Citation: Huang, X.; Zheng, S.; Zhu, N. High-Throughput Legume Seed Phenotyping Using a Handheld 3D Laser Scanner. Remote Sens. 2022, 14, 431. https://doi.org/10.3390/ rs14020431 Academic Editors: Lorenzo Comba, Jordi Llorens and Alessandro Biglia Received: 20 December 2021 Accepted: 14 January 2022 Published: 17 January 2022 Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affil- iations. Copyright: © 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https:// creativecommons.org/licenses/by/ 4.0/). remote sensing Article High-Throughput Legume Seed Phenotyping Using a Handheld 3D Laser Scanner Xia Huang 1 , Shunyi Zheng 1, * and Ningning Zhu 2 1 School of Remote Sensing and Information Engineering, Wuhan University, Wuhan 430079, China; [email protected] 2 State Key Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing, Wuhan University, Wuhan 430079, China; [email protected] * Correspondence: [email protected] Abstract: High-throughput phenotyping involves many samples and diverse trait types. For the goal of automatic measurement and batch data processing, a novel method for high-throughput legume seed phenotyping is proposed. A pipeline of automatic data acquisition and processing, including point cloud acquisition, single-seed extraction, pose normalization, three-dimensional (3D) reconstruction, and trait estimation, is proposed. First, a handheld laser scanner is used to obtain the legume seed point clouds in batches. Second, a combined segmentation method using the RANSAC method, the Euclidean segmentation method, and the dimensionality of the features is proposed to conduct single-seed extraction. Third, a coordinate rotation method based on PCA and the table normal is proposed to conduct pose normalization. Fourth, a fast symmetry-based 3D reconstruction method is built to reconstruct a 3D model of the single seed, and the Poisson surface reconstruction method is used for surface reconstruction. Finally, 34 traits, including 11 morphological traits, 11 scale factors, and 12 shape factors, are automatically calculated. A total of 2500 samples of five kinds of legume seeds are measured. Experimental results show that the average accuracies of scanning and segmentation are 99.52% and 100%, respectively. The overall average reconstruction error is 0.014 mm. The average morphological trait measurement accuracy is submillimeter, and the average relative percentage error is within 3%. The proposed method provides a feasible method of batch data acquisition and processing, which will facilitate the automation in high-throughput legume seed phenotyping. Keywords: high-throughput; automatic measurement; batch data processing; handheld laser scanner; 3D reconstruction 1. Introduction Legumes, such as soybeans, peas, black beans, red beans, and mung beans, have considerable economic importance and value worldwide [1,2]. The volume, surface area, length, width, thickness, cross-sectional perimeter and area, scale factor, and shape factor of legume seeds are important in the research for legume seed quality evaluation [3,4], optimization breeding [5], and yield evaluation [6]. The consuming and costly conventional manual measurement method using vernier calipers can only measure the length, width, and thickness of the legume seeds. Automatic measurement has great significance in agricultural research [7–9]. High-throughput phenotyping is changing traditional plant measurement [10]. High-throughput legume seed phenotyping involves a wide variety of trait types and massive measurement samples, which require automatic and batch- based data acquisition and processing [11]. For this reason, it is necessary to explore a high-throughput phenotyping method to automatically measure legume seeds. Digital imaging technology is widely used in legume seed trait measurement and has shown utility in high-throughput phenotyping [12]. The length, width, and projected Remote Sens. 2022, 14, 431. https://doi.org/10.3390/rs14020431 https://www.mdpi.com/journal/remotesensing

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
�����������������
Citation: Huang, X.; Zheng, S.; Zhu,
N. High-Throughput Legume Seed
Phenotyping Using a Handheld 3D
Laser Scanner. Remote Sens. 2022, 14,
431. https://doi.org/10.3390/
rs14020431
Academic Editors: Lorenzo Comba,
Jordi Llorens and Alessandro Biglia
Received: 20 December 2021
Accepted: 14 January 2022
Published: 17 January 2022
Publisher’s Note: MDPI stays neutral
with regard to jurisdictional claims in
published maps and institutional affil-
iations.
Copyright: © 2022 by the authors.
Licensee MDPI, Basel, Switzerland.
This article is an open access article
distributed under the terms and
conditions of the Creative Commons
Attribution (CC BY) license (https://
creativecommons.org/licenses/by/
4.0/).
remote sensing
Article
High-Throughput Legume Seed Phenotyping Using aHandheld 3D Laser ScannerXia Huang 1 , Shunyi Zheng 1,* and Ningning Zhu 2
1 School of Remote Sensing and Information Engineering, Wuhan University, Wuhan 430079, China;[email protected]
2 State Key Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing,Wuhan University, Wuhan 430079, China; [email protected]
* Correspondence: [email protected]
Abstract: High-throughput phenotyping involves many samples and diverse trait types. For thegoal of automatic measurement and batch data processing, a novel method for high-throughputlegume seed phenotyping is proposed. A pipeline of automatic data acquisition and processing,including point cloud acquisition, single-seed extraction, pose normalization, three-dimensional (3D)reconstruction, and trait estimation, is proposed. First, a handheld laser scanner is used to obtain thelegume seed point clouds in batches. Second, a combined segmentation method using the RANSACmethod, the Euclidean segmentation method, and the dimensionality of the features is proposedto conduct single-seed extraction. Third, a coordinate rotation method based on PCA and the tablenormal is proposed to conduct pose normalization. Fourth, a fast symmetry-based 3D reconstructionmethod is built to reconstruct a 3D model of the single seed, and the Poisson surface reconstructionmethod is used for surface reconstruction. Finally, 34 traits, including 11 morphological traits, 11 scalefactors, and 12 shape factors, are automatically calculated. A total of 2500 samples of five kindsof legume seeds are measured. Experimental results show that the average accuracies of scanningand segmentation are 99.52% and 100%, respectively. The overall average reconstruction error is0.014 mm. The average morphological trait measurement accuracy is submillimeter, and the averagerelative percentage error is within 3%. The proposed method provides a feasible method of batchdata acquisition and processing, which will facilitate the automation in high-throughput legume seedphenotyping.
Keywords: high-throughput; automatic measurement; batch data processing; handheld laser scanner;3D reconstruction
1. Introduction
Legumes, such as soybeans, peas, black beans, red beans, and mung beans, haveconsiderable economic importance and value worldwide [1,2]. The volume, surface area,length, width, thickness, cross-sectional perimeter and area, scale factor, and shape factorof legume seeds are important in the research for legume seed quality evaluation [3,4],optimization breeding [5], and yield evaluation [6]. The consuming and costly conventionalmanual measurement method using vernier calipers can only measure the length, width,and thickness of the legume seeds. Automatic measurement has great significance inagricultural research [7–9]. High-throughput phenotyping is changing traditional plantmeasurement [10]. High-throughput legume seed phenotyping involves a wide varietyof trait types and massive measurement samples, which require automatic and batch-based data acquisition and processing [11]. For this reason, it is necessary to explore ahigh-throughput phenotyping method to automatically measure legume seeds.
Digital imaging technology is widely used in legume seed trait measurement andhas shown utility in high-throughput phenotyping [12]. The length, width, and projected
Remote Sens. 2022, 14, 431. https://doi.org/10.3390/rs14020431 https://www.mdpi.com/journal/remotesensing
Remote Sens. 2022, 14, 431 2 of 21
perimeter and area can be acquired using 2D orthophotos [13–15]. ImageJ [16], CellPro-filer [17], WinSEEDLE [18], SmartGrain [19], and P-TRAP [20] are open-source programsthat can quickly estimate 2D traits of the seeds based on digital imaging technology. How-ever, it is difficult for digital imaging technology to obtain 3D traits, such as volume, surfacearea, and thickness.
Vision technology and 3D reconstruction technology are applied in various engineer-ing fields. Chen et al. [21] studied the 3D perception of orchard banana central stockenhanced by adaptive multivision technology. Lin et al. [22] detected the spherical orcylindrical fruits on plants in natural environments and guided harvesting robots to pickthem automatically using a color-, depth- and shape-based 3D fruit detection method.Measurement using three-dimensional (3D) technology is an active area of research inagriculture [23]. It can be applied in measurements of leaf area, leaf angle, stem and shoots,fruit, and seeds [24,25]. In addition to conventional 2D traits, such as length, width, and theprojected perimeter and area, 3D technology can obtain additional traits, such as volume,surface area, thickness, and other shape traits. Structure from motion (SFM) is a good wayto get a plant 3D point cloud [26]. The impact of camera viewing angles for estimatingagricultural parameters from 3D point clouds has been discussed in detail [27,28]. Wenet al. [29] took between 30 minutes to 1 hour to capture the point cloud of a single seedusing a SmartSCAN3D-5.0M color 3D scanner together with an S-030 camera. The processproduced a detailed 3D model of a single corn seed. Roussel et al. [30] reconstructed a3D seed shape from silhouettes and calculated the seed volume. Li et al. [31] used com-bined data from four viewpoints to obtain a complete 3D point cloud of a single rice seed.Length, width, thickness, and volume were automatically extracted. In the aforementionedresearch, it took a long time to get the 3D data of a single seed. Due to the large samplesizes involved in high-throughput phenotyping analysis, it is necessary to explore fasterand more automated batch data processing methods.
It is difficult to obtain complete point cloud data when scanning seeds in batches [32].Therefore, the current goal for high-throughput phenotyping of legume seeds using 3Dtechnology is the batch-based rapid 3D reconstruction of legume seeds with large samples.The key algorithm in batch data processing in seed measurement based on point clouds isthe point cloud completion approach. In addition to the existing 3D traits, it is meaningful toextract additional 3D traits and shape factors, especially traits of transverse and longitudinalprofiles that are hardly discussed in previous works in this area.
Soybeans, peas, black beans, red beans, and mung beans are typical legume seeds,which are important foods around the world. High-throughput legume seed phenotypingis very valuable and can facilitate easier evaluation of legume seed yield and quality.Legume seeds come in a variety of shapes and sizes. The common ones are approximatelyspherical or ellipsoidal [33]. Examples of spherical legume seeds are soybeans and peas [34].Examples of ellipsoidal legume seeds are black beans, red beans, and mung beans [35].Spherical or elliptical seeds are symmetrical, a property that can be taken advantage of forrapid batch 3D modeling.
In our previous work measuring the kernel traits of grains, the traits were measuredon an incomplete point cloud [36]. The point cloud completion problem was ignored. Theautomatic cloud completion problem will be handled in this work. A novel method forhigh-throughput legume seed phenotyping using a handheld 3D laser scanner is proposedin this paper. The objective of this method is to achieve automatic measurement and batchdata processing. A single 3D seed model and 34 traits will be obtained automatically. Ahandheld laser scanner (RigelScan Elite) will be used to obtain incomplete point clouds oflegume seeds in batches. An automatic data processing pipeline of single-seed extraction,pose normalization, 3D reconstruction, and trait estimation is proposed. A complete 3Dmodel of a single seed based on the incomplete point cloud of legume seeds obtained inbatches can be quickly acquired. A total of 34 traits can be automatically measured. Themain contribution of this paper is to propose an automatic batch measurement method
Remote Sens. 2022, 14, 431 3 of 21
for high-throughput legume seed phenotyping. The proposed method is for seeds withsymmetrical shapes.
2. Materials and Methods
In this experiment, 2500 different samples of 5 common dry legume seeds, soybeans,peas, black beans, red beans, and mung beans, were used as experiment objects (500 samplesof each). A handheld 3D laser scanner was used for the acquisition of 3D point clouds,and a pipeline of data processing, including single-seed extraction, pose normalization, 3Dreconstruction, and trait estimation, was proposed. First, a combined segmentation methodusing the RANSAC (random sample consensus) plane detection method, the Euclideansegmentation method, and the dimensional features was proposed to conduct single-seedextraction. Second, a coordinate rotation method based on PCA (principal componentanalysis) and the table normal was proposed to conduct pose normalization. Third, a fast3D reconstruction method based on the seeds’ symmetries was built to reconstruct the 3Dmodel from the incomplete point clouds obtained in batches. Then the Poisson surfacereconstruction method was used for surface reconstruction. Finally, 11 morphological traits,11 scale factors, and 12 shape factors were automatically calculated. The morphologicaltraits are volume, surface area, length, width, thickness, and the perimeter and cross-section area of three principal component profiles. The scale factors and shape factors arecalculated based on morphological traits. The flowchart for this high-throughput legumeseed phenotyping method is shown in Figure 1.
Remote Sens. 2022, 14, x FOR PEER REVIEW 3 of 22
method for high-throughput legume seed phenotyping. The proposed method is for seeds
with symmetrical shapes.
2. Materials and Methods
In this experiment, 2500 different samples of 5 common dry legume seeds, soybeans,
peas, black beans, red beans, and mung beans, were used as experiment objects (500 sam-
ples of each). A handheld 3D laser scanner was used for the acquisition of 3D point clouds,
and a pipeline of data processing, including single-seed extraction, pose normalization,
3D reconstruction, and trait estimation, was proposed. First, a combined segmentation
method using the RANSAC (random sample consensus) plane detection method, the Eu-
clidean segmentation method, and the dimensional features was proposed to conduct sin-
gle-seed extraction. Second, a coordinate rotation method based on PCA (principal com-
ponent analysis) and the table normal was proposed to conduct pose normalization.
Third, a fast 3D reconstruction method based on the seeds’ symmetries was built to recon-
struct the 3D model from the incomplete point clouds obtained in batches. Then the Pois-
son surface reconstruction method was used for surface reconstruction. Finally, 11 mor-
phological traits, 11 scale factors, and 12 shape factors were automatically calculated. The
morphological traits are volume, surface area, length, width, thickness, and the perimeter
and cross-section area of three principal component profiles. The scale factors and shape
factors are calculated based on morphological traits. The flowchart for this high-through-
put legume seed phenotyping method is shown in Figure 1.
Figure 1. Flowchart for high-throughput legume seed phenotyping.
2.1. Data Acquisition and Processing Environment
Soybeans, peas, black beans, red beans, and mung beans were tested. These materials
were common dry legume seeds purchased from the market and were of good quality
without shriveled seeds. Each kind had uniform samples of similar size and shape. Data
acquisition was performed using a handheld 3D laser scanner (RigelScan Elite made by
Zhongguan Automation Technology Co., Ltd., Wuhan, China) in Wuhan, China, in Sep-
tember 2021. The data acquisition was conducted indoors. The RigelScan Elite scanner’s
working principle is the triangulation method, which is a noncontact measurement
method that uses a laser light-emitting diode. The light is focused and projected onto the
target through a lens, and the reflected or diffused laser light is imaged according to a
certain triangle relationship to obtain the location and spatial information of the target.
The RigelScan Elite scanner has 11 pairs of cross-scanning laser beams, 1 deep-hole scan-
ning laser beam, and 5 scanning laser beams. The basic parameters of RigelScan Elite are
shown in Table 1.
Each kind of legume seed was sorted into batches, and all the seeds in a batch were
scanned at once. There were no overlapped, pasted, and attached seeds. The seeds were
on the table and scanned using RigelScan Elite (Figure 2a). Some reflective marker points
for point cloud stitching between multiple frames were pasted on the table to assist in the
Leg
um
e seeds
Po
int clo
ud
acqu
isition
Sin
gle seed
extractio
n
Po
se no
rmalizatio
n
3D reco
nstru
ction
Trait estim
ation
3D m
od
el and
traits ou
tpu
t
Figure 1. Flowchart for high-throughput legume seed phenotyping.
