国立大学法人 東京海洋大学 1 ロボット工学Ⅰ 東京海洋大学 海洋工学部 海洋電子機械工学科 清水 悦郎

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

国立大学法人
東京海洋大学
1
ロボット工学Ⅰ
東京海洋大学 海洋工学部 海洋電子機械工学科
清水 悦郎

2
ロボットとは?
複雑精巧な装置による人工の自動人形.人造人間.
一般に,目的とする操作・作業を自動的に行うことのできる機械または装置.
他人に操縦されて動く人.傀儡.
(広辞苑より)
英語で,humanoid,vehicle,manipulatorと呼ばれるものでも,日本ではロボットと呼ばれている.

3
ロボットの種類
産業ロボット
広く製造業と非製造業を含めた産業において自動化,省力化,無人化のために使用されているロボット.溶接,ガス切断,組立,塗装,検査ロボットなど多数利用されている
特殊作業ロボット
人間が立ち入ることのできない危険な環境下で人間に代わって作業をするロボット.現在は,遠隔操作によって動かされるものが多い
医療・福祉ロボット
看護士用パワーアシストロボット,院内サービスロボットや遠隔手術ロボット,生活介護ロボットなど
サービスロボット
人間の代行あるいは助手として働くロボットで,洗浄作業,清掃作業などをするロボット
アミューズメントロボット
レジャーや遊び・娯楽など,楽しませることを目的としたロボット

4
ロボット工学とは?
ロボットを製作し,動かすためには以下のような知識が必要となる
ロボットを構成する材料に関する知識
ロボットを動作させるための力を発生させるアクチュエータに関する知識
アクチュエータを動かすためのエネルギー源に関する知識
アクチュエータで発生した力を作用させたい場所まで伝達させるための知識
自身の場所や形状を計測するためのセンサに関する知識
ロボットを思い通りに自動的に動かすための自動制御に関する知識
自動制御を実現するためのコンピュータに関する知識
ロボット工学の講義では上記の項目に関する講義を行う
5
ロボットの基本構成
ロボットは以下のシステムより構成される
○ コンピュータシステム
動力装置の動かし方を決定する
○ 動力システム
動力を発生させる
○ ボディメカニズム(機構)
動力を伝達し所望の動作をする
○ センサシステム
現在の状態を計測する

6
ロボットのセンサ
ロボットを動かすためには,自身の内部状態と外部との関係の双方を知ることが必要不可欠である
ロボットにおいて状態を計測するために使用される機器がセンサである
自身の内部状態を知るために用いられるセンサを“内界センサ”,外部との関係を知るために用いられるセンサを“外界センサ”という

7
内界センサ
ボディを構成する動作機構の要素間の相互関係を計測する
人間は外界センサが発達しているため,ここで話をするような内界センサを持たないが,ロボットの場合は外界センサが未熟なため内界センサで補うことが必要である
具体的に計測するものは,ロボットの位置,速度,加速度や,各関節の角度,角速度,(角加速度)などである
内界センサには以下のようなものがある
・ ポテンショメータ(位置,角度)
・ ロータリエンコーダ(角度,角速度)
・ レゾルバ(角度)
・ タコジェネレータ(角速度)
・ 加速度センサ(加速度)

8
ポテンショメータ
可変抵抗器であり,全抵抗にかけられた電圧が,接点で分けられた抵抗比に分圧されることを利用するもの
構造が単純なため比較的環境に左右されないが,アナログ量として取り出されるため,ノイズ等の影響もあり精度は低い
角度を測るための回転型と,直進変位を測るための直線型がある
計測距離の計算式

9
ロータリエンコーダ
等間隔で設けられたスリットをフォトカプラの間で回転させることにより,角度に対応するパルス信号列を取り出すもの
パルスをカウントすることにより角度,単位時間あたりのパルスをカウントすることにより角速度を検出する
回転角度検出用として一般的に使用されるが,フォトカプラを使用するため,使用環境に留意する必要がある
最小角度対応パルスのみを出力するインクリメンタル型と位置を出力するアブソリュート型がある
(小野測器HPより)

10
レゾルバ
ステータコイルに正弦波電圧が印加され磁界が発生する.この磁界中に置かれたロータコイルからは位相差のある電圧が発生する.この位相差を検出することにより,回転角度を検出する
構造が簡単で堅牢なため実用センサとして多用されるが,信号はアナログ量であるため,ノイズ対策や分解能を考慮した利用が必要である
(ヤマハHPより)

11
タコジェネレータ
タコジェネレータは直流発電機であり,回転速度に比例した電圧が出力される
構造が簡単で環境に左右されない反面,角速度と電圧の関係の線形範囲が狭い

