8/2/2019 Thesis Kenji Shimizu
1/143
Application of modal analysis
to strongly stratified lakes
Kenji Shimizu
B. Eng. (Mechanical) Tokyo Institute of Technology, Tokyo, Japan.
M. Eng. (Environmental) Tokyo Institute of Technology, Tokyo, Japan.
This thesis is presented for the degree of Doctor of Philosophyof The University of Western Australia.
April 2008
8/2/2019 Thesis Kenji Shimizu
2/143
8/2/2019 Thesis Kenji Shimizu
3/143
iii
Abstract
Modal analysis for strongly stratified lakes was extended to obtain a better
understanding of the dynamics of the basin-scale motions. By viewing the basin-scale
motions as a superposition of modes, that have distinct periods and three-dimensionalstructures, the method provides a conceptual understanding for the excitation, evolution,
and damping of the basin-scale motions. Once the motion has been decomposed into
modes, their evolution and energetics may be extracted from hydrodynamic simulation
results and field data. The method was applied to Lake Biwa, Japan, and Lake Kinneret,
Israel, and used for a theoretical study.
The real lake applications showed that winds excited basin-scale motions that had a
surface layer velocity structure similar to the wind stress pattern. Three-dimensionalhydrodynamics simulations of Lake Biwa indicated that most of the energy input from
winds was partitioned into the internal waves that decayed within a few days. The gyres,
on the other hand, received much less energy but dominated the dynamics during calm
periods due to their slow damping. Analyses of field data from Lake Kinneret suggested
that the internal waves, excited by the strong winds every afternoon, were damped over
a few days primarily due to bottom friction. Theoretical investigations of damping
mechanisms of internal waves revealed that bottom friction induced a velocity anomalyat the top of the boundary layer that drained energy from the nearly inviscid interior by
a combination of internal wave cancelling and spin-down.
These results indicate that gyres induce long-term horizontal transport near the
surface and internal waves transfer energy from winds to near-bottom mixing. Modal
structure of dominant basin-scale internal waves can induce large heterogeneity of near-
bottom mass transfer processes. The method presented here provides a tool to determine
how basin-scale motions impact on biogeochemical processes in stratified lakes.
8/2/2019 Thesis Kenji Shimizu
4/143
iv
8/2/2019 Thesis Kenji Shimizu
5/143
v
Table of contents
Abstract ............................................................................................................................iii
Table of contents ............................................................................................................... v
List of tables ....................................................................................................................vii
List of figures .................................................................................................................viii
List of symbols ...............................................................................................................xiii
Acknowledgements.......................................................................................................xvii
Preface............................................................................................................................xix
Chapter 1. Introduction ..................................................................................................... 1
1.1 Motivation..........................................................................................................1
1.2 Overview............................................................................................................2
Chapter 2. Horizontal structure and excitation of primary motions in a stronglystratified lakes..........................................................................................................4
2.1 Introduction........................................................................................................4
2.2 Field Data...........................................................................................................8
2.3 Theory of modal analysis .................................................................................10
2.3.1 Basic equations and solutions .........................................................10
2.3.2 Some property of modes .................................................................13
2.3.3 Decoupled dynamic equations of individual modes ....................... 14
2.4 Modal analysis of Lake Biwa........................................................................... 162.4.1 Numerical method........................................................................... 16
2.4.2 Horizontal structure and excitation of internal waves.....................18
2.4.3 Spatial structure and excitation of gyres .........................................20
2.5 Three-dimensional hydrodynamic simulations of Lake Biwa ......................... 23
2.5.1 Hydrodynamic model...................................................................... 23
2.5.2 Preferential excitation of internal waves.........................................23
2.5.3 Excitation of gyres by wind stress curl ...........................................26
2.6 Discussion........................................................................................................27Appendix 2.A -- Self-adjointness of operator K ....................................................... 33
Chapter 3. Energetics and damping of internal waves in a strongly stratified lake....... 37
3.1 Introduction......................................................................................................37
3.2 Theory of modal analysis with linear damping................................................ 41
3.2.1 Shallow water equations and the associated modes ........................ 41
3.2.2 Governing equations of modal amplitude and energy ....................45
3.3 Study site and field data ...................................................................................46
3.3.1 Study site .........................................................................................46
8/2/2019 Thesis Kenji Shimizu
6/143
vi
3.3.2 Field data.........................................................................................46
3.4 Spatial structure of basin-scale internal waves in Lake Kinneret ....................49
3.5 Energetics and damping of internal waves ...................................................... 53
3.5.1 Extraction of internal waves by mode fitting.................................. 53
3.5.2 Energetics of basin-scale internal waves ........................................ 583.5.3 Damping of basin-scale internal waves by bottom friction ............ 60
3.6 Spatial variability of near-bottom transport processes..................................... 61
3.7 Discussion ........................................................................................................ 64
Appendix 3.A -- Derivation of modal equations for a weakly dissipative system....68
Chapter 4. Damping mechanisms of internal waves in a continuously stratifiedrotating basin ......................................................................................................... 71
4.1 Introduction ...................................................................................................... 71
4.2 Governing equations and scaling ..................................................................... 744.3 Ekman normal velocities induced by oscillatory boundary layers .................. 77
4.3.1 Bottom boundary layer.................................................................... 77
4.3.2 Sidewall boundary layer.................................................................. 80
4.3.3 Bottom corner region ...................................................................... 82
4.4 Perturbation analysis of damped internal waves.............................................. 83
4.4.1 Inviscid solutions ............................................................................ 84
4.4.2 Correction to the inviscid basin-scale internal waves due to
boundary layer presence ......................................................................... 874.5 Internal wave cancelling in a flat-bottomed rectangular basin ........................ 90
4.6 Damping of gravity waves in circular basins................................................... 93
4.7 Discussion ...................................................................................................... 101
4.8 Conclusions .................................................................................................... 103
Appendix 4.A -- Orthogonality of modes in a continuously stratified rotatingbasin with arbitrary shape .............................................................................. 104
Appendix 4.B -- Horizontal modes in a flat-bottomed circular basin .................... 108
Appendix 4.C -- Horizontal modes in a flat-bottomed circular basin .................... 110Chapter 5. Conclusions ................................................................................................. 113
5.1 Summary ........................................................................................................ 113
5.2 Recommendations for future work ................................................................ 114
Bibliography.................................................................................................................. 117
8/2/2019 Thesis Kenji Shimizu
7/143
vii
List of tables
Table 2.1. Some characteristics of the internal waves and gyres in Lake Biwa. Some of thetopographic waves and surface waves (seiches) are also included to illustrate thespectrum of the modes. The surface and internal waves are numbered in decreasingorder of their natural periods, while the geostrophic gyres are numbered in the opposite
order. No number is assigned to topographic waves. Abbreviations are HM:horizontal mode, PE: percentage of the available potential energy to the total energy,
[ ]rE : mean modal total energy in the hydrodynamic simulation during BITEX 93, GS:
geostrophic gyre (calculated as Rossby wave in the upper layer), TW: topographicwave, IW: (vertical mode 1) internal wave, SW: surface wave (seiche), CG: cyclonicgyre, AG: anticyclonic gyre, CC: cyclonic cell, AC: anticyclonic cell, NL: nodal line,NB: North Basin, N: north, S: south, and M: middle. Inertial period is 20.7 h. Calculated as the ratio of sum of the first two terms in Eq. 2.15 to sum of all the terms.# The sign [r] in the superscript indicates the sum of the conjugate pair, which havepositive and negative angular velocity with the same magnitude and the same modalstructure. References in the last column indicate the report of similar structure.Data sources are 1) Endoh (1986), 2) Endoh and Okumura (1993), 3) Kumagai et al.
