



Guns, Jellyfish, and SteelWhy we should mimic jellyfish for efficient underwater
propulsion

Cyro – biomimic jellyfish robot
Guns? I thought this was bioE!
Why does a gun recoil?How is a submarine propelled?

How does a jellyfish propel itself?
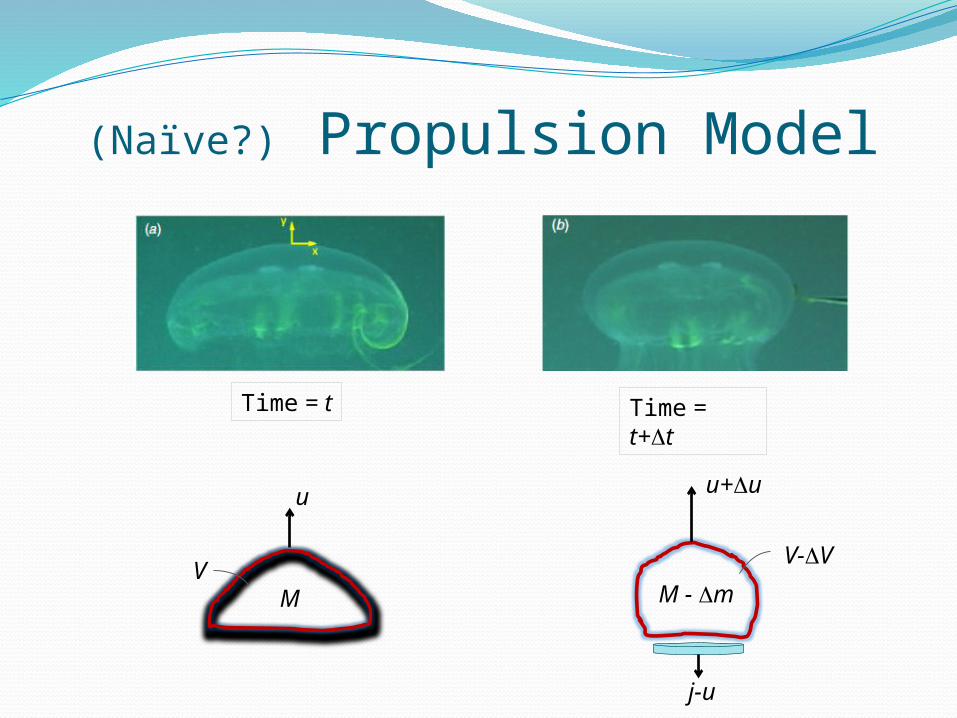
(Naïve?) Propulsion Model
j-u
Time = t Time = t+Dt
u
MV
u+Du
M - Dm
V-DV

Model v. ExperimentLittle jellyfish (prolates)
Big jellyfish (oblates)
Big !!!D
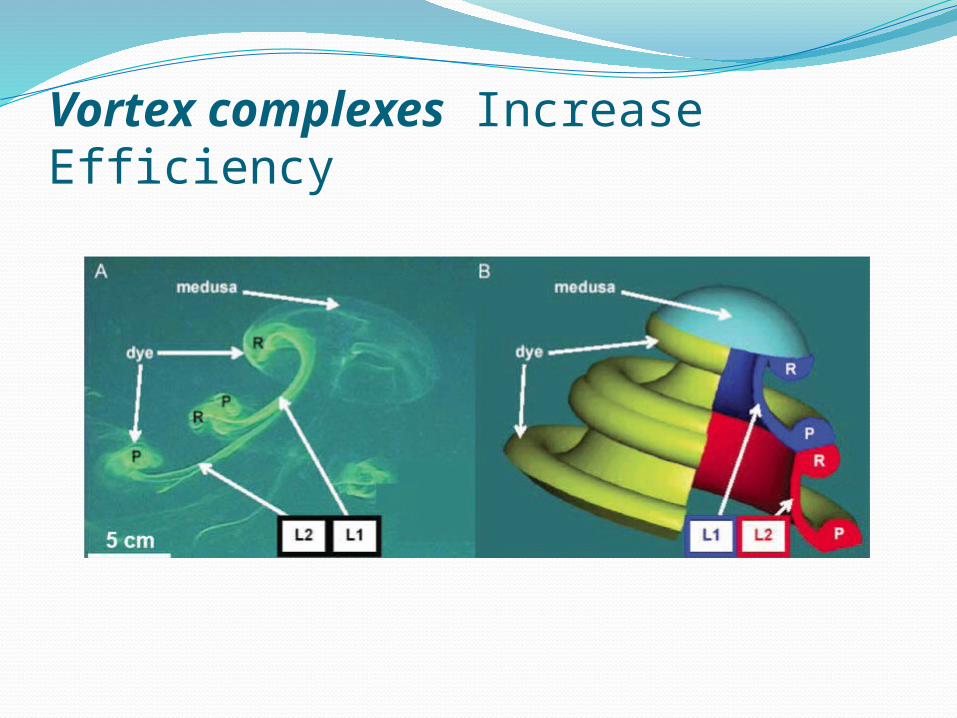
Vortex complexes Increase Efficiency

