
سيستمهای مکانيکی سازیمدل •
.شکل زير نشان دهنده مثالی از سيستم مکانيکی شامل المانهای اصلی مکانيکی ميباشد

مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 3صفحه
:مدل رياضی سيستم جرم، فنر و دمپر مطابق شکل زير را بدست آوريد :مثال
:عبارتست از mخالص نيروی وارده بر جرم :حل
dtdxckxF
cvkxF
−−=
−−=
:جرم برابر است بااينرسی همچنين نيروی
2
2
dtxdmma ==
:بنابراين
Fkxdtdxc
dtxdm 2
2
=++
مدل رياضی سيستم تعليق اتومبيل: مثال .مدل رياضی سيستم را بدست آوريد*
مدلسازی سيستمهای الکتريکیدار . شامل مقاومت و خازن می باشد مداری ه دو سر م در اين سيستم هدف تعيين رابطه بين ولتاژ اعمال شده ب
.و ولتاژ اندازه گيری شده دو سر خازن می باشد
:با اعمال قانون دوم کيرشف
مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 4صفحه
oRi VVV +=
iRVR که dtو =dVCidti
CV o
o =⇒= ∫1
dt : لذاdVCRVV o
oi +=
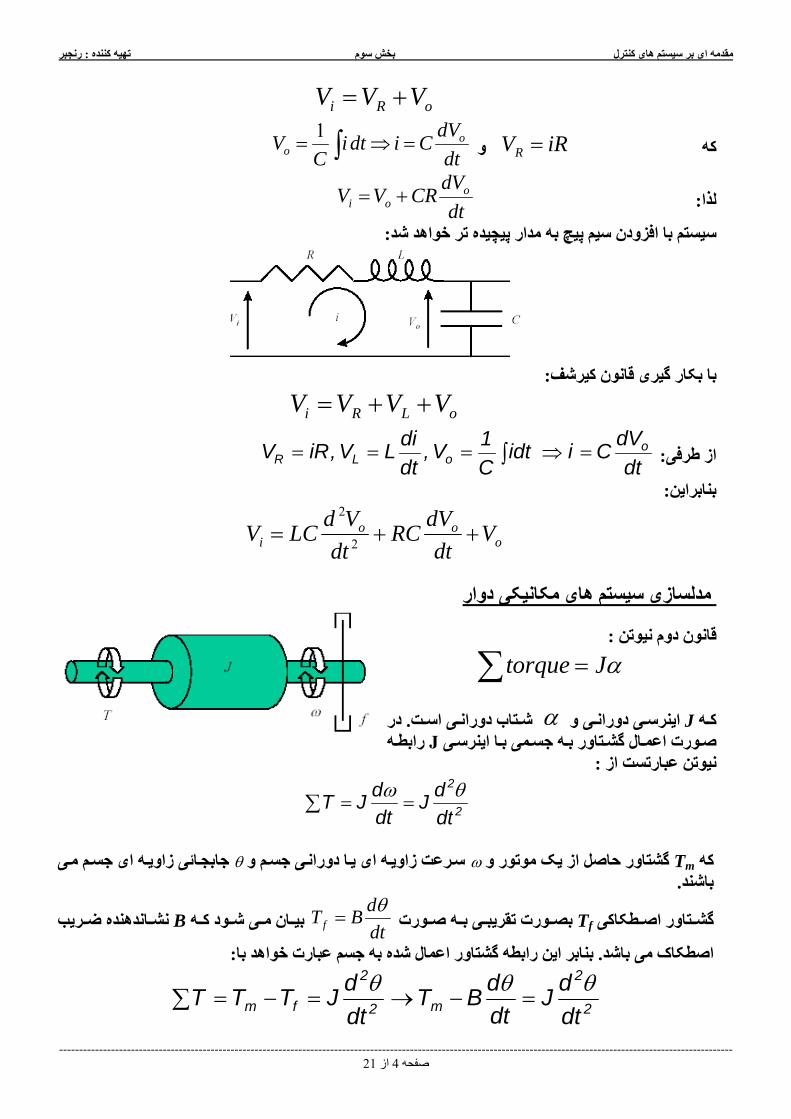
:سيستم با افزودن سيم پيچ به مدار پيچيده تر خواهد شد
:با بکار گيری قانون کيرشف
oLRi VVVV ++=
dt: از طرفیdVCiidt
C1V,
dtdiLV,iRV o
oLR =⇒=== ∫
:بنابراين
ooo
i Vdt
dVRCdt
VdLCV ++= 2
2
مدلسازی سيستم های مکانيکی دوار
:قانون دوم نيوتن
∑ = αJtorque
ه ی Jک ی و داينرس ی است αوران تاب دوران در . شا اينرسی ه جسمی ب تاور ب ال گش ه Jصورت اعم رابط
:نيوتن عبارتست از
2
2
dtdJ
dtdJT θω
==∑
ی جسم و ωگشتاور حاصل از يک موتور و Tmکه ا دوران ه ای ي ه ای جسم می جابجائی زاو θسرعت زاوي ي
. باشند
طکاکی تاور اص ورت Tfگش ه ص ی ب ورت تقريب dtبصdBTfθ
ه = ود ک ی ش ان م ريب Bبي اندهنده ض نش
:بنابر اين رابطه گشتاور اعمال شده به جسم عبارت خواهد با. اصطکاک می باشد
2
2
m2
2
fm dtdJ
dtdBT
dtdJTTT θθθ
=−→=−=∑
مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 5صفحه
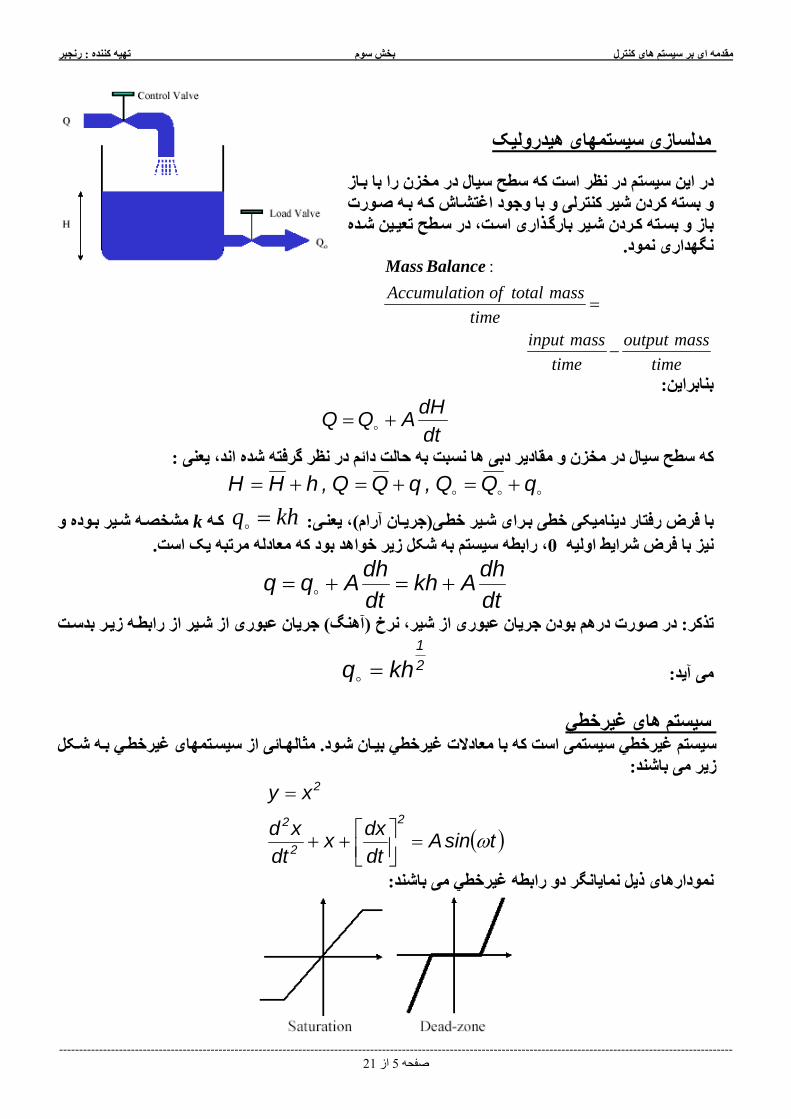
مدلسازی سيستمهای هيدروليک
از در اين سيستم در نظر است که سطح سي ال در مخزن را با ب