(1998), 4) Kanari (1975), 5) Saggio and Imberger (1998), 6) Endoh et al. (1995a), 7)Okamoto and Endoh (1995), and 8) Kanari (1974). All data except 8) are based on fieldobservation during summer, while 8) is based on a two layer model where the depths ofthe North and South Basin are taken as 50 m and 5 m, respectively........................................17
Table 3.1. Characteristics of basin-scale internal waves in Lake Kinneret. Modal indices (firstcolumn) are assigned in ascending order of the angular frequency over all internalwaves (irrespective of their vertical structure), and the names (second column) areassigned on the basis of the corresponding internal wave structure in a flat-bottomedelliptical basin (see text). ( )r
opt and ( )rb are damping rates estimated respectively by the
mode-fitting technique and by using the equivalent linear bottom friction coefficient(Eq. 3.30). The estimated modal total energy ( [ ]rE ), rates of energy input ( [ ]rW ), and
rates of energy dissipation ( [ ]rD ) averaged over the field campaign are shown in the lastthree columns. Abbreviations are V: vertical mode, H: horizontal mode, C: cyclonicwave, and A: anticyclonic wave. Numbers in parenthesis indicate angularfrequencies with bottom friction. Inertial frequency is 7.83 10-5 rad s-1. The middlevalues indicate the optimum damping rates and dissipation rates, and left and rightvalues show the sensitivity calculated based on 5% increase of the mean square error(Eq. 3.25). If the upper bound of ( )r
opt goes to infinity, the corresponding upper bound of
[ ]rD is calculated from the energy input assuming the energy is immediately dissipated. .......56
8/2/2019 Thesis Kenji Shimizu
8/143
viii
List of figures
Fig. 2.1. Bathymetry of Lake Biwa and computational grids: (a) bathymetry of Lake Biwa andlocations of measurement stations, (b) magnified plan view of computational grid in A(common for both the modal analysis and ELCOM simulations), (c) computational gridalong cross-section B-B used for the modal analysis, and (d) schematic computational
grid along cross-section B-B used for the ELCOM simulations (vertical grid resolutionis finer than the schematic). Thin and thick lines in panel (a) show bathymetry contourwith 10-m interval and horizontal boundaries of computational grid at the surface and18-m deep, respectively. The dashed line indicates a boundary between the northernand southern halves that are used for the calculation of spatially averaged wind stressand its curl (see Fig. 2.7)............................................................................................................9
Fig. 2.2. Temperature profiles used for the modal analysis and the hydrodynamic simulations.The profiles in 1993 and 1994 were measured at BN50 and Sta. 17B, respectively. Forthe modal analysis with two-layer stratification, the depth of the interface was set to 18m (corresponds to maximum buoyancy frequency).................................................................10
Fig. 2.3. Internal waves in Lake Biwa: (a) V1H1, (b) V1H2, (c) V1H4, and (d) V1H6. The
middle panels correspond to the phase where the rates of energy input ( ( ))(RerW ) from
spatially uniform winds are the largest ( )(r = 30, 120, 115, 70, see Fig. 2.4), and the
right panels correspond to a quarter period after the left. Shading and vectors show theinterface displacement and the average velocity in the upper layer, respectively. In thesmaller left panels, shading and lines respectively show co-range contour and co-phaselines of wave trough with 45 interval. The co-phase lines with triangles correspond tothe phase shown in the middle figures, and the triangles show direction of rotation. Themodes are normalized to )(~ re = 2 GJ. Ellipses with dashed lines indicate cyclonic and
anticyclonic cells used to calculate the dispersion relationship (see Fig. 2.11). ......................19
Fig. 2.4. Normalized maximum energy input from spatially uniform winds blowing from
different directions. Since energy input depends on the phase of the mode, themaximize energy input is normalized by the norm of )(~ r and f (thus vertical axis
corresponds to ( ) ( ) ( ) 1/ , ,r r rW M f M f ). Wind direction is 0 when the wind is blowing
from the north, and it is positive clockwise. ............................................................................ 20
Fig. 2.5. Geostrophic gyres in Lake Biwa: (a) L1H1, (b) L1H2, and (c) L1H3. The panelsshow the most frequently observed phase during days 248-256 in the simulation results( )(r = -112.5, -135, 135). Shading and vectors show the interface displacement and
the average velocity in the upper layer, respectively. The modes are normalized to )(~ re
= 2 GJ......................................................................................................................................21
Fig. 2.6. Typical wind patterns over Lake Biwa: (a) the SE wind, (b) the lake breeze, and (c)the NW wind. All examples were taken from the wind field during BITEX93. Winddata measured at five land-based stations were corrected against the offshore stationdata (see text) and linearly interpolated over the lake. Circles and a triangle indicateland-based and offshore meteorological stations, respectively................................................22
Fig. 2.7. Spatially averaged (a) wind stress and (b) wind stress curl in 1994. Lake Biwa wassplit into northern and southern halves by the dashed line shown in Fig. 2.1, whichcorresponds to an approximate boundary between the First and Second Gyre. Datawere low-pass filtered with a cut-off frequency of 7 d. ........................................................... 22
Fig. 2.8. Comparison of temperature profiles at BN50: (a) EW and NS components of thewind velocity (positive when wind is blowing from west and south, respectively), (b)the thermistor chain data, and (c) the results of the simulation. All data were averagedand subsampled at 30-min interval for plotting purposes. Please note that the
8/2/2019 Thesis Kenji Shimizu
9/143
ix
discrepancy of temperature near the surface is due to negligence of surface heatdynamics in the simulation.......................................................................................................24
Fig. 2.9. Evolution of the amplitude and phase of (a) V1H1, (b) V1H2, (c) V1H4, and (d)V1H6 internal waves. Only relative magnitude of the amplitude have relevancebecause their absolute values depend on choice of normalization factor )(~ re . The phase
increases at a rate of )(r
when the modes are free, since the phase shown here is
related to the modes with positive natural frequencies. The results during the shadedperiod are not reliable since the interface displacement was too large to apply the lineartheory. The phase in panels (c) and (d) are also not reliable when the amplitudes arelow, e.g., days 242-245.............................................................................................................25
Fig. 2.10. Comparison of average velocity in the upper 10 m between field measurements byan ADCP over two days and the results of the simulations averaged over thecorresponding two days on (a) 22-23 June 1994 and (b) 26-27 July 1994. The observedvelocities along 11 transects in EW direction were linear interpolated to plot the ADCPdata. ..........................................................................................................................................26
Fig. 2.11. Dispersion relationship of the fundamental mode (a) Kelvin wave and (b) Poincar
wave in elliptic basins. Solid lines represent contour of the ratio of the natural angularfrequency to the inertial frequency 1 ( )rf , dotted lines indicate the natural period of
the V1H1-H8 internal waves in Lake Biwa, symbols indicate dispersion relation ofeach cell in their horizontal structure (see Fig. 2.3), a and b are the half-length of themajor and minor axis of a basin or a cell, respectively, and
longSand
latS are the Burger
number based on major and minor axis length respectively. For V1H1, the half-lengthof the thalweg was used as the major axis length.....................................................................28
Fig. 2.12. Comparison of (a) the modal total energy [ ]rE (Eq. 2.20) and accumulated energy
input ( )[ ]Re rW (Eq. 2.23), and (b) the phase deviation and accumulated phase input
( ) )()( 2/Im rr EW (Eq. 2.24) for V1H1 internal wave. In panel (b), the deviation of the
phase was calculated by straightening the extracted phase (Fig. 2.9a) and subtractingthe constant increase of phase at a rate of )(r . Since the phase input was not reliable
when the total energy was small, the accumulation of phase input was equated to thephase deviation on day 236.9 and 240.8 (triangles). See Table 2.1 and Fig. 2.9 for themeaning of [r] in the superscript and shaded period, respectively. ..........................................30
Fig. 2.13. Comparison of the modal total energy [ ]rE (Eq. 2.20) and accumulated energy input
( )[ ]Re rW (Eq. 2.22) for (a) sum of all geostrophic modes, and (b) L1H1 and (c) L1H2
geostrophic gyres. See Table 2.1 and Fig. 2.9 for the meaning of [r] in the superscriptand shaded period, respectively................................................................................................31
Fig. 2.14. Energy partitioning among different classes of modes extracted from the results of
the hydrodynamic simulation during BITEX93 using two layer approximation: (a)total energy [ ]rE and (b) accumulated energy input from winds ( )[ ]Re rW . The solid lines
show the accumulation for each class, and dashed, dotted, and dot-dash linescorrespond to the accumulation up to the 1st, 5th, and 10th internal wave modes and 1st,20th, and 50th geostrophic modes. See Table 2.1 for the meaning of [r] in thesuperscript. ...............................................................................................................................32
Fig. 3.1. Bathymetry of Lake Kinneret and locations of measurement stations. Circles andtriangles show locations of thermistor chains (equipped with wind sensor) and windsensors, respectively. Thick lines indicate horizontal boundaries of computational gridsfor modal computation with the interfaces at 14.4 m and 19.3 m deep, corresponding to25 C and 19 C isotherms. ......................................................................................................47
8/2/2019 Thesis Kenji Shimizu
10/143
x
Fig. 3.2. Results of the field experiment from 18 Jun to 01 Jul 2001. (a) Wind speed and (b)wind direction measured 2.4 m above the water surface at Ty (close to Tv), andisotherm depths at (c) Tg, (d) Tf, (e) T9, (f) T7, (g) Tv, and (h) T4. In panel (b), winddirection is 0 for wind blowing from north and positive clockwise. In panels (c-h),isotherms are plotted with 2 C interval with the top line being 25 C isotherm. 25 and19 C isotherms were used for the mode fitting, and dashed lines show basin-widetrends of the isotherm deepening used to calculate isotherm displacements. .......................... 48
Fig. 3.3. Background vertical structures. (a) Profiles of temperature, , and the associatedbuoyancy frequency,N, at T4 averaged from day 170.5 to 171.5, (b) modaldisplacements, )( nh , and (c) modal horizontal velocity, )( n , induced by vertical mode 1
~ 3 internal waves under continuous stratification shown in panel (a), and (d) thicknessof the BBL, hBBL, taken from Fig. 5 in Marti and Imberger (2006). In order to calculatethe vertical modes, the bottom boundary condition was imposed at 27 m deep,corresponding to the average depth. Horizontal dotted lines indicate depths of theinterfaces used for modal analysis. .......................................................................................... 50
Fig. 3.4. Diurnal internal waves in Lake Kinneret. (a, b) V2H3C and (c, d) V1H1C. Panels (a)and (c) correspond to internal wave field when net transport in the surface layer is from
west to east, corresponding to the phase during the strong diurnal westerly winds, andpanels (b) and (d) a quarter period after panels (a) and (c). Shading in panels (a, c) and(b, d), respectively, indicates )325.0 + and )325.0 , which approximately