2.1. Data Acquisition and Processing Environment
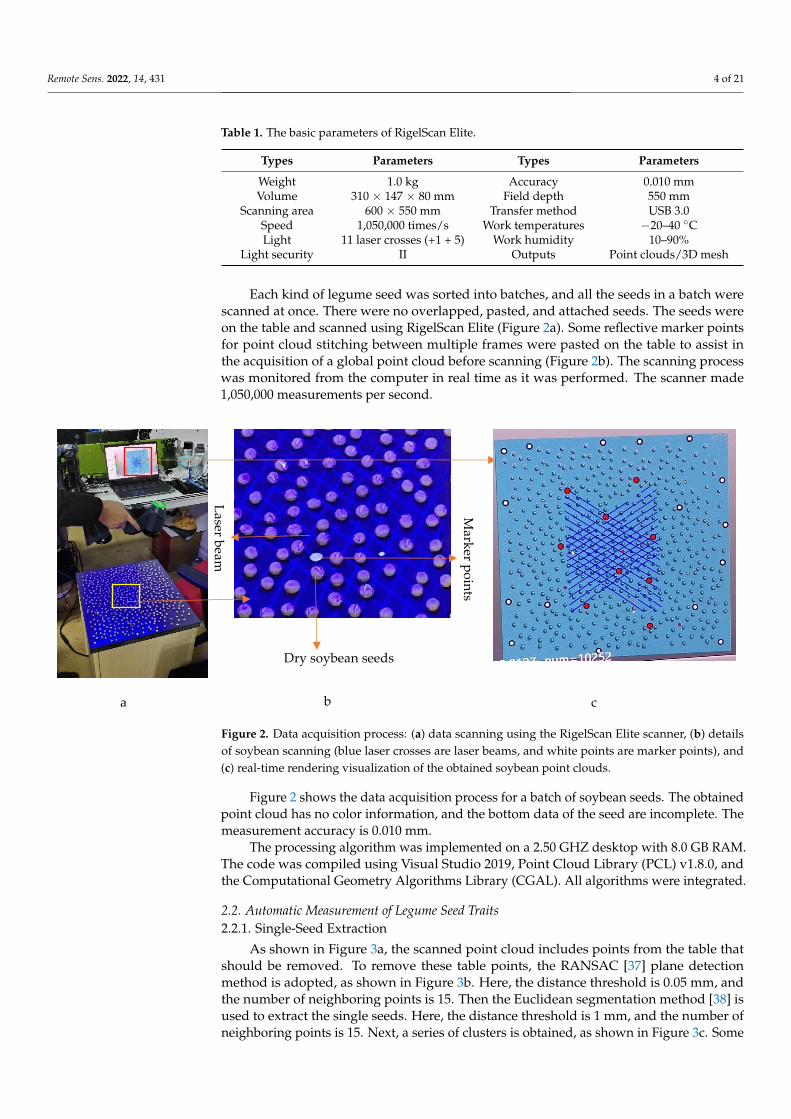
Soybeans, peas, black beans, red beans, and mung beans were tested. These materialswere common dry legume seeds purchased from the market and were of good qualitywithout shriveled seeds. Each kind had uniform samples of similar size and shape. Dataacquisition was performed using a handheld 3D laser scanner (RigelScan Elite madeby Zhongguan Automation Technology Co., Ltd., Wuhan, China) in Wuhan, China, inSeptember 2021. The data acquisition was conducted indoors. The RigelScan Elite scanner’sworking principle is the triangulation method, which is a noncontact measurement methodthat uses a laser light-emitting diode. The light is focused and projected onto the targetthrough a lens, and the reflected or diffused laser light is imaged according to a certaintriangle relationship to obtain the location and spatial information of the target. TheRigelScan Elite scanner has 11 pairs of cross-scanning laser beams, 1 deep-hole scanninglaser beam, and 5 scanning laser beams. The basic parameters of RigelScan Elite are shownin Table 1.
Remote Sens. 2022, 14, 431 4 of 21
Table 1. The basic parameters of RigelScan Elite.
Types Parameters Types Parameters
Weight 1.0 kg Accuracy 0.010 mmVolume 310 × 147 × 80 mm Field depth 550 mm
Scanning area 600 × 550 mm Transfer method USB 3.0Speed 1,050,000 times/s Work temperatures −20–40 ◦CLight 11 laser crosses (+1 + 5) Work humidity 10–90%
Light security II Outputs Point clouds/3D mesh
Each kind of legume seed was sorted into batches, and all the seeds in a batch werescanned at once. There were no overlapped, pasted, and attached seeds. The seeds wereon the table and scanned using RigelScan Elite (Figure 2a). Some reflective marker pointsfor point cloud stitching between multiple frames were pasted on the table to assist inthe acquisition of a global point cloud before scanning (Figure 2b). The scanning processwas monitored from the computer in real time as it was performed. The scanner made1,050,000 measurements per second.
Remote Sens. 2022, 14, x FOR PEER REVIEW 4 of 24
acquisition of a global point cloud before scanning (Figure 2b). The scanning process was
monitored from the computer in real time as it was performed. The scanner made
1,050,000 measurements per second.
Figure 2 shows the data acquisition process for a batch of soybean seeds. The ob-
tained point cloud has no color information, and the bottom data of the seed are incom-
plete. The measurement accuracy is 0.010 mm.
Table 1. The basic parameters of RigelScan Elite.
Types Parameters Types Parameters
Weight 1.0 kg Accuracy 0.010 mm
Volume 310 × 147 × 80 mm Field depth 550 mm
Scanning area 600 × 550 mm Transfer method USB 3.0
Speed 1,050,000 times/s Work temperatures −20–40 °C
Light 11 laser crosses (+1 +
5) Work humidity 10–90%
Light security ΙΙ Outputs Point clouds/3D mesh
a b c
Laser b
eam
Mark
er po
ints
Dry soybean seeds
a b c
Laser b
eam
Mark
er po
ints
Dry soybean seeds
Figure 2. Data acquisition process: (a) data scanning using the RigelScan Elite scanner, (b) detailsof soybean scanning (blue laser crosses are laser beams, and white points are marker points), and(c) real-time rendering visualization of the obtained soybean point clouds.
Figure 2 shows the data acquisition process for a batch of soybean seeds. The obtainedpoint cloud has no color information, and the bottom data of the seed are incomplete. Themeasurement accuracy is 0.010 mm.
The processing algorithm was implemented on a 2.50 GHZ desktop with 8.0 GB RAM.The code was compiled using Visual Studio 2019, Point Cloud Library (PCL) v1.8.0, andthe Computational Geometry Algorithms Library (CGAL). All algorithms were integrated.
2.2. Automatic Measurement of Legume Seed Traits2.2.1. Single-Seed Extraction
As shown in Figure 3a, the scanned point cloud includes points from the table thatshould be removed. To remove these table points, the RANSAC [37] plane detectionmethod is adopted, as shown in Figure 3b. Here, the distance threshold is 0.05 mm, andthe number of neighboring points is 15. Then the Euclidean segmentation method [38] isused to extract the single seeds. Here, the distance threshold is 1 mm, and the number ofneighboring points is 15. Next, a series of clusters is obtained, as shown in Figure 3c. Some

Remote Sens. 2022, 14, 431 5 of 21
clusters of the table edge points are preserved. This is because some side table points willbe scanned during the data acquisition. The point clouds of the clusters of preserved tablepoints are mainly linear or planar. Then the dimensional features [39] are used to removethese preserved table points. Performing PCA [40] on each cluster, the eigenvalues of thethree principal component dimensions, λ1, λ2, and λ3 (λ1 > λ2 > λ3), can be obtained. Thenthe dimensions of each point cloud are calculated as follows:
a1D =λ1 − λ2
λ1 , a2D =λ2 − λ3
λ1 , and a3D =λ3
λ1 , (1)
where a1D is a one-dimensional linear feature, a2D is a 2D planar feature, a3D is a 3Dscattered point feature, and a1D + a2D + a3D = 1. Using these dimensional features of a pointcloud, we can classify the point clouds as linear, planar, or 3D. A point cloud is linear whena1D is the largest and λ1 >> λ2, λ3. A point cloud is planar when a2D is the largest and λ1,λ2 >> λ3. A point cloud is 3D when a3D is the largest and λ1 ≈ λ2 ≈ λ3. This classificationof the points using dimensional features allows us to remove the table points (Figure 3d).
Remote Sens. 2022, 14, x FOR PEER REVIEW 5 of 22
be scanned during the data acquisition. The point clouds of the clusters of preserved table
points are mainly linear or planar. Then the dimensional features [39] are used to remove
these preserved table points. Performing PCA [40] on each cluster, the eigenvalues of the
three principal component dimensions, λ1, λ2, and λ3 (λ1 > λ2 > λ3), can be obtained. Then
the dimensions of each point cloud are calculated as follows:
1 21D
1
a
−= , 2 3
2D
1
a
−= , and 3
3D
1
a
= , (1)
where a1D is a one-dimensional linear feature, a2D is a 2D planar feature, a3D is a 3D scat-
tered point feature, and a1D + a2D + a3D = 1. Using these dimensional features of a point
cloud, we can classify the point clouds as linear, planar, or 3D. A point cloud is linear
when a1D is the largest and λ1 >> λ2, λ3. A point cloud is planar when a2D is the largest and
λ1, λ2 >> λ3. A point cloud is 3D when a3D is the largest and λ1 ≈ λ2 ≈ λ3. This classification
of the points using dimensional features allows us to remove the table points (Figure 3d).
(a) (b) (c) (d) (e)
Figure 3. The process of single-seed segmentation: (a) the scanned point cloud of the soybean seeds,
(b) the removal of table points after RANSAC plane detection, (c) the clusters after Euclidean seg-
mentation, (d) the clusters after dimensional feature detection, and (e) single-seed segmentation re-
sult of several samples (the incomplete scanned point cloud without seed data facing the table).
2.2.2. Pose Normalization
Normalizing the measurement pose of the individual seeds simplifies the calculation
of the seeds’ traits. Here, PCA is used to perform a coordinate rotation, and the normal
vector of the table is used to rectify the Y-axis direction. Performing PCA processing on
the table point cloud and seed point cloud, the eigenvectors of the table point cloud (eg1,
eg2, and eg3) and the eigenvectors of the seed point cloud (ev1, ev2, and ev3) are obtained.
Then the coordinate rotation matrix R = [r1, r2, r3] can be calculated, where r1 = ev1 × eg2 ×
eg2, r2 = eg3 and r3 = ev1 × eg2.
The single-seed measurement poses in the world coordinate system are normalized
after the coordinate rotation. The geometric center of the scanned point cloud of the seed
is where the origin of the world coordinate system is. The table plane is horizontal to the
X-axis direction and perpendicular to the Y-axis direction of the world coordinate system.
The length, width, and thickness of the seed are, respectively, in the X-, Z-, and Y-axis
directions of the world coordinate system, as shown in Figure 4.
Figure 3. The process of single-seed segmentation: (a) the scanned point cloud of the soybeanseeds, (b) the removal of table points after RANSAC plane detection, (c) the clusters after Euclideansegmentation, (d) the clusters after dimensional feature detection, and (e) single-seed segmentationresult of several samples (the incomplete scanned point cloud without seed data facing the table).
2.2.2. Pose Normalization
Normalizing the measurement pose of the individual seeds simplifies the calculationof the seeds’ traits. Here, PCA is used to perform a coordinate rotation, and the normalvector of the table is used to rectify the Y-axis direction. Performing PCA processing on thetable point cloud and seed point cloud, the eigenvectors of the table point cloud (eg1, eg2,and eg3) and the eigenvectors of the seed point cloud (ev1, ev2, and ev3) are obtained. Thenthe coordinate rotation matrix R = [r1, r2, r3] can be calculated, where r1 = ev1 × eg2 × eg2,r2 = eg3 and r3 = ev1 × eg2.
The single-seed measurement poses in the world coordinate system are normalizedafter the coordinate rotation. The geometric center of the scanned point cloud of the seedis where the origin of the world coordinate system is. The table plane is horizontal to theX-axis direction and perpendicular to the Y-axis direction of the world coordinate system.The length, width, and thickness of the seed are, respectively, in the X-, Z-, and Y-axisdirections of the world coordinate system, as shown in Figure 4.
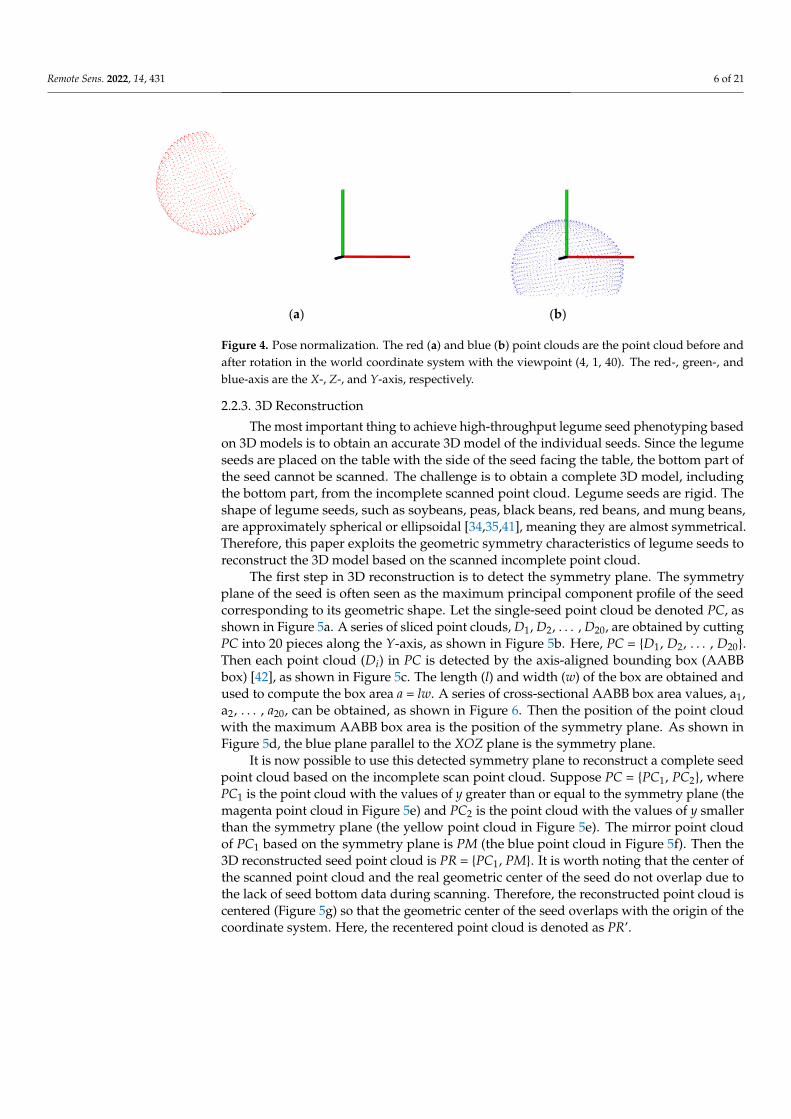
Remote Sens. 2022, 14, 431 6 of 21Remote Sens. 2022, 14, x FOR PEER REVIEW 6 of 22
(a) (b)
Figure 4. Pose normalization. The red (a) and blue (b) point clouds are the point cloud before and
after rotation in the world coordinate system with the viewpoint (4, 1, 40). The red-, green-, and
blue-axis are the X-, Z-, and Y-axis, respectively.
2.2.3. 3D Reconstruction
The most important thing to achieve high-throughput legume seed phenotyping
based on 3D models is to obtain an accurate 3D model of the individual seeds. Since the
legume seeds are placed on the table with the side of the seed facing the table, the bottom
part of the seed cannot be scanned. The challenge is to obtain a complete 3D model,
including the bottom part, from the incomplete scanned point cloud. Legume seeds are
rigid. The shape of legume seeds, such as soybeans, peas, black beans, red beans, and
mung beans, are approximately spherical or ellipsoidal [34,35,41], meaning they are
almost symmetrical. Therefore, this paper exploits the geometric symmetry characteristics
of legume seeds to reconstruct the 3D model based on the scanned incomplete point cloud.
The first step in 3D reconstruction is to detect the symmetry plane. The symmetry
plane of the seed is often seen as the maximum principal component profile of the seed
corresponding to its geometric shape. Let the single-seed point cloud be denoted PC, as
shown in Figure 5a. A series of sliced point clouds, D1, D2, …, D20, are obtained by cutting
PC into 20 pieces along the Y-axis, as shown in Figure 5b. Here, PC = {D1, D2, …, D20}. Then
each point cloud (Di) in PC is detected by the axis-aligned bounding box (AABB box) [42],
as shown in Figure 5c. The length (l) and width (w) of the box are obtained and used to
compute the box area a = lw. A series of cross-sectional AABB box area values, a1, a2, …,
a20, can be obtained, as shown in Figure 6. Then the position of the point cloud with the
maximum AABB box area is the position of the symmetry plane. As shown in Figure 5d,
the blue plane parallel to the XOZ plane is the symmetry plane.
It is now possible to use this detected symmetry plane to reconstruct a complete seed
point cloud based on the incomplete scan point cloud. Suppose PC = {PC1, PC2}, where PC1
is the point cloud with the values of y greater than or equal to the symmetry plane (the
magenta point cloud in Figure 5e) and PC2 is the point cloud with the values of y smaller
than the symmetry plane (the yellow point cloud in Figure 5e). The mirror point cloud of
PC1 based on the symmetry plane is PM (the blue point cloud in Figure 5f). Then the 3D
reconstructed seed point cloud is PR = {PC1, PM}. It is worth noting that the center of the
scanned point cloud and the real geometric center of the seed do not overlap due to the
lack of seed bottom data during scanning. Therefore, the reconstructed point cloud is
centered (Figure 5g) so that the geometric center of the seed overlaps with the origin of
the coordinate system. Here, the recentered point cloud is denoted as PR’.
