Viscous bubbly flows simulation with an interface SPH model N. Grenier a,* , D. Le Touz´ e a , A. Colagrossi b,c , M. Antuono b , G.Colicchio b,c a LUNAM Universit´ e, ´ Ecole Centrale Nantes, LHEEA Lab. (UMR CNRS), Nantes, France b CNR-INSEAN, The Italian Ship Model Basin, Roma, Italy c Centre of Excellence for Ship and Ocean Structures, CeSOS/AMOS, NTNU, Trondheim, Norway Abstract The multi-fluid SPH formulation by Grenier et al. (2009) is extended to study practical problems where bubbly flows play an important role for production processes of the offshore industry. Since these flows are dominated by viscous and surface tension effects, the proposed formulation includes specific models of these physical effects and validations on specific benchmark test cases are carefully performed. The numerical outputs are validated against analytical and numerical reference solutions, and accuracy and convergence of the proposed numerical model are assessed. This model is then used to simulate viscous incompressible bubbly flows of increasing complexity. These flows include the evolution of isolated bubbles, the merging of two bubbles, and the separation process in a bubbly flow. In each case, results are compared to reference solutions and the influence of the Bond number on these interfacial flow evolutions is investigated in detail. Key words: SPH, multi-fluid, interfacial flows, non-diffusive interface, viscous bubbly flows, surface tension effects, oil-water separation * Corresponding author: [email protected] Preprint submitted to Ocean Engineering March 15, 2013

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Viscous bubbly flows simulation with an interface SPH
model
N. Greniera,∗, D. Le Touzea, A. Colagrossib,c, M. Antuonob, G.Colicchiob,c
aLUNAM Universite, Ecole Centrale Nantes, LHEEA Lab. (UMR CNRS), Nantes,France
bCNR-INSEAN, The Italian Ship Model Basin, Roma, ItalycCentre of Excellence for Ship and Ocean Structures, CeSOS/AMOS, NTNU,
Trondheim, Norway
Abstract
The multi-fluid SPH formulation by Grenier et al. (2009) is extended to study
practical problems where bubbly flows play an important role for production
processes of the offshore industry. Since these flows are dominated by viscous
and surface tension effects, the proposed formulation includes specific models
of these physical effects and validations on specific benchmark test cases are
carefully performed. The numerical outputs are validated against analytical
and numerical reference solutions, and accuracy and convergence of the
proposed numerical model are assessed. This model is then used to simulate
viscous incompressible bubbly flows of increasing complexity. These flows
include the evolution of isolated bubbles, the merging of two bubbles, and
the separation process in a bubbly flow. In each case, results are compared to
reference solutions and the influence of the Bond number on these interfacial
flow evolutions is investigated in detail.
Key words: SPH, multi-fluid, interfacial flows, non-diffusive interface,
viscous bubbly flows, surface tension effects, oil-water separation
∗Corresponding author: [email protected]
Preprint submitted to Ocean Engineering March 15, 2013

1. Introduction
Multi-fluid flows are found in a large variety of engineering fields: ocean
engineering, oil and gas, aerospace, process, automotive. In many engineering
situations, e.g., mixing/separation, hydrodynamic impact, sloshing, engine
flows, cavitation, etc., multi-fluid flows present strong dynamics resulting
in highly-nonlinear interfacial phenomena: waves, jets, fragmentations,
reconnections. This in turn induces the coexistence of large ranges of
interface scales: from small drops, bubbles, sprays... to the domain scale.
For example, in offshore oil-water separation devices, under flow constraints
the initial bubbles of the mixed flow are fragmented into smaller ones of
radii smaller than one millimeter, before aggregating to the continuous phase
present throughout the whole domain which is more than one meter large
(see Frising et al. (2006) for a review of oil/water separation under
gravity and Laleh et al. (2012) for a review of CFD studies of such
equipment).
Numerical simulation of such flows involving a wide range of interface
scales can be divided into two categories, depending on the chosen method.
In the first category length scales are simulated up to an arbitrary scale
(usually characterizing the concerned flow) and all interface scales below that
arbitrary scale are represented through suitable models. The accuracy of this
approach relies on the models used for the under-resolved interfaces and the
exchange of information between the two levels (that is, the resolved level
and the modeled one) (see e.g. Zhang and Prosperetti (1994), Abdulkadir
and Hernandez-Perez (2010) and Slot et al. (2011) for use of CFD
packages in oil industry).
In the second category, all the interface scales are simulated up to the grid
scale, thus assuming that no interface scale smaller than the grid scale exists.
This second approach is usually referred to as direct numerical simulation
of interfacial flows. Even though it is of simpler implementation since no
2

under-resolved interface model is required, its use is restrained by computer
power, typically requiring a grid scale one order of magnitude smaller than
the smallest interface scale present in the flow (e.g. the smallest bubbles).
As a consequence, direct numerical simulation of engineering problems is
generally out of reach of current simulation tools.
For what concerns the first category, specifically conceived simulations
can be performed to assess the validity of the adopted sub-models (see
e.g. Dijkhuizen et al. (2010) for the comparison of the drag
of a single bubble between Front Tracking simulations and
experiments), especially in the context of interaction of complex
interfaces and turbulence (Vincent et al. (2008) and Duret et al.
(2012)). Further, some authors explored simplified configurations
with several bubbles (see e.g. Bunner and Tryggvason (2003);
Bonometti (2005); Tryggvason et al. (2009)).
In the context of direct numerical simulation, the Smoothed Particle
Hydrodynamics (SPH) method (see, for example, Monaghan (2012),
Violeau et al. (2007), Delorme et al. (2009), Landrini et al. (2012))
presents the key advantage of keeping the interface between two fluids
perfectly sharp, thanks to its Lagrangian nature. In fact, the SPH approach
is based on the representation of any fluid through fluid elements which are
individually followed during their Lagrangian motion, exactly preserving the
amount of matter they represent. This prevents any diffusion of interfaces,
contrary to the schemes commonly used in mesh-based methods, namely
Volume Of Fluid (VOF), Level-Set (LS), Constrained Interpolation Profile
(CIP), etc.
Notwithstanding this advantage, the derivation of a multi-fluid SPH
scheme is not straightforward since one has to carefully handle the evaluation
of the pressure gradient to density ratio in the momentum equation. In
fact, the SPH method relies on a smoothing procedure: each fluid element
3
carries its own physical quantities (e.g. density, velocity, pressure. . . ) and is
associated with a compact support which represents an interaction domain.
All the spatial differential operators are evaluated through a smoothing
procedure on this support. As a consequence, the accuracy in modeling the
discontinuous pressure gradient at an interface worsens close to this interface
since the compact support intersects this surface. Several solutions have
been proposed in the SPH community to address this issue (Tartakovsky
and Meakin (2005), Hu and Adams (2006), Price (2008), Leduc et al. (2010),
Adami et al. (2010), Khayyer and Gotoh (2012)).
A first SPH simulation of bubbly flow was carried out by Das
and Das (2009), even though surface tension effects or viscous
effects had not been carefully validated on academic test cases.
Nevertheless, the simulations of bubbly flows at coarse resolution
were compared to experimental results. Further improvements
of their scheme (with incorporation of a diffuse interface model)
allowed performing simulations with higher density ratios (Das
and Das (2011)) and exploring physical parameters (Das and Das
(2013)) of such bubbly flows. More recently, in Szewc et al.
(2013) the authors performed three dimensional simulations of
single rising bubble using the present scheme and compared their
results to experiments.
In Grenier et al. (2009) a novel SPH scheme was proposed which
overcomes this issue by providing an accurate way to evaluate the pressure
gradient to density ratio close to interfaces. To this purpose, a Shepard
kernel was adopted to recover a sharp discontinuity of the density field, which
is treated phase by phase. About the numerical scheme, we first propose
a slight improvement of the classical formulation for the Laplacian of the
velocity field: it is based on the renormalization of the standard formulation
by Morris et al. (1997) and allows for a more accurate description of the
4

