



Introdução à Visualização VolumétricaIntrodução à Visualização Volumétrica
porRoberto de Beauclair Seixas, IMPAAnselmo Cardoso de Paiva, UFMA
Marcelo Gattass, PUC-Rio

Visualização VolumétricaVisualização Volumétrica
Conjunto de técnicas para visualização de dados associados a regiões de um volume– Objetivo : exibição do interior de objetos
volumétricos, a fim de explorar sua estrutura (ou falta dela) e facilitar sua compreensão [McCormick, 1987].
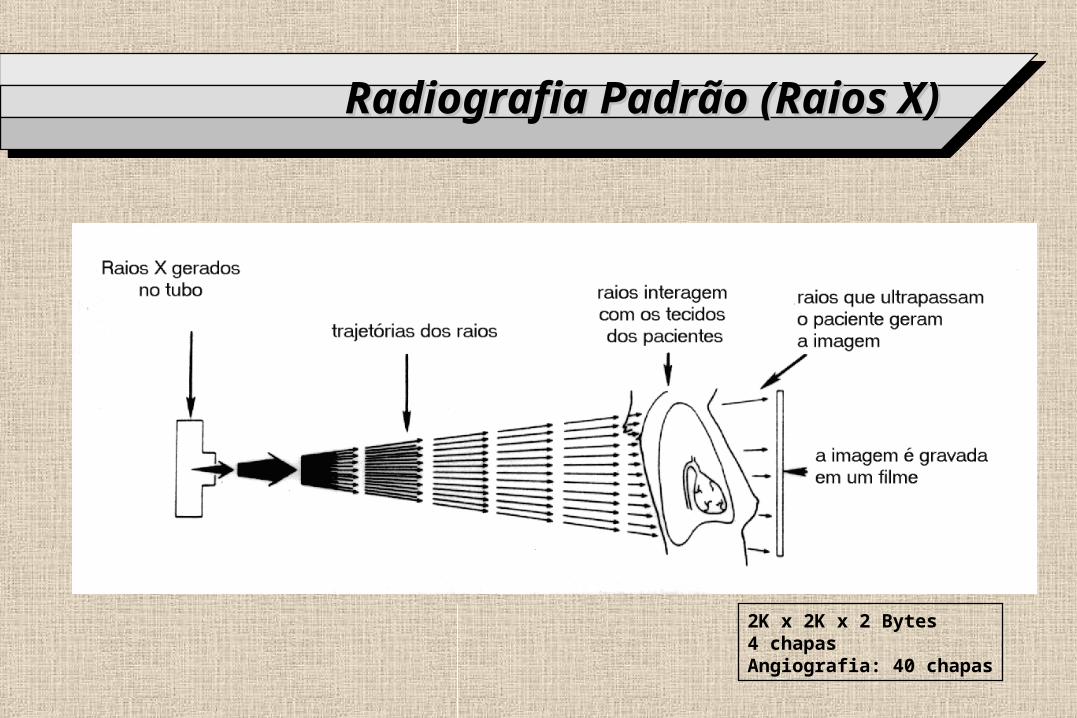
Radiografia Padrão (Raios X)Radiografia Padrão (Raios X)
2K x 2K x 2 Bytes4 chapasAngiografia: 40 chapas

Tomografia Computadorizada (TC)Tomografia Computadorizada (TC)
Receptores
Raio X
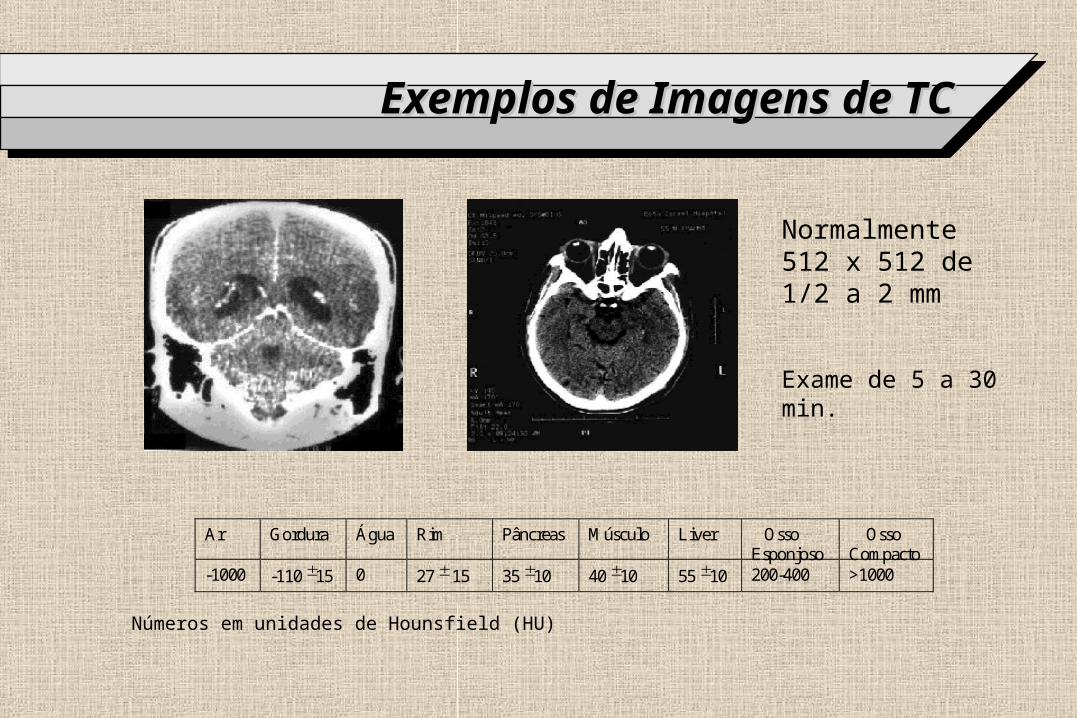
Exemplos de Imagens de TCExemplos de Imagens de TC
Normalmente 512 x 512 de 1/2 a 2 mm
Ar Gordura Água Rim Pâncreas Músculo Liver OssoEsponjoso
OssoCompacto
-1000 -110 15 0 27 15 35 10 40 10 55 10 200-400 >1000
Números em unidades de Hounsfield (HU)
Exame de 5 a 30 min.

Problemas da TCProblemas da TC
Pequena resolução temporal para movimento cardíaco;
Presença de artefatos inerentes ao método de aquisição;
Resolução espacial relativamente pequena;
Inabilidade de detecção de doenças em estágios incipientes que não tenha resultado ainda em significantes alterações dos coeficientes de densidade dos tecidos.

Ressonância Magnética Nuclear (MR)Ressonância Magnética Nuclear (MR)
Grande campomagnético
Mesa comtrilhos
Principais Vantagens de MRPrincipais Vantagens de MR
Produzem contraste de tecidos moles superior as outras modalidades, sem a necessidade de agentes de contraste externo;
Permitem a detecção de doenças anteriormente ao aparecimento de grandes mudanças anatômicas ou fisiológicas;
Fornecem também informação fisiológica e funcional; As imagens podem ser adquiridas em planos arbitrários, através
de manipulação eletrônica sem necessidade de mudanças na postura do paciente;
A ausência de radiação ionizante permite a realização de estudos freqüentes sobre o paciente.

Desvantagens de MRDesvantagens de MR
Dificuldades no estudo de calcificações;
Suscetibilidade a movimentos do paciente durante a aquisição, por ser um processo lento;
Impossibilidade de aquisição de dados de pacientes em sistemas artificiais de suporte a vida (UTI);
Inexistência de uma escala de valores absolutos para um determinado conjunto de dados;
Alto custo.
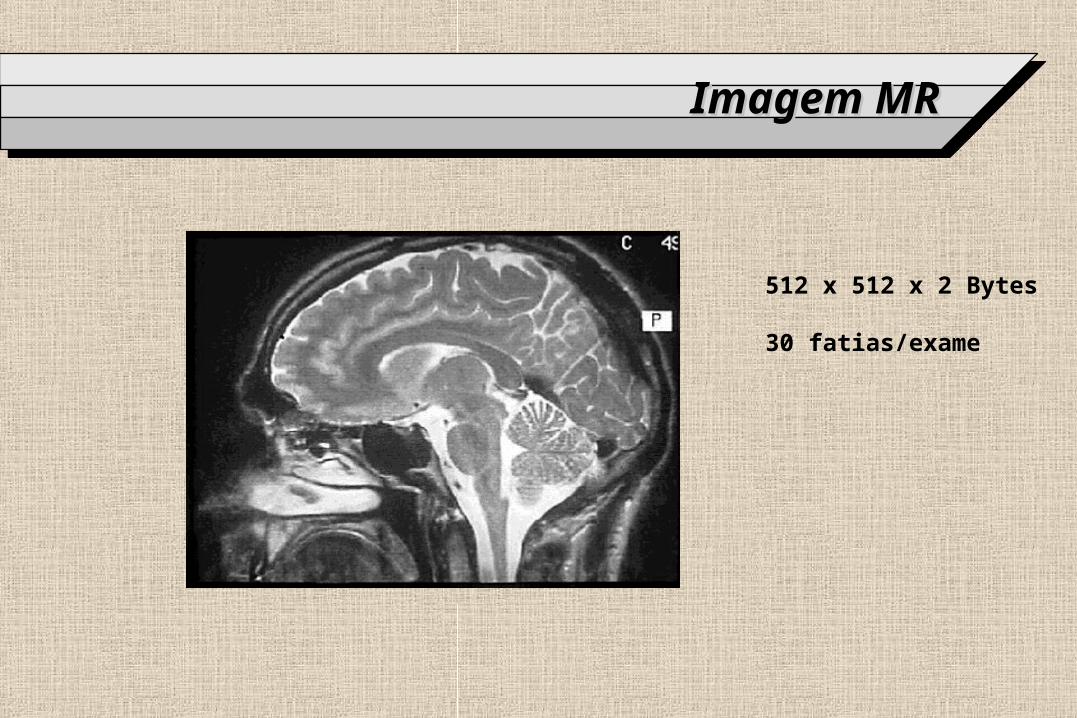
Imagem MRImagem MR
512 x 512 x 2 Bytes
30 fatias/exame