12
加速度センサ
ひずみゲージ型,半導体型,ピエゾ型など様々な種類のセンサが使用されている
ピエゾ型を例にとると,力を受けると起電力を発生する結晶を利用する
力が計測でき,おもりの質量が判っていれば, より加速度を計算により求めることが出来る
(小野測器HPより)

13
外界センサ
自身と自身以外との相互関係を計測する
人間が持つ外界を認識するためのセンサには以下のようなものがある
視覚
聴覚
触覚
味覚
嗅覚
平衡感覚

14
視覚
人間の視覚は,対象物の形,大きさ,材質,位置情報までを取り出す機能をもつが,まだ,このレベルまでには達していない
視覚の機能を持たないと,あらかじめ設定された動作点や姿勢を繰り返すだけの動作しか出来ない制約されたものとなってしまう
視覚機能の一部を実現するために,CCDカメラを用いるのが一般的である
カメラを用いた距離の計測方法としてはステレオ視による方法がある
人間の視覚とは異なる距離計測の手法としては,レーザ光,超音波,マイクロウェーブ等を発信し,反射光(音,波)が返ってくるまでの時間から距離を求める手法もある

15
超音波式距離センサ
超音波を発信し,対象物に当たって跳ね返ってくるまでの時間により距離を計測する
距離は以下の式により求められる
送信機 受信機
16
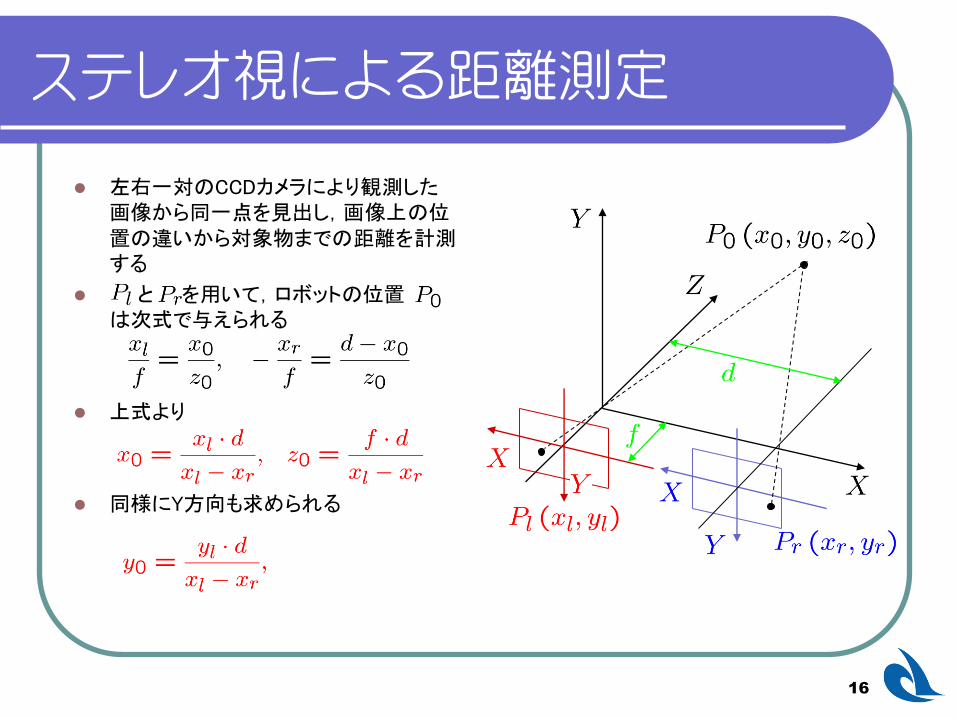
ステレオ視による距離測定
左右一対のCCDカメラにより観測した画像から同一点を見出し,画像上の位置の違いから対象物までの距離を計測する
と を用いて,ロボットの位置は次式で与えられる
上式より
同様にY方向も求められる

17
聴覚
聴覚は,音,あるいは言葉によって伝えられる情報を把握して行動に反映する手段
このためには,音から意味を抽出する言語理解の技術が必要となるが,現在はまだ研究段階
この技術と組み合わせて使用される発声についても,まだ研究段階
人間は音源の位置まで判断できるが,このような技術に関してもまだ研究段階
現状では,マイクとスピーカを用いて行われている

18
触覚
人間が柔らかいものや壊れやすいものを取り扱うとき,目で捕らえた対象物の情報に加えて,指先で触れた感覚に基づいて細心の注意を払って手を動かす
ロボットに,より細密な仕事をさせるためには,この感覚は不可欠
この機能の実現には,接触部の圧力,摩擦力,温度が計測できるセンサが必要であるが,個々の機能は実用化されているが,人間の手のような全ての項目を備えるセンサは開発段階