correspond to V1 and V2 components of the displacements (see text). Solid linescorrespond to zero displacement, and vectors left and right, respectively, show layer-averaged velocity in the bottom and middle layer. .................................................................. 51
Fig. 3.5. Same as Fig. 4 but for semi-diurnal internal waves. (a, b) V1H3C and (c, d) V1H1A........52
Fig. 3.6. Comparison of 25 C and 19 C isotherm displacements at the six stations. (a) Tg,(b) Tf, (c) Tg, (d) T7, (e) Tv, and (f) T4. Solid lines: observation (detrended), dashedlines: prediction based on modal amplitude equations, Eq. 3.18 (used for fitting), anddotted lines: prediction (not used for fitting). .......................................................................... 55
Fig. 3.7. Decomposition of predicted 25 C and 19 C isotherm displacements at Tf into fiveinternal wave components. (a) Sum of the five internal waves, (b) V2H3C, (c) V1H1C,(d) V2H1A, (e) V1H3C, and (f) V1H1A.................................................................................57
Fig. 3.8. Estimated partitioning of (a) total (available potential plus kinetic) energy, (b)accumulated rate of work done by winds, and (c) accumulated rate of energydissipation. The lines show accumulation for each internal wave, so that the top linesshow the sum for the five internal waves.................................................................................59
Fig. 3.9. Spatial distribution of (a) bottom shear stress, (b) dissipation rate averaged in theBBL, (c) entrainment rate at the top of the BBL, and (d) mass transfer coefficient at thesediment-water interface. The values shown are 90th percentile for panel (a) and
average over the field campaign for panels (b-d). The BBL thickness is assumed to be afunction of depth (Fig. 3.3d), and Sc = 500 (corresponding to O2) is used to estimatethe mass transfer coefficient. Estimations were made only below the thermocline forpanel (b-d). The entrainment rate may be overestimated near the perimeter because thestrong stratification leads to lower mixing efficiency (Lemckert et al. 2004). ........................ 62
Fig. 3.10. Variables shown in Fig. 3.9 expressed as a function of bottom depth. (a) Bottomshear stress, (b) dissipation rate averaged in the BBL, (c) entrainment rate at the top ofthe BBL, and (d) mass transfer coefficient at the sediment-water interface. Open circlesshow 1-m (arithmetic) bin average of 90th percentile for panel (a) and average over thefield campaign for panels (b-d). The triangles in panel (b) indicate results of directturbulent measurements in the BBL at different locations by Lemckert et al. (2004).The entrainment rate may be overestimated in the metalimnion (shaded area in panel
8/2/2019 Thesis Kenji Shimizu
11/143
xi
[c]) because the strong stratification leads to lower mixing efficiency (Lemckert et al.2004).........................................................................................................................................63
Fig. 3.11. Absolute value of temporally averaged frequency response function defined as)()(
1)(
1)( ~~,
~ rrs
rr eavH
= . (see Eq. 3.26). Normalized forcing frequency and damping
rate are defined asf
r
f 1)( +
= and )(1)()( rrr +
= . Dotted lines, respectively, indicate
the angular frequencies of V1H1A, V1H3C, V2H1A, V1H1C, and V2H3C from left toright. .........................................................................................................................................65
Fig. 4.1. Ekman velocities, (uE, vE), when (uI,vI) = (1, 0) and t= 0 (see Eq. 4.14). Profiles (a)to (i) correspond to S = *1f = 0.30, 0.70, 0.90, 0.99, 1.00, 1.01, 1.10, and 3.00
with 1.5 offset for each profile. Profiles (a) and (i) are almost identical to the Ekmanlayer and the Stokes layer, respectively. Note the sharp transition of the structure near
S = 1.00. ................................................................................................................................79
Fig. 4.2. Ekman transport in the rotating bottom boundary layer, (Ebxq , Ebyq ), and sidewall
boundary layer,Ewyq , when (uI,vI) = (1, 0). (a) Real part (in phase with the far field
flow), and (b) imaginary part (quarter period ahead of the far field flow). In panel (b),solid and dashed lines coincide for 1
8/2/2019 Thesis Kenji Shimizu
12/143
xii
Fig. 4.6. Dissipative modal structure of Kelvin waves with S = 0.3 (first row), S = 0.6 (secondrow), S = 0.8 (third row), and Poincar waves with S = 0.8 (fourth row) and S = 10(fifth row) in linearly stratified basin withN= 1 and 22SB = . Shading and vector
show isopycnal displacements and horizontal velocities atz = -0.75, respectively. Thefirst column shows the dissipative modal structure when (E/S)1/2 = 0.05, and the secondshows the inviscid modal structure. The third to fifth columns correspond to first order
corrections due to the internal wave cancelling due to bottom boundary layer, spin-down, and internal wave cancelling due to sidewall boundary layer, respectively. Thevariables are divided byA in the fifth column, and by 5 and 2 in panels (n) and (t),respectively, for plotting purposes. See caption of Fig. 4.4 for number of modes usedfor plotting. ............................................................................................................................ 100
Fig. 4.7. Lake Kinneret. (a) Bathymetry, (b) typical stratification at T4 and associatedbuoyancy frequency in summer, and (c) vertical modes under stratification in panel (b).In panel (a), the origin of the figure is situated at 32.70N, 35.51E, and contour linesare drawn every 5 m...............................................................................................................103
8/2/2019 Thesis Kenji Shimizu
13/143
xiii
List of symbols
Variables
Roman (lowercase)
a0 Typical isopycnal displacement (m))(~ ra Modal amplitude ofrth ([quasi-] three-dimensional) mode (-)
),(~ srb Modal expansion coefficients (-)
c Celerity (m s-1)cb, csw Linear friction coefficient (m
s-1))(~ re Normalizing factor ofr
th (spatial) mode (J)
f Coriolis parameter (rad s-1))(~ rf Modal force for r
th mode (s-1)
f External force vectorg Accerelation due to gravity (m s-2)h Layer thickness (m)
i = 1 Imaginary unitk Layer index (-)k
Vertical unit vector (-)l Length element along horizontal boundary (m)
( )Tyx nnn ,= Unit normal vector to boundary (-)
p Pressure (N m-2)),('~ mlp Dynamic pressure induced by l
th vertical, mth horizontal three-
dimensional mode (N m-2)
Eq Ekman transport (m2 s-1)
r Radial coordinate (m)
( )Tyx sss ,= Horizontal unit normal vector to sidewall (-)
t Time (s)u x component of velocity (m s-1)
),( mlu
mth horizontal modal velocity that belongs to lth vertical mode
(m s-1)),(~ mlu Horizontal velocity in induced by lth vertical m
th horizontal
three-dimensional mode (m s-1)uE x component of Ekman velocity / Sidewall Ekman normal
velocity (m s-1)v y component of velocity (m s-1)vE y component of Ekman velocity (m s
-1)),( mlv
m
th horizontal modal velocity that belongs to lth vertical mode
(m s-1)),(~ mlv Horizontal velocity in induced by l
th vertical mth horizontal
three-dimensional mode (m s-1)
bfv 1
0
= Friction velocity (m s-1)
v Horizontal velocity vector (m s-1) (Chapter 2, 3) / Three-
dimensional velocity vector (m s-1) (Chapter 4))(r
kv Velocity vector in kth layer induced by rth mode (m s-1)
)(~ rkv
Modal velocity vector in kth layer induced by rth mode (m s-1)
we Entrainment rate (m s-1)
wE Ekman normal velocity (m s-1)
x Horizontal Cartesian coordinate (m)
8/2/2019 Thesis Kenji Shimizu
14/143
xiv
x Horizontal Cartesian coordinate vector (m) (Chapter 2, 3) /
Three-dimensional Cartesian coordinate vector (m) (Chapter 4)y Horizontal Cartesian coordinate (m)z Vertical coordinate (m)
Roman (uppercase)
A Plane area (m2) (Chapter 2, 3) / Aspect ratio (-) (Chapter 4)
B = f-2N2A2 Stratification parameter (-)C Characteristic celerity (m s-1)C Linear damping operator of shallow water systemCb Bottom drag coefficient (-)D Diffusion coefficient (m2 s-1)
][rD Rate of energy dissipation due to +randrmode (J s-1)
E Total energy of the system (J) (Chapter 2, 3) / Ekmannumber ( )21 = Hf (-) (Chapter 4)
E(r) Modal total energy ofrth mode (J)
E[r] Modal total energy of +randrmode (J)
F Energy flux (J m-2 s-1)
H Total depth (m)K Linear operator of non-dissipative shallow water systemL Horizontal length scale of a basin / length of a rectangular basin
( ) 4/12/2 DLB = Batchelor length (m)
M Weight matrix
zgN =10
Buoyancy frequency (rad s-1)
O Zero matrixR Radius of a circular basin (m)S = c (fL)-1 Burger number (-)Sc = D-1 Schmidt number (-)T Period (s)
U Stretched horizontal velocity (m
s
-1
)V Volume (m3)W Stretched vertical velocity (ms-1)X Stretched horizontal coordinate (m)Z Stretched vertical coordinate (m)
)(rW Complex rate of work done to rth mode (J s-1)
][rW Rate of work done to +randrmode (J)
Greek (lowercase)
Mass transfer coefficient (m s-1) (Chapter 3) / Vertical wave
number of bottom boundary layer flow (m-1) (Chapter 4))(r Damping rate ofr
th mode (rad s-1)
Thickness of sublayer (m)
=
=otherwise
jiifji 0
1,
Kronecker delta
( )x
Dirac delta function
Error or residual (various) Dissipation rate of turbulent kinetic energy (m2s-3)
( )
( ) ( )
>
==
1/
1/
01
01
k
k
kk
k
Non-dimensional density difference across k
th interface (-)
1= cfR Rossby radius of deformation (m)
von Karman constant (= 0.41) (Chapter 3)
Kinematic viscosity (m2
s-1
)
8/2/2019 Thesis Kenji Shimizu
15/143
xv
)( l Vertical modal structure (of pressure and horizontal velocities)
in a continuously stratified basin (-) Volume stream function (m
2 s-1)
Azimuthal coordinate (rad)(r) Modal phase ofrth mode (rad) Density (kg m
-3)
( )Tyx ,=
Shear stress vector (N m-2)
Angular frequency (rad s-1) State vector of motion for shallow water system
)(~ r Spatial modal structure ofrth ([quasi-] three-dimensional) mode
Surface/interface displacement (m))(r
k Displacement in kth interface induced by rth mode (m)
)(~ rk Modal displacement in kth interface induced by r
th mode (m)),( ml
mth horizontal modal displacement that belongs to lth vertical
mode (m)
Greek (uppercase)
mix Mixing efficiency (-)( )Tf 2/00=
Local vertical angular velocity vector of Earth (rad s-1)
Subscripts0 Nominal value / 0th order solution (Chapter 4)1 1st order solution (Chapter 4)b Bottome Vertical variation at the equilibriumf Forcingiwc Internal wave cancelling
k(>0) Layer indexm Moleculars Surfacesp Spin-downsw Sidewallx x component in Cartesian coordinatey y component in Cartesian coordinatez Vertical componentBBL Bottom boundary layerDSL Diffusive sublayerE Ekman layer / Ekman normal velocityI Far-fieldSW Sediment-water interfaceVSL Viscous sublayer
Superscriptsg Geostrophic mode(l) Vertical modal index(m) Radial modal index(n) Azimuthal modal index(r) Modal index for (quasi-) three-dimensional mode(p), (q), (s) Dummy modal indices[r] Sum of +rand -rmodew Wave modeL Left modeR Right mode
8/2/2019 Thesis Kenji Shimizu
16/143
xvi
+ Non-dimensionalized variable
Mathematical operators
( )diag Diagonal matrix (diagonal components are shown in the
argument)( )* Complex conjugate
( )T Transpose
( )H Conjugate transpose (or Hermitian)
( ) Temporal average
,,,,, rzyxt Partial derivative with respect to the variable in the subscript
(various) Horizontal differential operator (m-1) (Chapter 2, 3) / Three-
dimensional differential operator (m-1) (Chapter 4)( ) = dA
H '', Inner product
8/2/2019 Thesis Kenji Shimizu
17/143
xvii
Acknowledgements
Looking back the beginning of this journey, it was a fortunate coincidence I came to
CWR. I wanted to study overseas I wanted to do research that contributes to scientific
understanding and to write international papers. I found a new Japanese governmentscholarship starting from 2005 few days after the deadline, but there was no one who
had applied for it and N. Tsutsumida at Tokyo Institute of Technology kindly accepted
my late application. I knew of CWR as T. Ishikawa, my supervisor in my Masters, had
long-term collaboration with CWR, and I was accepted by CWR probably because of
his recommendation.