Ultra-somUltra-som

Imagem de Ultra-somImagem de Ultra-som
512 x 512 x 1 Byte

Medicina NuclearMedicina Nuclear
SPECT (Single Photon Emission Computed Tomography)
PET (Positron Emission Tomography)
256 x 256 x 2 Bytes
Câmera Gama bone scan galium scan
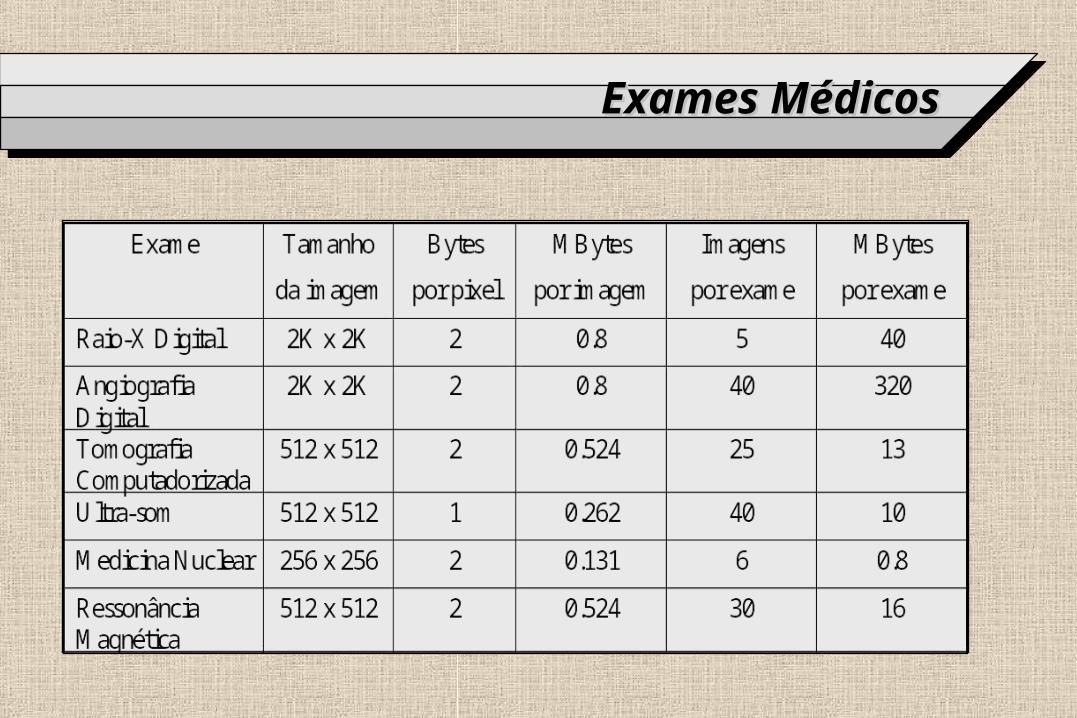
Exames MédicosExames Médicos

SísmicaSísmica

Formação de um traço sísmicoFormação de um traço sísmico
*

Seção SísmicaSeção Sísmica

Reconstrução das FatiasReconstrução das Fatias
Zs
Ys
Xs
volume dasfatias (slices)
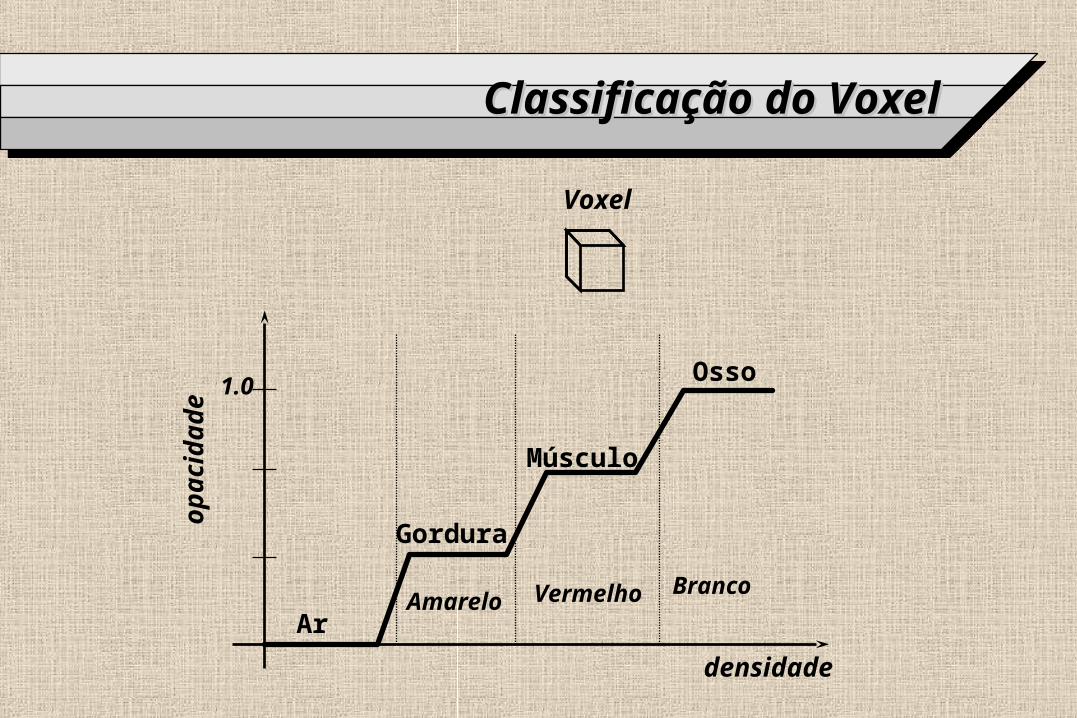
Classificação do VoxelClassificação do Voxel
Voxel
densidade
Ar
Gordura
Músculo
Osso
op
acid
ade
Amarelo Vermelho Branco
1.0

Tipos de DadosTipos de Dados
Enumeráveis (material, litologia, ...)
Escalares (temperatura, pressão, ...)
Vetoriais (velocidade, aceleração, ...)
Tensoriais (tensão, deformação, ...)

Estrutura dos DadosEstrutura dos Dados
Grade Cartesiana (i, j, k)
Grade Regular (i*dx, j*dy,k*dz)
Grade Retilínea (x[i],y[j],z[k])
Grade Estruturada (x[i,j,k],y[i,j,k],z[i,j,k])
Grade Não Estruturada {(x[i],y[i],z[i]) ,
e=(v1, v2 , v3)}Grade Estruturada
por blocos
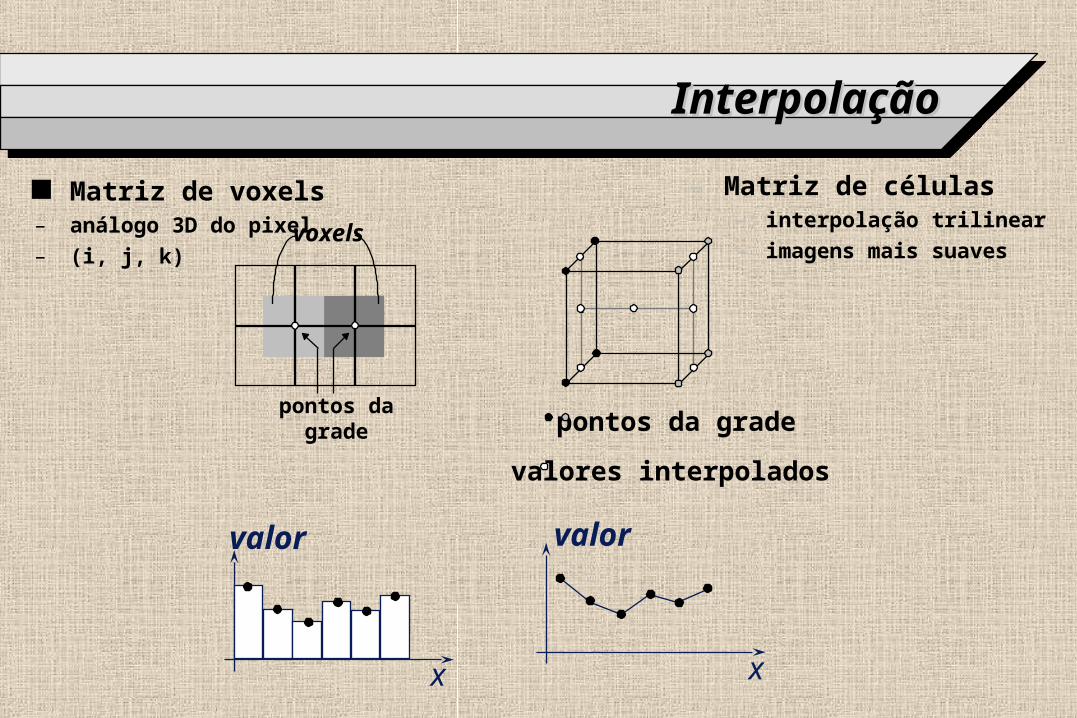
InterpolaçãoInterpolação
pontos dagrade
voxels
valores interpolados
pontos da grade
valor valor
x x
Matriz de voxels – análogo 3D do pixel
– (i, j, k)
– Matriz de células– interpolação trilinear
– imagens mais suaves

Métodos de VisualizaçãoMétodos de Visualização
Indiretos: por extração de superfícies implícitas+ representação por polígonos [Zbuffer]+ dados menores– precisa ser refeito quando muda a classificação– dificuldade de modelar objetos amorfos
Diretos: por modelos de iluminação volumétrica+ geração de imagens diretamente a partir dos dados volumétricos+ visualização de múltiplas características, inclusive de dados amorfos– grande volume de dados– não usa (por enquanto) hardware gráfico
Rendering DiretoRendering Direto
Mapeamento dos elementos de volume direto no espaço da imagem
Apropriados para a visualização de objetos amorfos
Mais lentos
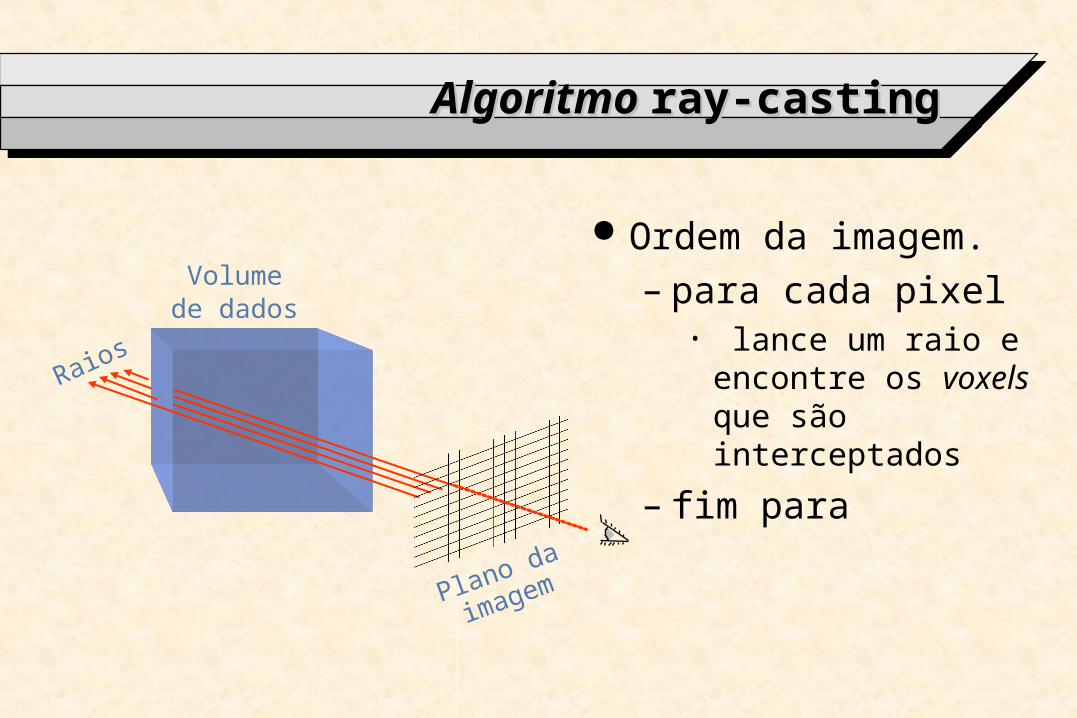
Algoritmo Algoritmo ray-castingray-casting
Raios
Plano da
imagem
Volumede dados
Ordem da imagem. – para cada pixel
• lance um raio e encontre os voxels que são interceptados
– fim para