19
嗅覚
“におい”は嗜好に関わる感覚であるとともに,ガス漏れや腐臭など危険を回避するための感覚として位置づけられる
作業を目的とするロボットにとっては,必ずしも必要とされる機能ではないが,人間と共存するロボットを考えるには必要となる感覚
現在,アルコール,アンモニアなどごく一部のにおいについて半導体ガスセンサを利用した検出システムが開発されているが試行段階

20
味覚
味覚についても,ロボットの感覚としては,嗅覚と同様に,人間と共存するロボットに必要な機能
現在は,果物の糖度測定に利用されるセンサなどが実現されている程度で,辛さ,苦さなど総合的な味覚に対する検出技術も実用可能なレベルにはなっていない
21
平衡感覚
人間は自分の体の傾きを耳の三半規管により判断
ロボットではジャイロにより自分の姿勢を計測できる
ジャイロには,回転するコマが回転軸を保持しようとする機械的性質を利用した機械式ジャイロ,光ファイバの輪に光を通しておくと傾きの変化が光の位相差として取り出せることを利用した光ファイバジャイロや半導体を利用した半導体ジャイロなどがある

22
ロボットの基本構成
ロボットは以下のシステムより構成される
○ コンピュータシステム
動力装置の動かし方を決定する
○ 動力システム
動力を発生させる
○ ボディメカニズム(機構)
動力を伝達し所望の動作をする
○ センサシステム
現在の状態を計測する

23
ロボットのアクチュエータ
ロボットでは,アームやハンド,移動機構などを目的に合わせて動かす必要がある.このための動力源(アクチュエータ)には,自由かつ正確に制御できることが求められる
アクチュエータには,機構として回転型・直動型,動力源として電気式・油圧式・空気式のシステムが一般的に利用されている
回転型と直動型は関節の構造に依存し,動力源の違いは必要とする力,環境,アクチュエータの構造などによって決まる

24
ロボットのアクチュエータ
代表的なアクチュエータは以下に示すようなものである
-電気式アクチュエータ(回転・直動)
-油圧式アクチュエータ(回転・直動)
-空気圧式アクチュエータ(回転・直動)
-超音波モータ
-形状記憶合金
など

25
電気式アクチュエータ(回転型)
代表的なものはサーボモータとステッピングモータ
直流(DC)サーボモータは,流れる電流の大きさによって発生トルクが変わる,結果として回転数が変わる特性を利用したもの
電機子に電磁石を用いるブラシ型と永久磁石を用いるブラシレス型がある
制御はしやすいがメンテナンスの手間がかかる(ブラシ型)
(三菱電機HPより)

26
電気式アクチュエータ(回転型)
交流(AC)サーボモータには,同期型と誘導型がある
同期型はDCサーボモータと同様の構造となっている
誘導型は通常の誘導電動機と同様の構造となっている
ACモータは基本的にメンテナンスフリー
ACモータは周波数を変化させ制御するため,制御機構が複雑となってしまう
同期型
誘導型

27
電気式アクチュエータ(回転型)
ステッピングモータは電源に接続してもそのままでは回転しない
1個のパルスに対して一定の角度(ステップ角)だけ回転する
パルス列を入力することで,そのパルス数に対応した角度だけ回転するので位置センサが不要で,その位置に高精度で停止できる
ステッピングモータの断面図
(新日本無線HPより)

28
油圧式アクチュエータ(回転型)
油圧式アクチュエータは,小型で大きな力を出せる特徴がある
多回転型の油圧モータと,揺動型のロータリーシリンダがある
油圧モータは,基本的に回転型ポンプと同様の構造で,油の流れを回転運動に変えるものであり,回転数の調節は電磁サーボ弁を用いて流量を変えることにより行う
ロータリーシリンダは,円筒形の容器内を2分し両室内の油を出し入れすることで回転運動を発生させる

29
空気圧式アクチュエータ(回転型)
空気圧は,油圧に比べ出力は小さいがクリーンな動力源である
空気は圧縮性流体のため厳密な制御には不向きであるが,逆に圧縮性流体の特徴を生かして使用される場面もある
アクチュエータの種類,動作原理等に関しては,油圧と同様

DCモータの動作原理
回路に電流を流すとフレミングの左手の法則に従って動作する.
モータが回転し始めると,フレミングの右手の法則に従って,起電力が発生する
DCモータの数学モデル

31
電気式アクチュエータ(直動型)
電気的に直進運動を作る形式のものと,回転運動を直進運動に変換する形式のものがある
リニアモータは,電気的に直進運動を作り出すもの.磁界の反発,吸引作用により電機子部が移動する
モータシリンダは,サーボモータの回転をウォームギアなどの機構により直進運動に変換する

32
油圧式アクチュエータ(直動型)
シリンダとピストンの組み合わせで使用される
ピストンの両側に供給する油量を電磁弁サーボ弁で制御して,ピストンの位置や速度を調整する

