University of Alberta Power Quality Characteristics of MGN Distribution Systems by Janak Raj Acharya A thesis submitted to the Faculty of Graduate Studies and Research in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Power Engineering and Power Electronics Electrical and Computer Engineering ©Janak Raj Acharya Edmonton, Alberta Fall 2010 Permission is hereby granted to the University of Alberta Libraries to reproduce single copies of this thesis and to lend or sell such copies for private, scholarly or scientific research purposes only. Where the thesis is converted to, or otherwise made available in digital form, the University of Alberta will advise potential users of the thesis of these terms. The author reserves all other publication and other rights in association with the copyright in the thesis and, except as herein before provided, neither the thesis nor any substantial portion thereof may be printed or otherwise reproduced in any material form whatsoever without the author's prior written permission.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

University of Alberta
Power Quality Characteristics of MGN Distribution Systems
by
Janak Raj Acharya
A thesis submitted to the Faculty of Graduate Studies and Research in partial fulfillment of the requirements for the degree of
Doctor of Philosophy
in
Power Engineering and Power Electronics
Electrical and Computer Engineering
©Janak Raj Acharya Edmonton, Alberta
Fall 2010
Permission is hereby granted to the University of Alberta Libraries to reproduce single copies of this thesis and to lend or sell such copies for private, scholarly or
scientific research purposes only. Where the thesis is converted to, or otherwise made available in digital form, the University of Alberta will advise potential users of the
thesis of these terms.
The author reserves all other publication and other rights in association with the copyright in the thesis and, except as herein before provided, neither the thesis nor
any substantial portion thereof may be printed or otherwise reproduced in any material form whatsoever without the author's prior written permission.
Library and Archives Canada
Published Heritage Branch
Bibliotheque et Archives Canada
Direction du Patrimoine de I'edition
395 Wellington Street Ottawa ON K1A0N4 Canada
395, rue Wellington Ottawa ON K1A 0N4 Canada
Your file Votre reference
ISBN: 978-0-494-87885-9
Our file Notre reference
ISBN: 978-0-494-87885-9
NOTICE:
The author has granted a nonexclusive license allowing Library and Archives Canada to reproduce, publish, archive, preserve, conserve, communicate to the public by telecommunication or on the Internet, loan, distrbute and sell theses worldwide, for commercial or noncommercial purposes, in microform, paper, electronic and/or any other formats.
AVIS:
L'auteur a accorde une licence non exclusive permettant a la Bibliotheque et Archives Canada de reproduire, publier, archiver, sauvegarder, conserver, transmettre au public par telecommunication ou par I'lnternet, preter, distribuer et vendre des theses partout dans le monde, a des fins commerciales ou autres, sur support microforme, papier, electronique et/ou autres formats.
The author retains copyright ownership and moral rights in this thesis. Neither the thesis nor substantial extracts from it may be printed or otherwise reproduced without the author's permission.
L'auteur conserve la propriete du droit d'auteur et des droits moraux qui protege cette these. Ni la these ni des extraits substantiels de celle-ci ne doivent etre imprimes ou autrement reproduits sans son autorisation.
In compliance with the Canadian Privacy Act some supporting forms may have been removed from this thesis.
While these forms may be included in the document page count, their removal does not represent any loss of content from the thesis.
Conformement a la loi canadienne sur la protection de la vie privee, quelques formulaires secondaires ont ete enleves de cette these.
Bien que ces formulaires aient inclus dans la pagination, il n'y aura aucun contenu manquant.
Canada

Examining Committee
Wilsun Xu, Electrical and Computer Engineering
John Salmon, Electrical and Computer Engineering
Venkata Dinavahi, Electrical and Computer Engineering
Ming Zuo, Mechanical Engineering
David Xu, Electrical and Computer Engineering, Ryerson University
Abstract
Modern power distribution systems in North America adopt
multi-grounded neutral (MGN) configuration. The presence of the
neutral conductor and its grounding arrangement make it difficult to
understand and characterize the system's behavior. Examples are the
temporary overvoltage (TOV) and ground potential rise (GPR)
problems when the system experiences faults, and the stray voltages
and telephone interference problems when the system is in normal
operating condition.
These problems cannot be investigated by using the well-known
symmetrical-components-based techniques since they cannot include
the neutral conductors. The circuit-based simulation methods such as
the EMTP package are capable of simulating complex MGN systems,
but offer few insights into the underlying mechanisms of the electrical
phenomena involved. Therefore, some new analytical approaches that
can bridge the gaps in MGN system assessment need to be established.
The main objectives of this thesis are to develop an analytical
understanding of the electric characteristics of the MGN system, with
the phenomena of ground potential rise, temporary overvoltage and
stray voltage as the main focus. Based on the analytical results
obtained in this research, the important MGN parameters are
identified, and some of the complex phenomena are clarified. These
findings are applied to establish a novel concept that determines the
contributions of off-site and on-site sources to the stray voltage level at
the utility-customer interface point. Extensive simulation and
measurement studies demonstrate the effectiveness of the proposed
method.
Acknowledgements
First and foremost, I would like to thank and express my deep
appreciation to my supervisor, Professor Wilsun Xu, for his invaluable
guidance, support, encouragement, and patience throughout the course
of this research work. It has been my honor and privilege to work
under his supervision.
As well, I highly appreciate the scholarships, teaching assistantships,
and travel grants that I received from the University of Alberta, and
the research assistantship that I received from Professor Xu.
I would like to thank all my colleagues for their friendship and for
providing a congenial environment in the power lab. It was a great
opportunity to work with them, especially Yunfei Wang, during the
various stages of this project. I am also grateful to Dr. Ved Sharma,
Andrew Hakman and Govin Timsina for providing access to their
homes for collecting experimental data.
I am grateful to my parents and siblings in Nepal, cousin Dr. Nirmala
Sharma and her family in Saskatoon, Canada and cousin Tarapati
Paudel in Edmonton, Canada for their love, enduring support, and
encouragement.
Finally, I would like to express my sincere appreciation to my wife,
Bhagawati Poudel. Without her endless support, patience and
encouragement, this work would have never been completed. I dedicate
this thesis to her.
Table of Contents
1. Introduction 1
1.1 Problems with MGN System Performances 1
1.2 Challenges of MGN in Power System Analysis 5
1.3 Research Objectives 7
1.4 Main Contributions of the Thesis 8
1.5 Organization of the Thesis 10
1.6 Assumptions and Limitations of the Thesis 11
2. Overview of MGN Systems and Previous Research 13
2.1 Characteristics of MGN Systems 13
2.1.1 Grounding of Neutral, Substation and Transformer 14
2.1.2 Phase-to-Neutral Coupling 20
2.1.3 Load Unbalance 21
2.1.4 Neutral Current Harmonics 22
2.2 Current and Voltage Distribution in MGN Neutral 25
2.2.1 Neutral Currents and Voltages during Steady State 26
2.2.2 Neutral Currents and Voltages during Faults 27
2.3 Overview of the Previous Research 30
2.3.1 Determination of Line Parameters 30
2.3.2 Symmetrical Components and Their Limitations 33
2.3.3 Multi-phase Circuit Analysis and Tools 36
2.3.4 Secondary Circuit Analysis 39
2.4 Summary 40
3. Analytical Approaches to Ground Potential Rise Assessment 42
3.1 Ground Potential Rise of MGN Neutral 42
3.2 Proposed Approach 43
3.3 Equivalent Impedance of MGN Network 44
3.4 Mechanism of GPR Generation 49
3.4.1 Neutral Terminated in the Substation 52
3.4.2 Neutral Isolated from the Substation 53
3.4.3 Phase-to-Neutral Faults 54
3.5 Analytical and Simulation Results 55
3.6 Application Examples 57
3.6.1 Underbuilt Distribution Line 58
3.6.2 Aerial-lift Vehicle Working under the Power Lines 62
3.7 Practical Issues of Proposed Technique 64
3.7.1 Irregular Grounding Interval 64
3.7.2 Non-identical Grounding Resistances 65
3.7.3 Line-to-Line Fault 65
3.8 Conclusions 65
4. Analytical Approaches to Temporary Overvoltage Assessment....67
4.1 Introduction 67
4.2 Temporary Overvoltage Assessment 68
4.2.1 Mechanism of Temporary Overvoltage 69
4.2.2 Substation Neutral Voltage Rise 71
4.2.3 Voltage Induced by Fault Current 72
4.2.4 Voltage Induced by Neutral Current 72
4.3 Analytical and Simulation Results 77
4.4 Sensitivity Studies 79
4.4.1 Effect of Neutral Grounding Resistance 79
4.4.2 Effect of Neutral Conductor Size 80
4.4.3 Effect of Neutral Grounding Interval 81
4.5 Application of Analytical Investigations 82
4.6 Conclusions 84
5. A Novel Approach to Stray Voltage Contribution Determination. 85
5.1 Introduction 85
5.1.1 Terms and Definitions 86
5.1.2 Main Causes of Stray Voltage 88
5.2 Mechanism of Stray Voltage Generation 89
5.3 Proposed Measurement-Based Approach 90
5.3.1 Concepts and Motivation 92
5.3.2 Modeling the Stray Voltage Sources 95
5.4 Analytical Investigation 97
5.4.1 Decoupling the Neutral Current 97
5.4.2 Calculation of Current Return Ratio 99
5.4.3 Ground Currents and Their Contributions 105
5.5 Simulation Verifications 107
5.5.1 Simulation Study 107
5.5.2 Verification of Current Return Ratio 108
5.5.3 Verification of Current and Stray Voltage 109
5.6 Field Test Results Ill
5.6.1 Instrument Set-up Ill
5.6.2 Stray Voltage and Neutral Current 112
5.6.3 Neutral Current Return Ratio 113
5.6.4 Contributions of Utility and Customer 114
5.7 Application and Sensitivity Study 118
5.7.1 Customer Grounding Conditions 118
5.7.2 Secondary Neutral Conductor Conditions 119
5.7.3 Primary Neutral Grounding Conditions 121
5.7.4 Broken Primary Neutral 122
5.7.5 Operating Customer Loads Only 124
5.7.6 Operating Feeder Load Only 125
5.8 Implementation Issues 126
5.8.1 Measurement Duration 126

5.8.3 Load Configuration 130
5.9 Conclusions 133
6. Conclusions and Recommendations 135
6.1 Conclusions 135
6.2 Recommendations for Future Work 138
6.2.1 Estimating the GPR along the Neutral Length 138
6.2.2 Stray Voltage Tracking 139
References 141
Appendices 152
A. Resistance of Ground Rod with Variety of Soils 152
B. Substation Source Impedance 153
C. Stray Voltage and Neutral Current Harmonics 155
List of Tables
Table 2.1 Equivalent resistance of multiple ground rods 18
Table 3.1 MGN system impedance data 55
Table 3.2 Impedance data for the underbuilt circuit 59
Table 4.1 Nomenclature of parameters 70
Table 4.2 Phase voltage components for the fault at 6km 76
Table 4.3 Percentage contribution of individual factors to Vb 77
Table 4.4 Percentage contribution of individual factors to Vc 78
Table 5.1 Neutral network parameters 100
Table 5.2 K for various Rgn and Rc 101
Table 5.3 K for various Rgn and Rc for a bad neutral 102
Table 5.4 Customer loads and their impedance model 107
Table 5.5 Feeder loads and their impedance model 107
Table 5.6 Currents measured in the simulation 108
Table 5.7 Verification of the current return ratio (K) 109
Table 5.8 Verification of ground currents 110
Table 5.9 Comparison of the changes in currents 110
Table 5.10 Verification of stray voltages 110
Table 5.11 Stray voltages with a broken primary neutral 123
Table 5.12 Stray voltages for different loading conditions 125
Table 5.13 Impact of two-phase loads 132
Table A.l Resistivity of variety of soils and resistances of a 10ft rod. 152
List of Figures
Figure 1.1 Configurations of distribution systems 2
Figure 1.2 Four-wire MGN system 3
Figure 2.1 Layout of MGN distribution system 14
Figure 2.2 Distribution neutral grounding 15
Figure 2.3 Ground rod driven into the earth 16
Figure 2.4 Substation grid and transformer grounding 19
Figure 2.5 Distribution transformer grounding 20
Figure 2.6 Neutral current due to coupling effects 21
Figure 2.7 Many single-phase loads connected to the system 21
Figure 2.8 Currents in the three phases and neutral 22
Figure 2.9 Harmonic spectra of the currents (60Hz removed) 23
Figure 2.10 Harmonic spectra of the currents (9th to 27th order) 23
Figure 2.11 MGN system with four possible neutral layouts 25
Figure 2.12 Neutral current distribution during steady state 26
Figure 2.13 Neutral voltage distribution during steady state 27
Figure 2.14 Neutral current distribution during a fault in the middle.
28
Figure 2.15 Neutral current distribution during a fault at the end 28
Figure 2.16 Distribution of GPR during a fault in the middle 29
Figure 2.17 Distribution of GPR during a fault at the end 30
Figure 2.18 Geometry of the conductors 31
Figure 2.19 Three-phase line impedances 34
Figure 2.20 Sequence components of phase voltages 34
Figure 2.21 Analytical and simulation approaches 38
Figure 3.1 Current through a ground resistance during a fault 43
Figure 3.2 The GPR model of MGN network 44
Figure 3.3 The MGN ladder network 45
Figure 3.4 Impedance of MGN ladder for various resistances 47
Figure 3.5 Impedance of MGN ladder for various conductor sizes 47
Figure 3.6 Impedance of MGN ladder for various grounding spans. ...48
Figure 3.7 Equivalent impedance of MGN ladder at fault location 48
Figure 3.8 Induced voltages in the neutral during a SLG fault 49
Figure 3.9 Step-by-step transformation of MGN network 50
Figure 3.10 GPRs caused by the individual current sources 51
Figure 3.11 Net GPR due to two current sources 51
Figure 3.12 Shunt current sources for a line-to-wire fault 54
Figure 3.13 Distribution of GPR along the neural wire 56
Figure 3.14 Analytical and simulation results of maximum GPRs 57
Figure 3.15 Parallel transmission and distribution lines 58
Figure 3.16 Geometry of the conductors on a shared structure 59
Figure 3.17 Neutral shunt currents for a distribution line fault 60
Figure 3.18 Neutral shunt currents for a transmission line fault 61
Figure 3.19 A truck bonded to the system neutral 63
Figure 3.20 Touch voltage at truck location during a remote fault 63
Figure 4.1 Voltage rise during a fault in the adjacent phase 68
Figure 4.2 A three-phase MGN system under a SLG fault 69
Figure 4.3 Phasor representation of the TOV components 76
Figure 4.4 Main components of the temporary overvoltage 78
Figure 4.5 Comparison of analytical and simulation results 79
Figure 4.6 Effect of grounding resistance on overvoltage 80
Figure 4.7 Effect of neutral conductor size on overvoltage 81
Figure 4.8 Effect of grounding interval on overvoltage 82
Figure 4.9 TOV profiles with fault current and fault distance 83
Figure 5.1 A customer supplied from the MGN feeder 89
Figure 5.2 Electrical bonding in the service panel 90
Figure 5.3 Ground currents from the utility and customer 93
Figure 5.4 Neutral and ground current components 93
Figure 5.5 Current flow pattern in the secondary circuit 96
Figure 5.6 Equivalent model of the stray voltage sources 96
Figure 5.7 Neutral current from the customer loads only 97
Figure 5.8 Neutral current from the utility only 98
Figure 5.9 Variation of K with length of a good neutral 102
Figure 5.10 Variation of K with length of a bad neutral 103
Figure 5.11 Unbalanced current versus neutral current 104
Figure 5.12 Phasor representation of ground current components.... 105
Figure 5.13 Simulation model to verify the current return ratio 108
Figure 5.14 The measurement set-up in a residential facility Ill
Figure 5.15 Stray voltage and neutral current (Site#l) 112
Figure 5.16 Stray voltage and neutral current (Site#2) 113
Figure 5.17 The neutral current return ratio (Site #1) 113
Figure 5.18 The neutral current return ratio (Site#2) 114
Figure 5.19 Ground currents from the utility and customer (Site#l) 115
Figure 5.20 Contributions of the utility and customer (Site#l) 115
Figure 5.21 Ground currents from the utility and customer (Site#2).116
Figure 5.22 Contributions of the utility and customer (Site#2) 116
Figure 5.23 Measured SV and computed ground current (Site#l) 117
Figure 5.24 Measured SV and computed ground current (Site#2) 117
Figure 5.25 Effect of Rc on stray voltage 119
Figure 5.26 Effect of Rc on percentage contributions 119
Figure 5.27 Effect of neutral resistance on stray voltage 120
Figure 5.28 Effect of neutral resistance on percentage contribution. 120
Figure 5.29 Effect of Rgn on stray voltage 121
Figure 5.30 Effect of Rgn on percentage contributions 122
Figure 5.31 Primary neutral broken at X one at a time 123
Figure 5.32 Current flow pattern in a broken neutral 124
Figure 5.33 Percentage contributions with customer load only 125
Figure 5.34 In versus Iu for 5-min data 126
Figure 5.35 In versus Iu for 15-min data 127
Figure 5.36 In versus Iu for 30-min data 127
Figure 5.37 In versus Iu for 1-hour data 128
Figure 5.38 Harmonics of the neutral current 129
Figure 5.39 Harmonics of the stray voltage 129
Figure 5.40 Neutral current return ratios for the harmonics 130
Figure 5.41 Delta-wye conversion of the loads 131
Figure 5.42 Equivalent circuit with wye-connected load 131
Figure 5.43 Three-phase load supplied from the MGN system 133
Figure 6.1 The sample GPR profile 139
Figure B.l Three-phase source with impedances 153
Figure C.l Stray voltage and neutral current (60Hz) 155
Figure C.2 Stray voltage and neutral current (180Hz) 155
Figure C.3 Stray voltage and neutral current (300Hz) 156
Figure C.4 Stray voltage and neutral current (420Hz) 156
Figure C.5 Stray voltage and neutral current (540Hz) 157
EMP
EMTP
GPR
IEEE
KCL
LG
LLG
MGN
MHLF
NESC
NEV
SLG
Sub
SV
TOV
List of Acronyms
Electromagnetic Pulse
Electromagnetic Transient Program
Ground Potential Rise
Institute of Electrical and Electronics Engineers
Kirchhoff s Current Law
Line-to-ground
Line-line-to-ground
Multi-grounded Neutral
Multi-phase Harmonic Load Flow
National Electric Safety Code
Neutral-to-Earth Voltage
Single-line-to-ground
Substation
Stray Voltage
Temporary Overvoltage

1. Introduction
Modern power distribution systems are generally grounded at various
locations across the systems. According to the National Electric Safety
Code [1], the neutral conductor needs to be grounded at least four
times per mile to qualify as a multi-grounded neutral (MGN) system.
Grounding refers to the intentional connection of a system component
to the earth by means of a conductor. The objectives of grounding are to
ensure the proper operation of a system and the safety of the line
workers, public and animals. However, grounding can affect the power
system performance and power quality [2]-[4], The multi-grounding
nature of a distribution system often complicates its performance
analysis. This chapter highlights the problems associated with the
MGN system performance and discusses the challenges faced in power
system analysis concerning MGN systems. Then the objectives and
contributions of this thesis are presented. Finally, the thesis outline
and limitations of the thesis are provided.
1.1 Problems with MGN System Performances
The many types of grounded distribution systems include the three-
wire uni-grounded, four-wire uni-grounded, four-wire multi-grounded
and five-wire multi-grounded systems as shown in Figure 1.1, where A,
B and C represent the phase wires, and N and G represent the neutral
and ground wires, respectively. Every configuration has its advantages
and disadvantages. Among these configurations, the four-wire multi-
- 1 -

grounded neutral (MGN) systems are the preferred choice in North
America [5]-[6]. The term "MGN system" is used throughout this thesis
to refer to the four-wire MGN systems.
(a) Three-wire uni-grounded.
N
(b) Four-wire uni-grounded.
N
TTT7T
(c) Four-wire multi-grounded.
N
T7T7T
(d) Five-wire multi-grounded.
Figure 1.1 Configurations of distribution systems.
The performance characteristics of MGN systems cause various
problems. In this thesis, the temporary overvoltage (TOV) or voltage
swell, ground potential rise (GPR) and stray voltage problems are
investigated. The TOV and GPR problems arise from the faults, or
short circuits, in the system, whereas the stray voltage problem arises
under the normal operations of the system. Historically, the GPR is
concerned mainly with the ground voltage rise in the substation. With
the advent of MGN systems, the ground voltage rise in the grounding
points of the neutral across the system has become a continuous
concern. The basic concepts associated with stray voltage, GPR and
TOV can be illustrated by using the system shown in Figure 1.2.
- 2 -
Phase conductors
Aggregate loads
Source
Neutral conductor
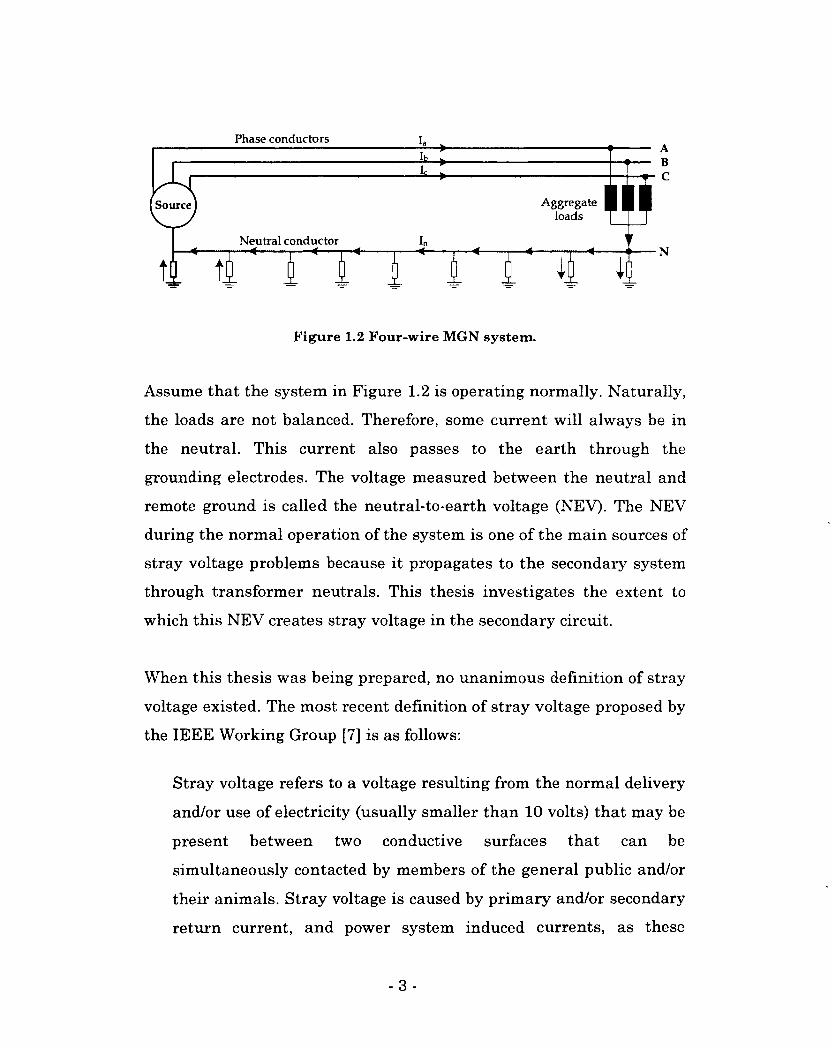
Figure 1.2 Four-wire MGN system.
Assume that the system in Figure 1.2 is operating normally. Naturally,
the loads are not balanced. Therefore, some current will always be in
the neutral. This current also passes to the earth through the
grounding electrodes. The voltage measured between the neutral and
remote ground is called the neutral-to-earth voltage (NEV). The NEV
during the normal operation of the system is one of the main sources of
stray voltage problems because it propagates to the secondary system
through transformer neutrals. This thesis investigates the extent to
which this NEV creates stray voltage in the secondary circuit.
When this thesis was being prepared, no unanimous definition of stray
voltage existed. The most recent definition of stray voltage proposed by
the IEEE Working Group [7] is as follows:
Stray voltage refers to a voltage resulting from the normal delivery
and/or use of electricity (usually smaller than 10 volts) that may be
present between two conductive surfaces that can be
simultaneously contacted by members of the general public and/or
their animals. Stray voltage is caused by primary and/or secondary
return current, and power system induced currents, as these
- 3 -
currents flow through the impedance of the intended return
pathway, its parallel conductive pathways, and conductive loops in
close proximity to the power system.
Historically, the main concern regarding stray voltage was its
interference with dairy farm animals, but recently, stray voltage has
been a wider concern in North America. Evidence of stray voltage in
swimming pools, shower stalls, and public places has been reported [8].
As well, investigations have been carried out, and mitigation measures
have been implemented on a case-by-case basis. Contact voltage is
another phenomenon which is sometimes incorrectly referred to as
stray voltage. Contact voltage exists during faults and in levels that
can be dangerous, but is not included within the scope of this research
project.
Now consider a LG fault on Phase C between the source and loads in
Figure 1.2. Unlike the case of normal operation, a significantly large
current will flow in the neutral due to the mutual coupling effects. A
part of the neutral current dissipates to the earth through grounding
resistances, and large voltages are developed across them. The voltage
differential measured between the grounded point of the neutral and
remote earth during the system fault conditions is called the ground
potential rise (GPR). High GPR magnitudes can present a safety
hazard to the line-workers, public and animals and may also damage
nearby telecommunication cables and associated equipment.
The state of increase in the voltage magnitude above the rated
operating voltage is called temporary overvoltage (TOV) or voltage
swell. The voltage magnitude is typically between 1.1 to 1.8 times the
normal voltage for a period of up to one minute [9]-[10]. Overvoltages
- 4 -
can result in insulation failure of equipment, malfunction or damage to
equipment, or failure of surge arresters. The overvoltages in power
systems are usually generated by single-line to ground (SLG) faults,
switching off a large load, or energizing a large capacitor bank [10].
Other causes of overvoltage include a broken neutral, voltage transfer
from the high voltage side, inadvertent backfeeding of a transformer,
or ferroresonance [11]. Among these events, the SLG faults occur most
frequently. This thesis investigates the TOV associated with the SLG
faults. In the event of faults, the induction effects of the fault current
and neutral current can considerably increase the voltages of the
healthy phases.
1.2 Challenges of MGN in Power System Analysis
The MGN schemes have complications and cause problems. Multi-
grounding complicates the system design, especially in terms of
satisfying the power quality and safety requirements. Both theoretical
and technical challenges are associated with the performance analysis
of MGN systems. The symmetrical-components-based techniques used
in most power system analyses cannot be applied to the analysis of the
multi-phase systems with a multi-grounded neutral because these
techniques do not recognize the mutual coupling effects and the
neutral network. In the presence of a neutral conductor, these models
combine its impedance with the impedances of the phase conductors
and treat the grounding resistances as zero, i.e., as a solidly grounded
neutral. Other advanced techniques, such as the EMTP and load flow
programs, cannot reveal the analytical concepts of the interaction of
the various parameters. Therefore, the mechanisms or components
- 5 -
leading to the power quality and safety problems associated with MGN
systems have not been fully analyzed.
It is generally accepted that the short circuit current in MGN
distribution systems is relatively higher compared to that of other
systems. As a result, one may misunderstand that the TOV also
increases, because the traditional methods eliminate the neutral
network to simplify the problem. Similarly, the attributes of the GPR
in the MGN systems are different from those in other systems. The
highest GPR in the MGN network can be found along the neutral
conductor. However, such characteristics of MGN performance cannot
be understood unless the underlying circuit behavior is analytically
proven. This thesis presents the analytical concepts of the TOV and
GPR mechanisms in the presence of a multi-grounded neutral
conductor.
In the past, the stray voltage was found to be a problem within animal
farms, and other stray voltage issues and concerns have been well
documented in recent years. A common reason why stray voltages
originate from MGN schemes has been identified as the neutral-to-
earth voltage (NEV). The NEV transfers to the customer grounds
through the interconnection of the transformer's primary and
secondary neutrals. In addition, on-site sources such as unbalanced
loads are also responsible for stray voltages. Therefore, the
contributions of the main sources need to be identified. However, the
lack of suitable methods for such studies has been the main obstacle in
this area of research. This thesis develops a concept and investigates
the associated method for distinguishing between the main causes of
the off-site and on-site sources of the stray voltage.
- 6 -
1.3 Research Objectives
The primary objectives of the research work described in this thesis
were to investigate the MGN distribution systems to examine the
impacts of the MGN neutral on the ground potential rise (GPR),
temporary overvoltage (TOV) and stray voltage. The objectives of this
research were accomplished by focusing on the following tasks:
• Studying the mechanism of GPR generation in the MGN system
and establishing an analytical technique to determine the GPR
in the MGN neutral. The method identifies the MGN parameters
affecting the GPR.
• Investigating the potential applications of the GPR analysis
technique.
• Studying the mechanism of the TOV in MGN systems. The
neutral conductor is incorporated in the model.
• Identifying the main factors that contribute to the TOV and
developing a method to quantify these factors.
• Developing a concept and associated methods to determine the
contributions of the main stray voltage sources in the customer-
utility interface point.
• Investigating the potential applications and implementation
issues of the proposed method.
- 7 -
1.4 Main Contributions of the Thesis
In order to achieve the research objectives outlined in the previous
section, the performance of the MGN distribution system was
investigated analytically, through simulation and field tests. The main
contributions of this thesis include the following:
• This research illustrates the mechanism of GPR generation in
MGN systems. An analytical method has been developed to
evaluate the GPR. The main advantage of this method is that
the effects of main parameters, such as the grounding interval,
grounding resistance and the size of neutral conductor, can be
readily quantified.
• It is difficult to understand why the maximum GPR in the case
of MGN topology occurs along the neutral wire. A significant
finding of this work is that the maximum GPR occurs at the
location in the grounded node of the neutral where the
equivalent shunt-current source is located.
• The mechanism of the temporary overvoltage (TOV) or voltage
swell in the presence of multi-grounded neutral conductor is
studied. A 'total neutral current' approach is introduced to
incorporate the effect of the neutral currents and an analytical
tool is established to estimate the TOV. The significance of the
analytical formula is that it identifies the factors contributing to
the TOV. It is found that the neutral current can help to reduce
the TOV in the MGN systems.
- 8 -
• Another significant contribution of this thesis is the novel idea
proposed to identify the contributions of stray voltage sources at
the customer-utility interface point. The main advantage of the
proposed measurement-based technique is that the test can be
performed without switching off any loads. Moreover, the
percentage contributions are obtained by measuring the currents
only, but not the voltages so that the ground rod required for a
reference ground is also eliminated.
To date, the findings of this research have resulted in five journal
publications in the field of ground potential rise, overvoltage (or
voltage swell), and coupling effects of neutral currents [12]-[16]. The
findings of this thesis can be applied in various applications. The GPR
analysis technique can be used to estimate the GPR of any multi-
grounded conductors such as the shield wire of the transmission
system and the neutral wire of the distribution system, and the
telephone cable. The results of the TOV analysis are important in
power system applications such as the selection of surge arresters and
insulation coordination. The 'total neutral current' approach
introduced for the TOV calculation is also applicable for analyzing the
power-line-telephone interference problem and estimating the induced
voltages in nearby conductors such as pipelines and cables. The
method developed for allocating the stray voltage contributions can be
used for the trouble-shooting of a stray voltage problem by locating the
main causes. As well, this method has the potential to be implemented
into modern metering equipment to monitor the customer grounding
and neutral conditions.
- 9 -
1.5 Organization of the Thesis
This thesis is organized in six chapters as follows:
Chapter 2 provides the fundamental concepts of multi-grounded
neutral systems. Their basic characteristics such as grounding, neutral
current and voltage distributions and harmonic response are discussed.
An extensive review of previous research focusing on MGN system
performance assessment is provided. This chapter also highlights the
limitations of the existing techniques and discusses the motivation for
this present research.
Chapter 3 presents the analytical techniques for assessing the ground
potential rise (GPR) in MGN systems. The equivalent impedance
approach is introduced to simplify the problem. The GPR analysis
method identifies the factors affecting the amount of GPR that
develops during a SLG fault in the system. This method is applied to
estimate the GPR of the double-circuit line. An example of the
application of this method to the safety analysis of an aerial-lift vehicle
working under a live distribution line is also provided. The analytical
results are confirmed through simulation results.
Chapter 4 discusses the temporary overvoltage (TOV) or voltage swell
in MGN systems. The "total neutral current" approach is proposed to
incorporate the effect of neutral currents. Analytical equations are
developed, and the individual factors contributing to the TOV are
identified. The analytical results closely agree with those of the
simulation method.
- 10 -
Chapter 5 discusses the causes of stray voltage and illustrates the
mechanism of stray voltage generation. In this chapter, a
measurement-based approach is proposed for distinguishing the stray
voltage contributions of the utility (off-site source) and customer (on-
site source). The feasibility of the proposed method is verified through
analytical studies, simulations and field tests. The potential
applications of the method are investigated, and the implementation
issues such as the measurement duration and harmonics are clarified.
Chapter 6 summarizes the main conclusions of this research and
provides recommendations for the future work.
1.6 Assumptions and Limitations of the Thesis
During the preparation of this thesis, many assumptions were made to
focus on the main objectives of the project. As a result, this thesis has
some limitations including the following:
• The grounding impedance of the neutral conductor is assumed to
be purely resistive. The soil is assumed to be uniform, and its
reactance is neglected. The study of multi-layer soil structure is
beyond the scope of this thesis.
• The grounding of the substation is assumed to be resistive. The
other possible grounding configurations, such as capacitive or
inductive grounding, that may exist in the substations are
ignored.
- 11 -
• The concepts and techniques are illustrated by using the three-
phase systems only. However, except for TOV, these techniques
can be applied for single-phase systems as well.
• This project deals with the power frequency phenomena. The
effects of high frequency transients, such as lightning and
capacitive switching, are not considered in the GPR and TOV
studies.
• This research does not examine the effect of nearby electrical
installations or grounded structures on the estimated GPR of the
neutral conductor.
• The stray voltage study is limited to within the main service
panel of a customer. This study does not investigate the effects
that may have on stray voltage due to the presence of other
customers in the neighborhood.
- 12 -
2. Overview of MGN Systems and Previous Research
An overview of MGN systems is given together with a review of
previous research associated with MGN performance evaluation. First,
the characteristics of MGN systems are presented so that the problems
of MGN performance can be understood. Then developments in the
techniques and methods from the literatures are discussed by focusing
on ground potential rise, temporary overvoltage and stray voltage.
2.1 Characteristics of MGN Systems
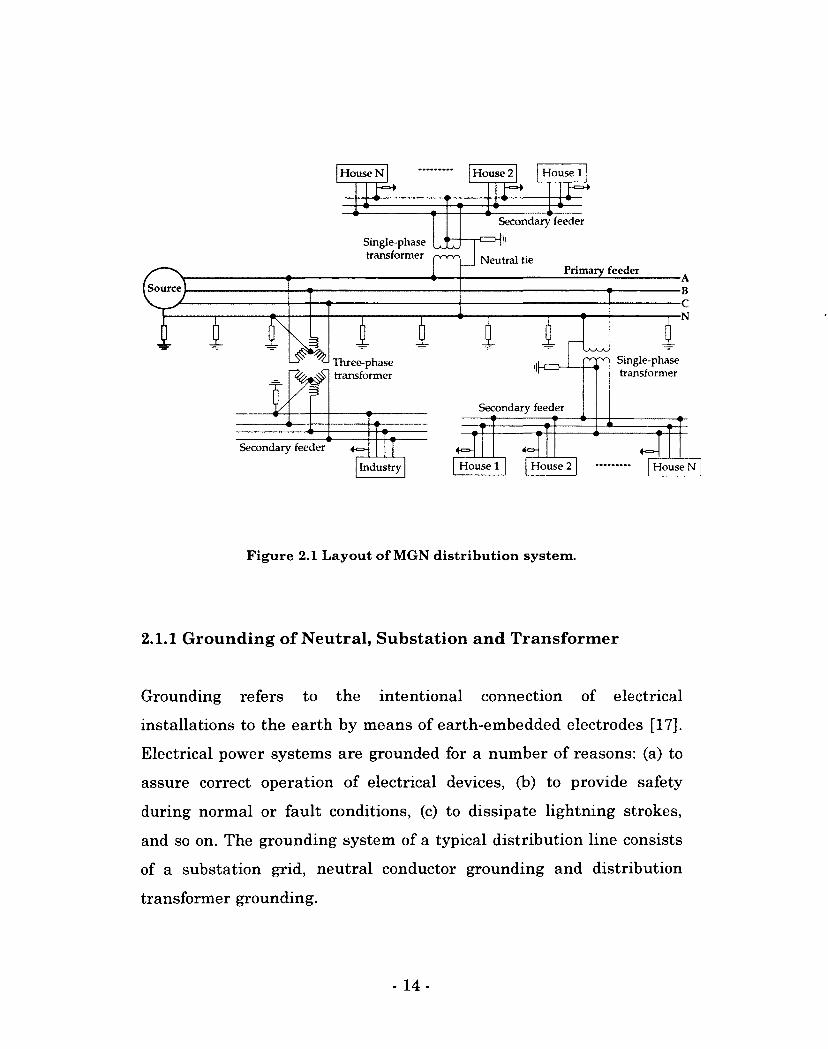
A general layout of an MGN distribution system is shown in Figure
2.1. The primary feeder delivers the electrical power from the source at
the substation to the customers at various locations. The neutral of the
primary feeder is grounded at several points including the transformer
neutrals. For this reason, the system is called the multi-grounded
neutral (MGN) system. The step-down transformers are installed to
provide the power to the consumers at desired voltage levels. The
three-phase loads are supplied through three-phase transformers, and
the single-phase loads are supplied through the single-phase
transformers. The presence of numerous single-phase loads creates an
unbalanced system. On the other hand, these single-phase loads are
often harmonic sources. The neutrals of the primary and secondary
feeders are interconnected. The main characteristics of the MGN
systems are described in the following subsections.
