


UNIVERSITÉ FRANÇOIS – RABELAIS DE TOURS
ÉCOLE DOCTORALE EMSTU
GREMAN UMR 7347
THÈSE présentée par :
Julien BUSTILLO
soutenue le : 10 décembre 2013
pour obtenir le grade de : Docteur de l’université François – Rabelais de Tour s
Discipline/ Spécialité : Electronique
CARACTERISATION NON DESTRUCTIVE DU SILICIUM POREUX
PAR METHODE ULTRASONORE
Directeurs de Thèse : LETHIECQ Marc GAUTIER Gaël
Co-encadrant : FORTINEAU Jérôme RAPPORTEURS :
DESPAUX Gilles Professeur des universités, Université Montpellier 2 REMAKI Boudjemaa Maître de conférences HDR, Université Lyon 1
JURY :
IZBICKI Jean-louis Professeur des universités, Université du Havre DESPAUX Gilles Professeur des universités, Université Montpellier 2 REMAKI Boudjemaa Maître de conférences HDR, Université Lyon 1 LETHIECQ Marc Professeur des universités, Université François-Rabelais de Tours GAUTIER Gaël Maître de conférences HDR, Université François-Rabelais de Tours FORTINEAU Jérôme Maître de conférences, Université François-Rabelais de Tours


Insérer ici éventuellement votre dédicace

i

ii
Remerciements
Je tiens à remercier chaleureusement Marc Lethiecq, Gaël Gautier et Jérôme Fortineau
pour m’avoir proposé ce travail de recherche et de m’avoir encadré pendant cette thèse. Leur
soutien ainsi que leur aide m’ont toujours été précieux.
Je remercie vivement monsieur Jean Louis Izbicki pour avoir accepté d’être membre
de présider mon jury de thèse ainsi que messieurs Gilles Despaux et Boudjeema Remaki pour
l’attention particulière qu’ils ont porté à mon manuscrit de thèse et pour leur participation au
jury.
Merci à l’ensemble des personnels du site ST du GREMAN qui m’ont toujours
accueilli comme un membre à part entière de leur équipe. J’adresse un remerciement tout
particulier à Marie, Thomas et Sébastien qui ont pris le temps de me former sur la cuve
d’électrochimie et qui ont toujours été très disponibles.
Merci à l’ensemble des doctorants, post-doctorants et stagiaires qui sont passés au sein
du laboratoire au cours de ma thèse. Leurs discussions scientifiques, politiques ou sportives
m’ont permis d’ouvrir de nouveaux horizons, notamment sur les grands présidents et sur le
PSG... Les repas partagés ainsi que les cafés proposés (et jamais refusés) m’ont permis de
découvrir de vrais « djambars » et « binguistes », toujours prêt à être solidaires.
Merci à Mathieu pour l’ensemble des discussions scientifiques que nous avons eues et
de m’avoir permis de travailler avec lui et de partager son expérience.
Merci à Didier qui a toujours été disponible pour tous les tracas quotidiens et qui a
toujours su être attentif à nos demandes.
Merci à l’ensemble de l’équipe pédagogique du Génie Electrique pour m’avoir intégré
et de m’avoir toujours permis de me sentir libre de mes choix en enseignement.
Merci enfin et surtout à mes proches qui ont dû me supporter pendant cette période de
thèse.
iii
Résumé
Le silicium poreux est un matériau qui est actuellement utilisé dans de nombreux
domaines, tels que la biologie ou la microélectronique, grâce à ses propriétés remarquables.
De nombreuses applications sont étudiées au sein du laboratoire GREMAN, telles que la
fabrication de vias électrique ou de capacités 3D. Le matériau étudié au sein de cette thèse est
du mésoporeux, qui est utilisé comme substrats dans les applications RF. La caractérisation
non destructive de ce matériau est encore limitée, soit selon l’épaisseur de la couche poreuse,
soit selon la taille des pores. Cela limite ainsi l’industrialisation des procédés de fabrication de
silicium poreux. Une technique ultrasonore de caractérisation est proposée dans cette thèse
afin de permettre un suivi de la gravure in situ et en temps réel. Ainsi les variations de gravure
peuvent être contrôlées.
Premièrement, la méthode de fabrication du silicium poreux est étudiée, en se
focalisant sur le silicium mésoporeux. L’étude de la gravure électrochimique et des cuves où
s’effectue la gravure ont permis de définir les paramètres microgéométriques de la couche
poreuse. Grâce à la connaissance de la taille des pores et de leur orientation, les constantes
mécaniques ainsi que les valeurs de tortuosité et de perméabilité sont estimées. L’étude de la
propagation des ondes ultrasonores au sein de la couche poreuse est effectuée grâce au
modèle de Biot et le spectre de transmission au travers de la plaque de silicium gravé est
calculé. Il est alors comparé au spectre de transmission mesuré grâce à une méthode
d’insertion-substitution, adapté au dispositif de gravure, et les paramètres épaisseur et porosité
sont déterminés grâce à une résolution de problème inverse basé sur un algorithme génétique.
Une comparaison de ces valeurs avec celles obtenues à partir de mesures destructives sur ces
mêmes échantillons montre l’intérêt de la mesure ultrasonore.
Mots clés : silicium poreux, caractérisation non destructive, ultrasons, algorithme génétique.

iv
Résumé en anglais
Insérer votre résumé en anglais suivi des mots-clés

v
Table des matières
REMERCIEMENTS ........................................................................................................................................... II
RESUME ............................................................................................................................................................. III
TABLE DES MATIERES .................................................................................................................................... V
LISTE DES FIGURES ....................................................................................................................................... IX
LISTE DES TABLEAUX ................................................................................................................................ XIII
INTRODUCTION ................................................................................................................................................. 1
CHAPITRE 1 : GRAVURE ELECTROCHIMIQUE DU SILICIUM PO REUX ........................................... 6
1 PRINCIPE DE LA GRAVURE DU SILICIUM POREUX ......... ............................................................. 8
1.1 BASES DE LA PHYSIQUE DES SEMI-CONDUCTEURS .............................................................................. 9
1.1.1 Théorie des bandes ................................................................................................................... 9
1.1.2 Conducteurs, isolants et semi conducteurs : définitions ......................................................... 11
1.1.3 Propriétés des semi-conducteurs ............................................................................................ 13
1.2 INTERFACE SILICIUM-ELECTROLYTE ................................................................................................ 16
1.3 CARACTERISTIQUE COURANT-TENSION ............................................................................................ 18
1.4 REACTIONS CHIMIQUES A L’ INTERFACE ........................................................................................... 19
1.4.1 Solution d’acide fluorhydrique ............................................................................................... 19
1.4.2 Formation de silicium poreux ................................................................................................. 20
1.4.3 Electropolissage ..................................................................................................................... 20
2 INFLUENCE DES CONDITIONS DE GRAVURE................................................................................ 21
2.1 INFLUENCE DU SUBSTRAT ................................................................................................................ 21
2.1.1 Macropores : exemple du type n- ............................................................................................ 22
2.1.2 Mésoporeux : n+ et p+ ........................................................................................................... 23
2.2 PARAMETRES DE LA GRAVURE ......................................................................................................... 24
2.2.1 Durée de gravure .................................................................................................................... 24
2.2.2 Densité de courant .................................................................................................................. 24
2.2.3 Concentration de HF .............................................................................................................. 26
2.2.4 Mode de gravure : courant ou tension constante ................................................................... 27
2.3 PROBLEMATIQUE DES COUCHES EPAISSES ........................................................................................ 27
2.3.1 Variation de la porosité .......................................................................................................... 27
2.3.2 Séchage de la couche poreuse ................................................................................................ 28
3 MESURES DES PROPRIETES DE LA COUCHE POREUSE ............................................................ 29
3.1 M ICROSCOPIE ELECTRONIQUE .......................................................................................................... 29
3.2 DIFFRACTION DES RAYONS X ........................................................................................................... 30

vi
3.3 SPECTROSCOPIE RAMAN .................................................................................................................. 31
3.4 ADSORPTION ISOTHERME (BET) ...................................................................................................... 31
3.5 SPECTROMETRIE PAR ELLIPSOMETRIE .............................................................................................. 32
3.6 SPECTROSCOPIE SLIM ..................................................................................................................... 32
3.7 SPECTROSCOPIE INFRAROUGE A TRANSFORMEE DE FOURIER ........................................................... 32
3.8 GRAVIMETRIE .................................................................................................................................. 33
3.9 DISCUSSION ..................................................................................................................................... 33
4 DISPOSITIFS MIS EN ŒUVRE AU LABORATOIRE ........... ............................................................. 35
4.1 CUVES D’ELECTROLYSE ................................................................................................................... 35
4.2 FABRICATION DES SPECIMENS .......................................................................................................... 37
5 CONCLUSION ........................................................................................................................................... 40
CHAPITRE 2 : ACOUSTIQUE DES MILIEUX POREUX ........ ................................................................... 41
1 MATERIAUX POREUX ........................................................................................................................... 43
1.1 GRANDEURS CARACTERISTIQUES ..................................................................................................... 43
1.1.1 Porosité .................................................................................................................................. 43
1.1.2 Tortuosité................................................................................................................................ 46
1.1.3 Perméabilité ........................................................................................................................... 47
1.1.4 Longueur caractéristique visqueuse ....................................................................................... 48
1.2 MESURES ET ESTIMATIONS ............................................................................................................... 48
1.2.1 Porosité .................................................................................................................................. 48
1.2.2 Tortuosité................................................................................................................................ 49
1.2.3 Perméabilité ........................................................................................................................... 50
2 PROPAGATION DES ONDES ULTRASONORES ............................................................................... 51
2.1 RELATION DE PROPAGATION DANS UN MILIEU HOMOGENE .............................................................. 52
2.2 ONDES MECANIQUES DANS UN MILIEU POREUX ................................................................................ 53
2.2.1 Modèle de Gassmann ............................................................................................................. 53
2.2.2 Modèle de Biot ........................................................................................................................ 55
2.2.3 Modèles semi phénoménologiques ......................................................................................... 57
2.3 CONCLUSION .................................................................................................................................... 57
3 DETERMINATION DES CONSTANTES MECANIQUES DE LA MATRI CE ................................. 58
3.1 NOTION DE VOLUME ELEMENTAIRE REPRESENTATIF ........................................................................ 58
3.2 LIMITES MECANIQUES ...................................................................................................................... 59
3.2.1 Fonctions usuelles .................................................................................................................. 59
3.2.2 Limites de Reuss et de Voigt ................................................................................................... 60
3.2.3 Limites de Hashin-Strikman ................................................................................................... 61
3.3 ESTIMATION DE VOIGT-REUSS-HILL ................................................................................................ 62
3.4 ESTIMATIONS DANS LE CAS D’ INCLUSIONS SPHERIQUES .................................................................. 62

vii
3.4.1 Kuster et Toksöz (KT) ............................................................................................................. 62
3.4.2 Self Consistent Approximation (SCA) ..................................................................................... 62
3.4.3 Differential Effective Medium (DEM) .................................................................................... 63
3.5 ESTIMATIONS DANS LE CAS D’ INCLUSIONS NON SPHERIQUES .......................................................... 63
3.6 APPLICATION AU SILICIUM POREUX ................................................................................................. 65
3.6.1 Estimation de la tortuosité et de la perméabilité ................................................................... 65
3.6.2 Estimation des constantes mécaniques de la matrice ............................................................. 67
3.6.3 Comparaison avec l’expérience ............................................................................................. 68
3.7 CONCLUSION .................................................................................................................................... 69
4 MODELISATION D’UNE ONDE ULTRASONORE A TRAVERS UN MA TERIAU BICOUCHE 70
4.1 PROPAGATION DANS UNE COUCHE HOMOGENE ................................................................................ 70
4.2 APPLICATION A UN MULTICOUCHE ................................................................................................... 71
5 CONCLUSION ........................................................................................................................................... 73
CHAPITRE 3 : CARACTERISATION ULTRASONORE DU SILICIU M POREUX ................................ 75
1 METHODE D’INSERTION-SUBSTITUTION .................. .................................................................... 76
2 TRAITEMENT TEMPOREL DU SIGNAL ..................... ....................................................................... 78
2.1 PRINCIPE DE BASE ............................................................................................................................ 78
2.2 RECOUVREMENT PARTIEL DES SIGNAUX .......................................................................................... 83
2.3 DETERMINATION DES PROPRIETES ACOUSTIQUES DE LA COUCHE POREUSE ...................................... 84
2.3.1 Dispositif expérimental ........................................................................................................... 84
2.3.2 Estimation de la vitesse ............................................................................................... 85
2.3.3 Estimation de l’atténuation ........................................................................................ 87
2.4 DECONVOLUTION ............................................................................................................................. 89
2.4.1 Principe .................................................................................................................................. 89
2.4.2 Résultats ................................................................................................................................. 91
2.5 DISCUSSIONS .................................................................................................................................... 92
3 TRAITEMENT FREQUENTIEL DU SIGNAL : PRESENTATION ET VALIDATION .................. 93
3.1 MODELE DE PROPAGATION DES ONDES AU SEIN DE LA PLAQUETTE DE SILICIUM .............................. 94
3.2 M ISE EN PLACE DE L’ INVERSION DU PROBLEME ............................................................................... 96
3.2.1 Principe de l’inversion ........................................................................................................... 96
3.2.2 Algorithme génétique .............................................................................................................. 98
3.2.3 Relation impédance acoustique-porosité .............................................................................. 102
3.3 ETUDE DE CONVERGENCE DE L’ALGORITHME GENETIQUE ............................................................. 104
3.3.1 Choix des paramètres de l’algorithme génétique ................................................................. 105
3.3.2 Résultat de l’ajustement........................................................................................................ 106
3.4 DISCUSSIONS .................................................................................................................................. 109
viii
4 METHODE FREQUENTIELLE : CARACTERISATION DE LA COUCH E DE SILICIUM
POREUX ............................................................................................................................................................ 109
4.1 PRESENTATION DES ECHANTILLONS ............................................................................................... 109
4.2 EXPERIENCE ET PARAMETRAGE DE L’AJUSTEMENT ........................................................................ 110
4.3 RESULTATS .................................................................................................................................... 110
4.3.1 Porosité constante ................................................................................................................ 110
4.3.2 Profondeur de gravure constante ......................................................................................... 112
4.3.3 Variation de porosité en fonction de la profondeur.............................................................. 113
4.4 DISCUSSIONS .................................................................................................................................. 115
5 CONCLUSION ......................................................................................................................................... 116
CONCLUSIONS ET PERSPECTIVES .......................................................................................................... 118
BIBLIOGRAPHIE ............................................................................................................................................ 122
RESUME ............................................................................................................................................................... 1
RESUME EN ANGLAIS ...................................................................................................................................... 1

ix
Liste des figures
FIGURE 1 : NIVEAU D 'ENERGIE DES ELECTRONS DANS LE CAS D'UN ATOME ISOLE, DE 5 ATOMES LIES ET D’UN
SOLIDE. ......................................................................................................................................................... 10
FIGURE 2 : BANDES D'ENERGIE EN FONCTION DE LA DISTANCE INTERATOMIQUE POUR LES ELEMENTS DE LA
COLONNE IV DU TABLEAU DE MENDELEÏEV POUR UNE STRUCTURE DIAMANT. ............................................. 10
FIGURE 3 : EVOLUTION DU BAND GAP EN FONCTION DE LA TEMPERATURE DANS LA GAMME 0-300°K DANS LE CAS
DU SILICIUM [30]. .......................................................................................................................................... 11
FIGURE 4 : EVOLUTION DE LA CONDUCTIVITE EN FONCTION DE LA TEMPERATURE SELON QUE LE MATERIAU SOIT
CONDUCTEUR, ISOLANT OU SEMI-CONDUCTEUR. ........................................................................................... 12
FIGURE 5: PRESENTATION DU CONCEPT DE TROUS ET D’ELECTRONS LIBRES DANS UN SEMI-CONDUCTEUR [34]. ... 14
FIGURE 6 : DOPAGE D'UN SEMI-CONDUCTEUR PAR UN ATOME DE BORE. LE TROU DEVIENT ALORS LIBRE ET LA
CHARGE CORRESPONDANT A L’ATOME DE BORE IONISE EST FIXE [34]. ......................................................... 14
FIGURE 7 : DOPAGE D'UN SEMI-CONDUCTEUR PAR UN ATOME DE PHOSPHORE. L’ ELECTRON DEVIENT ALORS LIBRE
ET LA CHARGE DU PHOSPHORE EST FIXE [34]. ............................................................................................... 15
FIGURE 8 : DESCRIPTIONS DES POTENTIELS D'ENERGIE PRESENTS LORS D'UNE IMMERSION D'UN SEMI-CONDUCTEUR
DE TYPE N DANS UNE SOLUTION ELECTROLYTIQUE. ...................................................................................... 16
FIGURE 9 : DIFFERENTS ETATS DE CHARGE POSSIBLES DANS UN SEMI-CONDUCTEUR PLONGE DANS UN
ELECTROLYTE, CAS DU TYPE N ET DU TYPE P. ................................................................................................ 17
FIGURE 10 : ALLURES TYPES DES COURBES COURANT-TENSION DANS LE CAS DE TYPE P (A) ET DE TYPE N (B),
D’APRES [36]. ................................................................................................................................................ 18
FIGURE 11 : MORPHOLOGIE DU SILICIUM POREUX ET LES MECANISMES DE GRAVURE SELON LE TYPE DE DOPAGE
[41]. .............................................................................................................................................................. 21
FIGURE 12 : IMAGE MEB D'UN ECHANTILLON DE TYPE N FAIBLEMENT DOPE GRAVE DANS UNE SOLUTION DE HF
(15%) A 93 MA/CM² PENDANT 30 MINUTES DANS L'OBSCURITE. ................................................................... 23
FIGURE 13 : IMAGE MEB D'UN ECHANTILLON DE TYPE N FAIBLEMENT DOPE GRAVE DANS UNE SOLUTION DE
HF(2.5%) A 20 MA/CM² PENDANT 30 MIN AVEC UN ECLAIREMENT EN FACE ARRIERE [43]. ......................... 23
FIGURE 14: EVOLUTION DU DIAMETRE DES PORES EN FONCTION DU DOPAGE POUR DIFFERENTES DENSITES DE
COURANT DANS UNE SOLUTION D’HF ET D’ETHANOL (1:1), CAS DU TYPE N ET DU TYPE P, D’APRES [46]. ..... 24
FIGURE 15 : EVOLUTION DE LA POROSITE EN FONCTION DE LA DENSITE DE COURANT DANS LE CAS DE SUBSTRATS
DE TYPES P+ POUR DIFFERENTES CONCENTRATION D’HF [47]. ...................................................................... 25
FIGURE 16: EFFET DE LA DENSITE DE COURANT SUR LA VITESSE DE GRAVURE DU SILICIUM [48]........................... 25
FIGURE 17 : EVOLUTION DE LA DENSITE DE COURANT JPS (EN POINTILLE) ET DE LA DENSITE DE COURANT
MINIMALE D 'ELECTROLISSAGE (EN CONTINU) EN FONCTION DE LA CONCENTRATION [49]. ........................... 26
FIGURE 18 : EVOLUTION DE LA POROSITE EN FONCTION DE LA CONCENTRATION DANS LE CAS DE SUBSTRAT P+
POUR DIFFERENTES DENSITES DE COURANT [50]. .......................................................................................... 26
FIGURE 19 : VARIATION DE LA CONCENTRATION EN FONCTION DE LA PROFONDEUR DES MACROPORES GRAVES
DANS UN SUBSTRAT DE TYPE N FAIBLEMENT DOPE [45]. ............................................................................... 28

x
FIGURE 20: EXEMPLE DE DECOLLEMENT OU DE FISSURES DE COUCHES DE SILICIUM MICROPOREUX LORS DU
SECHAGE. ...................................................................................................................................................... 29
FIGURE 21 : DISTRIBUTION DE L'INTENSITE AU VOISINAGE DE LA REFLEXION DE BRAGG (004) DANS LE CAS D'UN
SUBSTRAT DE TYPE P+. LES CERCLES CORRESPONDENT A LA MESURE EXPERIMENTALE, LES POINTILLES
CORRESPONDENT AUX PICS DE SILICIUM POREUX (POR-SI) ET CRISTALLIN (C-SI). LE TRAIT CONTINU EST LA
SOMME DES DEUX PICS, [58] D’APRES [59]. ................................................................................................... 30
FIGURE 22 : EVOLUTION DE LA FREQUENCE DE RESONANCE DU SPECTRE RAMAN EN FONCTION DE LA TAILLE DES
CRISTALLITES [60]. ....................................................................................................................................... 31
FIGURE 23 : EVOLUTION DE L'ADSORPTION ISOTHERME EN FONCTION DE LA PRESSION DANS LE CAS D'UNE COUCHE
DE SILICIUM MESOPOREUX FORME A PARTIR DE SUBSTRAT DE TYPE P+. L'ADSORBAT UTILISE EST DE L'AZOTE,
A UNE TEMPERATURE DE 77°K [62]. .............................................................................................................. 32
FIGURE 24 : COUPE ET VUE GLOBALE DES CUVES CP1 ET CP2. .............................................................................. 36
FIGURE 25 : COUPE DE LA CUVE CP3. .................................................................................................................... 36
FIGURE 26 : IMAGE MEB D'UN ECHANTILLON DE TYPE P FORTEMENT DOPE GRAVE EN SOLUTION D’HF (30%) A
UNE DENSITE DE COURANT DE 43.6 MA/CM2. ................................................................................................ 37
FIGURE 27 : PRESENTATION DES DIFFERENTS VOLUMES COMPOSANT UN MILIEU POREUX. LES VOLUMES ET
CORRESPONDEND RESPECTIVEMENT A L’ENSEMBLE DU VOLUME OCCUPE PAR LES PARTICULES SOLIDES (A
GAUCHE) ET A L’ENSEMBLE DU VOLUME OCCUPE PAR LE FLUIDE (AU MILIEU ). ............................................. 43
FIGURE 28 : PRINCIPAUX EMPILEMENTS DE SPHERES UTILISES POUR LA MODELISATION DES ESPACES POREUX
IDEAUX AINSI QUE LEURS POROSITES RESPECTIVES. ...................................................................................... 44
FIGURE 29 : PRESENTATION DES DEPLACEMENTS MICROSCOPIQUES DE FLUIDE SELON LA GEOMETRIE DES PORES :
DROITS (A), OBLIQUES (B) OU DE RAYON VARIABLE (C). ................................................................................ 46
FIGURE 30 : DETERMINATION DE LA LONGUEUR VISQUEUSE PAR RAPPORT A LA GEOMETRIE DU PORE. ................. 48
FIGURE 31 : CAS EXTREMES RENCONTRES LORS DE L'HOMOGENEISATION : FORCES S’APPLIQUANT DANS LE PLAN
DES COUCHES (A), PERPENDICULAIREMENT AUX COUCHES (B), EQUIVALENT AUX SUSPENSIONS DANS UN
FLUIDE (C). .................................................................................................................................................... 60
FIGURE 32 : DISPOSITION DES ESPECES DANS LA METHODE D'HOMOGENEISATION PROPOSEE PAR HASHIN-
STRIKMAN . .................................................................................................................................................... 61
FIGURE 33 : ESTIMATION DE LA TORTUOSITE (A) ET DE LA PERMEABILITE (B) EN FONCTION DE LA POROSITE. ...... 66
FIGURE 34 : ESTIMATION DE LA TORTUOSITE DYNAMIQUE EN FONCTION DE LA FREQUENCE POUR UNE POROSITE DE
50% (A) ET EN FONCTION DE LA POROSITE POUR UNE FREQUENCE DE 20 MHZ (B). ....................................... 67
FIGURE 35 : ESTIMATION DU MODULE DE CISAILLEMENT (A) ET DU MODULE D’ELASTICITE ISOSTATIQUE (B) DE LA
MATRICE VIDE EN UTILISANT LES DIFFERENTES METHODES D'HOMOGENEISATION PRESENTEES EN SECTION 3.
...................................................................................................................................................................... 68
FIGURE 36 : ESTIMATION DE LA VITESSE DES ONDES LONGITUDINALES SELON LE MODELE DE BIOT @ 600 MHZ ET
COMPARAISON AVEC LES MESURES EFFECTUEES PAR DA FONSECA. ............................................................. 68
FIGURE 37 : COMPARAISON DE LA VITESSE DE PROPAGATION DES ONDES LONGITUDINALES SELON LE MODELE DE
BIOT A 20 MHZ ET 600 MHZ. ....................................................................................................................... 69
FIGURE 38 : SCHEMA DE PRINCIPE DE LA METHODE D'INSERTION-SUBSTITUTION. LE SIGNAL REF(T) EST MESURE
SANS ECHANTILLON ET LE SIGNAL S(T) EST MESURE AVEC L’ECHANTILLON. ................................................ 77

xi
FIGURE 39 : MODELISATION ET SIMULATION AVEC DES TRANSDUCTEURS A 50MHZ DU SIGNAL TEMPOREL DE LA
REFERENCE (EN VERT) ET DU SIGNAL TRAVERSANT L'ECHANTILLON DANS LE CAS D'UNE PLAQUETTE DE
SILICIUM GRAVEE (EN BLEU), DONT LA COUCHE POREUSE EST D’EPAISSEUR 300µM ET AVEC UNE POROSITE DE
60%. ............................................................................................................................................................. 80
FIGURE 40 : SIMULATION AVEC DES TRANSDUCTEURS A 20MHZ DU SIGNAL TEMPOREL DE LA REFERENCE (EN
VERT) ET DU SIGNAL TRAVERSANT L'ECHANTILLON DANS LE CAS D'UNE PLAQUETTE DE SILICIUM GRAVEE (EN
BLEU), DONT LA COUCHE POREUSE EST EPAISSE DE 300µM ET AVEC UNE POROSITE DE 60%. ........................ 83
FIGURE 41 : DISPOSITIF EXPERIMENTAL UTILISE POUR LES MESURES EFFECTUEES EN INSERTION-SUBSTITUTION. . 84
FIGURE 42 : SIGNAL TEMPOREL ENREGISTRE DANS LE CAS DE L'ECHANTILLON 3................................................... 85
FIGURE 43 : TRANSFORMEES DE HILBERT NORMALISEES DU SIGNAL DE REFERENCE ET DU SIGNAL APRES
TRAVERSEE DE L'ECHANTILLON 3. LES MESURES DES TEMPS SONT EFFECTUEES A UNE VALEUR SEUIL DE 10%.
...................................................................................................................................................................... 85
FIGURE 44 : EVOLUTION DE LA VITESSE EFFECTIVE MESUREE AVEC LA PROFONDEUR DE GRAVURE POUR UN TAUX
DE POROSITE ENTRE 35% ET 40%. EST FIXEE A 4975 M/S, EN FONCTION DE L’EPAISSEUR DE LA
COUCHE POREUSE. ......................................................................................................................................... 86
FIGURE 45 : EVOLUTION DES AMPLITUDES EN FONCTION DE L'EPAISSEUR DE COUCHE POREUSE SANS PRISE EN
COMPTE DE LA FAIBLE EPAISSEUR DE LA COUCHE POREUSE (VERT) ET EN UTILISANT LA THEORIE DES LIGNES
DE TRANSMISSION (BLEU).............................................................................................................................. 88
FIGURE 46 : EVOLUTION DE L'AMPLITUDE CORRIGEE (EN DB) EN FONCTION DE L'EPAISSEUR DE LA COUCHE
POREUSE. LA PENTE DE L'INTERPOLATION LINEAIRE CORRESPOND AU COEFFICIENT D'ATTENUATION (EN DB).
...................................................................................................................................................................... 88
FIGURE 47 : COMPARAISON DE L'ENVELOPPE DU SIGNAL AU TRAVERS DE L'ECHANTILLON 4 (EN BLEU POINTILLE)
AVEC LE SIGNAL SIMULE (EN VERT) APRES 100000 ITERATIONS. ................................................................... 92
FIGURE 48 : TRAIN D'IMPULSION OBTENU GRACE A LA DECONVOLUTION, APRES 100000 ITERATIONS................... 92
FIGURE 49 : MODELISATION D'UNE ONDE AU TRAVERS D'UN MATERIAU BICOUCHE. .............................................. 94
FIGURE 50 : OPTIMISATION D'UN SYSTEME PAR INVERSION. .................................................................................. 96
FIGURE 51 : EXEMPLE DE CARTOGRAPHIE DES SOLUTIONS DANS LE CAS D'UNE PLAQUETTE DE SILICIUM GRAVEE. 97
FIGURE 52 : TRAITEMENT DES DONNEES LORS DE L'INVERSION DU PROBLEME. ..................................................... 98
FIGURE 53 : PRINCIPE DE L'OPTIMISATION EN UTILISANT UN ALGORITHME GENETIQUE. ........................................ 99
FIGURE 54 : EVOLUTION DU DOMAINE DE RECHERCHE A B CONSTANT A 1,4 (A GAUCHE) ET A T/TMUT CONSTANT A
0,5 (A DROITE). ............................................................................................................................................ 101
FIGURE 55 : EVOLUTION DE LA VALEUR DE FITNESS EN FONCTION DE LA DISTANCE ENTRE LES SPECTRES SELON LA
VALEUR DU PARAMETRES . ....................................................................................................................... 102
FIGURE 56 : COMPARAISON DES VITESSES OBTENUES DANS LA COUCHE POREUSE SELON LE MODELE DE BIOT
(TRAIT CONTINU ROUGE) ET AVEC LA RELATION SIMPLIFIEE (TRAIT POINTILLE BLEU). ............................... 104
FIGURE 57 : EVOLUTION DE L'IMPEDANCE ACOUSTIQUE EN FONCTION DE LA POROSITE. ..................................... 104
FIGURE 58 : SIGNAUX TEMPORELS DES ONDES AYANT TRAVERSE L'ECHANTILLON 1 (EN BAS) ET 2 (EN HAUT). ... 106
FIGURE 59 : COMPARAISON DES SPECTRES EXPERIMENTAUX (CROIX ROUGES) ET 500 GENERATIONS
D’OPTIMISATION (TRAIT CONTINU NOIR) POUR LES ECHANTILLONS 1 (DROITE) ET 2 (GAUCHE). ................. 108

xii
FIGURE 60 : COMPARAISON DU SPECTRE EXPERIMENTAL (CROIX ROUGES) ET DU SPECTRE OPTIMISE APRES 500
GENERATIONS (EN TRAIT CONTINU) POUR L’ECHANTILLON 7. ..................................................................... 111
FIGURE 61 : COMPARAISON DU SPECTRE EXPERIMENTAL (CROIX ROUGES) ET DU SPECTRE OPTIMISE APRES 500
GENERATIONS (TRAIT CONTINU NOIR) POUR L’ECHANTILLON 8. ................................................................. 112
FIGURE 62 : COMPARAISON DE LA RELATION − AVEC LES VALEURS EXPERIMENTALES. ...................... 113
FIGURE 63 : MODELISATION MULTICOUCHE DE LA PARTIE POREUSE DE LA PLAQUETTE. ..................................... 114

xiii
Liste des tableaux
TABLEAU 1 : LARGEUR DE LA BANDE INTERDITE ET DISTANCE INTERATOMIQUE POUR LES ELEMENTS DE LA
COLONNE IV AYANT UNE STRUCTURE CRISTALLINE DE TYPE DIAMANT. ....................................................... 12
TABLEAU 2 : LISTE NON EXHAUSTIVE DE SEMI-CONDUCTEURS CLASSES SELON LEUR GROUPE ET LEUR SYSTEME. 13
TABLEAU 3 : CLASSIFICATION DES MATERIAUX POREUX SELON L'UIPAC. ............................................................ 21
TABLEAU 4 : COMPARAISON DES DIFFERENTES METHODES DE CARACTERISATION. ............................................... 34
TABLEAU 5 : DESCRIPTION DES ECHANTILLONS GRAVES AU COURS DE LA THESE : COMPARAISON DES VALEURS
ATTENDUES ET MESUREES EN FONCTION DES CONDITIONS DE GRAVURE. ...................................................... 39
TABLEAU 6 : FORMULATION DES FONCTIONS ET SELON LA FORME DES PORES CONSIDERES. ................ 64
TABLEAU 7 : CONSTANTES MECANIQUES DU SILICIUM (100) ET DE L’EAU A 20°C. ................................................ 67
TABLEAU 8 : CARACTERISTIQUES ACOUSTIQUES DE L'EAU, DU SILICIUM CRISTALLIN (100) ET DU SILICIUM POREUX
A 20°C. ......................................................................................................................................................... 80
TABLEAU 9: PARAMETRES EPAISSEUR ET POROSITE DES ECHANTILLONS 1 A 4. ..................................................... 84
TABLEAU 10 : VALEURS DES RETARDS MESURES ET LES VITESSES EFFECTIVES CORRESPONDANTES. .................... 86
TABLEAU 11 : BORNES DES PARAMETRES POUR LA VALIDATION SUR L'ALUMINIUM . ........................................... 106
TABLEAU 12 : CONVERGENCE DE L'ALGORITHME EN FONCTION DU NOMBRE DE GENERATIONS. ......................... 107
TABLEAU 13 : VALEURS DES PARAMETRES ACOUSTIQUES ESTIMES PAR INVERSION DU PROBLEME. .................... 108
TABLEAU 14 : DESCRIPTION DES ECHANTILLONS UTILISES DANS LA METHODE FREQUENTIELLE. ........................ 109
TABLEAU 15 : BORNES DES PARAMETRES DE LA COUCHE POREUSE. .................................................................... 110
TABLEAU 16: RESULTAT DE L'OPTIMISATION POUR L'EPAISSEUR DE LA COUCHE POREUSE ET COMPARAISON AVEC
LES MESURES DESTRUCTIVES. ..................................................................................................................... 111
TABLEAU 17 : RESULTAT DE L'INVERSION DU MODELE POUR LA POROSITE ET COMPARAISON AVEC LA METHODE
DESTRUCTIVE. ............................................................................................................................................. 113
TABLEAU 18 : VALEURS DES PARAMETRES DU MODELE MULTICOUCHE APRES OPTIMISATION POUR LES
DIFFERENTES FONCTIONS D'INTERPOLATION ET RAPPEL DES RESULTATS DE LA MESURE DESTRUCTIVE. ..... 115

Introduction
1
Introduction

Introduction
2
Le silicium poreux est un matériau qui est de plus en plus utilisé, notamment en
microélectronique et en biologie, grâce à ses propriétés remarquables et ses procédés de
fabrication assez simples.
L’industrialisation du silicium poreux est cependant limitée par le manque de
reproductibilité des méthodes actuellement utilisées pour sa fabrication. En effet, les
caractéristiques finales sont très dépendantes des conditions de gravures et il est difficile de
prévoir avec précision la porosité et la profondeur de la gravure. Afin de permettre une
amélioration de la reproductibilité de la gravure, une méthode de contrôle non destructif est
nécessaire. Le but de ce travail est de répondre à ce besoin en mettant au point une méthode
qui permette un suivi de la gravure in situ en temps réel.
La caractérisation non destructive s’est largement développée ces dernières décennies
afin de pouvoir contrôler la fiabilité d’une pièce ou l’évolution de ses propriétés sans la
détruire. Les nombreuses méthodes de caractérisation non destructive développées sont
maintenant classées par les normes EN 473 et EN 4179.
La méthode la plus ancienne et la plus utilisée est l’inspection visuelle des matériaux,
qui permet d’obtenir de nombreuses informations grâce à l’observation de chocs ou de
fissures au niveau de la surface. Cependant cette méthode est limitée par la résolution de l’œil
(qui peut cependant être magnifié) et par la non-pénétration des ondes lumineuses dans la
plupart des matériaux. Afin d’améliorer la résolution au niveau de la surface, le ressuage peut
être utilisée. Cette méthode permet de révéler des défauts surfaciques de l’ordre du micron.
Afin de permettre la caractérisation du volume de l’échantillon, trois groupes de
méthodes se sont développées : les méthodes électromagnétiques, les méthodes magnétiques
et les méthodes ultrasonores.

