Euclidean/Non- Euclidean Geometry Abouttwo thousand years ago, Euclid summcr-ized the geometric knowledge of his day. He developed this geometry based upon tien postulates. The wording of one of his postulates, known as the parallel postulate, was very awkward and received much attention from mathematicians. These mathematicians worked diligently to prove that the conclusions in Euclidean geometry were independent of this parallel postulate. A mathematician named Saccheri wrote a book called Euclid Freed of Every Flaw in 1733. His attempt to show that the parallel postulate was not needed actually laid the foundation for the development of the two branches of non-Euclidean geometry. Euclidean geometry assumes that there is exactly one parallel to a given line through a point not on that line. The branch of non-Euclidean geometry called spherical or Rierannian assumes that there are no lines parallel to a given line through a point not on that line. The other branch of non-Euclidean geometry called hyperbolic or Lobachevskian geometry assumes that there is more than one line parallel to a given line through a point not on that line. Physical models for these geometries allow us to visualize some of their differences. The model for Euclidean geometry is the flat plane. The model for hyperbolic geometry is the outside bell of a trumpet. The model for spherical geometry is the sphere. We have proved that the sum of the angles of a triangle is 180°. On a globe, is it possible to have a triangle with more than one right angle? Is this a Euclidean triangle? Why or why not? __ ~I _ I. The sides of this triangle (on the globe) curve through a third dimension. The surface upon which the triangle is drawn affects the conclusions about the sum of its angles. Euclidean geometry is true for measurement over relatively short distances (when the surface of the earth approximates a flat plane). Remember the physical experiences possible when this geometry was developed. The geometry of Einstlein's theory of relativity is the geometry of no parallel lines (spherical or Riemannian). Notice that these non-Euclidean geometries are derived from different postulates. A second type of ~on-EucHdean geometry results when Q single definition is changed. Euclidean geometry defines distance "as the crow flies." In other words, distance is the length of the segment determined by the two points. However, travel on the surface of the earth (the real world) rarely follows this ideal straight path. II. y - I I """I - .•.. I~I ~I " ., I ~ J ! I ~ ~ • I " .~ ~ " f l\I 7Jaa -" ~ I I I I x On the grid at the right, locate point A with coordinates (-4, -3) and point B with coordinates (2, 1). Use the Pythagorean Theorem to find the Euclidean distrnce between A and~. 151:: l.~ Now consider that the only paths that can be traveled are along grid lines. This distance is called the "taxi-distance." What is this "taxi- distance" from A to B? 10 .. Points on a taxicab ~rid can only be located at the intersections of horizontal and vertical lines. • One unit will be one grid unit. L • Therefore, the numerical coordinates of points in taxicab geometry must always be wh~t W\\> m'l("S • The taxi-distance between 2 points is the smallest number of grid units that an imaginary taxi must travel to get from Jne point to another. I

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Euclidean/Non- Euclidean Geometry
Abouttwo thousand years ago, Euclid summcr-ized the geometric knowledge of his day. He developed thisgeometry based upon tien postulates. The wording of one of his postulates, known as the parallelpostulate, was very awkward and received much attention from mathematicians. These mathematiciansworked diligently to prove that the conclusions in Euclidean geometry were independent of this parallelpostulate. A mathematician named Saccheri wrote a book called Euclid Freed of Every Flaw in 1733. Hisattempt to show that the parallel postulate was not needed actually laid the foundation for thedevelopment of the two branches of non-Euclidean geometry. Euclidean geometry assumes that there isexactly one parallel to a given line through a point not on that line. The branch of non-Euclidean geometrycalled spherical or Rierannian assumes that there are no lines parallel to a given line through a point noton that line. The other branch of non-Euclidean geometry called hyperbolic or Lobachevskian geometryassumes that there is more than one line parallel to a given line through a point not on that line.
Physical models for these geometries allow us to visualize some of their differences. The model forEuclidean geometry is the flat plane. The model for hyperbolic geometry is the outside bell of a trumpet.The model for spherical geometry is the sphere.
We have proved that the sum of the angles of a triangle is 180°. On a globe, is it possible to have atriangle with more than one right angle? Is this a Euclidean triangle? Whyor why not? __ ~I _
I.
The sides of this triangle (on the globe) curve through a third dimension. The surface upon whichthe triangle is drawn affects the conclusions about the sum of its angles. Euclidean geometry is truefor measurement over relatively short distances (when the surface of the earth approximates a flatplane). Remember the physical experiences possible when this geometry was developed. Thegeometry of Einstlein's theory of relativity is the geometry of no parallel lines (spherical orRiemannian). Notice that these non-Euclidean geometries are derived from different postulates.