viscous effects. Conversely, the surface tension effects have been modeled
accordingly to Grenier et al. (2009) (adapted from the formulation by Hu
and Adams (2006)).
After these formulations have been introduced, a careful validation of the
proposed scheme is provided on a set of academic test cases. The validation
is also made by comparison to reference solutions and by assessment of the
accuracy and convergence of the proposed method. The proposed numerical
model is then applied to bubbly flows of increasing complexity. The evolution
of isolated bubbles is first studied at low and high Bond numbers, with
comparison to reference analytical and mesh-based method solutions. Then,
the merging of two bubbles is studied and the influence of the surface tension
magnitude investigated in detail, again comparing to reference simulations.
Finally, the role played by surface tension in the oil-water separation process
is analyzed on a simplified configuration where an initial set of bubbles
migrates and merge with an already separated layer of lighter fluid.
2. Numerical model
In the present section we first briefly recall the core part of the numerical
scheme used in the present paper; for a more complete description we address
the reader to the previous work by Grenier et al. (2009). Then, the viscosity
and surface tension modeling are discussed more in depth.
2.1. Governing equations
We consider a set of weakly-compressible immiscible viscous flows. The
global fluid domain Ω is then composed of different fluids A,B, etc., so that
Ω = (A ∪ B ∪ . . .). The flow evolution is governed by the Navier-Stokes
equations and the Lagrangian description is used. All the fluids are assumed
to be barotropic following Tait’s equation of state. The governing equations
5
thus read
ρDu
Dt= −∇p + FV + FS + FB
p =c20X ρ0XγX
[(
ρ
ρ0X
)γX
− 1
]
Dx
Dt= u ;
Dv
Dt= v div(u)
(1)
where X indicates a generic fluid in Ω, and c0X , ρ0X , and γX are, respectively,
its reference sound speed, density, and polytropic constant. x, u, ρ, v, and
p represent, respectively, the displacement, the velocity, the density, the
specific volume, and pressure of a generic material element of fluid X . Finally,
FV,FS,FB indicate viscous, surface tension, and body forces, respectively.
2.2. Discretization
The SPH discretization of system (1) is based on the use of a Shepard
renormalized kernel, and on a density evaluation performed separately on
each fluid so as to maintain a perfectly sharp interface (see Grenier et al.
(2009) for details). The governing equations are discretized in two steps.
First, the density and pressure of particle i are updated from the knowledge
of particle masses (constant in time) and positions through, ∀xi ∈ X
〈ρ〉i =∑
j∈X
mj WSj (xi) ; W S
j (xi) =Wj(xi)
ΓXi
ΓXi =
∑
k∈X Wk(xi)Vk
pi =c20X ρ0XγX
[(〈ρ〉iρ0X
)γX
− 1
]
(2)
where W (xi) is the SPH renormalized Gaussian kernel used in Grenier et al.
(2009) with 3h support radius centered in i (where h is the smoothing length).
6

S denotes the Shepard renormalization of the kernel, and mi the mass of
particle i. In all the following expressions, the summations apply to the
whole kernel support whatever is the fluid within it, unless specified as e.g.
in the definition of ΓXi where the summation applies only to particles of fluid
X .
In the second step, the particle volume Vi, the velocity, and the position
of the considered particle can be marched in time through
DVi
Dt= Vi
∑
j
uji ·∇Wij
Γi
Vj
Γi =∑
k Wik Vk
ρiDui
Dt= −
∑
j
(
piΓi
+pjΓj
)
∇Wij Vj + FVi + FSi + FBi
Dxi
Dt= ui
(3)
where uji = uj − ui and ∇Wij = ∇Wj(xi). Note that this scheme allows
modeling both interfaces and free surfaces, and that ΓXi = Γi if only one fluid
is considered.
2.3. Viscosity modeling
2.3.1. Renormalized Morris et al. formulation
Following Cueille (2005), we use in the present paper a renormalized
version of the Morris et al. (1997) formulation of the Laplacian operator to
model the viscous term FV. This renormalization is performed through the
evaluation of a second-order polynomial function for which the analytical
solution is known
fi(x) = r2i (x) = |x− xi|2 ; ∇2fi(x) = K (4)
7

where K = 4 in two dimensions. The Laplacian of fi(x) evaluated by the
Morris et al. formulation (MEAF) gives
Ki =∑
j
(
1
Γi
+1
Γj
)
xij · ∇Wij
r2ijfij Vj
= −∑
j
(
1
Γi+
1
Γj
)
xij · ∇Wij Vj
(5)
where xij = xi − xj . The renormalization constant is thus equal to K/Ki
and the renormalized MEAF (RMEAF) writes
FVi =K
Ki
∑
j
µij
(
1
Γi
+1
Γj
)
xij · ∇Wij
r2ijuij Vj (6)
2.3.2. Inter-particular dynamic viscosity
The inter-particular dynamic viscosity can be evaluated by using two
different formulas. The former is based on the arithmetic mean between the
viscosity of particles i and j
µij =1
2(µi + µj) (7)
The latter is based on the harmonic mean
µij =2µiµj
µi + µj
(8)
The specific formula used for the interfacial dynamic viscosity has a crucial
influence on the evolution of multi-fluid systems when µi and µj have different
orders of magnitude. If, e.g., µi ≫ µj then Eq. (7) gives µij ≃ µi/2
which is a much larger value than the the harmonic mean given by Eq. (8)
µij ≃ 2µj. This generates important differences in the numerical solution,
see Sec. 3.1.2. On the opposite, formulae (7) and (8) coincide when only one
fluid is considered.
8

2.4. Surface tension modeling
A classical model for modeling surface tension between two fluids is the
Continuous Surface Force model, see e.g. Morris (2000)
FXYSi = σ κ δI nI (9)
where δI is the Dirac function centered on the interface, κ is the local
curvature, and nI is the interface normal. This approach was chosen by
Morris (2000) but is not well suited to the SPH framework since a simple
evaluation of normals is not reliable. To overcome this problem, Hu and
Adams (2006) used a tensorial version of the formulation above. This model
is called Continuous Surface Stress (CSS) and reads
FXYSi = div(TXY
Si ) ∀i ∈ X
TXYSi = σXY 1
|∇Ci|(
|∇Ci|21−∇Ci ⊗∇Ci
)
(10)
where TXYSi is the surface stress tensor and σXY is the surface tension
coefficient between fluids X and Y . For more details, we address the
reader to the work of Grenier et al. (2009).
The CSS model is based on the fact that the interface normal can be
expressed through the color index by nI = ∇C/‖∇C‖. Substituting this
expression in Eq. (10) the tensor TXYS becomes
TXYS = σXY‖∇C‖(1− nI ⊗ nI) (11)
With some algebra, see e.g. Lafaurie et al. (1994), it comes that FXYSi =
div(TXYSi ) is then actually colinear to nI , as in Eq. (9).
As underlined by Morris (2000), a negative pressure can be induced by
the formulation above because of the non-null trace of the tensor TXYS . To
avoid this problem a corrective term was introduced in the CSS formulation
by Hu and Adams (2006). However, in our numerical tests no benefits were
9

obtained from this correction, nor disadvantages. Therefore, for consistency
we preferred to keep formulation (10) free from this correction. Besides, in
absence of the free surface, negative pressures which could occur due to this
surface tension model can be prevented by adding a background pressure to
the equation of state (which is a simpler alternative than implementing a
procedure to control tensile instabilities Monaghan (2000)).
Remark on the equation of state For weakly-compressible flows, the
choice of the speed of sound in the equation of state is driven by
the following condition (see, for example, Grenier et al. (2009)):
c0 > 10 max(|u|)Ω (12)
where the velocity is usually estimated ‘a priori’. For gravity
waves, the fluid velocity u is replaced by the wave celerity (see
Antuono et al. (2011) for more details). For flows driven by surface
tension, this characteristic velocity can be estimated through a
unity Weber number assumption (i.e., We = ρ|u|2R/σ where R is
the characteristic radius of curvature). See the Appendix for a
detailed justification.
2.5. Temporal stability
Following Brackbill et al. (1992), Morris (2000) proposed a restrictive
condition on time steps linked to the surface tension modeling
∆tst ≤ CCFLst
(
min(ρX , ρY) h3
2πσXY
)1/2
(13)
When modeling viscosity an additional constraint linked to diffusion is added,
for each considered fluid
∆tv ≤ CCFLv
ρh2
µ(14)
10

Finally, the acoustic time step restriction linked to the weak compressibility
assumption reads, for each considered fluid
∆tc = CCFLcmin
i
(
h
ci + |ui|
)
(15)
As a consequence, time steps must satisfy for each considered fluid
∆t ≤ min(
∆tst,∆tv,∆tc)
(16)
Usual values for these three Courant numbers are CCFLv= 0.25, CCFLst
= 1.0
and CCFLc= 2.0 when a 4-th order Runge-Kutta time scheme is used.
3. Validation of the viscosity and surface tension models
3.1. Validation of the viscosity model
To validate the viscosity model described in Sec. 2.3, we use the Poiseuille
flow with one and two fluids (see Fig. 1). We consider a laminar viscous flow
in a planar channel of width L. The flow is driven by a pressure gradient
similar to a body force parallel to the channel axis (here the y-axis). To
reach a stationary velocity profile without increasing much the length of the
channel, we consider a periodic domain.
An analytical solution for the velocity profile can be derived. The flow is
parallel to y so that the only non-null component of the velocity field is v.
Boundary and interface conditions are, respectively: v(x = 0) = v(x = L) =
0, and vXI = vYI . For a single fluid flow the stationary velocity profile is
v(x) = −ρg
2µx(L− x) (17)
For a two-fluid flow with fluid X lying between 0 and xI and fluid Y between
xI and L, the solution is
v(x) =ρ(x)g
2µ(x)(x− xI)
2 − τIµ(x)
(x− xI)− vI (18)
11

L0
Fluid X
Velocity Profile
(a) One-fluid flow
xI
fluid Yfluid X
L0
Velocity Profilefluid Y
Velocity Profilefluid X
(b) Two-fluid flow. The
heavier and more viscous fluid
is on the left.
Figure 1: Velocity profiles in Poiseuille flows.
where the interface shear τI and velocity vI are defined by
τI =gxI2
ρXµY − ρYµX
µX + µY
vI =ρYgµY
x2I2 + τI
µY xI
(19)
Velocity profiles are extracted from a region of width equal to the channel
width and thickness equal to the mean particle distance (i.e. ∆x). The
channel is 1m× 1m and particles are initially set on a regular lattice.
The no-slip condition has been implemented through an anti-
symmetric mirroring procedure (see e.g. Macia et al. (2011)). This
choice proved to be good for relatively small Reynolds numbers.
For higher Reynolds number a different approach should be used in
order to avoid the raise of numerical instabilities. For more details
we address the reader to the works of De Leffe et al. (2011) and
Marrone et al. (2013).
12

