Normal Modes Analysis of RiverSonde Data in a
Tidal Channel
Calvin C. Teague, Donald E. BarrickCODAR Ocean Sensors, Ltd.
Mountain View, CA
David HoneggerOregon State University
Corvallis, OR

RiverSonde Description
• UHF (435 MHz, 70-cm wavelength) radar
• Bragg scattering from 35-cm wavelength waves
• Based on SeaSonde hardware
• 1 W transmit power
• MUSIC direction finding using 3-yagi antenna array
• 5–15 m range bins, 1° angle bins
• Typically installed on a river bank

AntennasCenter array used for Transmit & Receive
Side arrays used for receive only
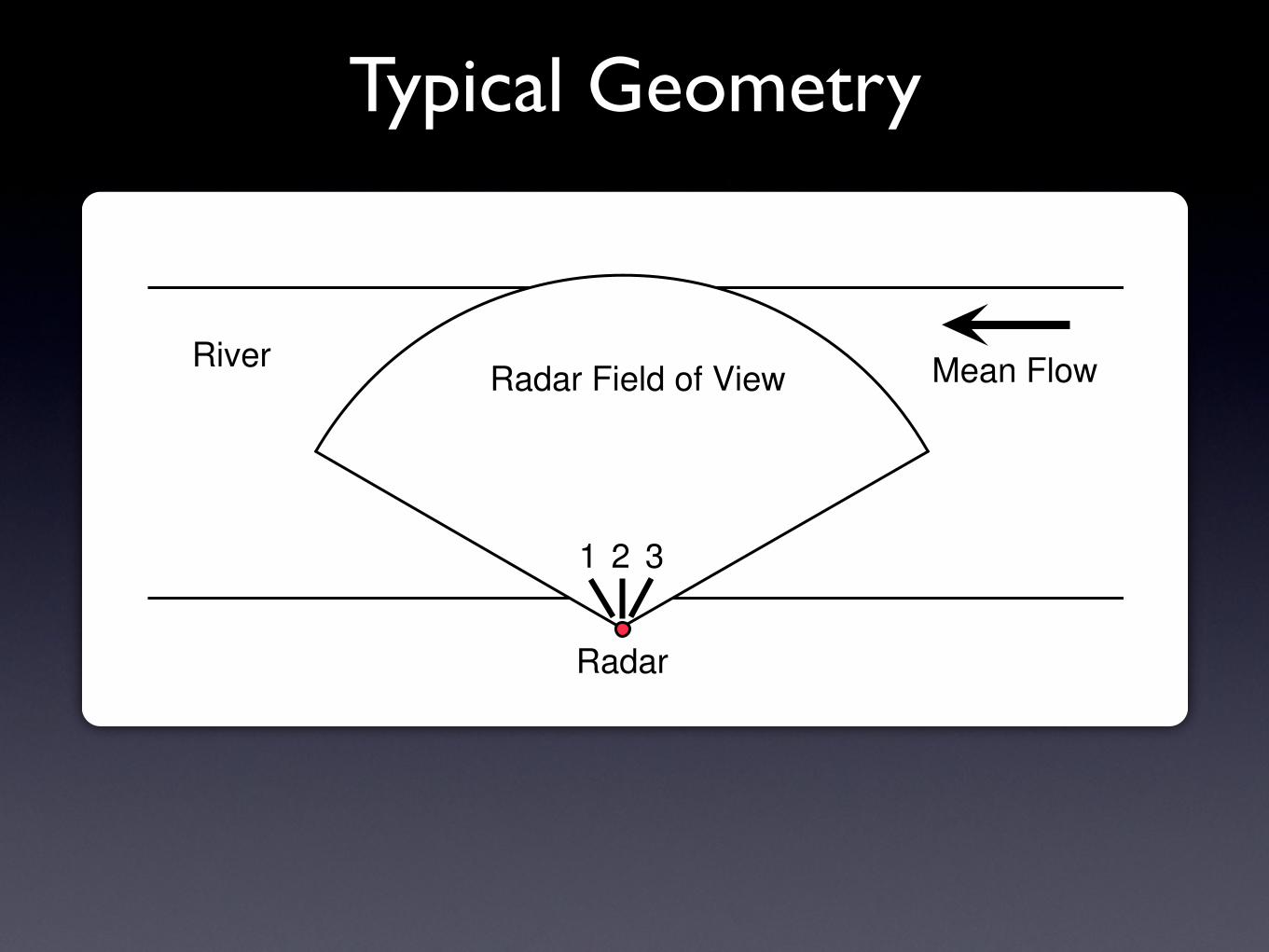
Typical Geometry
Radar Field of View Mean Flow
Radar
River
1 2 3

