



2.1 Sistem SCADA
2.1.1 Pengertian sistem SCADA
SCADA merupakan
Acquisition yang merupakan sebuah sistem yang dapat mengu
atau data dari lapangan dan kemudian mengirimkannya ke sebuah
pusat, dimana komputer pusat tersebut akan mengatur dan mengontrol
datatersebut. Sistem SCADA tidak hanya digunakan dalam proses pembangkitan
dan pendistribusian tenaga listrik tetapi siste
pada proses-proses perindustrian.
Sebuah sistem SCADA biasanya memiliki perangkat keras sinyal untuk
memperoleh dan mengirimkan
pengguna dalam bentuk
beberapa perangkat lunak pendukung. Semua itu menjadi satu sistem, istilah
SCADA merujuk pada sistem pusat keseluruhan. Sistem pusat ini biasanya
melakukan pemantauan
dari tempat-tempat yang lebih jauh lagi.
sistem SCADA ditunjukkan pada gambar 2.1.
5
BAB IILANDASAN TEORI
Sistem SCADA
istem SCADA
merupakan singkatan dari Supervisory Control and
yang merupakan sebuah sistem yang dapat mengumpulkan informasi
dari lapangan dan kemudian mengirimkannya ke sebuah
pusat, dimana komputer pusat tersebut akan mengatur dan mengontrol
tersebut. Sistem SCADA tidak hanya digunakan dalam proses pembangkitan
dan pendistribusian tenaga listrik tetapi sistem SCADA juga dapat digunakan
proses perindustrian.
Sebuah sistem SCADA biasanya memiliki perangkat keras sinyal untuk
memperoleh dan mengirimkan input/output, controller, jaringan, antarmuka
pengguna dalam bentuk Human Machine Interface (HMI), piranti komunikasi dan
beberapa perangkat lunak pendukung. Semua itu menjadi satu sistem, istilah
SCADA merujuk pada sistem pusat keseluruhan. Sistem pusat ini biasanya
melakukan pemantauan data dari berbagai macam sensor di lapangan atau bahkan
tempat yang lebih jauh lagi. Untuk lebih jelasnya, contoh model
sistem SCADA ditunjukkan pada gambar 2.1.
Gambar 2.1 Model Sistem SCADA
Supervisory Control and Data
mpulkan informasi
dari lapangan dan kemudian mengirimkannya ke sebuah unit prosesor
pusat, dimana komputer pusat tersebut akan mengatur dan mengontrol
tersebut. Sistem SCADA tidak hanya digunakan dalam proses pembangkitan
m SCADA juga dapat digunakan
Sebuah sistem SCADA biasanya memiliki perangkat keras sinyal untuk
, jaringan, antarmuka
), piranti komunikasi dan
beberapa perangkat lunak pendukung. Semua itu menjadi satu sistem, istilah
SCADA merujuk pada sistem pusat keseluruhan. Sistem pusat ini biasanya
dari berbagai macam sensor di lapangan atau bahkan
Untuk lebih jelasnya, contoh model

6
Sistem pemantauan dan kontrol industri biasanya terdiri dari sebuah host
pusat atau master yang biasa dinamakan sebagai master station, master terminal
unit (MTU), sedangkan satu atau lebih unit-unit pengumpul dan kontrol data
lapangan biasa dinamakan remote station, remoter terminal unit (RTU) dan
sekumpulan perangkat lunak standar yang digunakan untuk memantau dan
mengontrol elemen-elemen datadi lapangan. Sebagian besar sistem SCADA
banyak menggunakan komunikasi jarak jauh, walaupun demikian ada beberapa
elemen yang menggunakan komunikasi jarak dekat.
Dengan sistem SCADA maka dispatcher dapat mendapatkan data dengan
cepat setiap saat (real time) bila diperlukan, disamping itu SCADA dapat dengan
cepat memberikan peringatan pada dispatcher bila terjadi gangguan pada sistem,
sehingga gangguan dapat dengan mudah dan cepat diatasi/dinormalkan.
2.1.2 Bagian-bagian yang terdapat dalam sistem SCADA
Bagian yang terpenting pada sistem SCADA terdapat 3 bagian yaitu :
1).Master Terminal Unit (MTU)
MTU atau biasa yang disebut dengan master station, merupakan unit
komputer yang digunakan sebagai pengolah data pusat dari sistem
SCADA. Unit master ini menyediakan Human Machine Interface
(HMI) yang berfungsi sebagai perantara antara dispatcher dengan
sistem komputer.
2).Remote Terminal Unit (RTU)
RTU merupakan unit-unit komputer kecil yang dilengkapi dengan
sistem mandiri yang ditempatkan pada lokasi dan tempat-tempat
tertentu di lapangan. RTU bertindak sebagai pengumpul data lokal yang
didapatkan dari sensor-sensor dan mengirimkan perintah ke peralatan di
lapangan. Pada sistem tenaga listrik, RTU terletak pada Gardu Induk,
Gardu Distribusi, dan Gardu Hubung yang bertugas mengeksekusi
semua perintah dari MTU dan untuk mengetahui setiap kondisi
7
peralatan yang ada pada gardu melalui pengumpulan data besaran-
besaran listrik, status peralatan, dan sinyal alarm yang kemudian
diteruskan ke MTU melalui jaringan komunikasi data.
3).Media Komunikasi Data
Media Komunikasi yaitu perangkat/sarana fisik yang menghubungkan
antara pusat kontrol dengan RTU di gardu distribusi. Pengiriman data
dari pusat kontrol ke RTU atau sebaliknya dari RTU ke pusat kontrol.
Sistem komunikasi ini adalah bagaimana dua perangkat komputer di
pusat kontrol dan RTU dapat saling dihubungkan dan dapat saling
berkomunikasi satu dengan yang lainnya.
2.1.3 SCADA pada sistem tenaga listrik
Fasilitas SCADA diperlukan untuk melaksanakan pengusahaan tenaga
listrik terutama pengendalian operasi secara realtime. Suatu sistem SCADA terdiri
dari sejumlah RTU, sebuah Master Station / Region Control Center (RCC), dan
jaringan telekomunikasi data antara RTU dan Master Station. RTU dipasang di
setiap gardu induk atau pusat pembangkit yang hendak dipantau. RTU ini
bertugas untuk mengetahui setiap kondisi peralatan tegangan tinggi melalui
pengumpulan besaran-besaran listrik, status peralatan, dan sinyal alarm yang
kemudian diteruskan ke RCC melalui jaringan telekomunikasi data. RTU juga
dapat menerima dan melaksanakan perintah untuk merubah status peralatan
tegangan tinggi melalui sinyal-sinyal perintah yang dikirim dari RCC.
Dengan sistem SCADA maka dispatcher dapat mendapatkan data dengan
cepat setiap saat (realtime) bila diperlukan, disamping itu SCADA dapat dengan
cepat memberikan peringatan pada dispatcher bila terjadi gangguan pada sistem,
sehingga gangguan dapat dengan mudah dan cepat diatasi/dinormalkan. Data yang
dapat diamati berupa kondisi On/Off peralatan transmisi daya, kondisi sistem
SCADA sendiri, dan juga kondisi tegangan dan arus pada setiap bagian di
komponen transmisi. Setiap kondisi memiliki indikator berbeda, bahkan apabila

8
terdapat indikasi yang tidak valid maka dispatcher akan dapat megetahui dengan
mudah.
Fungsi kendali pengawasan mengacu pada operasi peralatan dari jarak
jauh, seperti switching circuit breaker, pengiriman sinyal balik untuk
menunjukkan atau mengindikasikan kalau operasi yang diinginkan telah berjalan
efektif. Sebagai contoh pengawasan dilakukan dengan menggunakan indikasi
lampu, jika lampu hijau menyala menunjukkan peralatan yang terbuka (open),
sedangkan lampu merah menunjukkan bahwa peralatan tertutup (close), atau
dapat menampilkan kondisi tidak valid yaitu kondisi yang tidak diketahui apakah
open atau close. Saat RTU melakukan operasi kendali seperti membuka circuit
breaker, perubahan dari lampu merah menjadi hijau pada pusat kendali
menunjukkan bahwa operasi berjalan dengan sukses.
Operasi pengawasan disini memakai metode pemindaian (scanning) secara
berurutan dari RTU-RTU yang terdapat pada gardu induk-gardu induk. Sistem ini
mampu mengontrol beberapa RTU dengan banyak peralatan pada tiap RTU hanya
dengan satu Master Station. Lebih lanjut, sistem ini juga mampu mengirim dari
jarak jauh datahasil pengukuran oleh RTU ke Master Station, seperti data analog
frekuensi, tegangan, daya dan besaran-besaran lain yang dibutuhkan untuk
keseluruhan operasi pengawasan .
Keuntungan sistem SCADA lainnya ialah kemampuan dalam membatasi
jumlah data yang ditransfer antar Master Station dan RTU. Hal ini dilakukan
melalui prosedur yang dikenal sebagai exception reporting dimana hanya data
tertentu yang dikirim pada saat data tersebut mengalami perubahan yang melebihi
batas setting. Master Station secara berurutan memindai (scanning) RTU-RTU
dengan mengirimkan pesan pendek pada tiap RTU untuk mengetahui jika RTU
mempunyai informasi yang perlu dilaporkan. Jika RTU mempunyai sesuatu yang
perlu dilaporkan, RTU akan mengirim pesan balik pada Master Station, dan data
akan diterima dan dimasukkan ke dalam memori komputer. Jika diperlukan, pesan
akan dicetak pada mesin printer di Master Station dan ditampilkan pada layar
monitor.