3.1.1. One-fluid simulation
We consider a fluid with ρX = 1000 kg.m−3, µX = 1000 kg.m−1.s−1, and
choose an external acceleration of magnitude 8m.s−2. Consequently, the
maximum velocity given by Eq. (17) is equal to 1m.s−1, and the related
Reynolds number, based on the width of the channel, is equal to 1.
Accuracy of the different schemes. We set a spatial resolution of 80 particles
in the channel width and compare the viscosity model described in Sec. 2.3,
RMEAF, to three models classically employed in SPH simulations. The first
viscous formulation has been defined in Flekkøy et al. (2000) (FEAF) and
can be adapted to the present SPH formulation as follows:
FVi =∑
j
µij
2
(
1
Γi
+1
Γj
)
[xij ⊗ uij + uij ⊗ xij
r2ij
]
∇Wij Vj (20)
Another classical formulation is the one proposed by Morris et al. (1997)
(MEAF) which reads
FVi =∑
j
µij
(
1
Γi+
1
Γj
)
xij · ∇Wij
r2ijuij Vj (21)
The latter formulation is equivalent to the FEAF if the fluid is incompressible.
The third variant is the Monaghan and Gingold (1983) formulation (MGF)
which, adapted to the present formulation, reads
FVi =∑
j
KMGF
µij
2
(
1
Γi+
1
Γj
)
xij · uij
r2ij∇Wij Vj (22)
where KMGF is respectively equal to 6, 8, and 10 in one, two, and three
dimensions.
The left plot of Fig. 2 displays the relative errors in the velocity profile
at the stationary state, obtained by using the different formulations. All the
four formulations exhibit a constant error in the inner part of the channel
while larger discrepancies are observed near the solid boundaries. The
13

0 0.2 0.4 0.6 0.8 1-0.1
-0.05
0
0.05
0.1
0.15
0.2
y
errV
FEAF
MGF
MEAF
RMEAF
Exact solution
(a) Velocity relative error at t = 3 s
20 40 60 80 100 120 140 160
10-4
10-3
10-2
NerrQ
RMEAF
1st
order
2nd
order
3rd
order
(b) Spatial convergence
Figure 2: Top: relative errors of the different viscous formulations for the Poiseuille flow
at Re = 1. Bottom: spatial convergence obtained for the RMEAF (N is the number of
particles in the channel width).
corresponding root mean square errors are shown in Table 1 and show that
the MEAF is one order of magnitude more accurate than the MGF which, in
turn, is one order of magnitude more accurate than the FEAF. The RMEAF
presents the smallest error, improving the MEAF by 35%.
FEAF MGF MEAF RMEAF
errRMS 2.1 10−2 5.4 10−3 4.3 10−4 2.9 10−4
Table 1: Root-Mean-Square relative errors for the different viscous formulations tested.
In the following, the RMEAF is thus selected as the viscous formulation
of the proposed SPH scheme (see Sec. 2.3). A convergence study has been
carried out with this formulation, by varying the particle number from 20
to 160 along the channel width. The right plot of Fig.2 shows that the
14

convergence obtained with this formulation is close to the second order.
3.1.2. Two-fluid simulation
In this case an interface is present along the channel axis of symmetry,
between a lighter and a heavier fluid. The periodic channel has dimension
0.1m×0.1m, the gravity acceleration has set equal to g = 10.2m.s−2 and the
sound speed is 0.1m.s−1 for both fluids. The main parameters are reported
in Table 2.
Fluid ρ0 µ vm Re
X 1000 5 2.7 10−3 0.027
Y 100 5 10−2 7.7 10−3 0.769
Table 2: Parameters used to simulate the two-fluid Poiseuille flow (in SI units). vm is the
maximum observed velocity on which is based the mentioned Reynolds number Re.
Inter-particular dynamic viscosity. In the present section, we study how the
choice of the inter-particular dynamic viscosity formulation (see Sec. 2.3.2)
influences the accuracy of the simulations. The left plot of Fig. 3 clearly
shows that the relative error on the velocity profile is generally larger when
the arithmetic mean formulation (7) is used. Largest errors are present in the
less viscous fluid Y close to the interface with X . As explained in Sec. 2.3.2,
the use of the arithmetic mean formulation leads the inter-particular viscosity
to be approximately equal to µX/2 and this value is much greater than µY .
This implies that the Y-particles close to the interface are strongly influenced
by the X -particles, because of the SPH interpolation. Conversely, using the
harmonic mean, the X -particles close to the interface are comparatively less
influenced by the Y-particles, since the main contributions in (6) are those
of the neighbor particles belonging to fluid X .
15

0 0.2 0.4 0.6 0.8 1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
x/L
errV
Harmonic mean
Arithmetic mean
20 40 60 80 100 120 140 16010-4
10-3
10-2Present formulation
1st order
2nd order
3rd order
errRMS
N/L
Figure 3: Top: velocity relative error at t = 10 s, depending on the inter-particular viscosity
formulation used. Bottom: spatial convergence when using the harmonic mean formulation
(N is the number of particles in the channel width).
Concluding, the use of the harmonic mean formulation allows a better
global accuracy. The mean error throughout the channel width is about
0.2% versus 6% for the arithmetic mean formulation, while the RMS error
is 0.1% against 1.6%. The spatial convergence obtained with the harmonic
mean formulation is plotted in the right part of Fig. 3, showing again a
close-to-second-order convergence.
3.2. Validation of the surface tension model
The present section deals with the validation of the CSS surface tension
scheme developed in Sec. 2.4.
3.2.1. Parasitic currents in the static bubble case
Before any further analysis, we focus on a numerical issue related to the
use of the CSS scheme which has been widely documented in the literature:
the generation of parasitic currents at the interface, see, e.g., Brackbill et al.
16

(1992); Lafaurie et al. (1994). As already pointed out by Morris (2000),
these currents can lead to spurious deformations of the interface because of
the Lagrangian nature of the SPH scheme.
Note that in the literature several corrections have been proposed to
tackle this problem, in the framework of other numerical methods, see,
e.g., Popinet and Zaleski (1999); Torres and Brackbill (2000); Renardy and
Renardy (2002); Francois et al. (2006); Popinet (2009). The best strategies
seem to rely on an improved evaluation of the pressure gradient and
of the surface tension model and, at the same time, on a accurate
estimation of the local curvature. Future works will be devoted
to reduce such parasitic currents. In any case, we highlight that
they did not induce any appreciable inaccuracy in the applicative examples
considered here. Then, we simply quantify their strength without applying
any countermeasure. We first consider a static bubble without external
forces. Starting from the rest conditions, the equilibrium state is reached
when the surface tension volume force is balanced by the pressure gradient.
Configuration. The chosen configuration is identical to the one used in
Renardy and Renardy (2002). The computational domain size is 1m× 1m,
the space resolution is identical in both directions. The fluid bubble is a
disk centered at the middle of the computational domain and its radius is
equal to R = 0.125m. The bubble is surrounded by a fluid of same density
(ρ = 4kg.m−3) and same dynamic viscosity (µ = 1 kg.m−1.s−1) while the
surface tension coefficient is equal to σ = 0.357N.m−1. The equation of state
is linearized and the sound speed is set equal to 10m.s−1 for both fluids.
Spatial convergence. The spatial convergence of these parasitic currents is
analyzed by studying their velocity magnitude in different norms (namely,
N∞, N2, N1). Table 3 summarizes the results and shows that the magnitude
of the parasitic currents does not decay with the spatial refinement, whatever
is the norm used. A very slow convergence is observed for the N1 and N2
17