33
空気圧式アクチュエータ(直動型)
シリンダとピストンの組み合わせで使用されるものと,ラバーアクチュエータと呼ばれるものがある
シリンダ-ピストン型の動作原理は油圧と同様
ラバーアクチュエータは,ゴム製の袋を網で外装することにより強度を持たせ,加圧するとゴム袋が膨れ全長が短くなる性質を利用したもの

34
ロボットの基本構成
ロボットは以下のシステムより構成される
○ コンピュータシステム
動力装置の動かし方を決定する
○ 動力システム
動力を発生させる
○ ボディメカニズム(機構)
動力を伝達し所望の動作をする
○ センサシステム
現在の状態を計測する

35
ロボットの機構
機構とは,機械を構成する要素の中で,運動を発生させたり,運動を伝える機能を持つ構造のこと
機構には,“減速機構”や“リンク機構”などがある.以降ではこれらについて解説する.
○ 減速機構
通常,モータは高速回転,低出力トルクであるため,ロボットではモータ
の回転速度を下げて,トルクを大きくして使用する.この役割を担うのが
減速機構である.(平歯車,遊星歯車,ハーモニックドライブなど)
36
減速機構
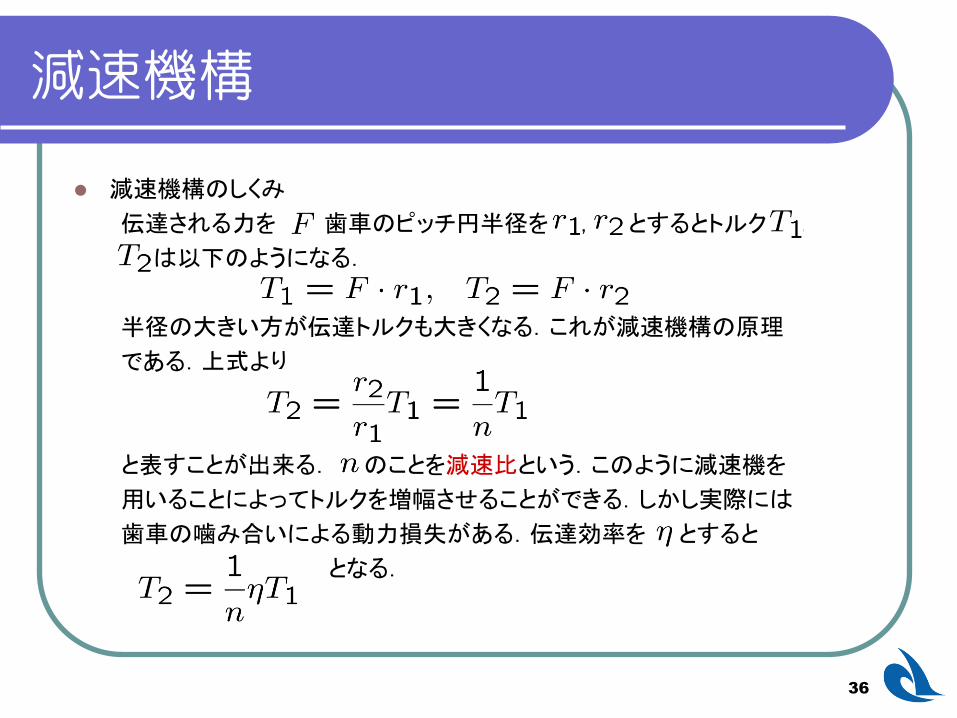
減速機構のしくみ
伝達される力を ,歯車のピッチ円半径を , とするとトルク ,
は以下のようになる.
半径の大きい方が伝達トルクも大きくなる.これが減速機構の原理
である.上式より
と表すことが出来る. のことを減速比という.このように減速機を
用いることによってトルクを増幅させることができる.しかし実際には
歯車の噛み合いによる動力損失がある.伝達効率を とすると
となる.

37
減速機構
減速機構のしくみ
速度で考えると以下のようになる. 伝達される速度 が一致することより,
上式より
と表すことが出来る.つまり,減速機構を用いることにより,伝達されるトル
は増幅することが出来るが回転速度が遅くなってしまう.

38
減速機構の例
遊星歯車機構
複数の遊星歯車と太陽歯車,遊星歯車を固定するキャリア,外周の内歯車から構成されている.
遊星歯車は通常,内歯車を固定し,太陽歯車を入力軸とし,自転,公転する遊星歯車の公転をキャリアを介し出力として取り出す.
車のAT,プリウスの駆動システムなどに用いられている.
太陽歯車の半径を ,遊星歯車の半径を とすると減速比 は以下のようになる.

