
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
i
The 3rd International Conference of Applied Science and Technology (ICAST) 2020
October 24-25th 2020 Padang, Indonesia
COPYRIGHT AND REPRINT PERMISSION:
Copyright and Reprint Permission: Abstracting is permitted with credit to the source. Libraries are permitted to photocopy beyond the limit of U.S. copyright law for private use of patrons those articles in this volume that carry a code at the bottom of the first page, provided the per-copy fee indicated in the code is paid through Copyright Clearance Center, 222 Rosewood Drive, Danvers, MA 01923. For reprint or republication permission, email to IEEE Copyrights Manager at pubs- [email protected]. All rights reserved. Copyright ©2020 by IEEE.
IEEE Catalog Number CFP20D37-PRT
ISBN 978-1-7281-9565-0
Editor Dedi Kuniadi, S.ST., M.Sc, Hendrick, ST., MT.,
Ph.D, Randy Heriyanto, SST., M.Sc, Dr. Yuli
Yetri, M.Si, Gusri Yaldi, SST., M.Eng., Ph.D, Dr.
Anda Dwiharyadi, SE.,M.Si.Ak, Dr. Eka
Siskawati, SE.,M.Sc.Ak
Publisher IEEE
Secretariat Kampus Politeknik Negeri Padang, Limau
Manis, Kecamatan Pauh, Kota Padang, 25164.
Provinsi Sumatera Barat, Indonesia.
e-mail: [email protected]
ii
Program Book The 3rd International Conference of Applied Science
and Technology (ICAST) 2020
Politeknik Negeri Padang - PNP
Padang, Indonesia, October 24-25th, 2020
iii
Table of Contents
The 3rd International Conference on Applied Science and Technology Committee ......................................................................... iv Welcome Message from General Chair of ICAST 2020 ....................... 1 Foreword of ICAST 2020 .......................................................... 2 Guidelines ICAST 2020 ............................................................ 3 Virtual Conference Rooms for ICAST 2020 ..................................... 4 Technical Program ................................................................ 6 Keynote Speaker ................................................................... 7 Room Parallel Sessions .......................................................... 11
iv
The 3rd International Conference of Applied Science and Technology Committee
Host Organizer Politeknik Negeri Padang (PNP)
Technical Co-Sponsor IEEE INDONESIA SECTION
General Chairs Dr. Yuhefizar, S.Kom., M.Kom (Politeknik Negeri Padang, Indonesia) General Co-Chairs Dedi Kuniadi, S.ST., M.Sc (Politeknik Negeri Padang, Indonesia) Steering Committee Surfa Yondri, ST., SST., M.Kom (Politeknik Negeri Padang) Revalin Herdianto, ST., M.Sc., Ph.D (Politeknik Negeri Padang) Anton, ST., MT (Politeknik Negeri Padang) Dr. Yuhefizar, S.Kom., M.Kom (Politeknik Negeri Padang) Zulis Erwanto, S.T., M.T (Politeknik Negeri Banyuwangi) Dr. Tineke Saroinsong, SST., M.Eng (Politeknik Negeri Manado) Dr. Ir. Noor Cholis Basjaruddin, MT (Politeknik Negeri Bandung) Mohammad Basuki Rahmat, ST., MT (Politeknik Perkapalan Negeri Surabaya) Dr. Benny Benyamin Nasution, Dipl.Ing., M.Eng (Politeknik Negeri Medan) Adrianus Amheka, Ph.D (Politeknik Negeri Kupang) Dr. Dwi Hariyanti, SE, MM, Akt, CA (Politeknik Negeri Ambon) Saiful Ghozi, S.Pd., M.Pd (Politeknik Negeri Balik Papan) Ahyar M. Diah, Ph.D (Politeknik Negeri Samarinda) Dr. Ida Nurhayati, S.H., M.H (Politekni Negeri Jakarta) Ir. Jaksen M. Amin, M.Si (Politeknik Negeri Sriwijaya) Dr. Ir. Saifuddin, MT (Politeknik Negeri Lhokseumawe) Dr. Parulian Silalahi, M.Pd (Politeknik Manufaktur Negeri Bangka Belitung) Dr. Ir. Firman, M.T (Politeknik Negeri Ujung Pandang) Erfan Rohadi, ST., M.Eng., Ph.D (Politeknik Negeri Malang) Dr. Ir. Anang Tjahjono, MT (Politeknik Elektronika Negeri Surabaya) Daniel Sutopo Pamungkas, Ph.D (Politeknik Negeri Batam) Akmal Indra, MT (Politeknik Negeri Bengkalis) Ardian P. Atmaja, S.Kom, M.Cs (Politeknik Negeri Madiun) Dr. Usman Madubun, S.Pi., M.Si (Politeknik Perikanan Negeri Tual) Rudito, S.TP, MP (Politeknik Pertanian Negeri Samarinda) Wardika, S.ST., M.Eng (Politeknik Negeri Indra Mayu) Agung Adi Candra S.KH., M.Si (Politeknik Negeri Lampung) Ganjar Ndaru Ikhtiagung, S.E., M.M (Politeknik Negeri Cilacap) Dr. Ir. Dahlia, MP (Politeknik Pertanian Negeri Pangkep) Dr. Ir. Budi Hariono, M.Si (Politeknik Negeri Jember) Dr. Noval Lilansa, MT (Politeknik Manufaktur Bandung)
v
drh. Ferdi Fathurohman, SKH., MM., M.Si (Politeknik Negeri Subang) Maya Santi, S.Pd., MT (Politeknik Negeri Ketapang) Marlia Adriana, ST., MT (Politeknik Negeri Tanah Laut) Laily Ulfiyah, M.T (Politeknik Negeri Madura) Krisna Setiawan, S.P, M.Sc (Politeknik Pertanian Negeri Kupang) I Putu Mertha Astawa, SE., MM (Politeknik Negeri Bali) Rudy Cahyadi, S.Si., MT (Politeknik Negeri Media Kreatif) Afizar, SP., MP., Ph.D (Politeknik Pertanian Negeri Payakumbuh) Lang jagat, S.Si., M.T (Politeknik Negeri Sambas) Deisya M. Alhamid, SE., MM (Politeknik Negeri Fakfak) Prof. Dr. Ardi Marwan, M.Ed (Politeknik Negeri Pontianak) Nurmahaludin, ST, MT (Politeknik Negeri Banjarmasin)
