




Festo Didactic
01/2011
Lernarrangements für den beruflichen
Unterricht bei Elektronikern
Ausbildungsunterlage
Robotino®

Stand: 01/2011
Autoren: Frank Motz, Alfred Riedl, Andreas Schelten
Lehrstuhl für Pädagogik, Technische Universität München,
Lothstraße 17, 80335 München
Layout: 01/2011
© Festo Didactic GmbH & Co. KG, 73770 Denkendorf, 2011
Internet: www.festo-didactic.com
E-Mail: [email protected]
Weitergabe sowie Vervielfältigung dieses Dokuments, Verwertung und Mitteilung seines Inhalts verboten,
soweit nicht ausdrücklich gestattet. Zuwiderhandlungen verpflichten zu Schadenersatz. Alle Rechte
vorbehalten, insbesondere das Recht, Patent-, Gebrauchsmuster- oder Geschmacksmusteranmeldungen
durchzuführen.
Hinweis
Die Verwendung nur einer Geschlechtsform soll keine geschlechtsspezifische Benachteiligung sein,
sondern dient nur der besseren Lesbarkeit und dem besseren Verständnis der Formulierungen.

© Festo Didactic GmbH & Co. KG III
Inhalt
Einleitung _____________________________________________________________________________ VII
Aufgaben und Lösungen
1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem ___________________________ 3
Aufgabe 1.1: Robotino® in der Kundenpräsentation ______________________________________________ 3
Aufgabe 1.2: Inbetriebnahme von Robotino® ____________________________________________________ 8
Aufgabe 1.3: Erweiterung von Robotino® mit einem Diagnosesystem ______________________________ 11
Aufgabe 1.3.1: Schaltplanarten _____________________________________________________________ 12
Aufgabe 1.4: Programmierung eines Startchecks ______________________________________________ 17
Teilaufgabe 1.4.1: Sicherheits-Check - Die UND-Verknüpfung (AND) ___________________________ 17
Teilaufgabe 1.4.2: Power-Check - Die ODER-Verknüpfung (OR) ________________________________ 20
Teilaufgabe 1.4.3: Ready-Check - Die NICHT-Verknüpfung (NOT) ______________________________ 22
Aufgabe 1.5: Erweiterung des Power-Checks – Das RS-Speicherglied ______________________________ 24
Aufgabe 1.6: Transport von Werkstücken mit Robotino® ________________________________________ 28
Teilaufgabe 1.6.1: Lineare Fahrt mit Robotino® ____________________________________________ 29
Teilaufgabe 1.6.2:Kollisionsschutz ______________________________________________________ 33
Teilaufgabe 1.6.3: Vorwärtsfahrt mit Hilfe des Omniantriebs _________________________________ 37
Teilaufgabe 1.6.4: Stoppen an der schwarzen Linie _________________________________________ 40
Teilaufgabe 1.6.5: Seitwärtsfahrt bis zur Ausrichtung vor dem Magazin ________________________ 46
Teilaufgabe 1.6.6: Vorwärtsfahrt zur Endposition im Magazin _________________________________ 48
Teilaufgabe 1.6.7: Erkennen und Greifen des Werkstücks ____________________________________ 51
Teilaufgabe 1.6.8: Rückwärtsfahrt bis zu einer induktiven Markierung __________________________ 52
Teilaufgabe 1.6.9: Seitwärtsfahrt bis zum nächsten Magazin _________________________________ 57
Teilaufgabe 1.6.10: Vorwärtsfahrt zur Endposition im Magazin________________________________ 58
Teilaufgabe 1.6.11: Werkstück durch Öffnen des Greifers freigeben ___________________________ 59
2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS ____________________________ 63
Aufgabe 2.1: Steuerung analysieren und anpassen _____________________________________________ 63
Aufgabe 2.2: Einschalten der Mischanlage mit einem Taster _____________________________________ 71
Aufgabe 2.3: Kommunikation der SPS mit Robotino® ___________________________________________ 73
Teilaufgabe 2.3.1: Spannungsüberwachung _______________________________________________ 74
Teilaufgabe 2.3.2: Warnblinker _________________________________________________________ 77
Aufgabe 2.4: Programmieren einer Ablaufsteuerung ____________________________________________ 79
Aufgabe 2.5: Mischanlage programmieren und in Betrieb nehmen ________________________________ 83
Aufgabe 2.6: Farberkennung der Paletten ____________________________________________________ 90
Musterlösung SPS _______________________________________________________________________ 92
Musterlösung Symboltabelle_______________________________________________________________ 94

Inhalt
IV © Festo Didactic GmbH & Co. KG
Aufgaben und Arbeitsblätter
3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem ___________________________ 3
Aufgabe 1.1: Robotino® in der Kundenpräsentation ______________________________________________ 3
Aufgabe 1.2: Inbetriebnahme von Robotino® ____________________________________________________ 8
Aufgabe 1.3: Erweiterung von Robotino® mit einem Diagnosesystem ______________________________ 11
Aufgabe 1.3.1: Schaltplanarten _____________________________________________________________ 12
Aufgabe 1.4: Programmierung eines Startchecks ______________________________________________ 17
Teilaufgabe 1.4.1: Sicherheits-Check - Die UND-Verknüpfung (AND) ___________________________ 17
Teilaufgabe 1.4.2: Power-Check - Die ODER-Verknüpfung (OR) ________________________________ 20
Teilaufgabe 1.4.3: Ready-Check - Die NICHT-Verknüpfung (NOT) ______________________________ 22
Aufgabe 1.5: Erweiterung des Power-Checks – Das RS-Speicherglied ______________________________ 24
Aufgabe 1.6: Transport von Werkstücken mit Robotino® ________________________________________ 28
Teilaufgabe 1.6.1: Lineare Fahrt mit Robotino® ____________________________________________ 29
Teilaufgabe 1.6.2:Kollisionsschutz ______________________________________________________ 33
Teilaufgabe 1.6.3: Vorwärtsfahrt mit Hilfe des Omniantriebs _________________________________ 37
Teilaufgabe 1.6.4: Stoppen an der schwarzen Linie _________________________________________ 40
Teilaufgabe 1.6.5: Seitwärtsfahrt bis zur Ausrichtung vor dem Magazin ________________________ 46
Teilaufgabe 1.6.6: Vorwärtsfahrt zur Endposition im Magazin _________________________________ 48
Teilaufgabe 1.6.7: Erkennen und Greifen des Werkstücks ____________________________________ 51
Teilaufgabe 1.6.8: Rückwärtsfahrt bis zu einer induktiven Markierung __________________________ 52
Teilaufgabe 1.6.9: Seitwärtsfahrt bis zum nächsten Magazin _________________________________ 57
Teilaufgabe 1.6.10: Vorwärtsfahrt zur Endposition im Magazin________________________________ 58
Teilaufgabe 1.6.11: Werkstück durch Öffnen des Greifers freigeben ___________________________ 59
4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS ____________________________ 63
Aufgabe 2.1: Steuerung analysieren und anpassen _____________________________________________ 63
Aufgabe 2.2: Einschalten der Mischanlage mit einem Taster _____________________________________ 71
Aufgabe 2.3: Kommunikation der SPS mit Robotino® ___________________________________________ 73
Teilaufgabe 2.3.1: Spannungsüberwachung _______________________________________________ 74
Teilaufgabe 2.3.2: Warnblinker _________________________________________________________ 77
Aufgabe 2.4: Programmieren einer Ablaufsteuerung ____________________________________________ 79
Aufgabe 2.5: Mischanlage programmieren und in Betrieb nehmen ________________________________ 83
Aufgabe 2.6: Farberkennung der Paletten ____________________________________________________ 90

Inhalt
© Festo Didactic GmbH & Co. KG V
5 Aufbau und Funktion des Gesamtsystems _____________________________________________ I-1
5.1 Robotino® _______________________________________________________________________ I-1
5.2 Speicherprogrammierbare Steuerung (SPS) ____________________________________________ I-4
5.3 Mobile Arbeitsplattform ____________________________________________________________ I-5
5.4 Unterlagen/Lernsoftware ___________________________________________________________ I-6
5.5 Zuordnung der Lernsituationen zu den Projektaufgaben __________________________________ I-7
6 Einsatz der ausgearbeiteten Lernarrangements im Unterricht ____________________________ I-9
6.1 Mögliche Einsatzbereiche der Lernarrangements bei Elektronikern _________________________ I-9
6.2 Organisation des Unterrichts _______________________________________________________ I-15
6.3 Erprobung der Lernarrangements an der Berufsschule Pfaffenhofen _______________________ I-16
6.3.1 Einführung in die Thematik der mobilen Robotik _______________________________________ I-16
6.3.2 Einsatz des Lernarrangements 1 im Unterricht _________________________________________ I-18
6.3.3 Einsatz des Lernarrangements 2 im Unterricht _________________________________________ I-20
7 Das Lernpotenzial von Robotino® für eine moderne berufliche Bildung ____________________ I-26
7.1 Zielvorstellungen einer modernen beruflichen Bildung __________________________________ I-26
7.2 Das Lernsystem Robotino® als Bestandteil einer modernen beruflichen Bildung _____________ I-26
7.3 Fazit ___________________________________________________________________________ I-28
8 Zusammenfassung _______________________________________________________________ I-29

Inhalt
VI © Festo Didactic GmbH & Co. KG

© Festo Didactic GmbH & Co. KG VII
Einleitung
Automatisierung breitet sich sowohl in der Industrie als auch in privaten Haushalten stark aus. Die Aufgaben
von Facharbeitern in der Automatisierungstechnik sind somit in den letzten Jahren erheblich umfangreicher
geworden und durch eine zunehmende Komplexität gekennzeichnet. Dem muss eine zeitgemäße berufliche
Bildung Rechnung tragen.
Die Rahmenlehrpläne der Kultusministerkonferenz der Länder in der Bundesrepublik Deutschland
orientieren sich an typischen beruflichen Aufgabenbereichen, sogenannten Handlungsfeldern. Diese geben
die Struktur der Lernfelder in den Rahmenlehrplänen und den daraus abgeleiteten Lehrplanrichtlinien der
einzelnen Bundesländer vor. Lernfelder sind somit für den Unterricht aufbereitete, komplexe berufliche
Handlungsfelder. Die Lehrplanintentionen erfordern eine Umsetzung im Unterricht, bei der das Konzept der
Handlungsorientierung leitend ist.
Handlungsorientiertes Lernen in der beruflichen Bildung ist von zwei zentralen Determinanten getragen.
Eine wichtige Einflussgröße ist das professionelle Selbstlernmaterial, das einen aktiven Wissenserwerb und
ein individualisiertes Lernen ermöglicht (z.B. Lern- und Arbeitsgegenstände, Leittexte, schriftliche
Arbeitsanweisungen, Informationsmaterialien, etc.). Die zweite wichtige Einflussgröße ist die Lehrkraft, die
als fachlicher Experte das individualisierte Lernen begleitet. Der Unterricht erfordert dafür Lernsituationen,
in denen Lernende die Rolle aktiv Handelnder übernehmen können und in konkreten Handlungssituationen
Wissen selbstständig konstruieren.
Die sehr offen formulierten Lernfelder erfordern eine curriculare Arbeit der Schulen einschließlich der
Lehrkräfte, die in einer fachlichen Domäne unterrichten. Für die konkrete Ausgestaltung der Lernsituationen
sollen komplexe, berufstypische Aufgaben und Situationen leitend sein, an denen sich Inhalte beruflicher
Handlungsfelder den Lernenden exemplarisch erschließen.
Das Lernsystem Robotino® liefert mit den hier dargestellten Lernsituationen konkrete Umsetzungsbeispiele,
die berufliche Handlungsfelder und berufstypische Handlungssituationen aus der Automatisierungstechnik
exemplarisch repräsentieren. Sie, oder auch einzelne Teile der dargestellten Lernsituationen können in einer
Vielzahl von Lernfeldern in unterschiedlichen Berufen zum Einsatz kommen.

VIII © Festo Didactic GmbH & Co. KG

© Festo Didactic GmbH & Co. KG 1
Robotino® als fahrerloses Transportsystem in einem Lager
Aufgaben und Lösungen
Lernarrangement 1 – Steuerungen analysieren und anpassen

2 © Festo Didactic GmbH & Co. KG

© Festo Didactic GmbH & Co. KG 3
1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem,
Aufgaben und Lösungen
Aufgabe 1.1
Robotino® in der Kundenpräsentation
Ein Kunde Ihrer Firma benötigt ein System zum Transport von Werkstücken im Lager und möchte hierzu
Robotino® als fahrerloses Transportsystem einsetzen. Bevor er sich jedoch für das System entscheidet,
möchte er von Ihnen eine kurze Präsentation des Systems bezüglich seiner Komponenten und deren
Funktion haben.
– Informieren Sie sich über Aufbau und Funktion von Robotino®!
Damit die Präsentation von Robotino® gut und reibungslos verläuft, sollen Sie die wichtigsten Komponenten
des Systems dokumentieren. Dabei ist jedoch folgendes zu beachten:
In Dokumentationen, Schaltungsunterlagen und elektrischen Anlagen müssen Betriebsmittel eindeutig
gekennzeichnet sein, deshalb werden diese alphanumerisch, d. h. mit Buchstaben und Zahlen bezeichnet.
Der Kennbuchstabe gibt Aufschluss über die Art der Betriebsmittel, z. B. M für Motoren oder P für
Meldeleuchten. Mehrere gleichartige Betriebsmittel haben eine fortlaufende Zählnummer, die dem
Kennbuchstaben nachgestellt ist, z. B. P1, P2 …
– Wo finden Sie die benötigten Informationen über die normgerechte Kennzeichnung von Betriebsmitteln?
Informationen über Betriebsmittelkennzeichnung findet man im Fach- oder Tabellenbuch.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
4 © Festo Didactic GmbH & Co. KG
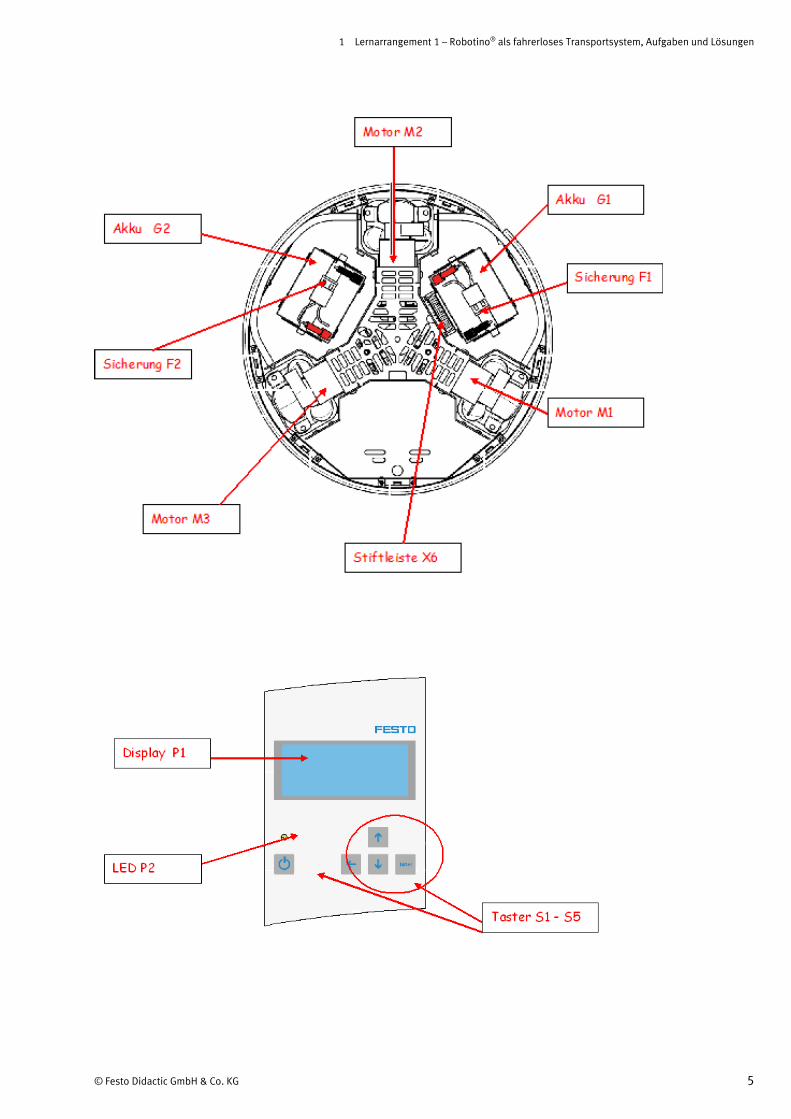
– Geben Sie mit Hilfe der Robotino®-Unterlagen und Ihrem Tabellenbuch die gekennzeichneten
Betriebsmittel an und vergeben Sie hierfür den richtigen Kennbuchstaben mit Zählnummer.
1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 5

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
6 © Festo Didactic GmbH & Co. KG
Damit Sie für die Präsentation fachlich gut vorbereitet sind, beantworten Sie bitte noch die folgenden
Fragen:
– Wie erfolgt die Energieversorgung von Robotino®
Die Energieversorgung erfolgt durch zwei aufladbare 12V-Akkus mit 4 Ah.
– Wie wird Robotino® angetrieben?
Robotino® wird durch drei Antriebseinheiten angetrieben. Jede dieser Einheiten besteht aus einem
Gleichstrommotor, Getriebe mit einer Übersetzung von 16:1, Allseitenrolle, Zahnriemen und
Inkrementalgeber.
– Welche Funktion hat die Folientastatur und das Display?
Mit der Folientastatur können unterschiedliche Optionen eingestellt oder mitgelieferte Programme
aufgerufen werden. Das Display dient zur Anzeige von Informationen wie z.B. IP-Adresse oder
Software Version.
– Welche Sensoren sind bei Robotino® integriert?
Im Robotino® sind Sensoren für die Messung des Abstandes von Objekten (Infrarotsensoren), der
Geschwindigkeit der Motoren (Inkrementalgeber) und ein Kollisionsschutzsensor integriert.
– Welche Funktion hat das Kamerasystem von Robotino®?
Die Kamera ermöglicht es, mit Hilfe von Robotino® View Live-Bilder anzuzeigen. Des Weiteren kann die
Kamera zur Lokalisierung von Objekten und zur Bahnverfolgung eingesetzt werden.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 7
Alleine mit Fachwissen wird eine Präsentation noch nicht überzeugend und gut.
– Was muss ein Referent bei seiner Präsentation noch beachten, damit sein Vortrag ein Erfolg wird?
• klare Struktur und Gliederung
• angemessener Medieneinsatz
• Fachbegriffe erklären
• Blickkontakt mit Publikum
• deutlich und frei sprechen
• Sprechpausen einhalten
• Körpersprache (Gestik, Mimik) einsetzen
• usw.
– Präsentieren Sie dem Kunden (Teamkollegen) das Robotino® System und beantworten Sie ihm seine
Fragen!
Konnten alle Fragen zur Zufriedenheit des Kunden beantwortet werden?
Wurden die richtigen Fachbegriffe verwendet?
Wurden die Fachbegriffe erklärt?
Bestand Blickkontakt zum Zuhörer?
War die Präsentation überzeugend?
– Was hätte man bei der Präsentation besser machen können?
1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
8 © Festo Didactic GmbH & Co. KG
Aufgabe 1.2
Inbetriebnahme von Robotino®
Robotino® ist ein autonomes, mobiles Robotersystem, welches durch seine Steuereinheit, sowie den
Sensoren und Aktoren seine Intelligenz erhält. Er arbeitet, wie jede elektrische Steuerung, nach dem sog.
EVA-Prinzip.
– Informieren Sie sich in Ihrem Fachbuch über das EVA-Prinzip.
– Geben Sie an, wofür die Abkürzung EVA steht und beschreiben Sie kurz mit eigenen Worten die
Bedeutung!
E: Eingabe
Eingangssignale wie z.B. von Sensoren oder Bedienelementen werden hier für die Weiterverarbeitung
aufgenommen.
V: Verarbeitung
Die Eingangssignale werden hier entsprechend der Aufgabe verarbeitet.
A: Ausgabe
Die Verarbeitungsergebnisse werden an Aktoren ausgegeben.
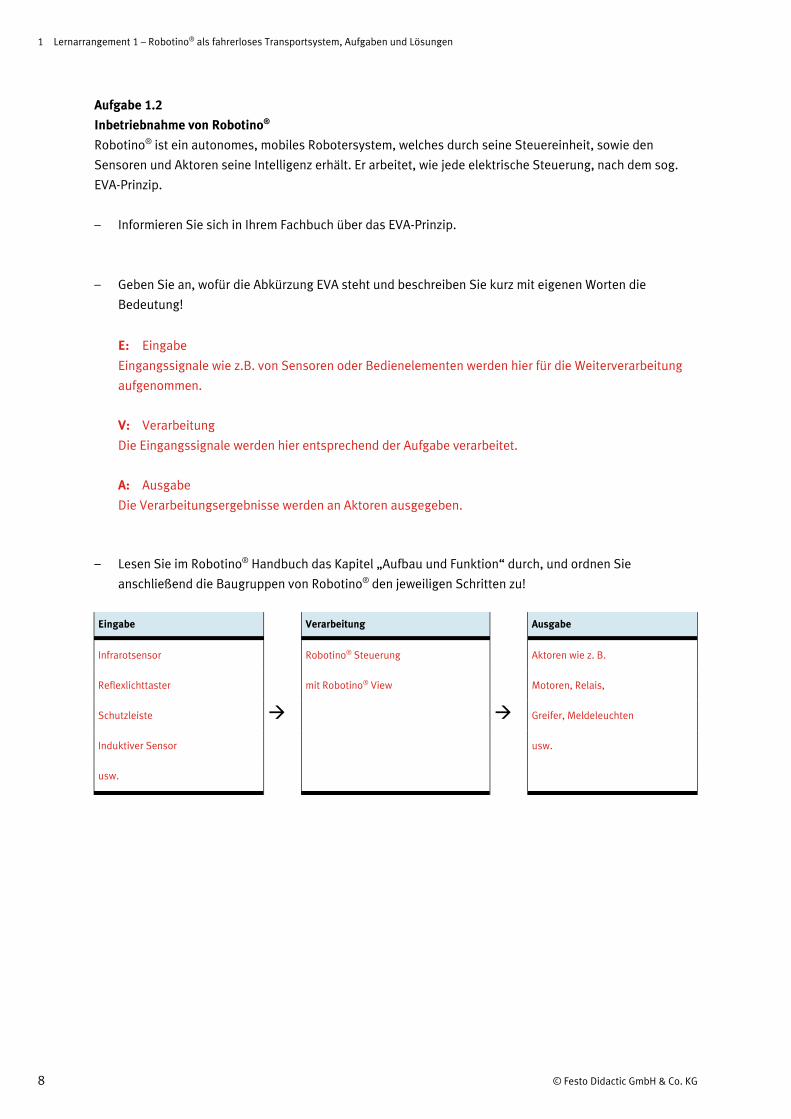
– Lesen Sie im Robotino® Handbuch das Kapitel „Aufbau und Funktion“ durch, und ordnen Sie
anschließend die Baugruppen von Robotino® den jeweiligen Schritten zu!
Eingabe Verarbeitung Ausgabe
Infrarotsensor Robotino® Steuerung Aktoren wie z. B.
Reflexlichttaster mit Robotino® View Motoren, Relais,
Schutzleiste Greifer, Meldeleuchten
Induktiver Sensor usw.
usw.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 9
Überlegen Sie, welche weiteren Sensoren und Aktoren an Robotino® angeschlossen werden können und
tragen Sie diese in die obige Übersicht mit ein.
Robotino® kann sowohl Steuerungsaufgaben als auch Regelungsaufgaben übernehmen. Informieren Sie
sich mit Hilfe Ihres Fachbuches und den Robotino®-Unterlagen (Teil B-Theorie) über die Begriffe „Steuern“
und „Regeln“.
– Ergänzen Sie die Blockschaltbilder!
Blockschaltbild einer Steuerung
– Wo finden Sie das EVA-Prinzip im oben dargestellten Blockschaltbild wieder?
Das EVA-Prinzip ist in der Steuereinrichtung wiederzufinden.
– Erläutern Sie am Beispiel des Robotino®-Antriebs die Begriffe Steuereinrichtung, Steuerstrecke,
Steuergröße und Störgröße.
Steuereinrichtung:
Ansteuern des Robotino®-Antriebs über Robotino® View
Steuerstrecke:
Antriebsmotoren von Robotino®.
Steuergröße:
Drehzahl der Antriebsmotoren
Störgröße:
Auf Robotino® wirken von außen Störgrößen ein. Diese können z. B. sein:
• Durchdrehen des Antriebs auf glattem Untergrund.
• Kollision des Roboters mit einem Gegenstand.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
10 © Festo Didactic GmbH & Co. KG
Blockschaltbild einer Regelung
– Beschreiben Sie in eigenen Worten den wesentlichen Unterschied zwischen einer Steuerung und einer
Regelung!
Bei einer Regelung wird die Regelgröße fortlaufend mit der Führungsgröße verglichen.
Regelungen haben eine geschlossene Wirkungskette.
Bei einer Steuerung wird die Wirkung der Störgrößen nicht korrigiert. Steuerungen haben einen
offenen Wirkungsweg.
– Starten Sie das Demoprogramm „Vorwärts“ und beschreiben Sie das Fahrverhalten von Robotino®.
Robotino® fährt geradeaus und stoppt nach einer Zeit von 10 Sekunden automatisch.
– Stellen Sie nun ein Hindernis (z.B. Systainer) in den Fahrweg von Robotino®, und beobachten Sie das
Verhalten.
Robotino® fährt gegen das Hindernis und bleibt stehen.
– Handelt es sich bei dem Demoprogramm „Vorwärts“ um eine Steuerung oder um eine Regelung?
Begründen Sie Ihre Antwort!
Beim Programm „Vorwärts“ handelt es sich um eine Steuerung, da die Wirkung der Störgrößen
(Hindernis) nicht korrigiert wird.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 11
Aufgabe 1.3
Erweiterung von Robotino® mit einem Diagnosesystem
Für Robotino® soll eine Erweiterungsschaltung gebaut werden, welche als Diagnosesystem dient. Dieses
Diagnosesystem wird von einem Robotino®-Programm angesteuert (Startcheck). Es hilft, kritische Zustände
zu erkennen und erforderliche Eingaben zu machen.
Die Erweiterung soll einen Schlüsselschalter zum Einschalten von Robotino® und drei Kontrollleuchten (je
einmal rot, gelb, grün) zum Anzeigen der Betriebszustände besitzen sowie einen Taster der nach einem
Not-Halt zum Wiedereinschalten des Roboters dient. Des Weiteren sollen die Betriebsmittel in einem
Gehäuse untergebracht sein, welches gut auf Robotino® zu integrieren ist.
Der Anschluss des Diagnosesystems erfolgt über die E/A-Schnittstelle. An dieser können zusätzliche
Sensoren und Aktoren angeschlossen werden.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
12 © Festo Didactic GmbH & Co. KG
– Welche Anschlussmöglichkeiten bietet die E/A-Schnittstelle?
8 analoge Eingänge
8 digitale Eingänge
8 digitale Ausgänge
2 Relais
Spannungsversorgung + 24 V
Ground (Masse)
Schaltpläne helfen dem Elektroniker beim Aufbau von Schaltungen und bei der Fehlersuche in Schaltungen.
Damit Sie Schaltpläne richtig zeichnen und lesen können, sollen Sie sich mit den verschiedenen
Darstellungsarten und Normen vertraut machen.
Teilaufgabe 1.3.1
Schaltplanarten
Schaltpläne kann man in zwei Gruppen einteilen:
Die einpolige Darstellung
Hier werden alle Leitungen durch eine Volllinie dargestellt. Somit ist diese Art von Schaltplänen zwar
übersichtlich, jedoch ist die Funktion der Schaltung dabei nicht ersichtlich.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 13
Die allpolige Darstellung
Hier wird jeder Leiter einzeln gezeichnet. Dadurch ist die Funktion der Schaltung ersichtlich, jedoch kann
eine komplexe Schaltung sehr schnell unübersichtlich werden.
– Ergänzen Sie die Übersicht mit Beispielen von Schaltplänen

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
14 © Festo Didactic GmbH & Co. KG
Finden Sie mit Hilfe Ihrer Fachbücher und den Robotino®-Unterlagen die Schaltzeichen der folgenden
Betriebsmittel mit den entsprechenden Kennzeichnungen heraus und zeichnen Sie diese normgerecht!
– Beschreiben Sie mit eigenen Worten deren Funktion genauer!
Meldeleuchte:
Sie zeigt den Betriebszustand von Robotino® an. Die grüne Meldeleuchte
signalisiert, dass alles in Ordnung ist. Gelb zeigt einen anormalen Zustand an
und rot signalisiert einen Notfall.
Drucktaster für Freigabe:
Gibt nach einem Gefahrenfall die Anlage nach Betätigung wieder frei.
Schlüsselschalter:
Schaltet mit Hilfe eines Schlüssels die Anlage ein (Schalterstellung 1) oder aus
(Schalterstellung 0).

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 15
– Überlegen Sie sich, wo die drei Meldeleuchten, der Schlüsselschalter und der Freigabetaster am
Robotino® angeschlossen werden müssen, und ergänzen Sie den Anschlussplan mit den benötigten
Betriebsmitteln.
– Welche Werkzeuge benötigen Sie für die Erweiterung?
Lötkolben, Bohrmaschine, Gabelschlüssel, Abisolierzange, Seitenschneider, Presszange für
Aderendhülsen, Schraubenzieher

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
16 © Festo Didactic GmbH & Co. KG
– Erstellen Sie eine Materialliste für die Erweiterung und kalkulieren Sie mit Hilfe von einschlägigen
Anbietern die Materialkosten.
Material
1 Schlüsselschalter
1 Drucktaster
1 Kontrolllampe grün; 24 V
1 Kontrolllampe gelb; 24 V
1 Kontrolllampe rot; 24 V
1 Gehäuse; 80x80x55 mm mit Befestigungsmaterial
Lötzinn
Steuerleitung
Aderendhülsen
– Fertigen Sie die Erweiterungsschaltung an!
Bevor Sie die Erweiterungsschaltung an Robotino® anschließen, überprüfen Sie
die Funktion des Schlüsselschalters und des Tasters mit einem Durchgangsprüfer.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 17
Aufgabe 1.4
Programmierung eines Startchecks
Für die Diagnosebox von Robotino® soll ein Startcheck programmiert werden, d.h. nur wenn keine Störung
am Robotino® vorliegt, soll er seine Fahrt beginnen.
Damit Sie die folgenden Aufgaben lösen können, müssen Sie sich über die logischen Grundfunktionen
informieren. Es gibt drei Grundverknüpfungen mit denen man jede beliebige Steueraufgabe lösen kann.
– Nennen Sie die drei logischen Grundverknüpfungen!
Die drei logischen Grundverknüpfungen sind die
• UND-Funktion,
• ODER-Funktion und die
• NICHT-Funktion.
Teilaufgabe 1.4.1
Sicherheits-Check – Die UND-Verknüpfung (AND)
Beim Startcheck soll eine rote Kontrolllampe leuchten, wenn der Freigabetaster und die Stoßleiste betätigt
sind.
– Zeichnen Sie den Stromlaufplan der UND-Verknüpfung und ergänzen Sie die Wertetabelle sowie das
Zeitablaufdiagramm!