Introduction
3
Les méthodes électromagnétiques sont basées sur l’émission d’une onde
électromagnétique dont les propriétés vont être modifiées lors de son passage dans
l’échantillon. La méthode la plus connue et encore très couramment utilisée en industrie est
l’imagerie par rayons X. Cette méthode s’est étendue à d’autres gammes de fréquence, tels
que la FTIR (Fourier Transform Infra-Red) qui est basée sur le rayonnement infrarouge.
Cependant certains matériaux sont très atténuants aux gammes de fréquences utilisées, ce qui
limite les mesures en transmission. Enfin les ondes électromagnétiques peuvent causer des
dommages aux échantillons, dans le cas de matériaux organiques ou de semi-conducteurs et
peuvent présenter des dangers pour les opérateurs, notamment dans les bandes gamma et X.
Les méthodes magnétiques observent la réponse d’un échantillon à un champ
magnétique intense. Les deux méthodes couramment utilisées sont les courants de Foucault et
la magnétoscopie. Cependant ces méthodes nécessitent un matériau conducteur ou
ferromagnétique pour permettre l’observation volumique de l’objet considéré, ce qui limite
leur champ d’application.
Les méthodes ultrasonores étudient la propagation des ondes ultrasonores au sein d’un
matériau afin d’en extraire des informations sur les caractéristiques mécaniques. Elles ne
mettent pas en œuvre de rayonnements ionisants, permettent une pénétration importante
(selon la fréquence utilisée) et peuvent être appliquées à tous les types de matériaux,
contrairement aux méthodes magnétiques.
Les matériaux étudiés au cours de cette thèse sont le silicium poreux et le silicium
cristallin. Ainsi les méthodes magnétiques ne peuvent être utilisées car ces matériaux sont des
semi-conducteurs, à grand band-gap, voire isolant dans le cas du silicium poreux. Les
méthodes électromagnétiques ont déjà été utilisées pour l’étude de ce type de matériaux, mais
elles présentent actuellement de nombreuses limitations, dues à la taille des pores et à
l’épaisseur de la couche de silicium poreux. L’avantage des méthodes ultrasonores pour ce
type de matériau est sa capacité à recueillir les informations mécaniques de la couche poreuse,
ainsi que son épaisseur, en choisissant la fréquence adaptée. Plus l’épaisseur sera importante,
plus la fréquence devra être faible, ce qui limitera en conséquence la résolution spatiale.
La caractérisation de matériaux par méthodes ultrasonores a été mise en pratique pour
la première fois en 1929 afin de détecter des fissures au sein d’un matériau [1]. Cette méthode
est alors effectuée en transmission. En 1940, Firestone développe la méthode pulse-écho, qui

Introduction
4
consiste à envoyer une impulsion de courte durée afin de pouvoir mesurer les différents
signaux de l’onde ultrasonore au sein de l’échantillon [2].
Les mesures ultrasonores peuvent se faire en transmission ou en réflexion. Dans le cas
de la réflexion, les transducteurs émetteur et récepteur sont du même coté de l’échantillon, ce
qui permet de pouvoir tester des échantillons dont les deux faces ne sont pas accessibles. Cela
est particulièrement intéressant dans le cadre de canalisations par exemple. Cependant une
mesure de référence est alors difficile à effectuer et des valeurs relatives d’amplitude sont
mesurées, les temps de vols n’étant pas affectés. Dans le cas de la transmission, les
transducteurs sont disposés de chaque coté de l’échantillon et l’onde ultrasonore traverse ce
dernier. L’avantage de cette méthode est la possibilité de faire des mesures d’amplitude de
façon absolue, en comparant le signal avec une référence lorsque la mesure est faite en
immersion, ce qui est le cas de cette étude.
Dans le cas d’une mesure en immersion, le ou les transducteurs ainsi que l’échantillon
sont immergés dans un fluide, le plus souvent de l’eau, afin de permettre une bonne
propagation des ondes ultrasonores. Des méthodes utilisant l’air comme milieu de
propagation existent mais l’énergie transmise à l’échantillon est alors beaucoup plus faible et
la fréquence de fonctionnement des transducteurs est limitée par l’atténuation de l’air. Le
fluide ne changeant pas entre les mesures, il est possible de comparer de manière simple les
caractéristiques acoustiques de plusieurs échantillons. De plus, il n y a pas de contact entre la
sonde et l’échantillon étudié, ce qui peut être intéressant dans le cadre de la microélectronique
pour éviter des contaminations.
Dans ce travail, une méthode de caractérisation ultrasonore du silicium poreux est
développée. Elle a pour objectif de permettre la détermination simultanée de deux paramètres
de la couche poreuse : la porosité moyenne et la profondeur de gravure. Pour cela, une étude
de la propagation des ultrasons au sein d’un matériau bicouche Si-Si poreux est nécessaire. De
plus, le but de cette étude étant le suivi en temps réel de la gravure, le système proposé devra
pouvoir s’intégrer au sein d’une cuve de gravure électrochimique.
Dans le premier chapitre, les principes de la gravure électrochimique du silicium
poreux sont présentés. Pour cela, un rappel des bases de la physique des semi-conducteurs est
effectué puis les procédés de fabrication du silicium poreux, notamment ceux développés au
sein du laboratoire, sont présentés. Nous nous intéressons plus précisément au silicium

Introduction
5
mésoporeux, abondamment utilisé au laboratoire GREMAN et notamment comme substrat
pour des composants RF passifs. Le principe de la gravure du silicium poreux est décrit, puis
les différents paramètres permettant de la moduler sont explicités. Enfin, le matériel
disponible au sein du laboratoire GREMAN, ainsi que les matériaux utilisés au cours de la
thèse sont présentés et la disposition possible des transducteurs au sein de la cuve pour un
suivi en temps réel est discutée.
Dans le second chapitre, les caractéristiques et les grandeurs des matériaux poreux qui
sont utiles pour étudier la propagation des ondes acoustiques sont définis. Puis la propagation
d’une onde ultrasonore à travers une couche poreuse est étudiée. Pour cela, la détermination
des paramètres nécessaires au modèle de propagation est effectuée et appliquée à une couche
de silicium poreux.
Dans le dernier chapitre, le principe de la mesure ultrasonore appliquée au silicium
poreux ainsi qu’un court historique sont exposés. Dans un second temps, les signaux recueillis
seront traités de manière temporelle, puis fréquentielle. Dans chacun dans ces traitements, le
principe est détaillé, puis le dispositif mis en place pour la mesure est présenté et enfin les
résultats obtenus sont discutés. Une méthode originale de résolution du problème inverse,
basée sur un algorithme génétique, est mise au point et appliquée. Les résultats de cette
résolution sont comparés à ceux d’une mesure destructive et discutés en termes de
reproductibilité, précision et compatibilité avec une utilisation en temps-réel.
Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
6
Chapitre 1 : Gravure
Electrochimique Du Silicium Poreux

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
7
La découverte du silicium poreux en 1956 par Uhlir est fortuite [3]. Lors d’une étude
d’électropolissage dans une solution d’acide fluorhydrique, il observa en effet l’apparition
d’une couche brunâtre au lieu d’observer un polissage du silicium. Il attribua initialement cela
à la formation d’un oxyde. Cette observation a été par la suite confirmée par d’autre
chercheurs, et en 1957 une analyse plus approfondie de cette couche par Fuller et
Ditzenberger a permis d’observer la structure poreuse du silicium [4].
Ce matériau fut tout d’abord étudié dans les années 70 et 80 pour ses propriétés
d’isolant électrique, la largeur de la bande interdite (ou band gap) augmentant avec la
porosité, et pour sa capacité à bloquer les impuretés (gettering) [5], [6]. Cependant, le nombre
de publications reste encore faible. En 1978, le silicium poreux intègre le monde industriel
pour la première fois pour la formation de caissons d’isolation [7], [8].
La découverte de ses propriétés électroluminescentes en 1984 [9] relance
l’engouement pour le silicium poreux dans la communauté scientifique. En effet, une
photoluminescence dans le domaine visible est observée à une température de 4.2°K. Les
premières explications de ce phénomènes seront donnés dans les années 1990-91, par les
travaux de Streetman, Canham et Lehmann sur le confinement quantique [10], [11], [12].
Grâce à ces recherches, la première diode électroluminescente basée sur du silicium poreux
est fabriquée en 1996 [13], [14].
Cependant une oxydation rapide du silicium poreux, due à sa surface active
développée très importante, a été observée. Ainsi un décalage vers le bleu (blue shift) ou le
rouge (red shift) de la photoluminescence est rapidement observé [15], [16]. L’intérêt pour le
silicium poreux s’est maintenu grâce à une diversification importante des domaines de
recherches. Ainsi il est maintenant utilisé ou étudié pour réaliser des vias en
microélectronique [17], des substrats pour des composants RF [18], [19], des capteurs de gaz
[20], des cristaux photoniques 3D [21], des membranes biologiques [22], des nanoparticules

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
8
pour la médecine [23] ou plus étonnamment des pâtes dentifrices [24] et des micro-explosifs
[25].
Dans ce chapitre, la fabrication du silicium poreux, et plus précisément du silicium
mésoporeux, est présentée. Pour cela, le principe de la gravure du silicium poreux est décrit,
puis les différents paramètres permettant de moduler la gravure du silicium sont explicités.
Enfin le matériel disponible au sein du laboratoire GREMAN, ainsi que les matériaux utilisés
au cours de la thèse sont présentés.
1 Principe de la gravure du silicium poreux
La fabrication du silicium poreux en voie humide a été largement étudiée et peut
actuellement être regroupée en deux méthodes principales : la dissolution chimique ou
l’anodisation du silicium.
La dissolution chimique, ou « stain etching », a lieu lorsque le silicium est plongé dans
un bain d’acide fluorhydrique () avec un oxydant, le plus souvent de l’acide nitrique
( ) [26]. Le silicium est alors attaqué par l’acide fluorhydrique et la formation de
silicium poreux est observée. Les épaisseurs obtenues par cette méthode sont faibles,
comprise entre 1 et 25 nm. Ainsi cette méthode est très utilisée pour la fabrication de films
minces de silicium poreux. Ces conditions de gravure peuvent aussi être créées en phase
vapeur, ce qui permet de recréer cette réaction en voie sèche [27].
Afin d’obtenir des épaisseurs plus importantes, il est nécessaire d’utiliser la gravure
électrochimique, qui permet l’anodisation du silicium. Seule cette méthode est présentée par
la suite. La gravure électrochimique est permise par l’application d’un courant anodique au
système Si/HF. La progression de la gravure suit généralement les lignes du champ électrique
induit par le courant traversant et une gravure anisotrope du silicium est alors observée.
Afin de comprendre les phénomènes mis en jeu lors de la gravure électrochimique du
silicium, les bases de la physique des semi-conducteurs sont abordées. Puis, l’interface entre
un semi-conducteur et une solution contenant de l’acide fluorhydrique est présentée. En
observant la caractéristique courant-tension, les différents régimes de gravure sont décris et
les réactions ayant lieu au niveau de l’interface sont étudiées.

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
9
1.1 Bases de la physique des semi-conducteurs
Dans cette partie, la théorie des bandes et le comportement des semi-conducteurs sont
présentés. Une attention plus particulière sera portée sur le silicium, qui sera le matériau
utilisé dans la thèse.
1.1.1 Théorie des bandes
La théorie des bandes modélise les états d’énergie qui peuvent être occupés par les
électrons dans le cadre d’un solide [28]. En effet, si les électrons libres peuvent prendre tous
les états d’énergies positifs, cela n’est plus le cas s’il est lié à un ou plusieurs atomes. Les
états d’énergie deviennent discrets et la valeur de ces états est dépendante de l’environnement
de l’électron.
Lorsqu’un électron est lié à un atome isolé, ses états d’énergie possibles sont définis
par les orbitales atomiques. Ces orbitales sont décrites par la couche d’électrons, la forme des
orbitales et le moment magnétique ou spin. Le nombre quantique principal renvoie ainsi à la
nième couche d’électrons et le nombre azimutal décrit la forme de l’orbitale. Les lettres (sharp), (principal), (diffuse) et (fundamental) sont couramment utilisées pour
remplacer l’écriture numérique du nombre azimutal.
Lorsque plusieurs atomes sont voisins, un échange d’un ou plusieurs électrons entre
les atomes peut être effectué afin de baisser l’énergie globale du système. Deux cas extrêmes
peuvent être décrits : la liaison covalente et la liaison ionique. Dans le cas de la liaison
covalente un ou plusieurs électrons sont partagés en les atomes alors que dans le cas d’une
liaison ionique, un ou plusieurs électrons sont accaparés par un des atomes. La plupart des
liaisons ne sont ni purement covalentes ni purement ioniques mais une combinaison des deux.
Dans le cas particulier où un cristal est formé que d’une espèce, aucune liaison ionique ne
peut apparaitre car tous les atomes ont la même électronégativité. Toutes les liaisons sont
alors covalentes.
Les états intermédiaires d’énergie induits par ces liaisons permettent d’augmenter le
nombre d’états discrets. Lorsque le nombre d’atomes devient important, comme dans le cas
d’un solide (de l’ordre de 1023 at.cm-3), les états discrets deviennent tellement nombreux
qu’ils forment des pseudo-continuums, appelés bande d’énergie (cf Figure 1).

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
10
Figure 1 : Niveau d'énergie des électrons dans le cas d'un atome isolé, de 5 atomes liés et d’un solide.
La bande de valence (BV) correspond aux différents états possibles des électrons dans
le cadre de liaisons, covalentes ou ioniques. La bande de conduction (BC) correspond aux
états possibles des électrons pouvant être libérés des liaisons et pouvant se mouvoir sous
l’action d’un champ électrique. Selon la nature du matériau, les bandes BV et BC peuvent
partiellement se recouvrir ou être séparées. Lorsqu’elles sont séparées, la bande intermédiaire
est appelées bande interdite et correspond à des états d’énergie impossibles pour les électrons.
Sa largeur est notée EG.
Figure 2 : Bandes d'énergie en fonction de la distance interatomique pour les éléments de la colonne IV du tableau de
Mendeleïev pour une structure diamant.
La Figure 2 montre la variation des bandes d'énergie en fonction de la distance
interatomique pour une forme cristalline, plus précisément la structure dite diamant. Les
bandes BC et BV varient fortement en fonction de la distance interatomique. Ainsi une forme

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
11
cristalline présentant une bande interdite à la distance d0 n’en présente plus à la distance d1. A
partir d’une certaine distance di, on observe un atome isolé et les états d’énergie possibles sont
alors de nouveau limités aux orbitales s, p, d et f. La distance interatomique dans un solide est
liée à la température dudit solide [29]. Ainsi une augmentation de la température provoquant
une augmentation de la distance interatomique, le band gap d’un cristal, formé d’une même
espèce et conservant sa structure cristalline, va diminuer avec la température.
Figure 3 : Evolution du band gap en fonction de la température dans la gamme 0-300°K dans le cas du silicium [30].
1.1.2 Conducteurs, isolants et semi conducteurs : définitions
Le comportement électrique des matériaux peut être expliqué à partir de la théorie des
bandes. Un matériau dont la largeur de la bande interdite est importante nécessitera un apport
d’énergie important pour qu’un électron passe de la bande de valence à la bande de
conduction, empêchant ainsi la conduction d’un courant électrique. Ces matériaux vont donc
naturellement limiter fortement la conduction du courant et sont dits isolants. Inversement un
matériau dont les bandes de conduction et de valence sont enchevêtrées ne nécessite que peu
ou pas d’énergie pour l’établissement d’un courant électrique car les électrons peuvent
librement passer de la bande de valence à la bande de conduction. Ces matériaux sont dits
conducteurs. Lorsque la bande interdite existe mais que sa largeur permet d’obtenir le passage
d’électrons de la bande de valence à la bande de conduction avec une probabilité relativement
élevée, les matériaux sont appelés semi-conducteurs.
Le Tableau 1 regroupe quelques exemples de matériaux faisant partie de la colonne IV
du tableau périodique et ayant donc la même structure électronique sur leurs dernières
couches. Ces matériaux ont la même structure cristalline mais une distance interatomique
variable. Ainsi le diamant, qui est à base de carbone, est un semi-conducteur à grand gap car
la distance interatomique est faible. Le Silicium (Si) et le Germanium (Ge) ont pour leurs

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
12
parts des bandes interdites de taille intermédiaire et ont donc un comportement semi-
conducteur. Le Plomb, qui appartient aussi à la colonne IV, est quant à lui un très bon
conducteur, même si sa structure diffère de celle du diamant.
Tableau 1 : Largeur de la bande interdite et distance interatomique pour les éléments de la colonne IV ayant une
structure cristalline de type diamant.
Atome Largeur de la bande
interdite @ 300°K (eV) Type de matériau
Distance
interatomique @
300°K (Â)
Carbone (C) 5.5 [31] Isolant 2.07 [32]
Silicium (Si) 1.11 [10] Semi-conducteur 2.35 [32]
Germanium
(Ge) 0.67 [10] Semi-conducteur 2.44 [32]
La théorie des bandes permet aussi d’expliquer la variation de la conductivité en
fonction de la température, comme montré sur la Figure 4. Ainsi les conducteurs ont une
conductivité qui décroit de façon linéaire en fonction de la température alors que les isolants
et les semi conducteurs ont une conductivité croissante, suivant une loi exponentielle [33].
Cette croissance est due à l’augmentation de la population d’électrons intrinsèques par
génération thermique. A contrario, les conducteurs observent une augmentation des
interactions entre électrons et atomes par agitation thermique, ce qui diminue leurs
conductivités.
Figure 4 : Evolution de la conductivité en fonction de la température selon que le matériau soit conducteur, isolant ou
semi-conducteur.

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
13
1.1.3 Propriétés des semi-conducteurs
Le Tableau 2 présente une liste non exhaustive des semi-conducteurs actuellement
utilisés en microélectronique, les semi-conducteurs utilisés au sein du laboratoire étant listés
en rouge. Les semi-conducteurs de la colonne IV ont la particularité d’avoir leurs couches de
valence exactement à moitié remplies, ce qui permet de créer des cristaux constitués d’une
seule espèce (Ge et Si).
Tableau 2 : Liste non exhaustive de semi-conducteurs classés selon leur groupe et leur système.
Colonne du tableau périodique Semi-conducteur
IV Ge, Si
Binaire SiC
III-V Binaire GaAs, GaP, GaSb, InAs, InP, InSb, GaN
Ternaire AlxGa1-xAs, GaAsxP1-x
Quaternaire AlxGa1-xAsyP1-y
II-VI Binaire CdS, HgTe, CdTe, ZnTe, ZnS, ZnO
Ternaire CdxHg1-xTe
Cependant la très grande majorité des dispositifs à base de semi-conducteurs sont à
base de silicium (Si), les autres semi-conducteurs répondant à des besoins spécifiques. Ainsi
seul le silicium sera étudié par la suite.
Le Silicium a pour nombre atomique la valeur 14. Ainsi 14 électrons sont liés à son
noyau lorsque l’atome est isolé. Sa configuration électronique est donc 3!3!, suivant
la règle de Klechkowsky. Afin d’obtenir le maximum de stabilité, il lui faut donc faire quatre
liaisons afin d’atteindre la structure électronique de l’Argon.
A la température du zéro absolu, toutes les liaisons covalentes sont effectuées et aucun
électron ne peut atteindre la bande de conduction. Il est alors un isolant parfait. En
augmentant la température, l’agitation thermique va permettre aux électrons de pouvoir
quitter la bande de valence. A l’emplacement où se trouvait l’électron va se former un trou,
noté ℎ#, qui correspond à un manque d’électron. Il peut alors se mouvoir de proche en proche
en brisant les liaisons voisines (cf Figure 5).

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
14
Figure 5: Présentation du concept de trous et d’électrons libres dans un semi-conducteur [34].
Les concentrations des trous, notée p, et des électrons, notée n, sont égales et notées $ dans le cas d’un semi-conducteur pur, ou intrinsèque. Cette valeur est dépendante de la
température [35]. Ainsi à une température de 300°K, la valeur pour le Silicium est d’environ 1 ∗ 10()*+,. Afin d’augmenter la concentration des porteurs de charge, il est possible de
« doper » le semi-conducteur en substituant des atomes de silicium par des atomes des
colonnes voisines. Les deux types de dopages sont alors qualifiés de types p ou n.
Afin de créer un dopage de type p, l’atome de substitution doit appartenir à la colonne
III du tableau périodique. Les atomes composant cette colonne ont une couche de valence
composée de trois électrons de valence. L’atome le plus souvent utilisé en microélectronique
est le Bore (B). Lors de son intrusion au sein du réseau cristallin formé par le Silicium, trois
liaisons covalentes sont crées laissant un des quatre atomes de silicium voisins sans liaison (cf
Figure 6), formant ainsi un trou par implantation d’un atome de Bore. Si le dopant est
judicieusement choisi, l’énergie nécessaire au trou pour se mouvoir est faible, ce qui permet la
mobilité du trou au travers du réseau cristallin. Les trous sont alors en excès et deviennent les
porteurs de charges majoritaires. La concentration d’atomes dopant de type p est notée NA.
Figure 6 : Dopage d'un semi-conducteur par un atome de Bore. Le trou devient alors libre et la charge correspondant
à l’atome de Bore ionisé est fixe [34].

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
15
Afin de créer un dopage de type n, l’atome de substitution doit appartenir à la colonne
V du tableau périodique. L’atome aura alors cinq électrons de valence. Les atomes les plus
souvent utilisés sont le Phosphore (P) et l’Arsenic (As). Lors de son intrusion au sein du
réseau cristallin formé par le Silicium, quatre liaisons sont formées avec ses quatre atomes
voisins et un électron reste libre (cf Figure 7). Ainsi un électron libre est formé par
l’implantation de chaque atome de la colonne V. Les électrons sont alors en excès et
deviennent les porteurs de charges. La concentration d’atomes dopants de type n est notée ND.
Figure 7 : Dopage d'un semi-conducteur par un atome de Phosphore. L’électron devient alors libre et la charge du
Phosphore est fixe [34].
Malgré le fait que des charges fixes et mobiles soient présentes, le semi-conducteur
reste globalement neutre, ce qui implique l’égalité suivante :
+ . = + 0 (1)
La distribution des électrons au sein d’un solide est donnée par la fonction de
distribution de Fermi-Dirac :
123 = 45,5678 + 1 (2)
Où EF est appelé niveau de Fermi. Ce niveau correspond à l’équiprobabilité de la
distribution des électrons au sein des bandes de valence et de conduction. Dans le cas d’un
semi-conducteur, ce niveau est toujours dans la bande interdite si le niveau de dopage
demeure inférieur à quelques 1019 cm-3.
Dans le cadre d’un semi-conducteur intrinsèque, on peut définir le niveau de Fermi
intrinsèque EFi, qui correspond à la moyenne arithmétique du maximum de la bande de
Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
16
valence EV et du minimum de la bande de conduction EC. Dans le cas d’un semi-conducteur
dopé, on peut considérer que les concentrations des accepteurs NA et donneurs ND sont égales
respectivement aux concentrations de trous p et d’électrons n. Le niveau de Fermi peut alors
être exprimé à partir de la concentration des porteurs de charges :
29 = 2: − ;< =:0> ?@ABCD
29 = 2E + ;< =E.> ?@ABC
(3)
Où : et E sont les densités équivalentes d’état respectivement dans la bande de
conduction et de valence, ; est la constante de Boltzmann et < est la température en Kelvin.
Ainsi le niveau de Fermi est inférieur à EFi dans le cas de semi-conducteurs de type p et
supérieur dans le cas de type n.
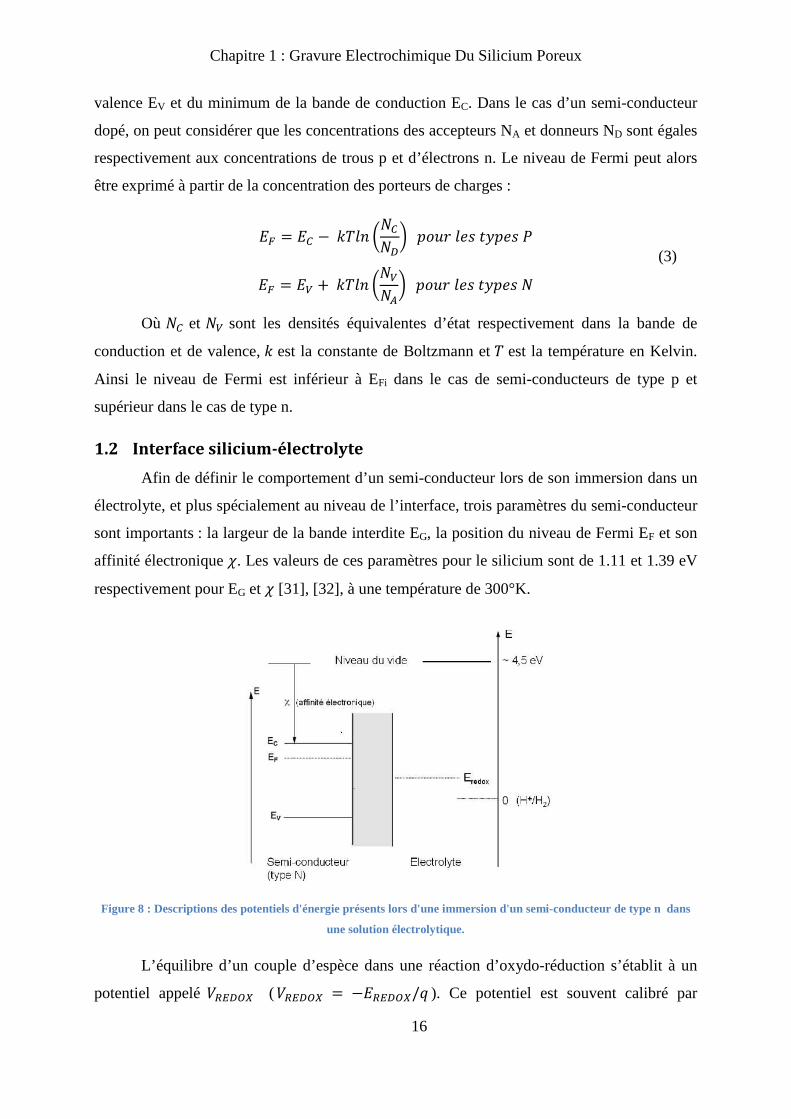
1.2 Interface silicium-électrolyte
Afin de définir le comportement d’un semi-conducteur lors de son immersion dans un
électrolyte, et plus spécialement au niveau de l’interface, trois paramètres du semi-conducteur
sont importants : la largeur de la bande interdite EG, la position du niveau de Fermi EF et son
affinité électronique F. Les valeurs de ces paramètres pour le silicium sont de 1.11 et 1.39 eV
respectivement pour EG et F [31], [32], à une température de 300°K.
Figure 8 : Descriptions des potentiels d'énergie présents lors d'une immersion d'un semi-conducteur de type n dans
une solution électrolytique.
L’équilibre d’un couple d’espèce dans une réaction d’oxydo-réduction s’établit à un
potentiel appelé GH50IJ (GH50IJ = −2H50IJ/L ). Ce potentiel est souvent calibré par

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
17
rapport à une sonde au calomel saturée en chlorure de potassium (MN), correspondant au
couple redox O!N!1P3 O⁄ . Il est situé à 0.248V par rapport à l’électrode normale à
hydrogène.
Les différents niveaux d’énergie correspondant à l’électrolyte et au silicium pour une
plaquette de type n sont illustrés Figure 8.
Lorsque la plaquette de silicium est plongée dans une solution d’acide fluorhydrique,
une différence de potentiel d’énergie est observée entre le niveau de Fermi EF de la plaquette
et l’énergie correspondante de la réaction d’oxydoréduction EREDOX de la solution d’acide.
Lors du rééquilibrage des potentiels d’énergie, un échange de charge entre le silicium et
l’électrolyte est observé à l’interface entre ces deux milieux et une Zone de Charge d’Espace
(ZCE) est formée (cf Figure 9). L’épaisseur de la ZCE varie entre quelques nanomètres, dans
les cas d’accumulation et d’inversion, à quelques micromètres, dans le cas de déplétion. De la
même manière, une couche d’accumulation de charge, appelée couche de Helmholtz, est
observée dans l’électrolyte. La présence de zones désertées dans le semi-conducteur va
conditionner le passage du courant, et donc la morphologie finale su silicium poreux.
Figure 9 : Différents états de charge possibles dans un semi-conducteur plongé dans un électrolyte, cas du type n et du
type p.

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
18
1.3 Caractéristique courant-tension
La Figure 10 présente les allures typiques des caractéristiques courant-tension
lorsqu’une plaque de silicium est plongée dans une solution d’acide fluorhydrique. Dans le
cas de substrats de type p, 4 régimes peuvent y être observés en anodique :
Figure 10 : Allures types des courbes courant-tension dans le cas de type p (a) et de type n (b), d’après [36].
• La première zone est une région de potentiel en circuit ouvert. La valeur dudit
potentiel, notée UOCP, dépend de l’orientation cristalline du silicium, du type de
dopage et de son intensité, de la concentration en HF de la solution ainsi que de
l’illumination [37].
• La seconde zone est une zone de courant anodique, où une réaction est initiée par
l’arrivée d’un trou à l’interface SI/HF et l’injection d’un électron. Dans le cas du
silicium de type P, l’interface se comporte comme une diode de type Schottky

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
19
polarisée en direct et le courant évolue donc de manière exponentielle en fonction de
la tension appliquée. Dans le cas du silicium de type n, la diode est polarisée en
inverse, ce qui induit un courant faible pour les tensions inférieures à la tension dite
de claquage. Cependant en éclairant le substrat, des paires trous-électrons sont
formées. Si l’éclairement est suffisamment puissant, la caractéristique courant-tension
semblable à celle s’un type p (cf Figure 10b). La création du silicium poreux est
confinée dans cette zone. La limite supérieure de cette zone est le point (JPS, UPS ), qui
dépend de la concentration en acide fluorhydrique de l’électrolyte.
• La troisième zone est une zone où nous observons une compétition entre la formation
de silicium poreux et l’électropolissage. Cette zone est essentiellement dépendante de
la concentration de l’électrolyte en acide fluorhydrique [38].
• La quatrième zone correspond à l’électropolissage du silicium par l’acide
fluorhydrique. Cette zone se poursuit par une zone d’oscillation correspondant à la
formation successive d’un oxyde puis de sa dissolution par l’acide fluorhydrique.
1.4 Réactions chimiques à l’interface
1.4.1 Solution d’acide fluorhydrique
Lorsque le potentiel appliqué est inférieur à UOCP, la surface du silicium est passivée
par les ions H+ et un circuit ouvert est observé. Les espèces présentes dans la solution sont
alors en équilibre et leurs concentrations sont alors régies par les équilibres suivants :
↔ # + , + , ↔ !, 2 ↔ 13! (4)
Les espèces actives dans la solution dans le cadre de la gravure électrochimique sont le
fluorure d’hydrogène , son dimère 13! et l’ion bifluorure !,, qui se dissocient en
fluorure d’hydrogène et en ion fluorure , au niveau de l’interface Si/HF [39]. La
concentration totale d’espèce active NT9 dans la solution d’acide fluorhydrique est donc la
somme des concentrations de chaque espèce active, pondérée par le nombre d’atomes de fluor
présents dans l’espèce :
NT9 = + 213! + 2,! + , (5)

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
20
Les concentrations de ces espèces sont stables lorsque la concentration totale NT9 est
supérieure à 0.25 mol.L-1. Dans ce cas, les concentrations sont alors de 94% de /13!, 4% de !, et 2% de ,.
1.4.2 Formation de silicium poreux
Lorsque la densité de courant est inférieure à JPS, la réaction à l’interface Si/HF est
contrôlée par l’injection des trous. L’équation bilan peut s’écrire sous la forme suivante :
UV + 4!, + 2# + ℎ# → UVY!, + 2 + ! + , (6)
Sur le plan énergétique, 2 ℎ+ sont nécessaires : un pour briser la première liaison Si-H
et un pour absorber l’électron injecté lors de la création de la deuxième liaison Si-F. La
réaction étant limitée par la présence des trous ℎ#, la gravure s’effectue aux endroits où la
courbure est la plus forte, endroit où se concentre le champ électrique. Ainsi la formation de
pores anisotropes est observée. La concentration NT9 doit être élevée afin de permettre que la
concentration des trous reste faible, en accord avec la loi d’action de masse.
1.4.3 Electropolissage
Dans le cas d’une densité de courant supérieure à JPS, un couple de réactions a lieu au
niveau de l’interface : une formation d’oxyde et la dissolution dudit oxyde par l’acide
fluorhydrique.
La réaction d’oxydation du silicium est permise par la migration des ions hydroxydes , au niveau de l’interface. Cette migration est possible grâce à l’augmentation du
potentiel, induite par l’augmentation de la densité de courant au niveau du contact Schottky.
L’espèce active pour la formation de l’oxyde est ainsi l’ion hydroxyde , et la réaction
d’oxydation peut s’écrire ainsi :
UV + 4, + 4ℎ# → UV13Z UV13Z → UV! + 2!
(7)
Une fois cet oxyde formé, sa dissolution par l’acide fluorhydrique est effectuée selon
la réaction suivante [40] :
UV! + 6 → !UVY + 2! (8)
Dans ce couple de réaction, le facteur limitant devient le transport des ions fluorés de
l’électrolyte. Ainsi l’oxyde est préférentiellement dissout au sommet des aspérités, ce qui
permet leurs disparitions et donc le polissage de l’interface Si/HF.
Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
21
2 Influence des conditions de gravure
Dans cette partie, les éléments participant à la gravure du silicium et leur impact vont
être présentés. Ces variations peuvent être importantes, ce qui justifie la nécessité de recourir
à un suivi en temps réel de la gravure. Tout d’abord l’influence du choix de substrat ainsi que
des paramètres de gravure est présentée. Enfin les problématiques des couches épaisses seront
abordées.
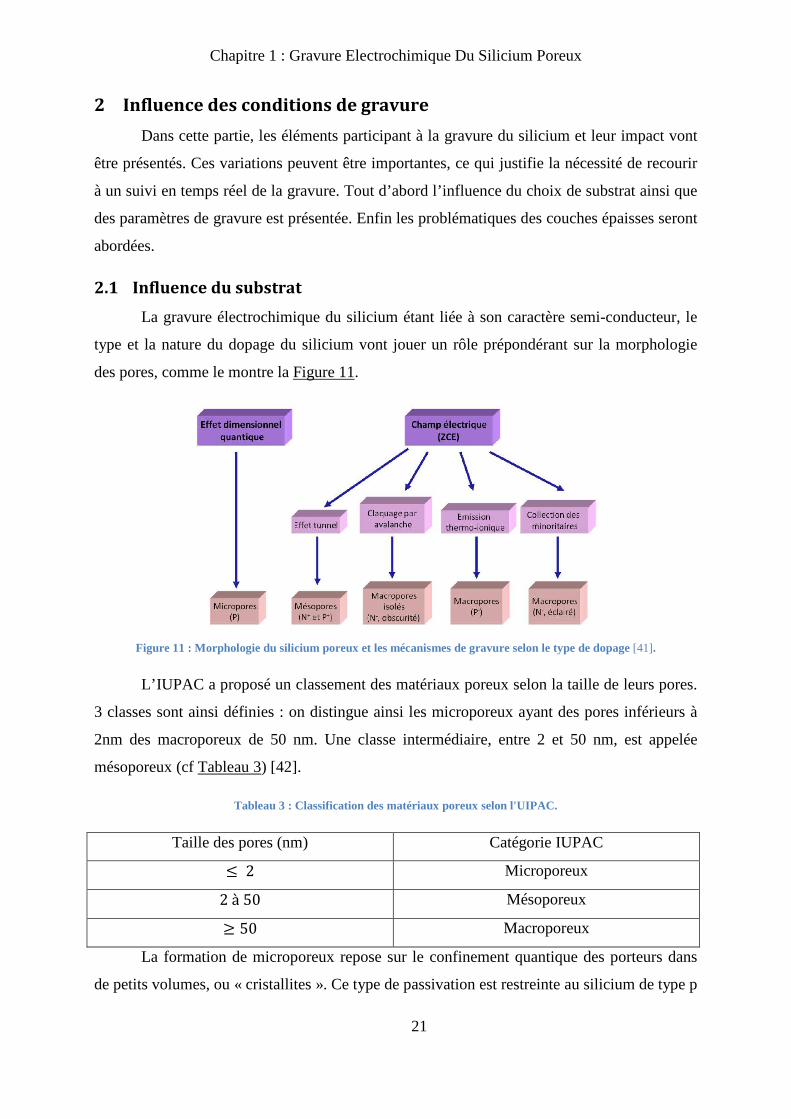
2.1 Influence du substrat
La gravure électrochimique du silicium étant liée à son caractère semi-conducteur, le
type et la nature du dopage du silicium vont jouer un rôle prépondérant sur la morphologie
des pores, comme le montre la Figure 11.
Figure 11 : Morphologie du silicium poreux et les mécanismes de gravure selon le type de dopage [41].
L’IUPAC a proposé un classement des matériaux poreux selon la taille de leurs pores.
3 classes sont ainsi définies : on distingue ainsi les microporeux ayant des pores inférieurs à
2nm des macroporeux de 50 nm. Une classe intermédiaire, entre 2 et 50 nm, est appelée
mésoporeux (cf Tableau 3) [42].
Tableau 3 : Classification des matériaux poreux selon l'UIPAC.
Taille des pores (nm) Catégorie IUPAC ≤ 2 Microporeux 2à50 Mésoporeux ≥ 50 Macroporeux
La formation de microporeux repose sur le confinement quantique des porteurs dans
de petits volumes, ou « cristallites ». Ce type de passivation est restreinte au silicium de type p

