On comparison of different approaches to the stability radius calculation Olga Karelkina Department of Mathematics University of Turku MCDM 2011

On comparison of different approaches to the stability radius calculation Olga Karelkina Department of Mathematics University of Turku MCDM 2011.
Dec 27, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

On comparison of different approaches to the stability radius calculation
Olga KarelkinaDepartment of MathematicsUniversity of Turku
MCDM 2011

Slide 2 of 25
Outline
PreliminariesProblem statementExact method for calculation stability
radius proposed by Chakravarti and WagelmansNSGA-II adaptation for calculation stability
radiusIllustration and comparison of two
approaches

Slide 3 of 25
Two major directions of investigation can be single out
quantitative
•bounds for feasible changes in initial data, which preserve some pre-assigned properties of optimal solutions•deriving algorithms for the bounds
calculation
qualitative
•conditions under which the set of optimal solutions of the problem possesses a certain pre-assigned property of invariance to external influence on initial data of the problem

Slide 4 of 25
Shortest path problem (SP)
Given a directed graph and
– a nonnegative cost associated with each edge
G =(V,E),| V| =m | E| =n
cie Ei
Problem: find a directed path from a source node to a distinguished terminal node , with the minimum total cost.
st
The feasible set is the set of all sequences , these sequences are directed paths from to in .
s t G1 ki iP =(e ,…,e )
Slide 5 of 25
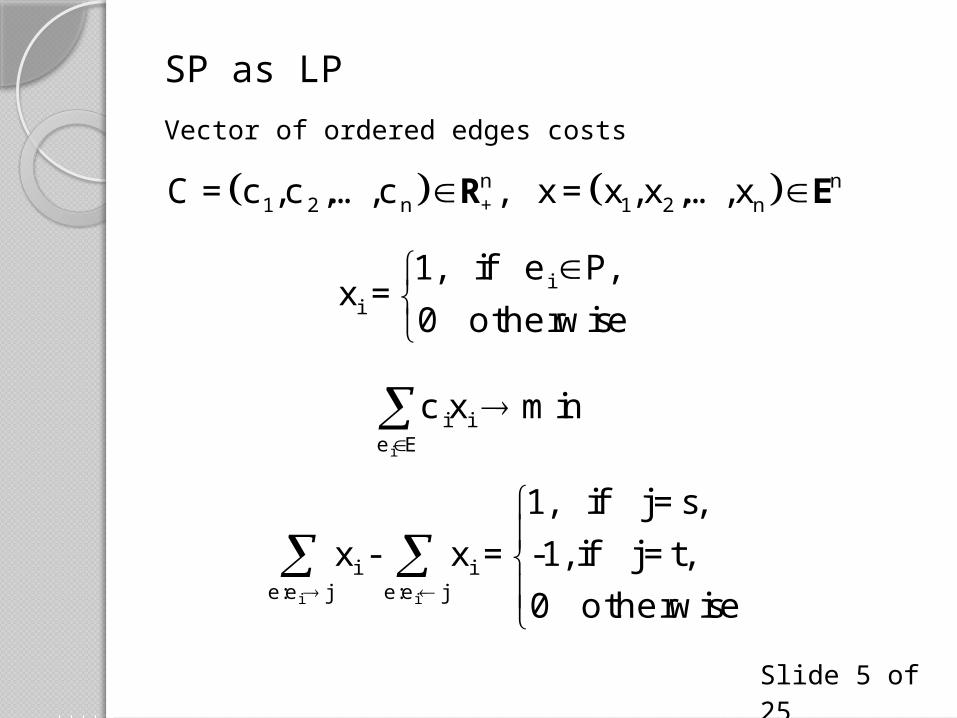
SP as LP
Vector of ordered edges costs
n n1 2 n + 1 2 nC = c ,c ,…,c , x= x ,x ,…,xR E
ii
1, if e P,x =
0 otherwise
i
i ie E
c x min
i i
i ie:e j e:e j
1, if j=s,
x - x = -1, if j=t,
0 otherwise
Slide 6 of 25
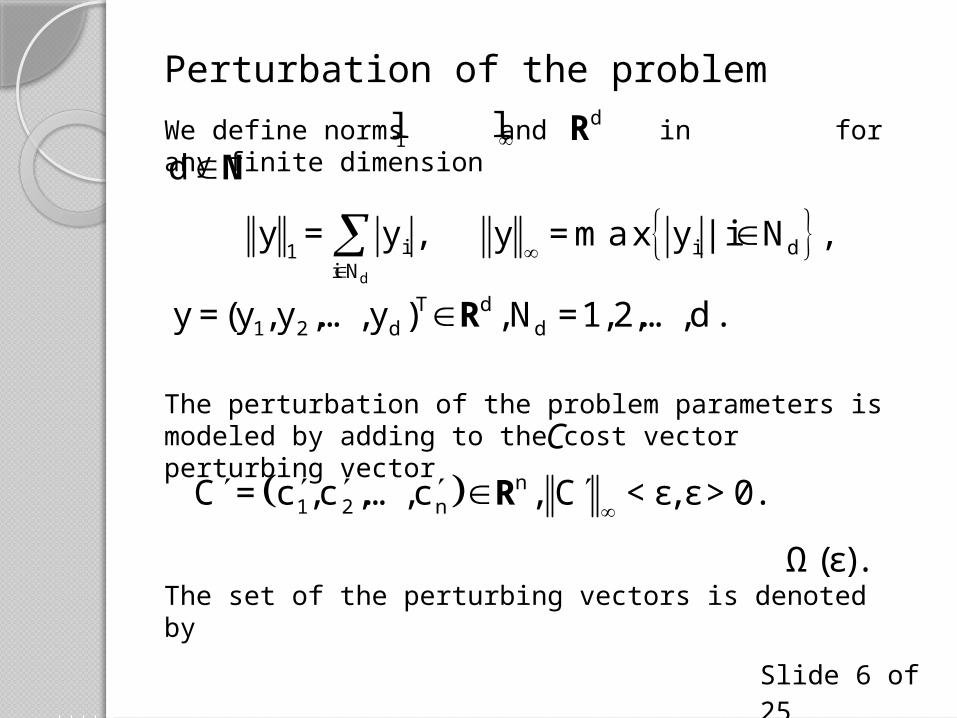
Perturbation of the problem
We define norms and in for any finite dimension
1ldR
d N
d
i1i N
y = y ,
T d1 2 d dy=(y ,y ,…,y ) ,N =1,2,…,d.R
The perturbation of the problem parameters is modeled by adding to the cost vector perturbing vector
The set of the perturbing vectors is denoted by
C
n
1 2 nC = c ,c ,…,c , C <ε,ε>0.R
Ω(ε).
l
i dy =max y | i N ,

