




Mechanika Budowli I
WPROWADZENIE DO
PROGRAMU FEAS - KAM
Opracował:
mgr inż. Piotr Bilko
Katedra Geotechniki i Mechaniki Budowli
Wersja - 04.11.2006 r.
██████████████████████████████████████████████████ FINITE ELEMENT ANALYSIS SYSTEM██████████ ██████████ ██████████ ████████████ ██ ██ ██ ████ ██████ ██████████ ████████████ ██ ██ ██ ████ ██████████ ██ ██ ██
████████████████████████████████████████████████

2
Informacje ogólne
Program FEAS v 1.0 (Finite Element Analysis System) jest systemem opracowanym na Politechnice
Warszawskiej przez zespół pod kierunkiem p. dr Z. Kasprzyka i przeznaczonym do analizy konstrukcji
(prętowych, powierzchniowych) w zakresie statyki, dynamiki oraz stateczności. Podsystem KAM (
komponowanie algorytmów mechaniki) jest narzędziem pomocniczym w nauczaniu mechaniki konstrukcji.
• Podsystem KAM realizuje podstawowe funkcje rachunku macierzowego wzbogaconych o generowanie
macierzy Metody Elementów Skończonych
• Opracowany zestaw komend umożliwia komponowanie algorytmów analizy statycznej (w zakresie
liniowym i nieliniowym) oraz dynamicznej konstrukcji przy zastosowaniu MES, poznany na zajęciach
Mechaniki Budowli
• W ramach podsystemu opracowano interpreter komend, który jest uruchamiany po załadowaniu
programu (plik wykonywalny kam.exe).
• Każde polecenie (komenda) ma swój specyficzny format oraz oddzielane spacją parametry umieszczane
w tej samej linii lub w liniach następnych :
Nazwa_komendy parametr_typu _macierz parametr_typu_wektor parametr_liczba
• Możliwe są dwa rodzaje pracy z systemem: interakcyjny (polecenia podawane są bezpośrednio z
klawiatury) lub wsadowy - polecany ( wszystkie komendy zapisane są w pliku wsadowym o rozszerzeniu
*. kam, wywoływanym z poziomu programu poleceniem wyk nazwa_pliku_wsadowego.
