Lecture 5 - how to find a Lyapunov function? - 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Lecture 5 - how to find a Lyapunov function? -
1

What we already know...
2

3
CALIFORNIA INSTITUTE OF TECHNOLOGYControl and Dynamical Systems
CDS 110a
R. M. Murray Lyapunov Stability Analysis 17 October 2007
This lecture provides an overview of Lyapunov stability for time-invariant systems. We presenta survey of the main results that we shall need in the sequel; proofs are omitted, but can befound in standard texts such as Vidyasagar [2] or Khalil [1].
Reading:
• Astrom and Murray, Section 4.4
1 Basic definitions
Consider a closed loop dynamical system of the form
x = F (x) x ! Rn (1)
with equilibrium point xe ! Rn. We recall the following definition from Monday’s lecture:
Definition 1. An equlibrium point xe = 0 is locally asymptotically stable if
1. xe = 0 is stable in the sense of Lyapunov: for any ! > 0there exists " > 0 such that
"x(0)#xe" < " =$ "x(t)#xe" < ! for all t > 0.
2. xe = 0 is locally attractive: there exists " > 0 such that
"x(t0)" < " =$ limt!"
x(t) = 0
B!
B"
2 Lyapunov Stability
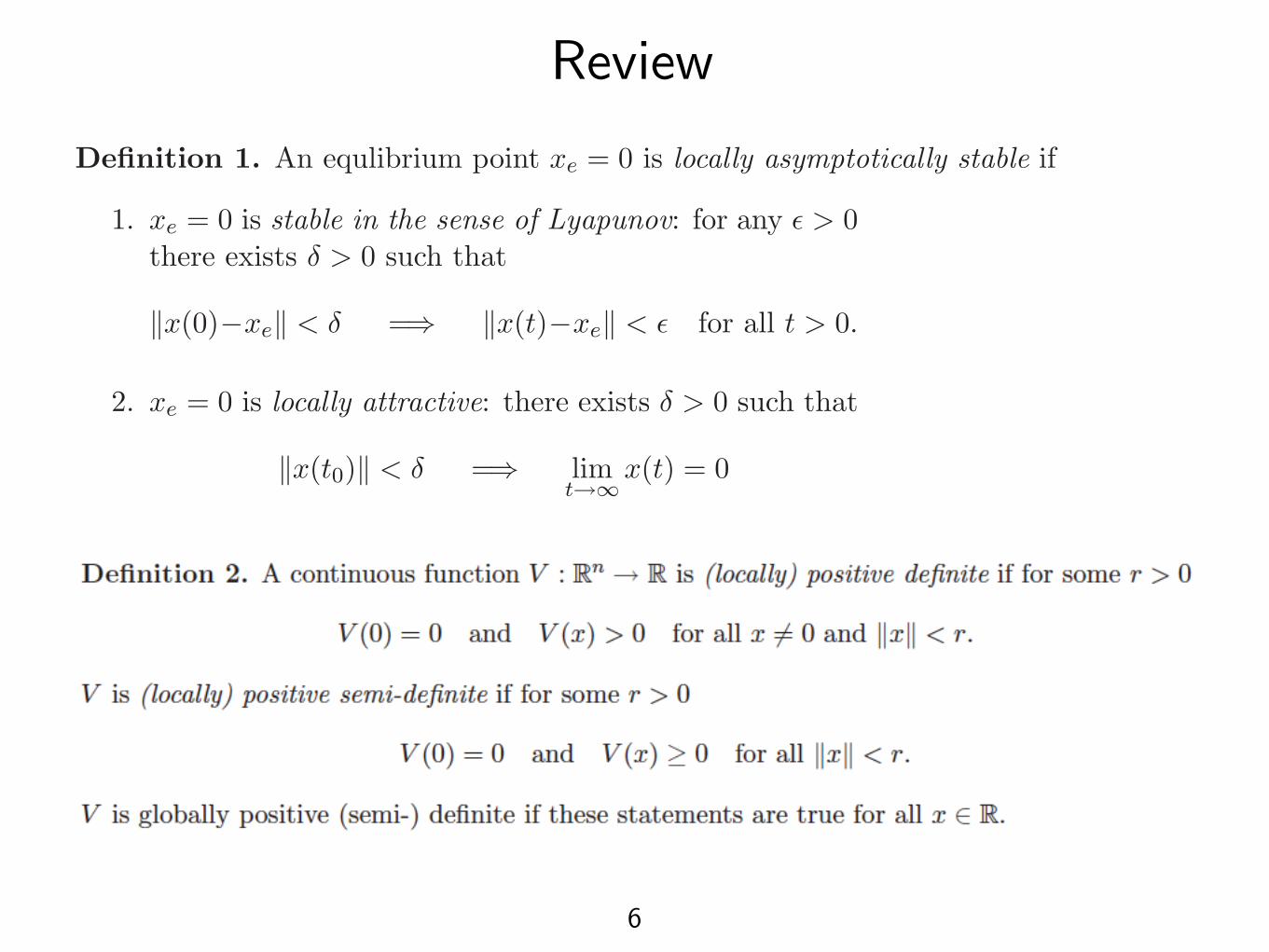
Definition 2. A continuous function V : Rn % R is (locally) positive definite if for some r > 0
V (0) = 0 and V (x) > 0 for all x &= 0 and "x" < r.
V is (locally) positive semi-definite if for some r > 0
V (0) = 0 and V (x) ' 0 for all "x" < r.
V is globally positive (semi-) definite if these statements are true for all x ! R.
Review
4
5
x1
x2
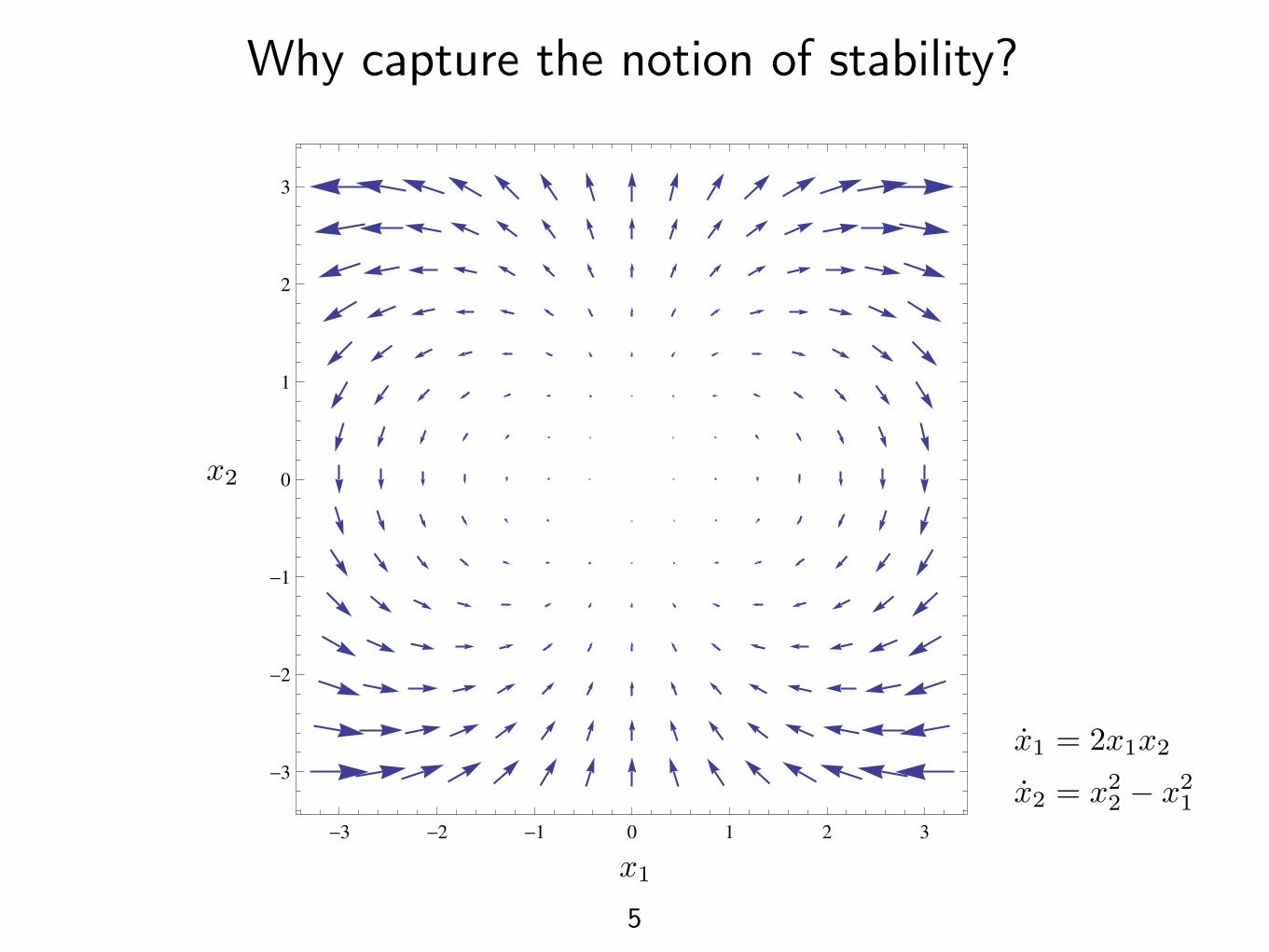
x1 = 2x1x2
x2 = x22 � x2
1
Why capture the notion of stability?
-3 -2 -1 0 1 2 3
-3
-2
-1
0
1
2
3
CALIFORNIA INSTITUTE OF TECHNOLOGYControl and Dynamical Systems
CDS 110a
R. M. Murray Lyapunov Stability Analysis 17 October 2007
This lecture provides an overview of Lyapunov stability for time-invariant systems. We presenta survey of the main results that we shall need in the sequel; proofs are omitted, but can befound in standard texts such as Vidyasagar [2] or Khalil [1].
Reading:
• Astrom and Murray, Section 4.4
1 Basic definitions
Consider a closed loop dynamical system of the form
x = F (x) x ! Rn (1)
with equilibrium point xe ! Rn. We recall the following definition from Monday’s lecture:
Definition 1. An equlibrium point xe = 0 is locally asymptotically stable if
1. xe = 0 is stable in the sense of Lyapunov: for any ! > 0there exists " > 0 such that
"x(0)#xe" < " =$ "x(t)#xe" < ! for all t > 0.
2. xe = 0 is locally attractive: there exists " > 0 such that
"x(t0)" < " =$ limt!"
x(t) = 0
B!
B"
2 Lyapunov Stability
Definition 2. A continuous function V : Rn % R is (locally) positive definite if for some r > 0
V (0) = 0 and V (x) > 0 for all x &= 0 and "x" < r.
V is (locally) positive semi-definite if for some r > 0
V (0) = 0 and V (x) ' 0 for all "x" < r.
V is globally positive (semi-) definite if these statements are true for all x ! R.
Review
6

Type of stability: Lyapunov theory
7
Remarks:
1. To see the di!erence between positive definite and positive semi-definite, suppose that x ! R2
and letV1(x) = x2
1 V2(x) = x21 + x2
2.
Both V1 and V2 are always non-negative. However, it is possible for V1 to be zero even ifx "= 0. Specifically, if we set x = (0, c) where c ! R is any non-zero number, then V1(x) = 0.On the other hand, V2(x) = 0 if and only if x = (0, 0). Thus V1(x) is positive semi-definiteand V2(x) is positive definite.
Theorem 1. Let V be a non-negative function on Rn and let V represent the time derivative of V
along trajectories of the system dynamics (1):
V =!V
!x
dx
dt=
!V
!xF (x).
Let Br = Br(0) be a ball of radius r around the origin. If there exists r > 0 such that V ispositive definite and V is negative semi-definite for all x ! Br, then x = 0 is locally stable in thesense of Lyapunov. If V is positive definite and V is negative definite in Br, then x = 0 is locallyasymptotically stable.
Remarks
1. A function V satisfying the conditions of the theorem is called a Lyapunov function.
2. V (x) is an “energy like” function that bounds the size of x.
V (x) = c1
dx
dt
!V
!x
V (x) = c1
Example 1.
x1 = #x1 # x2 V (x) = x21 + x2
2 > 0 $x "= 0
x2 = #x2 V (x) = 2x1x1 + 2x2x2
= #2x21 # 2x1x2 # 2x2
2
= #(x1 + x2)2 # x2
1 # x22 < 0 $x "= 0
=% globally asymptotically stable.
2
stable in the

How to find a Lyapunov function?• In general (linear + non-linear systems):
- Before guess (before 2000) - Now use SOS-tools (Matlab toolbox) for polynomial
systems with known coefficients
How about for linear systems?