Lançamento dos RaiosLançamento dos Raios
volume dosraios
volume dosslices
plano devisualização
raio
x
y
z

Partição dos RaiosPartição dos Raios
x
y
z ta
tb
t=min(x,y,z)
amostra
voxel

Interpolação Interpolação
x,i
y,j
z,k
(xa, ya, za)
Dzzk
Dyyj
Dxxi
a
a
a
Dz
Dzzz
Dy
Dyyy
Dx
Dxxx
a
a
a
%
%
%

Interpolação no voxelInterpolação no voxel
1,1,1
1,1,
1,,1
1,,
,1,1
,1,
,,1
,,
1
1
11
1
11
11
111),,(
kji
kji
kji
kji
kji
kji
kji
kji
vzyx
vzyx
vzyx
vzyx
vzyx
vzyx
vzyx
vzyxzyxv
vi+1,j+1,k+1
vi,j,k
vi+1,j,k
vi,j+1,k
vi,j,k +1
vi +1,j,k +1
vi,j +1,k +1
vi+1,j+1,k
xy
zv
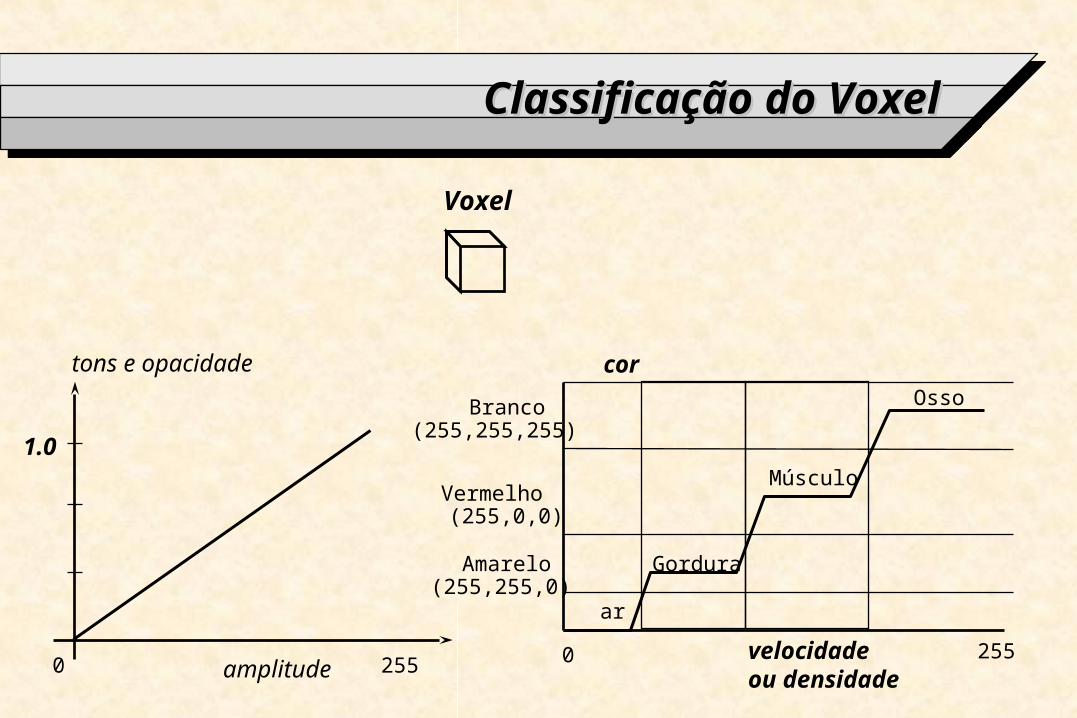
Classificação do VoxelClassificação do Voxel
Voxel
velocidadeou densidadeamplitude
tons e opacidade
1.0
cor
ar
Gordura
Músculo
Osso
0 255
Branco(255,255,255)
Vermelho (255,0,0)
Amarelo(255,255,0)
0 255

Diferentes Funções de TransferênciaDiferentes Funções de Transferência

Sensibilidade à função de transferênciaSensibilidade à função de transferência
0
0 .2
0 .4
0 .6
0 .8
1
0 50 100 150 2000
0 .2
0 .4
0 .6
0 .8
1
0 50 100 150 200
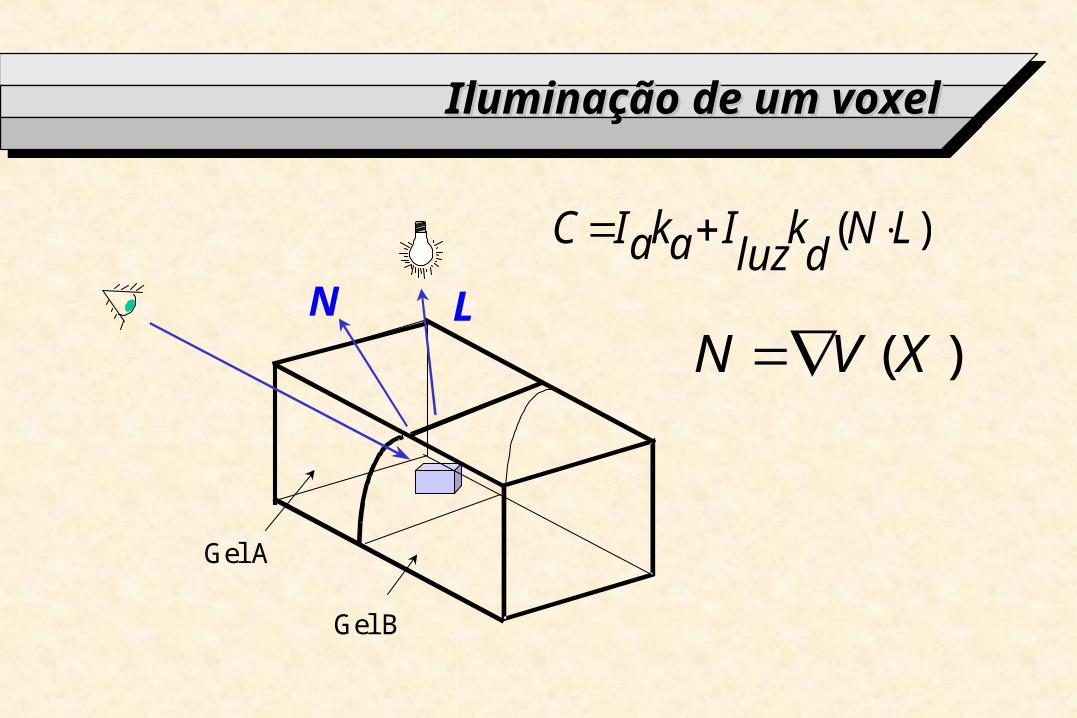
Iluminação de um voxelIluminação de um voxel
)( LNd
kluz
IakaIC
)(XVN N L
Gel A
Gel B
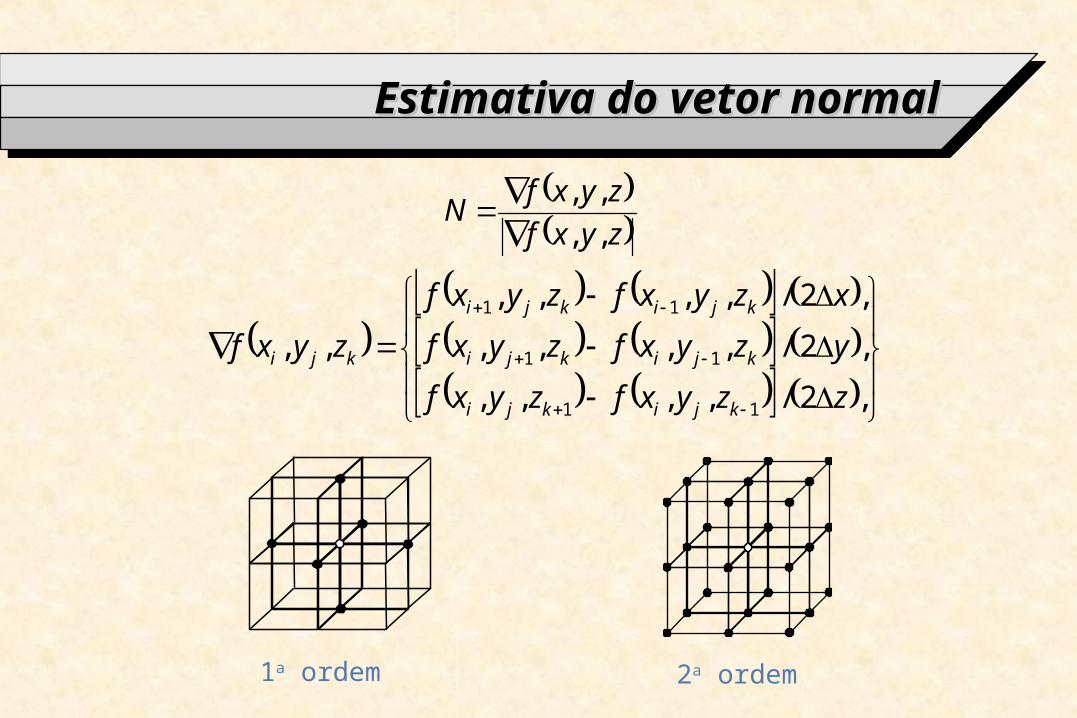
1a ordem
Estimativa do vetor normalEstimativa do vetor normal
,2/,,,,
,2/,,,,
,2/,,,,
,,
11
11
11
zzyxfzyxf
yzyxfzyxf
xzyxfzyxf
zyxf
kjikji
kjikji
kjikji
kji
zyxf
zyxfN
,,
,,
2a ordem
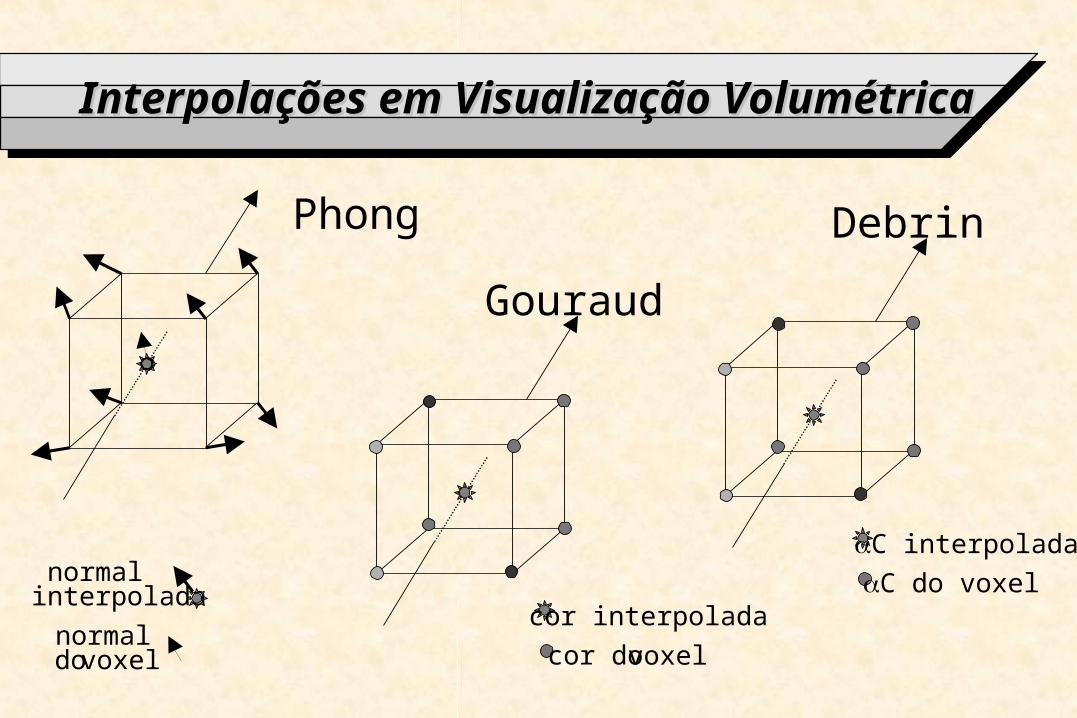
Interpolações em Visualização VolumétricaInterpolações em Visualização Volumétrica
normalinterpolada
normaldo voxel
cor interpolada
cor do voxel
Phong
Gouraud
C interpolada
C do voxel
Debrin
Etapa de ComposiçãoEtapa de Composição
Para cada raio:gera amostras de cor C(pi) e opacidades (pi)
» reamostragem dos dados dos voxels, em k amostras igualmente espaçadas
Processo de acumulaçãoI= t Ib +(1-t)I0
I0 = cor do objetoIb = cor do fundoI = cor resultantet = coeficiente de transparência