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
18 © Festo Didactic GmbH & Co. KG
In Funktionsplänen, wie sie z.B. in Robotino® View verwendet werden, wird das sog. Logiksymbol nach
ISO-Darstellung verwendet.
– Zeichnen Sie das Logiksymbol der UND-Verknüpfung normgerecht!
– Eine weitere Möglichkeit, logische Funktionen darzustellen, ist die Beschreibung mit Hilfe einer
Gleichung. Schreiben Sie die Gleichung der UND-Verknüpfung neben dem Logiksymbol auf!
– Bauen Sie die Schaltung mit Robotino® View auf, und führen Sie einen Test der Schaltung durch.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 19
– Erfüllt die Schaltung die geforderte Funktion, dann dokumentieren Sie die Lösung für Ihre Unterlagen.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
20 © Festo Didactic GmbH & Co. KG
Teilaufgabe 1.4.2
Power-Check – Die ODER-Verknüpfung (OR)
Beim Startcheck soll die gelbe Kontrolllampe leuchten, wenn die Batteriespannung zu niedrig oder der
Strom zu hoch ist.
– Zeichen Sie den Stromlaufplan der ODER-Verknüpfung und ergänzen Sie die Wertetabelle sowie das
Zeitablaufdiagramm!
1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 21
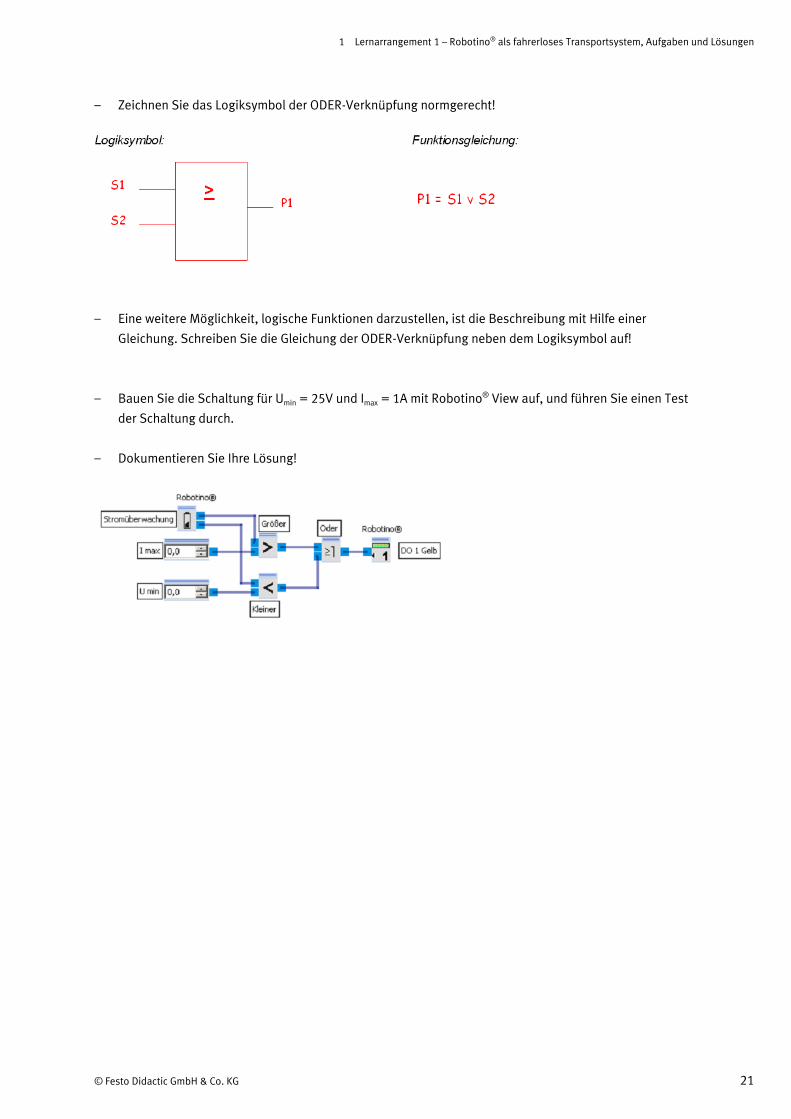
– Zeichnen Sie das Logiksymbol der ODER-Verknüpfung normgerecht!
– Eine weitere Möglichkeit, logische Funktionen darzustellen, ist die Beschreibung mit Hilfe einer
Gleichung. Schreiben Sie die Gleichung der ODER-Verknüpfung neben dem Logiksymbol auf!
– Bauen Sie die Schaltung für Umin = 25V und Imax = 1A mit Robotino® View auf, und führen Sie einen Test
der Schaltung durch.
– Dokumentieren Sie Ihre Lösung!

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
22 © Festo Didactic GmbH & Co. KG
Teilaufgabe 1.4.3
Ready-Check – Die NICHT-Verknüpfung (NOT)
Bei der NICHT-Verknüpfung wird das Ausgangssignal invertiert, d.h. es liegt das umgekehrte Eingangssignal
am Ausgang an. Informieren Sie sich über die NICHT-Funktion in Ihrem Fachbuch.
– Zeichnen Sie den Stromlaufplan und ergänzen Sie die Wertetabelle und das Zeitablaufdiagramm.
– Zeichnen Sie das Logiksymbol der NICHT-Verknüpfung normgerecht, und geben Sie die
Funktionsgleichung mit an!

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 23
Beim Startcheck soll die grüne Kontrolllampe leuchten, wenn der Schlüsselschalter eingeschaltet ist und
nicht die Freigabetaste und nicht die die Stoßleiste betätigt sind.
– Zeichnen Sie den Stromlaufplan für die geforderte Funktion und stellen Sie die Wertetabelle sowie die
Funktionsgleichung auf!
– Bauen Sie die Schaltung mit Robotino® View auf, und führen Sie einen Test der Schaltung durch.
– Erfüllt die Schaltung die geforderte Funktion, so dokumentieren Sie die Lösung für Ihre Unterlagen.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
24 © Festo Didactic GmbH & Co. KG
Aufgabe 1.5
Erweiterung des Power-Checks – Das RS-Speicherglied
Die Kontrollschaltung für Strom bzw. Spannungsüberwachung soll verbessert werden.
Wie Sie vielleicht schon festgestellt haben, leuchtet die Kontrolllampe nur so lange, wie der Strom den
eingestellten Wert überschreitet bzw. die Spannung den Wert unterschreitet.
Um mögliche Störungen zu erkennen, soll die Leuchte auch nach nur kurzer Abweichung von den
Normwerten dauerhaft leuchten.
– Wie kann man das erreichen?
Das Ausgangssignal muss gespeichert werden, damit die Lampe auch nach einer kurzen Abweichung
von den Normwerten dauerhaft leuchtet.
Zum Speichern von Signalen können sog. RS-Speicherglieder (Selbsthalterelais) verwendet werden. Im
Folgenden ist das Logiksymbol eines RS-Speichergliedes mit der logischen Funktionsgleichung angegeben.
Logiksymbol
Funktionsgleichung
S
Q1R
1 1 1 2Q ( I Q ) I

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 25
S
R
Q
– Beschreiben Sie die Ein- und Ausgänge des Selbsthalterelais mit Hilfe der Robotino®-Hilfe (Objekt
markieren und Taste F1 drücken)!
Eingänge:
S: Über den Eingang S setzen Sie den Ausgang Q auf 1.
R: Über den Eingang R setzen Sie den Ausgang Q auf 0 zurück.
Wenn S und R gleichzeitig 1 sind, dann wird zurückgesetzt
Ausgang:
Q: Q schaltet mit S ein und bleibt ein, bis Eingang R gesetzt wird.
– Ergänzen Sie das folgende Zeitablaufdiagramm!

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
26 © Festo Didactic GmbH & Co. KG
Die Funktion eines RS-Speichergliedes ist vergleichbar mit einer Schützschaltung mit Selbsthaltung.
– Zeichnen Sie den Stromlaufplan einer Selbsthalteschaltung!
– Entwerfen Sie mit Hilfe der logischen Gleichung (s. o.) ein RS-Speicherglied mit UND-, ODER- und NICHT-
Verküpfungen.
Hinweis
Q1 in der Klammer kann wie ein „normaler“ Eingang verwendet werden.
1
I1
I2
&
>1
Q1
2)11(1 IQIQ

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 27
Erweitern Sie Ihre „Power-Check-Schaltung“ mit einem RS-Baustein so, dass die Kontrollleuchte bei einer
kurzzeitigen Abweichung dauerhaft leuchtet!
– Dokumentieren Sie die Lösung für Ihre Unterlagen.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
28 © Festo Didactic GmbH & Co. KG
Aufgabe 1.6
Transport von Werkstücken mit Robotino®
Robotino® soll zum Transport von Werkstücken eingesetzt werden. Dabei soll der Roboter folgende
Aufgaben erfüllen:
1. Fahrt vorwärts bis zu einer schwarzen Markierung vor dem Regallager.
2. Stoppen sobald die schwarze Markierung erreicht ist.
3. Seitwärtsfahrt bis Robotino® vor dem Magazin ausgerichtet ist.
4. Fahrt vorwärts bis die Endposition im Magazin erreicht ist.
5. Greifen des Werkstücks.
6. Rückwärtsfahrt bis zu einer induktiven Markierung.
7. Seitwärtsfahrt bis zum nächsten Magazin.
8. Fahrt vorwärts bis die Endposition im Magazin erreicht ist.
9. Werkstück durch Öffnen des Greifers freigeben.
1 2
3 4
5 6
7
8
9

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 29
Teilaufgabe 1.6.1
Lineare Fahrt mit Robotino®
Damit Robotino® diese komplexe Aufgabe des Werkstücktransportes lösen kann, müssen Sie ihn
vorbereiten und „trainieren“. Als erstes soll der Roboter eine einfache Vorwärtsfahrt durchführen.
Schieben Sie Robotino® vorwärts, damit Sie sehen, welche Motoren angesteuert werden müssen. Die
Bezeichnung der Motoren finden Sie in der technischen Dokumentation. Beobachten Sie die Drehrichtung
und Drehgeschwindigkeit der Allseitenräder.
– Welche Motoren müssen angetrieben werden, damit Robotino® vorwärts fährt?
M1 und M3 müssen angetrieben werden.
– Erstellen Sie dazu in Robotino® View ein Unterprogramm so, dass Robotino® vorwärts fährt.
Bocken Sie das System auf, so dass die Räder frei bewegbar sind.
Verbinden Sie Robotino® mit dem Netz, und schalten Sie ihn ein.
Starten Sie Robotino® View und stellen Sie eine Verbindung zwischen der Steuerung von Robotino® und
Robotino® View her (siehe technischen Dokumentation).

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
30 © Festo Didactic GmbH & Co. KG
Ziehen Sie in das „Step 1“ Unterprogramm die zwei Motor-Funktionsblöcke Motor #1 und Motor #3
(Funktionsblockbibliothek: Robotino® Antriebssystem-> Motor).
Benennen Sie im Unterprogramm des Motor-Funktionsblocks die Motoren mit „MotorVorneLinks“ und
„MotorVorneRechts“.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 31
Geben Sie für beide Motoren eine konstante Geschwindigkeit vor.
Fügen Sie dazu dem Unterprogramm zwei Konstanten hinzu (Funktionsblockbibliothek -> Generatoren),
und verbinden Sie diese jeweils mit dem Eingang „Sollgeschwindigkeit“ der beiden Motoren.
Bezeichnen Sie die Konstanten entsprechend mit „DrehzahlLinks“ und „DrehzahlRechts“.
Starten Sie die Anwendung durch Klick auf das Startsymbol. Verändern Sie die Werte der beiden
Konstanten. Beachten Sie, dass die Sollgeschwindigkeit in Umdrehung pro Minute gemessen wird.
Beobachten Sie das Verhalten des Robotersystems sowohl im aufgebockten Zustand als auch im
fahrenden Zustand.
Hinweis
Falls die Motoren „unrund“ laufen und dies die Fahrt des Robotino® beeinträchtigt, prüfen Sie die
Standardeinstellung des PID Motorreglers im Funktionsblockdialog der Motoren:
Kp = 25, Ki = 25, Kd = 25
In der technischen Dokumentation ist festgelegt, dass Robotino® vorwärts fährt, wenn er sich linear in
Blickrichtung der Kamera bewegt.
Wählen Sie die Werte der Konstanten z. B. DrehzahlLinks = -500 [U/min]
DrehzahlRechts = 500 [U/min]
dann fährt Robotino® vorwärts.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
32 © Festo Didactic GmbH & Co. KG
– Welche Motoren müssen angetrieben werden, damit Robotino® rückwärts fährt?
Auch für die Fahrt rückwärts werden die Motoren M1 und M3 benötigt.
– Welche Werte müssen die Konstanten für die Rückwärtsfahrt haben?
Die Vorzeichen müssen umgedreht werden. DrehzahlLinks = 500 [U/min]
DrehzahlRechts = -500 [U/min]
– Kontrollieren Sie Ihre Antworten mit Hilfe von Robotino®!

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 33
Teilaufgabe 1.6.2
Kollisionsschutz
Ihr Robotino® fährt nun wie gewünscht vorwärts. Aber was passiert, wenn er mit einem Gegenstand
kollidiert? Damit Robotino® eine Kollision erkennt, hat er um das gesamte Chassis eine Stoßleiste, die als
Kollisionsschutzsensor eingesetzt wird.
Finden Sie mit Hilfe Ihrer Fachbücher das Schaltzeichen einer Sicherheitsleiste (Stoßleiste) mit
entsprechender Kennzeichnung heraus und zeichnen Sie es normgerecht!
– Sicherheitsleiste (Stoßleiste):
– Beschreiben Sie mit eigenen Worten die Funktion der Sicherheitsleiste!
Bei Druck auf die Leiste werden zwei leitfähige Bereiche kurzgeschlossen und die
Auswerteeinrichtung erhält ein Signal.
Durch ein Ruhestromprinzip kann ein möglicher Kabelbruch erkannt werden.
Sicherheitsleisten dienen zur Absicherung von Quetsch- und Scherstellen und schützen somit vor
Verletzungen von Personen und Schäden an Maschinen.
– Nennen Sie mögliche Anwendungsgebiete von Sicherheitsleisten in der Technik!
Sicherheitsleisten finden Anwendung bei Schiebetüren, Bustüren, beweglichen Schutzhauben,
Elektrischen Dachfenstern, Hubtischen usw.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
34 © Festo Didactic GmbH & Co. KG
Im Normalfall wird die Sicherheitsleiste praktisch nie betätigt, d. h. die Funktion wird nie überprüft. Tritt nun
im Laufe der Zeit ein Drahtbruch zwischen der Sicherheitsleiste und der Steuerung auf, so würde dieser evtl.
nicht bemerkt werden.
– Wodurch wird ein Kabelbruch an der Sicherheitsleiste von Robotino® erkannt?
Die eingesetzte Schaltleiste arbeitet nach dem Ruhestromprinzip. D. h., fließt kein Ruhestrom, dann
liegt ein Kabelbruch oder eine beschädigte Schaltleiste vor.
Eine weitere Schutzfunktion für Mensch und Maschine stellt die Not-Halt bzw. Not-Aus-Einrichtung dar.
Informieren Sie sich in Ihrem Fachbuch über Not-Aus-Einrichtungen!
– Zeichnen Sie das Schaltzeichen eines Not-Aus-Schalters normgerecht!
– Welche möglichen Formen haben Bedienteile von Not-Aus-Einrichtungen?
Pilzform, Palmenform, Reißleine, Trittleiste
– Was muss bei der Entriegelung von Not-Aus-Einrichtungen beachtet werden?
Durch das Entriegeln der Not-Aus-Einrichtung darf es nicht unmittelbar zum Wiederanlauf einer
Maschine kommen.
Lesen Sie sich die Hilfe in Robotino® View zur Stoßleiste und zum Motor durch!

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 35
Um das Verhalten der Stoßleiste zu verdeutlichen, soll die folgende Aufgabenstellung gelöst werden:
Ein Motor von Robotino® soll so angesteuert werden, dass er beim Berühren der Stoßleiste stoppt und beim
Loslassen derselben wieder weiterläuft.
– Welche Komponenten benötigen Sie für dieses Steuerungsprogramm?
Konstante, Motor, Stoßleiste
– Wo muss die Stoßleiste am Motor angeschlossen werden?
Die Stoßleiste muss am Eingang „Bremse“ angeschlossen werden.
– Erstellen Sie bitte ein neues Unterprogramm mit der geforderten Funktion!
Momentan fährt Ihr Robotino® nach Entfernen des Hindernisses weiter.
– Was müsste der Schaltung hinzugefügt werden, damit Robotino® nach dem Berühren der Stoßleiste
nicht mehr weiterfährt?
Es müsste ein RS-Baustein (Selbsthalterelais) hinzugefügt werden, damit Robotino® nach einer
Betätigung der Stoßleiste nicht mehr weiterfährt.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
36 © Festo Didactic GmbH & Co. KG
– Erweitern Sie Ihre Schaltung dementsprechend!
– Wie kann erreicht werden, dass Robotino® nach Beseitigung des Hindernisses wieder weiterfährt?
Mit einem 1-Signal auf dem Reset-Eingang des RS-Bausteins wird die Selbsthaltung zurückgesetzt.
Somit wird die Bremse des Motors wieder deaktiviert.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 37
Teilaufgabe 1.6.3
Vorwärtsfahrt mit Hilfe des Omniantriebs
Durch unterschiedliche Ansteuerung der drei Antriebsmotoren ergibt sich eine Vielzahl von
Bewegungsmustern für Robotino®. Durch diese große Anzahl von Möglichkeiten ist es recht komplex,
Robotino® zu steuern. Um ihn in eine Richtung zu bewegen, muss die Drehung der einzelnen Räder
koordiniert werden, da nur das korrekte Zusammenspiel die gewünschte Bewegung erzeugt. Mit Hilfe des
Funktionsblocks „Omniantrieb“ kann Robotino® sehr einfach das gewünschte Bewegungsmuster ausführen.
Hinweis
Der Funktionsblock Omniantrieb ist in der Funktionsbibliothek Antriebssystem enthalten.
Es beschreibt ein kinematisches Modell von Robotino®. Die Eingänge auf der „linken“ Seite sind
– Soll-Geschwindigkeit in x-Richtung [mm/s]
– Soll-Geschwindigkeit in y-Richtung [mm/s]
– Soll-Drehgeschwindigkeit in [grad/s]
Das Modul liefert als Ausgänge hierzu die Soll-Drehzahlen in [Umdrehungen pro Minute] für die drei
Motoren.
Das Koordinatensystem ist so gewählt, dass die positive x-Achse mit der Vorwärtsrichtung für Robotino®
übereinstimmt.
– Informieren Sie sich über den Funktionsblock „Omniantrieb“ und das Eingabegerät „Steuerungsfeld“ in
der Hilfe.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
38 © Festo Didactic GmbH & Co. KG
Lassen Sie Robotino® in alle möglichen Richtungen fahren. Öffnen Sie dazu ein neues Unterprogramm und
setzen Sie den Funktionsblock „Omniantrieb“ und das „Steuerungsfeld“ ein.
– Erstellen Sie nun Ihr Programm für die Vorwärtsfahrt mit Hilfe des Omniantriebs! Geben Sie für die
Konstante einen Wert von 100 mm/s an.
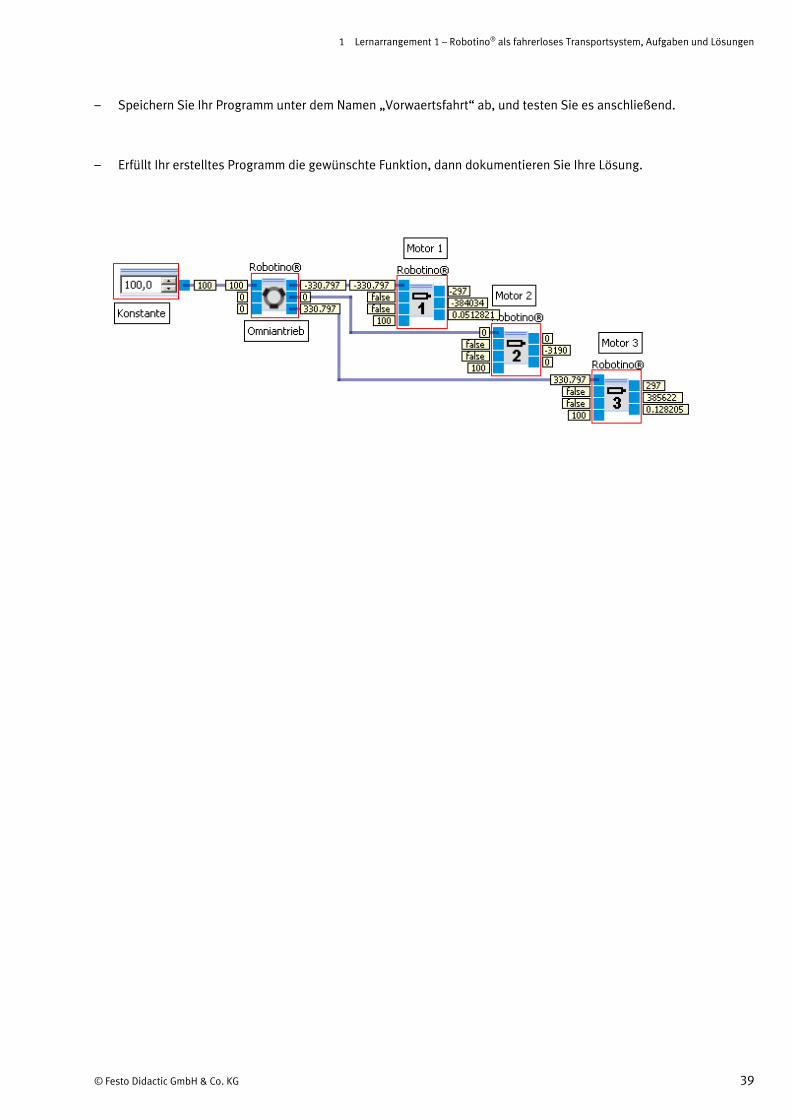
1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 39
– Speichern Sie Ihr Programm unter dem Namen „Vorwaertsfahrt“ ab, und testen Sie es anschließend.
– Erfüllt Ihr erstelltes Programm die gewünschte Funktion, dann dokumentieren Sie Ihre Lösung.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
40 © Festo Didactic GmbH & Co. KG
Teilaufgabe 1.6.4
Stoppen an der schwarzen Linie
Nun fährt Robotino® bereits vorwärts. Damit er an der schwarzen Markierungslinie stehen bleibt, benötigt er
einen Sensor der eine schwarze Linie erkennen kann. Hierzu wird ein optischer Näherungssensor verwendet,
der aus einem Licht-Sender und einem Licht-Empfänger besteht.
Informieren Sie sich in den Robotino®-Unterlagen (Teil-B-Theorie) über optische Näherungsschalter und
beantworten Sie anschließend die Fragen!
– Aus welchen grundsätzlichen Hauptbaugruppen bestehen optische Näherungsschalter?
Optische Näherungsschalter bestehen aus einem Sender und einem Empfänger.
– Erklären Sie die Funktionsweise von optischen Näherungssensoren!
Der Sender schickt ein Rotlicht aus, welches im Empfänger ausgewertet wird. Das ausgesendete Licht
wird dabei, je nach Material und Farbe, an der Oberfläche unterschiedlich reflektiert.
– Wie werden optische Sensoren genannt, deren Sender und Empfänger in einem gemeinsamen Gehäuse
untergebracht sind?
Sind Sender und Empfänger in einem gemeinsamen Gehäuse untergebracht, so spricht man von
einem sog. Reflexlichttaster oder einer Reflex-Lichtschranke.
– Wie werden optische Sensoren genannt, deren Sender und Empfänger in getrennten Gehäusen
untergebracht sind?
Befinden sich Sender und Empfänger in getrennten Gehäusen, so spricht man von einer Einweg-
Lichtschranke.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 41
– Reflex-Lichttaster können mit sog. Lichtleitervorsätzen montiert werden. Nennen Sie zwei Vorteile, die
sich durch den Einsatz von Lichtleitervorsätzen ergeben!
– Erfassen von Objekten an schlecht zugänglichen Stellen
– Durch die abgesetzte Montage ist ein Einsatz in gefährdeter Umgebung möglich
– Präzise Erfassung kleiner Objekte
– Die Übertragung der Lichtsignale erfolgt mit einem Lichtleiter. Wie lautet der englische Begriff für
Lichtleiter?
Fibre-optic cable
Die beiden Reflexlichttaster sollen nun an Robotino® installiert werden. Bevor Sie jedoch mit der Montage
beginnen, informieren Sie sich zuerst im Robotino®-Handbuch über den fachgerechten Einbau der Sensoren
und bearbeiten Sie die folgenden Aufgaben.
– Welches Werkzeug bzw. welche Komponenten benötigen Sie zum Einbau der Sensoren?
Werkzeug:
• Lichtleiter-Schneidgerät
• Sechskant 3 mm
Pro Sensor werden folgende Komponenten benötigt:
• 1 Lichtleitergerät
• 1 Lichtleiter
• 1 Halterung für den Lichtleiterkopf

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
42 © Festo Didactic GmbH & Co. KG
– Beschreiben Sie stichpunktartig das Vorgehen beim Einbau der Sensoren.
1. Reflexlichttaster vormontieren.
Lichtleiter auf die benötigte Länge kürzen.
Lichtleiterkopf in die Halterung einschrauben.
Lichtleiterkopf befestigen.
Freie Enden des Lichtleiters mit dem Lichtleitergerät verbinden.
2. Halterung mit Lichtleiterkopf am Chassis montieren.
3. Lichtleitergerät am Montageblech des Robotino® befestigen
4. Anschluss der Sensoren an der E/A-Schnittstelle
– An welche Sensor-Eingänge müssen die Reflexlichttaster angeschlossen werden?
Begründen Sie Ihre Antwort!
Die Reflexlichttaster müssen an digitale Sensoreingänge (z.B. DI1 – DI4) angeschlossen werden, da es
sich bei den eingesetzten Reflexlichttastern um digitale Sensoren handelt (Signal ist 1 oder 0).
– Zeichnen Sie die Leitungen auf der unten dargestellten E/A-Schnittstelle ein und bezeichnen Sie diese
mit ihren Eigenschaften und ihrer Farbe.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 43
Montieren Sie beide Reflexlichttaster an den hierfür vorgesehenen Stellen des Chassis, und schließen Sie
die Leitungen gemäß Ihrer obigen Zeichnung an die E/A-Schnittstelle an.
– Justieren Sie die Reflexlichttaster und beschreiben Sie Ihr Vorgehen.
Sensoren an die Stromversorgung der E/A-Schnittstelle anschließen.
Robotino® auf den zu befahrenden Untergrund stellen.
Mit dem beiliegenden kleinen Schraubendreher an der Einstellschraube drehen, bis die
Schaltzustandsanzeige (LED) einschaltet.
Ein Objekt entsprechend der zu befahrenden Markierung unter Robotino® legen.
Die Schaltzustandsanzeige muss ausschalten. Eventuell nachjustieren.
– Tragen Sie in der Grafik alle Eingänge der beiden Reflexlichttaster ein.
Bezeichnen Sie sie mit Ihrer Zugehörigkeit zum Sensor und der Farbe der angeschlossenen Leitungen.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
44 © Festo Didactic GmbH & Co. KG
Öffnen Sie ein neues Unterprogramm und weisen Sie in Robotino® View die Eingänge entsprechend Ihrer
Vorgabe den einzelnen Eingangs-Funktionsblöcken zu. Bezeichnen Sie die Eingangs-Funktionsblöcke
entsprechend Ihrer Vorgaben.
Um die einwandfreie Funktion der Sensoren zu überprüfen, ermitteln Sie die Sensorwerte für die
unterschiedlichen Eingänge in Robotino® View. Voraussetzung ist, dass Robotino® auf dem später zu
befahrenden Untergrund steht und entsprechend justiert wurde.
– Tragen Sie die Sensorwerte in die untenstehende Tabelle ein.
Eingang Signal
Eingang DI0 (Sensor rechts) 0
Eingang DI1 (Sensor rechts) 1
Eingang DI2 (Sensor links) 0
Eingang DI3 (Sensor links) 1
1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 45
– Bewerten Sie die ermittelten Sensorsignale der Eingänge bezüglich ihrer Schaltfunktion.
Jeder Sensor besitzt zwei Signalleitungen mit unterschiedlichen Funktionen.
Die weiße Signalleitung für die Hellschaltung.
Die schwarze Signalleitung für die Funktion Dunkelschaltung.
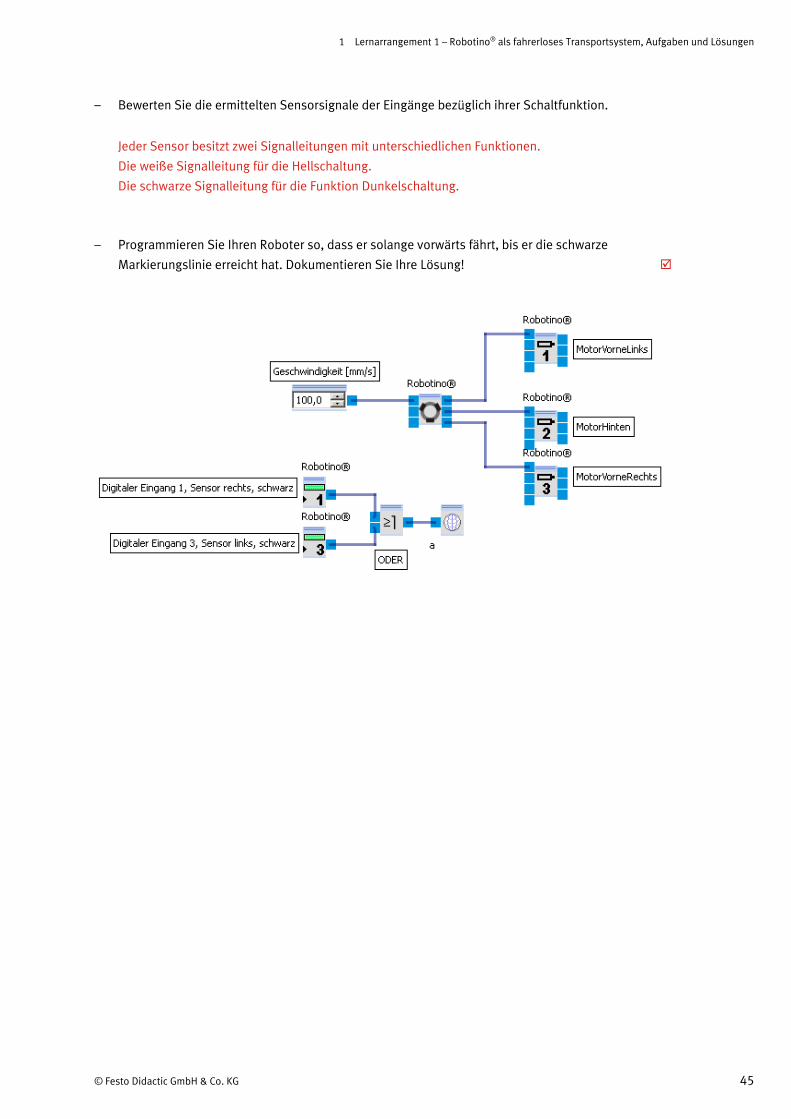
– Programmieren Sie Ihren Roboter so, dass er solange vorwärts fährt, bis er die schwarze
Markierungslinie erreicht hat. Dokumentieren Sie Ihre Lösung!

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
46 © Festo Didactic GmbH & Co. KG
Teilaufgabe 1.6.5
Seitwärtsfahrt bis zur Ausrichtung vor dem Magazin
Robotino® soll nun so lange seitwärts fahren, bis er die richtige Position am Magazin erreicht hat.
– Welche Bedingung muss erfüllt sein, damit der Roboter in der richtigen Position stehen bleibt?
Es muss von beiden optischen Sensoren eine weiße Fläche erkannt werden.
Die beiden Sensoren müssen bei der Dunkelschaltung eine logische 0 erzeugen. (1)
Oder alternativ:
Die beiden Sensoren für die Hellschaltung müssen eine logische 1 erzeugen. (2)
– Ergänzen Sie für die Stopp-Bedingung die Funktionstabelle und geben Sie die Funktionsgleichung an!
(1) (2)
D1 D3 X D2 D4 X
0 0 1 0 0 0
0 1 0 0 1 0
1 0 0 1 0 0
1 1 0 1 1 1
_ _ X = D1 D3
X = D2 D4
Ein-und Ausgänge ändern
– Zeichnen Sie den Funktionsplan!
(1)

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 47
(2)
– Programmieren Sie Robotino® so, dass er in der richtigen Magazinposition stehen bleibt, und
dokumentieren Sie Ihr Programm!