Technical Program Committee Professor Budy P. Resosudarmo (Arndt-Corden Department of Economics, ANU, Australia) Soushi Suzuki (Hokkai-Gakuen University, Japan) A/Prof. Helmut Yabar (University of Tsukuba, Japan) A/Prof. Takeshi Mizunoya (University of Tsukuba, Japan) Professor Hervé Boileau (Université Savoie Mont Blanc, France) A/Prof. Qian Zhou (North China Electric Power University, China) A/Prof. Buyung Kosasih (University of Wollongong, Australia) A/ Prof. Elena Cigu (Alexandru Ioan Cuza University of Iasi, Romania) A/Prof. Jonatan Lassa (Charles Darwin University, Australia) Hidayatul Ihsan, S.E.Ak., M.Sc., Acc, Ph.D,C.A (Politeknik Negeri Padang) Hendrick, ST., MT., Ph.D (Politeknik Negeri Padang) Dr. Yuli Yetri, M.Si (Politeknik Negeri Padang) Gusri Yaldi, SST., M.Eng., Ph.D (Politeknik Negeri Padang) Dr. Anda Dwiharyadi, SE.,M.Si.Ak (Politeknik Negeri Padang) Dr. Eka Siskawati, SE.,M.Sc.Ak (Politeknik Negeri Padang)
Local Committee Yudhytia Wimeina, SE., MM (Politeknik Negeri Padang) Sariani, SS., MA Appl Ling (Politeknik Negeri Padang) Rafidola Mareta Riesa, S.ST.Par.,M.Sc (Politeknik Negeri Padang) Randy Heriyanto, SST., M.Sc (Politeknik Negeri Padang) Afifah, SE., M.Si (Politeknik Negeri Padang) Firdaus, ST., MT (Politeknik Negeri Padang) Yulindon, ST., M.Kom (Politeknik Negeri Padang) Ismail, SST.,MT (Politeknik Negeri Padang) Teuku Moch. Alamsyah Almera (Politeknik Negeri Padang)
Web Developer Aliv Faizal M., S.Pd., M.Pd. (Politeknik Elektronika Negeri Surabaya, INDONESIA) Willy Achmat Fauzi, S. ST. (Politeknik Elektronika Negeri Surabaya, INDONESIA) Anritsu S.Ch. Polii (Politeknik Negeri Manado, INDONESIA)
1
Welcome Message from General Chair of iCAST 2020
Welcome to the iCAST 2020, the third international conference held by Indonesian Polytechnics Consortium. For this year, the iCAST 2020 conference is held in Padang, and hosted by Politeknik Negeri Padang, Indonesia, as a continuation of the previous iCAST conference in Bali. The theme for this conference is “The Emergence of Green and Model-Based Technology in Developing Economy, Social Life, and Culture for Glocalization”. This theme is taken by considering that improving worldwide technology can be adopted and implemented in local society in Indonesia. Polytechnic, as a higher-educational institution that provides hands-on experience within a dynamic and progressive learning environment producing skilled and professional graduates in their knowledge background. Therefore, supporting green development that focused on responsiveness to the environment, efficiency in uses of earth’s limited resources, and sensitivity to the community and culture has become the concern of this vocational institution. To answer this challenge, this conference will be divided into two groups of science, i.e., social science and engineering science to present the results of applied research, and to find the balance between economic and environmental sustainability. As the general chair of this conference committee, I have the honor to welcome all the plenary speakers, presenters, and participants to the iCAST 2020 conference. I sincerely hope that you will enjoy the conference, and thank you for your participation. Warm regards, Dr. Yuhefizar General Chair
2
Foreword of ICAST 2020
Welcome, Ladies and Gentlemen, Dear Colleagues, I am pleased as the chairman of the Director Forum of State Polytechnic of Indonesia to welcome you to the Third International Conference on Applied Science and Technology (ICAST) 2020. The theme of this conference is “The Emergence of Green and Model-Based Technology in Developing Economy, Social Life, and Culture for Glocalization”, which will be a good topic for researchers, scientists and the entire engineering community to meet each other and sharing their thoughts, knowledge and ideas. This Conference is also provide a valuable opportunity for industry specialists and decision-makers to share experiences. This symposium would have not been possible without the contributions and hard works of the keynote and invited speaker, all the authors and reviewers, the advisory committee as well as chair persons, Technical Committee and Organizing Committee. Allow me to take this opportunity to express my sincere appreciation to all of you. Also great appreciation to Politeknik Negeri Padang (PNP) for hosting this conference. However, due to Covid-19 and following the advice of local authorities, the conference will be held through online or virtual conference (VICON). And I would like to encourage the delegates to participate with an increasing number in all the activities and intersting discussion through online platform during the conference. I am sure you will have fruitful and rewarding exchanges through this conference. I wish you every success with this important conference and I look forward to learning about the outcome. Thank you. Dr.Eng. Zainal Arief Chairman of The Director Forum of State Polytechnic of Indonesia
3
Guidelines ICAST
1. Official Language The official language of iCAST 2020 is English. All presentations including Q&A will be delivered in English.
2. Guideline for Participants • Conference Venue
The event of ICAST 2020 will be held online by using Cisco Webex as the virtual conference media.
• Registration Time of Registration: 07.30 – 08.00 (Local Time Jakarta, GMT + 7), Saturday, October 24th 2020
3. Guideline for Presenters and Session Chair/Moderator • 3rd International Conference of Applied Science and Technology (iCAST)
2020 will be held using hybrid mode, namely virtual conference (main) and a pre-recorded video (spare) on the day of implementation. The pre-recorded video will be played when the author fails to join the virtual conference due to lack of the internet connection. It must be submitted to the committee a month before the conference date.