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
moyennement dopé. Les propriétés optiques de photoluminescence et d’électr
observées au sein du silicium poreux sont dues à ce confinement quantique.
La formation des autres types de poreux (méso
la ZCE mais les phénomènes de formation des pores diffèrent selon le dopage du s
Ainsi l’effet tunnel domine dans le cas de substrats fortement dopés, permettant la formation
de mésopores. Lorsque le niveau de dopage diminue, des macropores sont formés
claquage ou collection des minoritaires pour le type n
type p-.
Dans cette partie, les mécanismes de formation des matériaux fabriqués au sein du
laboratoire sont étudiés. Ainsi le cas de substrats n
substrats n+ et p+, correspondant à du
2.1.1 Macropores : exemple du type n
Lorsqu’une plaque de silicium de type n faiblement dopée est plongée dans une
solution d’acide fluorhydrique, la polarisation de la diode formée au niveau du contact
Schottky est inverse. Ainsi, le courant se propageant au travers de la ZCE est très faible, ne
permettant pas une gravure dans un temps raisonnable. Cependant en provoquant le claquage
ou en éclairant la face arrière du silicium, il est possible d’initier des courants significatifs.
La gravure dans l’obscurité nécessite la création d’un fort potentiel, supérieur à 10 V
afin d’atteindre la tension de claquage et provoquer le claquage par avalanche. Ce phénomène
apparait dès que le dopage est inférieur à 10
ce qui permet l’obtention de pores fins et espacés (cf
Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
22
moyennement dopé. Les propriétés optiques de photoluminescence et d’électr
du silicium poreux sont dues à ce confinement quantique.
La formation des autres types de poreux (méso- et macroporeux) est quant à elle due à
la ZCE mais les phénomènes de formation des pores diffèrent selon le dopage du s
Ainsi l’effet tunnel domine dans le cas de substrats fortement dopés, permettant la formation
de mésopores. Lorsque le niveau de dopage diminue, des macropores sont formés
claquage ou collection des minoritaires pour le type n- et par émission thermo
Dans cette partie, les mécanismes de formation des matériaux fabriqués au sein du
laboratoire sont étudiés. Ainsi le cas de substrats n-, correspondant à du macroporeux,
, correspondant à du mésoporeux, sont présentés.
: exemple du type n-
Lorsqu’une plaque de silicium de type n faiblement dopée est plongée dans une
solution d’acide fluorhydrique, la polarisation de la diode formée au niveau du contact
e courant se propageant au travers de la ZCE est très faible, ne
permettant pas une gravure dans un temps raisonnable. Cependant en provoquant le claquage
ou en éclairant la face arrière du silicium, il est possible d’initier des courants significatifs.
gravure dans l’obscurité nécessite la création d’un fort potentiel, supérieur à 10 V
afin d’atteindre la tension de claquage et provoquer le claquage par avalanche. Ce phénomène
apparait dès que le dopage est inférieur à 1017 cm-3. La réaction de claquage
ce qui permet l’obtention de pores fins et espacés (cf Figure 12).
Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
moyennement dopé. Les propriétés optiques de photoluminescence et d’électroluminescence
du silicium poreux sont dues à ce confinement quantique.
et macroporeux) est quant à elle due à
la ZCE mais les phénomènes de formation des pores diffèrent selon le dopage du substrat.
Ainsi l’effet tunnel domine dans le cas de substrats fortement dopés, permettant la formation
de mésopores. Lorsque le niveau de dopage diminue, des macropores sont formés, par
n thermo-ionique pour le
Dans cette partie, les mécanismes de formation des matériaux fabriqués au sein du
, correspondant à du macroporeux, et des
Lorsqu’une plaque de silicium de type n faiblement dopée est plongée dans une
solution d’acide fluorhydrique, la polarisation de la diode formée au niveau du contact
e courant se propageant au travers de la ZCE est très faible, ne
permettant pas une gravure dans un temps raisonnable. Cependant en provoquant le claquage
ou en éclairant la face arrière du silicium, il est possible d’initier des courants significatifs.
gravure dans l’obscurité nécessite la création d’un fort potentiel, supérieur à 10 V
afin d’atteindre la tension de claquage et provoquer le claquage par avalanche. Ce phénomène
. La réaction de claquage est très localisée,

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
23
Figure 12 : Image MEB d'un échantillon de type n faiblement dopé gravé dans une solution de HF (15%) à 93
mA/cm² pendant 30 minutes dans l'obscurité.
Dans le cas d’un substrat éclairé, de nombreux couples trous-électrons sont créés au
sein du wafer. Ces trous sont amenés au niveau de la face avant, principalement par des
phénomènes de diffusion, où ils sont happés par les lignes du champ électrique appliqué. Le
champ électrique étant plus fort au niveau des fonds de pores, la gravure est
préférentiellement faite à ce niveau, permettant des pores très anisotropes (cf Figure 13).
Figure 13 : Image MEB d'un échantillon de type n faiblement dopé gravé dans une solution de HF(2.5%) à 20
mA/cm² pendant 30 min avec un éclairement en face arrière [43].
L’orientation des pores dépend de l’orientation cristalline des substrats utilisés. La
direction de gravure privilégiée est <100>, ce qui provoque une inclinaison des pores lorsque
l’orientation du substrat est différente de (100). Lorsque cette inclinaison est forte, la direction
<113> devient préférentielle [44], [45].
2.1.2 Mésoporeux : n+ et p+
Lorsque le silicium est plongé dans la solution d’acide fluorhydrique, il se forme
toujours une ZCE. La largeur de cette ZCE dépend du niveau de dopage du silicium. Dans le
cas de dopages élevés, cette zone est suffisamment mince pour permettre le passage des
porteurs par effet tunnel, permettant ainsi la gravure du silicium. Le champ électrique étant
plus fort au niveau du fond des pores, la gravure est privilégiée dans cette zone. Cela permet
d’obtenir une forte anisotropie.
L’évolution de la taille des pores en fonction du dopage est présentée à la Figure 14. Il
peut être observé que la taille des pores augmente avec le niveau de dopage pour le silicium

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
24
de type p alors qu’elle diminue pour le type n. Cela peut s’expliquer en partie par la
polarisation du contact Schottky, qui est direct pour le type p et inverse pour le type n.
Figure 14: Evolution du diamètre des pores en fonction du dopage pour différentes densités de courant dans une
solution d’HF et d’éthanol (1:1), cas du type n et du type p, d’après [46].
De plus, la gravure est préférentiellement orientée selon la direction <100> dans les
substrats ayant une orientation cristalline (100) et selon <113> pour les substrats (111), quel
que soit le type de dopage.
2.2 Paramètres de la gravure
Dans cette partie, seule la gravure des plaques de type p+ est étudiée. En effet,
l’évolution de la gravure varie en fonction du type et du niveau de dopage et seul ce type de
matériau a été utilisé au cours de la thèse.
2.2.1 Durée de gravure
A densité de courant constante, et si les gradients de porosité sont faibles, la durée de
gravure est proportionnelle à l’épaisseur de silicium poreux gravée. En effet, la réaction de
gravure électrochimique étant due à l’apparition des trous au niveau des pores, elle est donc
directement liée à la quantité de charges qui est délivrée, ce qui correspond à la durée de
gravure multipliée par le courant traversant la plaque.
2.2.2 Densité de courant
Dans le cadre de silicium de type p, la passivation au niveau des cristallites est réalisée
par la ZCE. En effet, la diode étant en polarisation directe, une zone de déplétion empêche la
formation de trous dans cette zone. Ainsi la taille minimale de la cristallite est limitée à deux
fois la ZCE, ce qui correspond à son état entièrement passivé. La ZCE diminue avec

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
25
l’augmentation du potentiel. Le potentiel étant directement lié à la densité de courant dans un
contact Schottky, une augmentation de la porosité est donc constatée lorsque la densité de
courant augmente, comme le montre la Figure 15.
Figure 15 : Evolution de la porosité en fonction de la densité de courant dans le cas de substrats de types p+ pour
différentes concentration d’HF [47].
De plus, la densité de courant détermine la vitesse de gravure du silicium poreux.
Ainsi plus la densité de courant est élevée, plus le silicium est gravé rapidement, comme cela
est représenté à la Figure 16.
Figure 16: Effet de la densité de courant sur la vitesse de gravure du silicium [48].

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
26
2.2.3 Concentration de HF
La concentration NT9 dans l’électrolyte va directement déterminer le point (JPS, UPS ),
comme le montre la Figure 17, définissant ainsi le domaine de gravure orientée de la couche
poreuse. Il peut être remarqué que ce point de fonctionnement est peu dépendant du type et du
niveau de dopage.
Figure 17 : Evolution de la densité de courant JPS (en pointillé) et de la densité de courant minimale d'électrolissage
(en continu) en fonction de la concentration [49].
On peut aussi remarquer que plus la concentration NT9 est élevée, moins la porosité
de la couche poreuse est importante, pour une même densité de courant. La Figure 18 montre
ainsi l’évolution de la porosité en fonction de la concentration en acide fluorhydrique pour
différentes valeurs de densité de courant.
Figure 18 : Evolution de la porosité en fonction de la concentration dans le cas de substrat p+ pour différentes densités
de courant [50].

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
27
2.2.4 Mode de gravure : courant ou tension constante
Afin de contrôler la réaction ayant lieu au niveau de l’interface Si/HF, deux
configurations sont possibles : le mode potentiostatique ou le mode galvanostatique.
Le mode potentiostatique, qui correspond à un contrôle du potentiel appliqué, est peu
utilisé pour la gravure du silicium [51]. Son principal avantage est de pouvoir contrôler des
réactions d’oxydo-réduction parasites, en évitant les plages de tensions où elles ont lieu. Cela
est particulièrement intéressant dans le cadre de pores traversants. Cependant lorsque les
wafers sont immergés, le potentiel au niveau de l’interface est mal connu, ce qui influence la
densité de courant et donc la porosité et la vitesse de gravure du silicium. De plus, le potentiel
au niveau de l’interface dépend de l’état de l’électrolyte, ce qui rend difficilement
reproductible le procédé de gravure.
La méthode galvanostatique, qui correspond au contrôle de la densité de courant,
permet de quantifier les charges qui sont utilisées dans les réactions d’oxydo-réduction. De
plus, la tension au niveau de l’interface est constante, ce qui permet d’avoir des couches de
silicium poreuses relativement reproductibles (taille des pores, porosité, profondeur).
2.3 Problématique des couches épaisses
2.3.1 Variation de la porosité
La concentration d’acide fluorhydrique au sein des pores varie de façon linéaire en
fonction de la profondeur des pores (cf Figure 19). Si la densité de courant appliquée ou la
tension de consigne sont constantes, la porosité va donc augmenter, comme montré dans la
Figure 18.

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
28
Figure 19 : Variation de la concentration en fonction de la profondeur des macropores gravés dans un substrat de
type n faiblement dopé [45].
De plus, cette baisse de la concentration NT9 va abaisser le niveau du point (JPS, UPS )
au cours de la gravure. Cela peut provoquer le passage à une réaction d’électropolissage si les
nouvelles valeurs de JPS ou de UPS passent en dessous des valeurs de consigne. Dans ce cas,
un décollement de la couche poreuse peut être observé. Ce phénomène a d’ailleurs été utilisé
pour créer des couches minces de silicium poreux [52].
Afin de limiter cet effet, le courant peut être appliqué de façon cyclique, ce qui permet
de conserver les caractéristiques de la gravure pour une densité de courant donnée, tout en
limitant la vitesse réelle de gravure. La concentration NT9 diminue alors plus lentement, ce
qui permet d’observer des porosités et un couple (JPS, UPS) quasiment constant au cours de la
gravure. Cette méthode est alors appelée méthode galvanostatique pulsée [53].
2.3.2 Séchage de la couche poreuse
Lors du séchage de la couche poreuse, la libération du liquide présent dans les pores
engendre l’apparition de contraintes capillaires ΔD (cf Equation 9) [54]. L’intensité de ces
contraintes est inversement proportionnelle au rayon des pores A et proportionnelle à la
tension de surface du fluide saturant a. Ce phénomène est déterminant pour les matériaux
ayant des porosités de type micro ou mésoporeux, où le diamètre des pores est critique.
ΔD = 2aA (9)
Ce phénomène peut créer la destruction de la couche poreuse par décollement de la
couche (cf Figure 20), et ce d’autant plus que la porosité est importante. Ainsi une épaisseur
critique de la couche poreuse notée ℎ4 est observée. Sa valeur est dépendante du matériau, de
la porosité et du fluide saturant. Cette épaisseur est de l’ordre du micron avec une porosité de
90% et d’une dizaine de microns avec une porosité de 80%, dans le cas de gravure dans un
électrolyte aqueux [55].

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
29
Figure 20: Exemple de décollement ou de fissures de couches de silicium microporeux lors du séchage.
Afin d’augmenter l’épaisseur critique pour une porosité donnée, il est possible de
changer le fluide saturant par un autre fluide ayant une tension de surface plus faible tel que le
pentane, permettant d’obtenir des contraintes capillaires plus faibles [55]. Une autre méthode,
très efficace, est de réaliser un séchage supercritique afin d’éviter l’apparition des tensions de
surface [56]. Cependant les porosités utilisées dans le cadre de cette thèse sont inférieures à
50% et un séchage normal en solution aqueuse est alors possible sans dégradation de la
couche poreuse.
3 Mesures des propriétés de la couche poreuse
De nombreuses méthodes de caractérisation ont été développées afin de mesurer les
paramètres du silicium poreux. Cependant les types de silicium qui peuvent être produits sont
nombreux, et les outils utilisés afin de les caractériser diffèrent selon leurs microstructures et
leurs épaisseurs. Dans cette partie, les principales méthodes utilisées pour les siliciums
mésoporeux sont exposées.
3.1 Microscopie électronique
La microscopie électronique à transmission, qui est basée sur l’observation des
électrons traversant l’échantillon, permet de visualiser la morphologie et la structure de la
couche poreuse. Cependant les traitements chimiques qui sont effectués sur l’échantillon
impacte fortement le résultat de l’observation. En effet, l’échantillon doit être très fin et un
usinage ionique est alors nécessaire. Ce bombardement ionique a tendance à modifier la
structure et à rendre amorphe le matériau [57].
La microscopie électronique à balayage permet de visionner la forme des pores et
l’épaisseur des couches poreuses après clivage ou découpe par un FIB (Focused Ion Beam).

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
30
La résolution de cette méthode est plus basse que celle de la transmission mais la couche
poreuse est moins dénaturée. Cette méthode est celle utilisée, avec la microscopie optique,
afin de mesurer les épaisseurs des couches au sein du laboratoire GREMAN.
3.2 Diffraction des rayons X
La méthode de diffraction des rayons X (XRD) couramment utilisée pour caractériser
la couche poreuse, plus précisément le taux de cristallinité et le paramètre cristallin a. La
Figure 21 montre un exemple de graphe obtenu lors de la mesure d’une couche poreuse d’un
silicium de type p+.
Figure 21 : Distribution de l'intensité au voisinage de la réflexion de Bragg (004) dans le cas d'un substrat de type p+.
Les cercles correspondent à la mesure expérimentale, les pointillés correspondent aux pics de silicium poreux (por-Si)
et cristallin (c-Si). Le trait continu est la somme des deux pics, [58] d’après [59].
Les deux pics correspondent aux résonances du silicium poreux et du silicium
cristallin. En mesurant la divergence entre ces pics, il est possible de remonter à la dilatation
ou la contraction du paramètre cristallin b , qui est fortement corrélé à la porosité [59].
Cependant cette méthode est surfacique et ne permet pas d’obtenir une information
volumique. Elle est de plus limitée au niveau de la taille des pores, qui doivent être de niveau
nanométrique. Ainsi cette méthode n’est pas adaptée pour les macroporeux.

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
3.3 Spectroscopie Raman
Figure 22 : Evolution de la fréquence de résonance du spectre Raman en fonction de la taille des cristallites
La spectroscopie Raman permet une évaluation de la taille des pores et de la porosité
de la couche poreuse grâce à l’étude de la résonance des cristallites
de cristallites provoque un décalage du pic de résonance par rapport au silicium (cf
22). Cependant cette méthode est surfacique et limitée à des cristallites de petites tailles, de
l’ordre de la dizaine de nanomètres
limite la gamme des mésoporeux
3.4 Adsorption isotherme
Cette méthode est basée sur l’analyse de l’adsorption isotherme (fixation d’un fluide
sur une surface) d’un gaz neutre à faible température. Cette adsorption est plus élevée dans le
cas de silicium poreux que dans le cas d’un silicium cristallin, par effet capillaire.
l’adsorption va augmenter avec la pression, le gaz pouvant alors pénétrer les pores les plus
fins.
Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
31
Raman
volution de la fréquence de résonance du spectre Raman en fonction de la taille des cristallites
La spectroscopie Raman permet une évaluation de la taille des pores et de la porosité
de la couche poreuse grâce à l’étude de la résonance des cristallites [61]. En effet,
de cristallites provoque un décalage du pic de résonance par rapport au silicium (cf
). Cependant cette méthode est surfacique et limitée à des cristallites de petites tailles, de
l’ordre de la dizaine de nanomètres, ce qui empêche la caractérisation de macroporeux et
a gamme des mésoporeux.
isotherme (BET)
Cette méthode est basée sur l’analyse de l’adsorption isotherme (fixation d’un fluide
sur une surface) d’un gaz neutre à faible température. Cette adsorption est plus élevée dans le
que dans le cas d’un silicium cristallin, par effet capillaire.
l’adsorption va augmenter avec la pression, le gaz pouvant alors pénétrer les pores les plus
Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
volution de la fréquence de résonance du spectre Raman en fonction de la taille des cristallites [60].
La spectroscopie Raman permet une évaluation de la taille des pores et de la porosité
En effet, la présence
de cristallites provoque un décalage du pic de résonance par rapport au silicium (cf Figure
). Cependant cette méthode est surfacique et limitée à des cristallites de petites tailles, de
, ce qui empêche la caractérisation de macroporeux et
Cette méthode est basée sur l’analyse de l’adsorption isotherme (fixation d’un fluide
sur une surface) d’un gaz neutre à faible température. Cette adsorption est plus élevée dans le
que dans le cas d’un silicium cristallin, par effet capillaire. De plus,
l’adsorption va augmenter avec la pression, le gaz pouvant alors pénétrer les pores les plus

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
32
Figure 23 : Evolution de l'adsorption isotherme en fonction de la pression dans le cas d'une couche de silicium
mésoporeux formé à partir de substrat de type p+. L'adsorbat utilisé est de l'azote, à une température de 77°K [62].
En utilisant les courbes obtenues et la méthode BJH (Barrett-Joyner-Halenda) [63],
des paramètres, tels que la porosité, la surface totale et la distribution des pores, peuvent être
extraits. Cependant les courbes obtenues par BET peuvent rapidement devenir complexes et il
devient alors difficile de caractériser la couche poreuse.
3.5 Spectrométrie par ellipsométrie
L’ellipsométrie étudie la polarisation et la phase d’une onde lumineuse réfléchie à
l’interface silicium poreux/ silicium cristallin afin d’obtenir l’épaisseur et la porosité [64]. La
mesure de porosité peut s’appuyer sur la variation des paramètres de l’onde, avec ou sans
adsorption d’un fluide dans le matériau poreux [65], [66]. Ainsi la distribution des pores peut
être mesurée. Cette méthode est cependant limitée par l’épaisseur de la couche poreuse, qui
doit être inférieure à une centaine de microns.
3.6 Spectroscopie SLIM
Cette méthode est basée sur l’interférométrie d’une onde électromagnétique dans le
domaine du visible au sein du système PoSi-Si. Une estimation du milieu est faite en prenant
deux fluides saturants ayant des propriétés optiques différentes, ce qui permet de remonter
aux paramètres de la couche poreuse [67]. Ainsi la porosité moyenne et la profondeur de la
couche poreuse sont déterminées. Cependant cette méthode est limitée au niveau de la taille
des pores (inférieure à une trentaine de nm) et de la profondeur de la couche poreuse
(inférieure à une centaine de microns).
3.7 Spectroscopie infrarouge à transformée de Fourier
Cette méthode, souvent nommée FTIR, consiste à mesurer l’absorption d’un milieu en
envoyer des ondes poly-chromatiques et traiter les données par transformée de Fourier. Ainsi
la caractérisation est beaucoup plus rapide que dans le cas d’une mesure dispersive, où chaque
onde monochromatique est mesurée. En traitant le spectre infrarouge, en transmission ou en
réflexion, d’un échantillon, les paramètres de la couche poreuse peuvent être estimés [68],
[69]. La méthode peut aussi être utilisée pour mesurer le spectre de photoluminescence dans
le cas de silicium microporeux [70]. Cependant cette méthode est limitée au niveau de la taille
des pores (inférieure à une trentaine de nm) et de la profondeur de la couche poreuse
(inférieure à une centaine de microns).

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
33
3.8 Gravimétrie
Cette méthode est basée sur la mesure de 3 masses : +(, +! et +. +( correspond à la
masse de la plaquette avant la gravure du silicium, +! à la masse de la plaque après gravure
et séchage de la plaquette et + à la masse de la plaquette après destruction de la couche
poreuse dans un bain de potasse (M). La différence +(-+! correspond à la masse de
Silicium gravé alors que la différence entre +!-+ correspond à la masse de silicium présent
dans la couche poreuse. La connaissance de ces deux masses permet de remonter à la porosité
(cf Equation 10).
D% =+( −+!+( −+ ∗ 100 (10)
Connaissant la densité du Silicium de$ , l’épaisseur de la couche poreuse fge$ peut
aussi être approximée en tenant compte de la surface gravée U:
fge$ =+( −+dU (11)
Cependant cette méthode mesure une valeur moyenne de la porosité, ne tenant pas
compte de la distribution des pores. Elle ne permet pas non plus la détermination de la
porosité pour des matériaux macroporeux, la surface de réaction avec le KOH étant alors trop
faible pour graver le silicium poreux rapidement. De plus, l’erreur de mesure peut être
importante pour des couches de faibles épaisseurs, la variation de masse étant alors minime
devant la masse de la plaque. Cette méthode est celle utilisée au sein du laboratoire
GREMAN.
3.9 Discussion
Un récapitulatif des différentes méthodes de caractérisation utilisées pour le silicium
poreux est présenté au Tableau 4.
Les méthodes non destructives actuellement utilisées sont ainsi majoritairement
électromagnétiques (XRD, Raman, Ellipsométrie, SLIM, FTIR) mais sont limitées par leurs
faibles longueurs d’ondes, ce qui limite fortement la taille maximale des pores observables.
De plus, l’atténuation est très importante, ce qui limite la pénétration et donc la profondeur de
la couche poreuse observable. Cependant la distribution des pores selon leurs diamètres peut
être caractérisée grâce à la spectroscopie Raman et à la méthode XRD.

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
34
Tableau 4 : Comparaison des différentes méthodes de caractérisation.
Taille des
pores
Méthode
destructive
Type de
porosité
Distribution
des pores
Epaisseur de
la couche
poreuse
MET oui Micro
méso oui surfacique
MEB oui Micro
méso oui Cross-section
Gravimétrie < 100 nm oui Micro
méso non
XRD < 30 nm non Micro
méso oui surfacique
Raman < 10 nm non Micro
méso oui surfacique
BET non Micro
méso oui
Ellipsométrie < 30 nm non Micro
méso non < 10 µm
SLIM < 30 nm non Micro
méso non < 100 µm
FTIR < 30 nm non Micro
méso non < 100 µm
Ultrasons < 1µm non
Micro
Méso
macro
non < 500 µm
Les méthodes destructives telles que le MET ou le MEB permettent une étude
complète des caractéristiques de la couche poreuse. En effet, une étude tomographique est
possible, ce qui permet de faire une image tridimensionnelle du réseau poreux.
La méthode ultrasonore présentée dans cette thèse possède une longueur d’onde plus
importante comparée aux méthodes électromagnétiques (de l’ordre de 250 µm), ce qui permet
de pouvoir observer des pores de grandes dimensions (jusqu’à 1 µm) en considérant le milieu
comme homogène. De plus, l’atténuation est plus faible, permettant une forte pénétration de

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
35
l’onde ultrasonore au sein du matériau poreux, comparée aux méthodes électromagnétiques.
Cependant la longueur d’onde rend impossible la détermination de la distribution des pores,
tant en surface qu’en profondeur.
Afin de faire un suivi in situ de la gravure électrochimique du silicium, les seules
méthodes qui peuvent être utilisées sont celles à base d’ondes électromagnétiques ou
mécaniques. Les ondes mécaniques ont l’avantage de ne pas être ionisants et de ne présenter
aucun danger pour l’échantillon et le manipulateur. De plus, la forte pénétration des ondes
mécaniques permettent l’étude des couches épaisses de silicium poreux.
Les mesures destructives effectuées au laboratoire afin de vérifier la véracité des
mesures ultrasonores sont la gravimétrie, pour la porosité, et l’observation de l’échantillon au
microscope optique, pour l’épaisseur.
4 Dispositifs mis en œuvre au laboratoire
4.1 Cuves d’électrolyse
La cuve doit être constituée de matériaux résistants aux attaques de l’acide
fluorhydrique. Les matériaux les plus souvent utilisés sont donc le polychlorure de vinyle
(PVC), le polypropylène (PP), le polytétrafluoruroéthylène (PTFE) et le polyfluorure de
vinylidène (PVDF). Dans les cas où une ouverture doit être effectuée afin d’éclairer le
substrat (cas du type n-), le choix se limite alors au PVC transparent et au saphir.
Au sein du laboratoire GREMAN, des cellules de gravure à double réservoir sont
utilisées, ce qui permet une homogénéité plus importante du contact en face arrière, par
rapport à une cellule à simple réservoir. Les deux réservoirs sont emplis de la même solution
et l’étanchéité est faite grâce au porte substrat supportant la plaquette de silicium lors de la
réaction d’anodisation. Le retrait du porte substrat peut ainsi s’effectuer sans que la vidange
de la solution soit nécessaire. De plus, le traitement de la plaquette après l’anodisation est plus
simple car il n’y a pas de restrictions dues à une contamination métallique, ce qui est le cas
pour permettre le contact en face arrière dans le système simple réservoir.
L’électrolyte permet, dans cette configuration, la dissolution du silicium en face avant
grâce à la réaction d’anodisation et l’établissement d’un contact en face arrière. L’un des
inconvénients de ce dispositif est qu’il devient alors difficile de connaitre avec précision le
potentiel supporté par la plaquette de silicium. De plus, une formation de dihydrogène gazeux

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
36
est observée au niveau de la plaque arrière ainsi qu’au niveau des électrodes à cause des
échanges d’électrons à ces interfaces, faisant intervenir le couple redox H+/H2.
Figure 24 : Coupe et vue globale des cuves CP1 et CP2.
Au laboratoire GREMAN, trois cuves mettent en œuvre cette configuration. Deux
cuves (CP1 et CP2) permettant la gravure de substrats 6 pouces ont été développées par
AMMT, basée en Allemagne (cf Figure 24). Elles sont constituées de polypropylène et ont
une contenance de 8.2L. Une fenêtre en saphir permet l’éclairage du substrat.
Figure 25 : Coupe de la cuve CP3.
La troisième cuve (CP3), acquise début 2010, permet la gravure de petits échantillons,
de l’ordre du cm² (cf Figure 25). La contenance du réservoir est de 850 ml et des agitateurs
ont été intégrés afin de permettre une bonne homogénéité de la solution d’acide

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
37
fluorhydrique. De même que dans les 2 premières cuves, l’éclairage est permis grâce à une
fenêtre en saphir.
Au vu de la forme des cuves, la disposition des transducteurs ultrasonores ne peut
permettre qu’une incidence normale des ondes ultrasonores, limitant ainsi l’étude aux ondes
longitudinales. La mesure peut se faire en transmission sur les cuves CP1 et CP2 et en
réflexion sur la cuve CP3.
4.2 Fabrication des spécimens
Dans cette thèse, le matériau qui est étudié est le silicium mésoporeux, l’objectif étant
la caractérisation des couches poreuses utilisées dans le cadre de systèmes RF [18], [19]. Afin
d’obtenir du silicium mésoporeux, les substrats utilisés doivent être de type p+ ou n+. Il a été
choisi d’utiliser des substrats de type p+, les caractéristiques géométriques étant semblables au
type n+. La résistivité du silicium est comprise entre 10 et 50 mΩ.cm, ce qui correspond à un
dopage aux environs de 1018 at.cm-3 dans le cas d’un silicium de type p. Ces matériaux
permettent d’obtenir des pores dont le diamètre est d’environ 10 à 20 nanomètres, dans les
gammes de densité de courant utilisées, entre 15 et 80 mA/cm2 (cf Figure 26).
Figure 26 : Image MEB d'un échantillon de type p fortement dopé gravé en solution d’HF (30%) à une densité de
courant de 43.6 mA/cm2.
La surface utile de gravure pour la caractérisation est limitée à un diamètre d’un
pouce. Un porte substrat adapté, permettant de graver un disque d’un pouce de diamètre, est
donc utilisée. Afin de limiter la consommation de silicium, les wafers de six pouces sont

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
38
découpés en quatre plaquettes carrés, de 5cm de coté. Cette forme permettra de plus une
meilleure mise en place de l’échantillon lors des mesures ultrasonores.
Enfin les valeurs de porosité souhaitées sont comprises entre 30 et 50%, ce qui
correspond aux valeurs classiquement utilisées au laboratoire sur ce type de substrat. Les
épaisseurs quant à elles seront supérieures à une quarantaine de microns.
La méthode galvanostatique pulsée est de préférence utilisée afin de limiter les
variations de porosité au cours de la gravure et permettre une bonne reproductibilité de la
gravure. Le rapport cyclique est de 2/7, correspondant à 2 secondes d’excitation pour 5
secondes de repos.
L’excitation est permise grâce à un potentiostat-galvanostat 7060 avec son booster
7061 de la société AMEL. Cette source permet de délivrer un courant de +/- 48 A ou +/- 50 A
respectivement dans les gammes de tension +/- 30 V et +/- 15 V avec une précision de +/- 0,2
% + 0.1 % de la pleine échelle. Avec la configuration de connexion actuelle, le potentiel en
mode galvanostatique est limité à +/- 12 V. Elle est pilotée grâce à un pc, permettant de
définir la densité de courant, la durée de gravure et le rapport cyclique.
La solution d’acide fluorhydrique est composée d’un mélange d’acide fluorhydrique
concentré à 50%, d’acide acétique et d’eau pure, selon les coefficients stœchiométriques
respectifs de 4,6, 2,1 et 1,5. Ainsi la concentration d’acide fluorhydrique dans la solution
finale est de 30%.
Les échantillons gravés au cours de la thèse sont présentés dans le Tableau 5. Les
paramètres de gravure tels que la densité de courant, la durée de gravure et le rapport cyclique
sont détaillés. Les mesures de porosité sont effectuées grâce à la méthode gravimétrique et les
épaisseurs sont mesurées grâce au microscope optique.
L’échantillon 1 est un échantillon de référence, uniquement constitué de silicium
cristallin. Il permettra de vérifier si les mesures acoustiques sont cohérentes, les paramètres
acoustiques du silicium d’orientation (100) étant connues.
Les gravures des échantillons 2, 3 et 4 ont été effectuées avec la même densité de
courant, en faisant varier la durée de gravure. Cette méthode permet d’obtenir des échantillons
ayant sensiblement la même porosité et des profondeurs de gravure différentes. Leurs
porosités n’ont pas été mesurées. Cependant elles peuvent être déduites à partir des valeurs

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
39
mesurées sur les autres spécimens, la solution d’acide et les plaques de silicium étant
identiques.
Tableau 5 : Description des échantillons gravés au cours de la thèse : comparaison des valeurs attendues et mesurées
en fonction des conditions de gravure.
Conditions de gravure Valeurs attendues
avant la gravure
Valeurs mesurées par méthode
destructive
Numéro
d’échantillon
Densité
de
courant
(mA/cm²)
Durée
(min)
Rapport
cyclique
Epaisseur
(µm)
Porosité
(%)
Epaisseur
moyenne
(µm)
Porosité
moyenne
mesurée
par
gravimétrie
(%)
Epaisseur du
wafer
mesurée au
microscope
optique
(µm)
1 0 0 1 0 0 0 0 683
2 28 87 1 100 35-40 101 / 670
3 28 174 1 200 35-40 199 / 675
4 28 261 1 300 35-40 285 / 680
5 42 10 2/7 40 40 41 35.5 707
6 42 20 2/7 80 40 81 37.2 701
7 42 30 2/7 120 40 115 39.4 704
8 80 20 2/7 120 45 97 42.2 701
9 30 45 2/7 120 35 114 36.1 702
10 15 75 2/7 120 30 119 33.8 706
Les échantillons 5,6 et 7 sont aussi gravés avec la même densité de courant et des
durées de gravures croissantes. La densité de courant étant plus élevée, la méthode pulsée est
utilisée pour permettre une homogénéité de la porosité au cours de la gravure. Cependant, une
augmentation de la porosité moyenne est constatée entre l’échantillon le plus fin (35,5%) et le
plus épais (39.4%). Ceci peut être expliqué par une évolution de la porosité en fonction de la
profondeur. Ce gradient pourra induire des erreurs de mesure ultrasonore. L’erreur entre les
valeurs attendues et les valeurs mesurées est inférieure à 5%.
Les échantillons 8,9 et 10 ont été gravés afin d’avoir la même profondeur de gravure
que l’échantillon 7 mais des porosités différentes. Les porosités mesurées par méthode
gravimétrique sont proches de celles escomptées, avec une erreur maximale de 6%.

Chapitre 1 : Gravure Electrochimique Du Silicium Poreux
40
5 Conclusion
Ce chapitre a porté sur la fabrication du silicium poreux par anodisation
électrochimique. Ainsi les propriétés des semi-conducteurs et les principes de base de la
gravure électrochimique du silicium en solution d’acide fluorhydrique ont été présentés. Puis
l’influence des paramètres de gravure, allant du substrat au dispositif expérimental a été
exposée. Une attention particulière a été portée sur les problématiques de couches épaisses et
comment limiter leurs apparitions. Enfin les matériels disponibles au sein du GREMAN sont
présentés.
Les méthodes de caractérisation permettant de caractériser des couches de silicium
poreux sont présentées, ainsi que leurs avantages et inconvénients respectifs. Il a ainsi été
montré que les méthodes ultrasonores peuvent permettre une caractérisation in situ de la
couche poreuse, et cela même si la couche est épaisse. De plus, cette méthode est non
ionisante et sans danger pour le manipulateur.
Les paramètres qui sont caractérisés par la méthode ultrasonore sont l’épaisseur de la
couche poreuse et la porosité. Ces paramètres sont mesurés de manière destructive après la
caractérisation ultrasonore afin de permettre une comparaison, grâce à une gravimétrie et à
une observation au microscope optique.
Les morphologies et la dimension des pores sont considérées constantes entre les
échantillons car les mêmes substrats et solutions sont utilisés, la densité de courant évoluant
peu (entre 15 et 80 mA/cm2). Ainsi les pores obtenus sont cylindriques et de diamètre moyen
de 20 nm.
Dans la prochaine partie, la propagation des ondes ultrasonores au sein de la plaquette
de silicium gravé va être étudiée. L’évolution des paramètres mécaniques du matériau en
fonction sera étudiée afin de modéliser l’interaction onde-matière et déduire les paramètres
acoustiques de la couche poreuse, en utilisant l’acoustique des milieux poreux. Enfin un
modèle de propagation multicouche, équivalent à la plaquette de silicium gravé, est proposé.

Chapitre 2 : Acoustique des Milieux Poreux
41
Chapitre 2 : Acoustique des Milieux
Poreux

Chapitre 2 : Acoustique des Milieux Poreux
42
Les matériaux poreux sont omniprésents dans notre vie courante, qu’ils soient naturels
(roches, argiles...) ou artificiels (mousses, paille de fer, laine de verre, verre ou cristaux
poreux...). De plus, les domaines industriels où ces matériaux sont utilisés sont très variés,
allant de la construction à la microélectronique.
La détermination des paramètres physiques tels que l’isolation thermique ou sonore à
partir des paramètres des matériaux constituant le milieu poreux n’est pas aisée et est encore
actuellement un sujet de recherche actif. Les matériaux poreux sont en effet des milieux
hétérogènes diphasiques, comprenant une phase fluide et une phase solide. Ces deux milieux
ont des caractéristiques physiques très différentes et leur arrangement spatial est souvent
complexe. Les propriétés du système ne peuvent donc pas être considérées comme la simple
combinaison linéaire de celles des deux matériaux. Leur étude passe donc souvent par une
homogénéisation pour obtenir les caractéristiques effectives du milieu poreux. Comme les
propriétés du matériau dépendent en partie de la microgéométrie intrinsèque des phases, une
connaissance microscopique du matériau poreux est requise pour pouvoir en déduire les
propriétés macroscopiques.
Dans ce chapitre, les caractéristiques et les grandeurs des matériaux poreux qui sont
utiles pour étudier la propagation des ondes acoustiques sont définis. L’évolution des
constantes mécaniques du silicium poreux en fonction de la porosité est étudiée, puis la
propagation d’une onde ultrasonore au travers d’une couche poreuse est explicitée. Enfin ceci
est appliqué à la couche de silicium mésoporeux de notre étude.