I could not have achieved this milestone without the continuous encouragement and
support of my supervisor, Jrg Imberger. I worked hard as I knew my scholarship wasonly for three years from the beginning, but I would not have been able to finish my
PhD in three years and a few months without his hard work and patience, particularly
for last few months. I have achieved what I aimed thanks to Jrg he accepted and
extended my ideas (I was told originality was not appreciated in Japan!) and helped me
out writing the ideas down in papers in English. I am happy to have had at least a
glimpse into world-leading research. I also thank Jrg for giving me opportunities to
travel to Kenya and South America, where I had never imagined visiting.
I appreciate collaboration with Dr. Kumagai and Dr. Jiao at Lake Biwa
Environmental Research Institute, who kindly provided bathymetry, meteorological
data, and water quality data from Lake Biwa during the first part of my study. They also
contributed to the study through discussion on formation mechanisms of the gyres.
I am grateful for valuable and helpful discussions with S. Morillo, P. Okely, P.
Yeates, A. Gmez-Giraldo, A. de la Fuente, A.M. Simanjuntak, K. Nakayama, T.
Shintani, and J. Antenucci. I hope I helped them as much as they helped me.
Particularly, discussion with A. Gmez-Giraldo on preliminary ideas of the modal
analysis encouraged me in developing the theory, and tough questions from A. de la
Fuente on the theory contributed making it clearer. P. Okely helped me a lot by
correcting my English in the early stage of my writing the first paper (how many articles
she corrected before Jrg read the draft!). I thank J. Antenucci, C.J. Dallimore, A.
Gmez-Giraldo, T. Johnson, P. Okely, T. Shintani, and anonymous reviewers of the
first two papers for reading the manuscripts of my papers and giving me constructive
8/2/2019 Thesis Kenji Shimizu
18/143
xviii
and critical comments. R. Alexander, I. Hillmer, P. Okely, and J. Petruniak gave me
valuable comments on my final thesis presentation.
Support of staff and friendship of students in CWR and SESE made my study really
enjoyable. Playing sports and having fun together plus a bit of (a lot of?) distraction
from my work were great help to me, as I tend to work far too much when I push
myself. I particularly thank A.M. Simanjuntak for helping me out to settle in CWR and
Perth and my officemates P. Yeates, S. Morillo, A. de la Funte, C. Boon, P. Okely,
and P. Huang for being tolerant for me talking to myself loudly while I was
programming and solving equations! (Actually, I dont have to thank A. de la Funte as
everyone agrees that he was much noisier than me haha!)
Finally, to my friends, housemates, and family thank you very much for supportingme during this long tough journey!
I appreciate financial support of Japanese Government (MEXT) scholarship, Tokyo-
Tech Long Term Overseas Study Support Program, and ad-hoc CWR scholarship.
8/2/2019 Thesis Kenji Shimizu
19/143
xix
Preface
This work was completed during the course of my enrolment for the degree of
Doctor of Philosophy at the Centre for Water Research (CWR), The University of
Western Australia. The main body of this thesis (Chapter 2 to Chapter 4) is acompilation of three papers written for journal publication. Each chapter is a stand-
alone manuscript, which includes abstract, literature review, methods, results,
discussion, and conclusions. The introductory Chapter 1 presents the motivation for this
study and links the following three chapters. The major outcomes of this work are
summarized in Chapter 5 followed by recommendations for future work.
Chapter 2 has been published inLimnology and Oceanography as Shimizu, K., J.
Imberger, and M. Kumagai. 2007. Horizontal structure and excitation of primarymotions in a strongly stratified lake. Limnol. Oceanogr. 52: 2641-2655. The processing
of field data and three-dimensional modeling was conducted by myself under
supervision of Jrg Imberger, and the theory of modal analysis and numerical scheme
for modal computation were developed by myself. Jrg Imberger also checked scientific
integrity of the research and edited the manuscript thoroughly, which was originally
written by myself. Michio Kumagai contributed to the work through provision of field
data and discussion on dynamics and formation mechanisms of gyres.
Chapter 3 is in press byLimnology and Oceanography as Shimizu, K., and J.
Imberger. Energtics and damping of internal waves in a strongly stratified lake. Jrg
Imberger suggested the original idea of extracting internal wave modes from thermistor
chain data, and I developed a method to fit numerically computed modes based on the
modal amplitude equations with estimating the damping rates. All the data processing,
modal calculation, and mode fitting were done by myself. The manuscript was
originally written by myself and edited by Jrg Imberger.
Chapter 4 is to be submitted toJournal of Fluid Mechanics as Shimizu, K., and J.
Imberger. Damping mechanisms of internal waves in a continuously stratified rotating
basin. Jrg Imberger identified the problem of how gravity waves are damped by thin
boundary layer without momentum diffusion during the work presented in Chapter 3.
He then suggested solving the problem using the perturbation method. I obtained the
understandings of the damping mechanism referred to as internal wave canceling by
following previous studies, and further combined it with the spin-down process to
8/2/2019 Thesis Kenji Shimizu
20/143
xx
extend the analyses to a stratified rotating basin. All the mathematical derivations and
writing were originally done by myself and checked by Jrg Imberger.
I have the permission of all the co-authors to include the above manuscripts in my
thesis.
Kenji Shimizu Jrg Imberger
(Coordinating supervisor)
8/2/2019 Thesis Kenji Shimizu
21/143
Chapter 1. Introduction
1
Chapter 1.Introduction
1.1 MotivationModal analysis has been a useful standard tool in vibration problems of particles and
solid bodies. These systems have natural periods of oscillation and the associated
distinct spatial structure inherent to the system, called modes, satisfy general orthogonal
relationships. Use of modes and their orthogonality reduces the original coupled
problem of multi-degree of freedom (or partial differential equations) into a set of
decoupled modal amplitude equations for individual modes that are equivalent to the
governing equation for a single harmonic oscillator (e.g., Timoshenko et al. 1974). The
method is applicable even for large number of particles or solid bodies with complicated
shape, where analytic solutions are difficult to obtain, as the theory is applicable to
numerically computed modes. Spatial and temporal effects of forcing are also separated
in this method: spatial correlation between forcing and modal structure determines the
effectiveness of the forcing exciting the mode, expressed as a modal force term,
whereas the modal amplitude equations (with the modal force term) describe temporal
interactions between each mode and the forcing, including excitation, canceling
(Mortimer 1953), phase shift (Raudsepp et al. 2003; Gmez-Gilaldo et al. 2006), andresonance (Antenucci and Imberger 2003; Gmez-Giraldo et al. 2006), all of which
have been observed in stratified lakes and semi-enclosed seas. By separating total
motion into modal components and effects of forcing into spatial and temporal factors,
modal analysis provides conceptual and general understandings of linear dynamics of
such systems that are not easily obtainable from experiments or numerical simulations.
