ﮐﻨﺘﺮل هﺎﯼ ﺳﻴﺴﺘﻢ اﺗﻮﻣﺎﺗﻴﮏ ﺑﺨﺶ ﻧﻬ ﮐﻨﻨﺪﻩ ﺗﻬﻴﻪ ﻢ: رﻧﺠﺒﺮ_____________________________________________________________________________ ﺻﻔﺤﻪ١ از٣١ ﻓﺮﮐﺎﻧﺴﯽ ﭘﺎﺳﺦ) Response Frequency ( ﺑﺎﺷﺪ ﻣﯽ ﺳﻴﻨﻮﺳﯽ ورودﯼ ﺑﻪ ﮐﻨﺘﺮل ﺳﻴﺴﺘﻢ ﭘﺎﺳﺦ ﺗﺤﻠﻴﻞ روش اﻳﻦ. ﯽѧ ﺧﻄ ﺳﻴﺴﺘﻢ ﻳﮏ ورودﯼ ﮐﻪ هﻨﮕﺎﻣﯽ ﺑﻮد ﺧﻮاهﺪ ﻣﺸﺎﺑﻪ ﻓﺮﮐﺎﻧﺲ ﺑﺎ ﺳﻴﻨﻮﺳﯽ ﻧﻴﺰ ﺁن ﻧﻬﺎﺋﯽ ﭘﺎﺳﺦ ﺑﺎﺷﺪ، ﺳﻴﻨﻮﺳﯽ ﺑﺼﻮرت. ﺳﻴﺴﺘﻢ ﻳﮏ ﺧﺮوﺟﯽ ﭘﺎﺳﺦ زﻳﺮ ﺷﮑﻞ) ﭘﺮ ﺧﻂ( ورودﯼ ﺳﻴﮕﻨﺎل ﺑﺎ را) ﭼﻴﻦ ﺧﻂ( ﻧﻤﺎﻳﺪ ﻣﯽ ﻣﻘﺎﻳﺴﻪ ﺁن. ﮐﺎرﺑﺮدMatlab : %Matlab Script to draw above plot num=3;dnm=[5 1]; G=tf(num,dnm); t=0:0.1:10;u=sin(t); [Y,T]=lsim(G,u,t); plot(T,Y,'-b','LineWidth',2);hold on;plot(t,u,'--r','LineWidth',2) xlabel('time') ylabel('Amplitude') title('First Order TF (G(s)=3/(5s+1) to sin(t) input signal') ● ﯽѧѧ ﻣﻨﺤﻨﻮقѧѧ ﻓﺪﻳﻞѧѧ ﺗﺒﺎﺑﻊѧѧ ﺗﺎѧѧ ﺑﺘﻢѧѧ ﺳﻴﺴﺦѧѧ ﭘﺎﺳ() 1 5 3 + = s s G ﯽѧѧ ﺳﻴﻨﻮﺳ ورودﯼﻪѧѧ ﺑ() () t t u sin = را ﻧﺸﺎن دهﺪ ﻣﯽ. ● ﻪѧ ﮐﺖѧ اﺳ ﺁنﺎﻧﮕﺮѧ ﺑﻴﻮقѧ ﻓ ﺷﮑﻞ درﺦѧ ﭘﺎﺳﺪارﯼѧ ﻣﻘﺘﻢѧ ﺳﻴﺴ ﭘѧ ﺴ ﻔﺎزﯼﻮدѧ ﺷﯽѧ ﻣﺎدѧ اﻳﺠ. ﻦѧ اﻳﻞѧ ﻋﻤﺎمѧ ﻧﻪѧ ﺑ ﻓﺎز اﻧﺘﻘﺎل(phase shift) ﻧﻴﺰ ﺷﻮد ﻣﯽ ﻧﺎﻣﻴﺪﻩ.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ١صفحه
)Response Frequency( پاسخ فرکانسی هنگامی که ورودی يک سيستم خطی . اين روش تحليل پاسخ سيستم کنترل به ورودی سينوسی می باشد
. بصورت سينوسی باشد، پاسخ نهائی آن نيز سينوسی با فرکانس مشابه خواهد بود . آن مقايسه می نمايد) خط چين(را با سيگنال ورودی ) خط پر(شکل زير پاسخ خروجی يک سيستم
:Matlabکاربرد %Matlab Script to draw above plot num=3;dnm=[5 1]; G=tf(num,dnm); t=0:0.1:10;u=sin(t); [Y,T]=lsim(G,u,t); plot(T,Y,'-b','LineWidth',2);hold on;plot(t,u,'--r','LineWidth',2) xlabel('time') ylabel('Amplitude') title('First Order TF (G(s)=3/(5s+1) to sin(t) input signal')
ی ● وق منحن ديل ف ابع تب ا ت تم ب خ سيس )پاس )15
3+
=s
sG ی ه ورودی سينوس )ب ) ( )ttu sin= را
. می دهد نشانه ● انگر آن است ک داری پاسخ در شکل فوق بي اد می شود فازیس پ سيستم مق ن . ايج ام عمل اي ه ن ب
. ناميده می شودنيز (phase shift)انتقال فاز

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ٢صفحه
يگنال : فازیيشپ ● ی س خروجه سيگنال وورودی نسبت ب جل
.دافتمی يگنال : فازیس پ ● ی س خروج
ه سيگنال و ورودی نسبت ب جل .افتدمی
ال ● ه و انتق دار دامن ر دو مق ه
دار ر مق ا تغيي تم ب از سيس فد ر خواهن انس ورودی تغيي فرک
. نمود ابع ● ا ت ه ب اگر سيستم عمومی ک
ديل )تب ) ( )( )sPsQsG ايش = نم
ه (داده می شود )ک )sQ و( )sP ر حسب ه ايهای ب د جمل ا )می باشند sچن ، تحت ورودی سينوسی ب .می شود قرار گيرد، نسبت دامنه خروجی حاصل با رابطه زيربيان ϖفرکانس
( ) ( )ωω jGjGofulusAR == mod
)که درآن )ωjG با جايگزينیωj باs در معادله( )sG د شد ال . حاصل خواه دار انتق بطور مشابه مق :فاز با رابطه زير تعريف می شود
( )ωφ jGshiftphase ∠== وم ● ی معل رای ورودی سينوس )ب )θω += tXtx sin)( کل ه ش ی ب ی سينوس خروج
( ) ( )( )ωθωω jGtjGXty ∠++= sin)( خواهد بود .
.را بدست آوريد s/1و انتقال فاز برای سيستم با تابع تبديل ARمقدار :١مثال
( ) 1G ss
=
:جايگزين می نمائيم sرا با jωپارامتر
( ) 1 1 10jG j jj j j
ωωω ω ω ω
= = = −
:، مقادير اندازه و زاويه عبارتند با y = a + j bبرای عدد مختلط با شکل 2 2 1, tan by a b y
a− ⎛ ⎞= + ∠ = ⎜ ⎟⎝ ⎠
:بنابراين
( )
( )1 1
1
tan 90 tan
AR G j
or
ωω
φ φ− −
= =
= −∞ = − = − ∞
0 2 4 6 8 10
1
0
1
x t( )
y t( )
z t( )
t
x t( ) sin t( ):= y t( ) sin tπ
3+⎛⎜
⎝⎞⎟⎠
:= z t( ) sin tπ
3−⎛⎜
⎝⎞⎟⎠
:=

