A. TUJUAN Mengukur posisi sudut persendian sesuai dengan tahapan fase-fase dalam gait cycle dan menentukan fungsi interpolasi posisi sudut pada persendian selama satu proses gait. B. ALAT DAN BAHAN 1. Data movie gerak jalan 2. Software #1 video converter 3. Software Matlab C. DASAR TEORI Berjalan adalah berpindahnya tubuh dari satu titik ke titik berikutnya dengan cara menggunakan kedua tungkai (bipedal : posisi tubuh selalu tegak selama proses berlangsung). Pola repetisi daripada penumpuan berat badan dari satu tungkai ke tungkai yang lain dengan heel-toe striding adalah fenomena yang membedakan manusia dengan hominids yang lebih primmitif (Napier, 1967). Berjalan merupakan suatu rangkaian dari gait cycle, dimana satu gait cycle dikenal dengan sebutan langkah (stride). Blaya (2000), mendefinisikan single gait cycle sebagai suatu periode dimana salah satu kaki mengenai landasan (ground), mengayun dan kaki tersebut kembali mengenai landasan. Siklus gait diperlihatkan oleh gambar berikut :

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

A. TUJUAN
Mengukur posisi sudut persendian sesuai dengan tahapan fase-fase dalam gait cycle dan
menentukan fungsi interpolasi posisi sudut pada persendian selama satu proses gait.
B. ALAT DAN BAHAN
1. Data movie gerak jalan
2. Software #1 video converter
3. Software Matlab
C. DASAR TEORI
Berjalan adalah berpindahnya tubuh dari satu titik ke titik berikutnya dengan cara menggunakan kedua tungkai (bipedal : posisi tubuh selalu tegak selama proses berlangsung). Pola repetisi daripada penumpuan berat badan dari satu tungkai ke tungkai yang lain dengan heel-toe striding adalah fenomena yang membedakan manusia dengan hominids yang lebih primmitif (Napier, 1967).
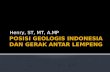
Berjalan merupakan suatu rangkaian dari gait cycle, dimana satu gait cycle dikenal dengan sebutan langkah (stride). Blaya (2000), mendefinisikan single gait cycle sebagai suatu periode dimana salah satu kaki mengenai landasan (ground), mengayun dan kaki tersebut kembali mengenai landasan. Siklus gait diperlihatkan oleh gambar berikut :
Gambar. Siklus gait (Swilling, 2005)
Siklus gait terdiri dari dua bagian, yaitu berdiri (stance) dimana kaki mengenai landasan dan bagian mengayun (swing) dimana kaki tidak mengenai landasan. Tahapan fase yang terjadi pada gait cycle (Swilling, 2005), adalah initial contact, loading response, midstance, terminal stance, pre swing, initial swing, mid swing, dan terminal swing.
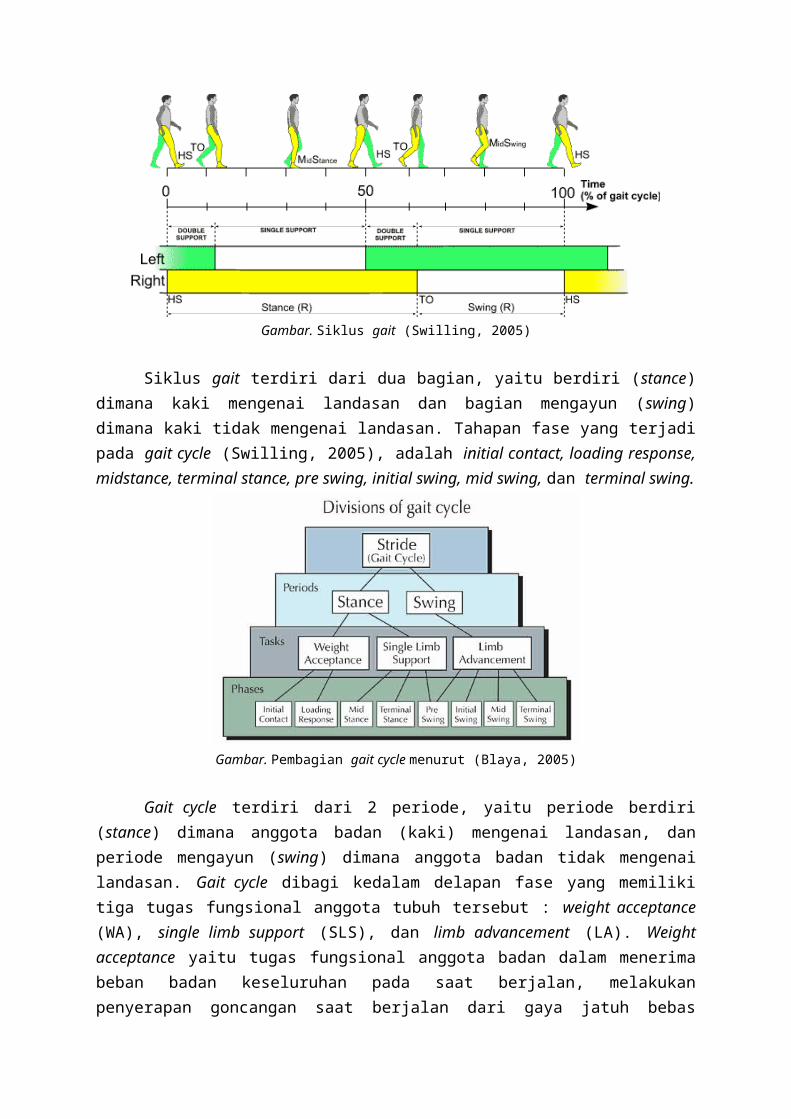
