Guns, Jellyfish, and Steel Why we should mimic jellyfish for efficient underwater propulsion

Why we should mimic jellyfish for efficient underwater propulsion.
Dec 16, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Guns, Jellyfish, and SteelWhy we should mimic jellyfish for efficient underwater
propulsion

Cyro – biomimic jellyfish robot
Guns? I thought this was bioE!
Why does a gun recoil?How is a submarine propelled?

How does a jellyfish propel itself?
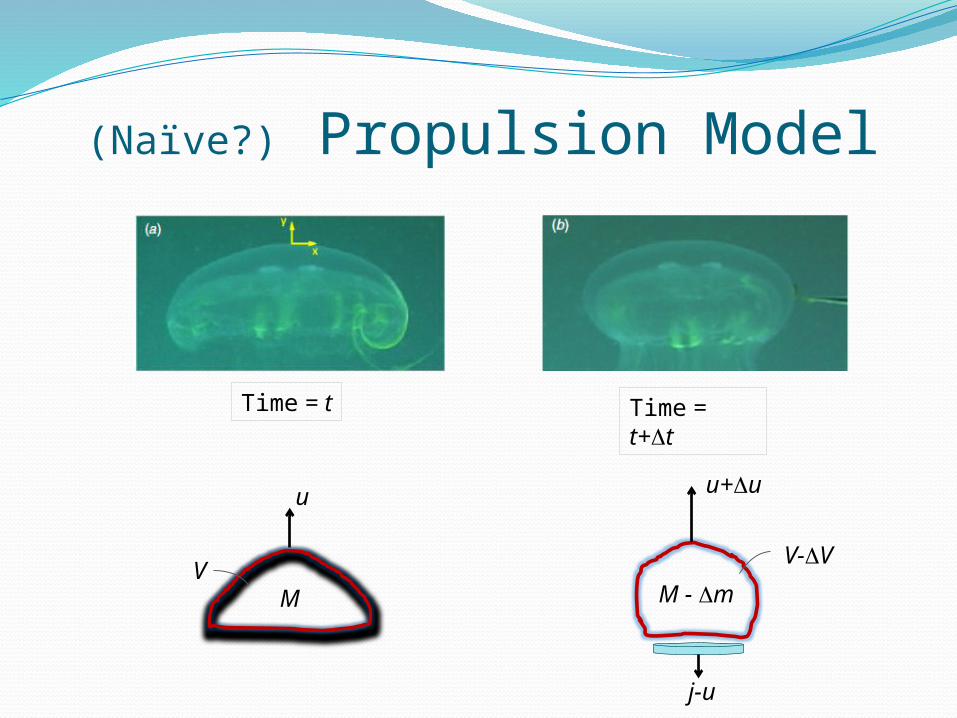
(Naïve?) Propulsion Model
j-u
Time = t Time = t+Dt
u
MV
u+Du
M - Dm
V-DV

