


Cen
tre f
or
Auto
nom
ou
s S
yst
em
s
Petter Ögren CAS talk 1
A Control Lyapunov Function Approach to
Multi Agent Coordination
A Control Lyapunov Function Approach to
Multi Agent Coordination
P. Ögren, M. Egerstedt* and X. HuRoyal Institute of Technology (KTH), Stockholm
and Georgia Institute of Technology*
IEEE Transactions on Robotics and Automation, Oct 2002
Cen
tre f
or
Auto
nom
ou
s S
yst
em
s
Petter Ögren CAS talk 2
Multi Agent RoboticsMulti Agent Robotics
Motivation:
Flexibility
Robustness
Price
Efficiency
Feasibility
Applications:
Search and rescue missions
Spacecraft inferometry
Reconfigurable sensor array
Carry large/awkward objects
Formation flying
Cen
tre f
or
Auto
nom
ou
s S
yst
em
s
Petter Ögren CAS talk 3
Problem and Proposed Solution Problem and Proposed Solution
Problem: How to make set-point controlled robots moving along trajectories in a formation ”wait” for eachother?Idea: Combine Control Lyapunov Functions (CLF) with the Egerstedt&Hu virtual vehicle approach.Under assumptions this will result in:
Bounded formation error (waiting)Approx. of given formation velocity (if no waiting is nessesary).Finite completion time (no 1-waiting).
Cen
tre f
or
Auto
nom
ou
s S
yst
em
s
Petter Ögren CAS talk 4
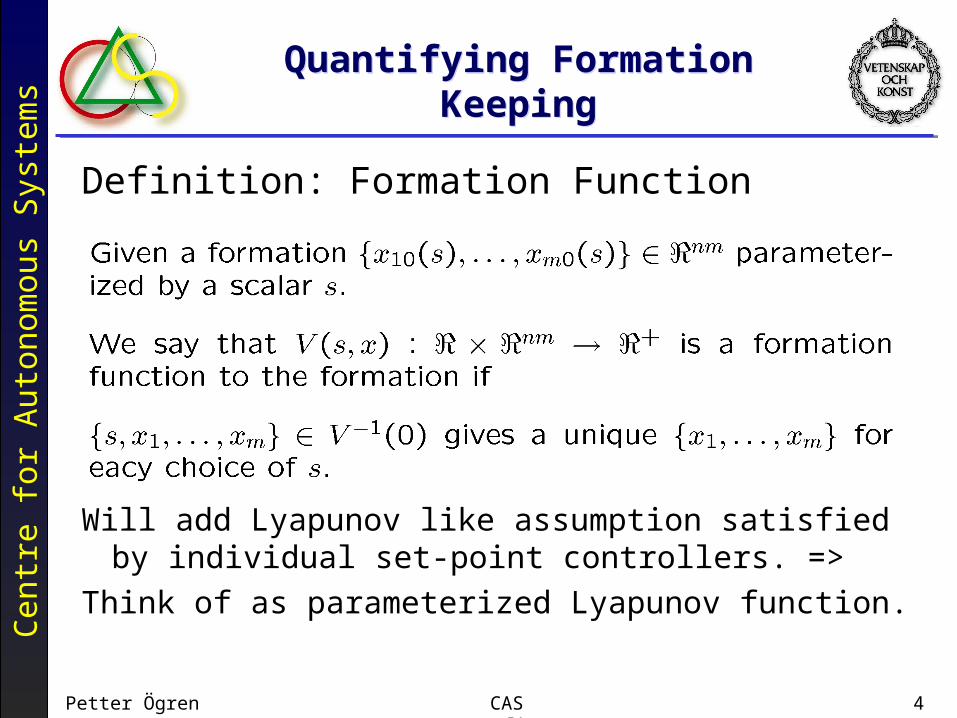
Quantifying Formation KeepingQuantifying Formation Keeping
Will add Lyapunov like assumption satisfied by individual set-point controllers. =>
Think of as parameterized Lyapunov function.