Chapitre 2 : Acoustique des Milieux Poreux
1 Matériaux Poreux
Dans cette partie, les grandeurs permettant de décrire le milieu poreux sont définies,
puis les méthodes de mesures ou d’estimations de ces grandeurs sont présentées.
1.1 Grandeurs caractéristiques
1.1.1 Porosité
Figure 27 : Présentation des différents volumes composant un milieu poreux.
respectivement à l’ensemble du volume occupé par les particules solides
Comme présenté dans la
milieu solide, qui constitue la matrice, et en un milieu fluide. Ainsi,
poreux peut être décomposé en un volume Gi , correspondant à sa phase fluide. La définition la plus courante
correspondant au rapport de l’ensemble du volume de fluide
appelée la porosité totale jk. j
L’Equation 12 montre
comprise entre 0 (cas d’un matériau non poreux) et 1 (cas d’un fluide libre). Elle décrit ainsi
la proportion de fluide incluse
Cependant, le fluide non connecté au milieu extérieur a un comportement mécanique
qui diffère de celui qui y est connecté. Afin de tenir compte de ces différences, il a été défini
une porosité dite ouverte, ou connectée, qui corr
Chapitre 2 : Acoustique des Milieux Poreux
43
Dans cette partie, les grandeurs permettant de décrire le milieu poreux sont définies,
puis les méthodes de mesures ou d’estimations de ces grandeurs sont présentées.
caractéristiques
résentation des différents volumes composant un milieu poreux. Les volumes respectivement à l’ensemble du volume occupé par les particules solides (à gauche) et à l’ensemble du volu
par le fluide (au milieu).
Comme présenté dans la Figure 27, un matériau poreux peut être décomposé en un
milieu solide, qui constitue la matrice, et en un milieu fluide. Ainsi, le volume
poreux peut être décomposé en un volume Gl, correspondant à sa matrice solide, et un volume
, correspondant à sa phase fluide. La définition la plus courante
correspondant au rapport de l’ensemble du volume de fluide Gi sur le volume total
jk =GiG = 1 − GlG , G = Gl + Gi
montre que la porosité totale est une grandeur sans dimension qui est
comprise entre 0 (cas d’un matériau non poreux) et 1 (cas d’un fluide libre). Elle décrit ainsi
la proportion de fluide incluse dans le matériau poreux.
Cependant, le fluide non connecté au milieu extérieur a un comportement mécanique
est connecté. Afin de tenir compte de ces différences, il a été défini
une porosité dite ouverte, ou connectée, qui correspond à l’ensemble des pores qui sont reliés
Dans cette partie, les grandeurs permettant de décrire le milieu poreux sont définies,
puis les méthodes de mesures ou d’estimations de ces grandeurs sont présentées.
et correspondend
et à l’ensemble du volume occupé
un matériau poreux peut être décomposé en un
le volumeG du matériau
, correspondant à sa matrice solide, et un volume
, correspondant à sa phase fluide. La définition la plus courante de la porosité,
sur le volume total G, est
(12)
que la porosité totale est une grandeur sans dimension qui est
comprise entre 0 (cas d’un matériau non poreux) et 1 (cas d’un fluide libre). Elle décrit ainsi
Cependant, le fluide non connecté au milieu extérieur a un comportement mécanique
est connecté. Afin de tenir compte de ces différences, il a été défini
espond à l’ensemble des pores qui sont reliés

Chapitre 2 : Acoustique des Milieux Poreux
à l’extérieur. La porosité non connectée est quant à elle appelée porosité fermée ou occluse
[71].
Dans certains cas, la porosité est entièrement connectée car due à des attaques
extérieures, et donc la porosité ouverte est égale à la porosité totale. Cependant dans le ca
matériaux frittés ou de mousses expansives, la proportion de pores fermés est non négligeable,
voire majoritaire. De même, certains matériaux peuvent par effet capillaire empêcher qu’un
fluide remplisse entièrement les espaces connectés, créant des es
alors de porosité piégée [71]. Dan
dans la modélisation du matériau.
1.1.1.1 Porosité idéalisée
La complexité des matériaux poreux a poussé les scientifiques à idéaliser les
différentes formes de porosité. Les milieux poreux peuvent ainsi
empilements réguliers de sphères, ce qui permet de retrouver des paramètres tels que les
caractéristiques mécaniques ou la tortuosité.
Les espaces poreux peuvent être considérés comme étant l’espace entre les sphères,
nommé espace intergranulaire, ou celui formé par les sphères elles
vacuolaire [71](cf Figure 28). Ainsi nous pouvons voir que le taux de porosité est indépendant
de la taille des grains lorsque ceux
devient aléatoire, la porosité ne peut être calculée de façon simple et une étude statistique doit
être menée [71].
Figure 28 : Principaux empilements de sphères utilisés pour la modélisation des espaces poreux idéaux ainsi que leurs
Chapitre 2 : Acoustique des Milieux Poreux
44
à l’extérieur. La porosité non connectée est quant à elle appelée porosité fermée ou occluse
Dans certains cas, la porosité est entièrement connectée car due à des attaques
extérieures, et donc la porosité ouverte est égale à la porosité totale. Cependant dans le ca
matériaux frittés ou de mousses expansives, la proportion de pores fermés est non négligeable,
voire majoritaire. De même, certains matériaux peuvent par effet capillaire empêcher qu’un
fluide remplisse entièrement les espaces connectés, créant des espaces "vides". Nous parlons
. Dans ces cas là, il faut tenir compte des différentes porosités
dans la modélisation du matériau.
La complexité des matériaux poreux a poussé les scientifiques à idéaliser les
différentes formes de porosité. Les milieux poreux peuvent ainsi être modélisés comme des
empilements réguliers de sphères, ce qui permet de retrouver des paramètres tels que les
caractéristiques mécaniques ou la tortuosité.
Les espaces poreux peuvent être considérés comme étant l’espace entre les sphères,
intergranulaire, ou celui formé par les sphères elles-mêmes, nommé espace
). Ainsi nous pouvons voir que le taux de porosité est indépendant
de la taille des grains lorsque ceux-ci sont ordonnés de façon régulière. Lorsque l’empilement
ne peut être calculée de façon simple et une étude statistique doit
rincipaux empilements de sphères utilisés pour la modélisation des espaces poreux idéaux ainsi que leurs
porosités respectives.
à l’extérieur. La porosité non connectée est quant à elle appelée porosité fermée ou occluse
Dans certains cas, la porosité est entièrement connectée car due à des attaques
extérieures, et donc la porosité ouverte est égale à la porosité totale. Cependant dans le cas de
matériaux frittés ou de mousses expansives, la proportion de pores fermés est non négligeable,
voire majoritaire. De même, certains matériaux peuvent par effet capillaire empêcher qu’un
paces "vides". Nous parlons
s ces cas là, il faut tenir compte des différentes porosités
La complexité des matériaux poreux a poussé les scientifiques à idéaliser les
être modélisés comme des
empilements réguliers de sphères, ce qui permet de retrouver des paramètres tels que les
Les espaces poreux peuvent être considérés comme étant l’espace entre les sphères,
mêmes, nommé espace
). Ainsi nous pouvons voir que le taux de porosité est indépendant
ci sont ordonnés de façon régulière. Lorsque l’empilement
ne peut être calculée de façon simple et une étude statistique doit
rincipaux empilements de sphères utilisés pour la modélisation des espaces poreux idéaux ainsi que leurs

Chapitre 2 : Acoustique des Milieux Poreux
45
1.1.1.2 Porosité réelle
Bien que les espaces poreux présentés ci-dessus soient déjà de formes complexes (cas
des distributions aléatoires), les milieux poreux réels ont des géométries beaucoup plus
complexes. Cette complexité géométrique est augmentée par le fait que la plupart des
méthodes d’observation restent majoritairement bidimensionnelle, ce qui peut entrainer un
défaut dans la connaissance des propriétés de la structure poreuse.
Dans le but de classifier les différents types de porosités, les géologues ont proposé
une méthode consistant à définir l’espace poreux comme le complément de la matrice,
appelée classification de Choquette et Pray [72]. Trois types de pores sont alors définis :
l’espace entre les grains ou cristaux (intergranulaire), l’espace poreux à l’intérieur des grains
ou cristaux (intragranulaire) et celui créé à partir de la dissolution de grains ou cristaux
(moldique). Cette description peut être affinée grâce à la dépendance de cette porosité par
rapport à la structure initiale du matériau : la porosité « fabric selective », dépendante
uniquement de la structure, et « non fabric selective », due à l’altération de cette structure.
Cette méthode est particulièrement utilisée pour l’étude des roches calcaires.
Matheron a proposé une autre méthode consistant à étudier de façon probabiliste les
caractéristiques du matériau pour connaître sa porosité [73]. Cette méthode prend pour
hypothèse que le milieu est isotrope et donc l’observation d’une variable sur une petite
surface peut permettre une généralisation de cette variable. La variable est alors considérée
comme stationnaire. A partir d’une certaine surface, le calcul de la porosité devient alors
asymptotique et invariant. La mesure de la distance correspondante à cette invariance, appelée
portée donne une idée des dimensions microscopiques du milieu poreux.
1.1.1.3 Cas particuliers
Dans les porosités exposées précédemment, nous avions affaire à des formes
tridimensionnelles. Cependant dans les milieux réels, certaines porosités sont dues à des
failles quasi bidimensionnelles induites par exemple par des joints de grains ou des fractures à
l’intérieur d’un grain. Ce type de porosité est appelé espace poreux fissural [71]. Ces failles
peuvent être modélisées comme des plans afin de simplifier leurs descriptions. Bien que
représentant une fraction volumique très faible (0.5% est considérée comme une valeur élevée
de porosité fissurale), cela engendre une évolution radicale des caractéristiques du matériau,
causant une perte de cohésion du matériau. De plus, son observation est difficile car une partie

Chapitre 2 : Acoustique des Milieux Poreux
46
des fissures peut être due à la préparation des échantillons pour l’observation desdites
fissures.
Un autre cas intéressant se présente lorsque deux types de porosités sont présents au
sein d’un même matériau poreux, typiquement d’échelles différentes. On parle alors de
milieux à double porosité. On doit alors prendre en compte les deux types de porosités pour
pouvoir étudier le milieu poreux. Un exemple de milieu à double porosité est l’os cortical
[74].
1.1.1.4 Géométrie
Les matériaux poreux sont présents sous de nombreuses formes, dépendant fortement
de leur processus de formation. Ainsi les mousses expansives ont une porosité très élevée et
leur matrice se présente sous forme de poutres interconnectées alors que les matériaux fibreux
comme la laine de verre ont une matrice beaucoup moins connectée. La forme de porosité
peut causer de larges variations sur les comportements mécanique et thermique du milieu.
1.1.2 Tortuosité
La définition la plus courante de la tortuosité est le rapport de la géodésique parcourue
par le fluide sur la longueur euclidienne du pore. Cette grandeur est utilisée pour décrire la
diffusion dans un matériau poreux [75]. La tortuosité a donc une valeur toujours supérieure ou
égale à 1 (cas de la ligne droite). En effet, en considérant une onde se propageant dans le
milieu, le fluide situé dans un conduit qui est dans une direction différente de celle de l’onde
devra se déplacer sur une distance supérieure au fluide d’un conduit colinéaire à l’onde. Ce
trajet plus long doit être pris en compte pour les calculs des effets visqueux et inertiels.
Figure 29 : Présentation des déplacements microscopiques de fluide selon la géométrie des pores : droits (a), obliques
(b) ou de rayon variable (c).

Chapitre 2 : Acoustique des Milieux Poreux
47
Différentes configurations de pores sont représentées sur la Figure 29. Le premier cas
traite de la configuration avec un conduit droit dans la direction de l’onde. Dans ce cas, la
tortuosité est strictement égale à 1. Dans le deuxième cas, l’inclinaison provoque une
augmentation du trajet du fluide qui peut être aisément évaluée. Le dernier cas montre que la
variation du rayon de la section provoque également une augmentation de la tortuosité.
1.1.3 Perméabilité
La perméabilité est un paramètre physique qui a été introduit par Darcy en 1856 [76].
Il a remarqué qu’une membrane poreuse créait une baisse de charge corrélée aux
caractéristiques du matériau lorsqu’elle était mise sur le trajet d’un fluide. En effet, le débit n
au travers d’une lame poreuse de longueur Δ et de surface S dépend proportionnellement de
la différence de pression ΔD entre l’aval et l’amont de cette lame (cf Equation 13). Il en a
déduit que le coefficient directeur M était un paramètre intrinsèque du matériau et le nomma
coefficient de perméabilité.
n = MU ΔDΔ (13)
En introduisant la viscosité o du fluide, cette formule empirique peut être généralisée :
n = po U ΔDΔ (14)
Le paramètre p est alors appelé la perméabilité. Ce paramètre est alors indépendant du
fluide utilisé. Il est homogène à une surface et son unité dans le système international est donc
naturellement le m². Cependant les valeurs de perméabilité rencontrées dans la nature sont très
faibles comparées au mètre carre et le Darcy est traditionnellement utilisé. Sa valeur est
proche du micromètre carré (1 Darcy = 0.986923 µm²). Le millidarcy (mD) est communément
utilisé et approximé à 10-15m².

Chapitre 2 : Acoustique des Milieux Poreux
48
1.1.4 Longueur caractéristique visqueuse
Figure 30 : Détermination de la longueur visqueuse par rapport à la géométrie du pore.
Les travaux de Johnson en 1986 permettent d’intégrer les effets visqueux en
introduisant la longueur caractéristique visqueuse Λ [77]. Cette dimension est un paramètre
géométrique, qui est de l’ordre du plus petit rayon du pore (cf Figure 30). Cette définition
vaut pour une surface solide régulière et pour une épaisseur de couche limite faible devant le
rayon de courbure caractéristique de l’interface [78]. Lorsque la surface des pores présente
des singularités (pointes), cette définition de la longueur caractéristique n’est plus valable.
1.2 Mesures et estimations
1.2.1 Porosité
Une évaluation de la porosité s’appuie sur la mesure des différents volumes composant
le milieu poreux.
La détermination du volume total peut être faite grâce au changement de volume
lorsque le matériau est plongé dans un fluide non mouillant, tel que le mercure par exemple.
Cette méthode de mesure est très précise et permet de mesurer des formes quelconques.
La détermination du volume de la matrice solide est possible en plongeant le matériau
poreux dans un fluide mouillant. Le fluide doit être inerte au regard de la matrice solide afin
de permettre la détermination du volume. Si la mouillabilité est insuffisante, on observe une
surestimation du volume.
Le volume de pores ouverts peut être estimé par une mesure de masse après saturation
du milieu poreux par un fluide mouillant. La différence de masse entre le milieu saturé et le
milieu sec nous donne une indication du volume, pondéré par la masse volumique du fluide
saturant.

Chapitre 2 : Acoustique des Milieux Poreux
49
Dans le cadre d’une porosité créée par attaque chimique extérieure, il est possible
d’estimer la porosité en utilisant 3 mesures de masse : avant l’attaque, notée +(, après la
gravure, notée +!, et après destruction de la couche poreuse, notée +. La porosité peut alors
être déduite des différences de masses (cf Equation 15). Cette méthode est appelée méthode
gravimétrique.
D% = +( −+!+( −+ (15)
La porosimétrie au mercure permet de déterminer de manière quantitative la taille des
pores ainsi que leurs volumes et leurs distributions [79]. Pour cela, du mercure est injecté à
différentes pressions et la quantité de mercure ayant traversé le milieu poreux est observé
pour chaque pression. Cette analyse, unidimensionnelle et moyennée sur une surface, est
considérée comme représentative.
La structure du matériau poreux peut aussi être observée grâce à des méthodes de
microscopie électronique [80]. Le volume de solide ainsi que le volume de pore peuvent être
mesurés. Cette méthode est aussi quantitative car les diamètres des pores et leurs formes
peuvent être observés. De plus, des tomographies 3D ont été effectuées afin de reconstruire
entièrement le milieu poreux [81], ce qui est très utile pour la mise en place de simulations.
1.2.2 Tortuosité
La connaissance de la tortuosité est essentielle car elle joue un rôle important dans la
mobilité des espèces fluides dans un milieu poreux et donc notamment sur la perméabilité
dudit milieu.
Il existe actuellement principalement deux approches expérimentales pour mesurer de
façon indirecte la tortuosité. La première méthode consiste à mesurer le coefficient de
diffusion d’un milieu poreux puis à le comparer avec une mesure de référence dans un
échantillon dont la diffusion est connue [82]. L’autre méthode consiste à mesurer la
conductivité électrique, basée sur le transport des ions dans le milieu poreux, afin de déduire
la tortuosité [83]. Ces méthodes sont cependant longues, car elles doivent être réalisées pour
chaque valeur de porosité.
Ainsi de nombreux auteurs ont proposés des méthodes permettant d’estimer de façon
plus ou moins empiriques la tortuosité d’un milieu poreux. Shen a rassemblé dans son article
différents modèles pour estimer la tortuosité et a donné leurs domaines d’application [84].

Chapitre 2 : Acoustique des Milieux Poreux
50
Les modèles théoriques s’appuient sur une idéalisation du milieu afin de pouvoir
estimer la tortuosité de façon analytique. Les plus simples de ces modèles sont basés sur une
collection de pores orientés de façon aléatoire au travers d’une membrane poreuse [85], [86].
Une autre idéalisation courante est d’utiliser des structures formées à partir de sphères [87],
[88], [89] ou de cylindres [90].
Les méthodes empiriques permettent quant à elles de s’adapter a la microgéométrie
propre au milieu mais nécessitent des paramètres d’ajustement, ce qui doit donc s’appuyer sur
une bonne connaissance a priori du matériau ou d’une campagne de mesures pour permettre
l’ajustement. Selon le type de matériau rencontré, ces relations peuvent être linéaires [91],
basées sur la loi d’Archie [92], [93] ou sur des lois logarithmiques [94].
1.2.3 Perméabilité
La perméabilité peut être évaluée en mesurant la perte de charge due à l’insertion du
milieu poreux à caractériser [95]. Cette méthode doit être corrigée dans le cas de gaz à cause
de l’effet Klinkenberg [96]. De plus, la perméabilité varie selon la porosité et le type de
matériau, demandant de nombreux essais
Afin d’éviter cette campagne de mesures, de nombreux chercheurs ont proposé des
modèles permettant l’estimation de la perméabilité d’un matériau poreux. Le premier
paramètre utilisé pour estimer la perméabilité est souvent la porosité car ce paramètre peut
assez facilement être estimé par méthode gravimétrique. Cependant, même si des exemples de
très bonnes corrélations entre la porosité et la perméabilité existent [97], cette relation est le
plus souvent difficile à mettre en place. L’un des inconvénients des relations j − p est
inhérent au fait que le rayon des pores est dépendant de la porosité, mais aussi du type de
matériaux étudié. Ainsi à même porosité, on peut observer plusieurs ordres de grandeur de
variation entre des argiles et des roches cristallines [71].
La perméabilité est ainsi majoritairement influencée par la géométrie des pores plutôt
que par la porosité. Un exemple simple de matériaux poreux de porosité j, composé de pores
cylindriques de rayon R et d’axe normal, permet de calculer la perméabilité en utilisant la
formule d’écoulement de Poiseuille [98] (cf Equation 16). La perméabilité est alors
proportionnelle au carré du rayon et ce paramètre joue un rôle prédominant dans la
perméabilité.
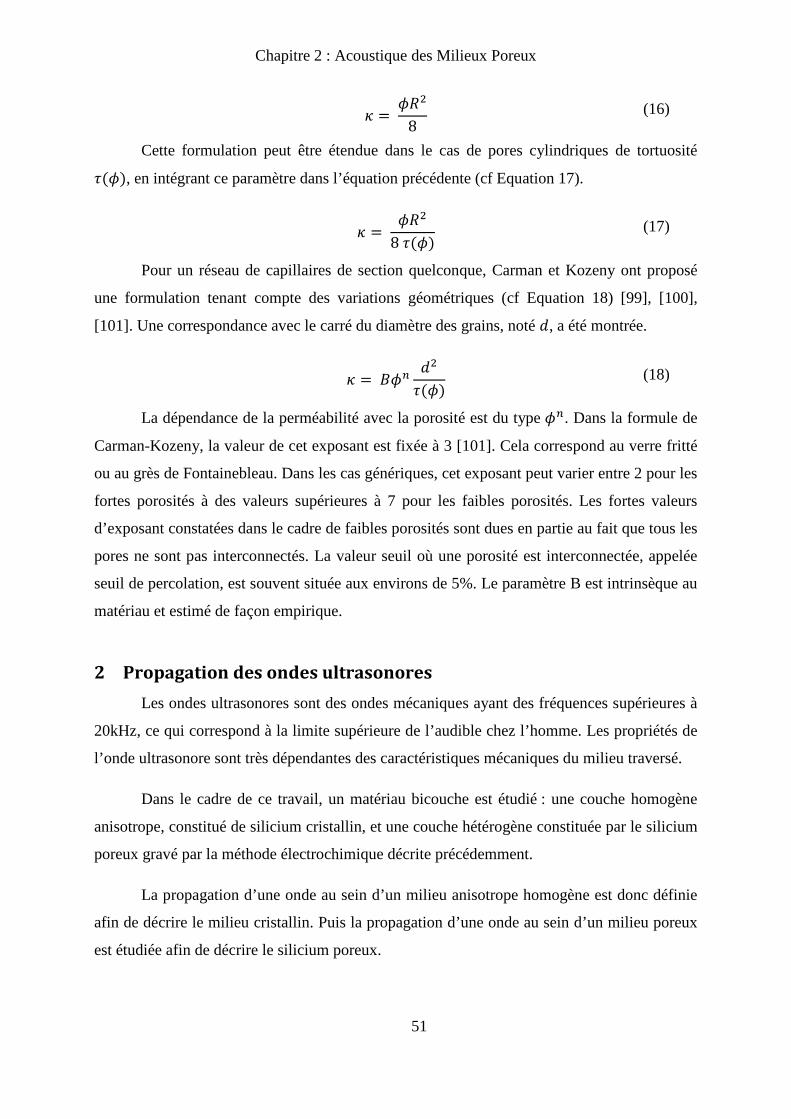
Chapitre 2 : Acoustique des Milieux Poreux
51
p = jr!8 (16)
Cette formulation peut être étendue dans le cas de pores cylindriques de tortuosité t1j3, en intégrant ce paramètre dans l’équation précédente (cf Equation 17).
p = jr!8t1j3 (17)
Pour un réseau de capillaires de section quelconque, Carman et Kozeny ont proposé
une formulation tenant compte des variations géométriques (cf Equation 18) [99], [100],
[101]. Une correspondance avec le carré du diamètre des grains, noté , a été montrée.
p = ujv !t1j3 (18)
La dépendance de la perméabilité avec la porosité est du type jv. Dans la formule de
Carman-Kozeny, la valeur de cet exposant est fixée à 3 [101]. Cela correspond au verre fritté
ou au grès de Fontainebleau. Dans les cas génériques, cet exposant peut varier entre 2 pour les
fortes porosités à des valeurs supérieures à 7 pour les faibles porosités. Les fortes valeurs
d’exposant constatées dans le cadre de faibles porosités sont dues en partie au fait que tous les
pores ne sont pas interconnectés. La valeur seuil où une porosité est interconnectée, appelée
seuil de percolation, est souvent située aux environs de 5%. Le paramètre B est intrinsèque au
matériau et estimé de façon empirique.
2 Propagation des ondes ultrasonores
Les ondes ultrasonores sont des ondes mécaniques ayant des fréquences supérieures à
20kHz, ce qui correspond à la limite supérieure de l’audible chez l’homme. Les propriétés de
l’onde ultrasonore sont très dépendantes des caractéristiques mécaniques du milieu traversé.
Dans le cadre de ce travail, un matériau bicouche est étudié : une couche homogène
anisotrope, constitué de silicium cristallin, et une couche hétérogène constituée par le silicium
poreux gravé par la méthode électrochimique décrite précédemment.
La propagation d’une onde au sein d’un milieu anisotrope homogène est donc définie
afin de décrire le milieu cristallin. Puis la propagation d’une onde au sein d’un milieu poreux
est étudiée afin de décrire le silicium poreux.

Chapitre 2 : Acoustique des Milieux Poreux
52
2.1 Relation de propagation dans un milieu homogène
La propagation d’une onde ultrasonore au sein d’un matériau s’accompagne d’un
déplacement w des particules. Ce déplacement peut aussi être vu comme une déformation, qui
est la dérivée spatiale du déplacement (cf Equation 19).
w,x =yx +zx, yx = 12 w,x + wx,|,
zx = 12 1w,x − wx,3 (19)
Deux tenseurs correspondant à des déplacements apparaissent : yx qui est le tenseur de
Cauchy et qui correspond aux déformations à proprement parler et zx qui correspond aux
opérations de rotation.
Les déformations engendrent des contraintes au sein du matériau. Ces deux quantités
sont liées par la loi de Hooke généralisée dans le cadre de petites déformations (cf Equation
20). Nous avons alors une relation linéaire entre les contraintes, représentées par le tenseur
des contraintes $~ , et les déformations, représentées par le tenseur de Cauchy y7 , via le
tenseur de rigidité$~7. $~ = $~7y7 (20)
Le tenseur de rigidités est un tenseur d’ordre 4, ce qui représente un total de 81
coefficients dans le cadre de déformations en 3 dimensions. Cependant de nombreuses
symétries sont présentes dans ce tenseur, afin de satisfaire notamment les conditions de
conservation de moments angulaires (cf Equation 21). Nous pouvons alors réduire le nombre
de coefficients à un maximum de 21 coefficients indépendants dans le cas de matériaux ayant
une géométrie cristalline triclinique.
$~7 = ~$7 B$~7 = $~7 (21)
Dans le cadre de matériaux isotropes, présentant le maximum de symétries, le nombre
de paramètres indépendants peut être ramené à seulement deux coefficients et , nommés
coefficients de Lamé.
En appliquant le principe fondamental de la dynamique à un volume élémentaire de
masse volumique d, une relation entre la contrainte dans le matériau et l’accélération subie
par ce matériau est obtenue (cf Equation 22).

Chapitre 2 : Acoustique des Milieux Poreux
53
d !$B! = $~,~ (22)
En remplaçant le tenseur des contraintes par le tenseur de Cauchy, grâce à la loi de
Hooke généralisée, une relation reliant la deuxième dérivée temporelle du déplacement à sa
deuxième dérivée spatiale apparait (cf Equation 23). Cette relation est appelée relation
d’Alembert et est présente dans toutes les équations de propagation.
d !$B! = $~7,7~ (23)
Les solutions de cette équation sont présentées sous la forme d’ondes planes
progressives se propageant à une vitesse de phase V et de polarisation ° (cf Equation 24).
Cette fonction présente une périodicité spatiale et temporelle.
= °1B −. ~G 3 (24)
Où est le vecteur unitaire normal au plan de propagation de l’onde. Nous pouvons
définir le vecteur d’onde comme étant le vecteur unitaire normal divisé par la vitesse de
phase (cf Equation 25). Sa norme, le nombre d’onde, correspond au nombre de cycles par
unité de distance.
= G , ; = || (25)
Dans le cadre d’un milieu présentant une atténuation, l’amplitude de l’onde plane
progressive monochromatique suit une loi de décroissance, dit de Lambert-Beer [102], qui
peut se traduire par l’ajout d’un paramètre imaginaire , appelé coefficient d’extinction ou
d’atténuation, dans le nombre d’onde (cf Equation 26).
= 1; + V3 (26)
2.2 Ondes mécaniques dans un milieu poreux
Dans cette partie, des modèles de propagation d’une onde ultrasonore au sein d’un
milieu hétérogène, et plus précisément poreux, sont présentés.
2.2.1 Modèle de Gassmann
Le modèle de Gassmann [103] est un modèle de propagation d’ondes ultrasonores au
sein de matériaux hétérogènes largement utilisé en pétrologie. Ces équations permettent à

Chapitre 2 : Acoustique des Milieux Poreux
54
partir des mesures de vitesses de propagation des ondes dans un milieu poreux saturé avec un
fluide donné de déduire ces mêmes vitesses dans le milieu poreux saturé avec un autre fluide.
En utilisant les relations entre les vitesses de propagation (longitudinale G1(3 et
transversale Ge1(3) et les caractéristiques mécaniques (cf Equation 27), nous pouvons retrouver
les modules effectifs d’élasticité du matériau (Mlk1(3 et lk1(3 ) contenant le premier fluide, de
masse volumique d1(3. Mlk1(3 = d1(3 =G1(3! − 43 Ge1(3!>lk1(3 = d1(3Gl1(3! (27)
A partir de la relation de Gassmann [104] (cf Equation 28), les modules d’élasticité
effectifs Mlk1!3et lk1!3 , ainsi que sa densité d1!3, du milieu saturé par le fluide 2 sont estimés. Il
est à noter que le module de cisaillement est invariant selon le fluide utilisé, le module de
cisaillement des fluides étant considéré comme nul. L’estimation des constantes mécaniques
nécessite la connaissance des constantes mécaniques du matériau saturé et des 2 fluides
saturants ainsi que la porosité du matériau.
Mlk1!3Ml − Mlk1!3 − Mi$1!3
j Ml − Mi$1!3 = Mlk1(3Ml − Mlk1(3 − Mi$1(3
j Ml − Mi$1(3 lk1!3 = lk1(3d1!3 = d1(3 + j1di$1!3 − di$1(3 3
(28)
Les vitesses de propagation de l’onde ultrasonore dans le milieu saturé par le fluide 2
(G1!3BGe1!33 peuvent être déterminées en utilisant les équations suivantes :
Ge1!3 = lk1!3d1!3G1!3 = Mlk1!3 + 43lk1!3
d1!3 (29)
Dans le cas de la pétrologie, des variations de vitesse entre un milieu saturé d’eau ou
de pétrole peuvent être observées. Cependant les caractéristiques mécaniques M et du
matériau sec, c'est-à-dire saturé d’air, peuvent être utilisées pour estimer les paramètres du
matériau une fois saturé d’eau. Les équations précédentes sont ainsi simplifiées car les

Chapitre 2 : Acoustique des Milieux Poreux
55
caractéristiques mécaniques de l’air sont considérées comme négligeables devant celles de
l’eau :
Mlk = =1 − MMl >!jMi$ + 1 − jMl − MMllk = dlk = d + jdi$
(30)
2.2.2 Modèle de Biot
En 1956, Biot proposa un modèle qui prend en compte les mouvements du fluide ainsi
que les mouvements au sein de la matrice solide [105], [106]. En tenant compte de
l’interaction présente à l’interface, un système de deux équations couplées peut être écrit :
d(( wk + d(! k = D∇1∇. w3 + n∇1∇.3 − ∇ ∧ 1∇ ∧ w3d(! wk + d!! k = n∇1∇. w3 + r∇1∇.3 , (31)
où w est le déplacement de la matrice solide et est le déplacement du fluide. Les
masses volumiques effectives sont définies à l’équation 32. Le terme d(!, homogène à une
masse volumique, correspond à l’inertie du fluide. Il dépend de la tortuosité dynamique 1¢3 définie ci-après et de la masse volumique du fluide di. dl est la masse volumique du matériau
solide constituant la matrice.
d(( = 11 − j3dl − d(!d!! = jdi − d(!d(! =−di11¢3 − 13 (32)
Les paramètres D, r et n correspondent aux différentes interactions présentes entre le
fluide et la matrice solide. Ainsi les matrices r et D correspondent respectivement aux
interactions dans le fluide et dans la matrice solide alors que la matrice n traduit les effets de
couplages entre les 2 milieux. Ces paramètres peuvent être déduits à partir de la mesure en
utilisant les « gedanken experiments » [107]. Leurs relations avec les paramètres mécaniques
sont présentées à l’Equation 33.

Chapitre 2 : Acoustique des Milieux Poreux
56
D = 11 − j311 − j − £3Ml + j¤M¥71 − j − £ + j¤ + 43n = 11 − j − £3jMl1 − j − £ + j¤r = j!Ml1 − j − £ + j¤,
£ = M¥7Ml¤ = MlMi$ , (33)
où est le module de cisaillement et Ml , M¥7 et Mi$ sont respectivement les
modules d’élasticité isostatique du solide, de la matrice et du fluide saturant.
Dans le cadre de matériaux poreux saturés par un liquide, les effets thermiques dus
aux déplacements sont considérés comme négligeables car le fluide est peu compressible.
Cependant les effets dissipatifs dus à la viscosité doivent être pris en compte, grâce à
l’intégration de la longueur visqueuse caractéristique Λ . Cet effet est inclus dans la
formulation de la tortuosité dynamique généralisée proposée par Johnson [108] (cf Equation
34).
1¢3 = ¦§1 + Vojdi¢p)1 − 4V¦! p)!dioj!Λ! ¢¨ (34)
où ¦ est la limite de la tortuosité pour une fréquence élevée. Les effets visqueux sont
importants lorsque l’épaisseur de la couche limite visqueuse δ est supérieure ou de l’ordre de
grandeur de la taille des pores (cf Equation 35). Dans le cas contraire, nous observons
principalement un effet inertiel, qui est décrit par la tortuosité ¦. Nous pouvons donc définir
une pulsation ¢4 à partir de laquelle la transition entre régimes visqueux et inertiel a lieu.
© ≥ 2o¢4di ↔ ¢4 ≥ 2odi©! (35)
En utilisant une fonction d’onde plane progressive, le système présenté à l’Equation
31 peut être résolu afin de définir les vitesses de propagation des ondes au sein du milieu
poreux. Ainsi deux modes de propagation longitudinaux et un mode de propagation
transversal apparaissent. La prédiction du mode de propagation longitudinal lent a été
antérieure à son observation [109], ce qui renforce le modèle proposé par Biot.

Chapitre 2 : Acoustique des Milieux Poreux
57
Gl! = 11 − j3dl + =1 − 11¢3>jdiG! = Δ ± «Δ! − 41d((d!! − d(!! 31Dr − n!321d((d!! − d(!! 3Δ = Dd!! + rd(( − 2nd(!
(36)
2.2.3 Modèles semi phénoménologiques
Différents auteurs ont proposé des modèles phénoménologiques pour expliquer la
propagation des ondes ultrasonores au sein d’un matériau poreux. Ces modèles sont utilisés
dans le cas de fluides ayant une compressibilité élevée, ce qui permet de considérer une
matrice indéformable.
Ainsi Delany et Bazley [110] ont proposé une loi empirique pour obtenir une
estimation de l’impédance acoustique complexe et du nombre d’onde complexe dans un
matériau fibreux. Ce modèle montre une bonne concordance avec l’expérience, dans les
limites données par les auteurs. Grâce à sa simplicité et sa facilité d’ajustement, ce modèle est
encore largement utilisé.
¬* = di$*i$1 + 9.08 =10 ®>,).¯° − ±11.9 =10 ®>,).¯; = ¢*i$ ²1 + 10.8 =10 ®>,).¯) − ±10.3 =10 ®>,).°³´ ,0.01 < ® < 1.00
(37)
Un des modèles phénoménologiques les plus élaborés est celui de Johnson-
Champoux-Allard-Pride-Lafarge, qui calcule les densités et les modules d’élasticité
isostatique effectifs. Ce modèle prend en compte les phénomènes visqueux et thermiques qui
ont lieux au sein du milieu poreux [108], [111], [112], [113]. Ce modèle nécessite cependant 8
paramètres, ce qui peut compliquer une procédure d’ajustement.
2.3 Conclusion
Au sein de cette partie, les modèles de propagation au sein d’un matériau poreux ont
été présentés. Cependant il est à observer que ces modèles nécessitent de nombreux
paramètres d’entrée qui peuvent être déduits de la microgéométrie (cas de la longueur
visqueuse caractéristique) ou de la forme des pores (cas de la tortuosité). Cependant certains
paramètres, comme les constantes mécaniques de la matrice, restent difficile à estimer.