9
Selain dengan sistem pemindaian, pertukaran data juga dapat terjadi secara
incidental (segera setelah aksi manuver terjadi) misalnya terjadi penutupan switch
circuit breaker oleh operator gardu induk, maka RTU secara otomatis akan segera
mengirimkan status CB di gardu induk tersebut ke Master Station. Dispatcher
akan segera mengetahui bahwa CB telah tertutup.
Ketika operasi dilakukan dari Master Station, pertama yang dilakukan
adalah memastikan peralatan yang dipilih adalah tepat, kemudian diikuti dengan
pemilihan operasi yang akan dilakukan. Operator pada Master Station melakukan
tindakan tersebut berdasar pada prosedur yang disebut metode “select before
execute (SBXC)“, seperti berikut :
1).Dispatcher di Master Station memilih RTU.
2).Dispatcher memilih peralatan yang akan dioperasikan.
3).Dispatcher mengirim perintah.
4).RTU mengetahui peralatan yang hendak dioperasikan.
5).RTU melakukan operasi dan mengirim sinyal balik pada Master Station
ditunjukkan dengan perubahan warna pada layar monitor dan cetakan
pesan pada printer logging.
Prosedur diatas meminimalkan kemungkinan terjadinya kesalahan operasi.
Jika terjadi gangguan pada RTU, pesan akan dikirim dari RTU yang mengalami
gangguan tadi ke Master Station, dan pemindaian yang normal akan mengalami
penundaan yang cukup lama karena Master Station mendahulukan pesan
gangguan dan menyalakan alarm agar operator dapat mengambil tindakan yang
diperlukan secepatnya. Pada saat yang lain, pada kebanyakan kasus, status semua
peralatan pada RTU dapat dimonitor setiap 2 detik, memberikan informasi kondisi
sistem yang sedang terjadi pada operator di Pusat Kendali (RCC).
Hampir semua sistem kendali pengawasan modern berbasis pada
komputer, yang memungkinkan Master Station terdiri dari komputer digital
dengan peralatan masukan keluaran yang dibutuhkan untuk mengirimkan pesan-
pesan kendali ke RTU serta menerima informasi balik. Informasi yang diterima
akan ditampilkan pada layar LCD dan/atau dicetak pada printer sebagai
permanent records. LCD juga dapat menampilkan informasi grafis seperti

10
diagram satu garis. Pada pusat kendali (RCC), seluruh status sistem juga
ditampilkan pada Diagram Dinding (mimic board), yang memuat data mengenai
aliran daya pada kondisi saat itu dari RTU.
2.2 Komponen Peralatan Kontrol
2.2.1 Mikrokontroler
Mikrokontroler dapat dianalogikan dengan sebuah sistem komputer yang
dikemas dalam sebuah chip. Artinya, didalam sebuah IC mikrokontroler
sebenarnya sudah terdapat fasilitas seperti mikroprosesor, ROM, RAM, I/O dan
clock seperti halnya yang dimiliki oleh sebuah komputer PC. Namun karena
kemasannya yang sangat kecil yaitu berupa sebuah chip, maka spesifikasi dan
kemampuan yang dimiliki oleh mikrokontroler masih sangat rendah dibandingkan
dengan sistem komputer seperti PC, baik dilihat dari segi kecepatannya, muatan
memorinya, maupun fitur-fitur yang dimilikinya. Walaupun dari segi kemampuan
lebih rendah, mikrokontroler ini mempunyai kelebihan yaitu bentuknya yang kecil
sehingga membuat mikrokontroler ini menjadi fleksibel dan praktis digunakan
unuk sistem–sistem yang relatif tidak terlalu kompleks.
2.2.2 Mikrokontroler ATMega 128
Mikrokontroler ATmega 128 merupakan mikrokontroler keluarga AVR
yang mempunyai kapasitas flash memory 128KB. Alf and Vegard’s Risc
Processor (AVR) merupakan seri mikrokontroler CMOS 8-bit buatan Atmel,
berbasis arsitektur Reduced Instruction Set Computer (RISC). Secara umum,
AVR dapat terbagi menjadi 4 kelas, yaitu keluarga ATtiny, keluarga AT90Sxx,
keluarga ATMega, dan AT86RFxx. Pada dasarnya yang membedakan masing-
masing kelas adalah memori, peripheral dan fungsinya. Dari segi arsitektur dan
instruksi yang digunakan, bisa dikatakan hampir sama. Semua jenis AVR
dilengkapi dengan flash memori sebagai memori program. Kapasitas dari flash
memori ini berbeda antara chip yang satu dengan chip yang lain. Tergantung dari
jenis IC yang digunakan. Untuk flash memori yang paling kecil adalah 1 KB
(ATtiny11, ATtiny12, dan ATtiny15) dan paling besar adalah 128KB (AT-

11
Mega128). Untuk gambar chip mikrokontroler ATMega 128 terdapat pada
gambar 2.2.
Gambar 2.2 Chip Mikrokontroler ATMega 128
Mikrokontroler AVR ATMega128 memiliki spesifikasi sebagai berikut:
1). Saluran I/O sebanyak 56 buah, yaitu port A, port B, port C, port D, port
E, port F dan port G.
2). ADC 10 bit sebanyak 8 saluran.
3). 2 buah Timer/Counter 8 bit dan 2 buah Timer/Counter 16 bit.
4). Dua buah PWM 8 bit.
5). Watchdog Timer dengan osilator internal.
6). Internal SRAM sebesar 4 kbyte.
7). Memori flash sebesar 128 kBytes.
8). Interupsi eksternal.
9). Port antarmuka SPI.
10). EEPROM sebesar 4 KB.
11). Real time counter.
12). 2 buah Port USART untuk komunikasi serial.
13). Enam kanal PWM.
14). Tegangan operasi sekitar 4,5 V sampai dengan 5,5V.

12
Untuk gambar konfigurasi pin ATMega 128 terdapat pada gambar 2.3.
Gambar 2.3 Konfigurasi Pin ATMega 128
Secara umum ATMega 128 memiliki kesamaan dengan Mikrokontroler
lainnya, yaitu memiliki beberapa bagian yang secara arsitektural dapat
dilihat pada gambar 2.3. AVR menggunakan arsitektur harvard dengan
memori dari bus terpisah untuk program dan data. Ketika satu instruksi
dieksekusi, intruksi selanjutnya diambil daro memori program. Konsep ini
menghasilkan instruksi yang dapat dieksekusi setiap siklus clock. Konsep
file register dengan akses cepat terdiri dari 32 x 8 bit register. Kerja serba
guna dengan mengakses satu siklus clock, diartikan bahwa dalam satu siklus
clock, sebuah operasi ALU dapat dieksekusi. Dua buah operand dari file
register dioperasikan ALU kemudian disimpan kembali ke file register
hanya dalam satu siklus clock. Gambar 2.4 merupakan gambar Arsitektur
ATMega 128.

13
Gambar 2.4 Arsitektur ATMega 128
Enam dari 32 register dapat digunakan sebagai tiga buah 16-bit
register. Pointer alamat tidak langsung digunakan untuk pengalamatan
ruang data. Satu dari tiga pointer ini dapat digunakan sebagai pointer alamat
untuk look up tables di dalam memori program flash.
ALU mendukung operasi aritmatika dan logika diantara register
diantara konstanta dan sebuah register. Operasi register tunggal juga dapat
dieksekusi di dalam ALU. Setelah operasi aritmatika, register status
diperbaharui untuk memberikan informasi hasil operasi. Aliran program
dilakukan oleh lompatan conditional dan unconditional maupun instruksi
kolom. ALU mampu mengalamati secara langsung seluruh ruang alamat,
dimana instruksi AVR memiliki sebuah format 16-bit. Setiap alamat
memori program terdiri dari instruksi 16 atau 32 bit.
Modul interrupt memiliki register control di dalam ruang I/O dengan
tambahan bit global interrupt enable didalam register status. Setiap
interrupt memiliki interrupt vector yang terpisah didalam table interupsi
vector. Interrupt memiliki polaritas berhubungan dengan posis interrupt
vectornya. Semakin rendah alamat interrupt vector, semakin tinggi
polaritasnya. Ruang memori I/O terdiri dari 64 alamat untuk berfungsi

14
peripheral CPU sebagai control register, SPI dan fungsi I/O lainnya.
Memori I/O dapat diakses secara langsung atau sebagai ruang data di dalam
file register 0x20-0x5f. Berikut ini merupakan penjelasan dari beberapa
arsitektur dari AVR ATMega 128.
1). Aritmatics Logic Unit
Kemampuan tinggi AVR dioperasikan dalam kondisi langsung
dengan seluruh 32 register saja. Dalam siklus clock tunggal, operasi
aritmatika antara register kerja atau antara sebuah register dan sebuah
kata dapat dieksekusi. Operasi ALU dibagi ke dalam tiga kategori :
fungsi aritmatika, osilator, dan bit. Beberapa implementasi dari
arsitektur juga menghasilkan fungsi baik atau tidak.
2). Status Register
Status register berisi informasi tentang hasil intruksi aritmatika
terbaru yang dieksekusi. Informasi ini dapat digunakan untuk merubah
aliran program dalam rangkaian menjalankan operasi pengkondisian.
Status register diperbaharui setelah operasi ALU sehingga dalam
banyak kasus dapat menghilangkan penggunaan intruksi compare
sehingga menghasilkan kode yang lebih cepat. Gambar 2.5 merupakan
gambar dari status register.
Gambar 2.5 Status Register
Status register tidak disimpan secara otomatis ketika
memasuki rutin interrupt dan di kembalikan setelah kembali dari
sebelum interrupt. Proses ini harus dilakukan oleh software.
3). File General Purpose Register
Seluruh operasi instruksi pada file register memiliki hubungan
langsung ke seluruh register dan sebagian besarnya adalah intruksi