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ٣صفحه
ه ازاء ورودی :٢مثال ديل را ب ابع تب ا ت ه سيستم ب از و نسبت دامن )انتقال ف )603sin2)( += ttR .تعيين نمائيد
( )1
4+
=ω
ωj
jG
−1jωبا ضرب صورت و مخرج کسر در + :
( )
( )
( )
( ) ( )
( ) ( ) ( ) ( )( )
2 2 2
2 2
2 2 2
21 1
2
1
2
4 4 4 41 1 1
4 4 41 1 1
41tan tan4
13
4 4 1.3 & tan 3 71.57103 1
sin 2 1.3 sin 3 60 71.57
2.6sin 3 11.57 2.6si
jG j j
G j
G j
Y a G j t Y t
Y t
ω ωωω ω ω
ωωω ω ωω
ωφ ω
ωω
ω φ
ω ω ϑ φ
− −
−
− += = −
+ + +
⎛ ⎞ ⎛ ⎞= + =⎜ ⎟ ⎜ ⎟+ +⎝ ⎠ ⎝ ⎠ +⎛ ⎞−⎜ ⎟+= = −⎜ ⎟⎜ ⎟
+⎝ ⎠=
= = ≈ = − = −+
= + + → = + −
= − ≈ ( )n 3 12t −
Tutorial Question سئواالت درسیتالف .١ ه و اخ ال(نسبت دامن ه در معرض ورودی ) انتق ر چنانچ ديل زي ابع تب ا ت تم ب رای سيس از را ب ف
و انتقال فاز با فرض اينکه مقدار ARمقدار . قرار گرفته است را تعيين نمائيد ϖسينوسی با فرکانس .باشد را بدست آوريد rad / s 10فرکانس سيگنال برابر
( )1
3+
=s
sG
General Frequency Transfer Functionروابط کلی توابع تبديل فرکانسیRelations
ر ابق زي ا مط ه ايه بت حاصلضرب چندجمل ی بصورت نس ت کل وان در حال ی ت ديل فرکانسی را م ابع تب ت :نوشت
( ) ( )( )
( ) ( ) ( )
( )ω
ωω
ωωζωω
ωωω
jGK
jjTjj
TjTjKjG
m
nna
m
rm
′=
⎥⎦
⎤⎢⎣
⎡+++
++=
22
21
1211
11

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ۴صفحه
ا . مقدار بهره ثابت می باشد mKکه لگاريتم تابع تبديل مقداری مختلط است که بخش حقيقی آن متناسب ب .لگاريتم اندازه و بخش موهومی متناسب با زاويه است
:رابطه اندازه •( )
( ) ( ) −⎥⎦
⎤⎢⎣
⎡++−+−
−+++++=
22
21
1211
)1()1(
ωω
ωωζω
ωωωω
jjLmTjLm
jmLmTjrLmTjLmLmKjLmG
nna
m
:رابطه زاويه •( )
( ) ( ) −⎥⎦
⎤⎢⎣
⎡++∠−+∠−
∠−++∠++∠+∠=∠
22
21
1211
)1()1(
ωω
ωωζω
ωωωω
jjTj
jmTjrTjKjG
nna
m
:رابطه زاويه را می توان بصورت زير نوشت( )
−−
−−
−+++∠=∠
−−
−−
2211
21
11
12tantan
90tantan
n
na
m
T
mTrTKjG
ωωωζω
ωωω
.می باشد 180يا 0به ترتيب آنمقدار زاويه مقداری ثابت ولی مثبت يا منفی است لذا Kmبهره ● . می باشند ωهر دو رابطه توابعی از •انس منحنی های منحنی های لگاريتم دامنه برحسب لگاريتم فرکانس و • ر حسب لگاريتم فرک ه ب زاوي
.بود ناميده می شوندر • ا متغي ه ب ر حسب زاوي ه ب اين دو منحنی را می توان با يکديگر ادغام نمود که منحنی لگاريتم دامن
. ناميده می شود منحنی نيکولزفرکانس حاصل خواهد شد که . ناميده می شود نحنی نايکوئيستمکه زاويه با متغير فرکانس –همچنين منحنی قطبی اندازه •
:برخی از تعاريف پايه لگاريتمی عبارتند ازده "log"عبارت مخفف . لگاريتم عدد مختلط عددی مختلط است (Logarithm): لگاريتم ● نشان دهن
.می باشد ١٠لگاريتم در مبنای
( ) ( ) ( ) ( )( )( ) ( )
log log log
log 0.434
j jG j e G j e
G j j
φ ω φ ωω ω
ω φ ω
⎡ ⎤ ⎡ ⎤= +⎣ ⎦⎣ ⎦⎡ ⎤= +⎣ ⎦
ا ● ومی متناسب ب دازه و قسمت موه اريتم ان ر لگ ی براب )قسمت حقيق )ωφ434.0 ه از . است در ادام . صرفنظر شده است 0.434ضريب
ل : (Decibel)دسی بل ● در سيستم مدار بسته، واحد مورد استفاده برای لگاريتم نسبت دامنه، دسی ب(decibel dB) ت ا . اس ی الزام ای ورودی و خروج ه متغيره ت ک ی اس م " گفتن ه ه ت ک الزم نيس . ديمانسيون باشند
ديل : (Log magnitude)دامنه لگاريتمی ابع تب ه ت )لگاريتم دامن )ωjG ان ل بي ر حسب دسی ب ه ب ک . نشان داده می شود که تابعی از فرکانس است Lmشده و با
( ) ( ) dBjGjLmG ωω log20=

