Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript


-.-
Truth is much too complicated to allow anything but ap\oximation!lohn von Neuma.n (1901-19s7).
CHAPTER
THREE
Shallow Water Systems and lsentropicCoordinates
oNVENTToNALLY, 'TH E SHALLoW WATER EeUATIoNS describe a thin layff of constant densityfluid in hydrostatic balance, rotating or not, bounded from below by a dgial surfaceand ftom above by a free suface, above which we suppos€ is another fluid of
negligibl€ inertia. Such a configuration can b€ generalized to muttiple layers of tnmisciblefluids lying one on top of anoth€r, forming a'stacked shallow water' system, and this classof svsrcms rs rhe main sublecr of rhi\ chapler.
Th€ single{ayer model is one of the simplest useful models in geophysical fluid al}rnamics,b€cause it allows for a consideration of the eff€cts of rotation in a simple framework wittroutthe complicating eff€cts of stratification. By adding layers w€ can subsequently study theeffects of stratification, and the model with just two layers is not orily a simple model ofa stratified fluid, it is a suDrisingly good model of many phenomena in the ocean andaturcsphere. Indeed, the mod€ls are more thanjust pedagogical tools we will find thartherc is a close physical and mathematical anatogy between the shatlow water equationsand a description of the continuously statifi€d ocean or atmosphere $.ritten in isopycnal orismtropic coordinates, lyirh a meaning beyond a cohcid€ntal similarity in the equations. Webegin with the single'lay€I case.
1I DYNAIVICS OF A SINCLE, SHALLOW LAYER
Shallow water dFamics apply, by definition, ro a fluid tayer of constant density in which thehorizontal scale of rhe flow is much grearer rhan the layer depth. The fluial motion is fullydetemined by the momentum and mass contiluity equations, and because of the assumed
t23

124 Chapter 3. ShallowWater Systems and lsentropic Coordinates
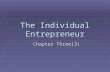
Fig. 3.1 A shallowwater system. h is the thickness of a water cotumn, I{ irs meanthickness. 4 the height of rhe fre€ surfac€ and 4, is the heisht ofthe tower, riqid,surface, above some arbitrary origin! typicalty (hosen such that the average of 4, iszero. A4 is the deviation free surface.height, so we have 4 = nb + h = E + An.
small asp€ct mtio the hydrostatic approximation is welt satisfied, anal we invoke this fromthe outset. Consider, then, fluid in a container above which is another fluid of negligibl€d€nsity (and therefore negligible inertia) retative to the fluid of interest, as illustrated inFig. 3.1. As usual, our notation is that r = x.i + t/j + xrk is the thee dimensional vetocityand r, = xri + ,j is the horizontal v€locity. I!(r,Jr') is the thickness of the liquid cohjrnn,H is its mean height, and 4 is the height of the free surface_ In a flat-bottomed container4 = l'!, whereas in general h = 4 4r, where t, is the height of the floor of the container.
3.1.1 Momentum €quationsThe vertical momentum equation is just the hydrostatic equation,
l.
and, because density is assumed constant, we may inte$at€ this to
(3.1)
p(x,y.zl = pg2 + po. (3.2)
p\x, y, z) = pgh\x,y ) - z). (3.3)
(3.4)
(3.s)
ap
At the top of the fluid, z : r?, th€ pressure is det€mined by the w€ighr of the overlying fluidand this is as$med to be negtigible. Thus, p = 0 at z : r| giving
The consequenc€ of this is that rhe horizontal gradient of plessule is independenr of height.That is
_ .a .a
Fluid
Topography

!
3.1 Dynamics of a Single, Shallow Layer
is the gradient opemtor at constant z. (In the rest of this chapter we will drop th€ subscript2 ur ess that causes ambiguity. The three-dimensional gradient operator will be denotedby V3. we will also mostly use cartesian coordinates, but the shallow water equationsmay certainly be applied over a spherical planet - indeed, 'Laplace's tidal equations' are
essentially the shallow water equations on a sph€re.) The horizontal mom€ntum equations
therefore become(3.6)
The nght-hand side of this equation is independent of the verocal coordinate z. Thus, if the
flolv is initially independent of z, it must stay so. (This z independence is unrelated to thatarising from the rapid rotation necessary for the Taylor-houdman eff€ct.) The velocities uand u are functions of r., j'l and t on1y, and th€ horizontal momentum equation is therefore
I25
DxIw= pvP=-Svn
Dx au au auor=ai+ t+r/aw:-.4v4.
That the horizontal velocity is ind€pendent of z is a consequence of tie hydrostatic equation,which ensures that the horizontal pressure gradient is hdependent of height. (Another
starting point would be to take this independence of the honzontal motion with height as
the defnihbn of shalow water flow. In real physical situations such independence does nothold exactly for example, ftiction at the bottom may induce a vertical dependence ol theflow in aboundary layer.) ln the presence of rotation, (3.7) easily gen€ralizes to
(3.7)
t
(3.8)
wher€ / = /k. Just as with the primitive equations, / may be constant or may vary withIatitude, so that on a spherical planet / : 2r, sin I and on the r-plane / = /0 + p/.
3.1,2 Mass continuity €quation
Fron firct pfinciples
The mass contained in a fluid column of height h and cross sectional area A is given by
Ia p h .lA (see Fig. 3.2). If th€r€ is a net flux of fllltd across the colunm boundary &v advection)
th€n this must be balanced by a n€t increase in the mass in A, ard therefore a net increase
in the height of th€ water colurnn. The mass converyence into th€ column is given by
where S is the area of the vertical boundary of the column. The strfac€ area of the column is
romposed of elements of area ,xn 51, where d, is a line el€ment ctcumscribing the colulmand n is a unit vector perpendicular to th€ boundary, pointing outwards. Thus (3.9) becomes
IF^ | Phu dl'
Using the divergence theorem in two dimensions, (3.10) simplifies to
l- = mass flux in = J lu . dS, (3.9)
(3.10)
svnDu,6l+r /u:
F^ = - Iav .(puhi M, (3.11)

126 Chapt€r 3. Shallow Warer Systems and tsentropic Coordinates
Fis.3.Z The mass budget for a col-umn of area A in a shallow wate. system. The fluid leaving th€ column is
{phu ^dI \ hete r is the unit vec,
tor normalto the boundary ofthe fluidcolumn. There is a non-zero venicalvelocity at the rop ofthe column ifthemass convergenc€ into rhe column is
where the integral is over rhe cross-s€ctional area of the fluid column (tooking down ftomabove). This is balanced by the local increase in h€ight of th€ water colunn, given by
o-= ft1,a,: frl^,n* =J^,u** (3.r2)
Because p is constant, the balaffe b€tlveen (3.11) and (3.t2) teads to
j^[ff., . ou]ao=o, (3.13)
and because the area is a$itrary the integrand itselJ must vanish, whence,
a!t,.o6=o(3.14)
or equivalently
Dh|);+hv. =0 (3.1s)
This dedvation holds whether or not the lower surface is flat. If it is, then h = 4, and if noth=4 4r. Equations (3.8) and (3.14) or (3.I 5) form a comptete set, surrunadzed in rheshaded box on the next page.
From the 3D mass conservation equation
Since the fluid is incompressible, the three-dimensionat mass continuity equation is justV . r = 0. Writing this our in component form
Auaz \ax ay )
:-V u. (3.16)

--
3.1 Dynamics of a Single, Shallow Layer
The Shallow Water Equations
For a single'layff fluid, and ircluding the Coiolis terE, the inviscid shallow water
127
Dn-momentum: 6t+J/ =-gvn.
Dhmass continuit'4 Dt +lrv u-0 or
(sw1)
#+v.(hr)=0, (sw.2)
where is the ho zontal velocity, h is the total fluid thicloess, 4 is the height
of the upper free surface and 4, is the height of the lower surface (the bottom
topogaphy). Thus, h(t, y,t) = n\x,y,t) 4, (x, v ). The material derivative is
DaaaaJ;=t-u o- at*uar*'av'
with the rightmost explesion holding in Cartesian coordinat$.
tuh) -u(4b): -hv 'u. (3.17)
(sw.3)
Inte$ate this from the bottom of the flural (z = r,r) to the top (z = 4), noting that the
dght-hand side is indep€ndent of z, to grve
Ar the top the v€rtical velocity is the material derivative of the positron of a partiorlar fluid
el€ment. But the position of the fluid at the top is just r], and th€rcfore (see fig. 3 2)
wr =U.Dt'
At the bottom of the flurd we have similarly
. Dnbu\nbt = it '
where, apart from ea hquakes and the like, Anrlaf = 0. Using (3.18a'b)' (3.17) becomes
(3.r8a)
(3.18b)
or. as in (3.15),
!{o ,o) *no u=o
DhDt +hV.n=0.
(3.19)
(3.20)
3,1.3 A rigid lid
lte case where the upp€r surface is held flat by the imposition of a rigid lid is sometimes ofint€Iest. The ocean sugg€sts on€ such example, since the bath)T netry at the bottom of the
ocean prc!'rdes much Iarger vadations in fluid thclmess than do the small vaiiations in ttre

124 Chapt€r 3. Shallow Water Systems and lsentropic Coordinates
height of the ocean sufac€. Suppose then that the upper surface is at a constant height IIthen, from (3.14) with ahlaf = 0, th€ mass conservadon equation becomes
vh.(lthbi =o, (3.21)
where h, = H . nr. Note that (3.2r) alows us to define an incompressible mass'tlansport
Although the upper surface is flat, the pressur€ th€re is no longer constant because a
force must b€ provided by the rigid lid to keep the surface flat. The horizontal momentumequation is Daa l-
ot = p"Pna'
where pxd is the pressure at the lid, and th€ complet€ €quations of motion are then (3.2I)and (3.22).1 If the lower surface is flat, the trvo-dimensional flow itself is div€rgence-free,
and the equations reduce to the tlvo-djmensional incompressible Euler equations.
3.1a4 Stretching and the vertical velocity
Berause thc hodzontal velocity is depth independent, the vertical velocity plays no role inadvectioL Howev€r, 1r/ is certaidy not zero for then the ftee surface would be unable tomove up or don'n, but because of the vertical independence of th€ hodzontal flow 1, does
have a simple vertical structurei to determine this we wrte the mass conseNation equatior
au. - .v.
and integrat€ upwards ftom tle bottom to give
u = wb - (v u)(z nb).
(3.23)
13.24)
Thus, th€ vetical velocity is a linear function of height. Equation (3.24) can be written as
(3.2s)
i3.26)
(3.27)
which in turn gives
(3.28)
Dz Dnh ._
;;-# ,o.u\tz 4b\.
and at the upper surfac€ 1r/ = D4/Dt so that here we have
Dn Drl_., = =:J:2 tv . u\tn_ nb).DI Dt
Eliminatirg the divergence telm ftom the last tlvo equations gives
D 2-n\DDtl, not= n_;wt4-nrt,
Dl' nb\ D tz-nb\ ^ot\u*1-Dt\ ,' /-*This means that the ratio of the height of a fluid parc€l above the floor to the total depth ofthe column is fix€d; that is, the fluid st€tches udfo r y in a colunr\ and this is a kinematicprope(y of the shallow lrater system.