Definition: Formation Function
Cen
tre f
or
Auto
nom
ou
s S
yst
em
s
Petter Ögren CAS talk 5
Examples of Formation FunctionExamples of Formation Function
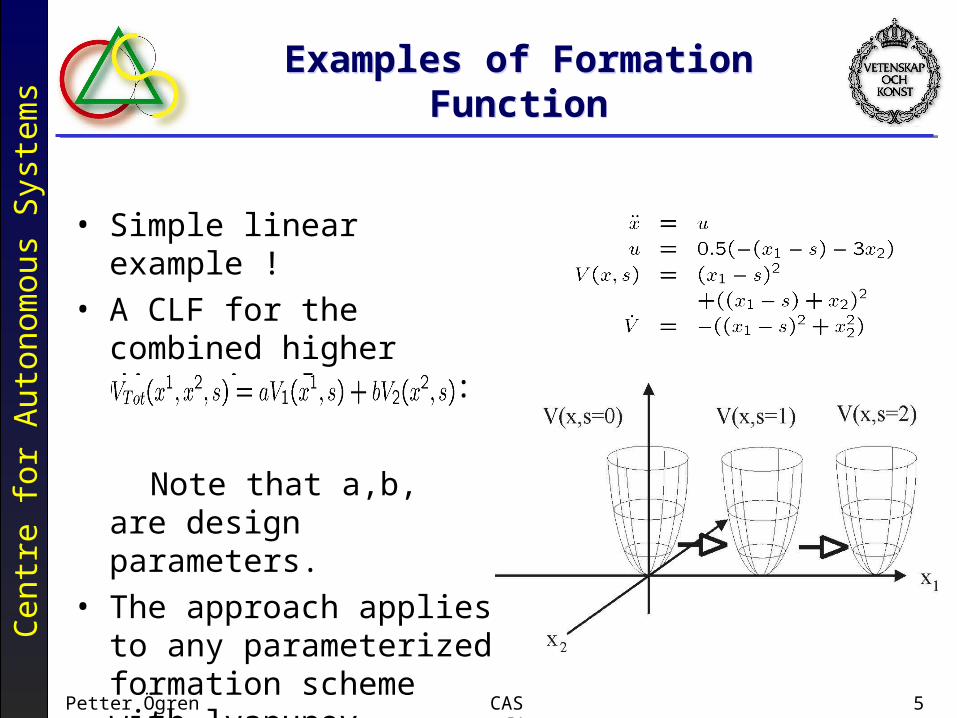
• Simple linear example !• A CLF for the combined
higher dimensional system:
Note that a,b, are design parameters.
• The approach applies to any parameterized formation scheme with lyapunov stability results.
Cen
tre f
or
Auto
nom
ou
s S
yst
em
s
Petter Ögren CAS talk 6
Main AssumptionMain Assumption
We can find a class K function such that the given set-point controllers satisfy:
This can be done when -dV/dt is lpd, V is lpd and decrescent. It allows us to prove:
Bounded V (error): V(x,s) < VU
Bounded completion time.
Keeping formation velocity v0, if V ¿ VU.
Cen
tre f
or
Auto
nom
ou
s S
yst
em
s
Petter Ögren CAS talk 7
Speed along trajectory: How Do We Update s?
Speed along trajectory: How Do We Update s?
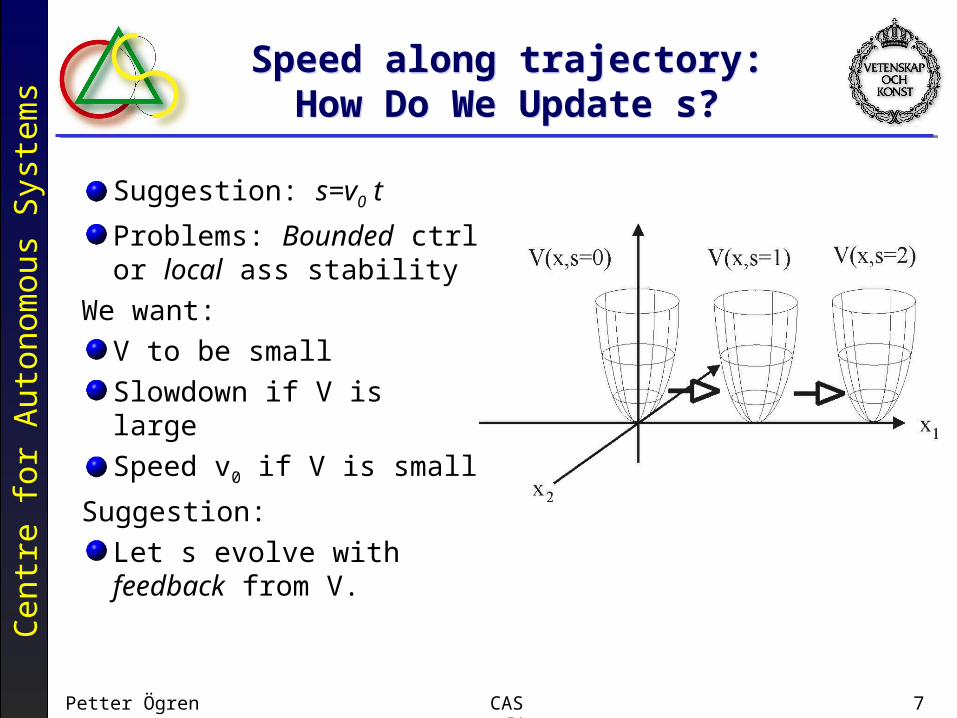
Suggestion: s=v0 t
Problems: Bounded ctrl or local ass stability
We want:
V to be small
Slowdown if V is large
Speed v0 if V is small
Suggestion:
Let s evolve with feedback from V.
