OTIMIZAÇÃO ESTRUTURAL DO SUPORTE DE UMA TURBOMÁQUINA USANDO UM MÉTODO DE ELEMENTOS FINITOS Zélia Garcia Da Fonseca Projeto de Graduação apresentado ao Curso de Engenharia Mecânica da Escola Politéc- nica, Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à ob- tenção do título de Engenheiro. Orientador: José Herskovits Norman Rio de Janeiro Março de 2015

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

OTIMIZAÇÃO ESTRUTURAL DO SUPORTE DE UMA TURBOMÁQUINAUSANDO UM MÉTODO DE ELEMENTOS FINITOS
Zélia Garcia Da Fonseca
Projeto de Graduação apresentado ao Cursode Engenharia Mecânica da Escola Politéc-nica, Universidade Federal do Rio de Janeiro,como parte dos requisitos necessários à ob-tenção do título de Engenheiro.
Orientador: José Herskovits Norman
Rio de JaneiroMarço de 2015
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO Departamento de Engenharia Mecânica
DEM/POLI/UFRJ
OTIMIZAÇÃO ESTRUTURAL DO SUPORTE DE UMA TURBOMÁQUINA USANDO
UM MÉTODO DE ELEMENTOS FINITOS
Zélia Garcia da Fonseca
PROJETO FINAL SUBMETIDO AO CORPO DOCENTE DO DEPARTAMENTO
DE ENGENHARIA MECÂNICA DA ESCOLA POLITÉCNICA DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE
ENGENHEIRO MECÂNICO.
Aprovado por:
________________________________________________
Prof. José Herskovits Norman; D.Sc.
________________________________________________
Prof. Jules Ghislain Slama; D.Sc.
________________________________________________
Prof. Thiago Gamboa Ritto, D.Sc.
RIO DE JANEIRO, RJ - BRASIL
MARÇO DE 2015

Da Fonseca, Zélia GarciaOtimização estrutural do suporte de uma turbomáquina
usando um método de elementos finitos/Zélia Garcia DaFonseca. – Rio de Janeiro: UFRJ/Escola Politécnica, 2015.
XII, 81 p.: il.; 29, 7cm.Orientador: José Herskovits NormanProjeto de Graduação – UFRJ/Escola
Politécnica/Curso de Engenharia Mecânica, 2015.Referências Bibliográficas: p. 80 – 81.1. Elementos Finitos. 2. Otimização. 3. Ansys
Workbench. 4. Algoritmo de pontos interiores. I.Norman, José Herskovits. II. Universidade Federal doRio de Janeiro, Escola Politécnica, Curso de EngenhariaMecânica. III. Título.
iii

Agradecimentos
Em primeiro lugar, gostaria de agradecer à minha família por sua capacidade deacreditar e investir em mim.
Ao professor José Herskovits pela paciência na orientação que tornou possível aconclusão deste trabalho.
Aos amigos do Laboratório OptimizE pela paciência, ajuda e apoio.
Aos amigos que fiz durante a faculdade em que a amizade não foi provada apenasnos momentos de alegria, mas principalmente nos momentos de dificuldades.
iv

Resumo do Projeto de Graduação apresentado à Escola Politécnica/UFRJ comoparte dos requisitos necessários para a obtenção do grau de Engenheiro Mecânico.
OTIMIZAÇÃO ESTRUTURAL DO SUPORTE DE UMA TURBOMÁQUINAUSANDO UM MÉTODO DE ELEMENTOS FINITOS
Zélia Garcia Da Fonseca
Março/2015
Orientador: José Herskovits Norman
Programa: Engenharia Mecânica
O presente trabalho consiste na otimização estrutural do suporte de umaturbomáquina. O objetivo foi reduzir a massa da base considerando as restriçõesde tensão equivalente de Von Mises e as frequências naturais próximas a rotação damáquina. Primeiramente, a geometria foi gerada no SolidWorks e esta foi importadapelo programa de elementos finitos Ansys Workbench. A etapa de otimização foirealizada após serem feitas análises estrutural e modal e assim definidas as restrições.A otimização foi feita a partir do pacote de Design Exploration do Ansys. Comoa análise real da função demanda muito tempo computacional, foi selecionado aparte chamada de Response Surface do pacote. Para que o método de superfíciede reposta fosse utilizado, primeiro foi definido os experimentos de projeto (DesignOf Experiments) a partir do método de amostragem por hipercubo latino (LHS,Latin Hypercube sampling). Em seguida, foi selecionado o método de superfíciede resposta (Response Surface) que permite determinar a acurácia, o Kriging. Naotimização (Optimization), foi escolhido um algoritmo de pontos interiores que éa Programação não-linear por Lagrangeano quadrático (Nonlinear Programmingby Quadratic Lagrangian- NLPQL). Após obtidos os resultados da otimização, foipossível chegar a uma estrutura com a massa reduzida sem comprometer a segurança.
Palavras-chaves: Elementos Finitos, Otimização, Ansys Workbench, Algoritmode Pontos Interiores.
v

Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillmentof the requirements for the degree of Mechanic Engineer.
STRUCTURAL OPTIMIZATION OF THE SUPPORT OF A TURBOMACHINEUSING A FINITE ELEMENT METHOD
Zélia Garcia Da Fonseca
March/2015
Advisor: José Herskovits Norman
Department: Mechanical Engineering
This work consists of a structural optimization of the support of aturbomachine. The objective was to reduce the mass of the base consideringconstraints of the equivalent stress of Von Mises and the natural frequencies nearthe rotation of the machine. First, the geometry was generated in SolidWorksand this was imported by the the finite element program Ansys Workbench. Theoptimization step was carried out after defined constraints being made structuraland modal analysis. The optimization was taken from the package of Ansys calledDesign of Exploration. Because the actual analysis of the function demands muchcomputational time, was selected the Response Surface package and firstly wasdefined the Design Of Experiments being selected the LHS method (Latin Hypercubesampling). Then we selected the Response Surface method that determines theaccuracy, the Kriging. In the Optimization, an interior point algorithm was chosen,Nonlinear Programming by Quadratic Lagrangian- NLPQL . After obtained theresults of the optimization, the reduced mass of the structure was reached withoutcompromising security.
Keywords : Finite Element, Optimization, Ansys Workbench, Interior PointAlgorithm.
vi
Sumário
Lista de Figuras ix
Lista de Tabelas xii
1 Introdução 11.1 Considerações Iniciais . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Justificativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.4 Metodologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.5 Organização do trabalho . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Fundamentos Teóricos 42.1 Definição do problema de otimização . . . . . . . . . . . . . . . . . . 42.2 Tipos de modelos aproximados . . . . . . . . . . . . . . . . . . . . . . 62.3 Projeto de experimentos (DOE, Design Of Experiments) . . . . . . . 72.4 Modelo de Kriging . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.5 Otimização não-linear . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.5.1 Conceitos preliminares . . . . . . . . . . . . . . . . . . . . . . 122.5.2 Condições de otimalidade . . . . . . . . . . . . . . . . . . . . 142.5.3 Otimização com restrição de desigualdade . . . . . . . . . . . 152.5.4 Métodos tipo Newton para sistemas não-lineares . . . . . . . 162.5.5 Algoritmo Quase-Newton . . . . . . . . . . . . . . . . . . . . . 192.5.6 Busca linear de Armijo . . . . . . . . . . . . . . . . . . . . . . 212.5.7 Programação sequencial quadrática . . . . . . . . . . . . . . . 222.5.8 Programação não-linear por Lagrangeano Quadrático . . . . . 25
3 Análises preliminares 313.1 Descrição dos elementos finitos . . . . . . . . . . . . . . . . . . . . . . 31
3.1.1 Solid 185 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.1.2 Solid 186 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.1.3 Solid 187 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.1.4 Shell 181 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
vii

3.1.5 Shell 281 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.2 Seleção do elemento a ser usado nas análises do Ansys . . . . . . . . . 35
3.2.1 Descrição do problema de análise estática . . . . . . . . . . . . 353.2.2 Descrição do problema de análise modal . . . . . . . . . . . . 393.2.3 Resultados das simulações com diferentes tipos de elementos . 403.2.4 Discussão dos resultados das simulações . . . . . . . . . . . . 44
4 Otimização estrutural com Ansys Workbench 464.1 Primeira otimização . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.1.1 Análise estrutural estática . . . . . . . . . . . . . . . . . . . . 484.1.2 Análise Modal . . . . . . . . . . . . . . . . . . . . . . . . . . . 534.1.3 Definindo as variáveis de projeto . . . . . . . . . . . . . . . . . 564.1.4 Função Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . 574.1.5 Restrições . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 584.1.6 Otimização no Ansys Workbench . . . . . . . . . . . . . . . . 584.1.7 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.2 Segunda otimização . . . . . . . . . . . . . . . . . . . . . . . . . . . . 654.2.1 Análise estrutural estática . . . . . . . . . . . . . . . . . . . . 664.2.2 Análise Modal . . . . . . . . . . . . . . . . . . . . . . . . . . . 674.2.3 Variáveis de projeto . . . . . . . . . . . . . . . . . . . . . . . . 684.2.4 Função Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . 684.2.5 Restrições . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 684.2.6 Otimização no Ansys Workbench . . . . . . . . . . . . . . . . 694.2.7 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.3 Configuração final da estrutura . . . . . . . . . . . . . . . . . . . . . 73
5 Considerações finais 755.1 Conclusões . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 755.2 Sugestões para trabalhos futuros . . . . . . . . . . . . . . . . . . . . . 76
A Desenho técnico das estruturas 77
Referências Bibliográficas 80
viii

Lista de Figuras
2.1 Divisão em 4 intervalos do domínio de duas variáveis aleatórias. . . . 92.2 Valores sorteados para cada variável. . . . . . . . . . . . . . . . . . . 102.3 Representação bi-dimensional de uma possível amostragem por
hipercubo latino. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.4 Direção de descida e viável. [7] . . . . . . . . . . . . . . . . . . . . . 142.5 Ilustração da condição de otimalidade de primeira ordem. [7] . . . . . 152.6 Ilustração da condição de Karush-Kuhn-Tucker. [7] . . . . . . . . . . 162.7 Ilustração do método de aproximações sucessivas. [7]. . . . . . . . . . 182.8 Iterações de Newton. [7] . . . . . . . . . . . . . . . . . . . . . . . . . 192.9 Regra de Armijo [8] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.1 Tipos de elementos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.2 Elemento Solid185. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.3 Elemento Solid186. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.4 Elemento Solid187. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.5 Elemento Shell181. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.6 Elemento Shell281. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.7 Viga em balanço . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.8 Diagrama de corpo livre . . . . . . . . . . . . . . . . . . . . . . . . . 363.9 Tensões de flexão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373.10 Seção da viga isolada. . . . . . . . . . . . . . . . . . . . . . . . . . . . 373.11 Perfil I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.12 Distribuição de tensão de cisalhamento . . . . . . . . . . . . . . . . . 393.13 Viga em balanço para o problema da análise modal. . . . . . . . . . . 393.14 Tensões de flexão da viga modelada com o elemento Solid187. . . . . 413.15 Tensões equivalente da viga modelada com o elemento Solid187. . . . 423.16 Tensões de flexão da viga modelada com o Shell281 (quad8). . . . . . 423.17 Tensões equivalente da viga modelada com o elemento Shell281 (quad8). 43
4.1 Vista isométrica da estrutura . . . . . . . . . . . . . . . . . . . . . . 464.2 Parametrização . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
ix

4.3 Interface do SolidWorks com o Ansys . . . . . . . . . . . . . . . . . . 474.4 Abrir geometria no Ansys e parametrizar . . . . . . . . . . . . . . . . 484.5 Análise estrutural estática . . . . . . . . . . . . . . . . . . . . . . . . 484.6 Modelo estrutural estático. . . . . . . . . . . . . . . . . . . . . . . . . 494.7 Ponto remoto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 504.8 Análise de convergência da malha da análise estrutural. . . . . . . . . 504.9 Malha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 514.10 Carregamentos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 524.11 Tensão equivalente da configuração inicial. . . . . . . . . . . . . . . . 524.12 Análise Modal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534.13 Modelo análise modal. . . . . . . . . . . . . . . . . . . . . . . . . . . 534.14 Ponto de massa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544.15 Análise de convergência da malha da análise modal. . . . . . . . . . . 544.16 Parâmetros Peça 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 564.17 Parâmetros Peça 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 574.18 Acionando o parâmetro da função objetivo . . . . . . . . . . . . . . . 584.19 Acionando o parâmetro da restrição de tensão. . . . . . . . . . . . . . 584.20 Esquema do projeto. . . . . . . . . . . . . . . . . . . . . . . . . . . . 594.21 Pontos do experimentos de projetos × tensão equivalente . . . . . . . 604.22 Pontos do experimentos de projetos × Massa . . . . . . . . . . . . . . 604.23 Curva de convergência da superfície de resposta. . . . . . . . . . . . . 604.24 Sensibilidade das variáveis de projeto. . . . . . . . . . . . . . . . . . . 614.25 Superfície de resposta para Tensão Equivalente (MPa) . . . . . . . . 624.26 Superfície de resposta para Massa(Kg) . . . . . . . . . . . . . . . . . 624.27 Definido função objetivo e restrição no Ansys . . . . . . . . . . . . . 634.28 Tabela de chapas grossas comerciais. Fonte: Gerdau [14]. . . . . . . 654.29 Cotas alteradas após a primeira otimização. . . . . . . . . . . . . . . 664.30 Tensão equivalente da estrutura após a primeira otimização. . . . . . 674.31 Acionando o parâmetro da função objetivo da nova otimização. . . . . 684.32 Acionando o parâmetro da restrição de tensão da nova otimização. . . 694.33 Pontos do experimentos de projetos × tensão equivalente da nova
otimização . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 694.34 Pontos do experimentos de projetos × Massa da nova otimização . . . 704.35 Curva de convergência da superfície de reposta da nova otimização. . 704.36 Sensibilidade das variáveis de projeto da nova otimização. . . . . . . . 714.37 Superfície de resposta para Tensão Equivalente (MPa) da nova
otimização. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 714.38 Superfície de resposta para Massa(Kg) da nova otimização. . . . . . 724.39 Implementação de novos reforços na estrutura final. . . . . . . . . . . 73
x

4.40 Tensão equivalente da configuração final da estrutura. . . . . . . . . 74
xi

Lista de Tabelas
3.1 Valores de β [13]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403.2 Comparação dos resultados (Tensão de flexão de tração) . . . . . . . 433.3 Comparação dos resultados (Tensão Equivalente -Von Mises) . . . . . 443.4 Comparação dos resultados (Frequências naturais) . . . . . . . . . . . 44
4.1 Propriedades mecânicas do aço estrutural ASTM A36. . . . . . . . . 494.2 Modos de frequência da configuração inicial. . . . . . . . . . . . . . . 554.3 Comparação do peso das peças que compõem a estrutura . . . . . . . 564.4 Limite superior e inferior das variáveis de projeto . . . . . . . . . . . 574.5 Pontos candidatos da otimização com restrições de frequências
naturais e tensão equivalente . . . . . . . . . . . . . . . . . . . . . . . 634.6 Valores das cotas alteradas após a primeira otimização. . . . . . . . . 664.7 Modos de frequência da configuração após a primeira otimização. . . 674.8 Limite superior e inferior das variáveis de projeto da segunda
otimização. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 684.9 Pontos candidatos da nova otimização com restrições de frequências
naturais e tensão equivalente. . . . . . . . . . . . . . . . . . . . . . . 724.10 Valores ótimos das variáveis de projeto. . . . . . . . . . . . . . . . . . 734.11 Modos de frequência da configuração final. . . . . . . . . . . . . . . . 74
xii
Capítulo 1
Introdução
1.1 Considerações Iniciais
O projeto do suporte de turbomáquinas depende dos tipos de esforços que estesofre. Os esforços dependem do princípio de funcionamento, direção de fluxo, tipode escape e etc, ou seja, o projeto do suporte depende do tipo de turbomáquina. Opresente trabalho trata de uma otimização estrutural de um suporte.
Não foram encontradas literaturas falando a respeito da otimização do suporte deturbomáquinas, sendo mais discutido e estudado as fundações nas quais os suportesse apoiam[1]. Em Cheng et al. (1997) [2] a fundação foi modelada como uma treliça,e programação linear sequencial é usada para minimizar tanto o peso estruturalcomo a amplitude de vibração forçada do sistema. A otimização do suporte contoucom análises estrutural estática e modal, sendo este construído como um únicoelemento sólido. A otimização da massa do suporte foi feita através da solução desubproblemas de programação sequencial quadrática sujeito a restrições de tensãoequivalente e frequências naturais.
Existem três classes de otimização estrutural, e na concepção do projeto deve-se escolher qual delas utilizar: otimização dimensional, otimização geométrica eotimização topológica. No presente trabalho, foi realizada a otimização dimensionalque utiliza como variável de projeto um parâmetro de um elemento estrutural.No caso de um elemento unidimensional, a variável de projeto é a área da seçãotransversal. Para um sólido bidimensional, a variável de projeto é a sua espessura enecessita-se utilizar técnicas de discretização do domínio para possibilitar a obtençãode uma solução numérica via método dos elementos finitos.
1
1.2 Objetivos
Este trabalho tem como objetivo principal minimizar o peso de uma estrutura quesuporta uma máquina geradora de potência a vapor e como objetivos específicos:gerar a geometria da estrutura no SolidWorks, fazer análises estáticas e modaispara determinar as tensões e frequências críticas no Ansys Workbench e definir osparâmetros que serão usados na otimização através do pacote Design Explorationdo Ansys.
Com os resultados obtidos da otimização será possível selecionar novas peçaspara compor a estrutura com redução no peso sem comprometer a segurança.
1.3 Justificativa
O principal objetivo de um projeto estrutural é garantir que a estrutura seja capazde cumprir as funções dela requerida, tal como suportar carregamentos, e atingiristo com um preço razoável. A segurança e o desempenho de um sistema estruturalsão os principais objetivos técnicos de um projeto de engenharia, ou seja, cumprirsua função para qual foi projetado, com durabilidade e atendendo as condições deutilização.
Em um mercado tão competitivo a redução da massa não só reduz o custo comofacilita a logística do equipamento. Dependendo de onde o equipamento é instaladoa redução da massa torna-se obrigatória. Logo, a concepção do melhor projeto éalcançada depois de análises e otimizações.
1.4 Metodologia
A primeira ação realizada foi decidir de que maneira a geometria será gerada,assim como o software utilizado (SolidWorks). Em seguida, foi feito um estudo dequal o melhor elemento a ser usado na análise de elementos finitos. A partir daí, foipossível fazer a análise, definir os parâmetros e otimizar (Ansys Workbench).
No pacote de otimização Design Exploration do Ansys Workbench foi feitauma análise para definir os experimentos de projetos, a superfície de reposta e ométodo de otimização. O algoritmo de otimização selecionado foi um método depontos interiores, Programação não-linear por Lagrangeano quadrático (NonlinearProgramming by Quadratic Lagrangian- NLPQL). Este recorre ao método deprogramação quadrática sequencial e possibilita resolver problemas de otimizaçãocom funções não-lineares. Desenvolvido por K. Schittowski (1981), este algoritmotem sido usado em bastantes áreas científicas e tem feito parte de alguns softwares doramo da engenharia, como por exemplo: Ansys (para otimização estrutural). Outro
2
algoritmo similar a este é o FAIPA(Feasible Arc Interior Point Algorithm). Esteúltimo foi proposto por Herskovits et al. (1998), e também é um algoritmo de pontosinteriores que encontra um mínimo local do problema geral de otimização não-linear.Neste algoritmo, são feitas iterações nas variáveis de projeto (variáveis primais) e nosmultiplicadores de Lagrange (variáveis duais), até que sejam verificadas as condiçõesde otimalidade de Karush-Kunhn-Tucker.
1.5 Organização do trabalho
O trabalho ficou divido em cinco capítulos. O primeiro foi destinado a uma breveintrodução sendo que no capítulo seguinte, capítulo 2, é feita uma apresentaçãotéorica sobre o projeto de experimentos, o tipo de superfície de resposta escolhida ea otimização.
No capítulo 3, é feita uma comparação dos resultados obtidos da análise de umaviga engastada em uma extremidade e submetida a um carregamento na outra demaneira analítica e resutados obtidos nas simulações no Ansys, usando diferentestipos de elementos, e assim mostrar o porquê da escolha do elemento Solid 187.Além disso, foi feito um estudo do melhor elemento a ser utilizado na análise modal.
No capítulo 4, é explicado todas as etapas das análises estática e modal e osprocedimentos para a otimização, bem como os resultados obtidos e é feita a propostapara a nova configuração da estrutura.
Finalmente, no capítulo 5, são apresentadas as conclusões do trabalho e aspropostas de trabalhos futuros.
3
Capítulo 2
Fundamentos Teóricos
2.1 Definição do problema de otimização
O melhor projeto é obtido se um custo é apropriado ou se a função objetivo podeser reduzida. A função objetivo é uma função das variáveis de projeto e quantificaa qualidade do objeto material a ser projetado. O projeto trata de uma otimizaçãoestrutural do suporte de uma turbomáquina sujeito a restrições de desigualdade: amáxima tensão equivalente de Von Mises e as frequências naturais.
Se chamarmos x = [x1, x2, . . . , xn] de variáveis de projeto, f(x) a função objetivoe Ω a região viável, resolver um problema de otimização consiste em encontrar ovalor que tem que ter as variáveis de projeto para minimizar (ou maximizar) afunção objetivo satisfazendo um conjunto de restrições que podem ser expressascomo gi(x) e hi(x), desigualdades e igualdades em função das variáveis de projeto,respectivamente.
Um problema de otimização com restrições pode ser formulado da seguintemaneira:
minimizarx∈Ω
f(x)
sujeito a: hi(x) = 0, i = 1, . . . , pgj(x) ≤ 0, j = 1, . . . , q
(2.1)
Método de otimização
Um método de otimização é geralmente um método iterativo para encontrar ominimizador de um problema de otimização. O processo iterativo tem a seguinteestrutura:
• Dado um ponto inicial x0 ∈ Rn gerar uma sequencia xk de pontos;
4