Chapitre 2 : Acoustique des Milieux Poreux
58
3 Détermination des constantes mécaniques de la matrice
Nous l’avons vu dans le paragraphe précédent, les équations données par Biot
permettant de modéliser la propagation d’une onde au sein d’un milieu poreux nécessitent la
détermination à priori de nombreux paramètres tels que les constantes mécaniques de la
matrice vide de son fluide, et M¥7. L’estimation de ces paramètres est essentielle mais est
difficile à mettre en place expérimentalement. Afin de pouvoir les estimer de façon
numérique, plusieurs méthodes d’homogénéisation de la matrice vide ont été développées.
Dans ce chapitre, la notion de volume élémentaire est explicitée. Puis les limites
usuelles des constantes mécaniques d’un milieu diphasique ainsi que les méthodes
d’estimation desdites constantes sont présentées.
3.1 Notion de volume élémentaire représentatif
Le volume élémentaire représentatif (VER) est le volume permettant de modéliser le
comportement macroscopique du matériau étudié. Ainsi un milieu hétérogène peut être
considéré comme un milieu homogène ayant les propriétés macroscopiques observées sur le
VER. Ce phénomène est toujours observé, de façon explicite (prise en compte des joints de
grains, de la porosité) ou implicite (échelle atomique, étude de la pression).
Afin de permettre cette extrapolation, certaines règles doivent être observées :
• Volume minimal d’homogénéité : afin de pouvoir considérer le milieu étudié
comme continu et donc d’utiliser les lois de la mécanique, il faut que les
variables d’état de ce milieu, comme la raideur ou la viscosité, puissent être
étudiées en chaque point grâce à des fonctions dérivables. Cependant un milieu
hétérogène a par définition une variation abrupte desdites propriétés, au niveau
de ses interfaces. Afin de s’affranchir de ses variations, il faut moyenner les
propriétés du matériau autour d’un rayon suffisamment grand pour permettre la
convergence de cette propriété vers une valeur limite.
• Continuité des phases : La continuité des phases est essentielle pour modéliser
les phénomènes thermodynamiques. En effet, si les phases ne sont pas
connectées, les perturbations ne se propagent pas et donc les phénomènes
observés au sein du VER diffèrent du reste du matériau. Un autre point
important est la taille des pores qui doit être suffisamment grande par rapport
au libre parcours moyen (correspondant à la distance moyenne de déplacement

Chapitre 2 : Acoustique des Milieux Poreux
59
sans interaction) afin de considérer un milieu continu à l’échelle
microscopique.
• Grande longueur d’onde : la longueur d’onde doit être suffisamment grande
par rapport au VER afin que les discontinuités dues aux hétérogénéités ne
soient pas du même ordre de grandeur. Si cette condition n’est pas satisfaite,
l’onde mécanique subira des diffractions au niveau des interfaces.
• Symétrie : le milieu doit présenter des symétries afin que le VER sélectionné
soit représentatif du reste du volume. Dans ce cadre, on pourra dire que le VER
est invariant par symétrie.
3.2 Limites mécaniques
3.2.1 Fonctions usuelles
L’homogénéisation s’applique à un matériau hétérogène afin de le ramener à un milieu
homogène équivalent que l’on appelle matériau effectif. Dans le cadre de matériaux isotropes,
les propriétés mécaniques du matériau effectif peuvent être étudiées à partir des coefficients
de Lamé, et , où le paramètre correspond au module de cisaillement du matériau. Le
module d'élasticité isostatique K, qui traduit le déplacement sous une pression hydrostatique,
peut être déduit de ces deux constantes grâce à la formule suivante :
M = +23 (38)
Dans le cadre des méthodes d’homogénéisation des constantes mécaniques, Berryman
[114] a proposé un formalisme basé sur des formules génériques, permettant de simplifier et
de généraliser les formules d’homogénéisation, nommées Λ, Γ et · :
Λ1u3 = ⟨ 1K1r3 + 43u⟩,( −43@, (39)
Γ1½3 = ⟨ 11A3 + ½⟩,( − ½, ·1M, 3 = 6 =9M + 8M + 2 >. (40)

Chapitre 2 : Acoustique des Milieux Poreux
3.2.2 Limites de Reuss et de Voigt
Figure 31 : Cas extrêmes rencontrés lors de l'homogénéisation : forces s’appliquant dans le plan des couches (a),
perpendiculairement aux couches (b), équivalent aux suspensions dans un fluide (c).
Dans le cadre de l’homogénéisation des constantes mécaniques, le modèle le plus
simple consiste à considérer un milieu hétérogène composé de couches successives de chaque
espèce, et dont l’épaisseur est proportionnelle à la fraction volumique de chaque espèce. Dans
cette configuration, deux cas extrêmes peuvent être observés
plan des couches et les forces s’appliquant dans le plan perpendiculaire aux couches, comme
présenté Figure 31. Le cas des suspe
s’appliquent dans le plan perpendiculaire aux couches, la condition d’iso
alors conservée.
Dans le premier cas, nous avons une configuration où le déplacement est le même pour
les 2 espèces, mais la contrainte subie par chaque espèce diffère. Ce constat amène à faire
une moyenne arithmétique, pondérée par leurs fractions volumiques respectives, des modules
d’élasticité isostatique d’une part et de cisaillement d’autre part (cf Equat
des constantes mécaniques obtenues (
correspondent à la valeur maximale desdites constantes
valeurs effectives réelles du module de cisaillement (
isostatique (K¾¿¿).
Dans le deuxième cas, les contraintes subies par les différentes couches sont
identiques mais les déplacements de chaque couche diffèrent. Ce constat amène à faire une
Chapitre 2 : Acoustique des Milieux Poreux
60
s et de Voigt
rencontrés lors de l'homogénéisation : forces s’appliquant dans le plan des couches (a),
perpendiculairement aux couches (b), équivalent aux suspensions dans un fluide (c).
Dans le cadre de l’homogénéisation des constantes mécaniques, le modèle le plus
ple consiste à considérer un milieu hétérogène composé de couches successives de chaque
espèce, et dont l’épaisseur est proportionnelle à la fraction volumique de chaque espèce. Dans
cette configuration, deux cas extrêmes peuvent être observés : les forces s’appliquant dans le
plan des couches et les forces s’appliquant dans le plan perpendiculaire aux couches, comme
Le cas des suspensions dans un fluide est équivalent au cas où les forces
s’appliquent dans le plan perpendiculaire aux couches, la condition d’iso
Dans le premier cas, nous avons une configuration où le déplacement est le même pour
espèces, mais la contrainte subie par chaque espèce diffère. Ce constat amène à faire
une moyenne arithmétique, pondérée par leurs fractions volumiques respectives, des modules
d’élasticité isostatique d’une part et de cisaillement d’autre part (cf Equation
des constantes mécaniques obtenues (MEg$Àk et Eg$Àk ) sont appelées bornes de Voigt et
correspondent à la valeur maximale desdites constantes [115]. Elles sont donc supérieures aux
valeurs effectives réelles du module de cisaillement ( μ¾¿¿ ) ou du module d’élasticité
MEg$Àk = ⟨M1A3⟩ = Λ1∞3 ≥ K¾¿¿Eg$Àk = ⟨1A3⟩ = Γ1∞3 ≥ μ¾¿¿ Dans le deuxième cas, les contraintes subies par les différentes couches sont
identiques mais les déplacements de chaque couche diffèrent. Ce constat amène à faire une
rencontrés lors de l'homogénéisation : forces s’appliquant dans le plan des couches (a),
perpendiculairement aux couches (b), équivalent aux suspensions dans un fluide (c).
Dans le cadre de l’homogénéisation des constantes mécaniques, le modèle le plus
ple consiste à considérer un milieu hétérogène composé de couches successives de chaque
espèce, et dont l’épaisseur est proportionnelle à la fraction volumique de chaque espèce. Dans
s’appliquant dans le
plan des couches et les forces s’appliquant dans le plan perpendiculaire aux couches, comme
nsions dans un fluide est équivalent au cas où les forces
s’appliquent dans le plan perpendiculaire aux couches, la condition d’iso-contrainte étant
Dans le premier cas, nous avons une configuration où le déplacement est le même pour
espèces, mais la contrainte subie par chaque espèce diffère. Ce constat amène à faire
une moyenne arithmétique, pondérée par leurs fractions volumiques respectives, des modules
ion 41). Les valeurs
sont appelées bornes de Voigt et
. Elles sont donc supérieures aux
) ou du module d’élasticité
(41)
Dans le deuxième cas, les contraintes subies par les différentes couches sont
identiques mais les déplacements de chaque couche diffèrent. Ce constat amène à faire une

Chapitre 2 : Acoustique des Milieux Poreux
61
moyenne géométrique des constantes mécaniques (cf Equation 42). Les valeurs des constantes
mécaniques (MHll et Hll), appelées bornes de Reuss, correspondent aux valeurs les plus
faibles desdites constantes [116]. Cette condition d’isocontrainte est observée dans le cas de
suspensions et cette borne devient alors une estimation assez fidèle de la valeur des constantes
mécaniques.
MHll = ⟨ 1M1A3⟩ = Λ103 ≤ K¾¿¿Hll = ⟨ 11A3⟩ = Γ103 ≤ μ¾¿¿ (42)
3.2.3 Limites de Hashin-Strikman
Hashin et Strikman [117] ont proposé une méthode d’homogénéisation basée
sur la croissance d’une ou plusieurs couronnes d’espèces différentes autour d’une sphère
constituée d’une espèce dite hôte (cf Figure 32). Leur volume respectif correspond alors à leur
fraction volumique dans le matériau hétérogène. Les valeurs des constantes homogénéisées MTe± et Te± sont données à l’équation suivante :
MTe, = Λ1μÃÄÅ3, Te, = Γ·1MÆ$v, Æ$v3|MTe# = Λ1μÃÇÈ3, Te# = Γ·1MÆÉ, ÆÉ3| (43)
Figure 32 : Disposition des espèces dans la méthode d'homogénéisation proposée par Hashin-Strikman.
La borne maximale est atteinte lorsque l’espèce hôte est la plus rigide et la borne
minimale est atteinte lorsque l’espèce hôte est la moins rigide. Cette représentation permet de
définir des bornes plus restreintes que les représentations de Voigt et de Reuss et décrivent les
valeurs minimales et maximales de constantes mécaniques rencontrées dans un milieu
isotrope avec des inclusions sphériques.

Chapitre 2 : Acoustique des Milieux Poreux
62
M,Te ≤ K¾¿¿ ≤ M#Te,Te ≤ μ¾¿¿ ≤ #Te (44)
3.3 Estimation de Voigt-Reuss-Hill
Hill a montré que les bornes de Voigt et de Reuss étaient respectivement les bornes
supérieures et inferieures des modules de cisaillement et d’élasticité isostatique [118]. Il a
émis l’hypothèse que la moyenne arithmétique de ces deux bornes constituait une estimation
desdits modules. Cette approximation a été étudiée par Brace [119], qui a démontré que cette
approximation donnait de bons résultats pour les roches ayant une faible porosité. Les valeurs
des constantes mécaniques homogénéisées MEHT et EHT sont rappelées ci-dessous :
MEHT =MEg$Àk + MHll2 = Λ103 + Λ1∞32μEHT = Eg$Àk + Hll2 = Γ103 + Γ1∞32 (45)
3.4 Estimations dans le cas d’inclusions sphériques
De nombreux auteurs ont essayé d’estimer les propriétés mécaniques de matériaux
contenant des occlusions sphériques. Cette représentation est souvent utilisée pour idéaliser
les matériaux hétérogènes lorsque le facteur de forme des inclusions, qui est le rapport des
longueurs extrêmes, n’est pas très élevé.
3.4.1 Kuster et Toksöz (KT)
Kuster et Toksöz ont proposé une généralisation de la méthode de Hashin-Strikman à
un nombre quelconque d’espèces [120]. Elle considère alors une seule espèce comme hôte (cf
Equation 46). Cette formulation a l’avantage principal d’être explicite mais est limitée par le
fait qu’elle a autant d’estimations possibles que de constituants dans le matériau hétérogène.
Les bornes de Hashin-Strikman sont atteintes si l’espèce hôte choisie est la plus rigide ou la
moins rigide.
MÊ8∗ = Λ1μËÌ;3Ê8∗ = Γ·1MÎgk , Îgk3| (46)
3.4.2 Self Consistent Approximation (SCA)
Cette méthode a été proposée par Berryman [121] afin de permettre une estimation
unique des caractéristiques mécaniques du matériau homogénéisé, quelque soit le nombre de
constituants dans le matériau hétérogène. Le but de cette méthode est de considérer un

Chapitre 2 : Acoustique des Milieux Poreux
63
matériau hôte qui est la solution du couple d’équations formulé à l’Equation 47. Cette
méthode n’est donc pas explicite et nécessite un certain nombre d’itérations afin de trouver le
couple de valeurs Me:∗ et μÏÐ∗ correspondant au matériau homogénéisé. Dans le cas de modules
de cisaillement et d’élasticité isostatique positifs, il n’existe qu’un seul couple stable et nous
avons alors une solution qui ne considère aucune espèce comme hôte en particulier.
Me:∗ = Λ1μÏÐ∗ 3μÏÐ∗ = Γ·1Me:∗ , μÏÐ∗ 3| (47)
3.4.3 Differential Effective Medium (DEM)
Cette méthode a été développée selon une idée proposée par Bruggeman et s’applique
uniquement aux milieux constitués de 2 espèces [122], [123]. Dans cette méthode, les
constantes mécaniques de l’espèce hôte (M( et ( ) sont utilisées. L’homogénéisation est
effectuée en provoquant à chaque fois une légère variation de la fraction volumique C de la
deuxième espèce, ayant les constantes mécaniques M! et ! (cf Equation 48). Les
caractéristiques mécaniques du matériau effectif (M0 et 0) doivent être connues pour une
valeur donnée de porosité, qui peut cependant être la valeur nulle.
11 − C3 C M0∗1C3 = M! −M0∗1C3M! + 430∗ 1C3ÑM0∗1C3 +430∗ 1C3Ò
11 − C3 C 0∗ 1C3 = ! − 0∗ 1C3! + ·1M0∗1C3, 0∗ 1C330∗ 1C3 + ·1M0∗1C3, 0∗ 1C33 (48)
Cette méthode nécessite le calcul en parallèle des deux composantes mécaniques car
les deux équations sont couplées. De plus, elles ne donnent pas le même résultat selon le
choix de l’espèce hôte et nous n’avons pas d’unicité de la solution, comme pour la Self
Consistent Approximation.
3.5 Estimations dans le cas d’inclusions non sphériques
Dans la plupart des systèmes réels, les inclusions ne présentent pas une forme
sphérique et il peut devenir nécessaire d’homogénéiser un matériau ayant des inclusions non
sphériques. Les formes typiquement étudiées sont les cylindres et les fissures.
Les méthodes SCA et KT peuvent ainsi être généralisées en utilisant des fonctions qui
permettent de moduler les constantes élastiques. Ces fonctions sont respectivement D$Æ et n$Æ
pour les modules d’élasticité isostatiques et les modules de cisaillement. Elles sont basées sur
des travaux de Eshelby [124] sur les inclusions ellipsoïdales et ont été généralisées par Kuster

Chapitre 2 : Acoustique des Milieux Poreux
64
et Toksöz [120] ainsi que Berryman [125]. Les formulations de ces fonctions pour les
différentes formes de pores sont données au Tableau 6.
Tableau 6 : Formulation des fonctions et selon la forme des pores considérés.
Forme D$Æ n$Æ
Sphères MÆ + 43ÆM$ + 43Æ
Æ + ·Æ$ + ·Æ
Disque MÆ + 43$M$ + 43$
Æ + ·$$ + ·$
Cylindre MÆ + Æ + 13$M$ + Æ + 13$
15 1 4ÆÆ + $ + 2Æ + aÆ$ + aÆ + M$ + 43ÆM$ + Æ + 13$3 Penny
crack
MÆ + 43$M$ + 43$ + ÓÔÆ
15 11 + 8Æ4$ + Ó1Æ + 2ÔÆ3+ M$ + 23 1Æ + $3M$ + 43$ + ÓÔÆ3
Où les fonctions a et Ô sont explicitées ci dessous :
a1, M3 = 3M + 3M + 7Ô1, M3 = 3M + 3M + 4 (49)
La formulation pour la méthode KT reste explicite et le cas des inclusions sphériques
peut être retrouvé en reprenant les fonctions D$Æ et n$Æ correspondantes (cf Equation 50). +
correspond aux constantes de la matrice et V à celles des différentes espèces présentes en
inclusion.
1MÊ8∗ − MÆ3 MÆ + 43ÆMÊ8∗ + 43Æ =ÕÖ$1M$ − MÆ3D$Æ×$
1Ê8∗ − Æ3 Æ + ·ÆÊ8∗ + ·Æ =ÕÖ$1$ − Æ3n$Æ×$
(50)
La formulation pour la méthode SCA reste implicite et nécessite donc des itérations
pour pouvoir estimer les constantes mécaniques Me:∗ et e:∗ (cf Equation 51). Comme dans le

Chapitre 2 : Acoustique des Milieux Poreux
65
cas des inclusions sphériques, la solution reste symétrique et unique. L’astérisque des
fonctions D$∗ et n$∗ renvoie aux paramètres homogénéisés Me:∗ et e:∗ .
ÕÖ$1M$ − Me:∗ 3D$∗×$ = 0ÕÖ$1$ − e:∗ 3n$∗×$ = 0 (51)
3.6 Application au silicium poreux
Les formulations proposées ci-dessus sont appliquées au cas du silicium poreux qui a
été gravé pour cette thèse, sur une plaquette de silicium cristallin. L’échantillon est alors
composé d’une épaisseur de silicium poreux et d’une épaisseur de silicium cristallin. Afin de
déterminer le comportement de cet échantillon sous l’excitation d’une onde ultrasonore, nous
devons connaitre le comportement dans la partie poreuse en fonction de la porosité ainsi que
l’épaisseur de la couche poreuse.
Pour cela, les paramètres du silicium poreux sont tout d’abord estimés en utilisant les
caractéristiques géométriques du matériau mésoporeux qui a été gravé et le modèle de Biot.
Ainsi les paramètres géométriques, tels que la tortuosité ou la perméabilité, et les constantes
mécaniques de la matrice sont calculés en fonction de la porosité de la couche. Les vitesses de
propagation des ondes sont alors déduites et une comparaison est effectuée avec les mesures
de Da Fonseca effectuées par microscope acoustique [126].
3.6.1 Estimation de la tortuosité et de la perméabilité
Dans le cadre du silicium poreux, les fonctions logarithmiques proposées par
Boudreau ont été utilisées (cf Equation 52) et le paramètre d’ajustement L a été fixé à 2/3, ce
qui correspond à des pores cylindriques [94].
¦ = 1 − L. ln1j3 (52)
Connaissant la tortuosité, l’Equation 17 permet d’estimer la perméabilité p). La taille
des pores observés dans le silicium poreux gravé au laboratoire est aux environs de 20 nm de
diamètre. Ainsi la valeur de la longueur caractéristique visqueuse est fixée à 10 nm.
Les résultats de ces estimations sont présentés à la Figure 33. Nous pouvons observer
que les valeurs de tortuosité augmentent fortement pour de faibles porosités, ce qui s’explique
par le fait que les pores ne sont pas interconnectés dans le modèle. Dans les gammes de

Chapitre 2 : Acoustique des Milieux Poreux
porosités rencontrées dans le silicium poreux
de tortuosité varie lentement et est comprise entre 1,3 et 1,8. La perméabilité quant à elle est
très faible, de l’ordre de grandeurs de la dizaine de microDarcy. Ces valeurs sont proches de
ce qu’on observe dans des argiles, roch
taille des pores.
Figure 33 : Estimation de la tortuosité (a) et de la perméabilité (b) en fonction de la porosité
Grâce à l’Equation 34, la tortuosité dynamique peut alors ê
possède des caractéristiques proches de l’eau car c’est une solution aqueuse. Ainsi la viscosité o est fixée à 1 mPa.s, soit 1 Poiseuille, et la masse volumique
de la tortuosité dynamique en
présentée sur la Figure 34. La transition entre les régimes visqueux et inertiel est clair
visible et correspond à une fréquence de coupure autour de 10
largement supérieure à celles des ondes ultrasonores utilisées, c’est le régime visqueux qui est
observé dans nos expériences. L’évolution de ce paramètre en fon
fréquence de 20MHz est présentée à la
importantes que dans le cas de la to
Chapitre 2 : Acoustique des Milieux Poreux
66
porosités rencontrées dans le silicium poreux au sein du laboratoire (de 30 à 60%), la valeur
de tortuosité varie lentement et est comprise entre 1,3 et 1,8. La perméabilité quant à elle est
très faible, de l’ordre de grandeurs de la dizaine de microDarcy. Ces valeurs sont proches de
ce qu’on observe dans des argiles, roches qui sont peu perméables, ce qui s’explique par la
stimation de la tortuosité (a) et de la perméabilité (b) en fonction de la porosité
, la tortuosité dynamique peut alors être estimée. Le fluide utilisé
possède des caractéristiques proches de l’eau car c’est une solution aqueuse. Ainsi la viscosité
est fixée à 1 mPa.s, soit 1 Poiseuille, et la masse volumique dià 1000 kg/m
de la tortuosité dynamique en fonction de la fréquence pour une porosité fixée à 50 % est
. La transition entre les régimes visqueux et inertiel est clair
visible et correspond à une fréquence de coupure autour de 1011Hz. Cette fréquence étant
largement supérieure à celles des ondes ultrasonores utilisées, c’est le régime visqueux qui est
observé dans nos expériences. L’évolution de ce paramètre en fonction de la porosité pour une
fréquence de 20MHz est présentée à la Figure 34. Les tortuosités observées sont plus
importantes que dans le cas de la tortuosité ¦, ce qui est conforme aux attentes.
(de 30 à 60%), la valeur
de tortuosité varie lentement et est comprise entre 1,3 et 1,8. La perméabilité quant à elle est
très faible, de l’ordre de grandeurs de la dizaine de microDarcy. Ces valeurs sont proches de
es qui sont peu perméables, ce qui s’explique par la
stimation de la tortuosité (a) et de la perméabilité (b) en fonction de la porosité.
tre estimée. Le fluide utilisé
possède des caractéristiques proches de l’eau car c’est une solution aqueuse. Ainsi la viscosité
à 1000 kg/m3. L’évolution
fonction de la fréquence pour une porosité fixée à 50 % est
. La transition entre les régimes visqueux et inertiel est clairement
Hz. Cette fréquence étant
largement supérieure à celles des ondes ultrasonores utilisées, c’est le régime visqueux qui est
ction de la porosité pour une
. Les tortuosités observées sont plus
, ce qui est conforme aux attentes.

Chapitre 2 : Acoustique des Milieux Poreux
Figure 34 : Estimation de la tortuosité dynamique en fonction de la fréquence pour une porosité de 50% (a) et en
fonction de la porosité pour une fréquence de 20 MHz (b)
3.6.2 Estimation des constantes mécaniques de la
Les constantes mécaniques sont estimées en utilisant les modèles d’homogénéisation
présentés précédemment. La géométrie des pores étant cylindrique, les fonctions d’ajustement
correspondantes sont utilisées lorsque cela est possible. Les constantes mécaniques utilisées
sont rappelées au Tableau 7.
Tableau 7 : Constantes mécaniques
Matériau
Silicium (100)
eau
Chapitre 2 : Acoustique des Milieux Poreux
67
stimation de la tortuosité dynamique en fonction de la fréquence pour une porosité de 50% (a) et en
fonction de la porosité pour une fréquence de 20 MHz (b).
Estimation des constantes mécaniques de la matrice
Les constantes mécaniques sont estimées en utilisant les modèles d’homogénéisation
. La géométrie des pores étant cylindrique, les fonctions d’ajustement
correspondantes sont utilisées lorsque cela est possible. Les constantes mécaniques utilisées
onstantes mécaniques du silicium (100) et de l’eau à 20°C
Module
d’élasticité
isostatique (GPa)
Module de
cisaillement (Gpa)
Silicium (100) 97 51
2,2 0
stimation de la tortuosité dynamique en fonction de la fréquence pour une porosité de 50% (a) et en
Les constantes mécaniques sont estimées en utilisant les modèles d’homogénéisation
. La géométrie des pores étant cylindrique, les fonctions d’ajustement
correspondantes sont utilisées lorsque cela est possible. Les constantes mécaniques utilisées
du silicium (100) et de l’eau à 20°C.
cisaillement (Gpa)

Chapitre 2 : Acoustique des Milieux Poreux
68
Figure 35 : Estimation du module de cisaillement (a) et du module d’élasticité isostatique (b) de la matrice vide en
utilisant les différentes méthodes d'homogénéisation présentées en section 3.
Le résultat de l’estimation pour les différentes méthodes d’homogénéisation est
présenté sur la Figure 35. Les bornes de Voigt et de Reuss sont ajoutées afin d’effectuer un
encadrement des constantes mécaniques. Les constantes mécaniques de l’air étant très faibles
comparées à celles du silicium cristallin, les bornes sont très éloignées. Les méthodes où la
géométrie cylindrique a été prise en compte sont annotées de la lettre N, pour Needles.
La méthode SCAN donne une rigidité mécanique comparativement plus faible que
celles des méthodes KTN et DEM. Cela est dû au fait que la méthode SCA ne considère pas
d’espèce hôte et donc que les constantes mécaniques de l’air sont largement prises en compte,
ce qui amène un biais dans la simulation.
Les méthodes KTN et DEM donnent des résultats très similaires, bien que la géométrie
des pores ne soit pas prise en compte dans la méthode DEM. Pour la suite des calculs, la
méthode DEM sera utilisée pour déterminer les constantes mécaniques car elle permet un
calcul plus rapide.
3.6.3 Comparaison avec l’expérience
Figure 36 : Estimation de la vitesse des ondes longitudinales selon le modèle de Biot @ 600 MHz et comparaison avec
les mesures effectuées par Da Fonseca.
Une fois les paramètres du modèle de Biot estimés, le calcul des différentes vitesses de
propagation peut être effectué en utilisant l’Equation 36. Afin de vérifier la cohérence de
l’estimation des paramètres, une comparaison est effectuée avec les mesures de Da Fonseca.
Dans ces expérimentations, Da Fonseca utilise des ondes ultrasonores ayant une fréquence

Chapitre 2 : Acoustique des Milieux Poreux
69
centrale de 600MHz et Le silicium poreux est proche de celui utilisé dans cette étude (p+, 10-2
Ω.cm). Les résultats des mesures de la vitesse des ondes longitudinales rapide et lente en
fonction de la porosité, présentés sur la Figure 36 , montrent une bonne correspondance avec
les estimations.
En considérant une fréquence centrale de 20 MHz, qui est celle de nos transducteurs,
une diminution significative de la vitesse de l’onde lente est observée (Figure 37).
Figure 37 : Comparaison de la vitesse de propagation des ondes longitudinales selon le modèle de Biot à 20 MHz et
600 MHz.
La très faible vitesse de l’onde lente à cette fréquence, comparée à celle de l’onde
rapide, empêche sa mesure car le temps d’arrivée de cette onde sera trop élevé
comparativement à celui d’un aller retour de l’onde rapide dans le matériau. Ainsi le milieu
poreux sera considéré comme étant traversé uniquement par l’onde rapide lorsque la
fréquence d’excitation est de 20 MHz.
3.7 Conclusion
Dans cette partie, les différentes méthodes d’homogénéisation ont été présentées et
leurs résultats ont été comparés. Cela a permis de sélectionner la méthode DEM comme
méthode d’homogénéisation pour les constantes mécaniques de la matrice vide. Les valeurs
expérimentales correspondant aux mesures faites par Da Fonseca ont ensuite été comparées
au modèle de Biot en utilisant les constantes simulées et les conditions de mesures de Da
Fonseca. Une bonne adéquation entre les vitesses expérimentales et théoriques est montrée
aussi bien pour l’onde rapide que pour l’onde lente. En utilisant les mêmes constantes
mécaniques mais les conditions de mesures de nos expériences, une diminution importante de

Chapitre 2 : Acoustique des Milieux Poreux
70
la vitesse de l’onde lente est observée. Cela permet d’approximer le milieu poreux par un
milieu homogène.
4 Modélisation d’une onde ultrasonore à travers un matériau
bicouche
La couche poreuse pouvant être considérée comme étant un milieu homogène dont la
vitesse de propagation de l’onde longitudinale est égale à celle de l’onde rapide du modèle de
Biot, l’échantillon de silicium gravé peut être modélisé comme un milieu bicouche homogène.
Ainsi en utilisant un formalisme matriciel, le comportement fréquentiel d’un matériau
bicouche est calculé.
4.1 Propagation dans une couche homogène
Dans cette partie, la propagation d’une onde plane progressive de direction Ú au
travers d’un milieu isotrope est décrite. Afin de simplifier la lecture dans la suite de ce
chapitre et de se rapprocher du formalisme présenté dans l’article de Cervenka [127], le
formalisme de champ vectoriel est utilisé pour le déplacement . Le champ de déplacement
est alors décomposé en la somme du gradient d’un champ scalaire j et la divergence d’un
champ vectoriel Û (cf Equation 53).
= ∇j + ∇ ∧ Û (53)
Ce champ de déplacement est projeté sur l’axe de propagation Ú et sur le plan de
l’onde, représenté par le vecteur . Les composantes @Ü et @É sont extraites et explicitées à
l’équation suivante :
@Ü =∂j∂z − ∂ß∂x , @É =∂j∂z + ∂ß∂x , ß = Û. Ú (54)
La contrainte est liée au déplacement par la loi de Hooke généralisée. Dans le cadre
d’un milieu isotrope, seules deux composantes de raideur et sont nécessaires pour décrire
le milieu. Ces coefficients sont dits de Lamé.
<ÜÜ = ±¢ ²1 + 23 !j½! + !jÖ! + 2 á !ß½Öâ´ ,
<ÜÉ = ± ¢ 12 !j½Ö + !ßÖ! − !ß½! 3 (55)

Chapitre 2 : Acoustique des Milieux Poreux
71
Le nombre d’onde est un paramètre qui dépend de la fréquence de l’onde et des
caractéristiques du matériau et dont les relations pour l’onde de cisaillement et de
compression sont présentées à l’Equation 56. Lorsque l’onde a un angle d’incidence non nul,
le vecteur d’onde peut se décomposer en une composante selon Ú , notée ;Ü , et une
composante selon , notée M (cf Equation 57).
; = d¢! + 2 , ;e =d¢! (56)
||! =;Ü! +M! (57)
A partir de ces relations, les champs scalaires et vectoriels composant le champ de
déplacement sont définis et explicités par le système d’équations suivant :
j = b# ~7ãäÜ + b, ,~7ãäÜ~1ÊÉ,åk3ß = æb#e~7ãçÜ + b,e,~7ãçÜè ~1ÊÉ,åk3 (58)
Par la suite la notation en somme et en différence des champs j et ß est utilisée,
respectivement Ué et êé. U représente le mode de propagation de l’onde ultrasonore, S étant
le mode transversal et L le mode longitudinal. Grâce à cette notation, la propagation de l’onde
au sein d’un milieu homogène et isotrope peut être écrite sous forme matricielle :
Ué =b#é~7ãëÜ + b,é,~7ãëÜ , êé =b#é~7ãëÜ − b,é,~7ãëÜ (59)
æUéêéèÜìÜí# = Dé13 æUéêéèÜìÜí (60)
Où Dé13 est la matrice de propagation de l’onde ultrasonore selon l’axe de
propagation Ú sur une distance :
Dé13 = ÑNé13 Ué13Ué13 Né13Ò ,Né13 = cosh1±;Üé3 = cos1;Üé3Ué13 = sinh1±;Üé3 = ± sin1;Üé3 (61)
4.2 Application à un multicouche
Lorsque l’étude de la propagation d’une onde ultrasonore est effectuée dans un
matériau multicouche, il est nécessaire de considérer non seulement la propagation de l’onde
dans chaque milieu, mais aussi des phénomènes de transmission et de réflexion au niveau des
interfaces.

Chapitre 2 : Acoustique des Milieux Poreux
72
Au niveau d’une interface, les déplacements et les contraintes s’égalisent dans chaque
milieu. L’égalité sous forme matricielle entre le milieu et le milieu + 1 à l’interface de
coordonnée ½ = ½) peut alors être écrite (cf Equation 62).
ó @É@Ü¢<Ü¢<ÉôÜìÜí×#(
= ó @É@Ü¢<Ü¢<ÉôÜìÜí×
(62)
Une nouvelle matrice õ peut être écrite afin de relier l’amplitude des ondes
ultrasonores aux contraintes et aux déplacements subis dans le milieu.
ó @É@Ü¢<Ü¢<ÉôÜìÜí×
= õ óUêêeUe ôÜìÜí×
(63)
Ainsi les déplacements d’une face par rapport à ceux observés sur la face opposée
peuvent être calculés grâce à une matrice de transfert b13. Cette matrice prend en compte le
passage de la matrice de contrainte/déformation à la matrice des amplitudes, la propagation de
l’onde au sein du milieu et le passage de la matrice des amplitudes à la matrice des
contraintes/déformations.
ó @É@Ü¢<Ü¢<ÉôÜìÜí#×
= b13 ó @É@Ü¢<Ü¢<ÉôÜìÜí×
, b13 = õD13õ,( (64)
Considérant les conditions aux interfaces, une matrice de transfert A à travers un
ensemble de n couches peut être créée :
ó @É@Ü¢<Ü¢<ÉôÜìÜ÷×
= A ó @É@Ü¢<Ü¢<ÉôÜìÜí)
, ø =ùaÄ1dÄ3ÅÄì( (65)
Les couches d’entrée de sortie de l’onde ultrasonore sont spécifiques car elles
correspondent à deux espaces semi infinis. Ainsi dans le cas du milieu d’entrée, l’amplitude
incidente reste inchangée, quelque soit la part réfléchie du signal. Cela équivaut à dire que la
partie réfléchie à la première interface n’est jamais réfléchie par la suite. Dans le cas du milieu

Chapitre 2 : Acoustique des Milieux Poreux
73
de sortie, il n’existe pas de signal réfléchi. Une matrice d’entrée ü et une matrice de sortie @B qui prennent en compte ces spécificités peuvent alors être définies.
En regroupant toutes les matrices précédemment décrites, une matrice de transfert ý
entre les ondes présentes dans le milieu d’entrée, ondes incidentes et réfléchies, à celles
transmises dans le milieu de sortie peut être écrite (cf Equation 66). Les amplitudes des ondes
longitudinale et transversale incidentes sont respectivement Φ et Ψ.
óΦbΨbeô = ý ²bkbke´ , ý = üø@B (66)
5 Conclusion
Ce chapitre a porté sur l'acoustique des milieux poreux. Les matériaux poreux, et en
particulier leurs grandeurs caractéristiques telles que la porosité, la tortuosité ou la
perméabilité, ont été définies. Les méthodes permettant la détermination de ces différents
paramètres, par mesure ou par estimation, ont été décrites.
La propagation d'une onde acoustique dans ces milieux poreux a été décrite. Pour cela,
la propagation d'une onde ultrasonore dans un milieu homogène a été étudiée et les différents
modèles d'homogénéisation comme le modèle de Gassman ou de Biot ont été explicités.
Les constantes mécaniques du milieu ont été estimées grâce à la méthode DEM afin de
pouvoir étudier le cas de la propagation des ultrasons dans une couche de silicium poreux. La
tortuosité et la perméabilité ont été estimées en utilisant les paramètres micro-géométriques
du silicium poreux, c'est-à-dire des pores cylindriques de diamètre 20 nm.
La vitesse de l’onde lente au sein de la couche poreuse calculée par le modèle de Biot
est faible aux gammes de fréquences considérées, ce qui permet de considérer le silicium
poreux comme un milieu homogène dans lequel se propage une seule onde longitudinale
correspondant à l’onde rapide du modèle de Biot.
Les plaquettes de silicium poreux étant des structures bicouches composés d'une
couche de silicium cristallin et d'une couche de silicium poreux, la propagation des ondes

Chapitre 2 : Acoustique des Milieux Poreux
74
ultrasonores dans un matériau bicouche a été décrite. En particulier un formalisme
unidimensionnel basé sur les matrices de transfert a été utilisé.
Dans la partie suivante, les méthodes de mesures qui sont utilisées afin de permettre
une caractérisation de la couche poreuse sont présentées, puis les résultats sont comparés aux
valeurs obtenues par méthodes destructives.