norms, and no convergence at all for the N∞ norm. This fact is illustrated
in Fig. 4 for two different spatial resolutions.
∆x/L N∞ N2 N1
1/96 1.87 10−2 1.61 10−3 3.38 10−4
1/128 1.86 10−2 1.14 10−3 2.33 10−4
1/160 2.50 10−2 1.36 10−3 2.63 10−4
1/192 1.81 10−2 1.18 10−3 2.48 10−4
Table 3: Magnitude (in m.s−1) of the parasitic current velocities at t = 2× 10−3 s for
different vectorial norms. ∆x indicates the mean inter-particle distance while L is the
fluid domain width.
This issue was also studied by Renardy and Renardy (2002) who applied
the CSS method within a Volume-Of-Fluid scheme and found a similar
behavior in terms of convergence (decrease of N1 and N2, and no decrease of
N∞). In any case, the behavior of the present scheme in terms of parasitic
currents is of relatively little importance, since they have no appreciable
influence on the dynamic test cases studied hereinafter.
For what concerns the pattern of the spurious vortices generated, it differs
from the one shown in Renardy and Renardy (2002) for both their magnitude
and their number. This is likely caused by the lower spatial accuracy of
the SPH interpolation in the estimation of curvature with respect to the
Volume-Of-Fluid method (the work of Francois et al. (2006) underlines the
importance of the numerical estimation of curvature).
3.2.2. Oscillating droplet
To study the accuracy of the surface tension model, we perform the test of
an oscillating droplet described in Hu and Adams (2006), where no external
force is present. In this configuration, the surface tension effects are balanced
18
-0.1 0 0.1
-0.15
-0.1
-0.05
0
0.05
0.1
0.150.025
x
y
(a) Resolution ∆x/L = 1/96
-0.1 0 0.1
-0.15
-0.1
-0.05
0
0.05
0.1
0.150.025
y
x
(b) Resolution ∆x/L = 1/192
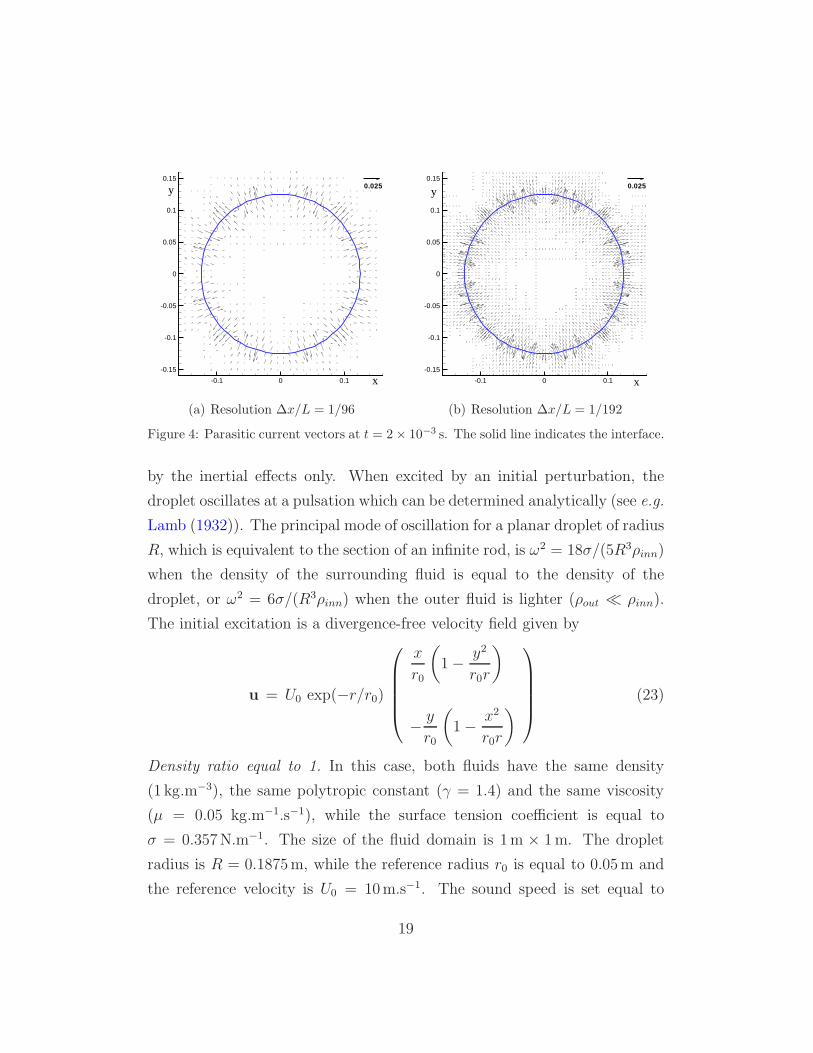
Figure 4: Parasitic current vectors at t = 2× 10−3 s. The solid line indicates the interface.
by the inertial effects only. When excited by an initial perturbation, the
droplet oscillates at a pulsation which can be determined analytically (see e.g.
Lamb (1932)). The principal mode of oscillation for a planar droplet of radius
R, which is equivalent to the section of an infinite rod, is ω2 = 18σ/(5R3ρinn)
when the density of the surrounding fluid is equal to the density of the
droplet, or ω2 = 6σ/(R3ρinn) when the outer fluid is lighter (ρout ≪ ρinn).
The initial excitation is a divergence-free velocity field given by
u = U0 exp(−r/r0)
x
r0
(
1− y2
r0r
)
− y
r0
(
1− x2
r0r
)
(23)
Density ratio equal to 1. In this case, both fluids have the same density
(1 kg.m−3), the same polytropic constant (γ = 1.4) and the same viscosity
(µ = 0.05 kg.m−1.s−1), while the surface tension coefficient is equal to
σ = 0.357N.m−1. The size of the fluid domain is 1m × 1m. The droplet
radius is R = 0.1875m, while the reference radius r0 is equal to 0.05m and
the reference velocity is U0 = 10m.s−1. The sound speed is set equal to
19
23m.s−1. To prevent the occurrence of negative values of the pressure field
and the generation of a tensile instability (cf. the work of Swegle et al.
(1995)), a background pressure value is imposed (for this test case this value
is set equal to 50Pa).
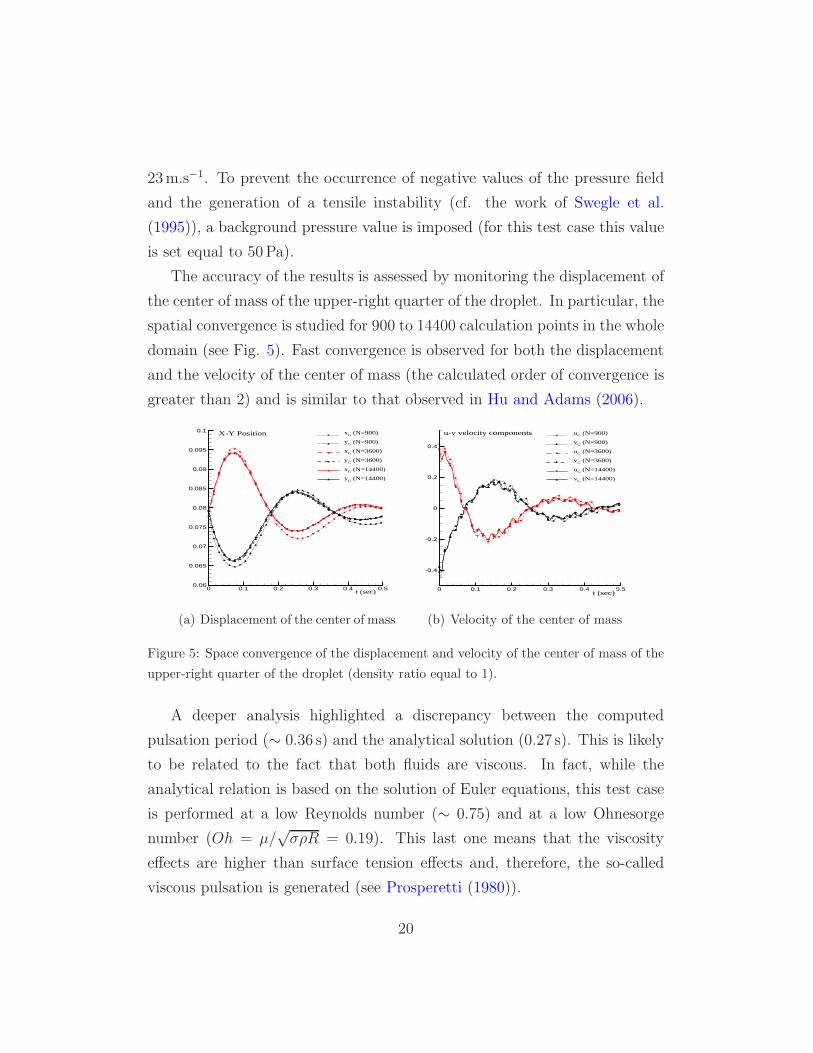
The accuracy of the results is assessed by monitoring the displacement of
the center of mass of the upper-right quarter of the droplet. In particular, the
spatial convergence is studied for 900 to 14400 calculation points in the whole
domain (see Fig. 5). Fast convergence is observed for both the displacement
and the velocity of the center of mass (the calculated order of convergence is
greater than 2) and is similar to that observed in Hu and Adams (2006).
0 0.1 0.2 0.3 0.4 0.50.06
0.065
0.07
0.075
0.08
0.085
0.09
0.095
0.1 xG (N=900)
yG (N=900)
xG (N=3600)
yG (N=3600)
xG (N=14400)
yG (N=14400)
X-Y Position
t (sec)
(a) Displacement of the center of mass
0 0.1 0.2 0.3 0.4 0.5
-0.4
-0.2
0
0.2
0.4
uG (N=900)
vG (N=900)
uG (N=3600)
vG (N=3600)
uG (N=14400)
vG (N=14400)
u-v velocity components
t (sec)
(b) Velocity of the center of mass
Figure 5: Space convergence of the displacement and velocity of the center of mass of the
upper-right quarter of the droplet (density ratio equal to 1).
A deeper analysis highlighted a discrepancy between the computed
pulsation period (∼ 0.36 s) and the analytical solution (0.27 s). This is likely
to be related to the fact that both fluids are viscous. In fact, while the
analytical relation is based on the solution of Euler equations, this test case
is performed at a low Reynolds number (∼ 0.75) and at a low Ohnesorge
number (Oh = µ/√σρR = 0.19). This last one means that the viscosity
effects are higher than surface tension effects and, therefore, the so-called
viscous pulsation is generated (see Prosperetti (1980)).
20