Surface reconstruction is necessary to measure the volume and surface area. Here,
the Poisson surface reconstruction method [43] is adopted. Poisson surface reconstruction
is based on the Poisson equation, which is an implicit surface reconstruction and can be
calculated by:
Figure 4. Pose normalization. The red (a) and blue (b) point clouds are the point cloud before andafter rotation in the world coordinate system with the viewpoint (4, 1, 40). The red-, green-, andblue-axis are the X-, Z-, and Y-axis, respectively.
2.2.3. 3D Reconstruction
The most important thing to achieve high-throughput legume seed phenotyping basedon 3D models is to obtain an accurate 3D model of the individual seeds. Since the legumeseeds are placed on the table with the side of the seed facing the table, the bottom part ofthe seed cannot be scanned. The challenge is to obtain a complete 3D model, includingthe bottom part, from the incomplete scanned point cloud. Legume seeds are rigid. Theshape of legume seeds, such as soybeans, peas, black beans, red beans, and mung beans,are approximately spherical or ellipsoidal [34,35,41], meaning they are almost symmetrical.Therefore, this paper exploits the geometric symmetry characteristics of legume seeds toreconstruct the 3D model based on the scanned incomplete point cloud.
The first step in 3D reconstruction is to detect the symmetry plane. The symmetryplane of the seed is often seen as the maximum principal component profile of the seedcorresponding to its geometric shape. Let the single-seed point cloud be denoted PC, asshown in Figure 5a. A series of sliced point clouds, D1, D2, . . . , D20, are obtained by cuttingPC into 20 pieces along the Y-axis, as shown in Figure 5b. Here, PC = {D1, D2, . . . , D20}.Then each point cloud (Di) in PC is detected by the axis-aligned bounding box (AABBbox) [42], as shown in Figure 5c. The length (l) and width (w) of the box are obtained andused to compute the box area a = lw. A series of cross-sectional AABB box area values, a1,a2, . . . , a20, can be obtained, as shown in Figure 6. Then the position of the point cloudwith the maximum AABB box area is the position of the symmetry plane. As shown inFigure 5d, the blue plane parallel to the XOZ plane is the symmetry plane.
It is now possible to use this detected symmetry plane to reconstruct a complete seedpoint cloud based on the incomplete scan point cloud. Suppose PC = {PC1, PC2}, wherePC1 is the point cloud with the values of y greater than or equal to the symmetry plane (themagenta point cloud in Figure 5e) and PC2 is the point cloud with the values of y smallerthan the symmetry plane (the yellow point cloud in Figure 5e). The mirror point cloudof PC1 based on the symmetry plane is PM (the blue point cloud in Figure 5f). Then the3D reconstructed seed point cloud is PR = {PC1, PM}. It is worth noting that the center ofthe scanned point cloud and the real geometric center of the seed do not overlap due tothe lack of seed bottom data during scanning. Therefore, the reconstructed point cloud iscentered (Figure 5g) so that the geometric center of the seed overlaps with the origin of thecoordinate system. Here, the recentered point cloud is denoted as PR’.

Remote Sens. 2022, 14, 431 7 of 21
Remote Sens. 2022, 14, x FOR PEER REVIEW 7 of 22
2 2 2
2 2 2f
x y z
=
+ +
, (2)
where x, y, and z are the coordinate values of the points, and φ is a real-valued function
that is twice differentiable in x, y, and z. Poisson surface reconstruction has the advantages
of both global fitting and local fitting. Figure 5h–j shows the wireframe, triangle mesh,
and surface visualization of the soybean seed’s 3D model constructed with the Poisson
surface reconstruction method.
(a) (b) (c) (d) (e)
(f) (g) (h) (i) (j)
Figure 5. The 3D model reconstruction process: (a) the scanned point cloud after pose normalization;
(b) the sliced point clouds; (c) the AABB box of one sliced point cloud; (d) the symmetry plane; (e)
the point clouds on both sides of the symmetry plane; (f) the reconstructed point cloud; (g) the cen-
tered reconstructed point cloud; and (h–j) the wireframe, triangle mesh, and surface visualization
of the soybean seed’s 3D model built by the Poisson surface reconstruction method.
Figure 6. The symmetry plane detection based on the box area of the sliced point clouds. The posi-
tion of the red point with the maximum box area is the position of the symmetry plane.
2.2.4. Trait Estimation
Morphological traits, scale factors, and shape factors are often used to describe seed
size and shape. According to the related research [44–47], 11 morphological traits, 11 scale
factors, and 12 shape factors are measured in this paper. These are listed in Tables 2 and
3.
As shown in Figure 7a, the 3D seed model is triangular meshed. The seed volume (V)
can be regarded as the volume of a closed space enclosed by this triangular mesh, which
is the sum of the projected volumes of all the triangular patches.
0
20
40
60
80
0 5 10 15 20
AA
BB
bo
x ar
ea (
mm
2 )
The sliced point cloud ID
Figure 5. The 3D model reconstruction process: (a) the scanned point cloud after pose normalization;(b) the sliced point clouds; (c) the AABB box of one sliced point cloud; (d) the symmetry plane; (e) thepoint clouds on both sides of the symmetry plane; (f) the reconstructed point cloud; (g) the centeredreconstructed point cloud; and (h–j) the wireframe, triangle mesh, and surface visualization of thesoybean seed’s 3D model built by the Poisson surface reconstruction method.
Remote Sens. 2022, 14, x FOR PEER REVIEW 7 of 22
2 2 2
2 2 2f
x y z
=
+ +
, (2)
where x, y, and z are the coordinate values of the points, and φ is a real-valued function
that is twice differentiable in x, y, and z. Poisson surface reconstruction has the advantages
of both global fitting and local fitting. Figure 5h–j shows the wireframe, triangle mesh,
and surface visualization of the soybean seed’s 3D model constructed with the Poisson
surface reconstruction method.
(a) (b) (c) (d) (e)
(f) (g) (h) (i) (j)
Figure 5. The 3D model reconstruction process: (a) the scanned point cloud after pose normalization;
(b) the sliced point clouds; (c) the AABB box of one sliced point cloud; (d) the symmetry plane; (e)
the point clouds on both sides of the symmetry plane; (f) the reconstructed point cloud; (g) the cen-
tered reconstructed point cloud; and (h–j) the wireframe, triangle mesh, and surface visualization
of the soybean seed’s 3D model built by the Poisson surface reconstruction method.
Figure 6. The symmetry plane detection based on the box area of the sliced point clouds. The posi-
tion of the red point with the maximum box area is the position of the symmetry plane.
2.2.4. Trait Estimation
Morphological traits, scale factors, and shape factors are often used to describe seed
size and shape. According to the related research [44–47], 11 morphological traits, 11 scale
factors, and 12 shape factors are measured in this paper. These are listed in Tables 2 and
3.
As shown in Figure 7a, the 3D seed model is triangular meshed. The seed volume (V)
can be regarded as the volume of a closed space enclosed by this triangular mesh, which
is the sum of the projected volumes of all the triangular patches.
0
20
40
60
80
0 5 10 15 20
AA
BB
bo
x ar
ea (
mm
2 )
The sliced point cloud ID
Figure 6. The symmetry plane detection based on the box area of the sliced point clouds. The positionof the red point with the maximum box area is the position of the symmetry plane.
Surface reconstruction is necessary to measure the volume and surface area. Here,the Poisson surface reconstruction method [43] is adopted. Poisson surface reconstructionis based on the Poisson equation, which is an implicit surface reconstruction and can becalculated by:
f =∂2 ϕ
∂x2 +∂2 ϕ
∂y2 +∂2 ϕ
∂z2 , (2)
where x, y, and z are the coordinate values of the points, and ϕ is a real-valued functionthat is twice differentiable in x, y, and z. Poisson surface reconstruction has the advantagesof both global fitting and local fitting. Figure 5h–j shows the wireframe, triangle mesh, andsurface visualization of the soybean seed’s 3D model constructed with the Poisson surfacereconstruction method.
2.2.4. Trait Estimation
Morphological traits, scale factors, and shape factors are often used to describe seedsize and shape. According to the related research [44–47], 11 morphological traits, 11 scalefactors, and 12 shape factors are measured in this paper. These are listed in Tables 2 and 3.

Remote Sens. 2022, 14, 431 8 of 21
Table 2. Morphological traits. Sym.: symbols of the traits.
NO. Traits Sym.
1 Volume V2 Surface area S3 Length L4 Width W5 Thickness H6 Horizontal profile perimeter C17 Transverse profile perimeter C28 Longitudinal profile perimeter C39 Horizontal profile cross-section area A110 Transverse profile cross-section area A211 Longitudinal profile cross-section area A3
Table 3. Scale factors and shape factors.
NO. Scale Factors NO. Shape Factors
1 W/L 1 XZsf 1 = 4πA1/C12
2 H/L 2 XZsf 2 = A1/L3
3 H/W 3 XZsf 3 = 4A1/πL2
4 L/S 4 XZsf 4 = A1/LW5 L/V 5 XYsf 1 = 4πA2/C2
2
6 W/S 6 XYsf 2 = A2/L3
7 W/V 7 XYsf 3 = 4A2/πL2
8 H/S 8 XYsf 4 = A2/LW9 H/V 9 YZsf 1 = 4πA3/C3
2
10 A/V 10 YZsf 2 = A3/L3
11 V/LWH 11 YZsf 3 = 4A3/πW2
W/L 12 YZsf 4 = A3/WH
As shown in Figure 7a, the 3D seed model is triangular meshed. The seed volume (V)can be regarded as the volume of a closed space enclosed by this triangular mesh, which isthe sum of the projected volumes of all the triangular patches.
V =n
∑i=1
(−1)MV(∆i), (3)
where n is the number of triangles on the surface mesh, M is the direction of the trianglenormal vector, and V(∆i) is the projected volume of the i-th triangle. The projected volumeof a triangle can be seen as a convex pentahedron. Supposing a projection plane that doesnot intersect with all triangles in the mesh model, the projected volume is the volume ofthe convex pentahedron enclosed by the triangles and the projection plane. As shown inFigure 7b, a convex pentahedron, P1P2P3P01P02P03, can be divided into three tetrahedrons,and the volume of the convex pentahedron is:
V(∆i) = V(P01P1P3P2 + P01P2P3P03) ,+P01P2P03P02 (4)
where P1, P2, and P3 are the three vertices of the i-th triangle, and P01, P02, and P03 are theprojection vertices of P1, P2, and P3 on the projection plane. If (x1, y1, z1), (x2, y2, z2), (x3, y3,z3), and (x4, y4, z4) are four vertices of a tetrahedron, the volume of the tetrahedron can becalculated by:
V((x1, y1, z1), (x2, y2, z2), (x3, y3, z3), (x4, y4, z4))
= 16 |
x2 − x1 x3 − x1 x4 − x1y2 − y1 y3 − y1 y4 − y1z2 − z1 z3 − z1 z4 − z1
| . (5)
Remote Sens. 2022, 14, 431 9 of 21
Remote Sens. 2022, 14, x FOR PEER REVIEW 9 of 22
Table 2. Morphological traits. Sym.: symbols of the traits.
NO. Traits Sym.
1 Volume V
2 Surface area S
3 Length L
4 Width W
5 Thickness H
6 Horizontal profile perimeter C1
7 Transverse profile perimeter C2
8 Longitudinal profile perimeter C3
9 Horizontal profile cross-section area A1
10 Transverse profile cross-section area A2
11 Longitudinal profile cross-section area A3
Table 3. Scale factors and shape factors.
NO. Scale Factors NO. Shape Factors
1 W/L 1 XZsf1 = 4πA1/C12
2 H/L 2 XZsf2 = A1/L3
3 H/W 3 XZsf3 = 4A1/πL2
4 L/S 4 XZsf4 = A1/LW
5 L/V 5 XYsf1 = 4πA2/C22
6 W/S 6 XYsf2 = A2/L3
7 W/V 7 XYsf3 = 4A2/πL2
8 H/S 8 XYsf4 = A2/LW
9 H/V 9 YZsf1 = 4πA3/C32
10 A/V 10 YZsf2 = A3/L3
11 V/LWH 11 YZsf3 = 4A3/πW2
W/L 12 YZsf4 = A3/WH
X axis
Y axis
Z axis
(a) (b) (c)
(d) (e) (f)
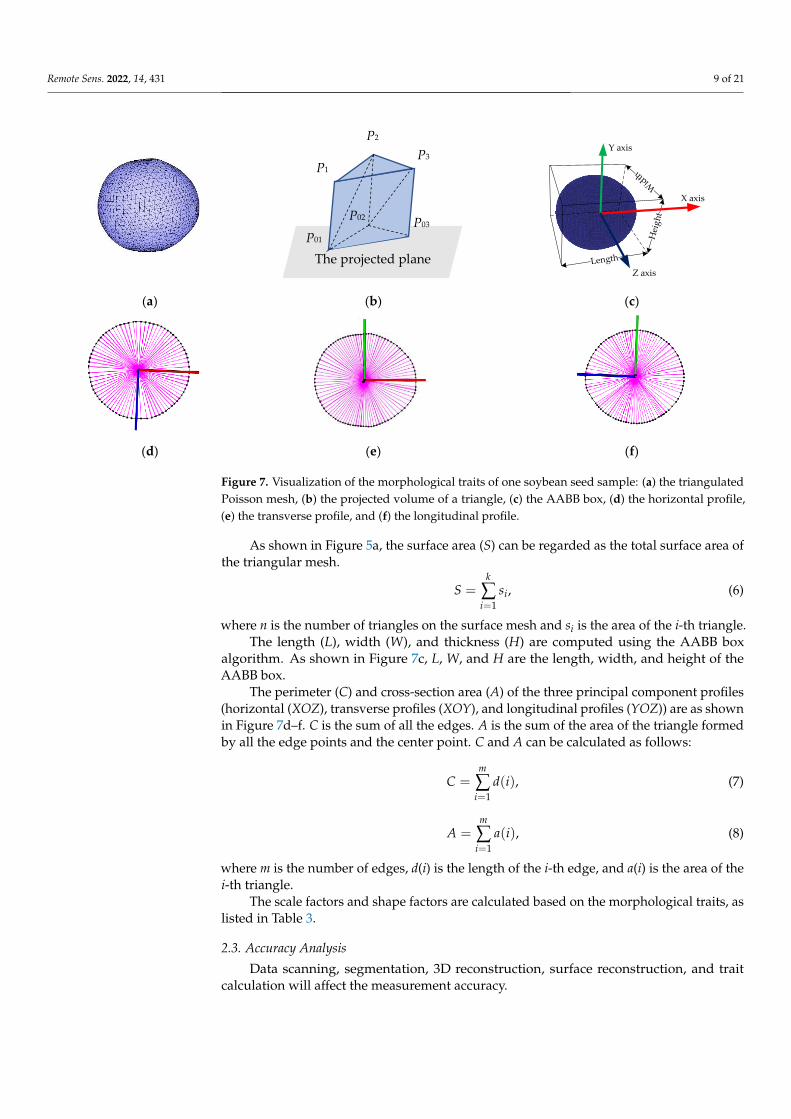
Figure 7. Visualization of the morphological traits of one soybean seed sample: (a) the triangulated
Poisson mesh, (b) the projected volume of a triangle, (c) the AABB box, (d) the horizontal profile,
(e) the transverse profile, and (f) the longitudinal profile.
The projected plane
P2
P1 P3
P01 P03
P02
Figure 7. Visualization of the morphological traits of one soybean seed sample: (a) the triangulatedPoisson mesh, (b) the projected volume of a triangle, (c) the AABB box, (d) the horizontal profile,(e) the transverse profile, and (f) the longitudinal profile.
As shown in Figure 5a, the surface area (S) can be regarded as the total surface area ofthe triangular mesh.
S =k
∑i=1
si, (6)
where n is the number of triangles on the surface mesh and si is the area of the i-th triangle.The length (L), width (W), and thickness (H) are computed using the AABB box
algorithm. As shown in Figure 7c, L, W, and H are the length, width, and height of theAABB box.
The perimeter (C) and cross-section area (A) of the three principal component profiles(horizontal (XOZ), transverse profiles (XOY), and longitudinal profiles (YOZ)) are as shownin Figure 7d–f. C is the sum of all the edges. A is the sum of the area of the triangle formedby all the edge points and the center point. C and A can be calculated as follows:
C =m
∑i=1
d(i), (7)
A =m
∑i=1
a(i), (8)
where m is the number of edges, d(i) is the length of the i-th edge, and a(i) is the area of thei-th triangle.
The scale factors and shape factors are calculated based on the morphological traits, aslisted in Table 3.
2.3. Accuracy Analysis
Data scanning, segmentation, 3D reconstruction, surface reconstruction, and traitcalculation will affect the measurement accuracy.

Remote Sens. 2022, 14, 431 10 of 21
The scanning accuracy (R_scan) and segmentation accuracy (R_seg) are calculated asfollows:
R_scan =N2
N1× 100% and R_seg =
N3
N2× 100%, (9)
where N1, N2, and N3 are the numbers of total seeds, scanned seeds, and automaticallyextracted seeds, respectively.