•Uwaga: Program FEAS- KAM pracuje w trybie tekstowym systemu MS-DOS (lub sesji MS-DOS w
Windows)
3
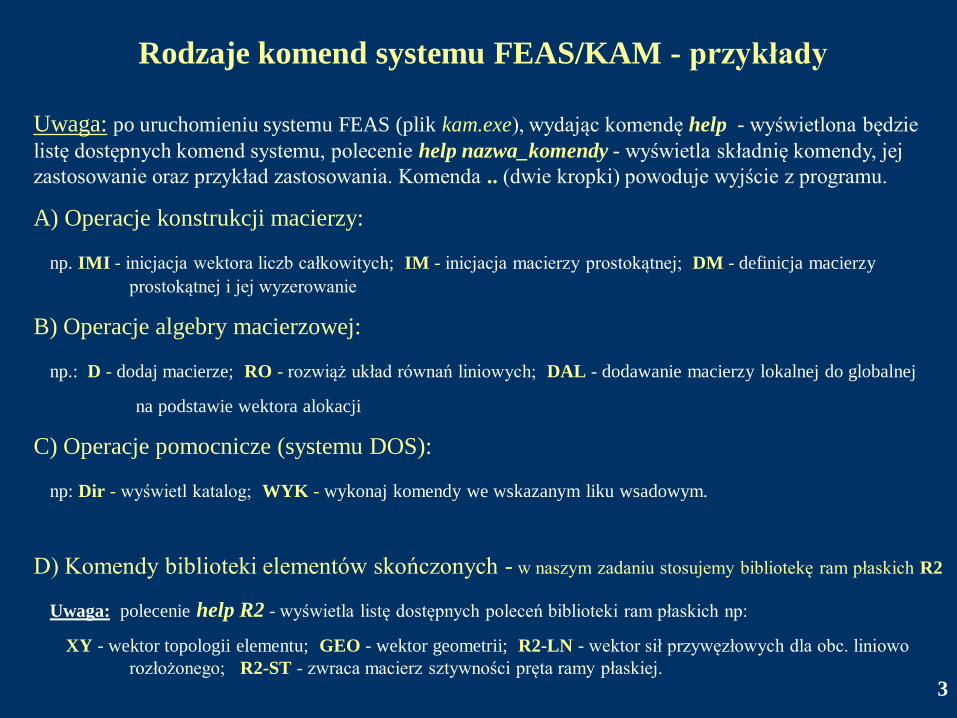
Rodzaje komend systemu FEAS/KAM - przykłady
Uwaga: po uruchomieniu systemu FEAS (plik kam.exe), wydając komendę help - wyświetlona będzie
listę dostępnych komend systemu, polecenie help nazwa_komendy - wyświetla składnię komendy, jej
zastosowanie oraz przykład zastosowania. Komenda .. (dwie kropki) powoduje wyjście z programu.
A) Operacje konstrukcji macierzy:
np. IMI - inicjacja wektora liczb całkowitych; IM - inicjacja macierzy prostokątnej; DM - definicja macierzy
prostokątnej i jej wyzerowanie
B) Operacje algebry macierzowej:
np.: D - dodaj macierze; RO - rozwiąż układ równań liniowych; DAL - dodawanie macierzy lokalnej do globalnej
na podstawie wektora alokacji
C) Operacje pomocnicze (systemu DOS):
np: Dir - wyświetl katalog; WYK - wykonaj komendy we wskazanym liku wsadowym.
D) Komendy biblioteki elementów skończonych - w naszym zadaniu stosujemy bibliotekę ram płaskich R2
Uwaga: polecenie help R2 - wyświetla listę dostępnych poleceń biblioteki ram płaskich np:
XY - wektor topologii elementu; GEO - wektor geometrii; R2-LN - wektor sił przywęzłowych dla obc. liniowo
rozłożonego; R2-ST - zwraca macierz sztywności pręta ramy płaskiej.
4
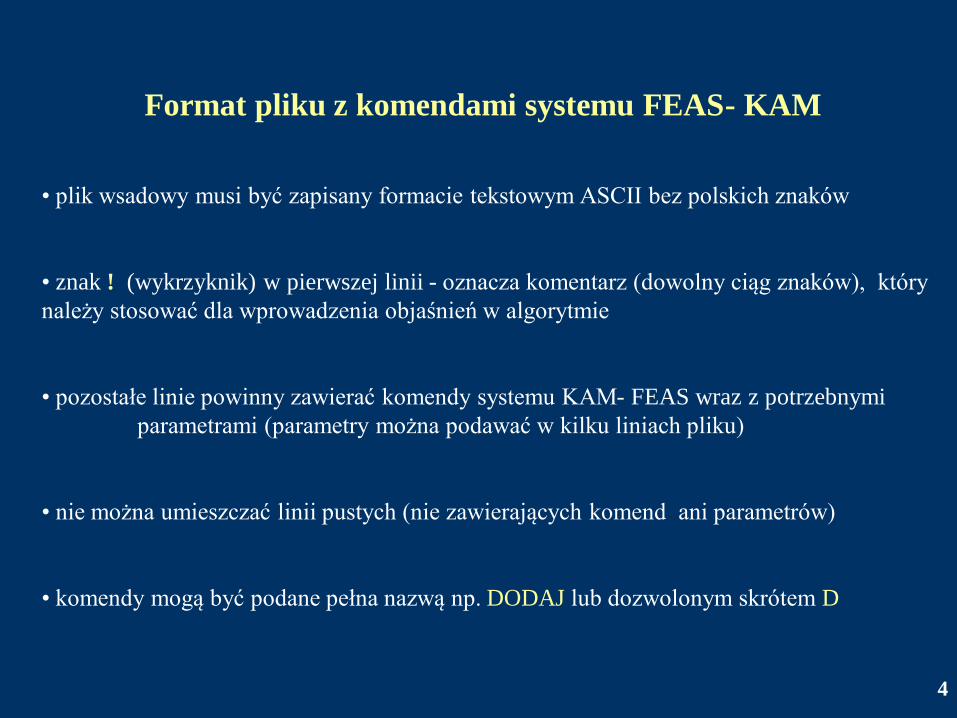
Format pliku z komendami systemu FEAS- KAM
• plik wsadowy musi być zapisany formacie tekstowym ASCII bez polskich znaków
• znak ! (wykrzyknik) w pierwszej linii - oznacza komentarz (dowolny ciąg znaków), który
należy stosować dla wprowadzenia objaśnień w algorytmie
• pozostałe linie powinny zawierać komendy systemu KAM- FEAS wraz z potrzebnymi
parametrami (parametry można podawać w kilku liniach pliku)