• Presenters needs to attend both dry run and parallel session. Dry run and parallel session in virtual conference will be held using Cisco Webex. Both dry run and Parallel Session, The iCAST Committee will speak in English throughout the sessions which will also be recorded.
• During parallel session, the presenters and session chairs are asked to keep to the paper sequence as shown in the Final Program. By following the predefined schedule, participants can switch between sessions without missing the particular papers of interest.
• The presentation time for each presenter is 15 minutes including Q&A. The session chairs should allow the presenter for a 10 minutes presentation and leave 5 minutes for discussions. All presenters are requested to report their attendance to the session chair 10 minutes before the session begins.
4
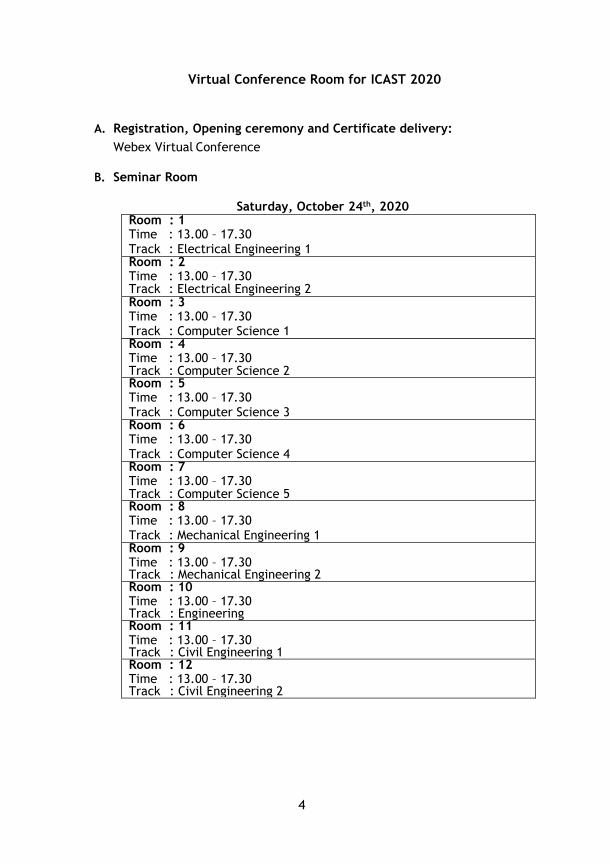
Virtual Conference Room for ICAST 2020
A. Registration, Opening ceremony and Certificate delivery:
Webex Virtual Conference
B. Seminar Room
Saturday, October 24th, 2020
Room : 1 Time : 13.00 – 17.30 Track : Electrical Engineering 1 Room : 2 Time : 13.00 – 17.30 Track : Electrical Engineering 2 Room : 3 Time : 13.00 – 17.30 Track : Computer Science 1 Room : 4 Time : 13.00 – 17.30 Track : Computer Science 2 Room : 5 Time : 13.00 – 17.30 Track : Computer Science 3 Room : 6 Time : 13.00 – 17.30 Track : Computer Science 4 Room : 7 Time : 13.00 – 17.30 Track : Computer Science 5 Room : 8 Time : 13.00 – 17.30 Track : Mechanical Engineering 1 Room : 9 Time : 13.00 – 17.30 Track : Mechanical Engineering 2 Room : 10 Time : 13.00 – 17.30 Track : Engineering Room : 11 Time : 13.00 – 17.30 Track : Civil Engineering 1 Room : 12 Time : 13.00 – 17.30 Track : Civil Engineering 2
16
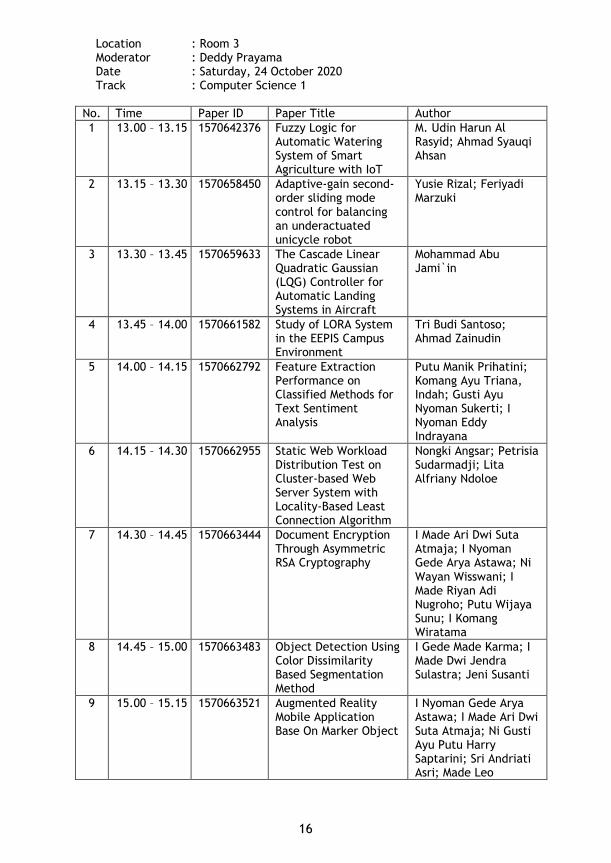
Location : Room 3 Moderator : Deddy Prayama Date : Saturday, 24 October 2020 Track : Computer Science 1
No. Time Paper ID Paper Title Author
1 13.00 – 13.15 1570642376 Fuzzy Logic for Automatic Watering System of Smart Agriculture with IoT
M. Udin Harun Al Rasyid; Ahmad Syauqi Ahsan
2 13.15 – 13.30 1570658450 Adaptive-gain second-order sliding mode control for balancing an underactuated unicycle robot
Yusie Rizal; Feriyadi Marzuki
3 13.30 – 13.45 1570659633 The Cascade Linear Quadratic Gaussian (LQG) Controller for Automatic Landing Systems in Aircraft
Mohammad Abu Jami`in
4 13.45 – 14.00 1570661582 Study of LORA System in the EEPIS Campus Environment
Tri Budi Santoso; Ahmad Zainudin
5 14.00 – 14.15 1570662792 Feature Extraction Performance on Classified Methods for Text Sentiment Analysis
Putu Manik Prihatini; Komang Ayu Triana, Indah; Gusti Ayu Nyoman Sukerti; I Nyoman Eddy Indrayana
6 14.15 – 14.30 1570662955 Static Web Workload Distribution Test on Cluster-based Web Server System with Locality-Based Least Connection Algorithm
Nongki Angsar; Petrisia Sudarmadji; Lita Alfriany Ndoloe
7 14.30 – 14.45 1570663444 Document Encryption Through Asymmetric RSA Cryptography
I Made Ari Dwi Suta Atmaja; I Nyoman Gede Arya Astawa; Ni Wayan Wisswani; I Made Riyan Adi Nugroho; Putu Wijaya Sunu; I Komang Wiratama
8 14.45 – 15.00 1570663483 Object Detection Using Color Dissimilarity Based Segmentation Method
I Gede Made Karma; I Made Dwi Jendra Sulastra; Jeni Susanti
9 15.00 – 15.15 1570663521 Augmented Reality Mobile Application Base On Marker Object
I Nyoman Gede Arya Astawa; I Made Ari Dwi Suta Atmaja; Ni Gusti Ayu Putu Harry Saptarini; Sri Andriati Asri; Made Leo

978-1-7281-9567-4/20/$31.00 ©2020 IEEE
International Conference on Applied Science and Technology (iCAST) 2020
12
The Cascade Linear Quadratic Gaussian (LQG) Controller for Automatic Landing Systems in
Aircraft Mohammad Abu Jami’ín Teknik Kelistrikan Kapal
Politeknik Perkapalan Negeri Surabaya Surabaya, Indonesia [email protected]
Abstract— In this note, we present the controller design by cascade LQG controller for automatic landing system. The problem in automatic landing system (ALS) is uncertain weather conditions which during take-off or landing can get stuck in turbulence and microburst conditions. We apply the LQG controller to overcome the noise caused by turbulence and microburst conditions. LQG controller is able to set the flight states according to the desired reference in noise conditions. The noise rejections are performed by Kalman filtering to estimate the state of the system dynamic. If the plant of automatic landing system is unstable system, the inner loop controller is performed by using pole placement technique solved by Ricati equation. The estimated state via the output of Kalman filtering becomes the state feedback of LQG controller. Based on the result of simulation LQG controller can be implemented in automatic landing system in which the noise composed to the system.