Since the shape of the seed is not perfectly symmetrical, there will be a certain errorbetween the reconstructed point cloud and the true point cloud. The error is defined asfollows:
Er =1n
n
∑i=1
dcloset(Pi, Pmj), (10)
where n is the number of the true point cloud, and dclosest (Pi, Pmj) is the distance betweenthe true point Pi and the closest reconstructed point Pmj. The value of dclosest (Pi, Pmj) canreflect the deviation between the true point cloud and the reconstructed point cloud. If thepoint cloud is perfectly symmetrical, then Pi and Pmj are completely coincident, and dclosest(Pi, Pmj) = 0.
The mean absolute error (MAE), mean relative error (MRE), root mean square error(RMSE), and correlation coefficient (R) between the measured values and the true valuesare used to verify the accuracy of measurement traits.
MAE =1n
n
∑i=1|xai − xmi|, (11)
MRE =1n
n
∑i=1
|xai − xmi|xmi
× 100%, (12)
RMSE =
√1n
n
∑i=1
(xai − xmi)2, (13)
R(xai, xmi) =Cov(xai, xmi)√
Var[xai]Var[xmi], (14)
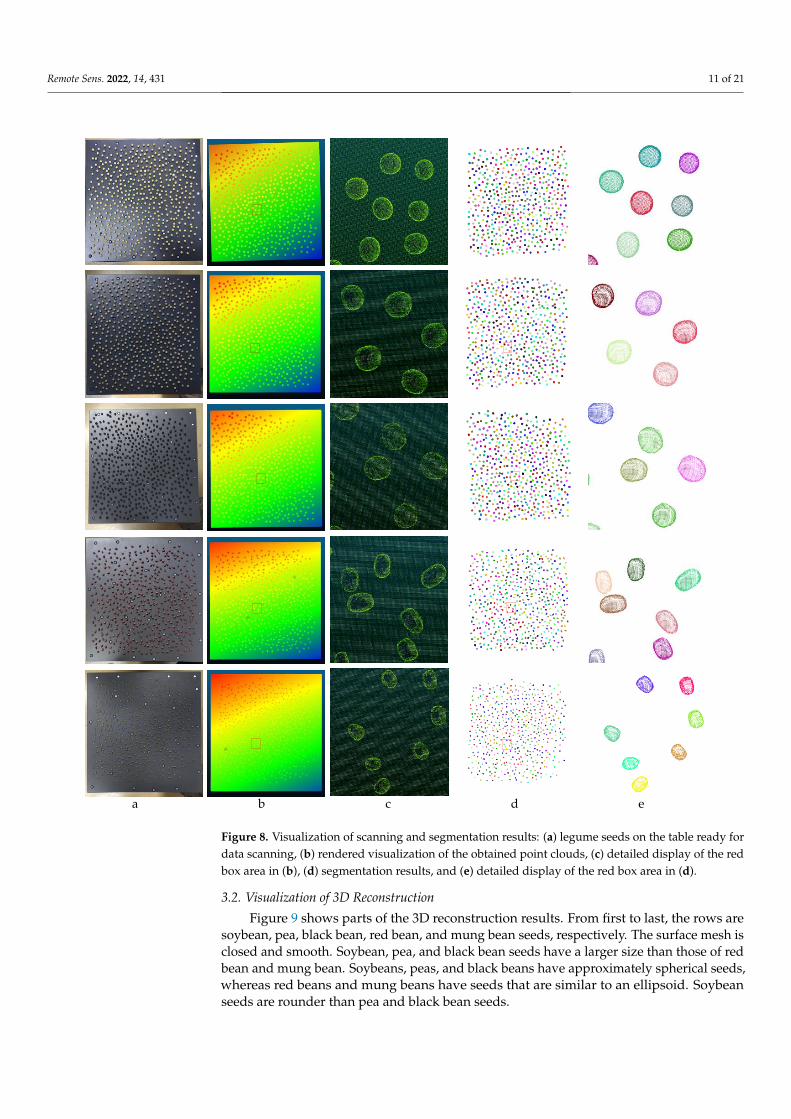
3. Results3.1. Visualization of Scanning and Segmentation Results
Figure 8 shows the scanning and segmentation results of soybeans, peas, black beans,red beans, and mung beans. As shown in Figure 8a, each kind is scanned at once in abatch. The point clouds of most legume seeds are successfully obtained, and the acquiredpoint cloud has no seed bottom data, as shown in Figure 8c. All successfully scanned pointclouds are successfully segmented, as shown in Figure 8d. It should be noted that theobtained point cloud is with no color information, and the scanned results in Figure 8b,care rendered for effective visualization because of the 0.01 mm high-density point cloud.
Remote Sens. 2022, 14, 431 11 of 21Remote Sens. 2022, 14, x FOR PEER REVIEW 11 of 22
Figure 8. Visualization of scanning and segmentation results: (a) legume seeds on the table ready
for data scanning, (b) rendered visualization of the obtained point clouds, (c) detailed display of the
red box area in (b), (d) segmentation results, and (e) detailed display of the red box area in (d).
3.2. Visualization of 3D Reconstruction
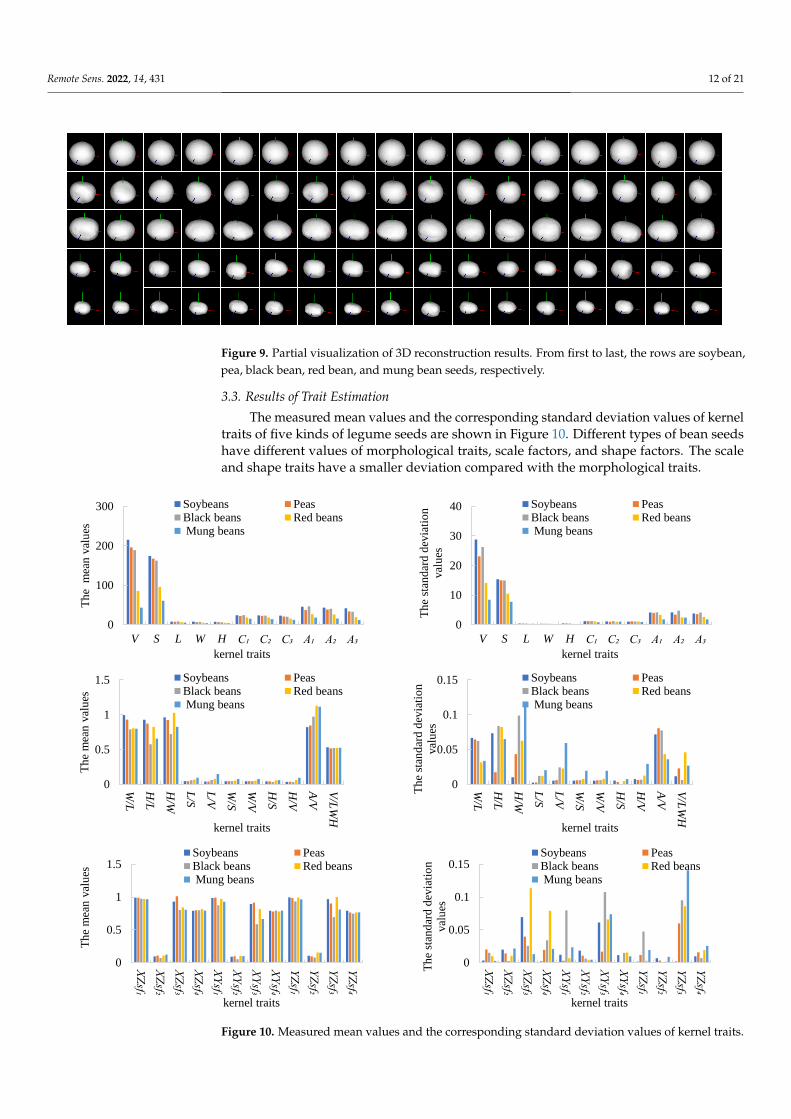
Figure 9 shows parts of the 3D reconstruction results. From first to last, the rows are
soybean, pea, black bean, red bean, and mung bean seeds, respectively. The surface mesh
is closed and smooth. Soybean, pea, and black bean seeds have a larger size than those of
red bean and mung bean. Soybeans, peas, and black beans have approximately spherical
b d c a e
Figure 8. Visualization of scanning and segmentation results: (a) legume seeds on the table ready fordata scanning, (b) rendered visualization of the obtained point clouds, (c) detailed display of the redbox area in (b), (d) segmentation results, and (e) detailed display of the red box area in (d).
3.2. Visualization of 3D Reconstruction
Figure 9 shows parts of the 3D reconstruction results. From first to last, the rows aresoybean, pea, black bean, red bean, and mung bean seeds, respectively. The surface mesh isclosed and smooth. Soybean, pea, and black bean seeds have a larger size than those of redbean and mung bean. Soybeans, peas, and black beans have approximately spherical seeds,whereas red beans and mung beans have seeds that are similar to an ellipsoid. Soybeanseeds are rounder than pea and black bean seeds.
Remote Sens. 2022, 14, 431 12 of 21
Remote Sens. 2022, 14, x FOR PEER REVIEW 12 of 22
seeds, whereas red beans and mung beans have seeds that are similar to an ellipsoid.
Soybean seeds are rounder than pea and black bean seeds.
Figure 9. Partial visualization of 3D reconstruction results. From first to last, the rows are soybean,
pea, black bean, red bean, and mung bean seeds, respectively.
3.3. Results of Trait Estimation
The measured mean values and the corresponding standard deviation values of ker-
nel traits of five kinds of legume seeds are shown in Figure 10. Different types of bean
seeds have different values of morphological traits, scale factors, and shape factors. The
scale and shape traits have a smaller deviation compared with the morphological traits.
0
100
200
300
V S L W H C₁ C₂ C₃ A₁ A₂ A₃
Th
e m
ean
val
ues
kernel traits
Soybeans PeasBlack beans Red beans Mung beans
0
10
20
30
40
V S L W H C₁ C₂ C₃ A₁ A₂ A₃
Th
e st
and
ard
dev
iati
on
val
ues
kernel traits
Soybeans PeasBlack beans Red beans Mung beans
0
0.5
1
1.5
W/L
H/L
H/W
L/S
L/V
W/S
W/V
H/S
H/V
A/V
V/L
WH
Th
em
ean
val
ues
kernel traits
Soybeans PeasBlack beans Red beans Mung beans
0
0.05
0.1
0.15
W/L
H/L
H/W
L/S
L/V
W/S
W/V
H/S
H/V
A/V
V/L
WH
Th
e st
and
ard
dev
iati
on
val
ues
kernel traits
Soybeans PeasBlack beans Red beans Mung beans
Figure 9. Partial visualization of 3D reconstruction results. From first to last, the rows are soybean,pea, black bean, red bean, and mung bean seeds, respectively.
3.3. Results of Trait Estimation
The measured mean values and the corresponding standard deviation values of kerneltraits of five kinds of legume seeds are shown in Figure 10. Different types of bean seedshave different values of morphological traits, scale factors, and shape factors. The scaleand shape traits have a smaller deviation compared with the morphological traits.
Remote Sens. 2022, 14, x FOR PEER REVIEW 12 of 22
seeds, whereas red beans and mung beans have seeds that are similar to an ellipsoid.
Soybean seeds are rounder than pea and black bean seeds.
Figure 9. Partial visualization of 3D reconstruction results. From first to last, the rows are soybean,
pea, black bean, red bean, and mung bean seeds, respectively.
3.3. Results of Trait Estimation
The measured mean values and the corresponding standard deviation values of ker-
nel traits of five kinds of legume seeds are shown in Figure 10. Different types of bean
seeds have different values of morphological traits, scale factors, and shape factors. The
scale and shape traits have a smaller deviation compared with the morphological traits.
0
100
200
300
V S L W H C₁ C₂ C₃ A₁ A₂ A₃
Th
e m
ean
val
ues
kernel traits
Soybeans PeasBlack beans Red beans Mung beans
0
10
20
30
40
V S L W H C₁ C₂ C₃ A₁ A₂ A₃
Th
e st
and
ard
dev
iati
on
val
ues
kernel traits
Soybeans PeasBlack beans Red beans Mung beans
0
0.5
1
1.5
W/L
H/L
H/W
L/S
L/V
W/S
W/V
H/S
H/V
A/V
V/L
WH
Th
em
ean
val
ues
kernel traits
Soybeans PeasBlack beans Red beans Mung beans
0
0.05
0.1
0.15
W/L
H/L
H/W
L/S
L/V
W/S
W/V
H/S
H/V
A/V
V/L
WH
Th
e st
and
ard
dev
iati
on
val
ues
kernel traits
Soybeans PeasBlack beans Red beans Mung beans
Remote Sens. 2022, 14, x FOR PEER REVIEW 13 of 22
Figure 10. Measured mean values and the corresponding standard deviation values of kernel traits.
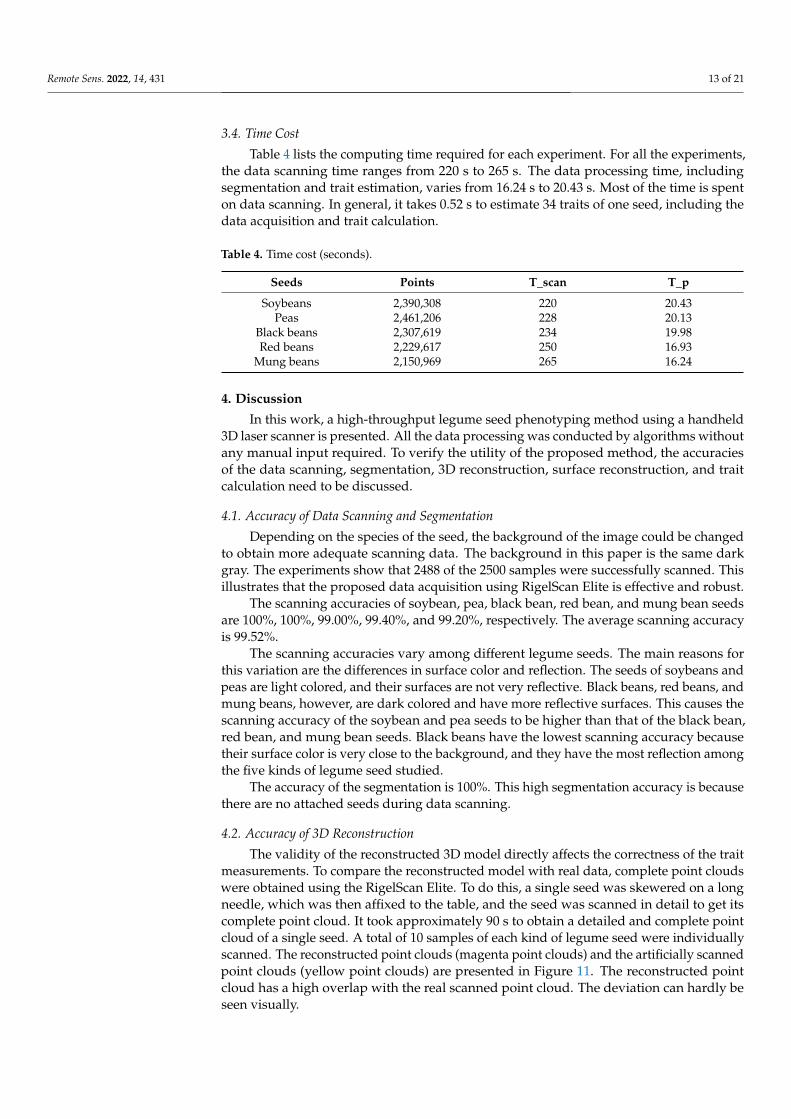
3.4. Time Cost
Table 4 lists the computing time required for each experiment. For all the experi-
ments, the data scanning time ranges from 220 s to 265 s. The data processing time, in-
cluding segmentation and trait estimation, varies from 16.24 s to 20.43 s. Most of the time
is spent on data scanning. In general, it takes 0.52 s to estimate 34 traits of one seed, in-
cluding the data acquisition and trait calculation.
Table 4. Time cost (seconds).
Seeds Points T_scan T_p
Soybeans 2,390,308 220 20.43
Peas 2,461,206 228 20.13
Black beans 2,307,619 234 19.98
Red beans 2,229,617 250 16.93
Mung beans 2,150,969 265 16.24
4. Discussion
In this work, a high-throughput legume seed phenotyping method using a handheld
3D laser scanner is presented. All the data processing was conducted by algorithms with-
out any manual input required. To verify the utility of the proposed method, the accura-
cies of the data scanning, segmentation, 3D reconstruction, surface reconstruction, and
trait calculation need to be discussed.