t291.2 Reduced Cravity Equations
','-It_h
Fig.3.3 The reduced gravity shallowwa
ter sYstem, An active layer lies over a
deep, more d€nse, quiescent laver. ln a
€ommon variation the upper surfac€ kheld flat bya risid lid, and 40 = 0.
and
3.1.5 Analogy with compressible flow
Th€ shallow water equations (3.8) and (3 14) are analogous to the compressible gas dt'namic
€quations in two dimensions, namelv
P! = !o"Dtp
a{+v.tupt=o,
along with an equation of state wtlch we tak€ to be p = f (.p) The mass conseffation
€quaiions (3.I4) and (3.30) are identical, with the replacement p - h lf p : Cpv' then {3 29)
D! = -L!!sp: 6ypt zsp.
(3.29)
{3.30)
(3.3r)
If y = 2 then the momentum equations (3 8) and (3.31i become equivalent' with p - h and
Cy - g. In an ideal gas y = cpl.! and vatues tlpicallv are in fact less than 2 (in air y = 7/5);
h;wev;r, if the €quations are linearized, then the analogv is exact for all values of y' for
lhen (1.31) bFcomes at ar - po-r.aVp' wherF I I dp dp and lhe linearized shallo$
wdrFr momentum cquar ion rs a lr /Al - -H ttgH'vh so that po - H and .a - 9H Ihc
sound waves of a compressible fluial are then analogous to shallo$'water waves' which are
considered in section 3.7
3.2 REDUCED CRAVITY EQUATIONS
Consider now a single shallow moMng laver of fluid on top of a deep, quiescent fluid layel
(Fig. 3.3), and beneath a fluid of negligible inertia- This configuration is often used as a
mo(lel of the upper ocean: the upper laver rcpreserts flow in perhaps the upper few hmdred
mehes of the ocean, the lower layer b€ing the near_stagnant abyss lf we turn the model
upside alown we have a perhaps slightly less iealistic mod€l of the atmosphere: the lower
Iayer represents motion in the trcposphere above lvhich lies an inactive stratosphere The
equations of motion are virtually the same in both cascs.

Chapter 3. Shallow Water Systems and lsentropi( Coordinates
3.2.1 Pressure gradient in the active layer
We will derive th€ equations for the oceanic case (active layer on top) in tlvo cases, whirhdiffer slightly in the assumption mad€ about th€ upper surfac€.
I Free upper surface
The pressur€ in the upp€r layer is given by inlegrating the hyahostatic equation down ftomI he upper suface. Thus, at a heighr z in rh€ upper ld)cr
pte) = Spt(no 2), (3.32)
wh€re 40 is the height of the upper surfac€. H€nc€, ev€rywhere in the upper layer,
130
*',, = -"'no,
DuDt+f/u= gvno.
In the lower Iayer the pressue is also giv€n by the weight of the fluid above it. Thus, at som€level z in the lower layer,
p2e) = pts\no nt) + pzs(h - z). (3.3s)
and the momentum equation is
(3.34)
(3.37J
(3.38)
(3.33)
But if this layer is motionless the hodzontal pressuie gradient in it is zero and therelore
ptsno- ps 4r -constant. r't.?6r
whete g' : g@2 - pt) I pt rs r}]'e reduced graviq,.'l}le momentum equation becom€s
?1 - r.. , - s'o,,,.Dt"The equations are compl€ted by the usual mass consewation equation,
ff+nv.z:0,where ,1 : no - 4r. Because 9 > g', (3.36) shows that surface displacements are muchsmdiier than th€ displacements at the interior interface. We see this in the real ocean wher€the mean intedor isopycnal displac€ments may be seveml tens of metres but vadations inthe mean height of ocean suface are of the order of cenrimetres.
II The rigid lid approximation
The smallness of the upper surface displacement suggests that we will mak€ little error iswe impose a rltid iid at the top of the fluid. Displac€ments ar€ no longer allowed, but the lidwill in g€n€ml impart a pressure force to the fluid. Suppose that this is P(r, /, f), th€n thehodzontal pressure gradient in th€ upper layer is simply
vpr = VP. (3.39)

3.3 Multi Layer Shallow Water Equations
The pressue in rhe lower layer is again given by hydrostasy, and is
p2= -hSn1+ pzg\nr - zJ +P = pgh p28(h+z)+P,
r3L
(3.40)
(3.4r)
(312)
(3.43)
13.44)
(3.4s)
and the momenrum equation for ihe upperlayer rsjusl
so that
Then if Vp2 = 0 we have
9pz = -Slpz pr)Vh + VP.
Sl?z-Pl)vh=9P'
D]+y"u=-sivn.
pt=plg(no-zJ,
whcre g' = g\p2 - pt) I p I . Thes€ €quations differ from the usual shallow water equationsonly in the us€ of a r€duc€d gravityr'in plac€ of I its€lf. lt is the densiay dr'frer€nce betrveenthe two layers that is important. Similarly, if we tale a shallow water system, with themoving layer on the bottom, and we suppose that overlying it is a stationary fluid of finit€density, then we would easily furd that the fluid equations for lhc moving layer are the sameas if the fluid on iop had zero ineltia, except that t would be replaced by an appmpriat€reduced gmvity (problem 3.1).
3.3 MULTI.LAYER SHALLOW WATER EQUATIONS
we now consider the d).namics of multiple layers of fluid stacked on top of each other.This is a crude representation of continuous statification, but it tums out to b€ a powerfulmodel of many geophysically interesting phenomena as well as being physically realizablein the laboratory, The prcssurc is continuous across the interface, but the density jumpsdiscontiruously and this allows the horizontal velocity to have a corresponding discontinuity.Thc set up is illustrated in Fig. 3.4.
In cach lay€I pressure is given by the hyabostatic approximatioq and so an)ryhere in theinterlorwe can ffnd the pressure by integrating dolvn from the top. Thus, at a height z int}le first layer we have
and in the second layer,
p2 = pfiho - 4t) + p?gh) - z) = plsno + hs\nr pzgz,
whete gi = g@2 - pt) lpr, and so on. The term involving z is irrelevant for the dynamics,because orily the horizontal de vative cnters the equation of motion. Omitting this tetur,for the nth layer the dFamlcal prcssure is given by the sum from the top do$'n:
P^=Pr ZStth'
where 9; =9(pi+r p)lh(bDrgo = g).The interface displacements may b€ expressedinterms of the layer thiclaresses by sumrling from the bottom up:
4^=4y+ \ ht
(3.46)
13.47)

132 Chapter 3. ShallowWater Systems and ls€ntropic Coordinat€s
Fig. 3.4 The multi-layer shal-low water system. The layersare number€d from the topdown. The coordinat€s of th€interfa.es are denoted by 4,and the layer thicknesses byh, so that hi = 4r - 4i r.
no
4r'n2
nF1,
4i
The momentum equation lor each layer may then be wdtten, in general,
where the pressure is given by (3.46) and in terms of the layer depths usinC (3.a8). If wemale the Boussinesq approximation then pn on the right-hand side of (3.48)is replaced by
Finally, the mass conservadon equation for each layer has the same form as the single-layer case, and is
D!*n"v,u.=o.
The two- and threeJayer cases
The two.layer model (Fig. 3,5) is the simplest model to captwe the effects of stratification.Evaluating the presswes ustng (3.46) and (3.47) we ffnd:
Du" - 1-i+J\uh= vpn,
Pt = Prgno = PP(111+ h2 + nb)p2 = p tts no + slntl = pt lg lh t + h2 + nb) + gihz + nb\1.
The momentum equations for the Evo layers arc then
Dr.'fi' - I zut =. gV no - .gvthr - h2 + nbt.
and in the bottom layer
Dff r 1*u, = fibvno + e\vn,)
: - Pj[ov tnt + n, + n) + siv (h2 + n,,l .
(3.48)
(3.49)
(3,51b)
(3,s0a)
(3.50b)
(3.51a)

3.3 Mukl-Layer Shallow Water Equations
z
Fig.3.5 The two.layer shallowwater system. A fluid ofdensity p, lies over a denserfluid of density pr. ln the.educed qravity case the lower layer may be arbitrarilythick and i5 ass!med stataonary and so has no horizontal pressLrre gradient. ln the'rigid lid' approximation the top surface displa<enent is negleded, but there is thena non-zero pressure sradient induced by the lid.
In the Boussinesq approximation prlp, is replaced by unity.In a thrce-layer model the dynamical prcssures are found to be
P1 = PPhp2 = pllgh + gi(hz + b + rtb)l
pr = pt Ish + gilhz + h3 + nb) + sih3 + nb,l,
where h = no = r,D + hr +hz+h a\d.gi= g\p3 pz)/pt.Morelay€rscanobviouslybeadded in a systematic fashion.
3.3.1 Reduced'gravity multi-layer€quationAs with a single active layer, we may envision multipl€ laycrs of fluid overlying a dceperstationary layer- This is a useful model of thc stratified upper ocean ove ying a nearlystationary and nearly unshatified abyss. hdeed se use such a modei to study the 'vcntilatedthermocline' in chapter 16 and a detailed treatment may be found there. If we supposcthere is a lid at the top, then thc rnodel is almost the same as that of the previous scction.However, now the horizontal pressure gradient in the lowest model layer is zero, and sowe may obtain th€ pressures m all the active layers by integrating the hydrostatic equationupwards from this layer. Suppose we have N moving layers, lhen th€ reader may verify thatth€ d),nami€ pressure in th€ rL th layer is given by
P^ : L Ptg,nt,
(3.s2a)
(3.52b)
(3.52c)
(3.s3)

134 Chapter 3. Shallowwater Systems and lsentropic Coordinates
Fiuid velocity, into page
Fis. 3.6 Geostrophic flow in a shallow water system, with a positive value of theCoriolis paramet€r /, as in the Northern Hemisphere. The pr€ssure force is directeddown the gradient ofthe height field, and this can be balanced by the Coiolis forceifthe fluid velocity is at right angles to it. lf/ were nesative, the geostrophic flow .
would be rcversed.
whereasbeforeg; =g(p,+r pj)/pr.Ifwehavealidatthetop,andtaketo=0,thentheinte ace displacements are related to th€ Iayer thicknesses by
\" = >ht. (3.s4)
Irom th€se er?ressions the momentum equation in each layer is easily constructed,
3.4 CEOSTROPHIC BALANCE AND THERMALWIND
Geostrophic balance occus in the shallow water equations, iust as in the continuouslystratified equations, wh€n the Rossby number U/fl is small and th€ Coriolis term domhatesthe advective t€Ims in the momentum equation, In the singte layer shallow water equationsthe geostrophic flow is:
fxus=-gVn. (3.ss)
Thus, the geostrophic velocity is proportional to the alope of the surface, as skerched inIig. 3.6. (For the rest of this s€ction, we will drop the subsc ptr, and rake.all velocities tobe geostrophic.)
h both the singlelayu and multi-lay€I cases, th€ slope of an intedacial suface is dtecrlyrelated to the aliffer€nce in pressure gradient on eithei side and so, by geostrophic balance,to the shear of the flow. This is the shalow water analoglle of the thermal wtud relation. Toobtain an expr€ssion for this, consider the inteface, ,, betw€en two laye$ Iabelled I arld 2,The prcssure in two layers is given by the hydrostatic relation and so,
h=A(x,y)-p\gzp2: A(x,y) p$4 + pzsln - zJ
= Alx,y) + prg'rn p2gz
(at some z in layer l)
(at som€ 2 in lay€I 2)
(3.56a)
(3.s6b)