ه صورت ه ب و بسته کردن شير کنترلی و با وجود اغتشاش کين شده ذاری است، در سطح تعي ردن شير بارگ باز و بسته ک
. نگهداری نمود
timemassoutput
timemassinput
timemasstotalofonAccumulati
−
=
:BalanceMass
:بنابراين
dtdHAQQ +=
:ر گرفته شده اند، يعنی که سطح سيال در مخزن و مقادير دبی ها نسبت به حالت دائم در نظqQQ,qQQ,hHH +=+=+=
رای شير خطی ان آرام (با فرض رفتار ديناميکی خطی ب ی )جري khq: ، يعن ه = وده و kک مشخصه شير ب .رابطه سيستم به شکل زير خواهد بود که معادله مرتبه يک است ،0 نيز با فرض شرايط اوليه
dtdhAkh
dtdhAqq +=+=
ر بدست ) آهنگ(در صورت درهم بودن جريان عبوری از شير، نرخ : تذکر جريان عبوری از شير از رابطه زي
2 :می آيد1
khq = سيستم های غيرخطي
ان شود ه شکل . سيستم غيرخطي سيستمی است که با معادالت غيرخطي بي ائی از سيستمهای غيرخطي ب مثاله :زير می باشند
( )tsinAdtdxx
dtxd
xy2
2
2
2
ω=⎥⎦⎤
⎢⎣⎡++
=
:می باشندی ذيل نمايانگر دو رابطه غيرخطي نمودارها
مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 6صفحه
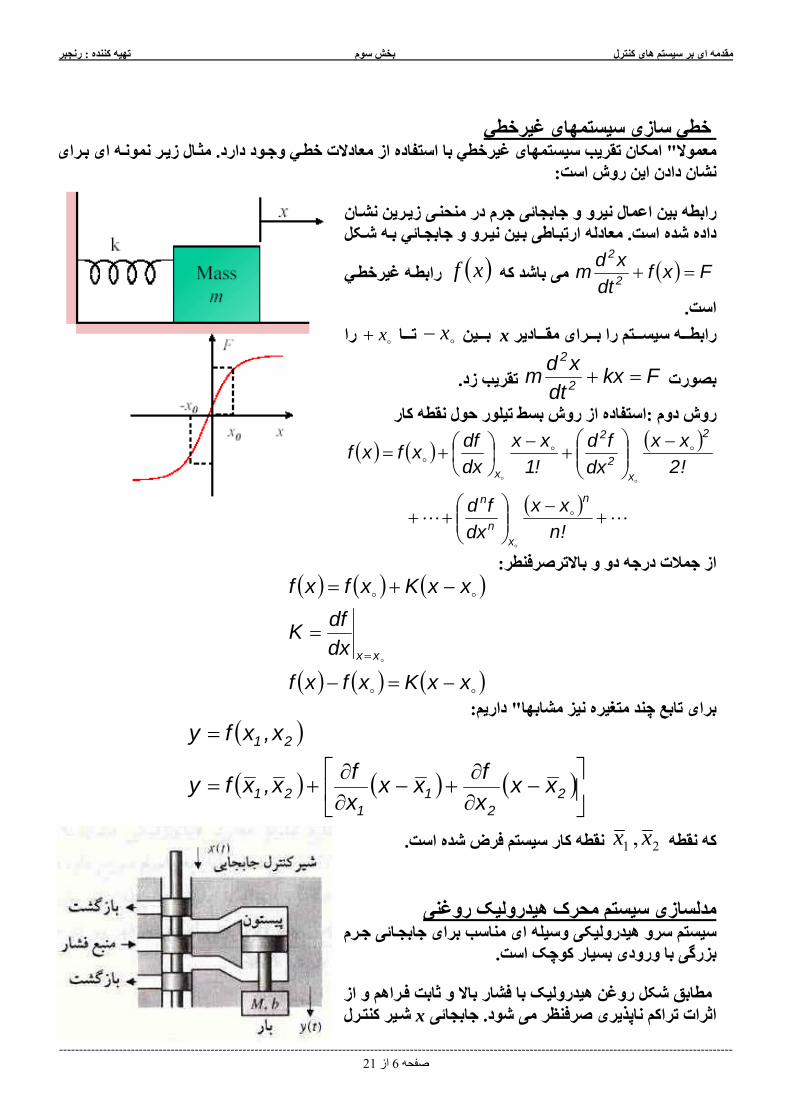
خطي سازی سيستمهای غيرخطي
رای . امکان تقريب سيستمهای غيرخطي با استفاده از معادالت خطي وجود دارد " معموال ه ای ب ر نمون ال زي مث :نشان دادن اين روش است
رين نشان رابطه بين اعمال نيرو و جابجائی جرم در منحنی زي
ه شکل . داده شده است رو و جابجائي ب ين ني اطی ب معادله ارتب
( ) Fxfdt
xdm 2
2
)می باشد که += )xf رابطه غيرخطي
. استادير رای مق تم را ب ه سيس ين xرابط ا −xب را +xت
Fkxبصورت dt
xdm 2
2
.تقريب زد +=
روش بسط تيلور حول نقطه کار استفاده از :دوم روش
( ) ( ) ( )
( )+
−⎟⎟⎠
⎞⎜⎜⎝
⎛++
−⎟⎟⎠
⎞⎜⎜⎝
⎛+
−⎟⎠⎞
⎜⎝⎛+=
!nxx
dxfd
!2xx
dxfd
!1xx
dxdfxfxf
n
xn
n
2
x2
2
x
:صرفنطرجمالت درجه دو و باالتراز ( ) ( ) ( )
( ) ( ) ( )xxKxfxf
dxdfK
xxKxfxf
xx
−=−
=
−+=
=
:داريم" تابع چند متغيره نيز مشابهابرای ( )
( ) ( ) ( )⎥⎦
⎤⎢⎣
⎡−
∂∂
+−∂∂
+=
=
22
11
21
21
xxxfxx
xfx,xfy
x,xfy
21که نقطه , xx قطه کار سيستم فرض شده استن.