• nie można umieszczać linii pustych (nie zawierających komend ani parametrów)
• komendy mogą być podane pełna nazwą np. DODAJ lub dozwolonym skrótem D
5
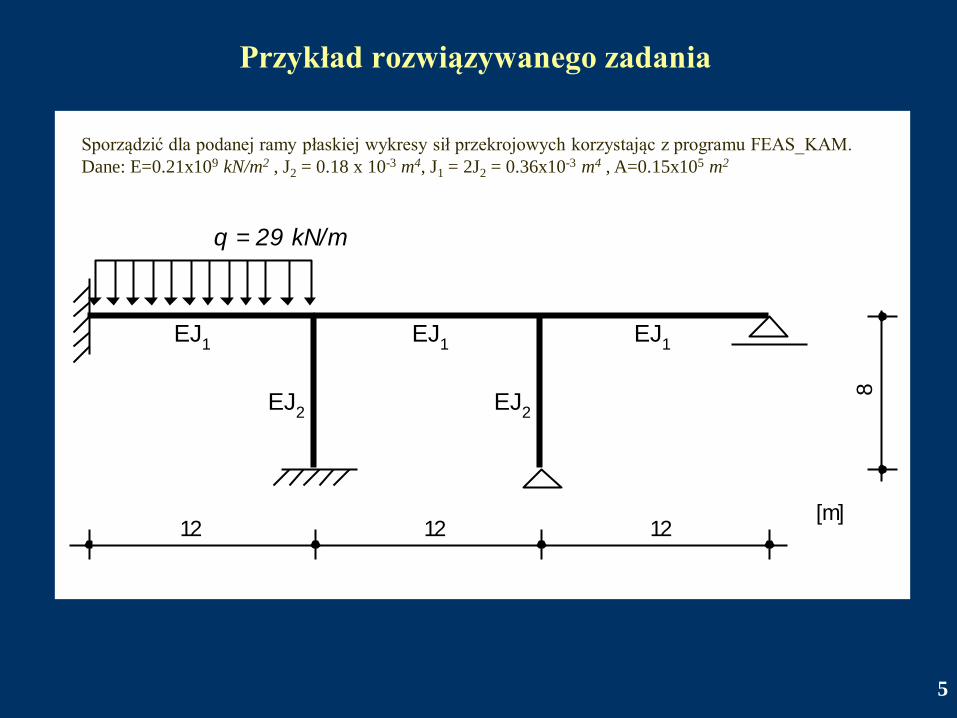
Przykład rozwiązywanego zadania
12 12 12
8
[m]
q = 29 kN/m
EJ1
EJ1
EJ1
EJ2
EJ2
Sporządzić dla podanej ramy płaskiej wykresy sił przekrojowych korzystając z programu FEAS_KAM.
Dane: E=0.21x109 kN/m2 , J2 = 0.18 x 10-3 m4, J1 = 2J2 = 0.36x10-3 m4 , A=0.15x105 m2
6
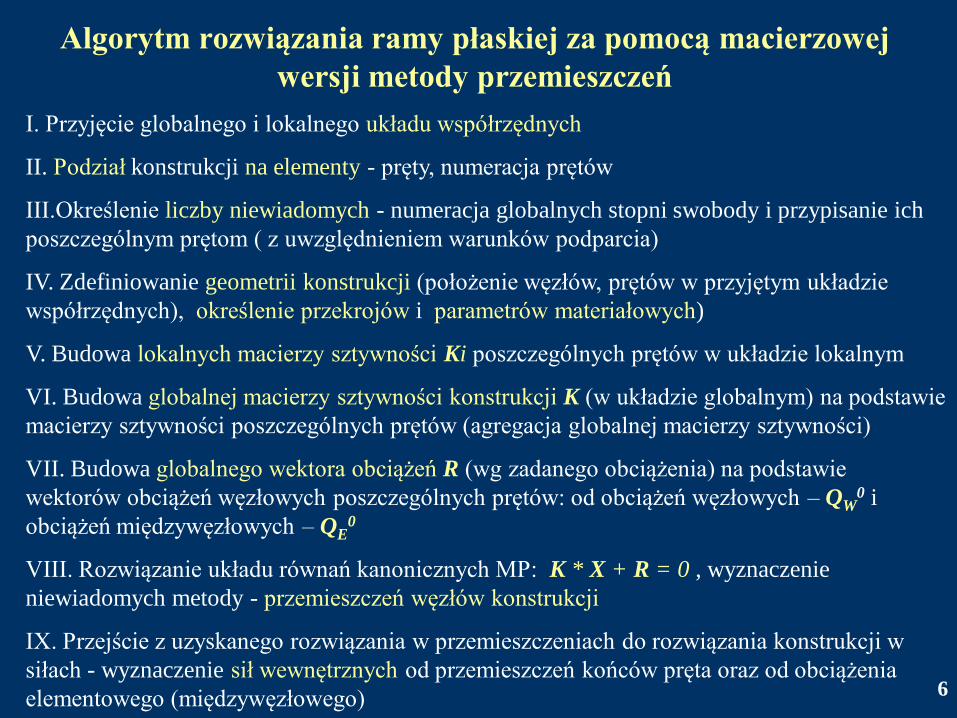
Algorytm rozwiązania ramy płaskiej za pomocą macierzowej
wersji metody przemieszczeń
I. Przyjęcie globalnego i lokalnego układu współrzędnych
II. Podział konstrukcji na elementy - pręty, numeracja prętów
III.Określenie liczby niewiadomych - numeracja globalnych stopni swobody i przypisanie ich
poszczególnym prętom ( z uwzględnieniem warunków podparcia)
IV. Zdefiniowanie geometrii konstrukcji (położenie węzłów, prętów w przyjętym układzie
współrzędnych), określenie przekrojów i parametrów materiałowych)
V. Budowa lokalnych macierzy sztywności Ki poszczególnych prętów w układzie lokalnym
VI. Budowa globalnej macierzy sztywności konstrukcji K (w układzie globalnym) na podstawie
macierzy sztywności poszczególnych prętów (agregacja globalnej macierzy sztywności)
VII. Budowa globalnego wektora obciążeń R (wg zadanego obciążenia) na podstawie
wektorów obciążeń węzłowych poszczególnych prętów: od obciążeń węzłowych – QW0 i
obciążeń międzywęzłowych – QE0
VIII. Rozwiązanie układu równań kanonicznych MP: K * X + R = 0 , wyznaczenie
niewiadomych metody - przemieszczeń węzłów konstrukcji
IX. Przejście z uzyskanego rozwiązania w przemieszczeniach do rozwiązania konstrukcji w
siłach - wyznaczenie sił wewnętrznych od przemieszczeń końców pręta oraz od obciążenia
elementowego (międzywęzłowego)