Gambar. Pembagian gait cycle menurut (Blaya, 2005)
Gait cycle terdiri dari 2 periode, yaitu periode berdiri (stance) dimana anggota badan (kaki) mengenai landasan, dan periode mengayun (swing) dimana anggota badan tidak mengenai landasan. Gait cycle dibagi kedalam delapan fase yang memiliki tiga tugas fungsional anggota tubuh tersebut : weight acceptance (WA), single limb support (SLS), dan limb advancement (LA). Weight acceptance yaitu tugas fungsional anggota badan dalam menerima beban badan keseluruhan pada saat berjalan, melakukan penyerapan goncangan saat berjalan dari gaya jatuh bebas tubuh, stabilisasi awal dalam periode berdiri dan memelihara momentum forward progression. Tugas tersebut terdiri dari 2 fase pada gait cycle, yaitu initial contact/heel strike (HS) dan loading response/foot flat (FF). Periode berdiri diikuti dengan pendukung anggota tubuh tunggal (single limb support/SLS), terdiri dari fase midstance dan fase terminal stance. Selama melakukan tugas weight acceptance, anggota badan berdiri dengan tanggung jawab total untuk menahan berat tubuh sementara anggota tubuh lainnya berada pada periode mengayun. Tugas fungsional ketiga yaitu limb advancement, dimana terdapat empat fase yang berperan pada limb advancement: terminal stance, preswing, initial swing, midswing, dan terminal swing. LA dimulai pada akhir periode berdiri, dimana selama fase tersebut anggota bdan melakukan advancement untuk mempersiapkan fase berikutnya. Fase preswing melakukan sekaligus dua tugas, yaitu tugas fungsional sigle limb support dan limb advancement (Blaya, 2000)
Vaughan (1999) menyatakan bahwa cara berjalan manusia merupakan penggambaran dari pendekatan top-down. Pada awal terjadinya proses gait, sebagai syaraf impalas yang terjadi didalam central nervous system (SSP) diakhiri dengan pembangkitan ground reaction forces (GRF) (anggota tibuh bagian bawah yaitu kaki). Karakteristik dari pendekatan tersebut berdasarkan pada sebab akibat, dimana ketika otot-otot diaktifkan akan membangkitkan gaya-gaya dan momen-momen yang saling berkaitan untuk mengeksekusi perintah system syaraf pusat, gaya-gaya dan momen yang terjadi mengakibatkan munculnya GRF pada kaki.
Gaya gabungan dan momen-momen menyebabkan rigid link segment (paha, betis, kaki, dan lainnya) memindahkan dan menghasilkan gaya pada lingkungan luar. Berikut adalah interaksi antar urutan gait cycle dalam berjalan (Vaughan, 1999), yaitu :
1. Registrasi dan aktivasi perintah berjalan oleh system syaraf pusat (central nervous system)