4.1. Accuracy of Data Scanning and Segmentation
Depending on the species of the seed, the background of the image could be changed
to obtain more adequate scanning data. The background in this paper is the same dark
gray. The experiments show that 2488 of the 2500 samples were successfully scanned. This
illustrates that the proposed data acquisition using RigelScan Elite is effective and robust.
The scanning accuracies of soybean, pea, black bean, red bean, and mung bean seeds
are 100%, 100%, 99.00%, 99.40%, and 99.20%, respectively. The average scanning accuracy
is 99.52%.
The scanning accuracies vary among different legume seeds. The main reasons for
this variation are the differences in surface color and reflection. The seeds of soybeans and
peas are light colored, and their surfaces are not very reflective. Black beans, red beans,
and mung beans, however, are dark colored and have more reflective surfaces. This causes
the scanning accuracy of the soybean and pea seeds to be higher than that of the black
bean, red bean, and mung bean seeds. Black beans have the lowest scanning accuracy
because their surface color is very close to the background, and they have the most reflec-
tion among the five kinds of legume seed studied.
The accuracy of the segmentation is 100%. This high segmentation accuracy is be-
cause there are no attached seeds during data scanning.
0
0.5
1
1.5
XZsf₁
XZsf₂
XZsf₃
XZsf₄
XYsf₁
XYsf₂
XYsf₃
XYsf₄
YZsf₁
YZsf₂
YZsf₃
YZsf₄
Th
e m
ean
val
ues
kernel traits
Soybeans PeasBlack beans Red beans Mung beans
0
0.05
0.1
0.15
XZsf₁
XZsf₂
XZsf₃
XZsf₄
XYsf₁
XYsf₂
XYsf₃
XYsf₄
YZsf₁
YZsf₂
YZsf₃
YZsf₄
Th
e st
and
ard
dev
iati
on
val
ues
kernel traits
Soybeans PeasBlack beans Red beans Mung beans
Figure 10. Measured mean values and the corresponding standard deviation values of kernel traits.
Remote Sens. 2022, 14, 431 13 of 21
3.4. Time Cost
Table 4 lists the computing time required for each experiment. For all the experiments,the data scanning time ranges from 220 s to 265 s. The data processing time, includingsegmentation and trait estimation, varies from 16.24 s to 20.43 s. Most of the time is spenton data scanning. In general, it takes 0.52 s to estimate 34 traits of one seed, including thedata acquisition and trait calculation.
Table 4. Time cost (seconds).
Seeds Points T_scan T_p
Soybeans 2,390,308 220 20.43Peas 2,461,206 228 20.13
Black beans 2,307,619 234 19.98Red beans 2,229,617 250 16.93
Mung beans 2,150,969 265 16.24
4. Discussion
In this work, a high-throughput legume seed phenotyping method using a handheld3D laser scanner is presented. All the data processing was conducted by algorithms withoutany manual input required. To verify the utility of the proposed method, the accuraciesof the data scanning, segmentation, 3D reconstruction, surface reconstruction, and traitcalculation need to be discussed.
4.1. Accuracy of Data Scanning and Segmentation
Depending on the species of the seed, the background of the image could be changedto obtain more adequate scanning data. The background in this paper is the same darkgray. The experiments show that 2488 of the 2500 samples were successfully scanned. Thisillustrates that the proposed data acquisition using RigelScan Elite is effective and robust.
The scanning accuracies of soybean, pea, black bean, red bean, and mung bean seedsare 100%, 100%, 99.00%, 99.40%, and 99.20%, respectively. The average scanning accuracyis 99.52%.
The scanning accuracies vary among different legume seeds. The main reasons forthis variation are the differences in surface color and reflection. The seeds of soybeans andpeas are light colored, and their surfaces are not very reflective. Black beans, red beans, andmung beans, however, are dark colored and have more reflective surfaces. This causes thescanning accuracy of the soybean and pea seeds to be higher than that of the black bean,red bean, and mung bean seeds. Black beans have the lowest scanning accuracy becausetheir surface color is very close to the background, and they have the most reflection amongthe five kinds of legume seed studied.
The accuracy of the segmentation is 100%. This high segmentation accuracy is becausethere are no attached seeds during data scanning.
4.2. Accuracy of 3D Reconstruction
The validity of the reconstructed 3D model directly affects the correctness of the traitmeasurements. To compare the reconstructed model with real data, complete point cloudswere obtained using the RigelScan Elite. To do this, a single seed was skewered on a longneedle, which was then affixed to the table, and the seed was scanned in detail to get itscomplete point cloud. It took approximately 90 s to obtain a detailed and complete pointcloud of a single seed. A total of 10 samples of each kind of legume seed were individuallyscanned. The reconstructed point clouds (magenta point clouds) and the artificially scannedpoint clouds (yellow point clouds) are presented in Figure 11. The reconstructed pointcloud has a high overlap with the real scanned point cloud. The deviation can hardly beseen visually.
Remote Sens. 2022, 14, 431 14 of 21
Remote Sens. 2022, 14, x FOR PEER REVIEW 14 of 22
4.2. Accuracy of 3D Reconstruction
The validity of the reconstructed 3D model directly affects the correctness of the trait
measurements. To compare the reconstructed model with real data, complete point clouds
were obtained using the RigelScan Elite. To do this, a single seed was skewered on a long
needle, which was then affixed to the table, and the seed was scanned in detail to get its
complete point cloud. It took approximately 90 s to obtain a detailed and complete point
cloud of a single seed. A total of 10 samples of each kind of legume seed were individually
scanned. The reconstructed point clouds (magenta point clouds) and the artificially
scanned point clouds (yellow point clouds) are presented in Figure 11. The reconstructed
point cloud has a high overlap with the real scanned point cloud. The deviation can hardly
be seen visually.
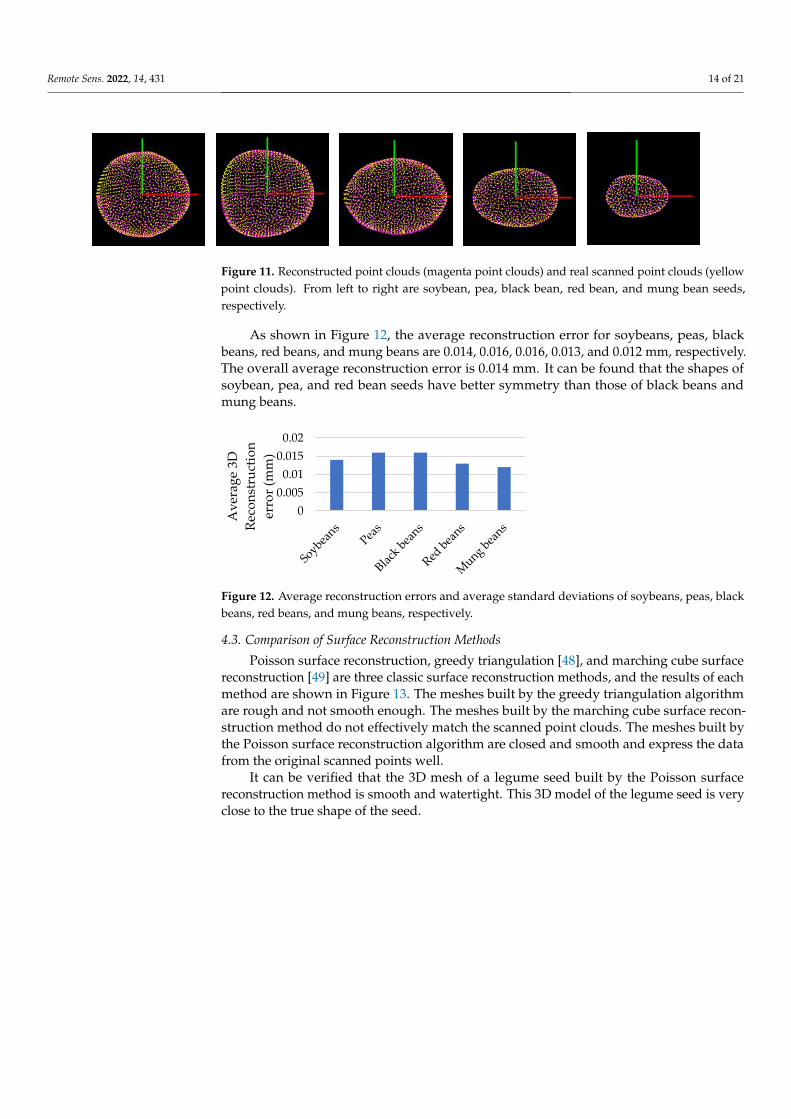
Figure 11. Reconstructed point clouds (magenta point clouds) and real scanned point clouds (yellow
point clouds). From left to right are soybean, pea, black bean, red bean, and mung bean seeds, re-
spectively.
As shown in Figure 12, the average reconstruction error for soybeans, peas, black
beans, red beans, and mung beans are 0.014, 0.016, 0.016, 0.013, and 0.012 mm, respec-
tively. The overall average reconstruction error is 0.014 mm. It can be found that the
shapes of soybean, pea, and red bean seeds have better symmetry than those of black
beans and mung beans.
Figure 12. Average reconstruction errors and average standard deviations of soybeans, peas, black
beans, red beans, and mung beans, respectively.
4.3. Comparison of Surface Reconstruction Methods
Poisson surface reconstruction, greedy triangulation [48], and marching cube surface
reconstruction [49] are three classic surface reconstruction methods, and the results of
each method are shown in Figure 13 (from top to bottom). The meshes built by the greedy
triangulation algorithm are rough and not smooth enough. The meshes built by the
marching cube surface reconstruction method do not effectively match the scanned point
clouds. The meshes built by the Poisson surface reconstruction algorithm are closed and
smooth and express the data from the original scanned points well.
It can be verified that the 3D mesh of a legume seed built by the Poisson surface
reconstruction method is smooth and watertight. This 3D model of the legume seed is
very close to the true shape of the seed.
0
0.005
0.01
0.015
0.02
Av
erag
e 3D
Rec
on
stru
ctio
n
erro
r (m
m)
Figure 11. Reconstructed point clouds (magenta point clouds) and real scanned point clouds (yellowpoint clouds). From left to right are soybean, pea, black bean, red bean, and mung bean seeds,respectively.
As shown in Figure 12, the average reconstruction error for soybeans, peas, blackbeans, red beans, and mung beans are 0.014, 0.016, 0.016, 0.013, and 0.012 mm, respectively.The overall average reconstruction error is 0.014 mm. It can be found that the shapes ofsoybean, pea, and red bean seeds have better symmetry than those of black beans andmung beans.
Remote Sens. 2022, 14, x FOR PEER REVIEW 14 of 22
4.2. Accuracy of 3D Reconstruction
The validity of the reconstructed 3D model directly affects the correctness of the trait
measurements. To compare the reconstructed model with real data, complete point clouds
were obtained using the RigelScan Elite. To do this, a single seed was skewered on a long
needle, which was then affixed to the table, and the seed was scanned in detail to get its
complete point cloud. It took approximately 90 s to obtain a detailed and complete point
cloud of a single seed. A total of 10 samples of each kind of legume seed were individually
scanned. The reconstructed point clouds (magenta point clouds) and the artificially
scanned point clouds (yellow point clouds) are presented in Figure 11. The reconstructed
point cloud has a high overlap with the real scanned point cloud. The deviation can hardly
be seen visually.
Figure 11. Reconstructed point clouds (magenta point clouds) and real scanned point clouds (yellow
point clouds). From left to right are soybean, pea, black bean, red bean, and mung bean seeds, re-
spectively.
As shown in Figure 12, the average reconstruction error for soybeans, peas, black
beans, red beans, and mung beans are 0.014, 0.016, 0.016, 0.013, and 0.012 mm, respec-
tively. The overall average reconstruction error is 0.014 mm. It can be found that the
shapes of soybean, pea, and red bean seeds have better symmetry than those of black
beans and mung beans.
Figure 12. Average reconstruction errors and average standard deviations of soybeans, peas, black
beans, red beans, and mung beans, respectively.
4.3. Comparison of Surface Reconstruction Methods
Poisson surface reconstruction, greedy triangulation [48], and marching cube surface
reconstruction [49] are three classic surface reconstruction methods, and the results of
each method are shown in Figure 13 (from top to bottom). The meshes built by the greedy
triangulation algorithm are rough and not smooth enough. The meshes built by the
marching cube surface reconstruction method do not effectively match the scanned point
clouds. The meshes built by the Poisson surface reconstruction algorithm are closed and
smooth and express the data from the original scanned points well.
It can be verified that the 3D mesh of a legume seed built by the Poisson surface
reconstruction method is smooth and watertight. This 3D model of the legume seed is
very close to the true shape of the seed.
0
0.005
0.01
0.015
0.02
Av
erag
e 3D
Rec
on
stru
ctio
n
erro
r (m
m)
Figure 12. Average reconstruction errors and average standard deviations of soybeans, peas, blackbeans, red beans, and mung beans, respectively.
4.3. Comparison of Surface Reconstruction Methods
Poisson surface reconstruction, greedy triangulation [48], and marching cube surfacereconstruction [49] are three classic surface reconstruction methods, and the results of eachmethod are shown in Figure 13. The meshes built by the greedy triangulation algorithmare rough and not smooth enough. The meshes built by the marching cube surface recon-struction method do not effectively match the scanned point clouds. The meshes built bythe Poisson surface reconstruction algorithm are closed and smooth and express the datafrom the original scanned points well.
It can be verified that the 3D mesh of a legume seed built by the Poisson surfacereconstruction method is smooth and watertight. This 3D model of the legume seed is veryclose to the true shape of the seed.

Remote Sens. 2022, 14, 431 15 of 21Remote Sens. 2022, 14, x FOR PEER REVIEW 15 of 22
Figure 13. Surface reconstruction results. Each column shows a type of seed, from left to right: soy-
beans, peas, black beans, red beans, and mung beans. The rows show the mesh built by Poisson
surface reconstruction, greedy triangulation, and marching cube surface reconstruction from top to
bottom.
4.4. Accuracy of Trait Estimation
From the scanned 2500 samples, 50 seeds (the same seeds as in Section 4.2) were
measured manually to evaluate the algorithm performance. The ground truths of length,
width, and thickness were obtained using a vernier caliper. The other traits were
measured by the software Geomagic Studio based on the real 3D point cloud obtained in
Section 4.2. All the ground truths were manually measured three times by three people,
and the average was adopted.
The measurement accuracies of 11 morphological traits, 11 scale factors, and 12 shape
factors are shown in Figure 14, Appendix A, and Appendix B. The values of MAE, RMSE,
MRE, and R2 of these kernel traits are presented in detail. The average absolute
measurement accuracy and root mean square error are in submillimeter, the average
relative measurement accuracy is within 3%, and R2 is above 0.9983 for the 11
morphological traits. The average relative measurement accuracy is within 4%, and R2 for
the 11 morphological traits is above 0.8343 for 11 scale factors and 12 shape factors. The
experiments show that the measurement accuracy of the proposed method is comparable
to previous work in this area [6,44,50]. Moreover, the proposed method shows the
viability and effectiveness of automatic estimation and batch extraction of seeds’
geometric parameters, especially their 3D traits.
Figure 13. Surface reconstruction results. Each column shows a type of seed, from left to right:soybeans, peas, black beans, red beans, and mung beans. The rows show the mesh built by Poissonsurface reconstruction, greedy triangulation, and marching cube surface reconstruction from top tobottom.
4.4. Accuracy of Trait Estimation
From the scanned 2500 samples, 50 seeds (the same seeds as in Section 4.2) weremeasured manually to evaluate the algorithm performance. The ground truths of length,width, and thickness were obtained using a vernier caliper. The other traits were measuredby the software Geomagic Studio based on the real 3D point cloud obtained in Section 4.2.All the ground truths were manually measured three times by three people, and the averagewas adopted.
The measurement accuracies of 11 morphological traits, 11 scale factors, and 12 shapefactors are shown in Figure 14, Appendix A, and Appendix B. The values of MAE, RMSE,MRE, and R2 of these kernel traits are presented in detail. The average absolute mea-surement accuracy and root mean square error are in submillimeter, the average relativemeasurement accuracy is within 3%, and R2 is above 0.9983 for the 11 morphological traits.The average relative measurement accuracy is within 4%, and R2 for the 11 morphologicaltraits is above 0.8343 for 11 scale factors and 12 shape factors. The experiments show thatthe measurement accuracy of the proposed method is comparable to previous work in thisarea [6,44,50]. Moreover, the proposed method shows the viability and effectiveness ofautomatic estimation and batch extraction of seeds’ geometric parameters, especially their3D traits.
Remote Sens. 2022, 14, 431 16 of 21Remote Sens. 2022, 14, x FOR PEER REVIEW 16 of 22
Figure 14. Measurement accuracies of 11 morphological traits.