8
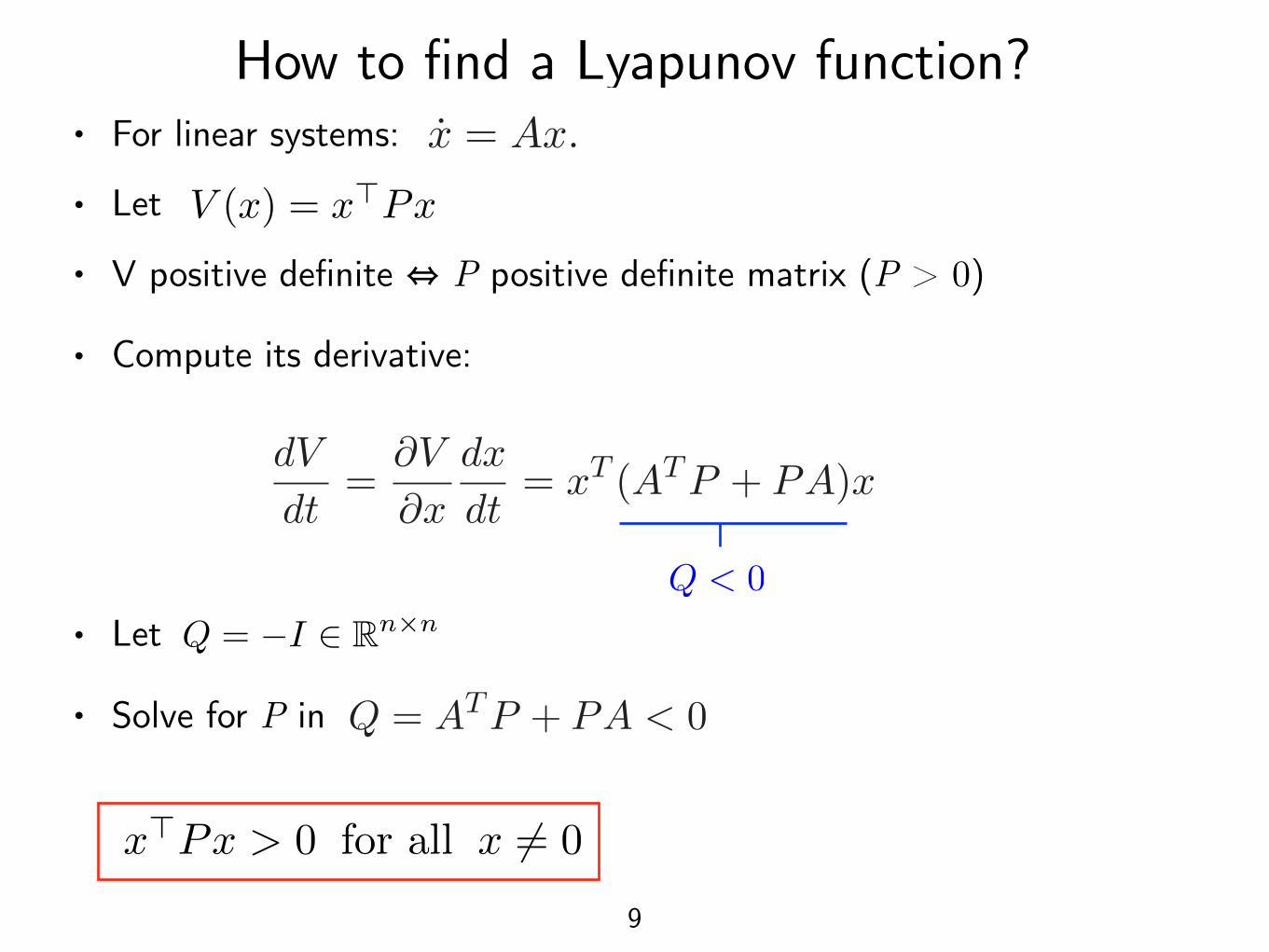
• For linear systems: • Let • V positive definite ⇔ P positive definite matrix (P > 0)
• Compute its derivative:
• Let
• Solve for P in
To fix this problem, we skew the level sets slightly, so that the flow of the system crosses the levelsurfaces transversely. Define
V (x, t) = 12
!
q
q
"T !
k !m
!m m
" !
q
q
"
= 12 qmq + 1
2qkq + !qmq,
where ! is a small positive constant such that V is still positive definite. The derivative of theLyapunov function becomes
V = qmq + qkq + !mq2 + !qmq
= (!c + !m)q2 + !(!kq2 ! cqq) = !
!
q
q
"T !
!k 12!c
12!c c ! !m
" !
q
q
"
.
The function V can be made negative definite for ! chosen su!ciently small (exercise) and hencewe can conclude exponential stability.
Remarks
1. As the previous example shows, a Lyapunov function need not be unique and di"erent Lya-punov functions can give stronger stability results.
2. Lyapunov functions can also be used to prove that a system is unstable: search for V positivedefinite with V positive definite.
3 Lyapunov Functions for Linear Systems
Consider a linear system of the formx = Ax.
Search for a quadratic Lyapunov function
V (x) = xT Px
Compute the derivativedV
dt=
"V
"x
dx
dt= xT (AT P + PA)x.
The requirement that V is positive definite is equivalent to P > 0 and the requirement that V isnegative definite becomes a condition that
Q = AT P + PA < 0 (2)
(as a matrix).
Trick: equation (2) is linear in P . So we can choose Q < 0 and the solve for P .
4
To fix this problem, we skew the level sets slightly, so that the flow of the system crosses the levelsurfaces transversely. Define
V (x, t) = 12
!
q
q
"T !
k !m
!m m
" !
q
q
"
= 12 qmq + 1
2qkq + !qmq,
where ! is a small positive constant such that V is still positive definite. The derivative of theLyapunov function becomes
V = qmq + qkq + !mq2 + !qmq
= (!c + !m)q2 + !(!kq2 ! cqq) = !
!
q
q
"T !
!k 12!c
12!c c ! !m
" !
q
q
"
.
The function V can be made negative definite for ! chosen su!ciently small (exercise) and hencewe can conclude exponential stability.
Remarks
1. As the previous example shows, a Lyapunov function need not be unique and di"erent Lya-punov functions can give stronger stability results.
2. Lyapunov functions can also be used to prove that a system is unstable: search for V positivedefinite with V positive definite.
3 Lyapunov Functions for Linear Systems
Consider a linear system of the formx = Ax.
Search for a quadratic Lyapunov function
V (x) = xT Px
Compute the derivativedV
dt=
"V
"x
dx
dt= xT (AT P + PA)x.
The requirement that V is positive definite is equivalent to P > 0 and the requirement that V isnegative definite becomes a condition that
Q = AT P + PA < 0 (2)
(as a matrix).
Trick: equation (2) is linear in P . So we can choose Q < 0 and the solve for P .
4
To fix this problem, we skew the level sets slightly, so that the flow of the system crosses the levelsurfaces transversely. Define
V (x, t) = 12
!
q
q
"T !
k !m
!m m
" !
q
q
"
= 12 qmq + 1
2qkq + !qmq,
where ! is a small positive constant such that V is still positive definite. The derivative of theLyapunov function becomes
V = qmq + qkq + !mq2 + !qmq
= (!c + !m)q2 + !(!kq2 ! cqq) = !
!
q
q
"T !
!k 12!c
12!c c ! !m
" !
q
q
"
.
The function V can be made negative definite for ! chosen su!ciently small (exercise) and hencewe can conclude exponential stability.
Remarks
1. As the previous example shows, a Lyapunov function need not be unique and di"erent Lya-punov functions can give stronger stability results.
2. Lyapunov functions can also be used to prove that a system is unstable: search for V positivedefinite with V positive definite.
3 Lyapunov Functions for Linear Systems
Consider a linear system of the formx = Ax.
Search for a quadratic Lyapunov function
V (x) = xT Px
Compute the derivativedV
dt=
"V
"x
dx
dt= xT (AT P + PA)x.
The requirement that V is positive definite is equivalent to P > 0 and the requirement that V isnegative definite becomes a condition that
Q = AT P + PA < 0 (2)
(as a matrix).
Trick: equation (2) is linear in P . So we can choose Q < 0 and the solve for P .
4
9
V (x) = x>Px
How to find a Lyapunov function?
x>Px > 0 for all x 6= 0
Q < 0
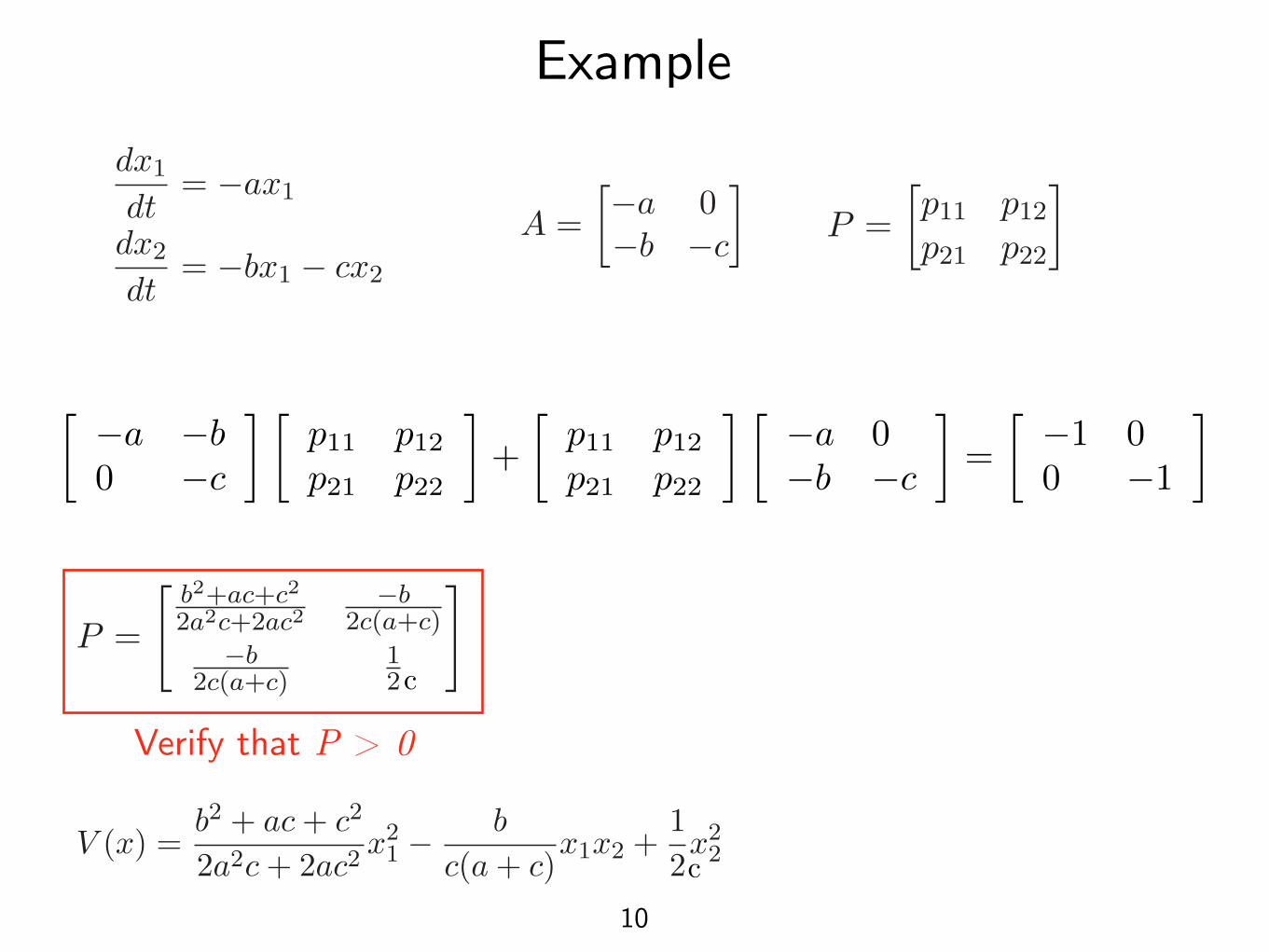
ExampleExample 3. Consider the linear system
dx1
dt= !ax1
dx2
dt= !bx1 ! cx2.
with a, b, c > 0, for which we have
A =
!
!a 0!b !c
"
P =
!
p11 p12
p21 p22
"
.
We choose Q = !I " R2!2 and the corresponding Lyapunov equation is
!
!a !b
0 !c
" !
p11 p12
p21 p22
"
+
!
p11 p12
p21 p22
" !
!a 0!b !c
"
=
!
1 00 1
"
and solving for the elements of P yields
P =
#
b2+ac+c2
2a2c+2ac2"b
2c(a+c)"b
2c(a+c)12
$
or
V (x) =b2 + ac + c2
2a2c + 2ac2x2
1 !b
c(a + c)x1x2 +
1
2x2
2.
It is easy to verify that P > 0 (check its eigenvalues) and by construction P = !I < 0. Hence thesystem is asymptotically stable.
4 Krasolvskii-Lasalle Invariance Principle (optional)
The Krasolvskii-Lasalle invariance principle provides a way to prove asymptotic stability when V
is negative semi-definite (which is usually much easier to find).
Denote the solution trajectories of the time-invariant system
dx
dt= F (x) (3)
as x(t; x0, t0), which is the solution of equation (3) at time t starting from x0 at t0. We writex(·; x0, t0) for the set of all points lying along the trajectory.Definition 3 (! limit set). The ! limit set of a trajectory x(·; x0, t0) is the set of all points z " Rn
such that there exists a strictly increasing sequence of times tn such that
s(tn; x0, t0) # z
as n # $.
5
Example 3. Consider the linear system
dx1
dt= !ax1
dx2
dt= !bx1 ! cx2.
with a, b, c > 0, for which we have
A =
!
!a 0!b !c
"
P =
!
p11 p12
p21 p22
"
.
We choose Q = !I " R2!2 and the corresponding Lyapunov equation is
!
!a !b
0 !c
" !
p11 p12
p21 p22
"
+
!
p11 p12
p21 p22
" !
!a 0!b !c
"
=
!
1 00 1
"
and solving for the elements of P yields
P =
#
b2+ac+c2
2a2c+2ac2"b
2c(a+c)"b
2c(a+c)12
$
or
V (x) =b2 + ac + c2
2a2c + 2ac2x2
1 !b
c(a + c)x1x2 +
1
2x2
2.
It is easy to verify that P > 0 (check its eigenvalues) and by construction P = !I < 0. Hence thesystem is asymptotically stable.
4 Krasolvskii-Lasalle Invariance Principle (optional)
The Krasolvskii-Lasalle invariance principle provides a way to prove asymptotic stability when V
is negative semi-definite (which is usually much easier to find).
