TEORIJA KRETANJA DRUMSKIH VOZILA
Univerzitet u Novom Sadu
FAKULTET TEHNIČKIH NAUKA
- PREDAVANJA -
Doc. dr Boris Stojić, 2018.
FTN Novi Sad – Departman za mehanizaciju i konstrukciono mašinstvo
Katedra za motore i vozila
- PREDAVANJA -

Sile koje deluju na voziloSile koje deluju na vozilo
Teorija kretanja drumskih vozilaTeorija kretanja drumskih vozila
Sile koje deluju na voziloSile koje deluju na vozilo

Sile koje deluju na vozilo
• Gravitaciona sila
• Aerodinamičke sile
• Interakcija točka i podloge
Specifični i kompleksni oblici ponašanja pneumatika
Pregled sila
– Specifični i kompleksni oblici ponašanja pneumatika
– Bočno povođenje – specijalna osobina pneumatika
– Uticaj opterećenja i pritiska

Sile koje deluju na vozilo
• Prouzrokuje osovinske reakcije
• Otpor kretanja na uzbrdici (razlaganje vektora)
Gravitaciona sila – težina vozila
l
hCM
GP G
α
α(razlaganje vektora)lP
GP
GZ
G
lAΣMA = 0 ⇒ GP·l = G·cosα·lZ – G·sinα·hCM
ΣZi = 0 ⇒ Wf + Wr = W·cosα
α = 0:
αα sincos ⋅⋅−⋅⋅= Gl
hG
l
lG CMZ
P
α
lZ
αα sincos ⋅⋅+⋅⋅= Gl
hG
l
lG CMP
Z
Gl
lG Z
P ⋅=
Gl
lG P
Z ⋅=

Sile koje deluju na vozilo
Aerodinamičke sile
• Rezultujuća aerodinamička sila FA je zbir / integral sila pritiska i viskoznog trenja na elementarnim površinama vozila
• U opštem slučaju ima komponente duž sve tri ose koordinatnog sistema: AzAyAxA FFFF
rrrr++=
racingcardynamics.com
FAxFAz
FAy
Sile koje deluju na vozilo
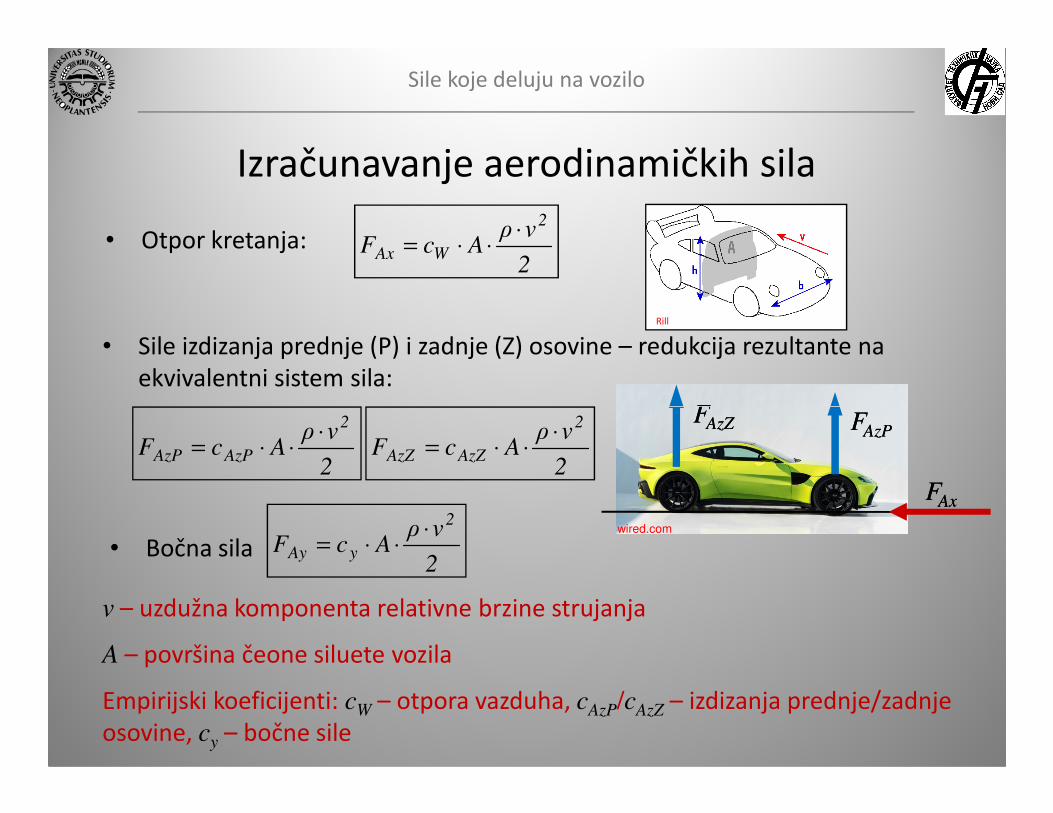
• Otpor kretanja:
Izračunavanje aerodinamičkih sila
2
vρAcF
2
WAx
⋅⋅⋅=
Rill
• Sile izdizanja prednje (P) i zadnje (Z) osovine – redukcija rezultante na ekvivalentni sistem sila:
FFFF
• Bočna sila
2
vρAcF
2
AzPAzP
⋅⋅⋅=
2
vρAcF
2
AzZAzZ
⋅⋅⋅=
FFAzPAzP
FFAxAx
FFAzZAzZ
2
vρAcF
2
yAy
⋅⋅⋅=
v – uzdužna komponenta relativne brzine strujanja
A – površina čeone siluete vozila
Empirijski koeficijenti: cW – otpora vazduha, cAzP/cAzZ – izdizanja prednje/zadnje osovine, cy – bočne sile
wired.com
Sile koje deluju na vozilo
• Radijusi točka rT
Ponašanje pneumatika: različiti radijusi
• Slobodni (nedeformisani) radiujus: rT0
• Statički radijus: rTSt = rT0 – ∆r → može da se izmeri geometrijski (∆r – radijalni ugib pneumatika duž vertikalne ose)
• Dinamički radijus: rTDin = OT / (2π) → određuje se ispitivanjem točka u kotrljanju (OT – obim kotrljanja točka)
• U opštem slučaju je rTDin ≠ rTSt! → trenutni centar se u opštem slučaju ne podudara sa
sredinom kontaktne površine
• Statički radijus predstavlja krak tangencijalne reakcije podloge u odnosu na centar točka.
• Dinamički radijus povezuje obrtno (ω) sa translatornim (v) kretanjem točka.
Za dalji rad usvaja se radi pojednostavljenja: rTSt ≈ rTDin = rT
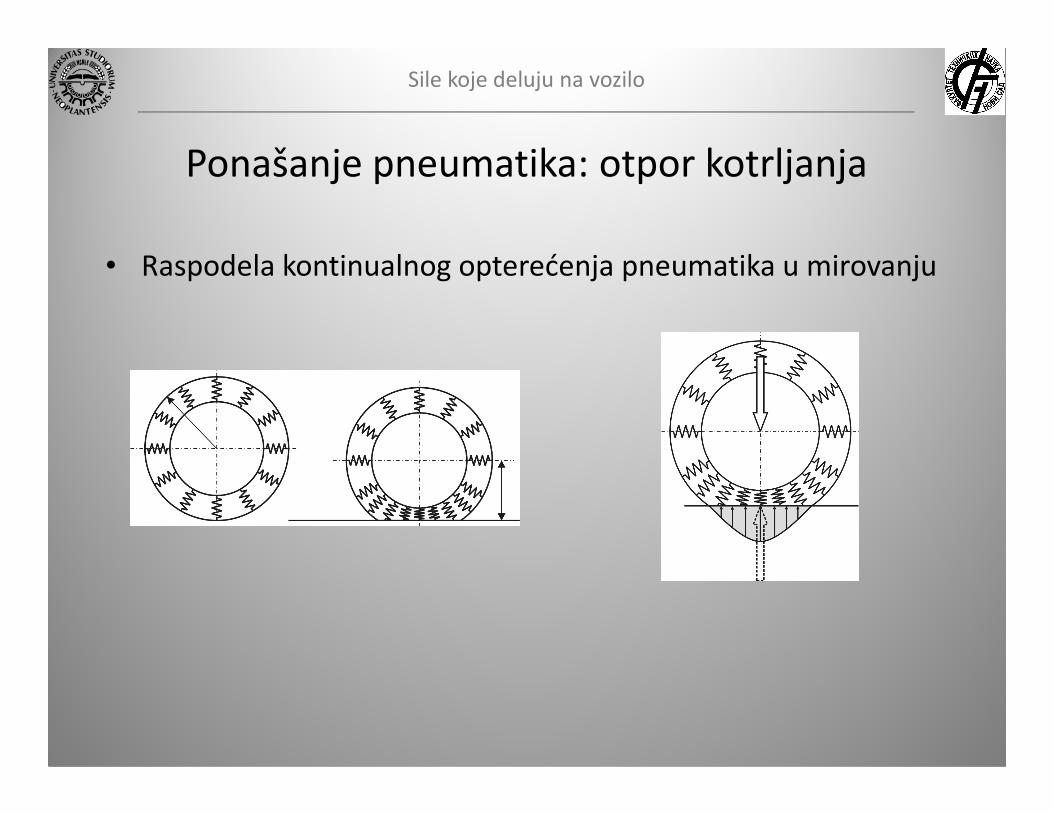
Sile koje deluju na vozilo
• Raspodela kontinualnog opterećenja pneumatika u mirovanju
Ponašanje pneumatika: otpor kotrljanja
Sile koje deluju na vozilo
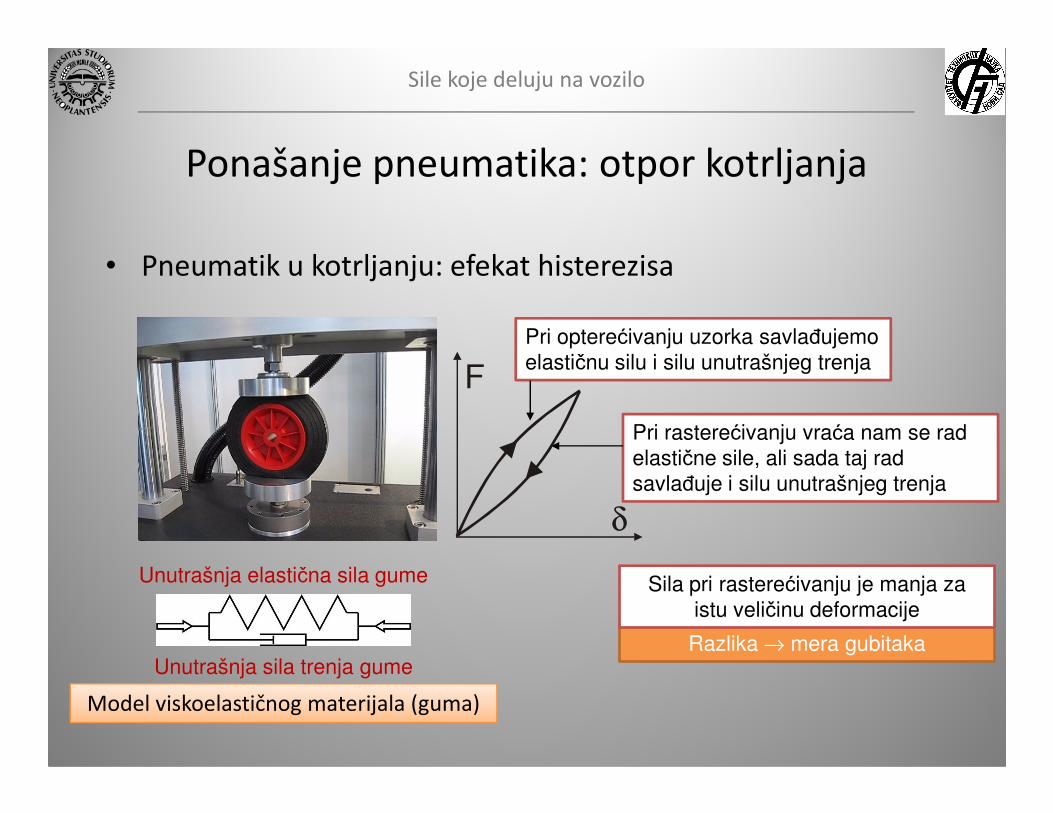
• Pneumatik u kotrljanju: efekat histerezisa
Ponašanje pneumatika: otpor kotrljanja
Pri opterećivanju uzorka savlađujemo elastičnu silu i silu unutrašnjeg trenjaF
Unutrašnja elastična sila gume
Unutrašnja sila trenja gume
Model viskoelastičnog materijala (guma)
Pri rasterećivanju vraća nam se rad elastične sile, ali sada taj rad savlađuje i silu unutrašnjeg trenja
Razlika → mera gubitaka
Sila pri rasterećivanju je manja za istu veličinu deformacije
δδ