- 13 -
House N House 2 House 1
Secondary feeder
Single-phase transformer fy-TA
"FT
t=Hii Neutral tie
Primary feeder
i r !|[0-
Secondary feeder
Three-phase transformer
I
Secondary feeder
Single-phase transformer
Industry House 1 House 2 House N
Figure 2.1 Layout of MGN distribution system.
2.1.1 Grounding of Neutral, Substation and Transformer
Grounding refers to the intentional connection of electrical
installations to the earth by means of earth-embedded electrodes [17].
Electrical power systems are grounded for a number of reasons: (a) to
assure correct operation of electrical devices, (b) to provide safety
during normal or fault conditions, (c) to dissipate lightning strokes,
and so on. The grounding system of a typical distribution line consists
of a substation grid, neutral conductor grounding and distribution
transformer grounding.
- 14-
2.1.1.1 Grounding of Neutral Conductor
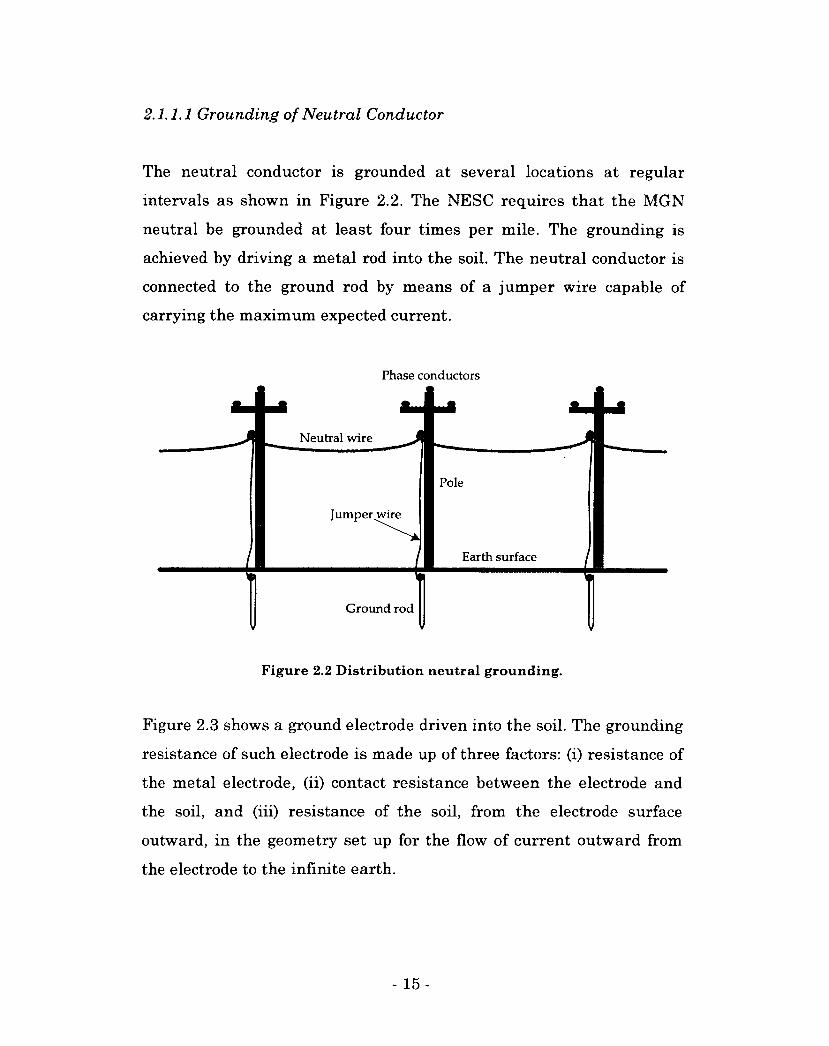
The neutral conductor is grounded at several locations at regular
intervals as shown in Figure 2.2. The NESC requires that the MGN
neutral be grounded at least four times per mile. The grounding is
achieved by driving a metal rod into the soil. The neutral conductor is
connected to the ground rod by means of a jumper wire capable of
carrying the maximum expected current.
Phase conductors
Neutral wire
Pole
Jumper wire
Earth surface
Ground rod
Figure 2.2 Distribution neutral grounding.
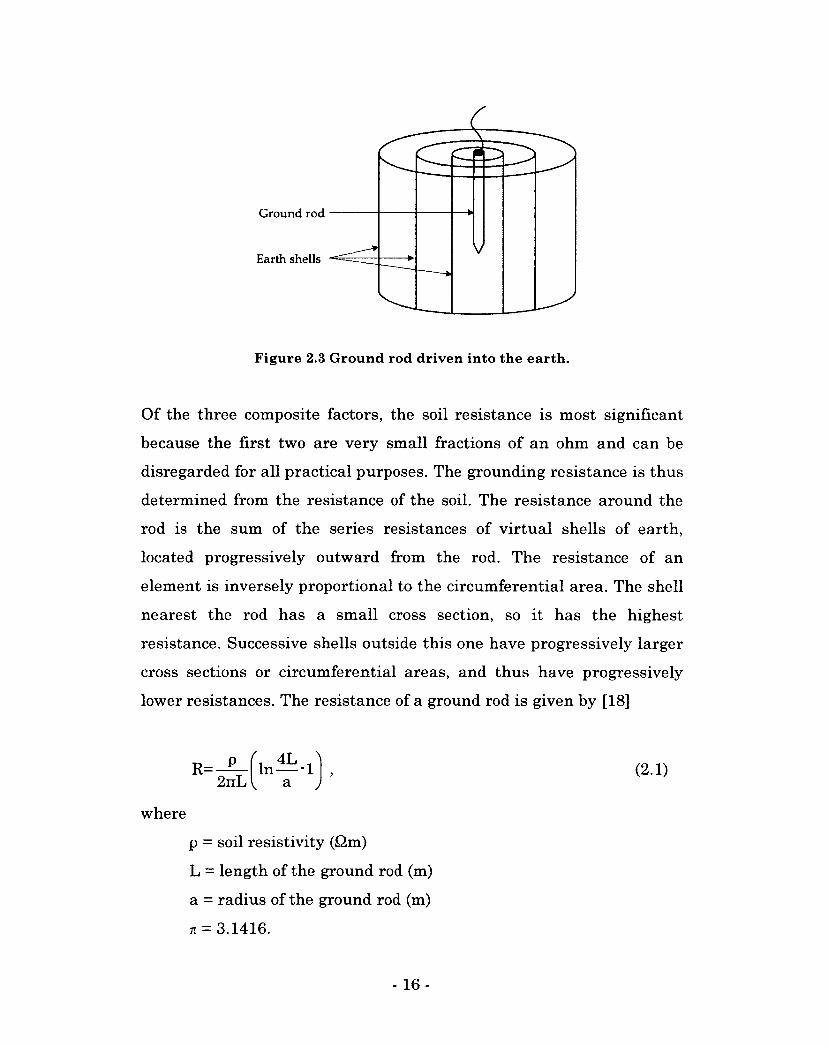
Figure 2.3 shows a ground electrode driven into the soil. The grounding
resistance of such electrode is made up of three factors: (i) resistance of
the metal electrode, (ii) contact resistance between the electrode and
the soil, and (iii) resistance of the soil, from the electrode surface
outward, in the geometry set up for the flow of current outward from
the electrode to the infinite earth.
- 15 -
Ground rod
V Earth shells
Figure 2.3 Ground rod driven into the earth.
Of the three composite factors, the soil resistance is most significant
because the first two are very small fractions of an ohm and can be
disregarded for all practical purposes. The grounding resistance is thus
determined from the resistance of the soil. The resistance around the
rod is the sum of the series resistances of virtual shells of earth,
located progressively outward from the rod. The resistance of an
element is inversely proportional to the circumferential area. The shell
nearest the rod has a small cross section, so it has the highest
resistance. Successive shells outside this one have progressively larger
cross sections or circumferential areas, and thus have progressively
lower resistances. The resistance of a ground rod is given by [18]
(2.1)
where
p = soil resistivity (Qm)
L = length of the ground rod (m)
a = radius of the ground rod (m)
n = 3.1416.
- 1 6 -
A typical ground electrode is a 10ft (3m) long and 5/8 in (16mm)
diameter rod. In practice, the diameter varies only slightly, whereas
the soil resistivity can vary from less than 10£2m to above lOOOQm.
Therefore, the rod's diameter has little effect on the grounding
resistance. The diameter is needed mainly for mechanical strength and
to ensure the rod has enough material to survive corrosion. A rod can
be driven deeper to lower the resistance when the deeper levels of the
soil have lower resistivity. If the desired resistance cannot be achieved
by using one rod, multiple ground rods in parallel can be used to
effectively reduce the overall resistance. Care must be taken when
using multiple rods. When two ground rods are too close together, they
act as one ground rod with a larger diameter, reducing much of the
gain of using parallel rods. A common rule of thumb is to separate the
rods by a distance of at least the length of one of the ground rods. The
NESC requires ground rods to be at least 6ft (1.8m) apart [18]. The
equivalent resistance of n parallel ground rods with this separation is
more than 1/n times the resistance of a single rod as given by (2.2).
Req = -xF, (2.2) n
where
R = grounding resistance of one rod
F = multiplying factor
n = number of rods in parallel.
Table 2.1 presents the number of parallel rods and their equivalent
resistance as a percentage of the resistance of a single ground rod. It is
evident from Table 2.1 that the benefit of using multiple ground rods to
lower the overall grounding resistance decreases as the number of rods
increases.
- 17 -
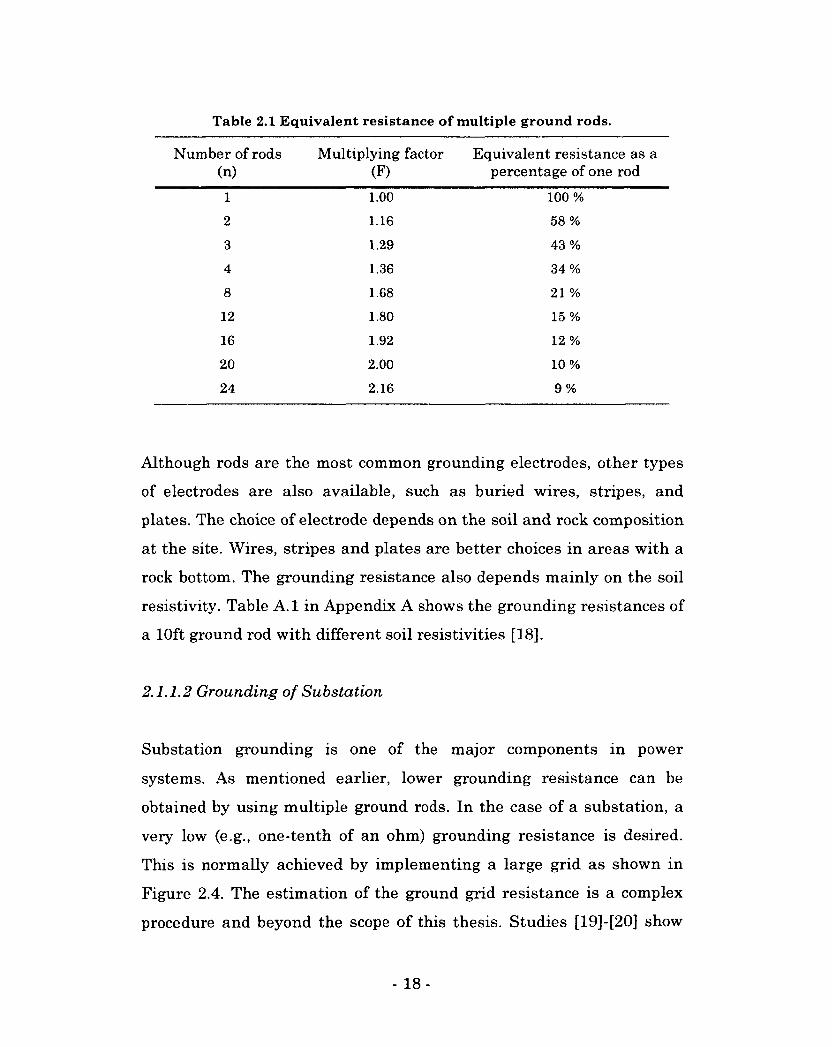
Table 2.1 Equivalent resistance of multiple ground rods.
Number of rods Multiplying factor (F)
Equivalent resistance as a percentage of one rod
1
2
3
4
8
12
16
20
24
1.00
1.16
1.29
1.36
1.68
1.80
1.92
2.00
2.16
100 %
21 %
5 8 %
4 3 %
3 4 %
15 %
12 %
10%
9%
Although rods are the most common grounding electrodes, other types
of electrodes are also available, such as buried wires, stripes, and
plates. The choice of electrode depends on the soil and rock composition
at the site. Wires, stripes and plates are better choices in areas with a
rock bottom. The grounding resistance also depends mainly on the soil
resistivity. Table A. 1 in Appendix A shows the grounding resistances of
a 10ft ground rod with different soil resistivities [18].
2.1.1.2 Grounding of Substation
Substation grounding is one of the major components in power
systems. As mentioned earlier, lower grounding resistance can be
obtained by using multiple ground rods. In the case of a substation, a
very low (e.g., one-tenth of an ohm) grounding resistance is desired.
This is normally achieved by implementing a large grid as shown in
Figure 2.4. The estimation of the ground grid resistance is a complex
procedure and beyond the scope of this thesis. Studies [19]-[20] show
- 18-
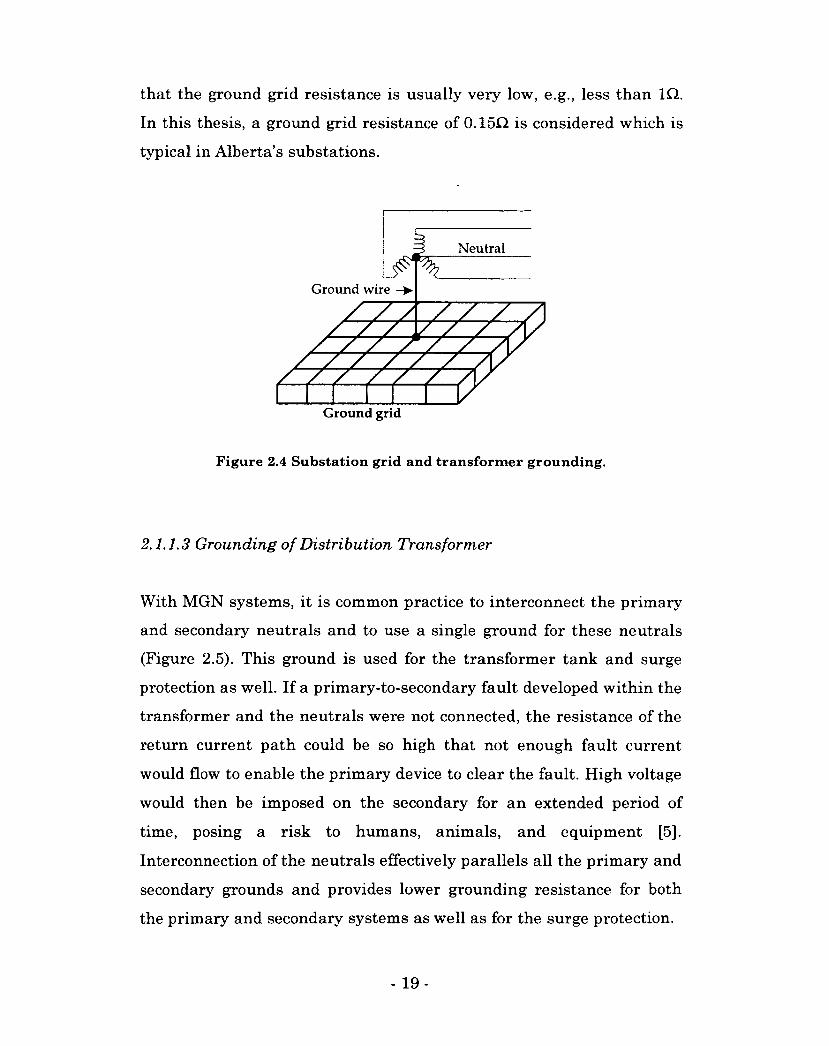
that the ground grid resistance is usually very low, e.g., less than 1Q.
In this thesis, a ground grid resistance of 0.15^2 is considered which is
typical in Alberta's substations.
Neutral
Ground wire
Ground grid
Figure 2.4 Substation grid and transformer grounding.
2.1.1.3 Grounding of Distribution Transformer
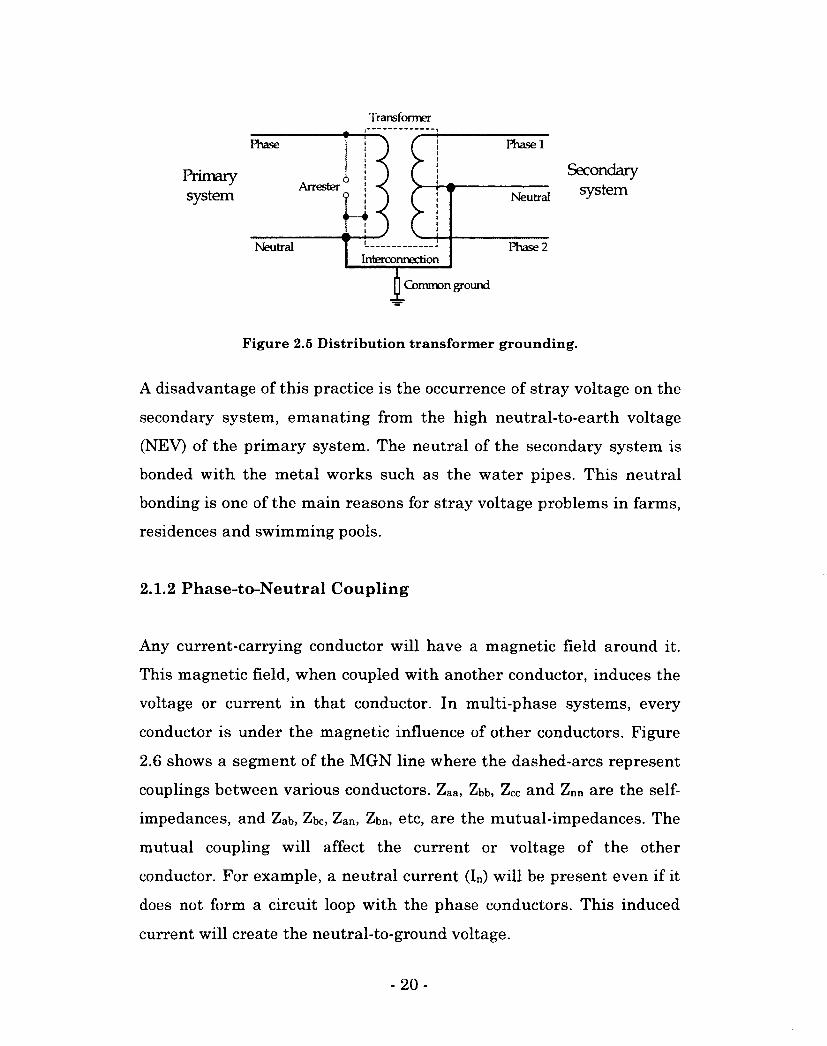
With MGN systems, it is common practice to interconnect the primary
and secondary neutrals and to use a single ground for these neutrals
(Figure 2.5). This ground is used for the transformer tank and surge
protection as well. If a primary-to-secondary fault developed within the
transformer and the neutrals were not connected, the resistance of the
return current path could be so high that not enough fault current
would flow to enable the primary device to clear the fault. High voltage
would then be imposed on the secondary for an extended period of
time, posing a risk to humans, animals, and equipment [5].
Interconnection of the neutrals effectively parallels all the primary and
secondary grounds and provides lower grounding resistance for both
the primary and secondary systems as well as for the surge protection.
- 19-
Transformer
Phase
Primary system
Arrester
Neutral Interconnection
Fhasel
Secondary
"7S5 system
Phase 2
[J Common ground
Figure 2.5 Distribution transformer grounding.
A disadvantage of this practice is the occurrence of stray voltage on the
secondary system, emanating from the high neutral-to-earth voltage
(NEV) of the primary system. The neutral of the secondary system is
bonded with the metal works such as the water pipes. This neutral
bonding is one of the main reasons for stray voltage problems in farms,
residences and swimming pools.
2.1.2 Phase-to-Neutral Coupling
Any current-carrying conductor will have a magnetic field around it.
This magnetic field, when coupled with another conductor, induces the
voltage or current in that conductor. In multi-phase systems, every
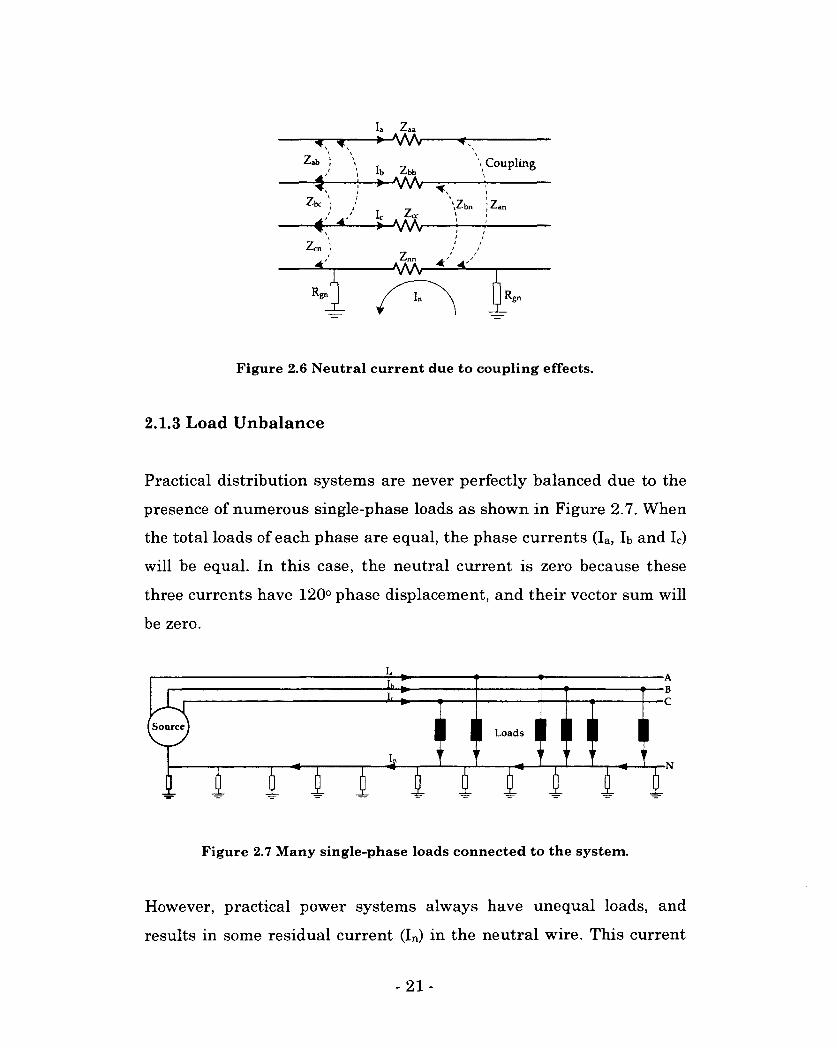
conductor is under the magnetic influence of other conductors. Figure
2.6 shows a segment of the MGN line where the dashed-arcs represent
couplings between various conductors. Zaa, Zbb, Zcc and Znn are the self-
impedances, and Zab, Zbc, Zan, Zbn, etc, are the mutual-impedances. The
mutual coupling will affect the current or voltage of the other
conductor. For example, a neutral current (In) will be present even if it
does not form a circuit loop with the phase conductors. This induced
current will create the neutral-to-ground voltage.
- 20-
—
Zab 1
Zbc ;
Zen I
R, gn
Ia Zaa
•MMr
lb Zbb
-^-AAAr \ Coupling
Ic Zee -*-VW-
\Zbn
Znn
•AAAr •* ̂
In
Figure 2.6 Neutral current due to coupling effects.
2.1.3 Load Unbalance
Practical distribution systems are never perfectly balanced due to the
presence of numerous single-phase loads as shown in Figure 2.7. When
the total loads of each phase are equal, the phase currents (Ia, lb and Ic)
will be equal. In this case, the neutral current is zero because these
three currents have 120° phase displacement, and their vector sum will
be zero.
Ih 1 LI . A I . I Source 1
Loads
I, rr i rn i i •N
Figure 2.7 Many single-phase loads connected to the system.
However, practical power systems always have unequal loads, and
results in some residual current (In) in the neutral wire. This current
- 21 -
returns to the source through the neutral conductor and the earth. The
residual current is in addition to the induced neutral current due to
coupling effects as described in Section 2.1.2. The larger the neutral
current, the higher will be the voltage between the neutral conductor
and the earth (or NEV). Therefore, an unbalanced load in the system
creates the NEV which appears as the stray voltage.
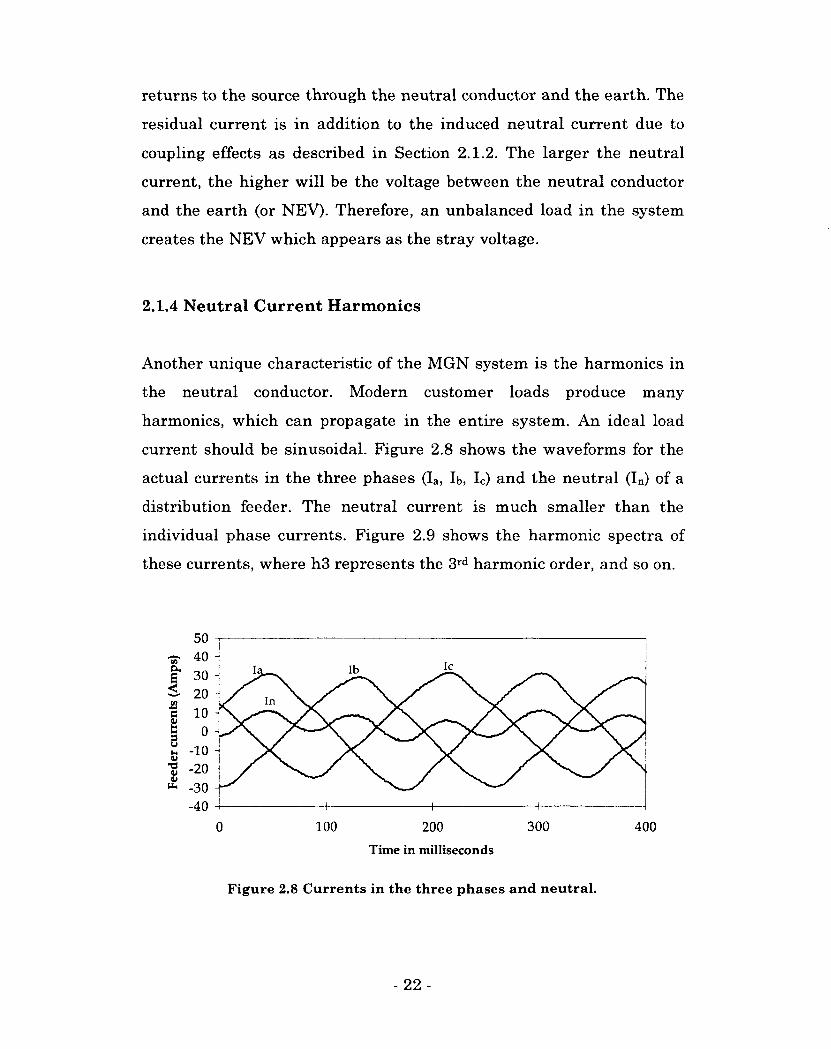
2.1.4 Neutral Current Harmonics
Another unique characteristic of the MGN system is the harmonics in
the neutral conductor. Modern customer loads produce many
harmonics, which can propagate in the entire system. An ideal load
current should be sinusoidal. Figure 2.8 shows the waveforms for the
actual currents in the three phases (Ia, lb, Ic) and the neutral (In) of a
distribution feeder. The neutral current is much smaller than the
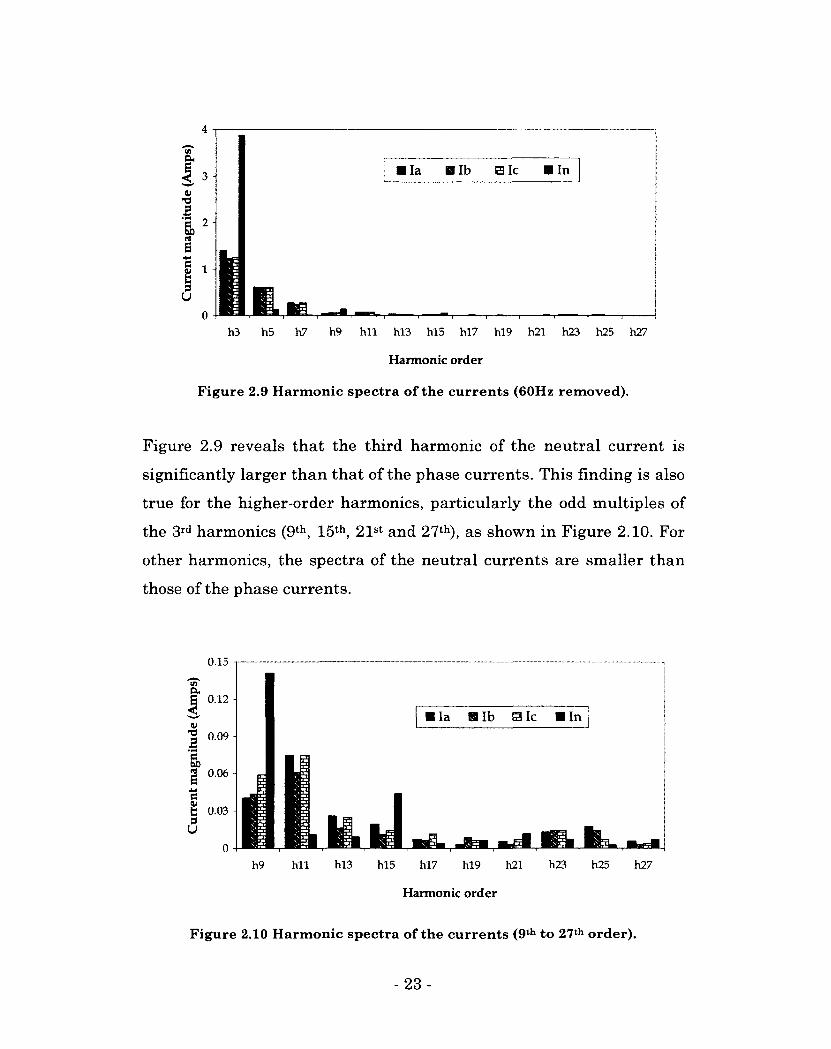
individual phase currents. Figure 2.9 shows the harmonic spectra of
these currents, where h3 represents the 3rd harmonic order, and so on.
50
01 •g -20 -01 * -30 -
-40 -
0 100 200 300 400
Time in milliseconds
Figure 2.8 Currents in the three phases and neutral.
- 22 -
4
I 3 • la H lb £3 Ic • In
01 -a
h3 h5 h7 h9 hll hl3 hl5 hl7 hl9 h21 h23 h25 h27
Harmonic order
Figure 2.9 Harmonic spectra of the currents (60Hz removed).
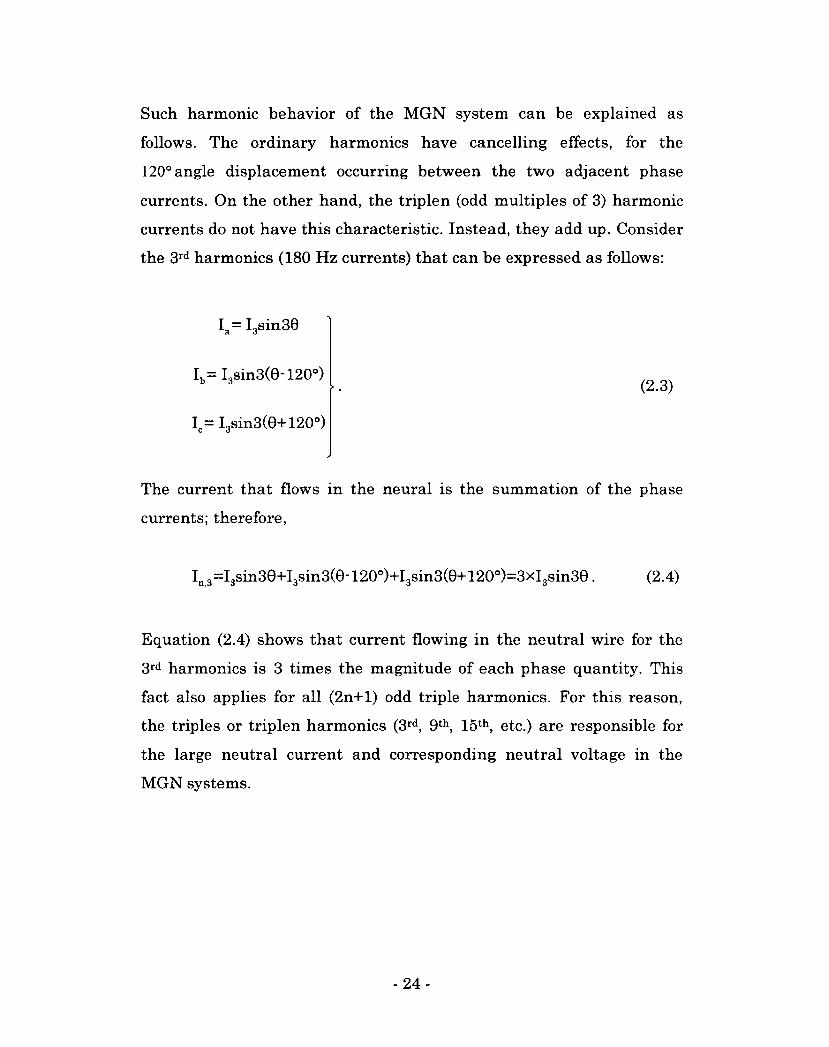
Figure 2.9 reveals that the third harmonic of the neutral current is
significantly larger than that of the phase currents. This finding is also
true for the higher-order harmonics, particularly the odd multiples of
the 3rd harmonics (9th, 15th, 21st and 27th), as shown in Figure 2.10. For
other harmonics, the spectra of the neutral currents are smaller than
those of the phase currents.
0.15
a g 0.12 •
• la S lb 3 Ic • In
Jj 0.09 -
i 1 0.0
£ 0.03 -3
h9 hll hl3 hi 5 hl7 hl9 h21 h23 h25 h27
Harmonic order
Figure 2.10 Harmonic spectra of the currents (9th to 27th order).
- 23 -
Such harmonic behavior of the MGN system can be explained as
follows. The ordinary harmonics have cancelling effects, for the
120° angle displacement occurring between the two adjacent phase
currents. On the other hand, the triplen (odd multiples of 3) harmonic
currents do not have this characteristic. Instead, they add up. Consider
the 3rd harmonics (180 Hz currents) that can be expressed as follows:
Ia= I3sin30
Ib=I3sin3(0-12O°) (23)
Ic= I3sin3(0+12O°)
The current that flows in the neural is the summation of the phase
currents; therefore,
In 3=I3sin30+I3sin3(e- 12O°)+I3sin3(0+12O°)=3xI3sin30. (2.4)
Equation (2.4) shows that current flowing in the neutral wire for the
3rd harmonics is 3 times the magnitude of each phase quantity. This
fact also applies for all (2n+l) odd triple harmonics. For this reason,
the triples or triplen harmonics (3rd, 9th, 15th, etc.) are responsible for
the large neutral current and corresponding neutral voltage in the
MGN systems.