Cen
tre f
or
Auto
nom
ou
s S
yst
em
s
Petter Ögren CAS talk 8
Evolution of sEvolution of s
Choosing to be:
We can prove:
Bounded V (error): V(x,s) < VU
Bounded completion time.
Keeping formation velocity v0, if V ¿ VU.
Cen
tre f
or
Auto
nom
ou
s S
yst
em
s
Petter Ögren CAS talk 9
Proof sketch: Formation error Proof sketch: Formation error
Cen
tre f
or
Auto
nom
ou
s S
yst
em
s
Petter Ögren CAS talk 10
Proof sketch: Finite Completion Time Proof sketch: Finite Completion Time
Find lower bound on ds/dt
Cen
tre f
or
Auto
nom
ou
s S
yst
em
s
Petter Ögren CAS talk 11
The Unicycle Model, Dynamic and Kinematic
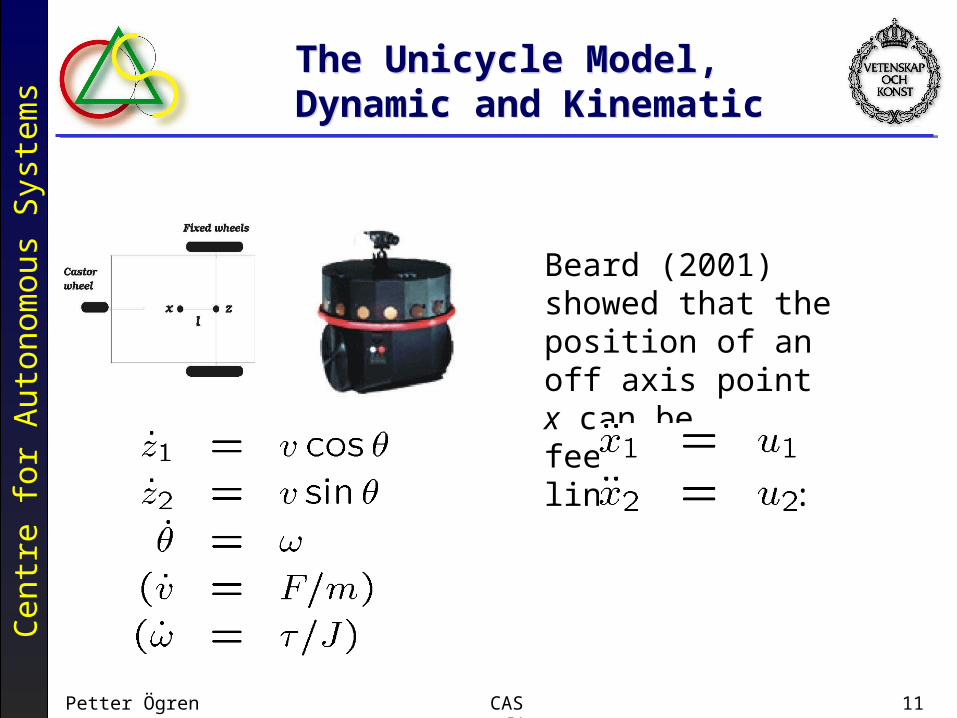
The Unicycle Model, Dynamic and Kinematic
Beard (2001) showed that the position of an off axis point x can be feedback linearized to:
Cen
tre f
or
Auto
nom
ou
s S
yst
em
s
Petter Ögren CAS talk 12
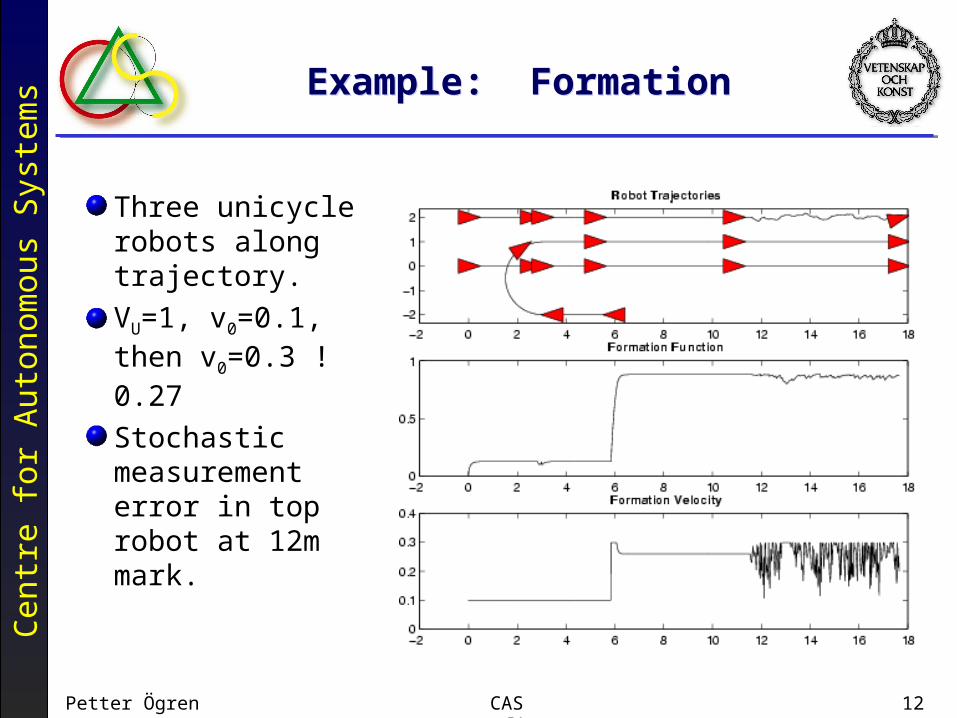
Example: FormationExample: Formation
Three unicycle robots along trajectory.
VU=1, v0=0.1, then v0=0.3 ! 0.27
Stochastic measurement error in top robot at 12m mark.
Cen
tre f
or
Auto
nom
ou
s S
yst
em
s
Petter Ögren CAS talk 13
Extending Work by Beard et. al. Extending Work by Beard et. al.
”Satisficing Control for Multi-Agent Formation Maneuvers”, in proc. CDC ’02
It is shown how to find an explicit parameterization of the stabilizing controllers that fulfills the assumption
These controllers are also inverse optimal and have robustness properties to input disturbances
Implementation
Cen
tre f
or
Auto
nom
ou
s S
yst
em
s
Petter Ögren CAS talk 14
What if dV/dt <= 0 ?What if dV/dt <= 0 ?
If we have semidefinite and stability by La Salle’s principle we choose as:
By a renewed La Salle argument we can still show: V<=VU , s! sf and x! xf.
But not: Completion time and v0.
Cen
tre f
or
Auto
nom
ou
s S
yst
em
s
Petter Ögren CAS talk 15