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
48 © Festo Didactic GmbH & Co. KG
Teilaufgabe 1.6.6
Vorwärtsfahrt zur Endposition im Magazin
Damit Robotino® das Werkstück aufnehmen kann, muss er mit einem Greifer nachgerüstet werden.
– Bevor Sie den Greifer montieren, lesen Sie das Informationsblatt „Elektrischer Greifer“ durch und
beantworten Sie die folgenden Fragen.
– Wodurch wird erkannt, dass sich Robotino® in der Endposition am Magazin befindet?
Fährt Robotino® an das Magazin, so wird ein Schieber nach hinten geschoben. Beim Erreichen der
Endposition wird ein Taster betätigt.
– Positionsschalter werden oft auch als Grenztaster oder Endschalter bezeichnet. Wie lauten die
englischen Begriffe für Grenztaster und Endschalter?
Grenztaster – position switch
Endschalter – limit switch
– Zeichnen Sie das Schaltzeichen eines Positionsschalters, und beschriften Sie es normgerecht!
– Bestimmen Sie mit Hilfe eines Durchgangprüfers die Anschlüsse des Positionsschalters.
Hinweis
Achten Sie darauf, ob der Schieber betätigt ist oder nicht!
B
schwarz
blau grau
1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 49
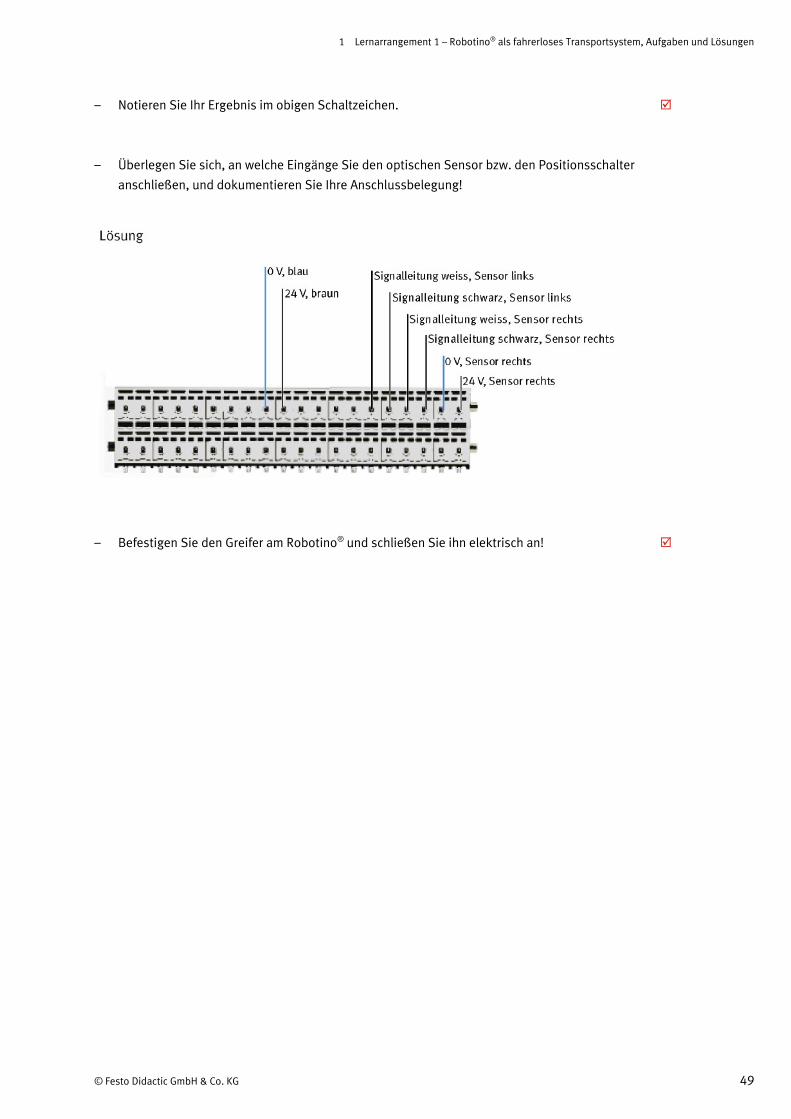
– Notieren Sie Ihr Ergebnis im obigen Schaltzeichen.
– Überlegen Sie sich, an welche Eingänge Sie den optischen Sensor bzw. den Positionsschalter
anschließen, und dokumentieren Sie Ihre Anschlussbelegung!
– Befestigen Sie den Greifer am Robotino® und schließen Sie ihn elektrisch an!

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
50 © Festo Didactic GmbH & Co. KG
– Erstellen Sie ein Programm, das Robotino® stoppt,
sobald er seine Endposition im Magazin erreicht hat.
– Testen Sie, ob Robotino® beim Erreichen der Endposition stoppt.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 51
Teilaufgabe 1.6.7
Erkennen und Greifen des Werkstücks
Der Greifer von Robotino® soll nur betätigt werden, wenn sich ein Werkstück im Magazin befindet.
– Womit wird ein Werkstück zwischen den Greiferbacken erkannt?
Ein Werkstück zwischen den Greiferbacken wird durch eine Lichtschranke erkannt (Reflex-Lichttaster)
– Wie erfolgt die Auswertung, ob der Greifer geschlossen oder geöffnet ist?
Die Auswertung erfolgt über den Motorstrom.
– Erstellen Sie ein Programm, welches nach Erkennen des Werkstückes den Greifer betätigt!
– Testen Sie die Funktion Ihres Programms und dokumentieren Sie Ihre Lösung
wenn die Funktion erfüllt wird!

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
52 © Festo Didactic GmbH & Co. KG
Teilaufgabe 1.6.8
Rückwärtsfahrt bis zu einer induktiven Markierung
Robotino® soll nach Aufnahme des Werkstückes so lange zurückfahren, bis er an einer induktiven
Markierung (Aluminium-Klebeband) angekommen ist.
Informieren Sie sich im Fachbuch und im Robotino®-Handbuch über induktive Sensoren!
– Nennen Sie drei Anwendungsgebiete von induktiven Sensoren!
• Unterscheidung verschiedener metallischer Materialien
• Messung von Abständen
• Montagekontrolle
– Was ist der Unterschied zwischen einem analogen Signal und einem binären Signal?
Ein analoges Signal ist stetig veränderbar, d.h. es kann jeden beliebigen Wert annehmen. Ein binäres
Signal hat nur die zwei Zustände 1 und 0.
– Handelt es sich bei dem an Robotino® eingesetzten induktiven Sensor um einen analogen oder einen
digitalen Sensor? Begründen Sie Ihre Antwort!
Es handelt sich um einen analogen Sensor, da er jeden beliebigen Spannungswert zwischen 0 und 10
Volt annehmen kann.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 53
– Ermitteln Sie die benötigten Anschlüsse des Sensors entsprechend dem Handbuch, der
Bedienungsanleitung und dem Datenblatt.
Zeichen Sie anschließend die Leitungen auf der unten dargestellten Zeichnung ein, und bezeichnen Sie
sie mit ihren Eigenschaften und ihrer Farbe.
Hinweis
Beachten Sie, dass die E/A-Schnittstelle von Robotino® ausschließlich Spannungswerte verarbeitet!
– Im Datenblatt des induktiven Näherungssensors steht als Schutzart IP 67.
Was sagt diese Angabe aus?
1. Ziffer: Berührungs- und Fremdkörperschutz 6 = Schutz gegen Staubeintritt
2. Ziffer: Wasserschutz 7 = Schutz gegen zeitweiliges Untertauchen
– Beim Einbau des Sensors ist sein Erfassungsbereich von wichtiger Bedeutung. Wie groß ist der
Erfassungsbereich des Sensors?
Der Erfassungsbereich des Sensors beträgt 0 – 6 mm
– Um die Montage des Sensors reibungslos durchzuführen, ist eine vorherige Planung nötig.
Informieren Sie sich, wo der induktive Sensor an Robotino® befestigt werden muss!

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
54 © Festo Didactic GmbH & Co. KG
– Erstellen Sie bitte einen Arbeitsplan für die Montage sowie die Inbetriebnahme des Sensors, und stellen
Sie eine Material- und Werkzeugliste zusammen.
Arbeitsplan
Arbeitsschritt Benötigte Zeit Erledigt
Montage des Sensors am Robotino®.
Anschluss des Sensorkabels an der E/A-Leiste und an den
Sensor.
Zugriff auf die Sensordaten mit Robotino® View herstellen.
Funktionsprüfung des Sensors
Benötigte Gesamtzeit:
Benötigtes Material und Werkzeug
Anzahl Werkzeug / Material
1 Seitenschneider
1 Crimpzange
3 Aderendhülsen 0,25 mm2
Kabelbinder
– Montieren Sie den Sensor an Robotino®, und schließen Sie ihn elektrisch an!
Führen Sie nach erfolgter Montage des Sensors eine Funktionsprüfung des Sensors durch. Öffnen Sie dazu
ein neues Unterprogramm. Ziehen Sie einen Analogeingang auf die Arbeitsfläche und weisen Sie ihm den
beim Anschluss verwendeten Eingang zu.
Hinweis
Durch die Tastenkombination Strg+D können die Werte des Sensors angezeigt werden.

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 55
Überprüfen Sie die Reaktionsweise des induktiven Sensors bezüglich unterschiedlicher Materialien
(Legierungen) und ermitteln Sie den Zusammenhang zwischen Entfernung und Fläche des Objektes und den
Sensorwerten.
– Verwenden Sie als Prüfobjekte die €-Münzen von 1 Cent bis 2 €. Legen Sie jeweils eine der Münzen auf
dem Untergrund in den Erfassungsbereich des Sensors und tragen Sie die gemessene
Ausgangsspannung (V) in die untenstehende Tabelle ein. Um die Werte für unterschiedliche
Entfernungen zu ermitteln, legen Sie je eine nichtmetallische Unterlage (Papier, Pappe oder Kunststoff)
unter die jeweilige Münze.
Wert Durch
messer
(mm)
Dicke
(mm)
Material magnetisch Ausgangs-
spannung
(V)
Ausgangs-spannung
(V) mit Unterlage
1 Cent 16,25 1,67 Stahl mit Kupfer-Ummantelung (Fe, Cu) ja 8,88 5,08 / 2,72
2 Cent 18,75 1,67 Stahl mit Kupfer-Ummantelung ja 7,92 5,16 / 2,80
5 Cent 21,25 1,67 Stahl mit Kupfer-Ummantelung ja 6,40 5,36 / 2,92
10 Cent 19,75 1,93 Nordisches Gold (Cu89 Al5 Zn5 Sn1) nein 10,20 7,12 / 3,84
20 Cent 22,25 2,14 Nordisches Gold (Cu89 Al5 Zn5 Sn1) nein 9,84 5,80 / 3,00
50 Cent 24,25 2,38 Nordisches Gold (Cu89 Al5 Zn5 Sn1) nein 7,92 4,76 / 2,72
1 Euro 23,25 2,33 außen: Messing-Ni (Cu75 Zn20 Ni5)
innen: Cu-Ni, Ni, Cu-Ni geschichtet
schwach 9,76 3,36 / 1,88
2 Euro 25,75 2,20 außen: Cu-Ni (Cu75 Ni25),
innen: Messing-Ni, Ni, Messing-Ni
geschichtet
schwach 4,40 3,24 / 2,96
1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
56 © Festo Didactic GmbH & Co. KG
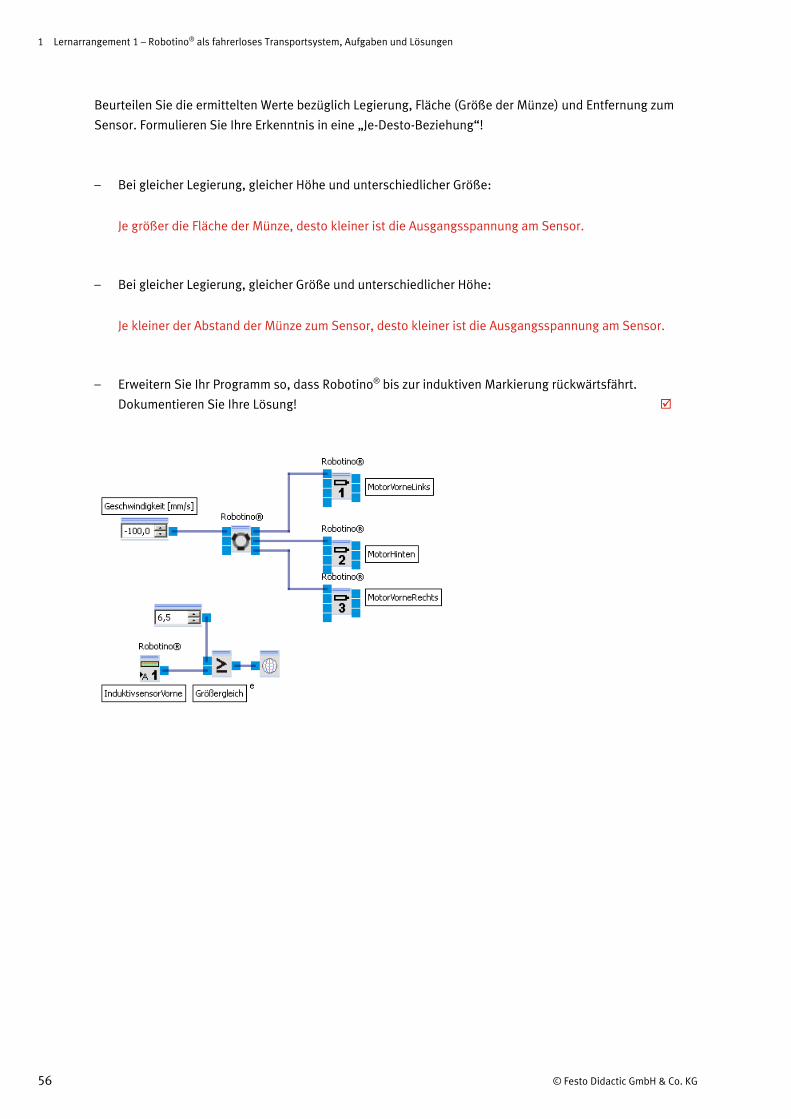
Beurteilen Sie die ermittelten Werte bezüglich Legierung, Fläche (Größe der Münze) und Entfernung zum
Sensor. Formulieren Sie Ihre Erkenntnis in eine „Je-Desto-Beziehung“!
– Bei gleicher Legierung, gleicher Höhe und unterschiedlicher Größe:
Je größer die Fläche der Münze, desto kleiner ist die Ausgangsspannung am Sensor.
– Bei gleicher Legierung, gleicher Größe und unterschiedlicher Höhe:
Je kleiner der Abstand der Münze zum Sensor, desto kleiner ist die Ausgangsspannung am Sensor.
– Erweitern Sie Ihr Programm so, dass Robotino® bis zur induktiven Markierung rückwärtsfährt.
Dokumentieren Sie Ihre Lösung!

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 57
Teilaufgabe 1.6.9
Seitwärtsfahrt bis zum nächsten Magazin
Robotino® soll so lange seitwärts fahren, bis er die nächste Position am Magazin erreicht hat.
– Wie kann eine richtige Positionierung von Robotino® vor dem nächsten Magazin erreicht werden?
Fahrt seitwärts, bis beide optische Sensoren die schwarze Fläche erkannt haben. Danach
weiterfahren, bis beide Sensoren wieder auf der weißen Fläche sind.
– Erstellen Sie die Programme für die Positionierung am zweiten Magazin!
– Überprüfen Sie, ob Ihre Programme die geforderte Funktion erfüllen!
– Dokumentieren Sie Ihre Lösungen und speichern Sie Ihre Programme ab!

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
58 © Festo Didactic GmbH & Co. KG
Teilaufgabe 1.6.10
Vorwärtsfahrt zur Endposition im Magazin
Ihr Robotino® befindet sich in der richtigen Position vor dem Magazin. Er muss jetzt so lange vorwärts
fahren, bis er seine Endposition zum Übergeben des Werkstücks erreicht hat.
– Wie erfolgt die Abfrage, dass Robotino® seine Endposition erreicht hat?
Die Abfrage erfolgt durch den Endschalter am Greifer.
– Erstellen Sie ein neues Programm, welches Robotino® so lange vorwärts fahren lässt,
bis er seine Endposition im Magazin erreicht hat.
– Überprüfen Sie, ob Ihre Programme die geforderte Funktion erfüllen!
– Dokumentieren Sie Ihre Lösung und speichern Sie Ihr Programm ab!

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 59
Teilaufgabe 1.6.11
Werkstück durch Öffnen des Greifers freigeben
Wenn die Endposition am Magazin erreicht wurde, muss das Werkstück wieder freigegeben werden.
– Wodurch erfolgt das Öffnen des Greifers von Robotino®?
Das Öffnen des Greifers erfolgt durch Anlegen eines „True (1)-Signals“ am „Öffnen“ Eingang.
– Erstellen Sie das Programm zum Öffnen des Greifers!
– Überprüfen Sie, ob Ihre Programme die geforderte Funktion erfüllen!
– Dokumentieren Sie Ihre Lösung und speichern Sie Ihre Lösung ab!

1 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Lösungen
60 © Festo Didactic GmbH & Co. KG

© Festo Didactic GmbH & Co. KG 61
Misch- und Abfüllanlage mit Robotino® als FTS
Aufgaben und Lösungen
Lernarrangement 2 – Steuerungen für Anlagen programmieren und realisieren

62 © Festo Didactic GmbH & Co. KG

© Festo Didactic GmbH & Co. KG 63
2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS,
Aufgaben und Lösungen
Aufgabe 2.1
Steuerung analysieren und anpassen
Der Getränkehersteller „Fun & Fresh“ hat ein neues Erfrischungsgetränk entwickelt und möchte dafür eine
moderne Misch- und Abfüllanlage errichten. Dazu soll eine bereits vorhandene verbindungsprogrammierte
Steuerung (VPS) so modifiziert werden, dass die Steuerung der Mischanlage durch eine
speicherprogrammierbare Steuerung (SPS) erfolgt. Die An- und Ablieferung der Getränkepaletten erfolgt
durch ein modernes fahrerloses Transportsystem (FTS) und wird durch Robotino® übernommen. Sie sind
bei der Planung und Errichtung dieser Anlage mit eingebunden und haben von Ihrem Projektleiter eine
Übersicht der einzelnen Teilprojekte in Form eines sogenannten Projektstrukturplans erhalten.
Teilprojekt
„Programmierung“
Teilprojekte „SPS“ Teilprojekte „Robotino“
Anlagen Start
Warnblinker
Stern-Dreieck-Anlauf
Zufuhr Flüssigkeiten
Mischvorgang
leere Palette holen
Warnblinker
Überwachung der Akkuspannung
leere Palette zur Mischanlage
Parkposition 1
volle Palette abholen
Farbkontrolle
Paletten verladen
Parkposition 2
Projekt
„Mischanlage“

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
64 © Festo Didactic GmbH & Co. KG
Schwarze Linie
Induktive Linie
Lagerplatz
Sensor
Getränkelager Händler B
Getränkelager Händler A
Mischanlage Palettenlager Sensor 1
2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 65
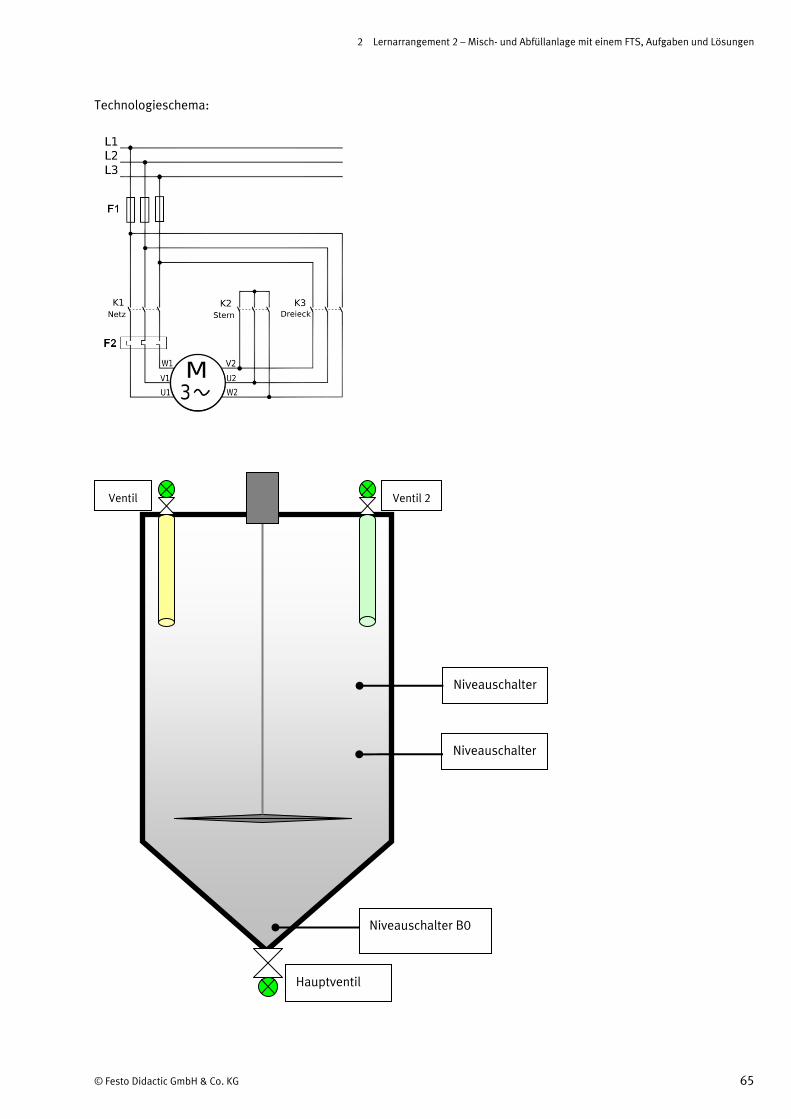
Technologieschema:
Hauptventil
Ventil Ventil 2
Niveauschalter
Niveauschalter
Niveauschalter B0
2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
66 © Festo Didactic GmbH & Co. KG
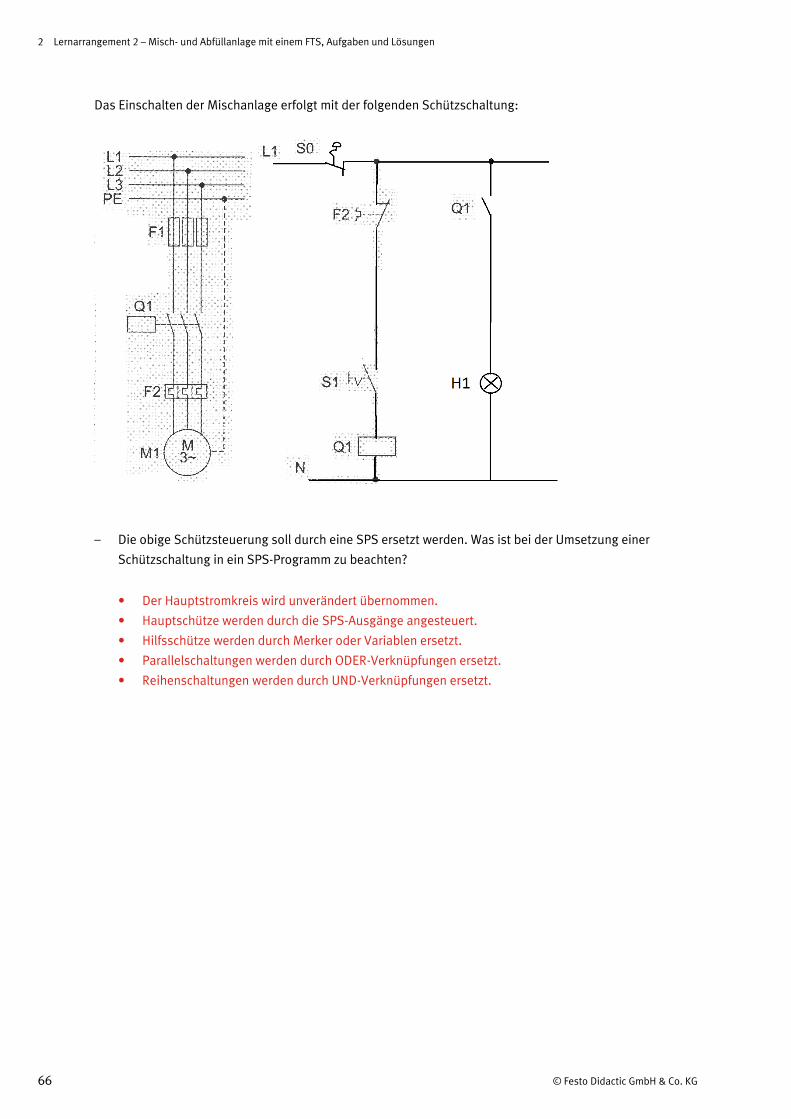
Das Einschalten der Mischanlage erfolgt mit der folgenden Schützschaltung:
– Die obige Schützsteuerung soll durch eine SPS ersetzt werden. Was ist bei der Umsetzung einer
Schützschaltung in ein SPS-Programm zu beachten?
• Der Hauptstromkreis wird unverändert übernommen.
• Hauptschütze werden durch die SPS-Ausgänge angesteuert.
• Hilfsschütze werden durch Merker oder Variablen ersetzt.
• Parallelschaltungen werden durch ODER-Verknüpfungen ersetzt.
• Reihenschaltungen werden durch UND-Verknüpfungen ersetzt.

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 67
SPS-Programme werden mit Hilfe einer Software (z.B. STEP7) auf einem PC erstellt und danach an die SPS
übertragen.
– In welchen Programmiersprachen kann das SPS-Programm dargestellt werden?
• Funktionsplan (FUP)
• Kontaktplan (KOP)
• Anweisungsliste (AWL)
– Ergänzen Sie die Übersicht der logischen Grundfunktionen Beispielen der jeweiligen
Programmiersprache.
Grundfunktion Funktionsplan
FUP
Kontaktplan
KOP
Anweisungsliste
AWL
UND
U E0.0
U E0.1
= A1.0
ODER
O E0.0
O E0.0
= A1.0
NICHT
UN E 0.0
= A1.0

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
68 © Festo Didactic GmbH & Co. KG
Damit Steuerprogramme fehlerfrei und wartungsfreundlich programmiert sind, sollten sie systematisch
entworfen und ausführlich dokumentiert sein.
Bei der Softwareentwicklung hat sich die folgende Vorgehensweise bewährt:
– Beschreiben Sie die Funktion der obigen Schützsteuerung mit eigenen Worten.
Damit die Anlage betriebsbereit ist (Netz-Schütz angezogen), muss der Netzschalter S1 eingeschaltet
sein, und es darf nicht der AUS-Schalter S0 betätigt sein, und der Motorschutzschalter F2 darf nicht
ausgelöst haben.
Problemanalyse
Entwurf
Realisierung
Inbetriebnahme
– verbale Beschreibung der Steuerungsaufgabe
– Technologieschema
– Variablendeklaration
– Ablaufplan
– Funktionsplan
– Anschlussplan
– Hardwarekonfiguration
– Programmierung in KOP, FUP oder AWL
– Simulation
– Aufbau der Anlage
– Test von Programmteilen
– Test des Gesamtprogramms

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 69
– Erstellen Sie eine Zuordnungstabelle.
Lösung siehe Kapitel „Musterlösung Symboltabelle“

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
70 © Festo Didactic GmbH & Co. KG
– Entwerfen Sie einen Funktionsplan nur mit den logischen Grundverknüpfungen (UND, ODER, NICHT)
– Sind die obigen Einschaltbedingungen gegeben, so soll das Netzschütz am Ausgang geschaltet werden.

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 71
Aufgabe 2.2
Einschalten der Mischanlage mit einem Taster
Anstatt eines Schalters soll der Start der Anlage mit Hilfe eines Ein-Tasters, und das Stoppen mit Hilfe eines
Aus-Tasters erfolgen
– Ergänzen Sie den Steuerstromkreis einer Schützschaltung mit Selbsthaltung.
Ein Aus Anlage
I 0

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
72 © Festo Didactic GmbH & Co. KG
Schützschaltungen mit Selbsthaltung können in der Digitaltechnik durch ein SR-Flipflop ersetzt werden.
– Überlegen Sie aufgrund der Schützschaltung die Rücksetz- und Setzbedingungen für die Flipflops und
entwickeln Sie so eine Digitalschaltung, die die Schützschaltung ersetzt.