• Em cada iteração são calculadas uma direção de busca d ∈ Rn e um tamanhode passo t. Assim, a atualização do ponto xk+1 está dada por:
xk+1 = xk + tkdk (2.2)
• O Processo iterativo termina quando certos critérios de convergência sãosatisfeitos. Um de esses critérios pode ser o seguinte:
‖∇f(xk)‖ ≤ ε (2.3)
onde ε corresponde ao valor da tolerância. Se a Equação (2.3) é satisfeitasignifica que ∇f(xk) tende a zero e portanto a sequencia xk converge paraum ponto estacionário.
Formulação
• Função Custo:
A função que se deseja achar o valor ótimo (mínimo) é a função massa daestrutura, M .
• Variáveis de projeto:
As variáveis de projeto serão definidas e detalhadas na seção 4.1.3. Essas sãodimensões das peças que compõe a estrutura e o número n de variáveis deveestar entre 10 e 15 para melhor desempenho dos cálculos do Ansys.
x = [x1, . . . , xi, . . . , xn], i = 1, 2, . . . , n. (2.4)
• Restrições:
Serão usadas as seguintes restrições:
1. As tensões σ devem estar abaixo do valor crítico σ para garantir que aestrutura não irá sofrer nunhum dano como empenamento e quebra.
σ ≤ σ (2.5)
2. As variáveis de projeto apresentam um valor máximo e mínimo.
x x x (2.6)
3. As frequências naturais da estrutura ωr devem estar afastadas dasfrequências de rotação da máquina. As frequências naturais ωr e os modos
5
de vibração Φr ∈ Rn do problema homogêneo conservativo associado sãocalculados resolvendo o seguinte problema de autovalor generalizado:
[K − ω2rM ]Φr = 0, (r = 1, . . . , n) (2.7)
Foram analisadas as frequências naturais que mais se aproximavam dafrequência de rotação da máquina (ω = 113, 33 Hz) e imposto um limitesuperior para a frequência mais próxima abaixo deste valor(ω) e um limiteinferior para a frequência mais próxima acima deste valor (ω), sendo atolerância de α = ±15Hz do valor da frequência de rotação da máquina.
• Problema de otimização:
min M(x)tal que: ω(x) ≤ ω − α
ω(x) ≥ ω + α
σmax(x) ≤ σ
x x x
(2.8)
2.2 Tipos de modelos aproximados
É frequente os casos em que as funções de modelagem em engenharia a seremotimizadas solicitem um tempo computacional elevado ou é cara para ser avaliada.O uso dos modelos de aproximação objetiva substituir a função real e o modelosubstituto é menos preciso ou apresenta menor qualidade que a função verdadeira.
Os modelos de aproximação podem ser classificados em dois tipos: modelosfísicos, que são soluções numéricas das equações governantes dos sistemas físicos;e modelos funcionais, que são aproximações funcionais das soluções das equaçõesconstruídas sem recorrer ao conhecimento do sistema físico, ou seja, usando somenteos valores da função.
Dentro dos modelos funcionais, se distinguem dois tipos de modelos: modelosinterpolantes e modelos não interpolantes. Os modelos interpolantes passam pelosdados fornecidos enquanto os modelos não interpolantes não cumprem com isto, masincorporam certo grau de flexibilidade(se incorporar mais dados) na aproximação.
Exemplos de modelos do tipo funcional são interpolações polinomiais, splines,redes neurais, e outros tipos de ajustes de curvas, particularmente os modelos desuperfícies de resposta, e modelos de mínimos quadrados. No presente trabalho foiutilizado Kriging como método de superfície de resposta, sendo este apresentadomais adiante.[3]
6

2.3 Projeto de experimentos (DOE, Design OfExperiments)
O modelo aproximado requer informações da função f a ser aproximada. Oprocesso comum consiste em obter pontos (amostras) onde se avalia f para depoisobter o modelo aproximado seja por interpolação ou por ajuste. O processo queseleciona os pontos é conhecido como amostragem. Nesta é preciso selecionarcuidadosamente os pontos para cumprir os critérios requeridos pelo modelo, e.g.,quantidade de pontos requeridos e regularidade na distribuição (conjunto bemposto). As estratégias de amostragem geralmente visam a distribuição uniforme dospontos com a finalidade de que eles obtenham a melhor caracterização da função naregião de aproximação.
A seleção de pontos no espaço de projeto onde a resposta tem que seravaliada é frequentemente chamada projeto de experimentos. Assim, um projetode experimentos representa a sequência de experimentos (análises) a ser realizada,expressa em termos de fatores (variáveis de projeto) fixos em níveis especificados(valores predefinidos). Um projeto experimental é comumente representado pelamatriz X onde as linhas denotam execuções de experimentos, e as colunas denotamas configurações de um dado fator. Assim, X pode ser representada como
X =
x
(1)1 x
(1)2 · · · x(1)
n... ... . . . ...
x(ne)1 x
(ne)2 · · · x(ne)
n
(2.9)
Na maioria das aplicações onde assume-se que não é conhecido o comportamentoda função, e os dados são colecionados a partir de simulações computacionaisdeterminísticas, o principal interesse é minimizar o erro de desvio (bias error) já queo erro aleatório é pequeno. Para ter um ponto de vista estatístico de comparaçãodos diferentes projetos de experimentos explica-se a seguir o significado dos termosdesvio e variância.desvio (bias): quantifica a magnitude em que a saída do modelo aproximado(resposta), ou seja f(x) difere do valor real f(x). O desvio se calcula como a médiade todos os conjuntos de dados possíveis D.variância (var): mede quão sensível é o modelo aproximado f(x) ao conjuntoparticular de dados D. Cada conjunto de dados D corresponde a uma amostraaleatória da função real.Para uma formulação de erro médio as expressões para desvio e variância se mostramnas (2.10) e (2.11) respectivamente. Nas duas expressões ET CD denota o valor
7
esperado considerando todos os conjuntos de dados possíveis.
Ebias2(x) = ET CD[f(x)]− f(x)2, (2.10)
Evar(x) = ET CD[f(x)− ET CD[f(x)]]2. (2.11)
Existe uma relação entre o desvio e a variância. Um modelo aproximado queajusta estreitamente um conjunto particular de dados (pouco desvio) tenderá a pro-ver uma grande variância. Podemos diminuir a variância ao suavizar o modeloaproximado, mas ao simplificar demais o modelo o erro de desvio fica significati-vamente grande. Em princípio, podemos reduzir tanto o desvio (pode-se escolhermodelos mais complexos) como a variância (cada modelo mais fortemente restrin-gido pelos dados) ao aumentar o número de pontos de maneira que o aumento narestrição feita pelos dados seja maior que o aumento na complexidade do modelo.
Na prática, o número de pontos no conjunto de dados é fortemente limitadodevido ao custo computacional, por isto durante a construção do modelo aproximadofrequentemente procura-se um equilíbrio entre os erros originados por desvio e oscausados por variância. Este equilíbrio pode ser atingido reduzindo o erro de desvioenquanto se impõem penalidades na complexidade do modelo. No trabalho, o tipode projeto de experimento utilizado foi a amostragem por hipercubo Latino (LHS,Latin Hypercube sampling) [3].
Amostragem por Hipercubo Latino (LHS, Latin Hypercubesampling)
Nos projetos de experimentos procura-se uma uniformidade e para isso busca-semaximizar a distância mínima entre os pontos de projeto, ou minimizar medidasde correlação dentro dos dados amostrais. Um exemplo de implementação práticadestas estratégias é a amostragem por hipercubo Latino (LHS, Latin Hypercubesampling).
Uma amostragem estratificada garante que todas as porções de uma dadaregião sejam amostradas. LHS é uma estratégia de amostragem estratificada e foidescrito por McKay et al.(1979) [4]. Nela, o domínio de cada variável aleatóriaxk (k = 1, . . . ,M) é dividido em N intervalos, ∆xk
i (i = 1, 2, . . . , N) de igualprobabilidade 1/N como mostrado nas Figuras 2.1 a e b.
Na Figura 2.1 são apresentadas duas variáveis aleatórias, uma tendo distribuiçãonormal e outra, distribuição uniforme. O domínio de cada variável foi dividido emquatro intervalos.
8

(a) Distribuição normal (b) Distribuição uniforme
Figura 2.1: Divisão em 4 intervalos do domínio de duas variáveis aleatórias.
O número de intervalos N na amostragem por hipercubo latino deve ser igualao da amostra desejada, ou seja, igual ao número total de simulações. Para cadaintervalo é mostrado apenas um valor (xi
k), isto é, este valor será usado apenas emuma simulação.
Os valores mostrados xki , para um valor i qualquer, são obtidos pela resolução
da equação 2.12:
Fk(xik) = i− 1 +Ri
Ni = 1, 2, . . . , N. (2.12)
onde Ri representa uma distribuição aleatória uniforme no intervalo [0,1].A amostragem é realizada utilizando a transformada inversa da função de
distribuição de probabilidade em questão, como em 2.13.
xik = Fk
(i− 1 +Ri
N
)i = 1, 2, . . . , N. (2.13)
Como exemplo da amostragem por hipercubo latino, suponha uma distribuiçãobivariada onde uma variável tem distribuição normal e a outra, uniforme. Na Figura2.2 são apresentados os quatro valores sorteados para cada uma das duas variáveis.Esses valores estão marcados nos respectivos eixos. Note que foi sorteado apenasum valor para cada intervalo.
Com os N valores para cada variável xk, esses devem ser emparelhados deforma aleatória com os valores das demais variáveis. Dessa forma, são formadosN vetores de dimensão M . A seleção aleatória do i-ésimo valor de cada variávelé realizada mediante a permutação aleatória dos inteiros 1, 2, . . . , N . Na Figura2.3 é apresentada uma possível amostra de quatro pontos gerados utilizando aamostragem por hipercubo latino do exemplo anterior [5].
9

Figura 2.2: Valores sorteados para cada variável.
Figura 2.3: Representação bi-dimensional de uma possível amostragem porhipercubo latino.
2.4 Modelo de Kriging
Os modelos funcionais podem incorporar um componente estocástico, o quepode torná-los mais adequados para fins de otimização global. Um exemplo popularé Kriging. Falando em termos gerais, os modelos de Kriging estão formados por doiscomponentes. Tipicamente o primeiro componente é um modelo simples destinadoa captar a tendência dos dados. O outro componente mede o desvio entre o modelosimples e a função real. Conforme descrito em [6], Kriging pode ser representado daseguinte forma:
y(x) = f(x) + Z(x) (2.14)
onde y(x) é a função desconhecida de interesse, ou seja, função massa da estrutura,f(x) é uma função polinomial de x, sendo x as cotas da estrutura que foram definidas
10

como variáveis de projeto, e Z(x) é a realização de um processo aleatório Gaussianocom média zero, variância σ2, e covariância diferente de zero. O termo f(x) ésemelhante ao modelo polinomial de uma superfície de resposta e fornece um modelo"global"de espaço de projeto.
Enquanto f(x) aproxima "globalmente"o espaço de projeto, Z(x) cria desvios"localizados", de modo que o modelo Kriging interpola os pontos de dados de amostraN . A matriz de covariância de Z(x) é dada por:
Cov[Z(xi), Z(xj)] = σ2R([r(xi, xj)]) (2.15)
Em que R é a matriz de correlação, r e (xi, xj) é a correlação espacial da funçãoentre quaisquer dois dos N pontos de amostragem xi e xj. R é uma N ×N matrizdefinida positiva simétrica, com uns ao longo da diagonal. A função de correlaçãor(xi, xj) é uma função de correlação Gaussiana:
r(xi, xj) = exp
(−
M∑k=1
θk
∣∣∣xik − x
jk
∣∣∣2) (2.16)
θk são os parâmetros desconhecidos utilizados para ajustar o modelo, M é onúmero de variáveis de projeto, xi
k e xjk são os componentes K-ésimo de pontos da
amostra xi e xj. Em alguns casos, utilizando um único parâmetro de correlaçãoé suficiente para dar bons resultados; no Ansys é possível especificar a utilizaçãode um único parâmetro de correlação, ou um parâmetro de correlação para cadavariável de projeto.
Z(x) pode ser escrito assim:
Z(x) =N∑
i=1λir(xi, x) (2.17)
2.5 Otimização não-linear
A otimização estrutural foi feita a partir do algoritmo de Programação não-linear por Lagrangeano quadrático (NLPQL). NLPQL é um algoritmo de otimizaçãomatemática desenvolvido por Klaus Schittkowski. Este método resolve problemasde programação não-linear com restrições que apresentam a seguinte forma:
minimize f (x)sujeito a gk (x) ≤ 0, ∀ k = 1, 2, . . . , K
hl (x) = 0, ∀ l = 1, 2, . . . , Londe xL ≤ x ≤ xU
Supõe-se que a função objetivo e as restrições são continuamente diferenciável.
11

A ideia é a de gerar uma sequência de subproblemas de programação quadráticaobtidos por uma aproximação quadrática da função Lagrangeana e uma linearizaçãodas restrições. As informações são atualizadas através da fórmula de quase-Newtone o método é estabilizado por um adicional de busca linear (Armijo).
O método pressupõe que o tamanho do problema não é muito grande e queé bem-dimensionado. Além disso, a exatidão dos métodos depende da precisãodos gradientes. Uma vez que, para problemas mais práticos onde os gradientesanalíticos não estão disponíveis, é imperativo que os (com base nas diferenças finitas)gradientes numéricos sejam tão precisos quanto possível.
2.5.1 Conceitos preliminares
Um problema de otimização consiste na minimização ou maximização de umadeterminada função (função objetivo) sujeito a restrições nas suas variáveis.Matematicamente o problema geral de otimização não linear com restrições podeser formulado na seguinte forma:
minimizarx∈Rn
f(x),
sujeito a: gi(x) ≤ 0, i = 1, . . . ,m.(2.18)
A formulação (2.18) tem a seguinte interpretação: procurar na região viável
Ω := x ∈ Rn : gi(x) ≤ 0, i = 1, . . . ,m (2.19)
o vetor x∗ tal quef(x∗) ≤ f(x), para todo x ∈ Ω. (2.20)
O vetor x ∈ Rn é o vetor de variáveis do problema, ou variáveis de projeto,f : Rn → R é a função custo ou função objetivo. As funções gi : Rn → R sãodenominadas funções de restrição de desigualdade. As funções f e gi devem serfunções contínuas com derivadas contínuas.
Um ponto x∗ que verifica a condição (2.20) é denominado mínimo global doProblema (2.18). Infelizmente, a condição (2.20) não é fácil de verificar em geral. Omínimo global somente pode ser caracterizado em situações especiais, por exemplo,quando as funções f e gi são convexas.
As técnicas gerais de programação matemática procuram pontos denominadosmínimos locais.
Definição 2.5.1. Um ponto x∗ ∈ Ω é um Mínimo Local (ou Mínimo Relativo) def sobre Ω se existe a vizinhança ∆ ≡ x ∈ Ω/ ‖x− x∗‖ ≤ δ tal que f(x) ≥ f(x∗)para qualquer x ∈ ∆. Se f(x) ≥ f(x∗) para qualquer x ∈ ∆, então x∗ é um Mínimo
12

Local Estrito.
Definição 2.5.2. Um algoritmo iterativo é dito ser Globalmente Convergente separa qualquer ponto inicial x0 ∈ Rn(ou x0 ∈ Ω) gere uma sequência de pontos queconvirjam para uma solução do problema.
Definição 2.5.3. Um algoritmo iterativo é Localmente Convergente se existe umρ positivo tal que para qualquer ponto inicial x0 ∈ Rn(ou x0 ∈ Ω) verificando‖x0 − x∗‖ ≤ ρ, gere uma sequência de pontos que convirjam para uma solução doproblema.
Definição 2.5.4. A Ordem de Convergência de uma sequênciaxk→ x∗ é o maior
número p dos números p não negativos satisfazendo
limk→∞
∥∥∥xk+1 − x∗∥∥∥
‖xk − x∗‖p = β <∞
Quando p = 1 temos Convergência Linear com Razão de Convergência β < 1.Se β = 0, a convergência é dita superlinear. A convergência é quadrática no casoem que p = 2.
Em geral, os algoritmos globalmente convergentes defini em cada ponto umadireção de busca e procura um novo ponto nesta direção.
Definição 2.5.5. Um vetor d ∈ Rn é uma Direção de Descida da função real f emx ∈ Rn se existe δ > 0 tal que f(x + td) < f(x) para todo t ∈ [0, δ].
Se f é diferenciável em x e dt∇f(x) < 0, é fácil de provar que d é uma direçãode descida f .
Na Figura 2.4a, contornos de f(x) com valor constante estão representados.Nota-se que f(x) diminui em qualquer direção que faz um ângulo maior do que 90graus com f(x). O conjunto de todas as direções de descida constitui a metadeespaço D.
Definição 2.5.6. Um vetor d ∈ Rn é uma Direção Viável do Problema 2.18, emx ∈ Ω se existe θ > 0 tal que x + td ∈ Ω para todo t ∈ [0, θ].
Na Figura 2.4b a região viável de um problema com restrição de desigualdade érepresentado. O vetor d é uma direção viável, uma vez que suporta um segmentodiferente de zero [x;x + θd]. Qualquer direção é viável em um ponto interior. Nolimite, as direções viáveis constitui um cone F que é chamado de Cone de DireçãoViável. Este cone não é necessariamente fechado.[7]
13

(a) Direção de descida (b) Direção viável
Figura 2.4: Direção de descida e viável. [7]
2.5.2 Condições de otimalidade
Um primeiro requisito para resolver problemas de otimização é caracterizar assoluções por condições que são fáceis de verificar. Estas condições serão úteispara identificar um ponto mínimo e, com frequência, estará no centro das técnicasnuméricas para resolver o problema.
Condições de otimalidade são baseadas em cálculo diferencial, e diz que são deprimeira ordem, se envolvem apenas primeira derivada. São de segunda ordem sea segunda derivada também é necessária. A seguir, será descrita a condições deotimalidade para problemas com restrições baseadas em [8], onde são provadas.O cálculo diferencial dá apenas uma informação local sobre o problema e nãosão incluídas premissas de convexidade, apenas os mínimos relativos podem sercaracterizados.
O teorema a seguir dá uma interpretação geométrica das condições deotimalidade de uma grande classe de problemas.
Teorema 2.5.1. Condição necessária de primeira e segunda ordem. Se x∗ ∈ Ω éum mínimo local de f em Ω então, para qualquer direção viável d ∈ Rn, é
1. dt∇f(x∗) ≥ 0
2. Se dt∇f(x∗) = 0, então dt∇2f(x∗)d ≥ 0
O primeiro resultado significa que cada melhoria na direção de f em x∗ não éuma direção viável, que é F ∩D ≡ 0. Este é o caso mostrado na Figura 2.5, ondex∗ é um mínimo enquanto x não é. Na verdade, uma caminhada ao longo de d apartir de x, pode-se obter um novo ponto viável com menor f .
14

Figura 2.5: Ilustração da condição de otimalidade de primeira ordem. [7]
2.5.3 Otimização com restrição de desigualdade
Considera-se um problema com restrição de desigualdade o Problema 2.18.Chama-se I(x) ≡ i/gi(x) = 0 o Conjunto de Restrições Ativas em x e diz-se que xé um Ponto Regular se os vetores∇gi(x) para i ∈ I(x) são linearmente independente.O Número de Restrições Ativas em x é Card [I(x)].
É fácil de mostrar que se dt∇gi(x) < 0 para i ∈ I(x), então d representa umadireção viável das restrições em x.
Suponha agora que x∗, um ponto regular, é um mínimo local do Problema 2.18.É claro que x∗ é também um mínimo local de f(x) sujeito a gi(x) = 0, para i ∈ I(x∗).Então, existe um vetor λ∗ ∈ Rm tal que
∇f(x∗) +∇g(x∗)λ∗ = 0 (2.21)
onde λ∗ = 0 para i /∈ I(x∗).A condição λ∗ = 0 para i /∈ I(x∗) é chamado de Condição Complementaridade e
pode ser representada por meio das seguintes igualdades
λ∗i gi(x∗) = 0; para i = 1, 2, . . . ,m. (2.22)
Se for definido G(x) ≡ diag[g(x)], a matriz diagonal tal que Gii(x) = gi(x), acondição de complementaridade é expressa como:
G(x∗)λ∗ = 0 (2.23)
Uma condição adicional necessária,
λ∗ ≥ 0 (2.24)
é obtido como uma consequência do primeiro resultado do Teorema 2.5.1. Narealidade, supõe-se que a condição não é verdade. Então, para algum l ∈ I(x∗) tem-
15

se λ∗l < 0. Como x é um ponto regular, dado δi < 0, i ∈ I(x∗), pode-se encontraruma direção viável d verificando dt∇gi(x∗) = δi. Segue-se a partir da Equacão 2.21que
dt∇f(x∗) = −∑
i∈I(x∗),i 6=l
δiλ∗i − δlλ
∗l . (2.25)
Agora tomando δi, para i ∈ I(x∗) e i 6= l, pequeno o suficiente, pode-se obteruma possível direção d tal que dt∇f(x∗) < 0. Então, d é uma direção de descida def , mas esta conclusão está em contradição com o Teorema 2.5.1. Estes resultadosconstituem a condição de otimalidade de Karush-Kuhn-Tucker.
Teorema 2.5.2. Condição Necessária de Primeira Ordem. Sendo x∗, um pontoregular das restrições g(x) ≤ 0, sendo um Mínimo Local do Problema (2.18). Então,existe o vetor λ∗ ∈ Rm tal que
∇f(x∗) +∇g(x∗)λ∗ = 0G(x∗)λ∗ = 0λ∗ ≥ 0
g(x∗) ≤ 0.
(2.26)
Na Figura 2.6 tem-se o cone convexo de F ∗, definido por todas as combinaçõeslineares positivas dos gradientes das restrições ativas. O teorema anterior implicaque, se x∗ é um mínimo local, então −∇f(x∗) ∈ F ∗.
Figura 2.6: Ilustração da condição de Karush-Kuhn-Tucker. [7]
2.5.4 Métodos tipo Newton para sistemas não-lineares
Nesta seção, será discutido sobre métodos iterativos para resolver
φ(y) = 0 (2.27)
onde φ : Rn → Rn é continuamente diferenciável.
16

Reescrevendo 2.27 como:
y = y − φ(y) (2.28)
Para achar a solução de 2.27 pela Aproximações Sucessivas, é feito um teste iniciale substituições repetidamente no lado direito da equação 2.28 obtendo a sequência
yk+1 = yk − φ(yk) (2.29)
Sob condições adequadas, esta sequência converge para uma solução do sistema.
Algoritmo 1: Método de Aproximações Sucessivas1 Dado. Inicial y ∈ Rn
2 Passo 1. Cálculo do passo d.
d = −φ(y) (2.30)
3 Passo 2. Atualizary := y + d (2.31)
4 Passo 3. Voltar ao Passo 1.
O algoritmo acima é dito ser um Algoritmo de Ponto Fixo, porque se uma soluçãoé atingida, em seguida, d = 0 e o resto da sequência permanece inalterada.
Definindo uma função ψ(y) ≡ y−φ(y). O teorema que se segue dá condições paraa convergência global e resultados sobre a velocidade da convergência do Algoritmo1.
Teorema 2.5.3. Sendo ‖∇ψ(y) ≤ α < 1‖ em Rn, então há uma solução única paray∗ em 2.27 e a sequência gerada pelo Método de Aproximações Sucessivas convergepara y∗ para qualquer y0 ∈ Rn inicial. A ordem de convergência é linear e a taxa éigual a α.
Os pressupostos do teorema anterior restringi a aplicação do método deaproximações sucessivas a uma determinada classe de problemas. Na Figura 2.7, oprocesso de resolução de uma equação unidimensional é ilustrado. Isto é equivalentea encontrar o ponto de intersecção de z = ψ(y) com z = y. Na Figura 2.7.a ainclinação de ψ(y) é menor do que a unidade e as iterações convergem, enquantoo processo em 2.7.b diverge. Desde que a ordem de convergência seja linear, oAlgoritmo 1 é também chamado Algoritmo de Iterações Linear.
17