Newport Experiment
• CODAR student grant program
• Installed in September 2010 at Newport, Oregon
• Channel connecting Yaquina Bay to Pacific Ocean
• Tidal flow between parallel jetties

Experiment Location

Radial Vectors2010-12-07-13:00 UTC

Velocity Vector Estimation
• From a single site, find along- and cross-channel components from least-squares fit to radials
• If 2 sites are available, find full vectors by combining radial measurements from both sites
• From a single site, use Normal Modes Analysis of radial measurements to infer full vectors
• For arbitrary boundary, numerical solution required
• For rectangular boundary, closed-form solution possible
• Useful for dynamic flow conditions like tidal reversals

Normal Modes Analysis
• Assume water incompressible
• Express horizontal flow in terms of velocity potentials and stream func-
tions
• Boundary conditions
– Zero normal flow at banks
– No impedance to tangential flow at banks
– Periodic boundary at ends of analysis region
• Horizontal surface velocity vector−→U
−→U = ∇× [z(−Ψ) +∇× (zΦ)]
where z is the vertical unit vector, Ψ is the stream function, and Φ is
the velocity potential
• Allow up to 20 modes across river, only 2 along river
• Closed-form solutions in terms of sines and cosines

Homogeneous Equations• Stream function satisfying Dirichlet condition at bank
∇2ψn + νnψn = 0, where ψn|Γ = 0�uD
n , vDn
�=
�−∂ψn
∂y,
∂ψn
∂x
�
where ψn is the n-th eigenfunction of the stream function Ψ, νn is thecorresponding n-th eigenvalue and uD
n and vDn are the velocity compo-
nents in the x and y directions, respectively.
• Velocity function satisfying Neumann condition at bank
∇2φn + µnφn = 0, where (λ ·∇φn)���Γ
=∂φn
∂λ
����Γ
= 0
[uNn , vN
n ] =
�∂φn
∂x,
∂φn
∂y
�
where φn is the n-th eigenfunction of the velocity potential Φ, µn is thecorresponding n-th eigenvalue and λ is the direction perpendicular tothe boundary.

Normal Modes SolutionsVelocity potential modes with a periodic boundary at x = ±L/2 and bank at y = ±W/2
φn(x, y) =
cos(j2πx/L) cos(mπy/W )for j = 0,1,2,3, . . . ; m = 0,2,4,6, . . .
cos(j2πx/L) sin(mπy/W )for j = 0,1,2,3, . . . ; m = 1,3,5,7, . . .
sin(j2πx/L) cos(mπy/W )for j = 0,1,2,3, . . . ; m = 0,2,4,6, . . .
sin(j2πx/L) sin(mπy/W )for j = 0,1,2,3, . . . ; m = 1,3,5,7, . . .
Corresponding stream modes
ψn(x, y) =
cos(j2πx/L) cos(mπy/W )for j = 0,1,2,3, . . . ; m = 1,3,5,7, . . .
cos(j2πx/L) sin(mπy/W )for j = 0,1,2,3, . . . ; m = 0,2,4,6, . . .
sin(j2πx/L) cos(mπy/W )for j = 0,1,2,3, . . . ; m = 1,3,5,7, . . .
sin(j2πx/L) sin(mπy/W )for j = 0,1,2,3, . . . ; m = 0,2,4,6, . . .