Influência de um VoxelInfluência de um Voxel
r = g = b =
r0
g0
b0
r = r0
g = g0b = b0
r1
g1
b1
r = r0+r1 g = g0+g1b = b0+b1+

Composição no raioComposição no raio
)1( ininout
CininCoutC )1(
outoutCC
Cin
Cout
ray
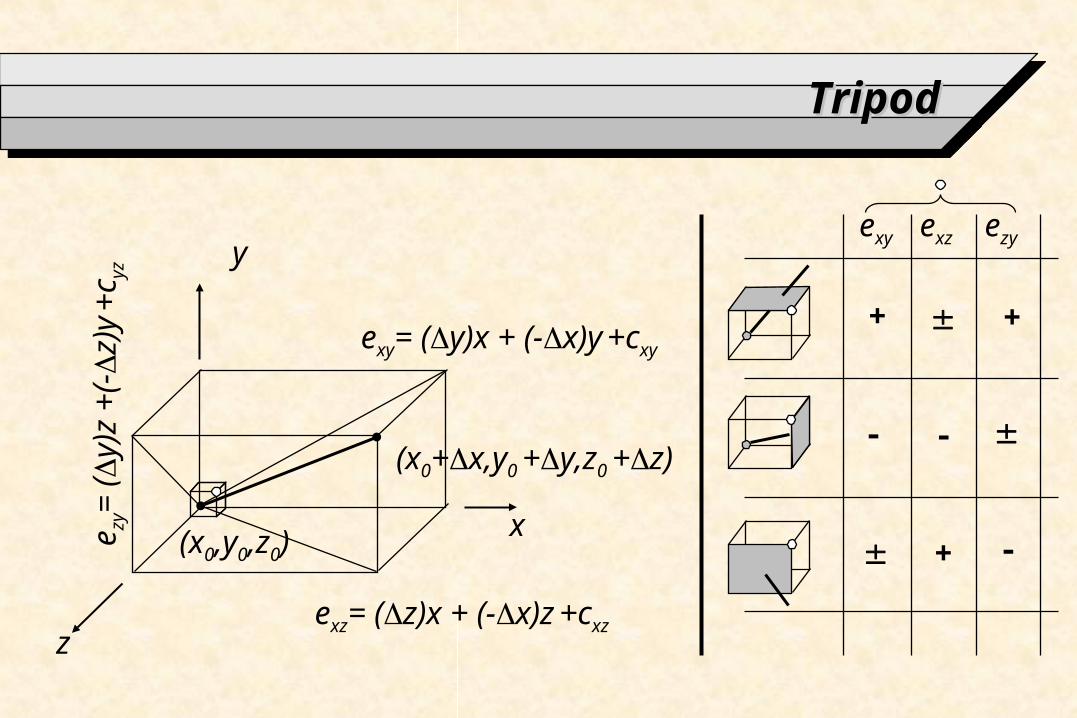
TripodTripod
(x0,y0,z0)
y
x
z
(x0+x,y0 +y,z0 +z)
exy= (y)x + (-x)y +cxy
e zy=
(y
)z +
(-z
)y +
c yz
exz= (z)x + (-x)z +cxz
exy exz ezy
+
-
+
-
+
-
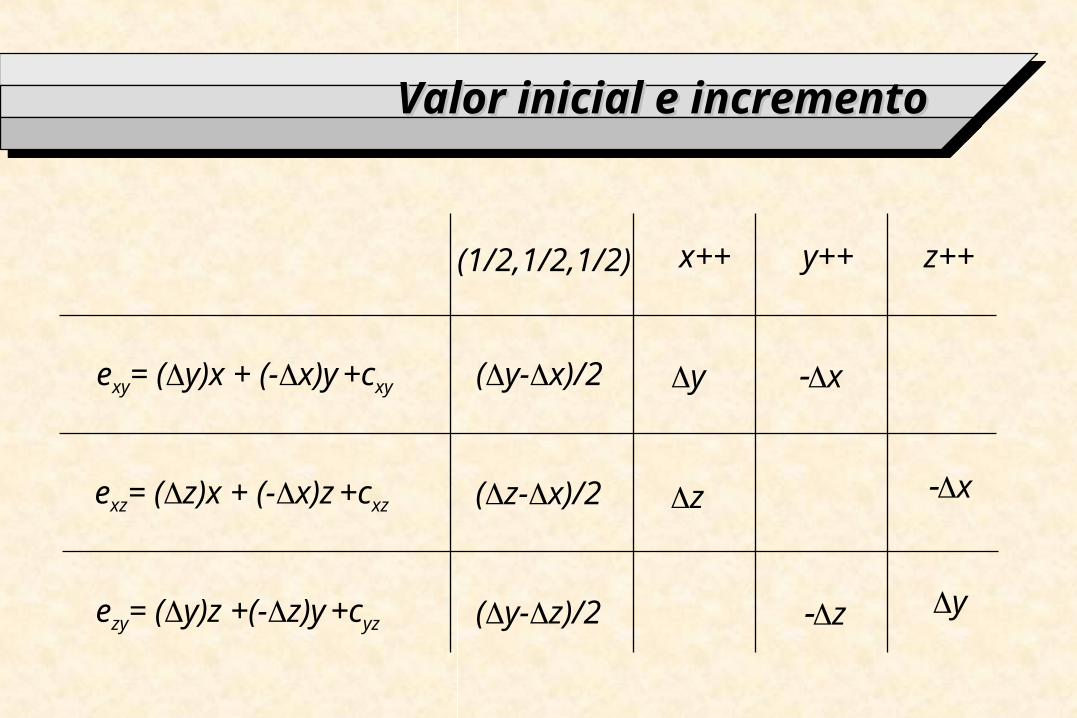
Valor inicial e incremento Valor inicial e incremento
exy= (y)x + (-x)y +cxy
ezy= (y)z +(-z)y +cyz
exz= (z)x + (-x)z +cxz
(1/2,1/2,1/2)
(y-x)/2
(z-x)/2
(y-z)/2
x++
y
z
y++
x
z
z++
x
y
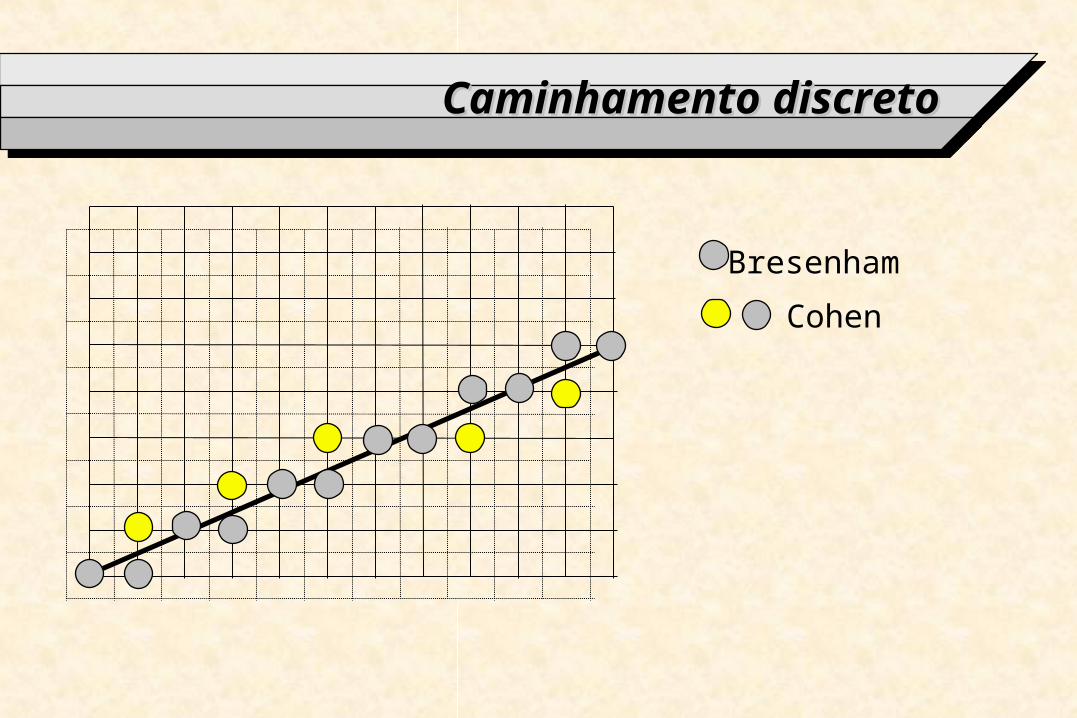
Caminhamento discretoCaminhamento discreto
Bresenham
Cohen