Model v. ExperimentLittle jellyfish (prolates)
Big jellyfish (oblates)
Big !!!D
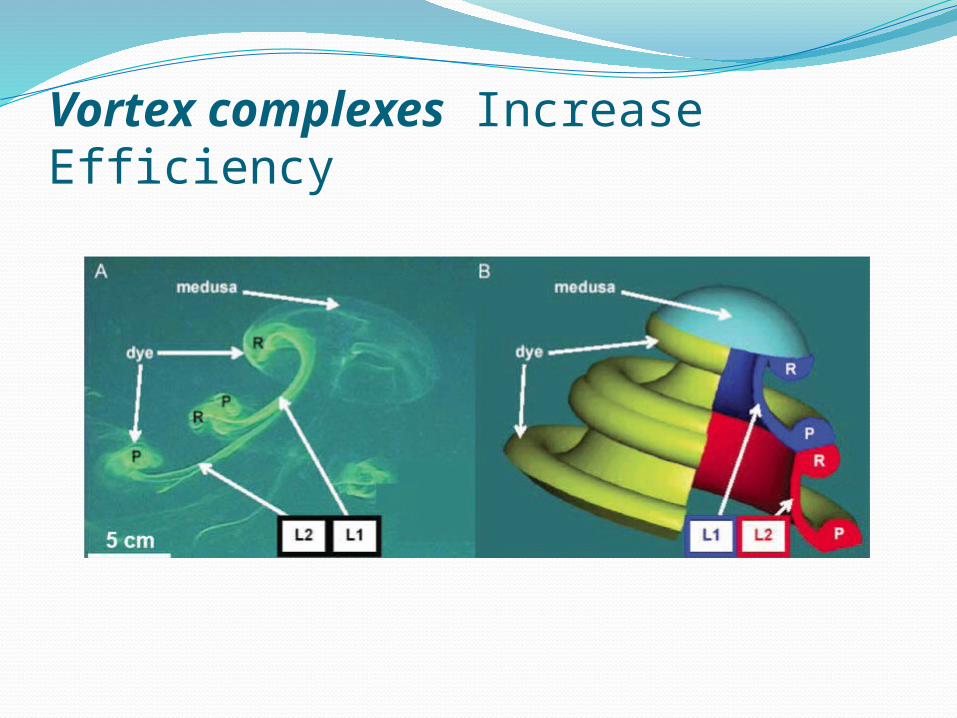
Vortex complexes Increase Efficiency

Biomimetic Robot Design
• Features to replicate?• How to do this simply?
• Bell material properties: buoyancy, elasticity• Bell geometry/deformation• Muscles/Actuation

Hard body vs. soft-body
Finite degrees of freedom (DOF) Infinite degrees of freedom (DOF)
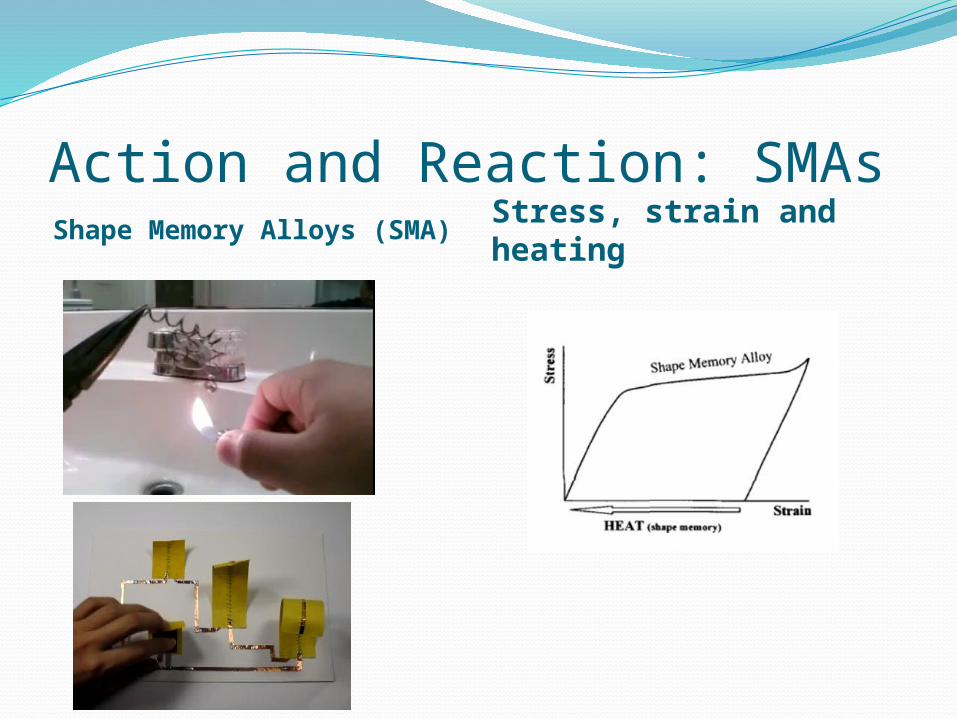
Action and Reaction: SMAsShape Memory Alloys (SMA)
Stress, strain and heating

Crystal structure phase change
Temperature induced phase change:
Martensite: soft, plastic, easily deformable state
Austenite: much harder material, rigid/difficult to deform.