(a) (b)
Figura 2.7: Ilustração do método de aproximações sucessivas. [7].
Sendo yk uma estimativa de y∗. Na vizinhança de yk, tem-se
φ(y) ≈ φ(yk) +∇φ(yk)t(y − yk).
Então, a melhor estimativa yk+1 pode ser obtida fazendo
φ(yk) +∇φ(yk)t(yk+1 − yk) = 0, (2.32)
que define o método iterativo de Newton.
Algoritmo 2: Método de Aproximações Sucessivas1 Dado. Inicial y ∈ Rn
2 Passo 1. Cálculo do passo d. Resolver o sistema linear para d
[∇φ(y)]td = −φ(y) (2.33)
3 Passo 2. Atualizary := y + d
4 Passo 3. Voltar ao Passo 1.
O processo do método de Newton é ilustrado na Figura 2.8. A uma dadaestimativa de y∗,a função é aproximada por sua tangente. Uma nova estimativaé então feita no ponto em que a tangente cruza o eixo y.
18

Figura 2.8: Iterações de Newton. [7]
O teorema abaixo dá as condições para a convergência local e a velocidade deconvergência.
Teorema 2.5.4. Seja φ(y) continuamente diferenciável duas vezes e y∗ a solução deφ(y) = 0. Assumindo que ∇φ(y∗)−1 existe. Então se começou próximo o suficientepara y∗, o Algoritmo 2 não falha e gera uma sequência que converge pra y∗. Aconvergência é de pelo menos quadrática.
O algoritmo não falha se 2.33 tem uma única solução. Grande vantagem destemétodo vem de sua velocidade de convergência. No entanto, exige a avaliação doJacobiano ∇φ e da solução de um sistema linear em cada iteração, o que pode sermuito caro em termos de tempo computacional . Além disso, a convergência globalnão está garantida. O Jacobiano analítico pode ser substituído pela aproximaçãopor diferenças finitas, mas este também é dispendioso, uma vez são necessários navaliações adicionais da função por iteração.
2.5.5 Algoritmo Quase-Newton
Com o objetivo de reduzir o esforço computacional, o método de quase - Newtongera uma aproximação do Jacobiano ou do seu inverso. A ideia básica da maioriadas técnicas do quase - Newton é tentar construir uma aproximação do Jacobiano,ou do seu inverso, usando informações recolhidas como o progresso repete. Seja BK
a aproximação atual de ∇φ(yk), uma nova aproximação Bk+1 é obtida a partir
Bk+1 = Bk + ∆Bk. (2.34)
19

Desde que
φ(yk+1)− φ(yk) ≈ ∇(yk)t(yk+1 − yk) (2.35)
∆Bk é definida de tal maneira que
φ(yk+1)− φ(yk) ≈ [Bk+1]t(yk+1 − yk). (2.36)
A substituição de 2.34 em 2.36 dá n condições para serem satisfeitas por ∆Bk.O ∆Bk tem n2 elementos, estas condições não são suficientes para determiná-lo.Foram propostas várias regras de atualização para Bk+1, sendo a Regra de Broydena mais bem sucedida,
Bk+1 = Bk + (γ −Bkδ)δt
δtδ, (2.37)
onde δ = yk+1 − yk e γ = φ(yk+1)− φ(yk).
Algoritmo 3: Método de Quase-Newton1 Dado. Inicial y ∈ Rn e B ∈ Rn×n
2 Passo 1. Cálculo do passo d. Resolver o sistema linear para d
Btd = −φ(y). (2.38)
3 Passo 2. Atualizary := y + d
eB := B + ∆B. (2.39)
4 Passo 3. Voltar ao Passo 1.
No Passo 2, B pode ser atualizado usando 2.37 ou outras regras.
Teorema 2.5.5. Seja φ(y) continuamente diferenciável duas vezes e y∗ a solução deφ(y) = 0. Assumindo que ∇φ(y∗)−1 existe. Então se começou próximo o suficientepara y∗ e o B inicial for próximo o suficiente de ∇φ(y∗), o Algoritmo 3 não falha egera uma sequência que converge para y∗. A convergência é superlinear.
Embora o método de quase - Newton tenha a vantagem de evitar o cálculode ∇φ(y), o B inicial deve ser uma boa aproximação de ∇φ(y) para ter umaconvergência local.
Olhando para Algoritmos de 1 a 3 nota-se que eles têm uma estrutura semelhante.
20

Todos eles definem um passo pela expressão
Sd = −φ(y), (2.40)
onde S ≡ I nas iterações lineares, S é uma aproximação de ∇φ(y) no métodode quase - Newton ou S ≡ ∇φ(y) no método de Newton. A taxa de convergênciavai desde linear até quadrática.
2.5.6 Busca linear de Armijo
Um critério prático e popular de busca linear é a regra de Armijo. A ideiaessencial é que a regra deve primeiro garantir que o α selecionado não seja muitogrande, e o próximo não deve ser muito pequeno. Definindo a função
Φ(α) = f(xk + αdk) (2.41)
a regra de Armijo é implementada pela consideração da função φ(0) + εφ′(0)α paraε no intervalo 0 < ε < 1. Esta função é representada na Figura 2.9, como a linhatracejada. Um valor de α é considerado como sendo não muito grande se o valor dafunção correspondente encontra-se abaixo da linha tracejada; isto é, se
φ(α) ≤ φ(0) + εφ′(0)α (2.42)
Para garantir que α não seja muito pequeno, um valor η > 1 é selecionado, e αé então considerado como não sendo muito pequeno se
φ(ηα) > φ(0) + εφ′(0)ηα (2.43)
Isto significa que se α é aumentado pelo fator η, ele não vai conseguir cumprir oteste 2.42. A região aceitável definido pela regra Armijo é mostrado na Figura 2.9quando η = 2.
Por vezes, na prática, o teste Armijo é utilizado para definir uma técnica debusca linha simplificada que não emprega métodos de ajuste de curvas. Começa-secom um α arbitrário. Se (2.42) for satisfeito, é repetidamente aumentado por η(η = 2 ou η = 10 e ε = 0, 2 são frequentemente utilizados) até quando (2.42) nãofor satisfeito, e então o penúltimo α é selecionado. Se, por outro lado, o α originalnão satisfizer (2.42), então é dividido por várias vezes pelo η até que o α resultantesatisfaça (2.42).[8]
21
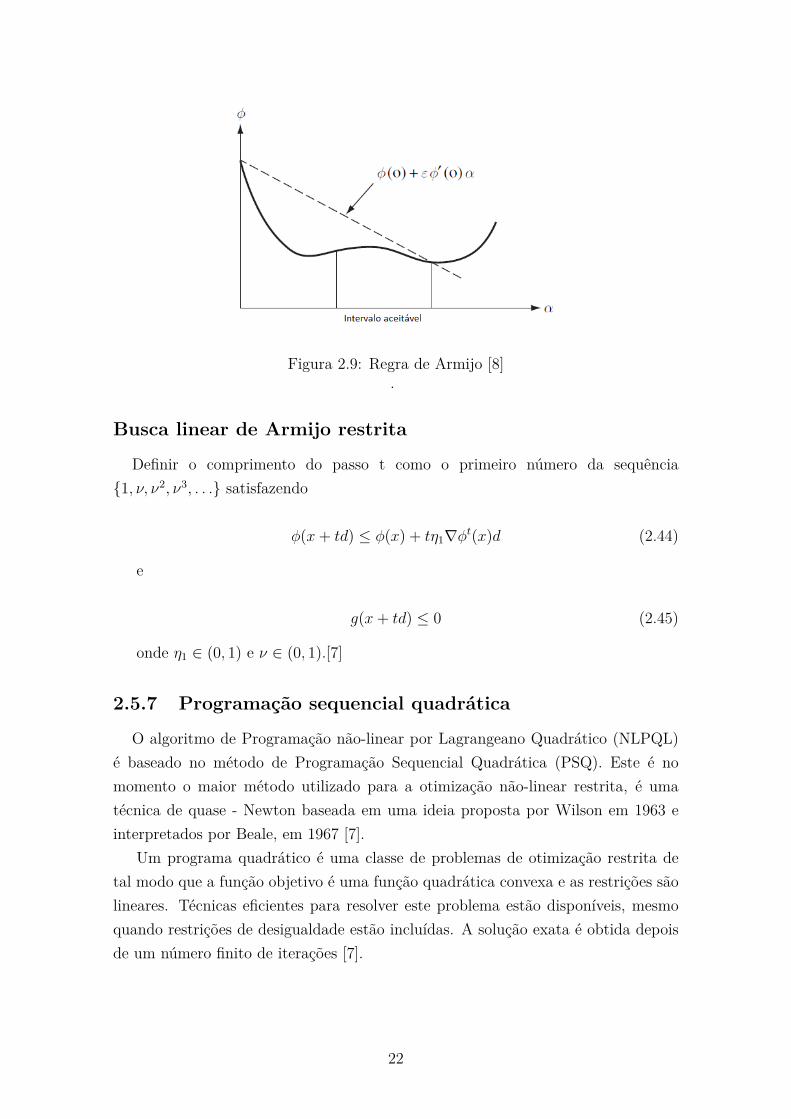
Figura 2.9: Regra de Armijo [8].
Busca linear de Armijo restrita
Definir o comprimento do passo t como o primeiro número da sequência1, ν, ν2, ν3, . . . satisfazendo
φ(x+ td) ≤ φ(x) + tη1∇φt(x)d (2.44)
e
g(x+ td) ≤ 0 (2.45)
onde η1 ∈ (0, 1) e ν ∈ (0, 1).[7]
2.5.7 Programação sequencial quadrática
O algoritmo de Programação não-linear por Lagrangeano Quadrático (NLPQL)é baseado no método de Programação Sequencial Quadrática (PSQ). Este é nomomento o maior método utilizado para a otimização não-linear restrita, é umatécnica de quase - Newton baseada em uma ideia proposta por Wilson em 1963 einterpretados por Beale, em 1967 [7].
Um programa quadrático é uma classe de problemas de otimização restrita detal modo que a função objetivo é uma função quadrática convexa e as restrições sãolineares. Técnicas eficientes para resolver este problema estão disponíveis, mesmoquando restrições de desigualdade estão incluídas. A solução exata é obtida depoisde um número finito de iterações [7].
22

Para resolver o seguinte problema
minimizex∈Ω
f(x)
sujeito a: hi(x) = 0, i = 1, . . . , pgj(x) ≤ 0, j = 1, . . . , q
(2.46)
Wilson propôs para definir a direção de busca d e novas estimativas dosmultiplicadores de Lagrangeλ e µ resolvendo a cada iteração
minimize 12d
tSd+∇f t(x)dsujeito a: ∇gt(x)d+ g(x) ≤ 0
∇ht(x)d+ h(x) = 0.(2.47)
Wilson é um algoritmo de Newton. A função penalidade exata é:
φ(x, s, r) = f(x) +m∑
i=1si sup[0, gi(x)]+
p∑i=1
ri ‖hi(x)‖ (2.48)
e é tomada como o objetivo da busca linear. Se r satisfaz a seguinte condição:
ri ≥∥∥∥µk+1
i
∥∥∥ ; i = 1, 2, . . . , p. (2.49)
onde ri são constantes positivas e
si ≥ λi, para i = 1, 2, . . . ,m, (2.50)
então d que resolve 2.47 e é uma direção de descida de φ(x, s, r).Em algoritmos de programação quadrática sequencial, a matriz S é definida
como uma aproximação quase - Newton da Hessiana do Lagrangeano. A maioria dosotimizadores empregam a regra BFGS modificado. Algoritmo SQP pode afirmar-secomo se segue,
23

Algoritmo 4: Programação Sequencial Quadrática1 Parâmetros. r ∈ Rp e s ∈ Rm positivos.2 Dado. Inicializar x ∈ Rn e B ∈ Rn×n simétrica e definida positiva.3 Passo 1. Cálculo da direção de busca d e uma estimativa dos multiplicadoresde Lagrange λ e µ. Resolver o sistema linear para d
minimize 12d
tSd+∇f t(x)dsujeito a: ∇gt(x)d+ g(x) ≤ 0
∇ht(x)d+ h(x) = 0.(2.51)
4 Passo 2. Busca linear
i) Se ri ≤ ‖µi‖, em seguida definir ri > ‖µi‖, para i = 1, 2, . . . , p.
ii) Se si ≤ λ, em seguida definir ri > λ, para i = 1, 2, . . . ,m.
iii) Encontre um comprimento do passo t satisfazendo um determinadocritério de busca de linear na função auxiliar
φ(x, s, r) = f(x) +m∑
i=1si sup[0, gi(x)]+
p∑i=1
ri ‖hi(x)‖
Passo 3. Atualizações.Seja δ = td e γ = ∇xl(x+ td, λ, µ)−∇xl(x, λ, µ).
i) Se δtγ < 0.2δtBδ, então calcule
φ = 0.8δtBδ
δtBδ − δtγ
e defina γ = φγ + (1− φ)Bδ.
ii) Definir
B := B + γγt
δtγ− BδδtB
δtBδ
e x := x+ td
Passo 4. Retornar ao Passo 1.
Este algoritmo gera sequências que são globalmente convergente para Karush- Tucker - Kuhn. No entanto, falha em pontos onde o programa quadrática nãotem uma solução. Na realidade, uma vez que as restrições do programa quadráticoresolvido no Passo 1 são aproximações lineares das restrições do problema original,a região viável pode estar vazia.
24

2.5.8 Programação não-linear por Lagrangeano Quadrático
Considere o seguinte problema de otimização não-linear de um único objetivo.Supõe-se que o problema é suave e analítico com N variáveis de decisão.
minimize f (x)sujeito a gk (x) ≤ 0, ∀ k = 1, 2, . . . , K
hl (x) = 0, ∀ l = 1, 2, . . . , Londe xL ≤ x ≤ xU
(2.52)
Onde, K e L são os números de restrições de desigualdade e igualdade,respectivamente. Em muitos casos, as restrições de desigualdade apresentam limitessuperiores e inferiores, em tais casos, costuma-se dividir em duas restrições dedesigualdade. A fim de aproximar o subproblema quadrático assumindo a presençade apenas restrições de igualdade, o Lagrangeano para equação (2.52) é:
Λ (x,λ) = f (x) + λTh (x) (2.53)
Onde, λ é um vetor L dimensional (não nulo), que são utilizados comomultiplicadores de Lagrange. Assim, a equação (2.53) torna-se uma função, quedepende de dois conjuntos de vetores independentes. A fim de minimizar estaexpressão, procuramos a estacionaridade da presente função no que diz respeitoaos dois conjuntos de vetores. Essas expressões dão origem a dois conjuntos deexpressões de vetor como:
Λ (x,λ)x = ∇Λ = ∇f +Hλ = 0Λ (x,λ)λ = h (x) = 0
(2.54)
A equação (2.54) define as condições Karush-Kuhn-Tucker (KKT), que sãoas condições necessárias para a existência do ponto ótimo. A primeira equaçãocompreende N equações algébricas não-lineares e a segunda compreende L equaçõesalgébricas não-lineares. A matriz de H é uma matriz (N × L) definida como:
H(N×L) = [∇h1(x),∇h2(x),∇h3(x), . . .] (2.55)
Assim, na equação (2.55), cada coluna é um gradiente da restrição de igualdadecorrespondente. Por conveniência, as equações não-lineares (2.54) podem ser escritascomo a seguinte:
F (Y) = 0 (2.56)
Onde, a equação (2.56) é um sistema de (N + L) equações não-lineares. O
25

conjunto de variáveis independentes Y pode ser escrito como:
Y =xλ
(2.57)
enquanto o conjunto funcional F é escrito da seguinte forma:
F =∇Λ
h
(2.58)
Referindo-se à seção baseada nos métodos de Newton, o vetor Y na equação(2.57) é atualizado como o seguinte:
Yj+1 = Yj + ∆Yj (2.59)
O incremento do vetor é dado pelo esquema iterativo de Newton. Referindo-se aequação (2.56), a equação (2.57) e a equação (2.58), a equação iterativa é expressacomo o seguinte:
∇Fj∆Yj = −F (Yj) (2.60)
Note-se que esta é apenas uma aproximação de primeira ordem da expansão deTaylor da equação (2.56). Isto é um contraste com a aproximação quadrática eocorre porque na equação (2.57), a aproximação de primeira ordem já foi feita. Asmatrizes e os vetores na equação (2.60) podem ser expandidas conforme a seguir:
Y =∆x
∆λ
(2.61)
e
∇F =∇2Λ(N×N) H(N×L)
HT(L×N) 0(L×L)
N+L×(N+L)
(2.62)
Esta é obtida tomando os gradientes da equação (2.58) no que diz respeito aosdois conjuntos de variáveis.
A sub-matriz [∇2Λ](N×N) é a (N ×N) função de Lagrange da Hessiana na formaimplícita.
A equação (2.60) pode ser reescrita como se segue:
∇2ΛN×N HN×L
HTL×N 0L×L
j ∆x∆λ
j
= −∆Λh
j
(2.63)
A solução da equação (2.63) irá resolver a equação (2.64) iterativamente emuma série de passos lineares até o ponto em que o incremento é negligenciável. Os
26

esquemas de atualização para a variável independente e os vetores multiplicadoresde Lagrange x e λ são escritos como o seguinte:
xj+1 = xj + ∆xj
λj+1 = λj + ∆λj
(2.64)
As equações individuais da equação (2.63)são agora escritas separadamente. Aprimeira equação (correspondente a minimização em relação a x) pode ser escritacomo:
∇2Λj∆xj + Hj∆λj = −∇Λj
∇2Λj∆xj + Hj∆λj = −∇fj −Hjλj
∇2Λj∆xj + Hjλj+1 = −∇fj
(2.65)
O último passo na equação (2.65) é feito por meio da equação (2.64). Assim,através da equação (2.65) e a equação (2.63), o esquema iterativo pode ser reescritode uma forma simplificada como:
∇2Λ(N×N) H(N×L)
HT(L×N) 0(L×L)
(j)∆x(j)
λ(j+1)
= −∆f
h
(j)
(2.66)
Assim, a equação (2.66) pode ser utilizada diretamente para calcular o (j + 1)−ésimo valor do vetor multiplicador de Lagrange. Note-se que, utilizando estaequação, é possível calcular a atualização de x e o novo valor do vetor multiplicadorde Lagrange λ na mesma etapa iterativa. A equação (2.66) mostra o esquema geralem que a condição de otimalidade KKT pode ser resolvida de forma iterativa paraum problema de otimização generalizado.
Agora, considerando o problema de aproximação quadrática dado por:
Q = ∇fT ∆x + 12∆xT [∇2Λ]∆x (2.67)
Sujeito às restrições de igualdade dadas pelo seguinte:
h(L×1) +HT(L×N)∆x = 0 (2.68)
Onde a definição das matrizes na equação (2.67) e na equação (2.68) são dadasanteriormente. A fim de resolver o problema de minimização quadrática, forma-seo Lagrangeano como:
Γ = ∇fT ∆x +(1
2
)∆xT∇2Λ∆x + λT h + λT HT ∆x (2.69)
Agora, as condições KKT podem ser derivadas (como feito anteriormente),
27

tomando os gradientes do Lagrangeano da equação (2.69) como o seguinte:
Γ∆x = ∇f +∇2Λ∆x + Hλ = 0Γλ = h + HT ∆x = 0
(2.70)
Em uma forma matricial condensada a equação (2.70) pode ser escrita como aseguinte: ∇2Λ H
HT 0
∆xλ
= −∆f
h
(2.71)
A equação (2.71) é a mesma que a equação (2.66), isto implica que o esquemaiterativo na equação (2.71), que na verdade resolve um subproblema quadrático(equação 2.67 e 2.68) no domínio ∆x. No caso, o problema real é quadrático, entãoeste esquema iterativo resolve o problema exato.
Por adição de restrições de desigualdade, o Lagrangeano do problema real podeser escrito como o seguinte:
Λ (x,λ,µ,y) = f (x) + λTh (x) + µT g (x) + µT y2 (2.72)
Nota-se que as restrições de desigualdade foram convertidas em restrições deigualdade, utilizando um conjunto de variáveis de folga y da seguinte maneira:
gk (x) + (yk)2 = 0,∀k = 1, 2, . . . ,M (2.73)
O termo quadrado é usado para garantir que a variável de folga permaneçapositiva que é necessário para satisfazer a equação (2.73). O Lagrangeano na equação(2.72) atua como uma função objetivo reforçada. Vê-se que o único caso em que ostermos adicionais podem ser ativos é quando as restrições não estão satisfeitas.
As condições KKT como derivados a partir da equação (2.72) (tomando asprimeiras variações no que diz respeito ao vetores de variáveis independentes) são:
Λx = ∇Λ = ∇f + Hλ+ Gµ = 0(N×1)
Λλ = h (x) = 0(L×1)
Λµ = g (x) = y2 = 0(M×1)
Λy = 2yµ = 0(M×1)
(2.74)
A partir das condições KKT na equação (2.74), é evidente que existem (N +L+2 ∗M) equações para um número semelhante de desconhecidos, assim este conjuntode equação possui uma solução única. Deixe esta solução (ideal) ser marcada comox. Neste ponto, um certo número de restrições será ativa e alguns outras serãoinativas. Deixe o número de restrições de desigualdade ativas ser p e o númerototal de restrições de igualdade ativos ser q. Por uma restrição ativa presume-se
28

que a restrição está no seu valor de limiar de zero. Assim, J1 e J2 são os conjuntosde restrições de igualdade ativos e inativos (respectivamente) e K1 e K2 são osconjuntos de restrições de desigualdade ativas e inativas, respectivamente. Logo,pode ser escrito as seguintes relações:
J1 ∩ J2 = ø; meas(J1⋃J2) = L; meas(J1) = q; meas(J2 = (L− q))
K1 ∩K2 = ø; meas(K1⋃K2) = M ; meas(K1) = p; meas(K2 = (M − q))
(2.75)Onde, meas () indica a contagem dos elementos do conjunto em questão. Estes
conjuntos particionam as restrições em conjuntos ativos e inativos. Assim:
hk(x) = 0, ∀k ∈ J2
gj(x) = 0, yj = 0;µj 6= 0; ∀j ∈ K1
gj(x) < 0, yj 6= 0;µj = 0; ∀j ∈ K1
(2.76)
Assim, pode-se afirmar que as últimas três equações na equação (2.74) podeser representada pela equação (2.76). Estas são as condições de otimização parasatisfazer as restrições. A partir dessas equações, y pode ser eliminado tal queo Lagrangeano na equação (2.72) dependerá apenas de 3 vetores de variáveisindependentes. A partir das duas últimas condições na equação (2.76), pode serescrita a seguinte condição, que é sempre válida para um ponto ótimo:
µjgj(x) = 0 (2.77)
Usando a equação (2.77) no conjunto de equações (2.74), as condições deotimalidade de KKT podem ser escrita da seguinte forma:
∇Λ = f + Hλ+ Gµ = 0(N×1)
h (x) = 0(L×1)
µg (x) = 0(M×1)
(2.78)
Assim, o novo conjunto contém apenas (N+L+M) incógnitas. Agora, seguindoa mesma lógica que a equação (2.57), como feito anteriormente, irá ser expressa aequação (2.78), da mesma forma como na equação (2.56). Isto representa um sistemade (N+L+M) equações não lineares. O conjunto de variáveis independentes podemser escritos em forma de vetor como :
Y =
xλ
µ
(2.79)
O esquema iterativo de Newton também é usado aqui, portanto, as mesmas
29

equações como na equação (2.59) e equação (2.60) também se aplicam. Assim,seguindo a equação (2.60), tem-se:
∆Y =
∆x∆λ∆µ
(2.80)
Tomando a primeira variação das equações KKT na equação (2.78) e igualandoa zero, a equação subquadrática é formulada como:
∇2Λ HT GT
H 0 0µG 0 g
∂x
∂λ
∂µ
= −
∇Λhµg
(2.81)
Onde µ indica uma matriz diagonal.No passo j-ésimo, a primeira equação pode ser escrita como (por linearização):
∇2Λj∆xj + Hj∆λj + Gj∆µj = −∇fj −Hj∆λj −Gjµj (2.82)
Que implica em:
∇2Λj∆xj + Hjλj+1 + Gjµj+1 = −∇fj (2.83)
Assim, o conjunto linear de equações para o método de Newton para ser aplicadopode ser escrito de forma explícita como:
∇2Λ HTj GT
j
Hj 0 0µjGj 0 gj
∆xj
λj+1
µj+1
= −
∇fj
hj
2µgj
(2.84)
Assim, na presença de ambas as restrições de igualdade e desigualdade, a equação(2.84) pode ser usada em um quadro quasi-Newton para determinar os incrementos∆xj e multiplicadores de Lagrange λj+1 e µj+1 passando da iteração j para j + 1.A matriz Hessiana ∇2Λ não é calculada diretamente, mas é estimada e atualizadaem uma pesquisa de linha tipo BFGS.[9]
30