Efeito da amostragem Efeito da amostragem
Bresenham Tripod

Partição celularPartição celular
Plan
o da
imag
em
Volumede dados
Partição
Voxel uma amostra no meio da partição
marcador da partição
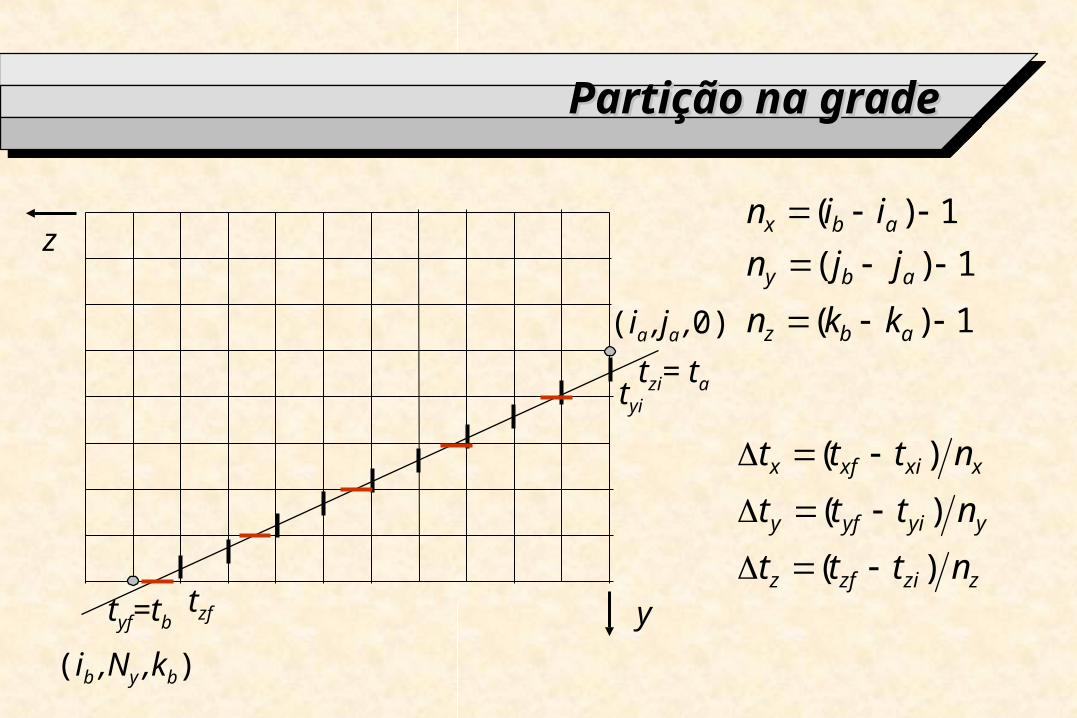
Partição na gradePartição na grade
tzi= ta
tyf=tb y
z
tyi
tzf
(ia ,ja ,0)
(ib ,Ny ,kb)
1)(
1)(
1)(
abz
aby
abx
kkn
jjn
iin
zzizfz
yyiyfy
xxixfx
nttt
nttt
nttt
)(
)(
)(
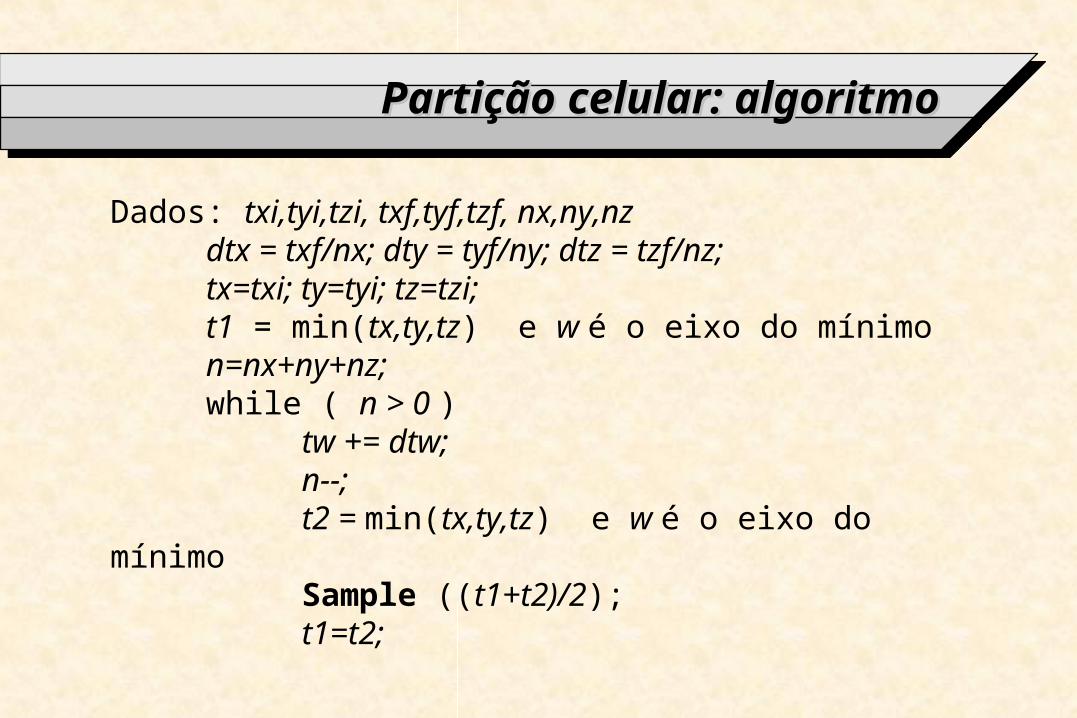
Partição celular: algoritmoPartição celular: algoritmo
Dados: txi,tyi,tzi, txf,tyf,tzf, nx,ny,nzdtx = txf/nx; dty = tyf/ny; dtz = tzf/nz; tx=txi; ty=tyi; tz=tzi; t1 = min(tx,ty,tz) e w é o eixo do mínimon=nx+ny+nz; while ( n > 0 )
tw += dtw; n--;t2 = min(tx,ty,tz) e w é o eixo do mínimoSample ((t1+t2)/2);t1=t2;
Otimizações Otimizações
Velocidade– Refinamento progressivo– Terminação adaptativa do raio– Estruturas Hieráquicas
Qualidade da imagem– aumento do número de amostra no raio– lançamento de mais raios– melhora esquema de interpolação
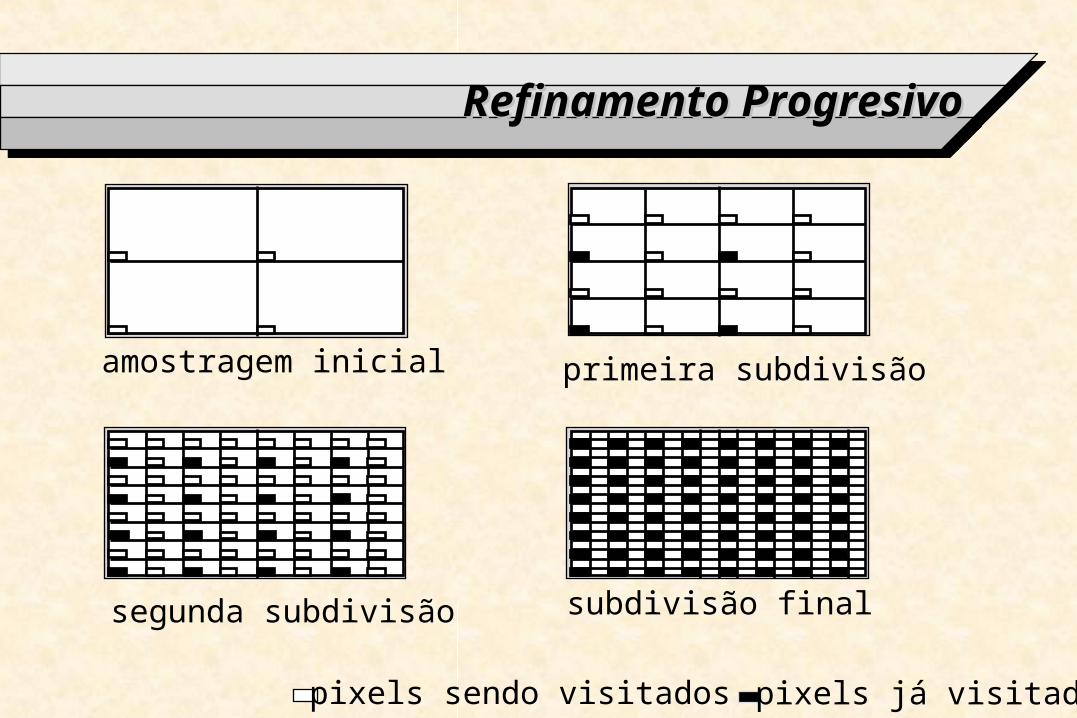
Refinamento ProgresivoRefinamento Progresivo
subdivisão finalsegunda subdivisão
primeira subdivisãoamostragem inicial
pixels sendo visitados pixels já visitados

Refinamento Progressivo: ExemploRefinamento Progressivo: Exemplo
256x256128x12864x6432x32
16x168x84x42x2