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
75
Chapitre 3 : Caractérisation
Ultrasonore Du Silicium Poreux

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
76
Une méthode de caractérisation du silicium poreux est développée en ayant comme
contrainte la possibilité d’être adaptée à une cellule de gravure afin de suivre en temps réel les
propriétés que sont la porosité et la profondeur de gravure. La présentation des cellules de
gravure au premier chapitre a montré que seules les méthodes où l’onde arrive par incidence
normale sont applicables pendant la gravure.
Pour ces raisons, une technique d’insertion-substitution en immersion a été choisie. Le
fluide utilisé est l’eau car les propriétés acoustiques de la solution d’acide fluorhydrique en
sont proches.
Dans ce chapitre, le principe de la mesure ultrasonore est exposé puis les traitements
des signaux recueillis sont faits de manière temporelle, puis fréquentielle. Dans chacun de ces
traitements, le principe est expliqué, puis le dispositif mis en place pour la mesure est présenté
et enfin les résultats obtenus sont discutés.
1 Méthode d’insertion-substitution
Cette méthode est basée sur la mesure de deux signaux : un tir de référence qui
correspond à la transmission de l’onde au travers du fluide seul et un tir à travers l’échantillon
plongé dans le même fluide, comme présentée à la Figure 38.
La mesure absolue de propriétés des ondes acoustiques telles que l’atténuation ou les
coefficients de réflexion/transmission peut être effectuée sans calibrer les transducteurs ni
corriger les effets de diffraction. En effet, étant donné que les conditions de mesure ne
changent pas entre les deux mesures, les paramètres géométriques propres au dispositif, tels
que la position des transducteurs, sont constants. De plus, le fluide est au contact des
transducteurs, et donc la charge acoustique est strictement identique. Les fonctions de
transfert des transducteurs peuvent ainsi être considérées comme constantes entre la mesure

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
77
de référence et la mesure avec l’échantillon. Les différences d’amplitude entre les deux
mesures sont alors uniquement dues à la propagation à travers l’échantillon et aux
phénomènes de réflexion et de transmission.
Figure 38 : Schéma de principe de la méthode d'insertion-substitution. Le signal ref(t) est mésuré sans echantillon et
le signal s(t) est mesuré avec l’échantillon.
Le signal A1B3 est mesuré au niveau du récepteur avant insertion de la plaquette de
silicium dans la cuve. Sa formulation est présentée à l’équation suivante :
A1B3 = ℎ1B, 3,1i3ê1, 3, (67)
où ℎ1B, 3 est la fonction de transfert de l’ensemble des deux transducteurs, la
fréquence d’excitation, ê1, 3 la fonction de diffraction du faisceau acoustique, la
distance entre les deux transducteurs et 13 le coefficient d’atténuation de l’onde
ultrasonore dans l’eau.
La deuxième mesure est effectuée à travers l’échantillon. Le signal transmis en
considérant l’absence de dispersion, peut être écrit de la manière suivante :
1B3 = Ô)A1B − t)3 +ÕÔ$A1B − t$3¦$ì( , (68)
où Ô$ et t$ correspondent respectivement à l’amplitude et au retard du ième écho par
rapport au signal de référence A1B3. Les paramètres Ô) et t) correspondent à l’onde de tête

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
78
et sont couramment utilisés pour déterminer les paramètres acoustiques ou géométriques des
échantillons.
En faisant la transformée rapide de Fourier (FFT), les spectres fréquentiels r213 et U13 sont obtenus. r213 correspond alors à la réponse impulsionnelle du système. U13 est
le spectre du signal ayant traversé l’échantillon. Il correspond à r213 qui est pondéré par la
réponse en transmission <13 de l’échantillon (cf. Equation 69). <13 est appelé spectre de
transmission de l’échantillon.
U13 = <13 ∙ r213. (69)
Le spectre de transmission de l’échantillon dépend des paramètres acoustiques et
géométriques de l’échantillon. Il peut être déduit en effectuant la division du spectre U13 par
le signal de référence r213: <13 = U13r213. (70)
2 Traitement temporel du signal
Dans cette partie, l’objectif est d’effectuer un traitement temporel des signaux. Ce
traitement est en effet rapide et simple, il est donc bien adapté à un suivi de gravure ou de
dépôt. Il est toutefois nécessaire d’évaluer la pertinence de cette approche. Les propriétés qu’il
est intéressant de connaître pour le silicium poreux sont non seulement la profondeur de
gravure mais aussi le taux de porosité de la couche poreuse. Cela nécessite d’être capable de
mesurer le temps d’arrivée ainsi que l’amplitude de l’ensemble des signaux correspondant aux
réflexions de l’onde acoustique à l’interface des couches de silicium cristallin et poreux. Dans
le cadre de cette étude, les fréquences maximales des transducteurs ultrasonores à notre
disposition sont de l’ordre de 20MHz. L’épaisseur de la couche de Si poreux étant faible
devant la longueur d’onde, un recouvrement partiel des signaux est observé.
Dans un premier temps, le principe de la technique choisie pour la détermination des
paramètres acoustiques et géométriques de l’échantillon est expliqué. Ensuite la pertinence de
cette approche est discutée à partir des résultats obtenus.
2.1 Principe de base
Afin d’estimer simultanément les paramètres du silicium poreux tels que la porosité et
l’épaisseur de la couche poreuse, nous choisissons de mesurer la vitesse de propagation des

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
ondes ultrasonores à travers l’échantillon
acoustique de la partie poreuse en utilisant le
précédemment. Cette configuration est applicable à la caractérisation
de gravure.
L’échantillon est immergé dans une cuve d’eau
arrive selon l’axe normal à la surface de la plaquette
ondes longitudinales se propagent théoriquement dans le matériau.
Dans le chapitre précédent il a été montré qu’il y avait
d’une onde rapide dans le silicium poreux selon le modèle de Biot. Toutefois, seule l’onde
rapide est prise en compte, l’onde lente se propageant
pour être mesurée.
Les propriétés des couches de silicium cristallin et poreux sont déduites des
correspondant aux trajets au sein des différents milieux. Il s’agit dans ce cas d’estimer la
vitesse de propagation de l’onde rapide dans le poreux fge$, la densité du silicium poreux
effectuée.
La Figure 39 présente une simulation d’une propagation d’ultrasons à travers un
échantillon de silicium poreux. Elle a pour but d’illustrer comment peut être effectuée la
mesure des paramètres acoustiques
Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
79
ondes ultrasonores à travers l’échantillon bicouche Si-Si poreux ainsi que l’
euse en utilisant le dispositif d’insertion substitution présenté
configuration est applicable à la caractérisation in situ
L’échantillon est immergé dans une cuve d’eau et le faisceau de l’onde ultrasonore
axe normal à la surface de la plaquette de silicium. En conséquence, seules les
ondes longitudinales se propagent théoriquement dans le matériau.
Dans le chapitre précédent il a été montré qu’il y avait coexistence d’une onde lente et
d’une onde rapide dans le silicium poreux selon le modèle de Biot. Toutefois, seule l’onde
pte, l’onde lente se propageant trop lentement et étant trop atténuée
ouches de silicium cristallin et poreux sont déduites des
correspondant aux trajets au sein des différents milieux. Il s’agit dans ce cas d’estimer la
de l’onde rapide dans le poreux Nfge$, l’épaisseur de la couche poreu
, la densité du silicium poreux dfge$. Une estimation de l’atténuation présente une simulation d’une propagation d’ultrasons à travers un
échantillon de silicium poreux. Elle a pour but d’illustrer comment peut être effectuée la
mesure des paramètres acoustiques précédemment cités à partir d’une méthode temporelle.
Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
ainsi que l’impédance
dispositif d’insertion substitution présenté
in situ dans une cellule
et le faisceau de l’onde ultrasonore
de silicium. En conséquence, seules les
coexistence d’une onde lente et
d’une onde rapide dans le silicium poreux selon le modèle de Biot. Toutefois, seule l’onde
et étant trop atténuée
ouches de silicium cristallin et poreux sont déduites des signaux
correspondant aux trajets au sein des différents milieux. Il s’agit dans ce cas d’estimer la
, l’épaisseur de la couche poreuse fge$ est également
présente une simulation d’une propagation d’ultrasons à travers un
échantillon de silicium poreux. Elle a pour but d’illustrer comment peut être effectuée la
précédemment cités à partir d’une méthode temporelle.

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
80
Figure 39 : Modélisation et simulation avec des transducteurs à 50MHz du signal temporel de la référence (en vert) et
du signal traversant l'échantillon dans le cas d'une plaquette de silicium gravée (en bleu), dont la couche poreuse est
d’épaisseur 300µm et avec une porosité de 60%.
Pour cette simulation, le matériau possède une épaisseur de 700 µm dont 300 µm de
couche poreuse. L’onde acoustique incidente a une fréquence centrale de 50 MHz et une
bande passante relative à -6 dB de 100%.
La vitesse au sein du silicium poreux est comprise entre la vitesse dans l’eau (j = 1) et
celle dans le silicium (j = 0). La porosité dans le silicium poreux a été définie à 60% dans la
simulation, ce qui correspond à une vitesse de propagation de l’onde longitudinale rapide
d’environ 3600 m.s-1 selon le modèle de Biot, avec des pores ayant un diamètre de 20 nm (cf.
Figure 37). La densité est alors de 1530 kg.m-3. Aucune atténuation n’a été considérée dans
cette simulation.
Tableau 8 : Caractéristiques acoustiques de l'eau, du silicium cristallin (100) et du silicium poreux à 20°C.
eau Silicium cristallin (100) Silicium poreux
Vitesse de l’onde
longitudinale (m/s) 1480 8430
3600
Densité (kg/m3) 1000 2330 1530
Le signal vert correspond au tir de référence dans l’eau. Le signal E1 correspond à une
propagation de l’onde au travers des couches cristalline (Si) et poreuse (Posi). Le signal E2 a
vu un aller-retour supplémentaire dans la couche cristalline qui est dû à la réflexion à
l’interface silicium cristallin / eau. Le signal E3 quant à lui a effectué l’aller-retour
supplémentaire dans la couche poreuse à cause de la réflexion à l’interface SiPo / Si.
Etant donné que l’impédance acoustique du silicium poreux est intermédiaire entre
celle de l’eau et celle du silicium cristallin, l’onde transmise après réflexion dans la partie
cristalline est en opposition de phase avec celle ayant effectué un aller-retour dans le silicium
poreux. Ceci explique l’opposition de phase entre les signaux E1 et E3 de la Figure 39.
Les temps d’arrivée et amplitude des signaux sont mesurés. Les amplitudes dépendent
des coefficients de réflexion et de transmission de l’onde au niveau des interfaces. Rappelons
que l’atténuation n’est pas prise en compte et que les effets de diffraction sont en grande
partie corrigés grâce à la méthode d’insertion / substitution. Ces coefficients sont dépendants
des impédances acoustiques des différents matériaux :

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
81
<(,! = 2¬!¬(¬! (71)
r(,! = ¬( − ¬!¬(¬! (72)
où <(,! et r(,! sont respectivement les coefficients de transmission et réflexion de
l’onde ultrasonore venant du milieu 1, à l’interface entre les milieux 1 et 2. Dans le cas de la
simulation, les signaux sont séparés d’un point de vue temporel et une estimation de
l’impédance acoustique du silicium poreux est possible en mesurant les amplitudes de deux
signaux successifs øe$,v et øe$,v#( dans le silicium cristallin.
øe$,v#( = øe$,v ∗ re$, ∗ re$,fge$ ∗ ,!ç∗ç (73)
L’impédance acoustique de la partie poreuse peut donc être déduite en considérant que
l’atténuation fge$ est négligeable :
¬fge$ = ¬l$1¬l$ − ¬3øl$,v#(øl$,v ¬l$! ¬ + ¬l$ − ¬
(74)
Le premier temps de vol, correspondant au signal E1, permet le calcul de la vitesse
effective au sein du matériau bicouche. Cette vitesse peut être déduite du décalage temporel ΔB entre la référence (en vert sur la Figure 39) et le signal E1 (cf Equation 75 et 76).
∆B = Bl − Bi (75)
Nii = N ∙ Bℎkgk∆B ∙ N + Bℎkgk (76)
La vitesse effective peut être écrite de façon à faire apparaitre les vitesses de
propagation des ondes ultrasonores dans le silicium (Ne$ ) et dans le silicium poreux (Nfge$). En effet, le temps de propagation Bii dans le matériau bicouche est la somme du temps de
propagation dans le silicium (Be$) et dans le silicium poreux (Bfge$). Bii = Be$ + Bfge$ (77)
Nii = e$Ne$ + fge$Nfge$ (78)
Nii = Nl$Nfge$fge$Ne$ + l$Nfge$ (79)
où est l’épaisseur totale de la plaquette, inchangée pendant la gravure, et e$ l’épaisseur de silicium cristallin non gravé.

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
82
Afin de déterminer les vitesses de propagation dans la couche de silicium poreux, le
temps de vol d’un second signal doit être mesuré. Il peut correspondre à un aller retour dans le
silicium cristallin (B() ou dans le silicium poreux (B!), correspondant respectivement aux
signaux E2 et E3 de la Figure 39.
Dans le cas où l’onde ultrasonore a effectué un aller retour dans le silicium cristallin,
l’épaisseur de silicium poreux peut être déduite en utilisant les équations suivantes :
ΔB = B( − Bl (80)
fge$ =kgk − ΔBNl$2 (81)
La vitesse de propagation de l’onde ultrasonore dans le silicium peut alors être
déterminée à partir de la vitesse effective en utilisant l’équation suivante :
Nfge$ = fge$Nl$Niikgk1Nl$ − Nii3 + fge$Nii (82)
Ces mêmes propriétés peuvent être déterminées en utilisant le signal E3 correspondant
à un aller-retour supplémentaire dans la partie poreuse. Dans ce cas :
ΔB′ = B! − Bl (83)
fge$ =2ΔBNii − Nl$| − NiiNl$2ΔBNii (84)
Nfge$ = 2fge$ΔB (85)
L’estimation de l’atténuation est plus complexe. En effet, l’amplitude des signaux
dépend des différences d’impédance acoustique respectivement ¬, ¬l$ et ¬fge$ de l’eau,
du silicium cristallin et du silicium poreux ainsi que de l’atténuation. Une mesure des
amplitudes des signaux ou de leur enveloppe peut induire une erreur si l’on considère que la
répartition fréquentielle de l’énergie de l’onde évolue entre le tir de référence et celui à travers
l’échantillon, ce qui est le cas lorsque une atténuation est considérée. Cependant la couche de
silicium poreux étant très fine, l’hypothèse d’invariance du signal est faite. Ainsi en prenant
les amplitudes de l’onde de tête øl, de la référence øi et en négligeant les pertes dans le
silicium cristallin, une estimation de l’atténuation au sein de la couche poreuse peut être
effectuée :

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
83
fge$~ − ln1 øløi ∙ <,fge$ ∙ <fge$,e$ ∙ <e$,3fge$ , (86)
2.2 Recouvrement partiel des signaux
La simulation précédente a été effectuée en considérant une fréquence du signal autour
de 50Mhz. Des transducteurs de fréquence centrale 20MHz sont utilisés dans cette thèse et un
recouvrement partiel des signaux est observé, comme le montre la Figure 40 où une
simulation est effectuée avec ces transducteurs à 20 MHz ayant une bande passante de 100% à
-6dB. Dans ce cas les mesures de temps de vol et d’amplitude ne sont possibles que pour
l’onde de tête à moins d’isoler les différents signaux avec un traitement de signal adapté
comme la déconvolution.
Figure 40 : Simulation avec des transducteurs à 20MHz du signal temporel de la référence (en vert) et du signal
traversant l'échantillon dans le cas d'une plaquette de silicium gravée (en bleu), dont la couche poreuse est épaisse de
300µm et avec une porosité de 60%.
Ainsi le couple de valeurs (fge$, Nfge$) ne peut plus être déterminé car le temps de
vol du deuxième signal ne peut être mesuré. Il est alors nécessaire de connaitre à priori l’un
des paramètres, fge$ ou Nfge$, afin de pouvoir estimer le second.
Dans le cadre de gravures électrochimiques, une mesure destructive initiale permettrait
d’étalonner le dispositif et de connaître par exemple le taux de porosité et par voie de
conséquence la vitesse de propagation des ondes ultrasonores dans la partie poreuse. Ceci
permettrait de connaître la profondeur de gravure pour des silicium mésoporeux semblables.
Le suivi de l’amplitude du signal peut également permettre de suivre l’évolution de la
profondeur de gravure en connaissant l’atténuation dans la partie poreuse.

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
84
2.3 Détermination des propriétés acoustiques de la couche poreuse
2.3.1 Dispositif expérimental
Le dispositif est présenté à la Figure 41. Deux transducteurs plans de fréquence
centrale de 20MHz sont utilisés (modèle ISL2002VHR de la marque Technisonic). Une
impulsion, composée d’une arche d’un cycle de sinus à la fréquence centrale des
transducteurs d’une amplitude de 10 Vpp, est délivrée par un générateur de fonction Agilent
33250A. Après propagation de l’onde, le signal électrique au niveau du récepteur est numérisé
grâce à un oscilloscope Lecroy Waverunner 64XI digital, à une fréquence d’échantillonnage
de 5GHz. Afin d’augmenter le rapport signal sur bruit, le signal est moyenné sur 1024
enregistrements.
Figure 41 : Dispositif expérimental utilisé pour les mesures effectuées en insertion-substitution.
Les échantillons de silicium poreux utilisés pour cette mesure sont les échantillons 1 à
4 qui ont été présentés au chapitre 1 et dont les paramètres épaisseur et porosité sont rappelés
au Tableau 9.
Tableau 9: Paramètres épaisseur et porosité des échantillons 1 à 4.
Numéro d’échantillon 1 2 3 4
Épaisseur (µm) 0 101 199 285
Porosité (%) / 35-40 35-40 35-40

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
85
2.3.2 Estimation de la vitesse
Figure 42 : Signal temporel enregistré dans le cas de l'échantillon 3.
La Figure 42 présente le signal temporel de l’onde ultrasonore s’étant propagée au
travers de l’échantillon 3 ainsi que sa transformée de Hilbert. Comme prédit par la simulation,
les signaux passant par l’échantillon présentent des recouvrements partiels et une
détermination complète des paramètres de la couche poreuse est donc limitée.
La transformée de Hilbert est effectuée sur les signaux afin de faire une estimation
plus précise des différents temps de vol. Les temps d’arrivée sont mesurés à une valeur seuil,
représentant un pourcentage de leur amplitude maximale. Cette valeur de seuil est fixée à 10%
de l’amplitude du signal afin d’être au dessus du niveau de bruit et de minimiser les effets de
la dispersion sur la mesure.
Figure 43 : Transformées de Hilbert normalisées du signal de référence et du signal après traversée de l'échantillon 3.
Les mesures des temps sont effectuées à une valeur seuil de 10%.
La Figure 43 présente les transformées de Hilbert normalisées des signaux de
référence et au travers de l’échantillon par leur maximums respectifs, dans le cas de

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
86
l’échantillon 3. Un important recouvrement est observé, du aux nombreux aller-retours de
l’onde au sein des couches de silicium cristallin et de silicium poreux. Malgré ce
recouvrement, la décroissance de l’amplitude est clairement visible due à l’atténuation et aux
transmissions d’énergie aux multiples interfaces (eau/Si/SiPo)
Grâce aux mesures du temps de vol de référence (Bi) et du temps de vol de l’onde de
tête au travers de l’échantillon (Bl), les retards de l’onde de tête sur la référence (ΔB) peuvent
être calculés. Les vitesses effectives Nii sont calculées en utilisant l’équation 76 et reportées
au Tableau 10. Une diminution importante de la vitesse effective est observée malgré une
faible variation du retard, à cause de la faible épaisseur de la plaquette et de la différence
importante entre la vitesse de propagation des ondes ultrasonores dans l’eau et dans le
silicium cristallin. Ceci nécessite d’effectuer une mesure précise de ce retard. L’erreur sur la
vitesse effective est estimée en tenant compte de la variation de température et des erreurs de
mesure des épaisseurs et du retard ΔB. Tableau 10 : Valeurs des retards mesurés et les vitesses effectives correspondantes.
Epaisseur de la couche
poreuse Retard ΔB Vitesse effective Nii
0 µm 376±0.5 ns 8430±100 m/s
101 µm 372±0.5 ns 7740±100 m/s
199 µm 363±0.5 ns 6960±100 m/s
285 µm 349±0.5 ns 6300±100 m/s
Figure 44 : Evolution de la vitesse effective mesurée avec la profondeur de gravure pour un taux de porosité entre
35% et 40%. est fixée à 4975 m/s, en fonction de l’épaisseur de la couche poreuse.

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
87
La Figure 44 présente l’évolution de la vitesse effective en fonction de l’épaisseur de
la couche poreuse, mesurée sur les 4 échantillons. Une décroissance de la vitesse effective est
observée, la vitesse de propagation des ondes longitudinales dans la couche poreuse étant bien
inférieure à celle dans le silicium cristallin.
La valeur mesurée pour l’échantillon de silicium cristallin est de 8430 m/s, ce qui
correspond à la vitesse de propagation des ondes longitudinales dans une plaquette de silicium
d’orientation (100).
L’équation de la vitesse effective peut être reformulée afin de dépendre du couple de
variables (fge$, Nfge$) (cf Equation 79). Ainsi en ajustant la variable Nfge$ sur les valeurs
expérimentales de vitesses effectives, elle peut être estimée à une valeur de 4975 m/s. Cela
correspond à une porosité aux environs de 40% en utilisant le modèle de Biot appliqué au
silicium poreux, présenté au chapitre précédent. Cette valeur est cohérente avec les conditions
de gravure des échantillons, qui correspondent à une porosité entre 35 et 40%.
Grâce à cette estimation de la porosité, la valeur de la densité dfge$ peut être
déterminée à 1800 kg.m-3 (cf Equation 87). De même, la valeur de l’impédance acoustique de
la couche poreuse ¬fge$ est ainsi approximée à 9 Mrayls.
dfge$ = j ∗ d + 11 − j3 ∗ de$ (87)
2.3.3 Estimation de l’atténuation La faible épaisseur des couches de silicium poreux peut causer l’apparition d’ondes
stationnaires au niveau des interfaces. Afin de tenir compte de ces phénomènes, les ondes
ascendantes et descendantes doivent être prises en compte au sein du matériau poreux. Ce
faisant, l’impédance acoustique de la couche de silicium cristallin peut être ramenée au niveau
de l’interface eau-silicium poreux, alors nommée ¬fge$|e$ , grâce à la théorie des lignes de
transmission [128] (cf Equation 88).
¬fge$|e$ = ¬fge$ ¬e$ + ±¬fge$Bb1;fge$fge$3¬fge$ + ±¬e$Bb1;fge$fge$3 , ;fge$ = 2ÓNfge$ (88)
Les valeurs des amplitudes des ondes de tête sont alors corrigées en tenant compte des
coefficients de transmission et comparées à la valeur d’amplitude de l’onde de référence.

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
88
Figure 45 : Evolution des amplitudes en fonction de l'épaisseur de couche poreuse sans prise en compte de la faible
épaisseur de la couche poreuse (vert) et en utilisant la théorie des lignes de transmission (bleu).
La Figure 45 présente les valeurs de l’amplitude selon que la théorie des lignes de
transmission est prise en compte ou non. Après correction, l’amplitude décroit de manière
monotone. Il apparaît nécessaire de prendre en compte les ondes stationnaires dans la
détermination des atténuations à partir de mesures d’amplitudes
Une décroissance importante de l’amplitude est observée, malgré la faible épaisseur
des couches poreuses. Cela implique une valeur élevée du coefficient d’atténuation fge$ . Afin d’estimer sa valeur, l’amplitude est ramenée en dB. Ainsi selon l’Equation 86, le
coefficient d’atténuation correspond à la valeur absolue de la pente (cf Figure 46).
Figure 46 : Evolution de l'amplitude corrigée (en dB) en fonction de l'épaisseur de la couche poreuse. La pente de
l'interpolation linéaire correspond au coefficient d'atténuation (en dB).
Il peut être observé que l’interpolation linéaire est très proche des valeurs
expérimentales, bien que la dispersion n’est pas été prise en compte pour la mesure de

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
89
l’amplitude. L’estimation du coefficient d’atténuation fge$ est alors de 540 dB/cm, soit
6200 Np/m. Connaissant cette valeur d’atténuation et en considérant que l’atténuation est
négligeable dans le silicium cristallin, une mesure d’amplitude de l’onde de tête pourra
donner une bonne estimation de la profondeur de gravure pour une porosité donnée.
2.4 Déconvolution
Afin de permettre une mesure des temps de vol t1 ou t2 malgré le recouvrement partiel
des signaux et ainsi être en mesure d’estimer la profondeur de gravure et le taux de porosité
simultanément, une déconvolution entre le signal correspondant à l’onde traversant
l’échantillon et la référence est proposée. Dans une première partie, le principe de la méthode
est décrit, puis les résultats obtenus par la déconvolution sont discutés.
2.4.1 Principe
Le signal temporel (1B3) ayant traversé l’échantillon et subi de multiples réflexions
peut s’exprimer en fonction du signal de référence (A1B3), en considérant ce signal invariant
(cf Equation 89). Cette considération implique que la dispersion est négligée. Au vu de la
taille des pores par rapport aux longueurs d’onde mises en jeu, cette approximation semble
raisonnable. L’invariance implique aussi une atténuation modérée, ce qui est contraire à la
mesure. Cependant les effets de l’atténuation sont faibles étant donné la distance parcourue
par l’onde ultrasonore dans le milieu poreux. Ces approximations seront par la suite discutées.
1B3 = ÕÔ$A1B − t$3¦$ì) (89)
Le signal peut alors s’écrire comme la convolution du signal de référence A1B3 par
un train d’impulsion Ö1B3. Ce signal correspond alors aux retards t$ des signaux par rapport à
la référence ainsi que leurs amplitudes Ô$ (cf Equation 90). Ce signal contient ainsi toutes les
informations nécessaires pour l’estimation de l’épaisseur fge$, de la vitesse *fge$ permettant
de déduire l’ensemble des propriétés de la couche poreuse en une seule mesure.
1B3 = A1B3 ∗ Ö1B3 Ö1B3 = ÕÔ$¦
$ì) ©1t$3 (90)
La déconvolution a pour but de retrouver le signal x(t) en connaissant les signaux s(t)
et ref(t), voire même seulement le signal s(t), dans le cas de la « blind deconvolution » [129].

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
90
Afin de simplifier les calculs, une transformée de Fourier peut être effectuée. De cette
manière, l’opération de convolution devient une opération de multiplication (cf Equation 91).
U13 = r213 ∙ £13 (91)
Une simple division permet alors de déduire le signal £13 . Cependant cette
opération, appelée déconvolution brute, amplifie le bruit en haute fréquence. Le signal x(t) est
alors très bruité et impossible à interpréter. Afin de limiter cette influence du bruit en hautes
fréquences, des méthodes tenant compte de ce bruit peuvent être mises en œuvre mais elles
nécessitent une connaissance du bruit, comme par exemple la méthode de déconvolution de
Wiener [130]. Etant donné la complexité de quantifier le bruit, la méthode de déconvolution
choisie est basée sur la minimalisation au sens des moindres carrés du signal temporel. Ces
méthodes sont plus longues mais permettent une résolution plus robuste et moins dépendante
du niveau de bruit du signal.
Afin de permettre un traitement numérique, une mise sous forme matricielle des
signaux est nécessaire (cf Equation 92). La discrétisation du signal permettant cette écriture
matricielle est effectuée lors de son enregistrement.
= Ö ↔ = Õ~$ . Ö~ (92)
où est la matrice de transfert entre Ö et . La déconvolution consiste alors à
minimiser au sens des moindres carrés la distance entre le signal estimé Ö et le signal
mesuré s.
+V1‖Ö − ‖!3 (93)
Cependant la minimalisation de ce système donne rarement le signal Ö attendu. En
effet, le système peut être mal conditionné (et donc très sensible au bruit) ou la solution
obtenue peut ne pas correspondre à la réalité du système (non-unicité de la solution). Afin de
permettre une meilleure approximation du signal x(t), une hypothèse que les signaux 1B3 et A1B3 sont positifs peut être prise, en travaillant sur les enveloppes obtenues grâce à la
transformée de Hilbert.
En prenant en compte cette hypothèse, Gold a développé un algorithme inspiré de
celui de Van-Cittert [131], [132]. Cette méthode itérative a pour but de chercher le vecteur Ö tel que soit égal à Ö, en utilisant un facteur correctif , dit de relaxation.

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
91
Öv#( = Öv + 18 − øÖv3 ø = 8
(94)
En faisant un choix judicieux du facteur correctif, Gold assure la positivité de la
solution x si les matrices H et sont elles aussi positives. En incorporant ce facteur dans
l’algorithme, la relation devient celle de l’Equation 95.
Ö$v#( = 8∑ ø$ÆÖÆvÆ Ö$v (95)
L’avantage de cette méthode par rapport à la plupart des méthodes de déconvolution est
qu’il n’est pas nécessaire d’inverser de matrices, ce qui peut être très pénalisant tant en espace
mémoire qu’en temps de calcul.
2.4.2 Résultats
L’algorithme de Gold a été utilisé sur les mêmes signaux temporels que précedemment
afin de déterminer les temps de vols dans chaque couche. Cependant la longueur des signaux
temporels est importante (105 points), ce qui implique des matrices A et H de très grandes
tailles (de l’ordre de 1010 valeurs). L’espace mémoire nécessaire pour stocker ces matrices
dépasse largement la capacité mémoire de Matlab, limitée à 2Go.
Afin de diminuer le nombre de points, la partie du signal contenant peu d’information
est enlevée. Ainsi le début du signal et la fin du signal, où l’amplitude est inférieure à un
millième du maximum, sont tronqués. La longueur du signal est ainsi réduite aux environs de
4*104 points, variable selon les échantillons. L’espace mémoire est donc encore trop
important et il est alors nécessaire de diminuer l’échantillonnage afin de construire les
matrices A et H. Ainsi seulement un point sur cinq est conservé, ce qui diminue la précision
temporelle, passant de 0.2 ns à 1 ns. De plus, afin de limiter l’espace mémoire nécessaire, les
matrices sont implémentées en tant qu’éparpillées dans Matlab, c'est-à-dire que les éléments
nuls ne sont pas considérés.
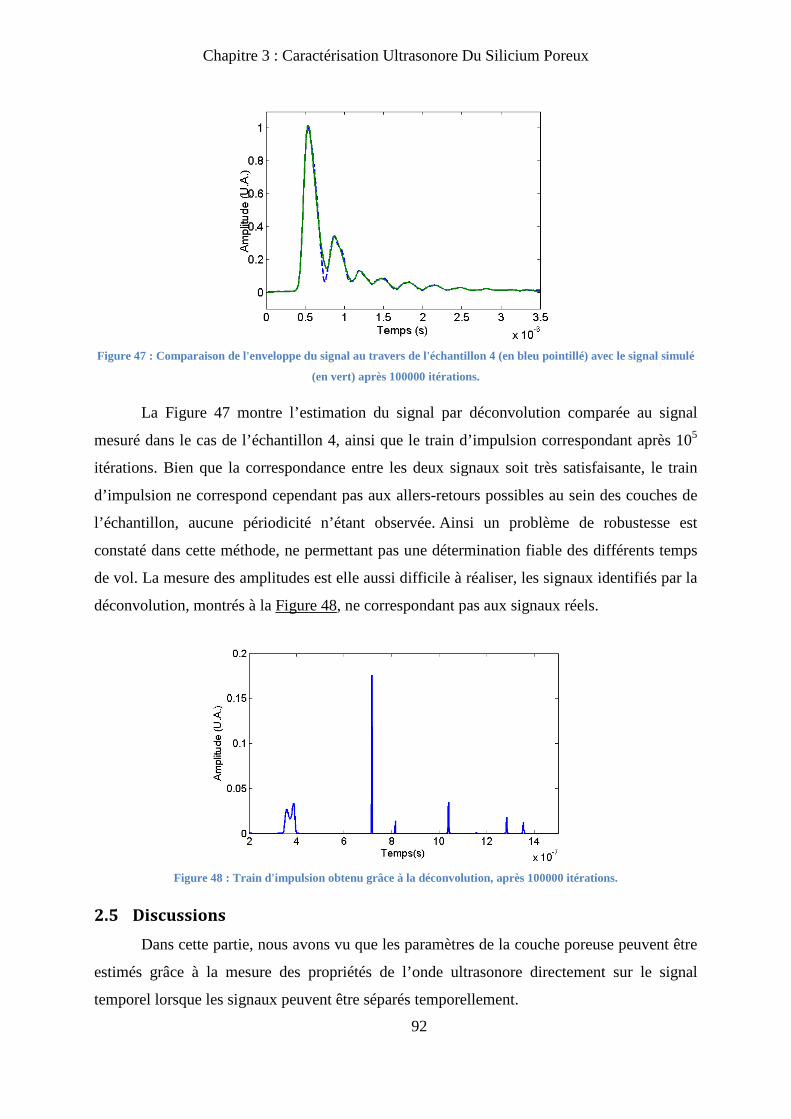
Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
92
Figure 47 : Comparaison de l'enveloppe du signal au travers de l'échantillon 4 (en bleu pointillé) avec le signal simulé
(en vert) après 100000 itérations.
La Figure 47 montre l’estimation du signal par déconvolution comparée au signal
mesuré dans le cas de l’échantillon 4, ainsi que le train d’impulsion correspondant après 105
itérations. Bien que la correspondance entre les deux signaux soit très satisfaisante, le train
d’impulsion ne correspond cependant pas aux allers-retours possibles au sein des couches de
l’échantillon, aucune périodicité n’étant observée. Ainsi un problème de robustesse est
constaté dans cette méthode, ne permettant pas une détermination fiable des différents temps
de vol. La mesure des amplitudes est elle aussi difficile à réaliser, les signaux identifiés par la
déconvolution, montrés à la Figure 48, ne correspondant pas aux signaux réels.
Figure 48 : Train d'impulsion obtenu grâce à la déconvolution, après 100000 itérations.
2.5 Discussions
Dans cette partie, nous avons vu que les paramètres de la couche poreuse peuvent être
estimés grâce à la mesure des propriétés de l’onde ultrasonore directement sur le signal
temporel lorsque les signaux peuvent être séparés temporellement.

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
93
Cependant la fréquence utilisée pour les mesures dans le cadre de ce travail ne permet
pas cette séparation des signaux, ce qui limite la détermination de la vitesse de l’onde
longitudinale et de l’impédance acoustique de manière simultanée. Lorsque l’un des
paramètres est fixé, la mesure du retard et de l’amplitude de l’onde de tète est suffisante pour
permettre l’estimation du deuxième paramètre du couple (fge$, Nfge$). Cela est intéressant
pour le suivi de gravure, où une mesure étalon permet l’estimation de la vitesse de l’onde
longitudinale dans la couche poreuse. Ainsi l’épaisseur de gravure peut alors être estimée
grâce au retard de l’onde de tête sur l’onde de référence.
L’estimation de l’atténuation sur le signal temporel au sein de la couche poreuse prend
comme hypothèse que la forme du signal est invariante et que l’atténuation dans l’eau et le
silicium sont négligeables. Les fortes valeurs d’atténuation estimées montrent que l’hypothèse
de valeurs négligeables d’atténuation dans le silicium et l’eau sont vérifiées. Les faibles
épaisseurs de la couche poreuse comparées à la longueur d’onde permettent de considérer que
le signal ne subit pas de distorsion importante, du moins pour l’onde de tête. Ainsi la valeur
estimée du coefficient d’atténuation permet, pour des conditions de gravure similaires,
d’estimer la profondeur de la couche poreuse. Cependant la précision de mesure est limitée
étant donné que les effets de l’atténuation sur l’amplitude et la forme de l’onde sont faibles.
Lorsque la connaissance a priori d’un des paramètres n’est pas possible ou que
l’étalonnage n’est pas souhaité, une déconvolution peut permettre d’estimer les différents
temps de vol et les amplitudes, même dans le cas de recouvrement partiel.
En utilisant l’algorithme de Gold pour la déconvolution du signal, une hypothèse de
positivité des signaux est prise. Grâce au calcul des enveloppes en utilisant la transformée de
Hilbert, cette hypothèse peut être utilisée.
Bien que le signal soit correctement estimé grâce à la déconvolution, le train
d’impulsion estimé ne correspond pas aux différents allers-retours possibles au sein du
matériau bicouche. Ainsi la déconvolution ne permet pas une mesure simultanée du couple
(fge$, Nfge$) car la mesure des temps de vol n’est pas fiable.
3 Traitement fréquentiel du signal : présentation et validation
Afin de pouvoir étudier toutes les propriétés de la couche poreuse en une seule mesure
malgré la problématique du recouvrement partiel des signaux, un traitement fréquentiel des

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
94
signaux est proposé. Ce traitement étant plus complexe, une résolution du problème par
méthode inverse est effectuée afin de déterminer les paramètres de la couche poreuse
(épaisseur et porosité).
Ainsi dans cette partie, le modèle de propagation de l’onde ultrasonore au sein du
matériau multicouche est présenté. Puis la méthode d’optimisation est explicitée et validée sur
un matériau référence.
3.1 Modèle de propagation des ondes au sein de la plaquette de silicium
La plaquette de silicium gravé est modélisée comme étant un matériau bicouche,
composé de silicium cristallin et de silicium poreux. Il est immergé dans un fluide, de l’eau
dans ce travail (cf Figure 49). Les milieux fluides sont considérés comme semi infinis, ce qui
revient à dire qu’aucune réflexion n’a lieu aux interfaces transducteur/eau. Les interfaces
entre les différents milieux sont considérées comme normales à la direction de propagation
des ondes ultrasonores et parfaitement planes. Ainsi les ondes de cisaillement sont
considérées comme ayant une amplitude nulle.
Cette configuration peut encore facilement se transposer à une cuve de gravure
électrochimique afin de permettre un suivi de la gravure du silicium. En effet, les seules
couches à ajouter sont les électrodes de platine, dont la structure provoque une légère
divergence du faisceau. L’influence de ces couches est corrigée durant la gravure grâce à la
mesure de référence, effectuée dans la méthode d’insertion-substitution.
Figure 49 : Modélisation d'une onde au travers d'un matériau bicouche.
Ainsi, en excitant le matériau avec une onde monochromatique incidente d’amplitude ø$ , une onde réfléchie d’amplitude ø est observée à gauche de l’échantillon et une onde
transmise d’amplitude øk est observée à droite.
La taille des pores de la couche poreuse est très petite devant la longueur d’onde, ce
qui permet de considérer le matériau comme étant peu dispersif. Ceci est confirmé par les

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
95
mesures effectuées pour le traitement temporel, où le signal est peu ou pas déformé après son
passage dans l’échantillon. De plus, au chapitre 2 il a été montré que la vitesse de l’onde lente
est très faible. On peut alors considérer que le matériau est traversé par une seule onde
longitudinale, qui correspond à l’onde rapide dont les propriétés sont estimées par le modèle
de Biot.
Afin de modéliser la propagation des ondes ultrasonores au sein du matériau bicouche,
le formalisme présenté au chapitre 2 est utilisé. Les paramètres d’entrée pour chaque iième
couche du modèle, en utilisant le formalisme de Cervenka [127], sont la densité de chaque
milieu 1d$), les nombres d’onde des ondes de compression (;Ü$) et les épaisseurs de chaque
couche ($3. Le nombre d’onde ;Ü au sein de la iième couche à la fréquence peut être calculé à
partir de la vitesse de propagation de l’onde de longitudinale *$ dans cette couche :
;Ü = *$2Ó (96)
Les valeurs des vitesses de propagation des ondes longitudinales ainsi que les densités
de l’eau et du silicium cristallin sont rappelées au Tableau 8. Comme l’onde incidente est
normale aux interfaces et que le matériau est immergé, une simplification des matrices est
possible afin de ne tenir compte que des ondes longitudinales [127]. Ainsi une matrice ý
reliant les amplitudes des ondes avant l’échantillon (ø$ et ø) à celles après (øk) peut être
déterminée :
æøk0 è = ý Ñø$øÒ (97)
Le coefficient de transmission théorique de l’onde monochromatique peut être
calculé :
< =økø$ (98)
Ce modèle permet de déterminer l’amplitude de l’onde transmise pour une onde
monochromatique au travers de la plaquette gravée. Dans le cas d’une onde polychromatique,
le spectre de transmission <kÎg peut être calculé en effectuant le calcul du coefficient de
transmission pour chaque fréquence du spectre de l’onde incidente.