مدلسازی سيستم محرک هيدروليک روغنیسيستم سرو هيدروليکی وسيله ای مناسب برای جابجائی جرم
.بزرگی با ورودی بسيار کوچک است
راهم و از مطابق شکل روغن هيدروليک با فشار باال و ثابت فرل شير کنت xجابجائی . اثرات تراکم ناپذيری صرفنظر می شود

مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 7صفحه
ذا جابجائی کوچک . را حرکت داده و روغن هيدروليکی به داخل سيلندر وارد می شود موجب جابجائی x(t)لاالی ان . می شود y(t)زياد با قدرت ب ا جابجائی ورودی Qدبی جري و تفاضل فشار دو طرف پيستون x(t)ب
:با استفاده از سری تيلور می توان نوشت. متناسب است Q = g(x,p)بصورت
PkxkPPgx
xgQ Px
x,PP,x oooo
−=⎟⎠⎞
⎜⎝⎛∂∂
+⎟⎠⎞
⎜⎝⎛∂∂
=
ooکه Px :لذا . می باشد A3Pنيروی ايجاد شده بوسيله پيستون برابر . نقطه کار سيستم می باشد ,
( )
dtdy
kAb
dtydMx
kAk
dtdyAQ
dtdyb
dtydMQxk
kA
dtdyb
dtydMPA
P
2
2
2
P
x
2
2
xP
2
2
⎟⎟⎠
⎞⎜⎜⎝
⎛++=
=
+=−
+=×
مدلسازی سيستمهای گرمائی
.را در نظر می گيريمسيستم گرمايشی مطابق شکل :معادله انرژی
)1(hhdtdC oi −=θ
.انتالپی سيال خروجی است hoانتالپی ورودی و hiکه
McCGcho
== θ
ا خروجی، Gو ژه cدبی جرمی سيال ورودی ي ائی وي ائی C، ظرفيت گرم جرم سيال داخل Mو ظرفيت گرم :چنانچه بگيريم. مخزن می باشد
GchR
o
1==
θ
:اشتخواهيم د (1)با جايگذاری درمعادله
همزن
گرمکن مايع گرم خروجی
مايع سرد i ورودی
i
io
RhdtdRC
hGcdtdC
hhdtdC
=+
=+
=+
θθ
θθ
θ
مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 8صفحه
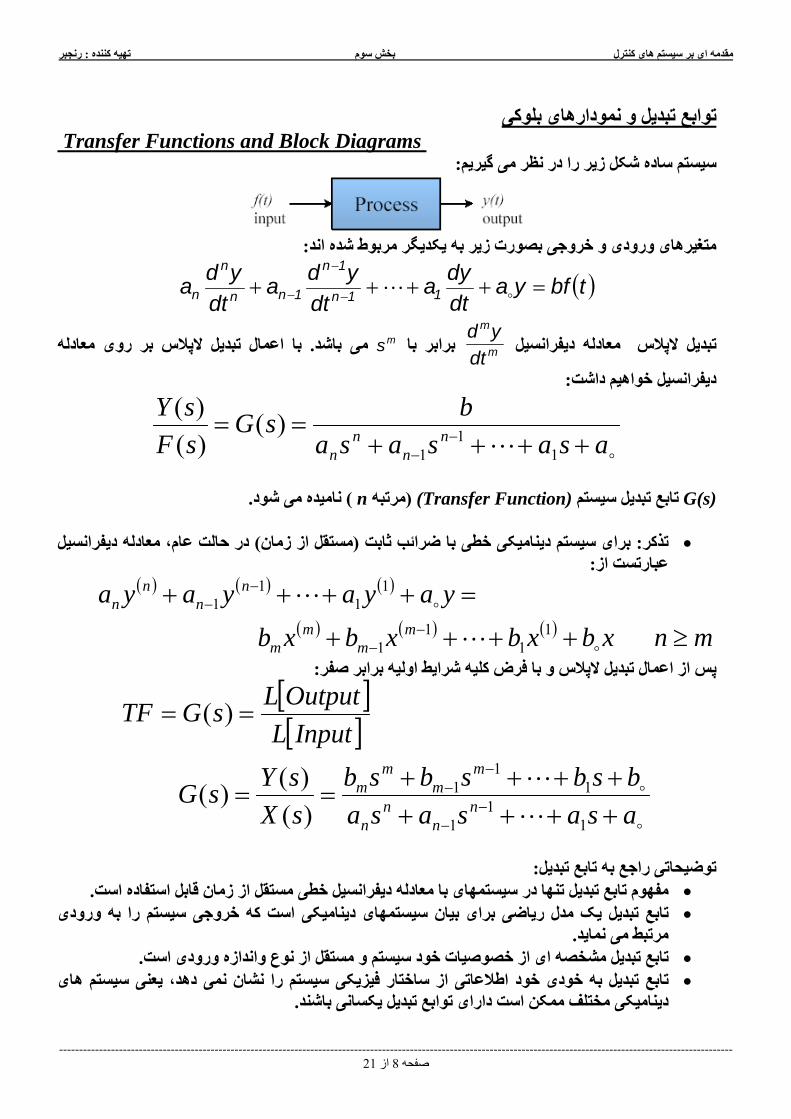
توابع تبديل و نمودارهای بلوکی
Transfer Functions and Block Diagrams :سيستم ساده شکل زير را در نظر می گيريم
:متغيرهای ورودی و خروجی بصورت زير به يکديگر مربوط شده اند
( )tbfyadtdya
dtyda
dtyda 11n
1n
1nn
n
n =++++ −
−
−
mتبديل الپالس معادله ديفرانسيل
m
dtyd
با اعمال تبديل الپالس بر روی معادله . می باشد msبا برابر
:ديفرانسيل خواهيم داشت
asasasabsG
sFsY
nn
nn ++++
== −− 1
11
)()()(
G(s) تابع تبديل سيستم(Transfer Function) ) مرتبهn (ناميده می شود.