Denote the solution trajectories of the time-invariant system
dx
dt= F (x) (3)
as x(t; x0, t0), which is the solution of equation (3) at time t starting from x0 at t0. We writex(·; x0, t0) for the set of all points lying along the trajectory.Definition 3 (! limit set). The ! limit set of a trajectory x(·; x0, t0) is the set of all points z " Rn
such that there exists a strictly increasing sequence of times tn such that
s(tn; x0, t0) # z
as n # $.
5
Example 3. Consider the linear system
dx1
dt= !ax1
dx2
dt= !bx1 ! cx2.
with a, b, c > 0, for which we have
A =
!
!a 0!b !c
"
P =
!
p11 p12
p21 p22
"
.
We choose Q = !I " R2!2 and the corresponding Lyapunov equation is
!
!a !b
0 !c
" !
p11 p12
p21 p22
"
+
!
p11 p12
p21 p22
" !
!a 0!b !c
"
=
!
1 00 1
"
and solving for the elements of P yields
P =
#
b2+ac+c2
2a2c+2ac2"b
2c(a+c)"b
2c(a+c)12
$
or
V (x) =b2 + ac + c2
2a2c + 2ac2x2
1 !b
c(a + c)x1x2 +
1
2x2
2.
It is easy to verify that P > 0 (check its eigenvalues) and by construction P = !I < 0. Hence thesystem is asymptotically stable.
4 Krasolvskii-Lasalle Invariance Principle (optional)
The Krasolvskii-Lasalle invariance principle provides a way to prove asymptotic stability when V
is negative semi-definite (which is usually much easier to find).
Denote the solution trajectories of the time-invariant system
dx
dt= F (x) (3)
as x(t; x0, t0), which is the solution of equation (3) at time t starting from x0 at t0. We writex(·; x0, t0) for the set of all points lying along the trajectory.Definition 3 (! limit set). The ! limit set of a trajectory x(·; x0, t0) is the set of all points z " Rn
such that there exists a strictly increasing sequence of times tn such that
s(tn; x0, t0) # z
as n # $.
5
10
�a �b0 �c
� p11 p12p21 p22
�+
p11 p12p21 p22
� �a 0�b �c
�=
�1 00 �1
�
Example 3. Consider the linear system
dx1
dt= !ax1
dx2
dt= !bx1 ! cx2.
with a, b, c > 0, for which we have
A =
!
!a 0!b !c
"
P =
!
p11 p12
p21 p22
"
.
We choose Q = !I " R2!2 and the corresponding Lyapunov equation is
!
!a !b
0 !c
" !
p11 p12
p21 p22
"
+
!
p11 p12
p21 p22
" !
!a 0!b !c
"
=
!
1 00 1
"
and solving for the elements of P yields
P =
#
b2+ac+c2
2a2c+2ac2"b
2c(a+c)"b
2c(a+c)12
$
or
V (x) =b2 + ac + c2
2a2c + 2ac2x2
1 !b
c(a + c)x1x2 +
1
2x2
2.
It is easy to verify that P > 0 (check its eigenvalues) and by construction P = !I < 0. Hence thesystem is asymptotically stable.
4 Krasolvskii-Lasalle Invariance Principle (optional)
The Krasolvskii-Lasalle invariance principle provides a way to prove asymptotic stability when V
is negative semi-definite (which is usually much easier to find).
Denote the solution trajectories of the time-invariant system
dx
dt= F (x) (3)
as x(t; x0, t0), which is the solution of equation (3) at time t starting from x0 at t0. We writex(·; x0, t0) for the set of all points lying along the trajectory.Definition 3 (! limit set). The ! limit set of a trajectory x(·; x0, t0) is the set of all points z " Rn
such that there exists a strictly increasing sequence of times tn such that
s(tn; x0, t0) # z
as n # $.
5
c
c
Example 3. Consider the linear system
dx1
dt= !ax1
dx2
dt= !bx1 ! cx2.
with a, b, c > 0, for which we have
A =
!
!a 0!b !c
"
P =
!
p11 p12
p21 p22
"
.
We choose Q = !I " R2!2 and the corresponding Lyapunov equation is
!
!a !b
0 !c
" !
p11 p12
p21 p22
"
+
!
p11 p12
p21 p22
" !
!a 0!b !c
"
=
!
1 00 1
"
and solving for the elements of P yields
P =
#
b2+ac+c2
2a2c+2ac2"b
2c(a+c)"b
2c(a+c)12
$
or
V (x) =b2 + ac + c2
2a2c + 2ac2x2
1 !b
c(a + c)x1x2 +
1
2x2
2.
It is easy to verify that P > 0 (check its eigenvalues) and by construction P = !I < 0. Hence thesystem is asymptotically stable.
4 Krasolvskii-Lasalle Invariance Principle (optional)
The Krasolvskii-Lasalle invariance principle provides a way to prove asymptotic stability when V
is negative semi-definite (which is usually much easier to find).
Denote the solution trajectories of the time-invariant system
dx
dt= F (x) (3)
as x(t; x0, t0), which is the solution of equation (3) at time t starting from x0 at t0. We writex(·; x0, t0) for the set of all points lying along the trajectory.Definition 3 (! limit set). The ! limit set of a trajectory x(·; x0, t0) is the set of all points z " Rn
such that there exists a strictly increasing sequence of times tn such that
s(tn; x0, t0) # z
as n # $.
5
Verify that P > 0

• A is Hermitian (or symmetric in the case of real matrices) matrix is positive definite if:
- All the diagonal entries are positive - Each diagonal entry is greater than the sum of the
absolute values of all other entries in the same row.
11
How to determine positive-definiteness
Sufficient but not necessary!
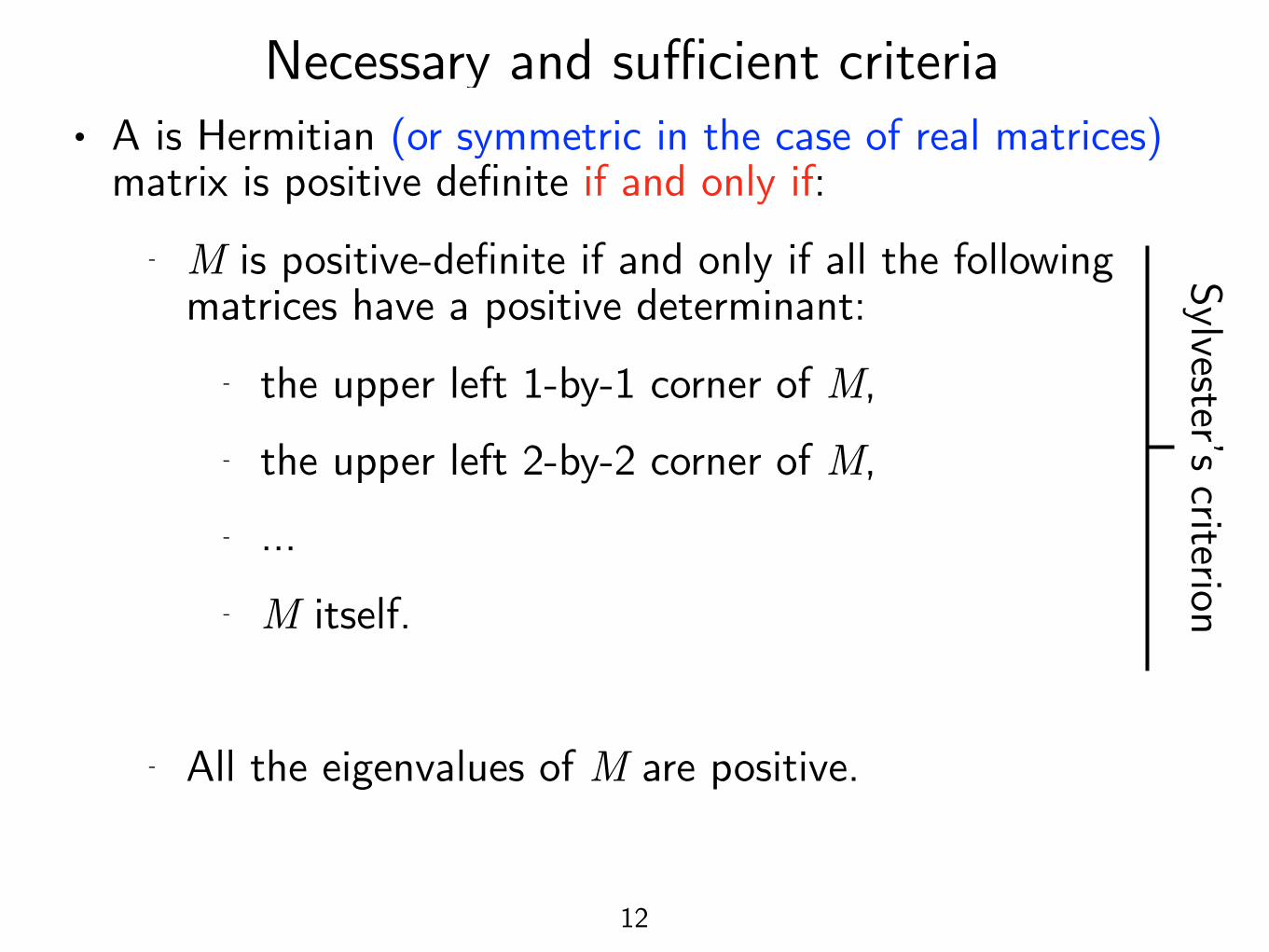
• A is Hermitian (or symmetric in the case of real matrices) matrix is positive definite if and only if:
- M is positive-definite if and only if all the following matrices have a positive determinant:
- the upper left 1-by-1 corner of M, - the upper left 2-by-2 corner of M, - ... - M itself.
- All the eigenvalues of M are positive.