Keywords— automatic landing; Kalman filtering; LQG controller; pole placement; noise rejection.
I. INTRODUCTION
The automatic landing system for aircraft is the significant tool to guide landing for aircraft automatically. It is well known that taking off and landing is the most dangerous stages in flight, so it takes place to minimize the risk caused by human error at landing phase [1][2]. Automatic landing system is coupled with the Instrument Landing System (ILS) or Global Positioning System (GPS) to monitor state trajectory of flight tracking [3] [4]. The initial states requirement is need to perform automatic landing accurately to follow tracking reference trajectory and landing safely [5].
Automatic landing system give fairly satisfactory in performance when operate in normal conditions. However, in turbulence or microburst condition is a critical point in flight. Turbulence and microburst conditions are two disturbances that often occur in aircraft when the aircraft is going to landing or take-off. Wind shear can change direction horizontally or vertically [6]. Wind shift towards the vertical is called microburst or downburst which is very dangerous impact on the flight. Therefore, this problem is a very serious concern for both the pilot and the aviation industry [7].
Some researchers proposed the design of automatic landing system for aircraft using conventional PID controller [8] and neural-network based controller [9]. The design of automatic landing controller is derived under the radial basis function network that the controller called as minimal resource allocating Network (MRAN). The techniques are incorporated growing and pruning strategy by utilizing H∞
controller by feedback error learning mechanism [7]. The MRAN has been used for system identification, prediction, and deriving the control law for aircraft flight controller [10]. The robust controller was designed using H∞ technique under conventional controller with the inner-loop is replaced by PID controller [11] and model predictive control [12]. The adaptive control for the aircraft to control lateral movement was proposed using high order tuner of H∞ controller. However, the closed loop controller may become unstable with small level saturation. The control system is sensitive to parametric uncertainty of the external disturbances [13].
In this paper, we propose cascade LQG controller to track the reference trajectory of flight for landing automatically. LQG controller has two steps algorithm, 1) reject the noise by wind disturbances and 2) controller design using Linear Quadratic Regulator (LQR). The noise rejection is performed by Kalman filtering through estimate the state of system. The estimated state of the system is set as feedback controller. By solving Ricati equation, the gains of state feedback are obtained that is set as the gain of feedback controller. The inner loop system of cascade LQG controller is designed by pole placement technique to make the system become stable. By using pole placement technique, the characteristic of unstable system is manipulated by pole placement to keep the system becomes stable. Based on the stable system, we derive the controller by LQR algorithm via solving Ricati equation.
The estimated system is unstable shown by the state parameters of Kalman filtering. The poles of unstable system lie on the right half plan of imaginary axes. Thus, the inner loop is designed to make the system becomes stable by regulating the feedback gain using pole placement technique. As we know, Kalman filtering technique is the important tool for rejected the noise of the system and state estimation [14]. Based on Kalman filtering, we design the tracking filter and then the tracking of maneuvering targets for discrete-time control systems can be estimated [15]. Kalman filtering technique is performed to make the system become robust. Noise causes the system to become unstable. This is caused by the presence of state delay and missing measurement on the system [16]. Kalman filtering is used for nonlinear time varying system to become estimator and tracker sampled data applied for fault tolerance controller [17].
The cascade LQG controller is able to follow the target trajectory references by initial setting conditions of the system are determined. The performances of controller are
2020
Inte
rnat
iona
l Con
fere
nce
on A
pplie
d Sc
ienc
e an
d Te
chno
logy
(iC
AST
) | 9
78-1
-728
1-95
67-4
/20/
$31.
00 ©
2020
IEEE
| D
OI:
10.1
109/
iCA
ST51
016.