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ۵صفحه
د ● او و دی ک دوده : (Octave and decade)اکت ان مح رای بي د ب او و دی ک د اکت (band)دو واح . فرکانس يا نسبت فرکانسی استفاده می شود
د فرکانسی از ● او بان ا 1fيک اکت ه 2fت 2است ک1
2 =ff
انس از . است د فرک ابراين بان ا 1Hzبن ت
2Hz 17.4همچنين پهنای باند فرکانس از . برابر يک اکتاو در پهنای باند استHz 34.8تا Hz ز ني . برابر يک اکتاو است
انس مورد نظر ١الزم به تذکر است که ● د فرک ه بان وده و بستگی ب ابتی نب اکتاو پهنای باند فرکانسی ث : برابر است با 2fتا 1fتعداد اکتاو در محدوده فرکانسی بين . دارد
( ) octavesffff
1
212 log32.32log
log=
زايش ● د ١اف ا 1fاز (decade 1)دی ک ه 2fت 10هنگامی حاصل می شود ک1
2 =ff
ذا . باشد ل
داد . می باشد 1decadeبرابر 25Hzتا 2.5Hzيا از 10Hzتا ١باند فرکانسی از ذا تع decadeل
decadeبرابر با 2fتا 1fازff
1
2log می باشد .
Number Decibels Number Decibels0.01 -40 2.0 6 0.10 -20 10.0 20 0.50 -6 100.0 40 1.00 0 200.0 46
.افزايش می يابد dB 6دسيبل آن مقداردو برابر شدن عدد : ١خاصيت .بل افزايش می يابددسی ٢٠، مقدار دسيبل آن ١٠با افزايش عدد با مضرب : ٢خاصيت
Bode Diagrams دياگرام بود
يگنال ● رل ) سينوسی(س ای کنت تم ه ديل سيس ابع تب ی ت يگنال سينوسی ورودی را خروج حاصل از س :با دو نمودار مجزا نشان داد که اين دو نمودار عبارتند ازمی توان
o برحسب فرکانس) به دسی بل(نمودار تغييرات دامنه o بر حسب فرکانس) درجهبه (زاويه فاز
.که هر دو منحنی بصورت منحنی نيم لگاريتم برحسب لگاريتم فرکانس ترسيم می شوند)(بيان لگاريتم دامنه ● ωjG بصورت)(log20 10 ωjG و واحد آن دسی بلdB است . از يک سيستم ● ال ف ه و انتق رات نسبت دامن ايش چگونگی تغيي رای نم ود روشی گرافيکی ب دياگرام ب
. بخصوص با تغيير فرکانس سيگنال سينوسی ورودی می باشد
)سيستم انتگرال گيربا تابع تبديل : مثال )s
sG 1 :را در نظر می گيريم =
:بيان شده باال عبارتند ازنسبت دامنه و انتقال فاز بنابر مطالب ●
90,1−== φ
ωAR
:فرکانس را نشان می دهدجدول زير مقادير فوق به ازاء تغييرات ●

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ۶صفحه
ω AR 20log(AR) φ 0.01 100 40 dB -90o 0.1 10 20 dB -90o 1.0 1 0 dB -90o 10 0.1 -20 dB -90o 100 0.01 -40 dB -90o
ود ● ر دو منحنی است . اين مقادير را می توان ترسيم نم ود مشتمل ب اگرام ب رای : دي ARمنحنی اول ب
ب ( ر حس ی ) dBب و دوماز می باشد . برای انتقال ف
اس ی در مقي ر دو منحن همی نيم لگاريتمی ترسيم
وند اگرام. ش رای دي ود ب برو اال بصورت روب ال ب مث
:خواهد بود
: مزيت اصلی دياگرام بود .ضرب دامنه ها به جمع تبديل می شوند ●ی ● روش ساده ای برای رسم تقريبی منحنی های لگاريتم دامنه وجود دارد که می توان اطالعات تقريب
.مناسبی از سيستم بدست آورداز شده و اطالع ● ات خوبی به عالوه در فرکانسهای پائين به علت استفاده از لگاريتم فرکانس منحنی ب
.از سيستم نمايان می شود .با روشن بودن منحنی پاسخ فرکانسی، می توان تابع تبديل سيستم را تعيين نمود ●
Drawing the Bode Plotsترسيم دياگرام بود . خصوصيات منحنی بود بيان گرديد ● . از کامپيوتر استفاده می شود" برای رسم منحنی بود معموال ● . ارائه گرديد" شکل عمومی تابع تبديل فرکانسی قبال ● :صورت و مخرج اين توابع دارای چهار فاکتور زير می باشند" معموال ●

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ٧صفحه
( )( )
( )m
nn
m
mm
jj
j
j
K
±
±
±
⎥⎦
⎤⎢⎣
⎡++
+
22
121
1
ωω
ωωζ
ω
ω
انس رسم شده و " معموال ● ر حسب فرک ادير ب با استفاده از خاصيت لگاريتم و در رابطه اندازه اين مق .شوندسپس اثرات آنها با يکديگر جمع می
:mKفاکتور بهره ر صفر درجه . بهره خط راستی با شيب صفر به اندازه زير است Lmدياگرام ● ه آن براب اگرام زاوي دي
.است
deg00tan
log20
1 ==∠
=
−
mm
mm
KK
dBKLmK
)فاکتور ) mj ±ω: دازه ● اگرام ان )دي ) mj ±ω يب ا ش فر و ب octavedBmاز ص ا 6±/ decadedBmي /20±
. می شود شروع .درجه است ±90mدياگرام زاويه برابر ●
( ) ( )
( ) 900
tan
log20log20
1 mmj
mjjLm
m
mm
±=±=∠
±==
−±
±±
ωω
ωωω
)فاکتور ) mTj ±+ ω1 : Tcاين فاکتور دارای فرکانس شکست در ● 1=ω است . انس « ● هفرک ا گوش د را : شکست ي ی يابن ه شکست م اريتم دامن ای لگ ب ه ه در آن مجان فرکانسی ک
».گوشه می نامند شکست يافرکانس دازه از صفر شروع می شود ● ا شيب . منحنی لگا ريتم ان انس شکست دارای مجانب ب منحنی در فرک
octavedBm decadedBmيا 6±/ . می باشد 20±/ . تغيير می نمايد ±90mنی زاويه بين صفر تامنح ●

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ٨صفحه
( ) ( ) [ ]( ) TmTj
TmTjTjLmm
mm
ωω
ωωω1
21
22
tan1
1log201log201−±
±±
±=+∠
+±=+=+
)مقايسه منحنی بود دو تابع تبديل : مثال )1
11 +
=s
sG و( )( )22 1
1+
=s
sG
):فاکتور مرتبه دو )m
nn
jj±
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+ 2
2121 ωω
ωωζ
cاين فاکتور دارای فرکانس شکست در ● nω ω= است . دازه از صفر شروع می شود ● ا شيب . منحنی لگا ريتم ان انس شکست دارای مجانب ب منحنی در فرک
octavedBm decadedBmيا 12±/ . می باشد 40±/
. تغيير می نمايد ±180mزاويه بين صفر تامنحنی ●
مجانب decaded /20 B−
مجانب decaded /40 B−
فرکانس شکست

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ٩صفحه
( ) ( )
( )⎟⎟⎠
⎞⎜⎜⎝
⎛−
⎟⎟⎠
⎞⎜⎜⎝
⎛
±=⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+∠
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛−±=
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+±=⎥
⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
−
±
±
2
212
2
21
2
2
2
22
22
1
2
tan121
21log20
121log20121
n
n
m
nn
nn
nn
m
nn
mjj
m
jjmjjLm
ωω
ωζ
ωω
ωωζ
ωζ
ωω
ωω
ωωζω
ωω
ωζ
)برای رسم دياگرام باال( :Matlabکاربرد ●for i=0.1:0.1:1; num=1;dnm=[1 i 1];
ω15 nω 5 nω
nω