15
siklus tunggal. Gambar 2.5 menunjukan setiap register juga diberikan
alamat memori data. Register dipetakan langsung ke dalam 32 lokasi
dari ruang data pengguna, walaupun tidak dialokasikan secara fisik
sehingga lokasi SRAM tetap berfungsi sebagai pengorganisasian
memori. Hal ini menghasilkan fleksibelitas yang tinggi dalam
mengakses register. Gambar CPU AVR file general purpose register
terdapat pada gambar 2.6.
Gambar 2.6 CPU AVR File General Purpose Register
4). Stack Pointer
Stack digunakan untuk menyimpan data sementara, menyimpan
variable local, menyimpan alamat kembali setelah interrupt, dan
panggilan subroutien. Register stack pointer selalu menunjukkan
puncak dari stack – stack yang dijalankan dari lokasi memori tinggi ke
lokasi memori yang lebih rendah.
Stack pointer menyimpan data pada area tumpukan data SRAM dimana
tumpukan subroutine dan interrupt dialokasikan pada ruang stack didalam
SRAM. Data harus didefinisikan oleh program sebelum panggilan subroutine
dieksekusi atau interrupt diaktifkan. Stack pointer harus diset pada nilai diatas

16
ordo. Stack pointer dikurangi satu ketika data masukan ke dalam stack. Instruksi
PUSH dikurangi dua ketika alamat kembali dimasukan kedalam stack dengan
panggilan subroutine/interrupt. Stack pointer dinaikan satu ketika data diambil
satu dari stack dengan instruksi POP. Stack pointer dinaikan dua ketika data
kembali dikeluarkan dari stack dengan cara kembali dari panggilan subroutine
RET atau kembali dari interrupt RETI.
a). Stack pointer AVR diimplementasikan sehingga 2 register 8 bit dalam
ruang I/O. Gambar 2.7 merupakan gambar register stack pointer.
Gambar 2.7 Stack Pointer
5). Memori ATMega 128
Arsitektur AVR memiliki dua ruang memori utama yaitu memori data
dan memori program. Sehingga tambahan juga memiliki memori EEPROM
untuk menyimpan data. Berikut ini merupakan penjabaran dari memori yang
dimiliki oleh ATMega 128.
a). Memori Program Flash
ATMega 128 memiliki input sistem reprogrammable flash memori
untuk menyimpan program. Karena instruksi AVR memiliki lebar 16/32 bit,
maka flash diatur sehingga 4 K x 16, untuk keamanan software memori.
Program flash memori dibagi kedalam dua bagian yaitu bott program dan
bagian program aplikasi.
Memori flash memiliki ketahanan sampai 10000 kali tulis dan hapus.
Program counter PLAT memiliki 12 bit intuk mengamati sampai 4K lokasi
memori program. Gambar 2.8 merupakan gambar dari peta memori program
yang dimiliki oleh ATMega 128.

17
Gambar 2.8 Peta memori program
b). Memori Data SRAM
Gambar 2.8 menunjukan memori SRAM A7 diatur 608 lokasi
memori data mengalamati file register, gambar I/O dan 512 lokasi
berikutnya mengalamati data internal SRAM.
c). Memori Data EEPROM
ATMega 128 memiliki 512 Byte memori data EEPROM. Memori
tersebut diatur sehingga ruang data terpisah dan setiap byte tungal dapat
dibaca dan ditulis. EEPROM memiliki ketahanan sampai 100000 siklus
tuli/hapus.
2.2.2.1 Sistem minimum ATMega 128
Sistem minimum adalah rangkaian elektronika yang terdiri dari
komponen–komponen dasar yang dibutuhkan oleh suatu mikrokontroler untuk
dapat berfungsi dengan baik. Pada umumnya, suatu mikrokontroler membutuhkan
tiga elemen untu berfungsi yaitu power supply, kristal oscillator (XTAL), dan
Rangkaian RESET.

18
1). Power Supply
Catu daya merupakan nyawa bagi sismin ATMega 128. Tanpa catu
daya, komponen sismin ini tidak akan pernah berfungsi. Catu daya untuk
sismin ini adalah tegangan DC yang inputnya diberi 5 Volt DC. Untuk itu
tegangan AC 220 Volt harus ditransformasikan ke 12 Volt dan selanjutnya
di searahkan sehingga bisa menyuplai kebutuhan sismin ATMega 128.
2). Oscillator
Analogi fungsi kristal oscillator adalah jantung pada tubuh manusia,
perbedaan jantung memompa darah dan seluruh kandungannya sedangkan
XTAL memompa data. Kristal yang digunakan 16 MHz, lebih daro 0,9
MHz sehingga kapasitor yang dipasang masing – masing bernilai 22 pF.
Mode operasi kristal dapat dilihat pada tabel 2.1.
Tabel 2.1 Mode operasi Oscillator kristal
Gambar rangkaian kristal terdapat pada gambar 2.9.
Gambar 2.9 Rangkaian Kristal
Untuk kombinasi asinkron maka digunakan seting baudrate 9600 bps
karena kristal yang digunakan 16 MHz sehingga error yang terjadi hanya
0,2%.

19
3). Reset
Fungsi rangkaian Reset adalah untuk membuat mikrokontroler memulai
kembali pembacaan program, hal tersebut dibutuhkan pada saat
mikrokontroler mengalami gangguan dalam mengeksekusi program atau
bisa saja ketika ON, mikrokontroler mengalami error sehingga eksekusi
program tidak dimulai dari awal. Dengan reset berperan untuk
mengembalikan mikrokontroler untuk mengeksekusi program secara
berurutan yang dimulai dari awal.
2.3 Komunikasi Data
Komunikasi data adalah merupakan bagian dari telekomunikasi yang
secara khusus berkenaan dengan transmisi atau pemindahan data dan
informasi diantara komputer-komputer dan piranti-piranti yang lain dalam
bentuk digital yang dikirimkan melalui media komunikasi data. Data berarti
informasi yang disajikan oleh isyarat digital. Komunikasi data merupakan
bagian vital dari suatu masyarakat informasi karena sistem ini menyediakan
infrastruktur yang memungkinkan komputer-komputer dapat berkomunikasi
satu sama lain. Gambar 2.10 merupakan gambar dari dasar komunikasi data.
Gambar 2.10 Dasar Komunikasi Data
20
2.3.1 Komponen komunikasi data
Adapun komponen pembentuk arsitektur sistem komunikasi data antara lain :
1).Pengirim, adalah piranti yang mengirimkan data
2).Penerima, adalah piranti yang menerima data
3).Data, adalah informasi yang akan dipindahkan
4).Media pengiriman, adalah media atau saluran yang digunakan untuk
mengirimkan data
5).Protokol, adalah aturan-aturan yang berfungsi untuk menyelaraskan
hubungan.
2.3.2 Model komunikasi data
Berikut merupakan jenis–jenis model komunikasi data yang sering digunakan adalah :
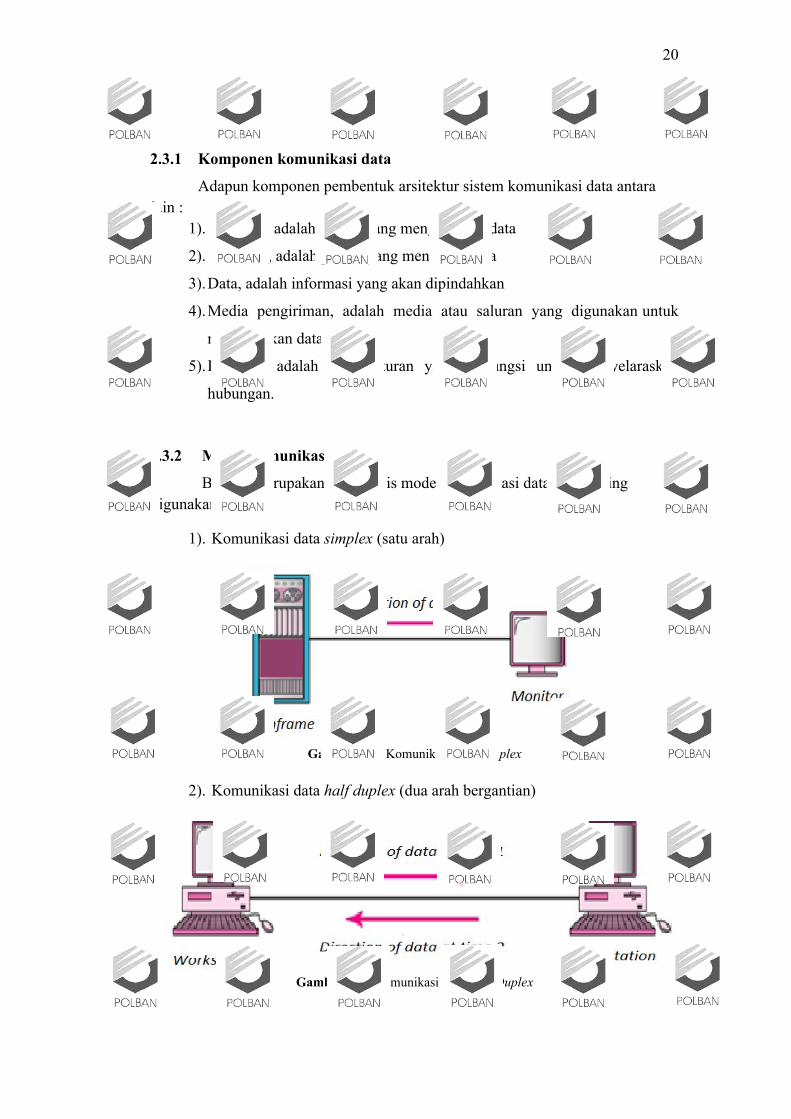
1). Komunikasi data simplex (satu arah)
Gambar 2.11 Komunikasi data Simplex
2). Komunikasi data half duplex (dua arah bergantian)
Gambar 2.12 Komunikasi data Half Duplex
21
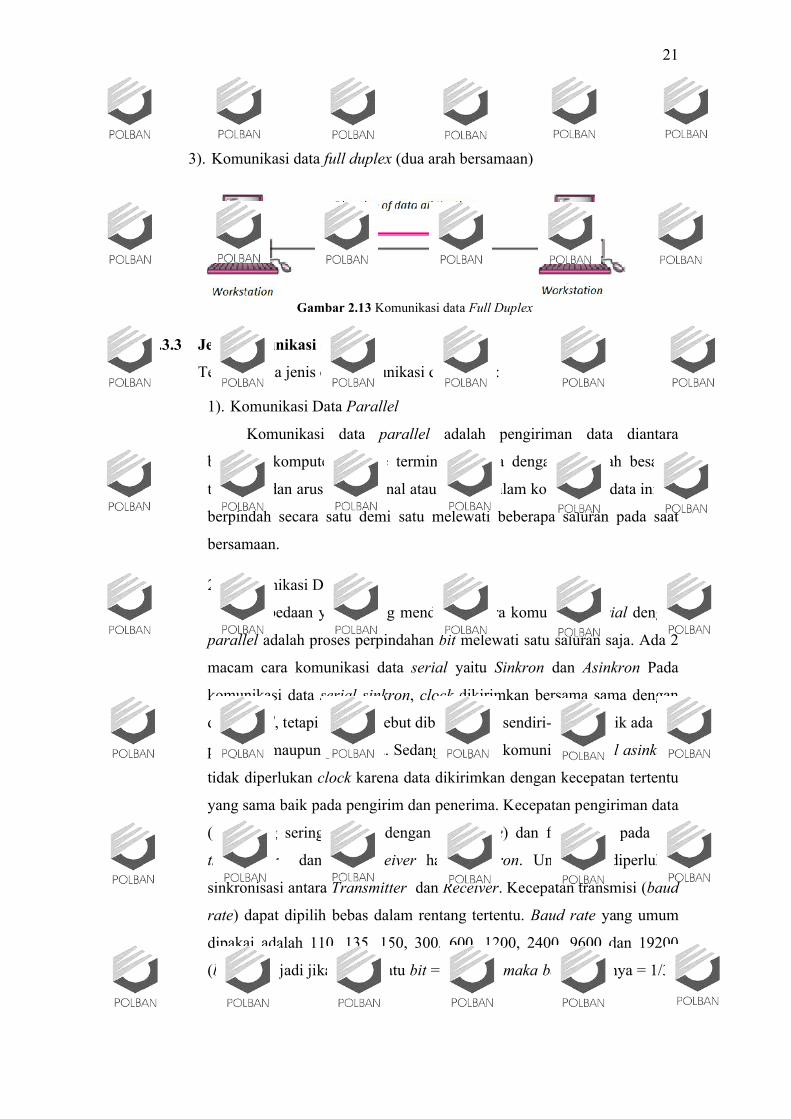
3). Komunikasi data full duplex (dua arah bersamaan)
Gambar 2.13 Komunikasi data Full Duplex
2.3.3 Jenis komunikasi data
Terdapat dua jenis cara komunikasi data yaitu :
1). Komunikasi Data Parallel
Komunikasi data parallel adalah pengiriman data diantara
beberapa komputer dan ke terminal lainnya dengan merubah besaran
tegangan dan arus dalam kanal atau kabel. Dalam komunikasi data ini bit
berpindah secara satu demi satu melewati beberapa saluran pada saat
bersamaan.
2). Komunikasi Data Serial
Perbedaan yang paling mendasar antara komunikasi serial dengan
parallel adalah proses perpindahan bit melewati satu saluran saja. Ada 2
macam cara komunikasi data serial yaitu Sinkron dan Asinkron Pada
komunikasi data serial sinkron, clock dikirimkan bersama sama dengan
data serial, tetapi clock tersebut dibangkitkan sendiri-sendiri baik ada sisi
pengirim maupun penerima. Sedangkan pada komunikasi serial asinkron
tidak diperlukan clock karena data dikirimkan dengan kecepatan tertentu
yang sama baik pada pengirim dan penerima. Kecepatan pengiriman data
(atau yang sering disebut dengan baud rate) dan fasa clock pada sisi
transmitter dan sisi receiver harus sinkron. Untuk itu diperlukan
sinkronisasi antara Transmitter dan Receiver. Kecepatan transmisi (baud
rate) dapat dipilih bebas dalam rentang tertentu. Baud rate yang umum
dipakai adalah 110, 135, 150, 300, 600, 1200, 2400, 9600 dan 19200
(bit/detik), jadi jika waktu satu bit = 3,33 ms, maka baud rate-nya = 1/33