4.5. Advantages, Limitations, Improvements, and Future Work
A high-throughput legume seed phenotyping method is proposed in this paper. The
handheld scanner RigelScan Elite can rapidly obtain point clouds of legume seeds in
batches with an accuracy of 0.01 mm. The 3D model of a single seed can be reconstructed
with an average reconstruction error of 0.014 mm. A total of 34 legume seed traits, notably
the longitudinal and transverse profiles traits, can be automatically extracted in batches.
The measurement accuracy is within 4% for all the morphological traits. The measurement
0
100
200
300
0 100 200 300Man
ual
mea
sure
men
t (m
m3 )
Automatic measurement (mm3)
V
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 2.82 mm3
RMSE = 3.68 mm3
MRE = 2.06%
R2 = 0.9986
0
50
100
150
200
250
0 50 100 150 200 250Man
ual
mea
sure
men
t (m
m2 )
Automatic measurement (mm2)
S
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 2.31 mm2
RMSE = 2.72 mm2
MRE = 2.09%
R2 = 0.9983
4
6
8
10
4 6 8 10Man
ual
mea
sure
men
t (m
m)
Automatic measurement (mm)
L
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.06 mm
RMSE = 0.07 mm
MRE = 0.84 %
R2 = 0.9986
3
5
7
9
3 5 7 9Man
ual
mea
sure
men
t (m
m)
Automatic measurement (mm)
W
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.05 mm
RMSE = 0.06 mm
MRE = 0.86%
R2 = 0.9991
2
3
4
5
6
7
8
2 3 4 5 6 7 8Man
ual
mea
sure
men
t (m
m)
Automatic measurement (mm)
H
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.05 mm
RMSE = 0.06 mm
MRE = 0.88%
R2 = 0.9991
10
15
20
25
30
10 15 20 25 30Man
ual
mea
sure
men
t (m
m)
Automatic measurement (mm)
C1
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.17 mm
RMSE = 0.18 mm
MRE = 0.80%
R2 = 0.9990
10
15
20
25
30
10 15 20 25 30Man
ual
mea
sure
men
t (m
m)
Automatic measurement (mm)
C2
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.16 mm
RMSE = 0.18 mm
MRE = 0.81%
R2 = 0.9988
10
15
20
25
10 15 20 25Man
ual
mea
sure
men
t (m
m)
Automatic measurement (mm)
C3
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.15 mm
RMSE = 0.17 mm
MRE = 0.83%
R2 = 0.9991
10
20
30
40
50
60
10 20 30 40 50 60Man
ual
mea
sure
men
t (m
m2 )
Automatic measurement (mm2)
A1
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.20 mm2
RMSE = 0.24 mm2
MRE = 0.60%
R2 = 0.9998
10
20
30
40
50
10 20 30 40 50Man
ual
mea
sure
men
t (m
m2 )
Automatic measurement (mm2)
A2
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.19 mm2
RMSE = 0.23 mm2
MRE = 0.62%
R2 = 0.9998
5
15
25
35
45
55
5 15 25 35 45 55Man
ual
mea
sure
men
t (m
m2 )
Automatic measurement (mm2)
A3
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.30 mm2
RMSE = 0.49 mm2
MRE = 1.81%
R2 = 0.9993
Figure 14. Measurement accuracies of 11 morphological traits.
4.5. Advantages, Limitations, Improvements, and Future Work
A high-throughput legume seed phenotyping method is proposed in this paper. Thehandheld scanner RigelScan Elite can rapidly obtain point clouds of legume seeds inbatches with an accuracy of 0.01 mm. The 3D model of a single seed can be reconstructedwith an average reconstruction error of 0.014 mm. A total of 34 legume seed traits, notablythe longitudinal and transverse profiles traits, can be automatically extracted in batches.The measurement accuracy is within 4% for all the morphological traits. The measurementtakes an average time per seed of 0.52 s. The results demonstrate the ability of the proposed
Remote Sens. 2022, 14, 431 17 of 21
method to perform data batch processing and automatic measurement, which showspotential for real-time measurement and high-throughput phenotyping.
The extracted 34 trait indicators in this paper have prospects and research value inapplication in precision agriculture. The morphological traits, such as the volume, surfacearea, length, width, thickness, horizontal profile perimeter, transverse profile perimeter,longitudinal profile perimeter, horizontal profile cross-section area, transverse profile cross-section area, and longitudinal profile cross-section area, can directly quantitatively describethe seed size, which is important in quality evaluation, optimization breeding, and yieldevaluation. The scale traits and shape factors can quantitatively describe the seed shape,which can be helpful in species identification and classification and quantitative trait loci.
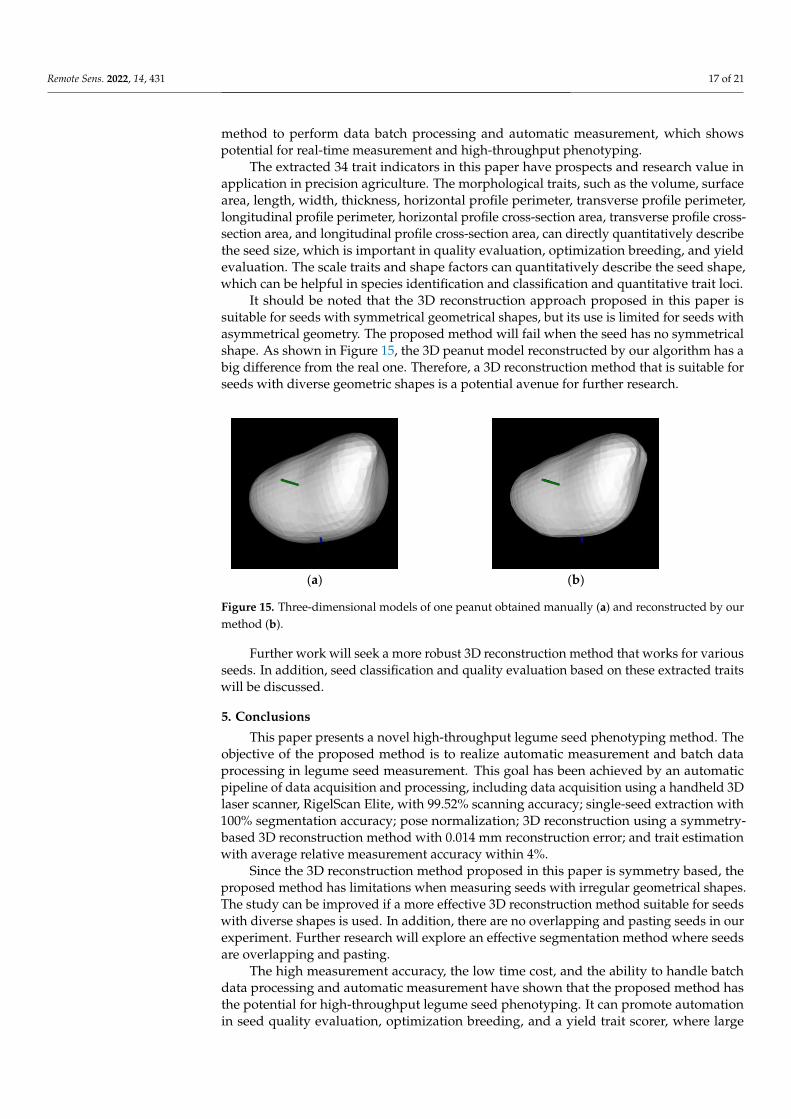
It should be noted that the 3D reconstruction approach proposed in this paper issuitable for seeds with symmetrical geometrical shapes, but its use is limited for seeds withasymmetrical geometry. The proposed method will fail when the seed has no symmetricalshape. As shown in Figure 15, the 3D peanut model reconstructed by our algorithm has abig difference from the real one. Therefore, a 3D reconstruction method that is suitable forseeds with diverse geometric shapes is a potential avenue for further research.
Remote Sens. 2022, 14, x FOR PEER REVIEW 17 of 22
takes an average time per seed of 0.52 s. The results demonstrate the ability of the pro-
posed method to perform data batch processing and automatic measurement, which
shows potential for real-time measurement and high-throughput phenotyping.
The extracted 34 trait indicators in this paper have prospects and research value in
application in precision agriculture. The morphological traits, such as the volume, surface
area, length, width, thickness, horizontal profile perimeter, transverse profile perimeter,
longitudinal profile perimeter, horizontal profile cross-section area, transverse profile
cross-section area, and longitudinal profile cross-section area, can directly quantitatively
describe the seed size, which is important in quality evaluation, optimization breeding,
and yield evaluation. The scale traits and shape factors can quantitatively describe the
seed shape, which can be helpful in species identification and classification and quantita-
tive trait loci.
It should be noted that the 3D reconstruction approach proposed in this paper is suit-
able for seeds with symmetrical geometrical shapes, but its use is limited for seeds with
asymmetrical geometry. The proposed method will fail when the seed has no symmetrical
shape. As shown in Figure 15, the 3D peanut model reconstructed by our algorithm has a
big difference from the real one. Therefore, a 3D reconstruction method that is suitable for
seeds with diverse geometric shapes is a potential avenue for further research.
Further work will seek a more robust 3D reconstruction method that works for vari-
ous seeds. In addition, seed classification and quality evaluation based on these extracted
traits will be discussed.
(a) (b)
Figure 15. Three-dimensional models of one peanut obtained manually (a) and reconstructed by
our method (b).
5. Conclusions
This paper presents a novel high-throughput legume seed phenotyping method. The
objective of the proposed method is to realize automatic measurement and batch data
processing in legume seed measurement. This goal has been achieved by an automatic
pipeline of data acquisition and processing, including data acquisition using a handheld
3D laser scanner, RigelScan Elite, with 99.52% scanning accuracy; single-seed extraction
with 100% segmentation accuracy; pose normalization; 3D reconstruction using a sym-
metry-based 3D reconstruction method with 0.014 mm reconstruction error; and trait es-
timation with average relative measurement accuracy within 4%.
Since the 3D reconstruction method proposed in this paper is symmetry based, the
proposed method has limitations when measuring seeds with irregular geometrical
shapes. The study can be improved if a more effective 3D reconstruction method suitable
for seeds with diverse shapes is used. In addition, there are no overlapping and pasting
seeds in our experiment. Further research will explore an effective segmentation method
where seeds are overlapping and pasting.
The high measurement accuracy, the low time cost, and the ability to handle batch
data processing and automatic measurement have shown that the proposed method has
the potential for high-throughput legume seed phenotyping. It can promote automation
Figure 15. Three-dimensional models of one peanut obtained manually (a) and reconstructed by ourmethod (b).
Further work will seek a more robust 3D reconstruction method that works for variousseeds. In addition, seed classification and quality evaluation based on these extracted traitswill be discussed.
5. Conclusions
This paper presents a novel high-throughput legume seed phenotyping method. Theobjective of the proposed method is to realize automatic measurement and batch dataprocessing in legume seed measurement. This goal has been achieved by an automaticpipeline of data acquisition and processing, including data acquisition using a handheld 3Dlaser scanner, RigelScan Elite, with 99.52% scanning accuracy; single-seed extraction with100% segmentation accuracy; pose normalization; 3D reconstruction using a symmetry-based 3D reconstruction method with 0.014 mm reconstruction error; and trait estimationwith average relative measurement accuracy within 4%.
Since the 3D reconstruction method proposed in this paper is symmetry based, theproposed method has limitations when measuring seeds with irregular geometrical shapes.The study can be improved if a more effective 3D reconstruction method suitable for seedswith diverse shapes is used. In addition, there are no overlapping and pasting seeds in ourexperiment. Further research will explore an effective segmentation method where seedsare overlapping and pasting.
The high measurement accuracy, the low time cost, and the ability to handle batchdata processing and automatic measurement have shown that the proposed method hasthe potential for high-throughput legume seed phenotyping. It can promote automationin seed quality evaluation, optimization breeding, and a yield trait scorer, where large
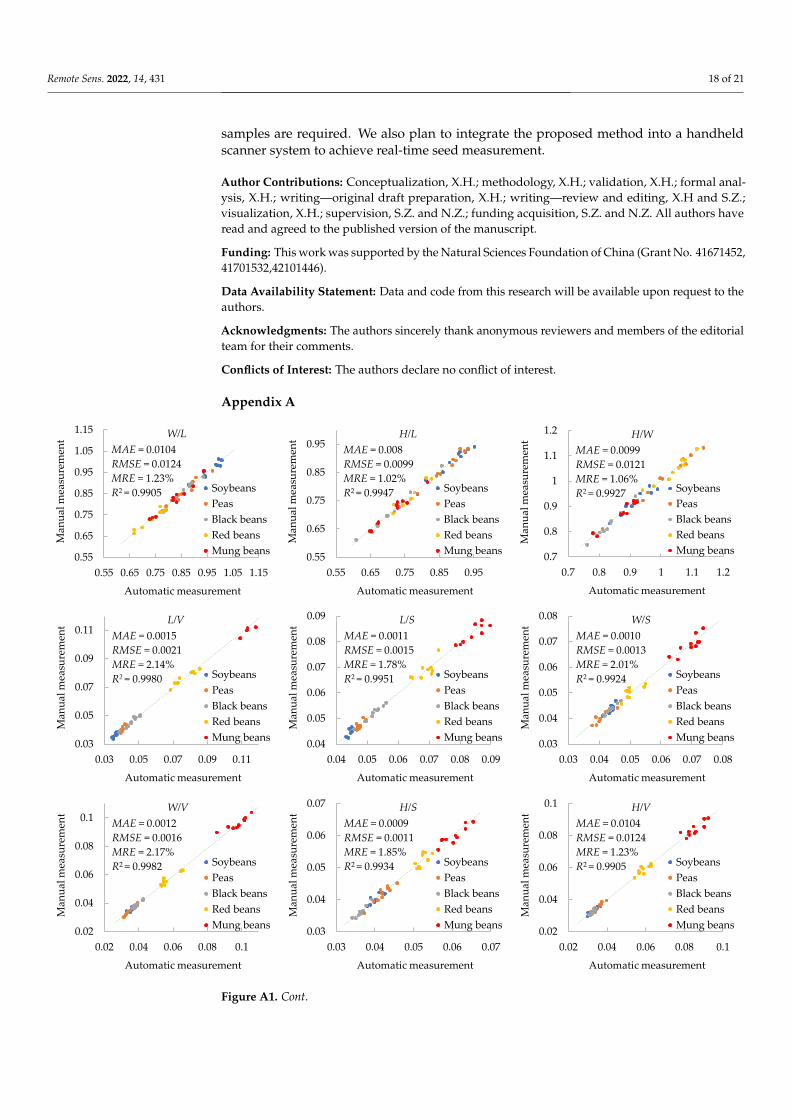
Remote Sens. 2022, 14, 431 18 of 21
samples are required. We also plan to integrate the proposed method into a handheldscanner system to achieve real-time seed measurement.
Author Contributions: Conceptualization, X.H.; methodology, X.H.; validation, X.H.; formal anal-ysis, X.H.; writing—original draft preparation, X.H.; writing—review and editing, X.H and S.Z.;visualization, X.H.; supervision, S.Z. and N.Z.; funding acquisition, S.Z. and N.Z. All authors haveread and agreed to the published version of the manuscript.
Funding: This work was supported by the Natural Sciences Foundation of China (Grant No. 41671452,41701532,42101446).
Data Availability Statement: Data and code from this research will be available upon request to theauthors.
Acknowledgments: The authors sincerely thank anonymous reviewers and members of the editorialteam for their comments.
Conflicts of Interest: The authors declare no conflict of interest.
Appendix A
Remote Sens. 2022, 14, x FOR PEER REVIEW 18 of 22
in seed quality evaluation, optimization breeding, and a yield trait scorer, where large
samples are required. We also plan to integrate the proposed method into a handheld
scanner system to achieve real-time seed measurement.
Author Contributions: Conceptualization, X.H.; methodology, X.H.; validation, X.H.; formal anal-
ysis, X.H.; writing—original draft preparation, X.H.; writing—review and editing, X.H and S.Z.;
visualization, X.H.; supervision, S.Z. and N.Z.; funding acquisition, S.Z. and N.Z. All authors have
read and agreed to the published version of the manuscript.
Funding: This work was supported by the Natural Sciences Foundation of China (Grant No.
41671452, 41701532,42101446).
Data Availability Statement: Data and code from this research will be available upon request to the
authors.
Acknowledgments: The authors sincerely thank anonymous reviewers and members of the edito-
rial team for their comments.
Conflicts of Interest: The authors declare no conflicts of interest.