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ١٠صفحه
bode(num,dnm);hold on end
m=2با نمای منفی و ٢دياگرام بود برای سيستم مرتبه : مثال
( ) ( )2
22
121−
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+= ω
ωω
ωζω jjjG
nn
٢عامل رسته دامنه یمجانب هاتعيين nωωدر ٢فرکانس گوشه برای عامل مرتبه • :چون. می باشد = :از رابطه دامنه داريم ●
2 22
22
120log 20log 1 2
1 2n n
n n
GM
j j
ω ωζω ωω ωζ
ω ω
⎛ ⎞ ⎛ ⎞= = − − +⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠⎛ ⎞ ⎛ ⎞+ +⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
nωωمالحظه می شود که اگر ● :در اينصورت >>
2
120log 20log(1) 0
1 2n n
GM
j jω ωζω ω
= ≈ =⎛ ⎞ ⎛ ⎞
+ +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
rω
rM
nω

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ١١صفحه
nωωو چنانچه ● :در اينصورت <<
⎟⎟⎠
⎞⎜⎜⎝
⎛−=⎟⎟
⎠
⎞⎜⎜⎝
⎛−=
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
=n
2n
2
2
nn
log40log20
jj21
1log20GMωω
ωω
ωω
ωωζ
nωωاگر بطور مثال ● :شود خواهيم داشت =10
decdBGM
n
n
n
40)10log(4010log40log40 −=−=⎟⎟⎠
⎞⎜⎜⎝
⎛−=⎟⎟
⎠
⎞⎜⎜⎝
⎛−=
ωω
ωω
ه برای عا • انس گوشه ٢مل مرتب د فرک )(باي nω ی سيستم بدست آورده و ζ)(و ضريب ميرائ .منحنی را ترسيم نمائيم
)فرکانس تشديد • )rω و قله تشديد( )rM: :عبارتست از ٢مالحظه شد که دامنه عامل رسته
22
2
22
21
1)(
21
1)(
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛−
=→
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
=
nnnn
jG
jj
jG
ωωζ
ωω
ω
ωω
ωωζ
ω
)(ماکزيمم مقدار ωjG در فرکانس تشديد ، تشديد ناميده می شودکه)( rω اتفاق می افتد. :می توان نشان داد که
707.0021 2 ≤≤−= ζζωω nr :تشديد عبارتست از) قله(و دامنه
2121)()(
ζζωω ωω −
=== = r
jGjGM Maxr
rM=1:خواهيم داشت ζ<707.0به ازای :عبارتست ازهمچنين زاويه فاز در فرکانس تشديد
ζζ
ωω
ωωζ
ωφ
ζωω
ωω
21
21
21 21tan
1
2tan)(
2
−−=
⎟⎟⎠
⎞⎜⎜⎝
⎛−
−=∠= −
−=
−=
n
r
n
nr jG
rM برای سنجش پايداری نسبی سيستم مدار بسته استمعيار مناسبی .
rM است فراجهش بزرگ در پاسخ گذرای سيستمبزرگ بيانگر .
رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ١٢صفحه
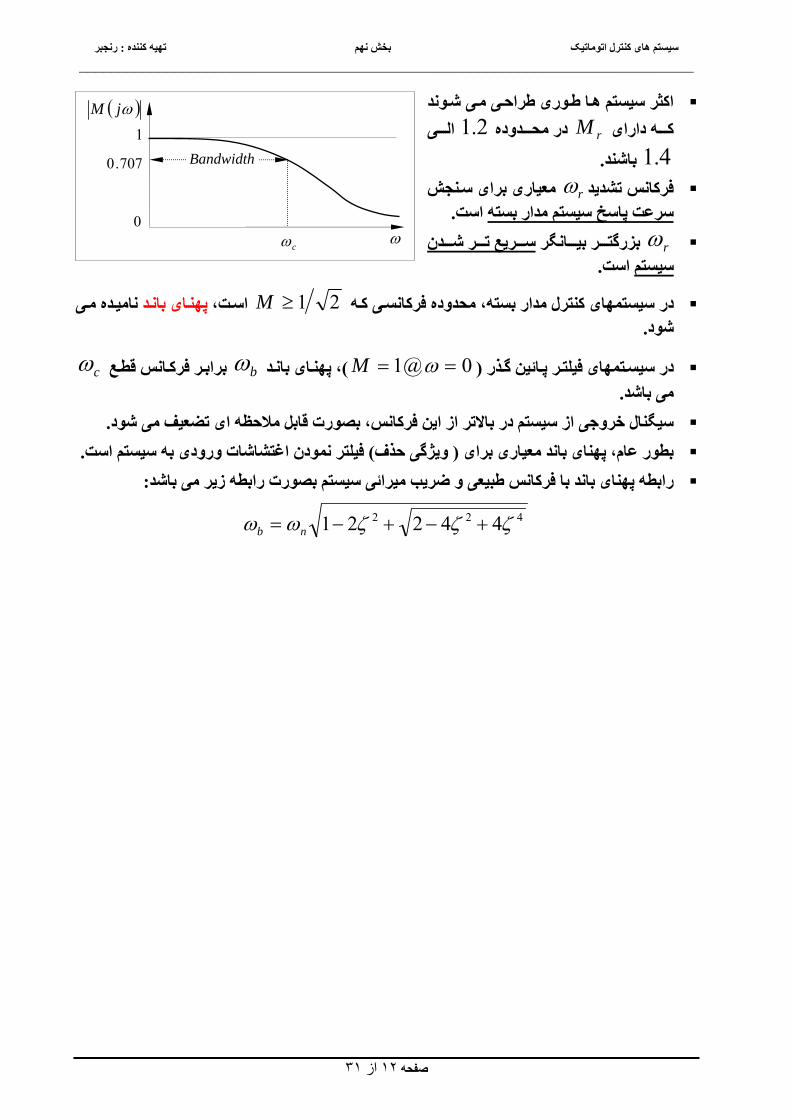
ا طوری طراحی می شوند اکثر سيستم هه دارای دوده rMک ی 2.1در مح ال
.باشند 4.1معياری برای سنجش rωفرکانس تشديد
.است سيستم مدار بسته سرعت پاسخ rω انگر ر بي دن بزرگت ر ش ريع ت س
. است سيستم
ه د است، M≤21در سيستمهای کنترل مدار بسته، محدوده فرکانسی ک ای بان ده پهن می نامي .شود
ذر هایدر سيستم ائين گ ر پ 1@0( فيلت == ωM( د ای بان انس قطع bω، پهن ر فرک cωبراب .می باشد
. رت قابل مالحظه ای تضعيف می شودوسيگنال خروجی از سيستم در باالتر از اين فرکانس، بص .فيلتر نمودن اغتشاشات ورودی به سيستم است) ويژگی حذف( بطور عام، پهنای باند معياری برای :ای باند با فرکانس طبيعی و ضريب ميرائی سيستم بصورت رابطه زير می باشدنرابطه په
422 44221 ζζζωω +−+−= nb
( )ωjM1
0
707.0
cω ω
Bandwidth
رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ١٣صفحه
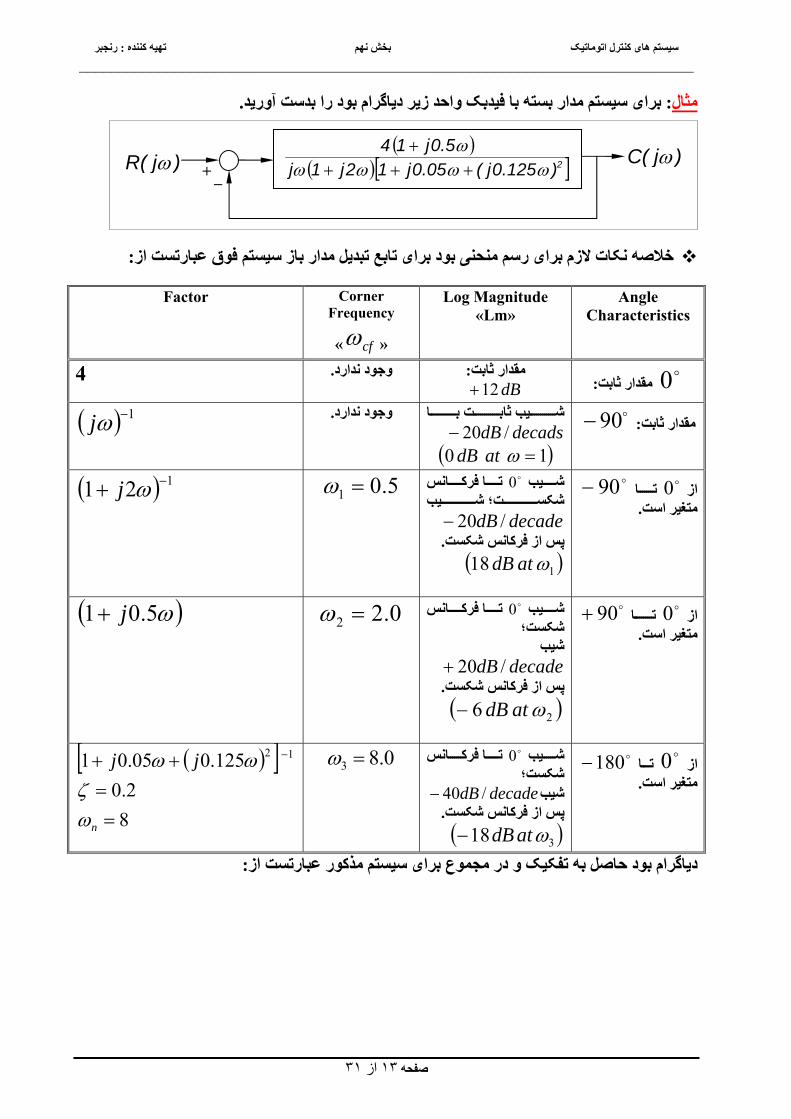
.برای سيستم مدار بسته با فيدبک واحد زير دياگرام بود را بدست آوريد: مثال
:ستم فوق عبارتست ازيخالصه نکات الزم برای رسم منحنی بود برای تابع تبديل مدار باز س
Angle Characteristics
Log Magnitude »Lm«
Corner Frequency
»cfω«
Factor
:مقدار ثابت :مقدار ثابت
dB12+ 4 .وجود ندارد
−90: ثابتمقدار
ا ت ب يب ثاب ش ( )10 =ωatdB
.وجود ندارد
ا از −90ت .متغير است
يب انس 0ش ا فرک تيب ت؛ ش شکس
decadedB /20− .از فرکانس شکست پس
( )118 ωatdB
5.01 =ω ( ) 121 −+ ωj
ا از ت .متغير است
يب انس 0ش ا فرک ت شکست؛
شيبdecadedB /20+
.از فرکانس شکست پس( )26 ωatdB−
0.22 =ω ( )ω5.01 j+
ا 0از −180ت .متغير است
يب انس 0ش ا فرک ت شکست؛
decadedBشيب /40− .از فرکانس شکست پس
( )318 ωatdB−
( )[ ]
82.0
125.005.01 12
==
++ −
n
jj
ωζ
ωω
:دياگرام بود حاصل به تفکيک و در مجموع برای سيستم مذکور عبارتست از
0
decadsdB /20−( ) 1−ωj
0
090+
0.83 =ω
_ + )j(R ω )j(C ω ( )
( )[ ]2)125.0j(05.0j12j1j5.0j14
ωωωωω+++
+