2020
.955
7592
Authorized licensed use limited to: Helsingin Yliopisto. Downloaded on October 14,2021 at 05:08:18 UTC from IEEE Xplore. Restrictions apply.

13
measured by error trajectory and root mean square error (RMS). The noise of the system by wind disturbances are assumed that the noise signal is zero mean and the varying noise are assumed and calculated by source to noise ratio (SNR).
II. PROBLEM DESCRIPTION AND FORMULATION
A. Dynamic Modeling for Aircraft Landing System
The dynamic modeling of aircraft landing can be simplified as short period equations of motions stated as transfer function by [18],
),(
12
)1()(
2
2s
ss
sTKs
ss
ss δ
ωη
ω
θ
++
+=′
( ) ),(1
)( ssT
VCsh
s
F θ ′+
=′′
),(1
)(2
shs
sh ′′=
)(
12
)(
2
22
sss
s
VKCsh
ss
sF δ
ωη
ω
++
= (1)
Where the parameters of the aircraft are defined as the short period gain (Ks), the short period resonant frequency (ωs), the short period damping factor (η), the path time constant (Ts), conversion factor (CF) and V is the velocity of the aircraft. The controlled variable of aircraft presented in (1) are the pitch angle rate (θ’), the altitude (h) and the altitude acceleration (h’’) and the input of controller by using elevator deflection (δ).
The dynamical model stated in (1) can be presented into state space model as,
)(0
0
0
0
1000
00
0010
24
3
2
1
3214
3
2
1
t
Kx
x
x
x
mmm
T
VC
T
C
x
x
x
x
ss
s
F
s
F
δ
ω
+
−
=
=
4
3
2
1
1000
0100
0010
0001
)(
)(
)(
)(
x
x
x
x
t
t
th
th
θθ
(2)
Where,
VCVTCVTCm
F
s
sF
s
sF
2
21
21 ωηω +−= ,
22
2
12
ss
s
s
TTm −−= ωηω ,
ssT
m ηω21
3 −= .
Some requirements should be fulfilled in order to achieve safe and comfortable landing. Thus, the desired trajectory of altitude is stated as,
2015
150,
,3.06
)5
exp(30≤≤≤≤
−
−=t
t
t
thr
(3)
Where the variable denoted as hr and t are the desired trajectory of altitude and time. During landing time before touch-down, the pitch angle of the aircraft must be set that is lie in the range [00, 100]. The desired pitch angle at touchdown is equal to 20. The position of elevator is also set that is stated as in (4). Actually, the desired elevator deflection angle is equal to zero to minimize energy drive and control effort.
fttt ≤≤≤≤− 0,15)(35 00 δ (4)
B. Cascade LQG Controller
The purposes of LQG controller are the same as LQR controller. Those are to get gain state feedback, so the response of the system controller is able to minimize the index performance. LQG controller use LQR algorithm as the step algorithm to get gain state feedback controller by solving Ricati equation. The other step of LQG controller design is to rejection the noise of the system by Kalman filtering. The output of the Kalman filtering is the estimated state of the system, it will become feedback with the gain feedback design are achieved by LQR algorithm. LQG controller is not able running well in unstable system, so the inner loop cascade with pole placement technique stabilize the system.
Tracking trajectory by LQG controller is to manage the response of controller in order to achieve the performance index that is to minimize the error and energy drive. The performance index of response controller is stated as,
dtRUUXQXT
J TT T
T)(
1lim
0+= →∞
(5)
The minimum of J can be obtained by control signal u by,
XKu .= (6)
The K is the gain of state feedback expressed in (7) and X is the state of the system, in this LQG design state feedback is the estimated state from the output of Kalman filtering.
ABBRkPBRkK TT 1111 ])1([)( −−−− ++= (7)
The P is the positive definite matrix achieved by solving Ricati equation stated as,
Authorized licensed use limited to: Helsingin Yliopisto. Downloaded on October 14,2021 at 05:08:18 UTC from IEEE Xplore. Restrictions apply.
14
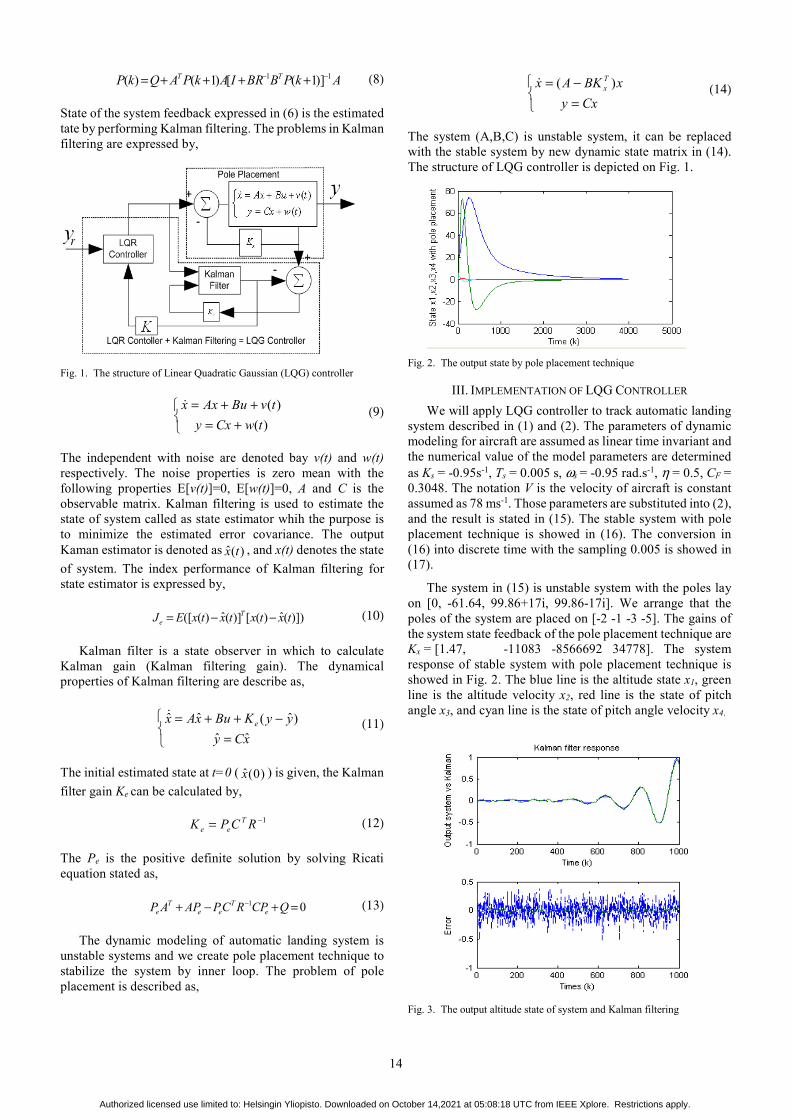
AkPBBRIAkPAQkP TT 11 )]1([)1()( −− ++++= (8)