م، معادله ديفرانسيل در حالت عا) مستقل از زمان(برای سيستم ديناميکی خطی با ضرائب ثابت : تذکر •
:عبارتست از( ) ( ) ( )
( ) ( ) ( ) mnxbxbxbxb
yayayayam
mm
m
nn
nn
≥++++
=++++−
−
−−
11
11
11
11
:پس از اعمال تبديل الپالس و با فرض کليه شرايط اوليه برابر صفر[ ][ ]
asasasabsbsbsb
sXsYsG
InputLOutputLsGTF
nn
nn
mm
mm
++++++++
==
==
−−
−−
11
1
11
1
)()()(
)(
:توضيحاتی راجع به تابع تبديل
.مفهوم تابع تبديل تنها در سيستمهای با معادله ديفرانسيل خطی مستقل از زمان قابل استفاده است •مهای ديناميکی است که خروجی سيستم را به ورودی تابع تبديل يک مدل رياضی برای بيان سيست •
.مرتبط می نمايد .تابع تبديل مشخصه ای از خصوصيات خود سيستم و مستقل از نوع واندازه ورودی است •تابع تبديل به خودی خود اطالعاتی از ساختار فيزيکی سيستم را نشان نمی دهد، يعنی سيستم های •
.بع تبديل يکسانی باشندديناميکی مختلف ممکن است دارای توا

مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 9صفحه
در صورت معلوم بودن تابع تبديل سيستم می توان خروجی را به ازاء ورودی های مختلف بدست • .آورده و آن را تحليل نمود
تابع تبديل يک سيستم را می توان بصورت تجربی و با اعمال ورودی های معلوم و برداشت و مطالعه •واند توصيف کاملی از مشخصات ديناميکی سيستم را در بر تابع تبديل حاصل می ت. خروجی بدست آورد
.داشته باشد ولی توصيف فيزيکی سيستم از آن بدست نمی آيد
:سيستم جرم، فنر و دمپر را در نظر می گيريم: 1مثال
Fkxdtdxc
dtxdm 2
2
=++
:با فرض شرايط اوليه صفر و اعمال تبديل الپالس خواهيم داشت( ) ( ) ( ) ( )sFskXscsXsXms2 =++
:بنابراين
( ) ( )( ) kcsms
1sFsXsG 2 ++
==
در اين بخش از تبديل الپالس فقط به منظور . جداول الپالس می توانند برای حل معادالت بکار گرفته شوند •
نمايش سيستمها به شکل مناسب استفاده شده و در بخش بعد از تبديل الپالس برای حل معادالت ديفرانسيل . سيستم استفاده خواهد شد
. را در نظر می گيريم hو خروجی qiسيستم هيدروليکی با ورودی : 2مثال
dtdhAkhqi +=
با استفاده از تبديل الپالس و اعمال آن بر روی رابطه مذکور خواهيم . کليه شرايط اوليه صفر فرض می شوند :داشت
( ) ( ) ( )sAsHskHsQi += :بنابراين
( ) ( )( ) kAs
1sQsHsG
i +==
يستمهای مرتبه اول و مرتبه دومس •
First and Second Order Systems
مرتبه سيستم عبارت از باالترين مرتبه مشتق در مدل معادله ديفرانسيل يا باالترين نما در مدل تبديل الپالس آن :به عنوان مثال. سيستم می باشد
ubyadtdya1 =+
:و تبديل الپالس مربوطه
( ) ( )( ) asa
bsUsYsG
1 +==
مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 10صفحه
:که با مرتب تر کردن عبارت خواهيم داشت
( ) ( ) 1saaabsG
1 +=
:که به شکل عمومی زير بيان می شود
( )1s
KsG
p
p
+=τ
سيستم معرفی شده و تعيين کننده ميزان مقدار تغيير در خروجی به ازاء ميزان (gain)به عنوان بهره Kpکه
به عنوان ثابت زمانی سيستم اطالق می گردد، که تعيين کننده سرعت pτ. دمعينی تغيير در ورودی می باش . عکس العمل سيستم به تغيير ورودی است
:سيستم درجه دو به شکل زير ارائه می گردد
ubyadtdya
dtyda 12
2
2 =++
:با اعمال تبديل الپالس
( ) ( )( ) asasa
bsUsYsG
12
2 ++==
:خواهيم داشت که با مرتب نمودن آن
( ) ( )( ) ( )221
22
aasaasabsG++
=
( ) 2nn
2
2n
s2sKsG
ωζωω
++=
.درجه ميرائی سيستم می باشد ζفرکانس طبيعی نوسان سيستم و nω، (gain)بهره سيستم Kکه :تمرين درسی •