- 24-
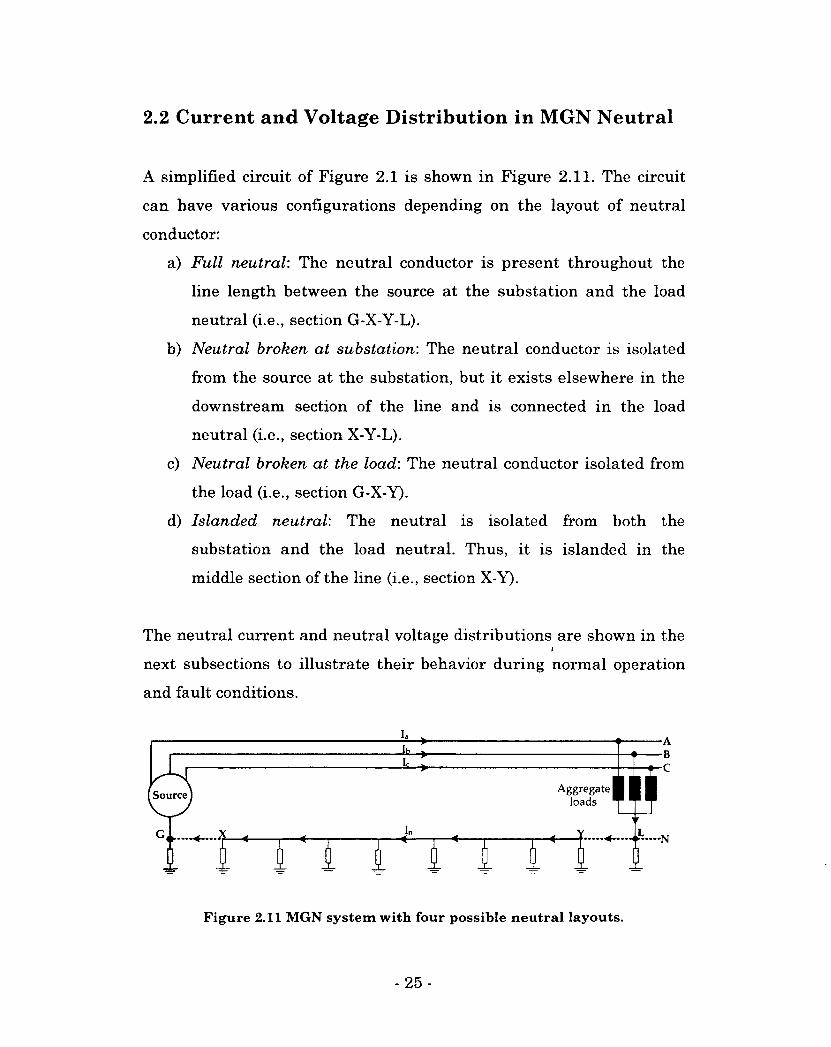
2.2 Current and Voltage Distribution in MGN Neutral
A simplified circuit of Figure 2.1 is shown in Figure 2.11. The circuit
can have various configurations depending on the layout of neutral
conductor:
a) Full neutral: The neutral conductor is present throughout the
line length between the source at the substation and the load
neutral (i.e., section G-X-Y-L).
b) Neutral broken at substation: The neutral conductor is isolated
from the source at the substation, but it exists elsewhere in the
downstream section of the line and is connected in the load
neutral (i.e., section X-Y-L).
c) Neutral broken at the load: The neutral conductor isolated from
the load (i.e., section G-X-Y).
d) Islanded neutral: The neutral is isolated from both the
substation and the load neutral. Thus, it is islanded in the
middle section of the line (i.e., section X-Y).
The neutral current and neutral voltage distributions are shown in the
next subsections to illustrate their behavior during normal operation
and fault conditions.
Source
a.
Aggregatel 11 loads T T
r l ' i ' i i ' A ' i i —< —l •N
i
Figure 2.11 MGN system with four possible neutral layouts.
- 25 -
2.2.1 Neutral Currents and Voltages during Steady State
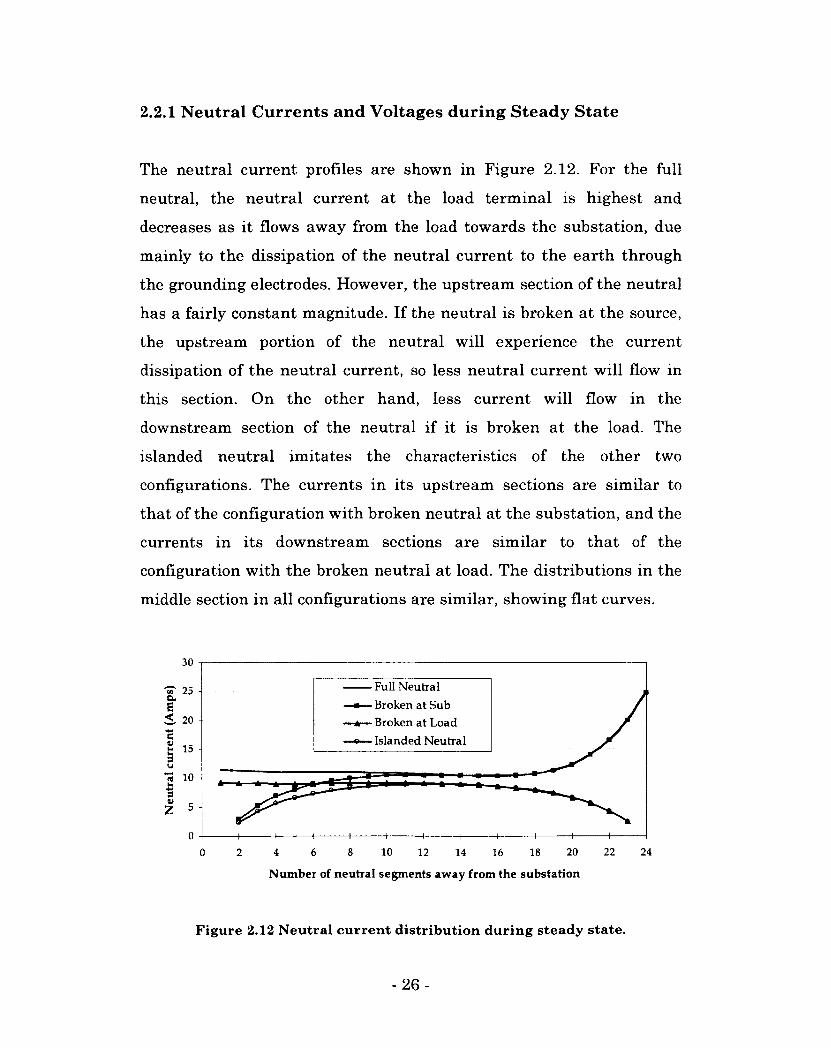
The neutral current profiles are shown in Figure 2.12. For the full
neutral, the neutral current at the load terminal is highest and
decreases as it flows away from the load towards the substation, due
mainly to the dissipation of the neutral current to the earth through
the grounding electrodes. However, the upstream section of the neutral
has a fairly constant magnitude. If the neutral is broken at the source,
the upstream portion of the neutral will experience the current
dissipation of the neutral current, so less neutral current will flow in
this section. On the other hand, less current will flow in the
downstream section of the neutral if it is broken at the load. The
islanded neutral imitates the characteristics of the other two
configurations. The currents in its upstream sections are similar to
that of the configuration with broken neutral at the substation, and the
currents in its downstream sections are similar to that of the
configuration with the broken neutral at load. The distributions in the
middle section in all configurations are similar, showing flat curves.
Full Neutral
Broken at Sub
Broken at Load
Islanded Neutral
"m 25 -
< 20
20 22 6 8 10 24 0 2 4 12 14 16 18
Number of neutral segments away from the substation
Figure 2.12 Neutral current distribution during steady state.
- 2 6 -
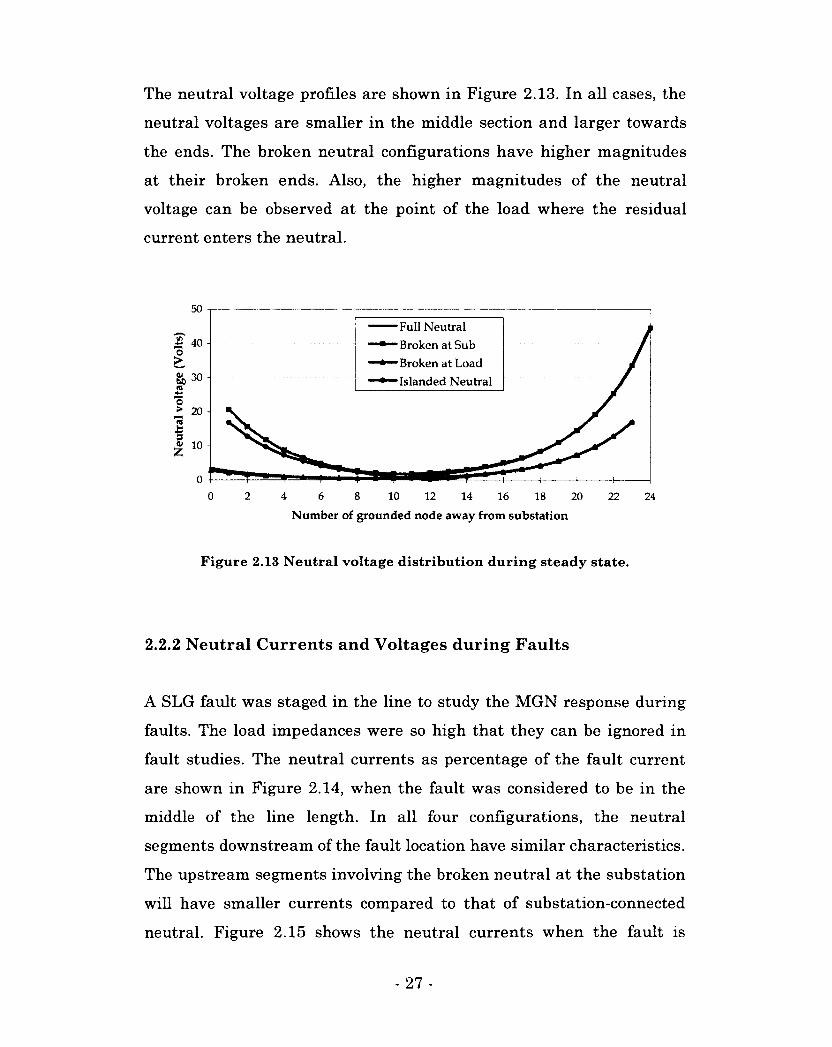
The neutral voltage profiles are shown in Figure 2.13. In all cases, the
neutral voltages are smaller in the middle section and larger towards
the ends. The broken neutral configurations have higher magnitudes
at their broken ends. Also, the higher magnitudes of the neutral
voltage can be observed at the point of the load where the residual
current enters the neutral.
Full Neutral
Broken at Sub
Broken at Load
Islanded Neutral
« 40
v 10
4 6 8 10 12 14 16 18 20
Number of grounded node away from substation
Figure 2.13 Neutral voltage distribution during steady state.
2.2.2 Neutral Currents and Voltages during Faults
A SLG fault was staged in the line to study the MGN response during
faults. The load impedances were so high that they can be ignored in
fault studies. The neutral currents as percentage of the fault current
are shown in Figure 2.14, when the fault was considered to be in the
middle of the line length. In all four configurations, the neutral
segments downstream of the fault location have similar characteristics.
The upstream segments involving the broken neutral at the substation
will have smaller currents compared to that of substation-connected
neutral. Figure 2.15 shows the neutral currents when the fault is
- 27 -
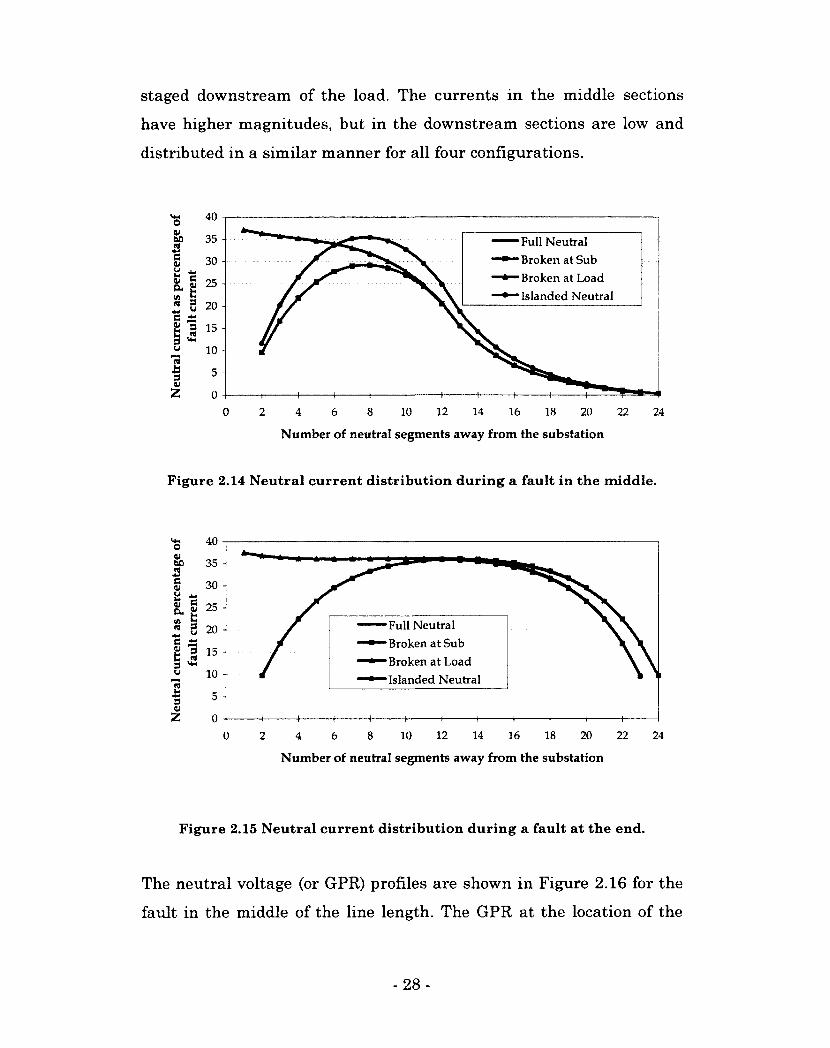
staged downstream of the load. The currents in the middle sections
have higher magnitudes, but in the downstream sections are low and
distributed in a similar manner for all four configurations.
35 - Full Neutral
Broken at Sub
Broken at Load
Islanded Neutral
30 -
10 -
12 2 8 10 14 16 18 20 22 24 0 4 6
Number of neutral segments away from the substation
Figure 2.14 Neutral current distribution during a fault in the middle.
35 -
30 -
Full Neutral
• Broken at Sub
* Broken at Load
• Islanded Neutral 10 -
12 8 10 14 16 18 20 22 24 0 2 4 6
Number of neutral segments away from the substation
Figure 2.15 Neutral current distribution during a fault at the end.
The neutral voltage (or GPR) profiles are shown in Figure 2.16 for the
fault in the middle of the line length. The GPR at the location of the
- 28-
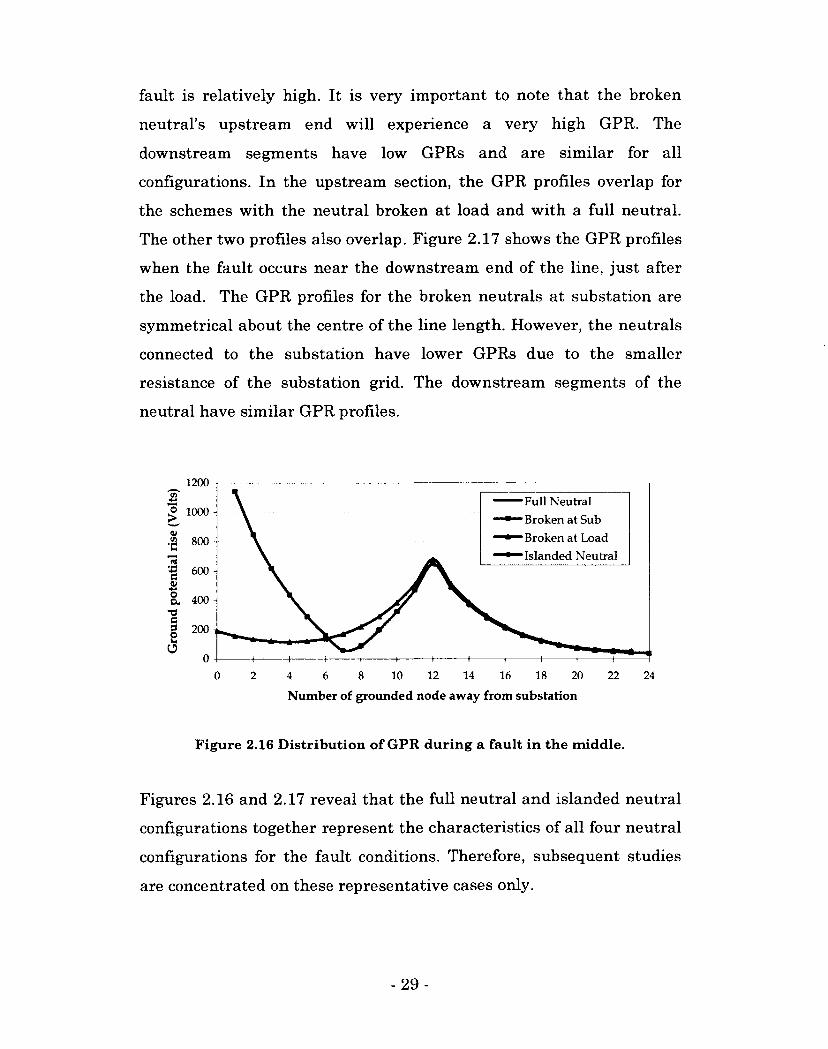
fault is relatively high. It is very important to note that the broken
neutral's upstream end will experience a very high GPR. The
downstream segments have low GPRs and are similar for all
configurations. In the upstream section, the GPR profiles overlap for
the schemes with the neutral broken at load and with a full neutral.
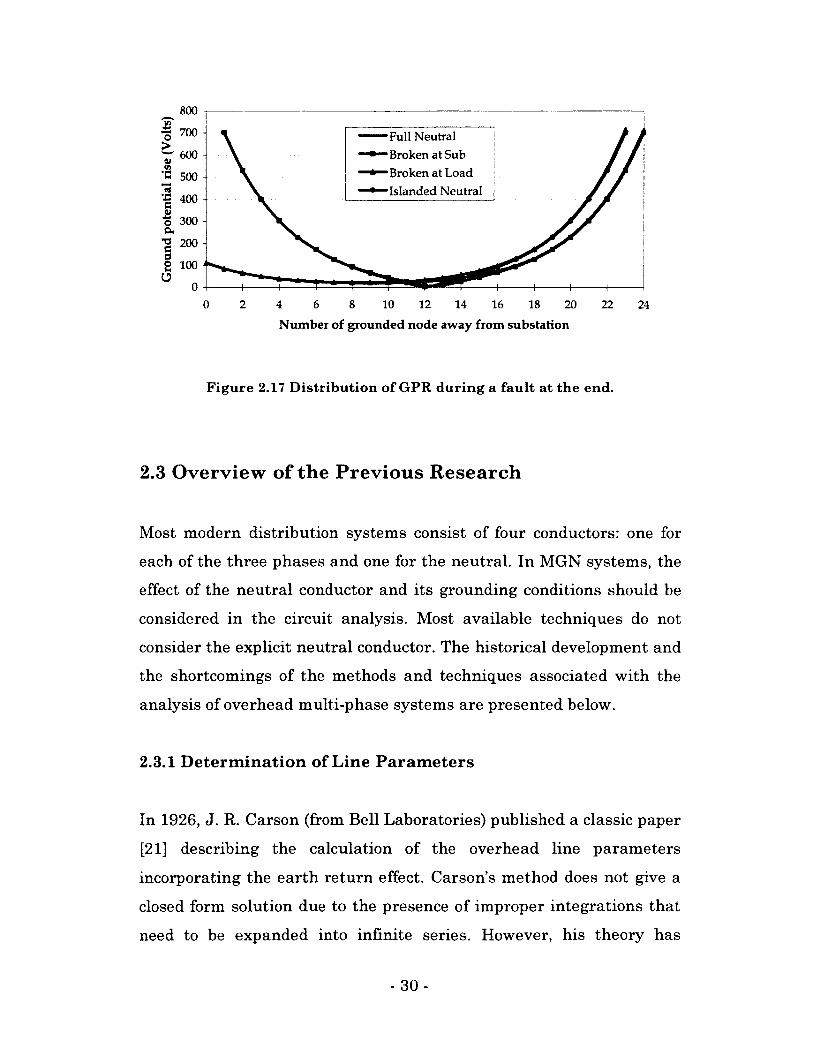
The other two profiles also overlap. Figure 2.17 shows the GPR profiles
when the fault occurs near the downstream end of the line, just after
the load. The GPR profiles for the broken neutrals at substation are
symmetrical about the centre of the line length. However, the neutrals
connected to the substation have lower GPRs due to the smaller
resistance of the substation grid. The downstream segments of the
neutral have similar GPR profiles.
1200
Full Neutral
• Broken at Sub
* Broken at Load
• Islanded Neutral
o 1000 -
12 14 18 0 2 6 8 10 16 20 22 24 4
Number of grounded node away from substation
Figure 2.16 Distribution of GPR during a fault in the middle.
Figures 2.16 and 2.17 reveal that the full neutral and islanded neutral
configurations together represent the characteristics of all four neutral
configurations for the fault conditions. Therefore, subsequent studies
are concentrated on these representative cases only.
- 29 -
800
3 700- Full Neutral
Broken at Sub
Broken at Load
Islanded Neutral
T 600 -
o 300 -a, "5 200 -
2 IOO
2 6 8 10 12 14 16 18 0 4 20 22 24
Number of grounded node away from substation
Figure 2.17 Distribution of GPR during a fault at the end.
2.3 Overview of the Previous Research
Most modern distribution systems consist of four conductors: one for
each of the three phases and one for the neutral. In MGN systems, the
effect of the neutral conductor and its grounding conditions should be
considered in the circuit analysis. Most available techniques do not
consider the explicit neutral conductor. The historical development and
the shortcomings of the methods and techniques associated with the
analysis of overhead multi-phase systems are presented below.
2.3.1 Determination of Line Parameters
In 1926, J. R. Carson (from Bell Laboratories) published a classic paper
[21] describing the calculation of the overhead line parameters
incorporating the earth return effect. Carson's method does not give a
closed form solution due to the presence of improper integrations that
need to be expanded into infinite series. However, his theory has
- 30 -
become the foundation for almost all successive methods of line
parameter calculations. The new methods are based mainly on
approximation [22].
Later, A. Deri [23] proposed the complex depth approach, which
eliminates the improper integrations of Carson's equations. In this
method, the extensive earth is replaced by a set of earth return
conductors located underneath the overhead lines with the depth of
complex value. Another advantage of this method is that additional
terms do not need to be added when calculating high-frequency
impedances. In this thesis, the line parameters were calculated using
this method, which is explained below.
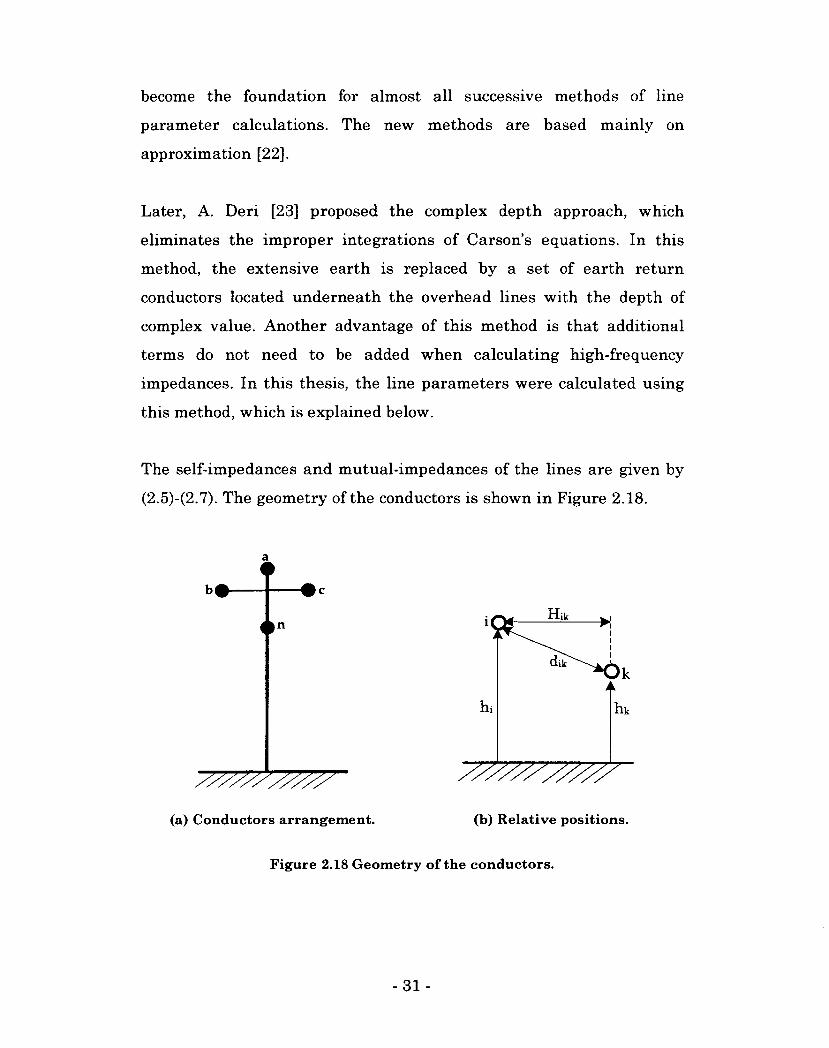
The self-impedances and mutual-impedances of the lines are given by
(2.5)-(2.7). The geometry of the conductors is shown in Figure 2.18.
»n
/////////// ///////////
(a) Conductors arrangement. (b) Relative positions.
Figure 2.18 Geometry of the conductors.
- 31 -
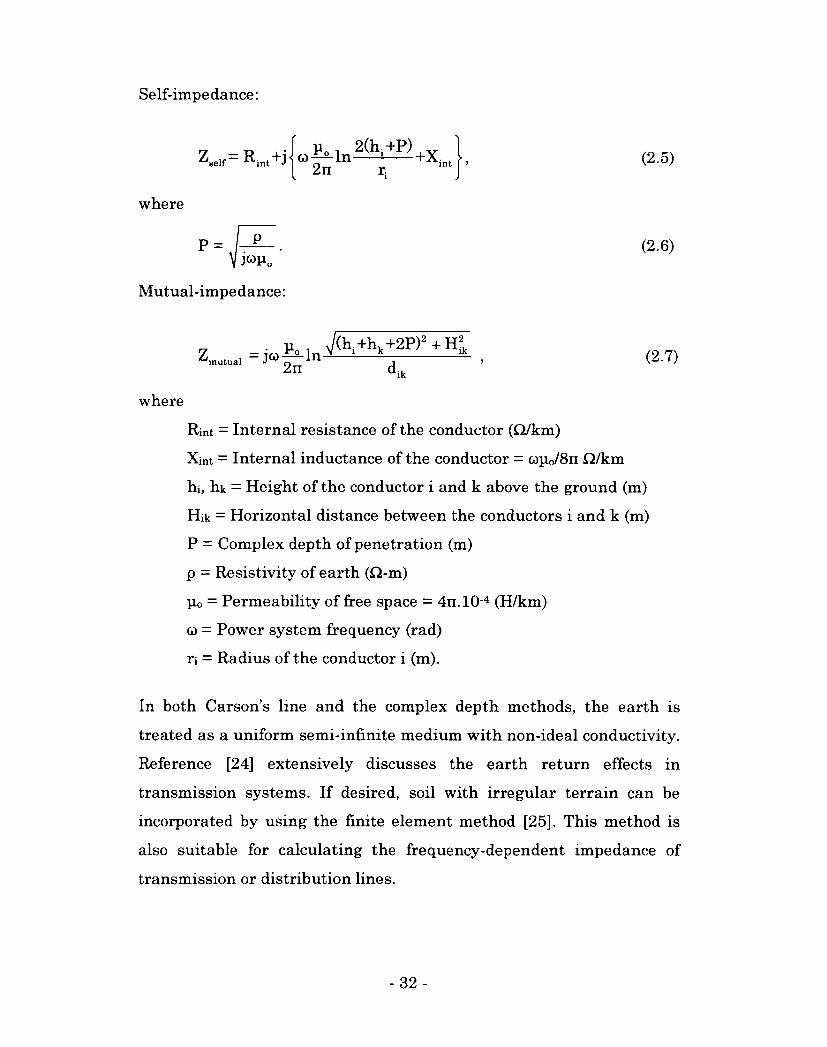
Self-impedance:
^self (2.5)
where
(2.6)
Mutual-impedance:
mutual (2.7)
where
Rint = Internal resistance of the conductor (Q/km)
Xint = Internal inductance of the conductor = «p0/8n £2/km
hi, hk = Height of the conductor i and k above the ground (m)
Hik = Horizontal distance between the conductors i and k (m)
P = Complex depth of penetration (m)
p = Resistivity of earth (£2-m)
p0 = Permeability of free space = 4n.l0 4 (H/km)
co = Power system frequency (rad)
ri = Radius of the conductor i (m).
In both Carson's line and the complex depth methods, the earth is
treated as a uniform semi-infinite medium with non-ideal conductivity.
Reference [24] extensively discusses the earth return effects in
transmission systems. If desired, soil with irregular terrain can be
incorporated by using the finite element method [25]. This method is
also suitable for calculating the frequency-dependent impedance of
transmission or distribution lines.
- 32 -

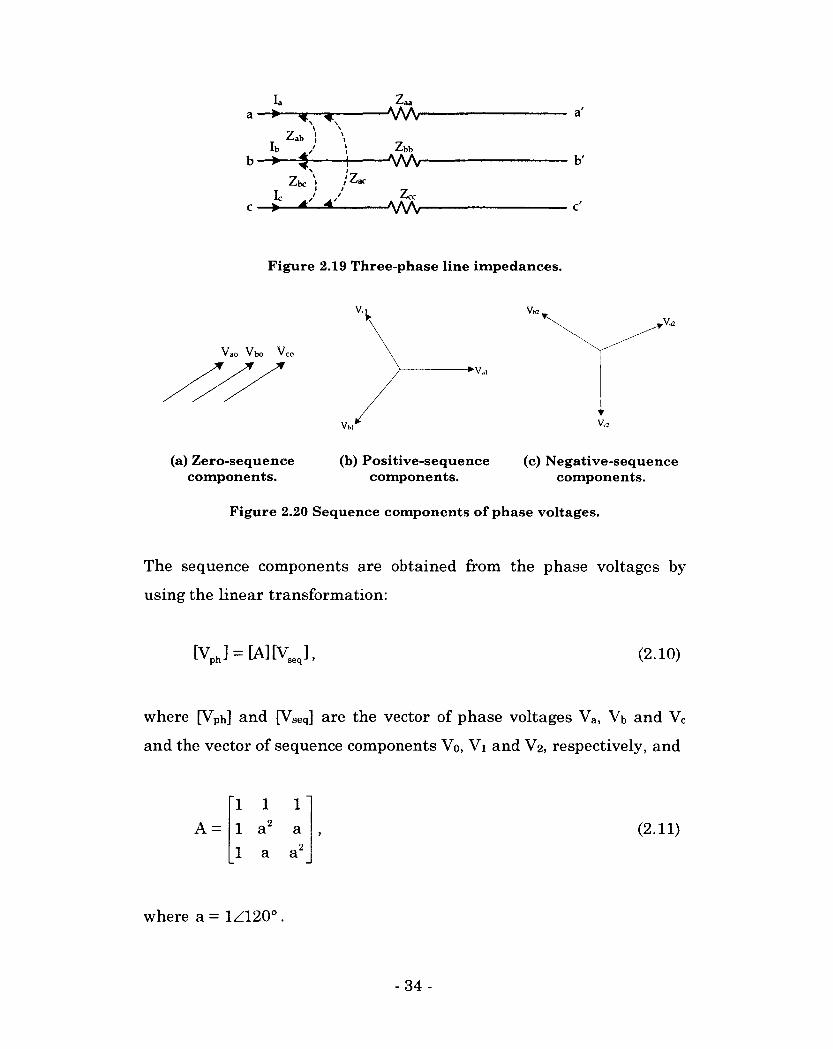
2.3.2 Symmetrical Components and Their Limitations
Consider a simple three-phase line segment of Figure 2.19, where Zaa,
Zbb and Zee are the self-impedances, and Zab, Zbc and Zac are the mutual-
impedances. The voltage drop in the line impedances can be expressed
in the matrix form as
Va," "Zaa Zab Zac" "la"
Vbb. r: zab Zbb Zbc lb (2.8)
Vc, .Zac Zbc Zcc Ic
The lines are balanced when the self-impedances of each phase are
identical (Zs) and the mutual-impedances of each phase are also
identical (Z m)j I.Q.,
When a fault occurs in the line, unequal currents flow in the individual
phases, and the phase voltages will be different. Symmetrical
components were introduced for analyzing the three-phase system of
balanced lines under fault conditions, and with the fault location as the
only unbalanced point in the system [26]-[28].
The symmetrical component method is basically a modeling technique
that permits systematic analysis and design of three-phase systems.
The phase voltages Va, Vb and Vc are resolved into the three sets of
sequence components as shown in Figure 2.20.
- 33 -
Ib -•
Ic
—*r Zab ! /
Zbc ) /
<7
Zaa •AAAr
Zbb -AMr b'
Zee -AAAr
Figure 2.19 Three-phase line impedances.
Vao Vbo VCI
->v»,
V*
(a) Zero-sequence components.
(b) Positive-sequence (c) Negative-sequence components. components.
Figure 2.20 Sequence components of phase voltages.
The sequence components are obtained from the phase voltages by
using the linear transformation:
[Vph] = [A][V„,], (2.10)
where [VPh] and [Vseq] are the vector of phase voltages Va, Vb and Vc
and the vector of sequence components Vo, Vi and V2, respectively, and
" 1 1 1 " A = 1 a2 a (2.11)
1 a a2
where a = 1Z1200.
- 3 4 -
Now (2.8) can be expressed as
[Vph] = [Zpl][I„J. (2.12)
By using the relationship of (2.10), Equation (2.12) becomes
tv_]= ([A]'[Zph][A])[I„„] (2.13)
[v»]=[Z„,]tI,„] (2.14)
[Z„,]=[A]'tZph][A]. (2.15)
If the sequence components of the line impedances are denoted by Zo,
Zi and Z2, the [Zseq] takes the form
0
0
0
0
0
0
z,
where
Z0 = Z + 2Z_ u s m
z, = z9 = z - z 1 *-*2 s n
(2.16)
(2.17)
Thus, the sequence components of the line impedances are limited to
the three-phase balanced lines. If a fourth conductor (e.g., the neutral)
is present, it will be eliminated by Kron reduction to create a 3x3
impedance matrix. Then this matrix will be transformed into the
sequence components described above. Consequently, the variables
related to a neutral conductor and its grounding are eliminated from
the final circuit equation, and the currents and voltages associated
with the neutral conductor cannot be accessed. These are the essential
- 3 5 -
elements for the GPR, TOV and NEV analysis. Therefore, the
symmetrical components cannot represent the MGN systems. The
conventional methods that can explicitly represent the neutral
conductor and its grounding resistances are suitable.
2.3.3 Multi-phase Circuit Analysis and Tools
Historically, analytical methods were the major tools in the studies
published before powerful computers were easily accessible. In 1967, J.
Endrenyi presented an analytical method to determine the
transmission tower potentials during ground faults [29], using a multi-
grounded network. Similar grounding networks were examined for
fault current distribution in ground wires in [31]-[34], involving
exhaustive equations. In [35], Levey represented the multi-grounded
neutral by a three-terminal circuit to find the line-to-neutral fault
current for a single-phase circuit and then used this model in [36] to
compute the voltages of the multi-grounded cable. Later, in [37], he
expanded the model for a multi-phase circuit for TOV and GPR
calculations. The neutral current and GPR distribution were also
obtained by using a computer algorithm. However, these methods
failed to reveal the impact of the individual neutral parameters. In
[38], Lat presented different analytical methods to estimate the TOV in
MGN configurations, by using matrix algebra to solve the prevailing
equations for the entire system. In [39], Millard investigated the effect
of electromagnetic pulses (EMP) on the transmission line overvoltage
due to detonation of a nuclear device. Recently in 2007, an attempt to
analytically predict the overvoltage was made [40], but this study was
confined to ungrounded systems.