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ١۴صفحه
-30
-20
-10
0
10
20
30
40M
agni
tude
(dB)
10-1 100 101 102-91
-90.5
-90
-89.5
-89
Phas
e (d
eg)
4/jω
Frequency (rad/sec)
-50
-40
-30
-20
-10
0
Mag
nitu
de (d
B)
10-2 10-1 100 101 102-90
-45
0
Phas
e (d
eg)
1/(2jω+1)
Frequency (rad/sec)
12 dB
0.5cω =5cω 5 cω

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ١۵صفحه
0
5
10
15
20
25
30
35M
agni
tude
(dB)
10-1 100 101 1020
45
90
Phas
e (d
eg)
0.5jω+1
Frequency (rad/sec)
-50
-40
-30
-20
-10
0
10
Mag
nitu
de (d
B)
10-1 100 101 102-180
-135
-90
-45
0
Phas
e (d
eg)
1/((0.125jω)2+0.05jω+1)
Frequency (rad/sec)
5cω 2cω = 5 cω
8cω = 10 cω 0.1 cω

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ١۶صفحه
-40
-30
-20
-10
0
10
20
30
40M
agni
tude
(dB)
10-1 100 101 102-300
-200
-100
0
100
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
4jω
ω211j+
decadsdB /60−
( )2125.005.011
ωω jj ++
( )ω5.01 j+
decadsdB /40−
decadsdB /20−
( )ω5.01 j+
( )2125.005.011
ωω jj ++
ω211j+
4jω

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ١٧صفحه

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ١٨صفحه
:مثالN تابع تبديل سيستم مربوطه عبارتست از. سيستم مرتبه اول سری حلقه باز را در نظر می گيريم:
( ) ( ) ( ) ( )
( )111 2
2
1
1
21
+++=
=
sTK
sTK
sTKsG
sGsGsGsG
N
N
N
( )( ) ( ) ( )[ ]( ) ( )
( )
( )1
log20
log20log20
log20
log20
1
11
21
21
+=
++
+=
×××=
=
ωω
ω
ωω
ωωω
ω
jTKjG
jG
jGjGGain
jGjGjGGain
jGGain
N
dB
NdB
dB
:ولی
( ) ( )( )
( )N
N
N
dB
TTTjG
TK
TK
TKGain
TK
T
TKjG
TTjKK
jTjT
jTK
jTK
ωωωφφφφωφ
ωω
ω
ωω
ωω
ωω
ωω
ωω
tantantan
1log20
1log20
1log20
11
1
111
11
21
21
221
222
1
221
1
221
1222
1
221
21
1
221
111
1
1
1
1
1
1
−−−−=+++=∠=
⎥⎥⎦
⎤
⎢⎢⎣
⎡
+++
⎥⎥⎦
⎤
⎢⎢⎣
⎡
+
+⎥⎥⎦
⎤
⎢⎢⎣
⎡
+=
+=
+
+=
+−
=+−+−
+=
+
.و زاويه فاز سيستم با تابع تبديل زير را می توان به روش بيان شده بدست آورد ARدر حالت کلی ●
( ) ( )( ) ( )( )( ) ( )sTsTsTs
sTsTsTKsGnba
mOPENLOOP +++
+++=
111111 21