:تبديل الپالس توابع زير را تعيين نمائيد .1
tetbta
22
2
))
−
:معکوس تبديل الپالس توابع زير را بدست آوريد .2
123)
2)
+sb
sa
.شروع شده است را بدست آوريد t = 0را که از 4Vتبديل الپالس ولتاژبا تابع پله ای . 3
مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 11صفحه
:تابع تبديل سيستم تعريف شده با رابطه ورودی خروجی زير را تعيين نمائيد. 4
dtdxxy
dtdy
dtyd
+=++ 232
2
اد : حل ه مق ا صفر و با فرض کلي ر ب ه براب وان خروجی و Y(s)ير اولي ه عن وان ورودی خواهيم X(s)ب ه عن ب :داشت
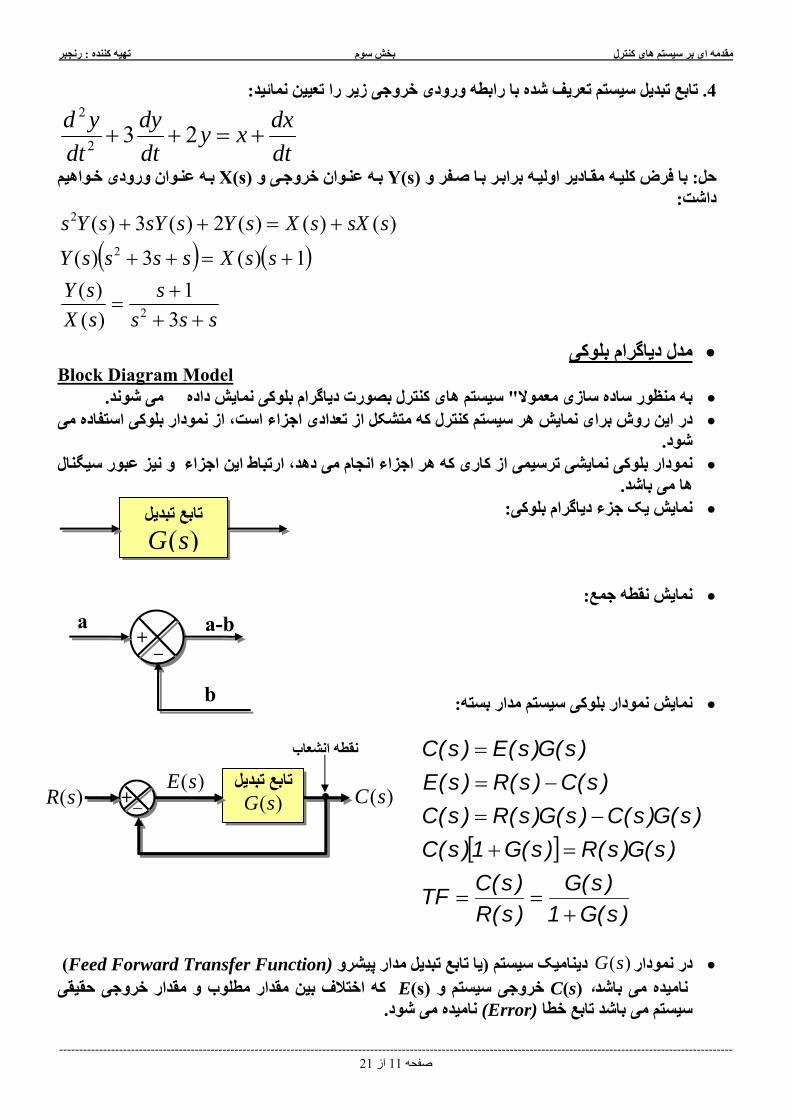
مدل دياگرام بلوکی •
Block Diagram Model . سيستم های کنترل بصورت دياگرام بلوکی نمايش داده می شوند" به منظور ساده سازی معموال •در اين روش برای نمايش هر سيستم کنترل که متشکل از تعدادی اجزاء است، از نمودار بلوکی استفاده می •
.شودنمودار بلوکی نمايشی ترسيمی از کاری که هر اجزاء انجام می دهد، ارتباط اين اجزاء و نيز عبور سيگنال •
.ها می باشد :نمايش يک جزء دياگرام بلوکی • :نمايش نقطه جمع • :نمايش نمودار بلوکی سيستم مدار بسته •
[ ]
)s(G1)s(G
)s(R)s(CTF
)s(G)s(R)s(G1)s(C)s(G)s(C)s(G)s(R)s(C
)s(C)s(R)s(E)s(G)s(E)s(C
+==
=+−=
−==
(Feed Forward Transfer Function) يا تابع تبديل مدار پيشرو(ديناميک سيستم sG)(در نمودار •
حقيقی که اختالف بين مقدار مطلوب و مقدار خروجی E(s)خروجی سيستم و C(s)، ناميده می باشد .ناميده می شود (Error)سيستم می باشد تابع خطا
تابع تبديل)(sG
_ +
b
a-ba
تابع تبديل)(sG _ + )(sR )(sC
)(sEنقطه انشعاب
( ) ( )
ssss
sXsY
ssXssssYssXsXsYssYsYs
+++
=
+=++
+=++
31
)()(
1)(3)()()()(2)(3)(
2
2
2
مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 12صفحه
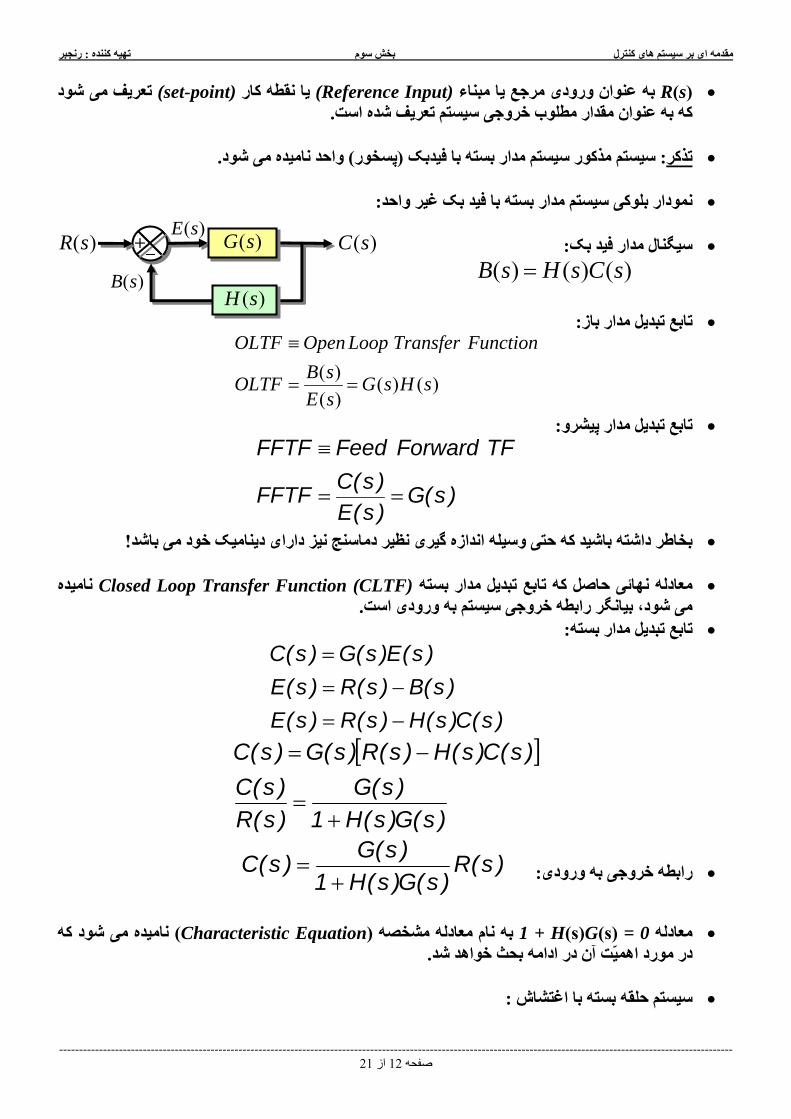
• R(s) به عنوان ورودی مرجع يا مبناء(Reference Input) يا نقطه کار(set-point) تعريف می شود . که به عنوان مقدار مطلوب خروجی سيستم تعريف شده است
.می شود واحد ناميده) پسخور(سيستم مذکور سيستم مدار بسته با فيدبک : تذکر • :نمودار بلوکی سيستم مدار بسته با فيد بک غير واحد • : سيگنال مدار فيد بک •
)()()( sCsHsB = :تابع تبديل مدار باز •
)()()()( sHsG
sEsBOLTF
FunctionTransferLoopOpenOLTF
==
≡
:تابع تبديل مدار پيشرو •
)s(G)s(E)s(CFFTF
TFForwardFeedFFTF
==
≡
! بخاطر داشته باشيد که حتی وسيله اندازه گيری نظير دماسنج نيز دارای ديناميک خود می باشد • ناميده Closed Loop Transfer Function (CLTF)حاصل که تابع تبديل مدار بسته معادله نهائی •
.می شود، بيانگر رابطه خروجی سيستم به ورودی است :تابع تبديل مدار بسته •
)s(C)s(H)s(R)s(E)s(B)s(R)s(E
)s(E)s(G)s(C
−=−=
=
[ ]
)s(G)s(H1)s(G
)s(R)s(C
)s(C)s(H)s(R)s(G)s(C
+=
−=
s(R(: رابطه خروجی به ورودی •)s(G)s(H1
)s(G)s(C+
=
ناميده می شود که (Characteristic Equation)به نام معادله مشخصه H(s)G(s) = 0 + 1معادله •
.در مورد اهمّيت آن در ادامه بحث خواهد شد :سيستم حلقه بسته با اغتشاش •
_ + )(sR )(sC)(sE )(sG
)(sH )(sB

مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 13صفحه
برای تعيين تابع تبديل سيستم با ورودی اغتشاش، مانند سيستم با دو ورودی به ازاء هر يک خروجی سيستم :با يکديگر جمع می کنيم را تعيين ونتيجه را