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
96
Le spectre de transmission dépend alors de paramètres géométriques et acoustiques,
tels que l’épaisseur, la vitesse de l’onde rapide et la densité de la couche poreuse.
L’impédance acoustique est un paramètre qui intervient lors des changements de milieu et
affecte l’amplitude du spectre de transmission. L’épaisseur et la vitesse de propagation
causent quant à elles les résonances observées sur le spectre de transmission.
3.2 Mise en place de l’inversion du problème
3.2.1 Principe de l’inversion
Figure 50 : Optimisation d'un système par inversion.
Une inversion du problème est nécessaire si le système est difficile à résoudre, à cause
du nombre de paramètres ou de sa complexité. Le principe itératif de l’inversion est présenté à
la Figure 50. Une simulation avec des paramètres d’entrée ajustables est réalisée puis l’erreur
entre la simulation et l’expérience est calculée. Les paramètres d’entrée du système sont alors
modifiés afin d’obtenir une erreur minimale. Lorsque cette erreur atteint un minimum ou que
la condition de fin est atteinte, les paramètres sont considérés comme optimaux.
Il a été montré que les paramètres qui sont les inconnues du système peuvent être
limités à l’impédance acoustique du silicium, permettant de déterminer sa porosité, et son
épaisseur.
Lorsqu’une optimisation globale est souhaitée, des algorithmes permettant une
recherche aléatoire doivent être utilisés afin de permettre d’être moins dépendant des valeurs
initiales [133]. En effet, les solutions d’un système peuvent présenter plusieurs minima. Cela
est particulièrement important pour les milieux dont les propriétés peuvent beaucoup varier,
ce qui est le cas lors du suivi de la gravure du silicium poreux. De larges variations de vitesse
et de densité sont observées entre le silicium poreux et le silicium cristallin. Des algorithmes

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
97
couramment utilisés présentant ce comportement sont le recuit simulé ou l’algorithme
génétique. Le principal avantage de l’algorithme génétique sur le recuit simulé est qu’une
population de solution est considérée au lieu d’une seule, ce qui limite les cas de
convergences prématurées.
Figure 51 : Exemple de cartographie des solutions dans le cas d'une plaquette de silicium gravée.
Un exemple de système ayant plusieurs minima, représentés par des croix, est donné
sur la Figure 51. Elle présente la valeur de la distance entre les spectres théoriques et le
spectre modélisé en fonction de la profondeur et la porosité de la couche poreuse, pour une
épaisseur de l’échantillon constante. L’échantillon test est une plaquette de silicium de 675
µm ayant une couche poreuse d’une épaisseur de 300 µm et une porosité de 10%.
De nombreux minima peuvent être identifiés sur cette cartographie, et il est alors
difficile de converger vers la bonne solution sans connaitre une valeur approximative des
caractéristiques de la couche poreuse a priori. De plus, les spectres calculés pour les
coordonnées correspondant aux minimas sont proches, ce qui limite l’identification de l’erreur
entre l’expérience et le signal simulé lors du contrôle des résultats.

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
98
Figure 52 : Traitement des données lors de l'inversion du problème.
La Figure 52 explicite le traitement qui a lieu lors de l’inversion du modèle afin de
retrouver les inconnues. L’optimisation permet alors l’ajustement du modèle théorique sur les
valeurs expérimentales afin d’obtenir les paramètres ¬gl$ et j correspondant à la meilleure
solution. Afin de tenir compte de la bande passante des transducteurs, le spectre théorique est
multiplié par le spectre de référence pour former le spectre U’13. Cela permet de filtrer les
fréquences qui sont en dehors de la bande passante.
3.2.2 Algorithme génétique
Cette méthode a été proposée par Holland afin de copier la sélection naturelle et sa
capacité à mettre en place une solution optimale en réponse à la pression sélective [134].
Ainsi cet algorithme a pour but de créer une population et de la laisser évoluer jusqu’à ce que
la solution optimale du problème soit trouvée. Seuls les individus les mieux adaptés d’une
génération sont utilisés pour la génération suivante.
L’avantage de cet algorithme est sa capacité à converger vers les solutions globales du
système, permettant la recherche d’une solution sans connaissance à priori des paramètres.
Cependant il ne permet pas une convergence aussi rapide et aussi précise que des méthodes

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
99
telles que celles du gradient ou du Simplexe. Ces méthodes ne permettent cependant qu’une
recherche vers la meilleure solution locale, d’où le risque de ne pas trouver la meilleure
solution globale.
3.2.2.1 Définition des paramètres
Afin d’imiter le modèle biologique, l’ensemble des paramètres optimisés est appelé
génotype. Chaque variable est représentée par un gène, unité d’information du vivant. Les
gènes sont regroupés en chromosomes et l’ensemble de ces chromosomes est appelé un
individu. Bien que la plupart des organismes vivants présentent deux copies de chaque
chromosome (diploïdie), la plupart des algorithmes génétiques utilisent des individus avec
une seule version de chaque chromosome (haploïdie). Cela permet une implémentation plus
simple de l’algorithme mais diminue la capacité de l’individu à s’adapter. Le résultat d’un
système prenant en entrée un génotype est appelé phénotype.
Figure 53 : Principe de l'optimisation en utilisant un algorithme génétique.
L’algorithme génétique est constitué de cinq étapes principales : la création de la
première population, l’évaluation de la population, la sélection des individus, la reproduction
et le test de la condition de fin. La Figure 53 montre la boucle de fonctionnement du système.
Un cycle est appelé une génération.
La population initiale influence peu le résultat final de l’optimisation dans le cas d’un
algorithme génétique correctement paramétré. Ainsi, la valeur initiale O$v$ de chaque gène est
choisie de façon aléatoire dans son ensemble de définition, encadré par OÆÉ et OÆ$v.
O$v$ = 1OÆÉ − OÆ$v3 ∗ A + OÆ$v, A ∈ 0,1 (99)
L’étape d’évaluation mesure l’adéquation du phénotype par rapport à la mesure
expérimentale, ce qui est effectué grâce à la fonction d’adaptation, qui est dépendante du
système étudie.

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
100
Lors de l’étape de sélection, une population contenant les meilleurs individus de la
génération précédente est créée. Cette sélection est effectuée à partir de l’évaluation des
individus. Elle peut alors se baser sur le rang ou sur la valeur de la fonction d’adaptation. Afin
de permettre la meilleure convergence possible, la méthode de sélection probabiliste
universelle est utilisée [135].
Lors de la reproduction, la population sélectionnée subit deux opérations : le
croisement et la mutation. Le croisement permet un métissage doux des parents afin d’obtenir
un individu proche desdits parents, mais cependant différent. La seconde opération quant à
elle peut provoquer une modification brutale du phénotype. Ce changement peut être délétère
comme dans le cas du nanisme ou de l’albinisme par exemple, ou bénéfique comme pour les
gènes de développement qui ont permis un accroissement de la masse cérébrale chez
l’homme.
Le test de la condition de fin permet d’arrêter la boucle. Cette condition peut prendre
différentes formes selon les caractéristiques de l’algorithme génétique : nombre de
générations, nombre de générations sans variation de la valeur de la fonction d’adaptation ou
une valeur donnée cette fonction.
3.2.2.2 Représentation en nombres réels
La plupart des algorithmes génétiques utilisent la représentation binaire pour
implémenter leurs variables. En effet, cette représentation est proche du modèle biologique et
sa faible cardinalité permet une convergence optimale selon la théorie des schemata [134],
[136].
De son coté, la représentation en nombres réels à virgule flottante permet
l’optimisation des variables dans un espace de définition vaste avec une précision relative
constante. Ainsi cette représentation permet un gain d’espace pour le stockage de
l’information. De plus, les représentations en nombres réels ont un alphabet proche de celui
des systèmes optimisés, ce qui garantit une meilleure convergence de l’algorithme [137].
Enfin il n’est pas nécessaire d’effectuer des conversions entre les valeurs binaires et les
valeurs réelles, ce qui assure un gain de temps.
3.2.2.3 Opérateurs
La mutation est la modification aléatoire d’un gène à la kième génération O; à
l’intérieur des bornes de définition dudit gène afin de former un gène muté O7#( utilisé pour

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
101
la génération suivante. Cette modification est très brutale dans le cas d’une représentation
réelle, la représentation binaire permettant les effets de bits faibles et forts. Cette forte
variation peut alors limiter la convergence. Afin de prendre en compte cette forte variation,
Michalewzky a proposé une loi pour la mutation qui est non monotone, incluant le
vieillissement de la population [138] (cf Equation 100).
O7#( = O7 + Δ1;, OÆÉ − O73V+ > 1/2O7 − Δ1;, O7 − OÆ$v3V+ ≤ 1/2 , + ∈ 0,1 Δ1B, C3 = C ∗ á1 − A(, k8â , A ∈ 0,1 (100)
où b est le paramètre permettant la non monotonie et <Æk le nombre total de
générations. Les nombres + et A sont tirés aléatoirement pour chaque mutation. La variation
de l’espace de recherche au cours du vieillissement de la population est présentée à la Figure
54. Ainsi pour une valeur de A tirée entre 0.5 et 1, l’espace de recherche évolue entre 62% et
9% de l’étendue maximale entre la première génération et lorsque 90% des générations ont
été effectuées. De même, plus la valeur de b est élevée et plus la décroissance est rapide
lorsque le nombre de générations approche <Æk.
Figure 54 : Evolution du domaine de recherche à b constant à 1,4 (a gauche) et à t/Tmut constant à 0,5 (à droite).
Le croisement est obtenu grâce à la moyenne pondérée des deux individus qui ont été
sélectionnés. Ainsi chaque gène des deux individus est utilisé afin de créer deux nouveaux
individus (cf Equation 101). Le coefficient r de pondération est tiré de façon aléatoire pour
chaque croisement.
O(7#( = A ∗ O(7 + 11 − A3 ∗ O!7O!7#( = A ∗ O!7 + 11 − A3 ∗ O(7, A ∈ 0,1 (101)

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
102
3.2.2.4 Fonction d’adaptation
La fonction d’adaptation doit représenter la proximité d’un phénotype par rapport à la
solution optimale. Cette solution est la valeur expérimentale dans le cadre de la résolution
inverse de problème. La distance au sens des moindres carrés entre la courbe théorique et la
courbe expérimentale est un bon indicateur de l’erreur entre ces deux courbes. La fonction
d’adaptation peut ainsi être définie comme étant l’inverse de la distance . Afin d’éviter que cette fonction tende vers l’infini lorsque la distance tend vers zéro,ce
qui pourrait provoquer une pression sélective importante et causer une convergence
prématurée,un introduit un paramètre Ô (cf Equation 102) .
= 1 + Ô (1)
La Figure 55 montre l’évolution de la fonction d’adaptation en fonction de la distance
pour différentes valeurs du paramètre Ô . Ce paramètre est fixé à 1 par la suite afin de
permettre une pression sélective modérée.
Figure 55 : Evolution de la valeur de fitness en fonction de la distance entre les spectres selon la valeur du paramètres .
3.2.3 Relation impédance acoustique-porosité
L’impédance acoustique est un paramètre qui joue un rôle important dans l’amplitude
du spectre de transmission, ce qui rend indispensable son étude dans le cas d’une inversion.
Les paramètres recherchés dans le cadre de la caractérisation du silicium poreux étant la
porosité et l’épaisseur, une relation entre l’impédance acoustique et la porosité doit être
proposée.

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
103
La densité effective peut être déterminée grâce à la fonction qui est donnée à
l’Equation 87. Elle correspond à une relation linéaire entre la porosité et les densités
respectives du silicium et de l’eau.
La relation entre la porosité et la célérité de l’onde rapide dans le silicium poreux peut
être obtenue en utilisant le modèle de Biot. Cependant une formulation plus simple de la
vitesse en fonction de la porosité est souhaitable afin de permettre un calcul plus rapide de sa
valeur, ce qui est essentiel dans le cas de la résolution d’un problème inverse. La relation
donnée à l’Equation 103, basée sur les travaux de Da Fonseca [126], dans laquelle le
paramètre peut être ajusté au système considéré (type de matériau, porosité, fréquence de
travail).
*fge$ = 1*l$ − *3 ∗ 11 − j3 + * (2)
La Figure 56 montre l’évolution de la vitesse de l’onde rapide en fonction de la
porosité, comparée à la relation explicitée ci-dessus. La vitesse de l’onde longitudinale rapide
a été calculée en utilisant le modèle de Biot avec un silicium poreux ayant une porosité
cylindrique et une taille de pores de 10 nm de diamètre. Les valeurs extrêmes de la vitesse
sont obtenues pour une porosité nulle et une porosité de 100%, correspondant alors
respectivement à la vitesse dans le silicium cristallin (*e$) et dans l’eau (*). Le paramètre p
est ajusté pour obtenir une bonne correspondance entre la relation donnée à l’Equation 103 et
le modèle de Biot sur toute la gamme de porosités : la valeur de 1,35 a été identifiée comme
donnant les résultats les plus proches.

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
104
Figure 56 : Comparaison des vitesses obtenues dans la couche poreuse selon le modèle de Biot (trait continu rouge) et
avec la relation simplifiée (trait pointillé bleu).
La Figure 57 montre l’impédance acoustique du silicium poreux ¬fge$ en fonction de
la porosité. Sa valeur est comprise entre 19.65 MRayls et 1.5 MRayls, correspondant
respectivement au silicium cristallin et l’eau. Cette relation est strictement décroissante, ce qui
permet de déduire à la porosité du milieu à partir de son impédance acoustique.
Figure 57 : Evolution de l'impédance acoustique en fonction de la porosité.
3.3 Etude de convergence de l’algorithme génétique
Afin de vérifier la convergence de l’algorithme génétique, une étape de validation est
effectuée sur deux plaques d’aluminium, matériau dont les propriétés acoustiques sont bien
connues. Les épaisseurs de ces plaques sont 1.45 mm et 4 mm, pour l’échantillon 1 et 2
respectivement. Ces dimensions permettent d’observer un recouvrement partiel dans
l’échantillon 1 uniquement, afin de vérifier si l’algorithme génétique y est sensible. Pour cela,
les paramètres de l’algorithme génétique sont fixés afin de permettre une convergence
optimale et l’étude de la convergence de la vitesse de propagation de l’onde longitudinale et
de la densité en fonction du nombre de générations est effectuée.
Le dispositif expérimental utilisé pour cette étude est très proche de celui utilisé pour
la mesure des paramètres dans le domaine temporel (cf. Figure 41). Cependant les
transducteurs utilisés sont du modèle ISL0303VHR de la marque Technisonic, ayant une
fréquence centrale de 3,5MHz, ce qui permet d’avoir le même rapport longueur d’onde sur
épaisseur que dans le cas d’une mesure sur le silicium à 20 MHz. Ainsi le recouvrement du
signal traversant la plaque d’aluminium est du même type que celui observé avec des mesures

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
105
sur des plaquettes de silicium. Le matériel d’acquisition et de génération d’impulsion sont
identiques mais la fréquence d’échantillonnage est fixée à 250 MHz afin de diminuer le pas
fréquentiel des spectres obtenus.
3.3.1 Choix des paramètres de l’algorithme génétique
Le paramétrage de l’algorithme génétique est essentiel afin de permettre une bonne
convergence vers une solution globale. Ainsi le taux de mutation, la taille de la population et
le taux de croisement ont un impact sur le comportement général de la convergence.
Si la condition d’arrêt était un nombre de générations ou une stabilisation de la
fonction d’adaptation, un taux de mutation faible pourrait provoquer une convergence vers
une solution locale, ce qui est appelé une convergence prématurée. En effet, la recherche
aléatoire des solutions est alors peu ou pas effectuée. A contrario, un taux de mutation élevé
peut provoquer un phénomène de recherche aléatoire des solutions. Ceci est alors très délétère
pour la convergence de l’algorithme et peut provoquer des phénomènes d’oscillation [139].
La valeur optimale du taux de mutation pour un algorithme génétique avec une représentation
réelle des variables est située entre 5 et 20%, dans le cadre de petites populations [139]. La
taille de la population influence directement le temps nécessaire pour le calcul des phénotypes
des individus à chaque génération. Afin de permettre un nombre de génération plus élevé, la
taille de la population est fixée à 20 individus. Le taux de mutation est alors fixé à 20%.
Le paramètre non linéaire b, prenant en compte le vieillissement de la population,
permet de réduire l’intervalle de recherche au cours des générations (cf Figure 54). Ce
paramètre est fixe à 1,4 afin d’éviter une diminution trop brusque de l’intervalle exploré, ce
qui est une cause possible de convergence prématurée [138]. Le choix d’une telle loi non
monotone de mutation impose de choisir le nombre de générations comme condition d’arrêt.
Le croisement permet la convergence des individus vers la solution locale. Si le taux
est trop bas, la convergence est lente. Si le taux est trop élevé, une perte d’information est
provoquée par la destruction des meilleurs individus au profit des hybrides. Afin de faire un
compromis entre convergence et rapidité, ce paramètre est fixé à 70%, ce qui est la valeur
communément utilisée dans la littérature. L’élitisme est aussi utilisé afin de sauvegarder les
meilleurs individus et assurer la convergence [133]. Pour cela les deux meilleurs individus de
la génération précédente sont introduits dans la population, sans mutation ni croisement.

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
106
Enfin les bornes des variables qui sont ajustées sont aussi un paramètre important car
plus le domaine de définition est important, plus le temps de convergence est long. Dans le
cas de l’aluminium, les bornes choisies sont présentées au Tableau 11. Ces bornes sont
suffisamment éloignées pour pouvoir considérer une large gamme de matériaux possibles, et
ainsi observer le comportement de la convergence. Il est utile de rappeler que dans le cas de la
caractérisation du silicium poreux, de larges gammes de densité et de célérité peuvent être
observées durant la gravure électrochimique.
Tableau 11 : Bornes des paramètres pour la validation sur l'aluminium.
Variable Borne inférieure Borne supérieure
Masse volumique (kg.m-3) 1000 8000
Vitesse de l’onde
longitudinale (m.s-1) 1000 8000
3.3.2 Résultat de l’ajustement
Le signal qui est mesuré après la propagation des ondes ultrasonores à travers la
plaque d’aluminium est présenté à la Figure 58. Des recouvrements partiels sont identifiables
pour le signal correspondant à une propagation à travers l’échantillon 1. Concernant
l’échantillon 2, aucun recouvrement n’est observé, ce qui permettra de vérifier la cohérence
du modèle et de l’inversion dans un cas simple.
Figure 58 : Signaux temporels des ondes ayant traversé l'échantillon 1 (en bas) et 2 (en haut).
Afin d’observer le comportement de la convergence en fonction du nombre de
générations, l’ajustement est réitéré 200 fois pour trois valeurs du nombre de générations

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
107
(100,500,1000). Les moyennes et les écart-types des meilleurs individus après optimisation
sont alors calculés. Les valeurs recueillies pour l’échantillon 2 sont reportées au Tableau 12.
Tableau 12 : Convergence de l'algorithme en fonction du nombre de générations.
Nombre de générations 100 500 1000
Masse volumique
(kg/m3)
Moyenne 6366 6365 6365
Ecart type 4.95 (0.7 ‰) 0.60 (0.09 ‰) 0.21 (0.04 ‰)
Vitesse de l’onde
longitudinale (m/s)
Moyenne 2744 2764 2764
Ecart type 51.5 (18.8 ‰) 3.7 (1.4 ‰) 1.2 (0.4 ‰)
La moyenne des paramètres optimisés reste constante avec l’augmentation du nombre
de générations, ce qui confirme la convergence vers la même solution. Cependant la
diminution importante des écart-types avec le nombre de générations montre que la
convergence de l’algorithme génétique nécessite un certain nombre de générations pour être
satisfaisante. La valeur des écart-types observés pour 500 générations est de l’ordre du dix
millième de la vitesse et du millième de la densité. Ces valeurs sont en deçà de la précision
obtenue dans le cadre de mesures ultrasonores. Ainsi cette valeur semble un bon compromis
entre la précision et le temps de calcul nécessaire, qui est proportionnel au nombre de
générations. Cette valeur sera donc utilisée par la suite.
La Figure 59 présente le résultat de l’ajustement des spectres de transmission
théoriques U’ par rapport aux spectres U obtenus par la mesure expérimentale, après 500
générations. Ces spectres sont normalisés par rapport à la valeur maximale du spectre de
référence.

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
108
Figure 59 : Comparaison des spectres expérimentaux (croix rouges) et 500 générations d’optimisation (trait continu
noir) pour les échantillons 1 (droite) et 2 (gauche).
Les fréquences de résonance observées sur le spectre sont espacées de 2,2 MHz et 0,8
MHz, pour les échantillons 1 et 2 respectivement. En utilisant la formule Δ = * 12 ∗ 3⁄ et la vitesse de l’onde longitudinale dans l’aluminium (6380 m/s), les
épaisseurs calculées sont alors de 1,45 et 4 mm, comme attendu.
Comme déjà précisé précédemment, un filtrage des fréquences qui sont en dehors de la
bande passante des transducteurs est effectué en multipliant les spectres théoriques par le
spectre de référence. Ainsi les résonances autour de la fréquence centrale ont une amplitude
bien moindre. De plus, afin d’avoir une convergence qui soit reproductible, et donc des
distances similaires entre les différents essais, le spectre de référence est normalisé par sa
valeur maximale.
L’amplitude des deux spectres montre une bonne concordance, ce qui permettra une
bonne estimation de l’impédance acoustique. Les valeurs estimées grâce à la procédure
d’inversion sont présentés au Tableau 13.
L’erreur relative qui est estimée sur la détermination de la vitesse est faible et peut être
imputée en partie à l’incertitude de mesure de l’épaisseur de la plaque. L’erreur qui est
observée sur la densité est plus élevée et peut être expliquée en partie par le fait que les
atténuations sont considérées comme nulles dans l’eau et dans l’aluminium.
Tableau 13 : Valeurs des paramètres acoustiques estimés par inversion du problème.
Vitesse de l’onde
longitudinale (m/s)
Masse volumique
(kg/m3)
Valeurs théoriques 6380 2700
Echantillon 1 6365 2764
Erreur 0,2% 2,4%
Echantillon 2 6378 2787
Erreur 0,05% 3,2%

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
109
3.4 Discussions
Le paramétrage de l’algorithme génétique et l’étude de sa convergence sur des
échantillons d’aluminium a pu montrer que l’évolution de l’algorithme génétique est peu
dépendante du recouvrement des signaux temporels.
Grâce à l’étude de convergence, il a été montré que 500 générations permettent
d’obtenir une précision de l’ordre de 0.1 ‰ pour la vitesse de l’onde longitudinale et 1‰ pour
la masse volumique (cf. Tableau 12). Cette précision est supérieure à celle observée lors de la
mesure (cf. Tableau 13), dont l’erreur peut être due en partie à la mesure des paramètres, tel
que épaisseur. Il n’est donc pas nécessaire d’être plus précis lors de la convergence de
l’algorithme génétique.
Les autres paramètres choisis pour l’algorithme (taux de mutation, taille des
populations, taux de croisement et sélection) ont montré un bon comportement de
convergence et seront donc conservés pour les optimisations sur silicium poreux.
4 Méthode fréquentielle : Caractérisation de la couche de silicium
poreux
4.1 Présentation des échantillons
Afin de vérifier que la porosité et l’épaisseur peuvent être estimées en utilisant la
méthode fréquentielle, deux groupes d’échantillons sont créés : un groupe ayant une porosité
constante et un groupe ayant une épaisseur constante. Les échantillons utilisés dans ce
chapitre sont les échantillons 5 à 10, dont les conditions de gravure sont précisées au chapitre
1. Les paramètres (épaisseur et porosité) mesurés par méthode destructive, sont rappelés au
Tableau 14. Les échantillons 5 à 7 constituent le groupe d’échantillons ayant une porosité
sensiblement constante et les échantillons 7 à 10 correspondent aux échantillons ayant une
épaisseur sensiblement constante.
Tableau 14 : Description des échantillons utilisés dans la méthode fréquentielle.
Numéro d’échantillon 5 6 7 8 9 10
Épaisseur de la
couche poreuse (µm)
41 81 115 97 114 119
Porosité (%) 35,5 37,2 39,4 42,2 36,1 33,8

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
110
4.2 Expérience et paramétrage de l’ajustement
Il a été montré que 500 générations permettent une convergence correcte de
l’algorithme génétique, avec les paramètres explicités précédemment dans le cadre de
mesures effectuées dans l’aluminium. L’inversion de ce problème étant très proche de celle
étudiée précédemment (même modèle, même nombre d’inconnues), cette valeur est donc
utilisée avec le même paramétrage de l’algorithme génétique. Les bornes des paramètres
utilisés dans cette résolution de problème inverse sont présentées au Tableau 15. Ces bornes
sont limitées uniquement par les valeurs extrêmes possibles, sans considération a priori sur la
couche de silicium poreux.
Tableau 15 : Bornes des paramètres de la couche poreuse.
Vitesse de l’onde
longitudinale (m/s)
Masse volumique
(kg/m3)
Epaisseur
(µm)
Borne inférieure (OÃÄÅ3 1500 1000 0
Borne supérieure (OÃÇÈ3 8450 2330 600
Les mesures sont effectuées selon le même dispositif expérimental que dans le cas du
traitement temporel du signal, avec les mêmes transducteurs ISL2002VHR. L’enregistrement
du signal se fait cependant avec un pas temporel plus élevé, afin de favoriser le pas fréquentiel
(Δ = (k). Ainsi la fréquence d’échantillonnage est fixée à 250 MHz, avec un signal moyenné
sur 1024 enregistrements.
4.3 Résultats
4.3.1 Porosité constante
Les mesures sont effectuées sur les échantillons 5, 6 et 7. Ils possèdent une porosité
estimée à 40% lors de la gravure.
L’ajustement du spectre de transmission théorique sur l’expérience présente une bonne
concordance, comme montré à la Figure 60. Cette optimisation est effectuée entre 5 et 30
MHz afin d’utiliser suffisamment de résonances pour permettre une identification correcte de
l’épaisseur et de l’impédance acoustique de la couche poreuse.

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
111
Figure 60 : Comparaison du spectre expérimental (croix rouges) et du spectre optimisé après 500 générations (en trait
continu) pour l’échantillon 7.
Il peut être observé que les amplitudes des résonances diffèrent légèrement de
l’expérience. Cela peut être dû en partie à la variation de la porosité avec la profondeur de
gravure, ainsi qu’au fait que les interfaces Si-PoSi ne sont pas parfaitement planes.
Cependant une bonne concordance est observée sur les fréquences de résonances au
sein du spectre. Ces résonances étant dues aux allers-retours au sein des couches de silicium
poreux et cristallin, cela permettra une bonne détermination de la valeur du couple (fge$, Nfge$). L’épaisseur de la couche poreuse retrouvée en utilisant la méthode acoustique est
comparée à la méthode de mesure destructive au Tableau 16. Cette épaisseur est ramenée en
longueur d’onde au sein de la couche poreuse, pour une porosité de 40%. Elle est déterminée
en prenant en compte la valeur de vitesse de propagation de l’onde longitudinale rapide
obtenue grâce au modèle de Biot et une fréquence de 20 MHz grâce à l’Equation 104. Sa
valeur est ainsi de 250 µm.
Z)% = *fge$140%3 = 497520 ∗ 10Y ≈ 250μ+ (3)
Tableau 16: Résultat de l'optimisation pour l'épaisseur de la couche poreuse et comparaison avec les mesures
destructives.
Numéro d’échantillon 5 6 7
Méthode destructive (µm) 41 81 115

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
112
Méthode acoustique µm 37 89 121 Z)% 0,15 0,36 0,48
Erreur % 9 ,8 9,8 5,2 Z)% 0.016 0.032 0.024
Malgré le fait que les épaisseurs mesurées soient faibles comparées à la longueur
d’onde, l’erreur d’estimation par la méthode ultrasonore est inférieure à 10%. Cette erreur est
de l’ordre de 3% de la longueur d’onde, et ce même avec des recouvrements partiels
importants (cas de l’échantillon 5). L’erreur observée peut être due en partie au fait que la
mesure destructive est très locale, alors que la mesure acoustique est une moyenne sur la
surface du faisceau acoustique. En effet, le processus de gravure électrochimique provoque
une variation locale de la profondeur de gravure, qui peut être important dans le cadre de
fortes épaisseurs.
4.3.2 Profondeur de gravure constante
Les mesures sont effectuées sur les échantillons 7 à 10. Ils possèdent une profondeur
estimée à 120 µm lors de la gravure. L’ajustement est identique à celui réalisé pour la
détermination de l’épaisseur et une comparaison entre expérience et théorie est présenté à la
Figure 61 pour l’échantillon 8. Les spectres obtenus sont très similaires à celui de
l’échantillon 7, présenté Figure 60. Cependant les variations d’amplitudes et de fréquences
des résonances dénotent une modification des paramètres de la couche poreuse (épaisseur et
porosité).
Figure 61 : Comparaison du spectre expérimental (croix rouges) et du spectre optimisé après 500 générations (trait
continu noir) pour l’échantillon 8.

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
113
Figure 62 : Comparaison de la relation − avec les valeurs experimentales.
Grâce à la relation entre l’impédance acoustique et la porosité proposée
précédemment, il est possible d’estimer la porosité à partir des valeurs expérimentales. Afin
de vérifier la concordance de cette relation, les valeurs expérimentales sont comparées à cette
relation à la Figure 62. L’impédance acoustique est mesurée par méthode ultrasonore et la
porosité de la couche est mesurée grâce à la méthode destructive.
Les valeurs expérimentales sont légèrement inférieures à celles prédites par le modèle.
Cette déviation peut être en partie due à la perte de masse qui a lieu lors du clivage des
échantillons afin de permettre la mesure optique de l’épaisseur. Ainsi, une sous estimation des
masses +! et + de la méthode gravimétrique provoque une baisse de la valeur de porosité
obtenue par la méthode destructive.
Les valeurs de porosité obtenues grâce au modèle sont comparées à celles obtenues par
méthode destructive au Tableau 8. Les valeurs sont proches et l’erreur relative maximale est
de 5.4%.
Tableau 17 : Résultat de l'inversion du modèle pour la porosité et comparaison avec la méthode destructive.
Numéro d’échantillon 7 8 9 10
Méthode destructive 39.4 % 42.2 % 36.1 % 33.8 %
Méthode acoustique 40.9 % 44.5 % 37.4 % 33.9 %
Erreur relative 3.8 5.4 3.6 0.2
4.3.3 Variation de porosité en fonction de la profondeur
Il a été observé dans la littérature [140] des variations de la porosité en fonction de
l’épaisseur, particulièrement pour les couches poreuses les plus épaisses. Ceci peut être une

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
114
explication de l’erreur d’estimation car le modèle utilisé jusqu’ici faisait l’hypothèse d’une
porosité constante.
Un modèle multicouche de la zone poreuse est donc proposé afin de prendre en
compte la variation de porosité avec la profondeur. Il est appliqué aux échantillons 5, 6 et 7
(Tableau 14). Cette représentation utilise la même modélisation que la représentation
fréquentielle, l’épaisseur fge$ étant divisée en n couches d’épaisseur e.
Figure 63 : Modélisation multicouche de la partie poreuse de la plaquette.
Les fonctions d’interpolation utilisées afin de suivre l’évolution de la porosité en
fonction de la profondeur Ö sont de trois types : linéaire, de forme puissance ou logarithmique
(cf Equation 105). La porosité est fixée pour le point médian de la couche. Utilisant ces
valeurs de porosité, la vitesse et la densité de la couche sont mesurée en utilisant les relations
données aux Equations 87 et 103.
j1Ö3 = j$v$ + bÖ j1Ö3 = j$v$ + bÖv j1Ö3 = j$v$ + ln11 + bÖ3 (4)
L’optimisation est effectuée sur les 3 échantillons en même temps (5, 6 et 7) afin de
limiter l’erreur d’ajustement des différentes fonctions. En effet, les échantillons ont été gravés
dans la même solution d’acide fluorhydrique, avec les mêmes substrats et la même densité de
courant. Ainsi les variations de porosité sont théoriquement les mêmes dans les 3 échantillons
et la porosité initiale j$v$ est identique.
L’épaisseur de silicium poreux est divisée en un ensemble de 5 couches. Les variables
optimisées sont l’épaisseur de la couche poreuse (fge$) ainsi que les paramètres de chaque

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
115
fonction d’interpolation. Le nombre d’inconnues et de couches étant plus important, une étude
de convergence est effectuée et montre que 2500 générations sont nécessaires pour une
stabilisation des paramètres.
Les résultats obtenus pour chaque fonction d’interpolation sont présentés au Tableau
18.
Aucune différence significative n’est observée selon la fonction d’interpolation
utilisée, ce qui indique que la fonction d’évolution de la porosité en fonction de la profondeur
peut être considérée comme linéaire. Cette hypothèse pourra être vérifiée lors d’une mesure
en cours de gravure, où chaque couche correspondra à une durée précise de gravure. Ce
faisant, l’évolution des paramètres de la couche poreuse (épaisseur et porosité) au cours du
temps pourra être estimée.
Tableau 18 : Valeurs des paramètres du modèle multicouche après optimisation pour les différentes fonctions
d'interpolation et rappel des résultats de la mesure destructive.
Type de fonction Linéaire Puissance Logarithmique Mesure
destructive
fge$ Echantillon 7 113 115 115 115
Echantillon 6 70 70 70 81
Echantillon 5 36 35 35 41 j$v$ 30.8 30.8 30.8 / b 62 56.5 65 / / 2.7 / /
4.4 Discussions
La mesure des paramètres de la couche poreuse grâce au traitement fréquentiel des
signaux a permis la détermination de l’ensemble des inconnues (épaisseur et porosité) en une
seule mesure, sans connaissance à priori des propriétés des échantillons.
Ainsi la bonne concordance entre les spectres expérimentaux et théoriques, tant en
fréquence de résonance qu’en amplitude, permet d’estimer précisément les paramètres
épaisseur et impédance acoustique de la couche poreuse. L’erreur maximale en profondeur est
ainsi de 10% en amplitude, correspondant à 3% de la longueur d’onde. Cette erreur est faible
au vu du recouvrement important observé sur les signaux temporels. L’erreur maximale sur la

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
116
porosité est de 5.4%, ce qui est inférieur à la plage d’estimation lors de la gravure, qui est à
plus ou moins 10% près.
Enfin un modèle multicouche a été développé afin de tenir compte de l’évolution de la
porosité en fonction de la profondeur observée lors de la mesure destructive. En première
approximation, la loi d’évolution de la porosité en fonction de la profondeur est linéaire, ce
qui doit être confirmé par des mesures in situ de suivi de gravure.
5 Conclusion
Ce chapitre a permis de montrer comment la couche de silicium poreux peut être
caractérisée pendant la gravure électrochimique. La méthode d’insertion–substitution ainsi
que ces avantages sont présentées.
Les méthodes de mesure des paramètres acoustiques grâce aux signaux temporels sont
expliquées. Il est montré que la mesure de 2 temps de vols et de 2 amplitudes sont nécessaires
et suffisantes pour obtenir les paramètres géométriques et acoustiques de la couche poreuse.
Cependant, le recouvrement important des signaux empêche la mesure des deux temps de vol.
En utilisant les épaisseurs, mesurées a posteriori, la vitesse de propagation est mesurée et
l’atténuation est estimée. Ces paramètres permettent la détermination de l’épaisseur de la
couche poreuse dans des conditions de gravures similaires, ouvrant la voie à un suivi de la
gravure électrochimique. Afin de permettre la mesure du deuxième temps de vol, une
déconvolution est effectuée. Cependant, bien que les signaux reconstruits soient très proches
des signaux originaux, les trains d’impulsion ne correspondent pas à la réalité du système, ne
permettant donc pas une mesure fiable des temps de vol et des amplitudes.
Afin de permettre la détermination de tous les paramètres acoustiques et géométriques
de la couche poreuse en une seule mesure, un traitement fréquentiel des signaux est effectué.
Le modèle utilisé afin de calculer les spectres théoriques de transmission des ondes
ultrasonores au travers du matériau bicouche permet une inversion du problème. Pour cela, un
algorithme génétique a été implémenté et ses paramètres optimisés pour cette application.
Ainsi les paramètres de porosité et d’épaisseur des couches de silicium poreux peuvent être
déterminés simultanément sur un seul échantillon.
Une extension du modèle a été faite afin de voir l’évolution de la porosité en fonction
de la profondeur, ceci ayant été observé sur les échantillons. Cela a permis de montrer que la

Chapitre 3 : Caractérisation Ultrasonore Du Silicium Poreux
117
porosité semblait augmenter de façon linéaire, ce qui pourra être vérifié en faisant des
mesures in situ de la gravure électrochimique du silicium.