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ١٩صفحه
nb
a
m
dBOPENLOOP
TjTj
Tjj
TjTj
TjKG
ωω
ωω
ωω
ω
+−−+
−+−−
++++
+++=
1log201log20
1log20log20
1log201log20
1log20log20
2
1
( ) ( ) ( )
( )( ) ( ) ( )
( )( ) ( ) ( )
( )( ) ( )
( )n
ba
m
OPENLOOP
n
ba
m
OPENLOOP
T
TT
T
TTjG
TjTjTjj
TjTjTjKjG
ω
ωω
ω
ωωω
ωωωω
ωωωω
1
11
12
11
1
21
tan
tantan90
tan
tantan0
111
111
−
−−
−
−−
−−
−−−
++++=∠
+∠−−+∠−+∠−∠−
+∠++∠++∠+∠=∠
K مثبت فرض شده است.
)Bode Stability Criteria( معيار پايداری بود پايداری نسبی سيستم برای کنترل . دياگرام بود بخصوص برای تعيين پايداری نسبی سيستم مفيد می باشد
ور انس عب از فرک ه در آن (phase crossover frequency ωco)ف است، φ=−180، فرکانسی که . می شود تعيين ر بهره دامن انس (AR)اگ ن فرک وچکتر از در اي ا ( 1ک )ي )20log 0AR باشد )>
دار است نشان دهنده سيستم 1برابر با ARمقدار . سيستم پايدار است . بی تفاوت يا بصورت بحرانی پاي .در فرکانس عبور موجب افزايش ميزان پايداری نسبی سيستم می شود ARهمچنين کاهش
GaindB>0به معنای آن است که بهره سيستم بزرگتر از يک است يعنی AR >1به ياد داشته باشيد که
Gain and Phase Margins حاشيه فاز و بهرهياح اری هش ره معي از و به رای ف تم ب ه سيس ايش آنک ا نم دازه ت ه ان تانه چ له از آس داری فاص ناپاي
:اين پارامترها بصورت زير تعريف می شوند. می باشند دارد،
(Gain Margin):حاشيه بهره •ا سيستم (decibel; dB)مقدار بهره به دسی بل د ت دار در آستانه که می تواند افزايش ياب یناپاي
. رديگقرار ان رياضی ا به بي ازبرابر ب دگی ف ه عقب مان دار بهره اضافی 1800-در فرکانسی ک می شود، مق
)اندازه دامنه برابر با يک يا برای آنکهمورد نياز )20log 0AR .گردد = :لذا

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ٢٠صفحه
( )( ) 1
:180
=
≡→=∠
= ncyOverFrequePhaseCrossjG
FrequencyOverCrossPhasejG
OPENLOOP
PCOFo
OPENLOOP
ωωω
ωωω
:نشان دهيم، در اينصورت طبق تعريف عبارتست از GainKاگر بهره سيستم را با
frequencyOverCrossePhase
jGKGain
ωωω =
=)(
1
:و به دسی بل)(log20log20)( PCOFGG jGKdBK ω−==
)Margin Phase(:حاشيه فاز •
دار افی مق از اض دگی ف ره عقب مان ور به انس عب تم در فرک ه سيس داری ک تانه ناپاي را در آس . قرار می دهد
:فرکانس عبور بهره( ) FrequencyOverCrossGainjG GCOFOPENLOOP :1 ωωω ≡→=
:يا
( )( )20log 0 :OPENLOOP GCOFG j Gain Cross Over Frequencyω ω ω= → ≡
:حاشيه فاز عبارتست ازنشان دهيم، طبق تعريف γاگر حاشيه فاز را با
)(180
GCOFOPENLOOP jG ωφφγ
∠=+=
. پايداری سيستم می باشند معياری برای بيان حاشيه فاز و حاشيه بهره مثبتمقادير • . می باشد 0dB، فرکانسی است که در آن حاشيه بهره برابر بهره فرکانس عبور • . می باشد 1800-، فرکانسی است که در آن حاشيه فاز برابرفاز عبور فرکانس •

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ٢١صفحه
ان :مثال ر بي ديل زي ابع تب ا ت ی ب وان بصورت تقريب از را می ت دار ب زل م ور دي ديناميک سرعت يک موت :نمود
( )( )( )1.032 +++=
sssK
G pOPENLOOP
از فوق در فاصله فرکانسی ی 0.01دياگرام بود پاسخ سيستم مدار ب ا فرض 100ال ه را ب ر ثاني ان ب راديد K p = 1اينکه رای . می باشد، ترسيم نمائي ز بهره الزم ب از سيستم و ني ين حاشيه های بهره و ف همچن
.گردد را تعيين نمائيد 300اينکه حاشيه فاز برابر با
22
2
22
2
01.01log20
91log20
41log20log20
01.0log209log20
4log20log20
1.0log203log20
2log20log20
ωω
ω
ωω
ω
ωω
ω
++
++
++=
+−+−
+−=
+−+−
+−=
p
p
p
KG
KG
jj
jKG
1.0tan
3tan
2tan 111 ωωω −−− −−−=∠G
:و فاز بر حسب تغييرات فرکانس را محاسبه می نمائيم ARمقادير AR
ω (rad/sec) 0.01 0.1 1 10 100 20log(Kp) 0 0 0 0 0 20log(1/(4+ω2)½) -6 -6 -7 -20 -40 20log(1/(9+ω2)½) -10 -10 -10 -20 -40 20log(1/(0.01+ω2)½) 20 17 0 -20 -40 Sum (dB) 4 1 -17 -61 -120
Φ ω (rad/sec) 0.01 0.1 1 10 100 tan-1(Kp) 0 0 0 0 0 tan-1(ω/2) 0.005 0.05 0.46 1.4 1.6 tan-1(ω/3) 0.003 0.03 0.32 1.3 1.5 tan-1(ω/0.1) 0.1 0.8 1.5 1.6 1.6 Sum (deg) -6 -50 -129 -241 -267
:شکل خواهد بود مطابقمنحنی بود حاصل

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ٢٢صفحه
. می باشند 1200و حاشيه فاز 30.25dBبا رجوع به منحنی مقدار حاشيه بهره
حاشيه بهره
فازحاشيه