:پاسخ سيستم به ورودی اغتشاش •
)s(H)s(G)s(G1)s(G
)s(D)s(C
21
2D
+=
:پاسخ سيستم به ورودی مرجع •
)s(H)s(G)s(G1)s(G)s(G
)s(R)s(C
21
21R
+=
:پاسخ سيستم به ورودی اغتشاش و ورودی مرجع •
[ ])s(D)s(R)s(G)s(H)s(G)s(G1
)s(G)s(C
)s(C)s(C)s(C
121
2
DR
++
=
+=
: قواعد ساده سازی دياگرام های بلوکی •
_ + )(sR )(sC )(sE
)(sH
اغتشاش )(sD
+ + )(2 sG)(1 sG

مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 14صفحه
رابطه بين خروجی و ورودی و نيز اغتشاش . می باشند Cو خروجی U، اغتشاش Rورودی سيستم : مثال سيستم به شکل . به منظور کمک به محاسبات تعريف می شود" متغيری است که صرفا E. مطلوب نظر است
:زير می باشد
:سيستم به صورت زير حاصل می شود (CLTF)تابع تبديل مدار بسته : حل
( )[ ]
( )
UGGHG1
DGRGGHG1
GGGC
UDGGGRGGGHG1CUDGGGCHGGGRGC
GUDGGCHRCGG)CHR(EG)UDE(C
321
3
321
321
3321321
3321321
321
213
++
+=⇒
+=+⇒+−=⇒
+−=⇒−=+=
روش محاسباتی باال از روش مورد استفاده مستقيم متداول متفاوت بوده و با استفاده از قوانين ساده •
:اين قوانين يا اصول عبارتند از. را بدست آورد CLTFمندرج در جدول قبلی می توان :ير محاسبه می شودمخرج تابع تبديل کلی برای ورودی و اغتشاش يکسان بوده و بصورت ز
.حاصل ضرب توابع تبديل حلقه بسته می باشد -/+ 1بين ورودی و يا (Forward Path)صورت تابع تبديل کلی از حاصل ضرب توابع تبديل در مدار پيشرو
. اغتشاش و خروجی بدست می آيد
CLTF سيستم فوق با استفاده از اصول ذکر شده به صورت زير خواهد بود: به علت عالمت در مدار + عالمت ( حاصل ضرب توابع تبديل در مداربسته می باشد +1ابع تبديل مخرج ت .1
H321که برابر .) است، می باشد –فيدبک که GGG1+ خواهد بود . بين ورودی و خروجی " صورت برای جمله ورودی برابر با حاصل ضرب کليه توابع تبديل که مستقيما .2
321، می باشد که برابر قرار گرفته اند GGG صورت برای جمله اغتشاش برابر با حاصل ضرب . است
CLTFبنابراين . می باشد 3DGبين اغتشاش و خروجی می باشند يعنی " کليه توابع تبديل که مستقيما :سيستم مذکور به صورت زير خواهد بود
UGGHG1
DGRGGHG1
GGGC321
3
321
321
++
+=
مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 15صفحه
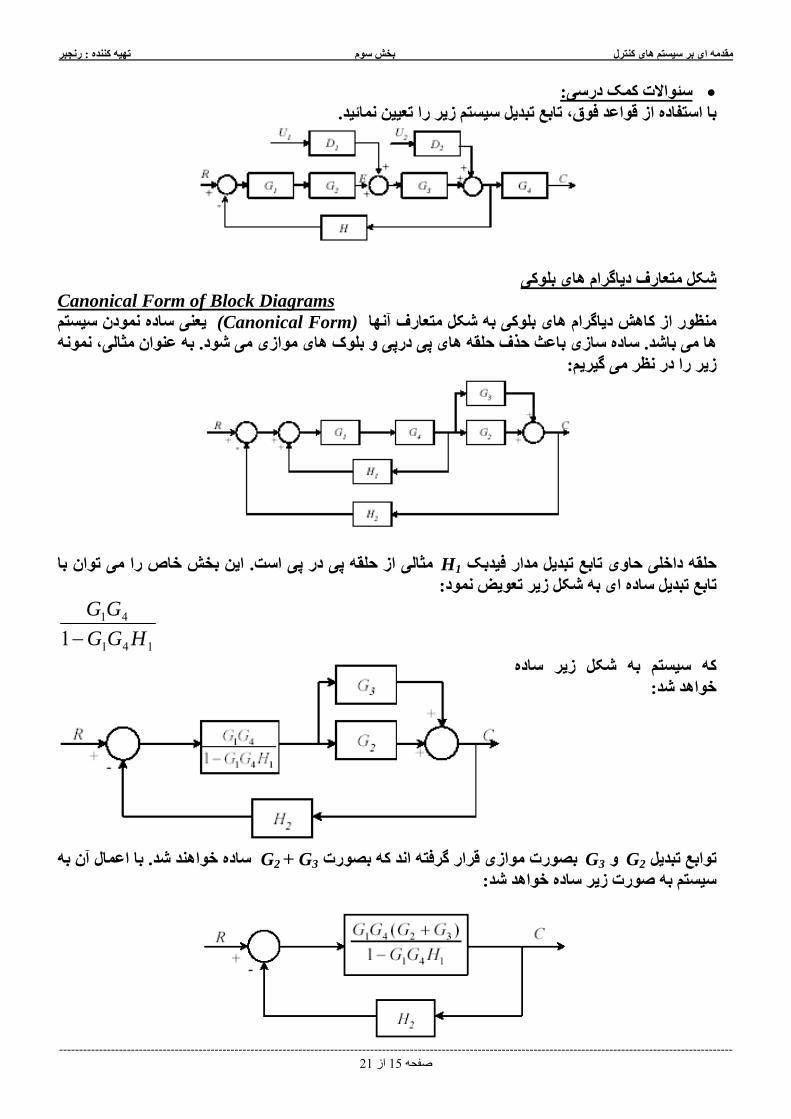
:سئواالت کمک درسی • .با استفاده از قواعد فوق، تابع تبديل سيستم زير را تعيين نمائيد
شکل متعارف دياگرام های بلوکیCanonical Form of Block Diagrams
يعنی ساده نمودن سيستم (Canonical Form)منظور از کاهش دياگرام های بلوکی به شکل متعارف آنها به عنوان مثالی، نمونه . اده سازی باعث حذف حلقه های پی درپی و بلوک های موازی می شودس. ها می باشد
:زير را در نظر می گيريم
اين بخش خاص را می توان با . مثالی از حلقه پی در پی است H1حلقه داخلی حاوی تابع تبديل مدار فيدبک :تابع تبديل ساده ای به شکل زير تعويض نمود
141
41
1 HGGGG
−
که سيستم به شکل زير ساده :خواهد شد
با اعمال آن به . ساده خواهند شد G2 + G3بصورت موازی قرار گرفته اند که بصورت G3و G2توابع تبديل :سيستم به صورت زير ساده خواهد شد

مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 16صفحه
که دياگرام بلوکی سيستم به شکل متعارف يا .رآمده استد (Canonical Form)رسمی
سئواالت درسی1 .CLTF سيستم زير را تعيين نمائيد:
: تابع تبديل سيستم را چنانچه داشته باشيم
1,1
5,13
121 =
+=
+= H
SG
SG تعيين نمائيد.