12
Necessary and sufficient criteriaSylvester’s criterion
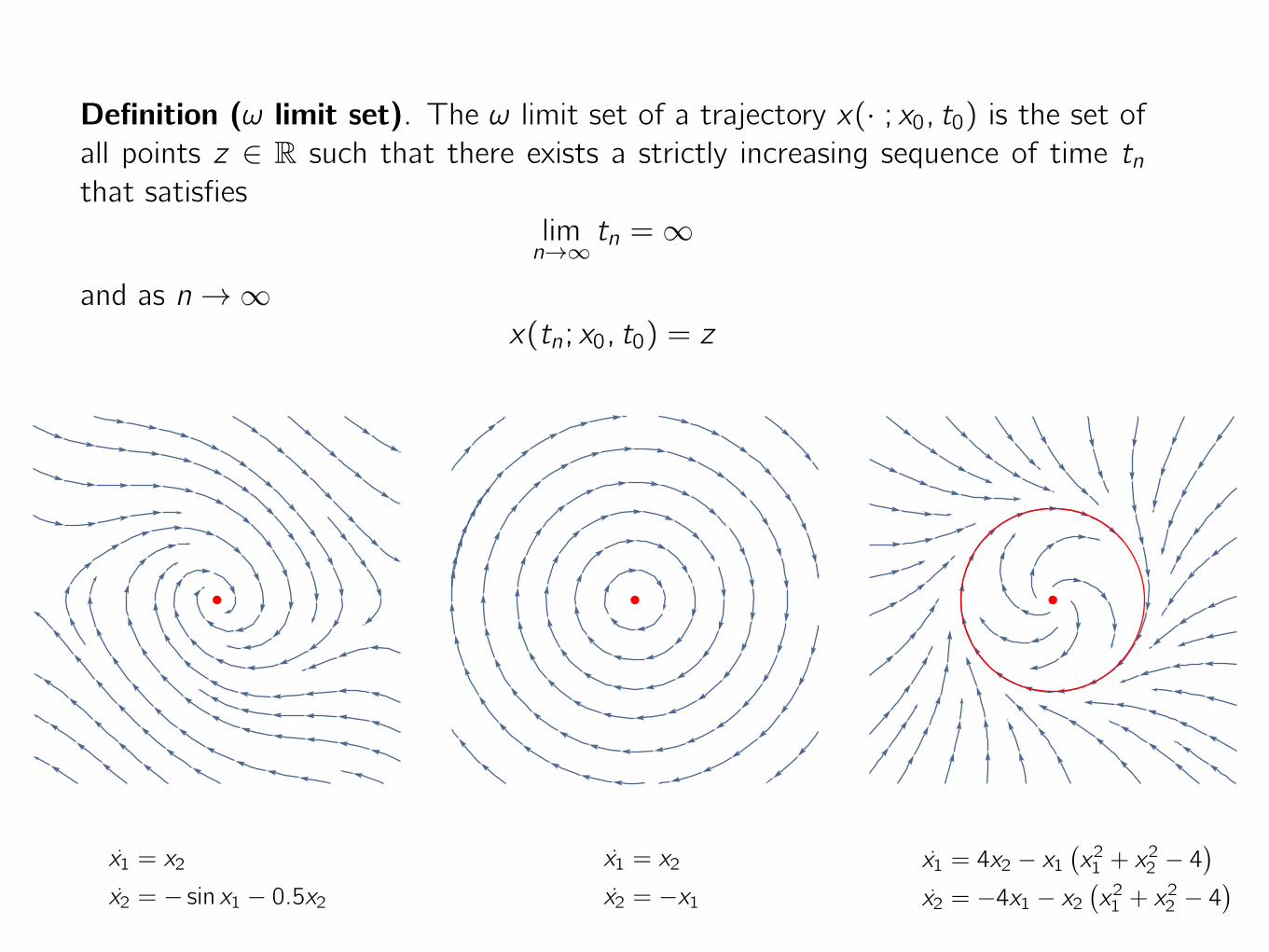
Definition (! limit set). The ! limit set of a trajectory x(· ; x0, t0) is the set ofall points z 2 R such that there exists a strictly increasing sequence of time tnthat satisfies
limn!1
tn =1
and as n !1x(tn; x0, t0) = z
<latexit sha1_base64="pccmApurO01imMqzBE2Q6x6+NCY=">AAADanicbVJLb9NAELYbHsW82nJCvYyokYKEKqcXQFWlSnDgWFBfUjey1utxsnS9NrtjSGrll/FLOHIFfgNinAZBG0ZaaXZmvnl8M1lttKck+Rqu9G7cvHV79U509979Bw/X1jeOfdU4hUeqMpU7zaRHoy0ekSaDp7VDWWYGT7Lz153/5BM6ryt7SNMah6UcWV1oJYlN6Xp4KGylbY6WQBBOKCvaN1hoqzs/9GNRlTiSMRhdagKP9Gy2DYdjhGUPVAVIICc/oKLKTSGe9IXKKxK7uzBJk+eUJs9i0B6I8X8AxkDNHZCH+AKEtiBKSeMsa9/PYvCNGnO0pA7iEHDClHiu4slpRWYK2iqe12s74owfG7QKu7SkS26RUhtfwj3P6wuNPhJnkeCW09YKp0djks5Vn7vCBU1nwIi9xScSw0jaHCR3xl0tBcddqkmfEX+ngz24YFy6tpVsJ3OBZWWwULaChRyka79EXqmm5DUoI70/GyQ1DVvpSCuDs0g0HmupzuUIz1i1skQ/bOfrn8FTtuRQVI4fr3Fu/RfRytL7aZlxZEetv+7rjP/1GSxI55Nr5al4OWy1rRtisi+rF40BqqA7MMi1w/lmci2V4zNSoMbSSUV8hlfSqzKbkzqLIiZscJ2eZeV4Z3vA+rudrf1XC+pWg83gSdAPBsGLYD94GxwER4EKv4Tfwu/hj5WfvY3e497mZehKuMA8Cq5IL/4NgfIU7w==</latexit><latexit sha1_base64="pccmApurO01imMqzBE2Q6x6+NCY=">AAADanicbVJLb9NAELYbHsW82nJCvYyokYKEKqcXQFWlSnDgWFBfUjey1utxsnS9NrtjSGrll/FLOHIFfgNinAZBG0ZaaXZmvnl8M1lttKck+Rqu9G7cvHV79U509979Bw/X1jeOfdU4hUeqMpU7zaRHoy0ekSaDp7VDWWYGT7Lz153/5BM6ryt7SNMah6UcWV1oJYlN6Xp4KGylbY6WQBBOKCvaN1hoqzs/9GNRlTiSMRhdagKP9Gy2DYdjhGUPVAVIICc/oKLKTSGe9IXKKxK7uzBJk+eUJs9i0B6I8X8AxkDNHZCH+AKEtiBKSeMsa9/PYvCNGnO0pA7iEHDClHiu4slpRWYK2iqe12s74owfG7QKu7SkS26RUhtfwj3P6wuNPhJnkeCW09YKp0djks5Vn7vCBU1nwIi9xScSw0jaHCR3xl0tBcddqkmfEX+ngz24YFy6tpVsJ3OBZWWwULaChRyka79EXqmm5DUoI70/GyQ1DVvpSCuDs0g0HmupzuUIz1i1skQ/bOfrn8FTtuRQVI4fr3Fu/RfRytL7aZlxZEetv+7rjP/1GSxI55Nr5al4OWy1rRtisi+rF40BqqA7MMi1w/lmci2V4zNSoMbSSUV8hlfSqzKbkzqLIiZscJ2eZeV4Z3vA+rudrf1XC+pWg83gSdAPBsGLYD94GxwER4EKv4Tfwu/hj5WfvY3e497mZehKuMA8Cq5IL/4NgfIU7w==</latexit><latexit sha1_base64="pccmApurO01imMqzBE2Q6x6+NCY=">AAADanicbVJLb9NAELYbHsW82nJCvYyokYKEKqcXQFWlSnDgWFBfUjey1utxsnS9NrtjSGrll/FLOHIFfgNinAZBG0ZaaXZmvnl8M1lttKck+Rqu9G7cvHV79U509979Bw/X1jeOfdU4hUeqMpU7zaRHoy0ekSaDp7VDWWYGT7Lz153/5BM6ryt7SNMah6UcWV1oJYlN6Xp4KGylbY6WQBBOKCvaN1hoqzs/9GNRlTiSMRhdagKP9Gy2DYdjhGUPVAVIICc/oKLKTSGe9IXKKxK7uzBJk+eUJs9i0B6I8X8AxkDNHZCH+AKEtiBKSeMsa9/PYvCNGnO0pA7iEHDClHiu4slpRWYK2iqe12s74owfG7QKu7SkS26RUhtfwj3P6wuNPhJnkeCW09YKp0djks5Vn7vCBU1nwIi9xScSw0jaHCR3xl0tBcddqkmfEX+ngz24YFy6tpVsJ3OBZWWwULaChRyka79EXqmm5DUoI70/GyQ1DVvpSCuDs0g0HmupzuUIz1i1skQ/bOfrn8FTtuRQVI4fr3Fu/RfRytL7aZlxZEetv+7rjP/1GSxI55Nr5al4OWy1rRtisi+rF40BqqA7MMi1w/lmci2V4zNSoMbSSUV8hlfSqzKbkzqLIiZscJ2eZeV4Z3vA+rudrf1XC+pWg83gSdAPBsGLYD94GxwER4EKv4Tfwu/hj5WfvY3e497mZehKuMA8Cq5IL/4NgfIU7w==</latexit><latexit sha1_base64="pccmApurO01imMqzBE2Q6x6+NCY=">AAADanicbVJLb9NAELYbHsW82nJCvYyokYKEKqcXQFWlSnDgWFBfUjey1utxsnS9NrtjSGrll/FLOHIFfgNinAZBG0ZaaXZmvnl8M1lttKck+Rqu9G7cvHV79U509979Bw/X1jeOfdU4hUeqMpU7zaRHoy0ekSaDp7VDWWYGT7Lz153/5BM6ryt7SNMah6UcWV1oJYlN6Xp4KGylbY6WQBBOKCvaN1hoqzs/9GNRlTiSMRhdagKP9Gy2DYdjhGUPVAVIICc/oKLKTSGe9IXKKxK7uzBJk+eUJs9i0B6I8X8AxkDNHZCH+AKEtiBKSeMsa9/PYvCNGnO0pA7iEHDClHiu4slpRWYK2iqe12s74owfG7QKu7SkS26RUhtfwj3P6wuNPhJnkeCW09YKp0djks5Vn7vCBU1nwIi9xScSw0jaHCR3xl0tBcddqkmfEX+ngz24YFy6tpVsJ3OBZWWwULaChRyka79EXqmm5DUoI70/GyQ1DVvpSCuDs0g0HmupzuUIz1i1skQ/bOfrn8FTtuRQVI4fr3Fu/RfRytL7aZlxZEetv+7rjP/1GSxI55Nr5al4OWy1rRtisi+rF40BqqA7MMi1w/lmci2V4zNSoMbSSUV8hlfSqzKbkzqLIiZscJ2eZeV4Z3vA+rudrf1XC+pWg83gSdAPBsGLYD94GxwER4EKv4Tfwu/hj5WfvY3e497mZehKuMA8Cq5IL/4NgfIU7w==</latexit>
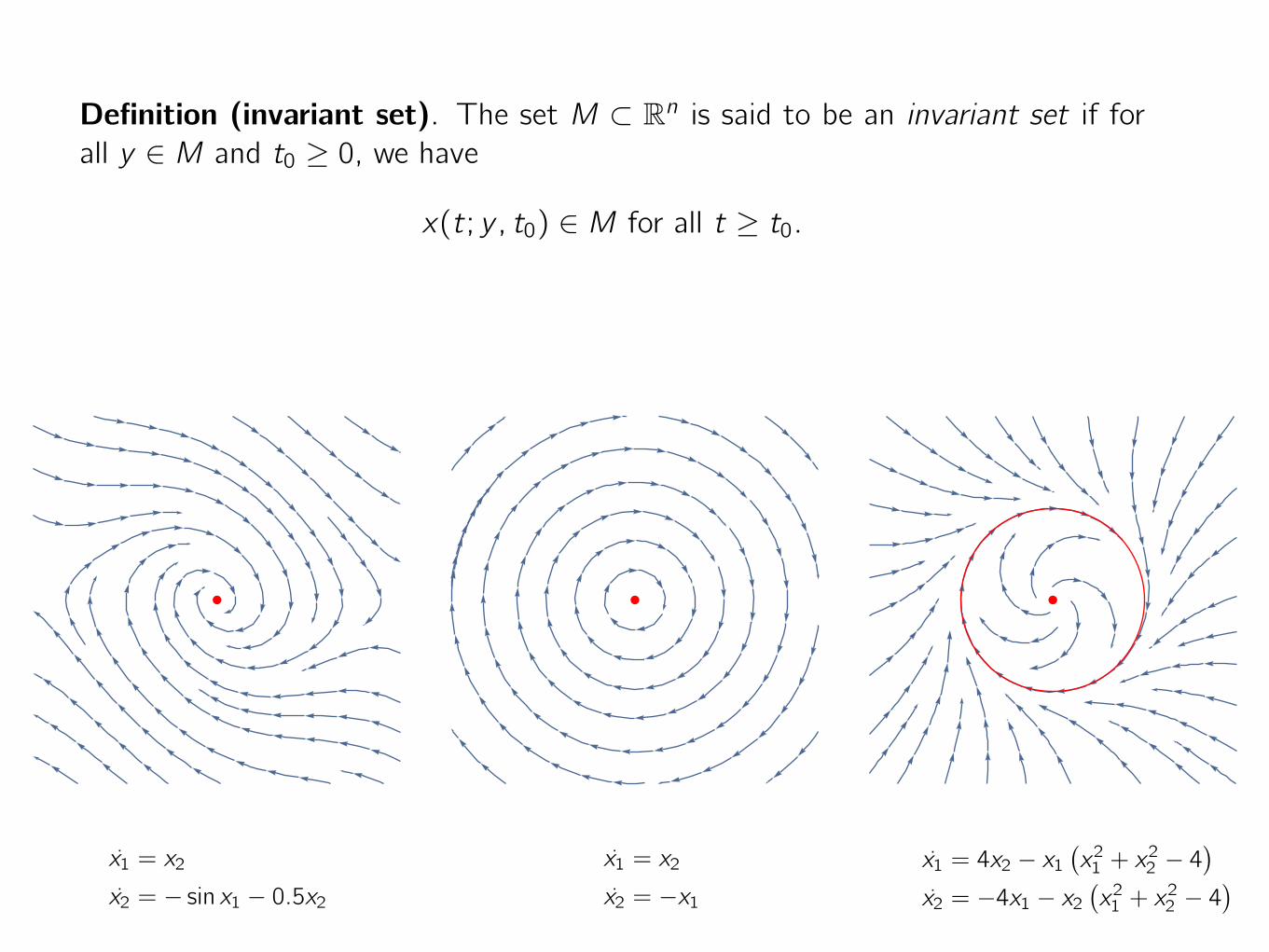
x1 = 4x2 � x1�x21 + x
22 � 4
�
x2 = �4x1 � x2�x21 + x
22 � 4
�<latexit sha1_base64="X8dI3zyxSAEaW5DVrt7CJGD57IY=">AAACdXicfZHNSiNBFIUrPepo+5eZWYpQGBVFot1NQDdCwI3LCEYFO7bVleqkSPUPVbclocnr+Q6+w2xn3Ik3sRcaxQsFH+fWqcs9FWZKGnCcp4r1Y25+4efikr28srq2Xv31+8qkueaizVOV6puQGaFkItogQYmbTAsWh0pch4OzSf/6QWgj0+QSRpnoxKyXyEhyBigF1Xu/m0IxDNzx7mljGHh1ROorEcEe0p13gNqdV2/4Wvb6sO/7dmnw0FBHh4sO7xtHUK05h8606GdwS6iRslpB9QUn8DwWCXDFjLl1nQw6BdMguRJj28+NyBgfsJ64RUxYLEynmCYxpjuodGmUajwJ0Kn63lGw2JhRHOLNmEHfzPYm4pe9yX6yO5wZD9FJp5BJloNI+Nv0KFcUUjrJmnalFhzUCIFxLXEByvtMMw74Ix+e53E4jWts2xiYOxvPZ7jyDl3ki0at2SijWyQbZIvsEZcckyY5Jy3SJpw8kr/kH/lfebY2rW1r9+2qVSk9f8iHso5eAYd6vd8=</latexit><latexit sha1_base64="X8dI3zyxSAEaW5DVrt7CJGD57IY=">AAACdXicfZHNSiNBFIUrPepo+5eZWYpQGBVFot1NQDdCwI3LCEYFO7bVleqkSPUPVbclocnr+Q6+w2xn3Ik3sRcaxQsFH+fWqcs9FWZKGnCcp4r1Y25+4efikr28srq2Xv31+8qkueaizVOV6puQGaFkItogQYmbTAsWh0pch4OzSf/6QWgj0+QSRpnoxKyXyEhyBigF1Xu/m0IxDNzx7mljGHh1ROorEcEe0p13gNqdV2/4Wvb6sO/7dmnw0FBHh4sO7xtHUK05h8606GdwS6iRslpB9QUn8DwWCXDFjLl1nQw6BdMguRJj28+NyBgfsJ64RUxYLEynmCYxpjuodGmUajwJ0Kn63lGw2JhRHOLNmEHfzPYm4pe9yX6yO5wZD9FJp5BJloNI+Nv0KFcUUjrJmnalFhzUCIFxLXEByvtMMw74Ix+e53E4jWts2xiYOxvPZ7jyDl3ki0at2SijWyQbZIvsEZcckyY5Jy3SJpw8kr/kH/lfebY2rW1r9+2qVSk9f8iHso5eAYd6vd8=</latexit><latexit sha1_base64="X8dI3zyxSAEaW5DVrt7CJGD57IY=">AAACdXicfZHNSiNBFIUrPepo+5eZWYpQGBVFot1NQDdCwI3LCEYFO7bVleqkSPUPVbclocnr+Q6+w2xn3Ik3sRcaxQsFH+fWqcs9FWZKGnCcp4r1Y25+4efikr28srq2Xv31+8qkueaizVOV6puQGaFkItogQYmbTAsWh0pch4OzSf/6QWgj0+QSRpnoxKyXyEhyBigF1Xu/m0IxDNzx7mljGHh1ROorEcEe0p13gNqdV2/4Wvb6sO/7dmnw0FBHh4sO7xtHUK05h8606GdwS6iRslpB9QUn8DwWCXDFjLl1nQw6BdMguRJj28+NyBgfsJ64RUxYLEynmCYxpjuodGmUajwJ0Kn63lGw2JhRHOLNmEHfzPYm4pe9yX6yO5wZD9FJp5BJloNI+Nv0KFcUUjrJmnalFhzUCIFxLXEByvtMMw74Ix+e53E4jWts2xiYOxvPZ7jyDl3ki0at2SijWyQbZIvsEZcckyY5Jy3SJpw8kr/kH/lfebY2rW1r9+2qVSk9f8iHso5eAYd6vd8=</latexit><latexit sha1_base64="X8dI3zyxSAEaW5DVrt7CJGD57IY=">AAACdXicfZHNSiNBFIUrPepo+5eZWYpQGBVFot1NQDdCwI3LCEYFO7bVleqkSPUPVbclocnr+Q6+w2xn3Ik3sRcaxQsFH+fWqcs9FWZKGnCcp4r1Y25+4efikr28srq2Xv31+8qkueaizVOV6puQGaFkItogQYmbTAsWh0pch4OzSf/6QWgj0+QSRpnoxKyXyEhyBigF1Xu/m0IxDNzx7mljGHh1ROorEcEe0p13gNqdV2/4Wvb6sO/7dmnw0FBHh4sO7xtHUK05h8606GdwS6iRslpB9QUn8DwWCXDFjLl1nQw6BdMguRJj28+NyBgfsJ64RUxYLEynmCYxpjuodGmUajwJ0Kn63lGw2JhRHOLNmEHfzPYm4pe9yX6yO5wZD9FJp5BJloNI+Nv0KFcUUjrJmnalFhzUCIFxLXEByvtMMw74Ix+e53E4jWts2xiYOxvPZ7jyDl3ki0at2SijWyQbZIvsEZcckyY5Jy3SJpw8kr/kH/lfebY2rW1r9+2qVSk9f8iHso5eAYd6vd8=</latexit>
