1
An Inheritance-Based Technique for Building Simulation Proofs
Incrementally
Idit Keidar, Roger Khazan, Nancy Lynch, Alex Shvartsman
MIT Lab for Computer Science
Theory of Distributed Systems Group
2
State of the Art Software Engineering
• Managing complexity of software systems– Modularity: interacting system components– Incremental techniques: OO, inheritance
• Formal modeling and verification– Modularity: compositional theorems– Incremental techniques: lag behind Limited scalability Not sufficiently cost-effective
3
Our Work:Scalable Formal Methods
• Provide incremental techniques for– Specifying systems– Modeling systems– Reusing formal proofs about systems
• Evolved as part of our experience modeling complex group communication service– Middleware with intricate semantics– Implemented in C++– [Keidar, Khazan, ICDCS 2000]

4
Talk OutlineMotivation: need formal framework for incremental
proofs• The approach, in a nutshell• Background: specifications, simulation proofs• The challenge: reuse simulation proofs• The solution
– Modification constructs
– Proof reuse theorem
• Experience using the technique• Summary

5
Our Approach,in a Nutshell

6
The Idea
OOSWE
Techniques
Formal Modelingand Verification
Techniques
Incremental Specification, Modeling, and Proof Reuse
Techniques

7
Inheritance• Incremental modification of components• Many different kinds. We consider: 1 Specialization (sub-typing, substitution)
– Child constraints parent behavior– E.g., Parent is unordered messaging protocol;
Child specializes Parent to ordered messaging
2 Interface extension – Together with specialization allows new
behavior, but does not override parent behavior (“sub-classing for extension”)

8
Inheritance in Spec and Proofs
SpecificationS
SystemA
Implements
SpecificationS’
parent
SystemA’
parent
?!Prove that A’ implements S’ by relying on proof that A implements S, but without repeating reasoning of that proof.

9
Background:Specifications and Proofs
10
Specifying and Modeling System
• Abstract state machines [Lampson; Schneider ’93]
– States (named variables)
– Actions
– Specify in which states each action is enabled and how it modifies state
– Some actions are externally observable
– State is not externally observable
• Execution: “state, action, state, action, …”• Defined behavior: all possible sequences of
externally observable actions Traces

11
Example -- Monotonic SequenceSpecification UpSeqState: Integer last, init anyActions:
print(x) pre: x last
eff: last:= x
• Sample Traces: – 1, 3, 4, …– -10, -5, 1, 2, 3, 5, 8, 13, …

12
What “Implements” Means?
• System A implements specification S if every trace of A is a trace of S
“Implements” “trace inclusion”
• A is indistinguishable from S by looking only at A’s traces

13
Example -- Fib SequenceSystem FibSeqState: Integer n=0,m=1Actions:
print(x) pre: x == n + m
eff: n := mm := x
• Trace: 1, 2, 3, 5, 8, 13, …– is also trace of monotonic sequence UpSeq

14
Proving that A Implements S
• Simulation mapping / abstraction function F : {the states of A} {the states of S}F maps initial states of A to initial states of SFor every action of A and for every state t,
if (t, , t’) is a step of A then there is a sequence of actions of S
thatstarts in F(t), ends in F(t’), and has the same trace as .
• Simulation Mapping Trace Inclusion
15
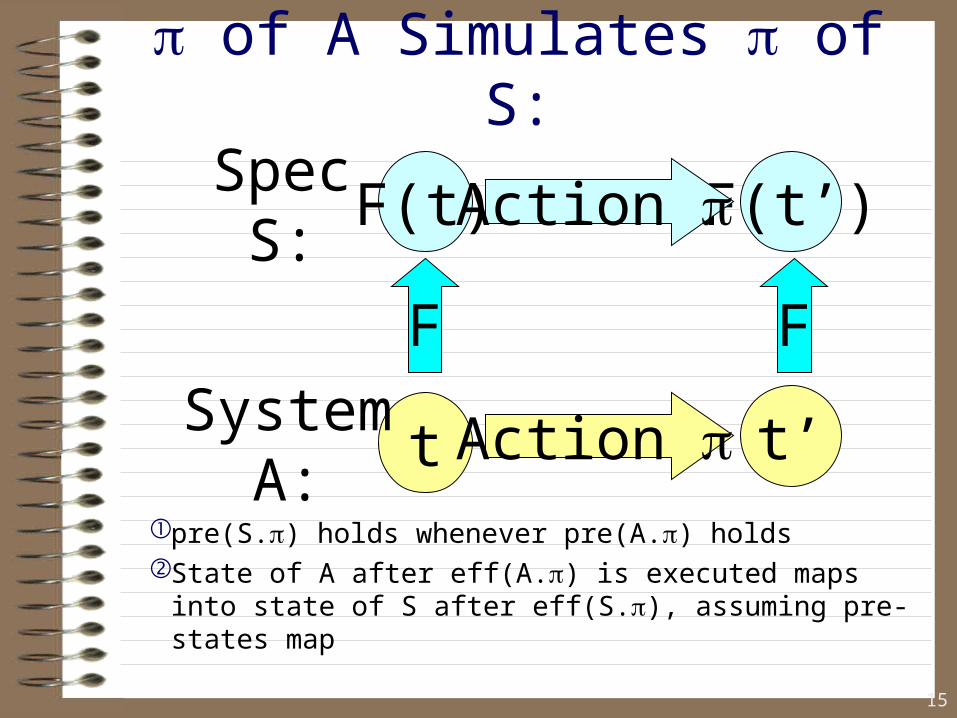
F(t) F(t’)Action
F F
t t’Action
SpecS:
SystemA:
pre(S.) holds whenever pre(A.) holdsState of A after eff(A.) is executed maps into
state of S after eff(S.), assuming pre-states map
of A Simulates of S:

16
FibSeq Implements UpSeq
UpSeq.print(x)pre: xlasteff: last:=x
FibSeq.print(x)pre: x==n+meff: n:=m
m:=x
last:=mF
For simulation proof, need to show: pre(FibSeq.print(x))pre(UpSeq.print(x)) (x=n+m)(xlast=m); relies on n0 last still equals m in post-state

17
Simulation Proofs -- Benefits
• Complete [e.g., Abadi and Lamport ‘93]
– Any finite trace inclusion can be shown
• Tractable– Inductive reasoning– Reason about single steps, not about executions
• Verifiable by humans and/or machines

18
The Challenge:Reuse of Simulation Proofs

19
Our Proof Reuse GoalSpecification
S
SpecificationS’
SystemA
SystemA’
Simulates
Parent Parent
?!
A formal framework – for proving that A’ simulates S’
– without repeating parent’s proof.
20
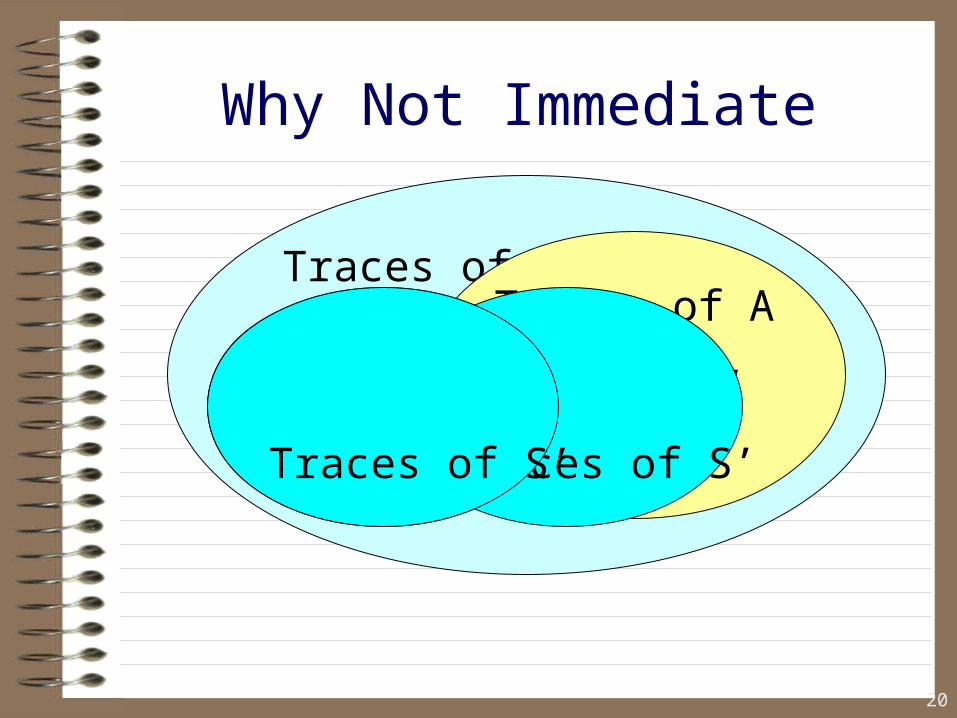
Why Not Immediate
Traces of STraces of A
Traces of A’
Traces of S’Traces of S’Traces of S’