2. Perpindahan sinyal berjalan system syaraf tubuh (peripheral nervous system)3. Kontraksi otot-otot yang dapat menghasilkan denyut tubuh (tension)4. Pembangkitan gaya dan momen dalam synovial joints5. Pengaturan gaya dan momen gabungan oleh rigid link segment berdasarkan
antropometri tubuh6. Perpindahan (gerakan) dari segmen-segmen untuk mengenalinya sebagai fungsi dari
berjalan7. Pembangktan ground reaction forces (GRF)
Gait cycle dibagi menjadi dua bagian, yaitu berdiri (stance), ketika kaki mengenai
landasan, dan mengayun(swing), ketika kaki tidak mengenai landasan. Tahapan yang terjadi
pada gait cycle dibagi menjadi delapan fase, yaitu initial contact(heel strike), loading
response, mid-stance, terminal stance, pre-swing, initial swing, mid-swing, dan terminal
swing. Berikut ini akan dijelaskan satu persatu dari tiap fase tersebut disertai dengan
gambaran fase tersebut:
1. Initial Contact/Heel Strike (HO)
Awal dari cara siklus berjalan. Sesaat kaki mengenai
landasan, engkel berada dalam posisi normal, dan
lutut dalam keadaan tertutup atau kaki lurus. Heal
Strike (calcaneous) merupakan tulang pertama yang
menyentuh landasan. Pada saat fase ini, kaki
kanan(warna merah) yang berperan terlebih dahulu,
sedangkan kaki kiri(warna biru) masih dalam fase
yang terakhir dalam gait cycle yaitu terminal swing.
Dari gambar dapat diketahui bahwa yang terjadi adalah pinggul tertekuk, lutut
diperpanjang, dan pergelangan kaki yang dorsifleksi(pergerakan kaki ketika
ditapakkan ke permukaan rata) ke arah netral.
2. Loading Response (Foot Flat)
Melakukan kontak sepenuhnya dengan landasan dan
dalam keadaan rata (foot flat/FF) dengan landasan
(lihat kaki warna merah). Waktu pemijakan kedua
kaki ini dimulai ketika kaki melakukan kontak dengan
landasan dan berlanjut sampai kaki yang lain
terangkat untuk melangkah. Berat tubuh ditransfer ke
kaki kanan(merah). Fase ini penting untuk