Biomimetic Robot Design
• Features to replicate?• How to do this simply?
• Bell material properties: buoyancy, elasticity• Bell geometry/deformation• Muscles/Actuation

Hard body vs. soft-body
Finite degrees of freedom (DOF) Infinite degrees of freedom (DOF)
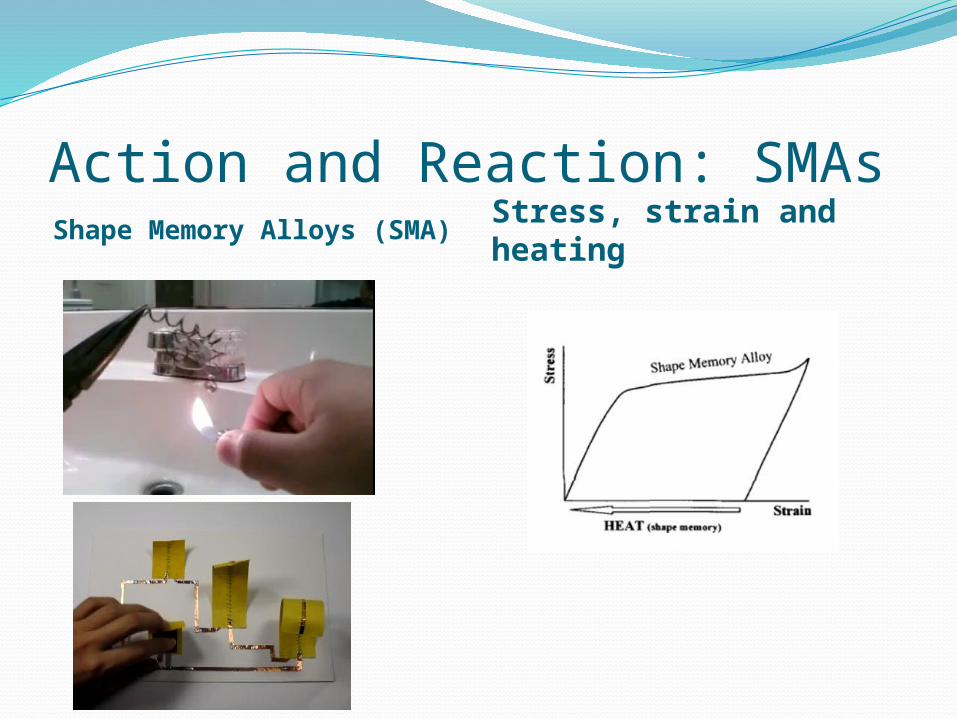
Action and Reaction: SMAsShape Memory Alloys (SMA)
Stress, strain and heating

Crystal structure phase change
Temperature induced phase change:
Martensite: soft, plastic, easily deformable state
Austenite: much harder material, rigid/difficult to deform.

