



UNDER THE GUIDANCE OF
Dr. Pitam Singh
DEPARTMENT OF MATHEMATICS
Motilal Nehru National Institute of Technology
Allahabad, Uttar Pradesh -211004
Fuzzy sets were introduced by Lotfi A.Zadeh and Dieter Klaua
in 1965 as an extension of the classical notion of set.
In classical set theory, the
membership of elements in a set is
assessed in binary terms according to a
bivalent condition — an element either
belongs or does not belong to the set.
By contrast, fuzzy set theory permits the gradual assessment of the
membership of elements in a set; this is described with the aid of a
membership function valued in the real unit interval [0, 1].

In the modeling of real world phenomena, often some or
most of the pertinent information may be uncertain. For
example, the precise initial state may not be known or
information about various parameters required as a part of
the model may be imprecise. Many times, the nature of the
uncertainty involved may not be statistical. In such situations
involving uncertainties, Fuzzy deferential equations(FDEs) are
a natural way to model dynamical systems. Here, we are
interested in issues concerning Fuzzy Initial Value Problems
(FIVP).
Why we study??
Fuzzy Initial Value problem

Consider the initial value problem (IVP for
short) for the fuzzy differential equation
𝑢′ = 𝑓 𝑡, 𝑢 , 𝑢 𝑡0 = 𝑢0 ; 𝑡0 ≥ 0
Where 𝑓: 𝐽 × 𝐸𝑛 → 𝐸𝑛; 𝐽 = 𝑡0, 𝑡0 + 𝑎 , 𝑎 >0 and
𝐸𝑛, 𝑑 is a n-dimentional fuzzy metric space.
Let us first note that a mapping 𝑢: 𝐽 → 𝐸𝑛 is a
solution of the IVP

Let 𝑥, 𝑦 ∈ 𝐸. If there exists 𝑧 ∈ 𝐸 such that 𝑥 = 𝑦 + 𝑧 ; then 𝑧 is called the H-difference of x and y and it is denoted
by 𝑥 ⊖ 𝑦.
Here ⊖ sign stands always for H-difference and let us
remark that x⊖ y ≠ x + (−1)y. Usually we denote 𝑥 + (−)𝑦 by 𝑥 − 𝑦 ; while
𝑥 ⊖ 𝑦 stands for the H-difference.

Let 𝑓: (𝑎, 𝑏) → 𝐸 and 𝑥0 ∈ ,𝑎, 𝑏-.We say that 𝑓is strongly generalized
differentiable at 𝑥0 ,if there exit an element 𝑓′(𝑥0) ∈ 𝐸,such that
1) ∀ > 0 sufficiently small ,∃ 𝑓 𝑥0 + ⊖ 𝑓 𝑥0 , 𝑓 𝑥0 ⊖𝑓 𝑥0 − and the
limits (in (𝐸, 𝑑))
limℎ→0
𝑓 𝑥0 + ⊖ 𝑓 𝑥0
= limℎ→0
𝑓 𝑥0 ⊖𝑓 𝑥0 −
= 𝑓′(𝑥0)
2) ∀ > 0 sufficiently small ,∃ 𝑓 𝑥0 ⊖𝑓 𝑥0 + , 𝑓 𝑥0 − ⊖ 𝑓 𝑥0 and the
limits (in (𝐸, 𝑑))
limℎ→0
𝑓 𝑥0 ⊖𝑓 𝑥0 +
−= limℎ→0
𝑓 𝑥0 − ⊖ 𝑓 𝑥0−
= 𝑓′(𝑥0)
OR
OR
Let 𝑓: (𝑎, 𝑏) → 𝐸 and 𝑥0 ∈ ,𝑎, 𝑏-.We say that 𝑓is strongly generalized
differentiable at 𝑥0 ,if there exit an element 𝑓′(𝑥0) ∈ 𝐸,such that
Let 𝑓: (𝑎, 𝑏) → 𝐸 and 𝑥0 ∈ ,𝑎, 𝑏-.We say that 𝑓is strongly generalized
differentiable at 𝑥0 ,if there exit an element 𝑓′(𝑥0) ∈ 𝐸,such that
3) ∀ > 0 sufficiently small ,∃ 𝑓 𝑥0 + ⊖ 𝑓 𝑥0 , 𝑓 𝑥0 − ⊖ 𝑓 𝑥0 and the
limits (in (𝐸, 𝑑))
limℎ→0
𝑓 𝑥0 + ⊖ 𝑓 𝑥0
= limℎ→0
𝑓 𝑥0 − ⊖ 𝑓 𝑥0−
= 𝑓′(𝑥0)
4) ∀ > 0 sufficiently small ,∃ 𝑓 𝑥0 ⊖𝑓 𝑥0 + , 𝑓 𝑥0 − ⊖ 𝑓 𝑥0 and the
limits (in (𝐸, 𝑑))
limℎ→0
𝑓 𝑥0 ⊖𝑓 𝑥0 +
= limℎ→0
𝑓 𝑥0 ⊖𝑓 𝑥0 −
−= 𝑓′(𝑥0)
OR