Velocity Mode Examples 1
IfBdoPlotModes, BlockB8n, x0, y0, L, W<, L = x2 - x1; W = y2 - y1; x0 =x1 + x2
2; y0 =
y1 + y2
2;
For@n = 1, n § Length@uPhiD, n++, title = "n = " <> ToString@nD; title = modeIDPnT;plt = HVectorPlot@8uPhiPnT, vPhiPnT<, 8x, x1, x2<, 8y, y1, y2<, Frame Ø True,
PlotLabel Ø title, AspectRatio Ø Automatic, DisplayFunction Ø IdentityDL;Print@Show@plt, Graphics@8RGBColor@1, 0, 0D, Disk@80, 0<, 82, 2<D<D,
PlotRange Ø 88x1 - 10 - 0.01`, x2 + 10<, 8yp1, yp2<<,
ImageSize Ø modesPlotWidth, DisplayFunction Ø $DisplayFunctionDDD;F;F;
-400 -200 0 200 4000
50
100
150
200
250
300
35081, 0, -1, Null, Null<
-400 -200 0 200 4000
50
100
150
200
250
300
35082, 0, 0, Null, Null<
-400 -200 0 200 4000
50
100
150
200
250
300
35083, 0, 1, Null, Null<
-400 -200 0 200 4000
50
100
150
200
250
300
35084, 1, -1, Null, Null<
-400 -200 0 200 4000
50
100
150
200
250
300
35085, 1, 0, Null, Null<
-400 -200 0 200 4000
50
100
150
200
250
300
35086, 1, 1, Null, Null<
-400 -200 0 200 4000
50
100
150
200
250
300
35087, 2, -1, Null, Null<
2 FitModes6-ModePlots.nb
j = 1m = 0
j = 1m = 1

-400 -200 0 200 4000
50
100
150
200
250
300
35084, 1, -1, Null, Null<
-400 -200 0 200 4000
50
100
150
200
250
300
35085, 1, 0, Null, Null<
-400 -200 0 200 4000
50
100
150
200
250
300
35086, 1, 1, Null, Null<
-400 -200 0 200 4000
50
100
150
200
250
300
35087, 2, -1, Null, Null<
2 FitModes6-ModePlots.nb
-400 -200 0 200 4000
50
100
150
200
250
300
35088, 2, 0, Null, Null<
-400 -200 0 200 4000
50
100
150
200
250
300
35089, 2, 1, Null, Null<
-400 -200 0 200 4000
50
100
150
200
250
300
350810, 3, -1, Null, Null<
-400 -200 0 200 4000
50
100
150
200
250
300
350811, 3, 0, Null, Null<
FitModes6-ModePlots.nb 3
Velocity Mode Examples 2
j = 0m = 1
j = 0m = 2

Velocity Mode Examples 3
IfBdoPlotModes,
BlockB8n, x0, y0, L, W<, L = x2 - x1; W = y2 - y1; x0 =x1 + x2
2; y0 =
y1 + y2
2; For@n = 1,
n § Length@uPsiD, n++, title = "n = " <> ToString@nD; title = modeIDPLength@uPhiD + nT;plt = HVectorPlot@8uPsiPnT, vPsiPnT<, 8x, x1, x2<, 8y, y1, y2<, Frame Ø True,
PlotLabel Ø title, AspectRatio Ø Automatic, DisplayFunction Ø IdentityDL;Print@Show@plt, Graphics@8RGBColor@1, 0, 0D, Disk@80, 0<, 82, 2<D<D,
PlotRange Ø 88x1 - 10 - 0.01`, x2 + 10<, 8yp1, yp2<<,
ImageSize Ø modesPlotWidth, DisplayFunction Ø $DisplayFunctionDDD;F;F;
-400 -200 0 200 4000
50
100
150
200
250
300
350864, Null, Null, 1, 0<
-400 -200 0 200 4000
50
100
150
200
250
300
350865, Null, Null, 2, 0<
FitModes6-ModePlots.nb 17
IfBdoPlotModes,
BlockB8n, x0, y0, L, W<, L = x2 - x1; W = y2 - y1; x0 =x1 + x2
2; y0 =
y1 + y2
2; For@n = 1,
n § Length@uPsiD, n++, title = "n = " <> ToString@nD; title = modeIDPLength@uPhiD + nT;plt = HVectorPlot@8uPsiPnT, vPsiPnT<, 8x, x1, x2<, 8y, y1, y2<, Frame Ø True,
PlotLabel Ø title, AspectRatio Ø Automatic, DisplayFunction Ø IdentityDL;Print@Show@plt, Graphics@8RGBColor@1, 0, 0D, Disk@80, 0<, 82, 2<D<D,
PlotRange Ø 88x1 - 10 - 0.01`, x2 + 10<, 8yp1, yp2<<,
ImageSize Ø modesPlotWidth, DisplayFunction Ø $DisplayFunctionDDD;F;F;
-400 -200 0 200 4000
50
100
150
200
250
300
350864, Null, Null, 1, 0<
-400 -200 0 200 4000
50
100
150
200
250
300
350865, Null, Null, 2, 0<
FitModes6-ModePlots.nb 17
j = 0m = 1
j = 0m = 2