2 .CLTF سيستم زير را تعيين نمائيد:
:آن را تعيين نمائيد CLTFه و درآورد (Canonical)دياگرام بلوکی سيستم زير را به شکل متعارف آن . 3
:نحوه ترسيم دياگرام بلوکیوکی رياضی حاکم بر هر زير سيستم، پس از استخراج معادالت ال پيوست دياگرام بل ه در مث ل ترسيم است ک قاب
.نحوه ترسيم ارائه شده است

مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 17صفحه
:مدلسازی در فضای حالتاد ه توسط مع ائی است ک ه حالت سيستم مجموعه متغيره وط می شوند ک ه يکديگر مرب الت ديناميک سيستم ب
ده سيستم و پاسخ خروجی آن را مشخص می ت آين ع ورودی حال راه تواب ا بهم ن متغيره شناخت و بررسی اي .نمايد
ا مجموعه ای از متغيرهای حالت )برای يک سيستم ديناميک حالت سيستم ب ) ( ) ( )[ ]txtxtx n,,, تعريف 21 . می شود
ای حال ائی متغيره ت آن دسته از متغيرهرط ا ش تم ب ده سيس ار آين ه رفت تند ک هسيگنالهای ی و س ت فعل ودن حال وم ب معل
د ی نماين ين م رای . ورودی را تعي با ی ه ا و خروج ر، ورودی ه تم زي سيس
.معلوم می باشند)مجموعه ای از متغيرهای حالت )nxxx ,,, ا اطالع از م 21 ا سيستم، مجموعه ای است که ب ه آنه ادير اولي ق
ی )يعن ) ( ) ( )[ ]txtxtx n,,, يگنالهای ورودی در 21 تم و t≤0و س ی سيس ی آت ين خروج رای تعي بر شماتيک .متغيرهای حالت کفايت می نمايد شکل زي
.سيستم ديناميک معادالت حالت را نشان می دهدک ده ي خ آين ده پاس يف کنن ت توص ای حال متغيره
باشند که در آن حاالت فعلی، ورودی های سيستم می .و معادالت ديناميک سيستم معلوم می باشند
ال ال -1مث ن مث اده در اي ه مس وم مجموع فهتم ا سيس ک ب تم دينامي ک سيس ت ي ای حال متغيره
. دمپر، فنر و ضربه گير تشريح شده است :معادله ديفرانسيل مّعرف ديناميک سيستم عبارتست از
(*))t(ukydtdyb
dtydM 2
2
=++
)مجموعه متغيرهای حالت را بصورت )21, xx تعريف می کنيم که:
( ) ( ) ( ) ( )dt
tdytx,tytx 21 ==
: را بر حسب متغيرهای حالت می نويسيم *بنابراين معادله
)t(ukxbxdt
dxM 122 =++
:ننده سيستم عبارتند ازکه مجموعه معادالت ديفرانسيل توصيف ک
uM1kx
Mkx
Mb
dtdx
xdt
dx
122
21
+−−=
=
سيگنالهای ورودیu1(t)
u2(t)
سيگنالهای خروجیy1(t)
y2(t)
سيستم
u(t) ورودی
y(t) خروجی
مقادير اوليه x(0)
حالت سيستم ديناميکx(t)

مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 18صفحه
:سيستم مکانيکی سيستم دو جرمی با دمپرو فنر را در نظر می گيريم -2مثال :و اعمال قانون دوم نيوتن خواهيم داشت M2و M1از دياگرام جسم آزاد جرمهای
( )tfKxdt
xdMKx
0KxKxdtdxD
dtxdM
222
2
21
211
21
2
1
=++−
=−++
: مي گيريم
dtdv
dtxd,
dtdv
dtxd 2
22
21
21
2
==
2211و ,,, vxvx را به عنوان متغيرهای حالت انتخاب می نمائيم که در اينصورت:
( )tfM1x
MKx
MK
dtdv
vdt
dx
xMKv
MDx
MK
dtdv
vdtdx
12
21
2
2
22
21
11
11
1
11
+−+=
+=
+−−=
+=
نمايش ماتريسی معادالت حالت
mnm11nnnn22n11nn
mm2121nn22221212
mm1111nn12121111
ububxaxaxax
ububxaxaxaxububxaxaxax
++++++=
++++++=++++++=
dtdxx: هک :نمايش ماتريسی معادالت فوق بصورت زير می باشد. است =
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
n
1
nm
m1
1n
11
n
2
1
nn2n1n
n22221
n11211
n
2
1
u
u
b
b
b
b
x
xx
aaa
aaaaaa
x
xx
dtd
.بردار حالت ناميده می شود xاتريس ستونی م

مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 19صفحه