A function that is strongly generalized
differentiable as in cases (i) and (ii) , will be referred
as (i)-differentiable or as (ii)-differentiable,
respectively.
As for cases (iii) and (iv), a function may be
differentiable as in (iii) or (iv) only on a discrete set
of points (where differentiability switches between
cases (i) and (ii)).

Theorem: If 𝒇 𝒕 = *𝒙 𝒕 , 𝒚 𝒕 , 𝒛(𝒕)+ is triangular number valued function,
then
a) If 𝒇 is (i)-differentiable (Hukuhara differentiable) then 𝒇′ = (𝒙′, 𝒚′, 𝒛′). b)If 𝒇 is (ii)-differentiable (Hukuhara differentiable) then 𝒇′= (𝒛′, 𝒚′, 𝒙′).
Proof:
The proof of (b) is as follows. Let us suppose that the H-difference exists.
Then, by direct computation we get
𝒍𝒊𝒎𝒉→𝟎
𝒇 𝒕 ⊖ 𝒇 𝒕 + 𝒉
−𝒉= 𝒍𝒊𝒎𝒉→𝟎
𝒙 𝒕 − 𝒙 𝒕 + 𝒉 , 𝒚 𝒕 − 𝒚 𝒕 + 𝒉 , 𝒛 𝒕 − 𝒛 𝒕 + 𝒉
−𝒉
= 𝒍𝒊𝒎𝒉→𝟎
𝒛 𝒕 −𝒛 𝒕 + 𝒉
−𝒉,𝒚 𝒕 −𝒚 𝒕+𝒉
−𝒉,𝒙 𝒕 −𝒙 𝒕 + 𝒉
−𝒉= (𝒛′, 𝒚′, 𝒙′)
Similarly, 𝒍𝒊𝒎𝒉→𝟎
𝒇 𝒕−𝒉 ⊖𝒇 𝒕
−𝒉= (𝒛′, 𝒚′, 𝒙′)