3.5 Form Drag
i\p : pzg Lz
where A(x, y) is a function ofintesration. Thus we find
*'o, ,,t = n'''n'
ft, = lxxvp,.
Fig.3.7 Margules' relation: using hy'drostasy, the difference in the horlzontalpressure gradient b€tween the upperand the lower layer ie given by g'prr,where r = Iand = AzlA! is the interface slope and g' = \p, pt)lpt.ceostrophic balance then sives /(u, -,r) = 9'J, which is a special case of(3.60).
If the flow is gcostrophically balanced and Boussinesq then, ln each layer, the velocity obeys
f (u" u"-) = kxs;v4.Tbis is the thermal wind equation for the shallow water system. It applies at any interface,and it implies the slear rs proportional to the interface slope, a result known as the 'Margulesrclation' (Fig. 3.7).'?
Suppose that we repr€sent lhe atmosphere by two layers of fluid; a me dionally decreas-itrg temperature may ther bc represented by an intedace that slopcs upwards toward thepole- Then, in cither h€misphere, !,"e have
' ,, s.' Y o, , r.br,
and th€ t€mperature gradient js associated with a positive shear (se€ problem 3.2).
Using (3.57) thcn gives
or in general
/(r.rr r.rr r = k\siv4,
(3.s7)
(3.s8)
(3.s9)
(3.60)
].5 FORM DRAG
\lhen the hterface between two layers varies with position that is, when it is $,avy thelayers exert a prcssurc forcc on each other. Similarly, if the bottom of thc fluid is not flatthen the topography and the bottom layer will in general exert forces on each other. Thiskind of force is known as /onn drdt and it is an important mcans whcreby momentum canbe added to or cxtracted from a flow3 Consider a layer confin€d between two intedaces,4r (x,l) and 4r(,.,j',). Then over some zonal interval I the average zonal pressure for€con that fluid layer is giten by
an u, o'.ir: r, (3.62)

r36 Chapt€r 3. Shallow Water Systems and lsentropic Coordinates
Integrating by parts ffst in z and then in x, and noting that by hydrostasy ap lAz does nordep€nd on horizontal position within the layer, we obtain
'r= if, 4fl. an. an. An'dx = (ila; + n,i = +p j; p, r;, (3.63)l*4'":.
where pr is the pressue at 4r, and similarly for pr, and to obtain the second line ive suppos€that the integral is around a closed path, such as a cfcle of latitude, and the average isdenoted with an overbar. These tems represent the tmnsfer of momentum from one layerto the next, and at a particular intedace, ;, we may define the folm drag, Tr, by
an. ap,T,=lt,-=-n,- (3.64)
The form dmg is a str€ss and as the layer depth shrinks to z€ro its vertical d€fvative, aTlaz,is the force (per unit volume) on the fluid, FoIm dlag is a particularly important means forthe vertical transfer of mom€ntum and its ultimate removal in an €ddying fluid, and is one
of the main mechanisms whereby the wind sffess at the top of the ocean is cornmunicatedto th€ ocean bottom. At the fluid bottom the form drag is Ftt wher€ 4, is the bottomtopography, and this is propoflional to the momentum exchange with the solid Ea h. Thisis a significant mechanism for th€ ultimat€ removal of momentum in th€ ocean, especiallyin the Antarctic Circumpolar Culrent where it is likely to b€ much larger than bonom (or
Ekman) drag arising from small-scale turbulence and friction. In the two-layer, flat-bottomedcase the only folm drag occurrjng is that at the int€face, and the momentum transferbetween rhe larers is just p.ArnAx or -nta pjdi: then. the force on each Ia)€r due ro lheother is equal and opposite, as we would e).pect from mom€ntum consenation, (Form dragis discussed more in an oceanographic context in sections 14.6.3 and 16.6.2.)
For flows in geostrophic balance, the folm drag is related to the meddional heat flux.The pressure gradient and velocity are related by p/r' : ap'lax and the interfacialdisplacement is proportional to the temperatue perturbation, ,' lin fact one may show that
n . -b I'ablAzl.Thus -anp'rtax * u,. a.orresponden.e t}lar will rc ocrur$henheconsido the -Eliaisen PaIn fux in chapter 7.
3.6 CONSERVATION PROPERTIES OF SHALLOW WATER SYSTEMS
There are l!\o cornmon M)es of conservalion properly m tluds: {i, material in\arjanrs and
iii) integal invariants. Matedal invariance occurs wh€n a property (4 say) is conserved oneach fluid d€mmt, and so ob€ys th€ equation D+lDf : 0. An integral invariant is on€ that isconseNed followhg an integration over some, usually closed, volume; energy is an example.
3-6.1 Potential vo(icity: a material invariant
The vorticity of a fluid (considered at greater length in chapler 4), denoted ur, is d€fin€d tobe the curl of the velocity fidd. Let us also define the shallow water vorticity, ur* , as the curlof th€ hodzontal velocity. We therefore havel
sr=Vxl,, (tr*=Vx!r. (3.6s)

r'(o);i =;F(a) =0. 13.74)
since F is arbitrary there are an infilte number of materlal invariants corr€spondrng to
different choices of F.

63)
,t"J
not
:is
64)
az,for
red
hisib(or
Led
lerheag
idlat
0d
isile
3.6 Conservatron Propertre5 of Shallow Water System5 117
Recatse aulaz = Ax lAz = 0, only the v€rtical component of @* is non-zero and
-.-kr4 9'\=k(.\dx dy )
Using the vector identity
l{x.V)l,l- ;Vrr'lr)- . (Vxu\.
we w te the momentum equation, (3.8), as
a#*-.".= v(on,l",).
(3.66)
(3.67)
(3.68)
(3.69)
(3.70)
To obtain an evolution equation for the vorticity we take the curl of (3.68), and ma}€ use ofihe vector identity
Vx(@+xu) = (r. V)&r+ (uJ+. V) + @*V.x-xV . @*
= (u. V)oJ+ + oJ*V .u,
using the fact that V . @* is the divergence of a curl and th€rcfore z€ro, and lu* . V)lt = 0because @* is perpmdicular to the surface ir which & varies. Talqng the curl of (3.68) gives
a(- r {r.. V)< - -(V . .dt
where < : k . ur*. Now, the mass conser,'ation equation may be written as
and using this (3.70) becomes
which simpMies to
The important quantity </h, often denoted by Q, is kno$'n as the potential vorticity, aJ.d(3.73) is the potential vorticity equation. W€ r€-derive this conservation law in a more g€neralnlay in section 4.6
Because Q is conserved on parcels, then so is any function of Q; that is, F(Q) is a
material invariant, where F is any function. To see this algebraically, multiply (3.73) byf'(Qr, rhe derivari\e ol I wirh respecl ro Q, Fving
(DhLv u=;w,
D( <DhDt - nDt'
9/5\=oDt \h/
(3.71)
13.72)
(3.73)
l!

Effects of rotation
In a rotatjng frame of rcference, the shallow water momentum €quation is
Du-r't+Itu= gv4,
,=!^<ao=J^onae,
tkorem, it may b€ \TitteD asDC - D- J,, . ar.DI DIJ
' (3.7s)
where (as before) / = /k This may be w tten in vector invaliant form as
a - _/ I ,\;; +((lJ- rJ'.u- v\sn! 2u ).
and taldng the curl of this gives the vorticity equation
"ai atu.vtte -It= tI+ttv u. tJ-77')
This is the same as the shallow water vorticity equation in a non_lotating fram€, save that 6is replaced by 6 + /, the reason lor this being that / is the vorticitv that the fluid has by
vhtue of the background rotation. Thus, (3:77) is simply tle equation of motion for the total
or absolute vorticity, &r" = a* + .f = le + f)k.The potential vo icity equation in the rotating case follows, much as in th€ non-rotating
case, by combining (3.77) with the mass conservation equatron, grving
-q(#)=.
(3.76)
(3.79)
{3.82)
(3.78)
That is, Q = (< + /)/h, the potential vorticity in a rotating shallow system' is a material
invariant.
Vo ni city a n d ci rcul ation
Although vorticity its€lf is not a material invariant, its integal over a horizontal matedal
area is invariant, To demonstate this in the non-rotating case, consider the integral
over a surface A, the cross_sectional area of a cohmn of height h (as in lig 3:2) Taking the
matedal derivative of this glves
ff:J ffrar*J o-loaer.
99=9 [ rao = o.Df DtJr-
(3.80)
The fust teIm is zero, by (3.72); the second telm is just the derivative of the volune of a
column of fluid and it too is zero, by mass consewation. Thus,
{3.81)
Thus, the integral of the voticity over a some crcss_sectional area of the fluid is unchanging'
although both the vorticity and area of the fluid mav individualy change. Using Stokes'
r38 Chapter 3. ShallowWater Systems and lsentropic Coordinates

3.6 Conservation Properties of Shallow Wat€r Systems
where th€ line integral is around the boundary of A. This is an example of Kelvin's circulationtheorem, which we shall me€t again in a more general form in chapter 4, where we alsoconsidu the rotating case.
A slight generalization of (3.8r) is possibl€. Consider the integral J = J F(Q)h d?4 whereagain F is any ditrerentiable function of its argumen(- It is clear thal
-qJ.tor,'oo=0.(3.83)
r39
IJ the area of integration in (3.68) or (3.83) is the whole domain (enclosed by frictlonlesswalls, for example) then it is clear that the intcgral of ,f(Q) is a constant, including as aspecjal casc rhc intcgral ol <.
3.6.2 Energy conservation: an lnteqral invarlantSincc we have made various simplifications in deriving the shallow wat€r system, ir is notself-evident that energy should be conse cd, or indeed what folm the energy rakcs. Thekinelic €nergy density iKE), that is the kinetic €ncrgy per unit area, is porrt?/2. The pot€ntialenergy dcnsity of th€ fluid is
ez= [' ooo,a, = loosn'.
ff*v.r=0,
(3.84)
The factor p0 appears in both kinetic and potential energi€s and, because it is a constant, wewill omit it. For algebraic simplicity we also assume the bottom is flat, at z = 0.
Using the mass conservation equation {3.r5) we obtain an equation for the evolution ofPotential energy dcnsity, namely
ft{*on'v.u=o
*'4., ("+)t+, "=,From the momentum and mass continuity equations we obtain an equation for the evolutionof kinedc energy density, namely
D hi u2h hta-z
a hr2 I h,\ h,dr z-tv \u 2 ) su v2 \)
Addins (3.8sb) and (3.86b) we obtajn
Sl @"' * en') * v ll"@n'*n'*sn')l
(3.85a)
(3.8sb)
(3.86a)
(3.86b)
(3.87)
(3.88)
:0,