7
Szczegółowy algorytm rozwiązania zadania ramy płaskiej
programem FEAS - KAM
I. Przyjęcie układów współrzędnych: globalnego i lokalnego wg. wymagań programu:
Układ lokalny (prawoskrętny), i - początek , k- koniec prętaUkład globalny
II. Podział konstrukcji na pręty - numeracja prętów - patrz przykład na następnym slajdzie
i - numer pręta
III-V. Ustalenie liczby niewiadomych, ich numeracja (globalnych stopni swobody) ,
przypisanie do poszczególnych prętów - patrz przykład na następnym slajdzie
Uwaga!: W programie FEAS-KAM niewiadomą jest również kąt obrotu końca pręta w węźle
przegubowym. Niewiadome numeruje się w kolejności wyznaczonej przemieszczeniami
końców pręta wg globalnego układu współrzędnych.
i
k
x
yX
Y
8
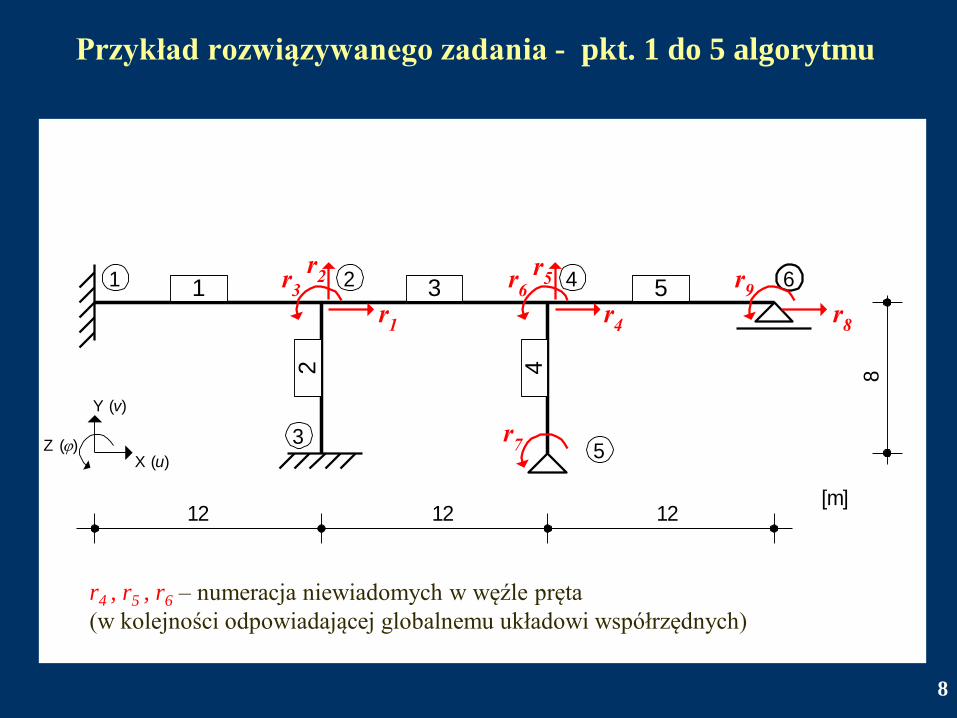
Przykład rozwiązywanego zadania - pkt. 1 do 5 algorytmu
1 2 4 6
53
12 12 12
8
[m]
1 3 5
42r1
r2r
3r6
r4
r5
r7
r9
r8
Y (v)
X (u)Z ()
r4 , r5 , r6 – numeracja niewiadomych w węźle pręta
(w kolejności odpowiadającej globalnemu układowi współrzędnych)
9
Szczegółowy algorytm ... – budowa macierzy sztywności
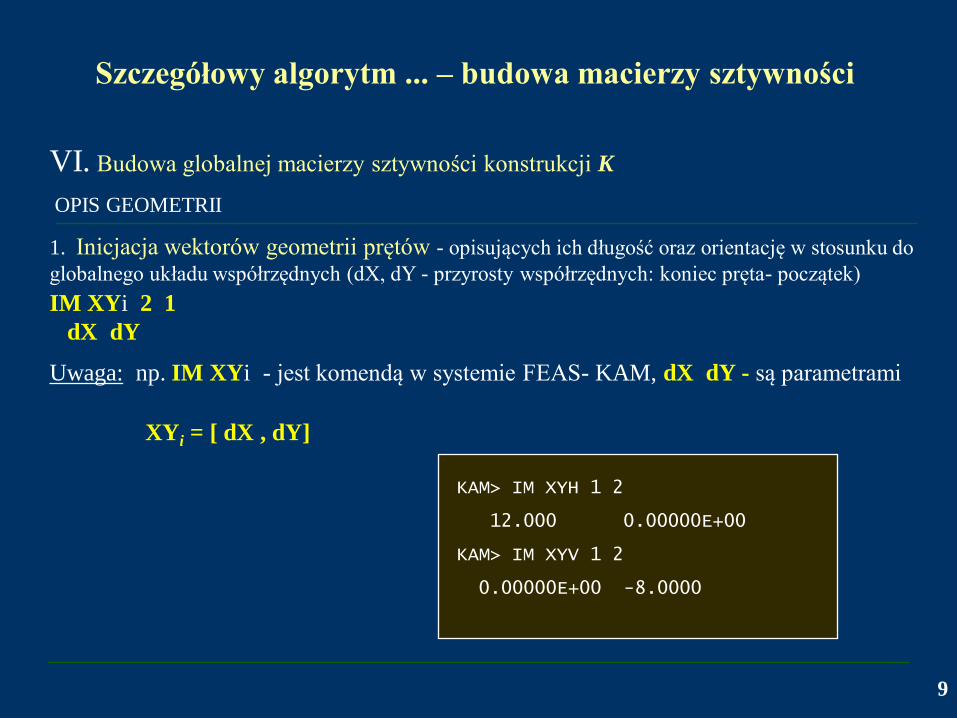
VI. Budowa globalnej macierzy sztywności konstrukcji K
OPIS GEOMETRII
1. Inicjacja wektorów geometrii prętów - opisujących ich długość oraz orientację w stosunku do
globalnego układu współrzędnych (dX, dY - przyrosty współrzędnych: koniec pręta- początek)
IM XYi 2 1
dX dY
Uwaga: np. IM XYi - jest komendą w systemie FEAS- KAM, dX dY - są parametrami
XYi = [ dX , dY]
KAM> IM XYH 1 2
12.000 0.00000E+00
KAM> IM XYV 1 2
0.00000E+00 -8.0000