It is well known that this method can be applied to fluid motions in non-rotating
semi-enclosed shallow basins (e.g., Lamb 1932), such as small lakes. Application of
linear modal analysis is often beneficial as fluid motions in a geophysical scale are often
well described by linear theory (e.g., Csanady 1975). Although less attention has been
paid recently, the method can be extended to stratified rotating basins. Orthogonality of
the modes was shown by Proudman (1929) for homogeneous rotating shallow basins,
and Platzman (1972, 1975, 1984) applied modal analysis to numerically compute tides
in the world ocean. Numerical schemes to calculate modes in stratified basins with
8/2/2019 Thesis Kenji Shimizu
22/143
Application of modal analysis to strongly stratified lakes
2
arbitrary shape have been proposed, for example, by Schwab (1976) and Buerle
(1985). However, the theory has not been well developed for stratified rotating basins.
This thesis is aimed to obtain better and unified understandings of basin-scale
motions in stratified rotating lakes using modal analysis. This purpose was achieved by
extending the theory to both layer- and continuously stratified rotating basins with
arbitrary shape. One of the advantages is that the method provides general and relatively
simple framework to understand dynamics of basin-scale motions in real lakes through
numerical computation of modes, unlike analytical studies where the basin shape needs
to be simplified. Another advantage is the orthogonality of modes that enables us to use
generalized Fourier series for theoretical study and to extract modal components from
simulation results and field data, providing new tools for theoretical, numerical, and
field studies. These points will be illustrated in the following chapters.
1.2 OverviewFollowing this brief introduction are three chapters where theory of modal analysis
for both layer- and continuously stratified lakes are developed and applied to better
understand evolution, excitation, energetics, and damping of basin-scale motions in
stratified rotating lakes, and the implications on mass transport processes.Excitation of basin-scale motions was investigated in Chapter 2 byextending the
theory of modal analysis to layer-stratified basins with arbitrary bathymetry. The
shallow water equations were reduced to modal amplitude equations that describe
evolution of individual modes forced by wind stresses. It was shown that winds excited
modes that had similar horizontal velocity structure in the surface layer compared to the
wind stress pattern. Numerically calculated modes were then used to show how winds
preferentially excited certain modes in basins with irregular shape. Evolution of modeswas extracted from results of three-dimensional hydrodynamic simulation results in
order to assess applicability of the linear modal analysis to basin-scale motions in lakes.
Damping was neglected in this chapter.
In Chapter 3, the theory was extended to include linear damping and then applied to
estimate energetics and damping rates of basin-scale internal waves from thermistor
chain data. The results indicated that basin-scale internal waves were damped within a
few periods. Bottom friction was considered as a primary cause of the fast damping,
8/2/2019 Thesis Kenji Shimizu
23/143
Chapter 1. Introduction
3
although it was not clear how bottom friction confined within a thin boundary layer was
able to damp internal waves quickly. The estimated near-bottom current velocities were
also used to estimate spatial variability of near-bottom mass transfer processes.
To answer the question about fast damping of basin-scale internal waves, the
damping processes were analytically investigated in Chapter 4. The damping
mechanism was understood as a combination of two fast damping mechanisms: waves
generated by oscillatory boundary layers cancelling the parent wave (Johns 1968; Mei
and Liu 1973) and the well-known spin-down (Greenspan 1968; Pedlosky 1979; Gill
1982) modified by the periodicity. The theory of modal analysis was extended to a
continuously stratified basin, and applied to flat-bottomed rectangular and circular
basins in this chapter.
Major conclusions obtained in these studies and recommendations for future work
are summarized in Chapter 5.
8/2/2019 Thesis Kenji Shimizu
24/143
Application of modal analysis to strongly stratified lakes
4
Chapter 2. Horizontal structure and excitation of primary motionsin a strongly stratified lakes
Abstract
A modal analysis in the horizontal plane was extended to a layer-stratified basin
with irregular bathymetry, and the theory was applied to Lake Biwa to investigate the
horizontal structure and excitation of the basin-scale internal waves and gyres. The
horizontal structure of the basin-scale internal waves consisted of cyclonic and
anticyclonic elliptic cells, each of which appeared to follow the dispersion relationship
of Kelvin and Poincar waves in elliptic basins. The internal waves were preferentially
excited depending on the arrangement of the cells and the wind direction, but the
spatial distribution of wind stress curl over the lake primarily determined the horizontalstructure of the ensuing gyres. Decoupled evolutionary equations for the individual
modes provided a good approximation for excitation of the internal waves and early
stages of excitation of the gyres before non-linear effects and damping become
significant. The modal decomposition of hydrodynamic simulation results also showed
that the primary action of the wind was to excite the internal waves; however, these
internal waves were damped within a few days and the dynamics during calm periods
were dominated by the gyres, illustrating the importance of internal waves on mixing
and gyres on long-term horizontal transport.
2.1 IntroductionMotions in a lake are primarily energized by surface wind stresses. Wind excites
primary motions including seiches, basin-scale internal waves and gyres, which in turn
cause secondary motions, such as high-frequency internal waves and residual
circulation (Imberger 1998; Okely and Imberger 2007). The spatial structure and
amplitude of these motions have important implications for chemical and biologicalprocesses in lakes since they determine the flux path of biogeochemicalsubstances
(e.g., Nishri et al. 2000; Eckert et al. 2002). Understanding of the spatial structure and
excitation of primary motions provides the foundations for the understanding of
subsequent physical, chemical, and biological processes.
Published as: Shimizu, K., J. Imberger, and M. Kumagai. 2007. Horizontal structure and excitation ofprimary motions in a strongly stratified lake. Limnol. Oceanogr. 52: 2641-2655. Centre for WaterResearch Reference ED 2116-KS.
8/2/2019 Thesis Kenji Shimizu
25/143
Chapter 2. Horizontal structure and excitation of primary motions
5
The horizontal structure of basin-scale internal waves may conveniently be
visualized in terms of fundamental mode Kelvin and Poincar waves in flat-bottomed
circular or elliptic basins (Antenucci and Imberger 2001). A Kelvin wave has a
subinertial frequency and propagates cyclonically around the basin (counterclockwise in
Northern Hemisphere and clockwise in Southern Hemisphere), and it has a horizontal
structure that depends on the Burger number ( ) 1= fLcS , where c is the celerity, f the
Coriolis parameter, and L the horizontal length scale (Antenucci and Imberger 2001).
When the Burger number is small, the interface displacement and velocity are largest at
the boundary and decay exponentially offshore with a length scale given by the Rossby
radius of deformation 1= cfR (Antenucci and Imberger 2001). When the Burger
number is large, the frequency becomes superinertial, and the horizontal structure
approaches that of a Poincar wave (Antenucci and Imberger 2001). (Although the
name, Kelvin wave, is not assigned to superinertial cyclonic waves, we shall use the
name in this paper for the fundamental mode cyclonic wave.) A Poincar wave
propagates anticyclonically (clockwise in Northern Hemisphere) with a maximum
velocity in the middle of the basin and zero velocity at the boundary (Antenucci et al.
2000).
In real basins, irregular bathymetry modifies the horizontal structure of a Poincar
wave by localizing the wave (Wang et al. 2000) or by introducing an accompanying
cyclonic cell (Gmez-Giraldo et al. 2006); whereas the horizontal structure of a Kelvin
wave appears insensitive to basin irregularities (Mortimer 1974; Gmez-Giraldo et al.
2006). Recently Gmez-Giraldo et al. (2006) analysed an internal wave consisting of an
anticyclonic cell and a cyclonic cell in Lake Kinneret and suggested that the cells were
governed by the dispersion relationship of Poincar and Kelvin waves, respectively, in a
circular (or elliptic) basin.
Excitation of basin-scale internal waves depends on both the temporal and spatial
variations of the wind forcing. Analytical solutions of internal waves excited by a
suddenly imposed wind show that the amplitudes increase in the first half of the wave
period, reach a maximum after half the period and then decrease in the second half
period (e.g., Birchfield 1969; Stocker and Imberger 2003). Field and modelling studies
indicate that excitation or cancellation of an internal wave depends on the phase
between the wave and the wind (Mortimer 1953;Antenucci et al. 2000; Rueda et al.
8/2/2019 Thesis Kenji Shimizu
26/143
Application of modal analysis to strongly stratified lakes
6
2003), and that winds not only excite internal waves but also shift their observed phase
due to generation of additional internal waves (Gmez-Giraldo et al. 2006). The
effectiveness of winds in excitation or cancellation also depends on the spatial
distribution of the wind stress field over the lake and the horizontal structure of internal
waves; however, this interplay is not well understood in an irregular basin.
Unlike basin-scale internal waves that are excited directly by wind, gyres may be
excited by wind stress curl (Emery and Csanady 1973; Endoh 1986), topographic
effects (Csanady 1973), residual current resulting from internal waves (Ou and Bennett
1979), and thermal effects (Huang 1971; Schwab et al. 1995). Although thermal effects
can be important on a seasonal timescale (Schwab and Beletsky 2003; Akitomo et al.
2004), recent studies indicate that, for timescales shorter than seasonal, wind stress curl
and topographic effects are the major driving forces of gyres (Laval et al. 2003, 2005;
Rueda et al. 2005) and that the contributions from internal waves are minor (Pan et al.,
2002). We will limit our focus to wind-driven gyres in this paper.