22
ms atau 300 baud. Dalam komunikasi data serial, baud rate dari kedua
alat yang berhubungan harus diatur pada kecepatan yang sama.
Selanjutnya harus ditentukan panjang data (6,7 atau 8 bit), paritas (genap,
ganjil, atau tanpa paritas), dan jumlah stop bit (1, 1 ½ , atau 2 bit).
2.3.4 Transmisi asynchronous dan synchronous
Data ditransfer melalui path komunikasi tunggal pada transmisi data
secara serial dimana tiap elemen pensinyalan dapat berupa :
1). Kurang dari 1 bit : misalnya dengan pengkodean Manchester
2). 1 bit : NRZ-L dan FSK adalah contoh-contoh analog dan digital
3). Lebih dari 1 bit : QPSK sebagai contohnya.
Dalam bahasan ini, kita menganggap satu bit per elemen pensinyalan kecuali jika
keadaan sebaliknya.
Sinkronisasi adalah salah satu tugas utama dari komunikasi data. Suatu
transmitter mengirim message 1 bit pada suatu waktu melalui suatu medium ke
receiver. Receiver arus mengenal awal dan akhir dari blok-blok bit dan juga harus
mengetahui durasi dari tiap bit sehingga dapat men-sampel line tersebut dengan
timing yang tepat untuk membaca tiap bit. Misalkan pengirim (sender)
mentransmisi sejumlah bit-bit data. Pengirim mempunyai suatu clock yang
mempengaruhi timing dari transmisi bit-bit. Sebagai contoh, jika data ditransmisi
dengan 10000 bits per second (bps), kemudian 1 bit akan ditransmisi setiap
1/10000 = 0,1 millisecond (ms), sebagai yang diukur oleh clock pengirim. Maka,
receiver akan menentukan waktu yang cocok untuk sampel-sampelnya pada
interval dari 1 bit time. Pada contoh ini, pen-sampling-an akan terjadi sekali setiap
0,1 ms. Jika waktu pen-sampling-an berdasarkan pada clocknya sendiri, maka
akan timbul masalah jika clock-clock transmitter dan reciver tidak disamakan
dengan tepat. Jika ada perbedaan 1 persen (clock receiver 1 persen lebih cepat
atau lebih lambat daripada clock transmitter ), maka pen-sampling-an pertama
0,001 ms meleset dari tengah bit (tengah bit adalah 0,05 ms dari awal dan akhir
bit). Setelah sampel-sampel mencapai 50 atau lebih, receiver akan error karena
pen-sampling-annya dalam bit time yang salah (50 x 0,001 = 0,05 ms). Untuk

23
perbedaan timing yang kecil, error akan terjadi kemudian, tetapi kemudian
receiver akan keluar dari step transmitter jika transmitter mengirim aliran bit
yang panjang dan jika tidak ada langkah-langkah yang mensinkronkan transmitter
dan receiver.
2.3.4.1 Transmisi asynchronous
Strategi dari metode ini yaitu mencegah problem timing dengan tidak
mengirim aliran bit panjang yang tidak putus -putusnya. Melainkan data
ditransmisi per karakter pada suatu waktu, dimana tiap karakter adalah 5 sampai 8
bit panjangnya. Timing atau sinkronisasi harus dipertahankan antara tiap karakter;
receiver mempunyai kesempatan untuk mensinkronkan awal dari tiap karakter
baru. Gambar 2.14 merupakan gambar dari teknik asynchronous.
Gambar 2.14 Teknik Asynchronous
Gambar 2.14a, ketika tidak ada transmisi karakter, line antara transmitter dan
receiver dalam keadaan "idle". Idle adalah ekuivalen untuk elemen pensinyalan
bagi binary '1'.