penyerapan shock, penahan berat dan pergerakan maju. Untuk kaki kiri sedang
melakukan fase pre-swing. Prosentase waktu yang dibutuhkan untuk fase ini adalah
10% dari seluruh waktu yang diperlukan untuk melakukan satu gait cycle.
3. Midstance
Dimulai pada saat heel sesaat sebelum meninggalkan
landasan sehingga kaki berada sejajar dengan kaki
bawah bagian depan.tugas selanjutnya dari gait cycle
adalah dukungan tungkai tunggal terhadap seluruh
berat badan dan memberikan stabilitas pada leher
ketika pergerakan harus berlanjut. Prosentase waktu
yang dibutuhkan untuk fase ini adalah 10-30% dari
seluruh waktu yang diperlukan untuk melakukan satu
gait cycle.
4. Terminal Stance (Heel Off)
Fase terminal stance pada saat heel kaki kanan
(merah) meninggi (mulai meniggalkan landasan) dan
dilanjutkan sampai dengan heel dari kaki biru mulai
mengenai landasan. Dimulai ketika tungkai kaki
kanan naik dan berlanjut sampai tungkai kaki kiri
menyentuh landasan. Berat badan berpindah melebihi
kaki kanan(merah) seiring dengan meningkatnya
ekstensi pinggul yang meletakkan kaki pada sebuah
posisi terseret. Prosentase waktu yang dibutuhkan untuk fase ini adalah 30-50% dari
seluruh waktu yang diperlukan untuk melakukan satu gait cycle.
5. Pre-Swing (Toe-Off)
Fase pre-swing dimulai dengan fase initial contact
(heel strike) oleh kaki kiri (biru), dan kaki kanan
(merah) berada posisi meninggalkan landasan untuk
melakukan periode mengayun (toe-off). Fase ini
adalah interval double stance kedua dalam gait cycle.
Dimulai dengan initial contact kaki kiri(biru) dan
diakhiri oleh tumpuan ujung jari oleh kaki
kanan(merah). Kontak dengan landasan oleh kaki

kiri(biru) menyebabkan kaki kanan meningkatkan fleksi plantar pergelangan kaki dan
fleksi lutut serta menurunkan ekstensi pinggul. Transfer berat badan dari satu bagian
tubuh ke sisi yang lainnya. Prosentase waktu yang dibutuhkan untuk fase ini adalah
50-62% dari seluruh waktu yang diperlukan untuk melakukan satu gait cycle.
6. Initial Swing (Acceleration)
Fase initial swing dimulai pada saat telapak kaki
kanan (merah) mulai diangkat dari posisi landasan.
Dimulai ketika kaki meninggalkan landasan dan
berakhir ketika kaki yang berayun berlawanan dengan
kaki yang berdiri. Kaki kanan(merah) manjadi maju
dengan peningkatan fleksi pinggul dan lutut.
Pergelangan kaki hanya sebagian berdorsifleksi untuk
meyakinkan jarak dengan landasan. Pada fase ini
footdrop gait sangat terlihat. Kaki kiri dalam fase mid-stance. Prosentase waktu yang
dibutuhkan untuk fase ini adalah 62-75% dari seluruh waktu yang diperlukan untuk
melakukan satu gait cycle.
7. Mid-Swing
Fase mid-swing yang dimulai pada akhir initial swing
dan dilanjutkan sampai kaki merah mengayun maju
berada di depan anggota badan sebelum mengenai
landasan. Berlanjut dari fase titik akhir initial swing
dan berlanjut sampai bagian tubuh yang berayun
berada di depan badan dan tibia terlihat vertical.
Kemajuan kaki kanan(merah) terselesaikan dengan
fleksi pinggul selanjutnya. Lutut diperbolehkan
diperpanjang dalam respon gravitasi ketika pergelangan kaki berlanjut dorsifleksi ke
daerah netral. Kaki kiri dalam fase mid-stance yang agak terlambat. Prosentase waktu
yang dibutuhkan untuk fase ini adalah 75-85% dari seluruh waktu yang diperlukan
untuk melakukan satu gait cycle.
8. Terminal Swing (Decceleration)

Fase terminal swing merupakan akhir dari gait cycle,
terjadi pada periode waktu siklus dimana tungkai kaki
mengalami perpanjangan maksimum dan berhenti
pada saat heel telapak kaki kanan (merah) mulai
mengenai landasan. Pada periode ini, posisi kaki
kanan (merah) berada kembali berada depan anggota
badan, seperti pada posisi awal gait cycle. Dimulai
ketika tibia terlihat vertical dan berakhir ketika kaki
menyentuh landasan. Pergerakan anggota badan disempurnakan dengan ekstensi lutut.
Pinggul menjaga fleksinya dan pergelangan kaki kembali dorsifleksi ke daerah netral.
Dari delapan fase di atas, dapat dibagi lagi menjadi tiga bagian yang memiliki tiga tugas
fungsional anggota tubuh, yaitu weight acceptance (WA), single limb support (SLS), dan
limb advancement (LA). Berikut ini adalah bagan pembagian beserta keterangannya :
Gambar. Pembagian gait cycle(Jessica, Stanford University)
a. Weight acceptance(WA)
Weight acceptance adalah tugas fungsional anggota badan dalam menerima beban
badan keseluruhan pada saat berjalan, melakukan penyerapan goncangan saat
berjalan dari gaya jatuh bebas tubuh karena gravitasi, stabilisasi awal dalam
periode berdiri dan memelihara momentum forward progression. Tugas tersebut
terdiri dari 2 fase pada gait cycle, yaitu initial contact/heel strike dan loading
response/foot flat.
b. Single Limb Support (SLS)