Reaction: Spring steel and elastomerSMA changes length
metal does not
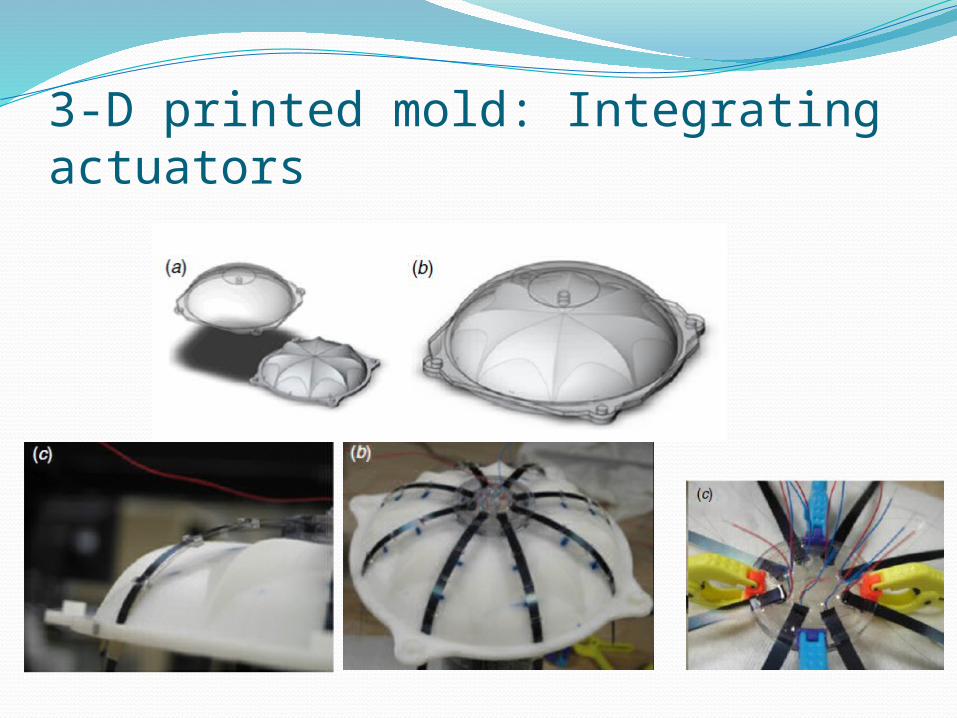
3-D printed mold: Integrating actuators

The devil in the detailsNo-flaps Flaps
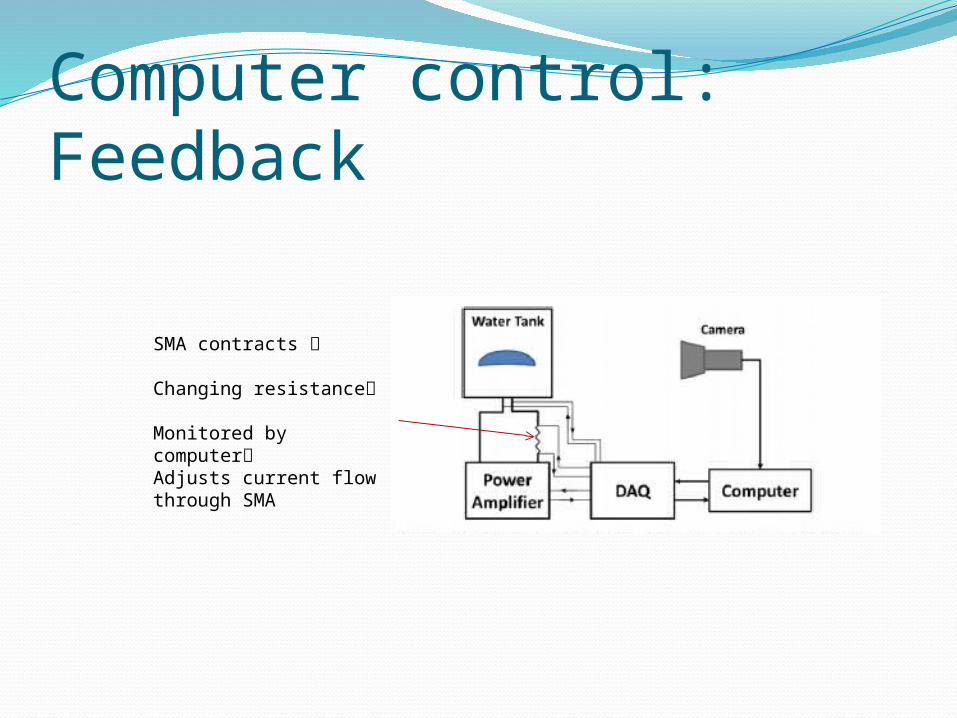
Computer control: Feedback
SMA contracts
Changing resistance
Monitored by computerAdjusts current flow through SMA