10
Szczegółowy algorytm ... – budowa macierzy sztywności
2. Inicjacja wektorów własności materiałowych : E, Ro i alfaT - odpowiednio moduł Younga ,
gęstość właściwa, współczynnik rozszerzalności termicznej materiału
IM MATi 3 1
MAT i = [ E Ro alfaT ]T
KAM> IM MAT 3 1
0.21000E+09 0.00000E+00 0.00000E+00
KAM> WS MAT
Matrix MAT
1
-------------¬
1 | 0.21000E+09 |
2 | 0.00000E+00 |
3 | 0.00000E+00 |
--------------

11
Szczegółowy algorytm ... – budowa macierzy sztywności
3. Inicjacja wektorów własności geometrycznych : A, Jz - odpowiednio pole przekroju, moment
bezwładności przekroju
IM GEOi 2 1
GEO i = [ A Jz ]T
KAM> IM GEO1 2 1
15000. 0.36000E-03
KAM> IM GEO2 2 1
15000. 0.18000E-03
KAM> WS GEO1
Matrix GEO1
1
,-------------.
1 | 15000. |
2 | 0.36000E-03 |
‘-------------’

12
4. Inicjacja wektorów alokacji Ai - opisujących rozmieszczenie niewiadomych w
kolejnych prętach: n1, n2 n3 - nr niewiadomych na początku, n4n5n6- na końcu pręta.
IMI Ai 6
Ai = [ n1 n2 n3 n4 n5 n6 ]
Szczegółowy algorytm ... – budowa macierzy sztywności
KAM> IMI A1 6
0 0 0 1 2 3
KAM> IMI A2 6
1 2 3 0 0 0
KAM> IMI A3 6
1 2 3 4 5 6
KAM> IMI A4 6
4 5 6 0 0 7
KAM> IMI A5 6
4 5 6 8 0 9

13
5. Budowa macierzy sztywności prętów Ki na podstawie biblioteki R2 - XYi,
MATi, GEOi - poprzednio zdefiniowane macierze.
R2-ST Ki XYi MATi GEOi
Szczegółowy algorytm ... – budowa macierzy sztywności
KAM> R2-ST KH XYH MAT GEO1
KAM> R2-ST KV XYV MAT GEO2
KAM> WS KH
Matrix KH
1 2 3 4 5 6
-¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¬
1 - 0.26250E+12 0.00000E+00 0.00000E+00 -.26250E+12 0.00000E+00 0.00000E+00 -
2 - 0.00000E+00 525.00 3150.0 0.00000E+00 -525.00 3150.0 -
3 - 0.00000E+00 3150.0 25200. 0.00000E+00 -3150.0 12600. -
4 - -.26250E+12 0.00000E+00 0.00000E+00 0.26250E+12 0.00000E+00 0.00000E+00 -
5 - 0.00000E+00 -525.00 -3150.0 0.00000E+00 525.00 -3150.0 -
6 - 0.00000E+00 3150.0 12600. 0.00000E+00 -3150.0 25200. -
L¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦-

14
6. Zdefiniowanie i wyzerowanie globalnej macierzy sztywności konstrukcji K - n - jest liczbą niewiadomych metody
DM K n n
7. Wypełnienie globalnej macierzy sztywności K - na podstawie macierzy
sztywności prętów Ki i wektorów alokacji Ai
DAL K Ki Ai
Szczegółowy algorytm ... – budowa macierzy sztywności
KAM> DM K 9 9
KAM> DAL K KH A1
KAM> DAL K KH A3
KAM> DAL K KH A5
KAM> DAL K KV A2
KAM> DAL K KV A4

15
Szczegółowy algorytm ... - budowa wektora obciążeń węzłowych
VII. Budowa wektora obciążeń węzłowych R
1. Inicjacja wektorów pomocniczych DSi - określających obciążenie elementowe
(międzywęzłowe) prętów
- dla sił skupionych - wektor SIi, w którym Px, Py - składowe lokalne siły skupionej , Mz - moment
skupiony, ksi - bezwymiarowa odcięta położenia obciążenia
IM SIi 4 1
SI i = [ Px Py Mz ksi ]T
- dla obc. rozłożonego - wektor TRi, w którym qx1, qy1, mz1 oraz qx2, qy2, mz2 rzędne
składowych obciążenia rozłożonego w ukl. lokalnym na początku i końcu, ksi1, ksi2 -
bezwymiarowe odcięte wyznaczające początek i koniec obciążenia
IM TRi 8 1
TR i = [ qx1 qy1 mz1 qx2 qy2 mz2 ksi1 ks2 ]T
2. Budowa wektorów sił przywęzłowych QLi, QSi dla poszczególnych prętów-
sprowadzających obciążenie elementowe do końców prętów (na podstawie biblioteki R2)
R2-SS QSi XYi SIi - dla obciążeń skupionych elementowych
R2-LN QRi XYi TRi - dla obciążeń rozłożonych elementowych