High density ratio. The density and viscosity of the inner fluid are now equal
to 1 kg.m−3 and µinn = 5 10−2 kg.m−1.s−1 while those of the outer fluid are
10−3 kg.m−3 and µout = 5× 10−4 kg.m−1.s−1. The polytropic coefficient γ is
equal to 1.4 for both fluids and the radius of the droplet is equal to 0.2m. To
decrease the viscosity effects (here Oh = 0.1), the initial velocity is set equal
to 1m.s−1 while r0 = 0.05m. The sound speed is chosen equal to 40m.s−1
and the background pressure equal to 50Pa.
0.6 0.8 1 1.2 1.40
0.05
0.1
0.15
0.2
0.25
0.3
0.35 τ(s), errτ
σ
Analytical Solution
Present Model
Relative Error
0.010.020.030.040.05
0.02
0.04
0.06
0.08
0.1
0.12
0.14
errτ
h (m)
Present Model
1st order
2nd order
Figure 6: Top: Comparison between the analytical and computed oscillating periods of
the oscillating bubble (high density ratio). Bottom: spatial convergence.
The numerical results are presented in Fig. 6. The pulsation of the
droplet predicted by the SPH solution is relatively close to the analytical
one, with a relative error within 3%. In the right plot of the same figure
the spatial convergence rate is evaluated showing that the present model
lies between first- and second-order of convergence. This further confirms
that the implementation of the CSS scheme in the present model allows
reproducing satisfactorily surface tension effects (this is not the case for
parasitic currents where convergence was not observed but do not play a
significant role in the bubbly flows simulated hereinafter).
21

4. Simulation of bubbly flows
4.1. Terminal rise velocity of a single bubble at low Bond number
The evolution of the rising velocity of a buoyant bubble of radius R =
1.6 cm in a fluid column at rest is now studied. After an initial transitory
stage, a steady state is reached when buoyant and drag forces get balanced.
The calculation domain is sufficiently wide (L/R = 20) to avoid blocking
effects (moreover, a free-slip condition is applied on the domain boundaries)
while it is high enough (H/R = 120) to allow the bubble to travel for several
radius lengths after it has reached its terminal rise velocity.
The surrounding fluid is denoted by X , and the fluid inside the bubble by
Y . The bubble fluid viscosity is chosen high enough to ensure that the flow
inside the bubble is numerically stable. The two fluid densities and viscosities
are provided in Table 4.
Fluid ρ0 [kg.m−3] µ [kg.m−1.s−1]
X 40 0.1429
Y 1 0.1
Table 4: Low-Bo rising bubble. Fluid densities and viscosities.
The surface tension coefficient is equal to σ = 1 N.m−1, the gravity
acceleration is g = 9.81m.s−2, while the background pressure is taken equal to
750Pa to avoid tensile instability. The Reynolds number Re =√
(2R)3g/νX
is equal to 5, implying that the viscous forces are quite high. The surface
tension effects are also rather large, Bo = ρXg(2R)2/σ = 0.4, so that the
bubble profile keeps cylindrical. The bubble rising velocity is defined as the
velocity of its center of gravity. The latter one is evaluated as follows:
uG =
∑
i∈Y miui∑
i∈Y mi
22

4.1.1. Numerical results
The spatial convergence is studied by using the following resolutions:
h1 = 8.48× 10−3m, h2 = h1/2, and h3 = h1/4. In Fig. 7 we observe that,
0 0.5 1 1.5 2 2.5 3 3.5 4
0
0.05
0.1
0.15
0.2
0.25
vc ∞
vG (m/s)
t(sec)
R / h = 2
R/ h = 4
R/ h = 8
Figure 7: Low-Bo rising bubble. Spatial convergence of the rise velocity evolution.
for all the resolutions, the velocity converges toward an asymptotic value,
i.e. the terminal rise velocity. For this kind of configuration the dynamic
force applied by the surrounding fluid on the bubble can be compared to
the one applied on an infinite rigid cylinder in a constant velocity flow
without gravity. For a sphere, Lamb (1932) shows that the ratio between
the force applied by fluid X on a rigid solid sphere and the one applied by
the same fluid on a spherical bubble of fluid Y of the same radius is equal
to (2µX + 3µY)/(3µX + 3µY). Then, for a spherical bubble, the force ranges
in two thirds to one time the force acting on a solid sphere, depending on
the viscosity ratio between the two fluids. With the viscosities chosen here,
the force on a spherical bubble would be 80% of the one on a rigid sphere.
Unfortunately, for a cylinder the theoretical analysis of Lamb applies only to
23

-0.1 0 0.10.9
0.95
1
1.05
1.1
1.15
0.180.160.140.120.10.080.060.040.02
t=4.8 s
x (m)
y (m)| u | (m/s)
(a) Wake of the rising bubble at t = 4.8 s.
t=1s
t=3s
X-0.02 -0.01 0 0.01 0.02
t=5s
(b) Interface deformations at various
times. Same scale in both directions.
Figure 8: Low-Bo rising bubble. The spatial resolution used is h2.
a rigid body. The force exerted by the surrounding fluid in that case can be
expressed as follows (see Lamb (1932)):
Fc∞ =4πµXuc∞
1
2− γ − ln
(
Ruc∞ρX4µX
) (24)
where γ is the Euler constant, γ ≃ 0.577. By solving the stationary
momentum equation, that is πR2g(ρX − ρY) = Fc∞, a numerical
approximation of the terminal rise velocity is found. In the specific case
under investigation, one obtains Vc∞ = 0.22m.s−1. This value is reported in
Fig. 7, showing to be very close to the converged value of the numerical
simulations. As stated before, the terminal rise velocity is expected to
be slightly smaller than the theoretical one predicted for a rigid cylinder.
Further, Lamb’s solution applies to a strongly laminar flow, i.e. Re < 1, and
this assumption is not exactly respected here (where Re = 5). In fact, a small
flow separation occurs past the cylinder (see Fig. 8(a)). Nonetheless, the
good agreement between the converged value and the theoretical one confirms
that the magnitude of the computed terminal rise velocity is realistic.
In Fig. 8(b) the interface deformations at various times are displayed.
24