Periode berdiri diikuti dengan pendukung anggota tubuh tunggal (single limb
support/SLS), terdiri dari fase midstance dan fase terminal stance. Selama
melakukan tugas weight acceptance, anggota badan berdiri dengan tanggung
jawab total untuk menahan berat tubuh sementara anggota tubuh lainnya berada
pada periode mengayun(swing).
c. Limb Advancement(LA)
Pada tugas fungsional ini terdapat empat fase yang berperan, antara lain: terminal
stance, pre-swing, initial swing, mid-swing, dan terminal swing. LA dimulai pada
akhir periode berdiri, dimana selama fase tersebut anggota badan melakukan
advancement untuk mempersiapkan fase berikutnya. Fase pre-swing melakukan
sekaligus dua tugas, yaitu tugas fungsional sigle limb support dan limb
advancement.
D. DATA HASIL PENGAMATAN
Dari hasil pengamatan video yang telah diconvert menjadi gambar dan diolah dengan
software matlab, didapatkan data sebagai berikut:
NoNama
File
HIP KNEE ANGKLE
x y x y x Y
1 0 3.5 36.5 51.29 327.79 127.6 573.79
2 1 2.5 37.5 51.55 327.5 127.54 573.36
3 2 3.25 37.25 53.58 327.51 127.59 573.07
4 3 0 0 52.44 326.81 128.45 573.26
5 4 0 0 52.03 327.9 128.45 537.25
6 5 2.5 35.5 61.63 327.02 128.11 573.03
7 6 5.5 36.5 55.42 321.92 128.49 572.95
8 7 21.08 28.08 70.59 319.125 129.9 572.72

9 8 94 18 125.91 314.25 135.35 573.19
10 9 153.27 10.38 164.31 313.59 137.5 573
11 10 190.89 4.37 180.65 321.55 137.5 577.08
12 11 217.65 12.57 195.61 323.83 138.93 554.38
13 12 286.2 16.9 233.86 313.86 142.91 532
14 13 357.06 25.5 287.17 303.82 157.73 492.91
15 14 418.5 45.35 395.5 313.5 218.31 469.65
16 15 430 39.35 0 0 271.45 541.16
17 16 445.83 37.83 545.85 298.08 605.43 549.65
18 17 483.5 39.61 577.09 307.04 628.81 557.5
19 18 0 0 626.58 313.83 634.47 558.2
20 19 640.5 26.5 667.26 315.26 637.32 558.79
21 20 686.5 29.5 690.98 318.38 638.98 558.79
22 21 721.5 29.83 709.42 320.57 639.91 558.79
23 22 724.16 31.27 710.98 322.01 639.61 558.97
24 23 718 29.5 709.18 321.75 639.14 558.55
25 24 744.64 37.5 716.26 320.5 639.55 556.27
26 25 758.78 42.35 723.7 315.6 641.11 552.6
27 26 796.13 50.59 752.94 311.98 649.72 534.19
28 27 810.92 57.21 760.94 308.87 654.14 527.5
E. ANALISIS DATA
Dari data yang telah didapatkan, akan dilakukan analisis dengan menyajikannya
menjadi grafik posisi sudut persendian dari tiap gambar dari hasil converter video terhadap
waktu. Waktu yang dibutuhkan untuk melakukan satu gait cycle dari video yang digunakan

adalah 14 detik sedangkan gambar yang diambil adalah dua gambar tiap detiknya. Berikut ini
adalah grafik posisi sudut sendi sumbu x terhadap waktu :
Grafik posisi sudut sendi sumbu x terhadap waktu
Sedangkan untuk grafik posisi sudut sendi sumbu y terhadap waktu adalah sebagai berikut :
Grafik posisi sudut sendi sumbu y terhadap waktu