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
n
2
1
x
xx
x
BuAxxکه بصورت فشرده .می شود نمايش داده =+DuCxy: معادله خروجی +=
: 1مثال
uM10
xx
Mb
Mk
10
xx
2
1
2
1
⎥⎥⎦
⎤
⎢⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
−−=⎥
⎦
⎤⎢⎣
⎡
BuAxxدر مقايسه با :خواهيم داشت =+
uMx
x
Mb
Mkx
x
=⎥⎥⎦
⎤
⎢⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡=
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
−−=⎥
⎦
⎤⎢⎣
⎡=
u,B,x
Ax
10
10,
2
1
2
1
DuCxyمقايسه با معادله خروجی در : خواهيم داشت =+
[ ]
[ ] 12
1
2
1
xxx
0y
0,xx
,0
=⎥⎦
⎤⎢⎣
⎡=
=⎥⎦
⎤⎢⎣
⎡==
1
Dx1C
:2مثال
( )tf
M1000
vxvx
0MK0
MK
1000
0MK
MD
MK
0010
vxvx
22
2
1
1
22
111
2
2
1
1
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
BuAxxکه در مقايسه با :خواهيم داشت =+

مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 20صفحه
( )tf
M1000
,
vxvx
0MK0
MK
1000
0MK
MD
MK
0010
,
vxvx
22
2
1
1
22
111
2
2
1
1
=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
u,Bx
Ax
به عنوان خروجی مورد نظر باشد، معادله خروجی چه خواهد بود؟ m1جرم چنانچه سرعت : سئوال .روابط معادالت حالت و تابع تبديل در ادامه بخش ارائه می شود: تذکر
:درسیکمک سئواالت
صلب و بدون ABميله . معادالت حرکت برای سيستم زير را بدست آوريد .4 .باشد جرم فرض شده و محدود به حرکت بصورت افقی می
xyyعادله ديفرانسيل غيرخطي م .5dt
yd=+ cos2
2
y = 0با شرط مرزی
ريم x = 0در ور حول نقطه . را در نظر ميگي ا استفاده بسط تيل ه فوق را ب خطي (0,0) = (x,y)معادل .نمائيد
:معادله غيرخطي حرکت پاندول را در نظرمي گيريم .6
.خطي نمائيد θ=0معادله را حول نقطه
0sinlg
dtd
2
2
=⎟⎠⎞
⎜⎝⎛+ θθ
مقدمه ای بر سيستم های کنترل بخش سوم تهيه کننده : رنجبر
------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21از 21صفحه
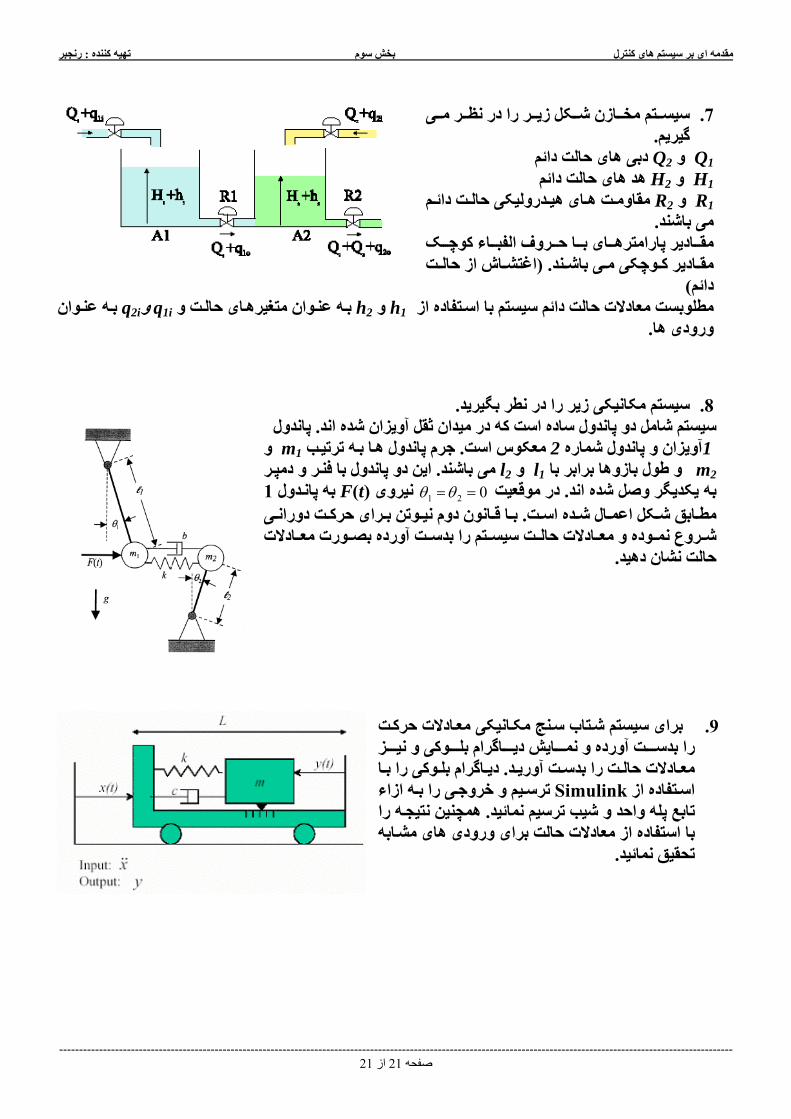
ی .7 ر م ر را در نظ کل زي ازن ش تم مخ سيس
. گيريمQ1 وQ2 دبی های حالت دائم H1 وH2 هد های حالت دائم R1 وR2 م ت دائ دروليکی حال ای هي ت ه مقاوم
.می باشندک اء کوچ روف الفب ا ح ای ب ادير پارامتره مق
ند ی باش وچکی م ادير ک ت . (مق اش از حال اغتش )ائمد
وان متغيرهای حالت و h2و h1 مطلوبست معادالت حالت دائم سيستم با استفاده از ه عن وان q2iو q1iب ه عن ب .ورودی ها
.سيستم مکانيکی زير را در نطر بگيريد .8
پاندول . سيستم شامل دو پاندول ساده است که در ميدان ثقل آويزان شده انده ترتيب . تمعکوس اس 2آويزان و پاندول شماره 1 ا ب و m1جرم پاندول ه
m2 و طول بازوها برابر باl1 وl2 ر . می باشند ر و دمپ اين دو پاندول با فن021در موقعيت . به يکديگر وصل شده اند ==θθ نيرویF(t) دول 1به پان
ده است ال ش کل اعم ابق ش ی . مط ت دوران رای حرک وتن ب انون دوم ني ا ق بود روع نم ت آور ه وش تم را بدس ت سيس ادالت حال ادالت دمع ورت مع ه بص
.حالت نشان دهيد ادالت ح .9 کت ربرای سيستم شتاب سنج مکانيکی مع
ز وکی و ني اگرام بل ايش دي ت آورده و نم را بدسد ت را بدست آوري ادالت حال ا .مع وکی را ب اگرام بل دي
تفاده از ه ازاء Simulinkاس يم و خروجی را ب ترسهمچنين نتيجه را . له واحد و شيب ترسيم نمائيدتابع پ
با استفاده از معادالت حالت برای ورودی های مشابه . تحقيق نمائيد
Related Documents