State of the system feedback expressed in (6) is the estimated tate by performing Kalman filtering. The problems in Kalman filtering are expressed by,
Fig. 1. The structure of Linear Quadratic Gaussian (LQG) controller
+=++=
)(
)(
twCxy
tvBuAxx (9)
The independent with noise are denoted bay v(t) and w(t) respectively. The noise properties is zero mean with the following properties E[v(t)]=0, E[w(t)]=0, A and C is the observable matrix. Kalman filtering is used to estimate the state of system called as state estimator whih the purpose is to minimize the estimated error covariance. The output Kaman estimator is denoted as )(ˆ tx , and x(t) denotes the state
of system. The index performance of Kalman filtering for state estimator is expressed by,
)])(ˆ)([)](ˆ)(([ txtxtxtxEJ Te −−= (10)
Kalman filter is a state observer in which to calculate Kalman gain (Kalman filtering gain). The dynamical properties of Kalman filtering are describe as,
=−++=
xCy
yyKBuxAx e
ˆˆ
)ˆ(ˆ̂ (11)
The initial estimated state at t=0 ( )0(x̂ ) is given, the Kalman
filter gain Ke can be calculated by,
1−= RCPK Tee
(12)
The Pe is the positive definite solution by solving Ricati equation stated as,
01 =+−+ − QCPRCPAPAP eT
eeT
e (13)
The dynamic modeling of automatic landing system is unstable systems and we create pole placement technique to stabilize the system by inner loop. The problem of pole placement is described as,
=−=
Cxy
xBKAx Tx )( (14)
The system (A,B,C) is unstable system, it can be replaced with the stable system by new dynamic state matrix in (14). The structure of LQG controller is depicted on Fig. 1.
Fig. 2. The output state by pole placement technique
III. IMPLEMENTATION OF LQG CONTROLLER
We will apply LQG controller to track automatic landing system described in (1) and (2). The parameters of dynamic modeling for aircraft are assumed as linear time invariant and the numerical value of the model parameters are determined as Ks = -0.95s-1, Ts = 0.005 s, ωs = -0.95 rad.s-1, η = 0.5, CF = 0.3048. The notation V is the velocity of aircraft is constant assumed as 78 ms-1. Those parameters are substituted into (2), and the result is stated in (15). The stable system with pole placement technique is showed in (16). The conversion in (16) into discrete time with the sampling 0.005 is showed in (17).
The system in (15) is unstable system with the poles lay on [0, -61.64, 99.86+17i, 99.86-17i]. We arrange that the poles of the system are placed on [-2 -1 -3 -5]. The gains of the system state feedback of the pole placement technique are Kx = [1.47, -11083 -8566692 34778]. The system response of stable system with pole placement technique is showed in Fig. 2. The blue line is the altitude state x1, green line is the altitude velocity x2, red line is the state of pitch angle x3, and cyan line is the state of pitch angle velocity x4.
Fig. 3. The output altitude state of system and Kalman filtering
Authorized licensed use limited to: Helsingin Yliopisto. Downloaded on October 14,2021 at 05:08:18 UTC from IEEE Xplore. Restrictions apply.
15
The noise of the system at input w(t) and output v(t) is assumed as zero means with the amplitude of the noise perturbations 2 percent, this noise is the same as 33.794 measured in SNR (source to noise ratio). The Kalman gains Ke by solution on (12) and (13) are [0.0264 0.071 0.00065 -0.017]. The state x1 and 1x̂ through Kalman filtering is
showed on Fig. 3. In this case to show the performance of Kalman filtering, we perform the system and Kalman filtering system with the pseudo random binary sequence (PRBS) input. The output system vs Kalman filtering are presented by blue line is the system output and green line is the Kalman output. The error of system to measurement signal is showed by blue line and the error of system to Kalman filtering output is showed by green line.