Perhitungan fungsi interpolasi posisi sudut sendi gait cycle pada tiga titik(hip,knee, dan
ankle) menggunakan bantuan Ms. Excel untuk menentukan fungsi binomialnya
1. Hip
Grafik fungsi interpolasi hip sumbu x terhadap waktu
Grafik fungsi interpolasi hip sumbu y terhadap waktu

2. Knee
Grafik fungsi interpolasi knee sumbu x terhadap waktu
Grafik fungsi interpolasi knee sumbu y terhadap waktu

3. Ankle
Grafik fungsi interpolasi ankle sumbu x terhadap waktu
Grafik fungsi interpolasi ankle sumbu y terhadap waktu

Perhitungan posisi persendian pada tiap fase gait cycle berdasarkan waktu dari video
yang digunakan, yaitu 14 detik.
A. Initial contact / heel strike. (0% dari siklus berjalan)
t = 0% x 14s = 0s(dianggap pada detik pertama dari video)
HIP : x= 14,534; y = 17,116
KNEE : x= 12,294; y = 320,37
ANKLE : x= 58,118; y = 576,23
B. Loading response / foot flat. (10% dari siklus berjalan)
t = 10% x 14s = 1,4s
C. Mid-stance. (30% dari siklus berjalan)
t = 30% x 14s = 4,2s
D. Terminal stance / heel off. (50% dari siklus berjalan)
t = 50% x 14s = 7s
E. Pre-swing / toe off. (62% dari siklus berjalan)
t = 62% x 14s = 8,68 s
F. Initial swing / acceleration. (75% dari siklus berjalan)
t = 75% x 14s = 10,5s
G. Mid-swing. (85% dari siklus berjalan)
t = 85% x 14s = 11,9s
H. Terminal swing / deacceleration. (100% dari siklus berjalan)
t = 100% x 14s = 14s
Persamaan :
HIP :
X = 0.0003t5 - 0.0157t4 + 0.1674t3 + 3.4727t2 - 22.238t + 14.534
y = 0.0003t5 - 0.0214t4 + 0.5416t3 - 5.6909t2 + 21.232t + 17.116
KNEE :
x = 0.0012t5 - 0.0865t4 + 2.1289t3 - 19.048t2 + 66.148t - 12.594
y = -0.0012t4 + 0.0702t3 - 1.2176t2 + 5.9632t + 320.37
ANKLE :