Capítulo 3
Análises preliminares
Este capítulo tem como objetivo fazer um estudo dos tipos de elementos finitosdisponíveis no Ansys Workbench. Para tal fim, será feita uma descrição desteselementos e através de análises estáticas de um problema estrutural clássico (viga embalanço) e análises modais, será comparado os resultados com as soluções analíticase selecionado o tipo de elemento mais adequado.
A geometria para a análise foi gerada no SolidWorks empregando dois tiposde elementos finitos: sólido e casca. Para conseguir um elemento sólido ou casca,a geometria é gerada de maneira diferente, por exemplo, para trabalhar com umelemento sólido a geometria tem que ser gerada com uma extrusão (Figura 3.1a),entretanto, para um elemento casca a geometria tem que ser gerada com umasuperfície (Figura 3.1b). O Ansys permite a importação dessa geometria atravésde um plug-in.
(a) Elemento sólido (b) Elemento casca
Figura 3.1: Tipos de elementos.
3.1 Descrição dos elementos finitos
Ansys Workbench dispõe de diferentes tipos de elementos finitos segundo o tipode análise a ser realizado. Cada elemento finito possui certa característica que
31

o diferencia dos outros. Em particular, serão descritos os elementos sólidos e oselementos de casca que podem ser utilizados em uma análise estática e modal.
3.1.1 Solid 185
O elemento Solid 185 é usado para modelagem 3-D de estruturas sólidas. Édefinido por oito nós com três graus de liberdade em cada nó: a translação nas di-reções nodais x, y e z. O elemento tem plasticidade, hiperelasticidade, deformação,grande deflexão, e grandes capacidades de deformação. Ele também tem a capa-cidade de formulação mista para simular deformações dos materiais elastoplásticosquase incompressíveis e materiais hiperelásticos totalmente incompressíveis [10].
Figura 3.2: Elemento Solid185.
3.1.2 Solid 186
O elemento Solid 186 é um elemento sólido 3-D com 20 nós de ordem superiorque exibe comportamento de deslocamento quadrático. O elemento é definido por20 nós com três graus de liberdade por nó: a translação nas direções nodais x, y ez.
Figura 3.3: Elemento Solid186.
32
O elemento suporta plasticidade, hiperelasticidade, deformação, grande deflexão,e grandes capacidades de deformação. Ele também tem a capacidade de formulaçãomista para simular deformações dos materiais elastoplásticos quase incompressíveise materiais hiperelásticos totalmente incompressíveis [10].
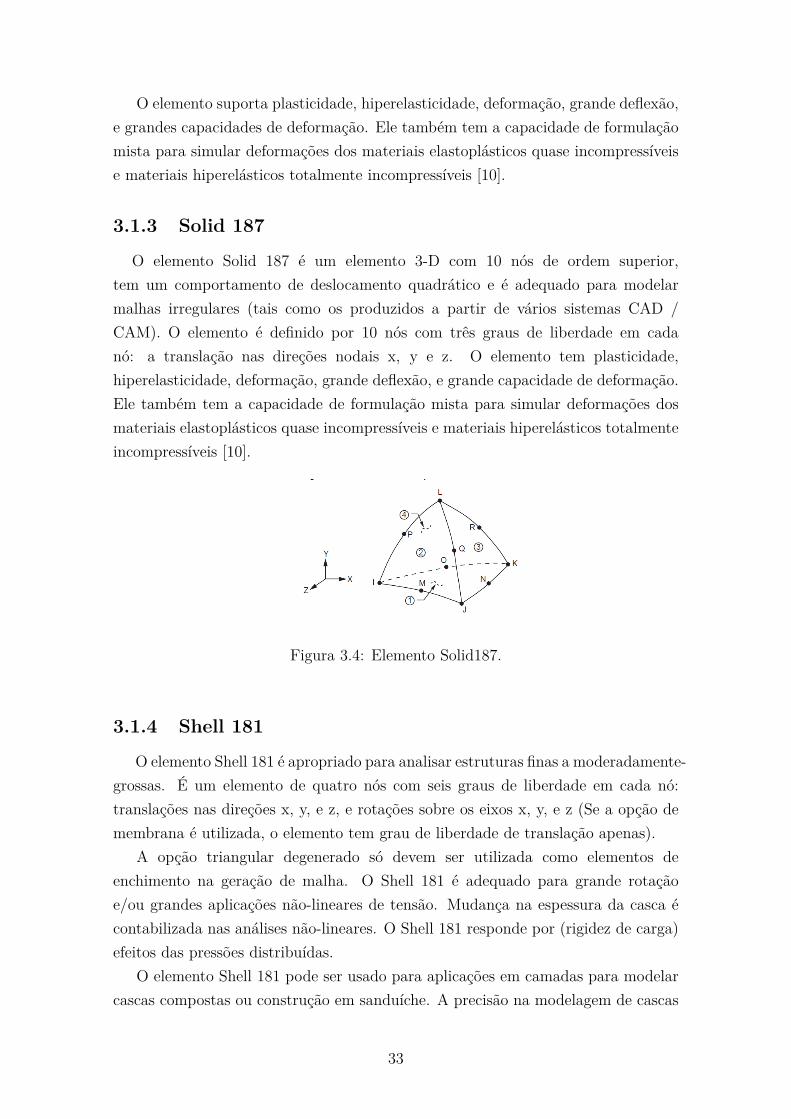
3.1.3 Solid 187
O elemento Solid 187 é um elemento 3-D com 10 nós de ordem superior,tem um comportamento de deslocamento quadrático e é adequado para modelarmalhas irregulares (tais como os produzidos a partir de vários sistemas CAD /CAM). O elemento é definido por 10 nós com três graus de liberdade em cadanó: a translação nas direções nodais x, y e z. O elemento tem plasticidade,hiperelasticidade, deformação, grande deflexão, e grande capacidade de deformação.Ele também tem a capacidade de formulação mista para simular deformações dosmateriais elastoplásticos quase incompressíveis e materiais hiperelásticos totalmenteincompressíveis [10].
Figura 3.4: Elemento Solid187.
3.1.4 Shell 181
O elemento Shell 181 é apropriado para analisar estruturas finas a moderadamente-grossas. É um elemento de quatro nós com seis graus de liberdade em cada nó:translações nas direções x, y, e z, e rotações sobre os eixos x, y, e z (Se a opção demembrana é utilizada, o elemento tem grau de liberdade de translação apenas).
A opção triangular degenerado só devem ser utilizada como elementos deenchimento na geração de malha. O Shell 181 é adequado para grande rotaçãoe/ou grandes aplicações não-lineares de tensão. Mudança na espessura da casca écontabilizada nas análises não-lineares. O Shell 181 responde por (rigidez de carga)efeitos das pressões distribuídas.
O elemento Shell 181 pode ser usado para aplicações em camadas para modelarcascas compostas ou construção em sanduíche. A precisão na modelagem de cascas
33

Figura 3.5: Elemento Shell181.
compostas é regida pela teoria tensão-deformação de primeira ordem (geralmentereferido como teoria shell Mindlin-Reissner).
A formulação do elemento é baseada na estirpe logarítmica e medidas detensão verdadeiras. A cinemática do elemento permiti alongamento, no entanto, asmudanças de curvatura dentro de um incremento de tempo são assumidas pequenas[10].
3.1.5 Shell 281
O elemento Shell281 é apropriado para analisar estruturas finas a moderadamentegrossas. O elemento tem oito nós com seis graus de liberdade em cada nó: translaçãonos eixos x, y, e z, e rotações sobre os eixos x, y, e z. (Ao usar a opção de membrana,o elemento tem graus de liberdade de translação apenas.)
Figura 3.6: Elemento Shell281.
O elemento Shell281 é bem adequado para grande rotação e/ou grandesaplicações não-lineares de tensão. Mudança na espessura da casca é contabilizadanas análises não-lineares. O elemento é responsável por (rigidez de carga) efeitosdas pressões distribuídas.
Esse elemento pode ser usado para aplicações em camadas para modelar cascascompostas ou construção em sanduíche. A precisão na modelagem de cascas
34
compostas é regida pela teoria tensão-deformação de primeira ordem (geralmentereferido como teoria shell Mindlin-Reissner).
A formulação do elemento é baseada na estirpe logarítmica e medidas detensão verdadeiras. A cinemática do elemento permiti alongamento, no entanto, asmudanças de curvatura dentro de um incremento de tempo são assumidas pequenas[10].
3.2 Seleção do elemento a ser usado nas análisesdo Ansys
3.2.1 Descrição do problema de análise estática
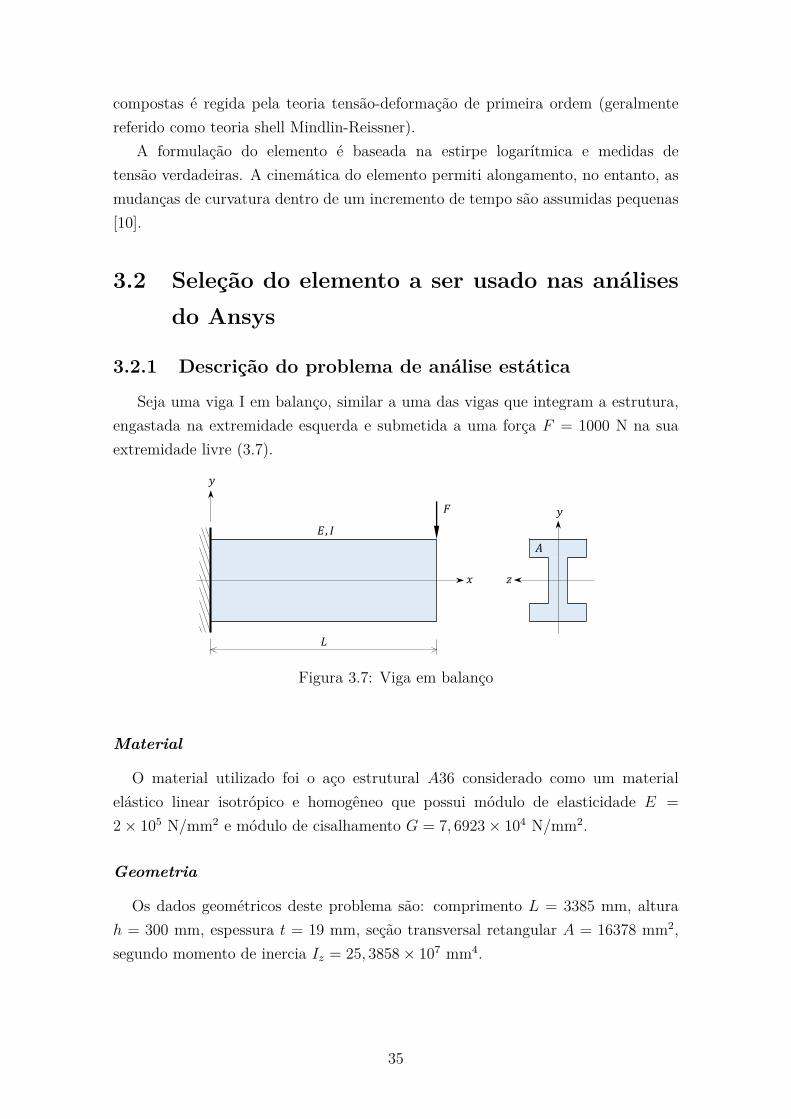
Seja uma viga I em balanço, similar a uma das vigas que integram a estrutura,engastada na extremidade esquerda e submetida a uma força F = 1000 N na suaextremidade livre (3.7).
𝐹
𝑥
𝑦
𝐿
𝐸, 𝐼
𝑦
𝐴
𝑧
Figura 3.7: Viga em balanço
Material
O material utilizado foi o aço estrutural A36 considerado como um materialelástico linear isotrópico e homogêneo que possui módulo de elasticidade E =2× 105 N/mm2 e módulo de cisalhamento G = 7, 6923× 104 N/mm2.
Geometria
Os dados geométricos deste problema são: comprimento L = 3385 mm, alturah = 300 mm, espessura t = 19 mm, seção transversal retangular A = 16378 mm2,segundo momento de inercia Iz = 25, 3858× 107 mm4.
35

Solução analítica segundo a teoria de vigas
A solução analítica de uma viga em balanço considerando a teoria de vigas [11]estabelece os seguintes cálculos:
Equação do momento fletor
As reações na extremidade esquerda da viga são determinadas através da estática,assim para determinar a força de reação no engaste temos que:
∑Fy = 0 : R = F (3.1)
e o momento flexor no engaste é definido por:
∑Mz = 0 : MR = FL (3.2)
A partir do diagrama de corpo livre da Figura 3.8 e fazendo equilíbrio demomentos em relação ao eixo z temos que:
∑Mz = 0 : M + FL− Fx = 0
𝐹
𝑥
𝑉
𝑀
𝐹𝐿
𝑦
𝑥
Figura 3.8: Diagrama de corpo livre
Desta maneira, a equação do momento flexor da viga para 0 6 x 6 L é dadapor:
M = −FL+ Fx (3.3)
Tensão de flexão de tração
Nas análises de vigas pretende-se determinar as tensões de flexão de tração. Estastensões são máximas na seção onde atua o momento fletor máximo, neste caso naseção do engaste, ou seja, na extremidade esquerda tal como é mostrada na Figura3.9.
36

𝐹
𝑥
𝑦
𝐿
𝐸, 𝐼
𝑦
𝐴
𝑧
𝑐1
𝑐2
𝜎𝑡
𝜎𝑐 𝑀
Figura 3.9: Tensões de flexão
Os valores destas tensões dependem da distância c das fibras externas à linhaneutra. A distância c1 é usada para determinar a tensão máxima de tração e adistancia c2 no caso da tensão máxima de compressão, assim:
σt = Mzc1
Iz
(3.4)
σc = Mzc2
Iz
(3.5)
Tensão de cisalhamento
Conforme descrito em [12], considerando um segmento de viga submetido a umaforça de cisalhamento V e a um momento fletor M em x, a equação da tensão decisalhamento é descrita da seguinte forma:
τ = V
Ib
∫ c
y1ydA (3.6)
onde os limites de integração estão definidos na Figura 3.10.
Figura 3.10: Seção da viga isolada.
Nessa equação, a integral é o primeiro momento de área A′ em relação ao eixoneutro. Normalmente, essa integral é designada como Q. Portanto,
37

Q =∫ c
y1ydA = y′A′
em que, para a área isolada de y1 até c, y′ é a distância na direção y a partir doplano neutro ao centroide da área A′. Com isso a Equação 3.6 pode ser escrita como
τ = V Q
Ib
Ao usar essa equação, b é a largura da seção em y = y1. Da mesma forma, I é omomento de inércia de área de toda a seção em torno do eixo neutro.
Em vigas de Perfil I ou H (Figura 3.11), o primeiro momento de área na almada viga é calculado da seguinte maneira:
𝜏𝑚á𝑥 𝜏1
𝑦
𝑧
ℎ1/2
ℎ1/2
ℎ
𝑒
𝑡
𝑡
𝑦1
𝑏
𝜏𝑚𝑖𝑛 𝜏1
Figura 3.11: Perfil I
Q = b
2
(h2
4 −h2
14
)+ e
2
(h2
14 − y
21
)
Então, a tensão de cisalhamento τ na alma da viga é
τ = V
Ie
[b
2
(h2
4 −h2
14
)+ e
2
(h2
14 − y
21
)]
O primeiro momento de área na aba do perfil é calculado da seguinte forma:
Q = 12
(b
2 − z)(
h2
4 −h2
14
)
Logo, a tensão de cisalhamento τ na aba da viga é:
τ = V
It
[12
(b
2 − z)(
h2
4 −h2
14
)]
A distribuição de tensão de cisalhamento no perfil fica a seguinte:
38

𝜏1
𝜏2 𝜏1
𝜏𝑚á𝑥 𝜏1
Figura 3.12: Distribuição de tensão de cisalhamento
Tensão equivalente de Von Mises
A tensão de Von Misses leva em conta seis componentes do estado geral de tensõese pode ser calculada pela seguinte equação:
σeq =√
12[(σx − σy)2 + (σx − σz)2 + (σy − σz)2
]+ 3
(τ 2
xy + τ 2xz + τ 2
yz
)(3.7)
A tensão de Von Misses é utilizada como critério de falha para materiaiselastoplásticos, onde ocorrerá uma falha no material se σeq ≥ Sy, sendo Sy aresistência do material ao escoamento.
3.2.2 Descrição do problema de análise modal
Seja uma viga em balanço, engastada na extremidade esquerda, como é mostradana Figura 3.13.
Figura 3.13: Viga em balanço para o problema da análise modal.
39
Material
O material utilizado foi o aço estrutural A36 considerado como um materialelástico linear isotrópico e homogéneo que possui um módulo de elasticidade E =2 × 105 N/mm2, um módulo de cisalhamento G = 7, 6923 × 104 N/mm2 e umadensidade ρ = 7, 850× 10−6 Kg/mm3.
Geometria
Os dados geométricos para este problema são: comprimento L = 1250 mm,altura h = 10 mm, espessura t = 10 mm, seção transversal A = 100 mm2 e segundomomento de inércia I = 833, 33 mm4.
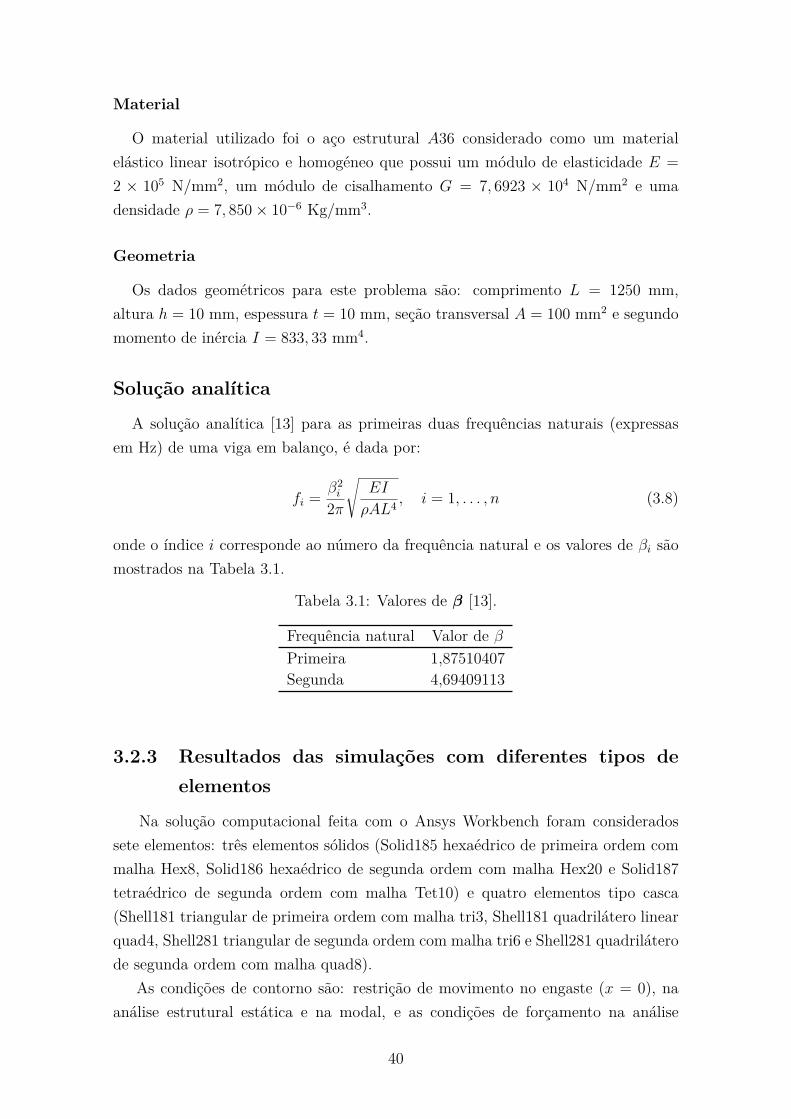
Solução analítica
A solução analítica [13] para as primeiras duas frequências naturais (expressasem Hz) de uma viga em balanço, é dada por:
fi = β2i
2π
√EI
ρAL4 , i = 1, . . . , n (3.8)
onde o índice i corresponde ao número da frequência natural e os valores de βi sãomostrados na Tabela 3.1.
Tabela 3.1: Valores de β [13].
Frequência natural Valor de βPrimeira 1,87510407Segunda 4,69409113
3.2.3 Resultados das simulações com diferentes tipos deelementos
Na solução computacional feita com o Ansys Workbench foram consideradossete elementos: três elementos sólidos (Solid185 hexaédrico de primeira ordem commalha Hex8, Solid186 hexaédrico de segunda ordem com malha Hex20 e Solid187tetraédrico de segunda ordem com malha Tet10) e quatro elementos tipo casca(Shell181 triangular de primeira ordem com malha tri3, Shell181 quadrilátero linearquad4, Shell281 triangular de segunda ordem com malha tri6 e Shell281 quadriláterode segunda ordem com malha quad8).
As condições de contorno são: restrição de movimento no engaste (x = 0), naanálise estrutural estática e na modal, e as condições de forçamento na análise
40

estrutural estática: força uniformemente distribuída em x = L, em uma linha paraum elemento casca, e em uma superfície para um elemento sólido.
A seguir são mostrados, como exemplo, resultados da análise estrutural estáticacom o elemento Solid187 e o Shell281.
Elemento sólido Solid187 (Tet10)
As tensões máximas de flexão de tração e compressão foram 2, 7568 MPa e 2, 7573MPa, respectivamente, e máxima tensão equivalente foi 2, 2987 MPa. Os resultadossão mostrados nas Figuras 3.14 e 3.15.
Figura 3.14: Tensões de flexão da viga modelada com o elemento Solid187.
41