x1 = x2
x2 = �x1<latexit sha1_base64="IgCscotfUUmtUuF1uz3l/H9N6cE=">AAACNXicbZDLSsNAFIYn9VbjLerSzWBR3FiSUtCNUHDjsoK9QBvCZDpph04uzJxIS+jWp3GrPosLd+LWNxCnbRa29cCBn+/cOL+fCK7Att+Nwtr6xuZWcdvc2d3bP7AOj5oqTiVlDRqLWLZ9opjgEWsAB8HaiWQk9AVr+cPbab31yKTicfQA44S5IelHPOCUgEaehbu9GLKR50zOb0Zepds1c1DR4FJzzyrZZXsWeFU4uSihPOqe9aM30DRkEVBBlOo4dgJuRiRwKtjE7KaKJYQOSZ91tIxIyJSbzT6Z4DNNejiIpc4I8Iz+nchIqNQ49HVnSGCglmtT+G9NsAB4b7R0HoJrN+NRkgKL6Px6kAoMMZ56hXtcMgpirAWhkusHMB0QSShoRxfW09CXvD+AiWlqw5xle1ZFs1J2tL6vlmrV3LoiOkGn6AI56ArV0B2qowai6Ak9oxf0arwZH8an8TVvLRj5zDFaCOP7F0MWqyo=</latexit><latexit sha1_base64="IgCscotfUUmtUuF1uz3l/H9N6cE=">AAACNXicbZDLSsNAFIYn9VbjLerSzWBR3FiSUtCNUHDjsoK9QBvCZDpph04uzJxIS+jWp3GrPosLd+LWNxCnbRa29cCBn+/cOL+fCK7Att+Nwtr6xuZWcdvc2d3bP7AOj5oqTiVlDRqLWLZ9opjgEWsAB8HaiWQk9AVr+cPbab31yKTicfQA44S5IelHPOCUgEaehbu9GLKR50zOb0Zepds1c1DR4FJzzyrZZXsWeFU4uSihPOqe9aM30DRkEVBBlOo4dgJuRiRwKtjE7KaKJYQOSZ91tIxIyJSbzT6Z4DNNejiIpc4I8Iz+nchIqNQ49HVnSGCglmtT+G9NsAB4b7R0HoJrN+NRkgKL6Px6kAoMMZ56hXtcMgpirAWhkusHMB0QSShoRxfW09CXvD+AiWlqw5xle1ZFs1J2tL6vlmrV3LoiOkGn6AI56ArV0B2qowai6Ak9oxf0arwZH8an8TVvLRj5zDFaCOP7F0MWqyo=</latexit><latexit sha1_base64="IgCscotfUUmtUuF1uz3l/H9N6cE=">AAACNXicbZDLSsNAFIYn9VbjLerSzWBR3FiSUtCNUHDjsoK9QBvCZDpph04uzJxIS+jWp3GrPosLd+LWNxCnbRa29cCBn+/cOL+fCK7Att+Nwtr6xuZWcdvc2d3bP7AOj5oqTiVlDRqLWLZ9opjgEWsAB8HaiWQk9AVr+cPbab31yKTicfQA44S5IelHPOCUgEaehbu9GLKR50zOb0Zepds1c1DR4FJzzyrZZXsWeFU4uSihPOqe9aM30DRkEVBBlOo4dgJuRiRwKtjE7KaKJYQOSZ91tIxIyJSbzT6Z4DNNejiIpc4I8Iz+nchIqNQ49HVnSGCglmtT+G9NsAB4b7R0HoJrN+NRkgKL6Px6kAoMMZ56hXtcMgpirAWhkusHMB0QSShoRxfW09CXvD+AiWlqw5xle1ZFs1J2tL6vlmrV3LoiOkGn6AI56ArV0B2qowai6Ak9oxf0arwZH8an8TVvLRj5zDFaCOP7F0MWqyo=</latexit><latexit sha1_base64="IgCscotfUUmtUuF1uz3l/H9N6cE=">AAACNXicbZDLSsNAFIYn9VbjLerSzWBR3FiSUtCNUHDjsoK9QBvCZDpph04uzJxIS+jWp3GrPosLd+LWNxCnbRa29cCBn+/cOL+fCK7Att+Nwtr6xuZWcdvc2d3bP7AOj5oqTiVlDRqLWLZ9opjgEWsAB8HaiWQk9AVr+cPbab31yKTicfQA44S5IelHPOCUgEaehbu9GLKR50zOb0Zepds1c1DR4FJzzyrZZXsWeFU4uSihPOqe9aM30DRkEVBBlOo4dgJuRiRwKtjE7KaKJYQOSZ91tIxIyJSbzT6Z4DNNejiIpc4I8Iz+nchIqNQ49HVnSGCglmtT+G9NsAB4b7R0HoJrN+NRkgKL6Px6kAoMMZ56hXtcMgpirAWhkusHMB0QSShoRxfW09CXvD+AiWlqw5xle1ZFs1J2tL6vlmrV3LoiOkGn6AI56ArV0B2qowai6Ak9oxf0arwZH8an8TVvLRj5zDFaCOP7F0MWqyo=</latexit>
x1 = x2
x2 = � sin x1 � 0.5x2<latexit sha1_base64="CuXvyGt5nQE0FFMe+dam2epzzMc=">AAACRXicbZDNSsNAFIUn9a/Gv6pLN4NFcWNJiqIbQXDjsoLVQhPCZDpph04mYeZGWkJew6dxqz6DD+FOXKrTmoVWLwwcvnPnXu4JU8E1OM6LVZmbX1hcqi7bK6tr6xu1za0bnWSKsjZNRKI6IdFMcMnawEGwTqoYiUPBbsPhxcS/vWNK80Rewzhlfkz6kkecEjAoqDleL4F8FLjF/tkoaHqeXYKmAYee5nJq4kPsNI6xwUGt7jScaeG/wi1FHZXVCmofZiLNYiaBCqJ113VS8HOigFPBCtvLNEsJHZI+6xopScy0n08vK/CeIT0cJco8CXhKf/7ISaz1OA5NZ0xgoGe9CfzXEywC3hvNrIfo1M+5TDNgkn5vjzKBIcGT7HCPK0ZBjI0gVHFzAKYDoggFk/Cv8TQOFe8PoLBtE5g7G89fcdNsuEZfHdXPj8roqmgH7aID5KITdI4uUQu1EUX36AE9oifr2Xq13qz379aKVf7ZRr/K+vwChZ2wkQ==</latexit><latexit sha1_base64="CuXvyGt5nQE0FFMe+dam2epzzMc=">AAACRXicbZDNSsNAFIUn9a/Gv6pLN4NFcWNJiqIbQXDjsoLVQhPCZDpph04mYeZGWkJew6dxqz6DD+FOXKrTmoVWLwwcvnPnXu4JU8E1OM6LVZmbX1hcqi7bK6tr6xu1za0bnWSKsjZNRKI6IdFMcMnawEGwTqoYiUPBbsPhxcS/vWNK80Rewzhlfkz6kkecEjAoqDleL4F8FLjF/tkoaHqeXYKmAYee5nJq4kPsNI6xwUGt7jScaeG/wi1FHZXVCmofZiLNYiaBCqJ113VS8HOigFPBCtvLNEsJHZI+6xopScy0n08vK/CeIT0cJco8CXhKf/7ISaz1OA5NZ0xgoGe9CfzXEywC3hvNrIfo1M+5TDNgkn5vjzKBIcGT7HCPK0ZBjI0gVHFzAKYDoggFk/Cv8TQOFe8PoLBtE5g7G89fcdNsuEZfHdXPj8roqmgH7aID5KITdI4uUQu1EUX36AE9oifr2Xq13qz379aKVf7ZRr/K+vwChZ2wkQ==</latexit><latexit sha1_base64="CuXvyGt5nQE0FFMe+dam2epzzMc=">AAACRXicbZDNSsNAFIUn9a/Gv6pLN4NFcWNJiqIbQXDjsoLVQhPCZDpph04mYeZGWkJew6dxqz6DD+FOXKrTmoVWLwwcvnPnXu4JU8E1OM6LVZmbX1hcqi7bK6tr6xu1za0bnWSKsjZNRKI6IdFMcMnawEGwTqoYiUPBbsPhxcS/vWNK80Rewzhlfkz6kkecEjAoqDleL4F8FLjF/tkoaHqeXYKmAYee5nJq4kPsNI6xwUGt7jScaeG/wi1FHZXVCmofZiLNYiaBCqJ113VS8HOigFPBCtvLNEsJHZI+6xopScy0n08vK/CeIT0cJco8CXhKf/7ISaz1OA5NZ0xgoGe9CfzXEywC3hvNrIfo1M+5TDNgkn5vjzKBIcGT7HCPK0ZBjI0gVHFzAKYDoggFk/Cv8TQOFe8PoLBtE5g7G89fcdNsuEZfHdXPj8roqmgH7aID5KITdI4uUQu1EUX36AE9oifr2Xq13qz379aKVf7ZRr/K+vwChZ2wkQ==</latexit><latexit sha1_base64="CuXvyGt5nQE0FFMe+dam2epzzMc=">AAACRXicbZDNSsNAFIUn9a/Gv6pLN4NFcWNJiqIbQXDjsoLVQhPCZDpph04mYeZGWkJew6dxqz6DD+FOXKrTmoVWLwwcvnPnXu4JU8E1OM6LVZmbX1hcqi7bK6tr6xu1za0bnWSKsjZNRKI6IdFMcMnawEGwTqoYiUPBbsPhxcS/vWNK80Rewzhlfkz6kkecEjAoqDleL4F8FLjF/tkoaHqeXYKmAYee5nJq4kPsNI6xwUGt7jScaeG/wi1FHZXVCmofZiLNYiaBCqJ113VS8HOigFPBCtvLNEsJHZI+6xopScy0n08vK/CeIT0cJco8CXhKf/7ISaz1OA5NZ0xgoGe9CfzXEywC3hvNrIfo1M+5TDNgkn5vjzKBIcGT7HCPK0ZBjI0gVHFzAKYDoggFk/Cv8TQOFe8PoLBtE5g7G89fcdNsuEZfHdXPj8roqmgH7aID5KITdI4uUQu1EUX36AE9oifr2Xq13qz379aKVf7ZRr/K+vwChZ2wkQ==</latexit>
x1 = 4x2 � x1�x21 + x
22 � 4
�
x2 = �4x1 � x2�x21 + x
22 � 4