24
Awal dari suatu karakter diisyaratkan oleh suatu start bit dengan binary '0'.
Kemudian diikuti oleh 5 sampai 8 bit yang membentuk karakter tersebut. Bit-bit
dari karakter itu ditransmisi dengan diawali least significant bit (LSB). Biasanya,
bit-bit karakter ini diikuti oleh suatu parity bit yang berada pada posisi most-
significant-bit (MSB).
Parity bit tersebut diset oleh transmitter sedemikian seperti total jumlah
binary '1' dalam karakter; termasuk parity bit-nya, adalah genap (even parity) atau
ganjil (odd parity), tergantung pada konversi yang dipakai. Elemen terakhir yaitu
stop, yang merupakan suatu binary '1'. Panjang minimum dari stop biasanya 1;1,5
atau 2 kali durasi dari bit. Sedangkan maksimumnya tidak dispesifikasikan.
Karena stop sama dengan kondisi idle, maka transmitter akan melanjutkan
transmisi sinyal stop sampai siap untuk mengirim karakter berikutnya.
Gambar 2.14c memperlihatkan efek timing error yang menyebabkan error
pada penerimaan. Disini dianggap bahwa data ratenya 10000 bps; oleh karena itu
tiap bit mempunyai durasi 0,1 ms atau 100 s. Anggaplah receiver terlambat 7
persen atau 7 s per bit time. Dengan demikian receiver men-sampel karakter yang
masuk setiap 93 s (berdasarkan pada clock transmitter ). Seperti terlihat, sampel
terakhir mengalami error. Sebenarnya error ini menghasilkan dua macam error :
pertama, sampel bit terakhir diterima tidak tepat; kedua, perhitungan bit sekarang
keluar dari kesepakatan. Jika bit ke 7 adalah 1 dan bit ke 8 adalah 0 maka bit 8
akan dianggap suatu start bit. Kondisi ini diistilahkan framing error, yaitu
karakter plus start dan stop bit yang kadang-kadang dinyatakan suatu Frame.
Framing error juga jika beberapa kondisi noise menyebabkan munculnya
kesalahan dari suatu start bit selama kondisi idle.
Komunikasi asynchronous adalah sederhana dan murah tetapi memerlukan
tambahan 2 sampai 3 bit per karakter untuk sinkronisasi. Persentase tambahan
dapat dikurangi dengan mengirim blok-blok bit yang besar antara start dan stop
bit, tetapi akan memperbesar kumulatif timing error. Solusinya yaitu transmisi
synchronous.
25
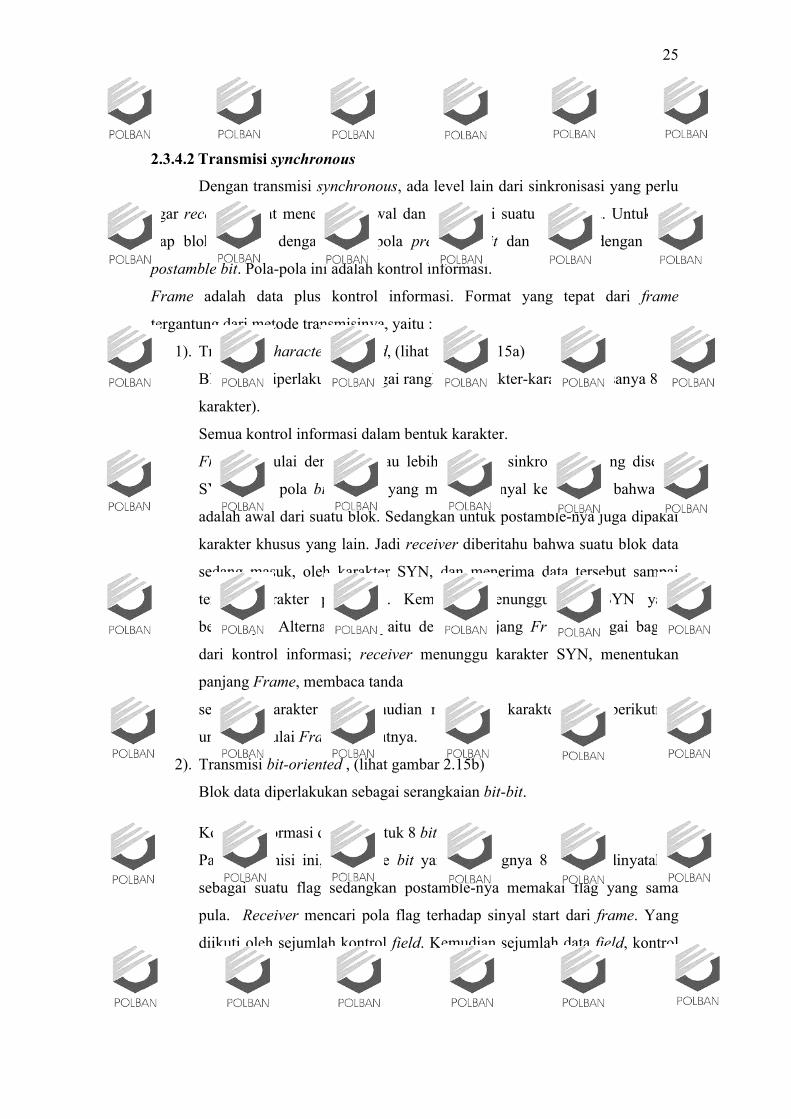
2.3.4.2 Transmisi synchronous
Dengan transmisi synchronous, ada level lain dari sinkronisasi yang perlu
agar receiver dapat menentukan awal dan akhir dari suatu blok data. Untuk itu,
tiap blok dimulai dengan suatu pola preamble bit dan diakhiri dengan pola
postamble bit. Pola-pola ini adalah kontrol informasi.
Frame adalah data plus kontrol informasi. Format yang tepat dari frame
tergantung dari metode transmisinya, yaitu :
1). Transmisi character-oriented, (lihat gambar 2.15a)
Blok data diperlakukan sebagai rangkaian karakter-karakter (biasanya 8 bit
karakter).
Semua kontrol informasi dalam bentuk karakter.
Frame dimulai dengan 1 atau lebih 'karakter sinkronisasi' yang disebut
SYN, yaitu pola bit khusus yang memberi sinyal ke receiver bahwa ini
adalah awal dari suatu blok. Sedangkan untuk postamble-nya juga dipakai
karakter khusus yang lain. Jadi receiver diberitahu bahwa suatu blok data
sedang masuk, oleh karakter SYN, dan menerima data tersebut sampai
terlihat karakter postamble. Kemudian menunggu pola SYN yang
berikutnya. Alternatif lain yaitu dengan panjang Frame sebagai bagian
dari kontrol informasi; receiver menunggu karakter SYN, menentukan
panjang Frame, membaca tanda
sejumlah karakter dan kemudian menunggu karakter SYN berikutnya
untuk memulai Frame berikutnya.
2). Transmisi bit-oriented , (lihat gambar 2.15b)
Blok data diperlakukan sebagai serangkaian bit-bit.
Kontrol informasi dalam bentuk 8 bit karakter.
Pada transmisi ini, preamble bit yang panjangnya 8 bit dan dinyatakan
sebagai suatu flag sedangkan postamble-nya memakai flag yang sama
pula. Receiver mencari pola flag terhadap sinyal start dari frame. Yang
diikuti oleh sejumlah kontrol field. Kemudian sejumlah data field, kontrol

26
field dan akhirnya flag-nya diulangi. Perbedaan dari kedua metode diatas
terletak pada format detilnya dan kontrol informasinya.
Keuntungan transmisi synchronous :
1). Efisien dalam ukuran blok data; transmisi asynchronous memerlukan 20%
atau lebih tambahan ukuran.
2). Kontrol informasi kurang dari 100 bit.
Gambar 2.15 Teknik Synchronous
2.4 Protokol
Protokol adalah sebuah aturan yang mendefinisikan beberapa fungsi yang
ada dalam sebuah jaringan komputer, misalnya mengirim pesan, data, informasi
dan fungsi lain yang harus dipenuhi oleh sisi pengirim dan sisi penerima agar
komunikasi dapat berlangsung dengan benar, walaupun sistem yang ada dalam
jaringan tersebut berbeda sama sekali. Protokol ini mengurusi perbedaan format
data pada kedua sistem hingga pada masalah koneksi listrik. Standar protokol
yang terkenal yaitu Open System Interconnecting (OSI) yang ditentukan oleh
International Standart Organization (ISO).
Adapun komponen protokol adalah sebagai berikut :
1). Aturan atau prosedur
- Mengatur pembentukan/pemutusan hubungan
- Mengatur proses transfer data.
2). Format atau bentuk representasi pesan
27
3). Kosakata (vocabulary) jenis pesan dan makna masing-masing pesan.
Secara umum fungsi dari protokol adalah untuk menghubungkan sisi
pengirim dan sisi penerima dalam berkomunikasi serta dalam bertukar informasi
agar dapat berjalan dengan baik dan benar. Sedangkan fungsi protokol secara
detail dapat dijelaskan, sebagai berikut:
1). Fragmentasi dan reassembly
Fungsi dari fragmentasi dan reasembly adalah membagi informasi
yang dikirim menjadi beberapa paket data pada saat sisi pengirim
mengirimkan informasi dan setelah diterima maka sisi penerima
akan menggabungkan lagi menjadi paket informasi yang lengkap.
2). Encaptulation
Fungsi dari encaptulation adalah melengkapi informasi yang
dikirimkan dengan address, kode-kode koreksi dan lain-lain.
3). Connection control
Fungsi dari connection control adalah membangun hubungan
(connection) komunikasi dari sisi pengirim dan sisi penerima,
dimana dalam membangun hubungan ini juga termasuk dalam hal
pengiriman data dan mengakhiri hubungan.
4). Flow control
Berfungsi sebagai pengatur perjalanan datadari sisi pengirim ke sisi
penerima.
5). Error control
Dalam pengiriman data tak lepas dari kesalahan, baik itu dalam
proses pengiriman maupun pada waktu data itu diterima. Fungsi dari
error control adalah mengontrol terjadinya kesalahan yang terjadi
pada waktu data dikirimkan.
6). Transmission service
Fungsi dari transmission service adalah memberi pelayanan
komunikasi data khususnya yang berkaitan dengan prioritas dan
keamanan serta perlindungan data.