Algoritmo Algoritmo Ray CastingRay Casting
Alto custo computacional Apresenta todo o conjunto de dados Facilmente paralelizável Utilizado quando se deseja imagens de
alta qualidade [Elvins,1992]
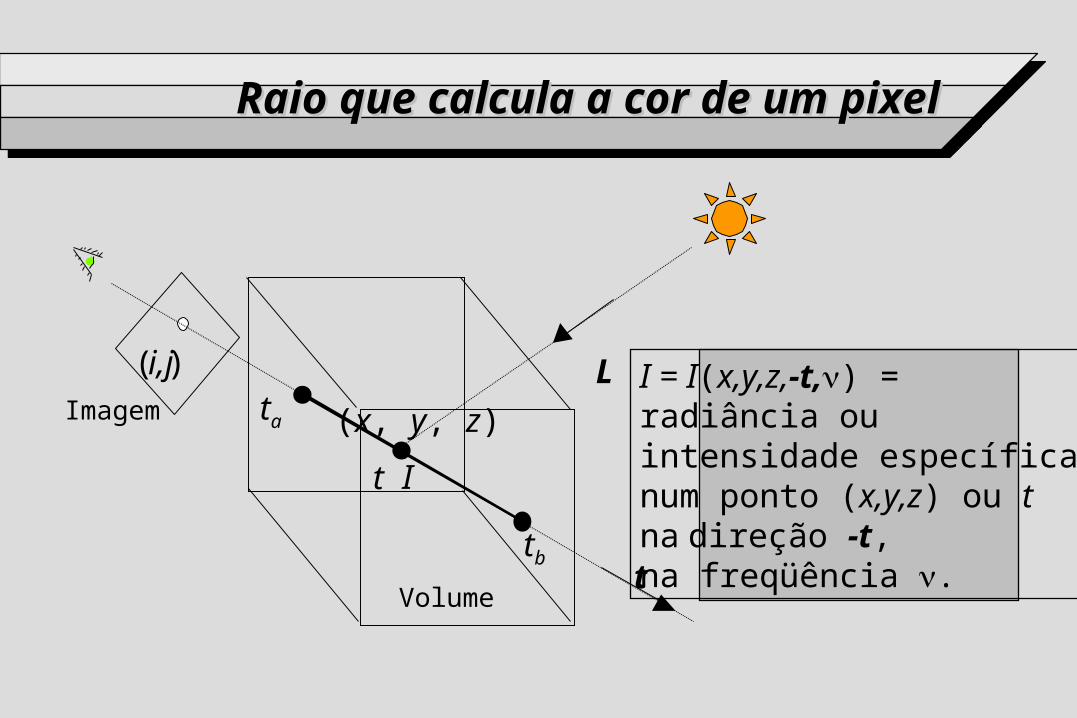
Raio que calcula a cor de um pixelRaio que calcula a cor de um pixel
t
Lta
tb
t
(x, y, z)
(i,j)Imagem
Volume
I = I(x,y,z,-t,) = radiância ou intensidade específicanum ponto (x,y,z) ou tna direção -t, na freqüência .
I
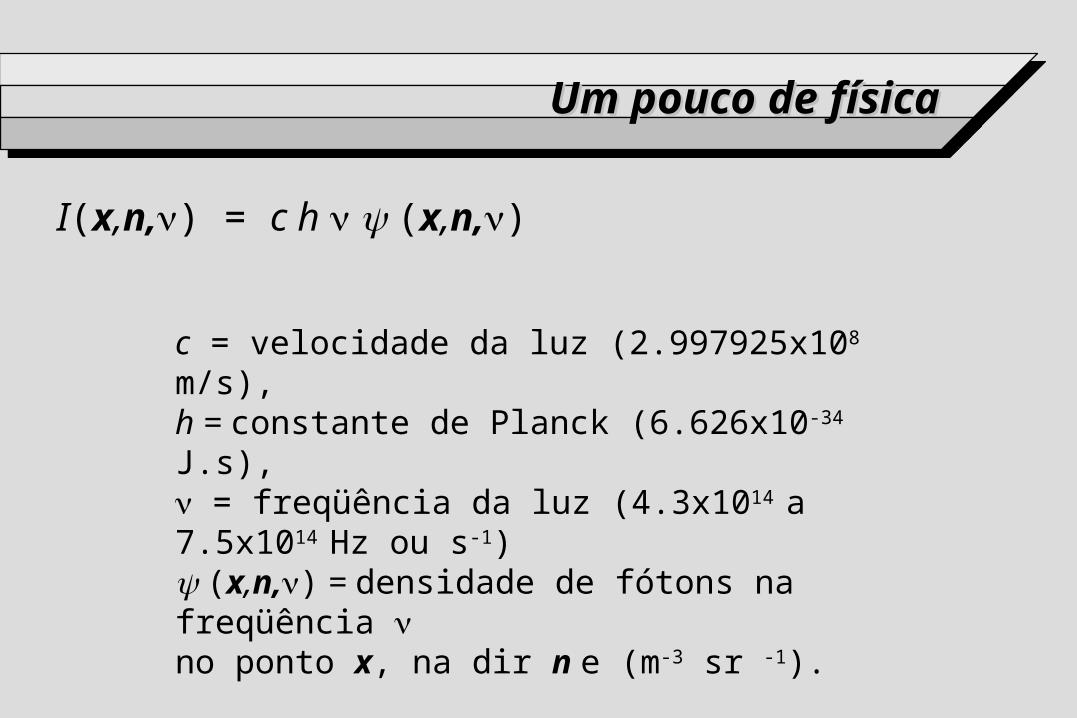
Um pouco de físicaUm pouco de física
c = velocidade da luz (2.997925x108 m/s),h = constante de Planck (6.626x10-34 J.s), = freqüência da luz (4.3x1014 a 7.5x1014 Hz ou s-1) (x,n,) = densidade de fótons na freqüência no ponto x, na dir n e (m-3 sr -1).
Unidade de I = J/s m-2 sr-1 = W/m2 sr
I(x,n,) = c h (x,n,)

Modelo de absorçãoModelo de absorção
n = número de partículas
a = área das partículas = R2
= densidade = n/vol= n/(As s)
t
atdss
etItctIsds
tdI )(
)()()()()(
I
As s
I-
)()(
),()()()()())((
)()(
sas
tIsstIsastIA
asAstI
A
natI
s
s
s

Aproximação para cor de um pixelAproximação para cor de um pixel
b
a
t
at
b
a
t
t
p
dss
p
t
t
ji dtAtetIdtAttcC )(
, )()(
Lta
tb
t(x, y, z)
(i, j)
Imagem
Volume
Ap
Um modelo simples para determinação da cor de um pixel considera todos os fótons emitidos em sua direção no volume correspondente a seu raio, ou seja:
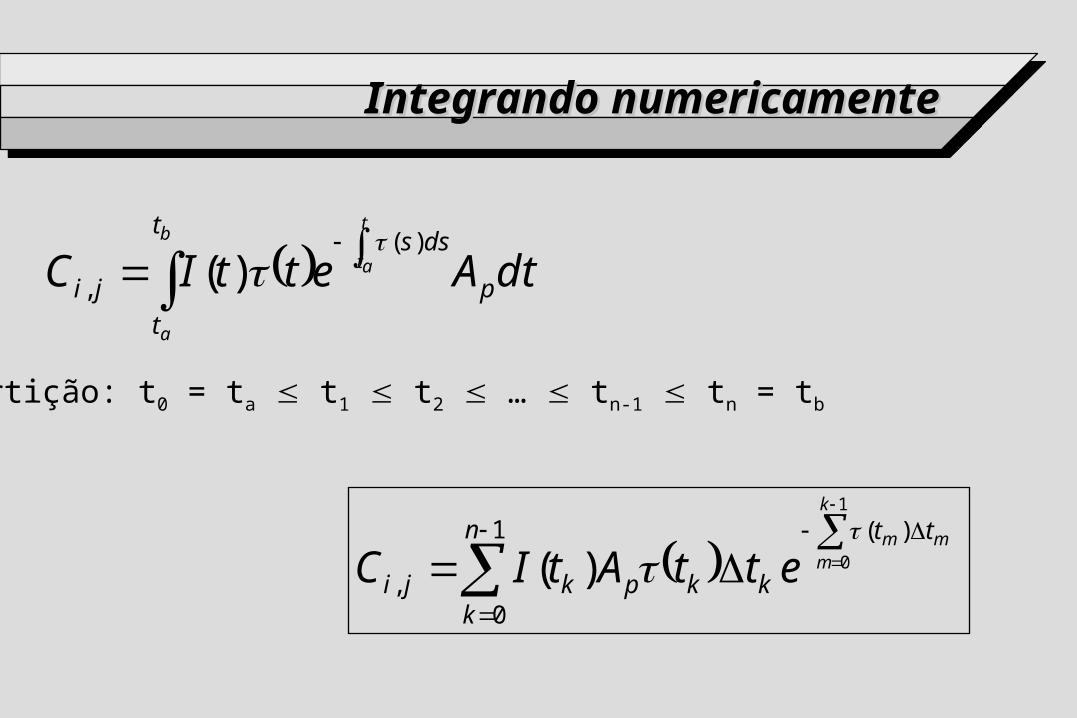
Integrando numericamenteIntegrando numericamente
Partição: t0 = ta t1 t2 … tn-1 tn = tb
1
0
)(
,
1
0)(n
k
tt
kkpkji
k
mmm
ettAtIC
b
a
t
at
t
t
p
dss
ji dtAettIC)(
, )(

Estimando a contribuição da partiçãoEstimando a contribuição da partição
kkkkpk CttAtI )(
1
0
1
0
1
0
)(
,
1
0)(n
k
n
k
k
mkk
tt
kkpkjim
k
mmm
eCettAtIC
Ck= intensidade refletida da fonte na partição k através da área Ap
k = (tk) tk= opacidade (núm. de partículas) da partição k

Shading Shading pelo modelo de Phongpelo modelo de Phong
luz
nsdifluzambk VRkLNkCCC )(
N
R
V
Ltk
t
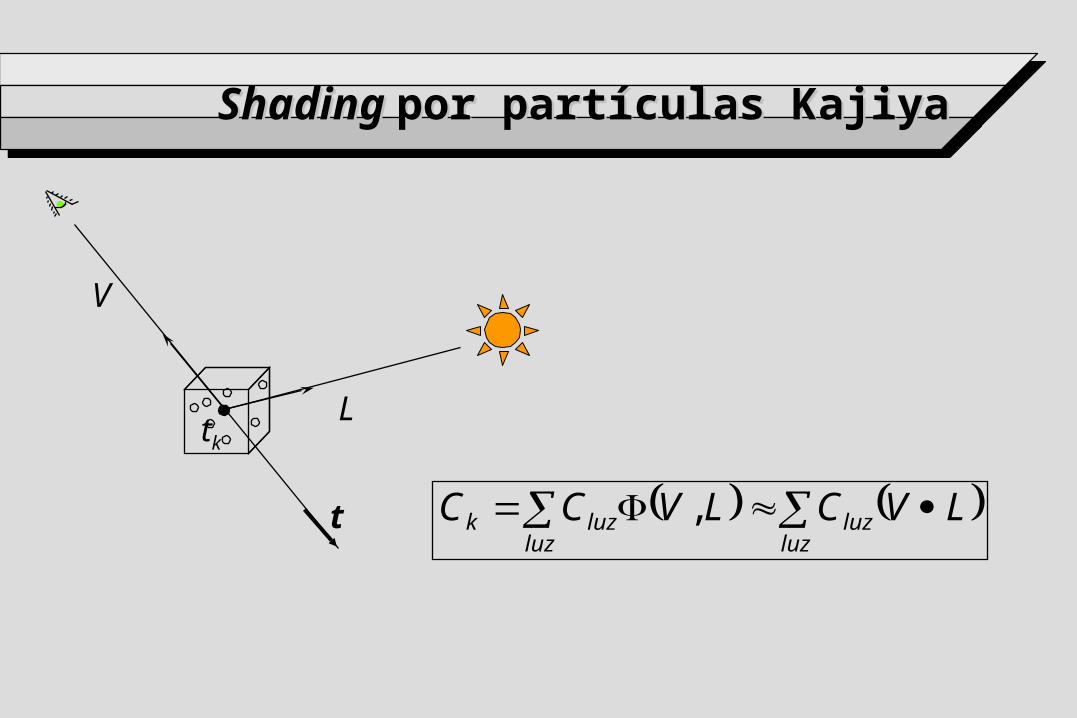
Shading Shading por partículas Kajiyapor partículas Kajiya
luz
luzluz
luzk LVCLVCC ,
V
Ltk
t
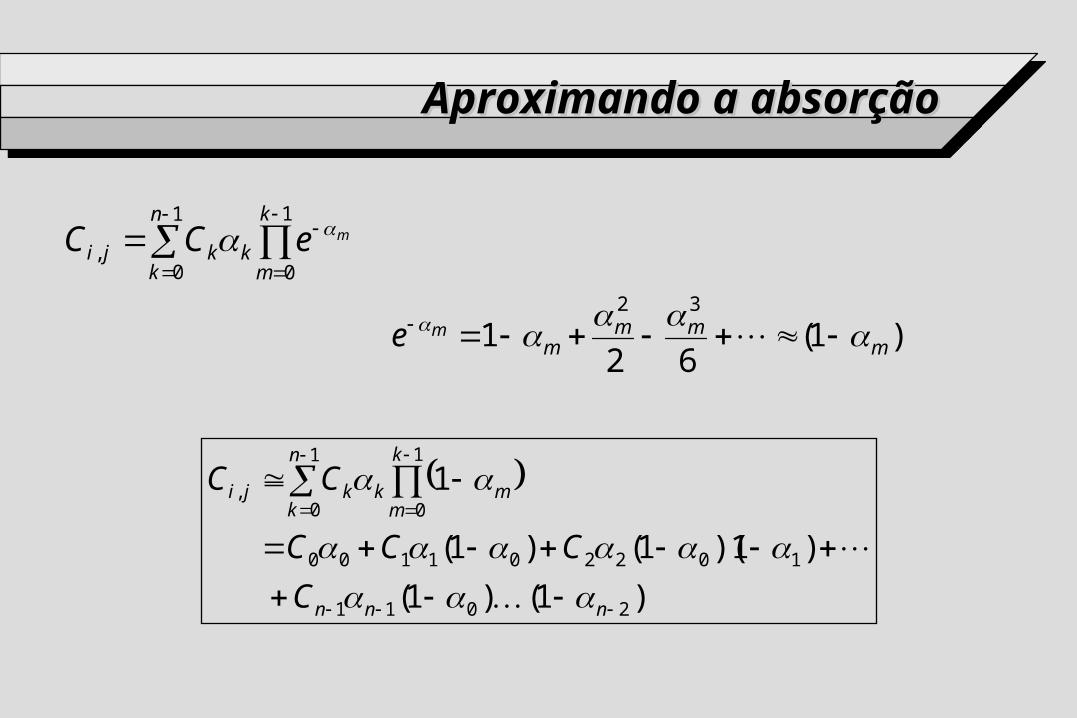
Aproximando a absorçãoAproximando a absorção
1
0
1
0,
n
k
k
mkkji
meCC
)1()1(
)1)(1()1(
1
2011
102201100
1
0
1
0,
nnn
k
mm
n
kkkji
C
CCC
CC
)1(62
132
mmm
mme