- 36 -
In recent years, simulation tools have been developed and become
dominant in the industry. Numerous tools and methods have been
proposed and used extensively [41]-[55]. These techniques have the
ability to represent multi-wire models and provide the opportunity to
explore the neutral current and voltages. Reference [41] discusses the
implication of using the symmetrical components in multi-phase
distribution line performance analysis. The Multi-phase Harmonic
Load Flow (MHLF) was developed in [42] to solve the harmonics and
unbalanced load flow problems. This technique also enables one to
investigate the multi-phase systems with a MGN configuration. The
neutral conductor and its multiple groundings can be explicitly
represented in the associated model. The detailed instructions are
provided in [43]. Similarly, the Electromagnetic Transient Program
(EMTP) [44] was developed to study the transients, which is
extensively used in power system transient analysis. The MHLF
technique has been integrated into the EMTP. The application of
similar multi-phase load flow techniques were examined in [45]-[46].
The effects of neutral grounding in the distribution system were
analyzed in [47]-[48] by using the EMTP approaches. The grounding
models were implemented in the EMTP to characterize the impedance
of multi-grounded neutrals on rural distribution systems in [49]-[50]
and to investigate the lightning-caused transient overvoltages in [51]-
[52]. The use of the PSpice simulation tool was proposed in [53]. While
this tool can provide the neutral currents and voltages, it cannot model
the coupling effects between the lines. Other methods, such as those in
[54]-[55], focus on improving the computational techniques.
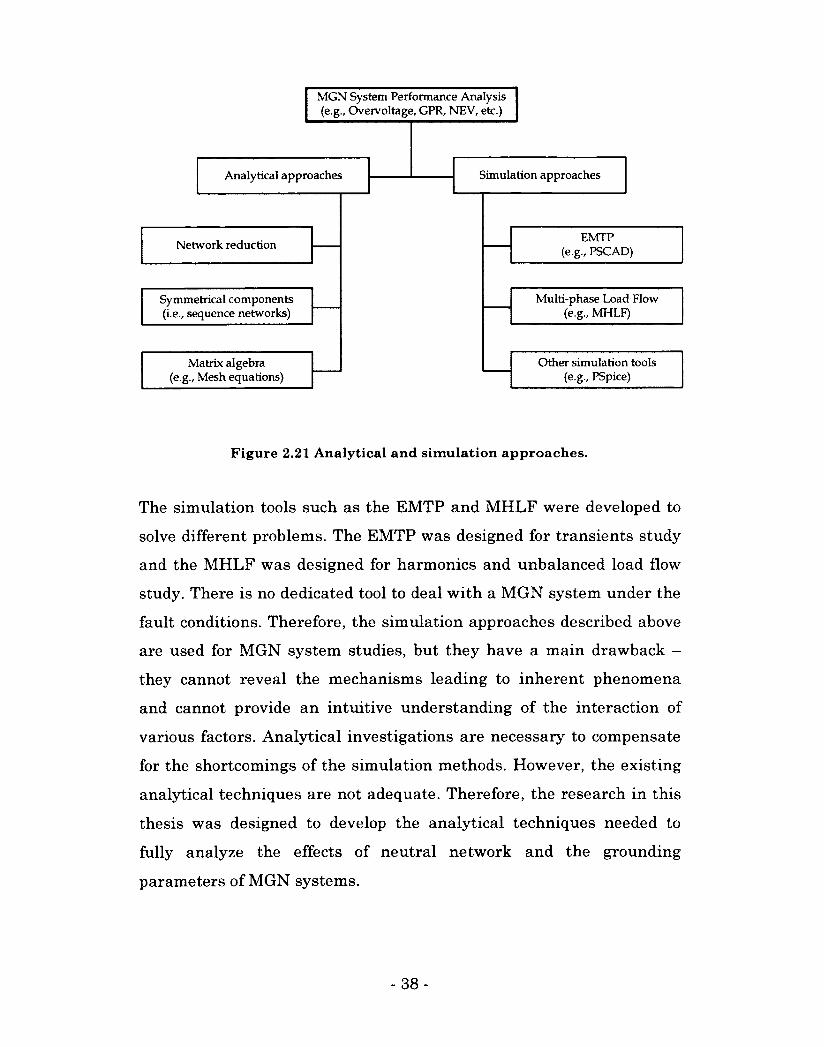
In summary, the MGN system performance analysis techniques and
tools can be arranged as shown in Figure 2.21.
- 37 -
Multi-phase Load Flow (e.g., MHLF)
EMTP (e.g., PSCAD)
Analytical approaches
Matrix algebra (e.g., Mesh equations)
Network reduction
Symmetrical components (i.e., sequence networks)
Simulation approaches
Other simulation tools (e.g., PSpice)
MGN System Performance Analysis (e.g., Overvoltage, GPR, NEV, etc.)
Figure 2.21 Analytical and simulation approaches.
The simulation tools such as the EMTP and MHLF were developed to
solve different problems. The EMTP was designed for transients study
and the MHLF was designed for harmonics and unbalanced load flow
study. There is no dedicated tool to deal with a MGN system under the
fault conditions. Therefore, the simulation approaches described above
are used for MGN system studies, but they have a main drawback -
they cannot reveal the mechanisms leading to inherent phenomena
and cannot provide an intuitive understanding of the interaction of
various factors. Analytical investigations are necessary to compensate
for the shortcomings of the simulation methods. However, the existing
analytical techniques are not adequate. Therefore, the research in this
thesis was designed to develop the analytical techniques needed to
fully analyze the effects of neutral network and the grounding
parameters of MGN systems.
- 3 8 -
2.3.4 Secondary Circuit Analysis
The above-mentioned methods and tools are applicable to the primary
system analysis, but they are not applicable to secondary circuit,
especially in the stray voltage assessments, because the stray voltage
on the secondary side results from both the primary and secondary
circuit conditions.
The stray voltage problems are often considered to be the side-effects of
MGN systems. The stray voltage is a small voltage, not exceeding 10V
and, thus, is not considered to be dangerous to humans [6],[8],[56]-[59].
On the other hand, cattle can be sensitive to small voltages, even IV or
less [60]-[62]. After stray voltage was initially noticed in dairy farms, it
was explored extensively by engineers and researchers wishing to
improve farm productivity [63]-[66]. The interest in stray voltage was
limited to the farm industry for many years, but in the present context,
stray voltage problems involve not only animals, but also the public.
Cases of electric shocks due to stray voltages in public facilities such as
showers and swimming pools [8] have been reported. In fact, many
jurisdictions in the US and Canada are mandating rules and
regulations in an attempt to limit stray voltage levels [67]-[68].
Experiences indicate that one of the major causes of stray voltage is
the primary neutral-to-earth voltage (NEV) resulting from four-wire
distribution systems. The four-wire MGN systems continue to remain
dominant in North America. The NEV is of concern to utilities,
regulators, and the public [71], and investigations are under way in
order to help mitigate the stray voltage problems. In [72], the NEV
originating from a nearby transmission lines by electromagnetic
- 39 -
induction was studied. The way that harmonics cause stray voltage
through an elevated NEV was discussed in [71], [73]-[76]. Other factors
affecting the NEV, such as load balancing and grounding resistances,
are presented in [77]-[78]. The primary NEV was the main focus of the
previous studies. It is well understood that stray voltage results from
both the utility system (off-site) and customer facility (on-site) [69].
Available stray voltage testing protocols [68]-[70] are based on field
measurement. Unfortunately, analytical methods for such studies are
virtually non-existent, and the question "To what extent does the
primary NEV cause stray voltage in customer facilities?" remains
unanswered analytically. Therefore, this present research was
designed to establish an analytical assessment method to quantify the
relative contributions from the off-site and on-site sources of stray
voltages.
2.4 Summary
This chapter reviewed the characteristics of MGN systems and the
progress on the techniques and methods for analyzing them. The
fundamentals of distribution system grounding, including neutral
grounding, substation grounding and transformer grounding, were
presented. Other characteristics such as coupling and neutral current
harmonics were discussed. This chapter also presented the
distributions of the voltage and current in the neutral conductor. As a
result, the representative system configurations have been identified
as the full-neutral system and islanded-neutral system.
The techniques and methods associated with the MGN system
performance evaluation available in the literature were reviewed. The
- 40 -
symmetrical-components-based techniques and simulation methods
were found to be dominant and preferred in the power system
community. However, the symmetrical-components-based methods are
not applicable in MGN systems as these methods do not properly
consider the neutral network. On the other hand, the simulation tools
cannot provide an intuitive understanding of the effect of the system
parameters, which lead to various phenomena in the MGN systems.
The lack of suitable analytical techniques has been the main obstacle
in developing a full understanding of MGN system performance.
The NEV transfer from the MGN feeder's neutral to the secondary
system is a primary concern of the stray voltage problems. However,
virtually no methods are available for assessing the NEV transfer.
- 41 -
3. Analytical Approaches to Ground Potential Rise
Assessment
An analytical model for ground potential rise (GPR) assessment is
proposed. Analytical studies of the GPR phenomena associated with
MGN configurations are conducted. This chapter also reveals the
mechanisms leading to the phenomena and their affecting factors.
Approximate formulae are derived to quantify the impacts of various
factors. Simulation is performed to compare its results with the
analytical results. The effects of different parameters associated with
the MGN neutral are presented through sensitivity studies. The
application of proposed technique is demonstrated by using examples
of underbuilt distribution system and the aerial-lift vehicle working
under live power lines.
3.1 Ground Potential Rise of MGN Neutral
Consider a system like that represented in Figure 3.1 where a LG fault
in a MGN feeder drives a large amount of current in the phase wire,
the neutral wire, and the substation grounding resistance. The neutral
current dissipates into the earth through the grounding resistances,
leading to a large GPR in each grounded node of the neutral. The GPR
of any grounded node is the voltage potential of that node measured
with respect to the remote earth.
- 42 -
Aggregate loads
•A B C
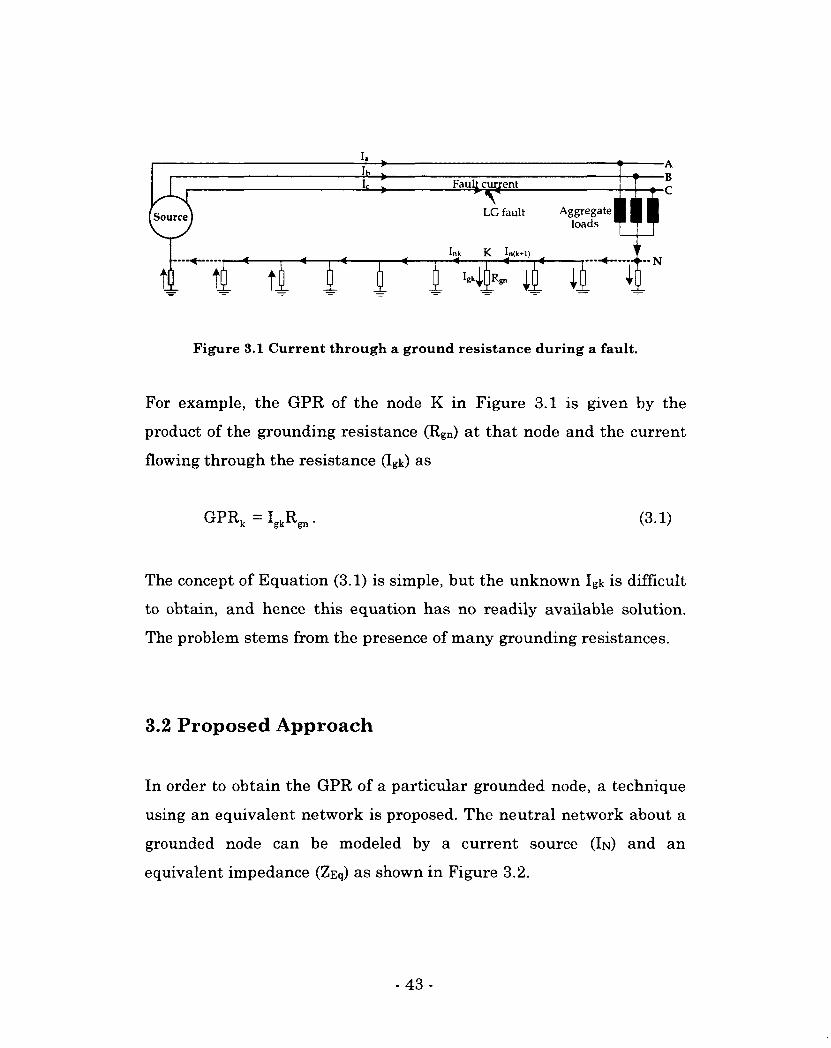
Figure 3.1 Current through a ground resistance during a fault.
For example, the GPR of the node K in Figure 3.1 is given by the
product of the grounding resistance (Rgn) at that node and the current
flowing through the resistance (Igk) as
The concept of Equation (3.1) is simple, but the unknown Igk is difficult
to obtain, and hence this equation has no readily available solution.
The problem stems from the presence of many grounding resistances.
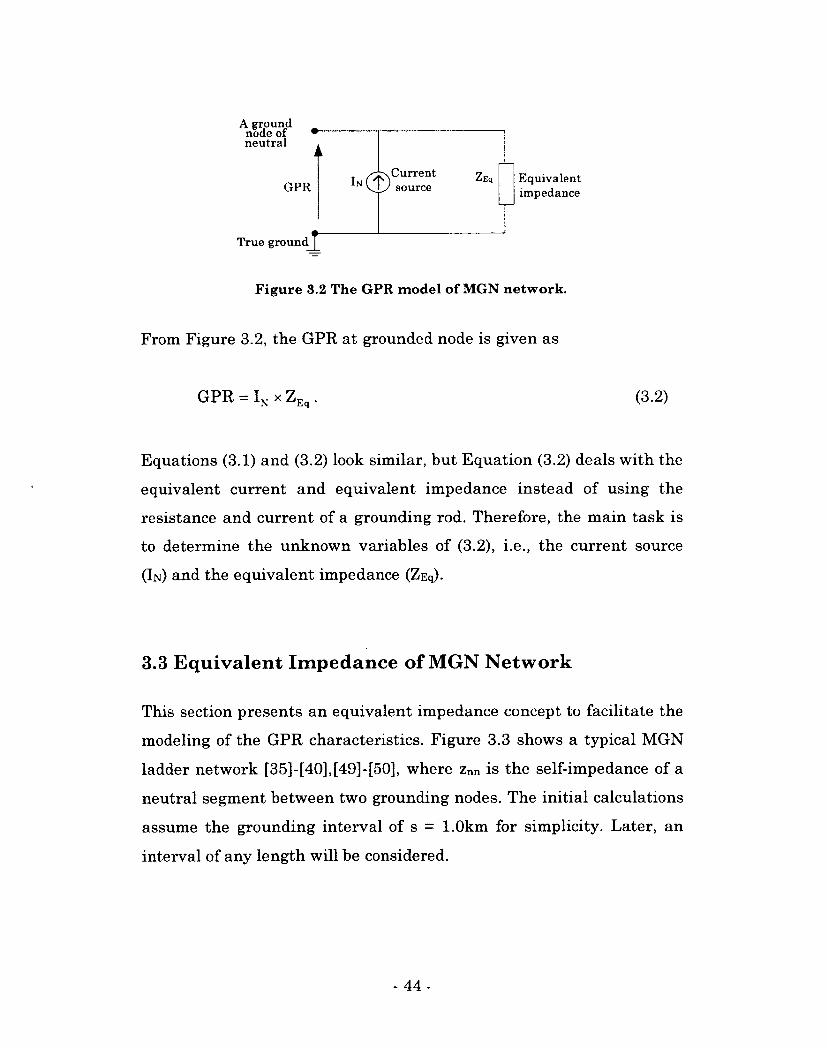
3.2 Proposed Approach
In order to obtain the GPR of a particular grounded node, a technique
using an equivalent network is proposed. The neutral network about a
grounded node can be modeled by a current source (IN) and an
equivalent impedance (ZEq) as shown in Figure 3.2.
GPRk Igk^gn • (3.1)
- 43 -
A ground node of • neutral
A
GPR
True ground
Current source
ZEq Equivalent impedance
Figure 3.2 The GPR model of MGN network.
From Figure 3.2, the GPR at grounded node is given as
GPR = IN x ZEq . (3.2)
Equations (3.1) and (3.2) look similar, but Equation (3.2) deals with the
equivalent current and equivalent impedance instead of using the
resistance and current of a grounding rod. Therefore, the main task is
to determine the unknown variables of (3.2), i.e., the current source
(In) and the equivalent impedance (zeq).
3.3 Equivalent Impedance of MGN Network
This section presents an equivalent impedance concept to facilitate the
modeling of the GPR characteristics. Figure 3.3 shows a typical MGN
ladder network [35]-[40],[49]-[50], where znn is the self-impedance of a
neutral segment between two grounding nodes. The initial calculations
assume the grounding interval of s = 1.0km for simplicity. Later, an
interval of any length will be considered.
- 44 -
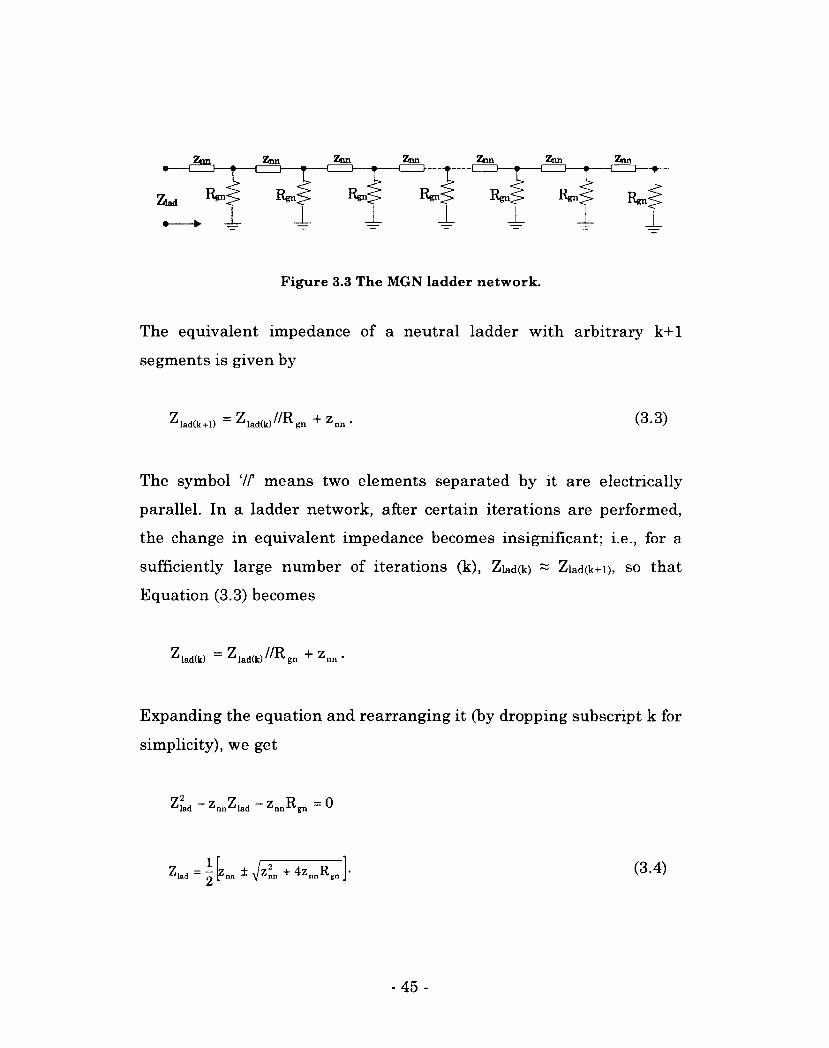
Zlnd Rgn^> Rgn^> Rgn<I R™
— ± -L ± I 1 1 ±
Figure 3.3 The MGN ladder network.
The equivalent impedance of a neutral ladder with arbitrary k+1
segments is given by
The symbol 'IT means two elements separated by it are electrically
parallel. In a ladder network, after certain iterations are performed,
the change in equivalent impedance becomes insignificant; i.e., for a
sufficiently large number of iterations (k), Ziad(k) ~ Ziad(k+i>, so that
Equation (3.3) becomes
^ lad(k) ~~ ^ lad(k) gn ^nn '
Expanding the equation and rearranging it (by dropping subscript k for
simplicity), we get
Z lad(k+l) lad(k) (3.3)
^lad Znn^lad Znn^gn ~~ ^
(3.4)
-45-

The positive root of Ziad is the equivalent impedance of the ladder
network. For an arbitrary grounding interval (s), znn should be
multiplied by s. The resulting equation is
For a small znn and/or large Rgn, the isolated znn terms can be omitted.
Then (3.5) can be further simplified as
Equation (3.6) suggests that equivalent impedance of an MGN ladder
is proportional to the square-root of the
• impedance of the neutral wire (Q/km).
• grounding resistance (Q).
• grounding interval (km).
The effect of each of these factors was investigated by using the
sensitivity studies. The effect of grounding resistance is shown in
Figure 3.4. The effect of grounding interval and that of neutral
conductor are shown in Figures 3.5-3.6. Conductors of comparable sizes
have a similar reactance, but their resistances vary, so the different
resistance values were considered for the sensitivity studies. Among
the selected five conductors, the resistance of the smallest conductor
(the 6.7mm Flounder) is the highest, at 1.335£2/km, and the thickest
conductor (the 11.7mm Cusk) has the smallest resistance, 0.3379Q/km.
The resistances of the other conductors are between these two values.
In this study, the grounding resistance and grounding interval were
held constant at 70, and 500m, respectively.
(3.5)
(3.6)
- 46 -
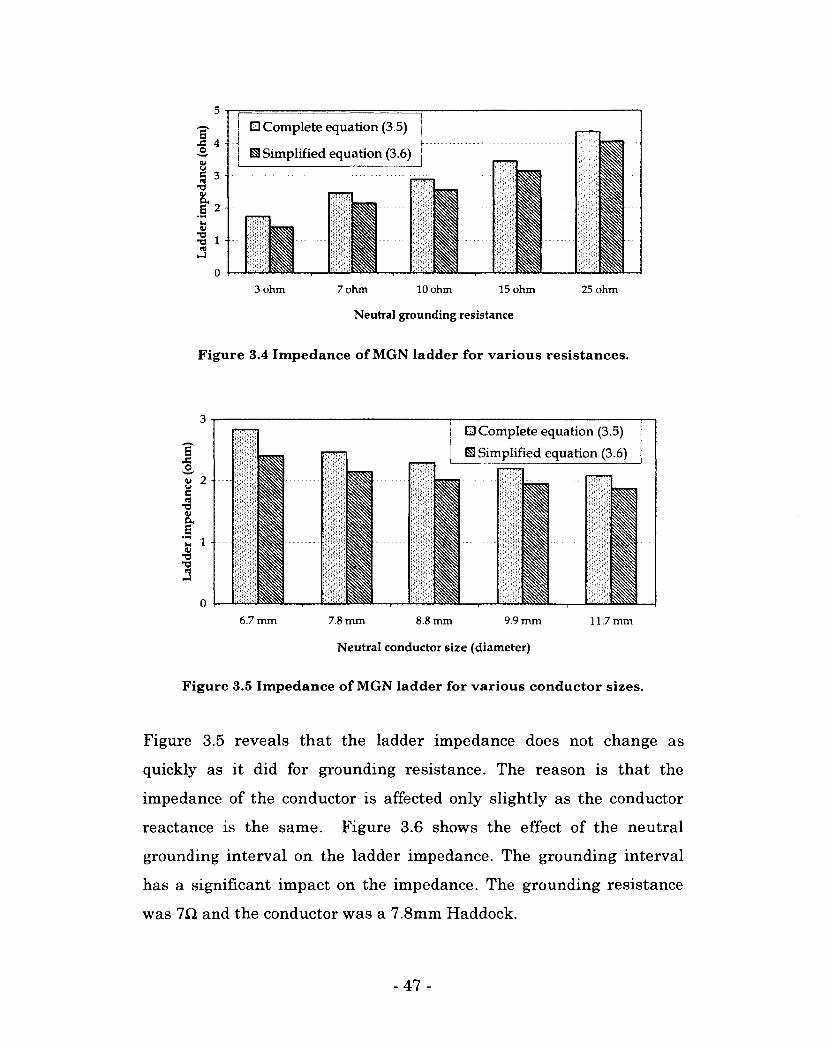
ED Complete equation (3.5)
• Simplified equation (3.6)
3 ohm 7 ohm 10 ohm 15 ohm 25 ohm
Neutral grounding resistance
Figure 3.4 Impedance of MGN ladder for various resistances.
GO Complete equation (3.5)
El Simplified equation (3.6)
6.7 mm 7.8 nun 8.8 mm 9.9 mm
Neutral conductor size (diameter)
11.7 mm
Figure 3.5 Impedance of MGN ladder for various conductor sizes.
Figure 3.5 reveals that the ladder impedance does not change as
quickly as it did for grounding resistance. The reason is that the
impedance of the conductor is affected only slightly as the conductor
reactance is the same. Figure 3.6 shows the effect of the neutral
grounding interval on the ladder impedance. The grounding interval
has a significant impact on the impedance. The grounding resistance
was 7Q and the conductor was a 7.8mm Haddock.
-47 -
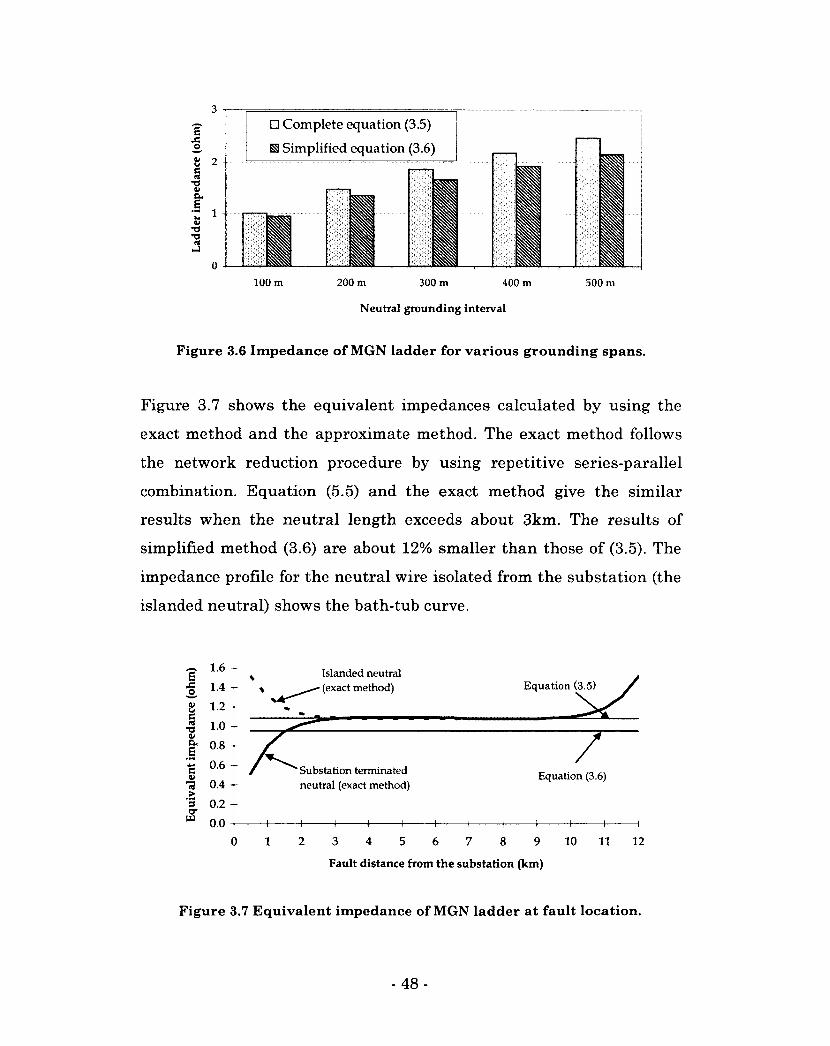
s
V o u z C <« T3 4> a s <u
T3 H3 nJ
1 -
• Complete equation (3.5)
^ Simplified equation (3.6)
100 m 200 m 300 m 400 m
Neutral grounding interval
500 m
Figure 3.6 Impedance of MGN ladder for various grounding spans.
Figure 3.7 shows the equivalent impedances calculated by using the
exact method and the approximate method. The exact method follows
the network reduction procedure by using repetitive series-parallel
combination. Equation (5.5) and the exact method give the similar
results when the neutral length exceeds about 3km. The results of
simplified method (3.6) are about 12% smaller than those of (3.5). The
impedance profile for the neutral wire isolated from the substation (the
islanded neutral) shows the bath-tub curve.
0.8 --
0.6 -
Islanded neutral (exact method)
Substation terminated neutral (exact method)
-+- -4-
Equation (3. (3.5) /
/ Equation (3.6)
-+-
3 4 5 6 7 8 9
Fault distance from the substation (km)
10 11 12
Figure 3.7 Equivalent impedance of MGN ladder at fault location.
- 48 -
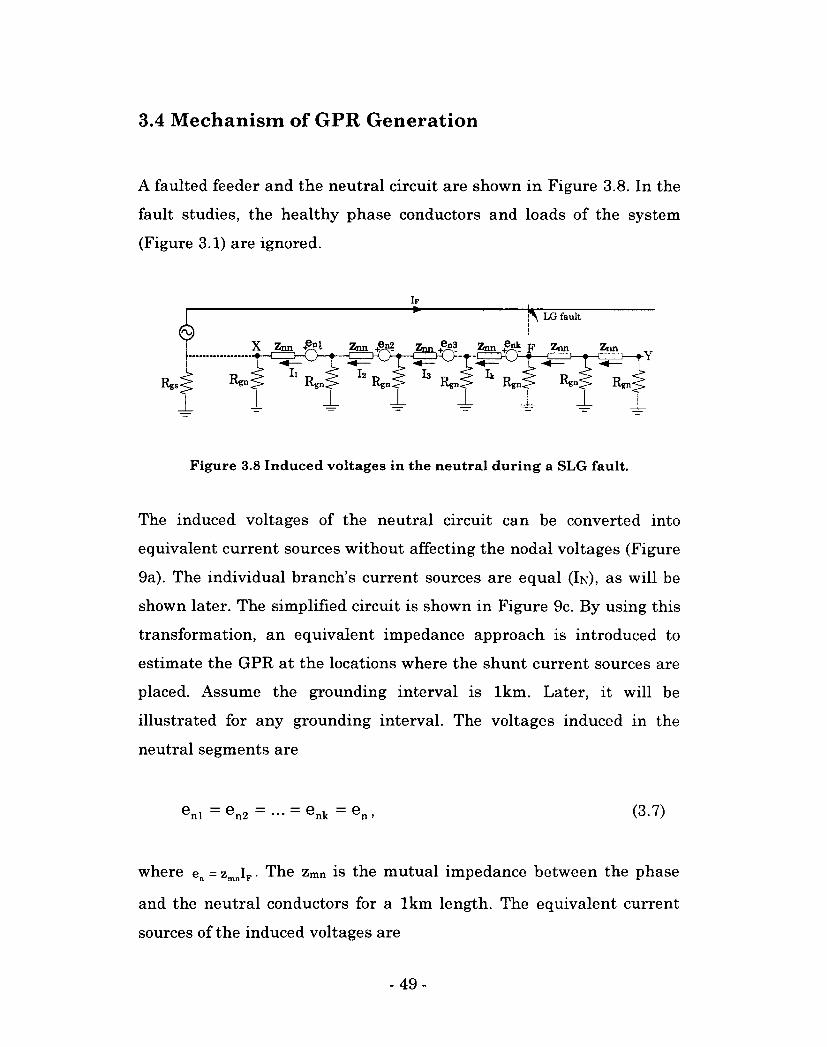
3.4 Mechanism of GPR Generation
A faulted feeder and the neutral circuit are shown in Figure 3.8. In the
fault studies, the healthy phase conductors and loads of the system
(Figure 3.1) are ignored.
IF
Figure 3.8 Induced voltages in the neutral during a SLG fault.
The induced voltages of the neutral circuit can be converted into
equivalent current sources without affecting the nodal voltages (Figure
9a). The individual branch's current sources are equal (IN), as will be
shown later. The simplified circuit is shown in Figure 9c. By using this
transformation, an equivalent impedance approach is introduced to
estimate the GPR at the locations where the shunt current sources are
placed. Assume the grounding interval is 1km. Later, it will be
illustrated for any grounding interval. The voltages induced in the
neutral segments are
enl = en2 = = enk = en > (3.7)
where en = zmnIF • The zmn is the mutual impedance between the phase
and the neutral conductors for a 1km length. The equivalent current
sources of the induced voltages are
-49-
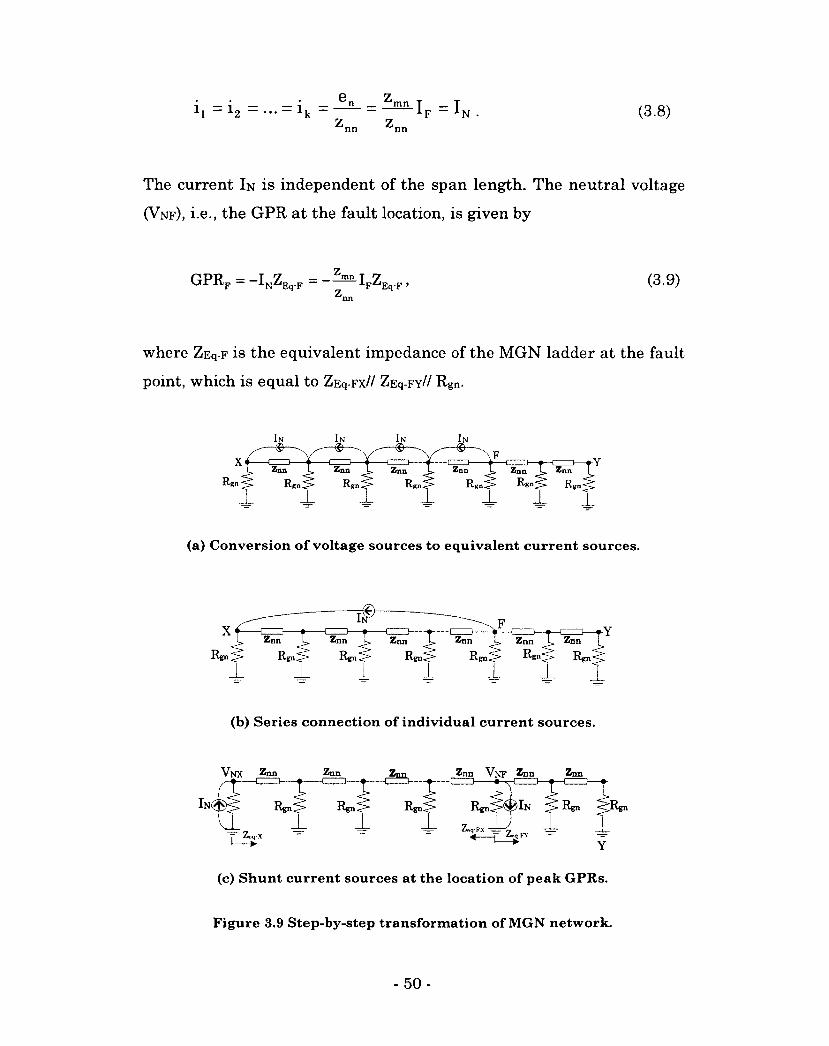
ij = i2 = ... = ik = = -^as-Ip = IN . (3.8) Znn Znn
The current IN is independent of the span length. The neutral voltage
(VNF), i.e., the GPR at the fault location, is given by
GPRF = -INZEqF = -^MFZEq.F, (3.9) Z nn
where ZEq-F is the equivalent impedance of the MGN ladder at the fault
point, which is equal to ZEq-Fx// Zeq-fy// Rgn.
Znn Znn Znn Znn Znn Znn
'gn; •gn
(a) Conversion of voltage sources to equivalent current sources.
•—i 1 > Znn Znn Znn Znn Znn
Rgn
(b) Series connection of individual current sources.
(c) Shunt current sources at the location of peak GPRs.
Figure 3.9 Step-by-step transformation of MGN network.