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ٢٣صفحه
ر از براب ه 300برای آنکه حاشيه ف ا φباشد الزم است ک ر ب ا استفاده از . باشد 1500براب بکند، مطابق شکل می قطع ω=5.1در که منحنی را φ=150فاز برای زاويه فازمنحنی
:مقدار بهره برابر است با6.1222log2022 =⇒=⇒−= pp KKAR
Matlabکاربرد :فايل زير قابل محاسبه می باشند mمنحنی ها و مقادير حاشيه بهره و فاز را با
num=1; dnm=conv([1 2],conv([1 3],[1 0.1])) OLOOP=tf(num,dnm); figure bode(OLOOP); grid figure margin(OLOOP); [Gm,Pm,Wcg,Wcp] = margin(OLOOP); Margins = [Gm Wcg Pm Wcp] Gain=20*log10(Gm)
-150
بهره حاشيه درجه٣٠فاز
1.5

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ٢۴صفحه
رابطه بين حاشيه فاز و ضريب ميرائی :را در نظر می گيريمتابع تبديل مدار باز زير مدار بسته با رسته دو سيستم
)1()()(
+=
ssKsHsGτ
τω: در آنکه Kn τζωو = 12 =n
ωjs: برای بررسی پاسخ فرکانس سيستم می گيريم ≡
( ) ( ) ( )n
n
jjjHjG
ζωωωωωω
2
2
+=
ر ه براب gωωدر فرکانس عبور بهره ک يم، = )فرض می کن ) ( ) 1=ωω jHjG می باشد . :بنابراين
( ) ( )2 2
2 2 2
4 2
1 12 4
4 1 2
g
n n
n g g n
g n
j jω ω
ω ωω ω ζω ω ω ζ ω
ω ω ζ ζ
=
= =+ +
= + −
:زاويه فاز در اين فرکانس عبارتست از هک
( )
( )ζ
ζζω
ζωω
ω
2214
tan90
2tan90
241
1
−+−−=∠
−−=∠
−
−
g
n
gg
jG
jG
:و حاشيه فاز سيستم عبارتست از
24
1
241
214
2tan
2214
tan90
ζζ
ζζ
ζζ
−+=Φ
−+−=Φ
−
−
M
M
.که بيانگر رابطه حاشيه فاز سيستم با ضريب ميرائی است
رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ٢۵صفحه
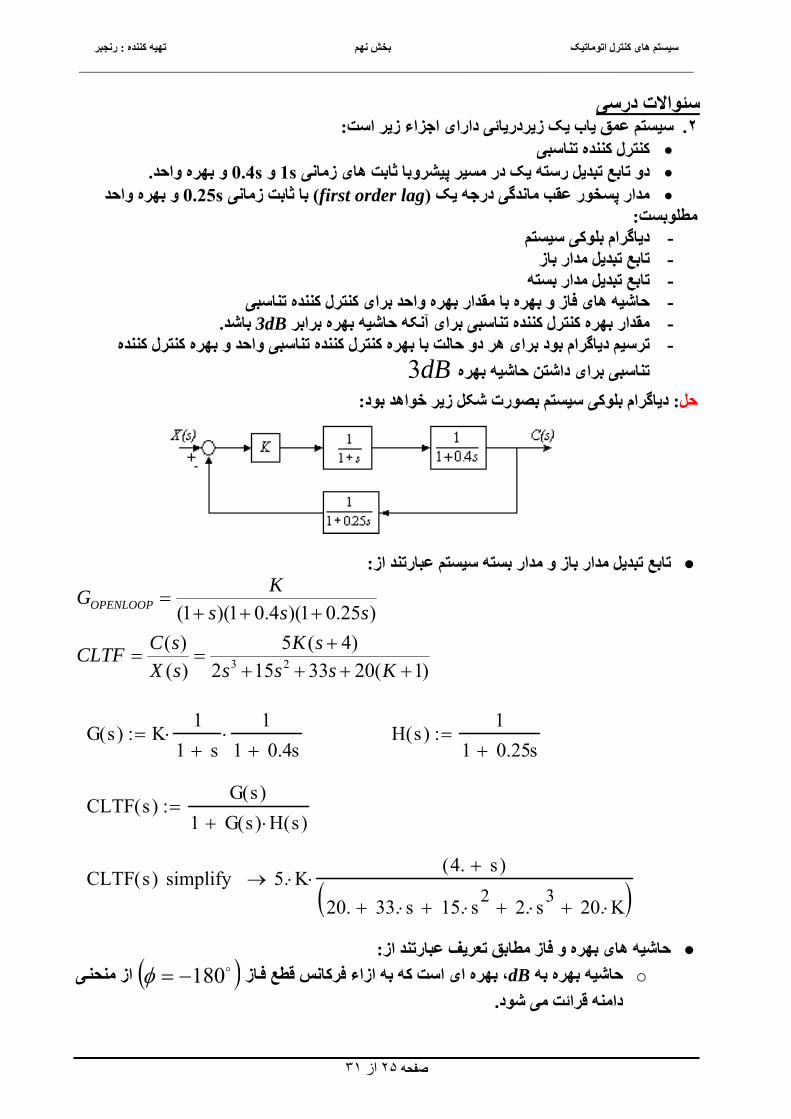
سئواالت درسی :سيستم عمق ياب يک زيردريائی دارای اجزاء زير است .٢
کنترل کننده تناسبی • .و بهره واحد 0.4sو 1sدو تابع تبديل رسته يک در مسير پيشروبا ثابت های زمانی • و بهره واحد 0.25sبا ثابت زمانی (first order lag)مدار پسخور عقب ماندگی درجه يک •
:مطلوبست دياگرام بلوکی سيستم - تابع تبديل مدار باز - تابع تبديل مدار بسته - بهره واحد برای کنترل کننده تناسبی حاشيه های فاز و بهره با مقدار - .باشد 3dBمقدار بهره کنترل کننده تناسبی برای آنکه حاشيه بهره برابر -بهره کنترل کننده و واحد بهره کنترل کننده تناسبیترسيم دياگرام بود برای هر دو حالت با -
dB3برای داشتن حاشيه بهره تناسبی :سيستم بصورت شکل زير خواهد بود دياگرام بلوکی: حل
:ابع تبديل مدار باز و مدار بسته سيستم عبارتند ازت ●
)1(2033152)4(5
)()(
)25.01)(4.01)(1(
23 +++++
==
+++=
KssssK
sXsCCLTF
sssKGOPENLOOP
G s( ) K1
1 s+⋅
11 0.4s+⋅:= H s( )
11 0.25s+
:=
CLTF s( )G s( )
1 G s( ) H s( )⋅+:=
CLTF s( ) simplify 5. K⋅4. s+( )
20. 33. s⋅+ 15. s2⋅+ 2. s3
⋅+ 20. K⋅+( )⋅→
:حاشيه های بهره و فاز مطابق تعريف عبارتند از ●
o حاشيه بهره بهdB از )، بهره ای است که به ازاء فرکانس قطع ف )180−=φ از منحنی .دامنه قرائت می شود