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 73
Aufgabe 2.3
Kommunikation der SPS mit Robotino®
Über eine OPC Schnittstelle (EasyPort) kann die SPS mit Robotino® kommunizieren. Robotino® ist im
Gesamtsystem betrachtet sowohl ein intelligenter Aktor, welcher Befehle von der SPS erhält und diese
selbständig weiterverarbeitet, als auch ein intelligenter Sensor, der analoge und digitale Signale aufbereiten
kann und als Befehl an die SPS weiter gibt.
Damit Sie die OPC-Schnittstelle verwenden können, muss diese zuerst als neues Gerät unterhalb der
Funktionsblockbibliothek über den Button Hinzufügen eingefügt werden.
OPC Client in Funktionsbibliothek einfügen
2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
74 © Festo Didactic GmbH & Co. KG
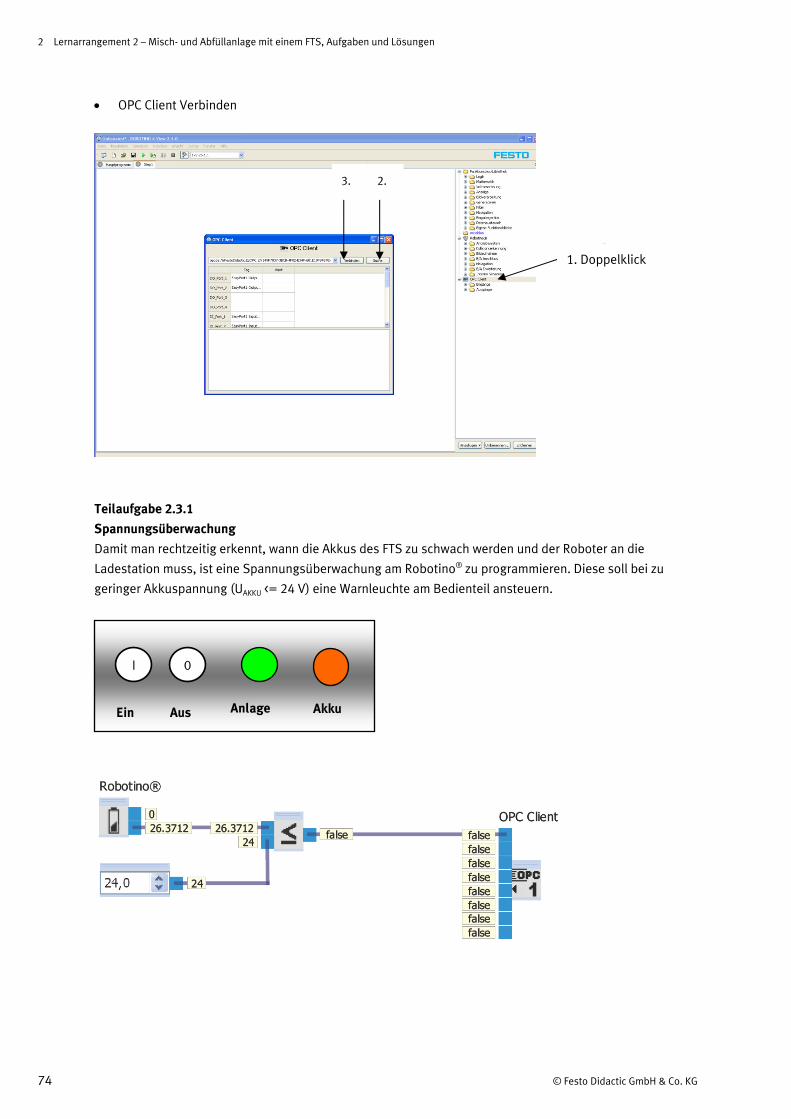
OPC Client Verbinden
Teilaufgabe 2.3.1
Spannungsüberwachung
Damit man rechtzeitig erkennt, wann die Akkus des FTS zu schwach werden und der Roboter an die
Ladestation muss, ist eine Spannungsüberwachung am Robotino® zu programmieren. Diese soll bei zu
geringer Akkuspannung (UAKKU <= 24 V) eine Warnleuchte am Bedienteil ansteuern.
Ein Aus Anlage
I 0
1. Doppelklick
3. 2.
Akku
2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 75
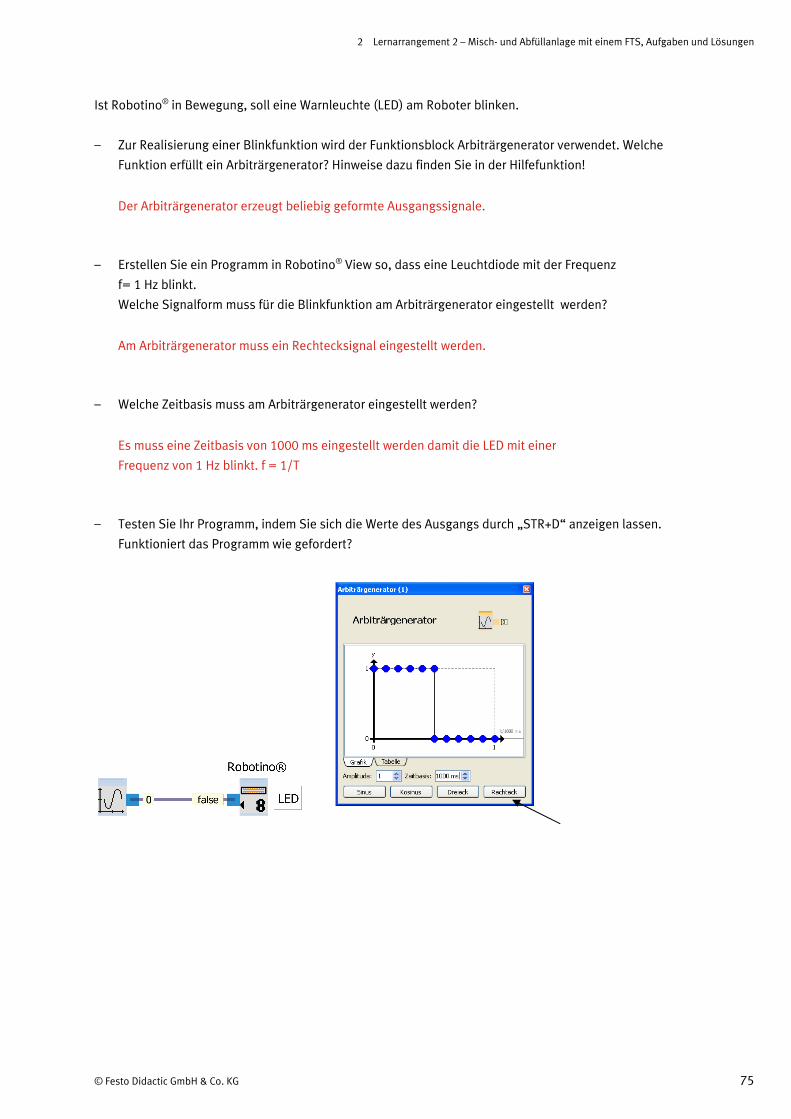
Ist Robotino® in Bewegung, soll eine Warnleuchte (LED) am Roboter blinken.
– Zur Realisierung einer Blinkfunktion wird der Funktionsblock Arbiträrgenerator verwendet. Welche
Funktion erfüllt ein Arbiträrgenerator? Hinweise dazu finden Sie in der Hilfefunktion!
Der Arbiträrgenerator erzeugt beliebig geformte Ausgangssignale.
– Erstellen Sie ein Programm in Robotino® View so, dass eine Leuchtdiode mit der Frequenz
f= 1 Hz blinkt.
Welche Signalform muss für die Blinkfunktion am Arbiträrgenerator eingestellt werden?
Am Arbiträrgenerator muss ein Rechtecksignal eingestellt werden.
– Welche Zeitbasis muss am Arbiträrgenerator eingestellt werden?
Es muss eine Zeitbasis von 1000 ms eingestellt werden damit die LED mit einer
Frequenz von 1 Hz blinkt. f = 1/T
– Testen Sie Ihr Programm, indem Sie sich die Werte des Ausgangs durch „STR+D“ anzeigen lassen.
Funktioniert das Programm wie gefordert?
2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
76 © Festo Didactic GmbH & Co. KG
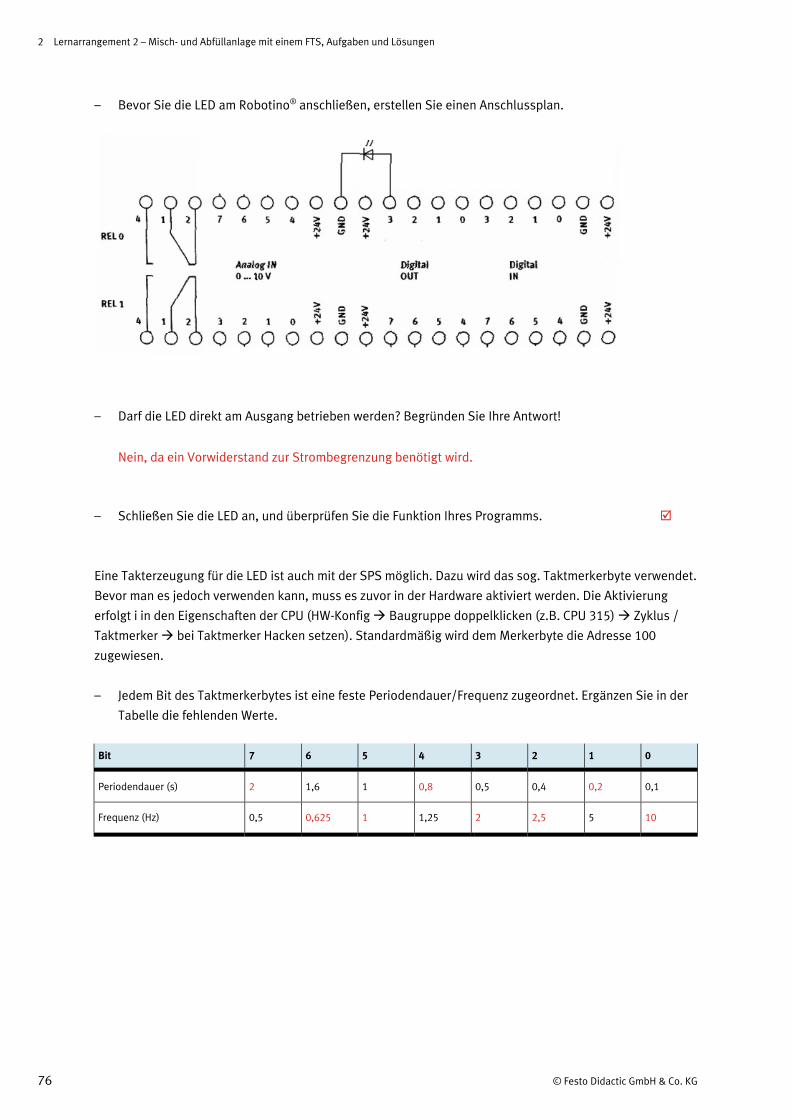
– Bevor Sie die LED am Robotino® anschließen, erstellen Sie einen Anschlussplan.
– Darf die LED direkt am Ausgang betrieben werden? Begründen Sie Ihre Antwort!
Nein, da ein Vorwiderstand zur Strombegrenzung benötigt wird.
– Schließen Sie die LED an, und überprüfen Sie die Funktion Ihres Programms.
Eine Takterzeugung für die LED ist auch mit der SPS möglich. Dazu wird das sog. Taktmerkerbyte verwendet.
Bevor man es jedoch verwenden kann, muss es zuvor in der Hardware aktiviert werden. Die Aktivierung
erfolgt i in den Eigenschaften der CPU (HW-Konfig Baugruppe doppelklicken (z.B. CPU 315) Zyklus /
Taktmerker bei Taktmerker Hacken setzen). Standardmäßig wird dem Merkerbyte die Adresse 100
zugewiesen.
– Jedem Bit des Taktmerkerbytes ist eine feste Periodendauer/Frequenz zugeordnet. Ergänzen Sie in der
Tabelle die fehlenden Werte.
Bit 7 6 5 4 3 2 1 0
Periodendauer (s) 2 1,6 1 0,8 0,5 0,4 0,2 0,1
Frequenz (Hz) 0,5 0,625 1 1,25 2 2,5 5 10

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 77
– Geben Sie das folgende zweizeilige STEP7-Programm ein, und laden Sie es in die CPU.
L MB100
T AB0
– Was bewirkt dieses Programm? Welche Beobachtung können Sie am Ausgang der CPU machen?
Das Programm lädt das in der Hardwarekonfiguration aktivierte Taktmerkerbyte 100 und transferiert
es an das Ausgangsbyte 0. Die acht Bits des Ausgangs blinken in unterschiedlichen Frequenzen.
Teilaufgabe 2.3.2
Warnblinker
Am Robotino® soll die LED mit Hilfe des Taktmerkers der SPS mit einer Frequenz von 1 Hz blinken, sobald
das Netz eingeschaltet ist.
– Wie gehen Sie vor, um dieses Problem zu lösen?
1. Ein Programm in STEP7 schreiben, welches das Taktmerkerbit 5 an den Ausgang transferiert.
2. Programm in die CPU laden
3. In Robotino® View ein Programm erstellen, welches das Taktsignal am digitalen OPC-Eingang
(Taktsignal von der SPS) an den digitalen Ausgang (LED) des Robotino übergibt.
4. Verbindung mit dem OPC-Client und Robotino® herstellen.
5. Starten der SPS und des Robotino® View Programms.

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
78 © Festo Didactic GmbH & Co. KG
– Erstellen Sie ein STEP7-Programm, das ein Ausgangsbit mit der Frequenz 1 Hz blinken lässt.
– Erstellen Sie ein Robotino® Programm, welches das Taktbit der SPS an die LED ausgibt, sobald das Netz
eingeschaltet ist.
Robotino® wird zum Transport angefordert, sobald das Netz eingeschaltet ist und der Reflexlichttaster
(Sensor 1) des Lagers eine Palette meldet.
– Erklären Sie die Funktionsweise des Sensors und beschreiben Sie die Anschlüsse des Reflexlichttasters.
Der Reflexlichttaster arbeitet mit sichtbarem Rotlicht. Befindet sich am Ausgang des Lichtleiters ein
Gegenstand, so wird daran das Rotlicht reflektiert und vom Sensor erkannt.
Der Sensor hat vier Anschlüsse: +24 V; 0 V; Signalleitung weiß (NC); Signalleitung schwarz (NO)
– Schließen Sie die Reflexlichttaster an die SPS an, und überprüfen Sie seine Funktion!
A4.1

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 79
Aufgabe 2.4
Programmieren einer Ablaufsteuerung
Sind die Anforderungsbedingungen erfüllt, soll Robotino® selbständig zum Lager fahren, um dort eine
Palette aufzunehmen. Dazu sind verschiedene Schritte (Unterprogramme) zu programmieren. Bei einer
Steuerung mit einer schrittweisen Abfolge von Aktionen spricht man von Ablaufsteuerungen.
Information
Eine Ablaufsteuerung unterscheidet sich von einer Verknüpfungssteuerung dadurch, dass die Steuerung
zwangsweise in aufeinander folgenden Schritten abläuft. Das Weiterschalten von einem Schritt auf den
programmgemäß festgelegten Folgeschritt ist abhängig von einer sog. "Weiterschaltbedingung"
("Transition").
Für die grafische Darstellung von Ablaufsteuerungen gibt es mehrere Möglichkeiten. Die geläufigsten im
Bereich der Automatisierungstechnik sind zum Einen der Ablaufplan nach IEC 61131-3 sowie die Darstellung
nach GRAFCET (EN 60848).
Das Hauptprogramm in Robotino®View2 stellt einen Ablaufplan nach IEC 61131-3 dar. Machen Sie sich mit
dem Erstellen von Ablaufprogrammen in Robotino®View2 vertraut. Bearbeiten Sie hierfür das Tutorial 2 in
der Hilfe!
Robotino® soll nun die folgenden Funktionen erfüllen:
1. Nach Anforderung (Netz + Sensor1) erfolgt aus der Startposition eine Drehung (90 Grad) nach rechts,
bis die Reflexlichttaster die schwarze Markierung erkennen.
2. Seitwärtsfahrt, bis der mittlere induktive Sensor das Aluband erreicht hat.
3. Bahnverfolgung entlang des Alubands, bis Reflexlichttaster die schwarze Markierung erkannt hat.
4. Vorwärtsfahrt, bis Mikroschalter des Greifers das Lager erkannt hat. Greifer offen? Palette greifen.
5. Rückwärtsfahrt bis zur schwarzen Linie

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
80 © Festo Didactic GmbH & Co. KG
– Ergänzen Sie den Ablaufplan so, dass obige Funktion erfüllt wird. Vergeben Sie hierzu sinnvolle
Unterprogrammnamen und eindeutige Variablen für die Weiterschaltbedingungen.

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 81
– Programmieren Sie die Ablaufsteuerung inklusive der Unterprogramme in Robotino® View!
Testen Sie das Programm!
– Erfüllt es die geforderte Aufgabe? Dann dokumentieren Sie Ihre Lösung!
– Nicht immer erfasst der Greifer von Robotino® das Werkstück sicher. Wie kann gewährleistet werden,
dass das Werkstück auch aufgenommen wurde?
Die Überprüfung, ob das Werkstück wirklich vorhanden ist, erfolgt während der Rückfahrt des
Roboters mit Hilfe des Reflexlichttasters am Greifer. Ist Robotino® an der schwarzen Linie und befindet
sich kein Werkstück im Greifer, so soll er nochmals nach vorne fahren und den Greifvorgang
wiederholen.
– Ergänzen Sie hierfür den obigen Ablaufplan!
– Erstellen Sie die Programme in Robotino® View!
– Testen Sie Ihr erstelltes Programm!

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
82 © Festo Didactic GmbH & Co. KG
Hat Robotino® die Palette sicher, soll er entlang der Alulinie zur Mischanlage fahren.
Nach Ablieferung der Palette soll er in einer Parkposition auf das Signal der SPS warten, dass der Misch- und
Befüllungsvorgang abgeschlossen ist.
Die Parkposition soll wie folgt erreicht werden:
1. Zurück bis zur schwarzen Linie
2. Seitwärts bis zur mittleren induktiven Linie
3. Zurück bis zur mittleren induktiven Linie
– Entwerfen Sie zuerst den Ablaufplan, und programmieren Sie anschließend die geforderten Funktionen
mit Robotino® View.

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 83
Aufgabe 2.5
Mischanlage programmieren und in Betrieb nehmen
Sobald die Palette an der Misch- und Befüllstation abgeliefert wurde, soll automatisch das Befüllen des
Silos erfolgen und anschließend der Mischvorgang gestartet werden.
– Wodurch wird das SPS-Programm für den Befüllvorgang gestartet?
Sobald eine Palette am Lager abgestellt wird, wird dies durch einen Reflexlichttaster erkannt.
Dieses Sensorsignal startet das Mischprogramm der SPS.
Das SPS-Programm zum Befüllen des Silos soll die nachfolgend beschriebene Funktion erfüllen:
Sobald die Palette vom FTS an die Mischanlage geliefert wurde (Sensor 2), soll das Ventil 1 geöffnet
werden.
Es schließt, sobald der Niveauschalter B1 anspricht.
Anschließend öffnet sich das Ventil 2 so lange, bis der Niveauschalter B2 anspricht.
– Programmieren Sie die geforderte Funktion zum Befüllen des Getränkesilos.

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
84 © Festo Didactic GmbH & Co. KG
Das Rührwerk der Mischstation wird mit einem Drehstromasynchronmotor angetrieben. Vor der
Inbetriebnahme des Rührwerks soll überprüft werden, ob der Antrieb für den geplanten Einsatz richtig
dimensioniert ist und die allgemeinen Anforderungen der elektrischen Energieversorgungsunternehmen
eingehalten werden.
Der Drehstrommotor für das Rührwerk hat die folgenden Anschlussdaten:
Pn [kW] 7,5
U [V] 400
IN [A] 15,6
cos φ 0,81
F [Hz] 50
N [min-1] 1450
IA/IN 6,1
m [kg] 91
a) Darf dieser Motor direkt am öffentlichen Netz eingeschaltet werden? Begründen Sie Ihre Antwort!
Nein, da der Anlaufstrom des Motors über 60 A liegt.
IA = 6,1 * 15,6 A = 95,16 A
b) Welche Anlassverfahren gibt es für Kurzschlussläufermotoren?
• Ständeranlassen mit Widerständen
• Anlasstransformator
• Elektronische Sanftanlaufgeräte
• Stern-Dreieck-Anlassverfahren

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 85
c) Ein Drehstromasynchronmotor hat im Klemmkasten sechs Anschlussklemmen. Beim Anschluss an
das elektrische Netz unterscheidet man zwei Grundschaltungen:
Sternschaltung und Dreieckschaltung
– Ergänzen Sie die Gegenüberstellung der beiden Grundschaltungen
Sternschaltung Dreieckschaltung
U = √3 * UStr I = IStr I = √3 * IStr U = UStr
SY = 1/3 * S∆

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
86 © Festo Didactic GmbH & Co. KG
d) Das Stern-Dreieck-Anlassverfahren ist das am häufigsten verwendete Anlassverfahren. Darf der
verwendete Motor mit dem Stern-Dreieck-Anlassverfahren am öffentlichen Netz eingeschaltet
werden?
Begründen Sie Ihre Antwort!
Ja, er darf mit dem Stern-Dreieck-Anlassverfahren eingeschaltet werden. Der Anlassstrom verkleinert
sich um den Faktor √3. Somit ergibt sich ein Anlassstrom von 54,9 A.
e) Welches Drehmoment entwickelt das Rührwerk im Nennbetrieb?
PNenn = (9549 * P) / 1450 min-1
PNenn= 49,39 Nm
f) Das Mischen der Flüssigkeiten erfordert ein Drehmoment von 14 Nm. Überprüfen Sie, ob das
Drehmoment des Rührwerks beim Anlassen durch eine Stern-Dreieck-Schaltung ausreicht.
Begründen Sie Ihre Aussage!
Das Drehmoment des Motors reicht aus.
In der Sternschaltung beträgt das Drehmoment nur 1/3 des Drehmomentes in Dreieckschaltung.
PY = PNenn / 3
PY = 49,39 Nm / 3 = 16,46 Nm
g) Um den Motor vor Überlastung zu schützen, wird ein Motorschutzrelais verwendet.
Auf welchen Strom wird ein Motorschutzrelais richtig eingestellt?
Ein Motorschutzrelais wird auf den Motorbemessungsstrom eingestellt.

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 87
Nach dem Schließen von Ventil 2 des Silos soll das Rührwerk mit einem Stern-Dreieckanlauf gestartet
werden.
– Ergänzen Sie den Schaltplan eines Stern-Dreieckanlaufs.
– Erstellen Sie ein SPS-Programm für den Stern-Dreieckanlauf, welches nach Betätigen eines Tasters das
Sternschütz abschaltet und das Dreieckschütz einschaltet.
Hinweis
Ein Start ist nur möglich, wenn die Anlage auch betriebsbereit ist!

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
88 © Festo Didactic GmbH & Co. KG
Das Umschalten von Stern auf Dreieck soll durch ein SPS-Programm automatisch nach drei Sekunden
erfolgen. Dazu benötigen Sie in Ihrem SPS-Programm sog. Zeitoperationen (Timerbausteine).
– Wie viele verschieden Timer gibt es bei STEP7?
Es gibt fünf verschiedene Timerarten.
– Ergänzen Sie in der Tabelle das Verhalten des jeweils angegeben Timers beim anliegenden
Eingangssignal. Verwenden Sie hierzu die Hilfefunktion in STEP7!
Timerbaustein
Eingangssignal/Ausgangssignal
S_Impuls
S_VIMP
S_EVERZ
S_SEVERZ
S_AVERZ

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 89
Die Angabe der Zeitdauer erfolgt in STEP7 nach einem festgelegten Zeichenformat (Syntax).
– Geben Sie die Syntax für die Angabe der Zeitdauer an und erklären Sie sie.
S5T#aH_bM_cS_dMS
S5 Timerformat H (Stunden), M (Minuten), S (Sekunden), MS (Millisekunden)
a, b, c, d Zeitwerte (werden vom Anwender definiert)
– Erweitern Sie Ihr Programm für den Stern-Dreieckanlauf mit einem passenden Timer so, dass die
Umschaltung automatisch nach drei Sekunden erfolgt.
Lösung siehe Kapitel „Musterlösung SPS“
Befindet sich der Motor des Rührwerks im Dreieckbetrieb, erfolgt 4 Sekunden lang das Mischen des
Getränks. Nach Ablauf der Mischzeit stoppt das Rührwerk, und es öffnet sich das Ablassventil. Nach der
Leerung des Mischtanks (Niveauschalter B0) soll das FTS zur Abholung der Paletten angefordert werden.
– Erweitern Sie Ihr SPS-Programm um die geforderten Funktionen.
Lösung siehe Kapitel „Musterlösung SPS“

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
90 © Festo Didactic GmbH & Co. KG
Aufgabe 2.6
Farberkennung der Paletten
Der Getränkehersteller produziert sein Erfrischungsgetränk für zwei Großkunden. Je nach Kunde haben die
Getränkepaletten unterschiedliche Farben (Händler A = rot und Händler B = schwarz). Das FTS soll die
Getränkepaletten automatisch der Farbe entsprechend in das passende Lager transportieren. Um eine
Farberkennung mit Robotino® durchzuführen, benötigen Sie bei der Programmierung die unten aufgezählten
Funktionsblöcke. Erläutern Sie die Funktion der einzelnen Blöcke. Verwenden Sie hierzu die Hilfe!
– Kamera:
Liefert ein Live-Bild der auf Robotino® montierten Kamera.
– Segmentierer:
Der Segmentierer findet Flächen gleicher Farbe in einem Bild.
– Segment Extrahierer:
Liefert die Position und Größe eines Segmentes in einem zuvor segmentierten Bild.

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 91
– Erstellen Sie ein Unterprogramm in Robotino® View zur Farberkennung der Paletten.
Nach der Deponierung der Palette im entsprechenden Lager soll Robotino® zurück zur Parkposition fahren
und anschließend einen Abstand von 7 cm zur Wand Seitenwand einnehmen. Hat das FTS den
vorgegebenen Wandabstand erreicht, erfolgt eine Drehung von Robotino® um 90 Grad, so dass er sich
wieder in seiner Startposition befindet. Die SPS erhält vom FTS den Befehl, die Anlage abzuschalten
(Netz = AUS).
– Ermitteln Sie den Sensorwert des Abstandsensors bei einem Wandabstand von 7 cm!
Bei einem Wandabstand von 7 cm ergibt sich ein Sensorwert von 1,61 V.
– Erstellen Sie die entsprechenden Unterprogramme.

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
92 © Festo Didactic GmbH & Co. KG
Musterlösung SPS

2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
© Festo Didactic GmbH & Co. KG 93
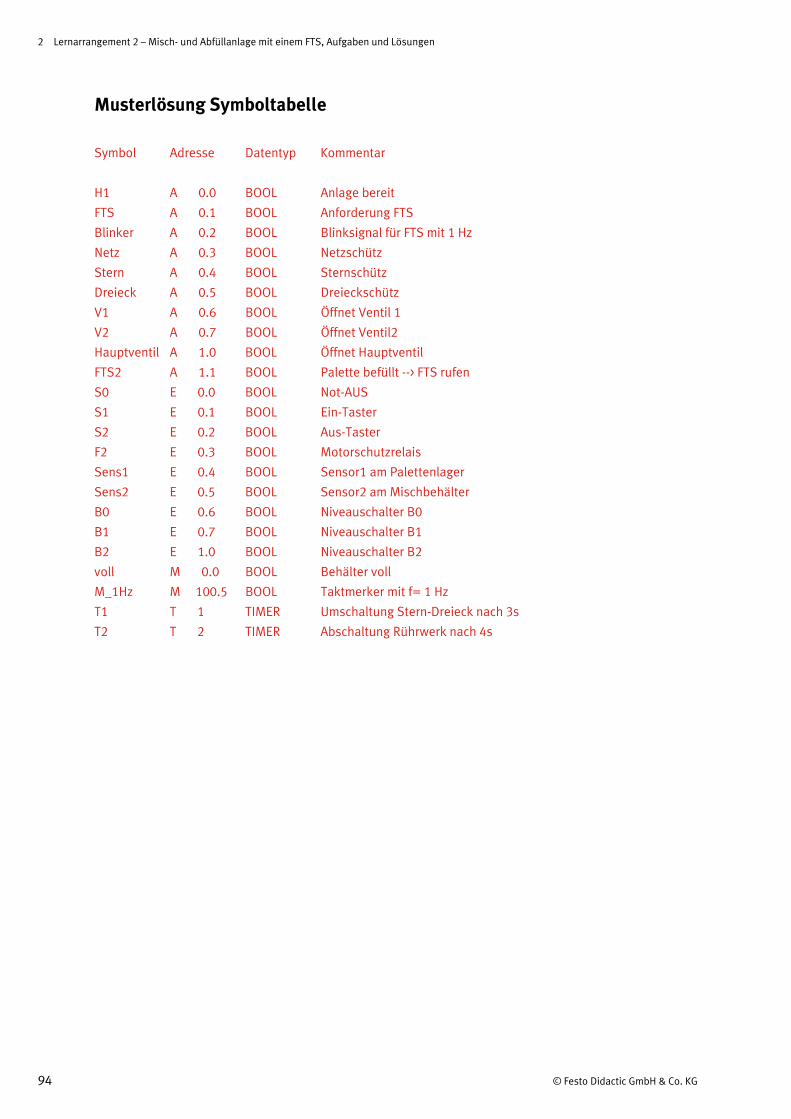
2 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Lösungen
94 © Festo Didactic GmbH & Co. KG
Musterlösung Symboltabelle
Symbol Adresse Datentyp Kommentar
H1 A 0.0 BOOL Anlage bereit
FTS A 0.1 BOOL Anforderung FTS
Blinker A 0.2 BOOL Blinksignal für FTS mit 1 Hz
Netz A 0.3 BOOL Netzschütz
Stern A 0.4 BOOL Sternschütz
Dreieck A 0.5 BOOL Dreieckschütz
V1 A 0.6 BOOL Öffnet Ventil 1
V2 A 0.7 BOOL Öffnet Ventil2
Hauptventil A 1.0 BOOL Öffnet Hauptventil
FTS2 A 1.1 BOOL Palette befüllt --> FTS rufen
S0 E 0.0 BOOL Not-AUS
S1 E 0.1 BOOL Ein-Taster
S2 E 0.2 BOOL Aus-Taster
F2 E 0.3 BOOL Motorschutzrelais
Sens1 E 0.4 BOOL Sensor1 am Palettenlager
Sens2 E 0.5 BOOL Sensor2 am Mischbehälter
B0 E 0.6 BOOL Niveauschalter B0
B1 E 0.7 BOOL Niveauschalter B1
B2 E 1.0 BOOL Niveauschalter B2
voll M 0.0 BOOL Behälter voll
M_1Hz M 100.5 BOOL Taktmerker mit f= 1 Hz
T1 T 1 TIMER Umschaltung Stern-Dreieck nach 3s
T2 T 2 TIMER Abschaltung Rührwerk nach 4s

© Festo Didactic GmbH & Co. KG 1
Robotino® als fahrerloses Transportsystem in einem Lager
Aufgaben und Arbeitsblätter
Lernarrangement 1 – Steuerungen analysieren und anpassen

2 © Festo Didactic GmbH & Co. KG

© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 3
3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem,
Aufgaben und Arbeitsblätter
Aufgabe 1.1
Robotino® in der Kundenpräsentation
Ein Kunde Ihrer Firma benötigt ein System zum Transport von Werkstücken im Lager und möchte hierzu
Robotino® als fahrerloses Transportsystem einsetzen. Bevor er sich jedoch für das System entscheidet,
möchte er von Ihnen eine kurze Präsentation des Systems bezüglich seiner Komponenten und deren
Funktion haben.
– Informieren Sie sich über Aufbau und Funktion von Robotino®!
Damit die Präsentation von Robotino® gut und reibungslos verläuft, sollen Sie die wichtigsten Komponenten
des Systems dokumentieren. Dabei ist jedoch folgendes zu beachten:
In Dokumentationen, Schaltungsunterlagen und elektrischen Anlagen müssen Betriebsmittel eindeutig
gekennzeichnet sein, deshalb werden diese alphanumerisch, d.h. mit Buchstaben und Zahlen bezeichnet.
Der Kennbuchstabe gibt Aufschluss über die Art der Betriebsmittel, z.B. M für Motoren oder P für
Meldeleuchten. Mehrere gleichartige Betriebsmittel haben eine fortlaufende Zählnummer, die dem
Kennbuchstaben nachgestellt ist, z.B. P1, P2 …
– Wo finden Sie die benötigten Informationen über die normgerechte Kennzeichnung von Betriebsmitteln?

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
4 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
– Geben Sie mit Hilfe der Robotino®-Unterlagen und Ihrem Tabellenbuch die gekennzeichneten
Betriebsmittel an und vergeben Sie hierfür den richtigen Kennbuchstaben mit Zählnummer.

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 5

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
6 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Damit Sie für die Präsentation fachlich gut vorbereitet sind, beantworten Sie bitte noch die folgenden
Fragen:
– Wie erfolgt die Energieversorgung von Robotino®
– Wie wird Robotino® angetrieben?
– Welche Funktion hat die Folientastatur und das Display?
– Welche Sensoren sind bei Robotino® integriert?
– Welche Funktion hat das Kamerasystem von Robotino®?

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 7
Alleine mit Fachwissen wird eine Präsentation noch nicht überzeugend und gut.
– Was muss ein Referent bei seiner Präsentation noch beachten, damit sein Vortrag ein Erfolg wird?
– Präsentieren Sie dem Kunden (Teamkollegen) das Robotino® System und beantworten Sie ihm seine
Fragen!
Konnten alle Fragen zur Zufriedenheit des Kunden beantwortet werden?
Wurden die richtigen Fachbegriffe verwendet?
Wurden die Fachbegriffe erklärt?
Bestand Blickkontakt zum Zuhörer?
War die Präsentation überzeugend?
– Was hätte man bei der Präsentation besser machen können?