A second type of ~on-EucHdean geometry results when Q singledefinition is changed. Euclidean geometry defines distance "as thecrow flies." In other words, distance is the length of the segmentdetermined by the two points. However, travel on the surface of theearth (the real world) rarely follows this ideal straight path.
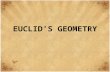
II. y
- II"""I - .•..
I~I ~I " .,I ~ J ! I
~ ~ • I
" .~
~ " f
l\I7Jaa -" ~I I I I
xOn the grid at the right, locate point A with coordinates (-4, -3) andpoint B with coordinates (2, 1). Use the Pythagorean Theorem to findthe Euclidean distrnce between A and~. 151:: l.~
Now consider that the only paths that can be traveled are along gridlines. This distance is called the "taxi-distance." What is this "taxi-distance" from A to B? 10 ..
Points on a taxicab ~rid can only be located at the intersections of horizontal and vertical lines.• One unit will be one grid unit. L• Therefore, the numerical coordinates of points in taxicab geometry must always be wh~t W\\> m'l("S• The taxi-distance between 2 points is the smallest number of grid units that an imaginary taxi must
travel to get from Jne point to another.
I

1. Two points determine a line segment. (a segment is the shortest distance between two points)(a) Draw a taxi sebment from point A to point B. What is the length of this
segment? --!I..--(b) Is this the onl~ taxi segment between the two points? 1')0
If not, hOlNrndny different taxi segments can you draw between points A
and B?' I - (". ..(c) In taxicab georetry, do two points determine a unique segment? 1'\0
2. A circle is the set of points in a plane that are the same distance from a given point in theplane.(a) On the grid at the right, draw a taxi-circle with center P and a
radius of 6.
(b) Is this the only taxi-circle that can be drawn with this center andthis radius? .I.. e.~_ If not, how many different taxi-circles canbe drawn? ---f~--
Can you draw J Euclidean circle without lifting your pencil?~; the "taxi-circle"? 00 The "taxi-circle" is aneAmple of di~crete mathematics where the sample space is a setof individual points (not a continuous set such as a number line).
~o"'" (..o"\'y\\)O~~A midpoint, M, of a segment, AB, is a point on the segment such that AM = MB.(a) Find the midptnt of segment PQ. I i"Q I
Is there mor, than one midpoint? ~
(c) Find the midPrint of segment PT.dot~'~-t eY-\~-\-~ (d) What conclusipn can you make about the number of midpoints in taxicab
geometry? ex'~\ w~e~\e (\~~ \S e~~\\·,tl\Q.,\ ~o ('t I~J('Jn\~ wM.Y\ cl\s"-.~f.\~ 0<1. ¥\ Ot.e riTIL......--L-..l-!s--J1
4. A point is on a segment's perpendicular bisector if and only if it is the same distance from eachof the segment's endpoints.
(a) Fin~ all point~. tha~ satisfythis definition in taxicabgeometry for segrrlent DE.
(c) What concluS;rn con you make about perpendiculcr- bisector-s in rcxiccb geometry?
on"i e ie~ d·,~\at\tP'Jho.~e ~efet"a\'\)\Q,t 'n'Se(\Of~
I
I D I I
I I j !I
I 'I'E I jIII( Ir-
II ,II
(b) Find all points that satisfythis definition in taxicabgeometry for segment ST.II
51• 1I i I
I JI I Il
i / I II I I I j
T
i I iI I I
r-T- Ij I~IB I
I J
I-- I I, I (
AI I I I '-LJI I ' I
! 1 J
! i ! I I I i ! ,i I i !I
i I T ! I I II , I I I I, ! ! I iI I I i I T ! I
i I I I ! j I i .,I I T I i Pl i I ! I I-+-+--!
VI1 I I ! I ! I: I i I I 1/ I ,
I I
1 i,
I 1 J/ Ij j ! I i ! i/'l' I
! I ! i.l ! !I I I VI' I
! I I,!
I (, I f i I I
I I I II
I~T-..•.
1 I i
I I-
(c) Find all points that satisfythis definition in taxicabgeometry for segment KL..
I dde£ :" it.1iJ~
I iI
! I LI I~I
I !., j
!,") K j
I
I ! II ! I !
Related Documents