Sile koje deluju na vozilo
• Pneumatik u kotrljanju: efekat histerezisa
Ponašanje pneumatika: otpor kotrljanja
Smer kotrljanja
Nailazna strana → opterećivanje → veće elementarne sile
Promena raspodele –kontinualno opterećenje postaje asimetrično
Izlazna strana → rasterećivanje → manje elementarne sile ⇒
Sile koje deluju na vozilo
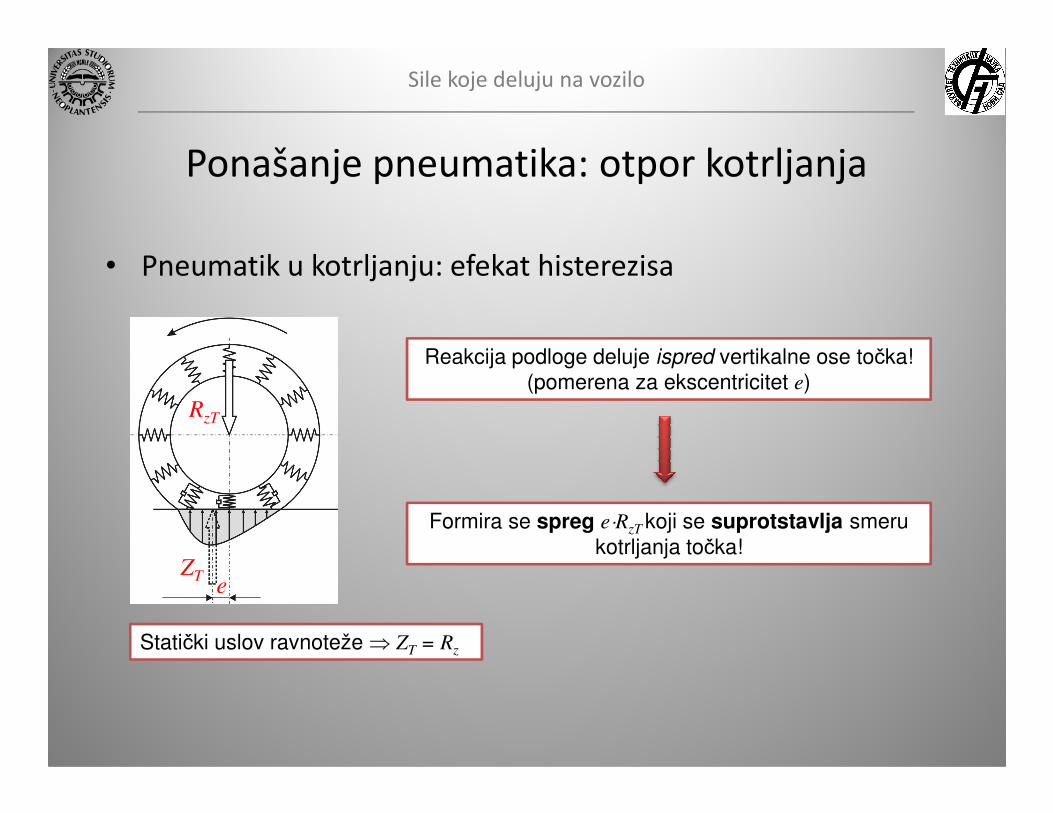
• Pneumatik u kotrljanju: efekat histerezisa
Ponašanje pneumatika: otpor kotrljanja
R
Reakcija podloge deluje ispred vertikalne ose točka!(pomerena za ekscentricitet e)
e
RzT
ZT
Formira se spreg e⋅RzT koji se suprotstavlja smeru kotrljanja točka!
Statički uslov ravnoteže ⇒ ZT = Rz

Sile koje deluju na vozilo
• Tangencijalna reakcija XT slobodnog točka pri ravnomernom kotrljanju (v, ω = const)
Ponašanje pneumatika: otpor kotrljanja
ω • Da bi se savladao otpor kotrljanja, na točak se mora delovati aktivnom silom RxT (reakcija
e
RzT
ZT XT
rT
RxT
se mora delovati aktivnom silom RxT (reakcija vozila – uzdužna sila u ležaju točka )
• Kao reakcija podloge u uzdužnom pravcu javlja se tangencijalna sila XT
• Statički uslov ravnoteže ⇒ XT = RxT
• Spreg sila XT i Rx deluje u smeru kotrljanja i uravnotežava spreg sila ZT i Rz ⇒ točak se kotrlja ustaljeno
• Sila XT deluje suprotno od smera kretanja ⇒predstavlja silu otpora kotrljanja

Sile koje deluju na vozilo
• Tangencijalna reakcija XT slobodnog točka pri ravnomernom kotrljanju (v, ω = const)
Ponašanje pneumatika: otpor kotrljanja
ω Uslov sume momenata za tačku A:
e
RzT
ZT XT
rT
RxT
→→→→→→→→ koeficijent otpora kotrljanjakoeficijent otpora kotrljanja
ΣMA = 0 ⇒ e⋅RzT = rT⋅XT
zT
T
T Rr
eX ⋅=
fr
e
T
=
Uvodi se veličina:

Sile koje deluju na vozilo
• Karakter promene koeficijenta otpora kotrljanja sa brzinom
Ponašanje pneumatika: otpor kotrljanja
Izvor: Genta / Morello
∼∼ 0,010,01

Sile koje deluju na vozilo
• Uticaj brzine i pritiska na otpor kotrljanja
Ponašanje pneumatika: otpor kotrljanja
∼∼ 0,010,01
Izvor: Genta / Morello
Sile koje deluju na vozilo
• Tangencijalna reakcija XT slobodnog točka pri ravnomernom kotrljanju (v, ω = const)
Ponašanje pneumatika: tangencijalna reakcija
- tangencijalna reakcija slobodnog točka koji se kotrlja ustaljenom brzinomXT = f⋅RzT
Takođe se uvodi se računska veličina:
FfT = f⋅RzT- računska sila otpora kotrljanja točka
Kod slobodnog točka koji se kotrlja ustaljenom brzinom, tangencijalna reakcija je jednaka računskoj sili otpora kotrljanja.

Sile koje deluju na vozilo
• Tangencijalna reakcija XT POGONSKOG točka pri ravnomernom kotrljanju
Ponašanje pneumatika: tangencijalna reakcija
ΣFZi = 0⇒ ZT = RzT
ΣFXi = 0⇒ XT = RxT
ΣMA = 0⇒ MT = e⋅ZT + rT⋅RxT rTΣMA = 0⇒ MT = e⋅ZT + rT⋅RxT rT
POG
T
POG Fr
M≡ → definicija
zT
TT
POGT R
r
e
r
MX ⋅−= ⇒ XT = FPOG - FfT
FPOG – pogonska (obimna, vučna) sila na točku→→→→ fiktivna (tj. računska) veličina!

Sile koje deluju na vozilo
• Tangencijalna reakcija XT POGONSKOG točka pri ravnomernom kotrljanju
Ponašanje pneumatika: tangencijalna reakcija
XT = FPOG - FfT
zT
TT
POGT R
r
e
r
MX ⋅−=
Kod pogonskog točka koji se kotrlja ustaljenom brzinom, tangencijalna reakcija je jednaka pogonskoj sili umanjenoj za računsku silu otpora kotrljanja.