140 Chapter 3. Shallow Water Systems and lsentropic Coordinates
wherct=KE+?E= (htt2 + ghz)l2lsrhe density of the total eneigy ?nd F = ttlhuz +gh2 + gh2) 12is r}le energy flrlx. If the fluid is confined to a domain bound€d by rigid wals,on which the nolmal component of velocity vanishes, then on integating (3.87) over thataiea and using Gauss's theorem, the total energy is se€n to be conserved; that is
ai ra l thuz+ah2\da:o.dt 2dt Ja(3.89)
(3.91)
(3.94)
(3.90a)
(3.90b)
Such an energy principle also holds in the case with bottom topogaphy. Note that, as w€
found in the case for a compressible fluid in chapter 2, the en€rgv llu,.( in (3.88) is not just
the en€rgy density multiplied by the velocity; it contains an additional tetlr:. guh2 12, and
this represents the en€ryy transfer occurdng when the fllrid do€s work against the pressue
force (see problem 3.3).
3.7 SHALLOW WATER WAVES
Let us now Iook at the gravity waves that occur in shallow water. To isolate the essenc€ ofthe phenomena, we \4'ill consider waves in a single fluid layer, with a flat bottom and a ftee
upp€I surface, in which gravity provides the sole restorurg force.
3.7.1 Non{otating shallow water waves
civen a flat bottom the fluid thickness is equal to the free surface displacement (lig. 3.1),
and we let
h(x, Y,t) : H + h' lx,Y,t) = H + 4' \x'Y't)'utx, y,l t - u tx.y.It.
The mass conse ation equation, (3.15), then becomes
4.1' -," , n''o. -u .v4 =0,at
and n€glecting squares of small quantities this ).r€lds the lin€ar equation
d,t. , ,, . r. o.at'""Similarly, linearizing the momentum equation, (3.8) with / = 0, yields
Au'i = -sv tt . (3.93)
Eliminating velocity by differentiating (3.92) with respect to time and taking the diver'gence of (3.93) Ieads to a# oav'n' = o,
. (3.S2)
which may be recogEized as a wave equation. w€ can find the dispersion relatronship forthis by substituting the trial solution
4/ = Re ier(ft '-dt, (3.9s)

t4t
wher€ i is a complex constant, t = ik +jl is the horizontal wavenumber and Re indicatesthat the real pa of the solution should be tal(en. Il for simplicity, we restrict attennon tothe one dimensional problem, with no va ation in the jv-direction, then substituting into(3.94) leads to the dispersion relationship
3.7 Shallow Water Waves
(3.96)
where c = .]3F; that is, th€ wave spe€d is proportional to the square root of the mean fluiddepth and is independent of the wavenumber - the waves arc dispersior ess. The gcneral
solution is a superposition of all such waves, wlth the amplitudes of each wave (or lou ercomponen0 being derermined by the Fouier decomposition of the lnitial conditions.
Because the waves are dispersionless, th€ general solution canbe written as
where F(r) is the height field at f = 0. lrom this, it is easy to s€e that th€ shape of an initialahsturbance is preserved as it propagates both to the dght and to the left at speed c, (se€
also problem 3.7).
3.7.2 Rotating shallow wat€r (Poincar6) wav€s
We now consider the effects of rotation on shallow water waves, Linearizing the rotating,flat-bottomed /-plane shallow water equations li.e., (Sw.1) and (Sw.2) on page 1271 about a
stale of r€st we obtain
n'\x,t) = ;EG cl) + F(x + ct)l ,
u:,: - ,"n - nu* u{ , no -nuuo". + , ,(# ,
We non-dimensionalize thes€ equations by writing
(x,y) = L(i,i), tu',u')=u6,i), t = Hi,
and (3.98)becomes
dlt , - ^, dnar -- dx
(3.97)
(3.99)
dy I(3.98a,b,c)
ai .- ^ ^-ai ah laa at\-+ln =-c'-, -:+l-+-lat " dy at \ax oJl
/ ia -r. r,z[\ rfirlrn -ii i.'rllal=0.\ ik | -i6) \nt
= 0. (3.100a,b,c)
where a = n?E/ U is the non-dimensional speed of non-rotating shallow watcr waves. (It is
also the inverse ot rhe Froude number U /\,tF., To obldn a dispersion relationshjp \^e lel
(3.r0r)
wfrere 0 = [i + i ana A ls the non.alimensional frequency, and substilute into (3.100), giving
(i,i,i) = (a,t,D€'1[ t 6i),
(3.102)

142 Chaprer 3. ShallowWater Systems and lsentropic Cootdinates
Fig.3.a Dispersion relationfor Poincar6 waves (solid) andnon-rotating shallo\{ waterwaves (dashed). Fr€quencyis scaled by the Coriolis frequencv f, and wavenumberby the inve6e deformation ra-
dius JsHlf. For smallwav€numbe6 the frequency is ap'proximat€ly /ifor hiqh wave-numbers it asymptotes to thatof non-rotating waves.
^3
-t 0 I
wavenumber (k x ld)
This homogeneous equation has non-tdvial solutions orily if the d€terminant of the matrixvanish€s. This condition giv€s
6@2 _ j3 t'R' = o. (3.103)
@2=f&+gH(k?+Lz)
wtrereR,=l'?+i'zrtrereare$4'oclassesofsolutionto(3.103).Thetustissimply6:0,ie.time inalep€nd€nt flow coresponding to geostrophic balance in (3 98) (Because geostrophic
balance gives a divergence-free velocity field for a constant Coriolis pammeter the equations
are satisfied by a time independent solution.) The second set of solulions satisfies the
disD€rsion relationA/ ji - i,'k I il t, rr.r o4i
whi.h in dimensional folm is
(3.10s)
Th€ corresponding waves are knolvn as Poinca,'d waves,a and the dispersion relationship is
illustrated in lig. 3.8. Note that the frequ€ncy is always greater than the Co olis ftequency
/0. There are two interesting limits.
(i) The short wave linit.If*'-#' (3.106)
where f, = k2 + r'?, then the dispersion relationship reduces to that of the non_rotating
case (3.96). This conairtion is equivalent to requirjng that the wavelength be much
shofier than the deform ation radius, Ld = 17h.lf. Specifica]ly, if I : 0 and l = 2nltis the wavelength, the condition is
A2 << Lien)z (3.107)

The nume cal factor of (2rr)'? is more than an order of magnitude, so care must betak€n when deciding if the condition is satisfied in particular cases. Futhermore, thehavelength musr still be longer thar the depth of the fluid, othenvise the shallow watcrcondition is not mct.
(ii) The lonq wave linit. r, .,K/ '9 . rr.ro8r
that js if the wavelength is much longer than the delomation radius I/, then th€dispersion r€lationship is
3.7 ShallowWater Waves
Au AnE=-sa,' r"" = qa!. 4 *oY =o.ol 0L ax
143
(3.r09)
'I hcsl dr( I nuM dr inpl' ial o\.illation\. Ihc cquations ol morion gi\ ing risF Io rhem are
!-t*':0, ff * fou' :0, (3.1i0)
which are €quival€nt to material equations for free particles in a rotating fram€, uncon'straincd by prcssurc forres, namely
d'7x -ar, t'u
See also problem 3.9.
d2v=ir, ?;i+J'u=o. (l.r r r)
3.7.3 Kelvin waves
The Kelvin wav€ is a particular F/pe of gravity wave that exists in the presence of bothrotation and a laleral boundary. Suppose thcrc is a solidboundary at / : 0; clearly harmonicsolutions in the j/-directlon ar€ not allowable. as these would not satisfy the condition of nonormal flow at the boundary. Do any wave like solutions exist? The afffmative answer tothis question was provided by Kelvin and thc associated waves arc now eponlnously knor\.nas (elvin wdves.s We begin with the linearized shallow water €quations, nam€ly
au dn da " dn ao ../"u au\ -ol Jou - s ax' at to' n ar' at H \a, ay )- o'
(3.112a,b,c)
The fact that r' : 0 at y :0 suggcsts that r{c look for a solution with r' : 0 cvcrtrvhcre,r\'hence th€se equations becom€
Equations (3.r13a) and (3.113c)lead to the standard wave cquation
A2u' , A2u'at (
ax/
(3.1r3a,b,c)
(3.rr4)
$here c : /gH, th€ usual wave speed of shallow water waves. Thc solution of (3.114) is
u' = Ft\x + cL, yl + Fz\x - ct, yl, (3.115)

144 Chapter 3. Shallow Wat€r Systems and ls€ntropic Coordinates
r4aith conespondlng surface alisplacement
with solutions
n' -,18 I s [-Flx + ct, y) + Fzlx - ct, yr].
u'=etlLdG@-ct)t x,' = O,
n' -- ,,lEDe vll'G(x - ct)
(3.116)
The solution represents the superposltlon of two waves, one (Fl) travelling in the negativer-clhection, and the other in the positive r-direction. To obtaln the / dependerce of thesefunctions we use (3.113b) which giv€s
1FL .k _ iFz fo -ay .Jgt7 ay \1911
(3.117)
(3.118)h = F(x + ct\ertLd F2 = G(x cue-rtLn,
where ld : vE;I/JFo is the radius oI deformation, The solution Fr grows exponentially awayfrom the wall, and so fails to satisfy the condition of boundedness at intrity. lt thus mustbe rliminated, leaving tbe geneml solution
(3.1r9)
Th$e are Kelirln waves, and they decay e8)onendally away from the boundary. If f0 ispositive, as in the Northern Hemisphere, th€ boundary is to the right of an observet movturgwlth the wave. Given a constant Coriolis palameter, we could equaly well have obtained asolution on a meddional wall, itr which case we would find that the wave again moves suchthat the wall ls to the right of the wave dfection. (This is obltous once it is reatized that/-plane d),namics are isotropic in x and Jr'.) Thus, in the Northem Hernisphere the wavemoves anticlockwise rcund a basin, and conve$ely in the Southem Henisphere, ald in bothhemispheres the dtection is cyclonic.
3.8 GEOSTROPHTC ADJUSTMENT
We noted in chapter 2 that the large-scale, extratropical circulation of the a@osphereis in near-geostrophic balance. Why is this? Why should the Rossby number be small?tuguably, the magnitude of the velocity in the aunosphere and ocean is rtrlhately given bythe sEengrh of the forcinS, and so ultimately by the diferentlal heating between pole andequator (although even thls argument b not satisfactory, since the forcing mairily deteminesthe energy throughput, not drectly the energy ltse]J, and the forcing ts ltselJ d€pendenton the atmospherc's response). But even supposing that the velocity magnltudes are glven,there is no a pdori guaranrce thal the forcing or the dynamics will produce length scalesthat arc such that the Rossby number is small. However, there is in fact a powerful andubiquitous process whereby a fluid in an initially unbalanced state ftturally evolves towarda state of geostrophic balance, namely ,eostlophic a4irstmen! This process occurs quitegenenlly in rotating fluids, whether stmtiffed or not. To pose the problem in a simple folmwe will consider the free evolution of a single shallow layer of fluid whose initial state ismadfesdy unbalanced, and we will suppose that suiface displacemelts ale small so that ttre