Reaction: Spring steel and elastomerSMA changes length
metal does not
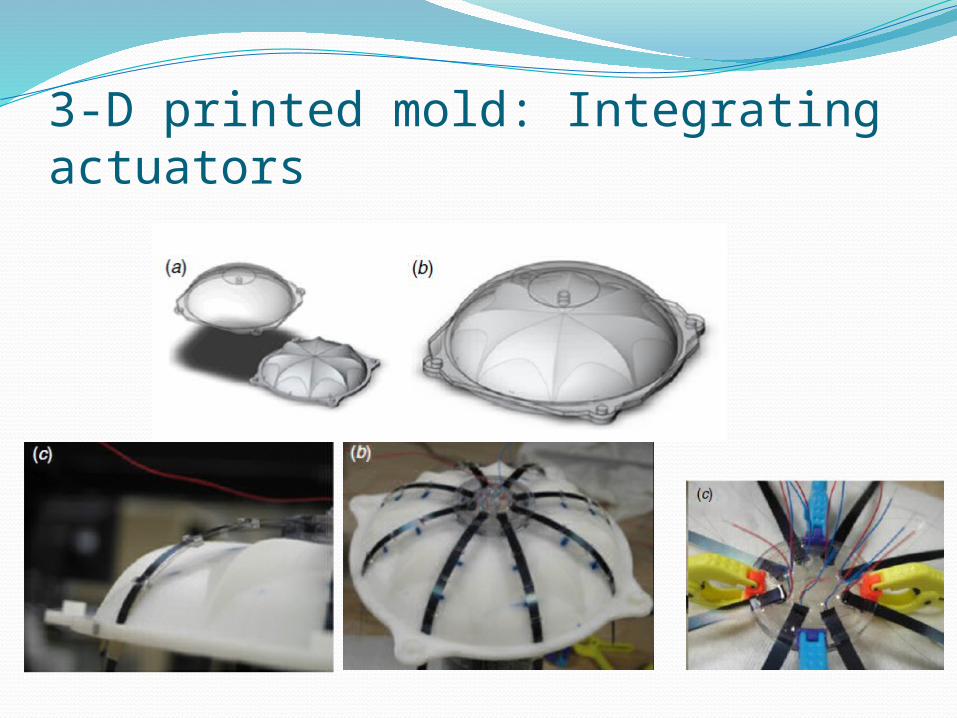
3-D printed mold: Integrating actuators

The devil in the detailsNo-flaps Flaps
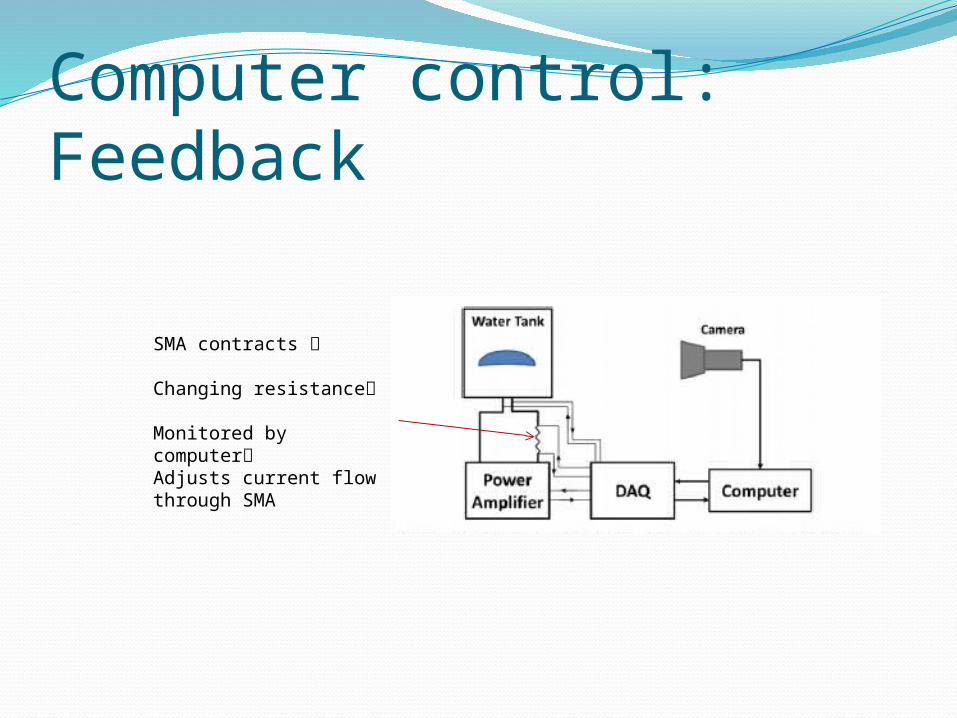
Computer control: Feedback
SMA contracts
Changing resistance
Monitored by computerAdjusts current flow through SMA