Sile koje deluju na vozilo
• Tangencijalna reakcija XT KOČENOG točka pri ravnomernom kotrljanju
Ponašanje pneumatika: tangencijalna reakcija
ΣFZi = 0⇒ ZT = RzT
ΣFXi = 0⇒ XT = RxT
ΣMA = 0⇒ MK = - e⋅ZT + rT⋅RxT /rTΣMA = 0⇒ MK = - e⋅ZT + rT⋅RxT /rT
K
T
K Fr
M≡ → definicija
zT
TT
KT R
r
e
r
MX ⋅+= ⇒ XT = FK + FfT
FK – kočna sila na točku→→→→ fiktivna (tj. računska) veličina!

Sile koje deluju na vozilo
• Tangencijalna reakcija XT KOČENOG točka pri ravnomernom kotrljanju
Ponašanje pneumatika: tangencijalna reakcija
XT = FK + FfT
zT
TT
KT R
r
e
r
MX ⋅+=
Kod kočenog točka koji se kotrlja ustaljenom brzinom, tangencijalna reakcija je jednaka pogonskoj sili uvećanoj za računsku silu otpora kotrljanja.

Sile koje deluju na vozilo
• Uticaj ugaonog ubrzanja/usporenja na tangencijalnu reakciju točka XT
Ponašanje pneumatika: tangencijalna reakcija
POGTxTTT MZeRrωJ +⋅−⋅−=⋅ &
Iz jednačina ravanskog kretanja točka sledi:
POGTxTTT
ZT = RzT, usvaja se XT ≈ RxT
ω&⋅−⋅−=T
TzT
TT
POGT
r
JR
r
e
r
MX
ω&⋅−−=T
TfTPOGT
r
JFFX
Zaključak: deo pogonskog momenta saopštenog točku se “troši” na savlađivanje MOMENTA
INERCIJE tj. na ubrzanje obrtnih masa. Analogno važi i za slučaj pogonskog točka.

Sile koje deluju na vozilo
Ponašanje pneumatika: mehanizam trenja gume1. komponenta: molekularna adhezijaSila međusobnog privlačenja molekula različitih materijala
2. komponenta: histerezis (razlikovati od mehanizma otpora kotrljanja!)(razlikovati od mehanizma otpora kotrljanja!)Sile pri nailasku na neravninu su zbog unutrašnjeg trenja veće nego pri silasku sa neravnine – rezultujuća reakcija podloge je usmerena suprotno od smera
Dominantna na suvoj podlozi
Dolazi do deformacije i “zaklinjavanja” – suprotstavljanje unutrašnjeg trenja u materijalu (gumi) deformacijama pri relativnom klizanju
sa neravnine – rezultujuća reakcija podloge je usmerena suprotno od smera relativnog klizanja
Izvor: P. Haney: The Racing & High-Performance Tire
Dominantna na vlažnoj podlozi
Sile koje deluju na vozilo
Ponašanje pneumatika: mehanizam trenja gume
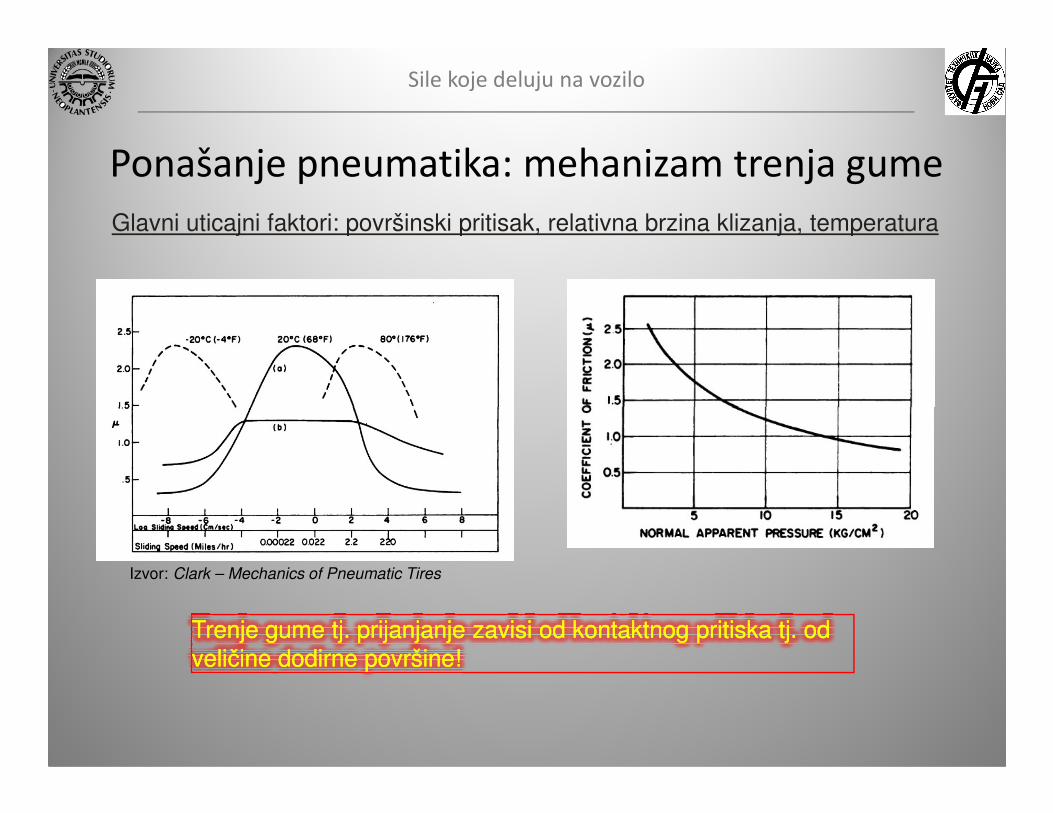
Glavni uticajni faktori: površinski pritisak, relativna brzina klizanja, temperatura
Izvor: Clark – Mechanics of Pneumatic Tires
Trenje gume tj. prijanjanje zavisi od kontaktnog pritiska tj. od Trenje gume tj. prijanjanje zavisi od kontaktnog pritiska tj. od veličine dodirne površine!veličine dodirne površine!

Sile koje deluju na vozilo
Ponašanje pneumatika: mehanizam trenja gume
Glavni uticajni faktori: površinski pritisak, relativna brzina klizanja, temperatura
Poređenje trenja gume i Kulonovog trenjaPoređenje trenja gume i Kulonovog trenja
Izvor: Lokale Effekte der Reibung zwischen Pkw-Reifen und Fahrbahn, disertacija, Markus Fach 1999 (prema: Meyer und Kummer [84])
Guma
Kulonovo trenje

Sile koje deluju na vozilo
Ponašanje pneumatika: mehanizam trenja gume
Koeficijent trenja gume
Izvor: Experimentelle und theoretische Untersuchungen zur Gummireibung an Profilklötzen und Dichtungen, disertacija, Markus Lindner 2005.
Na mokrom asfaltu Na suvom staklu
Sile koje deluju na vozilo
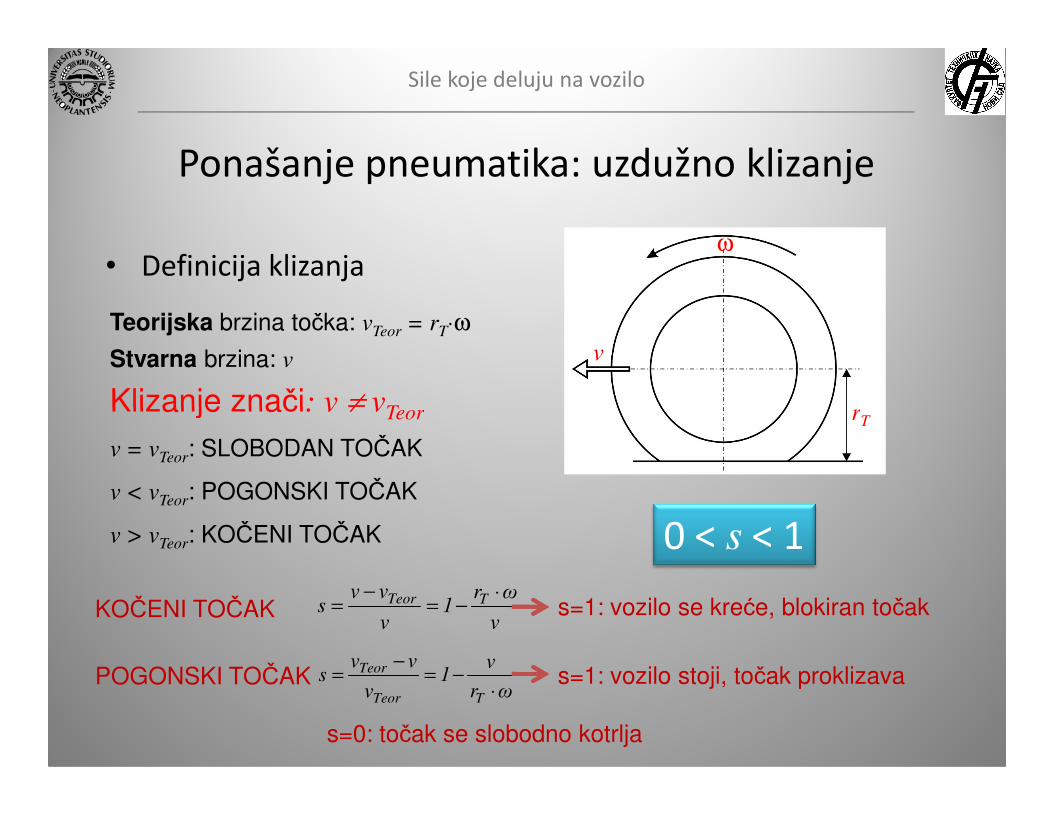
• Definicija klizanja
Ponašanje pneumatika: uzdužno klizanje
Teorijska brzina točka: vTeor = rT⋅ωStvarna brzina: v
Klizanje znači: v ≠ vTeor r
v
ω
Klizanje znači: v ≠ vTeor
v = vTeor: SLOBODAN TOČAK
v < vTeor: POGONSKI TOČAK
v > vTeor: KOČENI TOČAK
rT
v
ωr1
v
vvs TTeor ⋅
−=−
=
ωr
v1
v
vvs
TTeor
Teor
⋅−=
−=
KOČENI TOČAK
POGONSKI TOČAK
s=1: vozilo se kreće, blokiran točak
s=1: vozilo stoji, točak proklizava
s=0: točak se slobodno kotrlja
0 < s < 1