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ٢۶صفحه
o ه، حاشيه فاز ه زاوي أخيری ب ه ت ه )پسفازی الزم ( زاوي د ب ه باي از سيستم در است ک ه ف زاويرار ( اضافه شود −180رسيدن به تا فرکانس قطع بهره داری ق ا سيستم در آستانه ناپاي ت
.)گيرد
o ره يه به ه :حاش ه زاوي ه از رابط ت ک از اس ورد ني از م ه ف ت زاوي انس شکس فرک :محاسبه می نمائيم
( ) ( ) ( ) 18025.0tan4.0tantan 111 −=−−−= −−− ωωωφ
ه از ب ه ف يدن زاوي ا رس انس ت ر فرک ا تغيي ا ب ه ي ود ک به نم از را محاس ع ف انس قط وان فرک ی ت مانس شکست −180 و يا با حل معادله غيرخطی زاويه و بدست آوردن ريشه آن می توان فرک
. فاز را محاسبه نمود
انس قطع حدودا : با تغيير فرکانس) الف ه فرک ر مشاهده می شود ک ر " که مطابق جدول زي برابsec05.4 radcG ≈ω است.
ω φ
1 -80
2 -129
4 -179
4.1 -180.6
4.05 -179.8
:لذا حاشيه بهره عبارتست از ●( ) ( ) ( )
06.21)25.0(1log20)4.0(1log201log20 222
−=
+−+−+−=
GMGM ωωω
:با استفاده از حل معادله) ب : Mathcadکاربرد ●
ω 1:= ... initial guess value
Given
atan ω( )− atan 0.4ω( )− atan 0.25ω( )− π−
ω Find ω( ):= ω 4.062=

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ٢٧صفحه
GainMargin 20− log 1 ω2
+⎛⎝
⎞⎠⋅ 20 log 1 0.42
ω2
+⎛⎝
⎞⎠⋅− 20 log 1 0.252
ω2
+⎛⎝
⎞⎠⋅−:=
GainMargin 21.119−=
از انس قطع :حاشيه ف اال فرک ده ب ان ش ه دو روش بي وان ب ز می ت از ني رای محاسبه حاشيه ف ره را ب به .بدست آوردمحاسبه و مقدار حاشيه فاز را
sec01.0در فرکانسی حدود ) الف rad≈ω ل ه دسی ب می توان مشاهده کرد که مقدار دامنه ب
:لذا. است) 1يا مقدار اندازه در حدود (در حدود صفر ( ) ( ) ( )
1.179180arg
95.0
01.025.0tan01.04.0tan01.0tan 111
=→+=
−=
×−×−−= −−−
PMinMPhase φ
φ
φ
φ atan 0.01( )− atan 0.4 0.01⋅( )− atan 0.25 0.01⋅( )−:= φ180π
⋅ 0.945−=
γ 180 φ180π
⋅+:= γ 179.1=
:از روش محاسباتی) ب
:Mathcadکاربرد ●ω 1:= K 1:=
f ω( ) 20 log K( )⋅ 20 log 1 ω2
+⎛⎝
⎞⎠⋅− 20 log 1 0.42
ω2
⋅+⎛⎝
⎞⎠⋅− 20 log 1 0.252
ω2
⋅+⎛⎝
⎞⎠⋅−:=
ω root f ω( ) ω,( ):= ω 0.012=
3dBحاشيه بهره داشتن مقدار بهره کنترل کننده تناسبی برای محاسبه - :بهره سيستم عبارتست از
( )( )[ ] ( )[ ]22
2
25.01log204.01log20
1log20)log(20
ωω
ω
+−+−
+−= KGM
از سيستم از رابطه بهره سيستم را در dB3برای داشتن حاشيه بهره دار ب ديل م ابع تب ، مقدار بهره ت
:فرکانس عبور فاز محاسبه می نمائيم
( )( )[ ] ( )[ ]
GCOFGCOF
GCOF
KdB
ωω
ω
ωω
ω
22
2
25.01log204.01log20
1log20)log(203
+−+−
+−=−

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ٢٨صفحه
053.810
119.21)log(203
203119.21
=→=
−=−
⎟⎠⎞
⎜⎝⎛ −
KK
KdB
ا - ط مربوطه و ترسيم آنه از از رواب دازه و ف ادير ان دياگرام بود سيستم با تغيير فرکانس و محاسبه مق :در روی منحنی نيم لگاريتم مطابق شکل بدست خواهد آمد
( )( )[ ] ( )[ ]
)25.0(tan)4.0(tan)(tan
25.01log204.01log20
1log20)log(20
111
22
2
ωωω
ωω
ω
−−− −−−=
+−+−
+−=
PM
KGM
1منحنی های بود سيستم با بهره کنترل کننده تناسبی برابر ) الف

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ٢٩صفحه
dB3برای داشتن حاشيه فاز K=05.8منحنی های بود سيستم با بهره کنترل کننده تناسبی ) ب

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ٣٠صفحه
:نمودموقعيت يک بازوی روبات را می توان با استفاده از تابع تبديل زير تعيين .٣
( ) ( )( )212
++=
ssssG
رای سيستم ود ب اگر کنترل کننده تناسبی با بهره واحد نيز در سيستم کنترل بکار رفته باشد، دياگرام ب .راديان برثانيه را رسم نمائيد 10تا 0.1مذکور بين فرکانس های
.بحث کنيدهمچنين مقادير حاشيه فاز و حاشيه بهره را محاسبه و در مورد پايداری سيستم
:تذکر
ود ز ترسيم نم ی ني ن حالت صورت و . همانگونه که بيان شد می توان منحنی بود را بصورت تقريب در ايمخرج تابع تبديل مدار باز سيستم بصورت حاصلضرب عوامل اول نوشته شده و فرکانس گوشه هر عامل
ترسيم و با توجه " عوامل را انفراداسپس در منحنی دامنه فرکانس های گوشه و مجانب . تعيين می گرددی ه را بصورت تقريب ائی دامن به اينکه در منحنی نهائی کليه عوامل با يکديگر جمع می شوند، منحنی نه
همچنين منحنی فاز هر عامل نيز بصورت تقريبی و با توجه به رفتار هر عامل ترسيم و . ترسيم می نمائيمه . ی های تقريبی فازهای عوامل حاصلضرب ترسيم می شود منحنی فاز سيستم نيز از حاصل جمع منحن ب
.مثال زير توجه نمائيد
:برای هريک از توابع تبديل زير -مسئله

رنجبر: م تهيه کننده نهبخش اتوماتيک سيستم های کنترل _____________________________________________________________________________
٣١از ٣١صفحه
)255()30()()
)50)(1()10()()
)5)(2(10)()
2 −++
=
+++
=
++=
sssssGc
ssssGb
ssssGa
i. بيان تحليلی برای توابع اندازه و زاويه فاز بر حسب فرکانس را بدست آوريد. ii. ديل را –بر روی منحنی لگاريتم ع تب يم لگاريتم منحنی مجانب های هر يک از تواب ا ن لگاريتم ي
.رسم نمائيدiii. از روابط تحليلی مقادير دقيق بهره در فرکانس های عبوررا تعيين نمائيد .
Related Documents