In the following equivalent crisp differential equations are considered
𝒖′ = −𝒖+ 𝝈 𝒕 , 𝒖′ − 𝝈 𝒕 = −𝒖 𝒂𝒏𝒅 𝒖′ + 𝒖 = 𝝈 𝒕 , 𝒖 𝟎 = 𝒖𝟎
When these equations are fuzzified we get three different
fuzzy differential equations and exhibit very different behaviors.
In this section, we begin with the inequivalent homogeneous
FIVPs, and then contrast their behavior with the behavior of the
solutions of the corresponding nonhomogeneous FDEs. In this
section we use exclusively the Hukuhara type differentiability.
We discuss the above problem with the help of
next examples
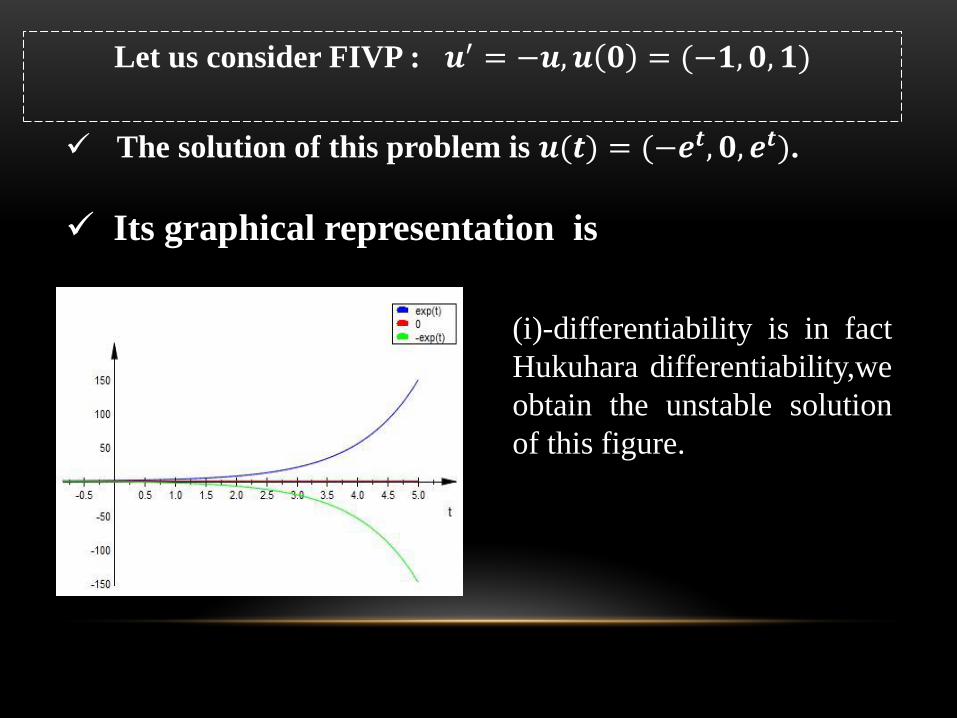
Let us consider FIVP : 𝒖′ = −𝒖, 𝒖 𝟎 = (−𝟏, 𝟎, 𝟏)
The solution of this problem is 𝒖(𝒕) = (−𝒆𝒕, 𝟎, 𝒆𝒕).
Its graphical representation is
(i)-differentiability is in fact
Hukuhara differentiability,we
obtain the unstable solution
of this figure.
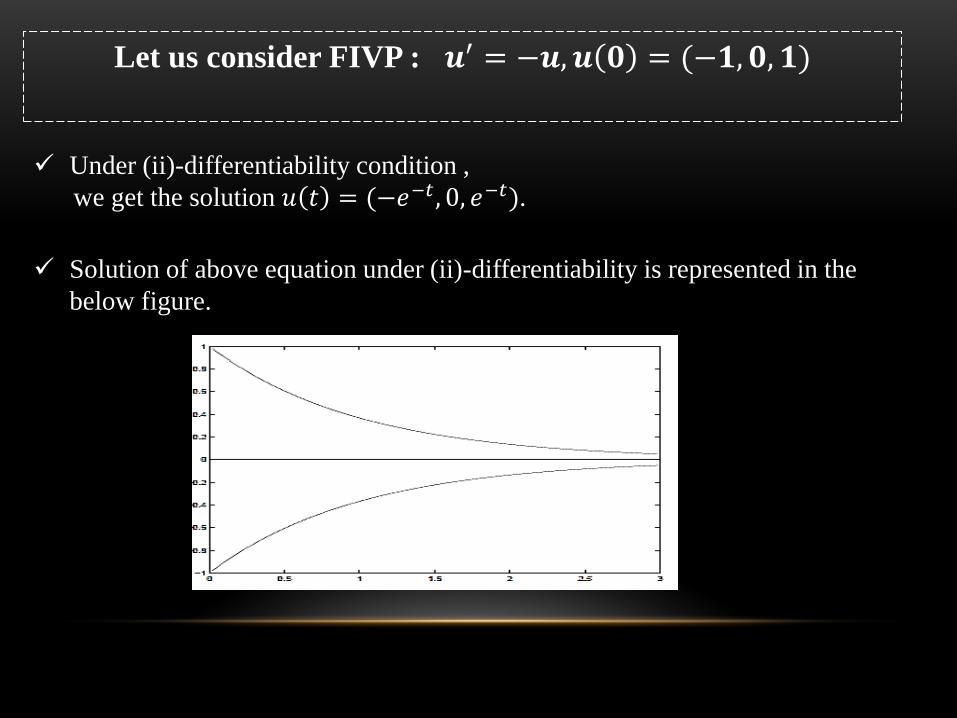
Let us consider FIVP : 𝒖′ = −𝒖, 𝒖 𝟎 = (−𝟏, 𝟎, 𝟏)
Under (ii)-differentiability condition ,
we get the solution 𝑢 𝑡 = (−𝑒−𝑡 , 0, 𝑒−𝑡).
Solution of above equation under (ii)-differentiability is represented in the
below figure.
Now, if we consider the corresponding equivalent
nonhomogeneous FIVP,
1) 𝒖′ + 𝒖 = 𝟐𝒆−𝒕 −𝟏, 𝟎, 𝟏 , 𝒖 𝟎 = (−𝟏, 𝟎, 𝟏)
2) 𝒖′ = −𝒖 + 𝟐𝒆−𝒕 −𝟏, 𝟎, 𝟏 , 𝒖 𝟎 = −𝟏, 𝟎, 𝟏
3) 𝒖′ − 𝟐𝒆−𝒕 −𝟏, 𝟎, 𝟏 = −𝒖, 𝒖 𝟎 = (−𝟏, 𝟎, 𝟏)