Sile koje deluju na vozilo
• Definicija klizanja
Ponašanje pneumatika: uzdužno klizanje
Kruti točak: samo za geometrijsku interpretaciju pojmova!
SLOBODAN TOČAK KOČENJE POGON
vs=0 vs vs
� Stvarna situacija: izražena elastičnost pneumatika, mehanizam klizanja značajno složeniji!
Sile koje deluju na vozilo
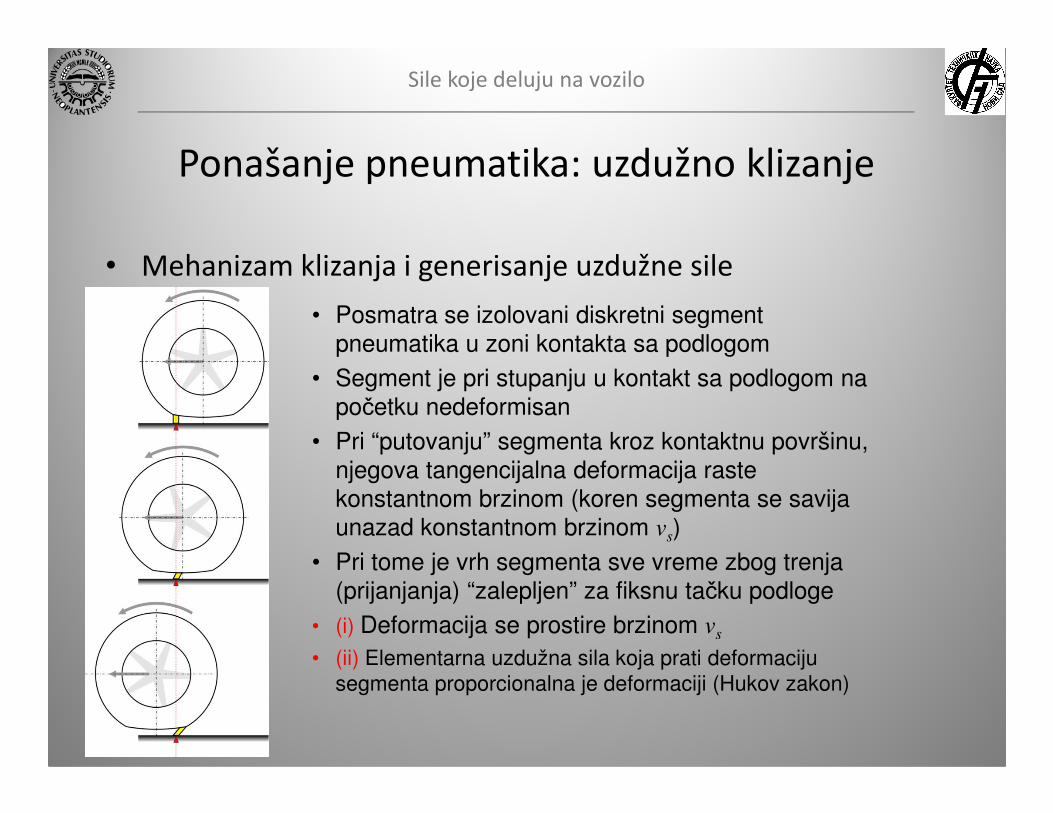
• Mehanizam klizanja i generisanje uzdužne sile
Ponašanje pneumatika: uzdužno klizanje
• Posmatra se izolovani diskretni segment pneumatika u zoni kontakta sa podlogom
• Segment je pri stupanju u kontakt sa podlogom na početku nedeformisanpočetku nedeformisan
• Pri “putovanju” segmenta kroz kontaktnu površinu, njegova tangencijalna deformacija raste konstantnom brzinom (koren segmenta se savija unazad konstantnom brzinom vs)
• Pri tome je vrh segmenta sve vreme zbog trenja (prijanjanja) “zalepljen” za fiksnu tačku podloge
• (i) Deformacija se prostire brzinom vs
• (ii) Elementarna uzdužna sila koja prati deformaciju segmenta proporcionalna je deformaciji (Hukov zakon)

Sile koje deluju na vozilo
• Mehanizam klizanja i generisanje uzdužne sile
Ponašanje pneumatika: uzdužno klizanje
• (i) Deformacija u(x) prostire se brzinom vS
u(x)v
ω
x
vS
vS
v = rT⋅ω - vS
Nema relativnog proklizavanja segmenta u odnosu na podlogu ali klizanje točka postoji jer je v≠vTeor!
rT⋅ω
Ovo je mehanizam DEFORMACIONOG klizanja. KLIZANJE ≠ PROKLIZAVANJE!

Sile koje deluju na vozilo
• Mehanizam klizanja i generisanje uzdužne sile
Ponašanje pneumatika: uzdužno klizanje
• (ii) Lokalna uzdužna sila prati porast lokalne uzdužne deformacije
u(x)
x
Ftan(x)
Ftan(x)
x
Raspodela kontinualne uzdužne sile
Ukupna uzdužna sila – tangencijalna reakcija podloge na točak XT –predstavlja sumu (integral) elementarnih lokalnih tangencijalnih sila
Rezultujuća sila XT je površini ispod linije