Conclusions et perspectives
118
Conclusions et perspectives

Conclusions et perspectives
119
Ce travail de thèse a porté sur la mise en place d’une méthode de caractérisation non
destructive du silicium poreux par ultrasons afin de déterminer les paramètres de la couche
poreuse du silicium poreux, tels que la porosité et la profondeur de gravure. La méthode a été
développée de telle sorte qu’elle puisse à terme être utilisée in situ et en temps réel pendant la
gravure.
Des échantillons de silicium poreux ont d’abord été gravés en utilisant un équipement
disponible au sein du laboratoire GREMAN. Le type de silicium poreux choisi pour cette
étude est du type mésoporeux, semblable à celui qui sert de substrat pour des composants RF
passifs (circuits de filtrage). Une caractérisation par méthode destructive (microscope optique
et gravimétrie) a été effectuée après les mesures ultrasonores.
L’étude des matériaux poreux et l’application du modèle de Biot aux couches de
silicium gravées pendant la thèse a permis de constater que l’onde lente, prévue par le modèle,
n’est pas observable dans la gamme de fréquence utilisée. Un modèle matriciel a été
implémenté afin de calculer la propagation d’une onde ultrasonore au sein d’une structure
multicouche correspondant à une plaquette de silicium gravée.
Afin de permettre à terme la mesure au sein de la cuve de gravure, le dispositif
expérimental choisi afin de caractériser le matériau bicouche formé par la plaquette de
silicium gravée est la méthode d’insertion-substitution. En effet, cette méthode est compatible
avec les conditions in situ de gravure, où la disposition des transducteurs ne permet qu’une
incidence normale des ondes et dont le fluide d’immersion a des propriétés acoustiques
proches de l’eau. De plus, cette méthode permet de s’affranchir des étapes de calibration des
transducteurs grâce à un tir de référence. Ce faisant, les mesures sont peu dépendantes du
fluide et des transducteurs, permettant des mesures absolues des coefficients de transmission
et donc des impédances acoustiques.

Conclusions et perspectives
120
Afin de déterminer ces paramètres à partir d’un traitement temporel des données, il a
été montré que la mesure de 2 temps de vols et de deux amplitudes est nécessaire et
suffisantes. Cela requiert une séparation temporelle des signaux lors de la réception des
signaux, ce qui n’est pas possible dans nos échantillons avec des transducteurs ayant une
fréquence centrale de 20MHz. Le recouvrement des signaux temporels qui est observés
pourrait être limité, voire annulé, en augmentant la fréquence de fonctionnement des
transducteurs. Cependant l’atténuation deviendrait alors importante dans la couche de silicium
poreux et les fluides, ce qui nuirait à une mesure précise des amplitudes. La méthode permet
néanmoins le suivi de l’épaisseur en considérant que la porosité est constante et similaire à
celle observée sur un autre échantillon gravé selon les mêmes conditions.
Afin d’améliorer la caractérisation de la couche poreuse, une étape de traitement de
signal a été préférée à une augmentation de la fréquence de travail. Une déconvolution en
utilisant l’algorithme de Gold a été implémentée afin de reconstruire le train d’impulsions
correspondant aux différents signaux enregistrés au niveau du récepteur. Pour cela une
hypothèse de non-négativité des signaux a été posée, ce qui a été permis par l’utilisation de la
transformée de Hilbert pour le calcul des enveloppes des signaux temporels.
Malheureusement, malgré une bonne concordance entre signaux simulés et mesurés, les trains
d’impulsions issus de ce traitement ne correspondent pas à ceux d’un milieu bicouche. En
effet, ils ne présentent pas les périodicités correspondant aux allers-retours au sein de chaque
couche. Ainsi nous concluons que la méthode basée sur la déconvolution ne fournit pas une
solution unique, ce qui empêche la détermination des paramètres de la couche poreuse.
Afin de permettre une détermination plus robuste des paramètres de la couche poreuse,
un traitement fréquentiel des signaux est proposé. La mesure directe des paramètres sur le
spectre expérimental est complexe, à cause des couplages entre les différentes couches et du
fluide utilisé pour la mesure. Ainsi une procédure d’inversion est implémentée afin de
déterminer les variables épaisseur fge$ et impédance acoustique ¬fge$ . Etant donné la
présence de plusieurs minimas, une optimisation globale, basée sur un algorithme génétique
est proposée. La convergence de cet algorithme en présence de recouvrements est étudiée sur
des plaques d’aluminium afin d’optimiser ses paramètres. Dans le cadre du silicium poreux,
une relation ¬fge$ − j est trouvée et utilisée afin de permettre la détermination de la porosité
à partir de l’impédance acoustique, qui est un paramètre plus aisé à optimiser. Grâce à cela,

Conclusions et perspectives
121
les paramètres épaisseur et porosité ont été déterminés de façon simultanée avec une erreur
maximale de 10% sur le paramètre épaisseur et 5% sur la porosité.
Afin de permettre la prise en compte d’une variation de porosité en fonction de la
profondeur telle qu’elle a été reportée dans la littérature, la couche poreuse est modélisée
comme un matériau multicouche, dont chaque couche a une porosité propre.
Cette modélisation s’applique bien à la problématique de suivi de gravure en temps
réel, où chaque couche formée durant un temps déterminé peut être caractérisée et ainsi de
suite pour les couches successives jusqu’à la fin de la gravure. Ainsi, en perspective, cette
méthode de caractérisation pourrait permettre une correction des paramètres de gravure du
silicium en temps réel, c'est-à-dire de choisir les paramètres optimaux pour la couche poreuse
en cours de gravure et de corriger les dérives éventuelles en porosité. Cette correction pourrait
prendre la forme d’un asservissement en courant afin d’obtenir la porosité souhaitée, ou le
profil de porosité souhaité, jusqu’à la profondeur souhaitée. Une telle méthode représenterait
un réel progrès en terme de reproductibilité de gravure du silicium et ouvrirait des possibilités
de créer des profils de porosités parfaitement controlés.

Bibliographie
122
Bibliographie

123
[1] Solokov, “On the problem of the propagation of ultrasonic oscillations in various
bodies,” Elek. Nachr. Tech, 1929.
[2] F. A. Firestone, “Flaw detecting device and measuring instrument,” US2280226
A1942.
[3] A. Uhlir, “Electrolytic Shaping of Germanium and Silicon,” Bell System Technical
Journal, vol. 35, no. 2, pp. 333–347, Mar. 1956.
[4] C. S. Fuller and J. A. Ditzenberger, “Diffusion of Donor and Acceptor Elements in
Silicon,” Journal of Applied Physics, vol. 27, no. 5, p. 544, 1956.
[5] V. Parkhutik, “Analysis of Publications on Porous Silicon: From Photoluminescence to
Biology,” Journal of Porous Materials, vol. 7, pp. 363–366, 2000.
[6] M. R. Poponiak, “Method for gettering contaminants in monocrystalline silicon,” 1975.
[7] B. Geoffrey, “Thermal migration-porous silicon technique for forming deep dielectric
isolation,” 41804161978.
[8] K. Imai and Y. Yoriume, “Application of IPOS technique to MOS ICs,” Japanese
Journal of Applied Physics, vol. 18S1, no. Supplement 18–1, pp. 281–285, 1979.
[9] C. Pickering, M. I. J. Beale, D. J. Robbins, P. J. Pearson, and R. Greef, “Optical studies
of the structure of porous silicon films formed in p-type degenerate and non-degenerate
silicon,” Journal of Physics C: Solid State Physics, vol. 17, no. 35, pp. 6535–6552,
Dec. 1984.
[10] B. G. Streetman, Solid state electronic devices. Prentice-Hall, 1990.
[11] L. T. Canham, “Silicon quantum wire array fabrication by electrochemical and
chemical dissolution of wafers,” Applied Physics Letters, vol. 57, no. 10, p. 1046,
1990.
[12] V. Lehmann and U. Gösele, “Porous silicon formation: A quantum wire effect,”
Applied Physics Letters, vol. 58, no. 8, p. 856, 1991.

124
[13] K. D. Hirschman, L. Tsybeskov, S. P. Duttagupta, and P. M. Fauchet, “Silicon-based
visible light-emitting devices integrated into microelectronic circuits,” Nature, vol.
384, no. 6607, pp. 338–341, Nov. 1996.
[14] L. T. Canham, T. I. Cox, and W. Y. Leong, “Electroluminescent silicon device,”
55613041996.
[15] T. Karacali, B. Cakmak, and H. Efeoglu, “Aging of porous silicon and the origin of
blue shift,” Optics Express, vol. 11, no. 10, p. 1237, May 2003.
[16] P. M. Fauchet, J. von Behren, K. D. Hirschman, L. Tsybeskov, and S. P. Duttagupta,
“Porous Silicon Physics and Device Applications: A Status Report,” physica status
solidi (a), vol. 165, no. 1, pp. 3–13, Jan. 1998.
[17] T. Defforge, J. Billoué, M. Diatta, F. Tran-Van, and G. Gautier, “Copper-selective
electrochemical filling of macropore arrays for through-silicon via applications.,”
Nanoscale research letters, vol. 7, no. 1, p. 375, Jan. 2012.
[18] M. Capelle, J. Billoué, P. Poveda, G. Gautier, and A. S. Anodization, “N-Type Porous
Silicon Substrates for Integrated RF Inductors,” vol. 58, no. 11, pp. 4111–4114, 2011.
[19] G. Gautier, M. Capelle, J. Billoué, F. Cayrel, and P. Poveda, “RF Planar Inductor
Electrical Performances on n-Type Porous 4H Silicon Carbide,” vol. 33, no. 4, pp.
477–479, 2012.
[20] G. Barillaro, P. Bruschi, F. Pieri, and L. M. Strambini, “CMOS-compatible fabrication
of porous silicon gas sensors and their readout electronics on the same chip,” physica
status solidi (a), vol. 204, no. 5, pp. 1423–1428, May 2007.
[21] S. Matthias, F. Müller, C. Jamois, R. B. Wehrspohn, and U. Gïsele, “Large-Area
Three-Dimensional Structuring by Electrochemical Etching and Lithography,”
Advanced Materials, vol. 16, no. 23–24, pp. 2166–2170, Dec. 2004.
[22] C. C. Striemer, T. R. Gaborski, J. L. McGrath, and P. M. Fauchet, “Charge- and size-
based separation of macromolecules using ultrathin silicon membranes.,” Nature, vol.
445, no. 7129, pp. 749–53, Feb. 2007.

125
[23] J.-H. Park, L. Gu, G. von Maltzahn, E. Ruoslahti, S. N. Bhatia, and M. J. Sailor,
“Biodegradable luminescent porous silicon nanoparticles for in vivo applications.,”
Nature materials, vol. 8, no. 4, pp. 331–6, Apr. 2009.
[24] A. Loni and L. T. Canham, “Mesoporous silicon in toothpaste,” in PPST 2008, 2008, p.
153.
[25] M. du Plessis, “Investigating nanoporous silicon explosive devices,” physica status
solidi (c), vol. 6, no. 7, pp. 1763–1768, Jul. 2009.
[26] R. J. Archer, “Stain films on silicon,” Journal of Physics and Chemistry of Solids, vol.
14, pp. 104–110, Jul. 1960.
[27] E. A. de Vasconcelos, E. F. da Silva, B. E. C. A. dos Santos, W. M. de Azevedo, and J.
A. K. Freire, “A new method for luminescent porous silicon formation: reaction-
induced vapor-phase stain etch,” physica status solidi (a), vol. 202, no. 8, pp. 1539–
1542, Jun. 2005.
[28] M. Orchin, R. S. Macomber, A. R. Pinhas, and R. M. Wilson, The Vocabulary and
Concepts of Organic Chemistry. Wiley, 2005.
[29] S. Siagian, K. Basar, T. Sakuma, H. Takahashi, N. Igawa, and Y. Ishii, “Inter-atomic
distance and temperature dependence of correlation effects among thermal
displacements,” Solid State Ionics, vol. 180, no. 6–8, pp. 480–482, May 2009.
[30] W. Bludau, A. Onton, and W. Heinke, “Temperature dependence of the band gap of
silicon,” Journal of Applied Physics, vol. 45, no. 4, p. 1846, 1974.
[31] C. Kittel, Introduction to solid state physics. Wiley, 1971.
[32] W. M. Haynes and D. R. Lide, CRC Handbook of Chemistry and Physics: A Ready-
reference Book of Chemical and Physical Data. CRC Press, 2010.
[33] J. S. Steinhart and S. R. Hart, “Calibration curves for thermistors,” Deep Sea Research
and Oceanographic Abstracts, vol. 15, no. 4, pp. 497–503, Aug. 1968.
[34] Chovet and Masson, “Cours de physique des SC.” 2005.

126
[35] A. B. Sproul and M. A. Green, “Improved value for the silicon intrinsic carrier
concentration from 275 to 375 K,” Journal of Applied Physics, vol. 70, no. 2, p. 846,
1991.
[36] R. L. Smith and S. D. Collins, “Porous silicon formation mechanisms,” Journal of
Applied Physics, vol. 71, no. 8, p. R1, 1992.
[37] S. Ottow, G. S. Popkirov, and H. Föll, “Determination of flat-band potentials of silicon
electrodes in HF by means of ac resistance measurements,” Journal of
Electroanalytical Chemistry, vol. 455, no. 1–2, pp. 29–37, Sep. 1998.
[38] X. G. Zhang, “Porous Silicon Formation and Electropolishing of Silicon by Anodic
Polarization in HF Solution,” Journal of The Electrochemical Society, vol. 136, no. 5,
p. 1561, 1989.
[39] C. Serre, S. Barret, and R. Hérino, “Influence of the electrolyte composition and pH on
the anodic dissolution of p-type Si in aqueous HF solutions,” Journal of
Electroanalytical Chemistry, vol. 370, no. 1–2, pp. 145–149, Jun. 1994.
[40] T. Oku, R. Hattori, and K. Sato, “Mechanism for Breakage of Si-O Networks of SiO2
Films in HF Solutions,” MRS Proceedings, vol. 492, p. 213, Feb. 2011.
[41] V. Lehmann, R. Stengl, and A. Luigart, “On the morphology and the electrochemical
formation mechanism of mesoporous silicon,” Materials Science and Engineering: B,
vol. 69–70, pp. 11–22, 2000.
[42] K. S. W. Sing, “Reporting physisorption data for gas/solid systems with special
reference to the determination of surface area and porosity (Recommendations 1984),”
Pure and Applied Chemistry, vol. 57, no. 4, pp. 603–619, 1985.
[43] G. Gautier, “Etude de Procédés d’Élaboration de Substrats Mixtes Silicium/Silicium
Poreux Pour l'Iintégration de Systèmes Microélectroniques,” 2010.
[44] M. Guendouz, P. Joubert, and M. Sarret, “Effect of crystallographic directions on
porous silicon formation on patterned substrates,” Materials Science and Engineering:
B, vol. 69–70, pp. 43–47, 2000.

127
[45] V. Lehmann, “The Physics of Macropore Formation in Low Doped n-Type Silicon,”
Journal of The Electrochemical Society, vol. 140, no. 10, p. 2836, 1993.
[46] X. G. Zhang, Electrochemistry of Silicon and Its Oxide. Springer, 2001.
[47] L. Pavesi, “Porous silicon dielectric multilayers and microcavities,” La Rivista del
Nuovo Cimento, vol. 20, no. 10, pp. 1–76, Oct. 1997.
[48] Y. Arita, “Formation and Properties of Porous Silicon Film,” Journal of The
Electrochemical Society, vol. 124, no. 2, p. 285, 1977.
[49] X. G. Zhang, “Porous Silicon Formation and Electropolishing of Silicon by Anodic
Polarization in HF Solution,” Journal of The Electrochemical Society, vol. 136, no. 5,
p. 1561, 1989.
[50] G. Bomchil, A. Halimaoui, and R. Herino, “Porous silicon: The material and its
applications to SOI technologies,” Microelectronic Engineering, vol. 8, no. 3–4, pp.
293–310, Dec. 1988.
[51] T. L. S. L. Wijesinghe, E. J. Teo, and D. J. Blackwood, “Potentiostatic formation of
porous silicon in dilute HF: Evidence that nanocrystal size is not restricted by quantum
confinement,” Electrochimica Acta, vol. 53, no. 13, pp. 4381–4386, May 2008.
[52] C. S. Solanki, R. R. Bilyalov, J. Poortmans, J.-P. Celis, and J. Nijs, “Effect of the
composition of electrolyte on separation of porous silicon film by electrochemical
etching,” physica status solidi (a), vol. 197, no. 2, pp. 507–511, May 2003.
[53] E. Méry, C. Malhaire, B. Remaki, and D. Barbier, “Electrical study of microfluidic
channels isolated with chemically modified porous silicon,” physica status solidi (c),
vol. 4, no. 6, pp. 2098–2102, May 2007.
[54] G. W. Scherer, “Recent progress in drying of gels,” Journal of Non-Crystalline Solids,
vol. 147–148, pp. 363–374, Jan. 1992.
[55] O. Belmont, D. Bellet, and Y. Bréchet, “Study of the cracking of highly porous p+ type
silicon during drying,” Journal of Applied Physics, vol. 79, no. 10, p. 7586, 1996.

128
[56] L. T. Canham, A. G. Cullis, C. Pickering, O. D. Dosser, T. I. Cox, and T. P. Lynch,
“Luminescent anodized silicon aerocrystal networks prepared by supercritical drying,”
Nature, vol. 368, no. 6467, pp. 133–135, Mar. 1994.
[57] A. Parisini, R. Angelucci, L. Dori, A. Poggi, P. Maccagnani, G. C. Cardinali, G.
Amato, G. Lerondel, and D. Midellino, “TEM characterisation of porous silicon,”
Micron, vol. 31, no. 3, pp. 223–230, Jun. 2000.
[58] O. Bisi, S. Ossicini, and L. Pavesi, “Porous silicon: a quantum sponge structure for
silicon based optoelectronics,” Surface Science Reports, vol. 38, no. 1–3, pp. 1–126,
Apr. 2000.
[59] D. Buttard, D. Bellet, G. Dolino, and T. Baumbach, “Thin layers and multilayers of
porous silicon: X-ray diffraction investigation,” Journal of Applied Physics, vol. 83,
no. 11, p. 5814, 1998.
[60] M. Ehbrecht, B. Kohn, F. Huisken, M. Laguna, and V. Paillard, “Photoluminescence
and resonant Raman spectra of silicon films produced by size-selected cluster beam
deposition,” Physical Review B, vol. 56, no. 11, pp. 6958–6964, Sep. 1997.
[61] M. N. Islam, A. Pradhan, and S. Kumar, “Effects of crystallite size distribution on the
Raman-scattering profiles of silicon nanostructures,” Journal of Applied Physics, vol.
98, no. 2, p. 024309, 2005.
[62] R. Herino, “Porosity and Pore Size Distributions of Porous Silicon Layers,” Journal of
The Electrochemical Society, vol. 134, no. 8, p. 1994, 1987.
[63] E. P. Barrett, L. G. Joyner, and P. P. Halenda, “The Determination of Pore Volume and
Area Distributions in Porous Substances. I. Computations from Nitrogen Isotherms,”
Journal of the American Chemical Society, vol. 73, no. 1, pp. 373–380, 1951.
[64] F. Ferrieu, A. Halimaoui, and D. Bensahel, “Optical characterisation of porous silicon
layers by spectrometric ellipsometry in the 1.5–5 eV range,” Solid State
Communications, vol. 84, no. 3, pp. 293–296, Oct. 1992.

129
[65] M. Fried, T. Lohner, O. Polgár, P. Petrik, É. Vázsonyi, I. Bársony, J. . Piel, and J. .
Stehle, “Characterization of different porous silicon structures by spectroscopic
ellipsometry,” Thin Solid Films, vol. 276, no. 1–2, pp. 223–227, Apr. 1996.
[66] V. A. Tolmachev, “An adsorption ellipsometric method for studying porous films and
coatings,” Russian Microelectronics, vol. 29, no. 5, pp. 331–344, Sep. 2000.
[67] J. Sailor, Porous Silicon in Practice: Preparation, Characterization and Applications.
Wiley, 2012.
[68] J. Riikonen, M. Salomäki, J. van Wonderen, M. Kemell, W. Xu, O. Korhonen, M.
Ritala, F. MacMillan, J. Salonen, and V.-P. Lehto, “Surface chemistry, reactivity, and
pore structure of porous silicon oxidized by various methods.,” Langmuir : the ACS
journal of surfaces and colloids, vol. 28, no. 28, pp. 10573–83, Jul. 2012.
[69] D. B. Mawhinney, J. A. Glass, and J. T. Yates, “FTIR Study of the Oxidation of Porous
Silicon,” The Journal of Physical Chemistry B, vol. 101, no. 7, pp. 1202–1206, Feb.
1997.
[70] J. Shao, W. Lu, X. Lü, F. Yue, Z. Li, S. Guo, and J. Chu, “Modulated
photoluminescence spectroscopy with a step-scan Fourier transform infrared
spectrometer,” Review of Scientific Instruments, vol. 77, no. 6, p. 063104, 2006.
[71] T. Bourbié, O. Coussy, and B. Zinszner, Acoustique des milieux poreux. Technip, 1986.
[72] P. W. Choquette and L. C. Pray, “Geologic nomenclature and classification of porosity
in sedimentary carbonates,” AAPG Bulletin, vol. 54, no. 2, pp. 207–244, 1970.
[73] G. Matheron, Eléments pour une théorie des milieux poreux. Masson et Cie, 1967.
[74] E. Rohan, S. Naili, R. Cimrman, and T. Lemaire, “Multiscale modeling of a fluid
saturated medium with double porosity: Relevance to the compact bone,” Journal of
the Mechanics and Physics of Solids, vol. 60, no. 5, pp. 857–881, May 2012.
[75] N. Epstein, “On tortuosity and the tortuosity factor in flow and diffusion through
porous media,” Chemical Engineering Science, vol. 44, no. 3, pp. 777–779, Jan. 1989.

130
[76] H. Darcy, “Les Fontaines Publiques de la Ville de Dijon.” 1856.
[77] D. L. Johnson, J. Koplik, and L. M. Schwartz, “New Pore-Size Parameter
Characterizing Transport in Porous Media,” Physical Review Letters, vol. 57, no. 20,
pp. 2564–2567, Nov. 1986.
[78] A. Cortis, D. M. J. Smeulders, J. L. Guermond, and D. Lafarge, “Influence of pore
roughness on high-frequency permeability,” Physics of Fluids, vol. 15, no. 6, p. 1766,
2003.
[79] H. Giesche, “Mercury Porosimetry: A General (Practical) Overview,” Particle &
Particle Systems Characterization, vol. 23, no. 1, pp. 9–19, Jun. 2006.
[80] D. Schoonderbeek, F. Thiel, and E. B. A. Bisdom, “Quantimet 720 Analysis of
Porosities in Backscattered Electron Scanning Images Made with Different Photo-
Techniques,” in in Submicroscopic Studies of Soils, vol. 12, E. B. A. Bisdom and J.
Ducloux, Eds. Elsevier, 1983, pp. 271–275.
[81] C. Perrot, R. Panneton, and X. Olny, “Periodic unit cell reconstruction of porous
media: Application to open-cell aluminum foams,” Journal of Applied Physics, vol.
101, no. 11, p. 113538, 2007.
[82] J.-P. R. A. Sweerts, C. A. Kelly, J. W. M. Rudd, R. Hesslein, and T. E. Cappenberg,
“Similarity of whole-sediment molecular diffusion coefficients in freshwater sediments
of low and high porosity,” Limnology and Oceanography, vol. 36, no. 2, pp. 335–341,
1991.
[83] R. E. McDuff and R. A. Ellis, “Determining diffusion coefficients in marine sediments;
a laboratory study of the validity of resistivity techniques,” American Journal of
Science, vol. 279, no. 6, pp. 666–675, Jun. 1979.
[84] L. Shen and Z. Chen, “Critical review of the impact of tortuosity on diffusion,”
Chemical Engineering Science, vol. 62, no. 14, pp. 3748–3755, 2007.
[85] E. E. Petersen, “Diffusion in a pore of varying cross section,” AIChE Journal, vol. 4,
no. 3, pp. 343–345, Sep. 1958.

131
[86] R. C. Dykhuizen and W. H. Casey, “An analysis of solute diffusion in rocks,”
Geochimica et Cosmochimica Acta, vol. 53, no. 11, pp. 2797–2805, Nov. 1989.
[87] J. C. Maxwell, A Treatise on Electricity and Magnetism. Cambridge: Cambridge
University Press, 1873.
[88] G. H. Neale and W. K. Nader, “Prediction of transport processes within porous media:
Diffusive flow processes within an homogeneous swarm of spherical particles,” AIChE
Journal, vol. 19, no. 1, pp. 112–119, Jan. 1973.
[89] H. L. Weissberg, “Effective Diffusion Coefficient in Porous Media,” Journal of
Applied Physics, vol. 34, no. 9, p. 2636, 1963.
[90] M. M. Tomadakis and S. V. Sotirchos, “Transport properties of random arrays of freely
overlapping cylinders with various orientation distributions,” The Journal of Chemical
Physics, vol. 98, no. 1, p. 616, 1993.
[91] N. Iversen and B. B. Jørgensen, “Diffusion coefficients of sulfate and methane in
marine sediments: Influence of porosity,” Geochimica et Cosmochimica Acta, vol. 57,
no. 3, pp. 571–578, Feb. 1993.
[92] A. Lerman, Geochemical processes: water and sediment environments. Wiley, 1979.
[93] W. J. Ullman and R. C. Aller, “Diffusion coefficients in nearshore marine sediments,”
Limnology and Oceanography, vol. 27, no. 3, pp. 552–556, 1982.
[94] B. P. Boudreau, “The diffusive tortuosity of fine-grained unlithified sediments,”
Geochimica et Cosmochimica Acta, vol. 60, no. 16, pp. 3139–3142, Aug. 1996.
[95] O. Coussy, Poromechanics. wiley, 2004.
[96] J. W. Amyx, D. M. Bass, and R. L. Whiting, Petroleum Reservoir Engineering:
Physical properties. McGraw-Hill, 1960.
[97] Jacquin, “Corrélation entre la perméabilité et les caractéristiques géométriques du grès
de Fontainebleau,” revue de l’institut français du pétrole, 1964.

132
[98] J. L. M. Poiseuille, “Recherches expérimentales sur le mouvement des liquides dans les
tubes de très-petits diamètres,” Mémoires présentés par divers savans à l’Académie des
sciences de l'Institut de France, vol. IX, 1846.
[99] J. Kozeny, Über kapillare Leitung des Wassers im Boden: (Aufstieg, Versickerung u.
Anwendung auf die Bewässerg) ; Gedr. mit Unterstützg aus d. Jerome u. Margaret
Stonborsugh-Fonds. Hölder-Pichler-Tempsky, A.-G. [Abt.:] Akad. d. Wiss., 1927.
[100] P. C. Carman, “Fluid flow through granular beds,” Transactions of the Institution of
Chemical Engineers, vol. 15, pp. 150–166, 1937.
[101] P. C. Carman, “Flow of Gases Through Porous Media.”
[102] P. Bouguer, Essai d’optique, sur la gradation de la lumière. 1729.
[103] F. Gassmann, Über die Elastizität poröser Medien. Kümmerly & Frey, 1951.
[104] P. Avseth, T. Mukerji, and G. Mavko, Quantitative Seismic Interpretation: Applying
Rock Physics Tools to Reduce Interpretation Risk. Cambridge University Press, 2005.
[105] M. A. Biot, “Theory of Propagation of Elastic Waves in a Fluid-Saturated Porous
Solid. I. Low-Frequency Range,” The Journal of the Acoustical Society of America,
vol. 28, no. 2, p. 168, 1956.
[106] M. A. Biot, “Theory of Propagation of Elastic Waves in a Fluid-Saturated Porous
Solid. II. Higher Frequency Range,” The Journal of the Acoustical Society of America,
vol. 28, no. 2, p. 179, 1956.
[107] M. A. Biot and D. G. Willis, “The Elastic Coefficients of the Theory of Consolidation,”
Journal of Applied Mechanics, vol. 24, pp. 594–601, 1957.
[108] D. L. Johnson, J. Koplik, and R. Dashen, “Theory of dynamic permeability and
tortuosity in fluid-saturated porous media,” Journal of Fluid Mechanics, vol. 176, no. -
1, p. 379, Apr. 1987.
[109] D. L. Johnson, T. J. Plona, and H. Kojima, “Probing porous media with first and
second sound . II . Acoustic properties of watersaturated porous media Probing porous
133
media with first and second sdund . II . Acoustic of water-saturated porous media,” vol.
115, no. 1994, 1997.
[110] M. E. Delany and E. N. Bazley, “Acoustical properties of fibrous absorbent materials,”
Applied Acoustics, vol. 3, no. 2, pp. 105–116, Apr. 1970.
[111] D. Lafarge, “Dynamic compressibility of air in porous structures at audible
frequencies,” The Journal of the Acoustical Society of America, vol. 102, no. 4, p.
1995, Oct. 1997.
[112] Y. Champoux and J.-F. Allard, “Dynamic tortuosity and bulk modulus in air-saturated
porous media,” Journal of Applied Physics, vol. 70, no. 4, p. 1975, 1991.
[113] S. Pride, F. Morgan, and A. Gangi, “Drag forces of porous-medium acoustics,”
Physical Review B, vol. 47, no. 9, pp. 4964–4978, Mar. 1993.
[114] J. G. Berryman, “Mixture Theories for Rock Properties,” in in Physics and Phase
Relations, A Handbook of Physical Constants, Am. Geophys, 1995, pp. 205–228.
[115] W. Voigt, Lehrbuch Der Kristallphysik. Johnson Reprint Corporation, 1928.
[116] A. Reuss, “Berechnung der Fließgrenze von Mischkristallen auf Grund der
Plastizitätsbedingung für Einkristalle .,” ZAMM - Zeitschrift für Angewandte
Mathematik und Mechanik, vol. 9, no. 1, pp. 49–58, 1929.
[117] Z. Hashin and S. Shtrikman, “Note on a variational approach to the theory of composite
elastic materials,” Journal of the Franklin Institute, vol. 271, no. 4, pp. 336–341, 1961.
[118] R. Hill, “The Elastic Behaviour of a Crystalline Aggregate,” Proceedings of the
Physical Society. Section A, vol. 65, no. 5, pp. 349–354, May 1952.
[119] W. F. Brace, “Some new measurements of linear compressibility of rocks,” Journal of
Geophysical Research, vol. 70, no. 2, pp. 391–398, Jan. 1965.
[120] G. T. Kuster and M. N. Toksöz, “Velocity and attenuation of seismic waves in two-
phases media : part I. theoretical formulations,” GEOPHYSICS, vol. 39, no. 5, pp. 587–
606, Oct. 1974.

134
[121] J. G. Berryman and B. Laboratories, “Long-wavelength Propagation in Composite
Elastic Media. I. Spherical Inclusions,” The Journal of the Acoustical Society of
AmericaJournal of the Acoustical Society of America, vol. 68, no. 6, pp. 1809–1819,
1980.
[122] D. A. G. Bruggeman, “Berechnung verschiedener physikalischer Konstanten von
heterogenen Substanzen. I. Dielektrizitätskonstanten und Leitfähigkeiten der
Mischkörper aus isotropen Substanzen,” Annalen der Physik, vol. 416, no. 7, pp. 636–
664, 1935.
[123] M. Cleary, S.-M. Lee, and I.-W. Chen, “Self-Consistent Techniques for Heterogeneous
Media,” Journal of the Engineering Mechanics Division, 1980.
[124] J. D. Eshelby, “The Determination of the Elastic Field of an Ellipsoidal Inclusion, and
Related Problems,” Proceedings of the Royal Society A: Mathematical, Physical and
Engineering Sciences, vol. 241, no. 1226, pp. 376–396, Aug. 1957.
[125] J. G. Berryman, “Long-wavelength propagation in composite elastic media II.
Ellipsoidal inclusions,” The Journal of the Acoustical Society of America, vol. 68, no.
6, p. 1820, 1980.
[126] R. J. Da Silva Camara Mauricio Da Fonseca and J. Attal, “Microcaractérisation
élastique de matériaux poreux par signature acoustique = Elastic microcharacterization
of porous materials by acoustic signature.” p. 100, 1995.
[127] P. Cervenka and P. Challande, “A new efficient algorithm to compute the exact
reflection and transmission factors for plane waves in layered absorbing media,” The
Journal of the Acoustical Society of America, 1991.
[128] F. T. Ulaby, Fundamentals of Applied Electromagnetics. Prentice Hall, 1997.
[129] E. Y. Lam and J. W. Goodman, “Iterative statistical approach to blind image
deconvolution,” Journal of the Optical Society of America A, vol. 17, no. 7, p. 1177,
2000.

135
[130] N. Wiener, “Extrapolation, interpolation, and smoothing of stationary time series. With
engineering applications.” 1966.
[131] R. Gold, “An iterative unfolding method for response matrices.,” Argonne, IL, Dec.
1964.
[132] P. H. Cittert, “Zum Einfluss der Spaltbreite auf die Intensitätsverteilung in
Spektrallinien. II,” Zeitschrift für Physik, vol. 69, no. 5–6, pp. 298–308, May 1931.
[133] G. Rudolph, “Convergence Analysis of Canonical Genetic Algorithms,” IEEE
Transactions on Neural Networks, vol. 5, pp. 96–101, 1994.
[134] J. H. Holland, Adaptation in Natural and Artificial Systems: An Introductory Analysis
with Applications to Biology, Control and Artificial Intelligence. Cambridge, MA,
USA: MIT Press, 1992.
[135] J. E. Baker, “Reducing bias and inefficiency in the selection algorithm,” in
Proceedings of the Second International Conference on Genetic Algorithms on Genetic
algorithms and their application, 1987, pp. 14–21.
[136] D. E. Goldberg, “Real-coded Genetic Algorithms, Virtual Alphabets, and Blocking,”
Complex Systems, vol. 5, pp. 139–167, 1990.
[137] D. E. Goldberg, Genetic algorithms in search, optimization, and machine learning.
Addison-Wesley, 1989.
[138] Z. Michalewicz, Genetic Algorithms + Data Structures + Evolution Programs.
London, UK, UK: Springer-Verlag, 1996.
[139] R. L. Haupt, “Optimum population size and mutation rate for a simple real genetic
algorithm that optimizes array factors,” in IEEE Antennas and Propagation Society
International Symposium. Transmitting Waves of Progress to the Next Millennium.
2000 Digest. Held in conjunction with: USNC/URSI National Radio Science Meeting
(Cat. No.00CH37118), vol. 2, pp. 1034–1037.

136
[140] S. E. Foss, P. Y. Y. Kan, and T. G. Finstad, “Single beam determination of porosity
and etch rate in situ during etching of porous silicon,” Journal of Applied Physics, vol.
97, no. 11, p. 114909, 2005.

Prénom NOM
TITRE de la thèse
Résumé
Résumé en anglais






