1st consider :
z
' 2 ; (0) 1 ' 0; (0) 0 ' 2 ; (0) 1
( ) (2 1)
2 1,0,1 , 0 1,0,
( ) 0 ( ) (2 1)
( ) [ ( ), ( ), ( )] [ (2 1) ,0, (2 1) ]
1t
t t
t t
t t
for x for y for
x x e x y y y z z e z
x t t e y t z t t e
u t x t y t z t t e
u u e
t
u
e
Its graphical representation is
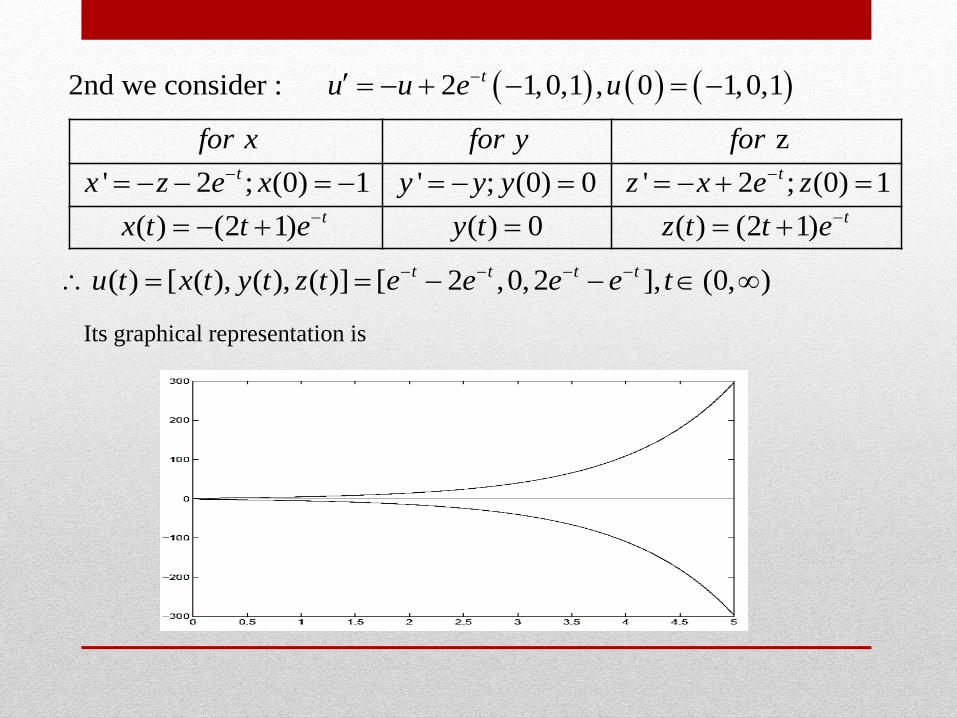
2nd we consider :
z
' 2 ; (0) 1 ' ; (0) 0 ' 2 ; (0) 1
( ) (2 1) ( ) 0 ( ) (2 1)
( ) [ ( ), ( ), ( )] [
2 1,0,1 , 0
2 ,0,
1,0
2 ], (0, )
,1
t t
t t
t t t t
t
for x for y for
x z e x y y y z x e z
x t t e y t z t t e
u t x t y t z t e e e e
u u u
t
e
Its graphical representation is
z
' 2 ; (0) 1 ' ;
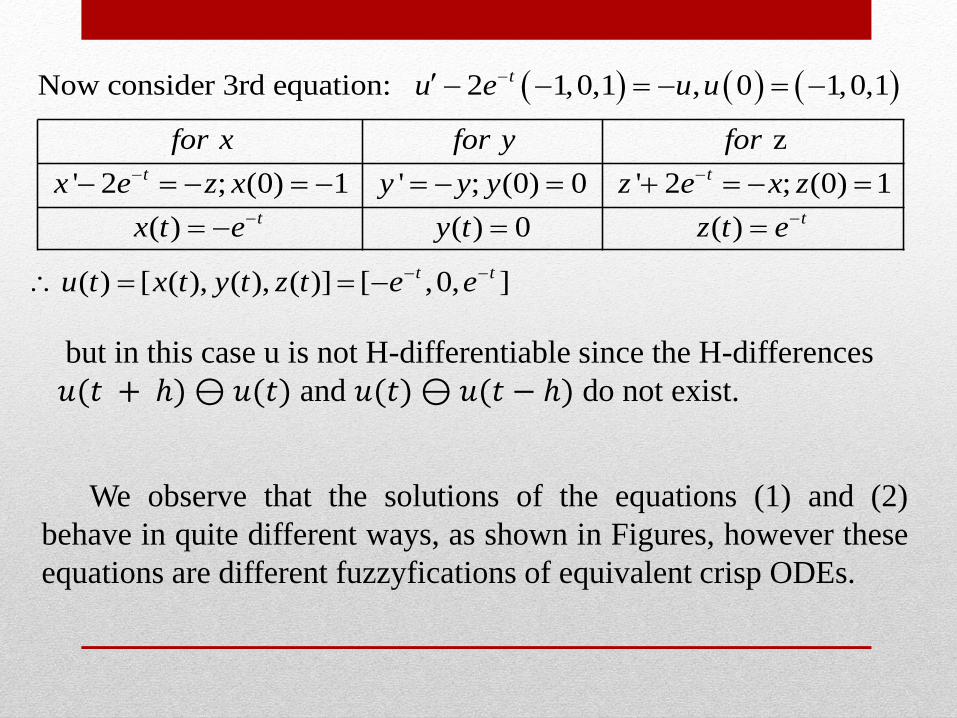
Now consider 3rd equati
(0) 0 ' 2 ; (0) 1
( ) ( ) 0 ( )
( ) [ ( ),
on:
( ), ( )] [ ,0,
2 1,0,1 , 0 1,0,1
]
t t
t t
t t
t
for x for y for
x e z x y y y
u e u u
z e x z
x t e y t z t e