Mimic vs. Nature

Up, up, and away
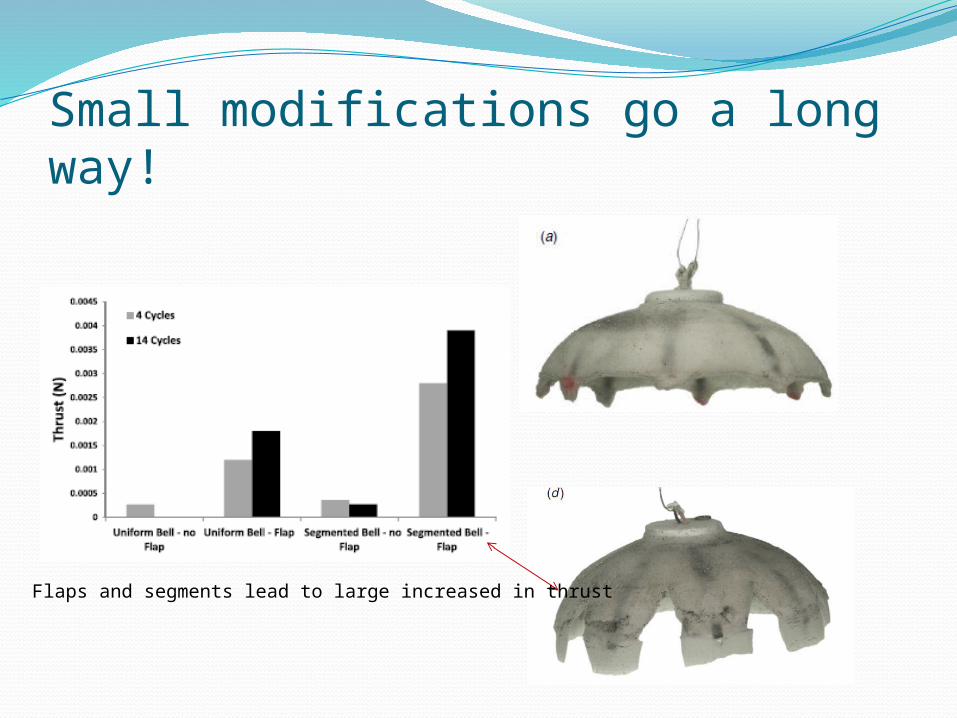
Small modifications go a long way!
Flaps and segments lead to large increased in thrust

ReferencesJellyfish Propulsion Mechanisms
S. Colin and J. Costello. Morphology, swimming performance and propulsive mode of six co-occuring hydromedusae. J. Exp Biol. 205 (2002) 427-437.
J. Dabiri et al. Flow patterns generated by oblate medusan jellyfish: field measurements and laboratory analyses. J. Exp Biol. 208 (2005) 1257-1265
Bioinspired Jellyfish Robot (Robojelly)
A. Villanueva et al. A biomimetic robotic jellyfish (Robojelly) actuated by shape memory alloy composite actuators. Bioinsp. Biomim 6 (2011) 036004
A. Villanueva et al. A bio-inspired shape memory alloy composite (BISMAC) actuator. Smart Mater. Struct. 19 (2010) 025013






