Slide 7 of 25
Stability radius
Let be the set of feasible solutions to the shortest path problem
nEX 2
Let be the set of optimal solutions to the shortest path problem with cost vector .
optX (C)C
An optimal solution is called stable if optx X (C)
optε>0 C Ω(ε) x X (C +C ).
supΘ, if Θ ,ρ(x,C)=
0, if Θ = .
Stability radius of an optimal solution
optΘ = ε>0 | C Ω(ε) x X (C +C ) .
optx X (C)

Slide 8 of 25
Stability radius
n
i i ii N
x X\ {x}1
c (x - x)
ρ(x,C)=minx - x
(1)
n n
i i i i i ii N i N
c +c x c +c x , x X
The largest such that forρ i nc ρ, i N
V. A. Emelichev, D.P. Podkopaev, Quantitative stability analysis for vector problems of 0 – 1 programming, Discrete Optimization. 7 (2010) 48 – 63

Slide 9 of 25
Calculating the stability radii of an optimal solution to the linear problem of 0-1 programming
Theorem Let be an optimal solution to (2). The stability radius of is the maximum number satisfying the following inequality :
x XCx min (2
)
xx ρ
n n
i i i i ix X\ xi N i N
min c -ρd x c +ρ x
ii
i
1, if x =0,d =
-1, if x =1.
(3)

Slide 10 of 25
ρρ(x,C) is the maximal satisfying the inequality :
n
i i ii N
x X\ {x}1
C (x - x)
ρ minx - x
From here taking into account
n n
i i i i n
i i i i1i N i N
x - x =x+d x, i N
x - x = x - x = x+d x
we get
n n
i i i i ix X\ xi N i N
min c -ρd x -c +ρ x