Sile koje deluju na vozilo
• Mehanizam klizanja i generisanje uzdužne sile
Ponašanje pneumatika: uzdužno klizanje
Mali pogonski momentMala deformacijaMalo klizanjeMala rezultujuća uzdužna sila
Veliki pogonski momentVelika deformacijaVeliko klizanjeVelika rezultujuća uzdužna sila
Sile koje deluju na vozilo
• Mehanizam klizanja i generisanje uzdužne sile
Ponašanje pneumatika: uzdužno klizanje
XT
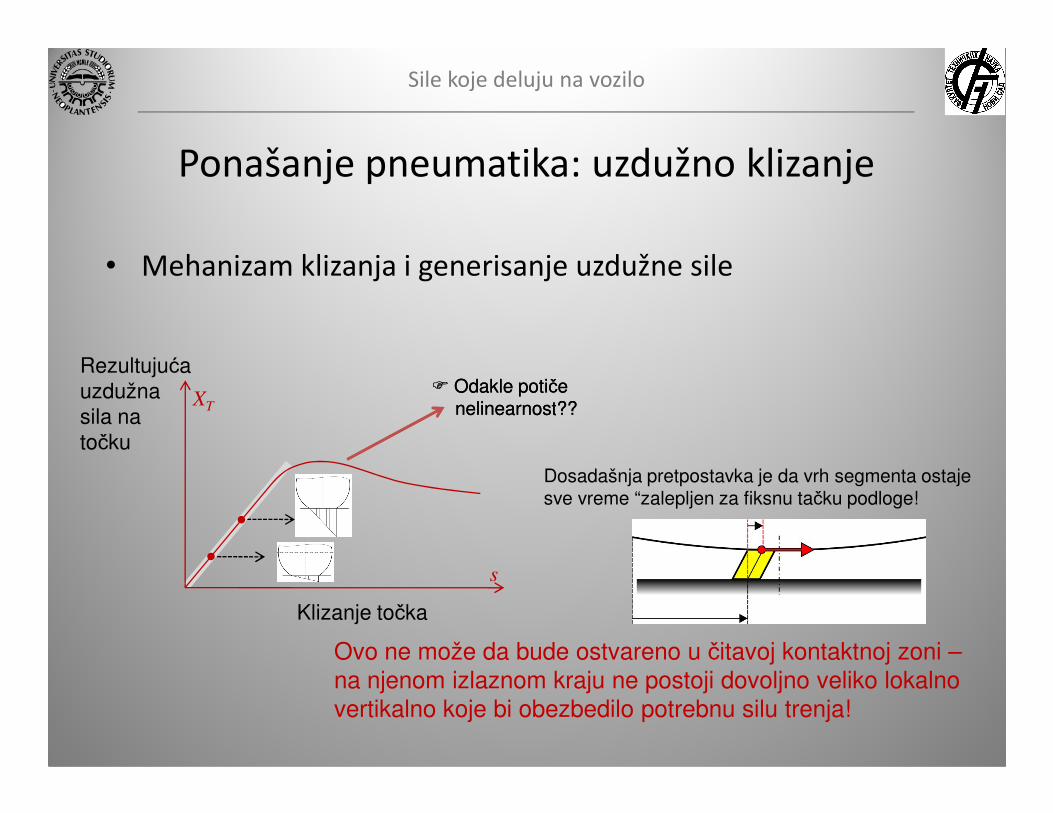
�� Odakle potiče Odakle potiče nelinearnostnelinearnost????
Rezultujuća uzdužna sila na
s
XT nelinearnostnelinearnost????sila na točku
Klizanje točka
Dosadašnja pretpostavka je da vrh segmenta ostaje sve vreme “zalepljen za fiksnu tačku podloge!
Ovo ne može da bude ostvareno u čitavoj kontaktnoj zoni –na njenom izlaznom kraju ne postoji dovoljno veliko lokalno vertikalno koje bi obezbedilo potrebnu silu trenja!
Sile koje deluju na vozilo
• Mehanizam klizanja i generisanje uzdužne sile
Ponašanje pneumatika: uzdužno klizanje
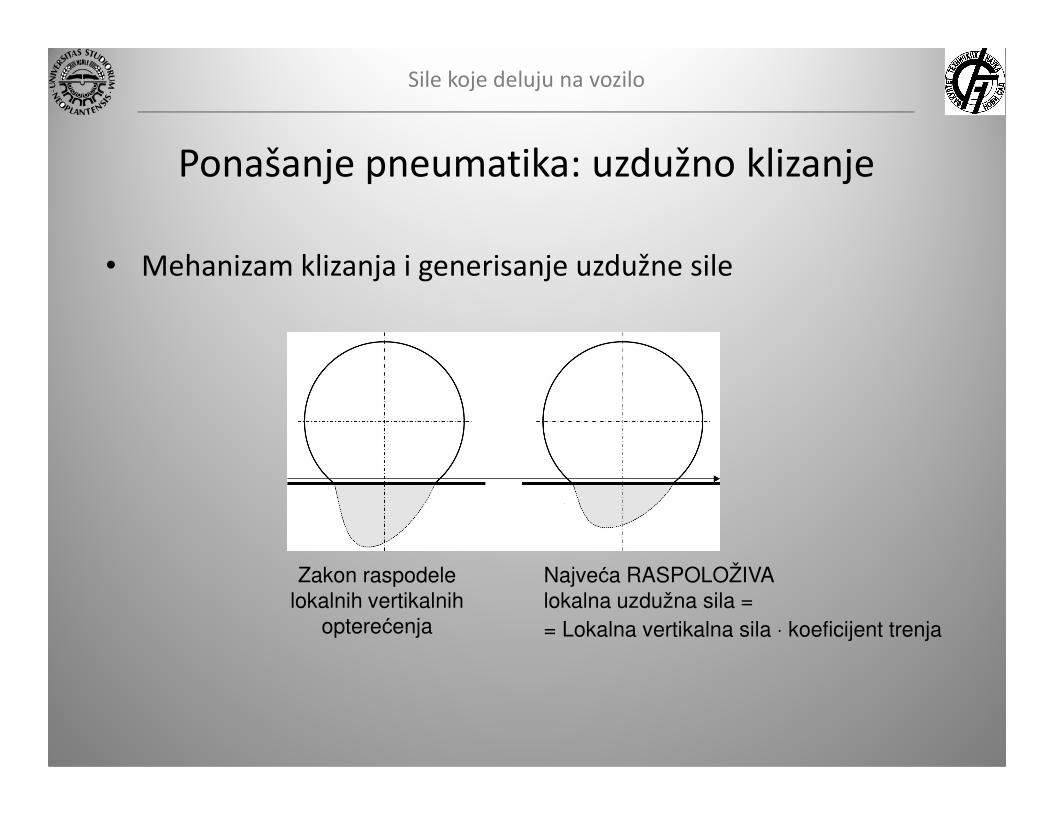
Zakon raspodele lokalnih vertikalnih
opterećenja
Najveća RASPOLOŽIVAlokalna uzdužna sila == Lokalna vertikalna sila ⋅ koeficijent trenja
Sile koje deluju na vozilo
• Mehanizam klizanja i generisanje uzdužne sile
Ponašanje pneumatika: uzdužno klizanje
x
1
2
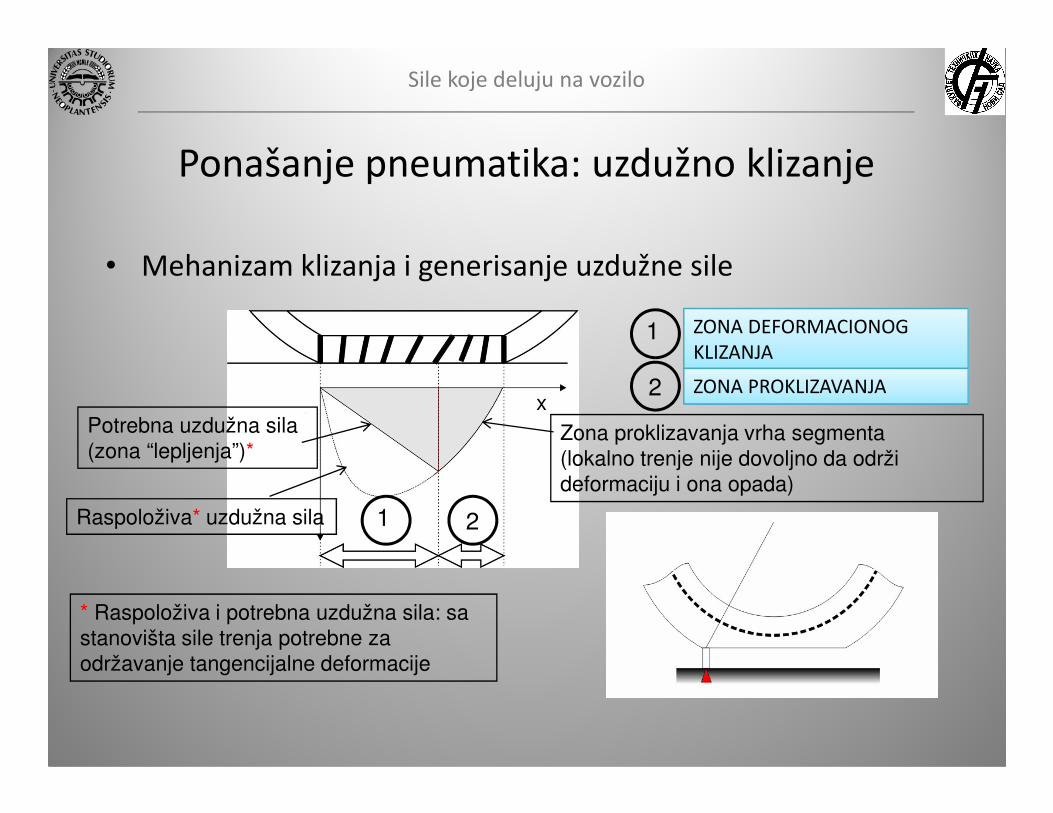
ZONA DEFORMACIONOG KLIZANJA
ZONA PROKLIZAVANJAx
Zona proklizavanja vrha segmenta(lokalno trenje nije dovoljno da održi deformaciju i ona opada)
Potrebna uzdužna sila(zona “lepljenja”)*
1 2Raspoloživa* uzdužna sila
* Raspoloživa i potrebna uzdužna sila: sa stanovišta sile trenja potrebne za održavanje tangencijalne deformacije

Sile koje deluju na vozilo
• Mehanizam klizanja i generisanje uzdužne sile
Ponašanje pneumatika: uzdužno klizanje
Rast površine ⇒ rast sile
Porast više nije linearan nego Porast više nije linearan nego degresivan!
s
XT
Porast momenta / sile XT
Porast deformacijePorast klizanja
Šta se dešava sa daljim Šta se dešava sa daljim porastom klizanjaporastom klizanja??
Dostignuta maksimalna Dostignuta maksimalna moguća sila moguća sila XXTT