39
減速機構の例
ハーモニックドライブ

40
ハーモニックドライブ
フレクスプライン,サーキュラスプライン,ウェーブジェネレータからなる.
フレクスプラインを弾性変形させて歯の噛み合いを実現している.
(ウェーブジェネレータのように回転しているわけではない)
フレクスプラインはサーキュラスプラインよりも歯の数が尐ないため,ウェーブジェネレータの1回転で歯の噛み合いが歯の数の尐ない分だけずれる(回転する)ことで減速される.
構成要素が尐なく,軽量,高減速比が得られやすいため,ロボットにはもっともよく使われる減速機である.
フレクスプラインの歯数を ,サーキュラスプラインの歯数を とすると,減速比 は以下のようになる.
41
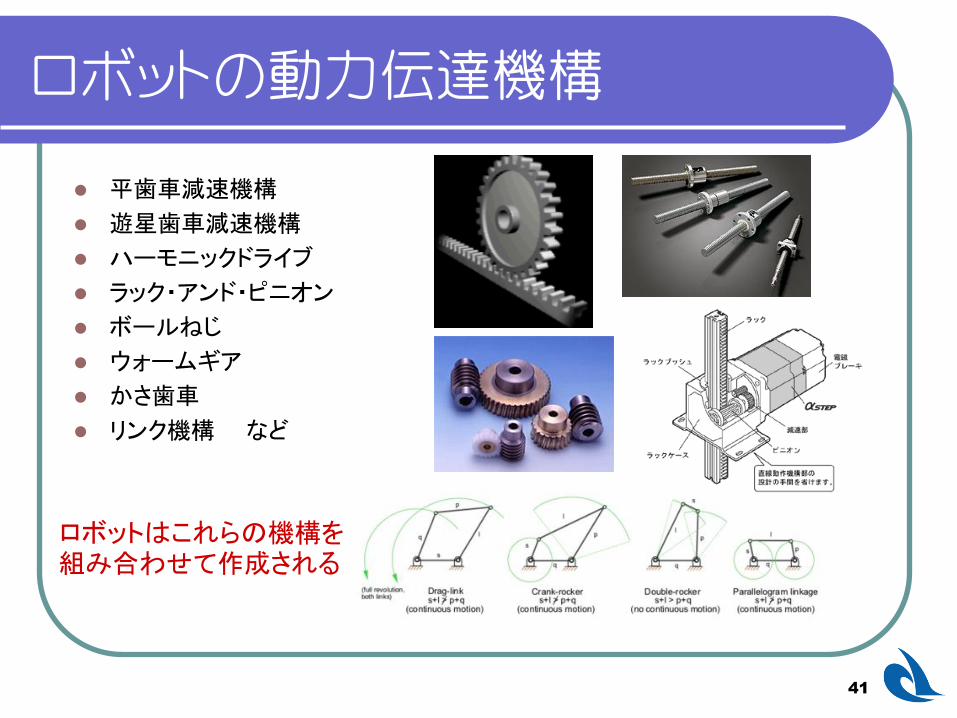
ロボットの動力伝達機構
平歯車減速機構
遊星歯車減速機構
ハーモニックドライブ
ラック・アンド・ピニオン
ボールねじ
ウォームギア
かさ歯車
リンク機構 など
ロボットはこれらの機構を組み合わせて作成される

42
リンク機構
○ リンク機構
ロッドとロッドがピンでつながり,互いにピンを中心に回転できる構造や,ロッドとロッドが同軸で回転できる構造,あるいはロッドが伸縮する構造のこと.
シリアルリンク機構は運動の自由度が大きいが構造的に弱く,先端位置の精度が補償できない.
パラレルリンク機構は運動面では拘束されるが大きな力を受けることが出来,先端位置の精度も補償出来る構造.
シリアルリンク機構 パラレルリンク機構

43
マニピュレータ
(動作例)

44
スチュアート型プラットフォーム
(動作例)

45
アームとハンドの機構
アームとハンドは人間の上肢の機能に類似した機能.基本的にシリアルリンク機構により構成.
アームに関しては,技術的に容易性もあり「マニピュレータ」と呼ばれる装置として実用化.製造業にとって必要な装置となり,「産業ロボット」として一般化.
ハンドに関しては,人間のように多数の指を持つのではなく,必要に応じて最小限の指を備えている.