Figura 3.15: Tensões equivalente da viga modelada com o elemento Solid187.
Elemento sólido Shell281 (quad8)
As tensões máximas de flexão de tração e compressão foram 2, 3608 MPa e 2, 3608MPa, respectivamente, e a máxima tensão equivalente foi 2, 3673 MPa. Os resultadossão mostrados nas Figuras 3.16 e 3.17.
Figura 3.16: Tensões de flexão da viga modelada com o Shell281 (quad8).
42

Figura 3.17: Tensões equivalente da viga modelada com o elemento Shell281 (quad8).
Comparação dos resultados das simulações
Nas tabelas 3.2 e 3.3 é feita uma comparação entre o valor encontrado na análisedo Ansys para a tensão de tração e tensão equivalente, respectivamente, e o valorobtido na solução analítica, assim como o erro associado.
Tabela 3.2: Comparação dos resultados (Tensão de flexão de tração)
Elemento MalhaTensão máxima de flexão σt(MPa)
x = L/2Analítica Ansys Erro, %
Solid185 Hex8 1,0001 0,9999 -0,02Solid186 Hex20 1,0001 1,0002 0,01Solid187 Tet10 1,0001 0,9733 -2,68Shell181 Tri3 1,0001 0,9002 -9,99Shell181 Quad4 1,0001 0,9748 -2,53Shell281 Tri6 1,0001 0,9747 -2,54Shell281 Quad8 1,0001 0,9748 -2,53
43

Tabela 3.3: Comparação dos resultados (Tensão Equivalente -Von Mises)
Elemento MalhaTensão equivalente (MPa)
x = L/2Analítica Ansys Erro, %
Solid185 Hex8 1,01034 1,0017 -0,85Solid186 Hex20 1,01034 1,0068 -0,35Solid187 Tet10 1,01034 1,0078 -0,25Shell181 Tri3 1,01034 0,91321 -9,61Shell181 Quad4 1,01034 0,97558 -3,44Shell281 Tri6 1,01034 0,97606 -3,39Shell281 Quad8 1,01034 0,97511 -3,49
Na tabela 3.4, é feita uma comparação entre o valor encontrado na análise doAnsys para a primeira e segunda frequência natural e o valor obtido na soluçãoanalítica, assim como o erro associado.
Tabela 3.4: Comparação dos resultados (Frequências naturais)
Elemento MalhaFrequência natural da viga (Hz)
Primeira frequência Segunda frequênciaAnalítica Ansys Erro, % Analítica Ansys Erro, %
Solid185 Hex8 5,2184 5,2255 0,1358 32,7035 32,838 0,4112Solid186 Hex20 5,2184 0 -100 32,7035 0 -100Solid187 Tet10 5,2184 5,2288 0,1990 32,7035 32,805 0,3103Shell181 Tri3 5,2184 5,2287 0,1971 32,7035 32,86 0,4785Shell181 Quad4 5,2184 5,2242 0,1109 32,7035 32,827 0,3776Shell281 Tri6 5,2184 5,2205 0,0400 32,7035 32,707 0,0107Shell281 Quad8 5,2184 5,2203 0,0361 32,7035 32,705 0,0046
3.2.4 Discussão dos resultados das simulações
Analisando os resultados obtidos no Ansys para tensão de flexão de traçãoverifica-se que com a exceção do elemento Shell 181 (Tri3), os demais elementosapresentaram bons resultados, sendo que o Solid 185 e o Solid 186 apresentaram osmelhores resultados.
Nas comparações feitas para tensão equivalente de Von Mises, novamente oelemento Shell (Tri3) foi o que apresentou o pior resultado. Neste caso, os elementosdo tipo Solid apresentaram melhores resultados. As análises feitas com as frequências
44
naturais mostraram que o elemento Solid 186 (Hex 20) não é indicado, sendo que oShell 281 (Tri 6) e o Shell 281 (Quad 8) apresentaram excelentes resultados.
A construção da geometria utilizando o elemento Shell é mais complexa e paraimpor condições de uma espessura da estrutura ser igual a outra criando relaçãoentre os parâmetros,por exemplo, não é possível. Analisando as comparações feitaspara os diferentes tipos de análise, conclui-se que o elemento Solid 187 é satisfatóriopara as análises de tensão equivalente e frequência natural, que são as restriçãousadas na otimização.
45

Capítulo 4
Otimização estrutural com AnsysWorkbench
A otimização é composta por uma função custo que será minimizada, variáveisde projeto e as restrições. Esses dados são extraídos de análises estáticas e modaisfeitas no Ansys Workbench. A otimização foi feita em duas etapas: na primeiraforam obtidos os valores das espessuras de chapas padrões existentes no mercado,ou seja, a partir de uma otimização contínua foram selecionados os valores discretosdisponíveis e na segunda foram fixados os valores das espessuras das chapas e asdemais váriáveis constituíram uma otimização contínua.
Optou-se por gerar a geometria da estrutura a ser otimizada em um softwarediferente do Ansys, devido a este fato, o primeiro passo dado foi a construção dageometria no SolidWorks, sendo que esta foi gerada como uma única peça comomostrado na Figura 4.1 e o desenho completo da configuração inicial da estruturase encontra no Apêndice A .
Figura 4.1: Vista isométrica da estrutura
46

O processo de otimização exige parâmetros de entrada, as varáveis de projeto,que são algumas cotas da estrutura e serão apresentadas mais adiante. Aindano ambiente do SolidWorks, na frente do nome de cada cota que servirá comoparâmetro, deve-se colocar "DS_"(Figura4.2) para que possa ser parametrizada noAnsys.
Figura 4.2: Parametrização
A parametrização é interpretada pelo Ansys quando é feita uma interface entreeste e o SolidWorks(Figura4.3).
Figura 4.3: Interface do SolidWorks com o Ansys
A partir daí, a geometria é gerada automaticamente no Ansys (Figura4.4a) sendonecessária carregá-la e marcar "P"na frente do valor das cotas para acioná-las comoparâmetros (Figura4.4b).
47
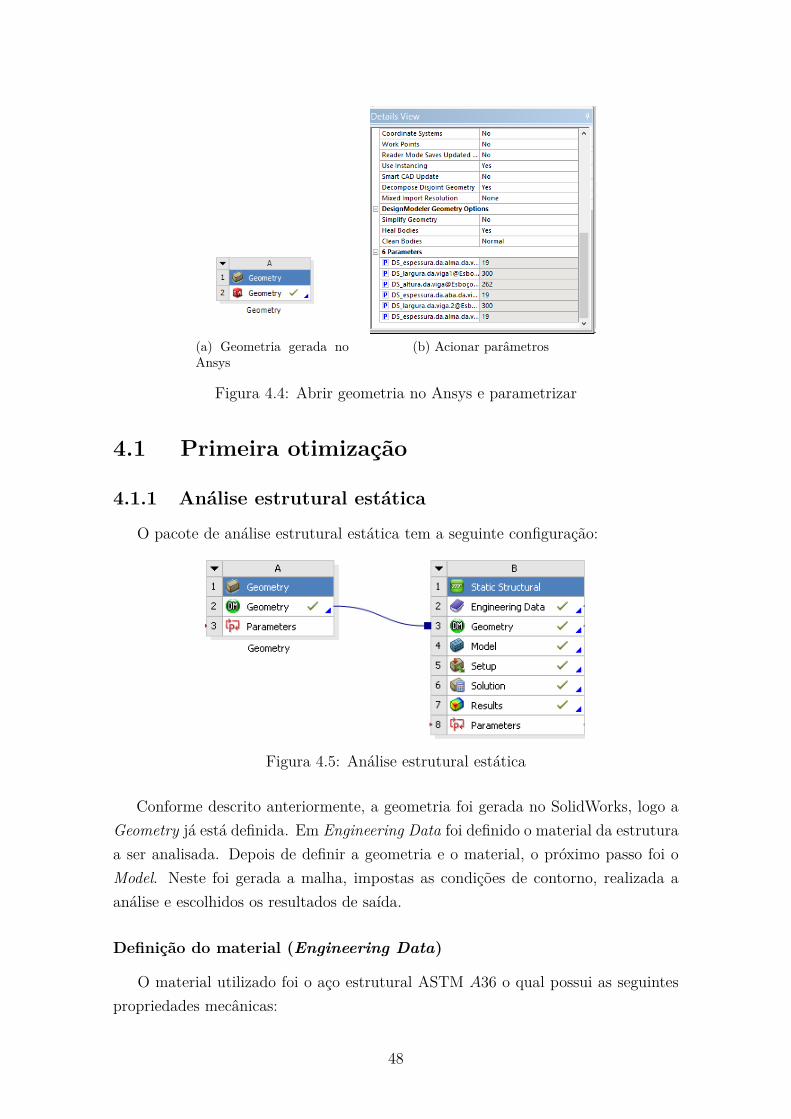
(a) Geometria gerada noAnsys
(b) Acionar parâmetros
Figura 4.4: Abrir geometria no Ansys e parametrizar
4.1 Primeira otimização
4.1.1 Análise estrutural estática
O pacote de análise estrutural estática tem a seguinte configuração:
Figura 4.5: Análise estrutural estática
Conforme descrito anteriormente, a geometria foi gerada no SolidWorks, logo aGeometry já está definida. Em Engineering Data foi definido o material da estruturaa ser analisada. Depois de definir a geometria e o material, o próximo passo foi oModel. Neste foi gerada a malha, impostas as condições de contorno, realizada aanálise e escolhidos os resultados de saída.
Definição do material (Engineering Data)
O material utilizado foi o aço estrutural ASTM A36 o qual possui as seguintespropriedades mecânicas:
48

Tabela 4.1: Propriedades mecânicas do aço estrutural ASTM A36.
Propriedade Valor UnidadeDensidade 7850 Kg/m3
Coeficiente de Poisson 0,3 –Módulo de elasticidade 200 GPaMódulo de cisalhamento 77 GPaResistência à tração 250 MPaResistência ultima 460 MPa
A partir da definição do material, foi possível determinar a massa da geometriaque foi parametrizada e usada como função objetivo.
Modelo (Model)
No modelo foi gerada a malha, impostos os carregamentos e gerada a solução daanálise.
Figura 4.6: Modelo estrutural estático.
Ponto Remoto (Remote Point)
Ao abrir o Modelo (Model), foi definido o Ponto Remoto (Remote Point). Esteponto foi colocado no centro de gravidade do conjunto mecânico e nele foramaplicados os carregamentos. Quando este foi criado, foi necessário definir em quaisáreas seriam aplicados esses esforços, ou seja, as superfícies dos quatro suportesda estrutura representadas na Figura 4.7. A distribuição dos carregamentos nestessuportes foi feita a partir dele.
49

Figura 4.7: Ponto remoto.
Malha(Mesh)
A malha, como foi discutido no Capítulo 3, utiliza elemento Solid187 tetraédrico,que é um elemento de segunda ordem. O tamanho do elemento escolhido, após aanálise de convergência (Figura 4.8), foi 90mm.
Figura 4.8: Análise de convergência da malha da análise estrutural.
A malha resultante é constituída de 55611 nós e 27648 elementos.
50
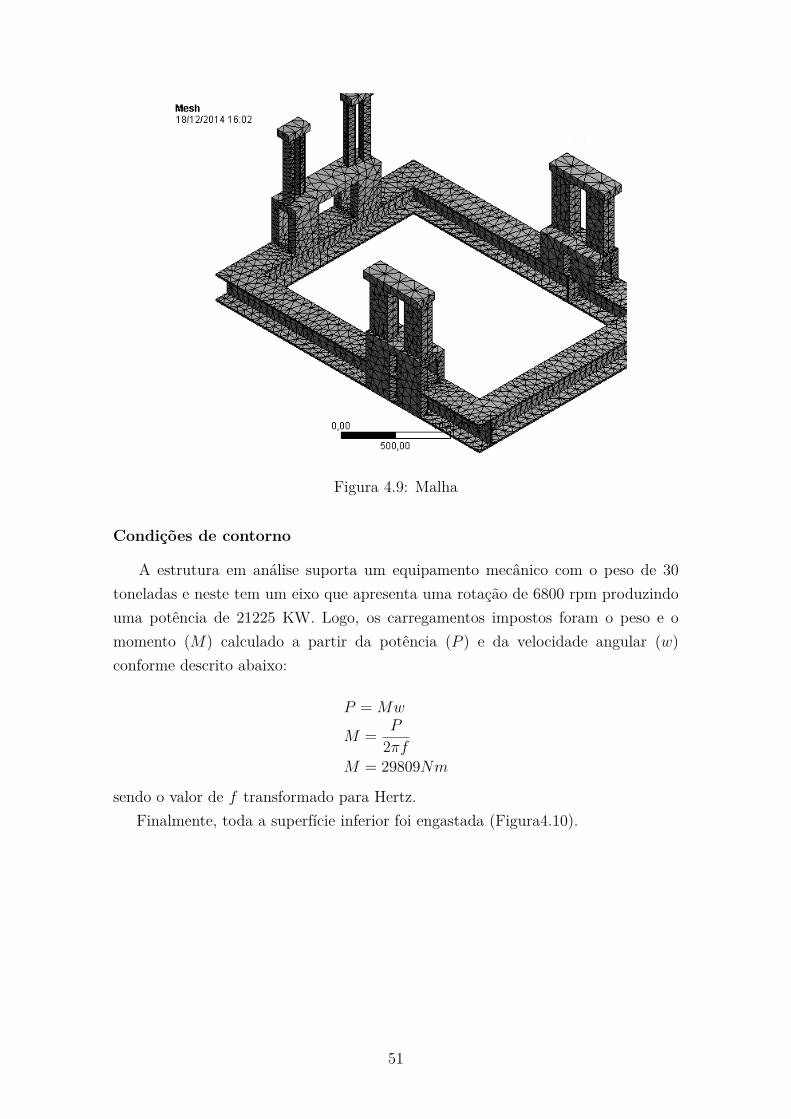
Figura 4.9: Malha
Condições de contorno
A estrutura em análise suporta um equipamento mecânico com o peso de 30toneladas e neste tem um eixo que apresenta uma rotação de 6800 rpm produzindouma potência de 21225 KW. Logo, os carregamentos impostos foram o peso e omomento (M) calculado a partir da potência (P ) e da velocidade angular (w)conforme descrito abaixo:
P = Mw
M = P
2πfM = 29809Nm
sendo o valor de f transformado para Hertz.Finalmente, toda a superfície inferior foi engastada (Figura4.10).
51
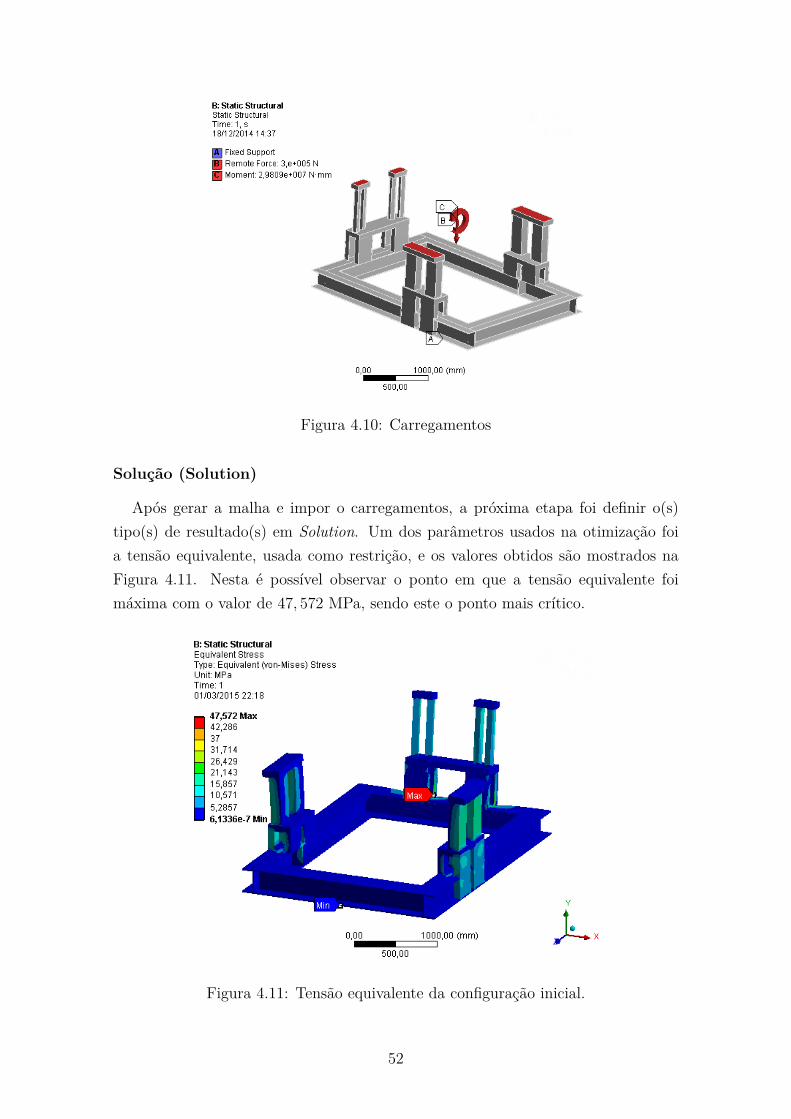
Figura 4.10: Carregamentos
Solução (Solution)
Após gerar a malha e impor o carregamentos, a próxima etapa foi definir o(s)tipo(s) de resultado(s) em Solution. Um dos parâmetros usados na otimização foia tensão equivalente, usada como restrição, e os valores obtidos são mostrados naFigura 4.11. Nesta é possível observar o ponto em que a tensão equivalente foimáxima com o valor de 47, 572 MPa, sendo este o ponto mais crítico.
Figura 4.11: Tensão equivalente da configuração inicial.
52

4.1.2 Análise Modal
O pacote de análise modal foi similar ao de análise estática estrutural e tem aseguinte configuração:
Figura 4.12: Análise Modal
A geometria (Geometry) e os dados do material (Engineering Data) foramanexados da análise estrutural estática. O modelo(Model) e a solução(Solution)diferem da análise estática, sendo estes discutidos a seguir.
Modelo (Model)
Conforme já citado anteriormente, no modelo foi gerada a malha, impostos oscarregamentos e gerada a solução da análise.
Figura 4.13: Modelo análise modal.
Ponto de massa (Point Mass)
Como fazer a análise de todo o conjunto mecânico teria um custo computacionalmuito elevado, foi definido o Ponto de massa (Point Mass). Este ponto foi colocado
53
no centro de gravidade do conjunto e foi definido como tendo a massa do conjuntomecânico. Quando este foi criado, foi necessário definir em quais áreas seriamaplicados esses carregamentos assim como no ponto remoto ( Figura 4.14).
Figura 4.14: Ponto de massa.
Malha (Mesh)
A malha da análise modal também utiliza o elemento Solid187 tetraédrico, queé um elemento de segunda ordem. O tamanho do elemento escolhido, após a análisede convergência (Figura 4.15), foi 90mm.
Figura 4.15: Análise de convergência da malha da análise modal.
A malha resultante apresenta a mesma configuração da malha da análiseestrutural.
54

Condições de contorno
A estrutura foi engastada na sua parte inferior e foi selecionada a opção decálculo dos 15 primeiros modos de frequências naturais da estrutura. Como oeixo tem a rotação de 6800 rpm (113,33 Hz), foram feitas análises das frequênciasnaturais da estrutura para que estas não atingissem esse valor evitando o fenômenode ressonância.
Solução (Solution)
Os resultados obtidos em Solution foram os valores dos 15 modos de frequênciasnaturais. Estes mostraram que o nono e décimo modos constituem a faixa de valorescríticos como pode ser visto na tabela a seguir:
Tabela 4.2: Modos de frequência da configuração inicial.
Modo Frequência (Hz)1 3,85522 6,26123 47,7984 49,1525 52,8086 62,8017 73,8768 84,3339 99,45610 138,6911 168,7512 188,4613 194,1814 204,6915 209,99
55