3.8 Ceostrophic Adjustment 145
cvolution ofthc system is described by the linearized shallo$' equations ofmotion. These
au ,i+J/u= g\/tl, a]+av u:0, (3.r20a,b)
(3.r26)
wh€re t is the free surface displacement and ,q is the mean fluid d€pth, and we omit theprimes on the lin€arized variables.
3.8.1 Non rotating flow
We considerfust the non-rotating problem set, Mthlitleloss of genemtity, in onc dimension.we suppose that inilially the fluid is at rest but with a simple discontinuity in the height
and u().,t = 0) = 0 everywher€. We can realize these initial conditions physically byseparating two fluid masses of differeni depths by a thin dividing wall, and then quicklyremoving the wall. What is the subsequent cvolution of the fluid? The general solution Iothe linear problem is givenby (3.97) where the functional form ls determin€d by the initialconditions so that her€
F(x) = 4(x,t = 0) = 40sgn(x). (3.122)
Equation (3.S7) stat€s that this initial pattern is propagated to thc right and to the left.lhdr i\.lho di!(onrinuiries in fluid heighl move Io lhc righl and lell al a speed. \&F.Specificaly, the solution is
l+n, x<o4(x,t=0)=1
L 4o )'>u(3.r2r)
4(x,t) = ;4olscn(r+ct)+sgn(r ct)1. (3.123)
Thc initial conditions may be much more complex than a simpl€ ftont, but, because thewaves are dispersioil€ss, the solution is still simply a sum of the translation of those initialconditions to th€ right and to the l€ft at speed.. Th€ velocity field in this class ofprobl€m
which siv€s, usins (3.97),
au. Ani = s a"'
u = +lF\x + ct) - F(x - ct)1.
(3.r24)
(3.r25)
Conslder the case with initial conditions given by (3.121). At a given location, away fromthe initial disturbance, the fluid remains at rest and undisturbed unll the ftont arrives. Afterthe front has passed, the fluid surface is again undisturbed and the velocity is uniform andnon z€ro. Sp€cifically:
- f-lo"gn,*,,,_ lu
lo t"t':1''o''" lxl
The solution wilh 'top-haf initial conditions in the h€ight lield, and zero initial velocity,is a superposition two discontinuities similar to (3.126) and is illustmted in Fig. 3.9. Twofronts propagate in either direction from each discontinuity and, in this case, the finalvelocity, as well as the fluid displacement, is zero aft€r all the ftonts have passed. That is,the disturbance is radiated compl€tely away,

146 Chapter 3. ShallowWater Systems and lsentropic Coordinates
Pefturbation heightt=0
\Tt /
t=2
0
af * u.oA: o, \3.127)
(3.128)
This equation may be obtained either from the linearized velocity and mass conservationequations, (3.120), or ftom (3.127) directly. h the latter case, we write
a=T* "jre*r.r (r-fi) " i(^., k+) = r;. +
Fig. 3,9 The time development of an initial 'top hat' height disturbance, with z€roinitial velocity, in non rotating flow. Fronts propagate in both directions, and thevelocity is non-zero between fronts, but ultimatelythe velocityand height distubanceare radiated away to infnity.
3.8.2 Rotating flow
Rotation makes a profound difference to the adjustment problem of the shallow watersystem, because a steady, adjustcd, solution can exist with non-zero gladients in the heightfield the associated pressure gradients being balanced by the Coriolis force - andpotential voticity conservation provides a powerful consEaint on the fluid €volution,o Lr a
rotating shalow fluid that cons€ ation is repres€nted by
where Q = (< + /)/h. ln the linear case with constant Coriolis parameter, (3.127) becomes
a#=", ,=(< n*).
(3.129)
having used /o > l<l and H > lt . The term /0/H is a constant and so dtnamicallynimnortant, as is the Il t factor multiplying 4. Further, the advective telm r . VQ
becomes l,.V4, and this is second order in perturb€d quantities and so is neglect€d. Thus,making these approximations, (3.127) reduces to (3.128). The potential vorticity field istherefore fixed in space! Of cours€, this was also tm€ in the non rotating case where thefluid is initially at rest- Th€n a : < = 0 and th€ fluid rcmains inotational throughoutthe subsequent evolution of the flow. However, this is rather a weak constraint on thesubsequent evolution of the fluidt it does nothing, for example, to prevent the conversion
0

3.8 Ceosrophic Adjustment 147
of all the potcntial energy to kinetic energy. In the rotating case the pot€ntial vorticity isnon-zero, and potential vorticity conservation and geostrophic balance are all w€ need toinfer the final steady state, assuming it exisls, without solving for the details of the flow€volution, as we now sce.
With an initial condition for the h€ight fi€ld given by (3.121), the initial potential vorticityis giv€n by
-J
Il
rterghtrnd
l'1a
ishe
heon
. | - fonntu x <oatx lt=l fonulH x>0,
(3.r30)
(3.131a,b,c)
(3.133)
(3.r34)
(3.rrs)
and this remains unchangcd throughout th€ adjustment process. The final steady state isthen the solution of the equations
a - kft - a,*,tt, t^" - -n31, h, - sa*.
wherc<=A1)lax-A lay. Because the Coriolis parameter is constant, the velocity ficldis horizontally non-divergent and we may define a streamfunclion {, = t4l/0. Equations(3.131) then reduce to
(''-fi)*=',",,', (3.r32)
where l,j = \'?E//0 is known as the Ross}/ rddru s of defonnation or often just the 'deformation radius' or the 'Rossby radius'. It is a naturally occuning length scale in probl€msinvolving both rotation and gxavity, and arises in a slightly diff€rcnt form in stratiffed lluids.
The initial conditions (3.130) admit of a nice analytic solution, for the flow will rcmainuniform inJl/, and (3.132) reduces to
-.;)
28)
29)
We solvc this scpantely for x > 0 and x < 0 and then match the solutions and their firstderivatives at r = 0, also imposing the condition that the streamfunction dccays to zerc as
,a - t@. The solution is
['Bqoliottl-e't"t x>oq - l+rsao71or,: -c'", y <0.
The velocity field associated with ttns is obtained from (3.13lb,c), and is
u=O, "= ffi.-",,.Th€ vclocity is perycndicular to lh€ slope of the free suface, and a j€t foms along the initialdiscontinuity, as illustrated in Fig. 3-10.
The important point of this problem is that th€ variations in the height and field arenot mdiated away to infinity, as in the non-rotating problem. Rather, potential vorticirycons€rvation constrains the inlluence of the adjustment to withln a defomratioD radius (we
see now why this name is appropiatc) of thc initial disturbance. This property is a generalone in g€ostrophic adjustment - it also arises if the inilial condition consists ofa velocityjump, as considered in problem 3.12.

148 Chapter 3. Shallow Water Systems and lsentropic Coordinates
'6
€-1
_!p
0
.!'-E
-ou9
I
.$r!o5.r
-2 0
x lLa
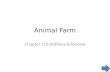
Fig. 3.t0 Solutions of a ljn€ar geostrophic adjustment problem. Top panet: theinitial height field, given by (3.12l) with 40 : 1 Second panel: equilibrium (finat)heishtfield, 4 given by(3.134) and q : fa| l g-Thnd panel: equilib um geostrophicvelocity (normal to the gradi€nt of height feld), given by (3.t3s). Bottom panet:potential vonicity, qiven by(3.130), and this does note evolve. The disrance, xis non dimensionalized by the defor.nation radius rd = a&F//o, and the velocitvby 40@ lfaLd). changes to the initial stat€ occur only within o(Id) of th€ initiatdiscontinuity; and as r - ao the initial state is unaltered.
3.8.3 * Energetics of adjustment
How much of ttre initial potential energy of the flow is lost to infinity by gravity waveradiation, and how much is converted to kinetic en€rgy? The linear equations (3.120) Iead to
|fttuu' * sa'1 * sIrY 1ur1 = x'
so that energy conseruation holds in the form
(3.136)
E= !J@u't sn\d,, d-E
dt =0' (3.r37)
Fovided Ore irt€glal of the divergence telm vanishes, as it normally witl in a closed domain.The fluid has a non-zero potentiaf energy, ( I / 2 ) J: ,r42 dr, if there arc variations in fluid

1.8 Ceostrophic adjustment
height, and witll the initial conditions (3 121) the imtial potential energy is
t49
Ph = (3.138)
PEF = 1r ci.,)'a']. (3.139)
12u 'rr" .-2,r1"14.,s = s-g4gr.. (3.140)
rr"- lu I u,ax - uls-'!^ 1 I ".'" a, -' 2 J \JLal )0(J.141)
[l 'rao'This is nominatly inffnite if th€ fluid has no boundaries, and the imtial potential €nergv
density is ,11612 everlHhere.In the non rotating case, anal with initial conditions (3 121)' after the front has passed'
the pot€ntial energy density is zero and the kinetic €nergy density is I11r2 / 2 = g nt lZ' usi"g(3.126) and d'? = 9H. Thus, all the potendal energy is locally converted to kinetic energv as
th€ front passes, and €ventually the kinetic energy is distributed uniforrr[y along the line.
In the case illustrated in lig. 3.9, the potential energy and kinetic energy are both ndiatedaway from the initiat disturbance. (Note that althowh we can superpose the solutions ftomdiff€rent initial conditions, we carmot superpose their potential and kin€tic energies.) The
gmeral point is that the evolution of the disturbance is not conlined to its initial location.
In contrast, in the rotating cas€ th€ conversion ftom potential to kinetic energy a largetconfined to within a deformation radius of the initial disturbance, and allocations far fromthe inilial disturbanc€ th€ inilial state is €ssentially unaltered. The conservation of potential
rcrticity has prevented the complete conversion of potential en€rgv to kinetic energv' a
result that is not sensitive to the precise form of the initial conditions (see also problem
3.r0).In fact, in the rotatiru case, some of the initial potential energy is converted to kinetic
€nergy, some ftmains as potential energy and some is lost to infinity; let us calculate th€se
amounts. The final potential energy, after adjustment, is, using (3 134)'
This is nominally infinite, but the change in potential energv is finite and is given by
]r'a fij (' " -"'1' a" * J'-
PEt-PEF=sqBI'
The initial kinetic energy is zcro, because the fluid is at rcst, and its fiinal value is' using(3.135),
snBLo
Thus one-third of the difference b€twe€n the initial and final pot€ntial energies is converted
to khetic €nergy, and this is trapped within a distance of the order of a deformation radius
of the disturbance; the remainder, an amount gld l]6 is radiated away and lost to infinity. In
ant ffnite region surrounding the initial aliscontinurty the final energy is less than the initial€nergy.
3J,4 ' General initial conditions
B€rause of the lincarity of the (linear) adjustment problem a spectral viewpoint is useful, inriich the fielals are represented as the sum or integtal of non'interacting lo]flifl modes. Ior