Slide 11 of 25
Let us denote
n
i i ix X\ xi N
v ρ = min c -ρd x
v ρ is a continuous, piecewise linear and concave function of ρ
Lemma The number of linear pieces of is v ρ Ο n
D. Gusfield, Parametric combinatorial computing and a problem of program module distribution, J. Assoc. Comput. Mach. 30 (1983) 551 – 563
Slide 12 of 25
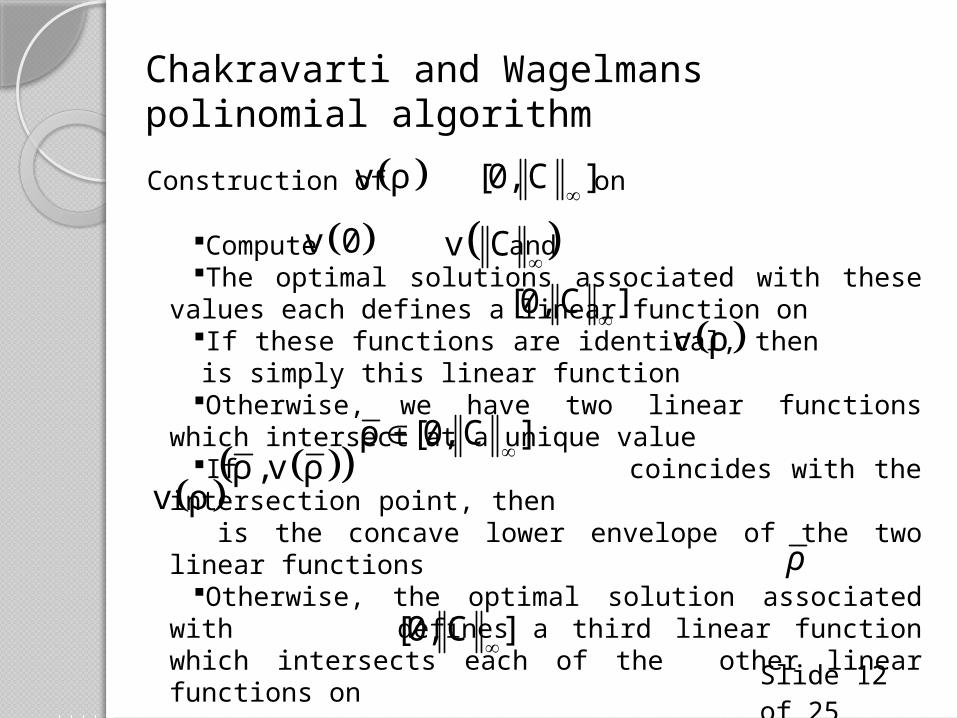
Chakravarti and Wagelmans polinomial algorithm
Construction of on v ρ
[0, C ]
Compute andThe optimal solutions associated with these values
each defines a linear function onIf these functions are identical, then is simply
this linear functionOtherwise, we have two linear functions which
intersect at a unique value If coincides with the intersection point,
then is the concave lower envelope of the two linear functionsOtherwise, the optimal solution associated with
defines a third linear function which intersects each of the other linear functions on
v C
ρ [0, C ]
ρ,v ρ
ρ
v 0
[0, C ]
v ρ
v ρ
[0, C ]

Slide 13 of 25
Chakravarti and Wagelmans polinomial algorithm

Slide 14 of 25
A fast and elitist multi-objective genetic algorithm: NSGA-IIModules
A. A fast non-dominated sorting approachB. Diversity presentation
•Density estimation•Crowded comparison operator
C. The main loop

Slide 15 of 25
Begin
Initialize Population
gen=0
Evaluation Assign Fitness
Cond?
Reproduction
Crossover
Mutation
gen=gen+1 Stop
No
Yes

Slide 16 of 25
n
i i i 1i N
21
c (x - x)=f(x,C) min
x - x =f (x,C) max
Implementation of NSGA-II into calculation stability radius
Pareto set
2
1 1 2 2
1 1 2 2
|
, , , ,
, , , ,
P C x X x X
f x C f x C f x C f x C
f x C f x C f x C f x C

Slide 17 of 25
Representation
Graph is represented by costs matrix (vector)Every variable (feasible solution) is coded in a fixed
length binary string
InitializationBreadth First Search
EvaluationA fast non-dominated sorting approach
find-nondominated-front(P) include first member in
for each take one soltion at a time
include in temporarily for each compare with other members of if , then if dominates a member of , delete it
else if , then if is dominated by other members of ,
do not include in
p P p P
P = P = 1 P
P =P U p q P q p
Pp
p q P =P \ q
q p P =P \ p
Ppp P
p PP

Slide 18 of 25
Assign fitness
Density estimation
Crowding distance is an estimate of the size of the largest cuboid enclosing the point without including any other point in the population
Crowded comparison operator
n rank rank rank rank distance distancei j i <j i =j i >j
distanceii

Slide 19 of 25
Reproduction
The tournament selection scheme
The strings with minimum front number and minimum value of ratios
are selected to the mating pool.
1
2
f(x,C)f (x,C)
A directed graph on 10 nodes

Slide 20 of 25
Crossovers
One-Node crossover5 is a common node for both parents
One-Edge crossoverEdges (2,3) and (1,7) are used as links