28
2.5 Recommended Standard 485
2.5.1 Recommended standard 485
Recommended Standard 485 (RS-485) adalah standar komunikasi yang
paling serbaguna dalam seri standar yang ditentukan oleh EIA. Itu sebabnya RS-
485 saat ini digunakan secara luas antarmuka komunikasi data akuisisi dan
kontrol aplikasi di mana beberapa node berkomunikasi satu sama lain.
Komunikasi RS-485 bisa mencapai jarak maksimal 4000 kaki, atau setara dengan
1,2 Km. Selain itu RS-485 merupakan standar komunikasi serial asynchronous
yang menyediakan kemampuan komunikasi, seperti kontrol aliran perangkat
keras, kontrol aliran perangkat lunak, dan paritas cek. Telah banyak digunakan
selama beberapa dekade. Gambar konfigurasi IC MAX485 terdapat pada gambar
2.16 dan gambar konfigurasi komunikasi RS-485 terdapat pada gambar 2.17.
Gambar 2.16 Konfigurasi IC MAX485
29
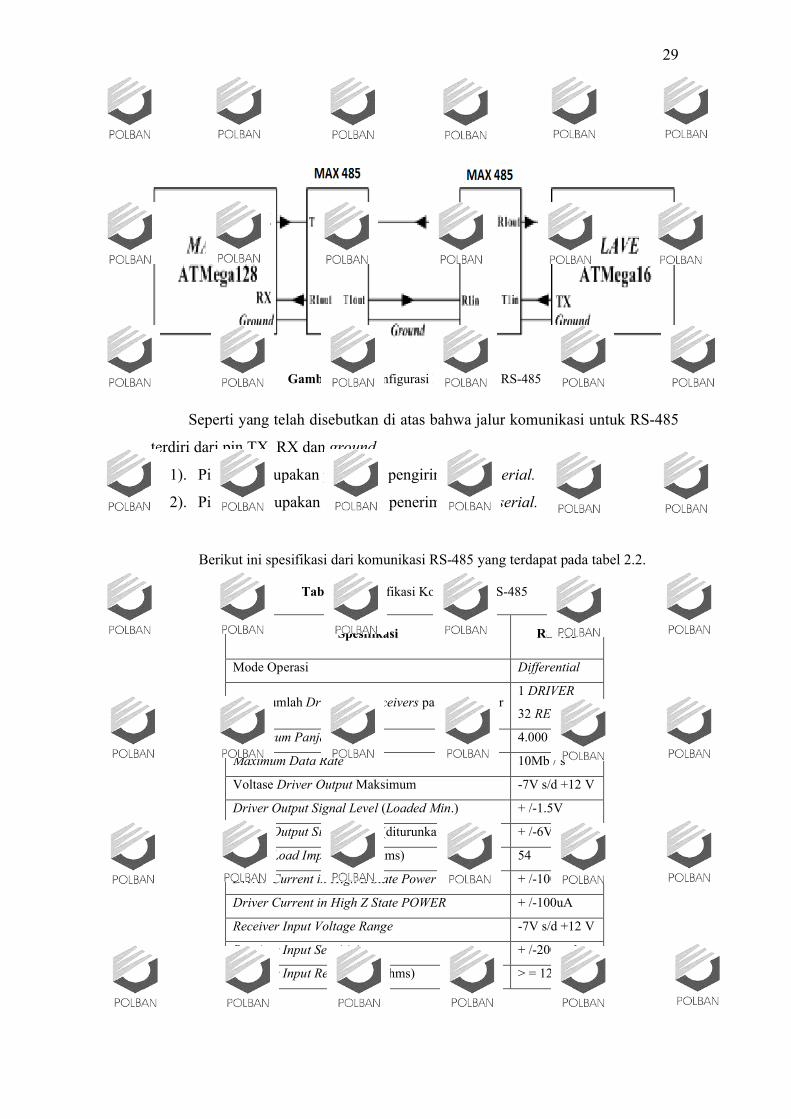
Gambar 2.17 Konfigurasi Komunikasi RS-485
Seperti yang telah disebutkan di atas bahwa jalur komunikasi untuk RS-485
terdiri dari pin TX, RX dan ground.
1). Pin TX merupakan pin untuk pengiriman data serial.
2). Pin RX merupakan pin untuk penerimaan data serial.
Berikut ini spesifikasi dari komunikasi RS-485 yang terdapat pada tabel 2.2.
Tabel 2.2 Spesifikasi Komunikasi RS-485
Spesifikasi RS-485
Mode Operasi Differential
Total Jumlah Driver dan Receivers pada Satu Jalur1 DRIVER
32 RECEIVER
Maksimum Panjang Kabel 4.000 FT.
Maximum Data Rate 10Mb / s
Voltase Driver Output Maksimum -7V s/d +12 V
Driver Output Signal Level (Loaded Min.) + /-1.5V
Driver Output Signal Level (diturunkan Max) + /-6V
Driver Load Impedance (Ohms) 54
Driver Current in High Z State Power On + /-100uA
Driver Current in High Z State POWER + /-100uA
Receiver Input Voltage Range -7V s/d +12 V
Receiver Input Sensitivity + /-200mV
Receiver Input Resistance (Ohms) > = 12k

2.5.2 Topologi jaringan RS
Topologi jaringan merupakan alasan mengapa
favorit dari empat interface
adalah satu-satunya dari
pemancar dan penerima dalam jaringan ya
RS-485 receiver dengan resistansi masukan dari 120 Ω adalah mungkin untuk
menghubungkan 32 perangkat ke jaringan.
untuk meningkatkan jumlah
kilometer. Ini adalah alasan mengapa
PLC, microcontroller
topologi jaringan RS-
Dalam gambar di atas merupakan topologi jaringan umum terhubung dalam jaringan
1). Single Twisted Pair
Dalam versi ini, semua perangkat yang terhubung ke satu
Pair. Dengan demikian, semuanya harus memiliki driver dengan
output
satu baris di kedua arah
pemancaran perangkat sekaligus (masalah perangkat lunak).
2). Double Tw
Jika menggunakan jenis ini tidak perlu menggunakan output
state, karena perangkat
kedua, yang dimaksudkan untuk mengirim data dari
aringan RS-485
Topologi jaringan merupakan alasan mengapa RS-485
interface dalam akuisisi data dan kontrol aplikasi.
satunya dari interface internet working yang mampu bekerja pada
pemancar dan penerima dalam jaringan yang sama. Bila menggunakan standar
dengan resistansi masukan dari 120 Ω adalah mungkin untuk
menghubungkan 32 perangkat ke jaringan. RS-485 repeater juga memungkinkan
untuk meningkatkan jumlah node menjadi beberapa ribu, dalam beberapa
eter. Ini adalah alasan mengapa RS-485 ini begitu populer dengan komputer,
microcontroller dan sensor cerdas dalam aplikasi ilmiah dan teknis.
-485 terdapat pada gambar 2.18.
Gambar 2.18 Topologi jaringan RS-485
Dalam gambar di atas merupakan topologi jaringan umum terhubung dalam jaringan RS-485 multipoint.
Single Twisted Pair RS-485
Dalam versi ini, semua perangkat yang terhubung ke satu
. Dengan demikian, semuanya harus memiliki driver dengan
output tri-state (termasuk Master). Komunikasi berjalan di atas
satu baris di kedua arah. Penting untuk mencegah lebih banyak dari
pemancaran perangkat sekaligus (masalah perangkat lunak).
Double Twisted Pair RS-485
Jika menggunakan jenis ini tidak perlu menggunakan output
, karena perangkat slave mengirim lebih dari twisted pair
kedua, yang dimaksudkan untuk mengirim data dari
30
485 kini menjadi
dalam akuisisi data dan kontrol aplikasi. RS-485
yang mampu bekerja pada
ng sama. Bila menggunakan standar
dengan resistansi masukan dari 120 Ω adalah mungkin untuk
juga memungkinkan
menjadi beberapa ribu, dalam beberapa
ini begitu populer dengan komputer,
dan sensor cerdas dalam aplikasi ilmiah dan teknis. Gambar
Dalam gambar di atas merupakan topologi jaringan umum RS-485 yang
Dalam versi ini, semua perangkat yang terhubung ke satu Twisted
. Dengan demikian, semuanya harus memiliki driver dengan
). Komunikasi berjalan di atas
Penting untuk mencegah lebih banyak dari
pemancaran perangkat sekaligus (masalah perangkat lunak).
Jika menggunakan jenis ini tidak perlu menggunakan output tri-
twisted pair yang
kedua, yang dimaksudkan untuk mengirim data dari Slave ke

31
Master. Solusi ini sering memungkinkan pelaksanaan dalam sistem
komunikasi multipoint, yang pada awalnya dirancang (HW dan
juga SW) untuk RS-232. Tentu saja, master perangkat lunak harus
dimodifikasi, sehingga master query secara periodik mengirim
paket ke semua perangkat slave. Peningkatan throughput data yang
jelas dalam volume besar. Kadang-kadang sistem RS-485 dapat
dilihat dalam sistem poin-to-sistem poin.
2.6 Radio Modem
Radio modem merupakan suatu media komunikasi data. Komunikasi radio
merupakan suatu bentuk komunikasi modern yang memanfaatkan gelombang
radio sebagai sarana untuk membawa suatu pesan atau data sampai ke tempat
penerima. Kualitas penerimaan sinyal radio berasal dari besarnya daya yang
diterima oleh antena receiver. Jauh dekatnya jarak penerimaan sinyal menentukan
frekuensi band seperti Very High Frequency (VHF) atau Ultra High Frequency
(UHF).
Secara umum dapat dijelaskan bahwa pada komunikasi data melalui radio
ini memiliki dua bagian utama, yaitu :
1). Bagian Pemodulasi, yaitu bagian yang digunakan untuk memberikan
modulasi pada sinyal digital agar dapat dikirim melalui radio.
2). Bagian Pembawa Modulasi, yaitu bagian yang mengirimkan data yang
telah dimodulasi ke tempat lain.
Dalam sistem pengendalian tenaga listrik penggunaan radio modem akan sangat
berguna apabila digunakan untuk sistem komunikasi antara terminal-terminal
yang tersebar luas pada jarak 100 sampai 200 km. Bahkan dengan menempatkan
statision pengulang (repeater) secara tepat jarak komunikasi dapat diperluas pada
jangkauan yang lebih jauh.
2.6.1 Frequency shift keying
Frequency shift Keying (FSK) adalah suatu metoda pengiriman sinyal
secara digital. Dua keadaan biner, logik 0 (low) dan logik 1 (high)
direpresentasikan kedalam bentuk gelombang analog. Logik 0 direperesentasikan