4.1.3 Definindo as variáveis de projeto
Sabe-se que um projeto ótimo depende de encontrar os melhores valores paraas variáveis de projeto e no Ansys é recomendado que se tenha no máximo de 10a 15 variáveis, pois números maiores o leva a trabalhar com as variáveis de maiorrelevância. Quanto maior o número de váriaveis, maior o tempo computacionaldemandado.
Diante disso, foi feito um estudo para saber quais as peças da estrutura pesavammais, para assim, definir os parâmetros. O resultado é apresentado na tabela a seguire o desenho da estrutura com a numeração das peças está disponível no ApêndiceA.
Tabela 4.3: Comparação do peso das peças que compõem a estrutura
N da Peça Peso unidade [Kg] Quantidade Peso total [Kg] % peso da estrutura1 435.200 2 870.400 36.832 260.400 2 520.800 22.033 7.919 4 31.677 1.344 7.557 8 60.453 2.565 125.620 2 251.240 10.636 11.842 8 94.736 4.017 98.888 2 197.776 8.378 12.514 4 50.056 2.129 197.400 1 197.400 8.3510 3.652 8 29.212 1.2411 24.417 2 48.834 2.0112 5.490 2 10.981 0.46
Massa total [Kg] 2363.565
A análise revela que as peças que mais contribuem no peso da estrutura são a 1e a 2. Estas são perfis H em que a espessura da alma tem 19 mm, a largura da abaé de 300 mm, a espessura da aba é de 19 mm e a altura da alma é de 262 mm. Ascotas da peça 1 que foram parametrizadas estão representadas na Figura 4.16.
Figura 4.16: Parâmetros Peça 1.
Já as cotas da peça 2, que foram parametrizadas, estão representadas na Figura4.17. A espessura da aba e a altura da alma das peças devem ser iguais, este fato
56
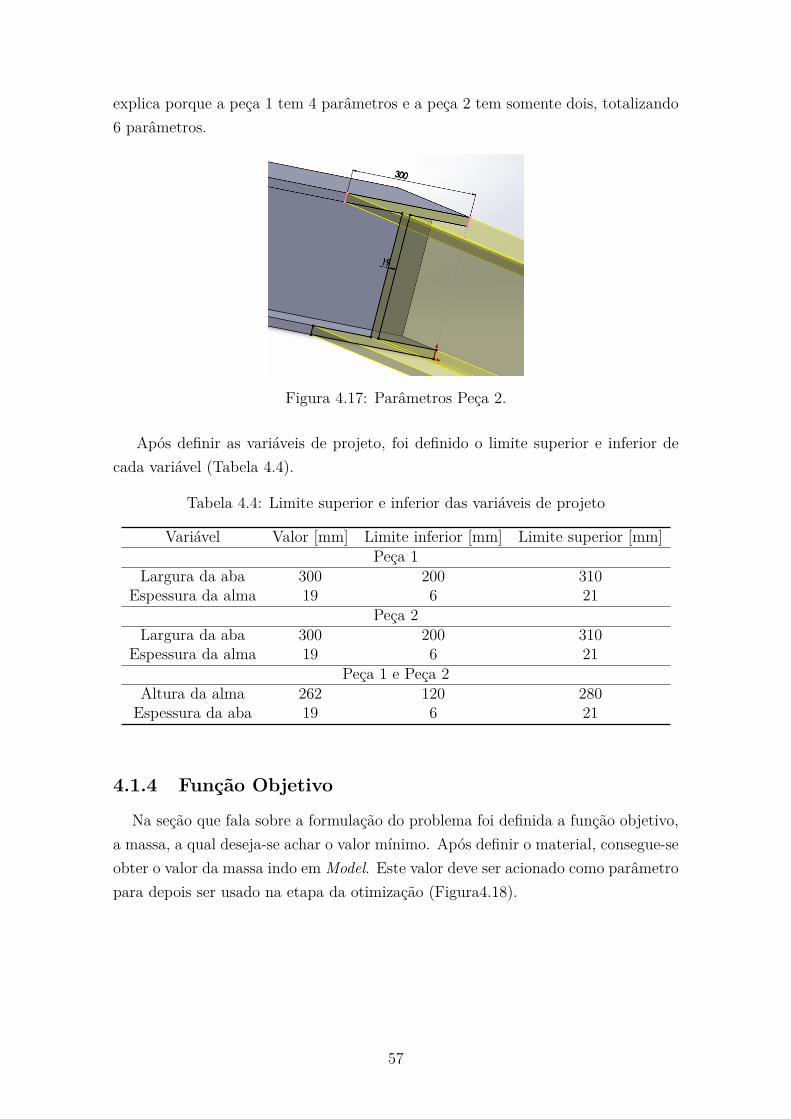
explica porque a peça 1 tem 4 parâmetros e a peça 2 tem somente dois, totalizando6 parâmetros.
Figura 4.17: Parâmetros Peça 2.
Após definir as variáveis de projeto, foi definido o limite superior e inferior decada variável (Tabela 4.4).
Tabela 4.4: Limite superior e inferior das variáveis de projeto
Variável Valor [mm] Limite inferior [mm] Limite superior [mm]Peça 1
Largura da aba 300 200 310Espessura da alma 19 6 21
Peça 2Largura da aba 300 200 310
Espessura da alma 19 6 21Peça 1 e Peça 2
Altura da alma 262 120 280Espessura da aba 19 6 21
4.1.4 Função Objetivo
Na seção que fala sobre a formulação do problema foi definida a função objetivo,a massa, a qual deseja-se achar o valor mínimo. Após definir o material, consegue-seobter o valor da massa indo em Model. Este valor deve ser acionado como parâmetropara depois ser usado na etapa da otimização (Figura4.18).
57
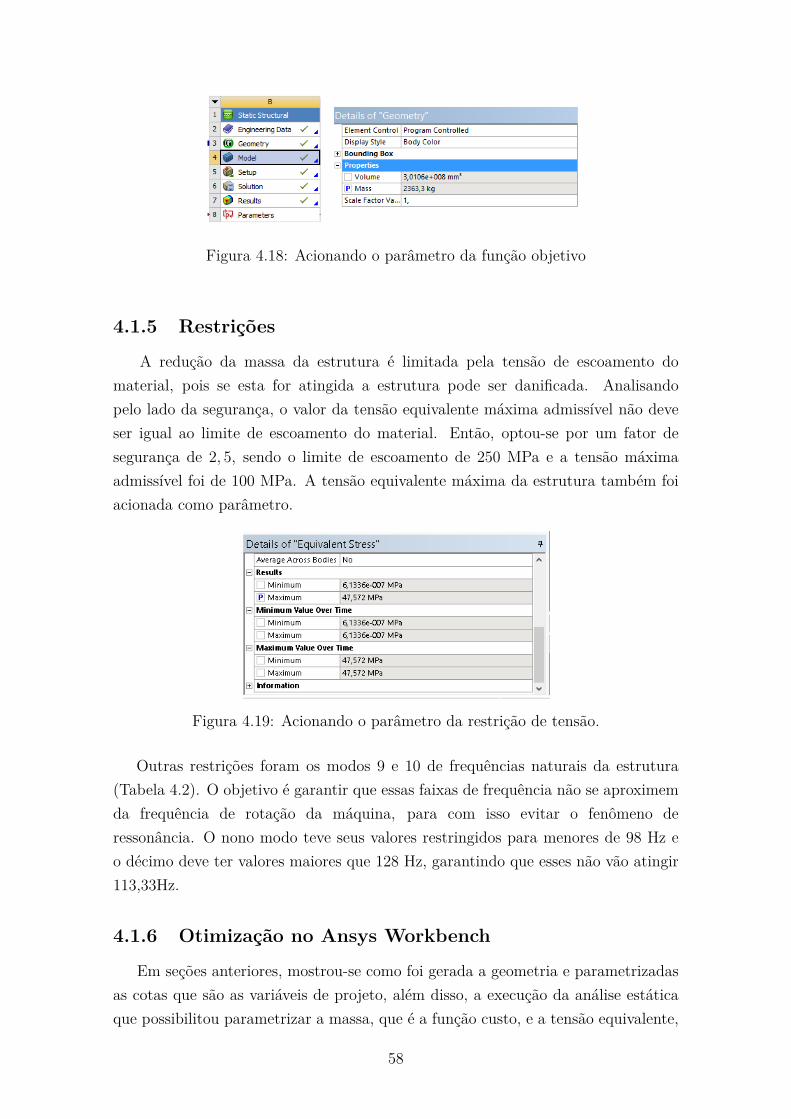
Figura 4.18: Acionando o parâmetro da função objetivo
4.1.5 Restrições
A redução da massa da estrutura é limitada pela tensão de escoamento domaterial, pois se esta for atingida a estrutura pode ser danificada. Analisandopelo lado da segurança, o valor da tensão equivalente máxima admissível não deveser igual ao limite de escoamento do material. Então, optou-se por um fator desegurança de 2, 5, sendo o limite de escoamento de 250 MPa e a tensão máximaadmissível foi de 100 MPa. A tensão equivalente máxima da estrutura também foiacionada como parâmetro.
Figura 4.19: Acionando o parâmetro da restrição de tensão.
Outras restrições foram os modos 9 e 10 de frequências naturais da estrutura(Tabela 4.2). O objetivo é garantir que essas faixas de frequência não se aproximemda frequência de rotação da máquina, para com isso evitar o fenômeno deressonância. O nono modo teve seus valores restringidos para menores de 98 Hz eo décimo deve ter valores maiores que 128 Hz, garantindo que esses não vão atingir113,33Hz.
4.1.6 Otimização no Ansys Workbench
Em seções anteriores, mostrou-se como foi gerada a geometria e parametrizadasas cotas que são as variáveis de projeto, além disso, a execução da análise estáticaque possibilitou parametrizar a massa, que é a função custo, e a tensão equivalente,
58
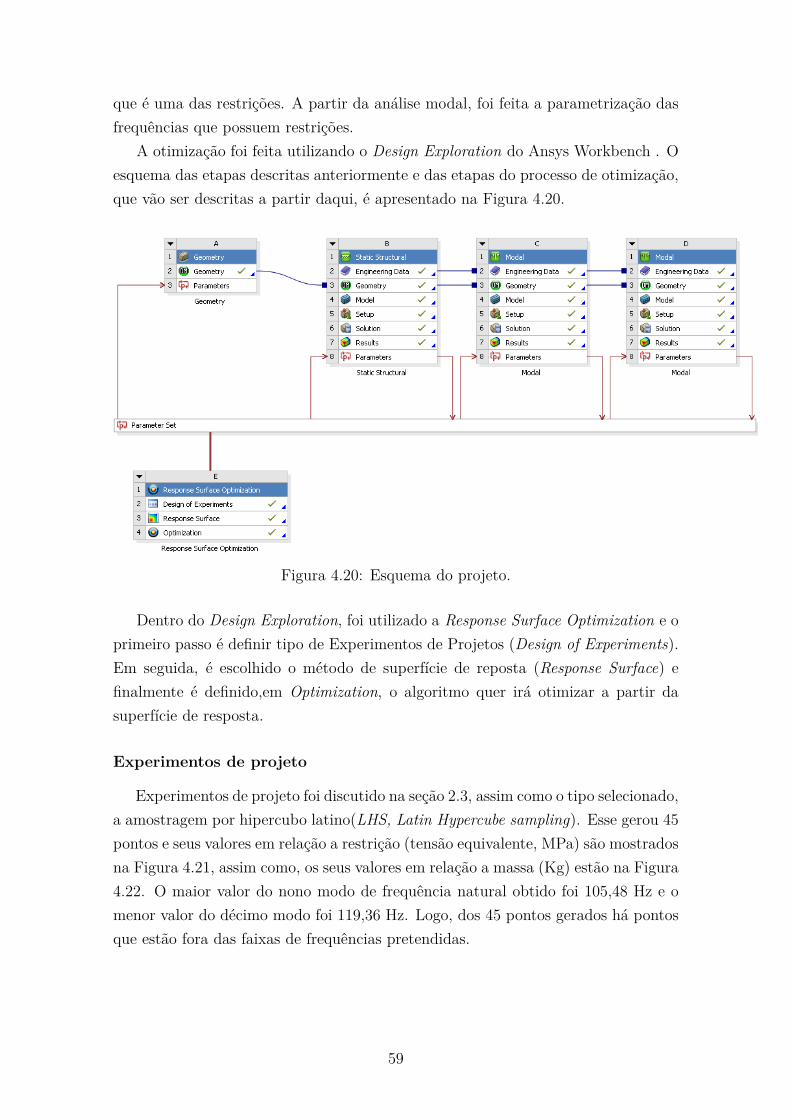
que é uma das restrições. A partir da análise modal, foi feita a parametrização dasfrequências que possuem restrições.
A otimização foi feita utilizando o Design Exploration do Ansys Workbench . Oesquema das etapas descritas anteriormente e das etapas do processo de otimização,que vão ser descritas a partir daqui, é apresentado na Figura 4.20.
Figura 4.20: Esquema do projeto.
Dentro do Design Exploration, foi utilizado a Response Surface Optimization e oprimeiro passo é definir tipo de Experimentos de Projetos (Design of Experiments).Em seguida, é escolhido o método de superfície de reposta (Response Surface) efinalmente é definido,em Optimization, o algoritmo quer irá otimizar a partir dasuperfície de resposta.
Experimentos de projeto
Experimentos de projeto foi discutido na seção 2.3, assim como o tipo selecionado,a amostragem por hipercubo latino(LHS, Latin Hypercube sampling). Esse gerou 45pontos e seus valores em relação a restrição (tensão equivalente, MPa) são mostradosna Figura 4.21, assim como, os seus valores em relação a massa (Kg) estão na Figura4.22. O maior valor do nono modo de frequência natural obtido foi 105,48 Hz e omenor valor do décimo modo foi 119,36 Hz. Logo, dos 45 pontos gerados há pontosque estão fora das faixas de frequências pretendidas.
59
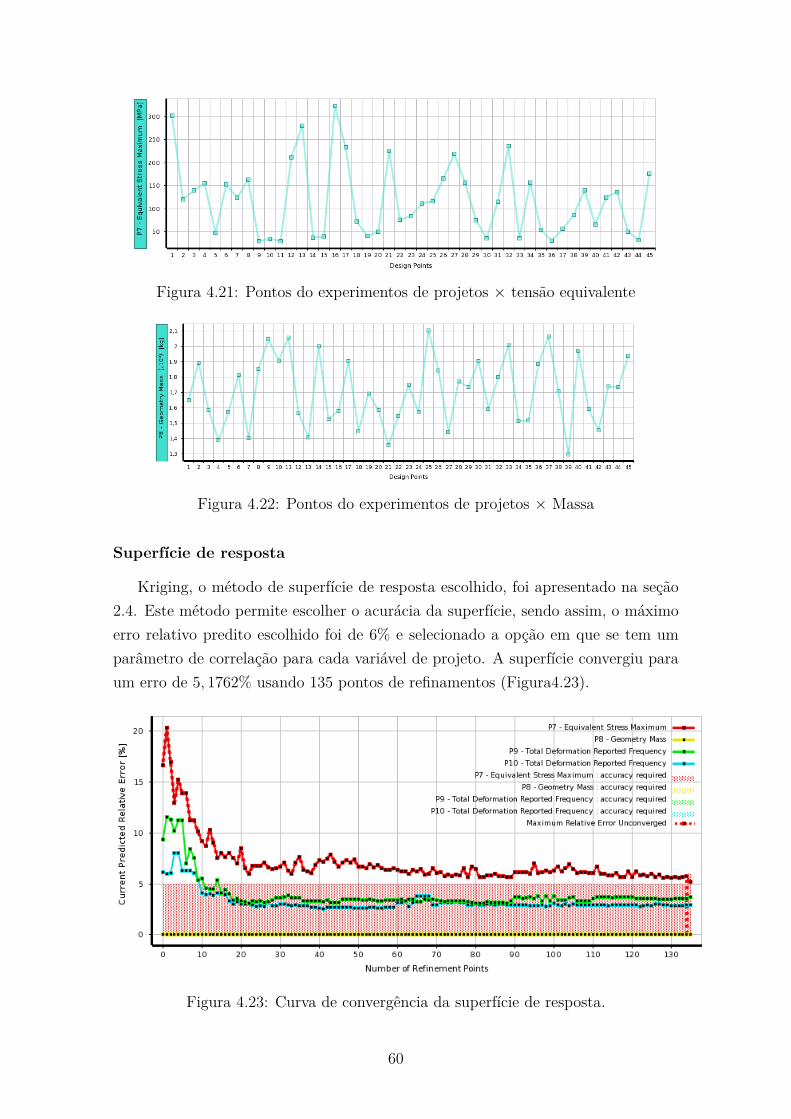
Figura 4.21: Pontos do experimentos de projetos × tensão equivalente
Figura 4.22: Pontos do experimentos de projetos × Massa
Superfície de resposta
Kriging, o método de superfície de resposta escolhido, foi apresentado na seção2.4. Este método permite escolher o acurácia da superfície, sendo assim, o máximoerro relativo predito escolhido foi de 6% e selecionado a opção em que se tem umparâmetro de correlação para cada variável de projeto. A superfície convergiu paraum erro de 5, 1762% usando 135 pontos de refinamentos (Figura4.23).
Figura 4.23: Curva de convergência da superfície de resposta.
60

O Ansys fornece a análise de sensibilidade local de cada parâmetro. Um dosmétodo que ele usa para calcular a sensibilidade é o seguinte:
1. Plota uma curva de resposta de um parâmetro y em função de um parâmetrox, ou seja, y = f(x).
2. Calcula (Max(y)−Min(y))/Média(y)
3. Se y cresce enquanto x cresce, o sinal é positivo; caso contrário é negativo.
A sensibilidade dos parâmetros em relação a tensão equivalente, o nono e décimomodo de frequência e a massa é apresentada na Figura 4.24 e o parâmetro queapresenta maior sensibilidade na massa é a espessura da aba:
Figura 4.24: Sensibilidade das variáveis de projeto.
A superfície de resposta da tensão equivalente (MPa) em função da espessura daaba (mm) e da altura (mm) é a seguinte:
61