150 Chapter 3. Shatlow water Systems and lsentropic Coordinates
exampl€, suppose that the height field of the initial distu$ance is a two_dimensional field
(3.14s)
given by
n(o) = lJ iu(o)ei(t'{') d&dl (3.142)
where the Foufier coefncients flr,r (0) are given, and the initial velocity field is zero Then the
initial (and final) potential voticity field is given by
u = -f; .l.lio,,<ot t'*u" ul"or. (3.143)
To obtain an expression for the final height and velocity fields, we express the potentialvorticiw field as' f-s- Jd dkdt r,.l44)
The potenual vo rcity fi€ld does not evolve, and it is r€lat€d to the initial height field by
fu,1= ffin*do).
In the final,field by
geosuophically batanced state, the potential vo{rcity is related to the height
. (3.146a.b)
where K2 = k'z+ r'z. Using (3.145) and (3.146), the Fouder compon€nts of the qnal heightfield satisfy
a-, faq=::v-n_:n ano ar,= (,ftx, - t;)ir.,,
( 7*' r;) nr,, = -r;r,.,,'t
^ ffrr(0)n,.,=E,tri.
n - lJr.,,",'*,,' arai - lJ D^
*!;1"",''- arar.
q = lJ 0-,, ei(r"') dkd t = J! rl4pffff2 auat
(3.r47)
(3.r48)
lx physical space the final height field is just the spectml integxal of this, namely
(3.r49)
we see that at large scales (f'zIe << 1) 4u is almost unchanged from its iniual state; thevelocity field, which is then det€rmined by geostrophic balance, thus adusts to the pre-
existing height field. At large scales most of the energy in geostrophicallv balanced flowis potential ene€yi thus, it is €nergetically easier for the velocity to change to come intobalanc€ with tle height field than vice versa. At small scales, however, the final height fieldbas much le(s variability ttan il did initially.
Conversely, at small scales the height field adjusts to the velocity fi€ld. To see this, letus suppose that the initial conditions contain vorticity but have zero height displacement.Specifically, if the iniual vorticity is V'zVJ(0), where q/(0) is the initial strearifunction, thenit is straightforward to show that th€ final streamfunction is given by
(3.1s0)

l2)
3.8 Ceostrophic Adjustment l5l
The final height fi€ld is then obtain€d ftom this, via geostrophic balance, by 4 = Ofo /9 ) q.,.
Evidently, for small scales K2t, > 1) the sueamfunction, and hence the vortical componentof the velocity field, arc alnost unaltered from their initial values. On the other hand, atlarge scales the final streamfunction has much less variability thar it does initially, and sothe height field will be largely govemed by whatev€r variatlon it (and not the velocity field)had initially. In general, the final state is a superposition of the states grven by (3.149) and(3.150). The divergent component of the initial velocity field does not affect the final stalebecause it has no potential vorticity, and so all of the associated energy is eventually lost toinfinity.
Fhally, we remark that just as in the pioblem with a discontinuous initial height profil€,the change in total energy during adjustment is negative - this can be seen from the formofthe integals above, although we leave the specifics as a probl€m to th€ reader. That is,some of the iritial potential and kinetic en€rgy is lost to inffnity, but some is trapped by thePolendal voriicity constraint.
3.8.5 A vaJiational persp€ctlve
In the non-rctating problem, all of the initial potential energy is eventually radiated awayto inJinity. ln the rotating problem, the final stare contains both potential and kineticenergy. why is the energy not all radiated away to infinity? It is because potcntial vorticityconservation on parcels prevents all of the energy bcing dispersed. This suggests that it mayb€ informative to thinl of the geostrophic adjustment ploblem as a varidtional ptoblem:r^.'e seek to minimize the energy consistent with the conservation of potential vorticity. We
stay in the lin€ar approximation in which, because the advection of potendal vorticity isneglected, potential vorticity remains constant at cach point.
The energy of the flow is given by thc sum of potential and kinetic energies, namely
.3t
ral
.t)
5)
ht
In@' + sa'') an,
b)
n
e
I
eneryy =
(nh€re d-4 = dx dy) and the potential vorticity field is
(3.1s1)
a=t-kff=o.-.s f"fi, (3.rs2)
(3.rs3)
nhere the subscripts x,]y denote derivatives. Thc problem is then to extr€mize the energy$bject to pot€ntial vordcity conservatiorl This is a constrained problem rn the calculus ofEriations, sometimes call€d an isop€nmetric problem because of its origins in ma,yimizingihe area of a sudace for a given perimetei,T The mathematical problem is to extremize theiDteglal
r-!ln@'*,'),on' + Alx,y)[11)" - uy) fonlHll M,
siere ,\ (x, J', ) is a tagrange multiplier, undetern ned at this stage. It is a function of space:
il it were a constant, the integral would mercly exEemize en€ryy subject to a given int€gralof potential vorticity, and rearrangements of potential vorticity {which hcre we wish todisallow) would leave the integral unaltered.
a. rh.ra ?ro ih.pp indehanrlanr w"ri,hlp. rhara,ra rhrea Fnl.r-I .hrhdp .nnrfinna rh*

152 Chapter 3. Shallow Water Systems and lsentropic Coordinates
must be solved in order to minimize J. These arc
aL aaL aaLan ax an, ay an" -'
_aaL_aaL_^ aL_aaL aaLax Au, ay du" "' Au ax aux Ay Av,
-alaltgn-AI^=4, zu-)v 0, zu ay-O,and then eliminating l gives the simple relationships
s an
(3.1s4)ALa- :0,
wher€ I is the integrand on the dght hand side of (3.153). Substituting the expression for Iinto (3.154) gives, after a litde algebra,
(3.1s6)
(3.1ss)
(3.1s7)
fooy'which are the €quations of geostrophic balance. Thus, in the linear apprcximati oI', geostrophicbalance is the minimum energy state for a given field of potential vofticity.
3.9 ISENTROPICCOORDINATE5
We now return to the continuously stratified primitive equations, and consid€r the use ofpotential density as a vertical coordilrate, In pmctice this means using potential temperaturein the atmospher€ and (for simple equations of state) buoyancy ir rh€ ocean; such coordinaresystems are generically ca\ed isentropic coordinates, and sometimes iso/ycnal coorilinatesif density iB us€d. This may seem an odd thing to do but for adiabatic flov,' the res! tingequations of motion hav€ an attractive form that aids the interpretation of large,scale flowTh€ themod''namic equaoon becomes a statement for the conservation of the mass of fluidv{ith a given value of potential density and, because the flow of both the atmosphere and theocean is largely along isentropic surfaces, the momentum and vorticity equations have aquasi-two-dimensional f orm.
The particular choice of vertical coordinate is detemined by the form of the ihemo,d)'namic equation in the equation-set at hard; thus, if the thermod).namic equation isDdlDf = O, we traisform the equations from (r,JL7,z) coodinates to (x,Jr', d) coordinar€s.The material derivativ€ in this coordinate system is
D A /a\ /a\ DeA A
a- at-u\a*lu '\a"[ r' ae- at u Vr, 6$,
where the last term on the dght'hand side is zero for adiabaric flow.
3.9.1 A hyd.ostatic Boussinesq fluidIn the simple Boussinesq equations (see the table on page 72) the buoyancy is the relevantth€modynamic variable. With hydrostatic balance the horizontal and vertical momentum€quations are, in height coordinates,
D1tD'
+fxu=-v4, O= u4,(3.1s8)

3.9 lsentropic Coordinates t53
where b is the buoyancy, the variable analogous to the potential temperatue 0 of an ideatgas. The thermod),namic equation is
Db.Dt -'
605T6D6T5al-e=i rT=7+ -=-oMt
(3.1s9)
and because , = -gdp/po, isenftopic coordinates are the same as isopycnal coordinates.using {2,142) the horizontal pressur€ gradient may b€ transformed to isentropic coordi-
/aC\ _ tdo\ taz\ aC. faO\ 6(ar\ (aM\\ax/,- \axlb \ax/baz - \ax/b "\ax/b- \ax,/b'
M=O zb.
Thus, the horizontal momentum equation becomes
#+Jxr=-vbM.where the material derivative is given by (3.157), with b replacing 0. UsinC (3.f6r) thehyfu ostatic equation becomes
AMah- ''
The mass continuity equation may be dedved by noting that for a Boussinesq fluid th€mass element may be written as
A26m = po-fr8b 5x 6y.
The mass continuity equation, DamlDt = 0, becomes
D az az*i *
avot '' = o'
whereV3r,=Vb t, + a r / a, is the thee'dimensional derivative of the velocity ln isentropiccoordinates. Equation (3.165) may thus be wfitten
Do ab
- + OVh .u = (t-t
(3.160)
(3.t6r)
where o = azlab is a measure of the thickness beMeen two isentropic sudaces and thematerial derivative is given by (3.157) with d replaced by r. &uations {3.162), (3.163)
and (3.166) compdse a closed set, $.ith dependent vadables r., M and z in the space ofiDdependent variables x, / and D.
3.9.2 A hydrostalic ideal gas
Dedving th€ equations of motion for this system requires a littl€ more work than in theBoussin€sq case but the idea is the same. For an ideal gas in hydrostatic balance we hav€,usinc (r.Ir2),
(3.r62)
(3.163)
(3.164)
(3,16s)
(3.r66)
(3.r67)

Chapter 3. shallow Water Systems and lsentropic Coordinates154
where M = cp T + O is the 'Montgomery potentiat', equal to the dry static eneryy. (We usesome of the same slmbols as in the Boussinesq case to facilitate comparison, but tlreirmeanings are slighdy diff€rent.) hom this
DM - nae -"'wherc n = cpT le = cp(p/pi)R/" is the 'E .1ff function. Equation (3.168) represents thehydostatic relation in isentropic coordinates. Note also that M = dII + O.
To obtain an appropdate form for the horizontat pressue gradient force f[sr note rhat,in the usual height coordinates, it is given by
I v,p - ov -n,p-where 17 = crTld. Using (2.142) gives
0v.n = ev6n 9!a "6.' gaz
(3.r68)
(3.r69)
(3.170)
Then, using the definition of 11 and the hydrostatic approximation to help evaluate thevertical dedvativ€, w€ obtain
l:Vzp-(pVe7 - VeO-VeM.p
Thus, the horizontal momentum equation is
D]+fxu= vsM.
(3.171)
'll.l72)
13.t74)
. (3.175)
Much as ir the Boussinesq case, the mass continuify equation may be deived by notingthat th€ mass elem€nt may be witten as
a^ - - t.a,\ae * dt.gat
The mass continuity equation, Ddn /Dt = 0, becomes
(3.173)
DaD AoDt;a + ;6v1 v=t)
Itn aAE+ove.u= oi,
where norv d = apla6 is a measure of the (plessule) thickness between two isenropicsurfaces. Equations (3.168), (3.172) and (3.175) foDn a ctosed set, analogous to (3.163),(3.162) and (3.166).
3.9.3 * Analogy to shallow water equationsThe €quations of motion in isentropic coordinates hav€ an obvious anatogy wirh th€ shallowwat€r equations, and we may think of the shallow water €quations as a finite-alifference