- 50 -
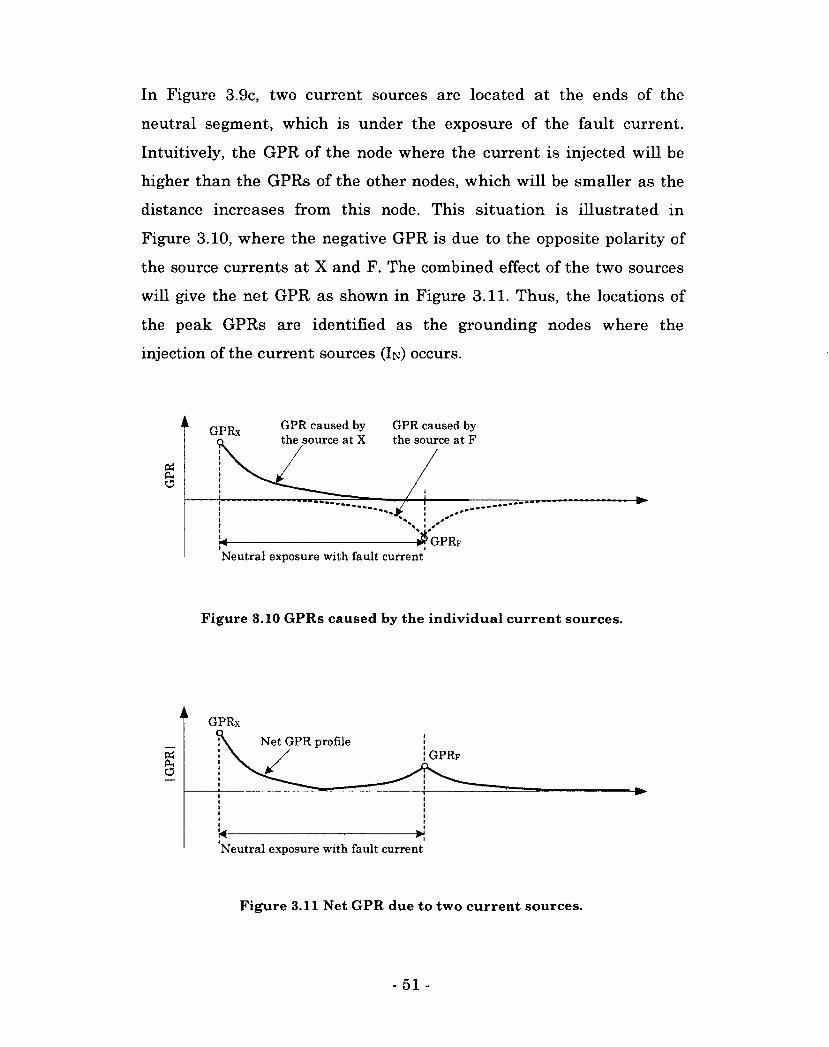
In Figure 3.9c, two current sources are located at the ends of the
neutral segment, which is under the exposure of the fault current.
Intuitively, the GPR of the node where the current is injected will be
higher than the GPRs of the other nodes, which will be smaller as the
distance increases from this node. This situation is illustrated in
Figure 3.10, where the negative GPR is due to the opposite polarity of
the source currents at X and F. The combined effect of the two sources
will give the net GPR as shown in Figure 3.11. Thus, the locations of
the peak GPRs are identified as the grounding nodes where the
injection of the current sources (IN) occurs.
GPR caused by GPR caused by the source at X the source at F
GPRx
•
Neutral exposure with fault current
Figure 3.10 GPRs caused by the individual current sources.
GPRx
Net GPR profile GPRF
Neutral exposure with fault current
Figure 3.11 Net GPR due to two current sources.
- 51 -
3.4.1 Neutral Terminated in the Substation
As the neutral wire is terminated in the substation, Rgn at X will be
replaced by Rgs. Since Rgs is very small, VNX (i.e., GPRx) can be
neglected. In this case, the GPR at point F is the largest among all the
grounded points. The ladder impedance at the fault location is
^Eq-FX — ^Eq-FY — V2nn^gnS •
Therefore,
(3'10)
By using (3.9), the GPR at location F is given by
GPRF = -I^BBLI Jz R a • (3.11) » n „ f V nn gn
nn
The advantage of this equation is that the GPR can be estimated by
using the fault current and MGN parameters. If the fault is located
downstream of point Y, the maximum GPR will occur at the far end of
the neutral (i.e., point Y). Then
^Eq-Y = -y/ZnnRgnS
GPRY=-?mIF^J^J. (3.12) z nn
Note that the GPRY for the fault that occurs downstream of Y is two
times larger than the GPRF for the fault that occurs upstream of Y,
provided that the fault currents are equal.
- 52 -
3.4.2 Neutral Isolated from the Substation
The neutral wire can be isolated from the substation grid. When a fault
occurs between X and Y (Figure 3.8), the GPR at the fault location will
not be affected (see Equation 3.11). However, the maximum GPR will
be shifted at a different location, i.e., at X. The equivalent impedance
at X is ZEq-x = Ziad, and the GPRx is
On the other hand, the GPRx and GPRY will be equal when a fault
occurs downstream of node Y.
From this investigation, we conclude that the GPR is the function of
the following parameters:
• Mutual-impedance between the phase and neutral wires.
• Magnitude of fault current (IF).
• Length of grounding span (s).
• Size of the neutral conductor (measured as znn).
• Grounding resistance (Rgn).
Among these variables, the last three are related to the neutral
conductor and its grounding parameters. The grounding span (given in
km) has a small impact on the GPR. In summary, the analysis reveals
that the mechanism of neutral GPR generation is as follows:
• The fault current creates two shunt current sources. These
currents are produced through the mutual coupling between the
phase and the neutral conductors.
• The shunt current sources are connected at the ends of the fault
(3.13)
- 53 -
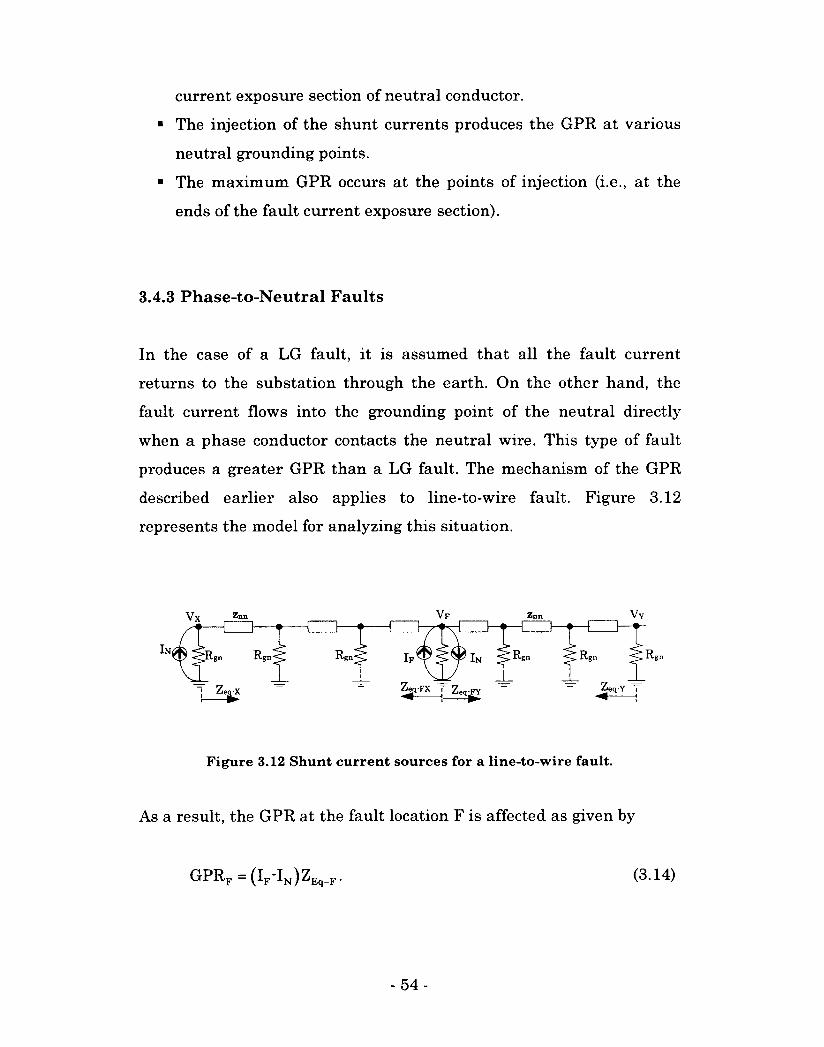
current exposure section of neutral conductor.
• The injection of the shunt currents produces the GPR at various
neutral grounding points.
• The maximum GPR occurs at the points of injection (i.e., at the
ends of the fault current exposure section).
3.4.3 Phase-to-Neutral Faults
In the case of a LG fault, it is assumed that all the fault current
returns to the substation through the earth. On the other hand, the
fault current flows into the grounding point of the neutral directly
when a phase conductor contacts the neutral wire. This type of fault
produces a greater GPR than a LG fault. The mechanism of the GPR
described earlier also applies to line-to-wire fault. Figure 3.12
represents the model for analyzing this situation.
As a result, the GPR at the fault location F is affected as given by
Figure 3.12 Shunt current sources for a line-to-wire fault.
GPRF - (iF^N^Eq-F • (3.14)
- 54 -

The current involved in (3.9) is IN only, but it is modified in (3.14) as
(IF-IN) due to the short circuit of the phase and neutral conductors. The
GPR of the node X will be the same as long as the fault occurs far
enough away from this node.
3.5 Analytical and Simulation Results
In this study, a 25kV system (Figure 3.1) with a 12km feeder, 7Q
neutral grounding resistance (Rgn), 500m grounding interval and 0.15H
substation grounding resistance was used. This system consists of four
ACSR conductors: three 3/0-Pigeon (12.75mm) for the phase wires and
a #2-Haddock (7.8mm) for the neutral wire. Table 3.1 shows the
computed impedance data. The self-impedances and mutual-
impedances of the lines were calculated by using the Equations (2.5)
and (2.7) provided in Chapter 2. The calculation of the substation
source impedances is shown in Appendix B.
Table 3.1 MGN system impedance data.
Component Self-impedance Mutual-impedance
Substation source (Q) 0.0721+j2.8858 -0.0018+j0.666
Phase conductors (Q/km) 0.396+j0.912 0.058+j0.493 (phase-to-phase)
Neutral conductor (ft /km) 0.911+jO.946 0.058+j0.473 (phase-to-neutral)
The GPR profiles of the MGN neutral are shown in Figure 3.13. The
profiles for the case of neutral wire terminated at the substation have
their maximum values at the fault locations. On the other hand, the
islanded neutral configuration exhibits two peaks in its GPR profiles -
one at the fault location and the other at the source side end of the
- 55-
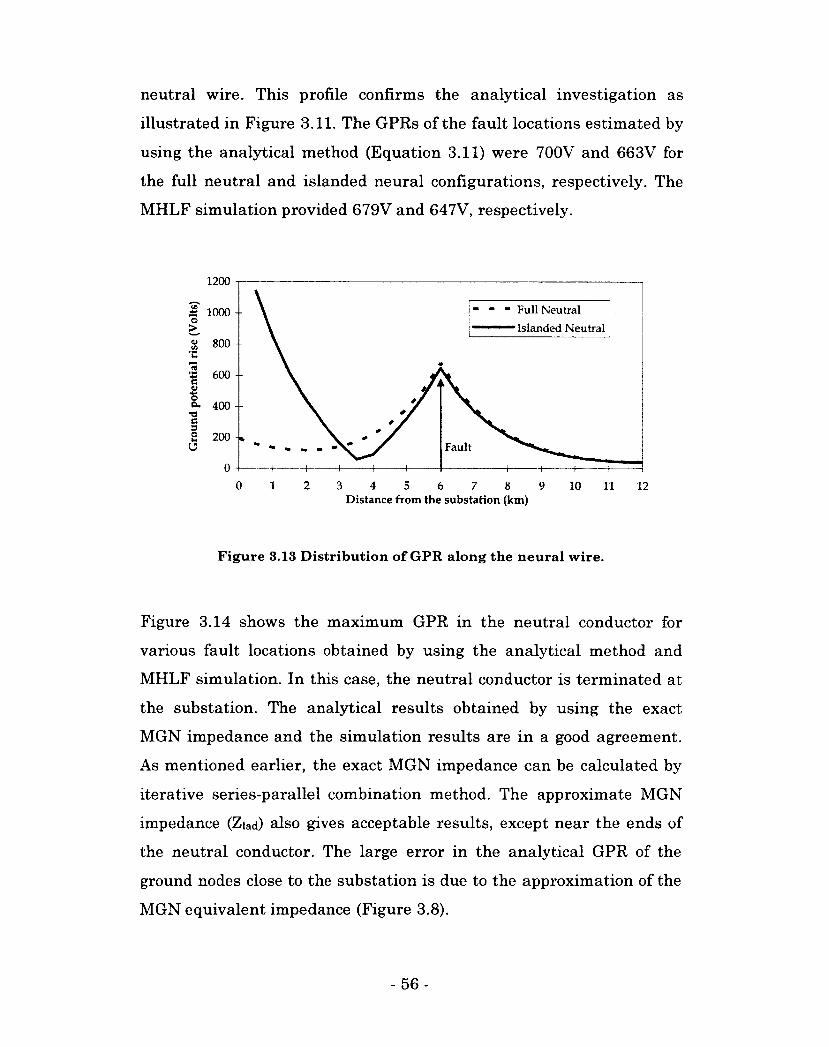
neutral wire. This profile confirms the analytical investigation as
illustrated in Figure 3.11. The GPRs of the fault locations estimated by
using the analytical method (Equation 3.11) were 700V and 663V for
the full neutral and islanded neural configurations, respectively. The
MHLF simulation provided 679V and 647V, respectively.
1200
Full Neutral
Islanded Neutral 1000 --
600 --
a- 400
200 Fault
0 1 2 3 4 5 6 7 8 9 10 12 11 Distance from the substation (km)
Figure 3.13 Distribution of GPR along the neural wire.
Figure 3.14 shows the maximum GPR in the neutral conductor for
various fault locations obtained by using the analytical method and
MHLF simulation. In this case, the neutral conductor is terminated at
the substation. The analytical results obtained by using the exact
MGN impedance and the simulation results are in a good agreement.
As mentioned earlier, the exact MGN impedance can be calculated by
iterative series-parallel combination method. The approximate MGN
impedance (Ziad) also gives acceptable results, except near the ends of
the neutral conductor. The large error in the analytical GPR of the
ground nodes close to the substation is due to the approximation of the
MGN equivalent impedance (Figure 3.8).
- 56 -
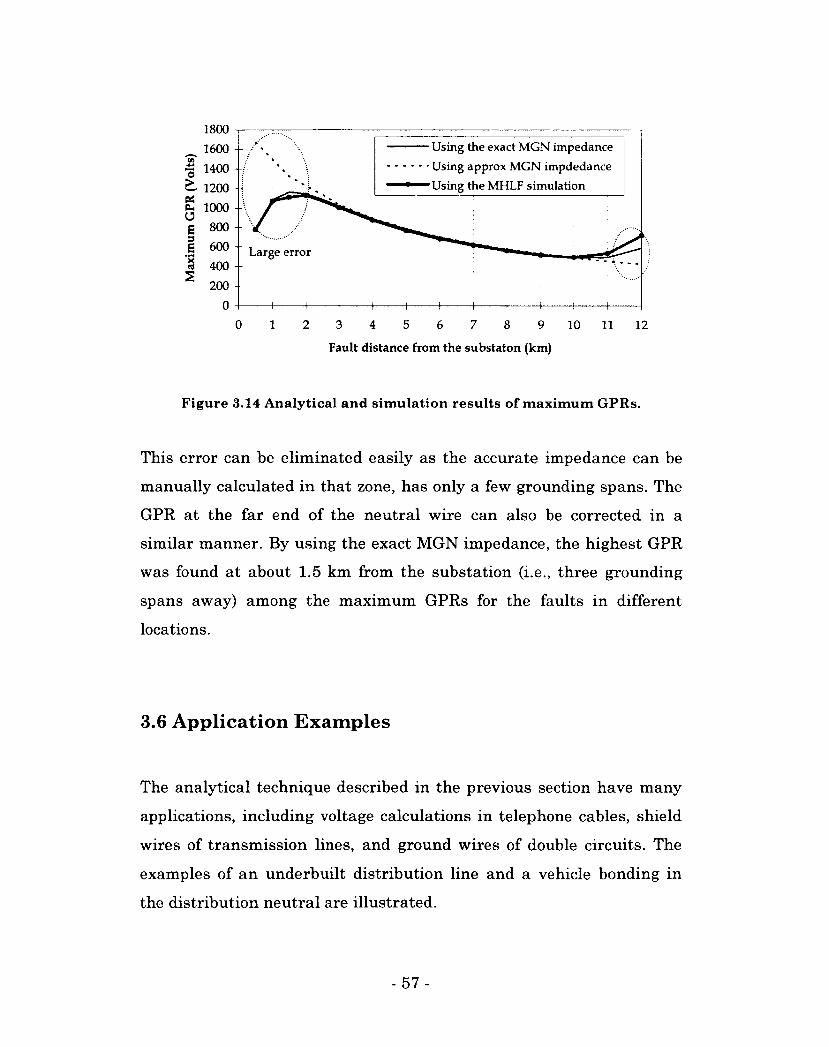
1800 ~i—
1600 •• / Using the exact MGN impedance
Using approx MGN impdedance
Using; the MHLF simulation
* 1400 --
1200
1000 --U g 800 -
I 600 --
J 400 -S
200 --
0 -0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2
Fault distance from the substaton (km)
Figure 3.14 Analytical and simulation results of maximum GPRs.
This error can be eliminated easily as the accurate impedance can be
manually calculated in that zone, has only a few grounding spans. The
GPR at the far end of the neutral wire can also be corrected in a
similar manner. By using the exact MGN impedance, the highest GPR
was found at about 1.5 km from the substation (i.e., three grounding
spans away) among the maximum GPRs for the faults in different
locations.
3.6 Application Examples
The analytical technique described in the previous section have many
applications, including voltage calculations in telephone cables, shield
wires of transmission lines, and ground wires of double circuits. The
examples of an underbuilt distribution line and a vehicle bonding in
the distribution neutral are illustrated.
- 57 -
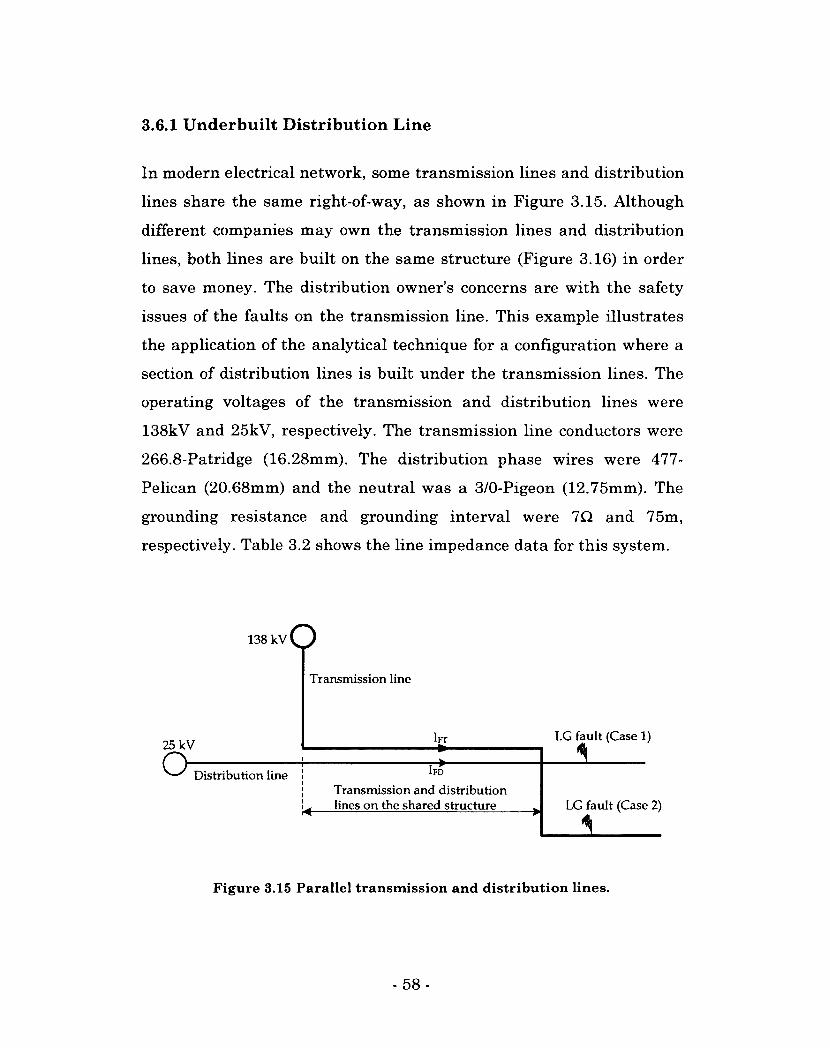
3.6.1 Underbuilt Distribution Line
In modern electrical network, some transmission lines and distribution
lines share the same right-of-way, as shown in Figure 3.15. Although
different companies may own the transmission lines and distribution
lines, both lines are built on the same structure (Figure 3.16) in order
to save money. The distribution owner's concerns are with the safety
issues of the faults on the transmission line. This example illustrates
the application of the analytical technique for a configuration where a
section of distribution lines is built under the transmission lines. The
operating voltages of the transmission and distribution lines were
138kV and 25kV, respectively. The transmission line conductors were
266.8-Patridge (16.28mm). The distribution phase wires were 477-
Pelican (20.68mm) and the neutral was a 3/0-Pigeon (12.75mm). The
grounding resistance and grounding interval were 7Q. and 75m,
respectively. Table 3.2 shows the line impedance data for this system.
Transmission line
25 kV I FT LG fault (Case 1)
i o Distribution line Transmission and distribution lines on the shared structure LG fault (Case 2)
Figure 3.15 Parallel transmission and distribution lines.
- 58 -
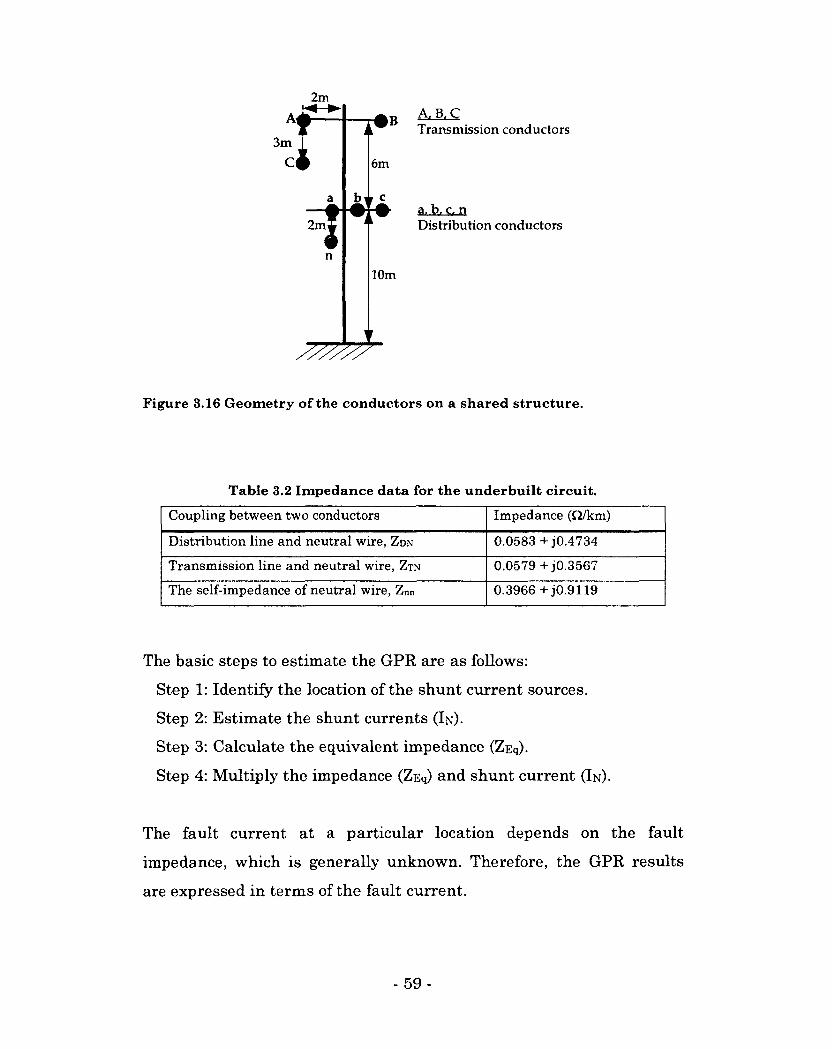
2m Ai
3m
C
f i*B
i
2m.
10m
A. B.C Transmission conductors
a, b, c. n Distribution conductors
Figure 3.16 Geometry of the conductors on a shared structure.
Table 3.2 Impedance data for the underbuilt circuit.
Coupling between two conductors Impedance (T2/km)
Distribution line and neutral wire, ZDN 0.0583 + j0.4734
Transmission line and neutral wire, ZTN 0.0579+j0.3567
The self-impedance of neutral wire, Znn 0.3966+j0.9119
The basic steps to estimate the GPR are as follows:
Step 1: Identify the location of the shunt current sources.
Step 2: Estimate the shunt currents (IN).
Step 3: Calculate the equivalent impedance (ZEq).
Step 4: Multiply the impedance (ZEq) and shunt current (IN).
The fault current at a particular location depends on the fault
impedance, which is generally unknown. Therefore, the GPR results
are expressed in terms of the fault current.
- 59 -
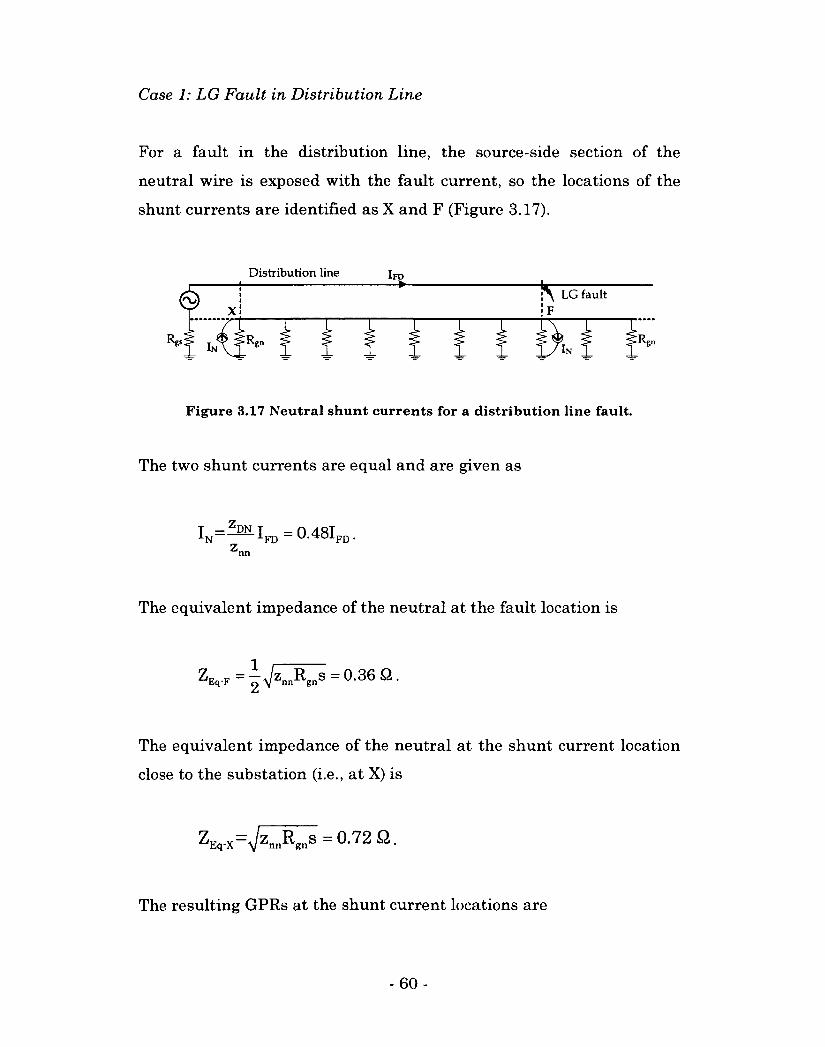
Case 1: LG Fault in Distribution Line
For a fault in the distribution line, the source-side section of the
neutral wire is exposed with the fault current, so the locations of the
shunt currents are identified as X and F (Figure 3.17).
Distribution line Ipp
Figure 3.17 Neutral shunt currents for a distribution line fault.
The two shunt currents are equal and are given as
IN=SALIRO=0.48IPD. Znn
The equivalent impedance of the neutral at the fault location is
ZF„.F = -JznnRras = 0.36 Q. "Q * 2 * g
The equivalent impedance of the neutral at the shunt current location
close to the substation (i.e., at X) is
ZFnX=\/Zm,R<mS = 0-72 Q . bq-A yj nn gn
The resulting GPRs at the shunt current locations are
-60-
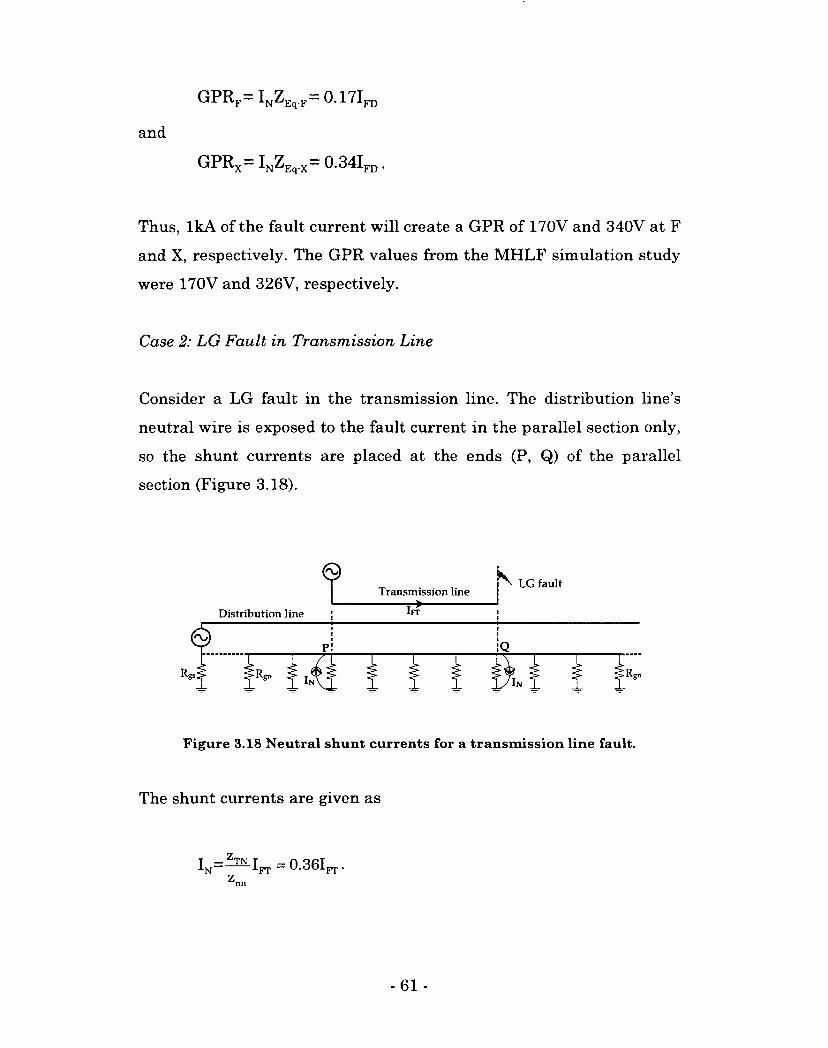
GPRF- lAqF- 0.17IFD
and
GPRX= INZEqX= 0.34Ifd
Thus, IkA of the fault current will create a GPR of 170V and 340V at F
and X, respectively. The GPR values from the MHLF simulation study
were 170V and 326V, respectively.
Case 2: LG Fault in Transmission Line
Consider a LG fault in the transmission line. The distribution line's
neutral wire is exposed to the fault current in the parallel section only,
so the shunt currents are placed at the ends (P, Q) of the parallel
section (Figure 3.18).
Transmission line
Distribution line
Figure 3.18 Neutral shunt currents for a transmission line fault.
The shunt currents are given as
I N =—I fr=0-36IFT. z„„
- 61 -
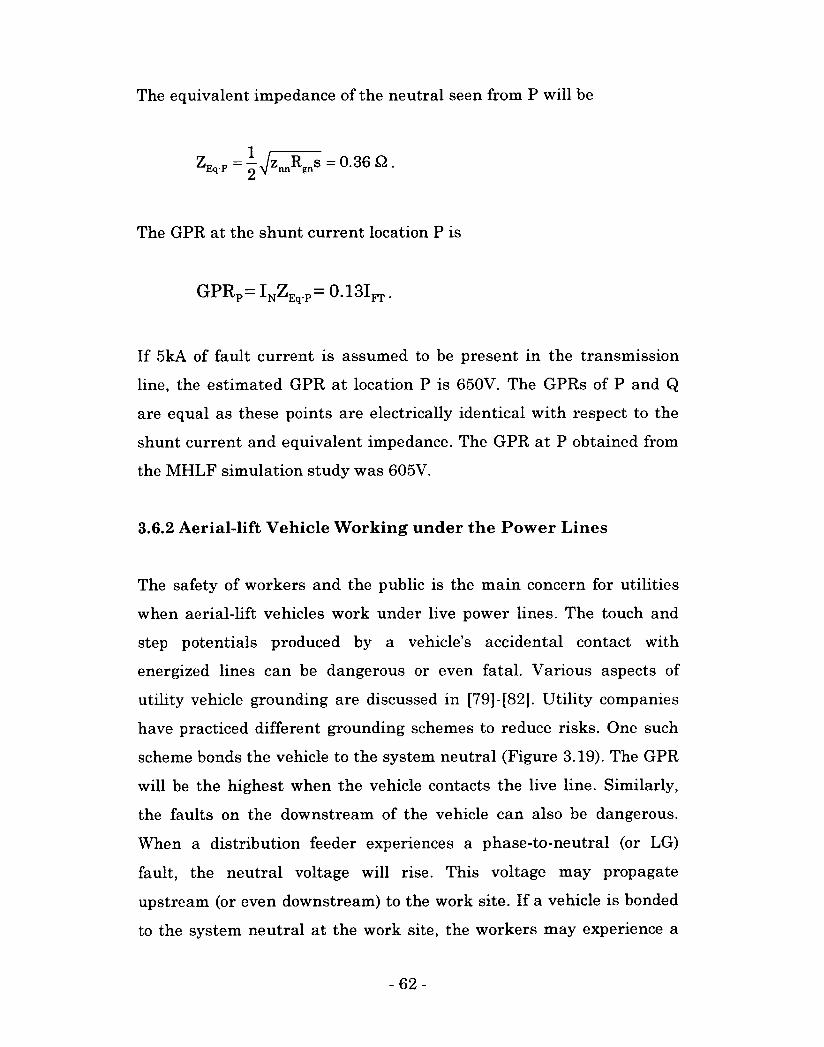
The equivalent impedance of the neutral seen from P will be
ZEq P = |>/Zn„RgnS = 0 36 Q •
The GPR at the shunt current location P is
GPRp= INZEq.P= 0.131pp.
If 5kA of fault current is assumed to be present in the transmission
line, the estimated GPR at location P is 650V. The GPRs of P and Q
are equal as these points are electrically identical with respect to the
shunt current and equivalent impedance. The GPR at P obtained from
the MHLF simulation study was 605V.
3.6.2 Aerial-lift Vehicle Working under the Power Lines
The safety of workers and the public is the main concern for utilities
when aerial-lift vehicles work under live power lines. The touch and
step potentials produced by a vehicle's accidental contact with
energized lines can be dangerous or even fatal. Various aspects of
utility vehicle grounding are discussed in [79]-[82]. Utility companies
have practiced different grounding schemes to reduce risks. One such
scheme bonds the vehicle to the system neutral (Figure 3.19). The GPR
will be the highest when the vehicle contacts the live line. Similarly,
the faults on the downstream of the vehicle can also be dangerous.