Compondo de trás para a frenteCompondo de trás para a frente
))))1()(1()(1(((
)1()1()1)(1()1(
11222111000
2011102201100,
nnn
nnnji
CCCC
CCCCC
cor = c[n-1]*alfa[n-1];for (i=n-2; i>=0; i--) {
cor = c[i]*alfa[i]+(1-alfa[i])*cor;}

Operadores do OpenGL Operadores do OpenGL
)1( srcdstsrcsrcout CCC
glBlendFunc(GL SRC ALPHA, GL ONE MINUS SRC ALPHA)
cor = c[n-1]*alfa[n-1];for (i=n-2; i>=0; i--) {
cor = c[i]*alfa[i]+cor*(1-alfa[i]);}

Compondo de frente para atrás Compondo de frente para atrás
cor = c[0]*alfa[0];trp = 1- alfa[0];for (i=1; i<n && trp>tol; i++) {
cor += trp*(c[i]*alfa[i]);trp *= (1-alfa[i]);}
)1()1(
)1)(1()1(
2011
102201100,
nnn
ji
C
CCCC
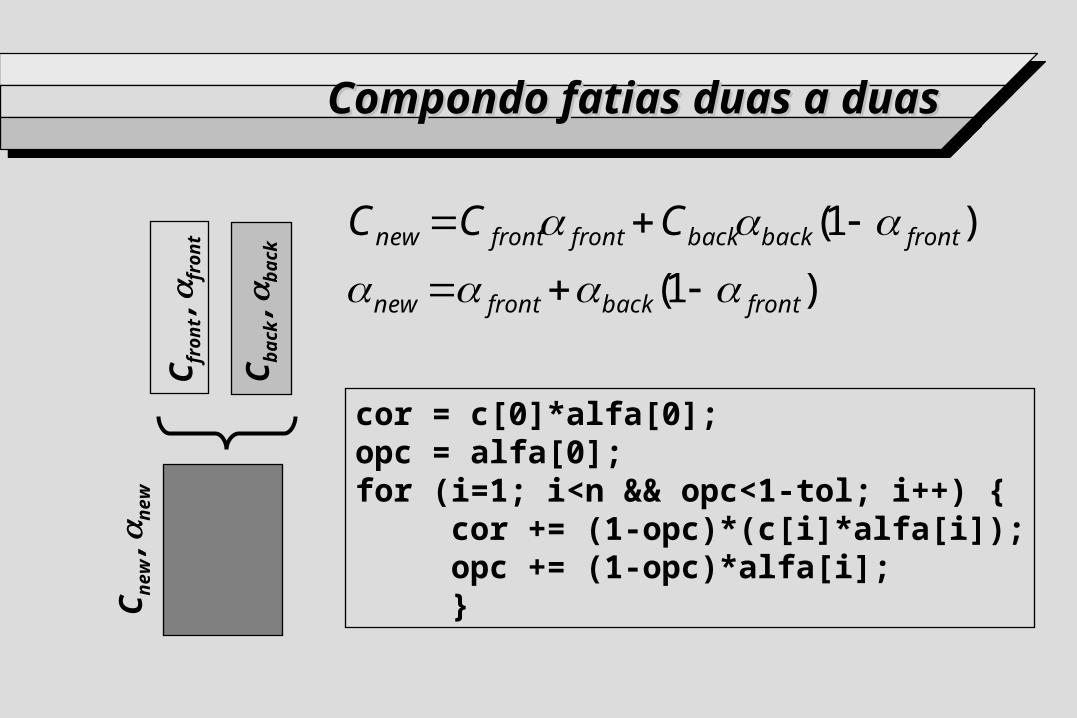
Compondo fatias duas a duasCompondo fatias duas a duas
Cba
ck ,
back
Cfr
ont ,
fr
ont
Cn
ew ,
new
)1(
)1(
frontbackfrontnew
frontbackbackfrontfrontnew CCC
cor = c[0]*alfa[0];opc = alfa[0];for (i=1; i<n && opc<1-tol; i++) {
cor += (1-opc)*(c[i]*alfa[i]);opc += (1-opc)*alfa[i];}
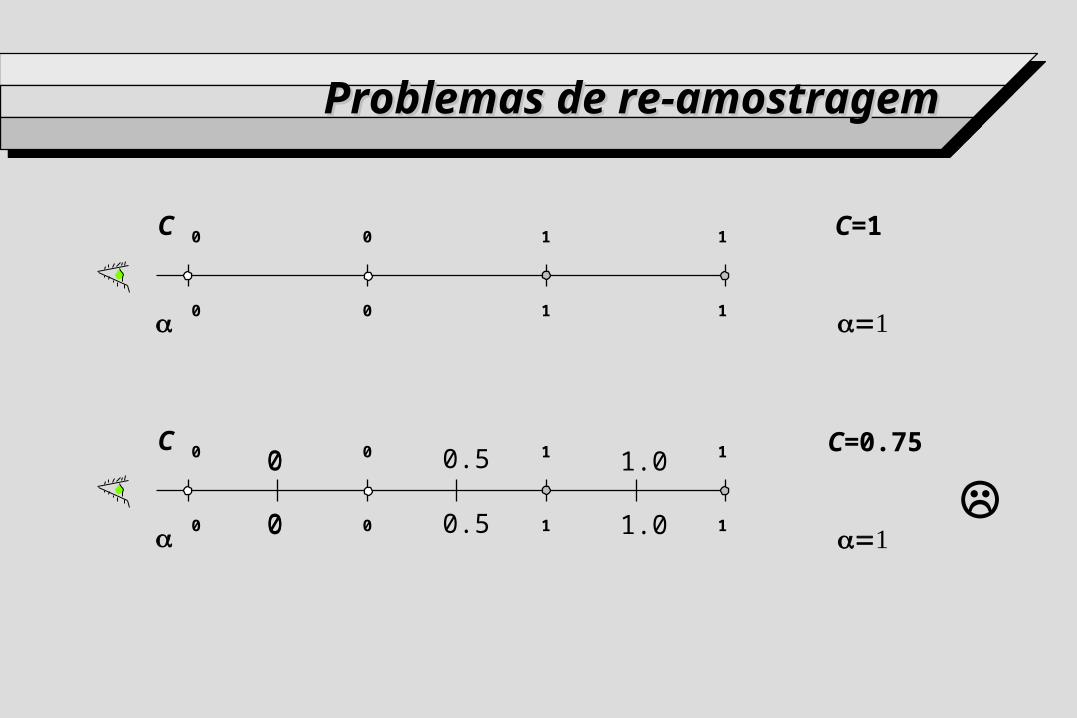
Problemas de re-amostragemProblemas de re-amostragem
C
00 11
00 11
C
00 11
00 11
0
0 0.5
0.50
0
1.0
1.0
C=1
C=0.75
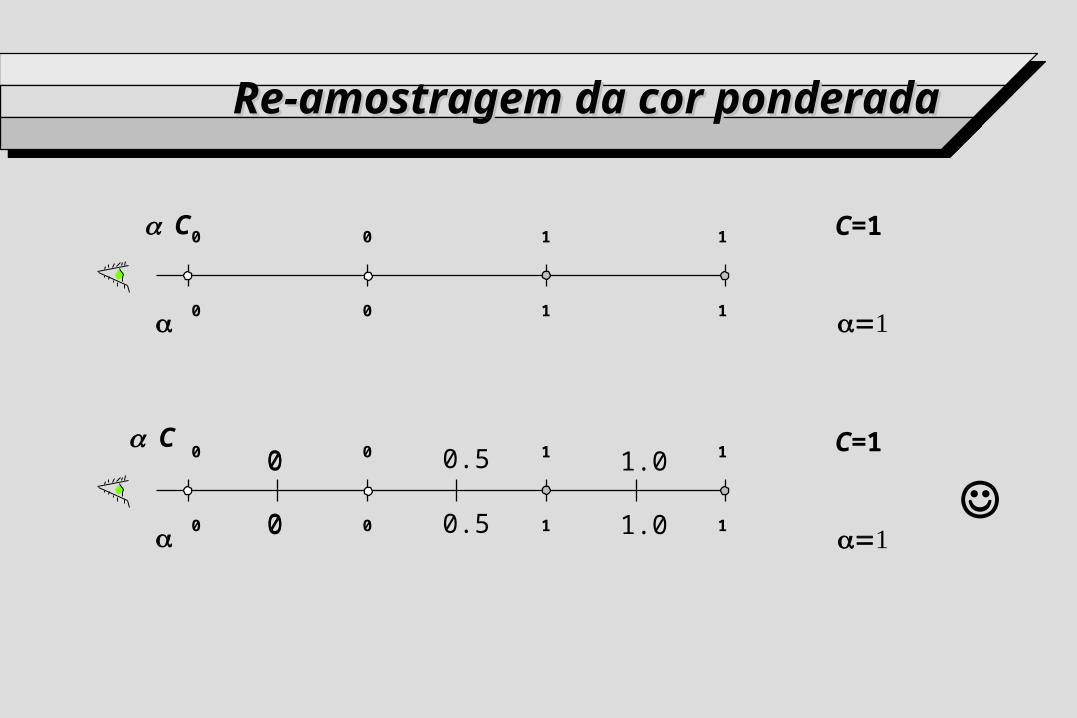
Re-amostragem da cor ponderadaRe-amostragem da cor ponderada
C
00 11
00 11
00 11
00 11
0
0 0.5
0.50
0
1.0
1.0
C=1
C=1
C
Splatting (Splatting (Westover,1990) Westover,1990)
projeção de voxel equivale a atirar uma bola de neve num prato de vidro–contribuição da neve decresce com distância ao
centro–região de influência de voxel no espaço da
imagem é constante, a menos de uma translação