Y
X
Y
1.5
0.35
0.65
0 0.5 1.0
1.5R
R= 0.1
Figure 9: Two merging bubbles for Bo = ∞. Left: initial configuration. Middle and right:
contours of the vertical velocity at t = 1.90√
R/g and t = 3.16√
R/g of the present SPH
scheme.
The slight x-displacement is due to the weak non-stationarity of the flow
which induces random horizontal displacements. Nevertheless, the bubble
keeps approximately circular, proving the ability of the CSS scheme to
reproduce high surface tension effects.
4.2. Merging of two bubbles
In this section we deal with the merging of two bubbles of a light fluid
within an heavy one. A sketch of the configuration is displayed in the left
panel of Fig. 9. Both bubbles are initially set close to each other and
the upper bubble is larger than the lower one. As a consequence, during their
buoyant motion the upper bubble sucks the lower one up until it finally splits
into two parts( ee the middle and right panels of Fig. 9, for Bo = ∞). This
leads to the generation of two fluid ejections from the lower bubble which
become thinner and thinner during the evolution (see Fig. 10).
This test case was repeated using different Bond numbers (as defined in
the previous section and based on the radius R of the smallest bubble) and the
25
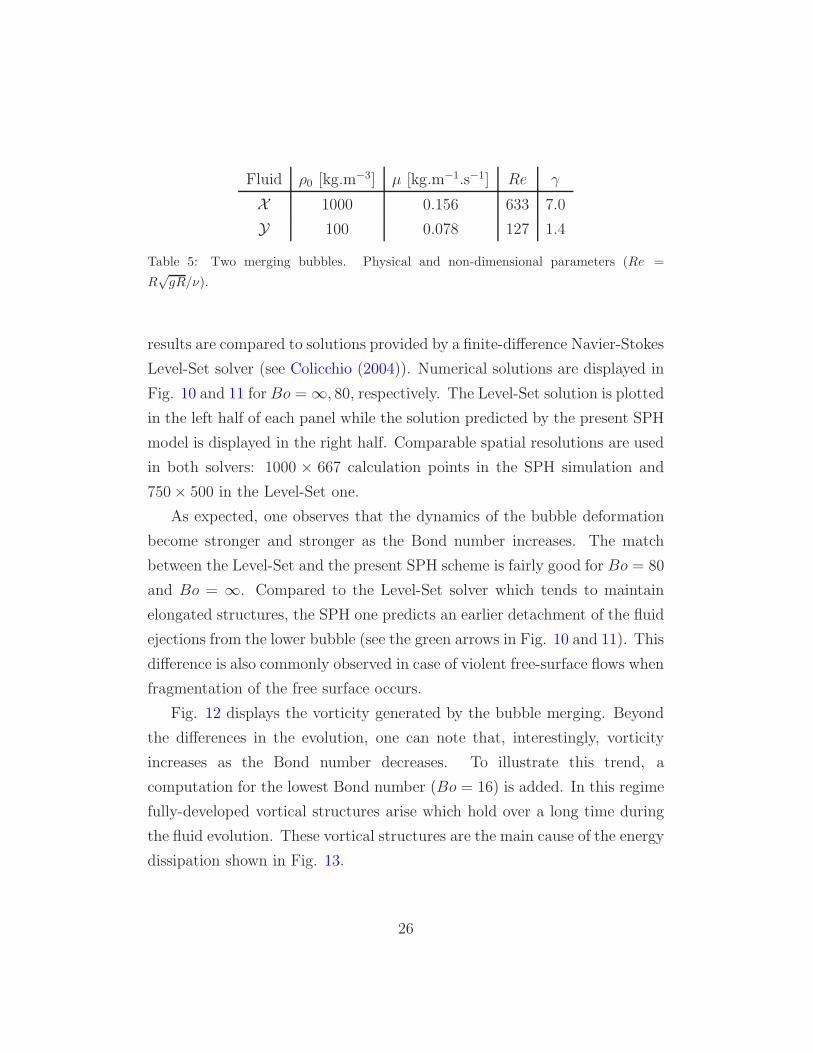
Fluid ρ0 [kg.m−3] µ [kg.m−1.s−1] Re γ
X 1000 0.156 633 7.0
Y 100 0.078 127 1.4
Table 5: Two merging bubbles. Physical and non-dimensional parameters (Re =
R√gR/ν).
results are compared to solutions provided by a finite-difference Navier-Stokes
Level-Set solver (see Colicchio (2004)). Numerical solutions are displayed in
Fig. 10 and 11 for Bo = ∞, 80, respectively. The Level-Set solution is plotted
in the left half of each panel while the solution predicted by the present SPH
model is displayed in the right half. Comparable spatial resolutions are used
in both solvers: 1000 × 667 calculation points in the SPH simulation and
750× 500 in the Level-Set one.
As expected, one observes that the dynamics of the bubble deformation
become stronger and stronger as the Bond number increases. The match
between the Level-Set and the present SPH scheme is fairly good for Bo = 80
and Bo = ∞. Compared to the Level-Set solver which tends to maintain
elongated structures, the SPH one predicts an earlier detachment of the fluid
ejections from the lower bubble (see the green arrows in Fig. 10 and 11). This
difference is also commonly observed in case of violent free-surface flows when
fragmentation of the free surface occurs.
Fig. 12 displays the vorticity generated by the bubble merging. Beyond
the differences in the evolution, one can note that, interestingly, vorticity
increases as the Bond number decreases. To illustrate this trend, a
computation for the lowest Bond number (Bo = 16) is added. In this regime
fully-developed vortical structures arise which hold over a long time during
the fluid evolution. These vortical structures are the main cause of the energy
dissipation shown in Fig. 13.
26

0.2 0.3 0.4 0.5 0.6 0.7 0.8
0.3
0.4
0.5
0.6
0.7
0.8
0.9
t (g/R)½ = 0.63y
x 0.2 0.3 0.4 0.5 0.6 0.7 0.8
0.3
0.4
0.5
0.6
0.7
0.8
0.9
t (g/R)½ = 1.27y
x
0.2 0.3 0.4 0.5 0.6 0.7 0.8
0.3
0.4
0.5
0.6
0.7
0.8
0.9
t (g/R)½ = 1.90y
x 0.2 0.3 0.4 0.5 0.6 0.7 0.8
0.3
0.4
0.5
0.6
0.7
0.8
0.9
t (g/R)½ = 2.53y
x
0.2 0.3 0.4 0.5 0.6 0.7 0.8
0.3
0.4
0.5
0.6
0.7
0.8
0.9
t (g/R)½ = 2.85y
x 0.2 0.3 0.4 0.5 0.6 0.7 0.8
0.3
0.4
0.5
0.6
0.7
0.8
0.9
t (g/R)½ =3.16y
x
Figure 10: Two merging bubbles for Bo = ∞. Left half of each panel: Navier-Stokes
Level-Set solver. Right half of each panel: present SPH model. Green arrows point out
the detachment of fluid ejections.
27

0.2 0.3 0.4 0.5 0.6 0.7 0.8
0.3
0.4
0.5
0.6
0.7
0.8
0.9
t (g/R)½ = 0.63y
x 0.2 0.3 0.4 0.5 0.6 0.7 0.8
0.3
0.4
0.5
0.6
0.7
0.8
0.9
t (g/R)½ = 1.27y
x
0.2 0.3 0.4 0.5 0.6 0.7 0.8
0.3
0.4
0.5
0.6
0.7
0.8
0.9
t (g/R)½ = 1.90y
x 0.2 0.3 0.4 0.5 0.6 0.7 0.8
0.3
0.4
0.5
0.6
0.7
0.8
0.9
t (g/R)½ = 2.53y
x
0.2 0.3 0.4 0.5 0.6 0.7 0.8
0.3
0.4
0.5
0.6
0.7
0.8
0.9
t (g/R)½ = 2.85y
x 0.2 0.3 0.4 0.5 0.6 0.7 0.8
0.3
0.4
0.5
0.6
0.7
0.8
0.9
t (g/R)½ = 3.16y
x
Figure 11: Two merging bubbles for Bo = 80. Left half of each panel: Navier-Stokes
Level-Set solver. Right half of each panel: present SPH model. The green arrow points
out the detachment of fluid ejections, occurring only with the SPH model.
28

Figure 12: Two merging bubbles. Vorticity field for different Bond numbers predicted by
the present SPH scheme.
0 1 2 3 4 5 6
-10.00
-8.00
-6.00
-4.00
-2.00
0.00
(EMEK - EMEK0) / (EMEK0 - EMEK f ) %
t(g/R)½
Bo = ∞
Bo = 80
Bo = 16
Figure 13: Two merging bubbles. Mechanical energy evolution of the present SPH scheme.
EMEKf is associated with the configuration in which the fluid Y lies above the fluid Xand both fluids are still.
29
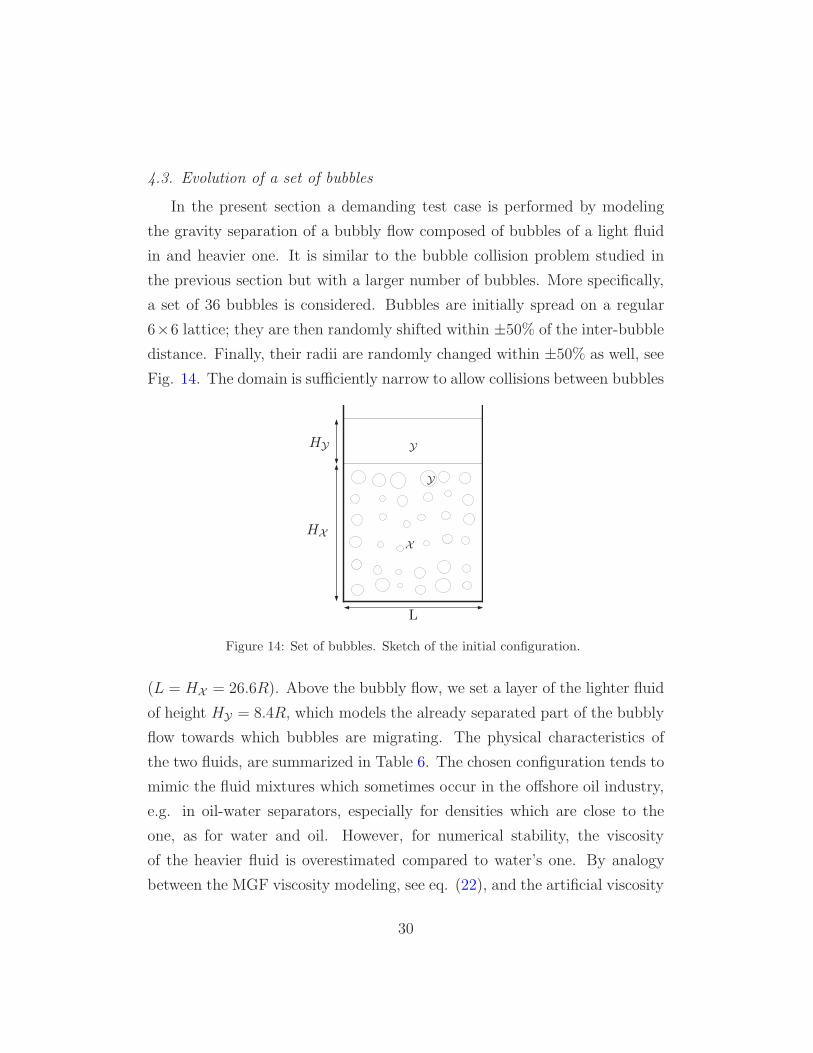
4.3. Evolution of a set of bubbles
In the present section a demanding test case is performed by modeling
the gravity separation of a bubbly flow composed of bubbles of a light fluid
in and heavier one. It is similar to the bubble collision problem studied in
the previous section but with a larger number of bubbles. More specifically,
a set of 36 bubbles is considered. Bubbles are initially spread on a regular
6×6 lattice; they are then randomly shifted within ±50% of the inter-bubble
distance. Finally, their radii are randomly changed within ±50% as well, see
Fig. 14. The domain is sufficiently narrow to allow collisions between bubbles
X
Y
Y
L
HX
HY
Figure 14: Set of bubbles. Sketch of the initial configuration.
(L = HX = 26.6R). Above the bubbly flow, we set a layer of the lighter fluid
of height HY = 8.4R, which models the already separated part of the bubbly
flow towards which bubbles are migrating. The physical characteristics of
the two fluids, are summarized in Table 6. The chosen configuration tends to
mimic the fluid mixtures which sometimes occur in the offshore oil industry,
e.g. in oil-water separators, especially for densities which are close to the
one, as for water and oil. However, for numerical stability, the viscosity
of the heavier fluid is overestimated compared to water’s one. By analogy
between the MGF viscosity modeling, see eq. (22), and the artificial viscosity
30