�<latexit sha1_base64="X8dI3zyxSAEaW5DVrt7CJGD57IY=">AAACdXicfZHNSiNBFIUrPepo+5eZWYpQGBVFot1NQDdCwI3LCEYFO7bVleqkSPUPVbclocnr+Q6+w2xn3Ik3sRcaxQsFH+fWqcs9FWZKGnCcp4r1Y25+4efikr28srq2Xv31+8qkueaizVOV6puQGaFkItogQYmbTAsWh0pch4OzSf/6QWgj0+QSRpnoxKyXyEhyBigF1Xu/m0IxDNzx7mljGHh1ROorEcEe0p13gNqdV2/4Wvb6sO/7dmnw0FBHh4sO7xtHUK05h8606GdwS6iRslpB9QUn8DwWCXDFjLl1nQw6BdMguRJj28+NyBgfsJ64RUxYLEynmCYxpjuodGmUajwJ0Kn63lGw2JhRHOLNmEHfzPYm4pe9yX6yO5wZD9FJp5BJloNI+Nv0KFcUUjrJmnalFhzUCIFxLXEByvtMMw74Ix+e53E4jWts2xiYOxvPZ7jyDl3ki0at2SijWyQbZIvsEZcckyY5Jy3SJpw8kr/kH/lfebY2rW1r9+2qVSk9f8iHso5eAYd6vd8=</latexit><latexit sha1_base64="X8dI3zyxSAEaW5DVrt7CJGD57IY=">AAACdXicfZHNSiNBFIUrPepo+5eZWYpQGBVFot1NQDdCwI3LCEYFO7bVleqkSPUPVbclocnr+Q6+w2xn3Ik3sRcaxQsFH+fWqcs9FWZKGnCcp4r1Y25+4efikr28srq2Xv31+8qkueaizVOV6puQGaFkItogQYmbTAsWh0pch4OzSf/6QWgj0+QSRpnoxKyXyEhyBigF1Xu/m0IxDNzx7mljGHh1ROorEcEe0p13gNqdV2/4Wvb6sO/7dmnw0FBHh4sO7xtHUK05h8606GdwS6iRslpB9QUn8DwWCXDFjLl1nQw6BdMguRJj28+NyBgfsJ64RUxYLEynmCYxpjuodGmUajwJ0Kn63lGw2JhRHOLNmEHfzPYm4pe9yX6yO5wZD9FJp5BJloNI+Nv0KFcUUjrJmnalFhzUCIFxLXEByvtMMw74Ix+e53E4jWts2xiYOxvPZ7jyDl3ki0at2SijWyQbZIvsEZcckyY5Jy3SJpw8kr/kH/lfebY2rW1r9+2qVSk9f8iHso5eAYd6vd8=</latexit><latexit sha1_base64="X8dI3zyxSAEaW5DVrt7CJGD57IY=">AAACdXicfZHNSiNBFIUrPepo+5eZWYpQGBVFot1NQDdCwI3LCEYFO7bVleqkSPUPVbclocnr+Q6+w2xn3Ik3sRcaxQsFH+fWqcs9FWZKGnCcp4r1Y25+4efikr28srq2Xv31+8qkueaizVOV6puQGaFkItogQYmbTAsWh0pch4OzSf/6QWgj0+QSRpnoxKyXyEhyBigF1Xu/m0IxDNzx7mljGHh1ROorEcEe0p13gNqdV2/4Wvb6sO/7dmnw0FBHh4sO7xtHUK05h8606GdwS6iRslpB9QUn8DwWCXDFjLl1nQw6BdMguRJj28+NyBgfsJ64RUxYLEynmCYxpjuodGmUajwJ0Kn63lGw2JhRHOLNmEHfzPYm4pe9yX6yO5wZD9FJp5BJloNI+Nv0KFcUUjrJmnalFhzUCIFxLXEByvtMMw74Ix+e53E4jWts2xiYOxvPZ7jyDl3ki0at2SijWyQbZIvsEZcckyY5Jy3SJpw8kr/kH/lfebY2rW1r9+2qVSk9f8iHso5eAYd6vd8=</latexit><latexit sha1_base64="X8dI3zyxSAEaW5DVrt7CJGD57IY=">AAACdXicfZHNSiNBFIUrPepo+5eZWYpQGBVFot1NQDdCwI3LCEYFO7bVleqkSPUPVbclocnr+Q6+w2xn3Ik3sRcaxQsFH+fWqcs9FWZKGnCcp4r1Y25+4efikr28srq2Xv31+8qkueaizVOV6puQGaFkItogQYmbTAsWh0pch4OzSf/6QWgj0+QSRpnoxKyXyEhyBigF1Xu/m0IxDNzx7mljGHh1ROorEcEe0p13gNqdV2/4Wvb6sO/7dmnw0FBHh4sO7xtHUK05h8606GdwS6iRslpB9QUn8DwWCXDFjLl1nQw6BdMguRJj28+NyBgfsJ64RUxYLEynmCYxpjuodGmUajwJ0Kn63lGw2JhRHOLNmEHfzPYm4pe9yX6yO5wZD9FJp5BJloNI+Nv0KFcUUjrJmnalFhzUCIFxLXEByvtMMw74Ix+e53E4jWts2xiYOxvPZ7jyDl3ki0at2SijWyQbZIvsEZcckyY5Jy3SJpw8kr/kH/lfebY2rW1r9+2qVSk9f8iHso5eAYd6vd8=</latexit>
x1 = x2
x2 = �x1<latexit sha1_base64="IgCscotfUUmtUuF1uz3l/H9N6cE=">AAACNXicbZDLSsNAFIYn9VbjLerSzWBR3FiSUtCNUHDjsoK9QBvCZDpph04uzJxIS+jWp3GrPosLd+LWNxCnbRa29cCBn+/cOL+fCK7Att+Nwtr6xuZWcdvc2d3bP7AOj5oqTiVlDRqLWLZ9opjgEWsAB8HaiWQk9AVr+cPbab31yKTicfQA44S5IelHPOCUgEaehbu9GLKR50zOb0Zepds1c1DR4FJzzyrZZXsWeFU4uSihPOqe9aM30DRkEVBBlOo4dgJuRiRwKtjE7KaKJYQOSZ91tIxIyJSbzT6Z4DNNejiIpc4I8Iz+nchIqNQ49HVnSGCglmtT+G9NsAB4b7R0HoJrN+NRkgKL6Px6kAoMMZ56hXtcMgpirAWhkusHMB0QSShoRxfW09CXvD+AiWlqw5xle1ZFs1J2tL6vlmrV3LoiOkGn6AI56ArV0B2qowai6Ak9oxf0arwZH8an8TVvLRj5zDFaCOP7F0MWqyo=</latexit><latexit sha1_base64="IgCscotfUUmtUuF1uz3l/H9N6cE=">AAACNXicbZDLSsNAFIYn9VbjLerSzWBR3FiSUtCNUHDjsoK9QBvCZDpph04uzJxIS+jWp3GrPosLd+LWNxCnbRa29cCBn+/cOL+fCK7Att+Nwtr6xuZWcdvc2d3bP7AOj5oqTiVlDRqLWLZ9opjgEWsAB8HaiWQk9AVr+cPbab31yKTicfQA44S5IelHPOCUgEaehbu9GLKR50zOb0Zepds1c1DR4FJzzyrZZXsWeFU4uSihPOqe9aM30DRkEVBBlOo4dgJuRiRwKtjE7KaKJYQOSZ91tIxIyJSbzT6Z4DNNejiIpc4I8Iz+nchIqNQ49HVnSGCglmtT+G9NsAB4b7R0HoJrN+NRkgKL6Px6kAoMMZ56hXtcMgpirAWhkusHMB0QSShoRxfW09CXvD+AiWlqw5xle1ZFs1J2tL6vlmrV3LoiOkGn6AI56ArV0B2qowai6Ak9oxf0arwZH8an8TVvLRj5zDFaCOP7F0MWqyo=</latexit><latexit sha1_base64="IgCscotfUUmtUuF1uz3l/H9N6cE=">AAACNXicbZDLSsNAFIYn9VbjLerSzWBR3FiSUtCNUHDjsoK9QBvCZDpph04uzJxIS+jWp3GrPosLd+LWNxCnbRa29cCBn+/cOL+fCK7Att+Nwtr6xuZWcdvc2d3bP7AOj5oqTiVlDRqLWLZ9opjgEWsAB8HaiWQk9AVr+cPbab31yKTicfQA44S5IelHPOCUgEaehbu9GLKR50zOb0Zepds1c1DR4FJzzyrZZXsWeFU4uSihPOqe9aM30DRkEVBBlOo4dgJuRiRwKtjE7KaKJYQOSZ91tIxIyJSbzT6Z4DNNejiIpc4I8Iz+nchIqNQ49HVnSGCglmtT+G9NsAB4b7R0HoJrN+NRkgKL6Px6kAoMMZ56hXtcMgpirAWhkusHMB0QSShoRxfW09CXvD+AiWlqw5xle1ZFs1J2tL6vlmrV3LoiOkGn6AI56ArV0B2qowai6Ak9oxf0arwZH8an8TVvLRj5zDFaCOP7F0MWqyo=</latexit><latexit sha1_base64="IgCscotfUUmtUuF1uz3l/H9N6cE=">AAACNXicbZDLSsNAFIYn9VbjLerSzWBR3FiSUtCNUHDjsoK9QBvCZDpph04uzJxIS+jWp3GrPosLd+LWNxCnbRa29cCBn+/cOL+fCK7Att+Nwtr6xuZWcdvc2d3bP7AOj5oqTiVlDRqLWLZ9opjgEWsAB8HaiWQk9AVr+cPbab31yKTicfQA44S5IelHPOCUgEaehbu9GLKR50zOb0Zepds1c1DR4FJzzyrZZXsWeFU4uSihPOqe9aM30DRkEVBBlOo4dgJuRiRwKtjE7KaKJYQOSZ91tIxIyJSbzT6Z4DNNejiIpc4I8Iz+nchIqNQ49HVnSGCglmtT+G9NsAB4b7R0HoJrN+NRkgKL6Px6kAoMMZ56hXtcMgpirAWhkusHMB0QSShoRxfW09CXvD+AiWlqw5xle1ZFs1J2tL6vlmrV3LoiOkGn6AI56ArV0B2qowai6Ak9oxf0arwZH8an8TVvLRj5zDFaCOP7F0MWqyo=</latexit>
x1 = x2
x2 = � sin x1 � 0.5x2<latexit sha1_base64="CuXvyGt5nQE0FFMe+dam2epzzMc=">AAACRXicbZDNSsNAFIUn9a/Gv6pLN4NFcWNJiqIbQXDjsoLVQhPCZDpph04mYeZGWkJew6dxqz6DD+FOXKrTmoVWLwwcvnPnXu4JU8E1OM6LVZmbX1hcqi7bK6tr6xu1za0bnWSKsjZNRKI6IdFMcMnawEGwTqoYiUPBbsPhxcS/vWNK80Rewzhlfkz6kkecEjAoqDleL4F8FLjF/tkoaHqeXYKmAYee5nJq4kPsNI6xwUGt7jScaeG/wi1FHZXVCmofZiLNYiaBCqJ113VS8HOigFPBCtvLNEsJHZI+6xopScy0n08vK/CeIT0cJco8CXhKf/7ISaz1OA5NZ0xgoGe9CfzXEywC3hvNrIfo1M+5TDNgkn5vjzKBIcGT7HCPK0ZBjI0gVHFzAKYDoggFk/Cv8TQOFe8PoLBtE5g7G89fcdNsuEZfHdXPj8roqmgH7aID5KITdI4uUQu1EUX36AE9oifr2Xq13qz379aKVf7ZRr/K+vwChZ2wkQ==</latexit><latexit sha1_base64="CuXvyGt5nQE0FFMe+dam2epzzMc=">AAACRXicbZDNSsNAFIUn9a/Gv6pLN4NFcWNJiqIbQXDjsoLVQhPCZDpph04mYeZGWkJew6dxqz6DD+FOXKrTmoVWLwwcvnPnXu4JU8E1OM6LVZmbX1hcqi7bK6tr6xu1za0bnWSKsjZNRKI6IdFMcMnawEGwTqoYiUPBbsPhxcS/vWNK80Rewzhlfkz6kkecEjAoqDleL4F8FLjF/tkoaHqeXYKmAYee5nJq4kPsNI6xwUGt7jScaeG/wi1FHZXVCmofZiLNYiaBCqJ113VS8HOigFPBCtvLNEsJHZI+6xopScy0n08vK/CeIT0cJco8CXhKf/7ISaz1OA5NZ0xgoGe9CfzXEywC3hvNrIfo1M+5TDNgkn5vjzKBIcGT7HCPK0ZBjI0gVHFzAKYDoggFk/Cv8TQOFe8PoLBtE5g7G89fcdNsuEZfHdXPj8roqmgH7aID5KITdI4uUQu1EUX36AE9oifr2Xq13qz379aKVf7ZRr/K+vwChZ2wkQ==</latexit><latexit sha1_base64="CuXvyGt5nQE0FFMe+dam2epzzMc=">AAACRXicbZDNSsNAFIUn9a/Gv6pLN4NFcWNJiqIbQXDjsoLVQhPCZDpph04mYeZGWkJew6dxqz6DD+FOXKrTmoVWLwwcvnPnXu4JU8E1OM6LVZmbX1hcqi7bK6tr6xu1za0bnWSKsjZNRKI6IdFMcMnawEGwTqoYiUPBbsPhxcS/vWNK80Rewzhlfkz6kkecEjAoqDleL4F8FLjF/tkoaHqeXYKmAYee5nJq4kPsNI6xwUGt7jScaeG/wi1FHZXVCmofZiLNYiaBCqJ113VS8HOigFPBCtvLNEsJHZI+6xopScy0n08vK/CeIT0cJco8CXhKf/7ISaz1OA5NZ0xgoGe9CfzXEywC3hvNrIfo1M+5TDNgkn5vjzKBIcGT7HCPK0ZBjI0gVHFzAKYDoggFk/Cv8TQOFe8PoLBtE5g7G89fcdNsuEZfHdXPj8roqmgH7aID5KITdI4uUQu1EUX36AE9oifr2Xq13qz379aKVf7ZRr/K+vwChZ2wkQ==</latexit><latexit sha1_base64="CuXvyGt5nQE0FFMe+dam2epzzMc=">AAACRXicbZDNSsNAFIUn9a/Gv6pLN4NFcWNJiqIbQXDjsoLVQhPCZDpph04mYeZGWkJew6dxqz6DD+FOXKrTmoVWLwwcvnPnXu4JU8E1OM6LVZmbX1hcqi7bK6tr6xu1za0bnWSKsjZNRKI6IdFMcMnawEGwTqoYiUPBbsPhxcS/vWNK80Rewzhlfkz6kkecEjAoqDleL4F8FLjF/tkoaHqeXYKmAYee5nJq4kPsNI6xwUGt7jScaeG/wi1FHZXVCmofZiLNYiaBCqJ113VS8HOigFPBCtvLNEsJHZI+6xopScy0n08vK/CeIT0cJco8CXhKf/7ISaz1OA5NZ0xgoGe9CfzXEywC3hvNrIfo1M+5TDNgkn5vjzKBIcGT7HCPK0ZBjI0gVHFzAKYDoggFk/Cv8TQOFe8PoLBtE5g7G89fcdNsuEZfHdXPj8roqmgH7aID5KITdI4uUQu1EUX36AE9oifr2Xq13qz379aKVf7ZRr/K+vwChZ2wkQ==</latexit>