Figura 4.25: Superfície de resposta para Tensão Equivalente (MPa)
A superfície de resposta da massa (Kg) em função dem função da espessura daaba (mm) e da altura (mm) é a seguinte:
Figura 4.26: Superfície de resposta para Massa(Kg)
Método de otimização
O método de otimização escolhido foi o NLPQL (seção2.5.8), Programação não-linear por Lagrangeano quadrático, que quando as derivadas analíticas não estãodisponíveis as aproximam e para essa aproximação foi selecionado a diferença central.O método de diferença central é usado para calcular as derivadas de saída e esteaumenta a precisão dos cálculos de gradiente, mas duplica o número de avaliaçõesdos pontos de projeto.
A função objetivo e a restrição foram selecionadas como mostra a figura abaixo:
62
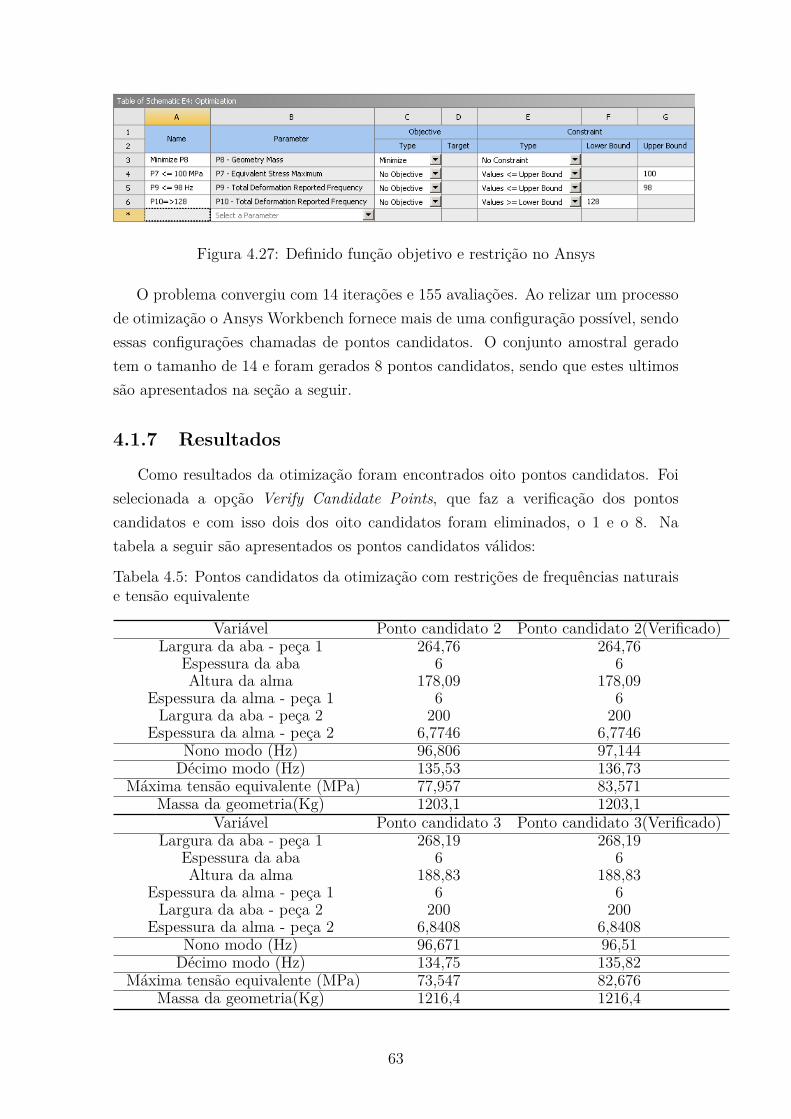
Figura 4.27: Definido função objetivo e restrição no Ansys
O problema convergiu com 14 iterações e 155 avaliações. Ao relizar um processode otimização o Ansys Workbench fornece mais de uma configuração possível, sendoessas configurações chamadas de pontos candidatos. O conjunto amostral geradotem o tamanho de 14 e foram gerados 8 pontos candidatos, sendo que estes ultimossão apresentados na seção a seguir.
4.1.7 Resultados
Como resultados da otimização foram encontrados oito pontos candidatos. Foiselecionada a opção Verify Candidate Points, que faz a verificação dos pontoscandidatos e com isso dois dos oito candidatos foram eliminados, o 1 e o 8. Natabela a seguir são apresentados os pontos candidatos válidos:
Tabela 4.5: Pontos candidatos da otimização com restrições de frequências naturaise tensão equivalente
Variável Ponto candidato 2 Ponto candidato 2(Verificado)Largura da aba - peça 1 264,76 264,76
Espessura da aba 6 6Altura da alma 178,09 178,09
Espessura da alma - peça 1 6 6Largura da aba - peça 2 200 200
Espessura da alma - peça 2 6,7746 6,7746Nono modo (Hz) 96,806 97,144Décimo modo (Hz) 135,53 136,73
Máxima tensão equivalente (MPa) 77,957 83,571Massa da geometria(Kg) 1203,1 1203,1
Variável Ponto candidato 3 Ponto candidato 3(Verificado)Largura da aba - peça 1 268,19 268,19
Espessura da aba 6 6Altura da alma 188,83 188,83
Espessura da alma - peça 1 6 6Largura da aba - peça 2 200 200
Espessura da alma - peça 2 6,8408 6,8408Nono modo (Hz) 96,671 96,51Décimo modo (Hz) 134,75 135,82
Máxima tensão equivalente (MPa) 73,547 82,676Massa da geometria(Kg) 1216,4 1216,4
63
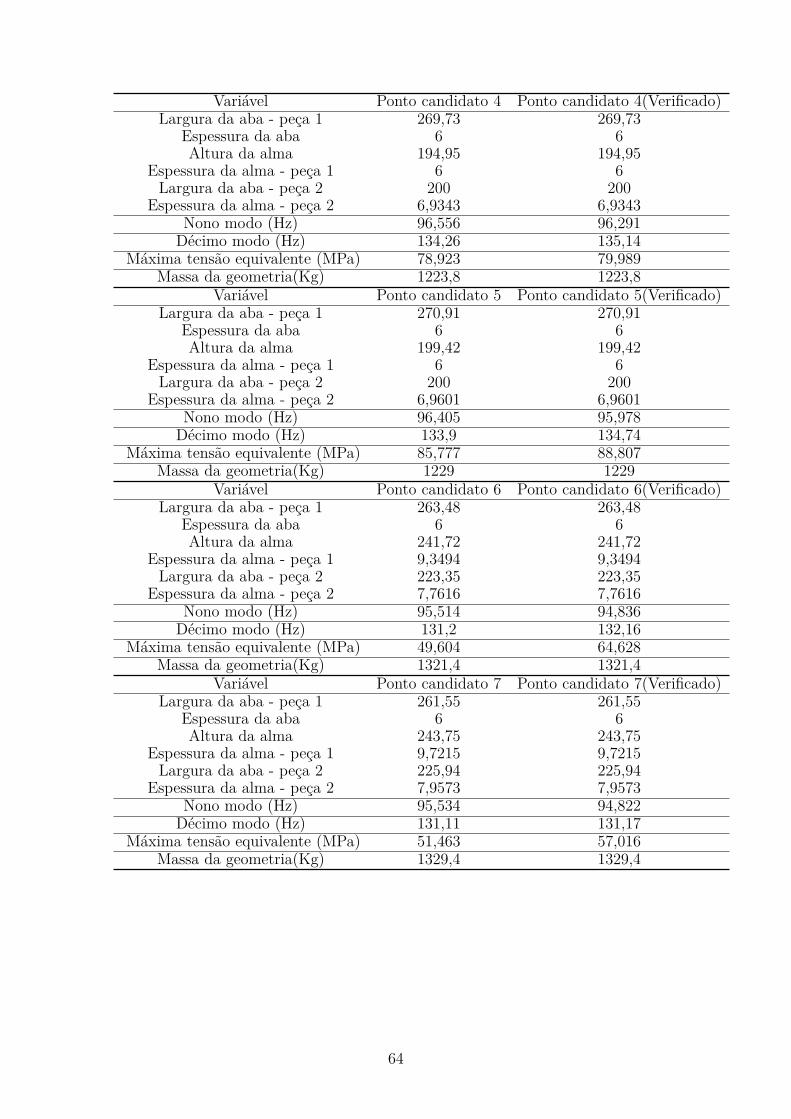
Variável Ponto candidato 4 Ponto candidato 4(Verificado)Largura da aba - peça 1 269,73 269,73
Espessura da aba 6 6Altura da alma 194,95 194,95
Espessura da alma - peça 1 6 6Largura da aba - peça 2 200 200
Espessura da alma - peça 2 6,9343 6,9343Nono modo (Hz) 96,556 96,291Décimo modo (Hz) 134,26 135,14
Máxima tensão equivalente (MPa) 78,923 79,989Massa da geometria(Kg) 1223,8 1223,8
Variável Ponto candidato 5 Ponto candidato 5(Verificado)Largura da aba - peça 1 270,91 270,91
Espessura da aba 6 6Altura da alma 199,42 199,42
Espessura da alma - peça 1 6 6Largura da aba - peça 2 200 200
Espessura da alma - peça 2 6,9601 6,9601Nono modo (Hz) 96,405 95,978Décimo modo (Hz) 133,9 134,74
Máxima tensão equivalente (MPa) 85,777 88,807Massa da geometria(Kg) 1229 1229
Variável Ponto candidato 6 Ponto candidato 6(Verificado)Largura da aba - peça 1 263,48 263,48
Espessura da aba 6 6Altura da alma 241,72 241,72
Espessura da alma - peça 1 9,3494 9,3494Largura da aba - peça 2 223,35 223,35
Espessura da alma - peça 2 7,7616 7,7616Nono modo (Hz) 95,514 94,836Décimo modo (Hz) 131,2 132,16
Máxima tensão equivalente (MPa) 49,604 64,628Massa da geometria(Kg) 1321,4 1321,4
Variável Ponto candidato 7 Ponto candidato 7(Verificado)Largura da aba - peça 1 261,55 261,55
Espessura da aba 6 6Altura da alma 243,75 243,75
Espessura da alma - peça 1 9,7215 9,7215Largura da aba - peça 2 225,94 225,94
Espessura da alma - peça 2 7,9573 7,9573Nono modo (Hz) 95,534 94,822Décimo modo (Hz) 131,11 131,17
Máxima tensão equivalente (MPa) 51,463 57,016Massa da geometria(Kg) 1329,4 1329,4
64
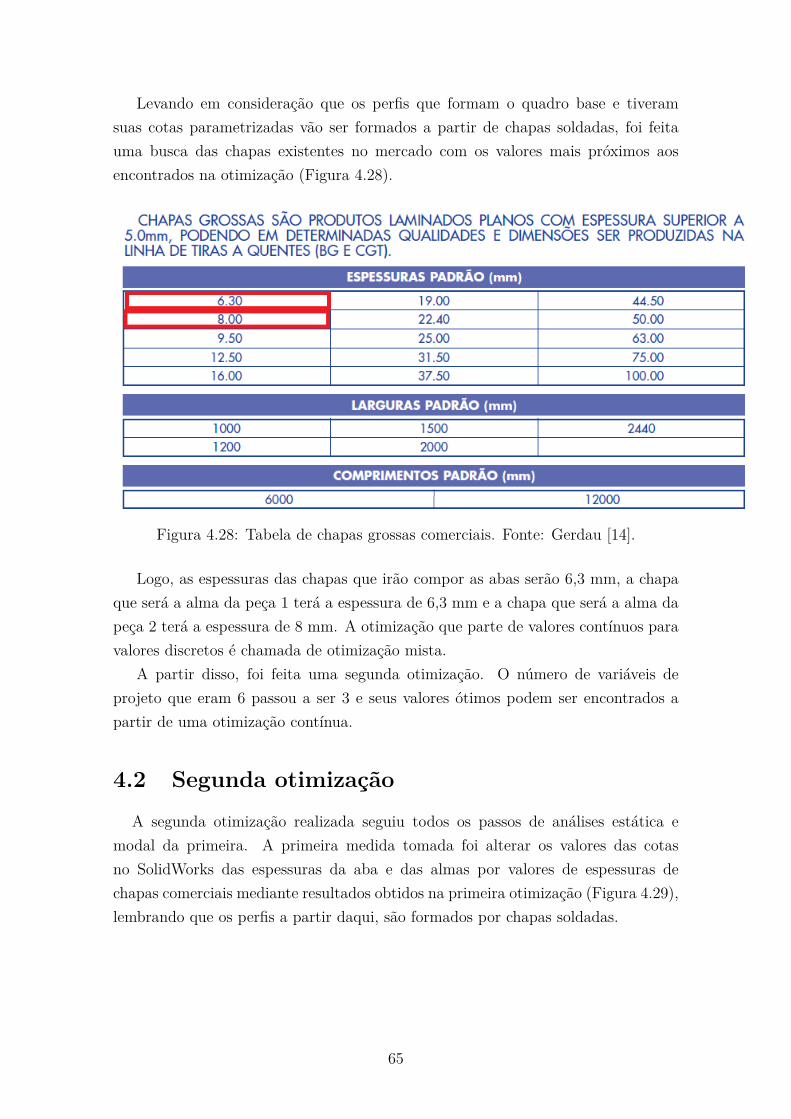
Levando em consideração que os perfis que formam o quadro base e tiveramsuas cotas parametrizadas vão ser formados a partir de chapas soldadas, foi feitauma busca das chapas existentes no mercado com os valores mais próximos aosencontrados na otimização (Figura 4.28).
Figura 4.28: Tabela de chapas grossas comerciais. Fonte: Gerdau [14].
Logo, as espessuras das chapas que irão compor as abas serão 6,3 mm, a chapaque será a alma da peça 1 terá a espessura de 6,3 mm e a chapa que será a alma dapeça 2 terá a espessura de 8 mm. A otimização que parte de valores contínuos paravalores discretos é chamada de otimização mista.
A partir disso, foi feita uma segunda otimização. O número de variáveis deprojeto que eram 6 passou a ser 3 e seus valores ótimos podem ser encontrados apartir de uma otimização contínua.
4.2 Segunda otimização
A segunda otimização realizada seguiu todos os passos de análises estática emodal da primeira. A primeira medida tomada foi alterar os valores das cotasno SolidWorks das espessuras da aba e das almas por valores de espessuras dechapas comerciais mediante resultados obtidos na primeira otimização (Figura 4.29),lembrando que os perfis a partir daqui, são formados por chapas soldadas.
65
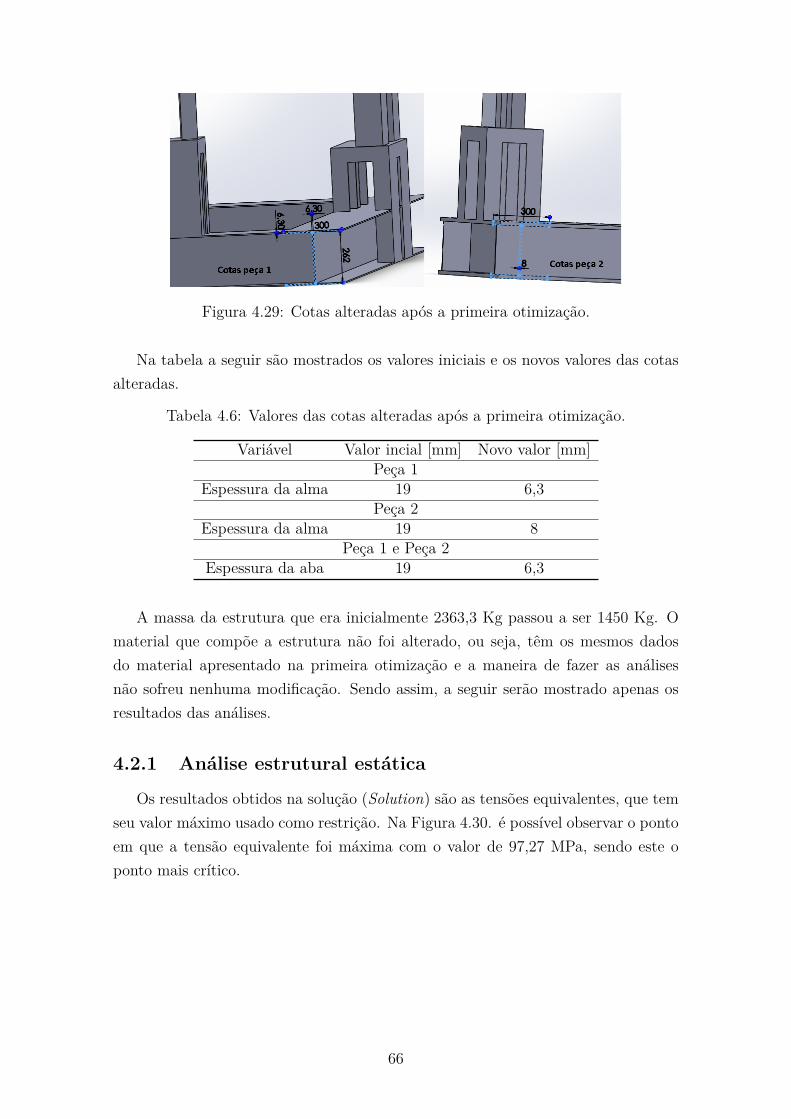
Figura 4.29: Cotas alteradas após a primeira otimização.
Na tabela a seguir são mostrados os valores iniciais e os novos valores das cotasalteradas.
Tabela 4.6: Valores das cotas alteradas após a primeira otimização.
Variável Valor incial [mm] Novo valor [mm]Peça 1
Espessura da alma 19 6,3Peça 2
Espessura da alma 19 8Peça 1 e Peça 2
Espessura da aba 19 6,3
A massa da estrutura que era inicialmente 2363,3 Kg passou a ser 1450 Kg. Omaterial que compõe a estrutura não foi alterado, ou seja, têm os mesmos dadosdo material apresentado na primeira otimização e a maneira de fazer as análisesnão sofreu nenhuma modificação. Sendo assim, a seguir serão mostrado apenas osresultados das análises.
4.2.1 Análise estrutural estática
Os resultados obtidos na solução (Solution) são as tensões equivalentes, que temseu valor máximo usado como restrição. Na Figura 4.30. é possível observar o pontoem que a tensão equivalente foi máxima com o valor de 97,27 MPa, sendo este oponto mais crítico.
66
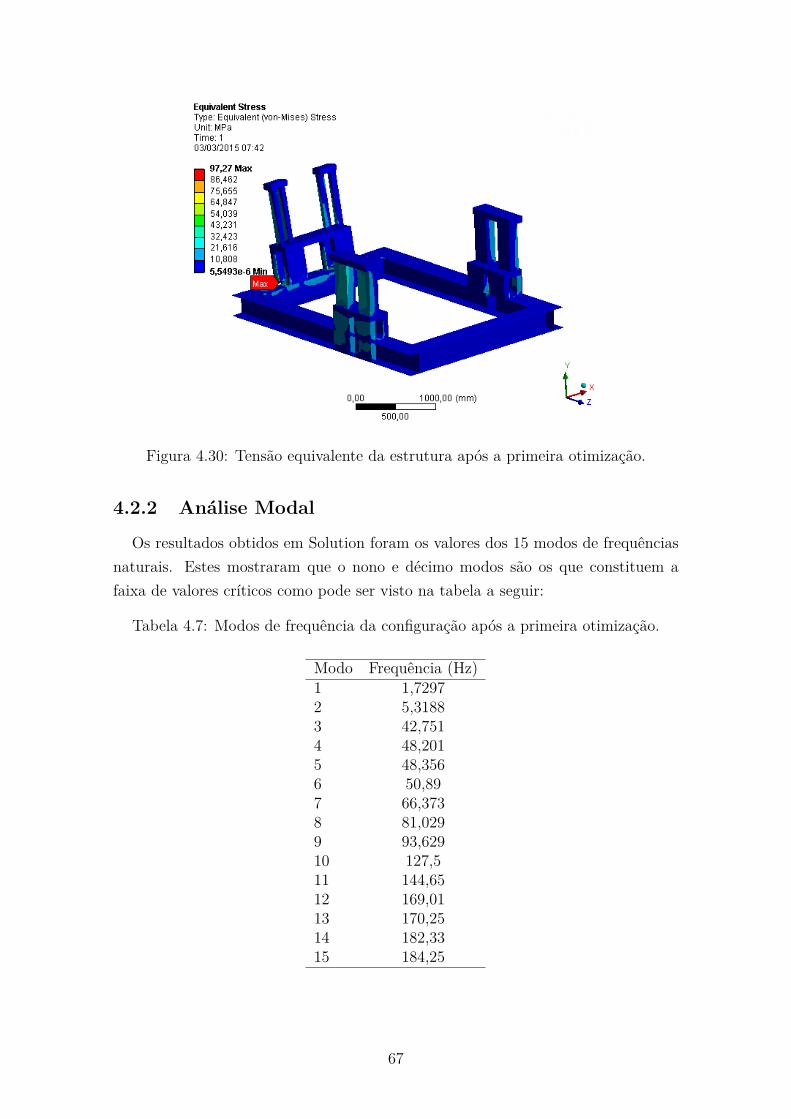
Figura 4.30: Tensão equivalente da estrutura após a primeira otimização.
4.2.2 Análise Modal
Os resultados obtidos em Solution foram os valores dos 15 modos de frequênciasnaturais. Estes mostraram que o nono e décimo modos são os que constituem afaixa de valores críticos como pode ser visto na tabela a seguir:
Tabela 4.7: Modos de frequência da configuração após a primeira otimização.
Modo Frequência (Hz)1 1,72972 5,31883 42,7514 48,2015 48,3566 50,897 66,3738 81,0299 93,62910 127,511 144,6512 169,0113 170,2514 182,3315 184,25
67

4.2.3 Variáveis de projeto
Na nova otimização, o número de variáveis de projeto foi reduzido à metade. Asnovas variáveis estão definidas na tabela abaixo junto com os seus limites superiorese inferiores:
Tabela 4.8: Limite superior e inferior das variáveis de projeto da segunda otimização.
Variável Valor [mm] Limite inferior [mm] Limite superior [mm]Peça 1
Largura da aba 300 200 310Peça 2
Largura da aba 300 200 310Peça 1 e Peça 2
Altura da alma 262 120 280
4.2.4 Função Objetivo
A massa da nova configuração é a função objetivo a qual deseja-se minimizar.Quando comparada a massa da nova configuração com a da inicial, verifica-se quejá houve uma redução de 38,64%.
Figura 4.31: Acionando o parâmetro da função objetivo da nova otimização.
4.2.5 Restrições
Conforme já foi dito, a redução da massa da estrutura é limitada pela tensãode escoamento do material. O fator de segurança permaneceu 2, 5, o limite deescoamento é 250 MPa e a tensão máxima admissível é 100 MPa. A tensãoequivalente máxima da estrutura deve ser acionada como parâmetro.
As outras duas restrições permanceram, os modos 9 e 10 de frequências naturaisda estrutura, com objetivo de garantir que essas faixas de frequência não seaproximem da frequência de rotação da máquina. O nono modo teve seus valoresrestringidos para menores de 98 Hz e o décimo deve ter valores maiores que 128 Hz,garantindo que esses não vão atingir 113,33Hz.
68
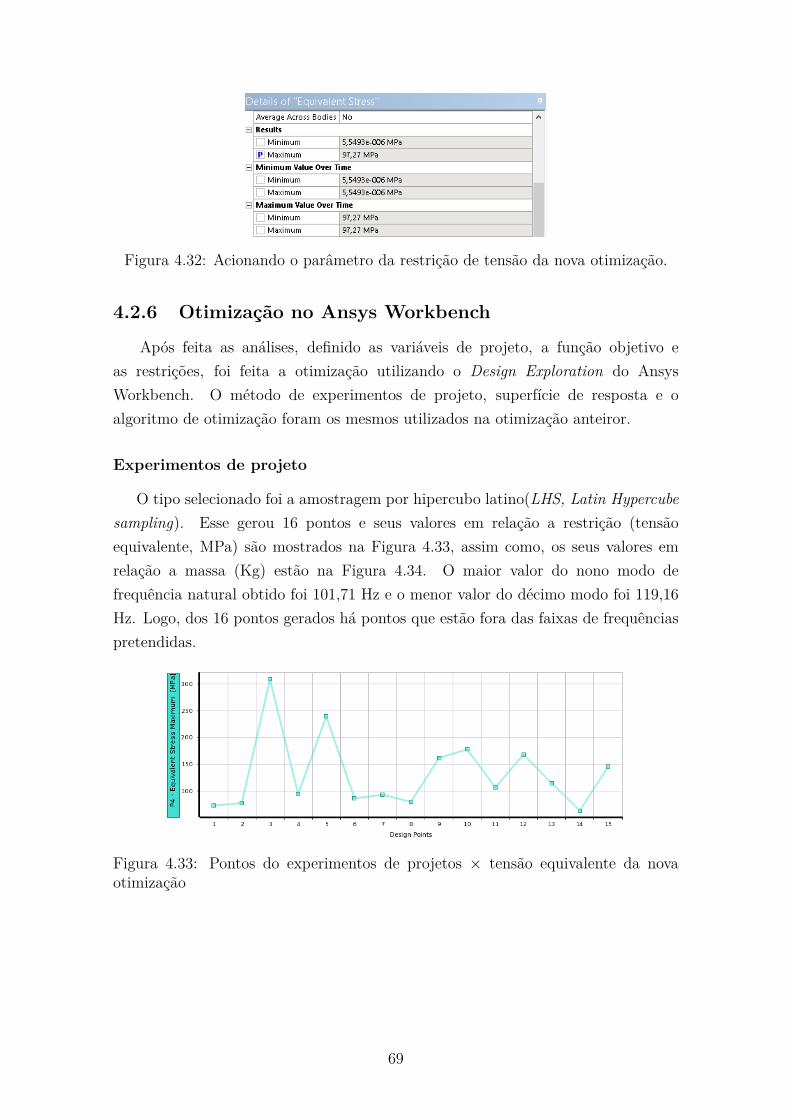
Figura 4.32: Acionando o parâmetro da restrição de tensão da nova otimização.
4.2.6 Otimização no Ansys Workbench
Após feita as análises, definido as variáveis de projeto, a função objetivo eas restrições, foi feita a otimização utilizando o Design Exploration do AnsysWorkbench. O método de experimentos de projeto, superfície de resposta e oalgoritmo de otimização foram os mesmos utilizados na otimização anteiror.
Experimentos de projeto
O tipo selecionado foi a amostragem por hipercubo latino(LHS, Latin Hypercubesampling). Esse gerou 16 pontos e seus valores em relação a restrição (tensãoequivalente, MPa) são mostrados na Figura 4.33, assim como, os seus valores emrelação a massa (Kg) estão na Figura 4.34. O maior valor do nono modo defrequência natural obtido foi 101,71 Hz e o menor valor do décimo modo foi 119,16Hz. Logo, dos 16 pontos gerados há pontos que estão fora das faixas de frequênciaspretendidas.
Figura 4.33: Pontos do experimentos de projetos × tensão equivalente da novaotimização
69
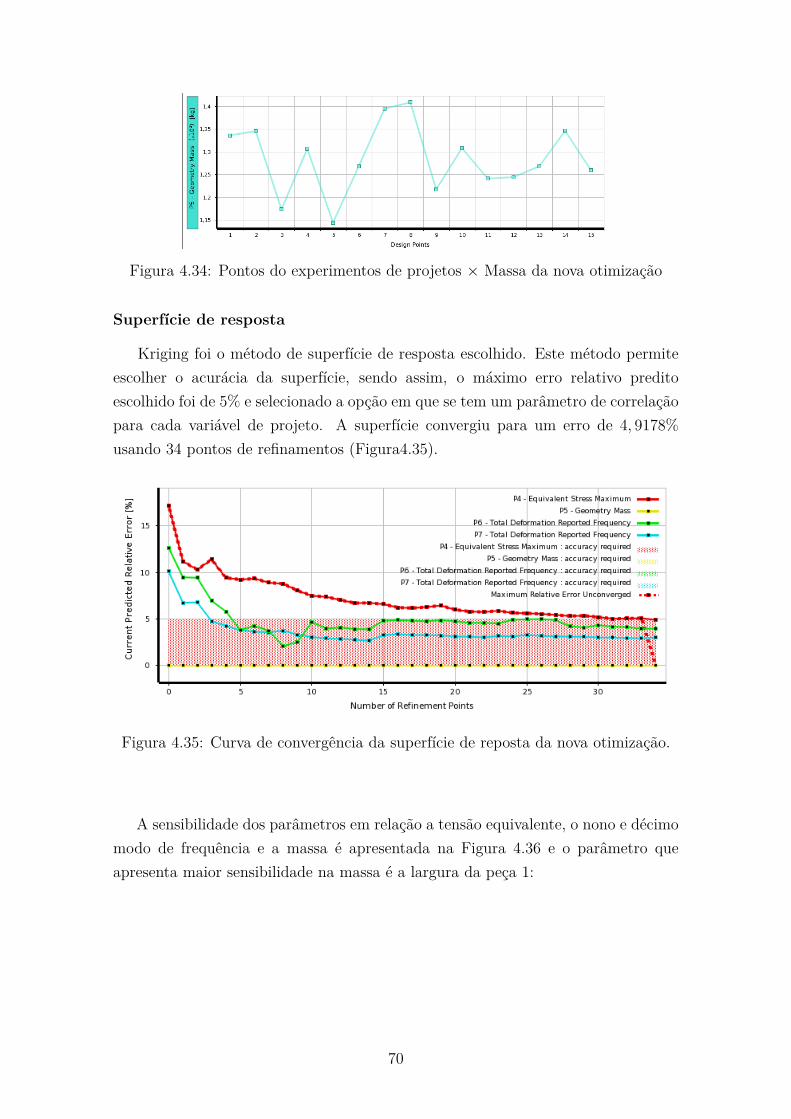
Figura 4.34: Pontos do experimentos de projetos × Massa da nova otimização
Superfície de resposta
Kriging foi o método de superfície de resposta escolhido. Este método permiteescolher o acurácia da superfície, sendo assim, o máximo erro relativo preditoescolhido foi de 5% e selecionado a opção em que se tem um parâmetro de correlaçãopara cada variável de projeto. A superfície convergiu para um erro de 4, 9178%usando 34 pontos de refinamentos (Figura4.35).
Figura 4.35: Curva de convergência da superfície de reposta da nova otimização.
A sensibilidade dos parâmetros em relação a tensão equivalente, o nono e décimomodo de frequência e a massa é apresentada na Figura 4.36 e o parâmetro queapresenta maior sensibilidade na massa é a largura da peça 1:
70