When a distribution feeder experiences a phase-to-neutral (or LG)
fault, the neutral voltage will rise. This voltage may propagate
upstream (or even downstream) to the work site. If a vehicle is bonded
to the system neutral at the work site, the workers may experience a
-62-
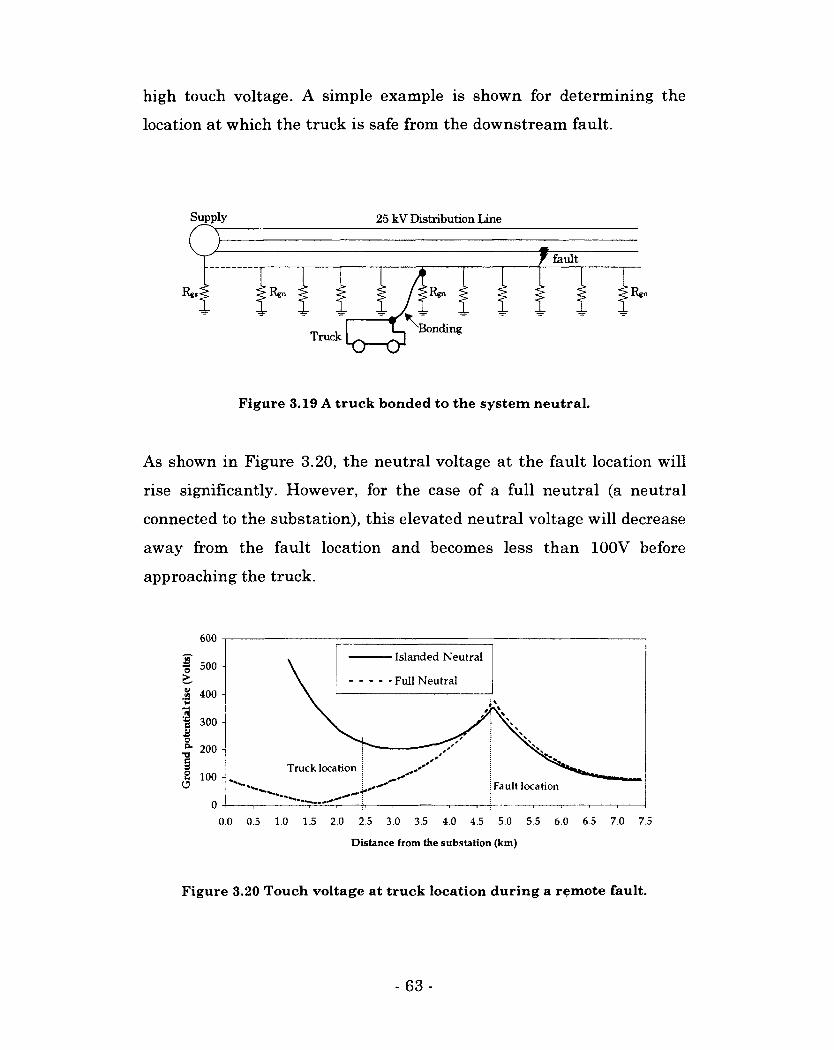
high touch voltage. A simple example is shown for determining the
location at which the truck is safe from the downstream fault.
Supply 25 kV Distribution Line
y fault
"Bonding Truck
Figure 3.19 A truck bonded to the system neutral.
As shown in Figure 3.20, the neutral voltage at the fault location will
rise significantly. However, for the case of a full neutral (a neutral
connected to the substation), this elevated neutral voltage will decrease
away from the fault location and becomes less than 100V before
approaching the truck.
600
Islanded Neutral € 500 -
Full Neutral
300 -
200 -
Truck location 100 -
Fault location
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.5 6.0 6.5 7.0 7.5
Distance from the substation (km)
Figure 3.20 Touch voltage at truck location during a remote fault.
- 63 -
However, in the case of an islanded neutral, the GPR at the upstream
ending point is higher than the GPR at the fault location. The workers
can be exposed to a higher GPR than in the case of a full neutral.
However, the worst case of GPR for a remote fault corresponds to a
truck working at the upstream ending point of the islanded neutral.
3.7 Practical Issues of Proposed Technique
The formulae derived in this chapter are based on the main
assumptions of the presence of a regular grounding interval and
identical grounding resistances. The developed formulae are applied to
SLG faults. Questions may arise about the accuracy of the results
when these assumptions are not met. Moreover, the equivalent
impedance of ZEq is assumed to be constant. These issues are addressed
in the following subsections.
3.7.1 Irregular Grounding Interval
The equivalent impedance (Zsq) is a function of the grounding interval
(s). For a practical range of grounding intervals, the variation of ZEq is
not significant. For example, Figure 3.6 reveals that the ladder
impedance increases from 1.5Q to about 1.8Q only when the grounding
interval changes from 200m to 300m. Using an average grounding
interval will have only marginal effects on the results. The voltages
induced in the neutral segments will differ if the distances between
adjacent grounding resistances are not equal. However, the equivalent
current sources are independent of the distance between two
- 64 -
grounding points (Equation 3.8). Thus, the assumption of a uniform
grounding interval is acceptable.
3.7.2 Non-identical Grounding Resistances
It is known that the grounding resistance varies as the soil resistivity
changes at various locations along the line corridor. In such cases,
neutral segments of alike grounding resistances can be grouped
together to obtain the equivalent impedance for that particular line
section and so forth. The actual GPR profiles can deviate from the
analytical ones. However, the maximum GPRs that occur at the
current injection locations can be estimated easily. Therefore, the
estimation assuming the identical grounding resistances neither
complicates the analytical process, nor affects the results significantly.
3.7.3 Line-to-Line Fault
Although the proposed model was examined by using the single-line-to-
ground (SLG) faults, the equations developed are equally applicable to
double-line-to-ground (LLG) faults. The only difference is the fault
current magnitude, which is the sum of the currents of the two phases
under fault and is usually less than the SLG fault current. The
resulting GPR will change accordingly. A separate study is not needed
to illustrate the mechanisms.
3.8 Conclusions
The GPR mechanisms were illustrated, and an analytical technique
was established to estimate the GPR. This technique is capable of
-65-
identifying and quantifying the impact of various factors such as the
grounding resistance, grounding interval and neutral conductor size.
The method developed in this chapter was applied to estimate the GPR
in a distribution line built below the transmission line. The simulation
studies confirmed the accuracy of the analytical findings. Based on the
findings of this chapter, the following conclusions can be made:
• The mutual coupling between the phase and neutral conductors
induces the voltage in the neutral conductor, which consequently
produces the GPR.
• The magnitude of the maximum GPR is dictated mainly by the
fault current through the induced neutral current and the
equivalent impedance of the MGN.
• The GPR is proportional to the equivalent impedance of the
MGN and the square-root of the grounding resistance, the
impedance of the neutral conductor, and the grounding interval.
• The maximum GPR is located at the grounded node where the
induced current source is located.
• The induced current sources are located at the ends of the
section of the neutral length exposed to the fault current.
-66-

4. Analytical Approaches to Temporary Overvoltage
Assessment
The neutral current varies in the different segments of the neutral
wire due to the groundings at multiple points along the neutral length.
One of the challenges with a MGN system is incorporating its neutral
current in the temporary overvoltage (TOV) calculation. As a result,
the mechanisms or components leading to TOV in the MGN systems
during SLG faults have not been fully analyzed, and the effect of
neutral current on TOV has not been understood. This chapter
illustrates the mechanism of TOV and analyzes the factors that affect
its magnitude. Their impacts are quantified by establishing the
approximate formulae. The findings are confirmed by the simulation
results. Sensitivity studies are performed to examine the effects of
neural grounding parameters.
4.1 Introduction
The TOV or swell is defined as an increase of rms voltage to between
1.1 and 1.8 per unit at power frequency for durations from 0.5 cycles to
1 min [10]. A simple concept of overvoltage is shown in Figure 4.1
where the phase voltage of one phase rises above the nominal voltage
during the fault on the other phase. The overvoltages are usually
associated with system fault conditions. They can also occur due to
switching off a large load, or energizing a large capacitor bank [10].
- 67-
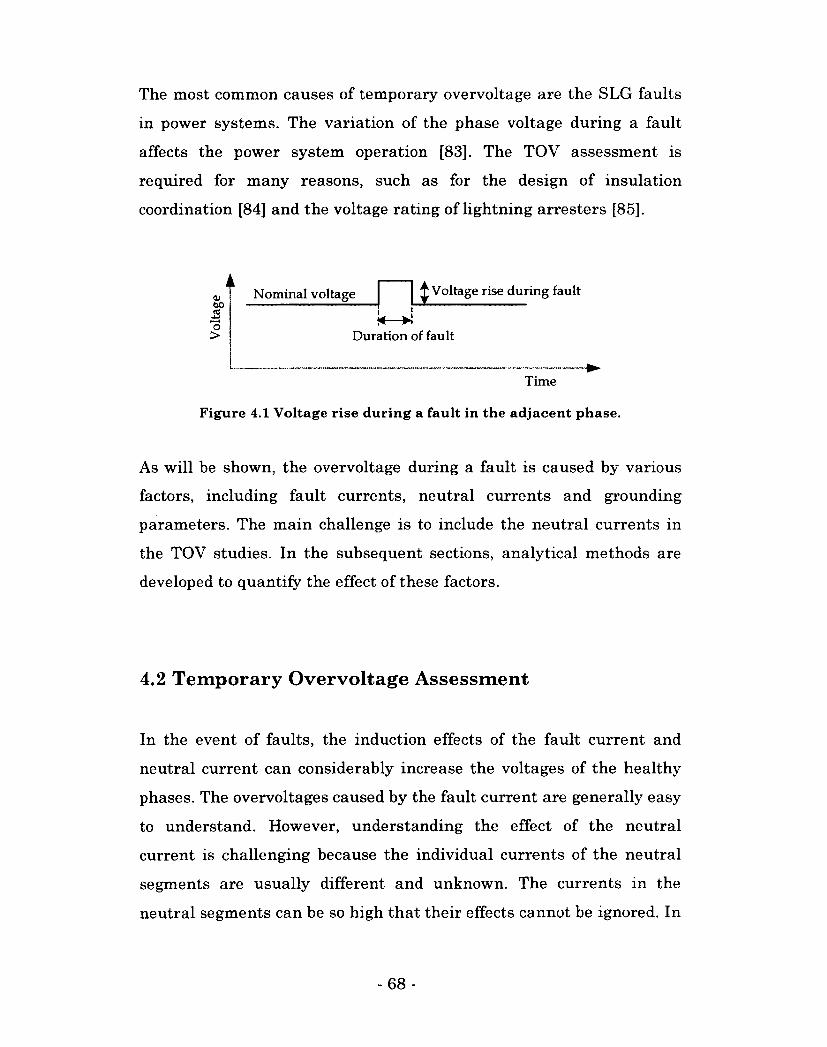
The most common causes of temporary overvoltage are the SLG faults
in power systems. The variation of the phase voltage during a fault
affects the power system operation [83]. The TOV assessment is
required for many reasons, such as for the design of insulation
coordination [84] and the voltage rating of lightning arresters [85].
<v to 2 "o >
Nominal voltage ^ Voltage rise during fault
*—•! Duration of fault
Time
Figure 4.1 Voltage rise during a fault in the adjacent phase.
As will be shown, the overvoltage during a fault is caused by various
factors, including fault currents, neutral currents and grounding
parameters. The main challenge is to include the neutral currents in
the TOV studies. In the subsequent sections, analytical methods are
developed to quantify the effect of these factors.
4.2 Temporary Overvoltage Assessment
In the event of faults, the induction effects of the fault current and
neutral current can considerably increase the voltages of the healthy
phases. The overvoltages caused by the fault current are generally easy
to understand. However, understanding the effect of the neutral
current is challenging because the individual currents of the neutral
segments are usually different and unknown. The currents in the
neutral segments can be so high that their effects cannot be ignored. In
-68-
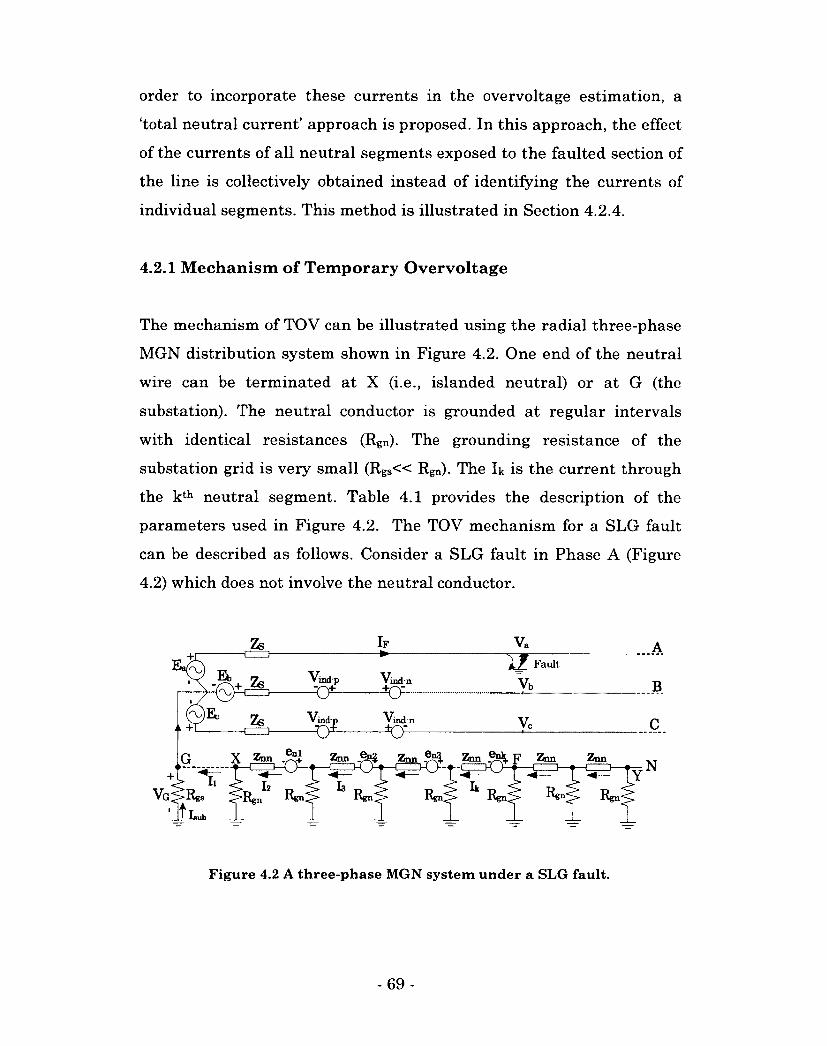
order to incorporate these currents in the overvoltage estimation, a
'total neutral current' approach is proposed. In this approach, the effect
of the currents of all neutral segments exposed to the faulted section of
the line is collectively obtained instead of identifying the currents of
individual segments. This method is illustrated in Section 4.2.4.
4.2.1 Mechanism of Temporary Overvoltage
The mechanism of TOV can be illustrated using the radial three-phase
MGN distribution system shown in Figure 4.2. One end of the neutral
wire can be terminated at X (i.e., islanded neutral) or at G (the
substation). The neutral conductor is grounded at regular intervals
with identical resistances (Rgn). The grounding resistance of the
substation grid is very small (Rgs« Rgn). The Ik is the current through
the kth neutral segment. Table 4.1 provides the description of the
parameters used in Figure 4.2. The TOV mechanism for a SLG fault
can be described as follows. Consider a SLG fault in Phase A (Figure
4.2) which does not involve the neutral conductor.
Vind- Vind:
Znn
Isub
Figure 4.2 A three-phase MGN system under a SLG fault.
- 69 -

Table 4.1 Nomenclature of parameters.
Va,Vb,V(
VG
Vind-p
6nk
Zs
Znn
IF
Ea, Eb, Ei
Phase impedance of the source (£2)
Voltage induced in the kth segment of the neutral wire (V/km)
Self-impedance of the neutral wire (Q/km)
Voltage induced in healthy phase by fault current (V)
Total voltage induced by the neutral currents (V)
Fault current (A)
Source phase voltages of Phase A, Phase B and Phase C
Phase-to-ground voltage at the fault location (V)
Substation ground voltage (V)
The fault current of Phase A induces the voltages (Vind-p) in Phase B
and Phase C. As well, the neutral current induces the voltages (Vind-n)
in Phase B and Phase C. The fault current flowing back to the source
through Rgs creates the voltage VG in the substation. The interaction of
these voltages causes a voltage rise in Phase B and Phase C. The phase
voltages can be expressed as
Since all the elements in (4.1) are vectors, voltage Vind-n and Vind-p
interact oppositely as the neutral current flows in the direction
opposite to the fault current. For the evaluation of Vind-n, the proposed
'total neutral current' approach will be used.
Referring to (4.1), the TOV (or voltage swell) for Phase B and Phase C
can be expressed as
(4.1)
- 70 -

VtOV _ + Xnd-p"^ind-n • (4-2)
The three components of (4.2) are individually computed in the
following subsections.
4.2.2 Substation Neutral Voltage Rise
The first component, the substation neutral voltage rise (Vg), is the
product of the amount of fault current returning to the substation and
grounding resistance of substation Rgs, which is given by
Y3 ~ "URgs > (4.3)
where ISub is the current that flows through Rgs. The highest possible
amount of this current is equal to the fault current (IF) when the
neutral conductor is isolated from the substation. Therefore, the
maximum substation neutral voltage rise is given as
Vo islandN — "^F^gs • (4-4)
When the neutral is terminated in the substation, the Isub is
approximately given by IF-II; then
Va-fuiiN — "^F ~~ Ii)R„ • (4.5)
As shown in Chapter 2, II is about 35% of IF- Then the substation GPR
will be 35% less than that of the islanded neutral case.
- 71 -
4.2.3 Voltage Induced by Fault Current
The component Vind-P in (4.2) is the voltage induced by the fault current
in the healthy phases (B and C) through mutual impedances. This
voltage is given by
where
d = the fault distance from substation (km)
Zmp = the phase-to-phase mutual impedance (Q/km)
ZSM = the source mutual impedance (Q)
IF = the fault current (A).
4.2.4 Voltage Induced by Neutral Current
Again, consider the neutral circuit of Figure 4.2 where the voltages
induced in the neutral conductor by the fault current are also shown.
The neutral section downstream of the fault location does not have any
induced voltages. The total voltage induced in a phase conductor by
neutral current is given by
VIND-P - (ZSM +Zmpd)lF> (4-6)
Vmd-n = -GlZmn + l2Zmn + I3Zmn + ) = "Lm2: sum mn > (4.7)
where
I sum 2X for all k
Now the goal is to find I8um. The voltage VNF is expressed as sum.
- 72 -
sum' sum nn
I 1
(V-V^d) , (4.8) sum z nn
where
(4-9)
Equation (4.8) has a special meaning. The unknown variables on the
right-hand side of the equation are the GPRs at the fault location and
upstream end of the neutral wire (or substation), which can be
obtained by the method developed in Chapter 3. Thus, the sum of the
currents of the neutral segments is obtained by substituting these GPR
values as shown below.
Case 1: Neutral Terminated in the Substation
In this case, the voltage drop in the substation grounding resistance is
very small such that VG « VNF (typical Rgs ~ 0.15Q). Then from (4.9),
"'•sum _ (^NF + en^)^Znn
where
VNF = -iNz N Eq-F •
Then
= (-IwZP„ F + e„d)/zn„ sum \ N bq*r n / nn
~ ( ^Eq F/Znn +^N^)
Isum = (-^Eq F/Znn + * (4.10)
- 73 -
Thus, the voltage induced by the neutral current will be
v ind-n sum
(4.11) nn
Case 2: Neutral Isolated from the Substation
For the islanded case, the neutral terminates at X, affecting the
amount of current flowing in the neutral segments, so the ISum needs to
be recalculated. By replacing the VG by VNX in (4.8), the total current
becomes
As the equivalent impedance at X is two times the equivalent
impedance of F, the GPR at X will be two times larger than the GPR at
F. However, the polarity is opposite; i.e., VNX= -2VNF- Substituting VNF
= -iNZEq-F in Equation (4.12),
U = — (VNF-V N X + e„d) . z
(4.12)
^sum ~~ ( ^^Eq-F/Znn + * (4.13)
The voltage induced by the neutral current will be
ind-n sum mn nn
(4.14)
which is less than the value given by (4.11).
- 74-
Now the VTOV for the case where the neutral is terminated at the
substation can be obtained by substituting the Vind-p from (4.6) and
Vind-n from (4.11) into (4.2) as
Vtov = ^G ~ ^SM^F + Zmp^F^Zmn^N ^EqF^N • (4.15) Znn
Similarly, the VTOV for the islanded neutral case can be found by
substituting Vind-n from (4.14) into (4.2). By using (4.15), the total
voltage of Phase B at the fault location becomes
^b-Eh+ Vq "(ZSM+zmpd)IF+ zmndIN " J™ _ (4.16) 1 » v i v v
(1) Sub (2) Fault current (3) Neutral current » „ caused voltage caused voltage (4) Grounding
related voltage
The voltage of Phase C (i.e., Vc) can be obtained by replacing EB by EC
in (4.16). The components of the TOV identified in (4.16) are as follows:
• Factor 1: Substation neutral voltage rise.
• Factor 2: Voltage caused by the fault current.
• Factor 3: Voltage caused by the induced neutral current.
• Factor 4: Voltage related with grounding parameters as reflected
in the equivalent grounding impedance.
The contribution of each factor can be illustrated by using an example.
Consider a SLG fault in Phase A at 6km downstream from the
substation. The voltages developed during the fault are given in Table
4.2. The Factors 1 to 4 develop in both Phase B and Phase C equally.
However, their percentage contributions to Phase B and Phase C will
be different due to unique phase relationships (Figure 4.3).
- 75 -
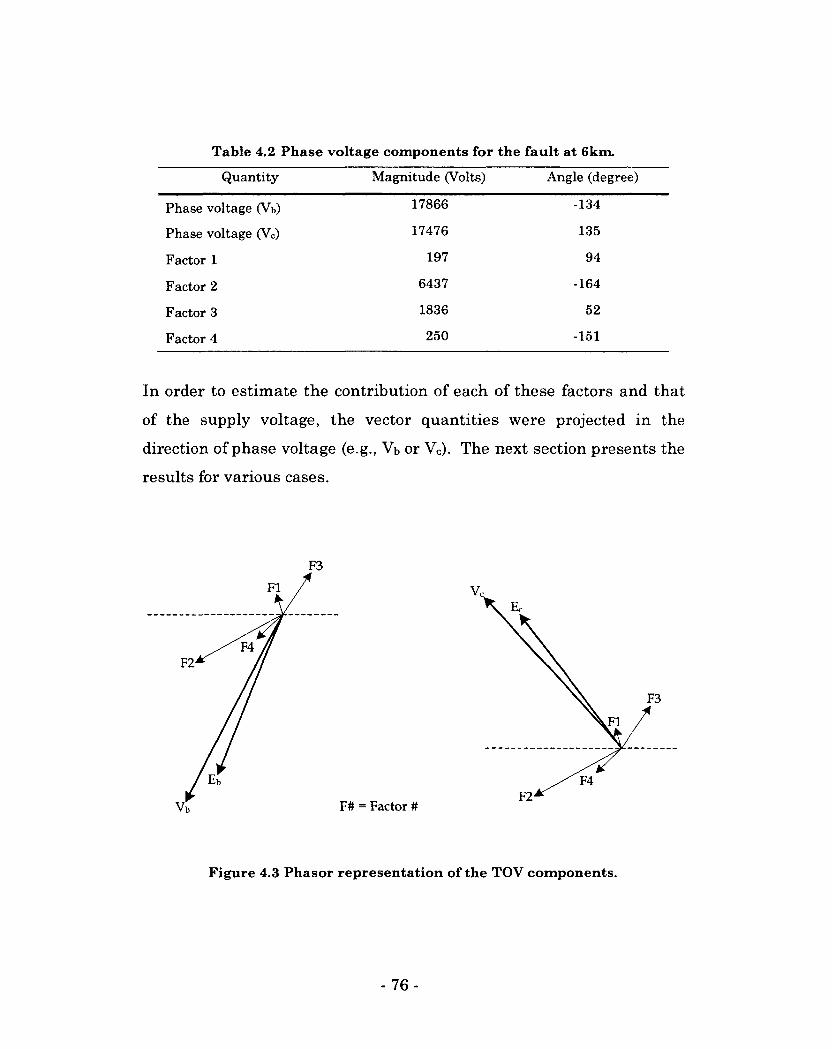
Table 4.2 Phase voltage components for the fault at 6km.
Quantity Magnitude (Volts) Angle (degree)
Phase voltage (Vb) 17866 -134
Phase voltage (Vc) 17476 135
Factor 1 197 94
Factor 2 6437 -164
Factor 3 1836 52
Factor 4 250 -151
In order to estimate the contribution of each of these factors and that
of the supply voltage, the vector quantities were projected in the
direction of phase voltage (e.g., Vb or Vc). The next section presents the
results for various cases.
F3
F2
Figure 4.3 Phasor representation of the TOY components.
- 76-
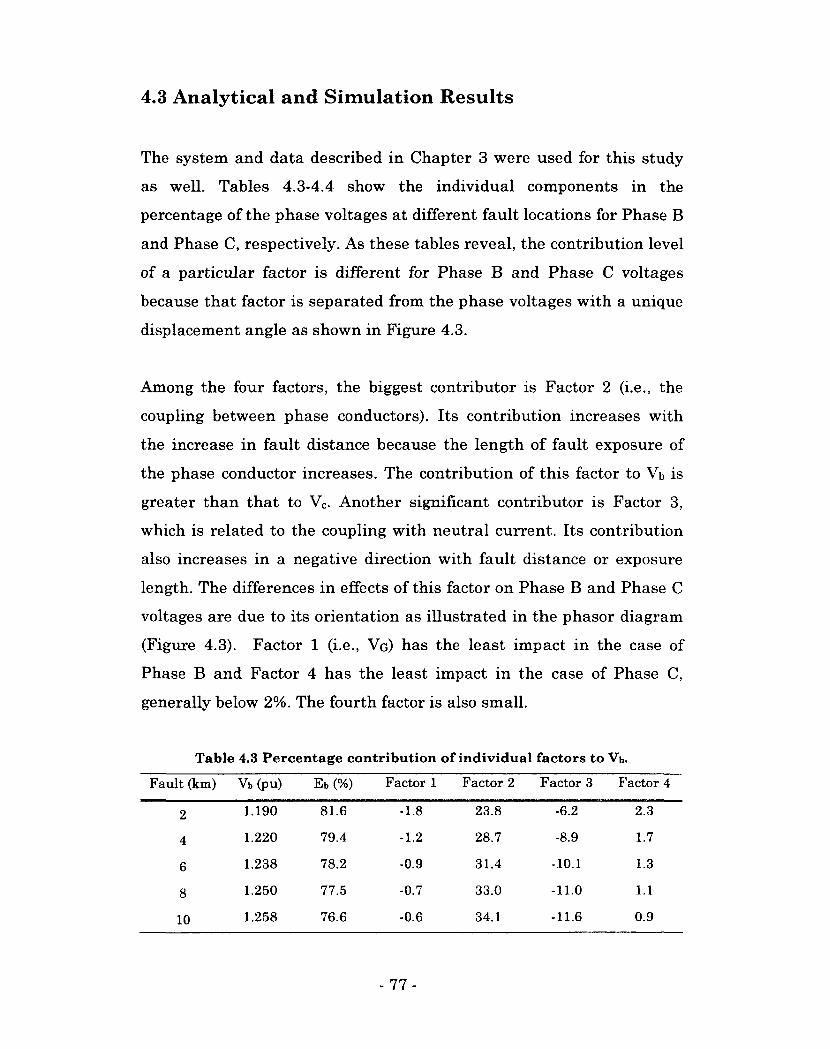
4.3 Analytical and Simulation Results
The system and data described in Chapter 3 were used for this study
as well. Tables 4.3-4.4 show the individual components in the
percentage of the phase voltages at different fault locations for Phase B
and Phase C, respectively. As these tables reveal, the contribution level
of a particular factor is different for Phase B and Phase C voltages
because that factor is separated from the phase voltages with a unique
displacement angle as shown in Figure 4.3.
Among the four factors, the biggest contributor is Factor 2 (i.e., the
coupling between phase conductors). Its contribution increases with
the increase in fault distance because the length of fault exposure of
the phase conductor increases. The contribution of this factor to Vb is
greater than that to Vc. Another significant contributor is Factor 3,
which is related to the coupling with neutral current. Its contribution
also increases in a negative direction with fault distance or exposure
length. The differences in effects of this factor on Phase B and Phase C
voltages are due to its orientation as illustrated in the phasor diagram
(Figure 4.3). Factor 1 (i.e., VG) has the least impact in the case of
Phase B and Factor 4 has the least impact in the case of Phase C,
generally below 2%. The fourth factor is also small.
Table 4.3 Percentage contribution of individual factors to Vb.
Fault (km) Vb(pu) Eb (%) Factor 1 Factor 2 Factor 3 Factor 4
2 1.190 81.6 -1.8 23.8 -6.2 2.3
4 1.220 79.4 -1.2 28.7 -8.9 1.7
6 1.238 78.2 -0.9 31.4 -10.1 1.3
8 1.250 77.5 -0.7 33.0 -11.0 1.1
10 1.258 76.6 -0.6 34.1 -11.6 0.9
- 77-
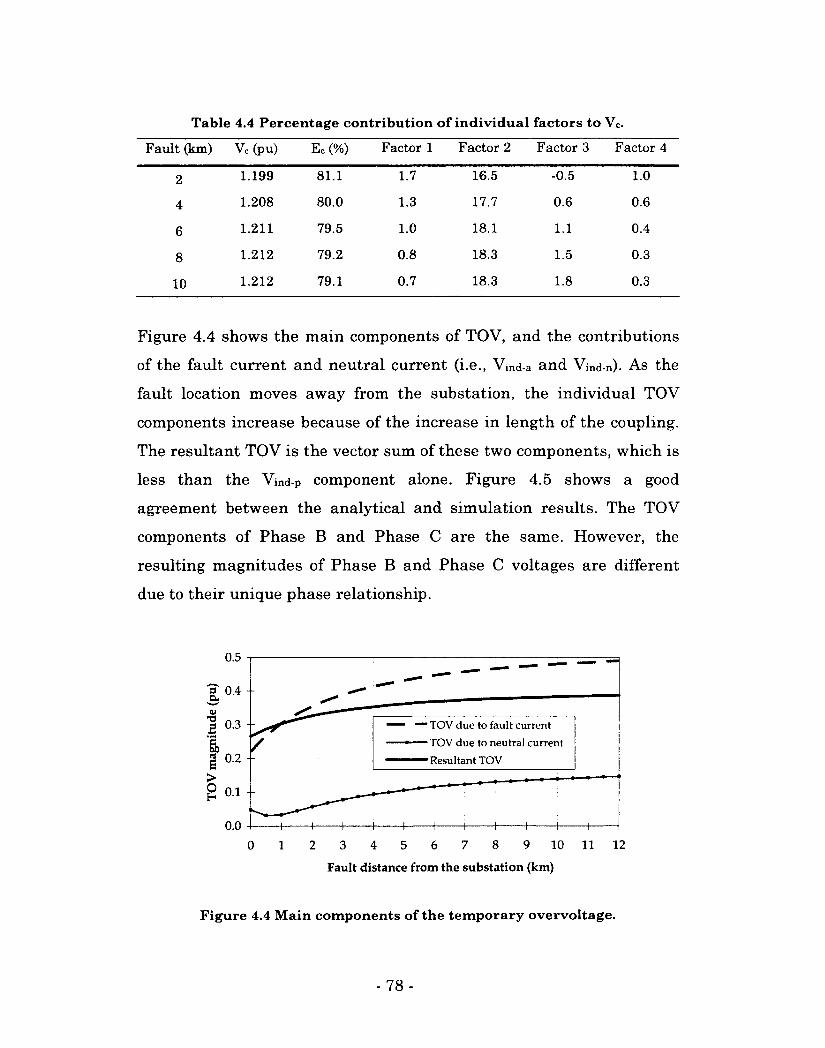
Table 4.4 Percentage contribution of individual factors to Vc.
Fault (km) Vc (pu) Ec (%) Factor 1 Factor 2 Factor 3 Factor 4
2 1.199 81.1 1.7 16.5 -0.5 1.0
4 1.208 80.0 1.3 17.7 0.6 0.6
6 1.211 79.5 1.0 18.1 1.1 0.4
8 1.212 79.2 0.8 18.3 1.5 0.3
10 1.212 79.1 0.7 18.3 1.8 0.3
Figure 4.4 shows the main components of TOV, and the contributions
of the fault current and neutral current (i.e., Vind-a and Vind-n). As the
fault location moves away from the substation, the individual TOV
components increase because of the increase in length of the coupling.
The resultant TOV is the vector sum of these two components, which is
less than the Vind-p component alone. Figure 4.5 shows a good
agreement between the analytical and simulation results. The TOV
components of Phase B and Phase C are the same. However, the
resulting magnitudes of Phase B and Phase C voltages are different
due to their unique phase relationship.
0.5
1? 0.4 -•£>
0.4 -0)
•o 2 0.3 -
1 / £ 0.2 -
> O H 0.1 -
• TOV due to fault current
-TOV due to neutral current
•Resultant TOV
+
2 3 4 5 6 7 8 9 1 0
Fault distance from the substation (km)
11 12
Figure 4.4 Main components of the temporary overvoltage.
- 78-
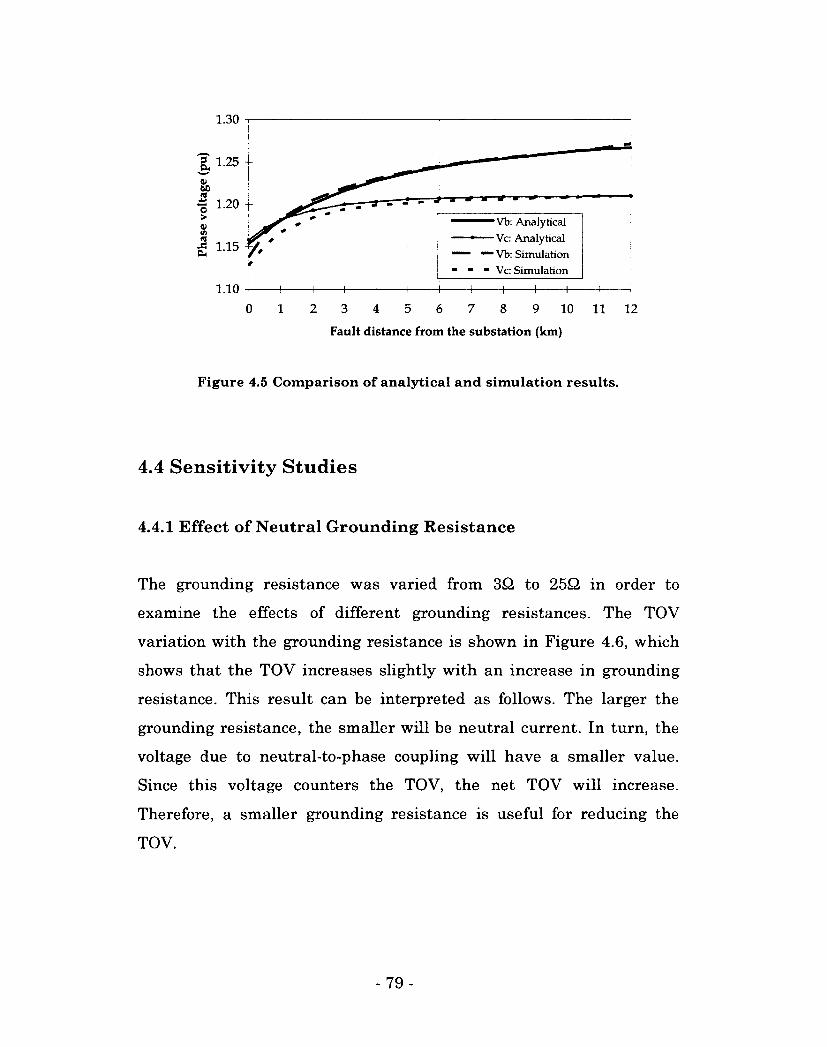
1.30
g. 1-25 -
3 1-20 -
Vb: Analytical -• Vc: Analytical " •— Vb: Simulation " " Vc: Simulation
rfi 1.15
1.10
0 2 3 5 7 1 4 6 8 9 10 11 12
Fault distance from the substation (km)
Figure 4.5 Comparison of analytical and simulation results.
4.4 Sensitivity Studies
4.4.1 Effect of Neutral Grounding Resistance
The grounding resistance was varied from 3£2 to 25Q in order to
examine the effects of different grounding resistances. The TOV
variation with the grounding resistance is shown in Figure 4.6, which
shows that the TOV increases slightly with an increase in grounding
resistance. This result can be interpreted as follows. The larger the
grounding resistance, the smaller will be neutral current. In turn, the
voltage due to neutral-to-phase coupling will have a smaller value.
Since this voltage counters the TOV, the net TOV will increase.
Therefore, a smaller grounding resistance is useful for reducing the
TOV.