Mimic vs. Nature

Up, up, and away
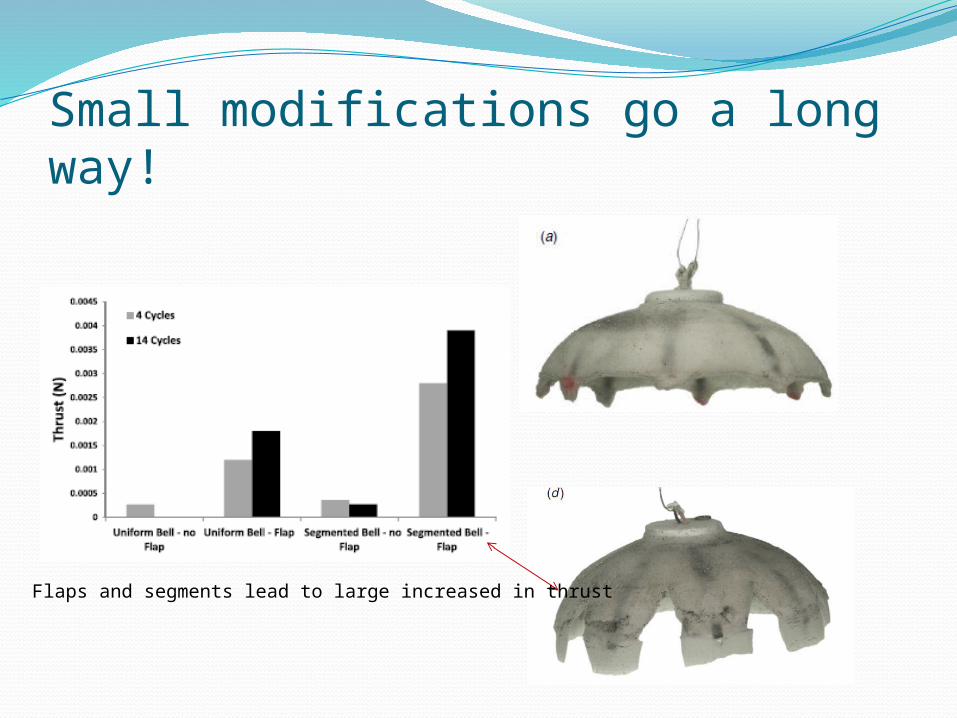
Small modifications go a long way!
Flaps and segments lead to large increased in thrust

ReferencesJellyfish Propulsion Mechanisms
S. Colin and J. Costello. Morphology, swimming performance and propulsive mode of six co-occuring hydromedusae. J. Exp Biol. 205 (2002) 427-437.
J. Dabiri et al. Flow patterns generated by oblate medusan jellyfish: field measurements and laboratory analyses. J. Exp Biol. 208 (2005) 1257-1265
Bioinspired Jellyfish Robot (Robojelly)
A. Villanueva et al. A biomimetic robotic jellyfish (Robojelly) actuated by shape memory alloy composite actuators. Bioinsp. Biomim 6 (2011) 036004
A. Villanueva et al. A bio-inspired shape memory alloy composite (BISMAC) actuator. Smart Mater. Struct. 19 (2010) 025013
Related Documents