u t x t y t z t e e
but in this case u is not H-differentiable since the H-differences
𝑢(𝑡 + ) ⊖ 𝑢(𝑡) and 𝑢(𝑡) ⊖ 𝑢(𝑡 − ) do not exist.
We observe that the solutions of the equations (1) and (2)
behave in quite different ways, as shown in Figures, however these
equations are different fuzzyfications of equivalent crisp ODEs.
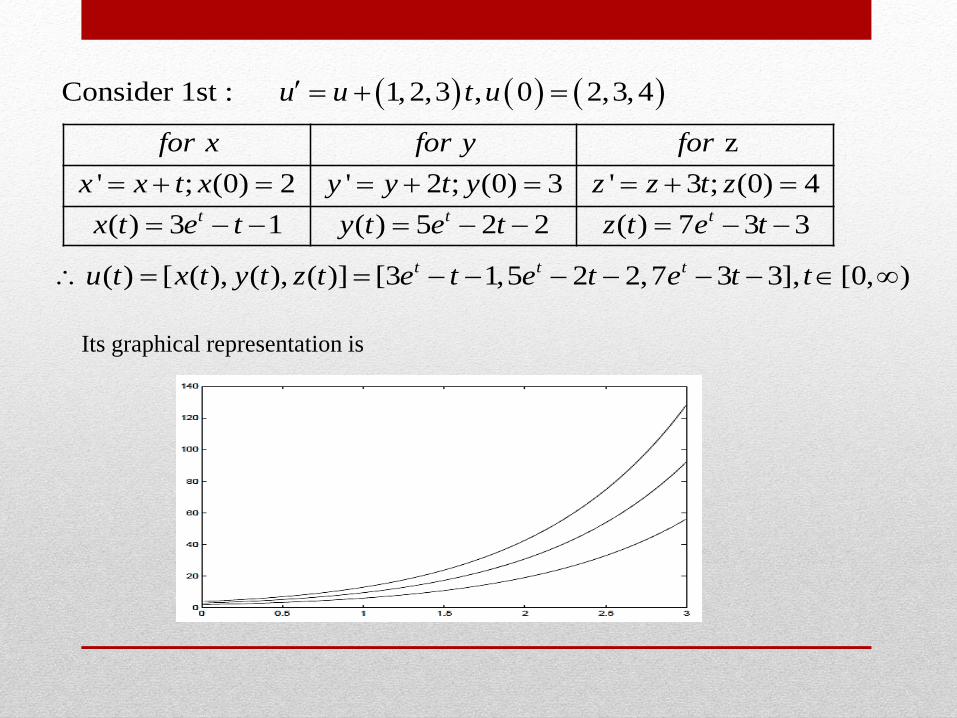
Now, Consider the initial value problems
1)𝒖′ = 𝒖 + (𝟏, 𝟐, 𝟑)𝒕, 𝒖 𝟎 = (𝟐, 𝟑, 𝟒)
2)𝒖′ + (−𝟏)(𝟏, 𝟐, 𝟑)𝒕 = 𝒖, 𝒖 𝟎 = (𝟐, 𝟑, 𝟒)
3) 𝒖′ − 𝒖 = (𝟏, 𝟐, 𝟑)𝒕, 𝒖 𝟎 = (𝟐, 𝟑, 𝟒)
z
' ; (0
Consi
) 2 ' 2 ; (0) 3 ' 3 ; (0) 4
( ) 3 1 ( ) 5 2 2 ( ) 7 3 3
( ) [ ( ), ( ), ( )] [3 1,5 2 2,7 3 3]
der 1st : 1, 2,3 , 0 2,3
,
4
, [0 )
,
t t t
t t t
for x for y for
x x t x y y t y z z t z
x t e t y t e t z t e t
u t x t y t z t e t e t e t
u t u
t
u
Its graphical representation is