)(
00429.0
0
0
0
1.19939810954.70
1000
0475596.600
0010
4
3
2
1
4
3
2
1
t
x
x
x
x
x
x
x
x
δ
+
−−
−=
;
=
4
3
2
1
1000
0100
0010
0001
)(
)(
)(
)(
x
x
x
x
t
t
th
th
θθ
(15)
)(
00429.0
0
0
0
96.493086558.390063.0
1000
0475596.600
0010
4
3
2
1
4
3
2
1
t
x
x
x
x
x
x
x
x
δ
+
−−
−=
;
=
4
3
2
1
1000
0100
0010
0001
)(
)(
)(
)(
x
x
x
x
t
t
th
th
θθ
(16)
Fig. 4. The input reference of the system
Fig. 5. The input reference vs the output of pole placement controller
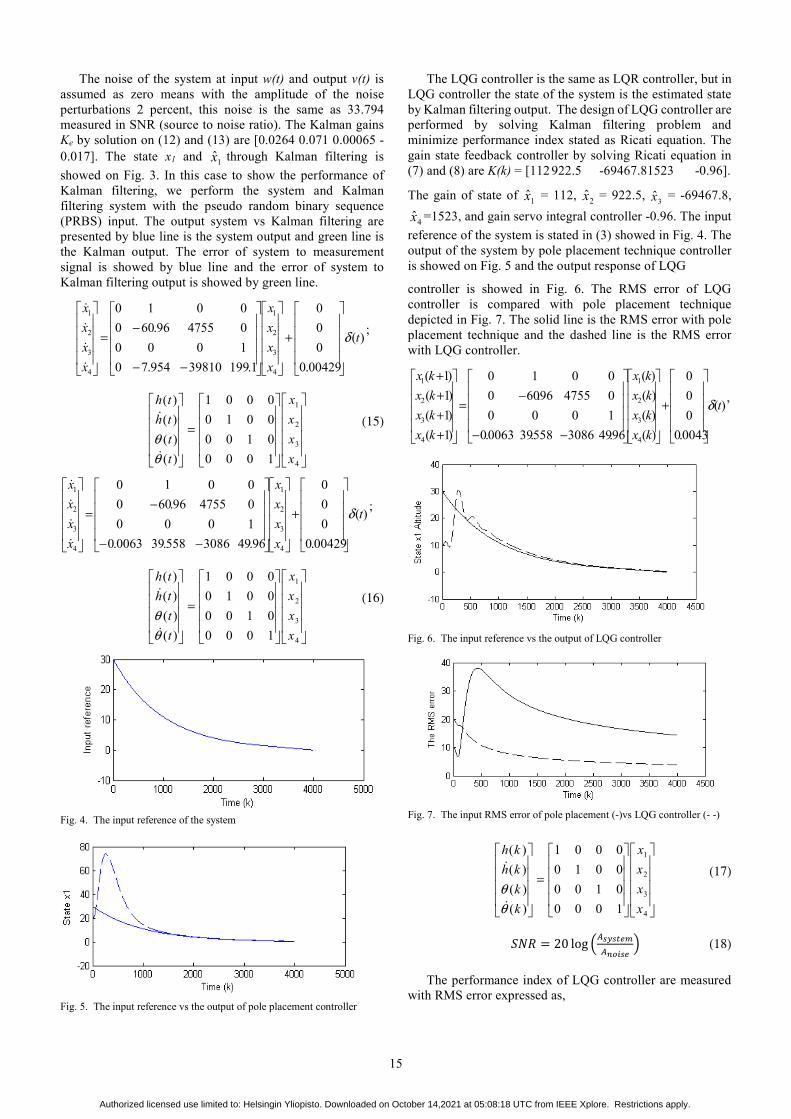
The LQG controller is the same as LQR controller, but in LQG controller the state of the system is the estimated state by Kalman filtering output. The design of LQG controller are performed by solving Kalman filtering problem and minimize performance index stated as Ricati equation. The gain state feedback controller by solving Ricati equation in (7) and (8) are K(k) = [112 922.5 -69467.8 1523 -0.96].
The gain of state of 1x̂ = 112, 2x̂ = 922.5, 3x̂ = -69467.8,
4x̂ =1523, and gain servo integral controller -0.96. The input
reference of the system is stated in (3) showed in Fig. 4. The output of the system by pole placement technique controller is showed on Fig. 5 and the output response of LQG
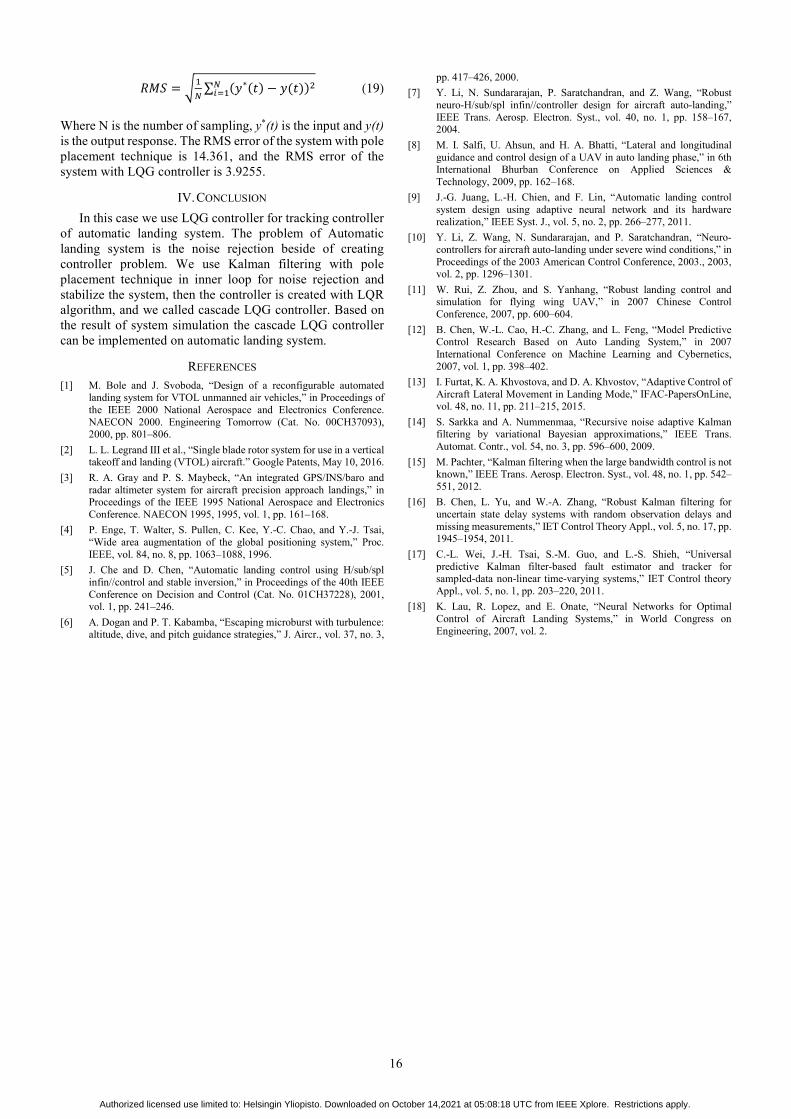
controller is showed in Fig. 6. The RMS error of LQG controller is compared with pole placement technique depicted in Fig. 7. The solid line is the RMS error with pole placement technique and the dashed line is the RMS error with LQG controller.