Sile koje deluju na vozilo
• Mehanizam klizanja i generisanje uzdužne sile
Ponašanje pneumatika: uzdužno klizanje
Šta se dešava sa daljim Šta se dešava sa daljim porastom klizanjaporastom klizanja??
Dostignuta maksimalna Dostignuta maksimalna moguća sila moguća sila XXTT
Scenario:Scenario:
1. Točku je doveden obrtni moment pri kom sila XT ima maksimalnu moguću vrednost koju omogućava prijanjanje.
2. Nakon toga obrtni moment na točku se poveća
3. Sila XT ne može više da raste pa usled “viška” obrtnog momenta dolazi do ugaonog ubrzanja dω/dt, te do porasta ugaone brzine točka ω
4. Zbog toga dolazi do porasta relativne brzine proklizavanja cele kontaktne površine
5. Osobina gume je da pri porastu brzine proklizavanja koeficijent trenja opada, zbog čega pri daljem porastu klizanja opada sila XT!
Sile koje deluju na vozilo
• Mehanizam klizanja i generisanje uzdužne sile
Ponašanje pneumatika: uzdužno klizanje
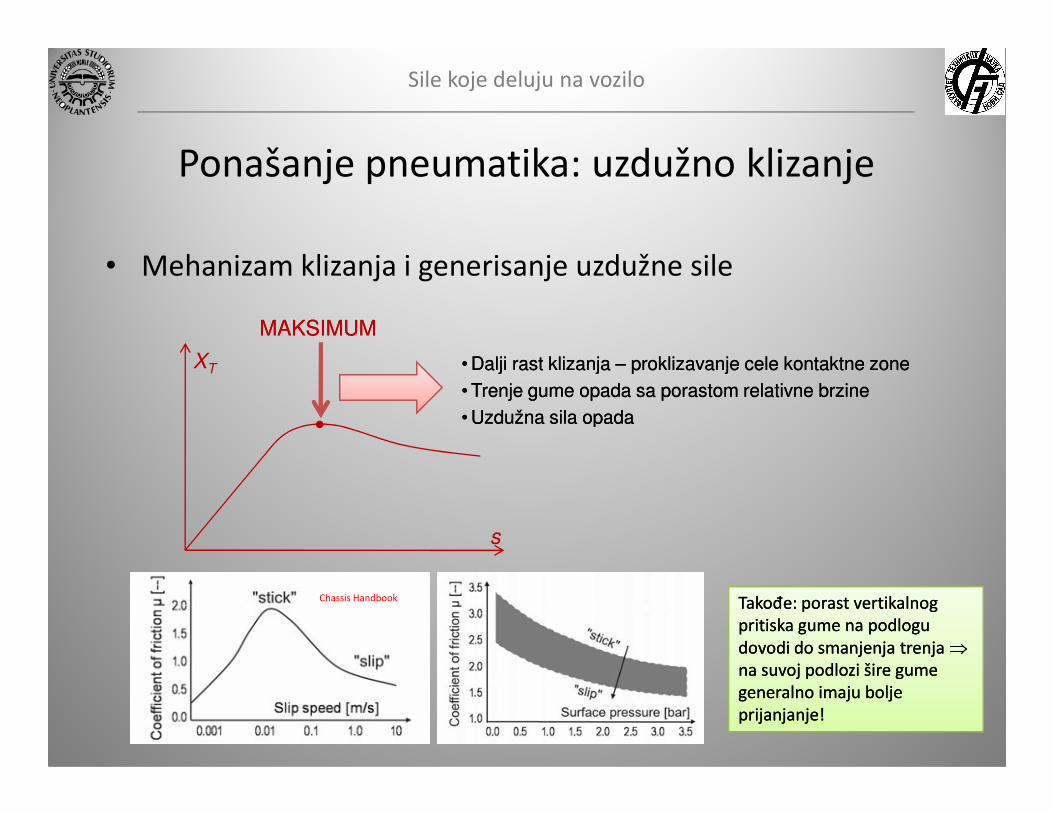
XT •• DaljiDalji rast klizanja rast klizanja –– proklizavanje cele kontaktne zoneproklizavanje cele kontaktne zone•• Trenje gume opada sa porastom relativne brzineTrenje gume opada sa porastom relativne brzine•• Uzdužna sila opadaUzdužna sila opada
MAKSIMUMMAKSIMUM
s
•• Uzdužna sila opadaUzdužna sila opada
Chassis Handbook Takođe: porast vertikalnog Takođe: porast vertikalnog pritiska gume na podlogu pritiska gume na podlogu dovodi do smanjenja trenja dovodi do smanjenja trenja ⇒⇒na suvoj podlozi šire gume na suvoj podlozi šire gume generalno imaju bolje generalno imaju bolje prijanjanjeprijanjanje!!
Sile koje deluju na vozilo
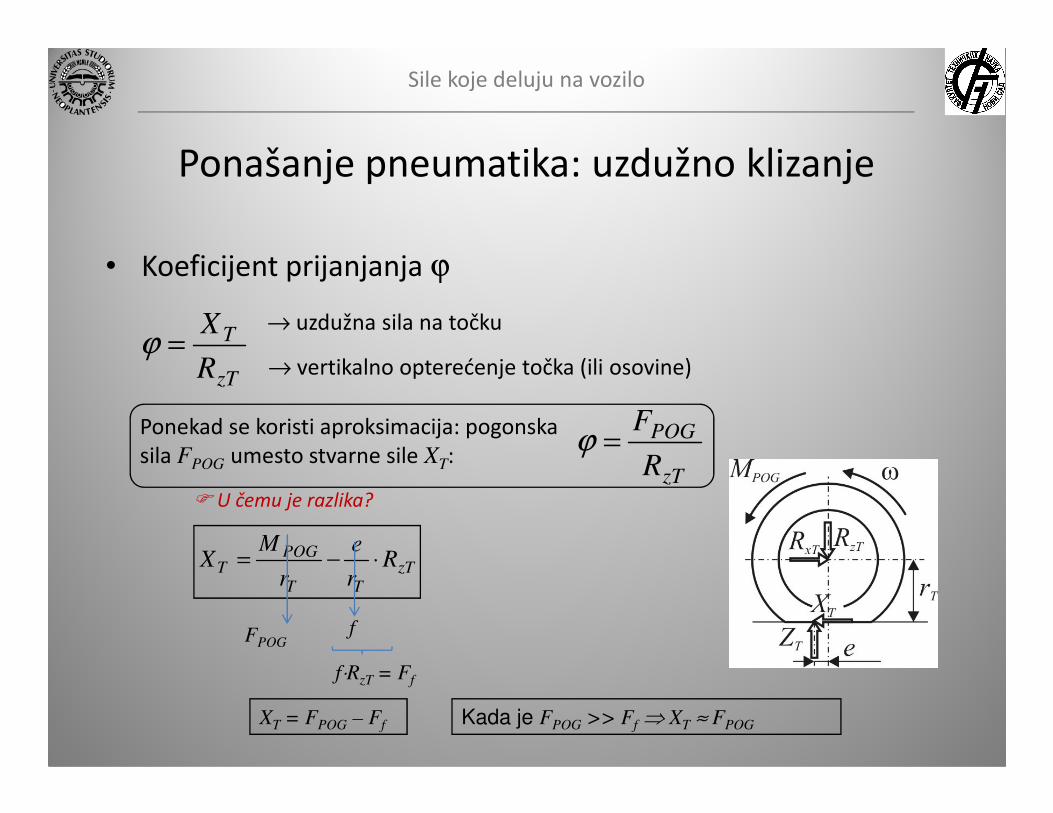
• Koeficijent prijanjanja ϕ
Ponašanje pneumatika: uzdužno klizanje
zT
T
R
X=ϕ
→ uzdužna sila na točku
→ vertikalno opterećenje točka (ili osovine)
FPonekad se koristi aproksimacija: pogonska sila FPOG umesto stvarne sile XT:
zT
POG
R
F=ϕ
� U čemu je razlika?
zT
TT
POGT R
r
e
r
MX ⋅−=
FPOGf
f⋅RzT = Ff
XT = FPOG – Ff Kada je FPOG >> Ff ⇒ XT ≈ FPOG
Sile koje deluju na vozilo
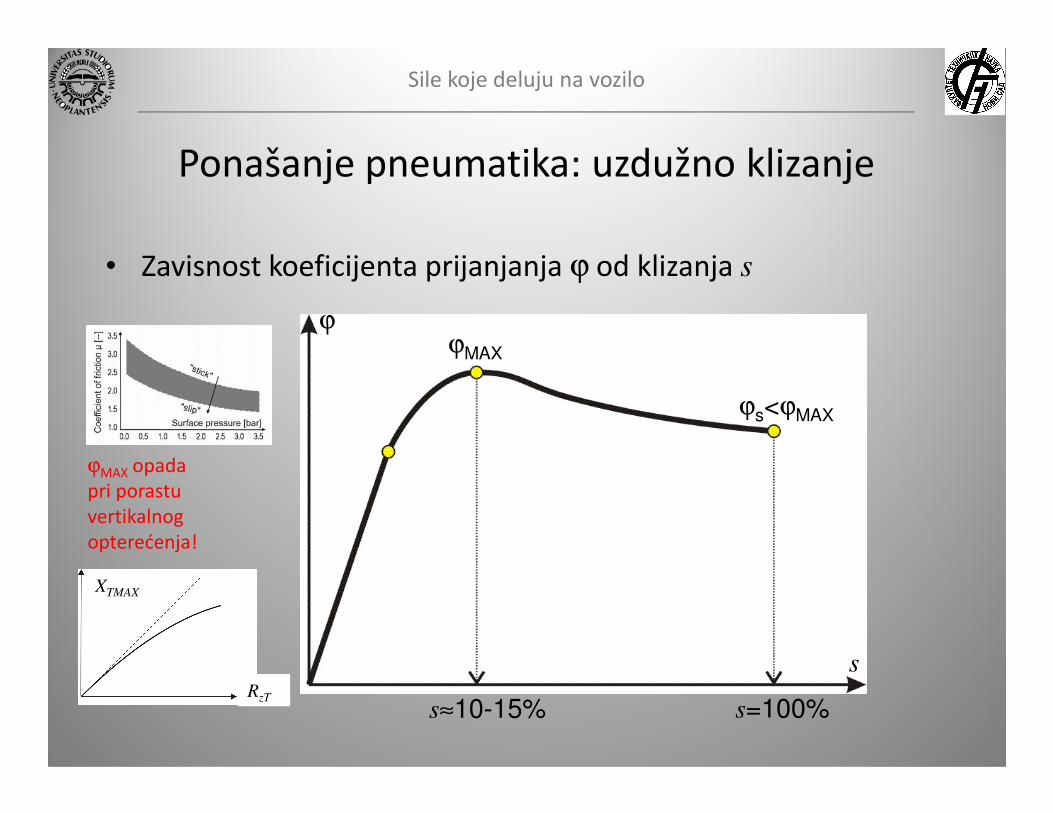
• Zavisnost koeficijenta prijanjanja ϕ od klizanja s
Ponašanje pneumatika: uzdužno klizanje
ϕMAX
ϕs<ϕMAX
ϕ
s
ϕs<ϕMAX
s=100%s≈10-15%
XTMAX
RzT
ϕMAX opada pri porastu vertikalnog opterećenja!

Sile koje deluju na vozilo
• Primeri dijagrama ϕ= ϕ(s) za neke podloge
Ponašanje pneumatika: uzdužno klizanje
ϕ
Suv asfalt
Suv beton
Izvor: Wallentowitz
s (%)
Na vlažnim podlogama prijanjanje sa porastom klizanja opada mnogo brže nego na suvim.
Vlažan beton
Utabani sneg
Poledica
→ primer: Uroš Branković MSC rad