16
Szczegółowy algorytm ... - budowa wektora obciążeń węzłowych
3. Zdefiniowanie i wyzerowanie sumarycznego wektora sił przywęzłowych konstrukcji
od obciążeń elementowych QEO - n - liczba niewiadomych
DM QEO n 1
4. Wypełnienie sumarycznego wektora sił przywęzłowych konstrukcji od obciążeń
elementowych QEO - na podstawie wektorów obciążeń poszczególnych prętów QSi lub QRi i
wektorów alokacji Ai
DWA QEO QSi Ai
DWA QEO QRi Ai
5. Inicjacja wektora obciążeń węzłowych konstrukcji QW0 - pochodzących od obciążeń
konstrukcji działających na jej węzły; w1, w2, w3, ... wn - składowe obciążeń węzłowych w
układzie globalnym w kolejności odpowiadanej kolejnym niewiadomym metody lub zero
IM QWO n 1w1 w2 w3 ..wi ... wn
6. Zdefiniowanie sumarycznego wektora wyrazów wolnych R
DM R n 1
7. Obliczenie sumarycznego wektora wyrazów wolnych R układu równań metody
przemieszczeń jako sumy wektora sił przywęzłowych QEO i obciążeń węzłowych QWO.
D QEO QWO R

17
KAM> DM R 9 1
KAM> IM TR1 8 1
0.00000E+00 -29.000 0.00000E+00 0.00000E+00 -29.000 0.00000E+00 0.00000E+00 1.0000
KAM> R2-LN QEO XYR TR1
KAM> DWA R QEO A1
KAM> WS R
Matrix R
1
-------------¬
1 - 0.00000E+00 -
2 - -174.00 -
3 - 348.00 -
4 - 0.00000E+00 -
5 - 0.00000E+00 -
6 - 0.00000E+00 -
7 - 0.00000E+00 -
8 - 0.00000E+00 -
9 - 0.00000E+00 -
---------------
Szczegółowy algorytm ... - budowa wektora obciążeń węzłowych

18
Szczegółowy algorytm ... - rozwiązanie układu równań MP
VIII. Rozwiązywanie układu równań K*X + R = 0
1. Kopiowanie utworzonej macierzy sztywności konstrukcji K i wektora wyrazów
wolnych QO:
KP R RKOP
KP K KKOP
2. Rozwiązanie układu równań kanonicznych metody przemieszczeń K* X = R Rozwiązanie (niewiadome geometryczne) umieszczone jest przez program w wektorze wyrazów
wolnych R.
RO KKOP RKOP KAM>KP R RKOP
KAM>KP K KKOP
KAM>RO KKOP RKOP
KAM> KP RKOP X
KAM> WS X
Matrix X
--------------¬
1 - -.62938E-10 -
2 - -.43286E-09 -
3 - 0.52271E-02 -
4 - -.55309E-10 -
5 - 0.37296E-10 -
6 - -.11302E-02 -
7 - 0.56510E-03 -
8 - -.55309E-10 -
9 - 0.56510E-03 -
---------------
19
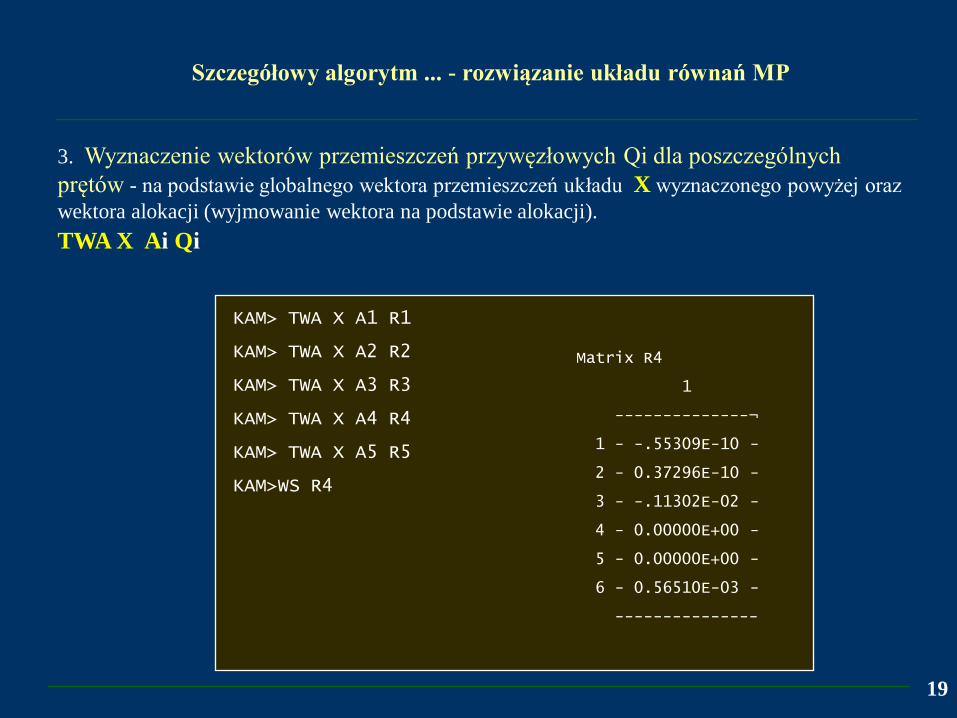
3. Wyznaczenie wektorów przemieszczeń przywęzłowych Qi dla poszczególnych
prętów - na podstawie globalnego wektora przemieszczeń układu X wyznaczonego powyżej oraz
wektora alokacji (wyjmowanie wektora na podstawie alokacji).
TWA X Ai Qi
Szczegółowy algorytm ... - rozwiązanie układu równań MP
KAM> TWA X A1 R1
KAM> TWA X A2 R2
KAM> TWA X A3 R3
KAM> TWA X A4 R4
KAM> TWA X A5 R5
KAM>WS R4
Matrix R4
1
--------------¬
1 - -.55309E-10 -
2 - 0.37296E-10 -
3 - -.11302E-02 -
4 - 0.00000E+00 -
5 - 0.00000E+00 -
6 - 0.56510E-03 -
---------------