Slide 21 of 25
One-Node-Two-Edges crossover
Nodes 4 and 8 do not belong to any of the parents, subpaths ((3,4),(4,6)) and ((6,8),(8,7)) are used as links

Slide 22 of 25
Mutation
The search of genetic algorithm is mainly guided by crossover operators, even though mutationoperator is also used to maintain diversity in the population.
Scheme of two mutation types
Slide 23 of 25
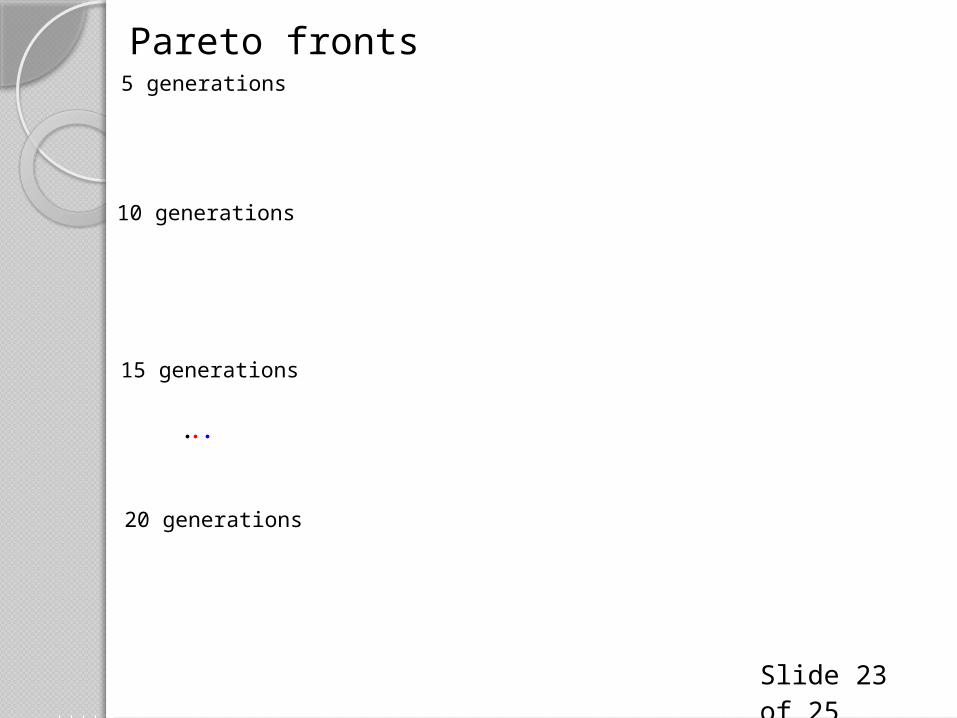
Pareto fronts5 generations
10 generations
20 generations
15 generations

Slide 24 of 25
Simulation resultsWe consider a family of randomly generated directed graphs on 100 verticesand with approximately 5000 edges. Weight range is [1, 50].
Calculation results were compared with solutions obtained by exact method proposed by N. Chakravarti and A. P. M. Wagelmans in Calculation of stabilityradii for combinatorial optimization problems, OR Letters. 23 (1998) 1 – 7.
The population size is set to 100 (number of vertices), while the probabilities of the one-node, one-edge and one-node-two-edges crossovers are 0.2, 0.3 and 0.5 correspondingly, mutation probability increases with the number of generations. Tests show that in average NSGA-II converges in 80% cases and gives the exact solution after 5 – 20 generations.
Complexity of the exact method is
2n n nLog n
NSGA-II complexity is
2kn
Here n is the number of vertices and k is the number of generations.

Slide 25 of 25
References
1. V.A. Emelichev, V.N. Krichko, D.P. Podkopaev, On the radius of stability of a vector problem of linear Boolean programming, Discrete Math. Appl. 10 (2000) 103 – 108
2. N. Chakravarti, A. P.M. Wagelmans, Calculation of stability radii for combinatorial optimization problems, OR Letters. 23 (1998) 1 – 7
3. D. Gusfield, Parametric combinatorial computing and a problem of program module distribution, J. Assoc. Comput. Mach. 30 (1983) 551 – 563
4. V. A. Emelichev, D.P. Podkopaev, Quantitative stability analysis for vector problems of 0 – 1 programming, Discrete Optimization. 7 (2010) 48 – 63
5. K. Deb, A. Pratap, S. Agarwal, T. Meyarivan, A fast and elitist multi-objective genetic algorithm: NSGA-II, Evolutionary Computation. 6 (2) (2002), 182 – 197

Thank You for Your interest
Related Documents