x = 0.002t5 - 0.1511t4 + 4.0662t3 - 43.56t2 + 175.21t - 58.118
y = -0.0002t5 + 0.0109t4 - 0.1727t3 + 0.5801t2 + 1.3057t + 567.23
Hasil Perhitungan :
t hip x hip y knee x knee y ankle x ankle y
1.4 -9.3819596 48.194977 112.38634 37.088963 326.52 569.76188
4.2 -9.694165 61.598948 166.21832 38.977882 328.76455 573.28227
7 53.7137 59.7846 99.4415 16.2312 323.6474 568.3682
8.68 118.09334 86.80057 80.798867 -9.4232112 319.49073 561.34787
10.5 204.76152 148.12674 104.85814 -58.806809 315.4224 551.93859
11.9 279.93995 216.45894 157.74611 -124.16264 313.14184 544.74373
14 400.4272 344.1764 285.7052 -298.3516 311.7348 536.4902
Analisis Hasil Perhitungan :
Fase Hip(x;y) Knee(x;y) Ankle(x;y)
Initial contact 14.53;17.116 12.294;320.37 58.118;576.23
Loading response -9.38;48.19 112.39;37.09 326.52;568.76
Mid-stance -9.69;61.598 166.22;38.978 328.76;573.28
Terminal stance 53.713;59.785 99.44;16.231 323.64;568.36
Pre-swing 118.09;86.8 80.798;-9.423 319.49;561.347
Initial swing 204.76;148.126 104.858;-58.806 315.422;551.938
Mid swing 279.94;216.458 157.746;-124.162 313.141;544.743
Terminal Swing 400.42;344.176 285.705;-298.352 311.734;536.49
F. PEMBAHASAN
Pada praktikum ini akan dipelajari posisi sendi dalam siklus gait. Tujuan dari
praktikum ini adalah mengukur posisi sudut persendian sesuai dengan tahapan fase-fase
dalam gait cycle dan menentukan fungsi interpolasi posisi sudut pada persendian selama satu
proses gait.
Berjalan merupakan suatu rangkaian dari gait cycle. Satu siklus berjalan atau gait cycle
adalah satu periode saat tumit salah satu kaki mengenai landasan (heel strike), mengayun,
sampai tumit pada kaki yang sama tersebut mengenai landasan kembali. Satu siklus tersebut
dikatakan satu siklus penuh atau total 100%. Satu gait cycle terdiri atas 2 fase, yaitu fase

berdiri (stance phase) dan fase mengayun (swing phase). Tahapan fase yang terjadi pada satu
siklus berjalan terdiri atas:
a. Initial contact (heel strike)
b. Loading response (foot flat)
c. Mid-stance
d. Terminal stance (heel off)
e. Pre-swing (toe off)
f. Initial swing (acceleration)
g. Mid-swing
h. Terminal swing (deacceleration)
Pengukuran posisi sendi dan penentuan fungsi interpolasi posisi sudut pada persendian
dilakukan dengan menggunakan sebuah data movie orang berjalan, software video converter
dan software matlab 7.0. Sebenarnya praktikum ini bisa dilakukan secara nyata dengan
seorang praktikan yang memeragakan gerak berjalan untuk 1 siklus gait, hanya saja
dibutuhkan ruangan khusus dan peralatan yang tidak dimiliki di laboratorium.
Ketika praktikum, kami mengamati sebuah video seseorang yang berjalan atau
melakukan gait cycle. Orang tersebut sudah dalam keadaan siap praktek, yaitu harus dalam
ruangan yang telah ditentukan, memakai sebuah marker pada ketiga titik yang akan diteliti,
yati hip (pinggul), knee (lutut) dan ankle (pergelangan kaki). Dari video tersebut kemudian
di-convert menjadi image sesuai dengan keinginan kita dengan menggunakan software #1
video converter. Dari software tersebut kita bias menentukan banyaknya image yang kita
inginkan untuk tiap detik video tersebut. Video yang digunakan berdurasi 14 detik dan setting
yang digunakan pada software tersebut adalah 2 image tiap detik, sehingga akan dihasilkan
28 image yang menunjukkan pergerakan orang dalam video itu tiap detiknya.
Setelah video selesai di-convert menjadi image, image tersebut diolah dengan
menggunakan software pengolahan citra yaitu Matlab 7.0. proses pengolahannya adalah
mendeteksi marker yang ada pada tiga titik persendian pada orang dalam video untuk
diketahui posisi sudutnya. Dengan menggunakan kode program yang telah ditentukan, akan
didapatkan posisi ketiga marker dalam posisi (x,y). pembacaan nilai (x,y) dimulai dari pojok
kiri atas yang berperan sebagai titik (0,0) dan bergeser ke kanan untuk x positif dan ke bawah
untuk y positif. Hasil proses pencitraan tersebut berupa gambar threshold dari image yang
didapat dan hanya akn terlihat posisi markernya saja.