46
アームの構成
記 号
回転関節
旋 回
回 転
直動関節 並 進

47
アームの機構
直交座標ロボットアーム
・ すべての関節を直動関節により構成したもの.
・ 位置決めに高い精度を出すことが出来る
・ 動作の自由度は尐ない
・ 作業範囲に比べロボット本体の占める空間が大きい
円筒座標ロボットアーム
・ ベース軸に回転関節,ほかは直動関節をもつ形状
・ 作業範囲に比べて設置面積が尐ない
極座標ロボットアーム

48
アームの機構
垂直多関節ロボットアーム
・ 第一関節に回転関節,その他は旋回関節を持つもの
・ 設置面積に対して広い作業範囲を確保することができる
・ 通称PUMAと呼ばれるロボット
水平多関節ロボットアーム
・ 基本的に回転関節のみで,先端の一関節のみ直動関節
・ 通称SCARAと呼ばれるロボット

49
ハンドの機構
はさみ型ハンド
・ 主に二本の爪によるつかみを行うもの
・ 爪の移動が平行移動するものと回転移動するものがある
多関節多指形ハンド
・ 人間の手のように作業が出来ることを狙いとしたもの
・ 1つの指は2~3関節,3~5本の指を持つものが作られている

50
移動機構
車輪型移動機構
クローラ型移動機構
歩行型移動機構
蛇型移動機構
・ マニピュレータとしての機能と移動機構を併せ持つもの
・ レスキューロボットなど向けに開発されている
吸盤型移動機構
・ ビルの外壁や天井などの点検・補修作業用ロボットに使用
・ 複数のゴム製の吸盤を吸着させながら移動
流体圧利用型移動機構
・ パイプラインの内面検査ロボットなどに使用
・ 装置の背面に流体圧を受け,流体力によってパイプ中を移動

51
ロボットの基本構成
ロボットは以下のシステムより構成される
○ コンピュータシステム
動力装置の動かし方を決定する
○ 動力システム
動力を発生させる
○ ボディメカニズム(機構)
動力を伝達し所望の動作をする
○ センサシステム
現在の状態を計測する

52
ロボット制御系設計手順
ロボット制御系を製作するためには安全性,効率という点より以下のような手順(解析)が必要となる
I. 目標作業の決定
II. ロボットの動作の決定
III. 数値シミュレーション等により動作の確認
IV. 実機を用いて動作の確認
これらはロボットだけに限らず,すべての制御系で必要となる作業である
以降ではマニピュレータを例に考える

53
マニピュレータの制御
マニピュレータの制御問題に対して前記のステップを適用すると以下のようになる
I. 物を掴む,運ぶなどの動作の決定
II. マニピュレータの動作の決定
III. 数値シミュレーション等により動作の確認
IV. 実機を用いて動作の確認
これらの問題を実際に行うにはどのような作業が必要か?

54
目標動作決定からマニピュレータの動作決定まで
I. 手先の動作が与えられた場合にそれを実現するための各関節の角度を求める.
II. 各関節の角度が与えられた場合にそれによって実現する手先位置を求める.
III. 各関節に加える力が与えられた場合に手先がどのように動くかを求める.
IV. 手先の動作が与えられた場合に実現するために必要な関節に対する力を求める.
上記の内容は大きく二つに分類する事ができる.
I. 幾何学的関係を扱うもの→運動学
II. 力学的関係を扱うもの→動力学,静力学
55
運動学とは?
実行すべき作業を記述する座標系とロボットが運動する座標系の幾何学的変換に関わる問題を扱う
I. 作業座標系が与えられ場合にそれを実現するための関節座標系を求める.→逆運動学
II. 関節座標系が与えられた場合にそれによって実現する作業座標系を求める.→順運動学

56
マニピュレータの場合
各関節の角度が決まった場合に手先位置を求めること(順運動学)は簡単
逆運動学は難しい

57
スチュアート型プラットフォームの場合
プラットフォームの位置が決定した場合,リンクの長さを求めること(逆運動学)は簡単
順運動学は難しい

58
運動学
右図のようなマニピュレータを考える
Y
Z
X
Y
Z
X
Y
Z
X
Y
ZX
YZ
X
各座標系の幾何学的関係が既知であれば,座標変換を行うことにより実行すべき作業を記述する座標系(ベース座標系)から作業座標系へ,またはその逆で,作業座標系からベース座標系へ変換できる.

59
運動学の基礎(リンクの表現)
運動解析ではリンクをベクトルとして扱う
x
y
z
P
yp
xp
zp
jk
i
1
0
0
,
0
1
0
,
0
0
1
kji
p
p
p
kpjpipP
z
y
x
zyx

60
運動学の基礎(並進変換)
●並進変換
x0
z0
y0
y1
x1
z1
1r
0r
P
: 座標系から見た 座標系原点の位置ベクトル
座標系において点 への位置ベクトルが と与えられる場合,
座標系から見た点 への位置ベクトル は以下のようになる
P1r
P0r
1
0
10
0P
0P
0 1
010 Prr

61
運動学の基礎(回転変換1)
●回転変換
例) 軸周りに 回転した場合を考えるz
0z1z
0y
0x
1y
1x
軸の上から見ると...z
0y
0x
1x
1y
0 1
1
0
P
P

62
運動学の基礎(回転変換2)
100
0cossin
0sincos
,
zR
回転行列
を で表すと以下のようになる Tzyx ppp 000 ,, Tzyx ppp 111 ,,
1
1
1
0
0
0
100
0cossin
0sincos
z
y
x
z
y
x
p
p
p
p
p
p