20
IX. Wyznaczenie sił węzłowych
1. Wyznaczenie wektorów zawierających rzędne wykresów sił przekrojowych na końcach
oraz w ‘k’ przekrojach pośrednich - od przemieszczeń węzłów pręta NQi , obciążeń
międzywęzłowych.NSi, NLi, NMi
R2-NP NQi XYi MATi GEOi Qi k - od przemieszczeń końców pręta
R2-NS NSi XYi DSi k - od sił skupionych międzywęzłowych pręta
R2-NS NMi XYi DMi k - od momentów skupionych międzywęzłowych pręta
R2-NL NLi XYi DTi k - od obciążeń rozłożonych międzywęzłowych pręta
2. Wyznaczenie sumarycznych macierzy sił przekrojowych dla poszczególnych prętów jako
suma wektorów wyznaczonych w punkcie poprzednim, np
D NQi NSi Ni - dla pręta obciążonego siła skupioną
D NQi NLi Ni - dla pręta obciążonego obciążeniem rozłożonym
KP NQi Ni - dla pręta nieobciążonego
3. Wyświetlenie wyników - macierzy Ni , zapisanie do pliku
WS Ni
ZAP Ni nazwa_pliku
Wyniki umieszczone zostaną w pliku nazwa_pliku.mat w katalogu FEAS/BIN
Szczegółowy algorytm ... - rozwiązanie układu równań MP
21
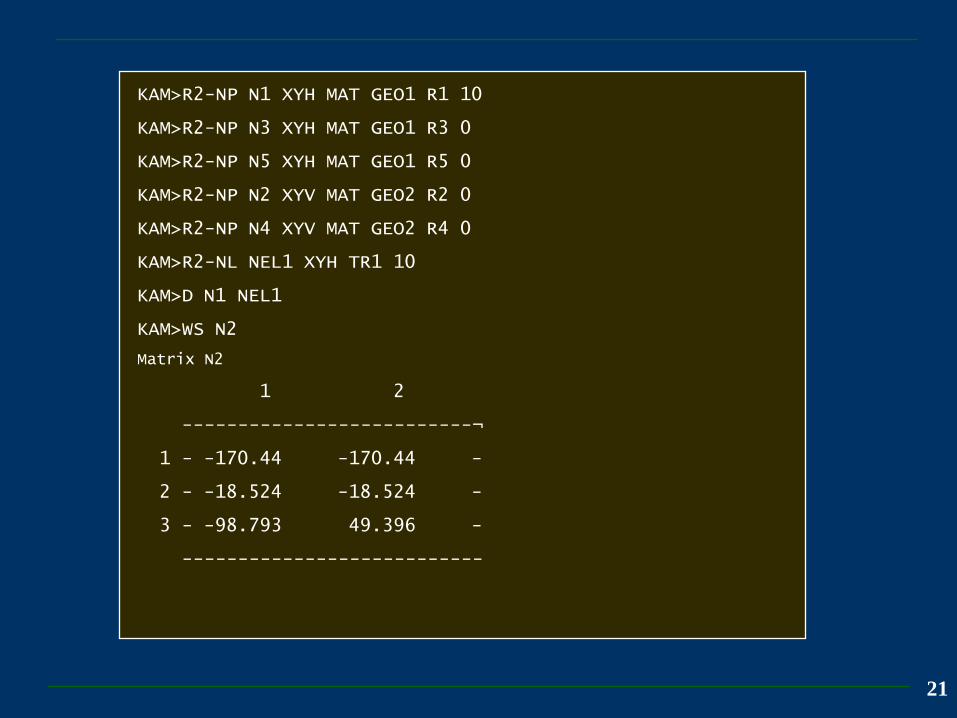
KAM>R2-NP N1 XYH MAT GEO1 R1 10
KAM>R2-NP N3 XYH MAT GEO1 R3 0
KAM>R2-NP N5 XYH MAT GEO1 R5 0
KAM>R2-NP N2 XYV MAT GEO2 R2 0
KAM>R2-NP N4 XYV MAT GEO2 R4 0
KAM>R2-NL NEL1 XYH TR1 10
KAM>D N1 NEL1
KAM>WS N2
Matrix N2
1 2
--------------------------¬
1 - -170.44 -170.44 -
2 - -18.524 -18.524 -
3 - -98.793 49.396 -
---------------------------
22
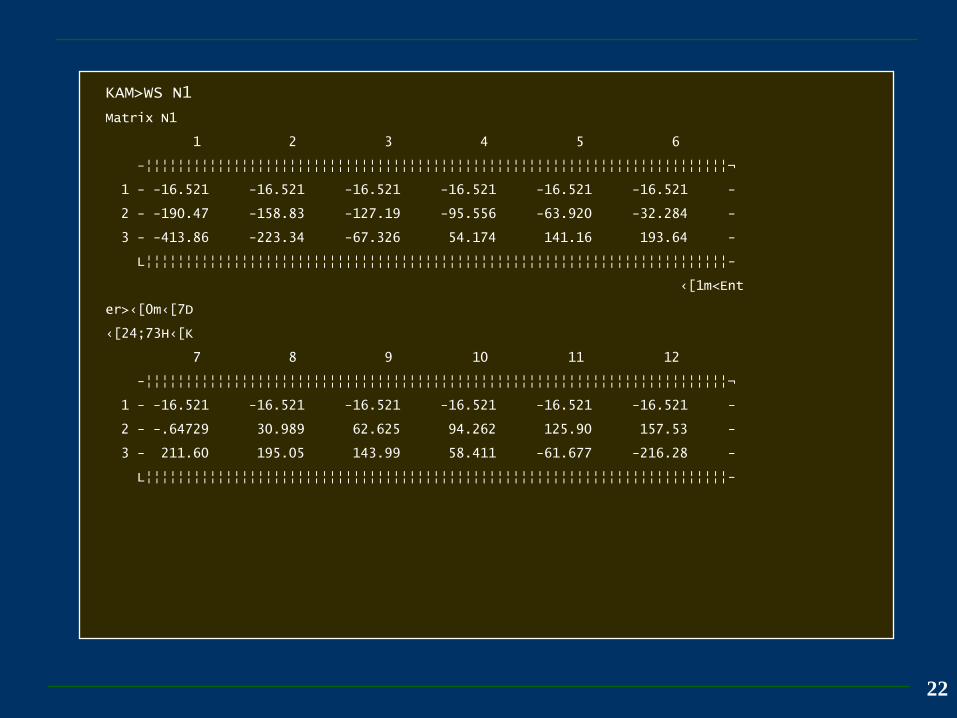
KAM>WS N1
Matrix N1
1 2 3 4 5 6
-¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¬
1 - -16.521 -16.521 -16.521 -16.521 -16.521 -16.521 -
2 - -190.47 -158.83 -127.19 -95.556 -63.920 -32.284 -
3 - -413.86 -223.34 -67.326 54.174 141.16 193.64 -
L¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦-
‹[1m<Ent
er>‹[0m‹[7D
‹[24;73H‹[K
7 8 9 10 11 12
-¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¬
1 - -16.521 -16.521 -16.521 -16.521 -16.521 -16.521 -
2 - -.64729 30.989 62.625 94.262 125.90 157.53 -
3 - 211.60 195.05 143.99 58.411 -61.677 -216.28 -
L¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦-