z
' 3 ; (0) 2 ' 2 ; (0) 3 ' ; (0
Consider 2nd equat
) 4
( ) 5 3 3 ( ) 5 2 2 ( ) 5 1
( ) [ ( ), ( ), ( )] [3 1,5 2 2,7 3 3],
ion: 1 1,2,3 , 0 2,3,
[0,
4
)
t t t
t t t
for x for y for
x t x x y t y y z t z z
x t e t y t e t z t e t
u t x t y t z t e t e t e t t
u t u u
Its graphical representation is

z
' ; (0) 2 ' 2 ; (0) 3 ' 3 ; (0) 4
( ) 3.5 3 0
Consider 3rd equation: 1
.5 1 ( ) 5 2 2 ( ) 3.5 0.5
( ) [ ( )
, 2,3 ,
, ( ), ( )] [3.5 3 0.5
0 2,3
1,5
,4
t t t t t
t t t
for x for y for
x z t x y y t y z x t z
x t e t e y t e t z t e t e
u t x t y t z t e t e
u u t u
e
2 2,3.5 0.5 ], (ln 2, )t tt e t e t
Since this is not a solution near the origin we do not consider it a proper solution of
this problem.
∴ 𝑇𝑒 𝑔𝑟𝑎𝑝𝑖𝑐𝑎𝑙 𝑟𝑒𝑝𝑟𝑒𝑠𝑒𝑛𝑡𝑎𝑡𝑖𝑜𝑛 𝑜𝑓 𝑡𝑒 𝑠𝑜𝑙𝑢𝑡𝑖𝑜𝑛𝑠 𝑜𝑓 (1) 𝑎𝑛𝑑 (2) 𝑐𝑎𝑛 𝑏𝑒 𝑠𝑒𝑒𝑛
𝑖𝑛 𝑡𝑒 𝑎𝑏𝑜𝑣𝑒 𝑓𝑖𝑔𝑒𝑟 𝑟𝑒𝑠𝑝𝑒𝑐𝑡𝑖𝑣𝑒𝑙𝑦. 𝐴𝑔𝑎𝑖𝑛 𝑤𝑒 𝑎𝑣𝑒 𝑞𝑢𝑖𝑡𝑒 𝑑𝑖𝑓𝑓𝑒𝑟𝑒𝑛𝑡 𝑏𝑒𝑎𝑣𝑖𝑜𝑟. 𝐼𝑛𝑑𝑒𝑒𝑑, 𝑓𝑜𝑟 𝑡𝑒 𝑠𝑒𝑐𝑜𝑛𝑑 𝑠𝑜𝑙𝑢𝑡𝑖𝑜𝑛 𝑤𝑒 𝑐𝑜𝑢𝑙𝑑 𝑠𝑎𝑦 𝑡𝑎𝑡 𝑖𝑡 𝑖𝑠 "𝑟𝑒𝑙𝑎𝑡𝑖𝑣𝑒𝑙𝑦 𝑠𝑡𝑎𝑏𝑙𝑒", 𝑖. 𝑒. 𝑡𝑒
𝑢𝑛𝑐𝑒𝑟𝑡𝑎𝑖𝑛𝑡𝑦 𝑖𝑠 𝑞𝑢𝑖𝑡𝑒 𝑠𝑚𝑎𝑙𝑙 𝑤. 𝑟. 𝑡. 𝑡𝑒 𝑐𝑜𝑟𝑒 𝑓𝑜𝑟 𝑙𝑎𝑟𝑔𝑒 𝑣𝑎𝑙𝑢𝑒𝑠 𝑜𝑓 𝑡.
A PREY PREDATOR MODEL
WITH
FUZZY INITIAL VALUES
Consider the following prey-predator model with fuzzy initial
values. Before giving a solution of the fuzzy problem we want to
find its crisp solution.
𝑑𝑥
𝑑𝑡= 0.1𝑥 − 0.005𝑥𝑦
𝑑𝑦
𝑑𝑡= −0.4𝑦 + 0.008𝑥𝑦
with initial condition x 0 = 130 , 𝑦(0) = 40
where x(t) and y(t) are the number of preys and predators at time t, respectively.