- 79-
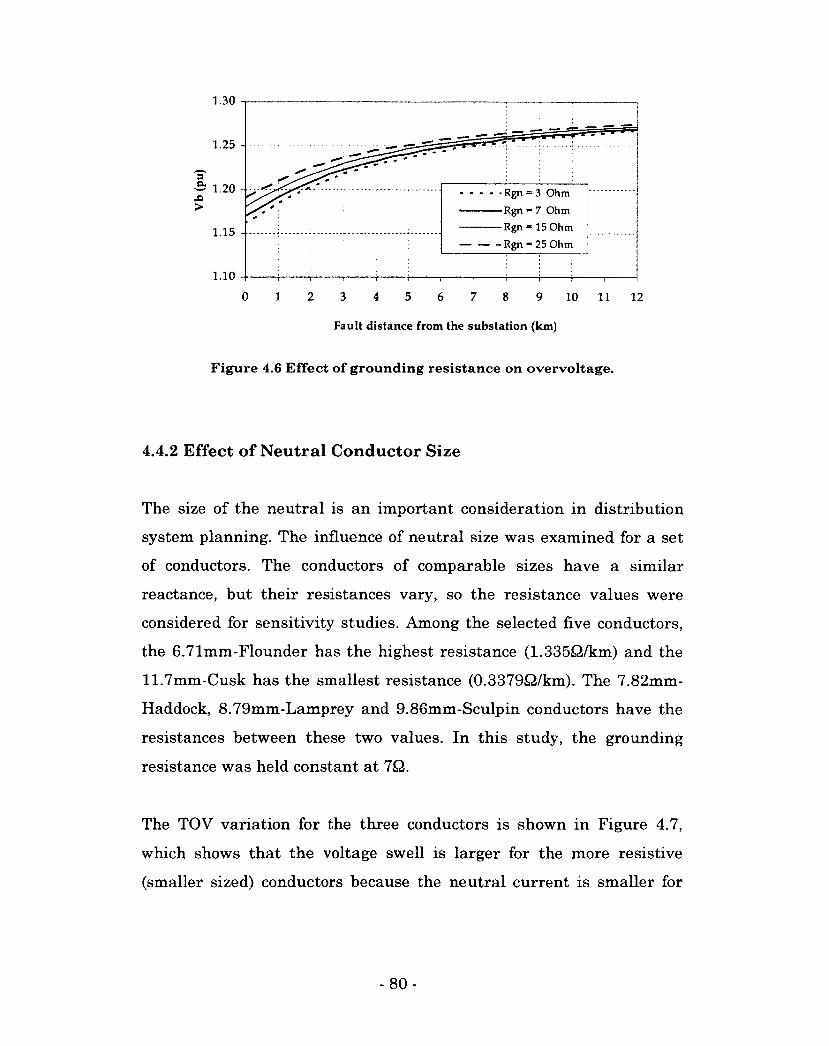
1.30
1.25 -
& 1.20 < •® "V/ — • Rgn = 3 Ohm
— Rgn = 7 Ohm
— Rgn = 15 Ohm
• - Rgn = 25 Ohm 1.15 -
1.10
0 1 2 3 4 5 7 6 8 9 10 11 12
Fault distance from the substation (km)
Figure 4.6 Effect of grounding resistance on overvoltage.
4.4.2 Effect of Neutral Conductor Size
The size of the neutral is an important consideration in distribution
system planning. The influence of neutral size was examined for a set
of conductors. The conductors of comparable sizes have a similar
reactance, but their resistances vary, so the resistance values were
considered for sensitivity studies. Among the selected five conductors,
the 6.71mm-Flounder has the highest resistance (1.335£2/km) and the
11.7mm-Cusk has the smallest resistance (0.3379Q/km). The 7.82mm-
Haddock, 8.79mm-Lamprey and 9.86mm-Sculpin conductors have the
resistances between these two values. In this study, the grounding
resistance was held constant at 7Q.
The TOV variation for the three conductors is shown in Figure 4.7,
which shows that the voltage swell is larger for the more resistive
(smaller sized) conductors because the neutral current is smaller for
-80-
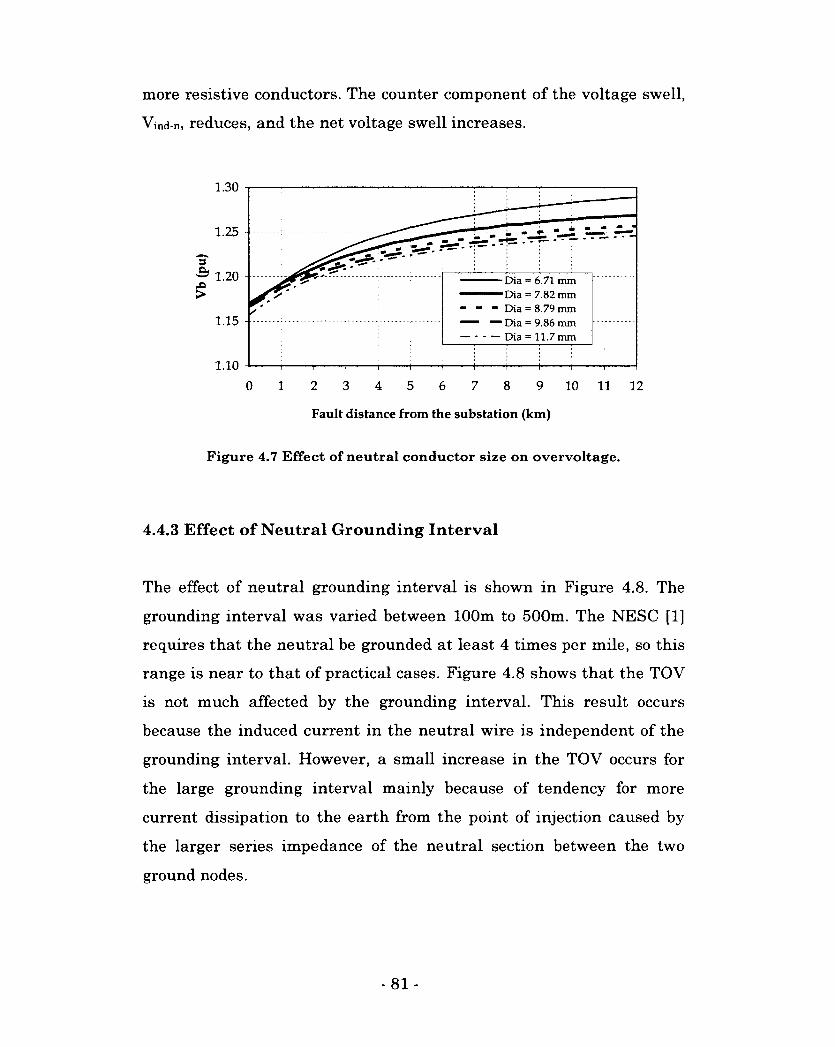
more resistive conductors. The counter component of the voltage swell,
Vind-n, reduces, and the net voltage swell increases.
1.30
1.25 -
•=> 1.20 - Dia = 6.71 mm 1 Dia = 7.82 mm
" ~ Dia = 8.79 mm " — Dia = 9.86 mm - - — Dia = 11.7 mm
1.15 -
1.10 4
0 2 3 4 5 7 8 9 10 11 12 1 6
Fault distance from the substation (km)
Figure 4.7 Effect of neutral conductor size on overvoltage.
4.4.3 Effect of Neutral Grounding Interval
The effect of neutral grounding interval is shown in Figure 4.8. The
grounding interval was varied between 100m to 500m. The NESC [1]
requires that the neutral be grounded at least 4 times per mile, so this
range is near to that of practical cases. Figure 4.8 shows that the TOV
is not much affected by the grounding interval. This result occurs
because the induced current in the neutral wire is independent of the
grounding interval. However, a small increase in the TOV occurs for
the large grounding interval mainly because of tendency for more
current dissipation to the earth from the point of injection caused by
the larger series impedance of the neutral section between the two
ground nodes.
- 81 -
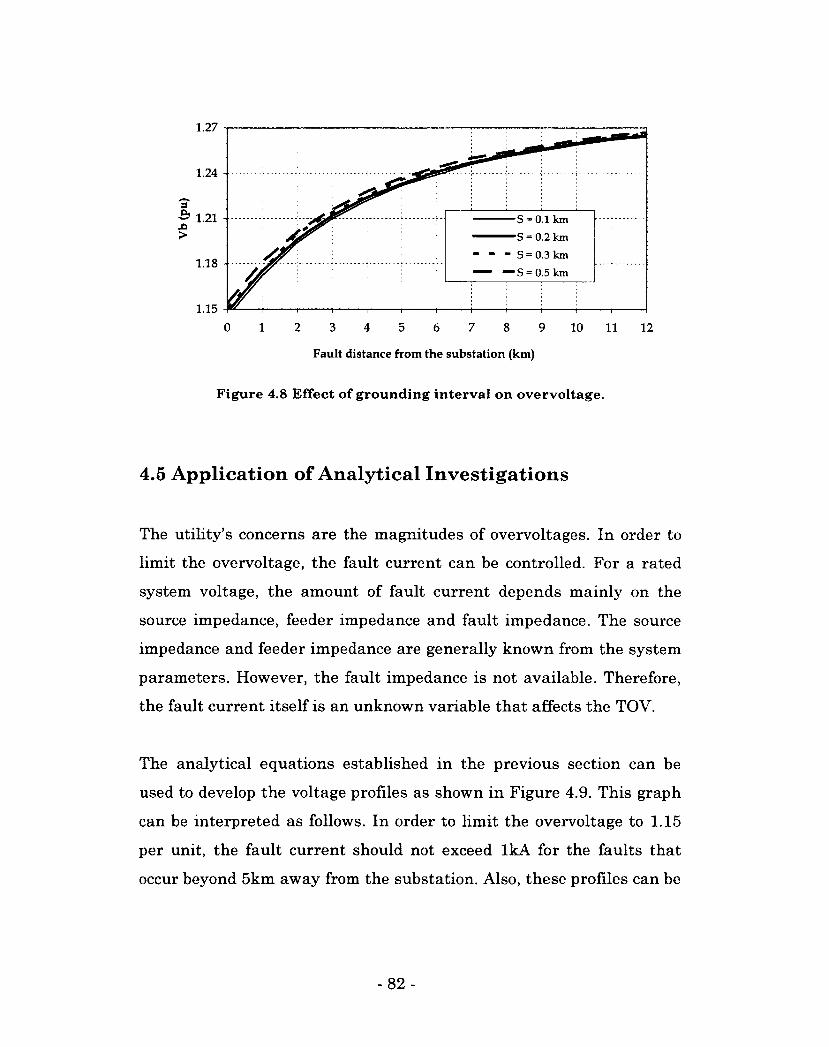
1.27
1.24
— 1.21 S = 0.1 km
S = 0.2 km
" " S = 0.3 km
" — S = 0.5 km 1.18 -
1.15 -I 0 1 2 3 7 4 5 6 8 9 10 11 12
Fault distance from the substation (km)
Figure 4.8 Effect of grounding interval on overvoltage.
4.5 Application of Analytical Investigations
The utility's concerns are the magnitudes of overvoltages. In order to
limit the overvoltage, the fault current can be controlled. For a rated
system voltage, the amount of fault current depends mainly on the
source impedance, feeder impedance and fault impedance. The source
impedance and feeder impedance are generally known from the system
parameters. However, the fault impedance is not available. Therefore,
the fault current itself is an unknown variable that affects the TOV.
The analytical equations established in the previous section can be
used to develop the voltage profiles as shown in Figure 4.9. This graph
can be interpreted as follows. In order to limit the overvoltage to 1.15
per unit, the fault current should not exceed lkA for the faults that
occur beyond 5km away from the substation. Also, these profiles can be
-82-
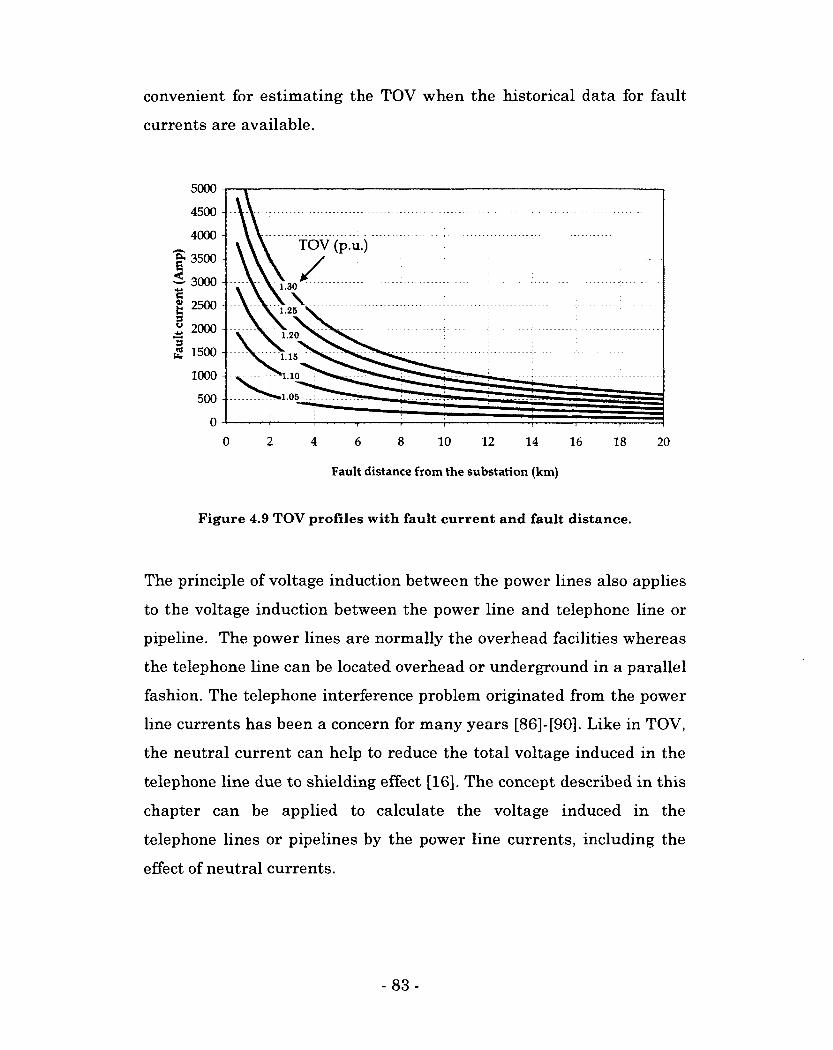
convenient for estimating the TOV when the historical data for fault
currents are available.
5000
4500
4000 TOV (p.u.)
"S E <
3500
3000 1.30 c a s u
2500 1.25
_ 2000
| 1500 1.20
1.15
1000 '1.10
.1.05 500
2 4 8 0 6 10 12 14 16 18 20
Fault distance from the substation (km)
Figure 4.9 TOV profiles with fault current and fault distance.
The principle of voltage induction between the power lines also applies
to the voltage induction between the power line and telephone line or
pipeline. The power lines are normally the overhead facilities whereas
the telephone line can be located overhead or underground in a parallel
fashion. The telephone interference problem originated from the power
line currents has been a concern for many years [86]-[90]. Like in TOV,
the neutral current can help to reduce the total voltage induced in the
telephone line due to shielding effect [16]. The concept described in this
chapter can be applied to calculate the voltage induced in the
telephone lines or pipelines by the power line currents, including the
effect of neutral currents.
-83-
4.6 Conclusions
In this chapter, the temporary overvoltage (TOV) mechanism was
illustrated and the analytical technique was developed to calculate the
TOV. The "total neutral current" approach was introduced to include
the neutral currents in calculations. This method distinguishes the
overvoltage contributions of various factors such as the fault current
and neutral current. The analytical results were confirmed through the
simulation studies. The following are the main conclusions:
• The voltages induced by the fault current and the neutral
current are the most decisive factors for the TOV. While the
fault current caused about 30% to the TOV, the neutral current
compensated by about 10%. Therefore, the neutral currents
should be included in the overvoltage calculation.
• The substation neutral voltage contributed less than 2% when
the substation grounding resistance is 0.15Q.
• The neutral grounding parameters such as the grounding
resistance and grounding interval also have a small impact on
the TOV.
The concept of the total neutral current approach proposed in this
chapter can be also applied to calculate the voltage induction in the
nearby parallel conductors such as the pipelines and telephone cables.
The finding of neutral current effects is significant in the study of the
power-line-to-telephone interference problem.
- 84-

5. A Novel Approach to Stray Voltage Contribution
Determination
The incorrect usage of stray-voltage-related terms has created
confusion. As well, several factors are responsible for stray voltage
problems. After defining stray-voltage-related terms and briefly
discussing the causes of stray voltage, this chapter illustrates the
mechanism of stray voltage generation. The utility is generally blamed
for the stray voltage problems in a customer facility because the high
NEV of the MGN (utility circuit) propagates to the customer circuit. In
this chapter, a measurement-based approach is proposed for
distinguishing the stray voltage contributions of the utility (off-site
source) and customer (on-site source). The feasibility of the proposed
method is verified through analytical studies, simulations and field
tests. The potential applications of the method are investigated, and
various implementation issues are clarified.
5.1 Introduction
Stray voltage has been a danger to farm livestock for many years.
Animals are more susceptible to problems associated with stray voltage
than humans due to their physiological differences. Therefore, stray
voltage studies have been carried out on animals such as cows, pigs,
sheep, and poultry [61],[91]-[94].
- 85 -
In recent years, complaints of stray-voltage-related problems involving
humans have become more frequent. For instance, cases of an
electrical sensation felt when showering, and a tingling sensation felt
when entering and exiting swimming pools have been reported.
Investigations revealed that these problems originated from the bare
corroded concentric neutral of the distribution system. Stray voltage
has been blamed for similar electrical phenomena that commonly occur
in metallic fences, street lights or utility poles, and underground
manholes. However, these phenomena could have been caused by
something else, such as contact voltage, step or touch voltage and
static discharge. To appreciate the difference between stray voltage
and other phenomena that are incorrectly referred to as stray voltages,
the definitions must be reviewed so that the actual sources of stray
voltage can be understood.
5.1.1 Terms and Definitions
The terms commonly associated with stray-voltage-related electrical
phenomena are defined as follows:
Stray voltage: Generally, it refers to a small voltage, not exceeding
about 10V, due mainly to return currents originating from an
unbalanced load during the normal operations of power delivery.
Stray voltages are significantly less than the voltages considered
dangerous by the National Electrical Safety Code [1], which sets
the limit at 50V. Therefore, stray voltage is not considered lethal.
Stray current: Some people use this term to refer to the situation in
which any current is entering the earth, because they believe that
-86-
the current, not the voltage, causes death [57], In fact, however,
the current is created from the stray voltage.
Touch voltage: This is the potential difference between the ground
potential rise (GPR) of a grounded structure and the surface
potential at the point where a person is standing while at the same
time touching that grounded structure [19]. The touch voltage is
related to the faults in the system. A person can experience touch
voltage between a hand and a foot.
Step voltage: This is the difference in surface potential experienced
by a person bridging a distance of lm with his/her feet without
contacting any other grounded object [19]. Step voltage is also
associated with the faults in the system. This voltage can occur
between the two feet of an individual during a fault.
Contact voltage: Contact voltage occurs in places similar to those of
stray voltage, but can be dangerous and can result in death. This
voltage is a result of faults in the system [19] and can arise from
improper wiring, a fault or leakage current. Using a neutral
conductor as a ground wire, or interchanging the neutral and phase
wires in the connections are examples of incorrect wiring. The
voltages originating from equipment faults and damaged insulation
of the conductor or equipment fall under this category.
Static discharge: Static electricity is usually produced by friction,
i.e., when two materials are rubbed together. A person may
experience an electrical shock when he or she touches an object,
and static electricity suddenly discharges. This phenomenon does
not occur with stray voltage [57].
- 87 -
5.1.2 Main Causes of Stray Voltage
The first step in the investigation of the stray voltage problem is to
identify its major causes. Its main cause is the voltage that develops on
a grounded neutral wiring network of a power delivery system (a
primary circuit) and/or a power utilization system (a secondary circuit)
due to the primary return current, secondary return current and power
system induced current [7]. Grounding is provided to keep the voltage
potential between the neutral system and the earth below levels that
could be harmful to people or animals [17]. Thus, the voltage potentials
in the primary and secondary neutral circuits are the main causes of
stray voltage. Such voltage potentials may arise for a variety of
reasons, including the following:
• Unbalanced single-phase loads in the secondary system.
• Excessive neutral current in the primary feeder.
• High resistance or loose connections.
• High resistance in the neutral conductor.
• Inductive coupling between the neutral wire and the energized
parallel conductors in the primary system.
• Excessive harmonics in the system.
The secondary circuit consists of two phase wires and a neutral. Some
loads are connected between the first phase wire and the neutral, some
are connected between the second phase wire and the neutral, and the
other loads are connected between the two phases. Normally, the group
of loads in one phase is not equal to the group of loads in the other
phase. Therefore, the current resulting from this unbalanced load will
flow into the neutral of the secondary system. High resistance in the
neutral wire prevents this current from returning through the neutral
wire, so more current is diverted to the ground, creating high stray
- 88 -
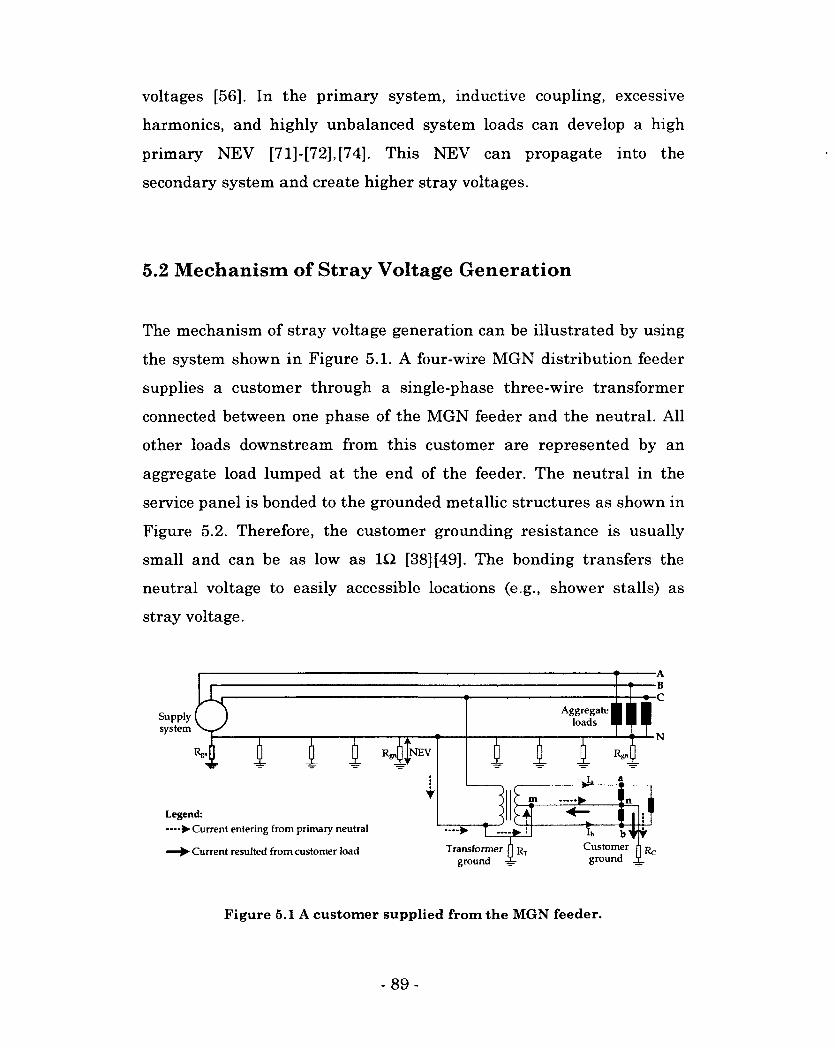
voltages [56], In the primary system, inductive coupling, excessive
harmonics, and highly unbalanced system loads can develop a high
primary NEV [71]-[72],[74]. This NEV can propagate into the
secondary system and create higher stray voltages.
5.2 Mechanism of Stray Voltage Generation
The mechanism of stray voltage generation can be illustrated by using
the system shown in Figure 5.1. A four-wire MGN distribution feeder
supplies a customer through a single-phase three-wire transformer
connected between one phase of the MGN feeder and the neutral. All
other loads downstream from this customer are represented by an
aggregate load lumped at the end of the feeder. The neutral in the
service panel is bonded to the grounded metallic structures as shown in
Figure 5.2. Therefore, the customer grounding resistance is usually
small and can be as low as in [38] [49]. The bonding transfers the
neutral voltage to easily accessible locations (e.g., shower stalls) as
stray voltage.
Aggregate loads Supply
system
•A B
•C
N
a
Legend: • Current entering from primary neutral
Transformer ground I* cg~ifc Customer Current resulted from customer load
Figure 5.1 A customer supplied from the MGN feeder.
- 89-
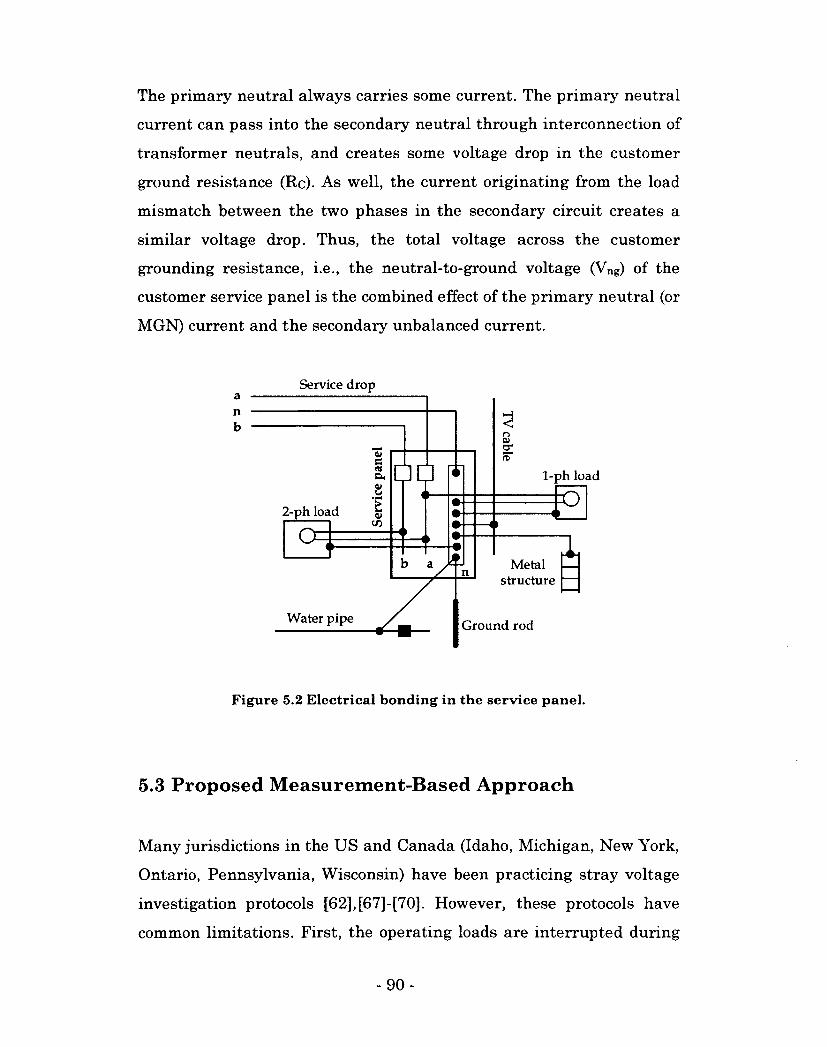
The primary neutral always carries some current. The primary neutral
current can pass into the secondary neutral through interconnection of
transformer neutrals, and creates some voltage drop in the customer
ground resistance (Rc). As well, the current originating from the load
mismatch between the two phases in the secondary circuit creates a
similar voltage drop. Thus, the total voltage across the customer
grounding resistance, i.e., the neutral-to-ground voltage (Vng) of the
customer service panel is the combined effect of the primary neutral (or
MGN) current and the secondary unbalanced current.
Service drop
1-ph load
2-ph load
Metal structure
Water pipe Ground rod
DP
Figure 5.2 Electrical bonding in the service panel.
5.3 Proposed Measurement-Based Approach
Many jurisdictions in the US and Canada (Idaho, Michigan, New York,
Ontario, Pennsylvania, Wisconsin) have been practicing stray voltage
investigation protocols [62],[67]-[70]. However, these protocols have
common limitations. First, the operating loads are interrupted during
-90-
the test, but such an interruption is not desirable. Second, one or more
proxy loads such as a portable load box are required. Finally, these
approaches need to measure the stray voltage even during the
preliminary assessment for which the relative contributions of the
utility and customer are sufficient. Measuring a stray voltage requires
a reference ground, which is generally provided by using a temporary
ground rod. In some cases, driving a temporary ground rod is difficult
or sometimes not feasible.
In this thesis, a novel idea is proposed for distinguishing the on-site
and off-site sources of the stray voltage in a customer facility. The
primary goal is to identify whether the stray voltage source is located
within or outside the customer facility by measuring the currents only.
The secondary goal is to investigate the potential applications for
helping to pinpoint the parameters, such as the grounding resistance
or neutral conductor, responsible for the stray voltage problem. The
stray voltage is included in the measurement for the same purpose. In
order to achieve these goals, a method is established by performing the
following main tasks:
• The concept of decoupling the neutral current into two
components (utility-component and customer-component) is
introduced. To decouple the neutral current, an analytical model
is developed based on the concept of the current return ratio (K).
• Based on the analytical model, a measurement-based technique is
proposed to determine the ratio K. Subsequently, the
contributions of the utility and customer are calculated.
• The proposed method was verified through simulation and tested
by using the field results.
-91 -
The proposed method has the following advantages:
• The operating customer loads are not interrupted.
• Proxy loads such as a portable load box and associated hardware
are eliminated.
• The relative contributions of the on-site and off-site sources are
determined without measuring the stray voltage, so the
temporary ground rod is also eliminated.
• The circuit conditions such as the neutral deterioration and
customer grounding may be identified.
The measurements are taken at the utility-customer interface point
(i.e., the service panel). The currents that need to be measured in the
secondary system are the phase and neutral currents (three currents in
a single-phase three-wire system and four currents in a three-phase
four-wire system). The approach is illustrated by using the single-
phase three-wire system with single-phase loads. The procedure is also
applicable to the three-phase systems.
5.3.1 Concepts and Motivation
Figure 5.3 illustrates the composition of stray voltage. The total
current flowing through the resistance of the customer ground is Ig,
which is composed of two components: the current coming from the
customer load (Igc) and the current entering from the utility or external
circuit (Ige). The stray voltage at the neutral bus (Vng) is proportional to
the current Ig because it is the product of Ig and Re- Therefore, the
relative contributions of the utility and customer can be obtained by
using the currents only.
- 92 -
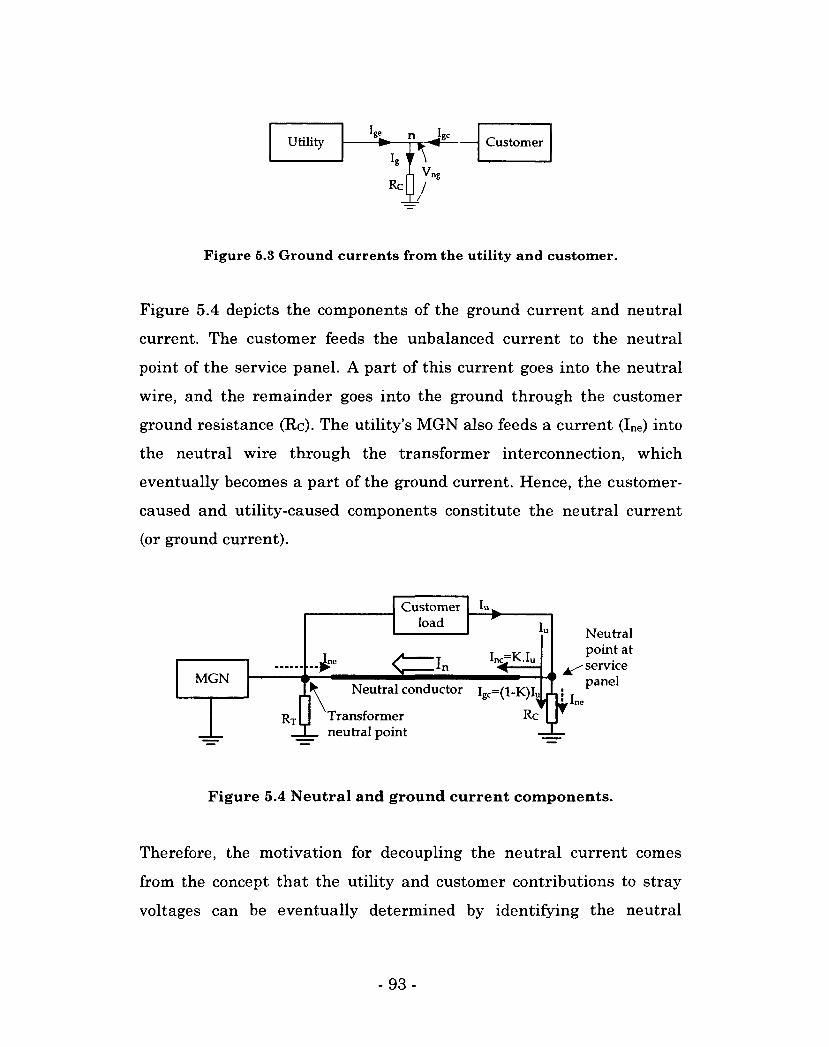
Utility Customer
Figure 5.3 Ground currents from the utility and customer.
Figure 5.4 depicts the components of the ground current and neutral
current. The customer feeds the unbalanced current to the neutral
point of the service panel. A part of this current goes into the neutral
wire, and the remainder goes into the ground through the customer
ground resistance (Rc). The utility's MGN also feeds a current (Ine) into
the neutral wire through the transformer interconnection, which
eventually becomes a part of the ground current. Hence, the customer-
caused and utility-caused components constitute the neutral current
(or ground current).
MGN
Customer load
I u >
Iu
C=In Inc=K.Iu
^ Neutral conductor lgc=(l-K)Iu
Transformer Rc RTIj
Neutral point at service panel
1 neutral point
»J | ! T
Figure 5.4 Neutral and ground current components.
Therefore, the motivation for decoupling the neutral current comes
from the concept that the utility and customer contributions to stray
voltages can be eventually determined by identifying the neutral
- 93 -
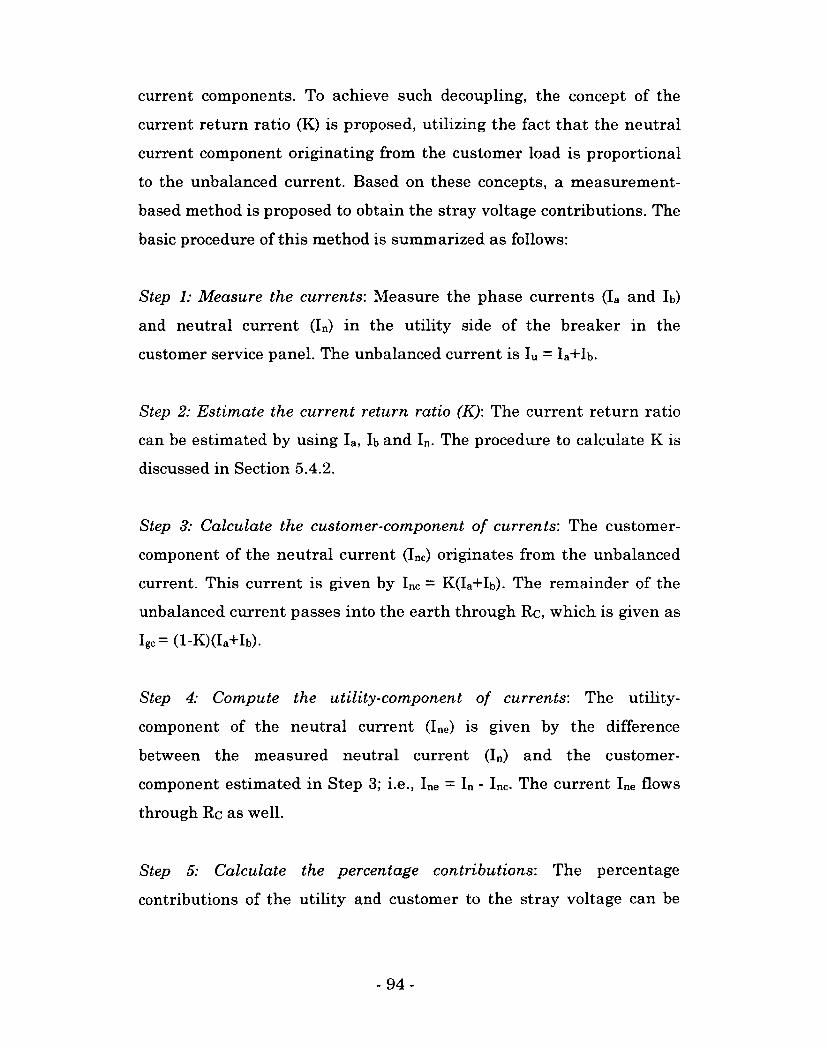
current components. To achieve such decoupling, the concept of the
current return ratio (K) is proposed, utilizing the fact that the neutral
current component originating from the customer load is proportional
to the unbalanced current. Based on these concepts, a measurement-
based method is proposed to obtain the stray voltage contributions. The
basic procedure of this method is summarized as follows:
Step 1: Measure the currents: Measure the phase currents (Ia and lb)
and neutral current (In) in the utility side of the breaker in the
customer service panel. The unbalanced current is Iu = Ia+Ib.