Figura 4.36: Sensibilidade das variáveis de projeto da nova otimização.
A superfície de resposta da tensão equivalente (MPa) em função da largura dapeça 1 (mm) e da altura (mm) é a seguinte:
Figura 4.37: Superfície de resposta para Tensão Equivalente (MPa) da novaotimização.
A superfície de resposta da massa (Kg) em função da largura da peça 1 (mm) eda altura (mm) é a seguinte:
71

Figura 4.38: Superfície de resposta para Massa(Kg) da nova otimização.
Método de otimização
O método de otimização escolhido foi o NLPQL (seção2.5.8), Programaçãonão-linear por Lagrangeano quadrático. A função objetivo e a restrição foramselecionadas da mesma forma que a otimização anterior sendo a confguração idênticaa da Figura 4.27.
O problema convergiu com 8 iterações e 51 avaliações. Ao relizar um processode otimização o Ansys Workbench fornece mais de uma configuração possível, sendoessas configurações chamadas de pontos candidatos. O conjunto amostral geradotem o tamanho de 8 e foram gerados 3 pontos candidatos, sendo que estes últimossão apresentados na seção a seguir.
4.2.7 Resultados
Como resultados da otimização foram encontrados três pontos candidatos. Foiselecionada a opção Verify Candidate Points, que faz a verificação dos pontoscandidatos e com isso um dos três candidatos foi eliminado, o 1. Na tabela a seguirsão apresentados os pontos candidatos válidos:
Tabela 4.9: Pontos candidatos da nova otimização com restrições de frequênciasnaturais e tensão equivalente.
Variável Ponto candidato 2 Ponto candidato 2(Verificado)Largura da aba - peça 1 261,52 261,52
Altura da alma 204,34 204,34Largura da aba - peça 2 200 200
Nono modo (Hz) 97,154 96,822Décimo modo (Hz) 133,5 133,36
Máxima tensão equivalente (MPa) 80,292 69,437Massa da geometria(Kg) 1240,7 1240,7
72

Variável Ponto candidato 3 Ponto candidato 3(Verificado)Largura da aba - peça 1 266,49 266,49
Altura da alma 207,46 207,46Largura da aba - peça 2 200 200
Nono modo (Hz) 97,02 96,704Décimo modo (Hz) 133,7 134,09
Máxima tensão equivalente (MPa) 71,819 72,853Massa da geometria(Kg) 1250,9 1250,9
Diante do resultado da última otimização, conclui-se que o projeto ótimo é oponto candidato 2 que tem a massa de 1240,7 Kg, ou seja, houve um redução de47,5% do peso da configuração inicial da estrutura e o fator de segurança estáticoda nova configuração é 3,6.
4.3 Configuração final da estrutura
As variáveis de projeto chegaram aos seguintes valores ótimos:
Tabela 4.10: Valores ótimos das variáveis de projeto.
Variável Valor [mm]Peça 1
Largura da aba 261,52Espessura da alma 6,3
Peça 2Largura da aba 200
Espessura da alma 8Peça 1 e Peça 2
Altura da alma 204,34Espessura da aba 6,3
Com o objetivo de aumentar o fator de segurança, foram adicionados 8 reforçosfeitos a partir de vigas U e essa configuração é mostrada na figura abaixo. O desenhocompleto se encontra no Apêndice A.
Figura 4.39: Implementação de novos reforços na estrutura final.
73

A partir de uma análise estrutural estática da nova configuração (Figura 4.40),chegou-se a uma tensão equivalente máxima de 27,449 MPa, ou seja, o fator desegurança estático da estrutura é de 9,1 e a massa passou a ser 1280,8 Kg.
Figura 4.40: Tensão equivalente da configuração final da estrutura.
Os resultados da análise modal são mostrados na tabela a seguir e estes permitemchegar a conclusão que os modos de frequência da nova configuração diferem dafrequência de rotação da máquina.
Tabela 4.11: Modos de frequência da configuração final.
Modo Frequência (Hz)1 7,34872 8,00523 49,614 53,4875 82,0986 82,8477 84,7698 90,1799 124,3810 150,811 175,0412 176,7513 181,5514 184,7515 190,54
74
Capítulo 5
Considerações finais
5.1 Conclusões
Neste trabalho foi proposta uma nova configuração para uma estrutura quesuporta uma máquina geradora de potência. Para isso, foi feito um plug-in entredois softwares, o SolidWorks e o Ansys. Como não foi possível colocar relações entreas cotas das espessuras usando uma configuração para elemento Shell, optou-se porutilizar o elemento Solid 187, que se mostrou satisfatório.
Através dos resultados da análise estrutural estática e modal feitas pelo métodode elementos finitos foram realizadas duas otimizações, sendo estas otimizaçõesdimensionais e as cotas que serviram de variáveis de projeto foram as dimensõesde perfis H. Foi proposto gerar estes perfis a partir de chapas soldadas.
Na primeira otimização, foi possível fazer uma otimização contínua e entreos valores obtidos estavam as espessuras das chapas que passariam a compor aestrutura. A partir destes valores, foi feita uma busca dos valores discretos dasespessuras de chapas existentes no mercado para que estes fossem fixados. Nasegunda otimização, foram utilizadas as demais variáveis de projeto que puderamter seus valores ótimos obtidos mediante uma otimização contínua.
Como a análise da função real era dispendiosa e demandaria muito esforçocomputacional foi selecionado o método de Response Surface do pacote DesignExploration do Ansys. Para o experimento de projeto foi selecionado a opção daamostragem por hipercubo latino (LHS), para a superfície de resposta, o Kriging, ecomo algoritmo de otimização, o NLPQL.
A massa ótima da estrutura depois da primeira otimização contínua foi de 1203,1Kg. Depois foram selecionados os valores discretos comerciais para as espessuras dechapas mais próximos dos encontrados nesta otimização e chegou-se a uma soluçãodiscreta aproximada com a massa de 1450 Kg. Em seguinda, foi realizada uma novaotimização chegando a um valor de 1240,7 Kg. Analisando pelo lado da segurança,
75

foi feito uma avaliação de onde as tensões eram mais críticas e impostos oito reforçosque geraram um fluxo de tensão nesses lugares reduzindo assim as tensões máximas.A massa da configuração final foi de 1280,8 Kg com um fator de segurança estáticode 9,1.
Conclui-se que a aplicação de otimização no projeto da estrutura forneceu umaconfiguração melhor onde foi conseguida uma redução de massa de 1082, 5 Kg quandocomparada a estrutura inicial e a configuração final. Este tipo de análise quando setêm um programa CAD, onde geralmente já é feito o desenho do projeto, e o Ansysnão demanda um tempo tão elevado e fornece boas configurações.
5.2 Sugestões para trabalhos futuros
Propõem-se como parte de estudos futuros os seguintes tópicos:.
• Estudar estratégias para desenvolver a análise com elemento Shell.
• Com o auxílio de um instrumento, como o cluster, fazer simulação do conjuntocompleto, para assim obter valores mais confiáveis das frequências.
• Fazer uma interface entre as análises do Ansys e FAIPA ou FDIPA que estãoem Matlab ou Scilab para que possa ser feita a otimização com um algoritmodiferente e comparar os resultados.
• Gerar a geometria no próprio Ansys, repetir os demais passos realizados nessetrabalho com diferentes tipos de estruturas e fazer uma interface com umsoftware de fácil acesso e baixo custo, como o Excel, onde nele possa selecionara geometria, impor os carregamentos e assim obter o projeto ótimo, ou seja,automatizar todo o processo. Isso seria vantajoso em empresas que trabalhamcom um número considerável de estruturas em que os carregamentos vãovariando.
• Fazer uma análise mais detalhada do custo da estrutura inicial e final, parasaber em espécie o valor economizado.
76
Apêndice A
Desenho técnico das estruturas
77
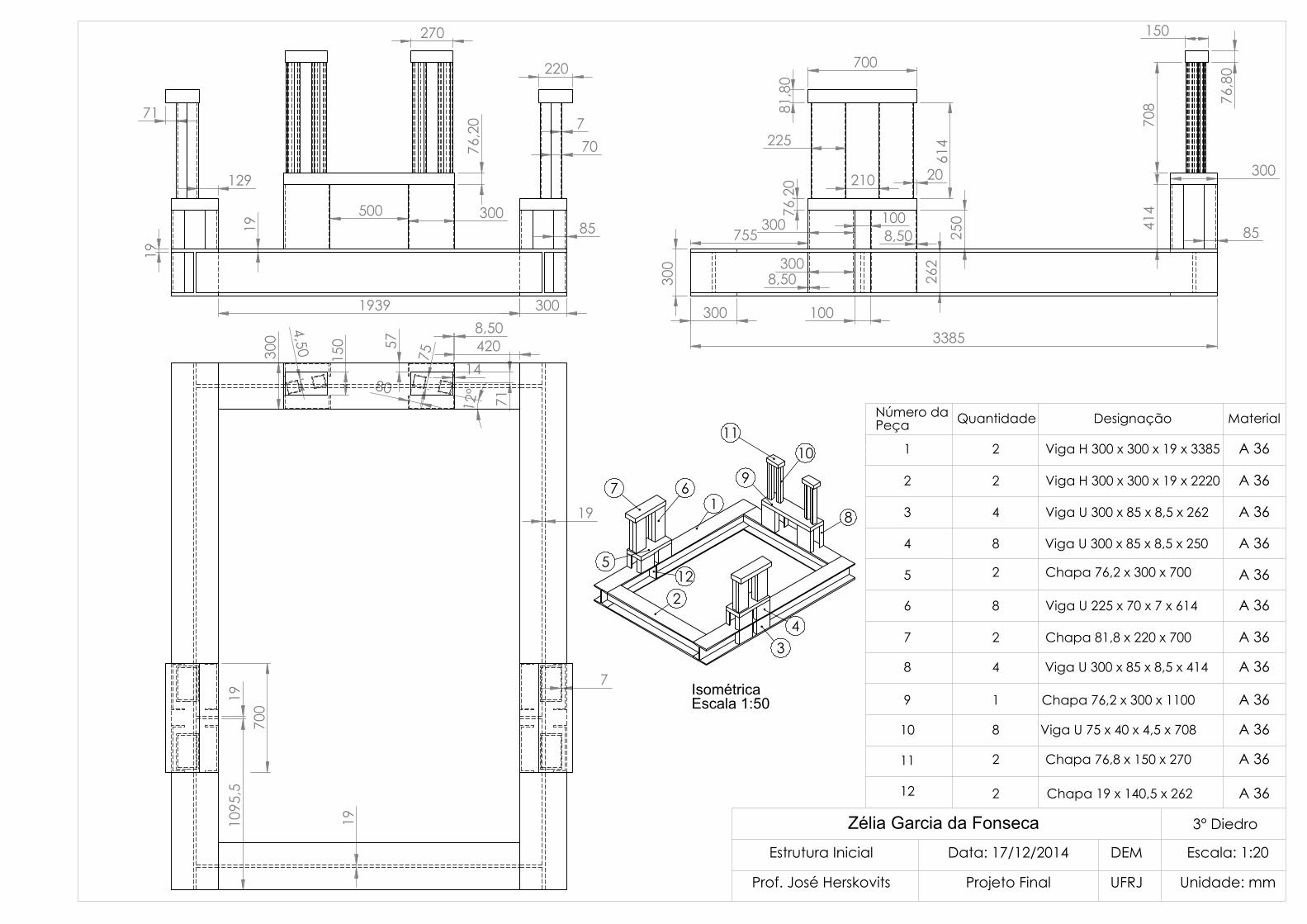
19
300 1939
300
19
220
270
70
85 500
71
76,
20
129
7
250
81,
80
76,
20
614
225
300
700
300
300
76,
80
708
4
14
8,50
150
210 20
755
3385
100
300 100
85 8,50
300
262
420
19
19
300
150
8,50
12°
14
71
57
19 7
75
80
4,50
109
5,5
700
Isométrica Escala 1:50
1
2
34
5
67
8
910
12
11
Zélia Garcia da Fonseca 3° Diedro
Escala: 1:20
Unidade: mmUFRJ
DEM
Projeto FinalProf. José Herskovits
Estrutura Inicial Data: 17/12/2014
Número daPeça Quantidade Designação
1
2
3
4
5
6
7
8
9
10
11
12
2
2
4
8
2
8
2
4
1
8
2
2
Viga H 300 x 300 x 19 x 3385
Viga U 300 x 85 x 8,5 x 262
Chapa 76,2 x 300 x 700
Chapa 81,8 x 220 x 700
Chapa 76,2 x 300 x 1100
Chapa 76,8 x 150 x 270
Chapa 19 x 140,5 x 262
Viga H 300 x 300 x 19 x 2220
Viga U 300 x 85 x 8,5 x 250
Viga U 225 x 70 x 7 x 614
Viga U 300 x 85 x 8,5 x 414
Viga U 75 x 40 x 4,5 x 708
Material
A 36
A 36
A 36
A 36
A 36
A 36
A 36
A 36
A 36
A 36
A 36
A 36
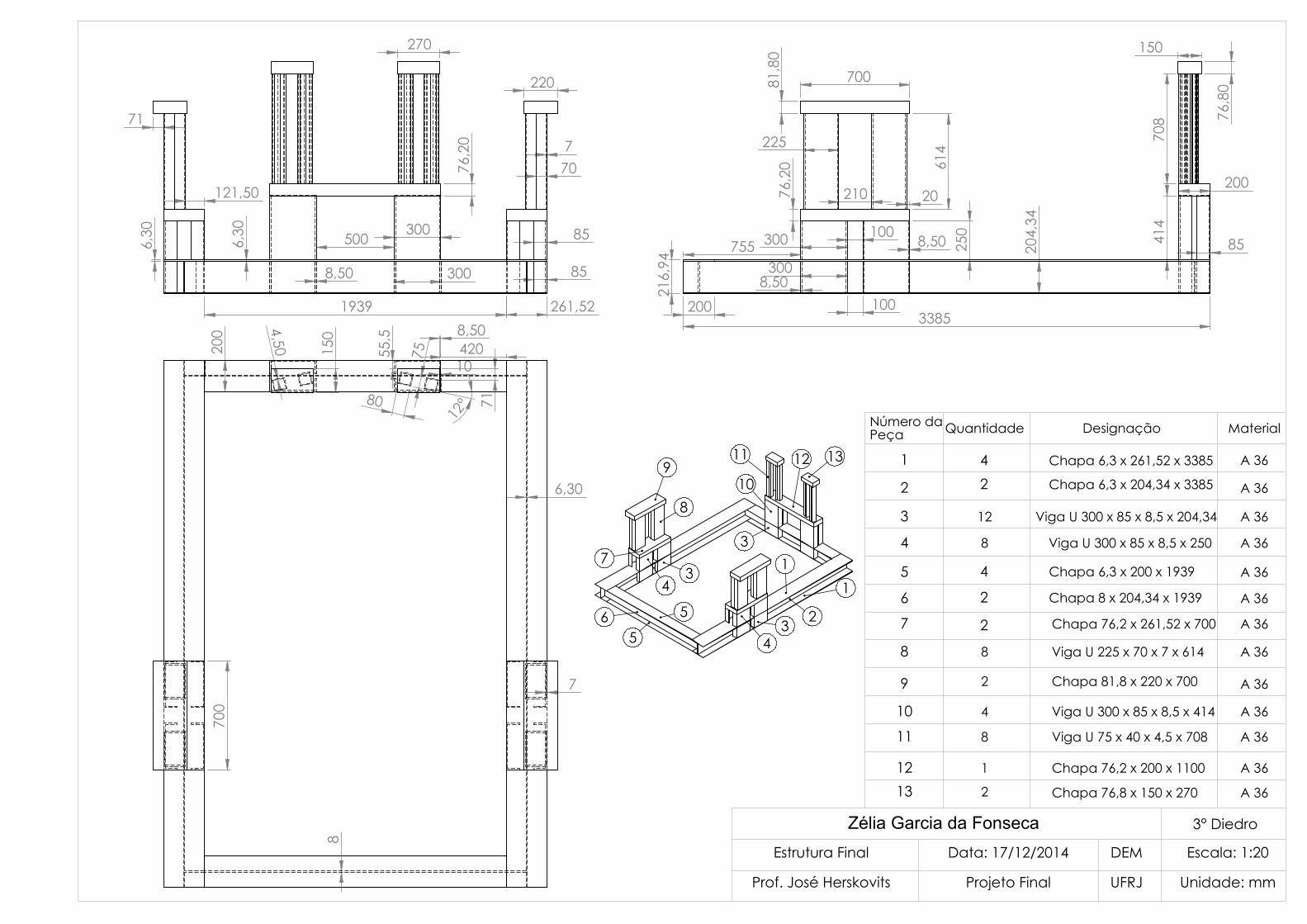
270
220
6,3
0
71
6,3
0
1939 261,52
7 70
300 8,50 85
121,50
500 300
76,
20
85
3385
700
81,
80
100
300 8,50
100
250
216
,94 2
04,3
4
76,
20
225
210
614
150
76,
80
708
4
14
85
200
755 300
20
8,50
200
700
7
4,50 150
55,
5 80
75
10
8,50
12°
420
71
200
6,30
8
1
2
1
34
565
34
7
8
9
3
10
1211 13 Chapa 6,3 x 261,52 x 3385
Chapa 6,3 x 204,34 x 3385
Chapa 6,3 x 200 x 1939
Chapa 8 x 204,34 x 1939
42
2
4
2
Zélia Garcia da Fonseca 3° Diedro
Escala: 1:20
Unidade: mmUFRJ
DEM
Projeto FinalProf. José Herskovits
Estrutura Final Data: 17/12/2014
Número daPeça Designação
1
2
3
4
5
6
7
8
9
10
11
12
8
2
8
4
1
8
2
Viga U 300 x 85 x 8,5 x 204,34
Viga U 300 x 85 x 8,5 x 250
Chapa 76,2 x 261,52 x 700
Viga U 225 x 70 x 7 x 614
Chapa 81,8 x 220 x 700
Viga U 300 x 85 x 8,5 x 414
Chapa 76,2 x 200 x 1100
Viga U 75 x 40 x 4,5 x 708
Chapa 76,8 x 150 x 270
Material
A 36
A 36
A 36
A 36
A 36
A 36
A 36
A 36
A 36
A 36
A 36
Quantidade
A 36
A 36
1213

Referências Bibliográficas
[1] HERSKOVITS, J., “A View on Nonlinear Optimization”, In: Advances inStructural Optimization, v. 25, chap. 3, pp. 71–116, Kluber AcademicPublishers, 1995.
[2] LUENBERGER, D. G., YE, Y., Linear and Nonlinear Programming. 3rd ed.Springer: Nueva York, USA, 2008.
[3] Comercial Gerdau, Av. Prosperidade, 250/300, Prosperidades, São Caetano doSul, SP, Brasil, Catálogo de Produtos, 2011, Av. Prosperidade, 250/300,Prosperidades, São Caetano do Sul, SP, Brasil.
[4] RAO, S., Vibrações Mecânicas. 4th ed. Person Education, 2009.
[5] SRINIVASULU, P., VAIDYANATHAN, C. V., Handbook of Machine Foundati-ons. Tata McGraw-Hill Publishing Company LTD., 1976.
[6] G. CHENG, Z. K., WANG, G., “Dynamic optimization of a turbine foundation.”Structural Optimization, v. 13, pp. 244–249, 1997.
[7] RAMOS, H. O. C., Um algoritimo para otimização restrita com aproximação dederivadas, Ph.D. Thesis, UFRJ/COPPE, 2011.
[8] MCKAY, M. & CANOVER, W., “A Comparison of Three Methods for SelectingValues of Input Variables in the Analysis of Output From a ComputerCode”, Technometrics, v. 42, pp. 55–61, 2000.
[9] PENNA, D. D. J., Definição da Árvore de Cenários de Afluências para oPlanejamento da Operação Energética de Médio Prazo, Ph.D. Thesis,PUC-Rio, 2009.
[10] ANSYS Inc., Design Exploration User Guide, 2012 .
[11] SCHITTKOWSKI, K., The nonlinear programming method of Wilson, Han andPowell. Part 1: Convergence analysis. v. 38. Numerische Mathematik,1981.
80

[12] ANSYS Inc., U.S.A. Ansys Mechanical APDL Element Reference, 2011 .
[13] OÑATE, E., Cálculo de estructuras por el Método de Elementos Finitos.Análisis estático Lineal. 1st ed. Centro Internacional de Métodos enIngeniería: España, 1992.
[14] RICHARDG. BUDYNAS, J. K. N., Elementos de Máquinas de Shigley: Projetode Engenharia Mecânica. Mc Graw Hill, 2011.
81
Related Documents