Crisp solutions for the above problem are given in the
below Figure

Let the initial values be fuzzy i.e 𝑥 0 = 130 𝑎𝑛𝑑 𝑦 0 = 40
and let their 𝛼-level sets be as follows
𝑥(𝛼) = ,130 -𝛼= ,100 + 30𝛼, 160 − 30𝛼- 𝑦 𝛼 = ,40-𝛼= ,20 + 20𝛼, 60 − 20𝛼-
Let the 𝛼-level sets of 𝑥(𝑡, 𝛼) 𝑏𝑒 ,𝑥(𝑡, 𝛼)-𝛼= ,𝑢(𝑡, 𝛼), 𝑣(𝑡, 𝛼)-, and for simplicity denote them as ,𝑢, 𝑣- , similarly ,𝑦(𝑡, 𝛼)-𝛼=,𝑟(𝑡, 𝛼), 𝑠(𝑡, 𝛼)- = ,𝑟, 𝑠-. Then,
𝑢′, 𝑣′ = 0.1 𝑢, 𝑣 − 0.005 𝑢, 𝑣 . 𝑟, 𝑠
𝑟′, 𝑠′ = −0.4 𝑟, 𝑠 + 0.008 𝑢, 𝑣 . ,𝑟, 𝑠-

Hence for α= 0 the above initial value problem derives
If 𝑥(𝑡, 𝛼) and 𝑦(𝑡, 𝛼) are (i)-differentiable
then the above problem becomes
𝑢′ = 0.1𝑢 − 0.005vs 𝑣′ = 0.1𝑣 − 0.005𝑢𝑟 𝑟′ = −0.4𝑠 + 0.008𝑢𝑟 𝑠′ = −0.4𝑟 + 0.008𝑣𝑠
With 𝑢 0 = 100, 𝑣 0 = 160, 𝑟 0 = 20, 𝑠 0 = 60

Hence for α= 0 the above initial value problem derives
If 𝑥(𝑡, 𝛼) and 𝑦(𝑡, 𝛼) are (ii)-differentiable
then the above problem becomes
𝑣′ = 0.1𝑢 − 0.005vs 𝑢′ = 0.1𝑣 − 0.005𝑢𝑟 𝑠′ = −0.4𝑠 + 0.008𝑢𝑟 𝑟′ = −0.4𝑟 + 0.008𝑣𝑠
With 𝑢 0 = 100, 𝑣 0 = 160, 𝑟 0 = 20, 𝑠 0 = 60

Now for 𝜶 = 𝟎 the graphical solution of all possible cases are
given below
𝒙(𝒕, 𝜶) and 𝒚(𝒕, 𝜶) are (i)-differentiable
x(t,α) is (ii)-differentiable and y(t,α) is (i)-differentiable

Now if we analyze the above Figure, we
observe that when 𝑥(𝑡, 𝛼) and 𝑦(𝑡, 𝛼) are (ii)-
differentiable the graphical solution is
biologically meaningful
Furthermore the graphical solution is similar with the crisp solution.
when 𝑥(𝑡, 𝛼) and 𝑦(𝑡, 𝛼) are differentiable as (1,1), (1,2), (2,1)
the graphical solutions are incompatible with biological facts.