Sile koje deluju na vozilo
• Pojam bočnog povođenja
Ponašanje pneumatika: bočno povođenje
Kada se pneumatiku prilikom kotrljanja saopšti bočna sila, točak se kotrlja pod određenim uglom u odnosu na pravac njegove uzdužne ose (odnosno kotrlja se njegove uzdužne ose (odnosno kotrlja se ukoso u odnosu na pravac u kom “gleda”)
PUTANJA KOTRLJANJA TOČKA
UZDUŽNA OSA
BOČNA SILA
Ugao između pravca kretanja točka i pravca njegove uzdužne ose naziva se ugao povođenja.
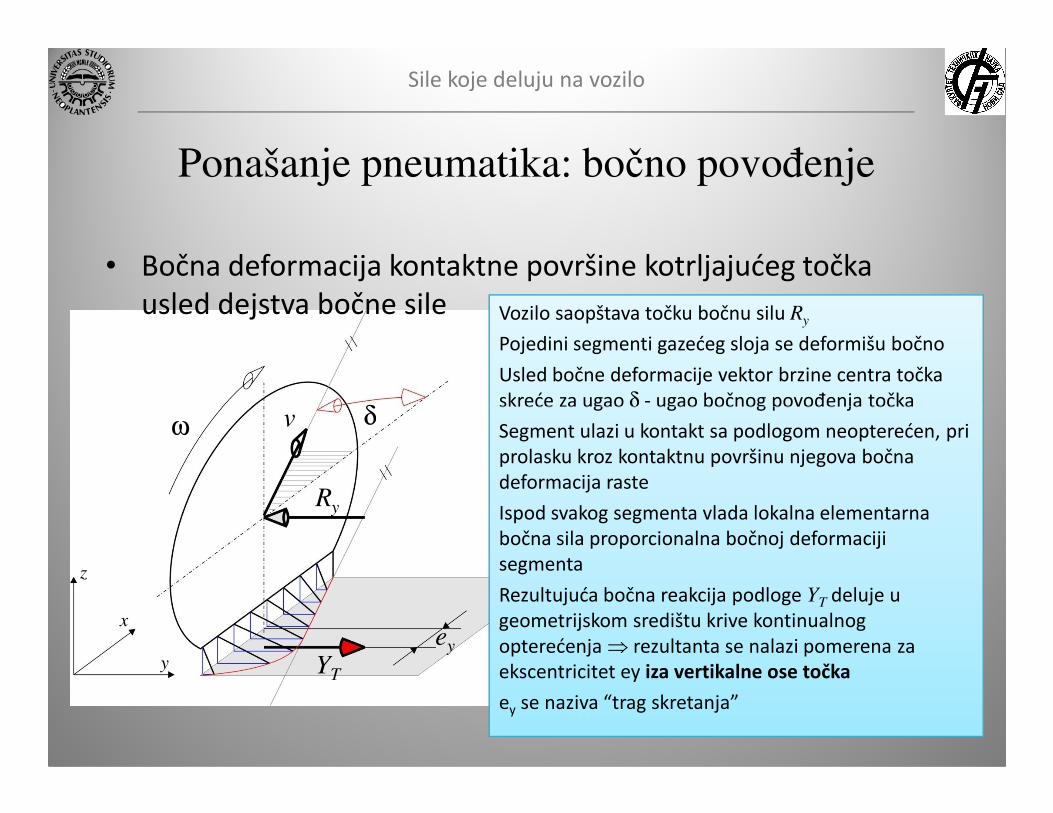
Sile koje deluju na vozilo
Ponašanje pneumatika: bočno povođenje
Vozilo saopštava točku bočnu silu Ry
Pojedini segmenti gazećeg sloja se deformišu bočno
Usled bočne deformacije vektor brzine centra točka skreće za ugao δ - ugao bočnog povođenja točka
v δ
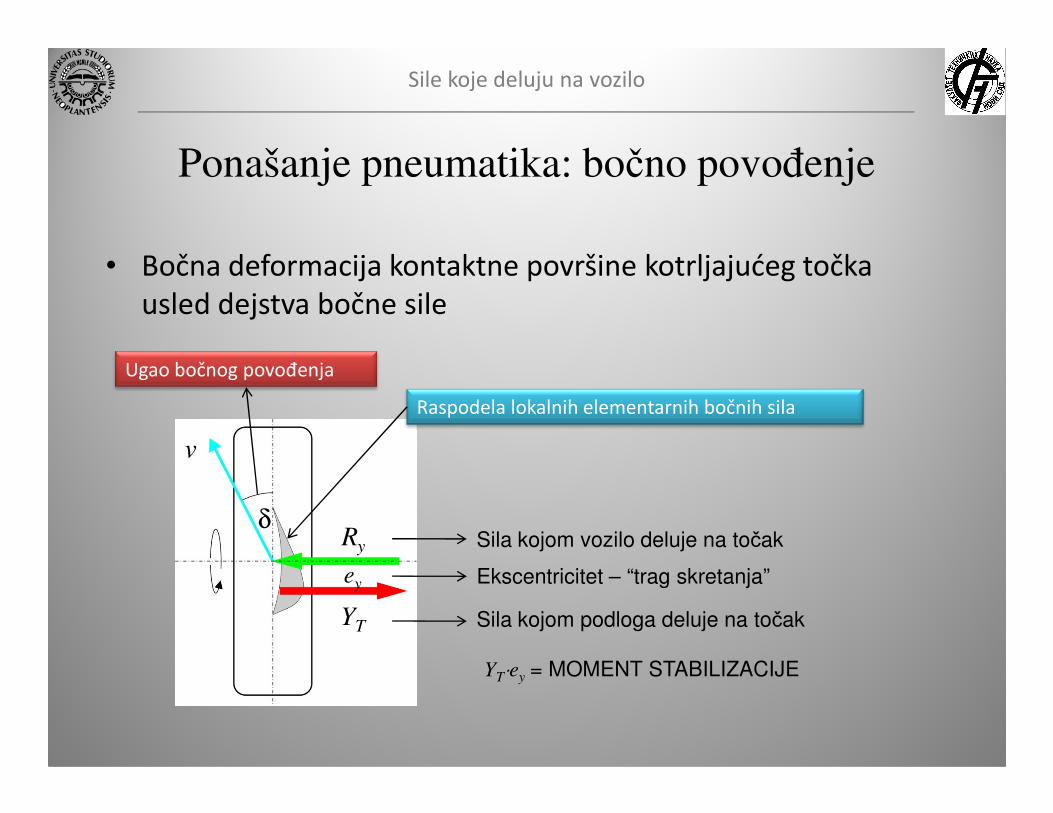
• Bočna deformacija kontaktne površine kotrljajućeg točka usled dejstva bočne sile
skreće za ugao δ - ugao bočnog povođenja točka
Segment ulazi u kontakt sa podlogom neopterećen, pri prolasku kroz kontaktnu površinu njegova bočna deformacija raste
Ispod svakog segmenta vlada lokalna elementarna bočna sila proporcionalna bočnoj deformaciji segmenta
Rezultujuća bočna reakcija podloge YT deluje u geometrijskom središtu krive kontinualnog opterećenja ⇒ rezultanta se nalazi pomerena za ekscentricitet ey iza vertikalne ose točka
ey se naziva “trag skretanja”
Ry
YT
v δ
ey
ω
x
z
y
Sile koje deluju na vozilo
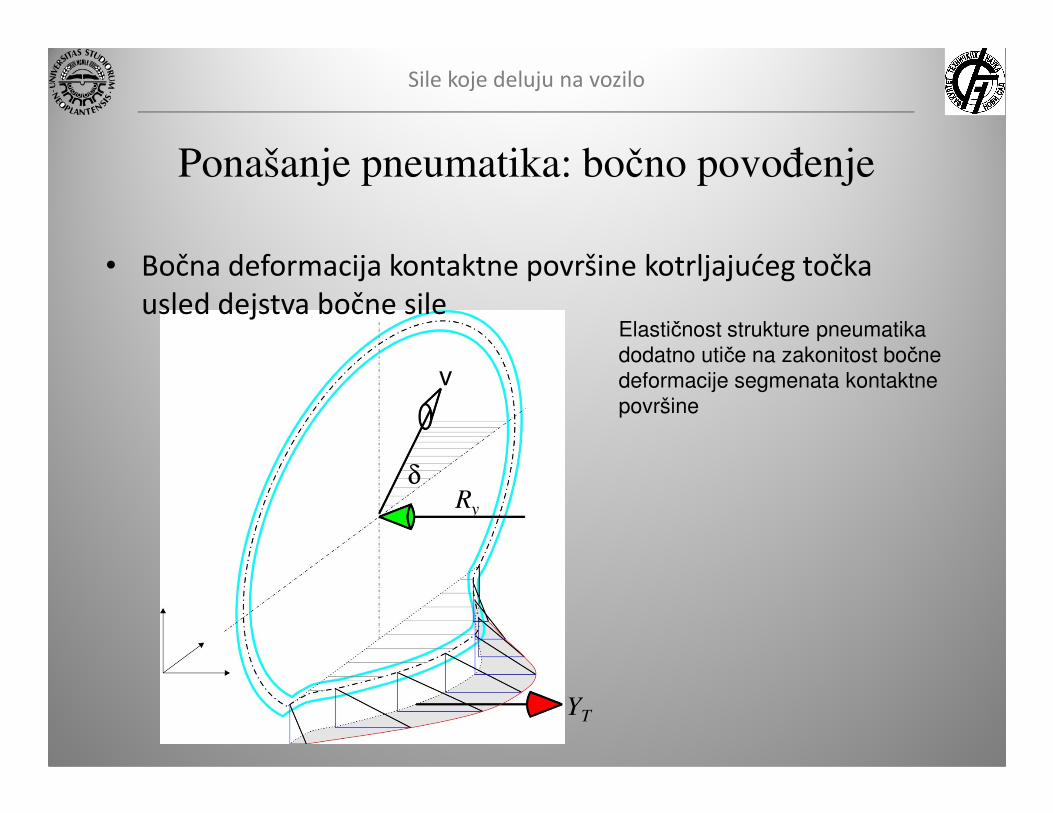
Ponašanje pneumatika: bočno povođenje
Elastičnost strukture pneumatika dodatno utiče na zakonitost bočne deformacije segmenata kontaktne površine
v
• Bočna deformacija kontaktne površine kotrljajućeg točka usled dejstva bočne sile
površine
Ry
δ
YT
Sile koje deluju na vozilo
Ponašanje pneumatika: bočno povođenje
Raspodela lokalnih elementarnih bočnih sila
Ugao bočnog povođenja
• Bočna deformacija kontaktne površine kotrljajućeg točka usled dejstva bočne sile
YT
v
Ry
δ
ey
Raspodela lokalnih elementarnih bočnih sila
Sila kojom vozilo deluje na točak
Ekscentricitet – “trag skretanja”
Sila kojom podloga deluje na točak
YT⋅ey = MOMENT STABILIZACIJE

Sile koje deluju na vozilo
• Ponašanje u pogledu traga skretanja i momenta stabilizacije
Ponašanje pneumatika: bočno povođenje
stanford.edu
ey
ey
YTPodloga sa velikim prijanjanjem
Podloga sa malim prijanjanjem

Sile koje deluju na vozilo
• Zavisnost bočne sile YT i momenta stabilizacije MS od ugla povođenja δ
Ponašanje pneumatika: bočno povođenje
MS
fromThe Automotive
Chassis Vol. 1
from Chassis
HandbookUočiti uticaj vertikalne sile (RzT)!
δ
Trag skretanja opada pri porastu δ!
Sile koje deluju na vozilo
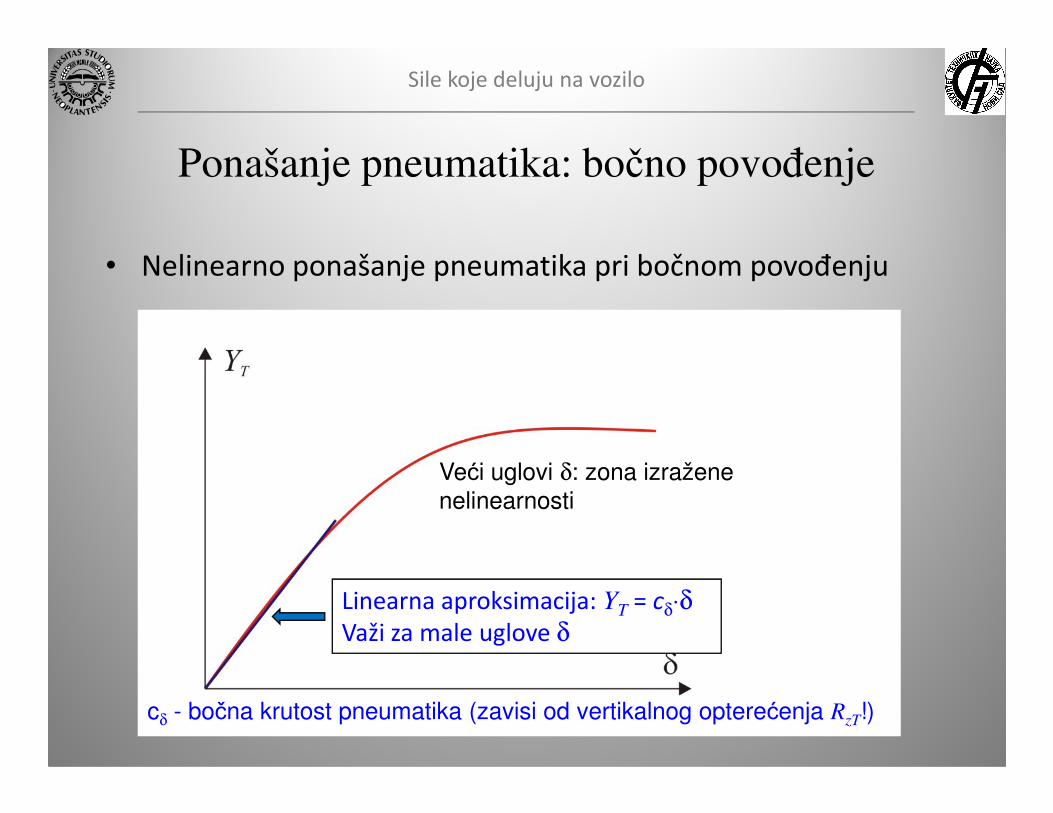
• Nelinearno ponašanje pneumatika pri bočnom povođenju
Ponašanje pneumatika: bočno povođenje
cδ - bočna krutost pneumatika (zavisi od vertikalnog opterećenja RzT!)
Veći uglovi δ: zona izražene nelinearnosti
Linearna aproksimacija: YT = cδ⋅δVaži za male uglove δ