Definition (invariant set). The set M ⇢ Rn is said to be an invariant set if forall y 2 M and t0 � 0, we have
x(t; y , t0) 2 M for all t � t0.<latexit sha1_base64="Xcxwqq1erIhNgU38ru7ZdF57b+U=">AAAC63icbVJNj9MwEHXC1xI+tsCRy4gGqSutqnQvgOCwEhy4rLSg7e5KTalsZ9JYdZxgO6VVlF/BDXHlLyHxZxBOtkK0y5ye3nszYz+blVIYG0W/PP/GzVu37+zdDe7df/Bwv/fo8bkpKs1xzAtZ6EtGDUqhcGyFlXhZaqQ5k3jBFm9b/WKJ2ohCndl1idOczpVIBafWUbPez1gVQiWoLMQWV5al9TtMhRKtDAOhllQL6lSD9qAZwlmGLYTwJDYVa1GcU5sxVn9sPqkQhAFDRQK2AIZAFcSYl1m9NacBkUJaaKBSQriOhYKT0HkTCO0sgniOnyEKD+ELQkaXGMSTYDWwr9eHTj3o3G4pK1Y1/J0CDdiuz1mGQTyd9frRMOoKroPRBvTJpk5nvd9xUvAqd0FwSY2ZjKLSTmuqreASmyCuDJaUL+gcJw4qmqOZ1l3+DTx3TNKdJS3cFTv2346a5sasc+acbVhmV2vJ/2oSUyuS1c56m76cukTLyqLiV9vTSraRty8MidDIrVw7QLl2D8mBZ1RTbt0/2BrPc6bFPLNNELjARrvxXAfnR8ORwx+O+sevNtHtkafkGRmQEXlBjsl7ckrGhHtvPOYtPOnn/lf/m//9yup7m54nZKv8H38AcQHnGg==</latexit><latexit sha1_base64="Xcxwqq1erIhNgU38ru7ZdF57b+U=">AAAC63icbVJNj9MwEHXC1xI+tsCRy4gGqSutqnQvgOCwEhy4rLSg7e5KTalsZ9JYdZxgO6VVlF/BDXHlLyHxZxBOtkK0y5ye3nszYz+blVIYG0W/PP/GzVu37+zdDe7df/Bwv/fo8bkpKs1xzAtZ6EtGDUqhcGyFlXhZaqQ5k3jBFm9b/WKJ2ohCndl1idOczpVIBafWUbPez1gVQiWoLMQWV5al9TtMhRKtDAOhllQL6lSD9qAZwlmGLYTwJDYVa1GcU5sxVn9sPqkQhAFDRQK2AIZAFcSYl1m9NacBkUJaaKBSQriOhYKT0HkTCO0sgniOnyEKD+ELQkaXGMSTYDWwr9eHTj3o3G4pK1Y1/J0CDdiuz1mGQTyd9frRMOoKroPRBvTJpk5nvd9xUvAqd0FwSY2ZjKLSTmuqreASmyCuDJaUL+gcJw4qmqOZ1l3+DTx3TNKdJS3cFTv2346a5sasc+acbVhmV2vJ/2oSUyuS1c56m76cukTLyqLiV9vTSraRty8MidDIrVw7QLl2D8mBZ1RTbt0/2BrPc6bFPLNNELjARrvxXAfnR8ORwx+O+sevNtHtkafkGRmQEXlBjsl7ckrGhHtvPOYtPOnn/lf/m//9yup7m54nZKv8H38AcQHnGg==</latexit><latexit sha1_base64="Xcxwqq1erIhNgU38ru7ZdF57b+U=">AAAC63icbVJNj9MwEHXC1xI+tsCRy4gGqSutqnQvgOCwEhy4rLSg7e5KTalsZ9JYdZxgO6VVlF/BDXHlLyHxZxBOtkK0y5ye3nszYz+blVIYG0W/PP/GzVu37+zdDe7df/Bwv/fo8bkpKs1xzAtZ6EtGDUqhcGyFlXhZaqQ5k3jBFm9b/WKJ2ohCndl1idOczpVIBafWUbPez1gVQiWoLMQWV5al9TtMhRKtDAOhllQL6lSD9qAZwlmGLYTwJDYVa1GcU5sxVn9sPqkQhAFDRQK2AIZAFcSYl1m9NacBkUJaaKBSQriOhYKT0HkTCO0sgniOnyEKD+ELQkaXGMSTYDWwr9eHTj3o3G4pK1Y1/J0CDdiuz1mGQTyd9frRMOoKroPRBvTJpk5nvd9xUvAqd0FwSY2ZjKLSTmuqreASmyCuDJaUL+gcJw4qmqOZ1l3+DTx3TNKdJS3cFTv2346a5sasc+acbVhmV2vJ/2oSUyuS1c56m76cukTLyqLiV9vTSraRty8MidDIrVw7QLl2D8mBZ1RTbt0/2BrPc6bFPLNNELjARrvxXAfnR8ORwx+O+sevNtHtkafkGRmQEXlBjsl7ckrGhHtvPOYtPOnn/lf/m//9yup7m54nZKv8H38AcQHnGg==</latexit><latexit sha1_base64="Xcxwqq1erIhNgU38ru7ZdF57b+U=">AAAC63icbVJNj9MwEHXC1xI+tsCRy4gGqSutqnQvgOCwEhy4rLSg7e5KTalsZ9JYdZxgO6VVlF/BDXHlLyHxZxBOtkK0y5ye3nszYz+blVIYG0W/PP/GzVu37+zdDe7df/Bwv/fo8bkpKs1xzAtZ6EtGDUqhcGyFlXhZaqQ5k3jBFm9b/WKJ2ohCndl1idOczpVIBafWUbPez1gVQiWoLMQWV5al9TtMhRKtDAOhllQL6lSD9qAZwlmGLYTwJDYVa1GcU5sxVn9sPqkQhAFDRQK2AIZAFcSYl1m9NacBkUJaaKBSQriOhYKT0HkTCO0sgniOnyEKD+ELQkaXGMSTYDWwr9eHTj3o3G4pK1Y1/J0CDdiuz1mGQTyd9frRMOoKroPRBvTJpk5nvd9xUvAqd0FwSY2ZjKLSTmuqreASmyCuDJaUL+gcJw4qmqOZ1l3+DTx3TNKdJS3cFTv2346a5sasc+acbVhmV2vJ/2oSUyuS1c56m76cukTLyqLiV9vTSraRty8MidDIrVw7QLl2D8mBZ1RTbt0/2BrPc6bFPLNNELjARrvxXAfnR8ORwx+O+sevNtHtkafkGRmQEXlBjsl7ckrGhHtvPOYtPOnn/lf/m//9yup7m54nZKv8H38AcQHnGg==</latexit>
Remarks:
• The word “largest” refers to the union of all invariant sets within S
• If r = , then the origin is globally asymptotically stable
15
Theorem (Krasovskii-Lasalle). Let V : Rn 7! R be a locally positive definitefunction such that, on the compact set ⌦r = {x 2 R : V (x) r}, we haveV (x) 0. Define
S = {x 2 ⌦r : V (x) = 0}.
As t ! 1, any trajectory starting inside ⌦r converges to the largest invariantset inside S. That is, the ! limit set of any such trajectory is contained insidethe largest infant set in S. In particular, if S contains no invariant set except theequilibrium xe = 0, then the origin is asymptotical stable.
<latexit sha1_base64="uePnm8h+Rm6Gtxi85YAyrJIBGxY=">AAAEhXicbVNbaxNBFN6mqa3x1uqjLwe7Qgtp2BTxUihW9EGxYLVtWujGMDt7Nhk7O7OdmU0TQv6m4H8R8ewmITZ1YOHsuX3fuUWZFNYFwa+lynJ15c7q2t3avfsPHj5a33jcsjo3HE+5ltqcR8yiFApPnXASzzODLI0knkWX7wv7WR+NFVqduGGG7ZR1lUgEZ45UnY2KDpUWKkblIHQ4cFEyOumhNpjC1mfDrO7bSyF2DpllUuL2uAGH6MBv7YUpc70oGn0bf1ckZ9ZpmOt8iBAYSM0pbAiZtsKJPkKMiVDCISS54gUFsDnvgesxVwf6cz0ErtOMcQe2AAq/pNhlHbMfjgahUHOEvdbWYDuUeAUmHPt1uEboMULww1i7UWtMVijNgd+ADwUs1sKL2vE0EcwSwx7MI/aDcNyohW14Z8F3oRHdnmPG6GugkMQNCYepITjDfiB32gzBkt0J1QWhrIhxTtinOhS1vosWqDVFYZIVf45c+8wIpiYlzgKPiecJ9QGErZfufqiLVD5IkYqJr05K/EnP5iSELcAcoxrjWb6bgMkcbYL0SUFWMOc5OdVBJIV6lsWC0gssccAxc2VWvMqFFJEReQr+oIP7gV8SnkxPU9MIhCgxO0wzpwmDyaJPtJMN6KxvBo2gfHBbaE6FTW/6jjrrf2g8PE9pQ7lk1l40g8y1RyV3ieNamFukdblkXbwgUbEUbXtUXsYYnpMmhkQb+qiQUvtvxIilllhG5Fksll20Fcr/2iQmTsSDBXiXvG6PhMpyh4pP0JNcluOn24NYGBoYnUMsGDd0EBx4jxnadbrQG+l5GpW7N67VqGHNxfbcFlq7jSbJX3c3D95MW7fmPfWeeVte03vlHXgfvSPv1OOVn5XfyyvLd6qr1Z3qi+rLiWtlaRrzxLvxqm//AvmfeTk=</latexit><latexit