SplattingSplatting
Algoritmo:–transformação: ordem para percorrer o volume–iluminação: modelo local–reconstrução: determina a porção da imagem influenciada por cada voxel
–determinação da visibilidade: compõe as contribuições acumuladas em um buffer
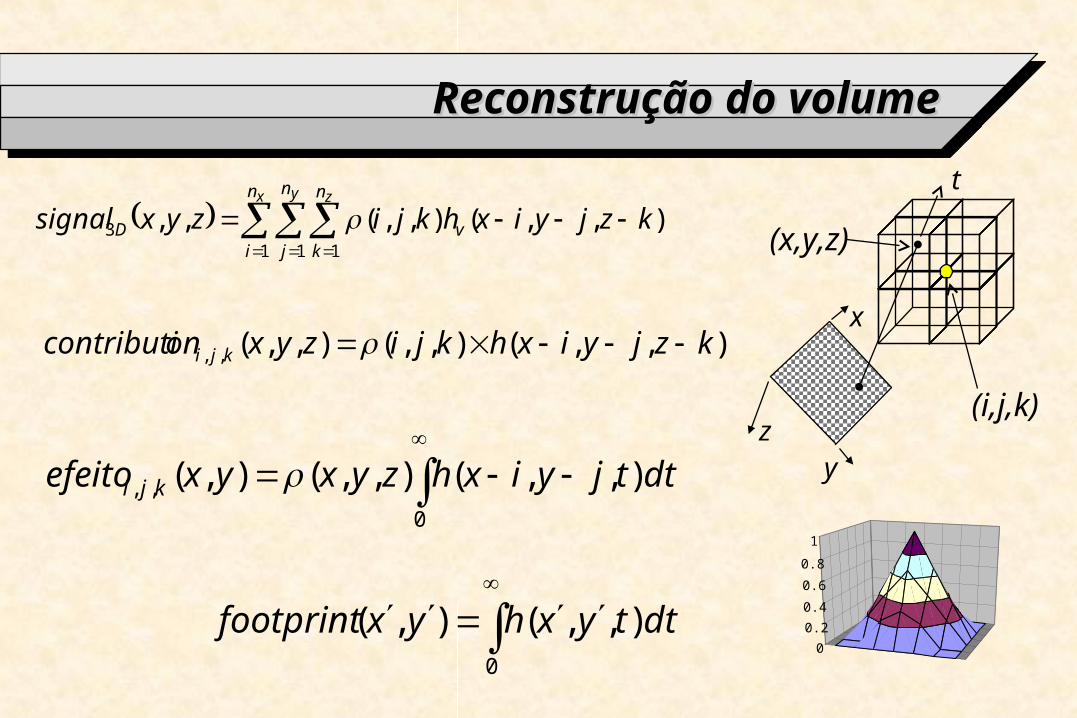
Reconstrução do volumeReconstrução do volume
),,(),,(,,1 1 1
3 kzjyixhkjizyxsignalx y zn
i
n
j
n
kvD
x
yz
(i,j,k)
(x,y,z)
0
,, ),,(),,(),( dttjyixhzyxyxefeito kji
0
),,(),( dttyxhyxfootprint
t
0
0.2
0.4
0.6
0.8
1
),,(),,(),,(,, kzjyixhkjizyxoncontributi kji

FootprintFootprint
footprint
centro da projeção

Grade de espaçamentos diferentesGrade de espaçamentos diferentes
T-1
T-1(x)=x’z
y
x
x’x
Sy
Sx

Shear-Warp (Lacroute, 1995)Shear-Warp (Lacroute, 1995)
1. shear &resample
voxelscanline
2. project& composite
intermediateimage scanline
3. warp &resample
intermediateimage
finalimage

EsquemaEsquema
viewing rays
volume slices
image plane
Mview = Mwarp2D * Mshear3D
shear
warp
viewing rays
image plane
shear
project
intermediate image plane
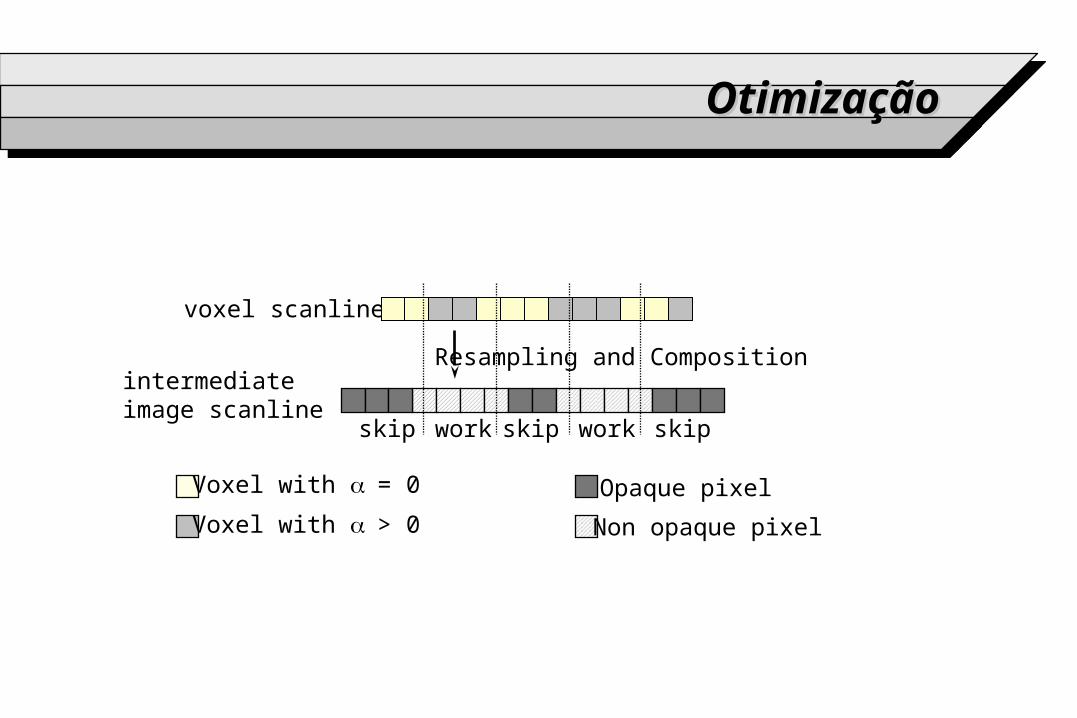
OtimizaçãoOtimização
voxel scanline
intermediateimage scanline
Resampling and Composition
Voxel with = 0
Voxel with > 0
Opaque pixel
Non opaque pixel
skip work skip work skip
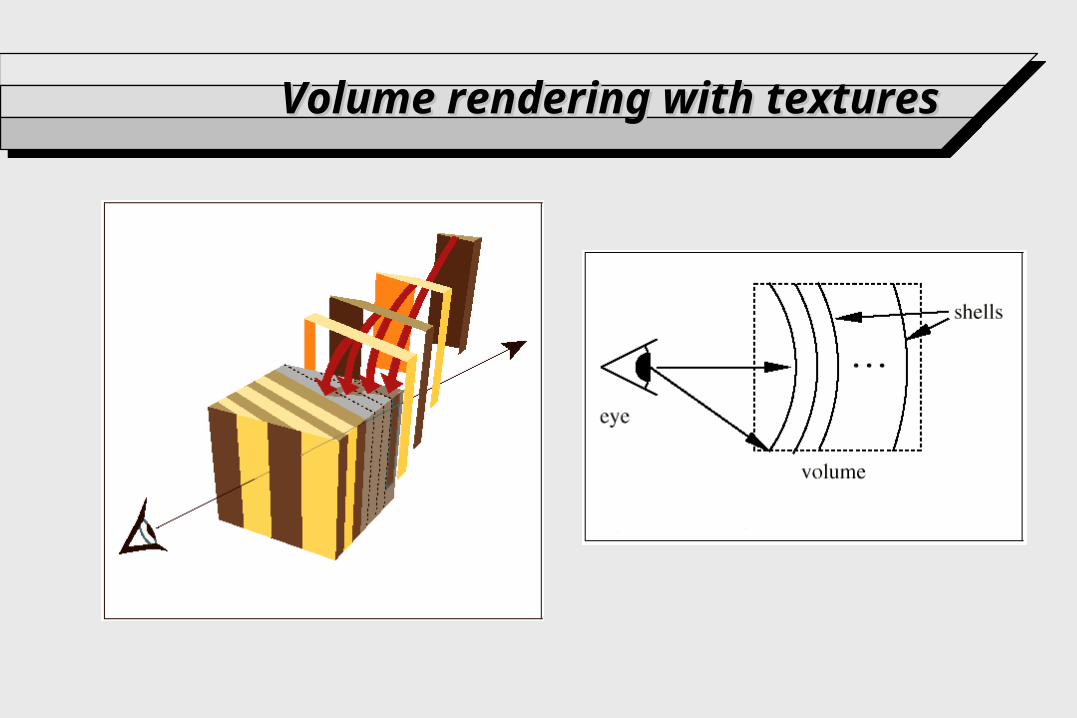
Volume rendering with texturesVolume rendering with textures
3D texture volume rendering3D texture volume rendering
Load the volume data into a 3D texture. This processing is done once for a particular data volume.
Choose the number of slices. Usually this matches the texel dimensions of the volume data cube.
Find the desired viewpoint and view direction Compute a series of polygons that cut through the data
perpendicular to the direction of view. Use texture coordinate generation to texture the slice properly with respect to the 3D texture data.
Use the texture transform matrix to set the desired orientation the textured images on the slices.
Render each slice as a textured polygon, from back to front. As the viewpoint and direction of view changes, recompute the data
slice positions and update the texture transformation matrix as necessary.
2D texture volume rendering2D texture volume rendering
Generate the three sets of 2D textures from the volume data. Each set of 2D textures is oriented perpendicular to one of volume’s major axes. This processing is done once for a particular data volume.
Choose the number of slices. Usually this matches the texel dimensions of the volume data cube.
Find the desired viewpoint and view direction. Find the set of 2D textures most perpendicular to the direction of view.
Generate data slice polygons parallel to the 2D texture set chosen. Use texture coordinate generation to texture each slice properly with respect to its corre-sponding 2D texture in the texture set.
Use the texture transform matrix to set the desired orientation the textured images on the slices.
Render each slice as a textured polygon, from back to front. A blend operation is performed at each slice; the type of blend depends on the desired effect.
As the viewpoint and direction of view changes, recompute the data slice positions and update the texture transformation matrix as necessary. Always orient the data slices to the 2D texture set that is most closely aligned with it.





