Fluid ρ0 [kg.m−3] µ [kg.m−1.s−1]
X 1000 0.007
Y 800 0.0065
Table 6: Set of bubbles. Physical parameters.
of Monaghan (1992), one can found a relation between the physical viscosity
and the artificial viscosity parameter which ensures stable simulations.
The mean radius of bubbles is chosen equal to 1mm. This value is
a bit larger than the one found in actual separators of the offshore oil
industry (the biggest radii are close to 400 µm), but this allows us to
perform simulations of the water-oil separation process with less numerical
discretization constraints. The corresponding mean Reynolds number is 40.
Since the aim of the present investigation is not to study the interactions
between walls and bubbles, a free slip condition is imposed along the walls.
4.3.1. Influence of the Bond number
In the present section the influence of the surface tension on the separation
phenomenon is investigated. To do so, the Bond number is varied while
all the remaining parameters are kept constant. The Bond number based
on the minimal radius (i.e. 5× 10−4 m) ranges from 12.5 to 0.125, which
corresponds to σ ranging from 7.85× 10−4N.m−1 to 7.85× 10−2N.m−1. The
smoothing length is h = 10−4m.
By closely looking at Fig. 15, one can observe that the bubble rising
velocity is larger at low Bo numbers. This behavior is due to the fact that
the bubbles shape tends to remain circular. On the contrary, when the
surface tension is small, bubbles tend to stretch in the direction transverse
to their rising direction, i.e. they stretch horizontally. This change in shape
induces an increase in their drag. Actually, as already shown in Fig. 12,
the bubbles characterized by an elongated shape tend to drag a larger zone
31

Figure 15: Bubbly flow in a simplified closed oil-water separator. Density field at different
times for different Bond number.
of separated flow which slows them down. This effect is complemented by
the fact that, when two circular bubbles are merging, they result in a bigger
circular bubble with higher buoyancy and lower relative drag which tends to
rise faster towards the light fluid layer.
Regarding the bubble coalescence occurring during the simulations,
it is interesting to check whether this should physically occur in the
chosen configuration. To this purpose, one can the compare the
interaction time between two bubbles just before coalescence, namely tI =
32

√
π2 ρXCMd3/(48σ), to the characteristic drainage time tD = ρXVad2/(8σ)
(see Bonometti (2005); Kamp et al. (2001)). Here, CM is the added mass
coefficient predicted by the potential theory for two spheres of the same radius
in contact and aligned in the direction of the flow (specifically, CM = 0.803)
while Va is the velocity of approach of coalescing bubbles. The latter one
is calculated numerically by comparing inter-bubble distances at different
times. Using these definitions, we find that tI is always at least one order of
magnitude bigger than tD for all the considered Bond numbers. This means
that we are simulating a flow regime in which coalescence actually occur.
4.3.2. Quasi-infinite Bond number simulation
When simulating infinite Bond number flows, strong mixing occurs
between elements of the distinct fluids. To prevent mixing at the scale of
the fluid elements (that is, particles), a correction based on inter-particle
repulsive forces is introduced accordingly to the work of Grenier et al. (2009).
The coefficient used for this correction is ǫI = 10−3 (see Grenier et al. (2009)
for more details) while the smoothing length is h = 10−4m.
Figure 16 displays strong deformations of the bubble interfaces. The
bubble shape is much more affected by the surrounding flow than in the
previous simulation (see Fig. 15), even in comparison with the highest
Bond number (i.e. Bo = 12.5). This results in the formation of elongated
structures and in a much more complex mixing interface.
5. Conclusion
The multi-fluid scheme introduced in Grenier et al. (2009) is extended
and applied to study bubbly flows. A viscous formulation based on the
renormalization of the Morris et al. (1997) formula is introduced. This
formulation proves to be more accurate that the other formulations classically
used by SPH practitioners. This is illustrated on one- and two-fluid Poiseuille
flows, where a second-order convergence is obtained. A surface tension model
33

Figure 16: Bubbly flow in a simplified closed oil-water separator. Density field at different
times for a quasi-infinite Bond number.
is also proposed. This is based on a continuous surface stress approach and it
is also carefully validated on classical bubble oscillation test cases. Linear to
second-order convergence is obtained on these test cases. Parasitic currents
are also investigated.
In the second part, bubbly flows of increasing complexity are studied.
First, the buoyant rise of a single bubble at low Bond number is investigated.
Convergence is obtained to a reference analytical solution. Then, the collision
of two bubbles is examined in detail. The bubble merging process is compared
to a Level-set Navier-Stokes solver solution for different Bond numbers,
showing comparable results except for the fragmentation of elongated
structures. The vorticity field induced by this process is also inspected.
Finally, the gravity separation of a bubbly oil-water flow is studied. The
34

proposed method enables us to accurately simulate such flows even at low
resolution, since the Lagrangian nature of the SPH method allows preserving
a perfectly-sharp interface during the evolution.
Further work will concern more realistic validations with comparisons
between tree-dimensional simulations and experiments.
Acknowledgements
The research leading to these results has received funding from the
European Community’s Seventh Framework Programme (FP7/2007-2013)
under grant agreement n.225967 “NextMuSE”.
This work has been also partially funded by the Centre of Excellence
CeSOS/AMOS, NTNU, Norway.
A. Equation of state
The continuum system (1) corresponds to the compressible
Navier-Stokes equations with an isentropic equation of state (EOS)
as a closure law. This is essentially a hyperbolic system which
propagates information at a characteristic velocity |u| + c, where c
is the speed of sound. For an easy and efficient parallelization, the
time forwarding scheme must be explicit and, then, its stability is
restricted by the Courant-Friedrichs-Lewy condition based on the
aforementioned characteristic velocity.
For real compressible fluids in subsonic flows (i.e., c is real
and |u| < c), this condition leads to huge computational costs. A
possible solution is to use a weakly-compressible approach. This
consists in the following bound on the density variation, ∆ρ:
∆ρ
ρ0≪ 1 (25)
35

To link the above condition to the speed of sound, we consider the
isotherm compressibility of a general EOS:
χT =1
ρ
(
∂ρ
∂p
)
T
. (26)
Approximating this later definition through small variations,
equation (25) can be rewritten as follows:
χT∆p ≪ 1 . (27)
This later expression underlines that the artificial compressibility
of the fluid must be compatible with the magnitude of the expected
pressure variations inside the flow.
For the chosen EOS (Tait’s equation), this isotherm
compressibility is equal to:
χT =1
ρc20
(
ρ
ρ0
)γ−1
≃ 1
ρ0c20(28)
where the last term has been approximated by using the initial
reference density ρ0.
Most of SPH practitioner are interested in flows in which
the highest pressure variations are of magnitude of the dynamic
pressure ρ0|u|2. With this assumption and Tait’s EOS, the relation
(27) gives:|u|2c20
≪ 1 (29)
which is the classical assumption for SPH simulations.
If we are interested in gravity-based flows, highest pressure
variations can be of magnitude of the hydrostatic pressure ρ0gH
(where H is the reference water depth). With this assumption and
Tait’s EOS, the relation (27) gives:
gH
c20≪ 1. (30)
36

If we are interested in surface tension-driven flows, the pressure
variations are of magnitude of the Laplace law pressure 2σ/R
(where R is the characteristic radius of curvature). This leads
to:2σ
ρ0c20R
≪ 1. (31)
The conditions (29), (30) and ((31) are used to estimate ‘a
priori ’ the speed of sound of the fluid.
References
Abdulkadir, M., Hernandez-Perez, V., 2010. The effect of mixture velocity
and droplet diameter on oil-water separator using computational fluid
dynamics (cfd). World Academy of Science, Engineering and Technology
37, 35–43.
Adami, S., Hu, X., Adams, N., 2010. A new surface-tension formulation for
multi-phase sph using a reproducing divergence approximation. Journal of
Computational Physics 229, 5011 – 5021.
Antuono, M., Colagrossi, A., Marrone, S., Lugni, C., 2011. Propagation
of gravity waves through an SPH scheme with numerical diffusive terms.
Computer Physics Communications 182, 866 – 877.
Bonometti, T., 2005. Developpement d’une methode de simulation
d’ecoulements a bulles et a gouttes. Ph.D. thesis. Institut National
Polytechnique de Toulouse, France. Ph.D. thesis (in French).
Brackbill, J.U., Kothe, D.B., Zemach, C., 1992. A continuum method for
modeling surface tension. Journal of Computational Physics 100, 335–354.
37