3.10 Available Potential Energy I55
repr€sentation of the primitive equations {'ritten in isentropic coordinates, or tbinl ofthe latter as the continuous Limit of the shatlow water equations as the number of layerc
incr€ases. For example, consider a two-isentlopic_level representation of (3.168), (3 f72) and
(3.175), in which the lower boundary is an isenhope A natural finite differencing gives
Mt = IIoAqa (3.176a)
Mr-Mz=I Aet' (3176b)
$here th€ Ads are constants, and the momentum equations for each layer become
\3.I77a)
(3.r77b)
Dff+7xu: ddovrro
Dff + f xuz: -Mavrro aelvnr.
Together with the mass continuity €quation for each level th€se are just like the two_laver
shallow water equations (3.51). This means that rcsults that one might easilv derive for the
shallow water €quations will oft€n have a continuous analog
3.IO AVAILABLE POTENTIAL ENERGY
We now revisit tlle issue of the internal and potential energv ill stratifred flow, motival€d by
the folowirg remarks. In adiabatic, inviscid flow the total amormt of energy is conseNed'
and ther€ are conversions betlveen intemal €n€rgv, potential energy and kinetic energy lnan ial€al gas the pot€ntiat energy anal the internal energv of a column extending thoughoutthe atmosphere are in a constant ratio to €ach other - th€ir sum is called the total potential
energy. In a simple Boussinesq fluid, energetic conversions involve only th€ potential and
kinetic energy, and not the intemal energy. Yet, plair v, in neither a Boussinesq fluid noran ideal gas can ali the total potential eneryy in a fluid be conve ed to kinetic energy, fbrthen all of th€ fluid would be aaljat€nt to the ground and rhe fluid would have no thickness'
which intuitively seems impossible. Given a state of th€ atmosphere or ot€an, how much of
its total potential energy is available for conversion to kinetic energv? In particular, because
total energy is conserveal only in adiabatic flow, w€ mav usefu y ask how much potential
energy is available for conversion to kinetic energv und€r an adiabatic rearrangement offluid parcels?
Suppose that at any given time the flowis slably stratified' but that the isentropes (or
more generally the surfaces of constant pot€ntial densi9 are sloping, as in lig. 3 11 The
potential energy of the system woulal be reduced iJ the isentropes w€re flattened, for then
heavrer fluid would be moved to lower altitudes, with lighter fluid replacing il at high€r
altitudcs. In an adiabatic rearrangem€nt thc amount of fluid betwe€n the isentrcpes wouldremain constant, anal a state with flat isentropes (meaning parallel to the geopot€ntial
surfaces) evidently constitutes a state of minimum lotal potential encrgy. The difference
between the total potential energy of the fluid and the total potential en€rgv after an adiabatic
rearrangement to a state in which th€ isentropic surfaces are flat is called Ihc availablepotential energy, ot AJE.3

t56 Chapter 3. 5hallow lvarer Systems and Irentropi( Coordinates
lnitial state Minimum potential energystale
warm, liShter
0z
e3
0z
01
Ar
cold, dense
Flg. 3.1 I lf a stably stratifed lnltlal state wlth s lopinq is€ntopes (left) ls ad iabaticallyrearranged then the state of rninimum potential energy has flat isennopes, as onthe right, but the amounr of fluid.onrained beMeen.ach isentroplc sufa(e isunchanged. Th€ differ€nce betw€en the potential energles ofthe two gtates is theava i la ble potentla I ene rgy.
3.lO.l A Boussinesq nuid
The potential energy of a column of a Boussinesq fluid of unit area is given by
r = - [' u,a" = - !' b-a',.
22db- 22db- b^H2
(3.178)
(3.r80)
and the potential energy of the entire fluid is given by the hodzontal integral of rhis. Theminimum potential energy of th€ fluid aises after an adiabatic r€anangement in which theisopymals are flattened, and the resulting buoyaDcy is only a function of z. The availablepotential energy is then the difrerence between the energy of the initial state and of thisminimum state, and to obtain an approximate exprcssion for this we first integrate (3,178)
by parts 1o give
l+li=;t:, -il:
;)o 7db,;J",,'
, (3.179)
where ,a is the maximum value of b in the domain, and we may fomdly take th€ upperboundary to have this value of, without aff€cting the final result. The minimum potenoalenergy state adses when z is a function only of r, z = Z(b) say. Because mass is conservedin the rearrangement, Z is equal to the horizontally avemg€d value of z on a given isopycnalsurface, Z, and the sufaces Z and t thus d€fine each other completely. The average availablepotential energy, p€r unit area, is then given by
APE = -zz) db =
where z = Z + z'i that is, z' is t}le height variatio[ of an isopycnal surface, and the lastterm on the right'hand side of (3.179) has carcelled with an identical term in the expressionfor the potential energy of the re-arranged state. The available potential energy is thus

3.1 0 Available Potential Energy 157
a2l2rz+ -l lb-olz)l_b'
ablaz
_b
lz - 2(6\labt? z l.=z(ab\ -.\a, )'
Fig.3.12 An lsopy(nal surfac€, b = r, and the constant heisht sudac€, z = Z. z is theheight of the isopycnal surface after a rearrangement to a minimum potentialenergystate, equalto the average h€i9ht ofthe lsopycnal suface. The values of z on theisopycnal surface, and of , on the constant height surface. (an be obtained by theTaylor expanrions shown. For an ideal gas in pressure coordinatet, repla€e z by p
proportional to the integial of the variance of the altitude of such a surfac€, and it is apositive-definit€ quantity. To obtain an expression ir z coordinates, we express the heightvariatlons on an isopycnal surface in terms of buoyancy vadations on a surface of constant
hetht by Taylor expanding th€ height about its value on th€ isopycnal surface. Referring toFIg.3.12 this gives
(3.r81)
wljlre b' = b(z) - 6 \s conesponding buoyancy perturbation on the z surface and b is theaverag€ value of b on the z sudace. Furthermor€, azlabl=, - azlAb - @6lAz)-t, aLfi(3.181) thus becomes
.<at =z t fi\,_nta - aet =z - klo+b .
t =ab-z--a'(fi)"-dhw}lerc z' = z(Lt) - z is lhe height perturbatlon of the isopycnal surface, from its averageralue. Using (3.182) iD {3.180)we obtain an expression for the APE per ullit area, to 1\,lt
(3.182)
(3.r83)
The total A?E of the fluid is the horizontal inlegal of the above, and so is proportional tothe vaiance of the buoyancy on a height surface. we emphasize that A?E is not definedfor a single column of fluid, for it d€pends on the vanations of buoyancy over a ho zontalsurface. Note too that the derivation negl€cts the effects of topographyi this, ard the us€ ofabasic-state stratification, effectively restrict the use of(3.183) to a siryle ocean basin, and6'en for that the approximations used limit the accuracy of the expressions.
wz-:_ dzabtaz
ece = ',l^

I58 Chapter 3. Shallow Vvater Systems and tsentropic Coordinates
where pJ is the surface pressure, and the conesponding potential en€rgy is given by
3.10.2 An idealgas
The e\T'ression for the ApE for an ideal gas is obtaineal, mrrads mrrandb in the same wayas for a Boussinesq fluid and the trusting reaaler may skip directly to (3.191). The int€malenergy of an ideat gas column of unit ar€a is given by
cvTpdz = r;Trde.r=l
r = [- oe,a. = t''
(3.r84)
(3.r89)
zdp = l' eaz = {3.r8s)
In (3.184)weuse hydrostasy, alldin(3.185) the equalities make successive use of hidrostasy,an integration by pafiq hydrostasy and the ideal gas relation. Thus, the total potential€neruy GPE) is given by
f'4'o,'
Gl.'?re).
or=,,r_9 Jo.rdv.
Using the ideal gas equation of state we can $,rit€ thjs as
(3.186)
t^r= ^:i!all
d.e, (3.187)TPE =
after an integation by parts. (We omit a telm propotional to pJd, that arises in theintegation by parts, because it cancels in a similar fashion to the boundary term in theBoussllesq derivation; ff taLe dr = 0.) The total porential energy of the entfe fluid is equalto a hodzontal integral of (3.187). The miDjmum totat potential energy arises when thepressue itr (3.187) is a function or y of A, p = P(d), where by conservation of mass p isthe average value of the odginal pressure on the isentropic surface, p = U. The averageavailable potential energ_y per unit area is thetr giv€n by the difference betweetr the initialstate and this mfuimnm, namely
^*=;,**'';;l(hl.' - (;)-.'] *, (3.r88)
which is a positive'd€finite quantity. A useful approximation to this is obtained by exFessingthe right-hand side in tems of rhe variance of the potential t€mperature on a pressruesMace. W€ fust use the binomial expansion to e).Tand px+l = (p + p')k+r. Neglecting thirdand higher-order tems (3.188) becomes
*'=*t(i,)'.'H *Th€ vadable p' = p(d) 7is a pressuie perturbation on an isentropic sruface, ard is relatedto the potential temperature p€rturbation on an isobaric suface by [cf. (3.182)]
"'" e a.t ^- !. d0 aqlAp(3.rs0)