Setelah diperoleh posisi hip, knee dan angkle dalam posisi x,y di 28 gambar yang ada,
maka dibuat grafiknya menurut sumbu x dan sumbu y sekaligus grafik untuk mendapatkan
persamaan interpolasinya kemudian menghitung interval waktu tiap-tiap fase dalam gait
cycle dengan menggunakan karakteristik maisng-masing fase. Seperti misalnya pada saat
loading response, waktu yang dibutuhkan adalah 10-30% dari waktu keseluruhan gait cycle,
yang dalam hal ini adalah 14 detik. Begitu juga untuk semua fase dalam gait cycle. Setelah
itu dapat kita ketahui image mana yang mendekati nilai yang didapatkan dari hasil analisi
data tersebut(yang sesuai dengan fungsi interpolasi). Dengan hanya data persentase waktu,
dapat kita tentukan image mana yang sesuai dengan fase gait cycle tersebut. Tetapi dengan
adanya interpolasi dapat mengetahui posisi sudut persendiannya.
Dengan mengetahui posisi sudut persendian dari fase-fase gait cycle maka nantinya
data ini bisa digunakan untuk mengetahui berbagai kelainan yang ditunjukkan dengan adanya
ketidaknormalan pada cara jalan, fase gait cycle, serta sudut persendiannya. Seperti penyakit
Spastic Cerebral Palsy dan beberapa penyakit yang berkaitan dengan otot ekstremitas bawah
lainnya.
G. KESIMPULAN
1. Posisi sudut persendian pada tiap-tiap fase gait cycle adalah sebagai berikut:
Fase Hip(x;y) Knee(x;y) Ankle(x;y)
Initial contact 14.53;17.116 12.294;320.37 58.118;576.23
Loading response -9.38;48.19 112.39;37.09 326.52;568.76
Mid-stance -9.69;61.598 166.22;38.978 328.76;573.28
Terminal stance 53.713;59.785 99.44;16.231 323.64;568.36
Pre-swing 118.09;86.8 80.798;-9.423 319.49;561.347
Initial swing 204.76;148.126 104.858;-58.806 315.422;551.938
Mid swing 279.94;216.458 157.746;-124.162 313.141;544.743
Terminal Swing 400.42;344.176 285.705;-298.352 311.734;536.49
2. Berikut ini adalah fungsi interpolasi dari masing-masing persendian:
HIP :
X = 0.0003t5 - 0.0157t4 + 0.1674t3 + 3.4727t2 - 22.238t + 14.534
y = 0.0003t5 - 0.0214t4 + 0.5416t3 - 5.6909t2 + 21.232t + 17.116
KNEE :
x = 0.0012t5 - 0.0865t4 + 2.1289t3 - 19.048t2 + 66.148t - 12.594

y = -0.0012t4 + 0.0702t3 - 1.2176t2 + 5.9632t + 320.37
ANKLE :
x = 0.002t5 - 0.1511t4 + 4.0662t3 - 43.56t2 + 175.21t - 58.118
y = -0.0002t5 + 0.0109t4 - 0.1727t3 + 0.5801t2 + 1.3057t + 567.23
DAFTAR PUSTAKA
Ama, Fadli dkk. 2012. Pedoman Praktikum Biomekanika & Biotransport. Surabaya :
FSAINTEK, UNAIR.
Blaya, J.A., 2000, Force-Controllable Ankle Foot Orthosis (AFO) to Assist Drop Foot Gait,
Thesis, Master of Science in Mechanical Engineering, Massachusetts Institute of
Technology.
Kerrigan, D Casey et al. 1998. Gait Analysis. Philadelphia: Rippincott Ravens
Publisher.http://mechse.illinois.edu/media/uploads/course_websites/
k_gaitanalysis.20091016.4ad931391ce4c4.08092333.pdf diakses pada tanggal 27
November 2012 pukul 6.38 WIB.
http://zahstraces.blogspot.com/2012/04/gait-control-motor-learning.html diakses pada tanggal
27 November 2012 pukul 08.17 WIB.

LAMPIRAN :



Related Documents