)(
0043.0
0
0
0
)(
)(
)(
)(
96.493086558.390063.0
1000
0475596.600
0010
)1(
)1(
)1(
)1(
4
3
2
1
4
3
2
1
t
kx
kx
kx
kx
kx
kx
kx
kx
δ
+
−−
−=
++++
,
Fig. 6. The input reference vs the output of LQG controller
Fig. 7. The input RMS error of pole placement (-)vs LQG controller (- -)
=
4
3
2
1
1000
0100
0010
0001
)(
)(
)(
)(
x
x
x
x
k
k
kh
kh
θθ
(17)
= 20 log (18)
The performance index of LQG controller are measured with RMS error expressed as,
Authorized licensed use limited to: Helsingin Yliopisto. Downloaded on October 14,2021 at 05:08:18 UTC from IEEE Xplore. Restrictions apply.
16
= ∑ ( *( ) − ( )) (19)
Where N is the number of sampling, y*(t) is the input and y(t) is the output response. The RMS error of the system with pole placement technique is 14.361, and the RMS error of the system with LQG controller is 3.9255.
IV. CONCLUSION
In this case we use LQG controller for tracking controller of automatic landing system. The problem of Automatic landing system is the noise rejection beside of creating controller problem. We use Kalman filtering with pole placement technique in inner loop for noise rejection and stabilize the system, then the controller is created with LQR algorithm, and we called cascade LQG controller. Based on the result of system simulation the cascade LQG controller can be implemented on automatic landing system.
REFERENCES
[1] M. Bole and J. Svoboda, “Design of a reconfigurable automated landing system for VTOL unmanned air vehicles,” in Proceedings of the IEEE 2000 National Aerospace and Electronics Conference. NAECON 2000. Engineering Tomorrow (Cat. No. 00CH37093), 2000, pp. 801–806.
[2] L. L. Legrand III et al., “Single blade rotor system for use in a vertical takeoff and landing (VTOL) aircraft.” Google Patents, May 10, 2016.
[3] R. A. Gray and P. S. Maybeck, “An integrated GPS/INS/baro and radar altimeter system for aircraft precision approach landings,” in Proceedings of the IEEE 1995 National Aerospace and Electronics Conference. NAECON 1995, 1995, vol. 1, pp. 161–168.
[4] P. Enge, T. Walter, S. Pullen, C. Kee, Y.-C. Chao, and Y.-J. Tsai, “Wide area augmentation of the global positioning system,” Proc. IEEE, vol. 84, no. 8, pp. 1063–1088, 1996.
[5] J. Che and D. Chen, “Automatic landing control using H/sub/spl infin//control and stable inversion,” in Proceedings of the 40th IEEE Conference on Decision and Control (Cat. No. 01CH37228), 2001, vol. 1, pp. 241–246.
[6] A. Dogan and P. T. Kabamba, “Escaping microburst with turbulence: altitude, dive, and pitch guidance strategies,” J. Aircr., vol. 37, no. 3,
pp. 417–426, 2000.
[7] Y. Li, N. Sundararajan, P. Saratchandran, and Z. Wang, “Robust neuro-H/sub/spl infin//controller design for aircraft auto-landing,” IEEE Trans. Aerosp. Electron. Syst., vol. 40, no. 1, pp. 158–167, 2004.
[8] M. I. Salfi, U. Ahsun, and H. A. Bhatti, “Lateral and longitudinal guidance and control design of a UAV in auto landing phase,” in 6th International Bhurban Conference on Applied Sciences & Technology, 2009, pp. 162–168.
[9] J.-G. Juang, L.-H. Chien, and F. Lin, “Automatic landing control system design using adaptive neural network and its hardware realization,” IEEE Syst. J., vol. 5, no. 2, pp. 266–277, 2011.
[10] Y. Li, Z. Wang, N. Sundararajan, and P. Saratchandran, “Neuro-controllers for aircraft auto-landing under severe wind conditions,” in Proceedings of the 2003 American Control Conference, 2003., 2003, vol. 2, pp. 1296–1301.
[11] W. Rui, Z. Zhou, and S. Yanhang, “Robust landing control and simulation for flying wing UAV,” in 2007 Chinese Control Conference, 2007, pp. 600–604.
[12] B. Chen, W.-L. Cao, H.-C. Zhang, and L. Feng, “Model Predictive Control Research Based on Auto Landing System,” in 2007 International Conference on Machine Learning and Cybernetics, 2007, vol. 1, pp. 398–402.
[13] I. Furtat, K. A. Khvostova, and D. A. Khvostov, “Adaptive Control of Aircraft Lateral Movement in Landing Mode,” IFAC-PapersOnLine, vol. 48, no. 11, pp. 211–215, 2015.
[14] S. Sarkka and A. Nummenmaa, “Recursive noise adaptive Kalman filtering by variational Bayesian approximations,” IEEE Trans. Automat. Contr., vol. 54, no. 3, pp. 596–600, 2009.
[15] M. Pachter, “Kalman filtering when the large bandwidth control is not known,” IEEE Trans. Aerosp. Electron. Syst., vol. 48, no. 1, pp. 542–551, 2012.
[16] B. Chen, L. Yu, and W.-A. Zhang, “Robust Kalman filtering for uncertain state delay systems with random observation delays and missing measurements,” IET Control Theory Appl., vol. 5, no. 17, pp. 1945–1954, 2011.
[17] C.-L. Wei, J.-H. Tsai, S.-M. Guo, and L.-S. Shieh, “Universal predictive Kalman filter-based fault estimator and tracker for sampled-data non-linear time-varying systems,” IET Control theory Appl., vol. 5, no. 1, pp. 203–220, 2011.
[18] K. Lau, R. Lopez, and E. Onate, “Neural Networks for Optimal Control of Aircraft Landing Systems,” in World Congress on Engineering, 2007, vol. 2.
Authorized licensed use limited to: Helsingin Yliopisto. Downloaded on October 14,2021 at 05:08:18 UTC from IEEE Xplore. Restrictions apply.
Related Documents