sha1_base64="uePnm8h+Rm6Gtxi85YAyrJIBGxY=">AAAEhXicbVNbaxNBFN6mqa3x1uqjLwe7Qgtp2BTxUihW9EGxYLVtWujGMDt7Nhk7O7OdmU0TQv6m4H8R8ewmITZ1YOHsuX3fuUWZFNYFwa+lynJ15c7q2t3avfsPHj5a33jcsjo3HE+5ltqcR8yiFApPnXASzzODLI0knkWX7wv7WR+NFVqduGGG7ZR1lUgEZ45UnY2KDpUWKkblIHQ4cFEyOumhNpjC1mfDrO7bSyF2DpllUuL2uAGH6MBv7YUpc70oGn0bf1ckZ9ZpmOt8iBAYSM0pbAiZtsKJPkKMiVDCISS54gUFsDnvgesxVwf6cz0ErtOMcQe2AAq/pNhlHbMfjgahUHOEvdbWYDuUeAUmHPt1uEboMULww1i7UWtMVijNgd+ADwUs1sKL2vE0EcwSwx7MI/aDcNyohW14Z8F3oRHdnmPG6GugkMQNCYepITjDfiB32gzBkt0J1QWhrIhxTtinOhS1vosWqDVFYZIVf45c+8wIpiYlzgKPiecJ9QGErZfufqiLVD5IkYqJr05K/EnP5iSELcAcoxrjWb6bgMkcbYL0SUFWMOc5OdVBJIV6lsWC0gssccAxc2VWvMqFFJEReQr+oIP7gV8SnkxPU9MIhCgxO0wzpwmDyaJPtJMN6KxvBo2gfHBbaE6FTW/6jjrrf2g8PE9pQ7lk1l40g8y1RyV3ieNamFukdblkXbwgUbEUbXtUXsYYnpMmhkQb+qiQUvtvxIilllhG5Fksll20Fcr/2iQmTsSDBXiXvG6PhMpyh4pP0JNcluOn24NYGBoYnUMsGDd0EBx4jxnadbrQG+l5GpW7N67VqGHNxfbcFlq7jSbJX3c3D95MW7fmPfWeeVte03vlHXgfvSPv1OOVn5XfyyvLd6qr1Z3qi+rLiWtlaRrzxLvxqm//AvmfeTk=</latexit><latexit sha1_base64="uePnm8h+Rm6Gtxi85YAyrJIBGxY=">AAAEhXicbVNbaxNBFN6mqa3x1uqjLwe7Qgtp2BTxUihW9EGxYLVtWujGMDt7Nhk7O7OdmU0TQv6m4H8R8ewmITZ1YOHsuX3fuUWZFNYFwa+lynJ15c7q2t3avfsPHj5a33jcsjo3HE+5ltqcR8yiFApPnXASzzODLI0knkWX7wv7WR+NFVqduGGG7ZR1lUgEZ45UnY2KDpUWKkblIHQ4cFEyOumhNpjC1mfDrO7bSyF2DpllUuL2uAGH6MBv7YUpc70oGn0bf1ckZ9ZpmOt8iBAYSM0pbAiZtsKJPkKMiVDCISS54gUFsDnvgesxVwf6cz0ErtOMcQe2AAq/pNhlHbMfjgahUHOEvdbWYDuUeAUmHPt1uEboMULww1i7UWtMVijNgd+ADwUs1sKL2vE0EcwSwx7MI/aDcNyohW14Z8F3oRHdnmPG6GugkMQNCYepITjDfiB32gzBkt0J1QWhrIhxTtinOhS1vosWqDVFYZIVf45c+8wIpiYlzgKPiecJ9QGErZfufqiLVD5IkYqJr05K/EnP5iSELcAcoxrjWb6bgMkcbYL0SUFWMOc5OdVBJIV6lsWC0gssccAxc2VWvMqFFJEReQr+oIP7gV8SnkxPU9MIhCgxO0wzpwmDyaJPtJMN6KxvBo2gfHBbaE6FTW/6jjrrf2g8PE9pQ7lk1l40g8y1RyV3ieNamFukdblkXbwgUbEUbXtUXsYYnpMmhkQb+qiQUvtvxIilllhG5Fksll20Fcr/2iQmTsSDBXiXvG6PhMpyh4pP0JNcluOn24NYGBoYnUMsGDd0EBx4jxnadbrQG+l5GpW7N67VqGHNxfbcFlq7jSbJX3c3D95MW7fmPfWeeVte03vlHXgfvSPv1OOVn5XfyyvLd6qr1Z3qi+rLiWtlaRrzxLvxqm//AvmfeTk=</latexit><latexit sha1_base64="uePnm8h+Rm6Gtxi85YAyrJIBGxY=">AAAEhXicbVNbaxNBFN6mqa3x1uqjLwe7Qgtp2BTxUihW9EGxYLVtWujGMDt7Nhk7O7OdmU0TQv6m4H8R8ewmITZ1YOHsuX3fuUWZFNYFwa+lynJ15c7q2t3avfsPHj5a33jcsjo3HE+5ltqcR8yiFApPnXASzzODLI0knkWX7wv7WR+NFVqduGGG7ZR1lUgEZ45UnY2KDpUWKkblIHQ4cFEyOumhNpjC1mfDrO7bSyF2DpllUuL2uAGH6MBv7YUpc70oGn0bf1ckZ9ZpmOt8iBAYSM0pbAiZtsKJPkKMiVDCISS54gUFsDnvgesxVwf6cz0ErtOMcQe2AAq/pNhlHbMfjgahUHOEvdbWYDuUeAUmHPt1uEboMULww1i7UWtMVijNgd+ADwUs1sKL2vE0EcwSwx7MI/aDcNyohW14Z8F3oRHdnmPG6GugkMQNCYepITjDfiB32gzBkt0J1QWhrIhxTtinOhS1vosWqDVFYZIVf45c+8wIpiYlzgKPiecJ9QGErZfufqiLVD5IkYqJr05K/EnP5iSELcAcoxrjWb6bgMkcbYL0SUFWMOc5OdVBJIV6lsWC0gssccAxc2VWvMqFFJEReQr+oIP7gV8SnkxPU9MIhCgxO0wzpwmDyaJPtJMN6KxvBo2gfHBbaE6FTW/6jjrrf2g8PE9pQ7lk1l40g8y1RyV3ieNamFukdblkXbwgUbEUbXtUXsYYnpMmhkQb+qiQUvtvxIilllhG5Fksll20Fcr/2iQmTsSDBXiXvG6PhMpyh4pP0JNcluOn24NYGBoYnUMsGDd0EBx4jxnadbrQG+l5GpW7N67VqGHNxfbcFlq7jSbJX3c3D95MW7fmPfWeeVte03vlHXgfvSPv1OOVn5XfyyvLd6qr1Z3qi+rLiWtlaRrzxLvxqm//AvmfeTk=</latexit>
1<latexit sha1_base64="KfLbUTn34Eqn29GllEC0Gydp8qw=">AAACG3icbZC7TsMwFIadcivhVmBksWiRmKqkC7BVYmEsEr1IbVQ5jtNadZzIPkFEUV+CFXgaNsTKwMsg3DYDbTmSpU//f46P/fuJ4Boc59sqbWxube+Ud+29/YPDo8rxSUfHqaKsTWMRq55PNBNcsjZwEKyXKEYiX7CuP7md+d1HpjSP5QNkCfMiMpI85JSAkXq1AZchZLVhperUnXnhdXALqKKiWsPKzyCIaRoxCVQQrfuuk4CXEwWcCja1B6lmCaETMmJ9g5JETHv5/L1TfGGUAIexMkcCnqt/J3ISaZ1FvumMCIz1qjcT//UEC4EHTyvrIbz2ci6TFJiki+1hKjDEeJYIDrhiFERmgFDFzQcwHRNFKJjclq6nka/4aAxT2zaBuavxrEOnUXcN3zeqzZsiujI6Q+foErnoCjXRHWqhNqJIoGf0gl6tN+vd+rA+F60lq5g5RUtlff0Css6hzQ==</latexit><latexit sha1_base64="KfLbUTn34Eqn29GllEC0Gydp8qw=">AAACG3icbZC7TsMwFIadcivhVmBksWiRmKqkC7BVYmEsEr1IbVQ5jtNadZzIPkFEUV+CFXgaNsTKwMsg3DYDbTmSpU//f46P/fuJ4Boc59sqbWxube+Ud+29/YPDo8rxSUfHqaKsTWMRq55PNBNcsjZwEKyXKEYiX7CuP7md+d1HpjSP5QNkCfMiMpI85JSAkXq1AZchZLVhperUnXnhdXALqKKiWsPKzyCIaRoxCVQQrfuuk4CXEwWcCja1B6lmCaETMmJ9g5JETHv5/L1TfGGUAIexMkcCnqt/J3ISaZ1FvumMCIz1qjcT//UEC4EHTyvrIbz2ci6TFJiki+1hKjDEeJYIDrhiFERmgFDFzQcwHRNFKJjclq6nka/4aAxT2zaBuavxrEOnUXcN3zeqzZsiujI6Q+foErnoCjXRHWqhNqJIoGf0gl6tN+vd+rA+F60lq5g5RUtlff0Css6hzQ==</latexit><latexit sha1_base64="KfLbUTn34Eqn29GllEC0Gydp8qw=">AAACG3icbZC7TsMwFIadcivhVmBksWiRmKqkC7BVYmEsEr1IbVQ5jtNadZzIPkFEUV+CFXgaNsTKwMsg3DYDbTmSpU//f46P/fuJ4Boc59sqbWxube+Ud+29/YPDo8rxSUfHqaKsTWMRq55PNBNcsjZwEKyXKEYiX7CuP7md+d1HpjSP5QNkCfMiMpI85JSAkXq1AZchZLVhperUnXnhdXALqKKiWsPKzyCIaRoxCVQQrfuuk4CXEwWcCja1B6lmCaETMmJ9g5JETHv5/L1TfGGUAIexMkcCnqt/J3ISaZ1FvumMCIz1qjcT//UEC4EHTyvrIbz2ci6TFJiki+1hKjDEeJYIDrhiFERmgFDFzQcwHRNFKJjclq6nka/4aAxT2zaBuavxrEOnUXcN3zeqzZsiujI6Q+foErnoCjXRHWqhNqJIoGf0gl6tN+vd+rA+F60lq5g5RUtlff0Css6hzQ==</latexit><latexit sha1_base64="KfLbUTn34Eqn29GllEC0Gydp8qw=">AAACG3icbZC7TsMwFIadcivhVmBksWiRmKqkC7BVYmEsEr1IbVQ5jtNadZzIPkFEUV+CFXgaNsTKwMsg3DYDbTmSpU//f46P/fuJ4Boc59sqbWxube+Ud+29/YPDo8rxSUfHqaKsTWMRq55PNBNcsjZwEKyXKEYiX7CuP7md+d1HpjSP5QNkCfMiMpI85JSAkXq1AZchZLVhperUnXnhdXALqKKiWsPKzyCIaRoxCVQQrfuuk4CXEwWcCja1B6lmCaETMmJ9g5JETHv5/L1TfGGUAIexMkcCnqt/J3ISaZ1FvumMCIz1qjcT//UEC4EHTyvrIbz2ci6TFJiki+1hKjDEeJYIDrhiFERmgFDFzQcwHRNFKJjclq6nka/4aAxT2zaBuavxrEOnUXcN3zeqzZsiujI6Q+foErnoCjXRHWqhNqJIoGf0gl6tN+vd+rA+F60lq5g5RUtlff0Css6hzQ==</latexit>
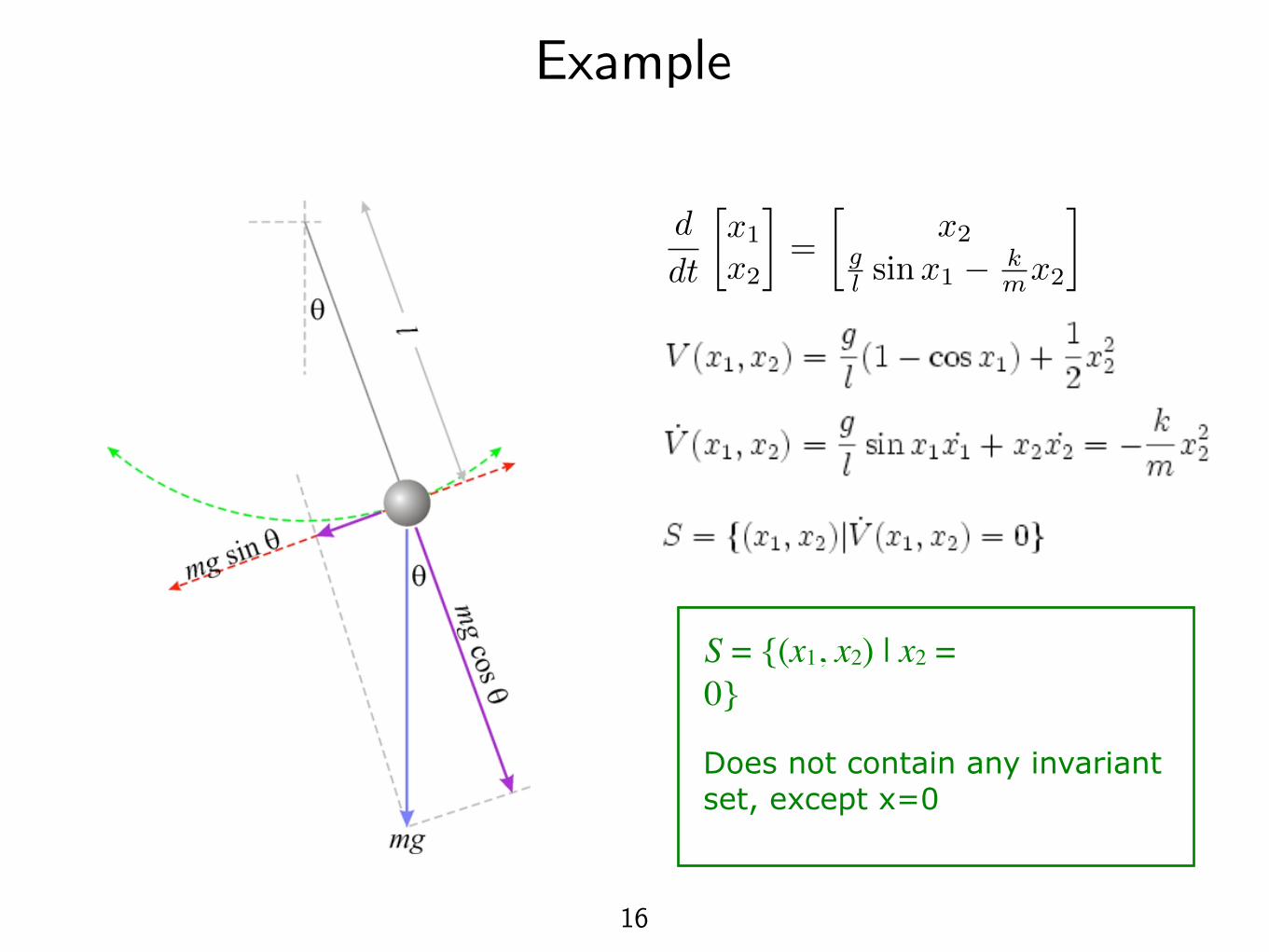
Example
16
S = {(x1, x2) | x2 = 0}
Does not contain any invariant set, except x=0
d
dt
x1
x2
�=
x2
gl sinx1 � k
mx2
�
Related Documents




![Lyapunov Stability Rizki Adi Nugroho [1410501075]](https://static.cupdf.com/doc/110x72/589a2d3a1a28ab051f8b5cbd/lyapunov-stability-rizki-adi-nugroho-1410501075.jpg)




![Appendix A Lyapunov Stability - Springer978-3-642-41572-2/1.pdf · Appendix A Lyapunov Stability Lyapunov stability theory [1] plays a central role in systems theory and engineering.](https://static.cupdf.com/doc/110x72/5ad5ee947f8b9a6d708d794b/appendix-a-lyapunov-stability-springer-978-3-642-41572-21pdfappendix-a-lyapunov.jpg)