32
oleh gelombang pada frekuensi tertentu dan logik 1 direpresentasikan oleh
gelombang pada frekuensi tertentu yang berbeda dengan keadaan pada logika 0.
Modem berfungsi untuk mengubah data biner dari komputer ke FSK untuk
tranmisi melalui saluran telepon, kabel, optical fiber, atau media wireless. Modem
juga dapat berfungsi untuk mengubah sinyal FSK yang diterima oleh penerima ke
dalam bentuk digital low dan high yang dapat dimengerti oleh komputer.
1). Modulator FSK
Modulasi adalah proses menumpangkan sinyal informasi pada sinyal lain
yang memiliki frekuensi lebih besar. Proses modulasi dilakukan untuk
memudahkan proses transmisi, sehingga didapat efisiensi perangkat transmisi
serta jarak jangkauannya juga akan lebih jauh. Modulasi terdiri atas dua macam,
yaitu modulasi sinyal analog dan modulasi sinyal digital. Modulasi analog adalah,
menumpangkan sinyal informasi dalam bentuk analog kedalam sinyal pembawa
yang juga dalam bentuk sinyal analog. Contohnya modulasi FM. Sedangkan
modulasi digital adalah menumpangkan sinyal informasi dalam bentuk digital
kedalam sinyal pembawa yang dalam bentuk sinyal analog. Contohnya adalah
modulasi FSK Contoh aplikasi modulasi adalah modem (modulator/demodulator)
untuk mengirimkan sinyal digital dari komputer melalui media gelombang radio
yang hanya dapat dilewati oleh sinyal analog.
2). Demodulator FSK
Fungsi demodulator FSK adalah untuk mengubah sinyal analog kedalam
sinyal digital yang berasal dari Radio Transceiver sebelum masuk ke Port Serial
Komputer. Prosesnya disebut demodulasi. Deteksi sinyal FSK biasa menggunakan
PLL (phase looked loop). PLL merupakan rangkaian osilator yang terkontrol,
dalam hal ini yang terkontrol adalah pada bagian keluaran yang berupa frekuensi,
sehinga dengan menggunakan PLL ini frekuensi keluaran menjadi konstan.
2.6.2 YS 1020 UB RF data transceiver
Pada proyek akhir ini media komunikasi melalui radio modem
menggunakan hardware modem YS1020 UB yang merupakan modul RF yang
dirancang untuk sistem transmisi data UART dalam jarak dekat. Modul RF ini

33
dapat mengirimkan dan menerima data serial melalui media udara, dengan
frekuensi 433MHz ISM band dan baud rate sebesar 9600 bps.
Fitur Utama :
1). Carrier frequency : 433/450/868/915 MHz
2). Interface : RS-232/RS-485/ TTL
3). Baud rate : 1200/2400/4800/9600/38400 bps
4). Half duplex
5). Interface formate : 8N1/8E1/801
6). Modulation : GFSK
Gambar modul RF YS 1020 UB terdapat pada gambar 2.19.
Gambar 2.19 Modul RF YS 1020 UB
Gambar dimensi instalasi terdapat pada gambar 2.20.
Gambar 2.20 Dimensi Instalasi
34
2.7 Recommended Standard 232
2.7.1 Recommended standard 232 (RS-232)
RS-232 merupakan metoda dan standar transmisi serial yang ditetapkan
Electical Industri Association (EIA) yang dapat digunakan sebagai aturan dalam
pertukaran data antar komputer. Standar RS-232 mempunyai beberapa
karakteristik sinyal listrik, yaitu:
1). Keadaan logic high (mark) ditandai dengan tegangan yang lebih negatif
dari -3 volt. Pada logic high besarnya tegangan harus antara -5 V dan -15
V.
2). Keadaan logic low (space) ditandai dengan tegangan yang lebih positif
dari +3 volt. Pada logic low besarnya tegangan harus antara +5 V dan
+15 V.
Jadi, sinyal maksimum RS232 terlalu tinggi untuk Mikrokontroler, begitu
juga untuk sinyal negatif RS232 tidak dapat terdeteksi sama sekali dengan logika
Mikrokontroler. Oleh karena itu, untuk menerima data serial dari antarmuka
tegangan RS232, tegangan harus disesuaikan dengan tegangan input dan output
mikrokontroler. Max232 adalah driver yang digunakan sebagai pengirim dan
penerima sinyal dari RS232. Max232 dapat menyesuaikan level tegangan dari
RS232 untuk selanjutnya diterima oleh mikrokontroler. Dengan kata lain, Max232
dapat mengkonversi tegangan dari RS232 menjadi sinyal logika yang dapat dibaca
oleh Mikrokontroler. Max232 maksimal dapat mengirim data pada jarak kurang
dari 15 m (sumber dari DataSheet Texas Instruments). Gambar konfigurasi
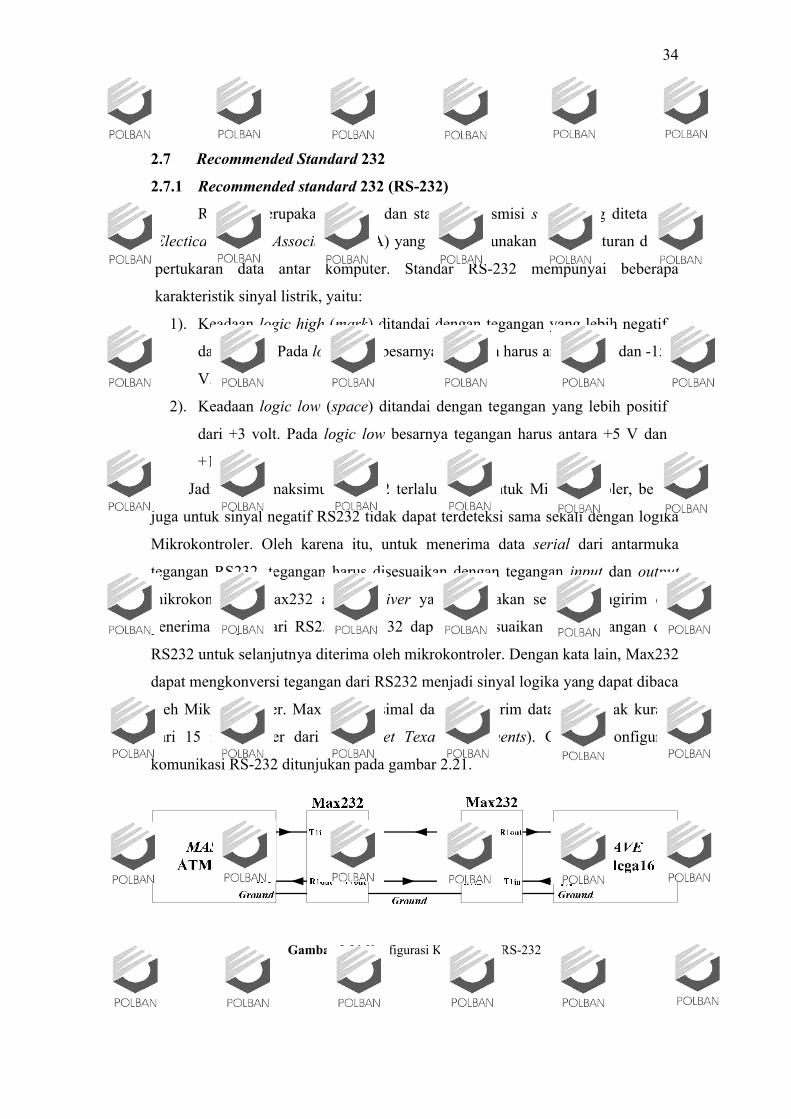
komunikasi RS-232 ditunjukan pada gambar 2.21.
Gambar 2.21 Konfigurasi Komunikasi RS-232

35
Seperti yang telah disebutkan di atas bahwa jalur komunikasi untuk RS-232
terdiri dari pin TX, RX dan ground.
1). Pin TX merupakan pin untuk pengiriman data serial.
2). Pin RX merupakan pin untuk penerimaan data serial.
2.7.2 Operasi kerja RS-232 dan transmisi data
Rangkaian komunikasi serial RS-232 membutuhkan sebuah IC tambahan
Max232 yaitu suatu piranti yang digunakan untuk mengubah atau lebih tepatnya
mengkonversi tegangan TTL dan RS-232 dan sebaliknya. Sebagaimana diketahui
dalam dunia komputer tegangan tingkat RS-232 sangat jauh berbeda dengan
tingkat TTL. Jika TTL bekerja dengan tegangan antara 0 sampai dengan 5 volt,
dengan tegangan sekitar 0 volt dianggap sebagai logika ‘0’ dan tegangan sekitar 5
volt sebagai logika ‘1’, sedangkan untuk tingkat RS232 tegangan kerjanya antara
-15 sampai +15 volt dan cara menterjemahkan logika ‘0’ dan ‘1’-nya sangat
berbeda, untuk itu diperlukan suatu piranti khusus yang digunakan untuk
melakukan konversi tingkat tegangan TTL dan RS-232.
Transmisi biasanya menggeser 2 bit dari 10 bit hingga transmisi yang
digunakan adalah 8 bit, satu di master dan satu di slave dan antara master juga
slave terdapat jalur penghubung. Biasanya data yang dikirim pertama kali adalah
MSB (Most Significant Byte) sampai akhirnya ada bit yang dikirim dengan
register yang sama. Setelah data register tergeser, master dan slave harus bertukar
nilai register. Kemudian kedua perangkat tersebut mengambil nilai dan
melakukan sesuatu pada nilai tersebut, seperti menulis nilai tersebut pada memory.
Bila ada data lebih yang ditukar, maka pergeseran register akan memuat data baru
dan akan terus mengulang proses. Gambar TTL/CMOS Serial Logic Waveform
terdapat pada gambar 2.22, gambar RS-232 Logic Waveform terdapat pada
gambar 2.23, gambar Pin I/O Max232 terdapat pada gambar 2.24 dan gambar
Konfigurasi Max 232 terdapat pada gambar 2.25.