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
8 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Aufgabe 1.2
Inbetriebnahme von Robotino®
Robotino® ist ein autonomes, mobiles Robotersystem, welches durch seine Steuereinheit, sowie den
Sensoren und Aktoren seine Intelligenz erhält. Er arbeitet, wie jede elektrische Steuerung, nach dem sog.
EVA-Prinzip.
– Informieren Sie sich in Ihrem Fachbuch über das EVA-Prinzip.
– Geben Sie an, wofür die Abkürzung EVA steht und beschreiben Sie kurz mit eigenen Worten die
Bedeutung!
E:
V:
A:
– Lesen Sie im Robotino® Handbuch das Kapitel „Aufbau und Funktion“ durch, und ordnen Sie
anschließend die Baugruppen von Robotino® den jeweiligen Schritten zu!
Eingabe Verarbeitung Ausgabe
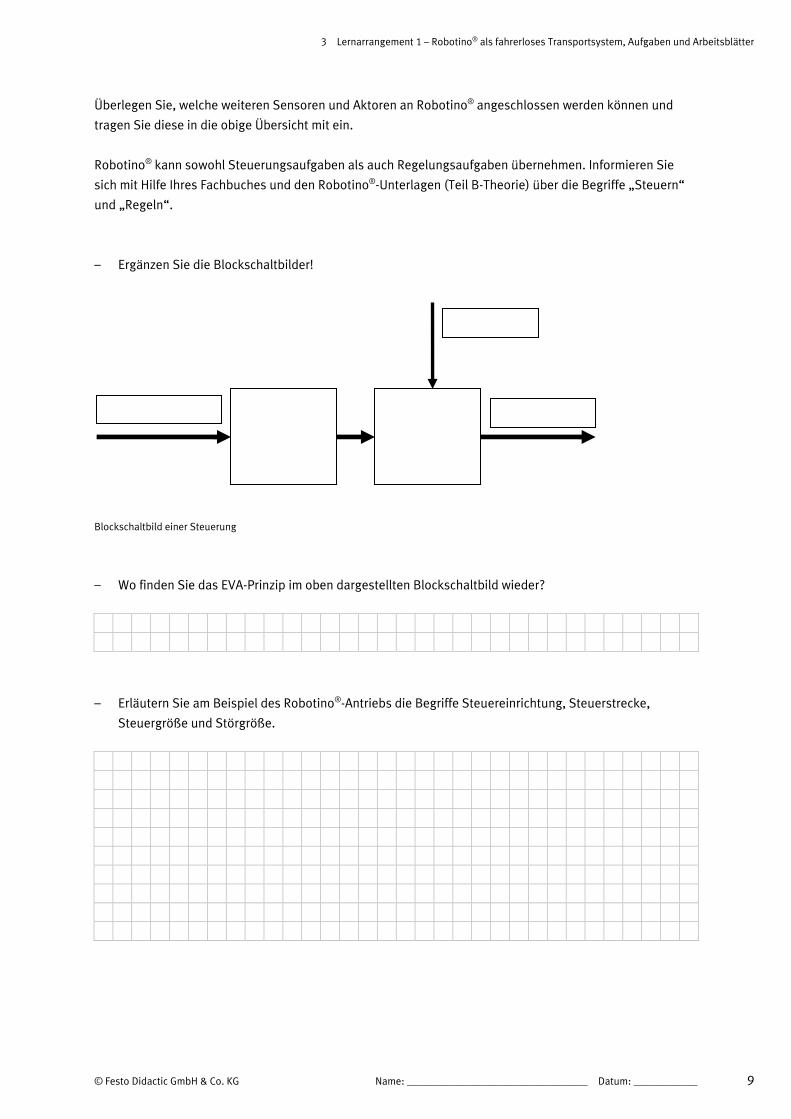
3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 9
Überlegen Sie, welche weiteren Sensoren und Aktoren an Robotino® angeschlossen werden können und
tragen Sie diese in die obige Übersicht mit ein.
Robotino® kann sowohl Steuerungsaufgaben als auch Regelungsaufgaben übernehmen. Informieren Sie
sich mit Hilfe Ihres Fachbuches und den Robotino®-Unterlagen (Teil B-Theorie) über die Begriffe „Steuern“
und „Regeln“.
– Ergänzen Sie die Blockschaltbilder!
Blockschaltbild einer Steuerung
– Wo finden Sie das EVA-Prinzip im oben dargestellten Blockschaltbild wieder?
– Erläutern Sie am Beispiel des Robotino®-Antriebs die Begriffe Steuereinrichtung, Steuerstrecke,
Steuergröße und Störgröße.

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
10 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Blockschaltbild einer Regelung
– Beschreiben Sie in eigenen Worten den wesentlichen Unterschied zwischen einer Steuerung und einer
Regelung!
– Starten Sie das Demoprogramm „Vorwärts“ und beschreiben Sie das Fahrverhalten von Robotino®.
– Stellen Sie nun ein Hindernis (z.B. Systainer) i in den Fahrweg von Robotino®, und beobachten Sie das
Verhalten.
– Handelt es sich bei dem Demoprogramm „Vorwärts“ um eine Steuerung oder um eine Regelung?
Begründen Sie Ihre Antwort!

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 11
Aufgabe 1.3
Erweiterung von Robotino® mit einem Diagnosesystem
Für Robotino® soll eine Erweiterungsschaltung gebaut werden, welche als Diagnosesystem dient. Dieses
Diagnosesystem wird von einem Robotino®-Programm angesteuert (Startcheck). Es hilft, kritische Zustände
zu erkennen und erforderliche Eingaben zu machen.
Die Erweiterung soll einen Schlüsselschalter zum Einschalten von Robotino® und drei Kontrollleuchten (je
einmal rot, gelb, grün) zum Anzeigen der Betriebszustände besitzen sowie einen Taster der nach einem
Not-Halt zum Wiedereinschalten des Roboters dient. Des Weiteren sollen die Betriebsmittel in einem
Gehäuse untergebracht sein, welches gut auf Robotino® zu integrieren ist.
Der Anschluss des Diagnosesystems erfolgt über die E/A-Schnittstelle. An dieser können zusätzliche
Sensoren und Aktoren angeschlossen werden.

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
12 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
– Welche Anschlussmöglichkeiten bietet die E/A-Schnittstelle?
Schaltpläne helfen dem Elektroniker beim Aufbau von Schaltungen und bei der Fehlersuche in Schaltungen.
Damit Sie Schaltpläne richtig zeichnen und lesen können, sollen Sie sich mit den verschiedenen
Darstellungsarten und Normen vertraut machen.
Teilaufgabe 1.3.1
Schaltplanarten
Schaltpläne kann man in zwei Gruppen einteilen:
Die einpolige Darstellung
Hier werden alle Leitungen durch eine Volllinie dargestellt. Somit ist diese Art von Schaltplänen zwar
übersichtlich, jedoch ist die Funktion der Schaltung dabei nicht ersichtlich.

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 13
Die allpolige Darstellung
Hier wird jeder Leiter einzeln gezeichnet. Dadurch ist die Funktion der Schaltung ersichtlich, jedoch kann
eine komplexe Schaltung sehr schnell unübersichtlich werden.
– Ergänzen Sie die Übersicht mit Beispielen von Schaltplänen
Schaltpläne
Einpolige Darstellung
z.B.
Allpolige Darstellung
z.B.

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
14 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Finden Sie mit Hilfe Ihrer Fachbücher und den Robotino®-Unterlagen die Schaltzeichen der folgenden
Betriebsmittel mit den entsprechenden Kennzeichnungen heraus und zeichnen Sie diese normgerecht!
– Beschreiben Sie mit eigenen Worten deren Funktion genauer!
Meldeleuchte:
Drucktaster für Freigabe:
Schlüsselschalter:
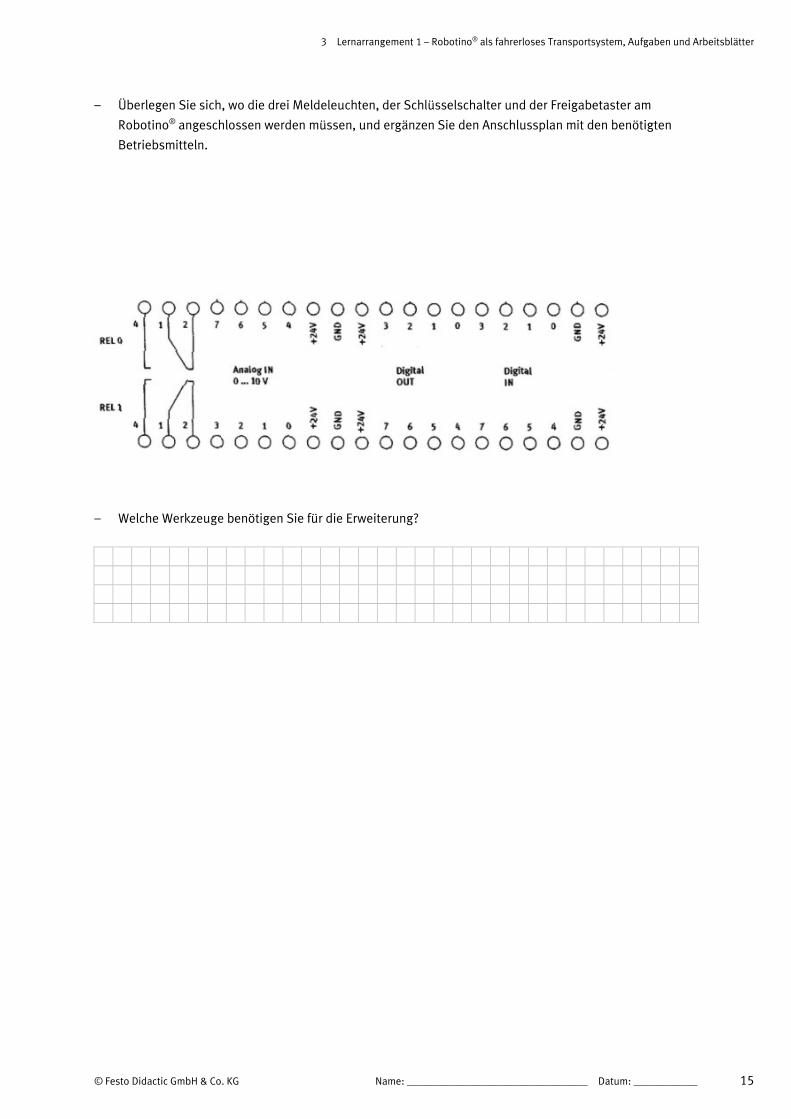
3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 15
– Überlegen Sie sich, wo die drei Meldeleuchten, der Schlüsselschalter und der Freigabetaster am
Robotino® angeschlossen werden müssen, und ergänzen Sie den Anschlussplan mit den benötigten
Betriebsmitteln.
– Welche Werkzeuge benötigen Sie für die Erweiterung?

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
16 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
– Erstellen Sie eine Materialliste für die Erweiterung und kalkulieren Sie mit Hilfe von einschlägigen
Anbietern die Materialkosten.
– Fertigen Sie die Erweiterungsschaltung an!
– Bevor Sie die Erweiterungsschaltung an Robotino® anschließen, überprüfen Sie
die Funktion des Schlüsselschalters und des Tasters mit einem Durchgangsprüfer.

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 17
Aufgabe 1.4
Programmierung eines Startchecks
Für die Diagnosebox von Robotino® soll ein Startcheck programmiert werden, d.h. nur wenn keine Störung
am Robotino® vorliegt, soll er seine Fahrt beginnen.
Damit Sie die folgenden Aufgaben lösen können, müssen Sie sich über die logischen Grundfunktionen
informieren. Es gibt drei Grundverknüpfungen mit denen man jede beliebige Steueraufgabe lösen kann.
– Nennen Sie die drei logischen Grundverknüpfungen!
Teilaufgabe 1.4.1
Sicherheits-Check – Die UND-Verknüpfung (AND)
Beim Startcheck soll eine rote Kontrolllampe leuchten, wenn der Freigabetaster und die Stoßleiste betätigt
sind.
– Zeichnen Sie den Stromlaufplan der UND-Verknüpfung und ergänzen Sie die Wertetabelle sowie das
Zeitablaufdiagramm!

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
18 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
In Funktionsplänen, wie sie z.B. in Robotino® View verwendet werden, wird das sog. Logiksymbol nach
ISO-Darstellung verwendet.
– Zeichnen Sie das Logiksymbol der UND-Verknüpfung normgerecht!
Logiksymbol Funktionsgleichung
– Eine weitere Möglichkeit, logische Funktionen darzustellen, ist die Beschreibung mit Hilfe einer
Gleichung. Schreiben Sie die Gleichung der UND-Verknüpfung neben dem Logiksymbol auf!
– Bauen Sie die Schaltung mit Robotino® View auf, und führen Sie einen Test der Schaltung durch.

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 19
– Erfüllt die Schaltung die geforderte Funktion, dann dokumentieren Sie die Lösung für Ihre Unterlagen.

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
20 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Teilaufgabe 1.4.2
Power-Check – Die ODER-Verknüpfung (OR)
Beim Startcheck soll die gelbe Kontrolllampe leuchten, wenn die Batteriespannung zu niedrig oder der
Strom zu hoch ist.
– Zeichen Sie den Stromlaufplan der ODER-Verknüpfung und ergänzen Sie die Wertetabelle sowie das
Zeitablaufdiagramm!
Zeitablaufdiagramm

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 21
– Zeichnen Sie das Logiksymbol der ODER-Verknüpfung normgerecht!
Logiksymbol Funktionsgleichung
– Eine weitere Möglichkeit, logische Funktionen darzustellen, ist die Beschreibung mit Hilfe einer
Gleichung. Schreiben Sie die Gleichung der ODER-Verknüpfung neben dem Logiksymbol auf!
– Bauen Sie die Schaltung für Umin = 25V und Imax = 1A mit Robotino® View auf, und führen Sie einen Test
der Schaltung durch.
– Dokumentieren Sie Ihre Lösung!

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
22 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Teilaufgabe 1.4.3
Ready-Check – Die NICHT-Verknüpfung (NOT)
Bei der NICHT-Verknüpfung wird das Ausgangssignal invertiert, d.h. es liegt das umgekehrte Eingangssignal
am Ausgang an. Informieren Sie sich über die NICHT-Funktion in Ihrem Fachbuch.
– Zeichnen Sie den Stromlaufplan und ergänzen Sie die Wertetabelle und das Zeitablaufdiagramm.
– Zeichnen Sie das Logiksymbol der NICHT-Verknüpfung normgerecht, und geben Sie die
Funktionsgleichung mit an!
Logiksymbol Funktionsgleichung

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 23
Beim Startcheck soll die grüne Kontrolllampe leuchten, wenn der Schlüsselschalter eingeschaltet ist und
nicht die Freigabetaste und nicht die die Stoßleiste betätigt sind.
– Zeichnen Sie den Stromlaufplan für die geforderte Funktion und stellen Sie die Wertetabelle sowie die
Funktionsgleichung auf!
– Bauen Sie die Schaltung mit Robotino® View auf, und führen Sie einen Test der Schaltung durch.
– Erfüllt die Schaltung die geforderte Funktion, so dokumentieren Sie die Lösung für Ihre Unterlagen.

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
24 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Aufgabe 1.5
Erweiterung des Power-Checks – Das RS-Speicherglied
Die Kontrollschaltung für Strom bzw. Spannungsüberwachung soll verbessert werden.
Wie Sie vielleicht schon festgestellt haben, leuchtet die Kontrolllampe nur so lange, wie der Strom den
eingestellten Wert überschreitet bzw. die Spannung den Wert unterschreitet.
Um mögliche Störungen zu erkennen, soll die Leuchte auch nach nur kurzer Abweichung von den
Normwerten dauerhaft leuchten.
– Wie kann man das erreichen?
Zum Speichern von Signalen können sog. RS-Speicherglieder (Selbsthalterelais) verwendet werden. Im
Folgenden ist das Logiksymbol eines RS-Speichergliedes mit der logischen Funktionsgleichung angegeben.
Logiksymbol
Funktionsgleichung
S
Q1R
1 1 1 2Q ( I Q ) I

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 25
S
R
Q
– Beschreiben Sie die Ein- und Ausgänge des Selbsthalterelais mit Hilfe der Robotino®-Hilfe (Objekt
markieren und Taste F1 drücken)!
Eingänge
S:
R:
Ausgang
Q:
– Ergänzen Sie das folgende Zeitablaufdiagramm!

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
26 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Die Funktion eines RS-Speichergliedes ist vergleichbar mit einer Schützschaltung mit Selbsthaltung.
– Zeichnen Sie den Stromlaufplan einer Selbsthalteschaltung!
– Entwerfen Sie mit Hilfe der logischen Gleichung (s. o.) ein RS-Speicherglied mit UND-, ODER- und NICHT-
Verküpfungen.
Hinweis
Q1 in der Klammer kann wie ein „normaler“ Eingang verwendet werden.

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 27
Erweitern Sie Ihre „Power-Check-Schaltung“ mit einem RS-Baustein so, dass die Kontrollleuchte bei einer
kurzzeitigen Abweichung dauerhaft leuchtet!
– Dokumentieren Sie die Lösung für Ihre Unterlagen.

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
28 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Aufgabe 1.6
Transport von Werkstücken mit Robotino®
Robotino® soll zum Transport von Werkstücken eingesetzt werden. Dabei soll der Roboter folgende
Aufgaben erfüllen:
1. Fahrt vorwärts bis zu einer schwarzen Markierung vor dem Regallager.
2. Stoppen sobald die schwarze Markierung erreicht ist.
3. Seitwärtsfahrt bis Robotino® vor dem Magazin ausgerichtet ist.
4. Fahrt vorwärts bis die Endposition im Magazin erreicht ist.
5. Greifen des Werkstücks.
6. Rückwärtsfahrt bis zu einer induktiven Markierung.
7. Seitwärtsfahrt bis zum nächsten Magazin.
8. Fahrt vorwärts bis die Endposition im Magazin erreicht ist.
9. Werkstück durch Öffnen des Greifers freigeben.
1 2
3 4
5 6
7
8
9

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 29
Teilaufgabe 1.6.1
Lineare Fahrt mit Robotino®
Damit Robotino® diese komplexe Aufgabe des Werkstücktransportes lösen kann, müssen Sie ihn
vorbereiten und „trainieren“. Als erstes soll der Roboter eine einfache Vorwärtsfahrt durchführen.
Schieben Sie Robotino® vorwärts, damit Sie sehen, welche Motoren angesteuert werden müssen. Die
Bezeichnung der Motoren finden Sie in der technischen Dokumentation. Beobachten Sie die Drehrichtung
und Drehgeschwindigkeit der Allseitenräder.
– Welche Motoren müssen angetrieben werden, damit Robotino® vorwärts fährt?
– Erstellen Sie dazu in Robotino® View ein Unterprogramm so, dass Robotino® vorwärts fährt.
Bocken Sie das System auf, so dass die Räder frei bewegbar sind.
Verbinden Sie Robotino® mit dem Netz, und schalten Sie ihn ein.
Starten Sie Robotino® View und stellen Sie eine Verbindung zwischen der Steuerung von Robotino® und
Robotino® View her (siehe technischen Dokumentation).

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
30 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Ziehen Sie in das „Step 1“ Unterprogramm die zwei Motor-Funktionsblöcke Motor #1 und Motor #3
(Funktionsblockbibliothek: Robotino® Antriebssystem-> Motor).
Benennen Sie im Unterprogramm des Motor-Funktionsblocks die Motoren mit „MotorVorneLinks“ und
„MotorVorneRechts“.

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 31
Geben Sie für beide Motoren eine konstante Geschwindigkeit vor.
Fügen Sie dazu dem Unterprogramm zwei Konstanten hinzu (Funktionsblockbibliothek -> Generatoren),
und verbinden Sie diese jeweils mit dem Eingang „Sollgeschwindigkeit“ der beiden Motoren.
Bezeichnen Sie die Konstanten entsprechend mit „DrehzahlLinks“ und „DrehzahlRechts“.
Starten Sie die Anwendung durch Klick auf das Startsymbol. Verändern Sie die Werte der beiden
Konstanten. Beachten Sie, dass die Sollgeschwindigkeit in Umdrehung pro Minute gemessen wird.
Beobachten Sie das Verhalten des Robotersystems sowohl im aufgebockten Zustand als auch im
fahrenden Zustand.
Hinweis
Falls die Motoren „unrund“ laufen und dies die Fahrt des Robotino® beeinträchtigt, prüfen Sie die
Standardeinstellung des PID Motorreglers im Funktionsblockdialog der Motoren:
Kp = 25, Ki = 25, Kd = 25
In der technischen Dokumentation ist festgelegt, dass Robotino® vorwärts fährt, wenn er sich linear in
Blickrichtung der Kamera bewegt.
Wählen Sie die Werte der Konstanten z. B. DrehzahlLinks = -500 [U/min]
DrehzahlRechts = 500 [U/min]
dann fährt Robotino® vorwärts.

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
32 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
– Welche Motoren müssen angetrieben werden, damit Robotino® rückwärts fährt?
– Welche Werte müssen die Konstanten für die Rückwärtsfahrt haben?
– Kontrollieren Sie Ihre Antworten mit Hilfe von Robotino®!

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 33
Teilaufgabe 1.6.2
Kollisionsschutz
Ihr Robotino® fährt nun wie gewünscht vorwärts. Aber was passiert, wenn er mit einem Gegenstand
kollidiert? Damit Robotino® eine Kollision erkennt, hat er um das gesamte Chassis eine Stoßleiste, die als
Kollisionsschutzsensor eingesetzt wird.
Finden Sie mit Hilfe Ihrer Fachbücher das Schaltzeichen einer Sicherheitsleiste (Stoßleiste) mit
entsprechender Kennzeichnung heraus und zeichnen Sie es normgerecht!
– Sicherheitsleiste (Stoßleiste):
– Beschreiben Sie mit eigenen Worten die Funktion der Sicherheitsleiste!
Sicherheitsleisten dienen zur Absicherung von Quetsch- und Scherstellen und schützen somit vor
Verletzungen von Personen und Schäden an Maschinen.
– Nennen Sie mögliche Anwendungsgebiete von Sicherheitsleisten in der Technik!

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
34 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Im Normalfall wird die Sicherheitsleiste praktisch nie betätigt, d.h. die Funktion wird nie überprüft. Tritt nun
im Laufe der Zeit ein Drahtbruch zwischen der Sicherheitsleiste und der Steuerung auf, so würde dieser evtl.
nicht bemerkt werden.
– Wodurch wird ein Kabelbruch an der Sicherheitsleiste von Robotino® erkannt?
Eine weitere Schutzfunktion für Mensch und Maschine stellt die Not-Halt bzw. Not-Aus-Einrichtung dar.
Informieren Sie sich in Ihrem Fachbuch über Not-Aus-Einrichtungen!
– Zeichnen Sie das Schaltzeichen eines Not-Aus-Schalters normgerecht!
– Welche möglichen Formen haben Bedienteile von Not-Aus-Einrichtungen?
– Was muss bei der Entriegelung von Not-Aus-Einrichtungen beachtet werden?
Lesen Sie sich die Hilfe in Robotino® View zur Stoßleiste und zum Motor durch!

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 35
Um das Verhalten der Stoßleiste zu verdeutlichen, soll die folgende Aufgabenstellung gelöst werden:
Ein Motor von Robotino® soll so angesteuert werden, dass er beim Berühren der Stoßleiste stoppt und beim
Loslassen derselben wieder weiterläuft.
– Welche Komponenten benötigen Sie für dieses Steuerungsprogramm?
– Wo muss die Stoßleiste am Motor angeschlossen werden?
– Erstellen Sie bitte ein neues Unterprogramm mit der geforderten Funktion!
Momentan fährt Ihr Robotino® nach Entfernen des Hindernisses weiter.
– Was müsste der Schaltung hinzugefügt werden, damit Robotino® nach dem Berühren der Stoßleiste
nicht mehr weiterfährt?

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
36 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
– Erweitern Sie Ihre Schaltung dementsprechend!
– Wie kann erreicht werden, dass Robotino® nach Beseitigung des Hindernisses wieder weiterfährt?

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 37
Teilaufgabe 1.6.3
Vorwärtsfahrt mit Hilfe des Omniantriebs
Durch unterschiedliche Ansteuerung der drei Antriebsmotoren ergibt sich eine Vielzahl von
Bewegungsmustern für Robotino®. Durch diese große Anzahl von Möglichkeiten ist es recht komplex,
Robotino® zu steuern. Um ihn in eine Richtung zu bewegen, muss die Drehung der einzelnen Räder
koordiniert werden, da nur das korrekte Zusammenspiel die gewünschte Bewegung erzeugt. Mit Hilfe des
Funktionsblocks „Omniantrieb“ kann Robotino® sehr einfach das gewünschte Bewegungsmuster ausführen.
Hinweis
Der Funktionsblock Omniantrieb ist in der Funktionsbibliothek Antriebssystem enthalten.
Es beschreibt ein kinematisches Modell von Robotino®. Die Eingänge auf der „linken“ Seite sind
– Soll-Geschwindigkeit in x-Richtung [mm/s]
– Soll-Geschwindigkeit in y-Richtung [mm/s]
– Soll-Drehgeschwindigkeit in [grad/s]
Das Modul liefert als Ausgänge hierzu die Soll-Drehzahlen in [Umdrehungen pro Minute] für die drei
Motoren.
Das Koordinatensystem ist so gewählt, dass die positive x-Achse mit der Vorwärtsrichtung für Robotino®
übereinstimmt.
– Informieren Sie sich über den Funktionsblock „Omniantrieb“ und das Eingabegerät „Steuerungsfeld“ in
der Hilfe.
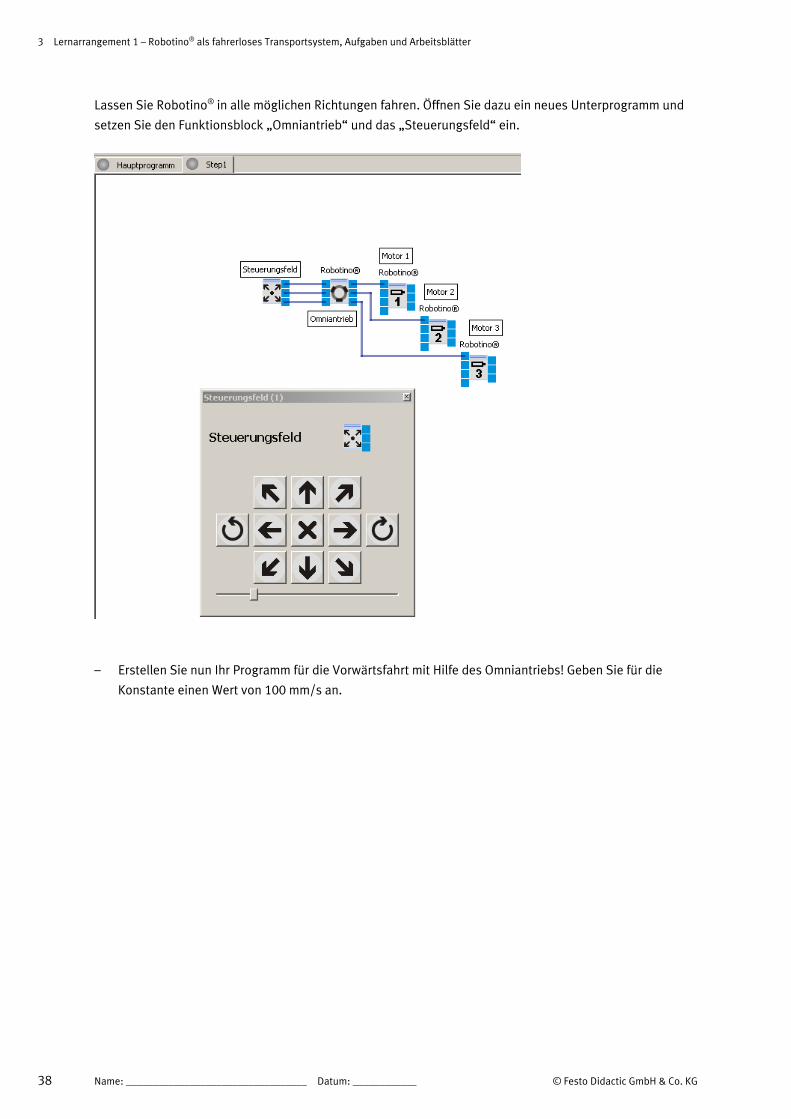
3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
38 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Lassen Sie Robotino® in alle möglichen Richtungen fahren. Öffnen Sie dazu ein neues Unterprogramm und
setzen Sie den Funktionsblock „Omniantrieb“ und das „Steuerungsfeld“ ein.
– Erstellen Sie nun Ihr Programm für die Vorwärtsfahrt mit Hilfe des Omniantriebs! Geben Sie für die
Konstante einen Wert von 100 mm/s an.

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 39
– Speichern Sie Ihr Programm unter dem Namen „Vorwaertsfahrt“ ab, und testen Sie es anschließend.
– Erfüllt Ihr erstelltes Programm die gewünschte Funktion, dann dokumentieren Sie Ihre Lösung.

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
40 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Teilaufgabe 1.6.4
Stoppen an der schwarzen Linie
Nun fährt Robotino® bereits vorwärts. Damit er an der schwarzen Markierungslinie stehen bleibt, benötigt er
einen Sensor der eine schwarze Linie erkennen kann. Hierzu wird ein optischer Näherungssensor verwendet,
der aus einem Licht-Sender und einem Licht-Empfänger besteht.
Informieren Sie sich in den Robotino®-Unterlagen (Teil-B-Theorie) über optische Näherungsschalter und
beantworten Sie anschließend die Fragen!
– Aus welchen grundsätzlichen Hauptbaugruppen bestehen optische Näherungsschalter?
– Erklären Sie die Funktionsweise von optischen Näherungssensoren!
– Wie werden optische Sensoren genannt, deren Sender und Empfänger in einem gemeinsamen Gehäuse
untergebracht sind?
– Wie werden optische Sensoren genannt, deren Sender und Empfänger in getrennten Gehäusen
untergebracht sind?

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 41
– Reflex-Lichttaster können mit sog. Lichtleitervorsätzen montiert werden. Nennen Sie zwei Vorteile, die
sich durch den Einsatz von Lichtleitervorsätzen ergeben!
– Die Übertragung der Lichtsignale erfolgt mit einem Lichtleiter. Wie lautet der englische Begriff für
Lichtleiter?
Die beiden Reflexlichttaster sollen nun an Robotino® installiert werden. Bevor Sie jedoch mit der Montage
beginnen, informieren Sie sich zuerst im Robotino®-Handbuch über den fachgerechten Einbau der Sensoren
und bearbeiten Sie die folgenden Aufgaben.
– Welches Werkzeug bzw. welche Komponenten benötigen Sie zum Einbau der Sensoren?
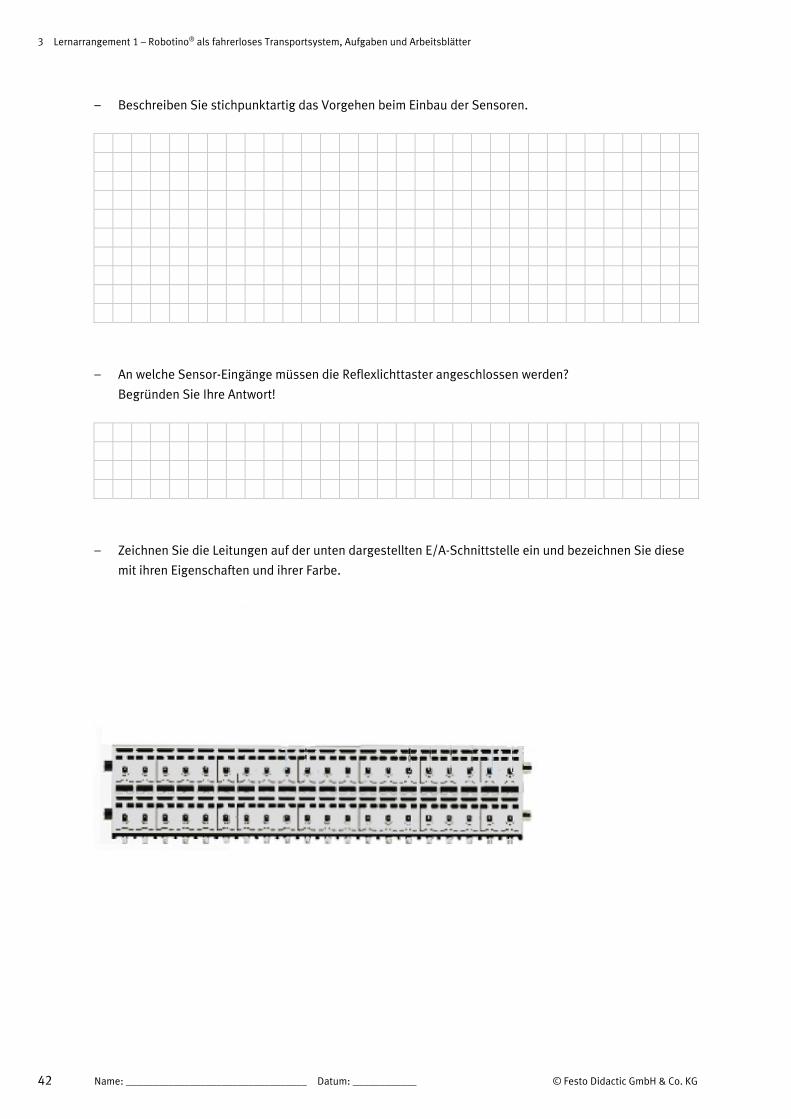
3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
42 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
– Beschreiben Sie stichpunktartig das Vorgehen beim Einbau der Sensoren.
– An welche Sensor-Eingänge müssen die Reflexlichttaster angeschlossen werden?
Begründen Sie Ihre Antwort!
– Zeichnen Sie die Leitungen auf der unten dargestellten E/A-Schnittstelle ein und bezeichnen Sie diese
mit ihren Eigenschaften und ihrer Farbe.