23
KAM>WS N3
Matrix N3
1 2
-¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¬
1 - 2.0026 2.0026 -
2 - -12.905 -12.905 -
3 - -117.48 37.381 -
L¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦-
KAM>WS N4
Matrix N4
1 2
-¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¬
1 - 14.685 14.685 -
2 - 2.0026 2.0026 -
3 - 16.020 0.00000E+00 -
L¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦-

24
KAM>WS N5
Matrix N5
1 2
-¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¬
1 - -.16964E-14 -.16964E-14 -
2 - 1.7801 1.7801 -
3 - 21.361 -.44409E-14 -
L¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦¦-
KAM>ZAP X WCR1
KAM>ZAP N1 WCR1
KAM>ZAP N2 WCR1
KAM>ZAP N3 WCR1
KAM>ZAP N4 WCR1
KAM>ZAP N5 WCR1
KAM>STOP

25
Sporządzenie wykresów sił wewnętrznych na podstawie otrzymanych wyników
Fragment pliku WCR1 z wynikami (niezwiązany z podanym przykładem)
MTM1 3 5
-22.5262 -5.97683 -11.8210
-22.5262 -5.97683 -5.84416
-22.5262 -3.47683 0.132671
-22.5262 -0.976829 1.10950
-22.5262 -0.976829 2.08633
MTM2 3 5
-5.97683 22.5262 11.8210
-5.97683 12.5262 -5.70524
-5.97683 2.52622 -13.2315
-5.97683 -7.47378 -10.7577
-5.97683 -17.4738 1.71609
Interpretacja macierzy NTMi sił przekrojowych pręta i-tego:
•wiersz 1-szy zawiera składowe N, T, M w przekroju początkowym pręta
•wiersz ostatni zawiera składowe N, T, M w przekroju końcowym pręta
•kolejne kolumny są odpowiednio siłą osiowa, siła tnącą i momentem zginającym w przekroju
•dodatnie zwroty momentów zginających zależne są od obranego układu lokalnego.

26
Sporządzenie wykresów sił wewnętrznych na podstawie otrzymanych wyników
413,9
211,59
216,3117,5
98,8
49,4
16,0
37,4
21,4
190,5
-157,5
18,5
-2,0
12,9-1,78
-16,5
-170,4 14,7
2,0
M
T
N

27
KONIEC





