So we focus on the situation when 𝑥(𝑡, 𝛼) and 𝑦(𝑡, 𝛼) are (ii)-
differentiable. We give the crisp graphical solution and fuzzy
graphical solution when 𝑥(𝑡, 𝛼) and 𝑦(𝑡, 𝛼) are (ii)-differentiable on
the same graph for 𝛼 = 0 and 𝛼 ∈ ,0, 1-. The crisp solution and
fuzzy solution for 𝛼 = 0 are given in the below Figure.
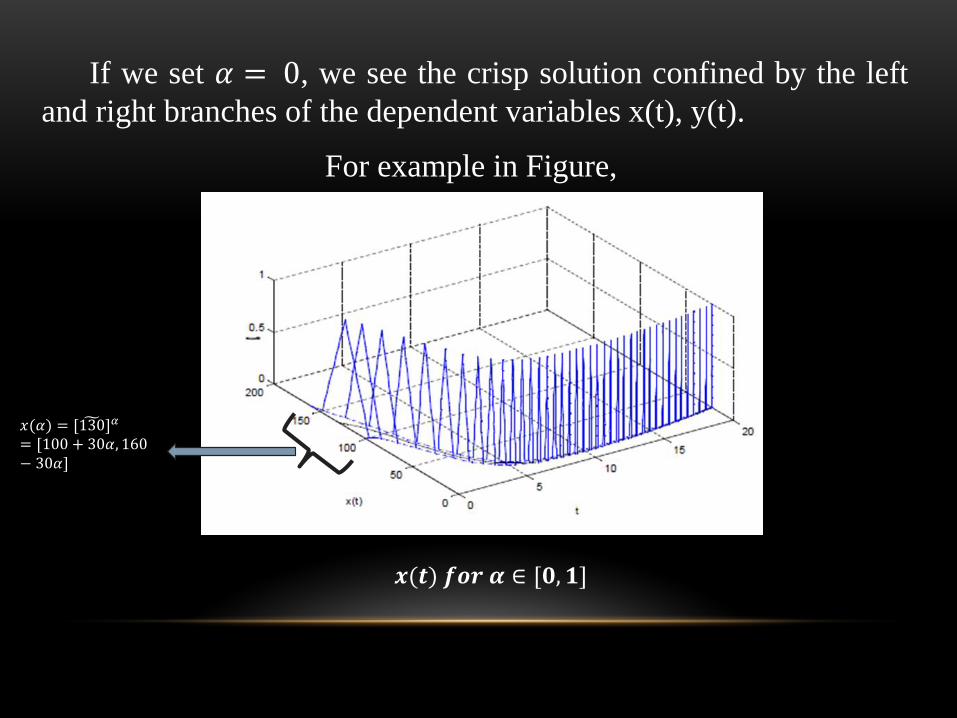
If we set 𝛼 = 0, we see the crisp solution confined by the left
and right branches of the dependent variables x(t), y(t).
For example in Figure,
𝒙(𝒕) 𝒇𝒐𝒓 𝜶 ∈ ,𝟎, 𝟏-
𝑥(𝛼) = ,130 -𝛼
= ,100 + 30𝛼, 160− 30𝛼-

Similarly for, 𝑦 𝑡 𝑓𝑜𝑟 𝛼 ∈ 0, 1

As we see in this example, the uniqueness of the
solution of a fuzzy initial value problem is lost when we
use the strongly generalized derivative concept. This
situation is looked on as a disadvantage. Researchers
can choose the best solution which better reflects the
behavior of the system under consideration, from
multiple solutions.

Surely, the multitude of solutions that are obtained is not really a
disadvantage, since from all the solutions we can find those which better
reflect the behavior of the system under study. This selection of the best
solution in our opinion can be made only from an accurate study of the
physical properties of the system which is studied. This makes it
necessary to study fuzzy differential equations as an independent
discipline, and exploring it further in different directions to facilitate its
use in modeling entirely different physical and engineering problems
satisfactorily. In this sense, the different approaches are complimentary
to each other.






