Formations with a Mission: Stable Coordination of Vehicle Group Maneuvers
Mathematical Theory of Networks and Systems (MTNS ‘02)
Visit: http://graham.princeton.edu/ for related information
Edward Fiorelli and Naomi Ehrich Leonard [email protected], [email protected]
Mechanical and Aerospace Engineering
Princeton University, USA
Optimization and Systems Theory
Royal Institute of Technology, Sweden
Petter [email protected]
Another extension:Another extension:
Cen
tre f
or
Auto
nom
ou
s S
yst
em
s
Petter Ögren CAS talk 16
•Configuration space of virtual body is for orientation, position and expansion factor:
• Because of artificial potentials, vehicles in formation will translate, rotate, expand and contract with virtual body.
• To ensure stability and convergence, prescribe virtual body dynamics so that its speed is driven by a formation error.
• Define direction of virtual body dynamics to satisfy mission.
• Partial decoupling: Formation guaranteed independent of mission.
• Prove convergence of gradient climbing.
Approach: Use artificial potentials and virtual body with dynamics.
Approach: Use artificial potentials and virtual body with dynamics.
Cen
tre f
or
Auto
nom
ou
s S
yst
em
s
Petter Ögren CAS talk 17
ConclusionsConclusions
Moving formations by using Control Lyapunov Functions.Theoretical Properties:
V <= VU, error
T < TU, time
v ¼ v0 velocity
Extension used for translation, rotation and expansion in gradient climbing mission
Cen
tre f
or
Auto
nom
ou
s S
yst
em
s
Petter Ögren CAS talk 18
Related PublicationsRelated Publications
A Convergent DWA approach to Obstacle Avoidance
Formally validatedMerge of previous methods using new mathematical framework
Obstacle Avoidance in FormationFormally validatedExtending concept of Configuration Space Obstacle to formation case, thus decoupling formation keeping from obstacle avoidance






