Bunner, B., Tryggvason, G., 2003. Effect of bubble deformation on the
properties of bubbly flows. Journal of Fluid Mechanics 495, 77–118.
Colicchio, G., 2004. Violent disturbance and fragmentation of free surfaces.
Ph.D. thesis. University of Southampton.
Cueille, P.V., 2005. Modelisation par SPH des phenomenes de diffusion
presents dans un ecoulement fluide. Ph.D. thesis. INSA Toulouse. Ph.D.
thesis (in French).
Das, A., Das, P., 2009. Bubble evolution through submerged orifice
using smoothed particle hydrodynamics: Basic formulation and model
validation. Chemical Engineering Science 64, 2281 – 2290.
Das, A.K., Das, P.K., 2011. Incorporation of diffuse interface in smoothed
particle hydrodynamics: Implementation of the scheme and case studies.
International Journal for Numerical Methods in Fluids 67, 671–699.
Das, A.K., Das, P.K., 2013. Bubble evolution and necking at a submerged
orifice for the complete range of orifice tilt. AIChE Journal 59, 630–642.
De Leffe, M., Le Touze, D., Alessandrini, B., 2011. A modified no-
slip condition in weakly-compressible SPH, in: 6th SPHERIC workshop,
Hamburg, Germany.
Delorme, L., Colagrossi, A., Souto-Iglesias, A., Zamora-Rodrguez, R., Bota-
Vera, E., 2009. A set of canonical problems in sloshing, part i: Pressure
field in forced rollcomparison between experimental results and sph. Ocean
Engineering 36, 168 – 178.
Dijkhuizen, W., Roghair, I., Annaland, M.V.S., Kuipers, J., 2010. Dns of gas
bubbles behaviour using an improved 3d front tracking modeldrag force on
isolated bubbles and comparison with experiments. Chemical Engineering
Science 65, 1415 – 1426.
38
Duret, B., Luret, G., Reveillon, J., Menard, T., Berlemont, A., Demoulin, F.,
2012. Dns analysis of turbulent mixing in two-phase flows. International
Journal of Multiphase Flow 40, 93 – 105.
Flekkøy, E., Coveney, P., de Fabritiis, G., 2000. Foundations of dissipative
particle dynamics. Physical Review E 62, Issue 2, 2140-2157.
Francois, M.M., Cummins, S.J., Dendy, E.D., Kothe, D.B., Sicilian,
J.M., Williams, M.W., 2006. A balanced-force algorithm for continuous
and sharp interfacial surface tension models within a volume tracking
framework. Journal of Computational Physics 213, 141 – 173.
Frising, T., Nok, C., Dalmazzone, C., 2006. The liquid/liquid sedimentation
process: From droplet coalescence to technologically enhanced water/oil
emulsion gravity separators: A review. Journal of Dispersion Science and
Technology 27, 1035–1057.
Grenier, N., Antuono, M., Colagrossi, A., Touze, D.L., Alessandrini, B.,
2009. An hamiltonian interface SPH formulation for multi-fluid and free
surface flows. Journal of Computational Physics 228, 8380 – 8393.
Hu, X., Adams, N., 2006. A multi-phase SPH method for macroscopic and
mesoscopic flows. Journal of Computational Physics 213, 844 – 861.
Kamp, A., Chesters, A., Colin, C., Fabre, J., 2001. Bubble coalescence in
turbulent flows: A mechanistic model for turbulence-induced coalescence
applied to microgravity bubbly pipe flow. International Journal of
Multiphase Flow 27-8, 1363–1396.
Khayyer, A., Gotoh, H., 2012. A consistent particle method for simulation
of multiphase flows with high density ratios, in: 7th SPHERIC workshop,
Prato, Italy.
39

Lafaurie, B., Nardone, C., Scardovelli, R., Zaleski, S., Zanetti, G., 1994.
Modelling merging and fragmentation in multiphase flows with surfer.
Journal of Computational Physics 113, Issue 1, 134–147.
Laleh, A.P., Svrcek, W.Y., Monnery, W.D., 2012. Design and cfd studies
of multiphase separatorsa review. The Canadian Journal of Chemical
Engineering 90, 1547–1561.
Lamb, H., 1932. Hydrodynamics. Dover, New York.
Landrini, M., Colagrossi, A., Greco, M., Tulin, M., 2012. The fluid mechanics
of splashing bow waves on ships: A hybrid bemsph analysis. Ocean
Engineering 53, 111 – 127.
Leduc, J., Leboeuf, F., Lance, M., Parkinson, E., Marongiu, J.C., 2010. A
SPH-ALE method to model multiphase flow with surface tension, in: 7th
International Conference on Multiphase Flow, Tampa, United States of
America.
Macia, F., Antuono, M., Gonzalez, L.M., Colagrossi, A., 2011. Theoretical
analysis of the no-slip boundary condition enforcement in SPH methods.
Progress of Theoretical Physics 125, 1091–1121.
Marrone, S., Colagrossi, A., Antuono, M., Colicchio, G., Graziani, G.,
2013. An accurate sph modeling of viscous flows around bodies at low
and moderate reynolds numbers. accepted for publication on Journal of
Computational Physics .
Monaghan, J., 2012. Smoothed particle hydrodynamics and its diverse
applications. Annual Review of Fluid Mechanics 44, 323–346.
Monaghan, J.J., 1992. Smoothed particle hydrodynamics. Annual review of
Astronomy and Astrophysics 30, 543–574.
40
Monaghan, J.J., 2000. Sph without a tensile instability. Journal of
Computational Physics 159, 290–311.
Monaghan, J.J., Gingold, R.A., 1983. Shock simulation by the particle
method sph. Journal of Computational Physics 52, 374–389.
Morris, J.P., 2000. Simulating surface tension with smoothed particle
hydrodynamics. International Journal of Numerical Methods in Fluids
33, 333–353.
Morris, J.P., Fox, P.J., Zhu, Y., 1997. Modeling low reynolds number
incompressible flows using sph. Journal of Computational Physics 136,
214 – 226.
Popinet, S., 2009. An accurate adaptive solver for surface-tension-driven
interfacial flows. Journal of Computational Physics 228, 5838 – 5866.
Popinet, S., Zaleski, S., 1999. A front-tracking algorithm for accurate
representation of surface tension. International Journal for Numerical
Methods in Fluids 30, 775–793.
Price, D.J., 2008. Modelling discontinuities and kelvinhelmholtz instabilities
in sph. Journal of Computational Physics 227, 10040 – 10057.
Prosperetti, A., 1980. Normal-mode analysis ofr the oscillations of a viscous
liquid drop in a immiscible liquid. Journal de Mcanique 19, 149–182.
Renardy, Y., Renardy, M., 2002. PROST: A parabolic reconstruction of
surface tension for the volume-of-fluid method. Journal of Computational
Physics 183, 400–421.
Slot, J., Van Campen, L., Hoeijmakers, H., Mudde, R., 2011. In-line oil-water
separation in swirling flow, in: 8th International Conference on CFD in
Oil & Gas, Metallurgical and Process Industries, Trondheim, Norway.
41

Swegle, J.W., Hicks, D.L., Attaway, S.W., 1995. Smoothed particle
hydrodynamics stability analysis. Journal of Computational Physics 116,
123–134.
Szewc, K., Pozorski, J., Minier, J.P., 2013. Simulations of single bubbles
rising through viscous liquids using smoothed particle hydrodynamics.
International Journal of Multiphase Flow 50, 98 – 105.
Tartakovsky, A.M., Meakin, P., 2005. A smoothed particle hydrodynamics
model for miscible flow in three-dimensional fractures and the two-
dimensional rayleightaylor instability. Journal of Computational Physics
207, 610 – 624.
Torres, D.J., Brackbill, J.U., 2000. The Point-Set Method: Front-Tracking
without connectivity. Journal of Computational Physics 165, 620 – 644.
Tryggvason, G., Lu, J., Biswas, S., Esmaeeli, A., 2009. Studies of
bubbly channel flows by direct numerical simulations, in: Deville, M.,
L, T.H., Sagaut, P. (Eds.), Turbulence and Interactions. Springer Berlin
/ Heidelberg. volume 105 of Notes on Numerical Fluid Mechanics and
Multidisciplinary Design, pp. 93–111.
Vincent, S., Larocque, J., Lacanette, D., Toutant, A., Lubin, P., Sagaut, P.,
2008. Numerical simulation of phase separation and a priori two-phase les
filtering. Computers & Fluids 37, 898 – 906.
Violeau, D., Buvat, C., Abed-Meraim, K., de Nanteuil, E., 2007. Numerical
modelling of boom and oil spill with sph. Coastal Engineering 54, 895 –
913.
Zhang, D.Z., Prosperetti, A., 1994. Averaged equations for inviscid disperse
two-phase flow. Journal of Fluid Mechanics 267, 185–219.
42
Related Documents