63
運動学の基礎(回転変換3)
各軸を中心とした回転行列は以下のようになるzyx ,,
cossin0
sincos0
001
,xR
cos0sin
010
sin0cos
,yR
100
0cossin
0sincos
,
zR
を中心とした回転行列
を中心とした回転行列
を中心とした回転行列z
y
x

64
運動学の基礎(回転変換1)
●回転変換
例) 軸周りに 回転した場合を考えるz
0z1z
0y
0x
1y
1x
軸の上から見ると...z
0y
0x
1x
1y
0 1
1
0
P
P

65
運動学の基礎(回転変換4)
例)座標系において点 への位
置ベクトルが と与えられた場合,
座標系から見た点 への位置ベクトル は以下のようになる
P1r
P0r
10 , rzRr
1
0
0z1z
0y
0x
1y
1x
0 1
P

66
運動学の基礎(回転変換3)
各軸を中心とした回転行列は以下のようになるzyx ,,
cossin0
sincos0
001
,xR
cos0sin
010
sin0cos
,yR
100
0cossin
0sincos
,
zR
を中心とした回転行列
を中心とした回転行列
を中心とした回転行列z
y
x
67
運動学の基礎(同次変換1)
●同次変換(並進変換と回転変換を一つにまとめたもの)
座標系は 座標系から ベクトルだけ並進移動した後,ある軸周りにある角度回転したとする
回転行列を , 座標系からみた点 の位置ベクトルが とすると, 座標系から見た点 の位置ベクトル は以下のようになる
01 0P
R 1 P
0 P1r
0r
010 PrRr

68
運動学の基礎(同次変換2)
前式では加算と乗算が含まれ不便であるので,一回の乗算により並進変換と回転変換を求めることが出来るように以下のように表す.これを同次変換という
1101
100 rPRr
10
0PRT
同次変換行列

69
運動学の基礎(n段の場合)
ここではn個のリンクがある場合を考える
11
10 rT
r
一個の場合は
のように表していたのでn個の場合は以下のようになる
11110
0 n
n
rTTT
r

70
運動学の基礎(例題)
ロボットの根本の座標系からみた手先位置は以下のように与えられる
TPyRr 466 00,
6
,yR
5
,zR
4
,yR
3
,zR
2
,yR
1
,zR
4P
3P
2P
1P
655 , rzRr
TPryRr 3544 00,
433 , rzRr
TPryRr 2322 00,
211 , rzRr
TPrr 110 00

71
運動学の基礎(例題)
ロボットの根本の座標系からみた手先位置は以下のように与えられる
T
T
T
P
PyRzR
PyRzRyRzR
rzRyRzRyRzRr
1
221
34321
6543210
00
00,,
00,,,,
,,,,,
6
,yR
5
,zR
4
,yR
3
,zR
2
,yR
1
,zR
4P
3P
2P
1P
1
1
10
0
0
,
10
0
0
,,
10
0
0
,,
1
6
321
6
3
5
2
43
1
210
rTTT
r
P
zR
P
yRzR
P
yRzRr

72
逆運動学 ー2LINKの場合ー (1)
手先の位置 と手先の姿勢が与えられた場合,それを実現する各リンクの角度 を求めよ
2
1
i
P S
100
0
0
,
0
yy
xx
y
x
sn
sn
Sp
p
P
1l
2l
x
y

73
補足)手先の姿勢とは?
手先の姿勢は,手先に定義した座標系が,原点に定義された座標系からみて,どのように変化しているかで表される
具体的には,並進変換は無視して,変換原点からの座標系の回転変換のみの積として表現できる
Y
Z
X
XY
X
Z
k
j
i
S
k
j
i
asn
asn
asn
k
j
i
zzz
yyy
xxx
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ

74
逆運動学 ー2LINKの場合ー (2)
回転行列より
100
0
0
100
0cossin
0sincos
2121
2121
yy
xx
sn
sn
よって
x
y
n
n1
21 tan
75
逆運動学 ー2LINKの場合ー (3)
一方,手先の位置座標より
21211
21211
sinsin
coscos
llp
llp
y
x
となり, は既知であるから,
212
2121
1cos
sintan
lp
lp
x
y
21

76
逆運動学 ー2LINKの場合ー (4)
よって与えられた位置,姿勢を実現するために必要な関節角度は以下のように求められる
212
21211
2
212
2121
1
1
21
cos
sintantan
cos
sintan
tan
lp
lp
n
n
lp
lp
n
n
x
y
x
y
x
y
x
y