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 43
Montieren Sie beide Reflexlichttaster an den hierfür vorgesehenen Stellen des Chassis, und schließen Sie
die Leitungen gemäß Ihrer obigen Zeichnung an die E/A-Schnittstelle an.
– Justieren Sie die Reflexlichttaster und beschreiben Sie Ihr Vorgehen.
– Tragen Sie in der Grafik alle Eingänge der beiden Reflexlichttaster ein.
Bezeichnen Sie sie mit Ihrer Zugehörigkeit zum Sensor und der Farbe der angeschlossenen Leitungen.

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
44 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Öffnen Sie ein neues Unterprogramm und weisen Sie in Robotino® View die Eingänge entsprechend Ihrer
Vorgabe den einzelnen Eingangs-Funktionsblöcken zu. Bezeichnen Sie die Eingangs-Funktionsblöcke
entsprechend Ihrer Vorgaben.
Um die einwandfreie Funktion der Sensoren zu überprüfen, ermitteln Sie die Sensorwerte für die
unterschiedlichen Eingänge in Robotino® View. Voraussetzung ist, dass Robotino® auf dem später zu
befahrenden Untergrund steht und entsprechend justiert wurde.
– Tragen Sie die Sensorwerte in die untenstehende Tabelle ein.
Eingang Signal
Eingang DI0 (Sensor rechts)
Eingang DI1 (Sensor rechts)
Eingang DI2 (Sensor links)
Eingang DI3 (Sensor links)

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 45
– Bewerten Sie die ermittelten Sensorsignale der Eingänge bezüglich ihrer Schaltfunktion.
– Programmieren Sie Ihren Roboter so, dass er solange vorwärts fährt, bis er die schwarze
Markierungslinie erreicht hat. Dokumentieren Sie Ihre Lösung!

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
46 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Teilaufgabe 1.6.5
Seitwärtsfahrt bis zur Ausrichtung vor dem Magazin
Robotino® soll nun so lange seitwärts fahren, bis er die richtige Position am Magazin erreicht hat.
– Welche Bedingung muss erfüllt sein, damit der Roboter in der richtigen Position stehen bleibt?
– Ergänzen Sie für die Stopp-Bedingung die Funktionstabelle und geben Sie die Funktionsgleichung an!
(1) (2)
– Zeichnen Sie den Funktionsplan!
(1)

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 47
(2)
– Programmieren Sie Robotino® so, dass er in der richtigen Magazinposition stehen bleibt, und
dokumentieren Sie Ihr Programm!

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
48 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Teilaufgabe 1.6.6
Vorwärtsfahrt zur Endposition im Magazin
Damit Robotino® das Werkstück aufnehmen kann, muss er mit einem Greifer nachgerüstet werden.
– Bevor Sie den Greifer montieren, lesen Sie das Informationsblatt „Elektrischer Greifer“ durch und
beantworten Sie die folgenden Fragen.
– Wodurch wird erkannt, dass sich Robotino® in der Endposition am Magazin befindet?
– Positionsschalter werden oft auch als Grenztaster oder Endschalter bezeichnet. Wie lauten die
englischen Begriffe für Grenztaster und Endschalter?
– Zeichnen Sie das Schaltzeichen eines Positionsschalters, und beschriften Sie es normgerecht!
– Bestimmen Sie mit Hilfe eines Durchgangprüfers die Anschlüsse des Positionsschalters.
Hinweis
Achten Sie darauf, ob der Schieber betätigt ist oder nicht!

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 49
– Notieren Sie Ihr Ergebnis im obigen Schaltzeichen.
– Überlegen Sie sich, an welche Eingänge Sie den optischen Sensor bzw. den Positionsschalter
anschließen, und dokumentieren Sie Ihre Anschlussbelegung!
– Befestigen Sie den Greifer am Robotino® und schließen Sie ihn elektrisch an!

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
50 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
– Erstellen Sie ein Programm, das Robotino® stoppt,
sobald er seine Endposition im Magazin erreicht hat.
– Testen Sie, ob Robotino® beim Erreichen der Endposition stoppt.

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 51
Teilaufgabe 1.6.7
Erkennen und Greifen des Werkstücks
Der Greifer von Robotino® soll nur betätigt werden, wenn sich ein Werkstück im Magazin befindet.
– Womit wird ein Werkstück zwischen den Greiferbacken erkannt?
– Wie erfolgt die Auswertung, ob der Greifer geschlossen oder geöffnet ist?
– Erstellen Sie ein Programm, welches nach Erkennen des Werkstückes den Greifer betätigt!
– Testen Sie die Funktion Ihres Programms und dokumentieren Sie Ihre Lösung
wenn die Funktion erfüllt wird!

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
52 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Teilaufgabe 1.6.8
Rückwärtsfahrt bis zu einer induktiven Markierung
Robotino® soll nach Aufnahme des Werkstückes so lange zurückfahren, bis er an einer induktiven
Markierung (Aluminium-Klebeband) angekommen ist.
Informieren Sie sich im Fachbuch und im Robotino®-Handbuch über induktive Sensoren!
– Nennen Sie drei Anwendungsgebiete von induktiven Sensoren!
– Was ist der Unterschied zwischen einem analogen Signal und einem binären Signal?
– Handelt es sich bei dem an Robotino® eingesetzten induktiven Sensor um einen analogen oder einen
digitalen Sensor? Begründen Sie Ihre Antwort!

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 53
– Ermitteln Sie die benötigten Anschlüsse des Sensors entsprechend dem Handbuch, der
Bedienungsanleitung und dem Datenblatt.
Zeichen Sie anschließend die Leitungen auf der unten dargestellten Zeichnung ein, und bezeichnen Sie
sie mit ihren Eigenschaften und ihrer Farbe.
Hinweis
Beachten Sie, dass die E/A-Schnittstelle von Robotino® ausschließlich Spannungswerte verarbeitet!
– Im Datenblatt des induktiven Näherungssensors steht als Schutzart IP 67.
Was sagt diese Angabe aus?
– Beim Einbau des Sensors ist sein Erfassungsbereich von wichtiger Bedeutung. Wie groß ist der
Erfassungsbereich des Sensors?
– Um die Montage des Sensors reibungslos durchzuführen, ist eine vorherige Planung nötig.
Informieren Sie sich, wo der induktive Sensor an Robotino® befestigt werden muss!

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
54 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
– Erstellen Sie bitte einen Arbeitsplan für die Montage sowie die Inbetriebnahme des Sensors, und stellen
Sie eine Material- und Werkzeugliste zusammen.
Arbeitsplan
Arbeitsschritt Benötigte Zeit Erledigt
Benötigte Gesamtzeit:
Benötigtes Material und Werkzeug
Anzahl Werkzeug / Material
– Montieren Sie den Sensor an Robotino®, und schließen Sie ihn elektrisch an!
Führen Sie nach erfolgter Montage des Sensors eine Funktionsprüfung des Sensors durch. Öffnen Sie dazu
ein neues Unterprogramm. Ziehen Sie einen Analogeingang auf die Arbeitsfläche und weisen Sie ihm den
beim Anschluss verwendeten Eingang zu.
Hinweis
Durch die Tastenkombination Strg+D können die Werte des Sensors angezeigt werden.

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 55
Überprüfen Sie die Reaktionsweise des induktiven Sensors bezüglich unterschiedlicher Materialien
(Legierungen) und ermitteln Sie den Zusammenhang zwischen Entfernung und Fläche des Objektes und den
Sensorwerten.
– Verwenden Sie als Prüfobjekte die €-Münzen von 1 Cent bis 2 €. Legen Sie jeweils eine der Münzen auf
dem Untergrund in den Erfassungsbereich des Sensors und tragen Sie die gemessene
Ausgangsspannung (V) in die untenstehende Tabelle ein. Um die Werte für unterschiedliche
Entfernungen zu ermitteln, legen Sie je eine nichtmetallische Unterlage (Papier, Pappe oder Kunststoff)
unter die jeweilige Münze.
Wert Durch
messer
(mm)
Dicke
(mm)
Material magnetisch Ausgangs-
spannung (V)
Ausgangsspannung
(V) mit Unterlage
1 Cent 16,25 1,67 Stahl mit Kupfer-Ummantelung (Fe, Cu) ja
2 Cent 18,75 1,67 Stahl mit Kupfer-Ummantelung ja
5 Cent 21,25 1,67 Stahl mit Kupfer-Ummantelung ja
10 Cent 19,75 1,93 Nordisches Gold (Cu89 Al5 Zn5 Sn1) nein
20 Cent 22,25 2,14 Nordisches Gold (Cu89 Al5 Zn5 Sn1) nein
50 Cent 24,25 2,38 Nordisches Gold (Cu89 Al5 Zn5 Sn1) nein
1 Euro 23,25 2,33 außen: Messing-Ni (Cu75 Zn20 Ni5)
innen: Cu-Ni, Ni, Cu-Ni geschichtet
schwach
2 Euro 25,75 2,20 außen: Cu-Ni (Cu75 Ni25),
innen: Messing-Ni, Ni, Messing-Ni
geschichtet
schwach

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
56 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Beurteilen Sie die ermittelten Werte bezüglich Legierung, Fläche (Größe der Münze) und Entfernung zum
Sensor. Formulieren Sie Ihre Erkenntnis in eine „Je-Desto-Beziehung“!
– Bei gleicher Legierung, gleicher Höhe und unterschiedlicher Größe:
– Bei gleicher Legierung, gleicher Größe und unterschiedlicher Höhe:
– Erweitern Sie Ihr Programm so, dass Robotino® bis zur induktiven Markierung rückwärtsfährt.
Dokumentieren Sie Ihre Lösung!

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 57
Teilaufgabe 1.6.9
Seitwärtsfahrt bis zum nächsten Magazin
Robotino® soll so lange seitwärts fahren, bis er die nächste Position am Magazin erreicht hat.
– Wie kann eine richtige Positionierung von Robotino® vor dem nächsten Magazin erreicht werden?
– Erstellen Sie die Programme für die Positionierung am zweiten Magazin!
– Überprüfen Sie, ob Ihre Programme die geforderte Funktion erfüllen!
– Dokumentieren Sie Ihre Lösungen und speichern Sie Ihre Programme ab!

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
58 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Teilaufgabe 1.6.10
Vorwärtsfahrt zur Endposition im Magazin
Ihr Robotino® befindet sich in der richtigen Position vor dem Magazin. Er muss jetzt so lange vorwärts
fahren, bis er seine Endposition zum Übergeben des Werkstücks erreicht hat.
– Wie erfolgt die Abfrage, dass Robotino® seine Endposition erreicht hat?
– Erstellen Sie ein neues Programm, welches Robotino® so lange vorwärts fahren lässt,
bis er seine Endposition im Magazin erreicht hat.
– Überprüfen Sie, ob Ihre Programme die geforderte Funktion erfüllen!
– Dokumentieren Sie Ihre Lösung und speichern Sie Ihr Programm ab!

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 59
Teilaufgabe 1.6.11
Werkstück durch Öffnen des Greifers freigeben
Wenn die Endposition am Magazin erreicht wurde, muss das Werkstück wieder freigegeben werden.
– Wodurch erfolgt das Öffnen des Greifers von Robotino®?
– Erstellen Sie das Programm zum Öffnen des Greifers!
– Überprüfen Sie, ob Ihre Programme die geforderte Funktion erfüllen!
– Dokumentieren Sie Ihre Lösung und speichern Sie Ihre Lösung ab!

3 Lernarrangement 1 – Robotino® als fahrerloses Transportsystem, Aufgaben und Arbeitsblätter
60 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG

© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 61
Misch- und Abfüllanlage mit Robotino® als FTS
Aufgaben und Arbeitsblätter
Lernarrangement 2 – Steuerungen für Anlagen programmieren und realisieren

62 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG

© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 63
4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS,
Aufgaben und Arbeitsblätter
Aufgabe 2.1
Steuerung analysieren und anpassen
Der Getränkehersteller „Fun & Fresh“ hat ein neues Erfrischungsgetränk entwickelt und möchte dafür eine
moderne Misch- und Abfüllanlage errichten. Dazu soll eine bereits vorhandene verbindungsprogrammierte
Steuerung (VPS) so modifiziert werden, dass die Steuerung der Mischanlage durch eine
speicherprogrammierbare Steuerung (SPS) erfolgt. Die An- und Ablieferung der Getränkepaletten erfolgt
durch ein modernes fahrerloses Transportsystem (FTS) und wird durch Robotino® übernommen. Sie sind bei
der Planung und Errichtung dieser Anlage mit eingebunden und haben von Ihrem Projektleiter eine
Übersicht der einzelnen Teilprojekte in Form eines sogenannten Projektstrukturplans erhalten.
Teilprojekt
„Programmierung“
Teilprojekte „SPS“ Teilprojekte „Robotino“
Anlagen Start
Warnblinker
Stern-Dreieck-Anlauf
Zufuhr Flüssigkeiten
Mischvorgang
leere Palette holen
Warnblinker
Überwachung der Akkuspannung
leere Palette zur Mischanlage
Parkposition 1
volle Palette abholen
Farbkontrolle
Paletten verladen
Parkposition 2
Projekt
„Mischanlage“

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
64 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Schwarze Linie
Induktive Linie
Lagerplatz
Sensor
Getränkelager Händler B
Getränkelager Händler A
Mischanlage Palettenlager Sensor 1

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 65
Technologieschema:
Hauptventil
Ventil Ventil 2
Niveauschalter
Niveauschalter
Niveauschalter B0

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
66 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Das Einschalten der Mischanlage erfolgt mit der folgenden Schützschaltung:
– Die obige Schützsteuerung soll durch eine SPS ersetzt werden. Was ist bei der Umsetzung einer
Schützschaltung in ein SPS-Programm zu beachten?

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 67
SPS-Programme werden mit Hilfe einer Software (z.B. STEP7) auf einem PC erstellt und danach an die SPS
übertragen.
– In welchen Programmiersprachen kann das SPS-Programm dargestellt werden?
– Ergänzen Sie die Übersicht der logischen Grundfunktionen Beispielen der jeweiligen
Programmiersprache.
Grundfunktion Funktionsplan
FUP
Kontaktplan
KOP
Anweisungsliste
AWL
UND
ODER
NICHT

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
68 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Damit Steuerprogramme fehlerfrei und wartungsfreundlich programmiert sind, sollten sie systematisch
entworfen und ausführlich dokumentiert sein.
Bei der Softwareentwicklung hat sich die folgende Vorgehensweise bewährt:
– Beschreiben Sie die Funktion der obigen Schützsteuerung mit eigenen Worten.
Problemanalyse
Entwurf
Realisierung
Inbetriebnahme

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 69
– Erstellen Sie eine Zuordnungstabelle.
Symbol Adresse Datentyp Kommentar

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
70 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
– Entwerfen Sie einen Funktionsplan nur mit den logischen Grundverknüpfungen (UND, ODER, NICHT)
– Sind die obigen Einschaltbedingungen gegeben, so soll das Netzschütz am Ausgang geschaltet werden.

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 71
Aufgabe 2.2
Einschalten der Mischanlage mit einem Taster
Anstatt eines Schalters soll der Start der Anlage mit Hilfe eines Ein-Tasters, und das Stoppen mit Hilfe eines
Aus-Tasters erfolgen
– Ergänzen Sie den Steuerstromkreis einer Schützschaltung mit Selbsthaltung.
Ein Aus Anlage
I 0

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
72 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Schützschaltungen mit Selbsthaltung können in der Digitaltechnik durch ein SR-Flipflop ersetzt werden.
– Überlegen Sie aufgrund der Schützschaltung die Rücksetz- und Setzbedingungen für die Flipflops und
entwickeln Sie so eine Digitalschaltung, die die Schützschaltung ersetzt.

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 73
Aufgabe 2.3
Kommunikation der SPS mit Robotino®
Über eine OPC Schnittstelle (EasyPort) kann die SPS mit Robotino® kommunizieren. Robotino® ist im
Gesamtsystem betrachtet sowohl ein intelligenter Aktor, welcher Befehle von der SPS erhält und diese
selbständig weiterverarbeitet, als auch ein intelligenter Sensor, der analoge und digitale Signale aufbereiten
kann und als Befehl an die SPS weiter gibt.
Damit Sie die OPC-Schnittstelle verwenden können, muss diese zuerst als neues Gerät unterhalb der
Funktionsblockbibliothek über den Button Hinzufügen eingefügt werden.
OPC Client in Funktionsbibliothek einfügen

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
74 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
OPC Client Verbinden
Teilaufgabe 2.3.1
Spannungsüberwachung
Damit man rechtzeitig erkennt, wann die Akkus des FTS zu schwach werden und der Roboter an die
Ladestation muss, ist eine Spannungsüberwachung am Robotino® zu programmieren. Diese soll bei zu
geringer Akkuspannung (UAKKU <= 24 V) eine Warnleuchte am Bedienteil ansteuern.
Ein Aus Anlage
I 0
1. Doppelklick
3. 2.
Akku
4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 75
Ist Robotino® in Bewegung, soll eine Warnleuchte (LED) am Roboter blinken.
– Zur Realisierung einer Blinkfunktion wird der Funktionsblock Arbiträrgenerator verwendet. Welche
Funktion erfüllt ein Arbiträrgenerator? Hinweise dazu finden Sie in der Hilfefunktion!
– Erstellen Sie ein Programm in Robotino® View so, dass eine Leuchtdiode mit der Frequenz
f= 1 Hz blinkt.
Welche Signalform muss für die Blinkfunktion am Arbiträrgenerator eingestellt werden?
– Welche Zeitbasis muss am Arbiträrgenerator eingestellt werden?
– Testen Sie Ihr Programm, indem Sie sich die Werte des Ausgangs durch „STR+D“ anzeigen lassen.
Funktioniert das Programm wie gefordert?

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
76 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
– Bevor Sie die LED am Robotino® anschließen, erstellen Sie einen Anschlussplan.
– Darf die LED direkt am Ausgang betrieben werden? Begründen Sie Ihre Antwort!
– Schließen Sie die LED an, und überprüfen Sie die Funktion Ihres Programms.
Eine Takterzeugung für die LED ist auch mit der SPS möglich. Dazu wird das sog. Taktmerkerbyte verwendet.
Bevor man es jedoch verwenden kann, muss es zuvor in der Hardware aktiviert werden. Die Aktivierung
erfolgt i in den Eigenschaften der CPU (HW-Konfig Baugruppe doppelklicken (z.B. CPU 315) Zyklus /
Taktmerker bei Taktmerker Hacken setzen). Standardmäßig wird dem Merkerbyte die Adresse 100
zugewiesen.
– Jedem Bit des Taktmerkerbytes ist eine feste Periodendauer/Frequenz zugeordnet. Ergänzen Sie in der
Tabelle die fehlenden Werte.
Bit 7 6 5 4 3 2 1 0
Periodendauer (s) 1,6 1 0,5 0,4 0,1
Frequenz (Hz) 0,5 1,25 5

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 77
– Geben Sie das folgende zweizeilige STEP7-Programm ein, und laden Sie es in die CPU.
L MB100
T AB0
– Was bewirkt dieses Programm? Welche Beobachtung können Sie am Ausgang der CPU machen?
Teilaufgabe 2.3.2
Warnblinker
Am Robotino® soll die LED mit Hilfe des Taktmerkers der SPS mit einer Frequenz von 1 Hz blinken, sobald
das Netz eingeschaltet ist.
– Wie gehen Sie vor, um dieses Problem zu lösen?

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
78 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
– Erstellen Sie ein STEP7-Programm, das ein Ausgangsbit mit der Frequenz 1 Hz blinken lässt.
– Erstellen Sie ein Robotino® Programm, welches das Taktbit der SPS an die LED ausgibt, sobald das Netz
eingeschaltet ist.
Robotino® wird zum Transport angefordert, sobald das Netz eingeschaltet ist und der Reflexlichttaster
(Sensor 1) des Lagers eine Palette meldet.
– Erklären Sie die Funktionsweise des Sensors und beschreiben Sie die Anschlüsse des Reflexlichttasters.
– Schließen Sie die Reflexlichttaster an die SPS an, und überprüfen Sie seine Funktion!

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 79
Aufgabe 2.4
Programmieren einer Ablaufsteuerung
Sind die Anforderungsbedingungen erfüllt, soll Robotino® selbständig zum Lager fahren, um dort eine
Palette aufzunehmen. Dazu sind verschiedene Schritte (Unterprogramme) zu programmieren. Bei einer
Steuerung mit einer schrittweisen Abfolge von Aktionen spricht man von Ablaufsteuerungen.
Information
Eine Ablaufsteuerung unterscheidet sich von einer Verknüpfungssteuerung dadurch, dass die Steuerung
zwangsweise in aufeinander folgenden Schritten abläuft. Das Weiterschalten von einem Schritt auf den
programmgemäß festgelegten Folgeschritt ist abhängig von einer sog. "Weiterschaltbedingung"
("Transition").
Für die grafische Darstellung von Ablaufsteuerungen gibt es mehrere Möglichkeiten. Die geläufigsten im
Bereich der Automatisierungstechnik sind zum Einen der Ablaufplan nach IEC 61131-3 sowie die Darstellung
nach GRAFCET (EN 60848).
Das Hauptprogramm in Robotino®View2 stellt einen Ablaufplan nach IEC 61131-3 dar. Machen Sie sich mit
dem Erstellen von Ablaufprogrammen in Robotino®View2 vertraut. Bearbeiten Sie hierfür das Tutorial 2 in
der Hilfe!
Robotino® soll nun die folgenden Funktionen erfüllen:
1. Nach Anforderung (Netz + Sensor1) erfolgt aus der Startposition eine Drehung (90 Grad) nach rechts,
bis die Reflexlichttaster die schwarze Markierung erkennen.
2. Seitwärtsfahrt, bis der mittlere induktive Sensor das Aluband erreicht hat.
3. Bahnverfolgung entlang des Alubands, bis Reflexlichttaster die schwarze Markierung erkannt hat.
4. Vorwärtsfahrt, bis Mikroschalter des Greifers das Lager erkannt hat. Greifer offen? Palette greifen.
5. Rückwärtsfahrt bis zur schwarzen Linie

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
80 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
– Ergänzen Sie den Ablaufplan so, dass obige Funktion erfüllt wird. Vergeben Sie hierzu sinnvolle
Unterprogrammnamen und eindeutige Variablen für die Weiterschaltbedingungen.

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 81
– Programmieren Sie die Ablaufsteuerung inklusive der Unterprogramme in Robotino® View!
Testen Sie das Programm!
– Erfüllt es die geforderte Aufgabe? Dann dokumentieren Sie Ihre Lösung!
– Nicht immer erfasst der Greifer von Robotino® das Werkstück sicher. Wie kann gewährleistet werden,
dass das Werkstück auch aufgenommen wurde?
– Ergänzen Sie hierfür den obigen Ablaufplan!
– Erstellen Sie die Programme in Robotino® View!
– Testen Sie Ihr erstelltes Programm!

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
82 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Hat Robotino® die Palette sicher, soll er entlang der Alulinie zur Mischanlage fahren.
Nach Ablieferung der Palette soll er in einer Parkposition auf das Signal der SPS warten, dass der Misch- und
Befüllungsvorgang abgeschlossen ist.
Die Parkposition soll wie folgt erreicht werden:
1. Zurück bis zur schwarzen Linie
2. Seitwärts bis zur mittleren induktiven Linie
3. Zurück bis zur mittleren induktiven Linie
– Entwerfen Sie zuerst den Ablaufplan, und programmieren Sie anschließend die geforderten Funktionen
mit Robotino® View.

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 83
Aufgabe 2.5
Mischanlage programmieren und in Betrieb nehmen
Sobald die Palette an der Misch- und Befüllstation abgeliefert wurde, soll automatisch das Befüllen des
Silos erfolgen und anschließend der Mischvorgang gestartet werden.
– Wodurch wird das SPS-Programm für den Befüllvorgang gestartet?
Das SPS-Programm zum Befüllen des Silos soll die nachfolgend beschriebene Funktion erfüllen:
Sobald die Palette vom FTS an die Mischanlage geliefert wurde (Sensor 2), soll das Ventil 1 geöffnet
werden.
Es schließt, sobald der Niveauschalter B1 anspricht.
Anschließend öffnet sich das Ventil 2 so lange, bis der Niveauschalter B2 anspricht.
– Programmieren Sie die geforderte Funktion zum Befüllen des Getränkesilos.

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
84 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Das Rührwerk der Mischstation wird mit einem Drehstromasynchronmotor angetrieben. Vor der
Inbetriebnahme des Rührwerks soll überprüft werden, ob der Antrieb für den geplanten Einsatz richtig
dimensioniert ist und die allgemeinen Anforderungen der elektrischen Energieversorgungsunternehmen
eingehalten werden.
Der Drehstrommotor für das Rührwerk hat die folgenden Anschlussdaten:
Pn [kW] 7,5
U [V] 400
IN [A] 15,6
cos φ 0,81
F [Hz] 50
N [min-1] 1450
IA/IN 6,1
m [kg] 91
a) Darf dieser Motor direkt am öffentlichen Netz eingeschaltet werden? Begründen Sie Ihre Antwort!
b) Welche Anlassverfahren gibt es für Kurzschlussläufermotoren?

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 85
c) Ein Drehstromasynchronmotor hat im Klemmkasten sechs Anschlussklemmen. Beim Anschluss an
das elektrische Netz unterscheidet man zwei Grundschaltungen:
Sternschaltung und Dreieckschaltung
– Ergänzen Sie die Gegenüberstellung der beiden Grundschaltungen
Sternschaltung Dreieckschaltung
U = I = I = U =
SY =

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
86 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
d) Das Stern-Dreieck-Anlassverfahren ist das am häufigsten verwendete Anlassverfahren. Darf der
verwendete Motor mit dem Stern-Dreieck-Anlassverfahren am öffentlichen Netz eingeschaltet
werden?
Begründen Sie Ihre Antwort!
e) Welches Drehmoment entwickelt das Rührwerk im Nennbetrieb?
f) Das Mischen der Flüssigkeiten erfordert ein Drehmoment von 14 Nm. Überprüfen Sie, ob das
Drehmoment des Rührwerks beim Anlassen durch eine Stern-Dreieck-Schaltung ausreicht.
Begründen Sie Ihre Aussage!
g) Um den Motor vor Überlastung zu schützen, wird ein Motorschutzrelais verwendet.
Auf welchen Strom wird ein Motorschutzrelais richtig eingestellt?

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 87
Nach dem Schließen von Ventil 2 des Silos soll das Rührwerk mit einem Stern-Dreieckanlauf gestartet
werden.
– Ergänzen Sie den Schaltplan eines Stern-Dreieckanlaufs.
– Erstellen Sie ein SPS-Programm für den Stern-Dreieckanlauf, welches nach Betätigen eines Tasters das
Sternschütz abschaltet und das Dreieckschütz einschaltet.
Hinweis
Ein Start ist nur möglich, wenn die Anlage auch betriebsbereit ist!
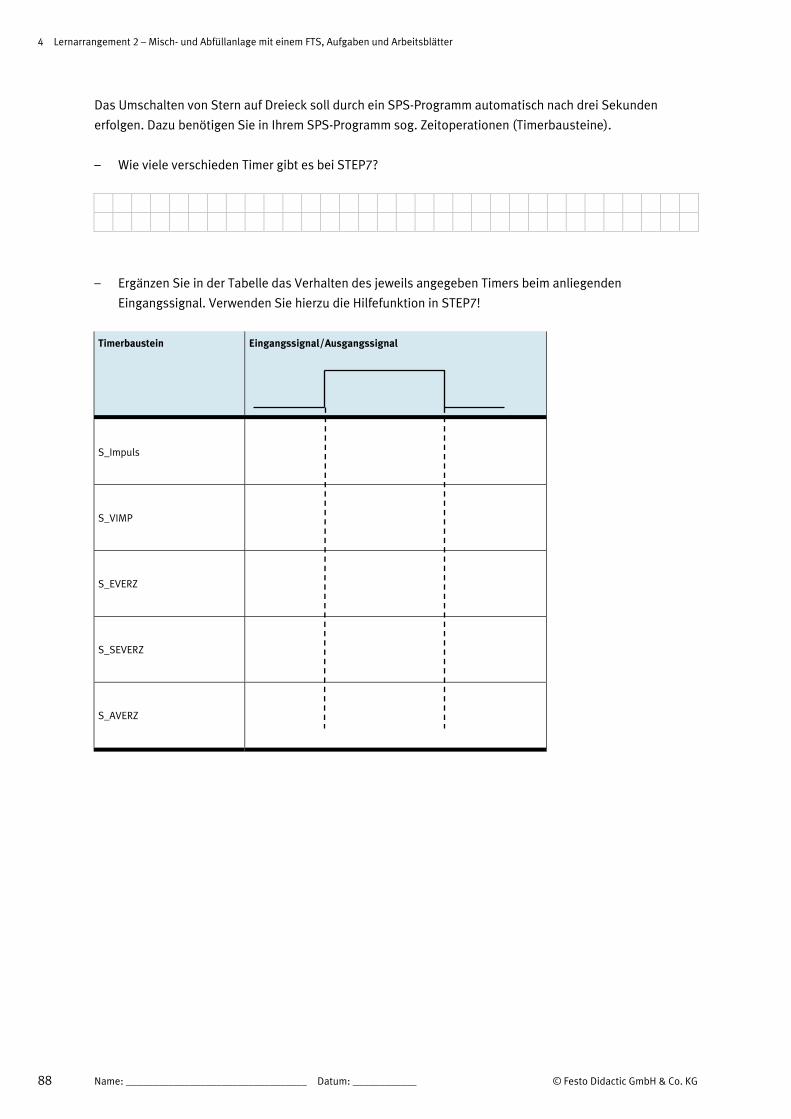
4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
88 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Das Umschalten von Stern auf Dreieck soll durch ein SPS-Programm automatisch nach drei Sekunden
erfolgen. Dazu benötigen Sie in Ihrem SPS-Programm sog. Zeitoperationen (Timerbausteine).
– Wie viele verschieden Timer gibt es bei STEP7?
– Ergänzen Sie in der Tabelle das Verhalten des jeweils angegeben Timers beim anliegenden
Eingangssignal. Verwenden Sie hierzu die Hilfefunktion in STEP7!
Timerbaustein
Eingangssignal/Ausgangssignal
S_Impuls
S_VIMP
S_EVERZ
S_SEVERZ
S_AVERZ

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 89
Die Angabe der Zeitdauer erfolgt in STEP7 nach einem festgelegten Zeichenformat (Syntax).
– Geben Sie die Syntax für die Angabe der Zeitdauer an und erklären Sie sie.
– Erweitern Sie Ihr Programm für den Stern-Dreieckanlauf mit einem passenden Timer so, dass die
Umschaltung automatisch nach drei Sekunden erfolgt.
Befindet sich der Motor des Rührwerks im Dreieckbetrieb, erfolgt 4 Sekunden lang das Mischen des
Getränks. Nach Ablauf der Mischzeit stoppt das Rührwerk, und es öffnet sich das Ablassventil. Nach der
Leerung des Mischtanks (Niveauschalter B0) soll das FTS zur Abholung der Paletten angefordert werden.
– Erweitern Sie Ihr SPS-Programm um die geforderten Funktionen.