Appendix A
0.55
0.65
0.75
0.85
0.95
1.05
1.15
0.55 0.65 0.75 0.85 0.95 1.05 1.15
Man
ual
mea
sure
men
t
Automatic measurement
W/L
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0104
RMSE = 0.0124
MRE = 1.23%
R2 = 0.9905
0.55
0.65
0.75
0.85
0.95
0.55 0.65 0.75 0.85 0.95
Man
ual
mea
sure
men
t
Automatic measurement
H/L
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.008
RMSE = 0.0099
MRE = 1.02%
R2 = 0.9947
0.7
0.8
0.9
1
1.1
1.2
0.7 0.8 0.9 1 1.1 1.2
Man
ual
mea
sure
men
t
Automatic measurement
H/W
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0099
RMSE = 0.0121
MRE = 1.06%
R2 = 0.9927
0.03
0.05
0.07
0.09
0.11
0.03 0.05 0.07 0.09 0.11
Man
ual
mea
sure
men
t
Automatic measurement
L/V
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0015
RMSE = 0.0021
MRE = 2.14%
R2 = 0.9980
0.04
0.05
0.06
0.07
0.08
0.09
0.04 0.05 0.06 0.07 0.08 0.09
Man
ual
mea
sure
men
t
Automatic measurement
L/S
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0011
RMSE = 0.0015
MRE = 1.78%
R2 = 0.9951
0.03
0.04
0.05
0.06
0.07
0.08
0.03 0.04 0.05 0.06 0.07 0.08
Man
ual
mea
sure
men
t
Automatic measurement
W/S
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0010
RMSE = 0.0013
MRE = 2.01%
R2 = 0.9924
0.02
0.04
0.06
0.08
0.1
0.02 0.04 0.06 0.08 0.1
Man
ual
mea
sure
men
t
Automatic measurement
W/V
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0012
RMSE = 0.0016
MRE = 2.17%
R2 = 0.9982
0.03
0.04
0.05
0.06
0.07
0.03 0.04 0.05 0.06 0.07
Man
ual
mea
sure
men
t
Automatic measurement
H/S
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0009
RMSE = 0.0011
MRE = 1.85%
R2 = 0.9934
0.02
0.04
0.06
0.08
0.1
0.02 0.04 0.06 0.08 0.1
Man
ual
mea
sure
men
t
Automatic measurement
H/V
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0104
RMSE = 0.0124
MRE = 1.23%
R2 = 0.9905
Figure A1. Cont.
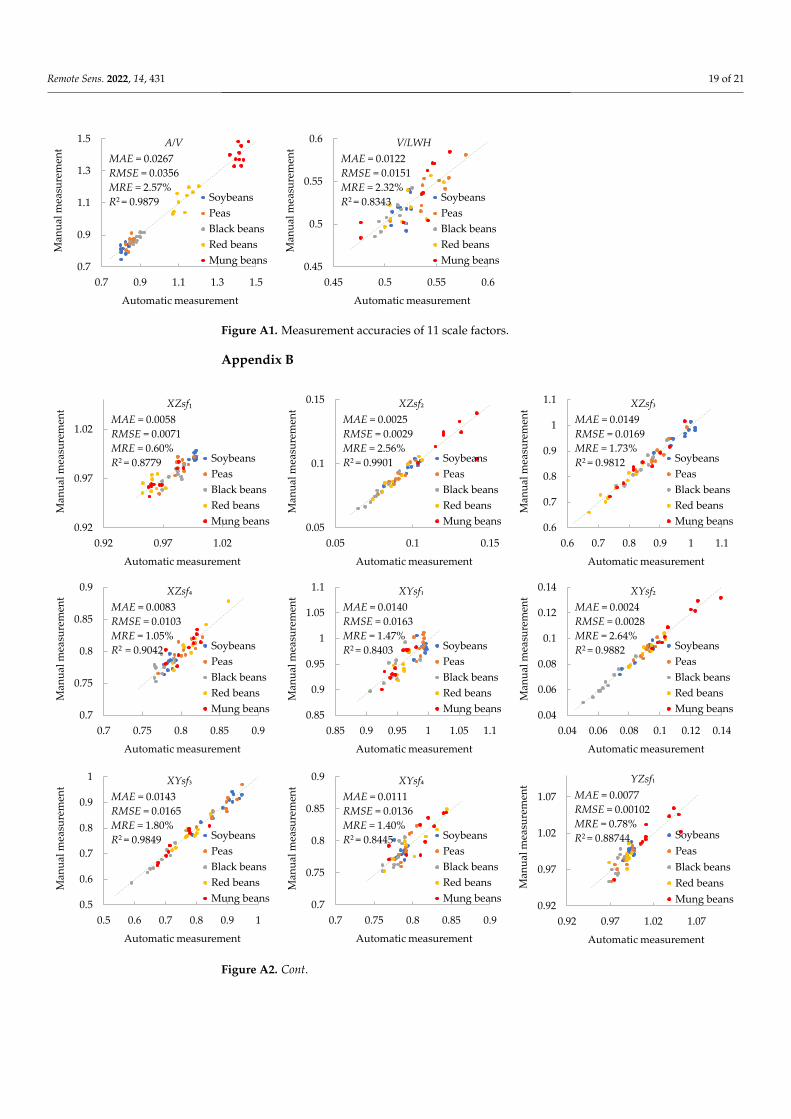
Remote Sens. 2022, 14, 431 19 of 21Remote Sens. 2022, 14, x FOR PEER REVIEW 19 of 22
Figure A1. Measurement Accuracies of 11 Scale Factors.
Appendix B
0.7
0.9
1.1
1.3
1.5
0.7 0.9 1.1 1.3 1.5
Man
ual
mea
sure
men
t
Automatic measurement
A/V
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0267
RMSE = 0.0356
MRE = 2.57%
R2 = 0.9879
0.45
0.5
0.55
0.6
0.45 0.5 0.55 0.6M
anu
al m
easu
rem
ent
Automatic measurement
V/LWH
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0122
RMSE = 0.0151
MRE = 2.32%
R2 = 0.8343
0.92
0.97
1.02
0.92 0.97 1.02
Man
ual
mea
sure
men
t
Automatic measurement
XZsf₁
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0058
RMSE = 0.0071
MRE = 0.60%
R2 = 0.8779
0.05
0.1
0.15
0.05 0.1 0.15
Man
ual
mea
sure
men
t
Automatic measurement
XZsf₂
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0025
RMSE = 0.0029
MRE = 2.56%
R2 = 0.9901
0.6
0.7
0.8
0.9
1
1.1
0.6 0.7 0.8 0.9 1 1.1
Man
ual
mea
sure
men
t
Automatic measurement
XZsf₃
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0149
RMSE = 0.0169
MRE = 1.73%
R2 = 0.9812
0.7
0.75
0.8
0.85
0.9
0.7 0.75 0.8 0.85 0.9
Man
ual
mea
sure
men
t
Automatic measurement
XZsf₄
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0083
RMSE = 0.0103
MRE = 1.05%
R2 = 0.9042
0.85
0.9
0.95
1
1.05
1.1
0.85 0.9 0.95 1 1.05 1.1
Man
ual
mea
sure
men
t
Automatic measurement
XYsf₁
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0140
RMSE = 0.0163
MRE = 1.47%
R2 = 0.8403
0.04
0.06
0.08
0.1
0.12
0.14
0.04 0.06 0.08 0.1 0.12 0.14
Man
ual
mea
sure
men
t
Automatic measurement
XYsf₂
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0024
RMSE = 0.0028
MRE = 2.64%
R2 = 0.9882
0.5
0.6
0.7
0.8
0.9
1
0.5 0.6 0.7 0.8 0.9 1
Man
ual
mea
sure
men
t
Automatic measurement
XYsf₃
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0143
RMSE = 0.0165
MRE = 1.80%
R2 = 0.9849
0.7
0.75
0.8
0.85
0.9
0.7 0.75 0.8 0.85 0.9
Man
ual
mea
sure
men
t
Automatic measurement
XYsf₄
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0111
RMSE = 0.0136
MRE = 1.40%
R2 = 0.8445
0.92
0.97
1.02
1.07
0.92 0.97 1.02 1.07
Man
ual
mea
sure
men
t
Automatic measurement
YZsf₁
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0077
RMSE = 0.00102
MRE = 0.78%
R2 = 0.88744
Figure A1. Measurement accuracies of 11 scale factors.
Appendix B
Remote Sens. 2022, 14, x FOR PEER REVIEW 19 of 22
Figure A1. Measurement Accuracies of 11 Scale Factors.
Appendix B
0.7
0.9
1.1
1.3
1.5
0.7 0.9 1.1 1.3 1.5
Man
ual
mea
sure
men
t
Automatic measurement
A/V
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0267
RMSE = 0.0356
MRE = 2.57%
R2 = 0.9879
0.45
0.5
0.55
0.6
0.45 0.5 0.55 0.6M
anu
al m
easu
rem
ent
Automatic measurement
V/LWH
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0122
RMSE = 0.0151
MRE = 2.32%
R2 = 0.8343
0.92
0.97
1.02
0.92 0.97 1.02
Man
ual
mea
sure
men
t
Automatic measurement
XZsf₁
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0058
RMSE = 0.0071
MRE = 0.60%
R2 = 0.8779
0.05
0.1
0.15
0.05 0.1 0.15
Man
ual
mea
sure
men
t
Automatic measurement
XZsf₂
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0025
RMSE = 0.0029
MRE = 2.56%
R2 = 0.9901
0.6
0.7
0.8
0.9
1
1.1
0.6 0.7 0.8 0.9 1 1.1
Man
ual
mea
sure
men
t
Automatic measurement
XZsf₃
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0149
RMSE = 0.0169
MRE = 1.73%
R2 = 0.9812
0.7
0.75
0.8
0.85
0.9
0.7 0.75 0.8 0.85 0.9
Man
ual
mea
sure
men
t
Automatic measurement
XZsf₄
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0083
RMSE = 0.0103
MRE = 1.05%
R2 = 0.9042
0.85
0.9
0.95
1
1.05
1.1
0.85 0.9 0.95 1 1.05 1.1
Man
ual
mea
sure
men
t
Automatic measurement
XYsf₁
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0140
RMSE = 0.0163
MRE = 1.47%
R2 = 0.8403
0.04
0.06
0.08
0.1
0.12
0.14
0.04 0.06 0.08 0.1 0.12 0.14
Man
ual
mea
sure
men
t
Automatic measurement
XYsf₂
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0024
RMSE = 0.0028
MRE = 2.64%
R2 = 0.9882
0.5
0.6
0.7
0.8
0.9
1
0.5 0.6 0.7 0.8 0.9 1
Man
ual
mea
sure
men
t
Automatic measurement
XYsf₃
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0143
RMSE = 0.0165
MRE = 1.80%
R2 = 0.9849
0.7
0.75
0.8
0.85
0.9
0.7 0.75 0.8 0.85 0.9
Man
ual
mea
sure
men
t
Automatic measurement
XYsf₄
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0111
RMSE = 0.0136
MRE = 1.40%
R2 = 0.8445
0.92
0.97
1.02
1.07
0.92 0.97 1.02 1.07
Man
ual
mea
sure
men
t
Automatic measurement
YZsf₁
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0077
RMSE = 0.00102
MRE = 0.78%
R2 = 0.88744
Figure A2. Cont.
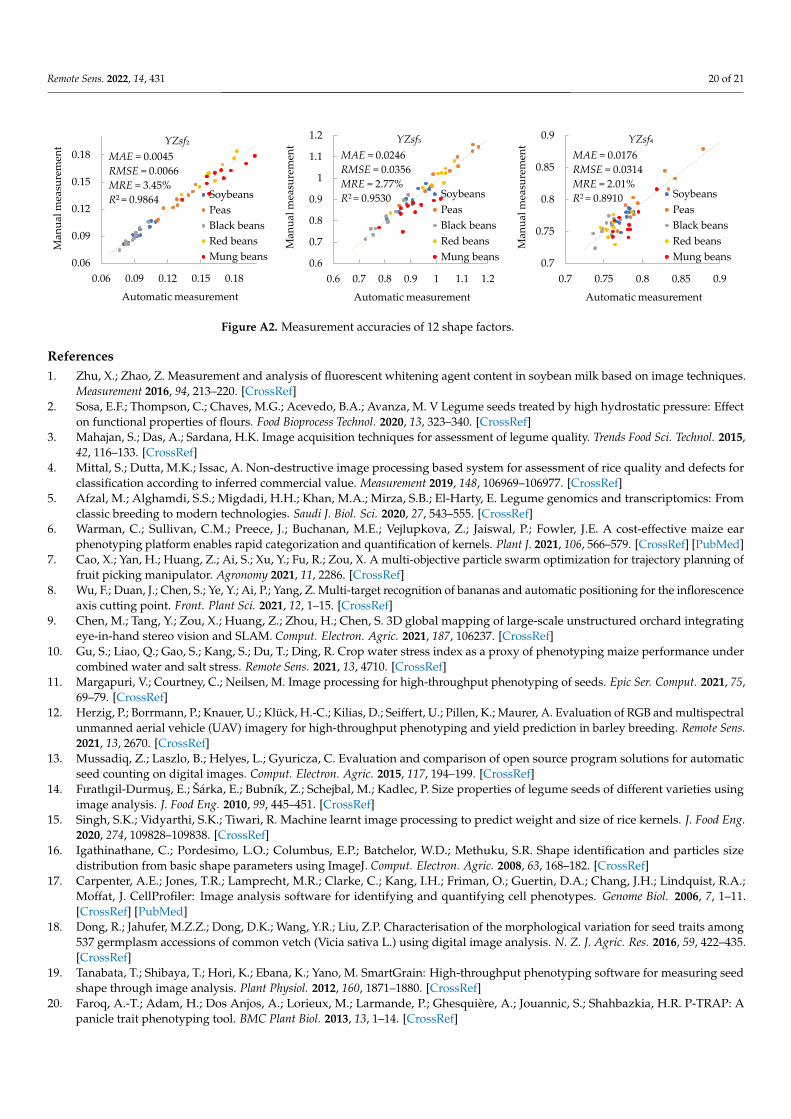
Remote Sens. 2022, 14, 431 20 of 21Remote Sens. 2022, 14, x FOR PEER REVIEW 20 of 22
Figure A2. Measurement Accuracies of 12 Shape Factors.
References
1. Zhu, X.; Zhao, Z. Measurement and analysis of fluorescent whitening agent content in soybean milk based on image techniques.
Measurement 2016, 94, 213–220. https://doi.org/10.1016/j.measurement.2016.07.068.
2. Sosa, E.F.; Thompson, C.; Chaves, M.G.; Acevedo, B.A.; Avanza, M. V Legume seeds treated by high hydrostatic pressure: Effect
on functional properties of flours. Food Bioprocess Technol. 2020, 13, 323–340. https://doi.org/10.1007/s11947-019-02386-9.
3. Mahajan, S.; Das, A.; Sardana, H.K. Image acquisition techniques for assessment of legume quality. Trends Food Sci. Technol.
2015, 42, 116–133. https://doi.org/10.1016/j.tifs.2015.01.001.
4. Mittal, S.; Dutta, M.K.; Issac, A. Non-destructive image processing based system for assessment of rice quality and defects for
classification according to inferred commercial value. Measurement 2019, 148, 106969–106977.
https://doi.org/10.1016/j.measurement.2019.106969.
5. Afzal, M.; Alghamdi, S.S.; Migdadi, H.H.; Khan, M.A.; Mirza, S.B.; El-Harty, E. Legume genomics and transcriptomics: From
classic breeding to modern technologies. Saudi J. Biol. Sci. 2020, 27, 543–555. https://doi.org/10.1016/j.sjbs.2019.11.018.
6. Warman, C.; Sullivan, C.M.; Preece, J.; Buchanan, M.E.; Vejlupkova, Z.; Jaiswal, P.; Fowler, J.E. A cost-effective maize ear
phenotyping platform enables rapid categorization and quantification of kernels. Plant J. 2021, 106, 566–579.
https://doi.org/10.1101/2020.07.12.199000.
7. Cao, X.; Yan, H.; Huang, Z.; Ai, S.; Xu, Y.; Fu, R.; Zou, X. A multi-objective particle swarm optimization for trajectory planning
of fruit picking manipulator. Agronomy 2021, 11, 2286. https://doi.org/10.3390/agronomy11112286.
8. Wu, F.; Duan, J.; Chen, S.; Ye, Y.; Ai, P.; Yang, Z. Multi-target recognition of bananas and automatic positioning for the
inflorescence axis cutting point. Front. Plant Sci. 2021, 12, 1-15. https://doi.org/10.3389/fpls.2021.705021.
9. Chen, M.; Tang, Y.; Zou, X.; Huang, Z.; Zhou, H.; Chen, S. 3D global mapping of large-scale unstructured orchard integrating
eye-in-hand stereo vision and SLAM. Comput. Electron. Agric. 2021, 187, 106237. https://doi.org/10.1016/j.compag.2021.106237.