r]al
--
Notes and Problems I59
wherc 0' : 0(p) d(zJ is the potcntial temperature perturbatlon on thc 7 surface. using(3.r90) in (3.I89) we finalty obtain
*'=YIi'u' I aer'\ sar) o" ap
Th€ A?E is thus proportional to th€ variancc of the pot€ntial temperature on thc pressure
surface or, from (3.189), proportional to the va ance of the pressure on an lsentropic
3.1O.3 use, interpretation, and the atmosphere and o.ean
The potcntial energy of a fluid ls reduccd s'hen the d)'namics acts to flatten the is€ntropcsConsider, for example, the Earth's atmospherc, with isentropes sloping upwards towardthe pole (Iig. 3.Il with thc pole on the dght). Flattcning these isentropes amounts to a
sinling of dcnse air and a rising of light air, and this reduction of potcntial €n€rgy leads toa corresponding production ofkinetic energy. Thus, if the dynamics is such as to reduce
the temperaturc gradient between equator and pole by flattening the iscntropes thenAPEisconve ed to KE by that proccss. A statistically steady state is achieved because thc heating
from the Sun continually acts to restore the horizontal temperature gradi€nt betlveen equator
and pole, thus rcplenishing the pool of APE, and to this extent the large-scale atmospheric
cfculation acts like a h€at cngine.It is a uscful exercise to calcl ate thc total potential eneryy, the available pot€ntial energy
and the kinetic energy of atmosphere and th€ oc€an, (problem 3.16) one finds
(3.r9r)
(3.192)TPE>> APE> KE
bith, vcry approximar€ly, TPE - lo0APtand APE - I0 Kt Thc first inequalitv should notsurpns€ us (as it was this that led us to definc APE in the ffst instance), but th€ second
inequality is not obvious {and in facl the ratio is largcr in the ocean) It is rclated to the
fact that th€ instabilities of the atmosphcrc and ocean occur at a scale smaller than the size
of the domain, and are unable to release all the potential en€rgy that might be availabl€
fnderstanding this more fully is the topic of chapt€rs 6 and 9.
I The alsorithm to solve these equations numerically differs from that of the free surface
shallowwater equations because the mass conservation equation can no longer be stepped
foMard in time. Rather, an elliptic equation for prd must be derived bv eliminating timedeivatives between (3.22) usinq (3.21), and this is then solved at each timestep.
2 After N4argules (1903). Marqules sought to relate the enerqy offronts to their slope ln this
same paper the notion of available potential energy arose.
3 The expression form draq'ls also commonly used in aerodynamics, and the two usages are
related. ln aerodynamics, form draq is the force due to the pressure difference between the
front and he rear of an object, or any other 'form', moving through a fluid. Aerodynamit

t60 Chaprer 3. Shallow Water Systems and lsentropic Coordinates
form draq may include frictional effects between the wind and the surface itself, but these
are omitted in most 9€ophysical uses.
0ules) Henri Poincare (l854-l912) was a prodigious French mathematician, physicist andphilosopher, reqarded as one ofthe qreatest mathematicians living at the turn ofthe twentieth
centurv. He is remembered for his oriqinal work in alqebra and topology, and in dynamicalsvstems and celestial mechanics, obtaininq many results in what would be called nonlineardynamics and chaos when these fields re emerged some 60 yea6 later - the notion of'sensitive dependence on initial €onditions', for example, is present in his work. He also
obtained a number of the results ofspeciaLrelativity independently ofEinstein, and worked on
the theory ofrotating fluids hencethePoincar€wavesofthisthapter.Hewroteextensivelyand successfullyforthe generalpublir on the meanins, importanc€ and philosophyofscience.
Among otherthings he discussed whether scientific knowledqe was an arbitrary convention,a notion that remains discussed and controversial to this day. (His answer: '.onvenlion', inpart, yest arbitrary" no.) He was a proponent ofth€ role of intuition in mathematicalandscientinc prosress, and did not believe that mathematics could ever be wholly reduced to
Thomson (1869). w. Thompson later became Lord Kelvin. See Gill(1982) or Philander (i990)
As considered by Rossby (l938).
An introduction to variational problems may be found in weinstock (1952) and a number ofother textbooks. Applications to many traditional problems in mechanics are discussed by
Lanczos (1970).
l4argules (]903) introduced the.oncept of pot€ntialenergy that is avaiable for conversion tokinetic energy, Lorenz (1955) clarified its meanins and derived useful, approximate formula€
for its computation. Shepherd (l993) showed that the APE is just the non kinetic part ofthe pseudoenergy, an interpretation that naturally leads to a number of€xtensions of theconcept. There are a host ofother papers on ihe subject, including that of Huang (1998) wholooked at some ofthe limitations ofthe approximate expressions in an oceanic context.
Gill, A. E., 1 9A2. Atnosphere-Ocean Dynamics.This remains a good reference for geostrophic adjustment and gravity waves. The timedependent geostrophic adjustment problem is discussed in section 7.3.
3.1 Derive the appropriate shallow water equations for a single movinq layer offluid ofdensity prabove a risid floor, and where above the movins fluid is a stationary fluid ofdensity p0, wherepo < pr. Show that as (polpr) - 0 the usual shallow water equations emerge.
3.2 @ Model the atmosphere as two immiscible, 'shallow water' fluids of different densitystacked one above the other. Using reasonabl€ values for any required physical parame-
ters, estimate the displacement ofthe interfacial surfa(e associated with a pole equatortemperature gradient of 60 K,
(n Similarly estimate an interfacial displacement in the ocean associated with a temperaturegradienr of20K over a distance of4000km. Ohis is a cftrd€ representation ofthe maino.eani. thermocline.)
3.3 t For a shallow water fluid the energy equation, (3.88), has the form arlat + V tt(E +ghzl2)l: O. But fot a.ompressible fluid, the corresponding energy equation, (l.187), has
6
7

Notes and Problems I5l
the fom aElaf + v [r(I + p)] = 0 ln a shaLlow water fluid P +gh':l2 at a point sothe5e
equations are supefficially different Explain this and reconcile the two forms (Hint: What is
the averaqe pressure in a fluid coLumn?)
3.4 a can the shallow water equations for an incompressible fluid be derived by wav of an
asymptotic expantion in the aspect ratio? lf so, do it That is, without assuminq hvdrostasv
ab initio, expand the Euler equations with a free surface in a small parameter equal to the
ratio ofthe depih ofthe fluid lo the horizontal scale ofthe motion, and so obtain the shallow
water equations,
1.5 The inviscid shallow water equauons, whether rotating or not, can support gravity waves ofarbitrarilyshort wavelenqths. For suffcientlv high wavenumber, the wavelength will be shorter
than the depth ofthe fluid. ls this consistentwith an asvmptoiic nature ofthe shallowwater
equations? Discuss.
3.6 Show that the venical velocity within a shallow water svstem is qiven by
z-nrDh Dn,
'= h Dr' Dr
lnt€rpret this result, showing that it qiv€s sensible answers at the top and bottom ofthe fluid
3.7 What is the appropriate qeneralization of(3.97) to two dimensionsT Suppose lhat attime I = 0
theheightfieldisgivenbyaGaussiandktributionh'=Aer/"',where/'?=x':+it': what
is the subsequent evolution of this, in the linear approximation? Show that the distribution
rema ns Gausslan, and that its w dth increases at speed 1'?F where n s the mean depth of
1.8 ln an adiabat c shallow water fluid ln a rotating reference frane show that the potentiaL
vorticitv conservation law is' !!!=o (P3.2)Dtn hb
where t is the height ofth€ fiee surface and h, c the height ofthe bottom topography' both
referenced to the same flat surface
(4) A cyLirdricalcolumn ofalr at 30'latilude with radius 100 km expands hor zontallv to twice
its originalradius. lfthe air is lnitially a! rest, what is the mean targentialvelociiv at the
perimeter after ihe expansion?(r) An air colu m n at 60' N wlth zero re lative vorticill/ (( = 0) stretches frorn the su rface to the
tropopause, which we assume k a rigid lid, at lokrn The air column moves zonallv on to
a plateau 2,5 km hi9h. what is its relative vorticitv? suppose it then moves southwards to
30'N. What is its vor! city? (Assume that the densitv is constart.)
3.9 a ln the long wave limit of Poincar€ waves, fluid parcels behave as free-aqentsl that is, ike
free so id particles moving in a rotatlng frame unencumbered bv pr€ssure forces Why lhen, is
their frequencv qiven by o = / = 2r) where C ls the rotation rate ofth€ coordinate system'
and not by.o itsel? Do particles that are stationary or move in a straight line ir the nertlal
frame of ref€rence satisfy the dispe6ion relationship for Poincar€ waves in this lirnit? Exp ain'
lsee also Duran (1993), E99er (1999) and Phillips (2000) l
l.l o Linearize the J-plane shallow water system about a state of rest Suppose that there is an
iritialdisturbance qiven in the qeneralform
n = lJa., "'*"'at ar, (P3-3)
(rl.r)
where 4 is the deviation surface heiqht and the Fourier coeffitjerc irr are given' and that the
initialve ocity is zero.

162 Chapter 3. Shallow Water Systems and lsentropic Coordinates
fr) Obtain the seopotential field at the completion ofgeostrophic adjustment, and showthatthe defomation scale is a natural lenqth scale in th€ problem.
(r) Show that the change in total energy d uring the ad.iustment is always less than or eq ual tozero. Neglect any initial divergence.N.B. Becalse the problem is linear, the Fou er modes do not inreract.
3.ll One way of assimilatins obsewatjons into numerical models isviaa method known as'nudgins' or 'robust diagnosrics'. ln this method, a relaxation tem is added to rhe right handside of an €volution equation, relaxins the fi€ld back to observations. Thus, for example,DO/DI = othert€rms + l(dobs - 0). lf 0 is potentialt€mperature, is this m€thod likely towork better in th€ ocean or in the atmosphere, as regards reproducing the large scale meanpotential temperature and velocity fields? What steps might be taken to improve the method?
1.12 Geosttophtc adpstnent of d vetocityjunpConsider the evolution ofthe lin€arized J-plane shallowwater €quations in an infinitedomain.Suppose that initially the fluid surface is flat, the zonalvelociry is zero and the meridionatvelocity is given by
?(t) = 1,ossn(x)
(a) Find the equilibium height and velocity fi€lds at t = 6.fA what are the initial and final kinetic and potential energies?
The potential vorticity is 4 = ( j04lH, so that th€ initial and finat state are
(?3.4)
q = zl,a 6(x). (P3.s)
(why?) rhe final stare srreamlun.$on ir thus given bv (d' .A" L, ) q' . 4. wrlh solurionq = qoexp(xlLd) and q' = qoexp( xlla) fot x <0andr. > 0, where qd =rr'uo (whvt,and n = lov lg.lhe enetgy is E = I\Hu, + grtr)l2dt The initiatKE is infinite, the initiatPE is zero, and the final state has PE = KE = gLdntl4 that is, the energy is equipartitionedbetween kinetic and potential energies.
3.13 ln the shallowwater equations show that, ifth€ flow is approximately g€ostrophicatty balanced,the energy at large scales is predominanrly potential en€rgy and that €nergy at smalt scates ispredominantly kinetic energy. D€frne precisely what 'large scat€' and 'smalt scat€' mean in
3.14 ln the shallowwat€r geostrophic adjusrment problem, show rhar at large scates the velocityadjusts to th€ heightfreld, and that at small scales the height fietd adjusts to the vetocity fietd.
3.15 t Consider the problem of minimizing the full energy li.e., I(hrr)+gar)dtl, given rhepotential vofticity field 4(x,y) : (( + f)lh- Show thar the batance retations anatogousto (3.8.5) ar€ r,h = a@q t) lay and uh - a@4 r)/ax where B is the Bernou i functionB = gtt +v212. Show thar steady flow does not nec€ssarily satisf,/these equations. Discuss.
3.l6 Using realistic values for temperature! velocity, etc.,.alculate approxinatevalues for the totalpotential energyi the available potentialen€rgy and the kinetic energy, ofeither a hemispherein the atmosphere or an ocean basin.
Related Documents