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
90 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG
Aufgabe 2.6
Farberkennung der Paletten
Der Getränkehersteller produziert sein Erfrischungsgetränk für zwei Großkunden. Je nach Kunde haben die
Getränkepaletten unterschiedliche Farben (Händler A = rot und Händler B = schwarz). Das FTS soll die
Getränkepaletten automatisch der Farbe entsprechend in das passende Lager transportieren. Um eine
Farberkennung mit Robotino® durchzuführen, benötigen Sie bei der Programmierung die unten aufgezählten
Funktionsblöcke. Erläutern Sie die Funktion der einzelnen Blöcke. Verwenden Sie hierzu die Hilfe!
– Kamera:
– Segmentierer:
– Segment Extrahierer:

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
© Festo Didactic GmbH & Co. KG Name: __________________________________ Datum: ____________ 91
– Erstellen Sie ein Unterprogramm in Robotino® View zur Farberkennung der Paletten.
Nach der Deponierung der Palette im entsprechenden Lager soll Robotino® zurück zur Parkposition fahren
und anschließend einen Abstand von 7 cm zur Wand Seitenwand einnehmen. Hat das FTS den
vorgegebenen Wandabstand erreicht, erfolgt eine Drehung von Robotino® um 90 Grad, so dass er sich
wieder in seiner Startposition befindet. Die SPS erhält vom FTS den Befehl, die Anlage abzuschalten
(Netz = AUS).
– Ermitteln Sie den Sensorwert des Abstandsensors bei einem Wandabstand von 7cm!
– Erstellen Sie die entsprechenden Unterprogramme.

4 Lernarrangement 2 – Misch- und Abfüllanlage mit einem FTS, Aufgaben und Arbeitsblätter
92 Name: __________________________________ Datum: ____________ © Festo Didactic GmbH & Co. KG

© Festo Didactic GmbH & Co. KG I-1
5 Aufbau und Funktion des Gesamtsystems
Für die dargestellten Lernarrangements kommt ein Lernsystem zum Einsatz, dass folgende Teilsysteme
umfasst:
Robotino®
Speicherprogrammierbare Steuerung (SPS)
Plattform
Unterlagen / Lernsoftware
5.1 Robotino®
Im Mittelpunkt des didaktischen Konzeptes zur Umsetzung von Lernsituationen in der
Automatisierungstechnik steht das Lernsystem Robotino® der Firma Festo Didactic.
Es besteht in der Grundausstattung aus den drei Komponenten:
Hardware
Software
Arbeitsbuch
Robotino® repräsentiert ein mobiles, autonomes, automatisierungstechnisches System. Eine große Stärke
ist, dass es außerhalb dafür eingerichteter Spezialräume (integrierte Fachunterrichtsräume für
Automatisierungstechnik) z.B. in jedem Klassenzimmer eingesetzt werden kann. Zur Anwendung kommen
hierbei sowohl Komponenten, wie sie in der Industrie Verwendung finden als auch original Datenblätter und
Unterlagen der Hersteller.
Robotino® ist für die komplexen und vielschichtigen Aufgaben – wie sie im heutigen Alltag und Berufsleben
auftreten – einsetzbar. Der mobile Roboter lässt sich dazu mit ergänzender Hardware ausstatten. Durch die
Montage eines elektrischen Greifers wird Robotino® zu einem fahrerlosen Transportsystem, das Werkstücke
aufnehmen, transportieren und an einer Plattform abgeben kann. Werkstücke zwischen den Greiferbacken
detektiert eine Lichtschranke. Die Endposition von Robotino® an der Plattform erkennt ein Mikroschalter.
Zur Ausrichtung und Orientierung des Roboters in seiner Umgebung sind an der Grundausstattung des
mobilen Systems noch zusätzliche mitgelieferte Sensoren zu befestigen und elektrisch anzuschließen
(Übersicht 5.1). Mit Hilfe von induktiven und optischen Sensoren, welche industriellen Standards
entsprechen, kann Robotino® Linien und Markierungen auf dem Fahrbahngrund erkennen und sich
punktgenau positionieren.
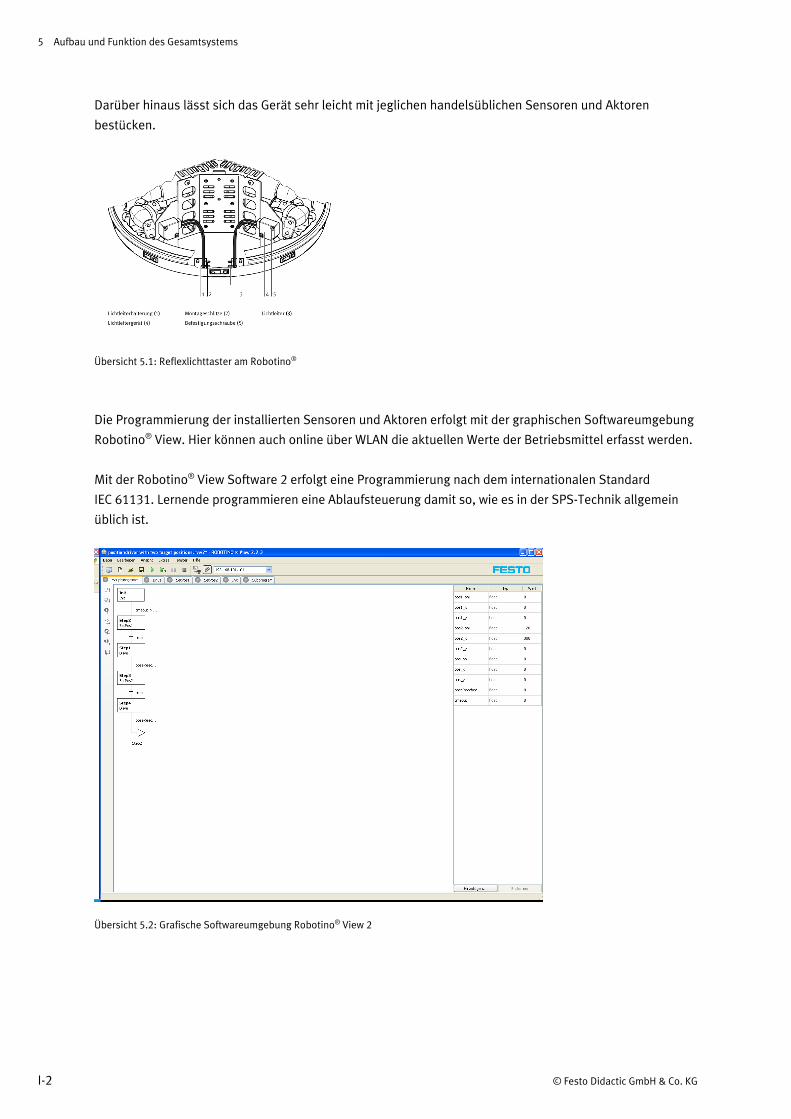
5 Aufbau und Funktion des Gesamtsystems
I-2 © Festo Didactic GmbH & Co. KG
Darüber hinaus lässt sich das Gerät sehr leicht mit jeglichen handelsüblichen Sensoren und Aktoren
bestücken.
Übersicht 5.1: Reflexlichttaster am Robotino®
Die Programmierung der installierten Sensoren und Aktoren erfolgt mit der graphischen Softwareumgebung
Robotino® View. Hier können auch online über WLAN die aktuellen Werte der Betriebsmittel erfasst werden.
Mit der Robotino® View Software 2 erfolgt eine Programmierung nach dem internationalen Standard
IEC 61131. Lernende programmieren eine Ablaufsteuerung damit so, wie es in der SPS-Technik allgemein
üblich ist.
Übersicht 5.2: Grafische Softwareumgebung Robotino® View 2

5 Aufbau und Funktion des Gesamtsystems
© Festo Didactic GmbH & Co. KG I-3
Ein Vorteil des Lernsystems ist es, dass Programmänderungen in Robotino® View sofort auf Robotino®
übertragen werden. Ein Kompilieren und Laden des Programms in den Speicher des Roboters ist nicht nötig.
Somit kann der Lernende das neue Programm im laufenden Betrieb austesten und etwaige Programmfehler
sofort beheben.
Übersicht 5.3: Die Kommunikation von Robotino® und PC erfolgt über WLAN
Robotino® ist ein flexibles und portables Lernsystem, das in einem Systainer verstaut ist und damit leicht
transportiert werden kann. Der Einsatz ist dadurch in jedem Klassenzimmer problemlos möglich. Ein
integrierter Fachunterrichtsraum (IFU) ist für den Lernfeldunterricht mit Robotino® nicht erforderlich.
Robotino® besitzt einen eigenen WLAN Server. Darüber lässt sich direkt mit dem PC eine WLAN Verbindung
herstellen.
WLAN

5 Aufbau und Funktion des Gesamtsystems
I-4 © Festo Didactic GmbH & Co. KG
5.2 Speicherprogrammierbare Steuerung (SPS)
Mit dem vielseitigen Lernsystem Robotino® lässt sich ein großes fachliches Spektrum im Lerngebiet
Automatisierungstechnik abdecken. Durch eine Vernetzung des Robotersystems mit einer
Speicherprogrammierbaren Steuerung (SPS) zu einem automatisierten Gesamtsystem erschließen sich
darüber hinaus eine Vielzahl weiterer Anwendungsmöglichkeiten im Unterricht an beruflichen Schulen. Der
vernetzte Einsatz der hier dargestellten Lernsituationen empfiehlt sich dabei vor allem für den Unterricht in
den Fachstufen der Berufsschule.
Eine Speicherprogrammierte Steuerung (SPS) ist heute ein wesentlicher Bestandteil in automatisierten
Anlagen. Neben digitalen Signalen können auch analoge Signale verarbeitet werden. Die SPS ist die zentrale
Funktionseinheit, über die automatisierte Prozesse gesteuert werden. Sie besteht im Regelfall aus einer
Stromversorgungsbaugruppe (z.B. PS307), der Zentralbaugruppe (z.B. CPU 315-2DP) und
Signalbaugruppen für digitale und analoge Ein- und Ausgänge (z.B. SM321, SM322, SM334). Die einzelnen
Baugruppen sind auf einer Profilschiene befestigt und werden über Busverbinder verbunden, die in der
Gehäuserückwand stecken.
Über eine OPC - Schnittstelle (EasyPort) kann die SPS mit Robotino® kommunizieren. Robotino® ist im
Gesamtsystem betrachtet sowohl ein intelligenter Aktor, welcher Befehle von der SPS erhält und diese
selbständig weiterverarbeitet, als auch ein intelligenter Sensor, der analoge und digitale Signale aufbereiten
kann und als Befehl an die SPS weiter gibt.
Übersicht 5.4: Kommunikationen über eine OPC-Schnittstelle
(OPC = Object linking and embedding for Process Control)

5 Aufbau und Funktion des Gesamtsystems
© Festo Didactic GmbH & Co. KG I-5
Das SPS-Programm wird auf einem PC mit der Software STEP 7 erstellt und anschließend über die
MPI-Schittstelle (MPI = Multi Point Interface) in den Speicher der SPS geladen. Im Gegensatz zu Robotino®
muss nach jeder Änderung des SPS-Programms das modifizierte Programm neu in den SPS-Speicher
geladen werden.
5.3 Mobile Arbeitsplattform
Die Plattform stellt ein Lagersystem dar, welches durch Robotino® be- und entladen wird. Die Plattform ist
mit zwei Flachlagern ausgestattet, die sich mit zylinderförmigen Werkstücken bestücken lassen. Durch
weitere Sensoren an den Lagerplätzen erschließen sich zusätzliche Möglichkeiten zum Einsatz in
komplexeren Lernsituationen.
Die Zufahrtswege auf der Plattform sind mit Aluminium-Klebeband für die induktiven Sensoren und mit
farbigen Markierungen für die optischen Sensoren versehen. Dadurch ist eine punktgenaue Positionierung
des Robotino®-Greifers zum Werkstück möglich. Die Plattform eignet sich sehr gut für den Einsatz auf einem
Tisch, wodurch ein ergonomisches Arbeiten möglich ist. Eine Begrenzung der Platte verhindert einen
ungewollten Absturz von Robotino® bei einer Fehlprogrammierung durch die Schüler.
Übersicht 5.5: Flachlager mit Reflexlichttaster

5 Aufbau und Funktion des Gesamtsystems
I-6 © Festo Didactic GmbH & Co. KG
5.4 Unterlagen/Lernsoftware
Die ausgearbeiteten Lernarrangements greifen zwei konkrete betriebliche Beispiele auf. Sie zeigen
exemplarisch Umsetzungsmöglichkeiten für den Einsatz des Roboters im Berufsschulunterricht. In
Lernarrangement 1 lernen Schüler zuerst Robotino® kennen und setzen ihn anschließend zum Transport von
Werkstücken ein. Dabei lernen sie Grundlagen der Steuerungstechnik. In Lernarrangement 2 kommuniziert
Robotino® mit einer SPS und wird somit zu einem intelligenten Sensor in einer komplexen Steuerung einer
Mischanlage.
Der Einsatz von Robotino® mit den vorliegenden Unterlagen im handlungsorientierten Unterricht ermöglicht
bei den Auszubildenden einen individuellen Lernprozess. D.h. Lernende bestimmen ihre
Lerngeschwindigkeit durch eigenständiges Bearbeiten der Aufgaben selbst und sind nicht abhängig vom
Tempo der Lehrkraft oder der Mitschüler. Somit können die Auszubildenden gemäß ihrer individuellen Lern-
und Aufnahmefähigkeit gefördert und gefordert werden.
Durch die Teamarbeit ist der Klassenverband größtenteils aufgelöst, wodurch eine kooperative und
kommunikative Lernsituation entsteht. Die gemeinsame Bearbeitung der Aufgaben zielt dabei nicht nur auf
die Vermittlung von Fachwissen, sondern auch auf übergeordnete Lernziele wie soziale und personale
Kompetenz.
Das Lernsystem Robotino® umfasst weiter ein Arbeitsbuch mit Lösungen, das elf unterschiedliche Projekte
enthält. Jedes Projekt behandelt unterschiedliche Themenschwerpunkte wie z.B.: Positionierung des
Roboters, Bahnverfolgung mit Reflexlichttaster oder induktivem Sensor, Regelung usw.
Obwohl die jeweiligen Aufgabenstellungen handlungsorientierte Grundzüge haben und teilweise an
Lernfelder anknüpfen, weisen sie eher eine fachsystematische Grundorientierung auf. Aufgrund der
Gestaltung des Arbeitsbuches ist sein direkter und nicht von der Lehrkraft didaktisch aufbereiteter Einsatz
im Berufsschulunterricht nur bedingt möglich. Es ist jedoch sehr gut zur inneren Differenzierung geeignet.
Leistungsstarken Schülern stehen im Arbeitsbuch vertiefende Projektaufgaben zu verschiedenen Themen
zur Verfügung. Eine mögliche Zuordnung der Lernsituationen zu den Projekten ist auf der folgenden Seite
dargestellt.
Aufgrund der eher fachsystematischen Gliederung ist das Arbeitsbuch für die Lehrkraft eine ideale
Arbeitsgrundlage um sich das Lernsystem Robotino® im Selbststudium zu erschließen. Es bietet einen
Fundus für Aufgabenstellungen und damit verbundene Lerninhalte, die sich für den Unterricht weiter
aufbereiten lassen. Der Einsatz ist aber auch unmittelbar im Unterricht von Technikerschulen,
allgemeinbildenden Schulen (Berufsoberschulen, technischen Gymnasien) oder in Wahlfächern an
Berufsschulen denkbar.

5 Aufbau und Funktion des Gesamtsystems
© Festo Didactic GmbH & Co. KG I-7
5.5 Zuordnung der Lernsituationen zu den Projektaufgaben
Lernarrangement 1 Projekt im Arbeitsbuch
Robotino® in der Kundenpräsentation Projekt 1: Wareneingangsprüfung und Inbetriebnahme von
Robotino®
Inbetriebnahme von Robotino® Projekt 1: Wareneingangsprüfung und Inbetriebnahme von
Robotino®
Erweiterung von Robotino® mit einem Diagnosesystem
Programmierung eines Startchecks
Erweiterung des Power-Checks – Das RS-Speicherglied
Transport von Werkstücken mit Robotino®
Fahrt vorwärts Projekt 2: Ein mobiles Robotersystem in beliebige Richtungen
linear verfahren
Kollisionsschutz
Vorwärtsfahrt mit Hilfe des Omniantriebs Projekt 2: Ein mobiles Robotersystem in beliebige Richtungen
linear verfahren
Stoppen an der schwarzen Linie Projekt 4: Bahnverfolgung eines fahrerlosen Transportsystems
mit zwei Reflexlichttastern
Seitwärtsfahrt bis zur Ausrichtung vor dem Magazin Projekt 4: Bahnverfolgung eines fahrerlosen Transportsystems
mit zwei Reflexlichttastern
Vorwärtsfahrt zur Endposition im Magazin
Erkennen und Greifen des Werkstücks
Rückwärtsfahrt bis zu einer induktiven Markierung Projekt 8: Bahnverfolgung eines fahrerlosen Transportsystems
mit einem analogen induktiven Sensor
Seitwärtsfahrt bis zum nächsten Magazin Projekt 4: Bahnverfolgung eines fahrerlosen Transportsystems
mit zwei Reflexlichttastern
Vorwärtsfahrt zur Endposition im Magazin
Werkstück durch Öffnen des Greifers freigeben
Übersicht 5.6: Zuordnung der Lernsituationen zu den Projektaufgaben

5 Aufbau und Funktion des Gesamtsystems
I-8 © Festo Didactic GmbH & Co. KG
Lernarrangement 2 Projekt im Arbeitsbuch
Anfahren des Lagers Projekt 4: Bahnverfolgung eines fahrerlosen Transportsystems
mit zwei Reflexlichttastern
Projekt 8: Bahnverfolgung eines fahrerlosen Transportsystems
mit einem analogen induktiven Sensor
Farberkennung der Palette Projekt 10: Bahnverfolgung eines fahrerlosen Transportsystems
mit Hilfe der Webcam
Projekt 11: Suchen eines farbigen Objektes und Annähern an
diese mit Hilfe der Webcam
Regelung des Wandabstandes Projekt 5: Abstandsgenaues Anfahren einer Beladestation
Projekt 6: Hindernis anfahren und definierten Abstand halten
Übersicht 5.7: Zuordnung der Lernsituationen zu den Projektaufgaben
Neben den klassischen gedruckten Informationen (Schulbücher, Handreichungen, Datenblätter, etc.) bietet
sich der Einsatz von interaktiver und multimedialer Software im Unterricht an. Hierzu gibt es von Festo
Didactic eine große Anzahl von Lernprogrammen mit fachsystematisch aufbereiteten Lerninhalten. Neben
der lernintendierten Informationsbeschaffung bieten diese Programme die Möglichkeit, den Lernfortschritt
durch Kontrollfragen zu überprüfen. Mit dem wohl dosierten Einsatz dieser multimedialen Software lässt
sich der Unterricht, auch wenn solche Programme weder das Unterrichtsgespräch mit der Lehrkraft oder den
Mitschülern ersetzen können oder wollen, abwechslungsreich gestalten.
Folgende E-Learning-Angebote eignen sich dabei zur Informationsbeschaffung sowie zur Ergänzung bzw.
Vertiefung von Lerninhalten:
Elektrik 1 (Stromkreis allgemein)
Elektronik 1 (Halbleitertechnik z.B. Dioden)
Elektronik 2 (Signalarten und Grundlagen von Digitalbausteinen)
Sensorik 1 (Sensoren zur Endlageerkennung)
Sensorik 2 (Sensoren zur Objekterkennung)
Aktoren-Gleichstrommotor (Gleichstrommotor als Aktor)
Steuern und Regeln (Steuern und Regeln in der Automatisierungstechnik
LOGO! Training (Logische Grundfunktionen)
GRAFCET (Ablaufbeschreibung mit Hilfe von GRAFCET)

© Festo Didactic GmbH & Co. KG I-9
6 Einsatz der ausgearbeiteten Lernarrangements im Unterricht
6.1 Mögliche Einsatzbereiche der Lernarrangements bei Elektronikern
Das Lernsystem Robotino® besitzt ein sehr hohes Lernpotenzial und ist je nach Zielgruppe äußerst variabel
einsetzbar. Dafür bedarf es im Unterricht eines didaktisch reflektierten und adressatengerechten
Vermittlungskonzeptes.
Das Lernarrangement 1 „Robotino® als fahrerloses Transportsystem“ ist zur Heranführung an das
Lernsystem Robotino® einschließlich der damit verbundenen Einführung in die Grundlagen der
Steuerungstechnik konzipiert. Der Einsatz erfolgt im Berufsgrundbildungsjahr im Lernfeld „Steuerungen
analysieren und anpassen“. Im Hinblick auf die berufliche Relevanz für die Auszubildenden eignet sich
Robotino® besonders für die industriellen Elektroberufe. Für leistungsstarke Schüler aus Berufen des
Elektrohandwerks lässt sich das Lernsystem z.B. in einem entsprechenden Wahlfach einsetzen.
Aus dem Lernfeld „Steuerungen analysieren und Anpassen“ des Rahmenlehrplans der KMK zum Berufsfeld
Elektrotechnik (2003, S. 11) lassen sich nahezu alle Zielformulierungen umsetzen. Lediglich die
Formulierung zur Unterscheidung von Techniken zur Realisierung von Steuerungen und der Bewertung von
Vor- und Nachteilen auch unter ökonomischen und sicherheitstechnischen Aspekten findet sich nur bedingt
in den beiden dargestellten Lernarrangements wieder. Von den Inhalten dieses Lernfeldes können bis auf
die verbindungsprogrammierte Signalverarbeitung mit dem Lernarrangement 1 zum Analysieren und
Anpassen von Steuerungen alle Inhalte abgedeckt werden.
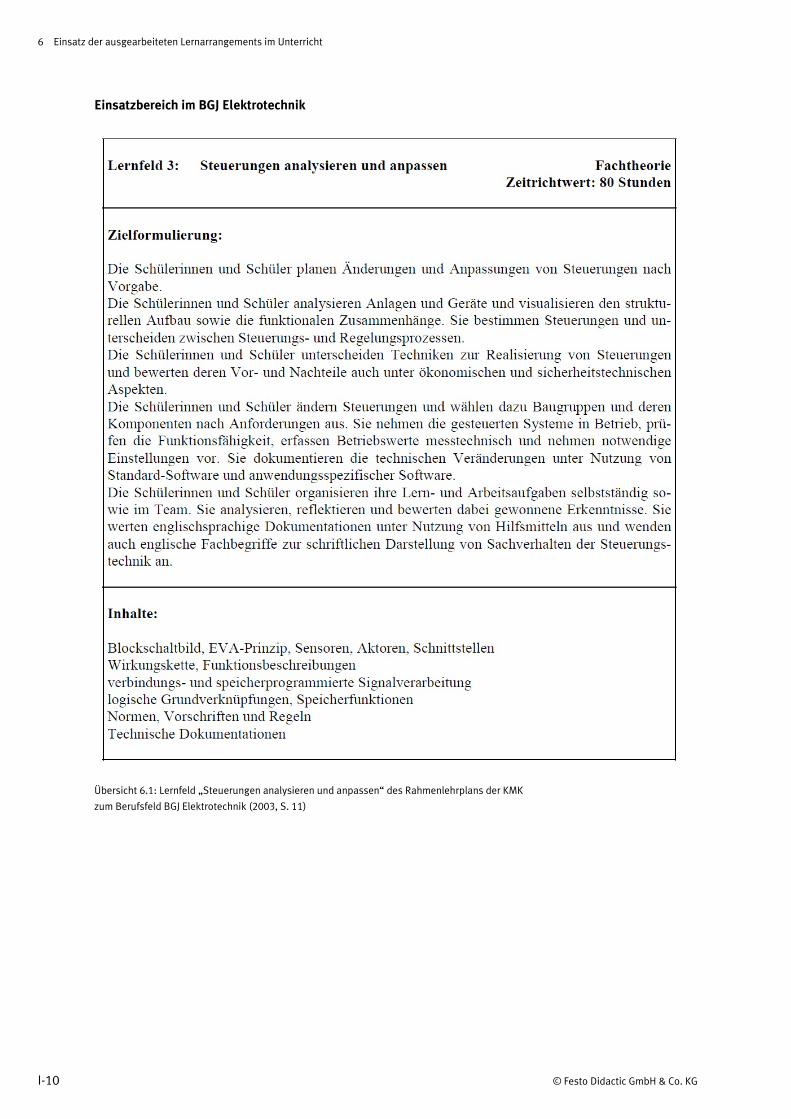
6 Einsatz der ausgearbeiteten Lernarrangements im Unterricht
I-10 © Festo Didactic GmbH & Co. KG
Einsatzbereich im BGJ Elektrotechnik
Übersicht 6.1: Lernfeld „Steuerungen analysieren und anpassen“ des Rahmenlehrplans der KMK
zum Berufsfeld BGJ Elektrotechnik (2003, S. 11)

6 Einsatz der ausgearbeiteten Lernarrangements im Unterricht
© Festo Didactic GmbH & Co. KG I-11
Das gegenüber Lernarrangement 1 komplexere Lernarrangement 2 „Misch- und Abfüllanlage mit einem FTS“
kann in den Fachklassen unterschiedlicher Elektroberufe eingesetzt werden. Die folgenden Übersichten
geben einen Überblick über die möglichen Einsatzbereiche zu verschiedenen Lernfeldern aus
unterschiedlichen Ausbildungsberufen. In den Übersichten sind die jeweiligen Zielformulierungen und
Lerninhalte aus den zugrundeliegenden Lernfeldern der KMK abgebildet.
Mögliche Einsatzbereiche des Lernarrangements 2 „Misch- und Abfüllanlage mit einem FTS“ im
Ausbildungsberuf Elektroniker für Geräte und Systeme:
Übersicht 6.2: Lernfeld „Fertigungsanlagen einrichten“ des Rahmenlehrplans der KMK für den Ausbildungsberuf
Elektroniker für Geräte und Systeme (2003, S. 18)
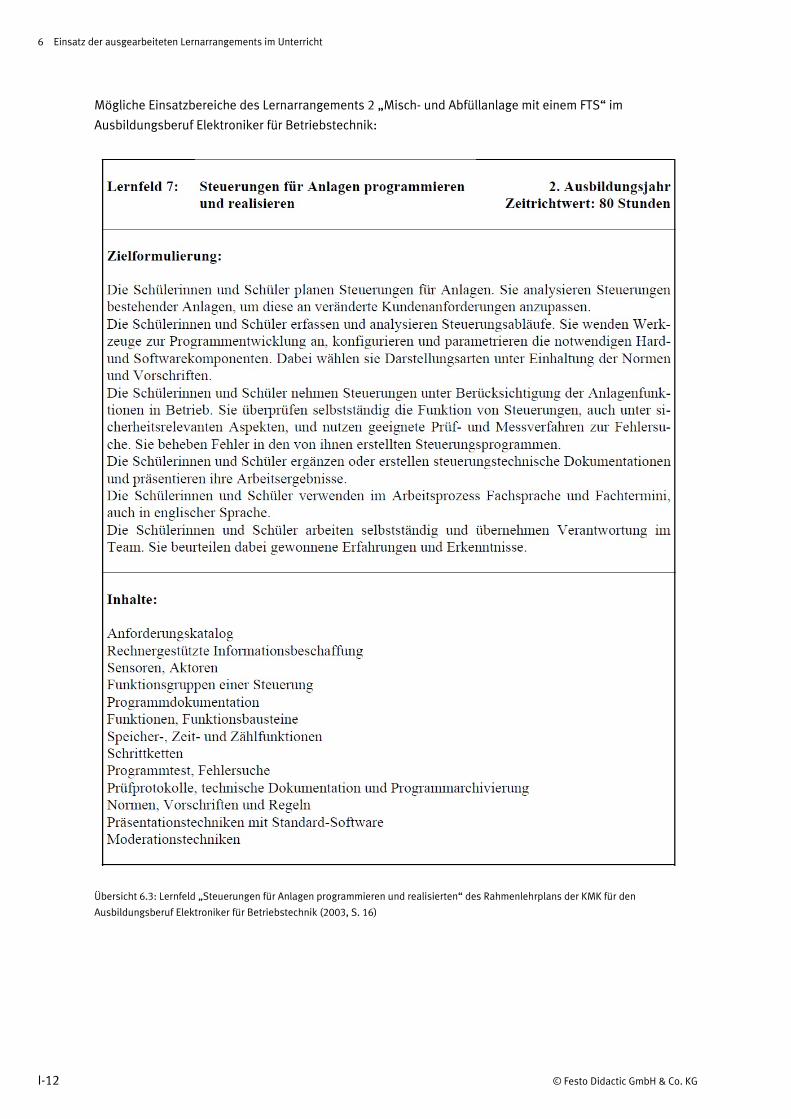
6 Einsatz der ausgearbeiteten Lernarrangements im Unterricht
I-12 © Festo Didactic GmbH & Co. KG
Mögliche Einsatzbereiche des Lernarrangements 2 „Misch- und Abfüllanlage mit einem FTS“ im
Ausbildungsberuf Elektroniker für Betriebstechnik:
Übersicht 6.3: Lernfeld „Steuerungen für Anlagen programmieren und realisierten“ des Rahmenlehrplans der KMK für den
Ausbildungsberuf Elektroniker für Betriebstechnik (2003, S. 16)

6 Einsatz der ausgearbeiteten Lernarrangements im Unterricht
© Festo Didactic GmbH & Co. KG I-13
Übersicht 6.4: Lernfeld „Antriebssysteme auswählen und integrieren“ des Rahmenlehrplans der KMK für den Ausbildungsberuf
Elektroniker für Betriebstechnik 2003, S. 17)

6 Einsatz der ausgearbeiteten Lernarrangements im Unterricht
I-14 © Festo Didactic GmbH & Co. KG
Mögliche Einsatzbereiche des Lernarrangements 2 „Misch- und Abfüllanlage mit einem FTS“ im
Ausbildungsberuf Elektroniker für Automatisierungstechnik:
Übersicht 6.5: Lernfeld „Steuerungen für Anlagen programmieren und realisieren“ des Rahmenlehrplans der KMK für den
Ausbildungsberuf Elektroniker für Automatisierungstechnik 2003, S. 15)

6 Einsatz der ausgearbeiteten Lernarrangements im Unterricht
© Festo Didactic GmbH & Co. KG I-15
6.2 Organisation des Unterrichts
Die am Lehrstuhl für Pädagogik an der Technischen Universität München entwickelten Lernsituationen
wurden im Unterricht der Staatlichen Berufsschule Pfaffenhofen an der Ilm im Bereich Elektrotechnik
erprobt. Die Entwicklungs- und Erprobungszeit erstreckte sich über zwei Schuljahre. Dabei erfolgte der
Einsatz sowohl im regulären Unterricht als auch in zusätzlich angebotenen Wahlfächern in verschiedenen
Ausbildungsberufen.
Die nachfolgend vorgestellten Lernarrangements eignen sich für einen Großteil der Ziele und Inhalte der
herangezogenen Lernfelder (siehe Übersichten 6.1 – 6.5), die je nach Ausbildungsberufen eine
unterschiedliche Unterrichtszeit erfordern. Für Lernarrangement 1 ist dabei je nach Intensität der
Bearbeitung und Leistungsfähigkeit der Lernenden ein Zeitumfang von ca. 40 bis 70 Unterrichtsstunden
denkbar. Für Lernarrangement 2 sind dies 30 bis 50 Unterrichtsstunden. Dies sind Erfahrungswerte für die
komplette Bearbeitung der Lernarrangements. Jederzeit ist die individuelle Erweiterung oder Verkürzung
beider Lernarrangements aufgrund von organisatorischen Vorgaben oder pädagogisch-didaktischen
Überlegungen möglich bzw. erforderlich.
Erfahrungen zeigen, dass eine Gruppengröße von zwei Lernenden besonders lernförderlich für die
Lernarbeit mit Robotino® ist. Stehen für die ganze Klasse nicht genügend Roboter zu Verfügung, so sollten
zumindest ausreichend PC-Systeme vorhanden sein. Maximal drei Lernende sollten als Gruppe die
Programmieraufgaben an einem PC bearbeiten können. Zum Test der erstellten Programme mit der
Hardware Robotino® können sich notfalls mehrere Lerngruppen einen Roboter teilen. Sie müssen sich dann
untereinander abstimmen, was zu zeitlichen Verzögerungen führen kann.
Soll mit dem PC eine direkte Verbindung zu Robotino® hergestellt werden, muss sich der WLAN Server von
Robotino® im AP (Access Point) Modus befinden. Diese Betriebsart bietet sich für den Einsatz in
Klassenzimmern ohne Netzwerkstruktur an, da keine Netzwerkverkabelung und IP-Adressierung notwendig
ist. Sind jedoch mehr als vier Robotino® im Einsatz, so kann es im WLAN Netzwerk zu Kollisionen kommen.
Hier empfiehlt sich der Betrieb im Client Modus. Dabei können beliebig viele Robotino® im lokalen Netzwerk
der Schule angeschlossen werden. In diesem Fall wird ein externer WLAN-Accesspoint benötigt und jeder
Roboter benötigt eine eigene IP-Adresse, die über die Folientastatur am Robotino® eingegeben werden
muss.
Bei der Verwendung eines externen Accesspoints sollte der Datenverkehr verschlüsselt (WEP, WAP…)
erfolgen, um einen Angriff auf das lokale Netzwerk zu verhindern.