The spatial structure of wind-driven gyres depends strongly on the spatial
distribution of the wind (Pan et al. 2002) and bathymetry(Csanady 1973). Theoretical
analysis of flat basins without the variation of the Coriolis parameter (the f -plane)
indicates that the horizontal structure of gyres is determined by external forcing(Proudman 1929; Gill 1982). Variations in depth induce a topographic gyre due to
larger specific momentum input in a shallow coastal region compared to that in deeper
regions (Csanady 1973). A topographic gyre degenerates primarily into topographic
waves after the wind ceases (Raudsepp et al. 2003), and propagates cyclonically around
the basin with the periods and horizontal structure determined primarily by the basin
shape and bottom slope (Rhines 1969). In strongly stratified lakes, currents associated
with gyres are observed only in the epilimnion, and the geostrophic pressure associated
with the circulation induces doming (or depression) of the pycnocline (Endoh et al.
1995a; Kumagai et al. 1998; Laval et al. 2005).
Lake Biwa is the largest lake in Japan, consisting of the relatively deep North Basin
and shallower South Basin. This lake will be used to illustrate the theoretical
developments made in this paper, as several basin-scale internal waves and a gyre
system consisting of two or three gyres have previously been identified. The dominant
internal wave is the vertical and horizontal mode 1 Kelvin wave (Kanari 1975), and
8/2/2019 Thesis Kenji Shimizu
27/143
Chapter 2. Horizontal structure and excitation of primary motions
7
second, third, and fourth horizontal mode basin-scale internal waves have also been
observed after strong winds (Saggio and Imberger 1998). The largest and most
persistent cyclonic gyre in the north of the North Basin (First Gyre) is often
accompanied by an anticyclonic gyre in the middle of the basin (Second Gyre) both of
which induce circular currents with a characteristic water velocity of 0.1 m s-1 (Endoh
and Okumura 1993). An unstable cyclonic gyre has also been found in the south of the
North Basin (Third Gyre), and long-term current measurements have shown that the
locations and the number of gyres change on a seasonal timescale (Kumagai et al.
1998). It has not, however, been shown why the internal waves of higher horizontal
modes are excited and what determines the horizontal structure of the gyres.
The purpose of this paper is to obtain a better and more comprehensive
understanding of the spatial structure and excitation of internal waves and gyres by
using a modal analysis in the horizontal plane. This technique has been previously used
to analyse the horizontal structure of tides and seiches in homogeneous basins
(Platzman 1972; Rao andSchwab 1976) and internal waves in stratified basins (Buerle
1985, Lemmin et al. 2005). However, the analysis also enables us to derive a set of
decoupled evolutionary equations for the individual modes (e.g., Proudman 1929;
Lighthill 1969;Platzman 1984) that describe the effects of winds on the primary
motions. Simulations with the three-dimensional hydrodynamic model ELCOM
(Estuary, Lake and Coastal Ocean Model, Hodges et al. 2000; Laval et al. 2003;
Simanjuntak et al. Submitted) are also used to confirm the results obtained from the
semi-analytical modal analysis.
This paper is structured as follows. First, the field data used in this paper will be
briefly described.Second, we will describe the extension of the theory of modal
analysis in the horizontal plane to a layer-stratified basin and demonstrate its application
to Lake Biwa. Third, we will illustrate how the modal components can be extracted
from the results of the three-dimensional hydrodynamic simulations to confirm the
results of the modal analysis. Finally, we will discuss some implications of the results
for a strongly stratified lake in general.
8/2/2019 Thesis Kenji Shimizu
28/143
Application of modal analysis to strongly stratified lakes
8
2.2 Field DataThis study uses field data collected in 1993 and 1994 for wind speed and direction,
temperature profile, and velocity structure in the water column in Lake Biwa. Wind data
were measured at five land-based stations around the lake by the AutomatedMeteorological Data Acquisition System (AMeDAS; managed by Japan Meteorological
Agency) and at BN50 during Biwako Transport Experiment (BITEX93; 21 Aug -16
Sep 1993) (Fig. 2.1).Since the wind speed measured at land-based stations was
considerably lower than that measured at BN50, the wind speed measured at the land-
based stations were correlated to the wind speed at BN50 and then corrected by
multiplying by a factor of 2.5. Temperature profiles were measured by a thermistor
chain at BN50 during BITEX93 and as part of biweekly routine measurements at Sta.
17B in 1994 (Fig. 2.2). The thermistor chains had 20 thermistors spaced every 1 m in
the thermocline, extending up to 5 m apart near the surface and the bottom where the
stratification was weaker (seeSaggio and Imberger [1998] for details). Vertical profiles
of water velocity were measured by a shipboard broad-band acoustic Doppler current
profiler (ADCP) on a monthly basis in 1994 along 11 transects in W-E direction,
covering the whole North Basin (seeKumagai et al. [1998] for details).
8/2/2019 Thesis Kenji Shimizu
29/143
Chapter 2. Horizontal structure and excitation of primary motions
9
N
36.45 N135.90 E
Imazu
Hikone
Ohtsu
Torahime
Minami Komatsu
Shiozu bay
BN50
Land-based meteorological
Thermistor chain & wind sensor
* contour line every 10 m
Sta.17B
Routine temperature profiling
a)
Ab) Plan view of computat ional grid in A
c) Computational grid along
B-B (modal analysis)
d) Schematic computational grid
along B-B (ELCOM)
,huvw
B B
S
outh
Basin
Nor
thB
asi
n
50 10km
15
Fig. 2.1. Bathymetry of Lake Biwa and computational grids: (a) bathymetry of Lake Biwa and
locations of measurement stations, (b) magnified plan view of computational grid in A (common for
both the modal analysis and ELCOM simulations), (c) computational grid along cross-section B-B
used for the modal analysis, and (d) schematic computational grid along cross-section B-B used for
the ELCOM simulations (vertical grid resolution is finer than the schematic). Thin and thick lines
in panel (a) show bathymetry contour with 10-m interval and horizontal boundaries of
computational grid at the surface and 18-m deep, respectively. The dashed line indicates a
boundary between the northern and southern halves that are used for the calculation of spatially
averaged wind stress and its curl (see Fig. 2.7).
8/2/2019 Thesis Kenji Shimizu
30/143
Application of modal analysis to strongly stratified lakes
10
5 10 15 20 25 30
0
10
20
30
40
50
60
70
80
90
100
Temperature (C)
Depth(m)
25 Aug 199320 Jun 199418 Jul 19942 layer (1993)
Fig. 2.2. Temperature profiles used for the modal analysis and the hydrodynamic simulations. The
profiles in 1993 and 1994 were measured at BN50 and Sta. 17B, respectively. For the modal
analysis with two-layer stratification, the depth of the interface was set to 18 m (corresponds to
maximum buoyancy frequency).
2.3 Theory of modal analysis2.3.1 Basic equations and solutions
The modal analysis used in this paper is based on the linearized shallow waterequations for a layer-stratified systemwith the Boussinesq and hydrostatic
approximations(e.g., Monismith 1985; Lemmin et al. 2005). For an incompressible
fluid in a two-layer system, multiplying the equation of conservation of mass for the
upper (lower) layer by the acceleration due to gravity (reduced gravity) and including
layer thickness in the equations of motion gives:
( ) ( ) ( )tkxtkxitkxt ,,,,,,
fKM += (2.1)
where
( ) ( )Tvvtkx 2121,,
= (2.2)
is the state vector of motion,
( ) ( )Tstkx 000,,
=f (2.3)
is the external force vector,
8/2/2019 Thesis Kenji Shimizu
31/143
Chapter 2. Horizontal structure and excitation of primary motions
11
( )
=
22212
111
22
2111
0
20
020
000
00
,
hghgh
hgh
hg
hghg
ikx
K (2.4)
is the linear operator of the shallow water system,
( )
=
2
1
2
1
0
000
000
000
000
,
h
h
g
g
kx
M (2.5)
is the weight matrix, t is the time, ( )Tyxx ,= represents the horizontal coordinates, k
( 1, 2= ) is the layer index, is the surface or interface displacement, ( )Tvuv ,= are the
layer-averaged velocities, g is the acceleration due to gravity, h is the layer thickness,
( )Tf 2/00=
is the local vertical angular velocity due to Earths rotation, f is the
Coriolis parameter, ( )Tsysxs ,= are the surface stresses, is the density, 011 / =
and ( ) 0122 / = are the non-dimensional density differences across the surface and
interface, respectively, 1=i is the imaginary unit, t is the temporal differential
operator, and ( )Tyx = , is the two-dimensional horizontal differential operator.
Subscripts 1 and 2 denote the upper and lower layers respectively, subscript 0 denotes a
reference value, superscript Tstands for the transpose and bold face is used to denote
mathematical vectors and matrices.
Multiplying Eq. 2.1 by 1M yields an equation with the Laplaces (tidal) operator
used by Platzman (1972) and Buerle (1985); however, we choose to retain M for
convenience as shown below. The boundary condition on each layer is given by zerovolume flux normal to the boundary:
( ) 0= kkk nvh
(2.6)
where n
is the normal vector to the boundary.
8/2/2019 Thesis Kenji Shimizu
32/143
Application of modal analysis to strongly stratified lakes
12
Assuming basin-scale coherent motion and no external forcing, separation of
variables of the form tiekxtkx ),(~
),,(
= converts Eq. 2.1 into a generalized
eigenvalue problem:
KM~~
= (2.7)
Solutions to Eq. 2.7 include linearly independent solutions of the form:
( ) ( )tir
r
ekxtkx)(
,~
,, )(
= (2.8)
where ( )Trrrrr vv )(2)(1)(2)(1)(~~~~~ = are the spatial modal structureand )(r are the
natural angular frequencies, and ( )r in the superscript are the modal indexes (note that
the absolute value of )(~ r are arbitrary since they are eigenfunctions; a tilde denotes
variables whose magnitude depends on the normalization factor ( )(~ re in Eq. 2.15)
throughout this paper). Corresponding to every solution in Eq. 2.8, there is a conjugate
solution whose spatial modal structure and natural angular frequency are given by*)(~ r
and )(r , where * stands for the complex conjugate.
