Dynamics and Control ofQuadrotor UAV
Moncrief-O’Donnell Chair, UTA Research Institute (UTARI)The University of Texas at Arlington, USA
F.L. Lewis, NAI
Director, Key Laboratory of Autonomous Systems and Network Control, MoESouth China University of Technology, Guangzhou
Hai-Long Pei
and

Moncrief-O’Donnell Chair, UTA Research Institute (UTARI)The University of Texas at Arlington, USA
and
F.L. Lewis, NAI
Talk available online at http://www.UTA.edu/UTARI/acs
Dynamics and Control ofQuadrotor UAV
Qian Ren Consulting Professor, State Key Laboratory of SyntheticalAutomation for Process Industries
Northeastern University, Shenyang, China
Supported by :NSF AFOSR EuropeONR – Marc SteinbergUS TARDEC
Supported by :China NNSFChina Project 111


AR Drone Parrot
Crazyflie
3D Robotics Octocopter


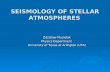
Position –navigational states
Angular position –attitudes
The Quadrotor States
Roll
Pitch
yaw
xyz
X
Body AxesVs. earth‐fixed axes

Control distribution from 4 actuator rotors to lift and torques
Lift
torques
u

Position –navigational states
Angular position –attitudes
The Quadrotor States
Roll
Pitch
yaw
xyz
X
Lift
torques
u
The Quadrotor Controls
6 states and 4 controls = under‐actuated system

xyz
Position states‐ navigation states Attitude states
Quadrotor equations of motion
Position subsystem
Angle subsystem

00 Fmg
sincos sincos cos
F u
Virtual control input for position subsystem
Position subsystem
Attitude subsystem
uxyz
torques
lift
attitudes
positionAttitudesubsystem Position
subsystem

00 Fmg
Backstepping Control Design
00 ( )d dF F Fmg
00 dm F Fmg
dF F F And force mismatch is
Where ideal virtual force input is dF

00 dm F Fmg
Backstepping Control Design
1. Pick desired virtual force to make position dynamics track desired positionsdF
2. Pick actual control – the torques ‐ to make force error go to zero F
d

Given find required attitude angles and liftdF
define
then
So that
Then compute
Note that is not involved here!
An Inverse Kinematics problam

Inputs are desired position and yaw (heading)
Backstepping Controller‐ 2 loops