1 - 2010-12-22
Actuator design component vs. system approach
Jens-Henrik Neuenkirchen

2 - 2010-12-22
Requirement from 13628-4 / 17D
7.10.2.2.2 General
The following requirements apply to the design of subsea valve actuators.
a) Design shall consider marine growth, fouling, corrosion, hydraulic operating fluid and, if exposed, the wellstream fluid.
b) Subsea actuator opening and closing force shall be sufficient to operate the subsea valve when the valve is at the most severe design operating conditions without exceeding 90 % of the hydraulic operating pressure as defined in 7.10.2.2.2 c). This requirement is intended to ensure that the actuator is adequately designed to operate with the hydraulic power source at FAT and SIT without the pressure (ambient external and hydraulic pressure head) associated with water depth.

3 - 2010-12-22
A Larger Piston diameter• Less Pressure (PL) for a given load• More Fluid Driving Pressure
Conflicting Claims
PLLoad
Claim A:
A Smaller Piston diameter• Reduced Flow Rate• Reduced Resistance to Flow• More Pressure to drive Load
Claim B:
PL Load

4 - 2010-12-22
The Challenge:
Conflicting Claims
PLLoad PL Load
Claim A: Claim B:
• Maybe none of them are true?
• Claims A and B cannot both be true

5 - 2010-12-22
The basic hydraulic production control system
PS P-SCM-inDCVLP
PL Fail safeactuator
FqHPU
UmbilicalSCM
Circuit Optimisation
Umbilical dp 10% Actuator dp 90%

6 - 2010-12-22
Circuit Optimisation
5,000 psi LP supply system
The Basis for Subsea Control SystemPressure OptimisationN = transmitted power
N (Ps- PL) * PL

7 - 2010-12-22
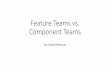
The basic hydraulic production control system
PS P-SCM-inDCVLP
PL Fail safeactuator
FqHPU
UmbilicalSCM
Circuit Optimisation
Umbilical dp 10%
Should be 50% to optimise umbilical system
Actuator dp 90%
Should be lower than 90% to optimise total system

8 - 2010-12-22
Presentation title
Presenters name
Presenters title
E-mail address, tel: +00 00 00 00
www.statoil.com
Thank you