77
ロボットハンドの位置・姿勢
一般にマニピュレータが運動する場合,手先は並進運動,回転運動する
並進運動,回転運動ともに3自由度であるため,手先の位置姿勢ベクトルは6自由度となる
位置ベクトルを ,姿勢ベクトルを とすると,位置姿勢ベクトルは以下のようになる
一般にrは各関節角度の関数となる.関節角度ベクトルを とすると以下のように表すことが出来る
Tzyx ,, T ,,
Tzyxr

78
ロボットハンドの速度・角速度
位置姿勢ベクトルは以下のように表される
このベクトルを時間tで微分することにより手先の速度・角速度が求められる(J(θ )をヤコビ行列という)
位置姿勢ベクトルは6次元であるから,関節が6個あるとJ(θ )に逆行列が求められる場合があり,その場合には所望の手先の移動速度があたえられた場合に,それを実現するための関節角速度を求めることが出来るが,それ以外の場合には求めることは困難である

79
ロボットの運動制御
ロボットの運動制御を行う場合,運動学で求めた数式(運動学モデル)や運動方程式を用いて,適当な物理量(角速度,トルクなど)を制御入力として制御系を設計する
所望の角速度やトルクを発生させるためには,ロボットに取り付けられたセンサーの情報を基に,アクチュエータ自身を制御しなければならない
変化する目標値を追いかける制御のことを追値制御といい,特に“制御量が位置や角度である自動制御”のことをサーボ機構と呼ぶ

80
サーボ機構のブロック図
演算処理回路
駆動回路(増幅器)
アクチュエータ
制御対象
センサ
コントローラ
目標値入力+
-

81
サーボ機構の主な構成要素
目標値入力部
目標となる回転角度や回転速度を入力
コントローラ
目標値を実現するために必要なアクチュエータの動作量を演算
アクチュエータ
実際に動作をさせる駆動系
センサ
動作状態を知るための計測系

82
サーボ機構の形式
サーボ機構はアナログサーボ系とデジタルサーボ系に分類できる
アナログサーボ系:
構成要素がすべてアナログ量で構成される
デジタルサーボ系:
すべてデジタル量で構成される
ハイブリッド方式:
アナログ量とデジタル量が混在する
サーボ機構を駆動源によって分類すると以下のようなものがある
・ 電気サーボ
・ 油圧サーボ
・ 空気圧サーボ

83
電気式サーボ機構
産業ロボットでは電気式サーボ機構が用いられることが多い
油圧サーボと比較して大きな力は得にくいが,低価格,簡単,清浄,低騒音,高信頼度という理由で,電気式サーボが使用される場合が多い

84
電気式サーボ機構のブロック図の例
制御器
目標値入力
(角度)+
-増幅器 サーボモータ
減速機
センサ
アーム
(コンピュータ) (モータ制御部)
(エンコーダ)

85
油圧式・空気圧式サーボ機構
アクチュエータに
油圧アクチュエータを適用したものが油圧サーボ機構
空気圧アクチュエータを適用したものが空気圧サーボ機構
である
油の圧縮性は小さく,潤滑性が良いので高速高出力のサーボ機構に使用される
空気は圧縮性があるため厳密な制御は難しく,ロボットの駆動機構にはあまり使用されていない
基本的に,圧力の高められた流体があり,その流体の流れを操作することによって,機械的な作用を発生させる
86
サーボ機構の解析
ロボットの運動制御を行う場合,運動学で求めた数式(運動学モデル)や運動方程式を用いて,適当な物理量(角速度,トルクなど)を制御入力として制御系を設計(サーボ機構を設計)する
一般に,ロボットの運動は非線形系方程式で表されるため,コントローラを設計するには,
線形近似をして線形制御理論を適用する手法
直接,非線形制御理論を適用する手法
がある.一般に,線形制御理論で十分に制御性能を満たせるのであれば,無理に非線形制御を適用する必要は無い

87
その他の制御
これまで説明してきた制御は,マニピュレータの“位置”を制御するものであったが,他にも“力”を目標とした“力制御”もある.力制御は研磨,組立等の作業を行う場合には重要となる
複数のロボットを協調させて動かす場合には,“位置制御”,“力制御”を組み合わせて行う必要がある.このような制御問題を特に“協調制御”という
また,移動ロボットを対象とする場合には,“移動コース”や“移動速度”,“衝突回避”などを考慮した制御が必要となる

88
ロボットの知能化
これまでの制御は,人間より与えられた具体的な目標値(動作方法)に従って動作する制御を行うものであった
行わせたい作業を指示するだけでロボット自身が動作方法を計画し作業を遂行するまでには,現在のところ,実用化には至っていない
ロボット自身で判断し動作するためには”知能化”が必要である
ロボットは機械であり,その機械的知能は人工知能(AI: artificial intelligence)と呼ばれる.人工知能は,まだまだ研究段階であり,一部の状況を除き,人間の知能のレベルまでは至っていない
Related Documents











