


CSI7657-01Topics in Pattern Recognition:
Gesture Recognition and Robotics
Spring Semester, 2010

Teaching Staff
Lecturer
– Sung-Bae Cho (C515; 2123-2720; [email protected])
– Kyung-Joong Kim ( 3408-3838, [email protected])
TA
– Jun Ki Min ( 2123-4803; [email protected])
Web page: http://sclab.yonsei.ac.kr/Courses/10TPR
Hours : Tue 5, Thu 2, 3
Place : A646
Office Hours : Tue 9, 10
Course Goals
Study basics to recognize gestures with accelerometers
Understand interdisciplinary nature of robotics
Review state-of-the-art papers in those fields
Try to formulate and solve challenging problems

Gesture
http://image.asiatoday.co.kr

Gesture: Applications

Robot

Course Materials
Reading in Pattern Recognition
– Gesture Recognition
• Pattern Recognition
• Pattern Recognition Letters
• Pervasive and Mobile Computing
– Robotics
• Nature, Science, PNAS, Current Biology, PLOS Biology, Nature Physics
Evaluation Criteria
Evaluation Criteria
– Term Project (written report and an oral presentation) : 50%
– Written Exam : 30%
– Class Presentation : 20%
Term Project (Oral presentation is required) :
– Theoretical Issue (Analysis, Experiment, Simulation) : Originality
– Interesting Programming (Game, Demo, etc) : Performance
– Survey : Completeness
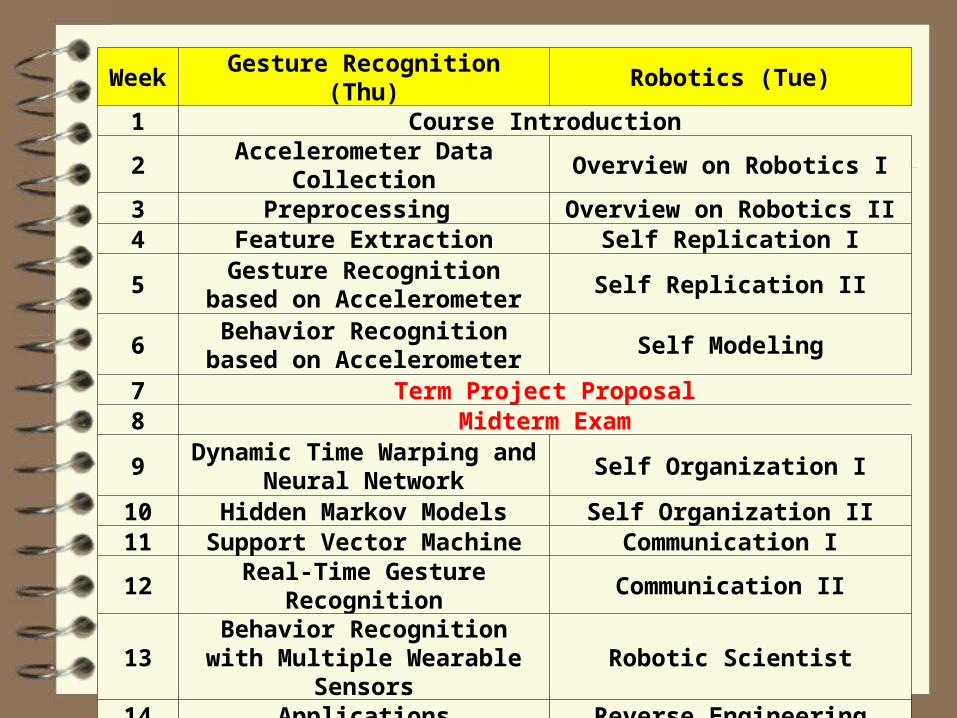
Week Gesture Recognition (Thu) Robotics (Tue)1 Course Introduction2 Accelerometer Data Collection Overview on Robotics I3 Preprocessing Overview on Robotics II4 Feature Extraction Self Replication I
5Gesture Recognition based on
AccelerometerSelf Replication II
6Behavior Recognition based on
AccelerometerSelf Modeling
7 Term Project Proposal8 Midterm Exam
9Dynamic Time Warping and
Neural NetworkSelf Organization I
10 Hidden Markov Models Self Organization II11 Support Vector Machine Communication I12 Real-Time Gesture Recognition Communication II
13Behavior Recognition with Multiple Wearable Sensors
Robotic Scientist
14 Applications Reverse Engineering15 Term Project Final Presentation16 Final Exam
Possible Project Lists
Gesture clustering, classification, understanding (high-level) Understanding sequential gestures Gesture-based interface for games, phone, and robot Mixed-initiative gesture recognition Augmented reality with gesture recognition
Evolving robot’s morphology, behavior, and controller Game playing with vision-based robots Automatic behavior transfer among different robots (ghost controller) Fault-tolerant robots Mining scientific data using Eureqa






