10. Gu, S.; Liao, Q.; Gao, S.; Kang, S.; Du, T.; Ding, R. Crop water stress index as a proxy of phenotyping maize performance under
combined water and salt stress. Remote Sens. 2021, 13, 4710. https://doi.org/10.3390/rs13224710.
11. Margapuri, V.; Courtney, C.; Neilsen, M. Image processing for high-throughput phenotyping of seeds. Epic Ser. Comput. 2021,
75, 69–79. https://doi.org/10.29007/x4p4.
12. Herzig, P.; Borrmann, P.; Knauer, U.; Klück, H.-C.; Kilias, D.; Seiffert, U.; Pillen, K.; Maurer, A. Evaluation of RGB and
multispectral unmanned aerial vehicle (UAV) imagery for high-throughput phenotyping and yield prediction in barley
breeding. Remote Sens. 2021, 13, 2670. https://doi.org/10.3390/rs13142670.
13. Mussadiq, Z.; Laszlo, B.; Helyes, L.; Gyuricza, C. Evaluation and comparison of open source program solutions for automatic
seed counting on digital images. Comput. Electron. Agric. 2015, 117, 194–199. https://doi.org/10.1016/j.compag.2015.08.010.
14. Fıratlıgil-Durmuş, E.; Šárka, E.; Bubník, Z.; Schejbal, M.; Kadlec, P. Size properties of legume seeds of different varieties using
image analysis. J. Food Eng. 2010, 99, 445–451. https://doi.org/10.1016/j.jfoodeng.2009.08.005.
15. Singh, S.K.; Vidyarthi, S.K.; Tiwari, R. Machine learnt image processing to predict weight and size of rice kernels. J. Food Eng.
2020, 274, 109828–109838. https://doi.org/10.1101/743427.
16. Igathinathane, C.; Pordesimo, L.O.; Columbus, E.P.; Batchelor, W.D.; Methuku, S.R. Shape identification and particles size
distribution from basic shape parameters using ImageJ. Comput. Electron. Agric. 2008, 63, 168–182.
https://doi.org/10.1016/j.compag.2008.02.007.
17. Carpenter, A.E.; Jones, T.R.; Lamprecht, M.R.; Clarke, C.; Kang, I.H.; Friman, O.; Guertin, D.A.; Chang, J.H.; Lindquist, R.A.;
Moffat, J. CellProfiler: Image analysis software for identifying and quantifying cell phenotypes. Genome Biol. 2006, 7, 1–11.
https://doi.org/10.1186/gb-2006-7-10-r100.
18. Dong, R.; Jahufer, M.Z.Z.; Dong, D.K.; Wang, Y.R.; Liu, Z.P. Characterisation of the morphological variation for seed traits
among 537 germplasm accessions of common vetch (Vicia sativa L.) using digital image analysis. N. Z. J. Agric. Res. 2016, 59,
422–435. https://doi.org/10.1080/00288233.2016.1229682.
19. Tanabata, T.; Shibaya, T.; Hori, K.; Ebana, K.; Yano, M. SmartGrain: High-throughput phenotyping software for measuring seed
shape through image analysis. Plant Physiol. 2012, 160, 1871–1880. https://doi.org/10.2307/41812032.
0.06
0.09
0.12
0.15
0.18
0.06 0.09 0.12 0.15 0.18
Man
ual
mea
sure
men
t
Automatic measurement
YZsf₂
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0045
RMSE = 0.0066
MRE = 3.45%
R2 = 0.9864
0.6
0.7
0.8
0.9
1
1.1
1.2
0.6 0.7 0.8 0.9 1 1.1 1.2M
anu
al m
easu
rem
ent
Automatic measurement
YZsf₃
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0246
RMSE = 0.0356
MRE = 2.77%
R2 = 0.9530
0.7
0.75
0.8
0.85
0.9
0.7 0.75 0.8 0.85 0.9
Man
ual
mea
sure
men
t
Automatic measurement
YZsf₄
Soybeans
Peas
Black beans
Red beans
Mung beans
MAE = 0.0176
RMSE = 0.0314
MRE = 2.01%
R2 = 0.8910
Figure A2. Measurement accuracies of 12 shape factors.
References1. Zhu, X.; Zhao, Z. Measurement and analysis of fluorescent whitening agent content in soybean milk based on image techniques.
Measurement 2016, 94, 213–220. [CrossRef]2. Sosa, E.F.; Thompson, C.; Chaves, M.G.; Acevedo, B.A.; Avanza, M. V Legume seeds treated by high hydrostatic pressure: Effect
on functional properties of flours. Food Bioprocess Technol. 2020, 13, 323–340. [CrossRef]3. Mahajan, S.; Das, A.; Sardana, H.K. Image acquisition techniques for assessment of legume quality. Trends Food Sci. Technol. 2015,
42, 116–133. [CrossRef]4. Mittal, S.; Dutta, M.K.; Issac, A. Non-destructive image processing based system for assessment of rice quality and defects for
classification according to inferred commercial value. Measurement 2019, 148, 106969–106977. [CrossRef]5. Afzal, M.; Alghamdi, S.S.; Migdadi, H.H.; Khan, M.A.; Mirza, S.B.; El-Harty, E. Legume genomics and transcriptomics: From
classic breeding to modern technologies. Saudi J. Biol. Sci. 2020, 27, 543–555. [CrossRef]6. Warman, C.; Sullivan, C.M.; Preece, J.; Buchanan, M.E.; Vejlupkova, Z.; Jaiswal, P.; Fowler, J.E. A cost-effective maize ear
phenotyping platform enables rapid categorization and quantification of kernels. Plant J. 2021, 106, 566–579. [CrossRef] [PubMed]7. Cao, X.; Yan, H.; Huang, Z.; Ai, S.; Xu, Y.; Fu, R.; Zou, X. A multi-objective particle swarm optimization for trajectory planning of
fruit picking manipulator. Agronomy 2021, 11, 2286. [CrossRef]8. Wu, F.; Duan, J.; Chen, S.; Ye, Y.; Ai, P.; Yang, Z. Multi-target recognition of bananas and automatic positioning for the inflorescence
axis cutting point. Front. Plant Sci. 2021, 12, 1–15. [CrossRef]9. Chen, M.; Tang, Y.; Zou, X.; Huang, Z.; Zhou, H.; Chen, S. 3D global mapping of large-scale unstructured orchard integrating
eye-in-hand stereo vision and SLAM. Comput. Electron. Agric. 2021, 187, 106237. [CrossRef]10. Gu, S.; Liao, Q.; Gao, S.; Kang, S.; Du, T.; Ding, R. Crop water stress index as a proxy of phenotyping maize performance under
combined water and salt stress. Remote Sens. 2021, 13, 4710. [CrossRef]11. Margapuri, V.; Courtney, C.; Neilsen, M. Image processing for high-throughput phenotyping of seeds. Epic Ser. Comput. 2021, 75,
69–79. [CrossRef]12. Herzig, P.; Borrmann, P.; Knauer, U.; Klück, H.-C.; Kilias, D.; Seiffert, U.; Pillen, K.; Maurer, A. Evaluation of RGB and multispectral
unmanned aerial vehicle (UAV) imagery for high-throughput phenotyping and yield prediction in barley breeding. Remote Sens.2021, 13, 2670. [CrossRef]
13. Mussadiq, Z.; Laszlo, B.; Helyes, L.; Gyuricza, C. Evaluation and comparison of open source program solutions for automaticseed counting on digital images. Comput. Electron. Agric. 2015, 117, 194–199. [CrossRef]
14. Fıratlıgil-Durmus, E.; Šárka, E.; Bubník, Z.; Schejbal, M.; Kadlec, P. Size properties of legume seeds of different varieties usingimage analysis. J. Food Eng. 2010, 99, 445–451. [CrossRef]
15. Singh, S.K.; Vidyarthi, S.K.; Tiwari, R. Machine learnt image processing to predict weight and size of rice kernels. J. Food Eng.2020, 274, 109828–109838. [CrossRef]
16. Igathinathane, C.; Pordesimo, L.O.; Columbus, E.P.; Batchelor, W.D.; Methuku, S.R. Shape identification and particles sizedistribution from basic shape parameters using ImageJ. Comput. Electron. Agric. 2008, 63, 168–182. [CrossRef]
17. Carpenter, A.E.; Jones, T.R.; Lamprecht, M.R.; Clarke, C.; Kang, I.H.; Friman, O.; Guertin, D.A.; Chang, J.H.; Lindquist, R.A.;Moffat, J. CellProfiler: Image analysis software for identifying and quantifying cell phenotypes. Genome Biol. 2006, 7, 1–11.[CrossRef] [PubMed]
18. Dong, R.; Jahufer, M.Z.Z.; Dong, D.K.; Wang, Y.R.; Liu, Z.P. Characterisation of the morphological variation for seed traits among537 germplasm accessions of common vetch (Vicia sativa L.) using digital image analysis. N. Z. J. Agric. Res. 2016, 59, 422–435.[CrossRef]
19. Tanabata, T.; Shibaya, T.; Hori, K.; Ebana, K.; Yano, M. SmartGrain: High-throughput phenotyping software for measuring seedshape through image analysis. Plant Physiol. 2012, 160, 1871–1880. [CrossRef]
20. Faroq, A.-T.; Adam, H.; Dos Anjos, A.; Lorieux, M.; Larmande, P.; Ghesquière, A.; Jouannic, S.; Shahbazkia, H.R. P-TRAP: Apanicle trait phenotyping tool. BMC Plant Biol. 2013, 13, 1–14. [CrossRef]
Remote Sens. 2022, 14, 431 21 of 21
21. Chen, M.; Tang, Y.; Zou, X.; Huang, K.; Huang, Z.; Zhou, H.; Wang, C.; Lian, G. Three-dimensional perception of orchard bananacentral stock enhanced by adaptive multi-vision technology. Comput. Electron. Agric. 2020, 174, 105508. [CrossRef]
22. Lin, G.; Tang, Y.; Zou, X.; Xiong, J.; Fang, Y. Color-, depth- and shape-based 3D fruit detection. Precis. Agric. 2020, 21, 1–17.[CrossRef]
23. Yang, S.; Zheng, L.; Gao, W.; Wang, B.; Hao, X.; Mi, J.; Wang, M. An efficient processing approach for colored point cloud-basedhigh-throughput seedling phenotyping. Remote Sens. 2020, 12, 1540. [CrossRef]
24. Miao, T.; Zhu, C.; Xu, T.; Yang, T.; Li, N.; Zhou, Y.; Deng, H. Automatic stem-leaf segmentation of maize shoots using three-dimensional point cloud. Comput. Electron. Agric. 2021, 187, 106310. [CrossRef]
25. Zhang, Z.; Ma, X.; Guan, H.; Zhu, K.; Feng, J.; Yu, S. A method for calculating the leaf inclination of soybean canopy based on 3Dpoint clouds. Int. J. Remote Sens. 2021, 42, 5721–5742. [CrossRef]
26. De Souza, C.H.W.; Lamparelli, R.A.C.; Rocha, J.V.; Magalhães, P.S.G. Height estimation of sugarcane using an unmanned aerialsystem (UAS) based on structure from motion (SfM) point clouds. Int. J. Remote Sens. 2017, 38, 2218–2230. [CrossRef]
27. Li, M.; Shamshiri, R.R.; Schirrmann, M.; Weltzien, C. Impact of camera viewing angle for estimating leaf parameters of wheatplants from 3D point clouds. Agriculture 2021, 11, 563. [CrossRef]
28. Harwin, S.; Lucieer, A.; Osborn, J. The impact of the calibration method on the accuracy of point clouds derived using unmannedaerial vehicle multi-view stereopsis. Remote Sens. 2015, 7, 1933. [CrossRef]
29. Wen, W.; Guo, X.; Lu, X.; Wang, Y.; Yu, Z. Multi-scale 3D data acquisition of maize. In International Conference on Computer andComputing Technologies in Agriculture; Springer: Berlin/Heidelberg, Germany, 2017; pp. 108–115.
30. Roussel, J.; Geiger, F.; Fischbach, A.; Jahnke, S.; Scharr, H. 3D surface reconstruction of plant seeds by volume carving: Performanceand accuracies. Front. Plant Sci. 2016, 7, 745–758. [CrossRef]
31. Li, H.; Qian, Y.; Cao, P.; Yin, W.; Dai, F.; Hu, F.; Yan, Z. Calculation method of surface shape feature of rice seed based on pointcloud. Comput. Electron. Agric. 2017, 142, 416–423. [CrossRef]
32. Su, Y.; Xiao, L.-T. 3D visualization and volume-based quantification of rice chalkiness in Vivo by using high resolution Micro-CT.Rice 2020, 13, 1–12. [CrossRef]
33. Cervantes, E.; Martín Gómez, J.J. Seed shape description and quantification by comparison with geometric models. Horticulturae2019, 5, 60. [CrossRef]
34. Xu, T.; Yu, J.; Yu, Y.; Wang, Y. A modelling and verification approach for soybean seed particles using the discrete element method.Adv. Powder Technol. 2018, 29, 3274–3290. [CrossRef]
35. Yang, S.; Zheng, L.; He, P.; Wu, T.; Sun, S.; Wang, M. High-throughput soybean seeds phenotyping with convolutional neuralnetworks and transfer learning. Plant Methods 2021, 17, 1–17. [CrossRef] [PubMed]
36. Huang, X.; Zheng, S.; Gui, L.; Zhao, L.; Ma, H. Automatic extraction of high-throughput phenotypic information of grain basedon point cloud. Trans. Chin. Soc. Agric. Mach 2018, 49, 257–264.
37. Schnabel, R.; Wahl, R.; Klein, R. Efficient RANSAC for point-cloud shape detection. In Computer Graphics Forum; Wiley OnlineLibrary: Hoboken, NJ, USA, 2007; Volume 26, pp. 214–226.
38. Nüchter, A.; Rusu, R.B.; Holz, D.; Munoz, D. Semantic perception, mapping and exploration. Robot. Auton. Syst. 2014, 62, 617–618.[CrossRef]
39. Shannon, C.E. A mathematical theory of communication. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2001, 5, 3–55. [CrossRef]40. Vranic, D.V.; Saupe, D.; Richter, J. Tools for 3D-object retrieval: Karhunen-Loeve transform and spherical harmonics. In
Proceedings of the 2001 IEEE Fourth Workshop on Multimedia Signal Processing, Cannes, France, 3–5 October 2001; pp. 293–298.41. JeongHo, B.; Lee, E.; Kim, N.; Kim, S.L.; Choi, I.; Ji, H.; Chung, Y.S.; Choi, M.-S.; Moon, J.-K.; Kim, K.-H. High throughput
phenotyping for various traits on soybean seeds using image analysis. Sensors 2020, 20, 248. [CrossRef]42. Van den Bergen, G. Efficient collision detection of complex deformable models using AABB trees. J. Graph. Tools 1997, 2, 1–13.
[CrossRef]43. Kazhdan, M.; Hoppe, H. Screened poisson surface reconstruction. ACM Trans. Graph. 2013, 32, 1–13. [CrossRef]44. Liang, X.; Wang, K.; Huang, C.; Zhang, X.; Yan, J.; Yang, W. A high-throughput maize kernel traits scorer based on line-scan
imaging. Measurement 2016, 90, 453–460. [CrossRef]45. Hu, W.; Zhang, C.; Jiang, Y.; Huang, C.; Liu, Q.; Xiong, L.; Yang, W.; Chen, F. Nondestructive 3D image analysis pipeline to extract
rice grain traits using X-ray computed tomography. Plant Phenomics 2020, 3, 1–12. [CrossRef]46. Kumar, M.; Bora, G.; Lin, D. Image processing technique to estimate geometric parameters and volume of selected dry beans. J.
Food Meas. Charact. 2013, 7, 81–89. [CrossRef]47. Yalçın, I.; Özarslan, C.; Akbas, T. Physical properties of pea (Pisum sativum) seed. J. Food Eng. 2007, 79, 731–735. [CrossRef]48. Dickerson, M.T.; Drysdale, R.L.S.; McElfresh, S.A.; Welzl, E. Fast greedy triangulation algorithms. Comput. Geom. 1997, 8, 67–86.
[CrossRef]49. Funkhouser, T.; Min, P.; Kazhdan, M.; Chen, J.; Halderman, A.; Dobkin, D.; Jacobs, D. Marching cubes: A high resolution 3D
surface construction algorithm. ACM Trans. Graph. 2003, 22, 83–105. [CrossRef]50. Hughes, N.; Askew, K.; Scotson, C.P.; Williams, K.; Sauze, C.; Corke, F.; Doonan, J.H.; Nibau, C. Non-destructive, high-content
analysis of wheat grain traits using X-ray micro computed tomography. Plant Methods 2017, 13, 1–16. [CrossRef]
Related Documents