Mode Coefficients Determination
• Evaluate model in terms of unknown mode coefficients at each point where radar data are available
• At each point, equate sum of radial components of model to radial radar measurement
• Repeat over all available radar measurements
• Solve overdetermined set of equations for mode coefficients (~5000 equations in ~50 unknowns) using least-squares
• Allow up to 20 modes across river for along-river component (mmax), only 2 along river for both along- and cross-river components (jmax)

Streamline Examples
!200 !100 0 100 20050
100
150
200
250
300
x !m"
y!m"
NWPT_2010_12_07_0600
0.0
0.5
1.0
1.5
2.0
m#s
!200 !100 0 100 20050
100
150
200
250
300
x !m"
y!m"
NWPT_2010_12_07_0945
0.0
0.5
1.0
1.5
2.0
m#s
!200 !100 0 100 20050
100
150
200
250
300
x !m"
y!m"
NWPT_2010_12_07_1300
0.0
0.5
1.0
1.5
2.0
m#s
!200 !100 0 100 20050
100
150
200
250
300
x !m"
y!m"
NWPT_2010_12_07_1530
0.0
0.5
1.0
1.5
2.0
m#s

Mode Limits
u: jmax = 1, mmax = 5v: jmax = 0, mmax = 2
!200 !100 0 100 20050
100
150
200
250
300
x !m"
y!m"
NWPT_2010_12_07_1530
0.0
0.5
1.0
1.5
2.0
m#s
!200 !100 0 100 20050
100
150
200
250
300
x !m"
y!m"
NWPT_2010_12_07_1530
0.0
0.5
1.0
1.5
2.0
m#s u: jmax = 1, mmax = 20
v: jmax = 0, mmax = 2

Lagrangian Particle Trajectories
• Compute velocity vectors at 5-minute intervals
• Seed study area with 100 particles randomly placed every 2 minutes
• Integrate particle velocity in 10-second steps
• Display 10 locations of particles with lighter color for older positions
• Movie covers 2.5 hours around a tidal reversal

Particle Trajectory Example
!200 !100 0 100 20050
100
150
200
250
300
350
x !m"
y!m"
2010!12!07 08:30:00 !0000
Summary• For an arbitrary boundary, Normal Modes solution must be
found numerically
• For the special case of a rectangular boundary, with no normal flow across banks and periodic continuation at open boundaries, a closed-form solution can be found as a series of products of sines and cosines
• Least-squares fit of radial components of Normal Modes to radar radial velocity vectors gives coefficients
• Lagrangian visualization of particle trajectories may be useful in dynamic conditions like tidal reversals
• Future studies
• Compare this 2D fitting to 1D radial data with ADCP or other in-situ measurements, especially during flow reversals
• Determine how many modes are meaningful








![H20youryou[2] · 2020. 9. 1. · 65 pdf pdf xml xsd jpgis pdf ( ) pdf ( ) txt pdf jmp2.0 pdf xml xsd jpgis pdf ( ) pdf pdf ( ) pdf ( ) txt pdf pdf jmp2.0 jmp2.0 pdf xml xsd](https://static.cupdf.com/doc/110x72/60af39aebf2201127e590ef7/h20youryou2-2020-9-1-65-pdf-pdf-xml-xsd-jpgis-pdf-pdf-txt-pdf-jmp20.jpg)