36
Gambar 2.22 TTL/CMOS Serial Logic Waveform
Gambar 2.23 RS-232 Logic Waveform
Gambar 2.24 Pin I/O Max 232
Gambar 2.25 Konfigurasi Max 232
1). Keuntungan Komunikasi Serial
Keuntungan dari penggunaan komunikasi serial adalah sebagai berikut:

37
a). Kabel untuk komunikasi serial bisa lebih panjang dibandingkan dengan
pararel.
Data-data dalam komunikasi serial dikirimkan untuk logika ‘1’
sebagai tegangan -3 s/d -25 volt dan untuk logika ‘0’ sebagai tegangan
+3 s/d +25 volt, dengan demikian tegangan dalam komunikasi serial
memiliki ayunan tegangan maksimum 50 volt, sedangkan pada
komunikasi pararel hanya 5 volt. Hal ini menyebabkan gangguan pada
kabel-kabel panjang lebih mudah diatasi dibanding dengan pararel.
b). Jumlah kabel serial lebih sedikit.
Dua perangkat komputer yang berjauhan dengan hanya tiga kabel
untuk konfigurasi null modem, yakni TxD (saluran kirim), RxD (saluran
terima) dan ground, akan tetapi jika menggunakan komunikasi pararel
akan terdapat dua puluh hingga dua puluh lima kabel.
c). Komunikasi serial dapat menggunakan udara bebas sebagai media
transmisi.
Pada komunikasi serial hanya satu bit yang ditransmisikan pada
satu waktu sehingga apabila transmisi menggunakan media udara bebas
(free space) maka dibagian penerima tidak akan muncul kesulitan untuk
menyusun kembali bit-bit yang ditransmisikan.
d). Komunikasi serial dapat diterapkan untuk berkomunikasi dengan
mikrokontroler.
Hanya dibutuhkan dua pin utama TxD dan RxD (diluar acuan
ground).
2). Kekurangan Komunikasi Serial
Kekurangan dari penggunaan komunikasi serial adalah sebagai berikut:
a). Panjang media/kabel maks 15 meter.
b).Sinyal mudah mendapat gangguan.
c). Short circuit maks 500 mA.

38
2.7.3 Aplikasi RS-232
Aplikasi untuk RS-232 banyak digunakan untuk komunikasi antara dua
mikrokontroler. Beberapa aplikasi lain yang menggunakan jalur RS-232 antara
lain:
1). Komunikasi Ethernet, USB, UART.
2). Perancangan berbagai aplikasi sederhana seperti inisialisasi modem, mouse
dan transfer data antar komputer.
3). Komunikasi antara PLC dengan komputer.
2.8 Bahasa Pemograman Basic
1). Tipe Data
Tipe data merupakan bagian program yang paling penting karena
pemilihan tipe data yang tepat akan membuat operasi data menjadi lebih
efisien dan efektif. Untuk jenis tipe data terdapat pada tabel 2.3.
Tabel 2.3 Tipe Data
No Tipe Jangkauan1 Bit 0 atau 12 Byte 0 – 2553 Integer -32.768 s/d +32.7684 Word 0 – 655355 Long -2147483648 s/d +21474836486 Single 1,5x10-45 s/d 3,4x1038
7 Double 5x10-324 s/d 1,7x10308
8 String >254 byte
2). Konstanta
Konstanta merupakan suatu nilai yang tidak dapat diubah selama proses
pemograman berlangsung. Konstanta nilainya tetap dan harus didefinisikan
terlebih dahulu di awal program. Konstanta dapat bernilai integer, pecahan,
karakter, dan string.
3). Variabel
Variabel adalah suatu pengenal (identifier) yang digunakan dalam
mewakili suatu nilai tertentu di dalam proses program. Nilai dari suatu
39
variabel bisa diatur sesuai dengan kebutuhan. Nama dari suatu variabel dapat
ditentukan sendiri oleh pemrogram dengan aturan sebagai berikut:
a). Nama variabel hanya boleh terdiri dari abjad, bilangan, dan tanda
hubung.
b).Panjangnya maksimum 32 karakter
c). Tidak boleh menggunakan spasi
d).Tidak boleh menggunakan simbol khusus seperti : !,@,#,$,%,^,&,*,-
,+,=, dan sebagainya.
4). Deklarasi
Deklarasi diperlukan bila kita akan menggunakan pengenal (identifier)
dalam program. Identifier dapat berupa variabel, konstanta, dan fungsi.
Macam-macam deklarasi antara lain:
a). Deklarasi Variabel
Bentuk Umum pendeklarasian suatu variabel adalah:Contoh : Dim x As Integer ‘Deklarasi x bertipe integer’
b). Deklarasi Konstanta
Dalam Bahasa Basic, konstanta dideklarasikan secara langsung
Contoh : S = “Test” ‘Assign string’
c). Deklarasi Fungsi
Fungsi merupakan bagian yang terpisah dari program dan dapat
diaktifkan atau dipanggil dimanapun dalam program. Fungsi
dalam Bahasa Basic ada yang sudah disediakan sebagai fungsi
pustaka seperti print, input, data, dan untuk menggunakannya
tidak perlu dideklarasikan. Sedangkan fungsi yang perlu
dideklarasikan terlebih dahulu adalah fungsi yang dibuat oleh
pemrogram. Bentuk umum deklarasi sebuah fungsi adalah :
TEST [ ( [BYREF/BYVAL] ) var as type] As type

40
5). Penyeleksian kondisi
Penyeleksian kondisi digunakan untuk mengarahkan perjalanan suatu
proses. Fungsi penyeleksian kondisi mempunyai arti penting dalam
penyusunan Bahasa Basic terutama untuk program yang kompleks.
Penyeleksian kondisi terdiri atas :
a). Struktur Kondisi “IF…THEN…”
Struktur if…then… dibentuk dari pernyataan if dan sering
digunakan untuk menyeleksi suatu kondisi tunggal. Bila proses yang
diseleksi terpenuhi atau bernilai benar, maka pernyataan yang ada
dalam blok if akan diproses dan dikerjakan. Bentuk umum struktur
kondisi if adalah :
If (kondisi) then (pernyataan);
b).Struktur Kondisi “IF…ELSE…”
Dalam struktur kondisi if…else… minimal terdapat dua
pernyataan. Jika kondisi yang diperiksa bernilai benar atau terpenuhi
maka pernyataan pertama yang akan dilaksanakan dan jika kondisi
yang diperiksa bernilai salah, maka pernyataan kedua yang
dilaksanakan. Bentuk umumnya adalah sebagai berikut:
If (kondisi) pernyataan -1
Else pernyataan -2
c). Struktur Kondisi “SWITCH…CASE…”
Struktur kondisi switch…case…default dapat digunakan untuk
penyeleksian kondisi dengan kemungkinan terjadi cukup banyak.
Struktur ini akan melaksanakan salah satu dari beberapa pernyataan
‘case’ tergantung nilai kondisi yang ada dalam switch. Selanjutnya
proses diteruskan hingga ditemukan pernyataan ‘break’. Jika tidak ada
nilai pada case yang sesuai dengan nilai kondisi, maka proses akan
diteruskan kepada pernyataan yang ada dibawah default. Bentuk
umum dari struktur kondisi ini adalah :

41
Select case (kondisi)
{
case 1 : pernyataan -1;
break;
case 2 : pernyataan -2;
break;
……….
case n : pernyataan -n;
break;
default : pernyataan –m
}
6). Perulangan
Dalam Bahasa Basic tersedia suatu fasilitas yang digunakan untuk
melakukan proses yang berulang-ulang sesuai dengan kebutuhan. Struktur
perulangan Bahasa Basic mempunyai bentuk bermcam-macam, antara lain:
a). Struktur Perulangan “WHILE”
Perulangan while banyak digunakan pada program yang
terstruktur. Perulangan ini banyak digunakan bila jumlah
perulangannya belum diketahui. Proses perulangan akan terus
berlanjut selama kondisinya bernilai benar (true) dan akan berhenti
bila kondisinya bernilai salah.
b). Struktur Perulangan “DO…LOOP”
Struktur perulangan do…loop digunakan untuk proses
perulangan sekurang-kurangnya satu kali perulangan.
c). Struktur Perulangan “FOR”
Struktur perulangan for biasa digunakan untuk mengulang
proses yang telah diketahui jumlah perulangannya. Dari segi
penulisan, struktur perulangan for lebih efisien karena susunannya
lebih sederhana. Bentuk umum perulangan for adalah sebagai berikut :
FOR var = start TO end [STEP value]

42
2.9 Liquid Crystal Display
Liquid crystal display (LCD) adalah suatu jenis media tampilan yang
menggunakan kristal cair sebagai penampil utamanya. LCD dalam kehidupan
sehari-hari digunakan seperti untuk tampilan di kalkulator, jam digital, timer pada
microwave dan proyek mikrikontroler. Salah satu output berupa tampilan yang
sering digunakan pada proyek mikrokontroler adalah jenis LCD dengan karakter
16x2, 20x2, 16x4, dan 20x4. Gambar liquid crystal display (LCD) terdapat pada
gambar 2.26.
Gambar 2.26 Liquid Crystal Display (LCD)
Tampilan LCD lebih mudah dalam penggunaannya dibandingkan dengan
tampilan berupa seven segment. Pada LCD telah ada kontroler yang akan
mengatur tampilannya, sedangkan pada seven segment harus menggunakan sistem
scanning dan latch atau membuat kontrol sendiri. Di sisi lain untuk pemrograman
LCD cenderung lebih rumit dibanding pemrograman seven segment. Namun
sekarang sudah banyak library atau buku-buku yang menjelaskan bagaimana cara
memprogram LCD. Untuk penjelasan konfigurasi pin liquid crystal display (LCD)
terdapat pada tabel 2.4.
Tabel 2.4 Konfigurasi Pin Liquid Crystal Display (LCD)
No Pin Simbol Fungsi
1 Vss Ground
2 Vdd +5 V
3 Vo LCD Contrast Adjust

43
Lanjutan Tabel 2.4 Konfigurasi Pin Liquid Crystal Display (LCD)
4 RS Register Select
5 R/W Read/Write
6 E Enable
7 DB0 Data Bit 0
8 DB1 Data Bit 1
9 DB2 Data Bit 2
10 DB3 Data Bit 3
11 DB4 Data Bit 4
12 DB5 Data Bit 5
13 DB6 Data Bit 6
14 DB7 Data Bit 7
+ BL + Power Supply for BL+
- BL - Power Supply for BL-






