21
The Solution:Formal Framework for
Incremental Specifications and Simulation Proofs

22
What We Did
• Specialization and interface extensionfor specifying and modeling systems
• “Proof Reuse” Theorem– Defines simulation between children– Reuses and extends simulation between parents– Requires proving conditions about extension– Involves reasoning only about modifications

23
Specialization Construct
• In precondition-effect notation, child can– Introduce new state variables– Restrict parent actions with new preconditions– Add new effects that modify new variables only
A’ = specialize(A)(NewVars, ActionRestriction)
• Child may only restrict parent behavior

24
Recall: Monotonic SequenceSpecification UpSeqState: Integer last, init anyActions:
print(x) pre: x last
eff: last:= x
• Sample Traces: – 1, 3, 4, …– -10, -5, 1, 2, 3, 5, 8, 13, …

25
Specialization of UpSeq: Accelerating Sequence, “Guiness”Specification GnSeqspecializes UpSeq
New State: Integer diff, init any
Action Restriction:print(x) new pre: x-last diff new eff: diff:= x-last
• Sample Trace: 1, 2, 3, 5, 8, 13, …– also trace of UpSeq

26
Using “Proof Reuse” Theorem• In order to show simulation from A’ to S’:
• Extend simulation mapping F from A to S with mapping F’from states of A’ to new variables of S’
• Reason only about how S’ restricts S:1. new preconditions are enabled; and2. mapping F’ is preserved after new effects occur
Allows to reuse F and simulation proof of F

27
Example
UpSeq
GnSeq
FibSeqSimulates
Specializes
F
FibSeq?!F’

28
FibSeq Implements GnSeq
UpSeq.print(x) pre: xlast
eff: last:=x
FibSeq.print(x)pre: x==n+meff: n:=m
m:=x
GnSeq.print(x)
pre: x-lastdiff eff: diff:=x-last
last:=mdiff:=m-n
For simulation proof, need to show : pre(FibSeq.print(x)) newpre(GnSeq.print(x)) (x=n+m)(x-last diff) diff still equals m-n in post-state

29
Experience: Using the Technique
30
Group Communication
• Powerful building blocks for fault tolerant distributed systems
• Reliable multicast to groups• Group membership “who is in the group”• Virtual Synchrony semantics synchronize
messages and membership changes– Processes see events in same order
• Formal specification, modeling, and verification: a challenge

31
Keidar and Khazan, ICDCS 2000
• Modeling a full-fledged group communication service– Specification– Algorithm description, matching C++
implementation (9,000 lines)– Environment specification matching services we
use (developed by other teams): • membership server (20,000 lines)
• reliable communication service (4,000 lines)
– Simulation proof from algorithm to spec

32
Incremental Specification, Algorithm and Proof
• FIFO communication in views– Algorithm: half page– Proof 1: 5 pp., 7 major invariants, history vars
• Virtual Synchrony + Transitional Set– Algorithm modification: full page– Proof 2: 2.5 pp., 1 invariant– Proof 3: 2.5 pp., 3 invariants, prophecy vars
• Self Delivery– Proof 4: 2.5 pp., 3 invariants

33
A Modeling Methodology• Child cannot write to parent data structures
• Sometimes need hooks at parent for potential children to specify policy– Non-determinism at parent– Parent specifies coherence, safety– Like “abstract” or “virtual” methods
• Example: forwarding of messages to others– At parent arbitrary forwarding, but forwarded
messages go into “right” place– Child specifies forwarding policy

34
Benefits of Reuse
• Present complex algorithm step by step– Easy to see which part of algorithm
corresponds to which part of spec– Efficient: re-use of data structures (as opposed
to compositional layered approach)
• Manageable proof – Focus attention on specific property– No need to re-prove that previous proof
preserves (contrast with layers)

35
Summary of Contributions• Formal framework for incremental
development of specs & simulation proofs• Child simulation proof may reuse parent
proof – involves reasoning only about modified parts
• Successfully used to model and validate complex communication system [ICDCS 00]
• Formalism extends IOA programming and modeling language [Garland&Lynch]
• Suitable for other state-machine models

36
The End