6 Einsatz der ausgearbeiteten Lernarrangements im Unterricht
I-16 © Festo Didactic GmbH & Co. KG
6.3 Erprobung der Lernarrangements an der Berufsschule Pfaffenhofen
Der staatlichen Berufsschule Pfaffenhofen a. d. Ilm stehen fünf Robotino® für die Verwendung im Unterricht
zu Verfügung. Im regulären Unterricht wurde das Lernsystem hauptsächlich in geteilten Klassen eingesetzt,
so dass maximal drei Schüler an einem Roboter arbeiten können.
Im Wahlfach (max. zehn Schüler) arbeiteten je zwei Auszubildende (Partnerarbeit) an einem System. Da an
der Berufsschule Pfaffenhofen für den Unterricht 15 Laptops zur Verfügung stehen, konnte bei
Programmieraufgaben jeder Lernende sein eigenes Programm am Computer entwickeln. Lediglich für das
Testen des Programms und die Montage zusätzlicher Hardware mussten sich mehrere Schüler ein
Lernsystem teilen.
Die Gruppeneinteilung erfolgte im dargestellten Unterricht auf freiwilliger Basis, was sich positiv auf das
Lern- und Arbeitsklima auswirkte. Durch die freiwillige Gruppenbildung ergaben sich vorwiegend
leistungshomogene Gruppen.
Durch eine zeitweise anwesende zweite Lehrkraft im Unterricht ließ sich die Lernarbeit der Lernenden mit
dem Lernsystem intensiver unterstützen.
Der nachfolgende dargestellte Unterrichtsablauf zu den Lernarrangements ist exemplarisch zu sehen.
Aufgezeigt ist eine Möglichkeit der Umsetzung, wie sie an einem Berufsschulstandort mit seinen
spezifischen Rahmenbedingungen erfolgte. Es obliegt jeder Lehrkraft, Inhalte und Ablauf der
Lernarrangements entsprechend ihren didaktischen Vorstellungen sowie der schulspezifischen
Rahmenbedingungen anzupassen.
6.3.1 Einführung in die Thematik der mobilen Robotik
Um die Gegenwarts- und Zukunftsbedeutung mobiler Robotik zu verdeutlichen, erfolgt die Einführung in die
Thematik mit den Schülern in einem Unterrichtsgespräch über aktuelle Einsatzgebiete mobiler Systeme.
Sehr schnell erkennen die Lernenden, dass der Einsatz von mobilen Robotern als Transportsysteme bereits
in großen Bereichen der Industrie Einzug gefunden hat und in Zukunft immer mehr an Bedeutung
insbesondere bei tagtäglichen Aufgaben gewinnen wird.

6 Einsatz der ausgearbeiteten Lernarrangements im Unterricht
© Festo Didactic GmbH & Co. KG I-17
Der erste Kontakt der Lernenden mit Robotino® erfolgt über einen spielerischen Zugang zum Lernsystem.
Diesbezügliche Möglichkeiten sind in einer früheren Handreichung zum Lernsystem bereits ausführlich
dargestellt (siehe „Handreichung: Automatisierungstechnik innovativ und lernfeldorientiert unterrichten“)
Dazu müssen die Lernenden einen Parcours auf einer vorgegebenen Route mit dem Roboter durchfahren
(Übersicht 6.6). Wie bei vielen Computerspielen erfolgt das Ansteuern des Systems mit einem Joystick.
Übersicht 6.6: Parcour für eine Slalomfahrt mit Robotino®
Über diesen spielerischen Zugang erfahren die Lernenden auf motivierende und gleichzeitig
herausfordernde Art erste technische Details über das gesamte Robotersystem und seinen Antrieb.

6 Einsatz der ausgearbeiteten Lernarrangements im Unterricht
I-18 © Festo Didactic GmbH & Co. KG
6.3.2 Einsatz des Lernarrangements 1 im Unterricht
In „Lernarrangement 1“ soll Robotino® Werkstücke transportieren. Die innerhalb dieses Lernarrangements
dargestellten Lernsituationen lassen sich zwar auch einzeln und unabhängig voneinander bearbeiten. Bei
der Bearbeitung des gesamten Lernarrangements empfiehlt sich jedoch, die Abfolge der einzelnen
Lernsituationen beizubehalten.
In dem Lernarrangement „Robotino® in der Kundenpräsentation“ lernen die Schüler das System genauer
kennen. Hierfür müssen sie das Robotino®-Handbuch lesen und mit Hilfe von Fach- und Tabellenbuch die
Betriebsmittelkennzeichnungen einzelner Komponenten ausfindig machen. Anhand einer
Kundenpräsentation stellen die Lernenden den Roboter anderen Schülern vor und beantworten Fragen zum
System. Eine Vertiefung des Themas „Kundenpräsentation“ erfolgt fächerübergreifend im
Deutschunterricht.
Bei der Inbetriebnahme von Robotino® lernen die Schüler das EVA-Prinzip sowie den Unterschied zwischen
einer Steuerung und einer Regelung kennen. Die Themengebiete erschließen sich die Auszubildenden mit
Hilfe des Robotino®-Handbuchs sowie des Fach- und Tabellenbuchs. Ergänzend kommt dazu die
Lernsoftware „Steuern und Regeln“ und „LOGO! Training“ von Festo-Didactic zum Einsatz.
Im nächsten Lernschritt soll Robotino® um ein Diagnosesystem zu seinem Betriebszustand erweitert
werden. Die Lernenden können dabei drei unterschiedliche Varianten (siehe Übersichten 6.7 – 6.9) je nach
Ausstattung der Schule und vorhandener Lernzeit realisieren. Bevor dieses aufgebaut, angeschlossen und
programmiert werden kann, müssen die Schüler Planungen für die Erweiterungsschaltung durchführen.
Hierbei lernen sie unterschiedliche Schaltplanarten und Betriebsmittel kennen und erstellen eine Werkzeug-
und Materialliste. Je nach Ausstattung der Schule und verfügbarer Lernzeit erstellen die Schüler ihre
Erweiterungsplatine selbst oder greifen auf eine fertige Platine zurück.

6 Einsatz der ausgearbeiteten Lernarrangements im Unterricht
© Festo Didactic GmbH & Co. KG I-19
Übersicht 6.7
Übersicht 6.8 Übersicht 6.9
Verschiedene Diagnosesysteme für Robotino®
Bei der Programmierung des Startchecks für das Diagnosesystem lernen die Schüler die Grundlagen der
Digitaltechnik (UND, ODER, NICHT, RS-FF) kennen. Sie zeichnen zuerst die Normsymbole und erstellen
Wertetabellen und Zeitablaufdiagramme. Auch hier eignet sich zur Vertiefung die Lernsoftware „Elektronik
2“ der Firma Festo-Didactic.
Nach einer kurzen Einführung durch die Lehrkraft in die Bedienung der Robotino®-View Software erfolgt die
Programmierung des Startchecks durch die Schüler. Die Ergebnissicherung erfolgt durch Speichern und
Ausdrucken des Programms. Steht den Schülern kein Drucker zur Verfügung, sollten die Lösungsunterlagen
auf jeden Fall in einer anderen geeigneten Weise schriftlich dokumentiert werden.
6 Einsatz der ausgearbeiteten Lernarrangements im Unterricht
I-20 © Festo Didactic GmbH & Co. KG
Mit Hilfe der Erkenntnisse aus den vorherigen Lernsituationen soll nun der Werkstücktransport mit
Robotino® realisiert werden. Hierfür programmieren die Schüler den Antrieb für unterschiedliche
Fahrtrichtungen. Sie lernen verschiedene Sensoren kennen, mit deren Hilfe sich der Roboter orientieren und
sich vor ungewollten Kollisionen schützen kann. Daraufhin machen sich die Lernenden mit dem
Greifersystem vertraut. Bevor die jeweiligen Sensoren und der Greifer montiert und anschließend
programmiert werden, erfolgt eine Arbeitsplanung mit Hilfe von Material- und Werkzeuglisten sowie
Schaltplänen.
Übersicht 6.10 Schüler montieren einen Greifer am Lernsystem Robotino®
6.3.3 Einsatz des Lernarrangements 2 im Unterricht
Im „Lernarrangement 2“ wird eine Misch- und Abfüllanlage modernisiert. Dazu soll eine bereits vorhandene
verbindungsprogrammierte Steuerung (VPS) so modifiziert werden, dass die Steuerung der Mischanlage
durch eine speicherprogrammierbare Steuerung (SPS) erfolgt. Die An- und Ablieferung der Getränkepaletten
wird mit einem fahrerlosen Transportsystem (Robotino®) realisiert. Anhand der dargestellten Lernsituation
lernt der Schüler Grundlagen der speicherprogrammierbaren Steuerung (SPS) kennen, programmiert den
mobilen Roboter und vernetzt beide Systeme zu einem komplexen automatisierten Gesamtsystem.

6 Einsatz der ausgearbeiteten Lernarrangements im Unterricht
© Festo Didactic GmbH & Co. KG I-21
Übersicht 6.11 Einbindung von Robotino® in ein komplexes automatisiertes Gesamtsystem
In der ersten Aufgabe sollen die Auszubildenden eine vorhandene verbindungsprogrammierte Steuerung
(VPS) durch eine speicherprogrammierte Steuerung (SPS) ersetzen. Dabei knüpfen Sie an vorhandenem
Wissen (Schütztechnik, Grundlagen der Digitaltechnik) aus dem ersten Lehrjahr an. Sie wandeln eine VPS in
ein SPS-Programm um und lernen unterschiedliche Programmiersprachen einer SPS kennen.
Bei der Einführung in die SPS-Technik kann zum Teil auf bereits vorhandenes Unterrichtsmaterial aus dem
früheren Automatisierungstechnikunterricht zurückgegriffen werden. Unterstützend kommen SPS-
Unterlagen von Siemens und Festo-Didactic (Speicherprogrammierbare Steuerungen, Grundstufe;
Arbeitsbuch) zum Einsatz.

6 Einsatz der ausgearbeiteten Lernarrangements im Unterricht
I-22 © Festo Didactic GmbH & Co. KG
Als nächster Schritt erfolgt die Kommunikation von Robotino® mit der SPS. Dazu sollen die Schüler eine
Spannungsüberwachung in Robotino® View programmieren. Wird ein Spannungswert der Robotino®-Akkus
unterschritten, so soll an der SPS eine Warnleuchte darüber informieren.
Nötig dazu ist ein EasyPort, das mit Hilfe eines SysLink Kabels und 4mm Laborstecker an die SPS
angeschlossen wird. Je nach Schulausstattung sind auch andere Anschlussarten möglich, wie z.B.
Schraubanschlüsse.
Übersicht 6.12 Übersicht 6.13
Mögliche Anschlussvarianten von Sensoren und dem EasyPort
Um die Kommunikation von einer SPS zu Robotino® aufzuzeigen, soll der Roboter bei betriebsbereiter
Anlage durch eine blinkende LED auf sich aufmerksam machen. Dabei wird die Blinkfrequenz durch die SPS
mittels des Taktmerkerbytes erzeugt und an den Roboter via OPC-Schnittstelle übertragen. Bevor die LED an
Robotino® angeschlossen wird, erfolgt eine Berechnung des Vorwiderstandes durch die Lernenden. Um den
Zeitaufwand beim Anschließen der LED gering zu halten, wird eine vorgefertigte Platine verwendet.
Übersicht 6.14 Für den Anschluss an Robotino® vorbereitete LEDs
6 Einsatz der ausgearbeiteten Lernarrangements im Unterricht
© Festo Didactic GmbH & Co. KG I-23
Auf Anforderung durch die SPS soll Robotino® aus dem Lager eine Palette zur Mischstation bringen. Dazu ist
der Roboter so zu programmieren, dass er mit Hilfe der induktiven und optischen Sensoren selbständig die
Palette aufnimmt und seinen Weg zur Mischstation findet. Neben der Programmierung der einzelnen
Unterprogramme schließen die Lernenden die Sensoren an der E/A-Schnittstelle von Robotino® elektrisch
an. In diesem Zusammenhang lässt sich der Themenbereich der Sensorik mit Hilfe von E-Learning-
Programmen (Sensorik 1 und 2) vertiefen.
Nach der Programmierung des fahrerlosen Transportsystems (FTS) erfolgt die Programmierung der SPS für
die Mischanlage (Übersicht 6.15). Die Auszubildenden erstellen einen Funktionsplan für die Befüllung des
Tanks und den Stern-Dreieck-Anlauf des Mischmotors. Dabei lernen die Schüler exemplarisch noch weitere
Anlaufverfahren von Motoren kennen und führen Motorberechnungen durch. Durch die Aufgabenstellung,
einen zeitgeführten Stern-Dreieck-Anlauf zu programmieren, lässt sich der Themenkomplex der
Timerbausteine mit bearbeiten.
Übersicht 6.15 Ein Schüler programmiert den Stern-Dreieck-Anlauf für eine SPS
Die Darstellung der Mischanlage bietet sich für schwächere Gruppen mit Hilfe eines Modells an (siehe
Übersicht 6.16). In den leistungsstärkeren Gruppen können die Lernenden die Stern-Dreieck-Schaltung
inklusive Schütze und Motor selbst aufbauen. Ist genügend Zeit vorhanden, empfiehlt es sich im Sinne eines
ganzheitlichen Unterrichts, die Schaltung real aufzubauen (siehe Übersicht 6.17).

6 Einsatz der ausgearbeiteten Lernarrangements im Unterricht
I-24 © Festo Didactic GmbH & Co. KG
Übersicht 6.16 Modell der Mischanlage
Übersicht 6.17 Schüler bauen die Stern-Dreieck-Schaltung auf und verkabeln diese mit der SPS

6 Einsatz der ausgearbeiteten Lernarrangements im Unterricht
© Festo Didactic GmbH & Co. KG I-25
Nach dem Mischvorgang holt das FTS die Palette ab und bringt sie in das entsprechende Lager. Hierzu sollen
die Lernenden mit Hilfe der Robotino®-Kamera eine Farberkennung programmieren.
Für schnelle und leistungsstarke Schüler kann hier eine Differenzierung stattfinden. Zur Vertiefung der
Themen Farberkennung und Bildbearbeitung bieten sich die Projekte 10 und 11 im Arbeitsbuch an.
Hat der Roboter die Palette im Lager abgeliefert, nimmt er eine Parkposition ein. Dazu sollen die Schüler in
Robotino® View eine Regelung entwerfen, so dass Robotino® einen fest definierten Abstand zur Umrandung
einhält. Zur Vertiefung der Regelungstechnik eignet sich das E-Learning-Programm „Steuern und Regeln“.
Die dargestellten Lernarrangements lassen sich um zahlreiche Themenkomplexe erweitern. So kann z.B.
eine Temperaturregelung für den Mischbehälter mittels eines 2-Punkt-Reglers erfolgen. Oder die
Orientierung von Robotino® erfolgt mit Hilfe von Odometrie und eines Gyroskop-Sensors. Weiter ist eine
Analogwertverarbeitung in Verbindung mit einer Füllstandsmessung (z.B. Mittels kapazitiver Sensoren)
denkbar. Somit lassen sich durch Erweiterungen der Lernarrangements nahezu alle Themenbereiche der
Automatisierungstechnik abdecken. Dem Ideenreichtum der Lehrkraft sind hierbei keine Grenzen gesetzt.

I-26 © Festo Didactic GmbH & Co. KG
7 Das Lernpotenzial von Robotino® für eine moderne berufliche Bildung
7.1 Zielvorstellungen einer modernen beruflichen Bildung
Die Neuordnung der Metall- und Elektroberufe ab 1987 war die erste große strukturelle Reaktion auf
massive Veränderungen in Technik und Wirtschaft. Die zweite folgte mit der Einführung lernfeldorientierter
Rahmenlehrpläne durch die Kultusministerkonferenz der Länder (KMK) im Jahr 1996. Beide Maßnahmen
zielen auf eine umfassende berufliche Handlungskompetenz, die sich in der Fähigkeit zum selbstständigen
Planen, Durchführen und Kontrollieren von Arbeitstätigkeiten zeigt. Damit hat sich ein Wandel von der
stärker betonten Wissensorientierung in den früheren curricularen Lehrplänen hin zur
Kompetenzorientierung des Unterrichts vollzogen. Für die Unterrichtsgestaltung wird neben den fachlichen
Inhalten die Vermittlung von Schlüsselqualifikationen immer wichtiger. Dies erfordert eine
Unterrichtskonzeption, die handlungsorientiert ausgerichtet ist, vielfältige Möglichkeiten für
selbstgesteuertes Lernen bietet und ein konstruktivistisches Lernen ermöglicht.
Für berufliche Schulen zeigen sich aktuell Entwicklungstendenzen wie z.B. die Profilbildung einer Schule als
Kompetenzzentrum, Schulautonomie, Qualitätsentwicklung und Evaluation, Lernortkooperation,
Teamentwicklung oder die Umsetzung von lernfeldorientierten Lehrplänen. Der eigenständige Lernort
Berufsschule gewinnt durch fachliche Spezialisierungen und besondere Schwerpunktsetzungen für
bestimmte Ausbildungsberufe oder Ausbildungsinhalte an Qualität. Für den Bereich der
Automatisierungstechnik nehmen die technischen Anforderungen aufgrund des hohen
Innovationspotenzials des für Deutschland wichtigen Wirtschaftssektors weiter zu. Den inhaltlichen sowie
didaktischen Anforderungen kann die berufliche Bildung in den Berufsfeldern Elektrotechnik und
Metalltechnik am ehesten entsprechen, wenn berufliche Schulen mit ihren Bildungsexperten über technisch-
medial hervorragend ausgestattete Lernumgebungen verfügen. Dann ist eine konstruktivistische
Unterrichtsgestaltung möglich, die in berufsrelevanten, handlungssystematisch ausgerichteten
Lernsituationen theoretisches Wissen entlang beruflicher Handlungsbezüge entwickelt.
7.2 Das Lernsystem Robotino® als Bestandteil einer modernen beruflichen Bildung
Mit der breiten Einführung von Lernfeldern in den Rahmenlehrplänen der KMK ab ca. 2000 sind für die
Lehrkräfte an Berufsschulen zusätzliche curriculare Aufgaben zur konkreten Realisierung der sehr offenen
Vorgaben für fachliche und überfachliche Bildungsziele des Unterrichts entstanden. Das Lernsystem
Robotino® einschließlich der didaktisch ausgearbeiteten Vorschläge für den unmittelbaren
Unterrichtseinsatz erleichtert erheblich die curriculare Arbeit und die Arbeit der Lehrkraft im Unterricht bei
der Umsetzung vieler Lehrplaninhalte zur Automatisierungstechnik. Für mehrstündige Lernsituationen, in
denen Schüler weitgehend selbstgesteuert lernen und arbeiten können, liegen damit ausgearbeitete
Vorschläge für geeignete berufstypische Lernsituationen zur Automatisierungstechnik vor, die hinreichend
komplex, weitgehend authentisch und in vollständigen Lernhandlungen bearbeitbar sind. Dies ist für die
Berufsfelder Elektrotechnik und Metalltechnik hoch relevant.

7 Das Lernpotenzial von Robotino® für eine moderne berufliche Bildung
© Festo Didactic GmbH & Co. KG I-27
Eine wichtige Einflussgröße für komplexe und realitätsnahe berufliche Lernsituationen in einem
handlungsorientierten Unterricht sind infrastrukturelle Rahmenbedingungen. In der Regel ist dafür ein
integrierter Fachunterrichtsraum erforderlich. Das Lernsystem Robotino® kann vorhandene
Fachunterrichtsräume in ihrer technischen Ausstattung erheblich erweitern und durch den technischen
Aufbau des Systems zu einer qualitativ sehr hochwertigen Ausstattung beitragen. Robotino® ist dabei
kompatibel zu bestehenden automatisierungstechnischen Anlagen wie einer speicherprogrammierbaren
Steuerung oder anderen, typischen automatisierungstechnischen Komponenten. Eine besondere Stärke von
Robotino® ist aber, dass dieses komplexe technische System auch außerhalb der Umgebung eines
integrierten Fachunterrichtsraumes in jedem Klassenzimmer autonom eingesetzt werden kann. Lediglich ein
PC ist für die Ansteuerung erforderlich. Auch außerhalb der aufwändig gestalteten Lernumgebung eines
Spezialraumes sind komplexe berufsrelevante Handlungen an nahezu jedem Lernort begleitend zu
theoretischen Lerninhalten auf sehr hohem Niveau realisierbar.
Die sehr vielfältigen und ebenso anspruchsvollen Anforderungen an die Lehrkräfte bei der Gestaltung von
handlungsorientierten Lehr-Lern-Prozessen erfordern eine hohe fachliche Sicherheit ebenso wie
umfassende methodisch-didaktische Fähigkeiten. Die erforderliche Einarbeitung in das Lernsystem
Robotino®, die Planung und Entwicklung von Lernarrangements einschließlich dem Erstellen von
erforderlichen Unterrichtsmaterialien bedingt einen hohen Zeitaufwand. Hierbei erschließt das Robotino®
Arbeitsbuch einer Lehrkraft das für ihren Unterricht mit dem Lernsystem erforderliche Fachwissen anhand
von elf unterschiedlichen Projekten leicht im Selbststudium und ermöglicht schnell einen technisch
vertrauten Umgang mit dem Lernsystem. Die existierenden Handreichungen liefern Anregungen für die
didaktische Einbindung von Robotino® in einem konstruktivistischen Unterricht. Sie erleichtern die
Integration dieses Systems in den eigenen, bestehenden Unterricht erheblich und bieten vielfältige
Anregungen für die schulspezifische Entwicklung neuer Lernarrangements.
Die dargestellten Lernarrangements mit den einzelnen, auch modular einsetzbaren Lernsituationen betonen
den Prozesscharakter konstruktivistischen Lernens. In einem Unterricht mit Robotino® lassen sich
Lernaktivitäten stark auf Seiten der Lernenden verlagern. Die Lehrkraft unterstützt, berät und regt diese
Lernaktivitäten an. Lernende können sich aktiv und selbstgesteuert während des gesamten Unterrichts mit
automatisierungstechnischen Lerngegenständen beschäftigen, die eine hohe gegenwärtige als auch
zukünftige berufliche Relevanz für sie haben. Dies begünstigt ihre Motivation und ihr Interesse, das sich
stabilisieren und weiterentwickeln kann.
Konstruktivistisches Lernen erfordert, den bestehenden Erfahrungs- und Wissenshintergrund der Lernenden
zu berücksichtigen und darauf bezogene Interpretationen stattfinden zu lassen. Robotino® bietet eine sehr
weite inhaltliche Palette an Anknüpfungspunkten, die von einfachen elektrotechnischen Grundlagen bis zu
äußerst komplexen und herausfordernden automatisierungstechnischen Fragestellungen reichen. Diese
individuell anpassbaren Inhaltsbereiche und Schwierigkeitsgrade ermöglichen eine hochgradige
Differenzierung des Unterrichts.

7 Das Lernpotenzial von Robotino® für eine moderne berufliche Bildung
I-28 © Festo Didactic GmbH & Co. KG
In den handlungsorientiert ausgelegten Lernsituationen geht die Verantwortung für das Lernen zu großen
Teilen auf die Lernenden über. Folglich fungiert die Lehrkraft nicht vorwiegend als Wissensvermittler,
sondern vielmehr als Berater und Unterstützer im Lernprozess. Bei Fragen der Schüler leitet sie zur
selbstständigen Problemlösung an und unterstützt Lernende, eigene Lösungskonzepte entwickeln zu
können. Für die in den Lernsituationen dargestellten Programmieraufgaben existiert nicht nur eine richtige
Musterlösung, sondern eine Vielzahl von fachlich akzeptablen Lösungsvarianten.
Ein wichtiges didaktisches Konzept in einem solchen Unterricht sind Fachgespräche, die in einem Unterricht,
in denen Lernende über weite Strecken die Rolle aktiv Handelnder übernehmen, eine besondere Bedeutung
haben. In Fachgesprächen kann sich eine Lehrkraft im inhaltlichen Dialog mit den Lernenden sowohl auf den
Lerngegenstand als auch auf den Lernprozess beziehen und kommunikative Hilfestellungen anbieten.
Neben den Fachgesprächssituationen in Kleingruppen erfordert ein solcher Unterricht aber auch die
instruktionale Unterstützung in Plenumsphasen, um ineffektivem Lernen und der Überforderung einzelner
Lernender entgegenzuwirken.
Robotino® bildet für die Automatisierungstechnik einen Gegenstandsbereich ab, der ganzheitlich und
berufsnah ist. Die im Unterricht zu bearbeitenden Problemstellungen sind wenig vorstrukturiert und nicht
reduktionistisch vereinfacht. Auftretende Fehler oder ein Optimierungsbedarf bei Steuerungslösungen
bieten ein weiteres Lernpotenzial. Dazu erfolgende Fachgespräche ermöglichen das Besprechen und
Korrigieren von Schülerlösungen und können verständnisfördernd wirken. Für Lehrkräfte zieht diese Form
der Unterstützung Lernender bei individualisierten Lernprozessen eine erhebliche Veränderung ihrer Rolle
gegenüber traditionellen Unterrichtsformen nach sich. Neben veränderten pädagogischen Anforderungen
stellen sich auch in fachlicher Hinsicht meist sehr hohe Anforderungen an sie. Robotino® hilft diese
einzulösen.
7.3 Fazit
Für die Entwicklung beruflicher Handlungskompetenz in der Automatisierungstechnik bietet das Lernsystem
Robotino® ein äußerst vielfältiges inhaltliches Potenzial auf dem aktuellen Stand der Technik. Zudem lassen
sich neben umfangreichen fachlichen Inhalten bei einer entsprechenden didaktischen Konzeption des
Unterrichts Schlüsselqualifikationen in selbstgesteuerten Lernumgebungen vermitteln. Robotino® eignet
sich für eine Vielzahl von Lernzielen und Inhalten aus den lernfeldorientierten Lehrplänen für die
Berufsschule. Darüber hinaus eröffnet das Lernsystem auch für weiterführende berufliche
Bildungseinrichtungen vielfältige inhaltliche und methodische Lernzugänge zur Automatisierungstechnik.

© Festo Didactic GmbH & Co. KG I-29
8 Zusammenfassung
In der Automatisierungstechnik nehmen die technischen Anforderungen für Facharbeiter aufgrund des
hohen Innovationspotenzials in diesem für Deutschland wichtigen Wirtschaftssektor stetig zu. Inhaltliche
sowie didaktische Anforderungen automatisierungstechnischer Lerninhalte erfordern einen
handlungsorientierten Unterricht, der ein konstruktivistisches Lernen anhand von berufstypischen
Aufgabenstellungen ermöglicht. Dies begünstigt eine technisch-medial geeignet ausgestattete
Lernumgebung, mit darauf abgestimmten, ganzheitlichen Vermittlungskonzepten. Robotino® löst dies ein.
Das Lernsystem Robotino® liefert zusammen mit den hier dargestellten und erprobten Unterrichtsvorhaben
konkrete Umsetzungsbeispiele für den Unterricht in der Berufsschule. Die Lernarrangements und
Lernsituationen für Elektroniker zum Einsatz von Robotino® im Unterricht sind exemplarisch zu sehen. Sie
sind detailliert ausgearbeitet und lassen sich unmittelbar im Unterricht umsetzen. Sie sollen jedoch in erster
Linie Impulse und Anregungen zur Gestaltung von Lernsituationen mit dem Lernsystem geben und legen
eine schulspezifische Anpassung an individuelle Gegebenheiten vor Ort nahe. Hierzu zählen z.B.
vorhandene technische Ausstattung der Schule, personelle Voraussetzungen, Stundenplangestaltung etc.
Die hier dargestellten Lernarrangements basieren auf einem Lernsystem, das die Teilsysteme Robotino®,
speicherprogrammierbare Steuerung (SPS), Plattform sowie Unterlagen / Lernsoftware umfasst. Zu
Robotino® als Einheit von Festo Didactic gehören neben dem mobilen Roboter eine Programmiersoftware
und ein Arbeitsbuch. Die Lernarrangements sehen die Integration einer speicherprogrammierbaren
Steuerung (SPS) vor, die über die OPC-Schnittstelle an das Lernsystem Robotino® angebunden ist und den
Roboter in einem automatisierten Gesamtsystem integriert. Eine Plattform stellt ein Lagersystem dar, das
durch den mobilen Roboter be- und entladen wird. Es bietet flexible Erweiterungsmöglichkeiten für
komplexe Lernsituationen. Die ausgearbeiteten Lernarrangements liefern Unterlagen für den unmittelbaren
Unterrichtseinsatz. Sie greifen zwei konkrete betriebliche Beispiele auf und zeigen exemplarisch
Umsetzungsmöglichkeiten für den Einsatz des Roboters im Berufsschulunterricht. In Lernarrangement 1
erschließen sich die Lernenden das technische System Robotino® und setzen es zum Transport von
Werkstücken ein. Lerninhalte sind hierbei Grundlagen der Steuerungstechnik. In Lernarrangement 2
kommuniziert Robotino® mit einer SPS und wird somit zu einem intelligenten Sensor für die komplexe
Steuerung einer Farbmischanlage.
Das Lernsystem Robotino® einschließlich der didaktisch ausgearbeiteten Vorschläge für den unmittelbaren
Unterrichtseinsatz unterstützt die curriculare Arbeit und die Arbeit der Lehrkraft im Unterricht bei der
Umsetzung lernfeldorientierter Lehrpläne und darin enthaltener Inhalte zur Automatisierungstechnik. Für
mehrstündige Lernsituationen, in denen Schüler weitgehend selbstgesteuert lernen und arbeiten können,
liegen damit ausgearbeitete Vorschläge für geeignete berufstypische Lernsituationen vor, die hinreichend
komplex, weitgehend authentisch und in vollständigen Lernhandlungen bearbeitbar sind.

8 Zusammenfassung
I-30 © Festo Didactic GmbH & Co. KG
Eine große Stärke des Lernsystems Robotino® ist, dass dieses komplexe technische System in jedem
Klassenzimmer unabhängig von der technisch aufwändigen Ausstattung eines integrierten
Fachunterrichtsraumes für Automatisierungstechnik eingesetzt werden kann. Es kann zudem vorhandene
Fachunterrichtsräume in ihrer technischen Ausstattung erheblich erweitern und zu einer qualitativ sehr
hochwertigen Ausstattung beitragen.
Insgesamt bietet das Lernsystem Robotino® ein äußerst vielfältiges inhaltliches Potenzial auf dem aktuellen
Stand der Technik zur Entwicklung beruflicher Handlungskompetenz in der Automatisierungstechnik.
Robotino® legt mit seinem didaktischen Potenzial einen handlungsorientierten Unterricht nahe, in dem sich
über fachliche Inhalte hinaus Schlüsselqualifikationen in schülerzentrierten Lernumgebungen fördern
lassen.





