Solutions ofEq. 2.7, with the boundary condition Eq. 2.6, consist of four classes of
modes: Gravity modes, vorticity modes, geostrophic modes, and quiescent modes
(Platzman 1975; Rao and Schwab 1976). The first three modes correspond to primary
motions, while quiescent modes are associated with spatially uniform change of the
surface or interface level and induce no motion. Gravity modes consist of surface waves
(seiches) and internal waves, both being in a balance (to the first approximation)
between gravity and inertia, and vorticity modes include planetary Rossby waves and
topographic waves, where the Coriolis force balances inertia. Geostrophic modesrepresent steady circulation that are in geostrophic balance and evolve under external
forcing. Although geostrophic modes do not appear in a rotating homogeneous basin
with variable depth (Platzman 1975), they are supported in a stratified basin if the
variation of the Coriolis parameter is neglected, as may be shown as follows.
Assuming steady state and no forcing, we may take the curl of the equations of
motion Eq. 2.1, which yields:
8/2/2019 Thesis Kenji Shimizu
33/143
Chapter 2. Horizontal structure and excitation of primary motions
13
( ) ( ) 0// 11111 == vhffghf
(2.9)
and
( ) ( ) ( ) 0// 2222112 ==+ vhffgghf
(2.10)
where the geostrophic balance between the pressure gradient and Coriolis force is used
to derive the second expression. These equations form the conditions for the existence
of geostrophic modes. If the variation of the Coriolis parameter is neglected, the layer
thickness must be constant for any surface or interface displacement (hence velocity) to
retain a degree of freedom. Although this condition is not satisfied in the lower layer
and the coastal zone of the upper layer where the water column is not stratified,
geostrophic modes do exist in the upper layer of a lakes interior where 01 =h . If thevariation of the Coriolis parameter (the -effect) is included, a gradient of potential
vorticity converts such geostrophic modes into Rossby waves.
2.3.2 Some property of modesThe modes discussed above have some useful properties. To see this, consider the
inner product:
, ' 'H dA= (2.11)
where the superscript H stands for the conjugate transpose, the prime denotes different
state of motion and the integral is taken over the whole domain. As shown in Appendix
2.A, the operator K , along with the boundary condition (Eq. 2.6), is Hermitian (or self-
adjoint):
', ',= K K (2.12)
This property leads to the orthogonality of modes unless modes are degenerate, or more
than one mode has the same natural angular frequency (Proudman 1929),
( ) ( ) ( ),,
r s r
r se = M (2.13)
( ) ( ) ( ) ( ),,
r s r r
r se = K (2.14)
8/2/2019 Thesis Kenji Shimizu
34/143
Application of modal analysis to strongly stratified lakes
14
wheresr, is the Kronecker deltaand
)(~ re is twice the total energy of the rth mode
when the amplitude of the mode is unity:
( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )0 1 1 1 2 2 2 1 1 1 2 2 2, , , ,r r r r r r r r r e g g v h v v h v = + + + (2.15)
Another useful property is the completeness. Any analytic state vector may be
expressed in a convergent series of the form
( ) ( ) ( )+
=
=r
rr takxtkx)()( ~,
~,,
(2.16)
where )(~ ra is the complex modal amplitude of rth mode that can be calculated from:
(Proudman 1929)
( ) ( ) ( )( ) ( ) 1 ( ) , , , ,r r ra t e x k x k t = M (2.17)
The absolute value )(~ ra and angle ( )r , defined as
( )( )( )( )( )
( )
( ) 1
( )
Imtan
Re
r
r
r
a tt
a t
=
(2.18)
determine the amplitude and phase of the mode, respectively. The completeness means
that the series expansion (Eq. 2.16) is convergent in the weighted square mean sense:
( ) ( )( )1
2r
r
E t E t +
=
= = ,M (2.19)
where E is the total energy of the system, and
( ) ( )
2)()()( ~~2
1taetE
rrr
= (2.20)
the modal total energy of rth mode.
2.3.3 Decoupled dynamic equations of individual modesThe orthogonality of modes enables us to derive a set of decoupled evolutionary
equations for each mode as was shown by Lighthill (1969) and Timoshenko et al.
(1974). For our case, this may be achieved by substituting the series expansion (Eq.
8/2/2019 Thesis Kenji Shimizu
35/143
Chapter 2. Horizontal structure and excitation of primary motions
15
2.16) to Eq. 2.1, changing the modal index from r to s , taking the inner product with a
particular mode )(~ r , and using the orthogonality (Eqs. 2.13 and 2.14). This yields:
( ) ( ) ( )tftaeitae rrrrrtr )()()()()()( ~~~~~
+= (2.21)
where the modal force )(~ rf is defined by:
( ) ( ) ( ) ( ) ( )( ) ( ) ( )1, , , , , ,r r r
sf t x k x k t v x x t = = f
(2.22)
Since )(r is constant and )(~ ra and )(~ rf are functions of time only, Eq. 2.21is a first
order ordinary differential equation, and the solution may easily be found. In order to
show the effects of wind forcing on primary motions, let us further derive the
evolutionary equations for the modal energy and phase.Writing)(
)()( ~~ rirr eaa
= in Eq.
2.21, taking the temporal derivative on the LHS, multiplying by)(
)(~ rir ea
, separating
real and imaginary parts, and dividing the imaginary part by )(2 rE , we find the
evolutionary equations of modal energy and phase:
( ) ( )( )tWtE rrt)()( Re = (2.23)
( ) ( )( ) ( )tEtWt rrrrt)()()()( 2Im += (2.24)
where )(rW is the complex (in mathematical sense) rate of work done by the wind on the
rth mode
( ) ( ) ( ) ( ) ( )( ) ( )* ( ) ( )1 , , ,r r r r
sW t a t f t v x t x t = =
(2.25)
and )(1 rv
the average velocity in the upper layer induced by the rth mode. Eqs. 2.20 and
2.23-2.25provide a general framework for the effects of wind stress on each mode.
First, note that )(1rv
is a complex variable whose real and imaginary part that represents
the velocity field at the present time and a quarter period before the present time,
respectively (e.g., if the middle panel in Fig. 2.3a-d is assumed to represent the real part,
then right panel shows -1 times the imaginary part). If )(1rv
and s
are parallel
everywhere, )(rW is real and the wind excites (or cancels) the mode when they are in
8/2/2019 Thesis Kenji Shimizu
36/143
Application of modal analysis to strongly stratified lakes
16
the same (opposite) direction (Eqs. 2.23 and 2.25). On the other hand, when the upper
layer velocity and wind stress are normal to each other everywhere, s
and the
imaginary part of )(1rv
are in the same (opposite) direction (hence )(rW is imaginary)
and the wind accelerates (decelerates) the phase evolution (Eqs. 2.24 and 2.25).
It is worthy to note that the decoupling shown above is possible in a basin with
arbitrary bathymetry, once modes have been obtained either analytically or numerically.
Further, these results obtained for a two-layer basin hold in general, as shown in
Appendix 2.A.
2.4 Modal analysis of Lake Biwa2.4.1 Numerical method
To apply the modal analysis to irregularly shaped Lake Biwa, Eq. 2.7 was discretized
and solved numerically. A rectangular grid with horizontal spacing of approximately
460 m 570 m was used with surface and interface displacements defined in the
middle of each grid and velocity components defined on each face in the direction of the
velocity (staggered or Arakawa C-grid; see Fig. 2.1b). A finite difference method is
used for the discretization, and the Coriolis force term was discretized with the method
suggested by Platzman (1972) to keep the discretized operator K Hermitian, which was
important in order to retain the orthogonality and completeness of modes in the discrete
space. Based on the thermistor chain data collected during BITEX93 (Fig. 2.2), the
thermocline depth and density difference were set to 18 m and 2.27 kg m-3, respectively.
The phase of all the waves was arbitrarily set to zero when the total volume transport of
water in upper layer was from north to south.
Unlike previous studies (Buerle 1985; Lemmin et al. 2005), regions shallower thanthe thermocline were included in the calculation. Wherever the interface intersected the
bottom, the volume flux normal to the horizontal boundary in the lower layer was set to
zero (the boundary was assumed locally vertical; see Fig. 2.1c), and continuity of
displacements andvolume fluxes were applied to the upper layer. Since the method
assumes infinitely small amplitude, the boundary condition applied to the lower layer
was essentially same as the method used by Buerle (1985) and Lemmin et al. (2005),
who assumed a vertical wall along the line where the thermocline intersects the bottom
8/2/2019 Thesis Kenji Shimizu
37/143
Chapter 2. Horizontal structure and excitation of primary motions
17
and neglected the shallow coastal regions. Note that the inclusion of the shallow regions
did not affect the self-adjointness of K and properties of the associated modes (see
Appendix 2.A).
Table 2.1. Some characteristics of the internal waves and gyres in Lake Biwa. Some of thetopographic waves and surface waves (seiches) are also included to illustrate the spectrum of the
modes. The surface and internal waves are numbered in decreasing order of their natural periods,
while the geostrophic gyres are numbered in the opposite order. No number is assigned to
topographic waves.