Sile koje deluju na vozilo
• Faktori koji utiču na karakter zavisnosti između bočne sile i ugla povođenja:
Ponašanje pneumatika: bočno povođenje
Vertikalno opterećenje
Pritisak pneumatikaPritisak pneumatika
Ugao bočnog nagiba
Prisustvo uzdužne sile
itd.
wikipedia
Sile koje deluju na vozilo
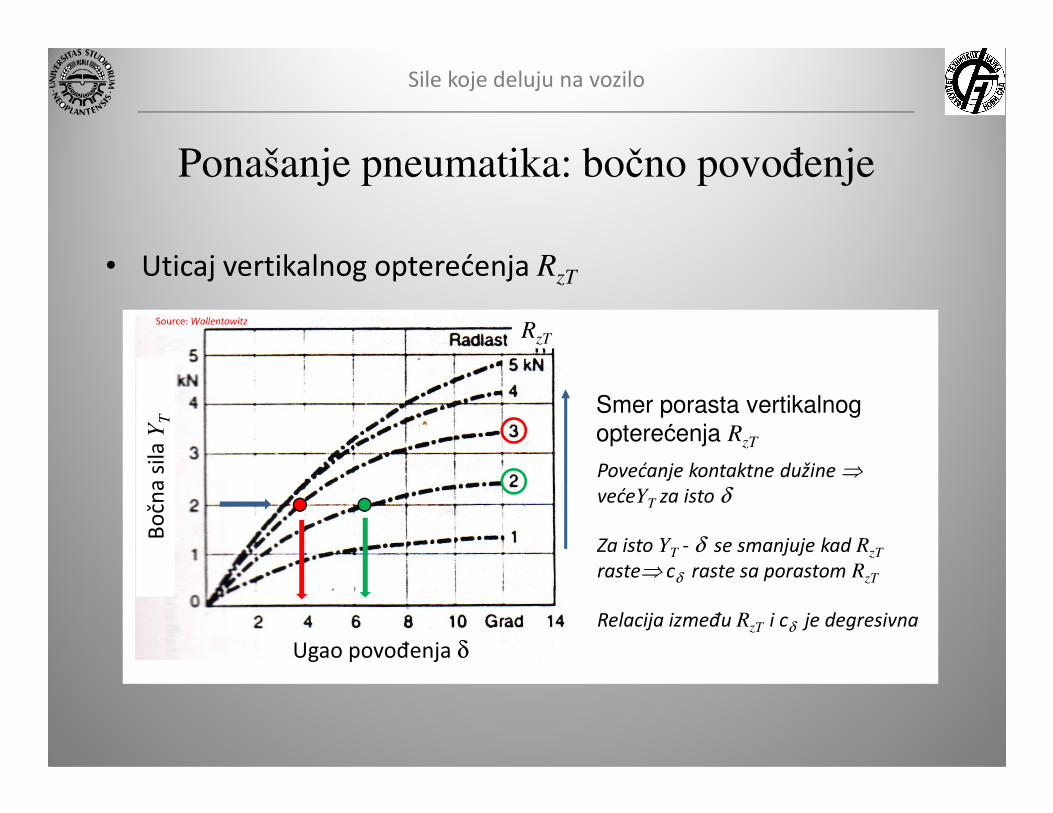
• Uticaj vertikalnog opterećenja RzT
Ponašanje pneumatika: bočno povođenje
Source: Wallentowitz
RzT
Smer porasta vertikalnog
Bo
čna
sila
YT
Ugao povođenja δ
Povećanje kontaktne dužine ⇒
većeYT za isto δ
Za isto YT - δ se smanjuje kad RzT
raste⇒ cδ raste sa porastom RzT
Relacija između RzT i cδ je degresivna
Smer porasta vertikalnog opterećenja RzT
Sile koje deluju na vozilo
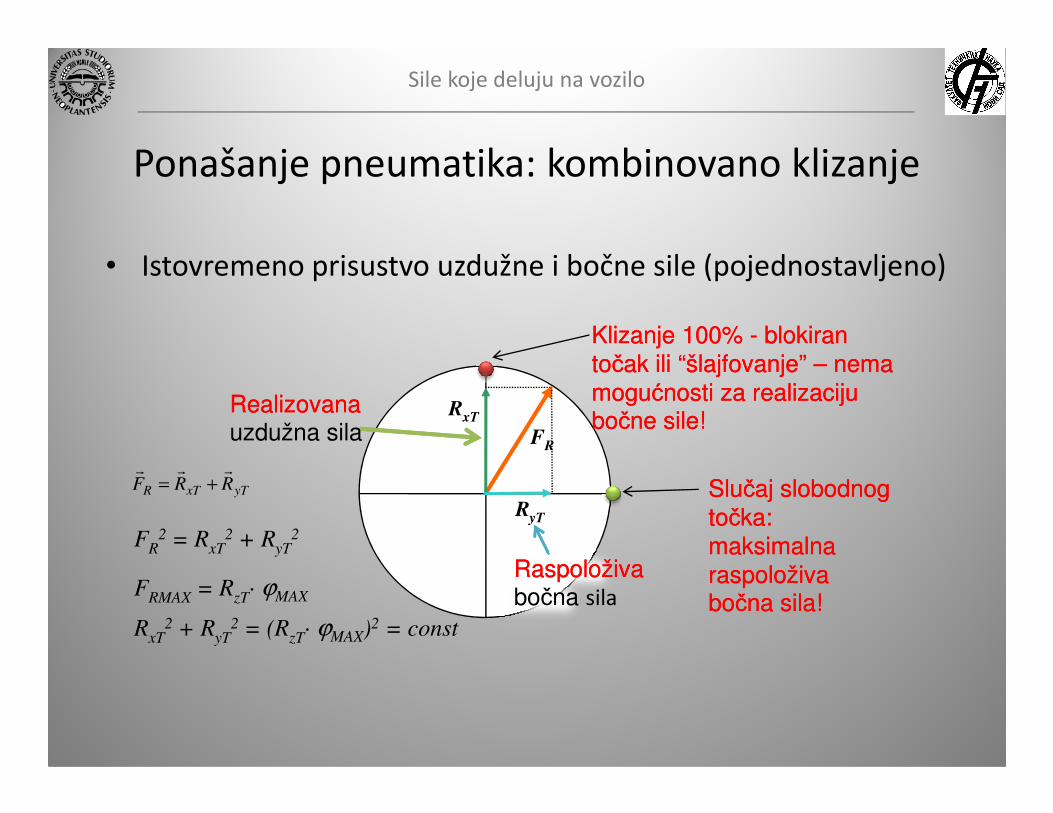
• Istovremeno prisustvo uzdužne i bočne sile (pojednostavljeno)
Ponašanje pneumatika: kombinovano klizanje
RRealizovana Realizovana
Klizanje 100% Klizanje 100% -- blokiran blokiran točak ili “šlajfovanje” točak ili “šlajfovanje” –– nema nema mogućnosti za realizaciju mogućnosti za realizaciju
yTxTR RRFrrr
+=
FR2 = RxT
2 + RyT2
FR
RyT
RxT
FRMAX = RzT· ϕMAX
RxT2 + RyT
2 = (RzT· ϕMAX)2 = const
Raspoloživa Raspoloživa bočna sila
Realizovana Realizovana uzdužna sila bočne sile!bočne sile!
Slučaj slobodnog Slučaj slobodnog točka: točka: maksimalna maksimalna raspoloživa raspoloživa bočna sila!bočna sila!

Sile koje deluju na vozilo
Modeliranje zavisnosti klizanja i prijanjanja
Najpoznatiji primer empirijskog modela: “Magična formula”, Hans Pacejka
• Analitički (“brush” model, Fiala, MKE...)• Empirijski
D – maksimalna vrednostC – faktor oblika
0
0,2
0,4
0,6
0,8
1
1,2
0 0,2 0,4 0,6 0,8 1
0
0,2
0,4
0,6
0,8
1
1,2
0 0,2 0,4 0,6 0,8 1
D = 1C = 1,9B = 8
E = 0,85
D = 1C = 2,1B = 8
E = 0,4
B – faktor krutostiE – faktor zakrivljenosti

Sile koje deluju na vozilo
Modeliranje zavisnosti klizanja i prijanjanja
Primer empirijskog modela u programu za simulaciju dinamike vozila CarSim (“Look-up
Table”)

Sile koje deluju na vozilo
• Nelinearno, frekventno zavisno ponašanje
• Izrazita deformabilnost, velike deformacije
• Kompleksna geometrija
Generalna svojstva i problemi ponašanja i modeliranja pneumatika
• Viskoelastičnost
• Kompozit, anizotropija
• Širok spektar relevantnih aspekata ponašanja
• Veoma velik broj različitih pristupa modeliranju i složenosti modela