Abbreviations are HM: horizontal mode, PE: percentage of the available potential energy to the
total energy, [ ]rE : mean modal total energy in the hydrodynamic simulation during BITEX 93, GS:
geostrophic gyre (calculated as Rossby wave in the upper layer), TW: topographic wave, IW:
(vertical mode 1) internal wave, SW: surface wave (seiche), CG: cyclonic gyre, AG: anticyclonic
gyre, CC: cyclonic cell, AC: anticyclonic cell, NL: nodal line, NB: North Basin, N: north, S: south,
and M: middle.
Inertial period is 20.7 h. Calculated as the ratio of sum of the first two terms in Eq. 2.15 to
sum of all the terms. # The sign [r] in the superscript indicates the sum of the conjugate pair, which
have positive and negative angular velocity with the same magnitude and the same modal structure.
References in the last column indicate the report of similar structure.
Data sources are 1) Endoh (1986), 2) Endoh and Okumura (1993), 3) Kumagai et al. (1998), 4)
Kanari (1975), 5) Saggio and Imberger (1998), 6) Endoh et al. (1995a), 7) Okamoto and Endoh
(1995), and 8) Kanari (1974). All data except 8) are based on field observation during summer,while 8) is based on a two layer model where the depths of the North and South Basin are taken as
50 m and 5 m, respectively.
Class HMPeriod
this study
Periodotherstudy
PE
(%)
[ ]rE#
(GJ)Horizontal structure
1 6.8 yr - 6.7 2.561 CG in N of NB, corresponding to the FirstGyre1,2,3
2 9.0 yr - 4.3 0.95 A pair of CG and AG in N of NB3 10.0 yr - 2.5 0.27 3 CGs in N and M of NB, and 1 AG in S of NB
GS
4 11.1 yr - 1.8 0.19 2 CGs and 3 AGs
- 4.97 yr - 0.2 0.04 1 gyre in NW coast of NBTW - 4.70 day -
8/2/2019 Thesis Kenji Shimizu
38/143
Application of modal analysis to strongly stratified lakes
18
Although the variation of the Coriolis parameter has, in general, a minor effect in
lakes of the size of Lake Biwa, it was nevertheless included in order to avoid
degeneracy of geostrophic modes in the numerical solution; the geostrophic gyres thus
appeared as Rossby waves. However, we prefer to call these modes geostrophic gyres
in this paper because they correspond to quasi-steady geostrophic circulation in
practical terms, as their periods (Table 2.1) are much longer than both the inertial period
and the estimated damping timescale of the gyres (10-20 d) (Endoh 1986).
2.4.2 Horizontal structure and excitation of internal wavesThe vertical mode 1, horizontal mode 1 (hereafter V1H1) internal wave was a Kelvin
wave that rotated cyclonically around the basin, the largest interface displacement
occurred at the northern and southern ends, and the water velocity was nearly parallel tothe thalweg(Fig. 2.3a). The V1H2 and V1H4 internal waves had two and three cells
where the crests and troughs of the interface rotated cyclonically. The particle orbits
were nearly parallel to the thalweg except the middle of the basin in V1H4, where the
velocity vectors appeared to rotate anticyclonically (Fig. 2.3b,c; note that velocity
vectors of a cyclonic wave of higher horizontal mode do not necessarily rotate in
cyclonic direction as seen in the analytical solution for a flat-bottomed circular basin;
e.g., Stocker and Imberger 2003). In V1H2, resonance in Shiozu Bay made the interface
displacement in the bay larger than in the main part of the lake. V1H3 had a similar
structure to V1H2 except that the phase of the motion was opposite in Shiozu Bay (not
shown). V1H6 was the lowest mode with an anticyclonic cell located in the middle of
the North Basin (Fig. 2.3d). Field data has shown an anticyclonic rotation of the current
vectors in the middle of the North Basin with a period of 11 h in summer ( Endoh et al.
1995a), confirming existence of this mode. Overall, the frequencies and horizontal
structure of these modes matched well with previous studies (Table 2.1).
The horizontal structure of the velocity in the upper layer determines the potential
magnitude of the excitation of internal waves under any given wind field (Eq. 2.25; the
evolution of internal waves and temporal variation of the wind must be taken into
account to evaluate the actual magnitude as indicated by Eq. 2.23). As an example, we
considered the effect of the asymmetric shape of the lake and wind directionunder
spatially uniform winds. A NE-SW wind favoured the V1H1 internal wave (Fig. 2.4)
because the velocity in the surface layer was approximately parallel to the thalweg (Fig.
8/2/2019 Thesis Kenji Shimizu
39/143
Chapter 2. Horizontal structure and excitation of primary motions
19
2.3a). On the other hand, WNW-ESE winds would excite V1H2 and V1H4 to a greater
extent than V1H1 (Fig. 2.4). The velocity pattern associated with V1H2 (Fig. 2.3b)
showed that the curvature of the thalweg made the WNW-ESE components of the upper
layer velocity in the two cells parallel and in the same direction, resulting in a large
value of )(rW . The velocity in the central and southern cells in V1H4 had a similar
magnitude but opposite direction (Fig. 2.3c), so the correlation between winds and
upper layer velocity in the northern cell determined the magnitude of excitation.
Excitation of V1H6 had less dependence on wind direction because the dominant
anticyclonic cell had a nearly circular particle orbit.
a) V1H1 b) V1H2
c) V1H4 d) V1H6
2 cm s-1
10 km
0 0.1 0.2 0.3 0.4 0.5 0.6
Amplitude (m)
0 0.2 0.4 0.6
Interface displacement (m)
-0.6 -0.4 -0.2
Fig. 2.3. Internal waves in Lake Biwa: (a) V1H1, (b) V1H2, (c) V1H4, and (d) V1H6. The middle
panels correspond to the phase where the rates of energy input ( ( ))(Re rW ) from spatially uniform
winds are the largest ( )(r = 30, 120, 115, 70,see Fig. 2.4), and the right panels correspond to a
quarter period after the left. Shading and vectors show the interface displacement and the average
velocity in the upper layer, respectively. In the smaller left panels, shading and lines respectively
show co-range contour and co-phase lines of wave trough with 45 interval. The co-phase lines with
triangles correspond to the phase shown in the middle figures, and the triangles show direction of
rotation. The modes are normalized to )(~ re = 2 GJ. Ellipses with dashed lines indicate cyclonic and
anticyclonic cells used to calculate the dispersion relationship (see Fig. 2.11).
8/2/2019 Thesis Kenji Shimizu
40/143
Application of modal analysis to strongly stratified lakes
20
0 90 180 270 3600
0.1
0.2
0.3
0.4
0.5
Wind direction (degrees)
Normaliz
edenergyinput(-) V1H1
V1H2V1H4V1H6
Fig. 2.4. Normalized maximum energy input from spatially uniform winds blowing from different
directions. Since energy input depends on the phase of the mode, the maximize energy input is
normalized by the norm of )(~ r and f (thus vertical axis corresponds to ( ) ( ) ( ) 1/ , ,r r rW M f M f ).
Wind direction is 0 when the wind is blowing from the north, and it is positive clockwise.
2.4.3 Spatial structure and excitation of gyresThe horizontal mode 1 geostrophic gyre existing in the upper layer (L1H1) had one
cell in the middle of the North Basin (Fig. 2.5a), corresponding to the First Gyre. L1H2
consisted of two counter-rotating gyres, and the superposition with L1H1 led to the
north-south migration of the First Gyre (Fig. 2.5a,b). L1H3 induced strong gyres in
south-central part of the North Basin (Fig. 2.5c), corresponding to the Second Gyre.
General characteristics of these modes, such as quasi-geostrophic circular currents in the
upper layer and an isostatic balance of the interface displacements, also agreed with the
field observations (Endoh 1986;Endoh et al. 1995a).
Geostrophic gyres in the lakes interior are excited only when wind stress curl is
non-zero. This follows directly from the vorticity equation, but may also be shown from
Eq. 2.25if we rewrite this equation in terms of the volume stream function for the upper
layer)(
1
r
:
)(1
11
)(1
rr hv =
(2.26)
that is valid when 1 1f
8/2/2019 Thesis Kenji Shimizu
41/143
Chapter 2. Horizontal structure and excitation of primary motions
21
Using the stream function and the boundary condition, Eq. 2.25 may be written as
( ) ))dAhdAhW srsrr
==
11
)(1
)(1
11
)(
(2.28)
Since the velocity induced by a geostrophic gyre exists in the lakes interior where 1h is
constant, the above equation shows that geostrophic gyres are excited only if wind stress
has a non-zero curl component. It also implies that the circulation pattern of geostrophic
gyres is a reflection of the wind stress curl field, since the horizontal structure of
geostrophic gyres is rather arbitrary (provided that Eqs. 2.9 and 2.10are satisfied) and
the correlation between the stream function and wind stress curl determines the
excitation (Eqs. 2.23 and 2.28).
a) L1H1 b) L1H2 c) L1H3
5 cm s-1
10 km
-0.3
0
0.3
Interfacedisplacement(m)
Fig. 2.5. Geostrophic gyres in Lake Biwa: (a) L1H1, (b) L1H2, and (c) L1H3. The panels show the
most frequently observed phase during days 24
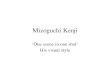
















![CrossMedia Language Inc. 2020...10 11 [Grammar] Understanding English Grammar with Four Simple Categories (4つのタイプ分けで英文法がわかる) Kenji Shimizu 240 pages](https://static.cupdf.com/doc/110x72/5ebb49580fa6354eb2689c2f/crossmedia-language-inc-2020-10-11-grammar-understanding-english-grammar.jpg)