Step 2: Estimate the current return ratio (K): The current return ratio
can be estimated by using Ia, lb and In. The procedure to calculate K is
discussed in Section 5.4.2.
Step 3: Calculate the customer-component of currents: The customer-
component of the neutral current (Inc) originates from the unbalanced
current. This current is given by Inc — K(Ia+Ib). The remainder of the
unbalanced current passes into the earth through Rc, which is given as
Igc= (l-K)(Ia+Ib).
Step 4: Compute the utility-component of currents: The utility-
component of the neutral current (Ine) is given by the difference
between the measured neutral current (In) and the customer-
component estimated in Step 3; i.e., Ine = In - Inc. The current Ine flows
through Rc as well.
Step 5: Calculate the percentage contributions: The percentage
contributions of the utility and customer to the stray voltage can be
-94-
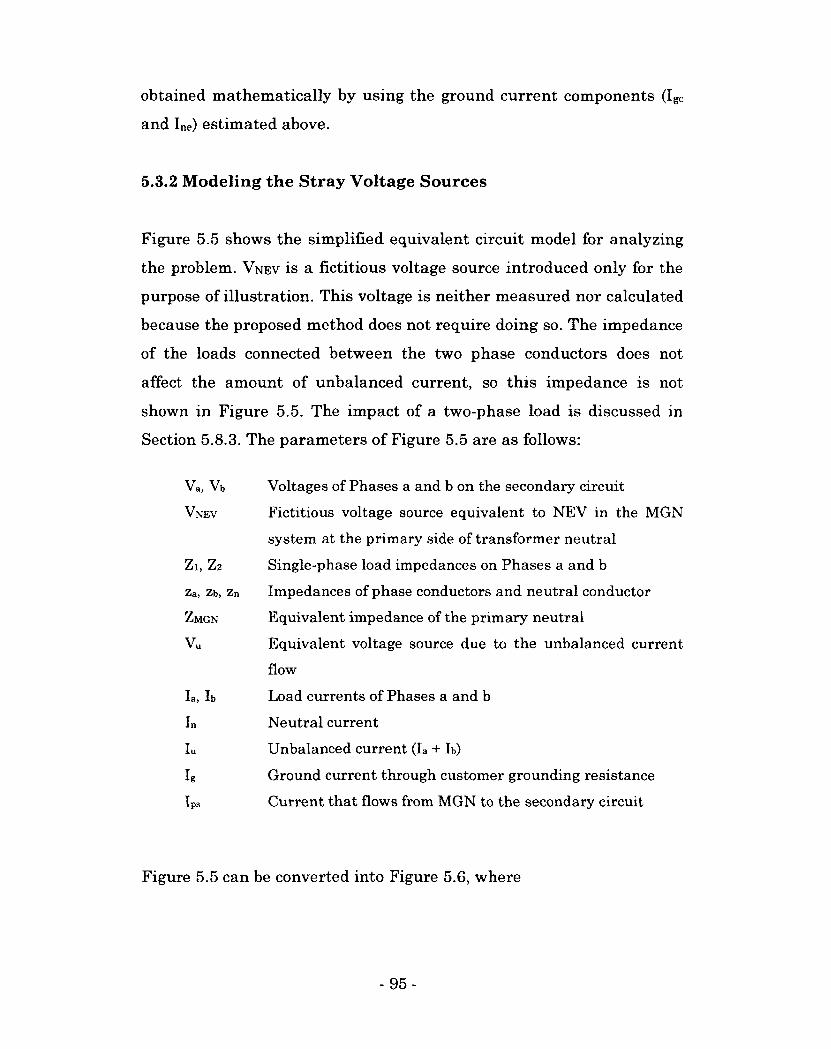
obtained mathematically by using the ground current components (Igc
and Ine) estimated above.
5.3.2 Modeling the Stray Voltage Sources
Figure 5.5 shows the simplified equivalent circuit model for analyzing
the problem. VNEV is a fictitious voltage source introduced only for the
purpose of illustration. This voltage is neither measured nor calculated
because the proposed method does not require doing so. The impedance
of the loads connected between the two phase conductors does not
affect the amount of unbalanced current, so this impedance is not
shown in Figure 5.5. The impact of a two-phase load is discussed in
Section 5.8.3. The parameters of Figure 5.5 are as follows:
Va, Vb Voltages of Phases a and b on the secondary circuit
VNEV Fictitious voltage source equivalent to NEV in the MGN
system at the primary side of transformer neutral
ZI, Z2 Single-phase load impedances on Phases a and b
za, Zb, zn Impedances of phase conductors and neutral conductor
ZMGN Equivalent impedance of the primary neutral
Vu Equivalent voltage source due to the unbalanced current
flow
la, lb Load currents of Phases a and b
In Neutral current
Iu Unbalanced current (Ia + lb)
Ig Ground current through customer grounding resistance
Ips Current that flows from MGN to the secondary circuit
Figure 5.5 can be converted into Figure 5.6, where
- 95-
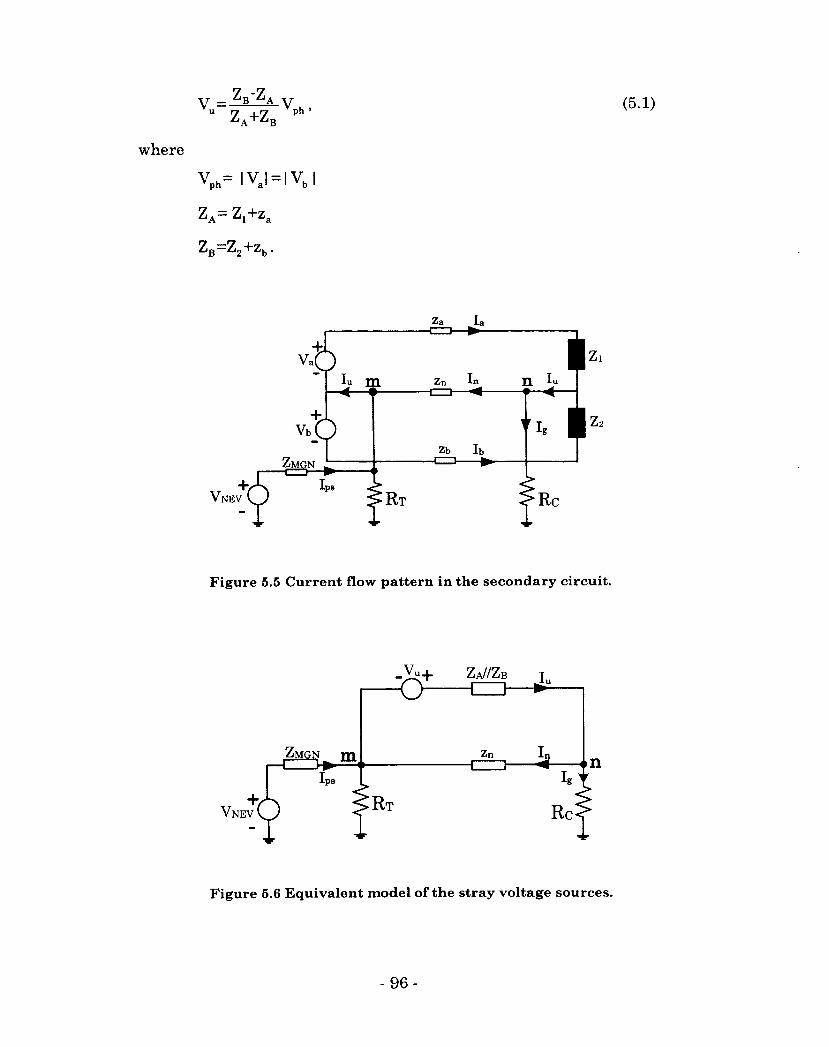
y - Zb'Za y (5 y
" ZA+ZB
where
VP H=IVJ = |VB |
ZA= Zi+za
^B—^2~*"Zb *
Za
Zn
ZMGN
VNEV RT RC
Figure 5.5 Current flow pattern in the secondary circuit.
ZMGN M
p®
-Vu+ ZA//ZB T -<>—tb—
Zn In
VNEV^P • RT Rc«
n
Figure 5.6 Equivalent model of the stray voltage sources.
- 96-
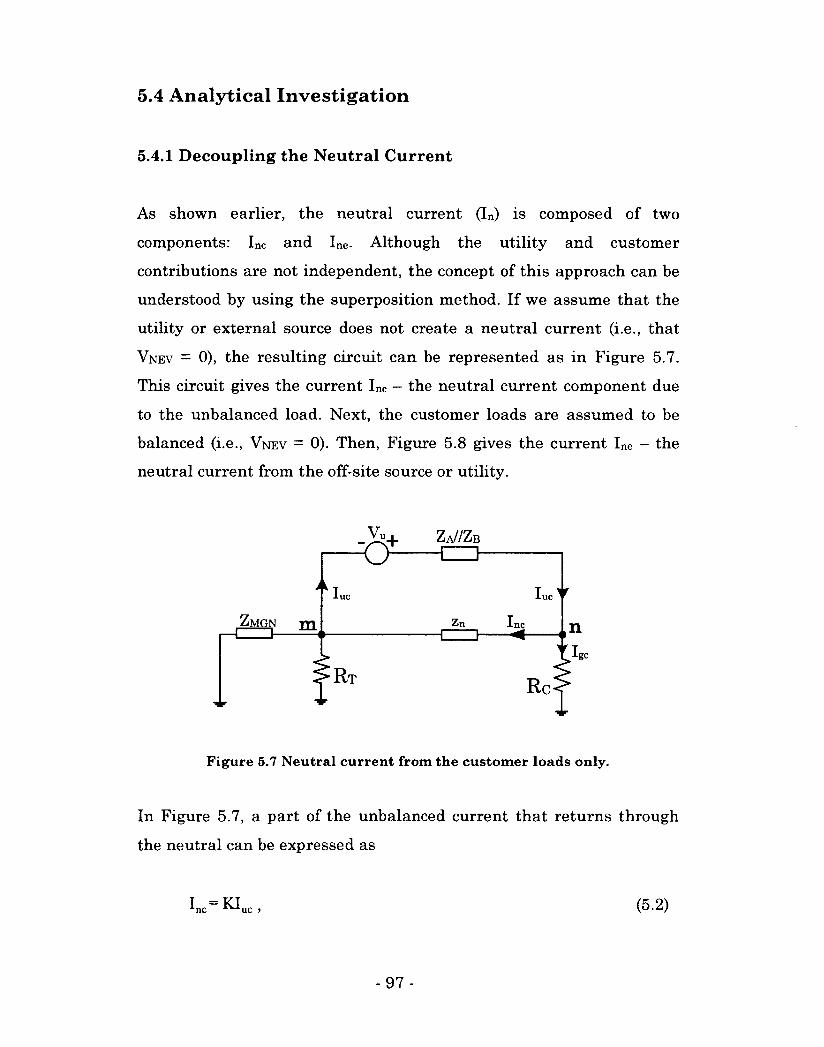
5.4 Analytical Investigation
5.4.1 Decoupling the Neutral Current
As shown earlier, the neutral current (In) is composed of two
components: Inc and Ine. Although the utility and customer
contributions are not independent, the concept of this approach can be
understood by using the superposition method. If we assume that the
utility or external source does not create a neutral current (i.e., that
VNEV = 0), the resulting circuit can be represented as in Figure 5.7.
This circuit gives the current Inc — the neutral current component due
to the unbalanced load. Next, the customer loads are assumed to be
balanced (i.e., VNEV = 0). Then, Figure 5.8 gives the current Ine - the
neutral current from the off-site source or utility.
ZA//ZB
UC
ZMGN m zn nc
RT RC
Figure 5.7 Neutral current from the customer loads only.
In Figure 5.7, a part of the unbalanced current that returns through
the neutral can be expressed as
I „c= KI U C ) (5.2)
- 97 -
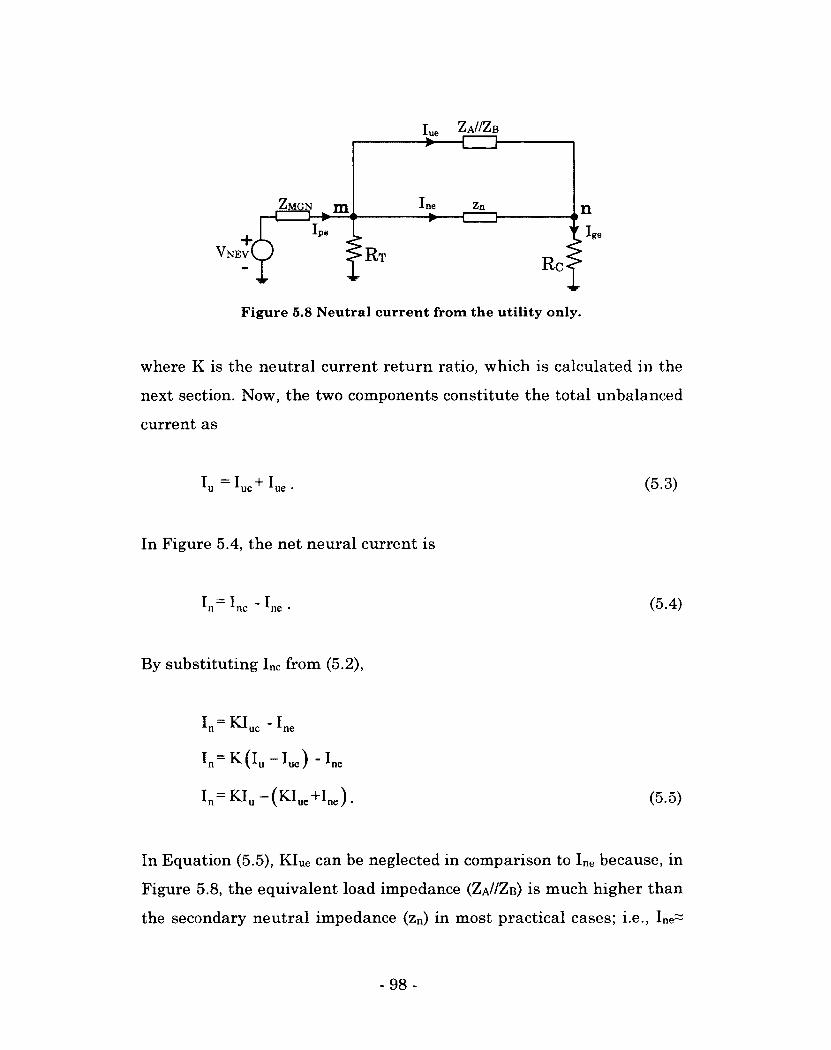
Iue ZA//ZB "• 1 I"
ZMGN m -*—•
4y VNEVV
I PB
Ine Zn n t Ige
•RT RC-
Figure 5.8 Neutral current from the utility only.
where K is the neutral current return ratio, which is calculated in the
next section. Now, the two components constitute the total unbalanced
current as
Iu luc+ ^ue (5.3)
In Figure 5.4, the net neural current is
^nc " ^ne (5.4)
By substituting Inc from (5.2),
T = KT - T An ^*uc ~ ne
K(I U Iue) " ̂ ne
I n =KI u - (KI u e +I n e ) . (5.5)
In Equation (5.5), KIUe can be neglected in comparison to Ine because, in
Figure 5.8, the equivalent load impedance (ZA//ZB) is much higher than
the secondary neutral impedance (zn) in most practical cases; i.e., Ine~
- 98 -
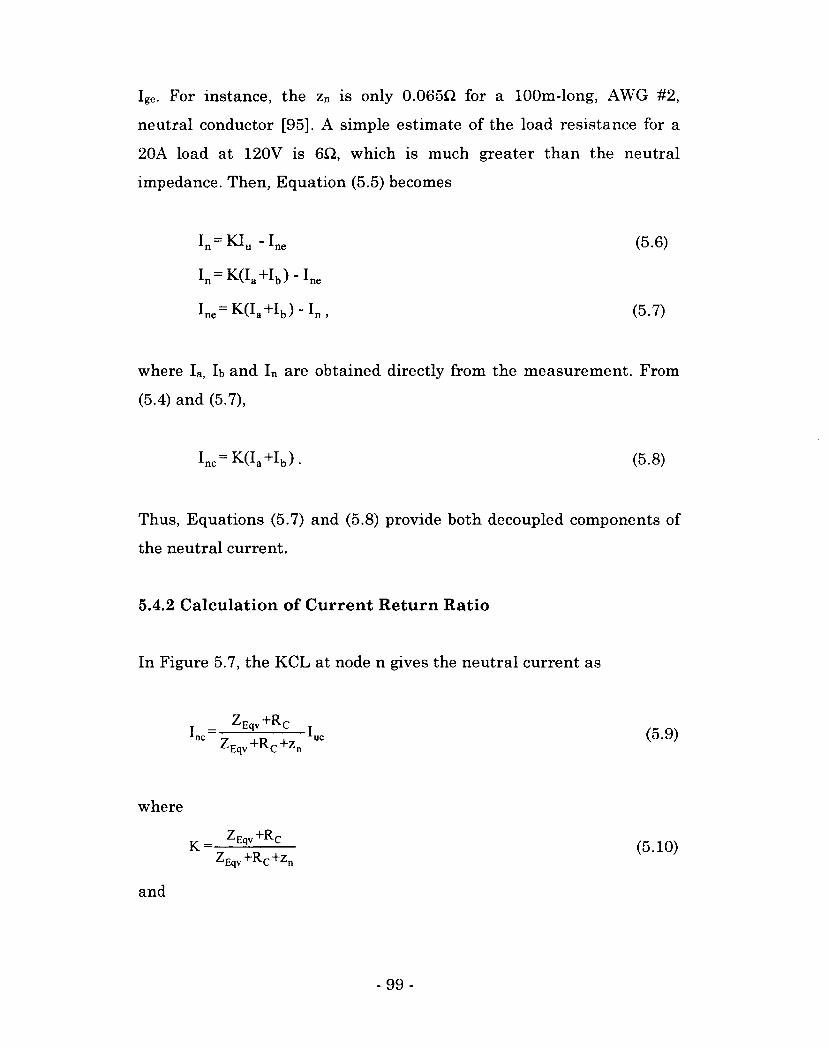
Ige. For instance, the zn is only 0.065C2 for a lOOm-long, AWG #2,
neutral conductor [95]. A simple estimate of the load resistance for a
20A load at 120V is 6£2, which is much greater than the neutral
impedance. Then, Equation (5.5) becomes
In = KJ u - I„e (5 .6)
I n= K(I a +I b ) - I n e
I n e =K(I a +I b ) - I n , (5 .7)
where Ia> lb and In are obtained directly from the measurement. From
(5.4) and (5.7),
I„ c =K(I a +I b ) . (5 .8)
Thus, Equations (5.7) and (5.8) provide both decoupled components of
the neutral current.
5.4.2 Calculation of Current Return Ratio
In Figure 5.7, the KCL at node n gives the neutral current as
Zpnu+Rr
+R +z <59) Eqv C n
where
K= ZEqv+RC ^ 1Q^
^Eqv+^C+Zn
and
- 99 -
- Zmgn^T 7 xD ^MGN
(5.11)
Equation (5.10) suggests that the ratio K can be close to 1 as zn is
generally small. To estimate K, for example, consider the neutral
network data given in Table 5.1. Field experience indicates that the
customer grounding resistance (Rc) can be as low as 1Q [38], In [49],
this resistance was found to be eight times smaller than the primary
neutral grounding resistance (Rgn).
Table 5.1 Neutral network parameters.
Parameters Values
Customer grounding resistance (Rc) 5£2
Transformer grounding resistance (RT) 15 Q
Primary neutral grounding resistance (Rgn) 15 a
The impedance of the secondary neutral (zn) The impedance of the secondary neutral (zn) 0.055 + j0.0365 CI
(AWG#2, 100m long) conductor 0.055 + j0.0365 CI
Impedance of the primary feeder's MGN neutral (Zn) 0.397+j0.912 Q/km
Grounding span of the MGN neutral (S) 75 m
The equivalent impedance of the MGN neutral can be calculated by
using Equation (3.9) (Chapter 3) as
^MGN =
ZMGN = 0.4424 + j0.2899 Q.
By using (5.8) and (5.9),
ZEqv = 0.4348 + j0.2734 Q.
K = 0.9896 - j0.0061 = 0.9897Z-0.350.
- 100-
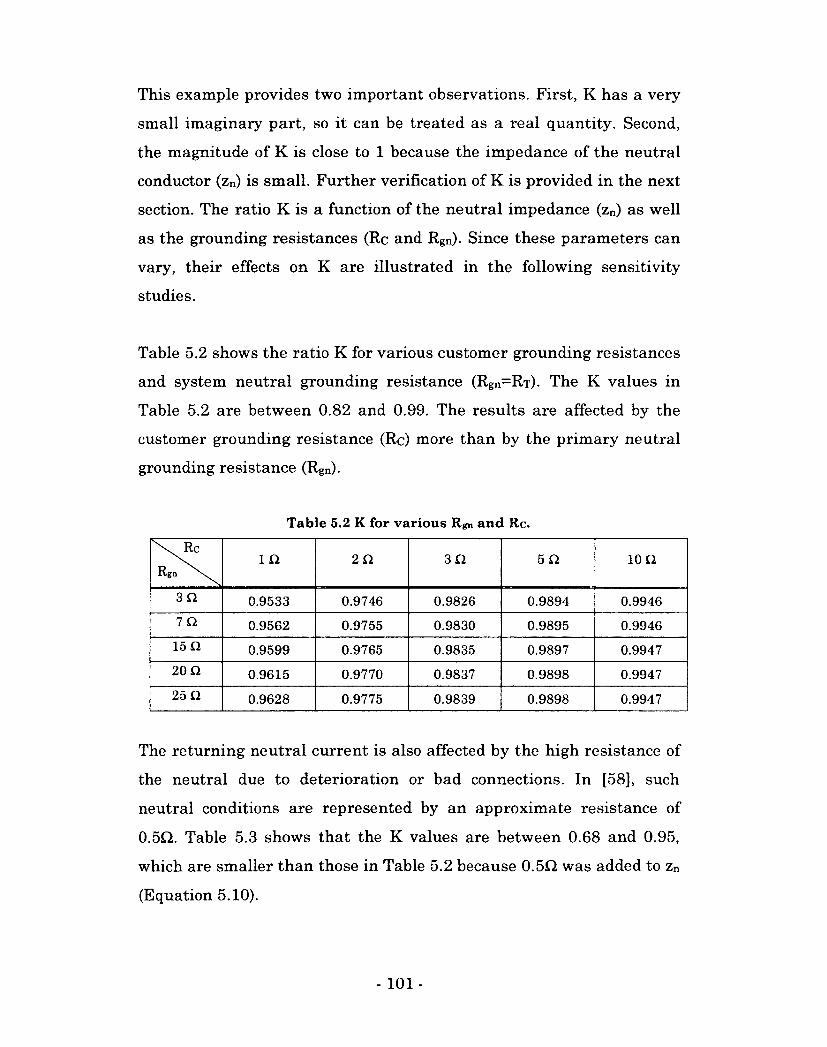
This example provides two important observations. First, K has a very
small imaginary part, so it can be treated as a real quantity. Second,
the magnitude of K is close to 1 because the impedance of the neutral
conductor (zn) is small. Further verification of K is provided in the next
section. The ratio K is a function of the neutral impedance (zn) as well
as the grounding resistances (Rc and Rgn). Since these parameters can
vary, their effects on K are illustrated in the following sensitivity
studies.
Table 5.2 shows the ratio K for various customer grounding resistances
and system neutral grounding resistance (Rgn=RT). The K values in
Table 5.2 are between 0.82 and 0.99. The results are affected by the
customer grounding resistance (Rc) more than by the primary neutral
grounding resistance (Rgn).
Table 5.2 K for various Rgn and Rc.
\ R c
Rgn 1 ft 2ft 3ft 5 ft 10 ft
3ft 0.9533 0.9746 0.9826 0.9894 0.9946
7 a 0.9562 0.9755 0.9830 0.9895 0.9946
15 n 0.9599 0.9765 0.9835 0.9897 0.9947
20 ft 0.9615 0.9770 0.9837 0.9898 0.9947
25 ft 0.9628 0.9775 0.9839 0.9898 0.9947
The returning neutral current is also affected by the high resistance of
the neutral due to deterioration or bad connections. In [58], such
neutral conditions are represented by an approximate resistance of
0.5Q. Table 5.3 shows that the K values are between 0.68 and 0.95,
which are smaller than those in Table 5.2 because 0.5Q was added to zn
(Equation 5.10).
- 101 -
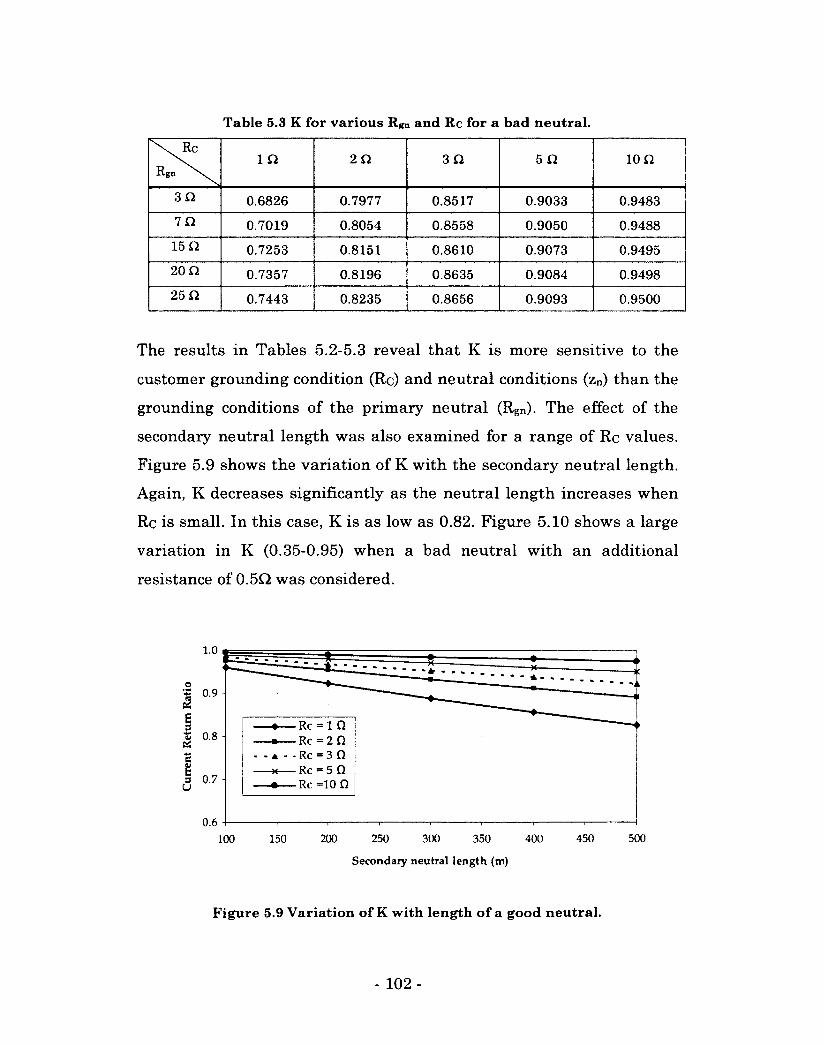
Table 5.3 K for various Rgn and Rc for a bad neutral.
\ R c
Rgn 1 n 2 Q 3 Q 5 n i o n
3Q 0.6826 0.7977 0.8517 0.9033 0.9483
1Q. 0.7019 0.8054 0.8558 0.9050 0.9488
15 n 0.7253 0.8151 0.8610 0.9073 0.9495
20 Q 0.7357 0.8196 0.8635 0.9084 0.9498
25 Q 0.7443 0.8235 0.8656 0.9093 0.9500
The results in Tables 5.2-5.3 reveal that K is more sensitive to the
customer grounding condition (Rc) and neutral conditions (zn) than the
grounding conditions of the primary neutral (Rgn). The effect of the
secondary neutral length was also examined for a range of Rc values.
Figure 5.9 shows the variation of K with the secondary neutral length.
Again, K decreases significantly as the neutral length increases when
Rc is small. In this case, K is as low as 0.82. Figure 5.10 shows a large
variation in K (0.35-0.95) when a bad neutral with an additional
resistance of 0.5Q was considered.
1.0
o 0.9
-Rc = 1 Q - Rc = 2 Q • Rc = 3 Q - Rc = 5 Q - Rc =10 Q
0.8
c t 3 0.7 u
0.6
450 200 250 300 350 400 500 150 100
Secondary neutral length (m)
Figure 5.9 Variation of K with length of a good neutral.
- 102 -
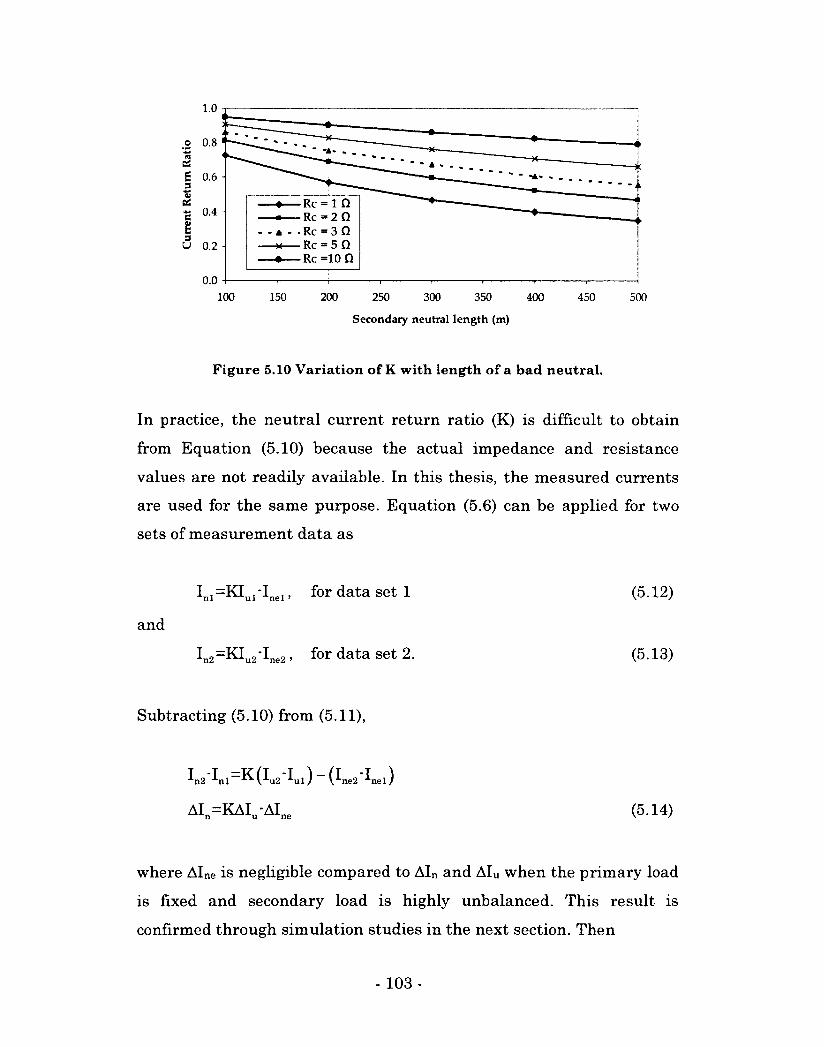
- - a - • Rc = 3 Q Rc = 5 Q
•— Rc =10 Q
100 150 200 250 300 350 400
Secondary neutral length (m)
450 500
Figure 5.10 Variation of K with length of a bad neutral.
In practice, the neutral current return ratio (K) is difficult to obtain
from Equation (5.10) because the actual impedance and resistance
values are not readily available. In this thesis, the measured currents
are used for the same purpose. Equation (5.6) can be applied for two
sets of measurement data as
Inl=KIul-Inel, for data set 1 (5.12)
and
In2=KIu2"Ine2 > for data Set 2- (5-13)
Subtracting (5.10) from (5.11),
^n2 ^nl—^(^2 ^ul) (^ne2 ^nel)
Aln=KAlu-Alne (5.14)
where Alne is negligible compared to AIn and AIU when the primary load
is fixed and secondary load is highly unbalanced. This result is
confirmed through simulation studies in the next section. Then
- 103 -
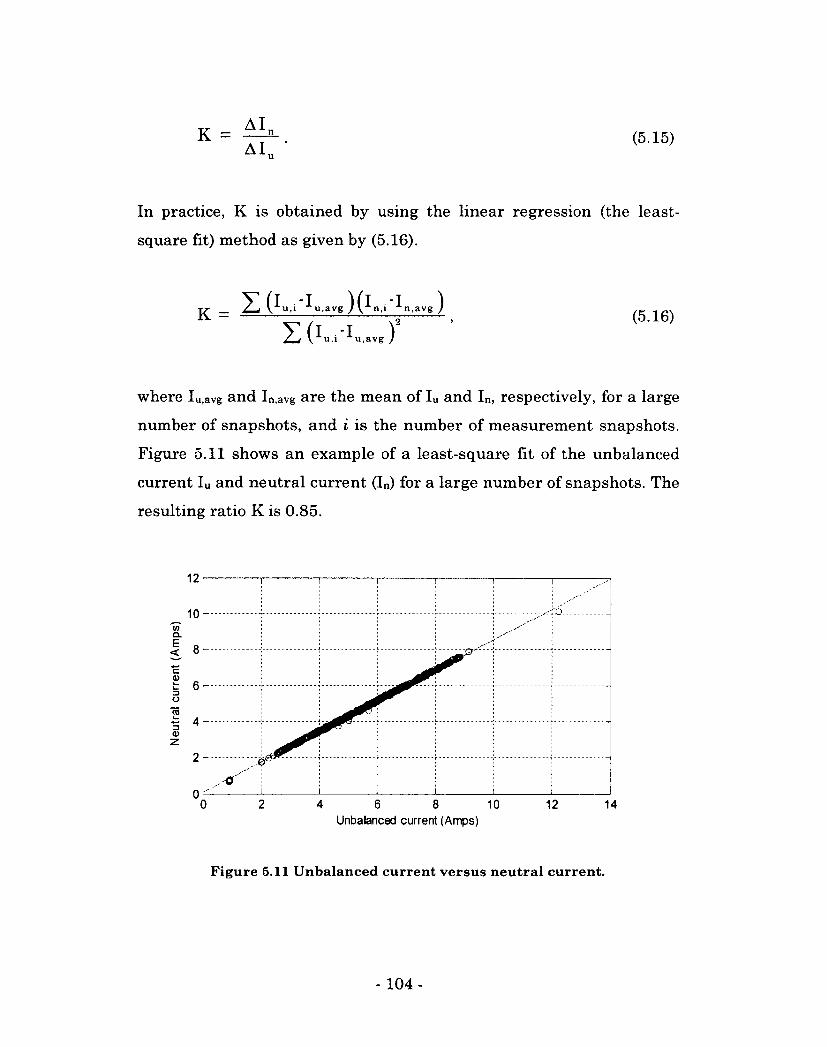
(5.15)
In practice, K is obtained by using the linear regression (the least-
square fit) method as given by (5.16).
where Iu,avg and In,avg are the mean of Iu and In, respectively, for a large
number of snapshots, and i is the number of measurement snapshots.
Figure 5.11 shows an example of a least-square fit of the unbalanced
current Iu and neutral current (In) for a large number of snapshots. The
resulting ratio K is 0.85.
(5.16)
12
10 c/> Q.
c a> 6
4
2
0 0 2 4 6 8 10
Unbalanced current (Amps) 12 14
Figure 5.11 Unbalanced current versus neutral current.
- 104-
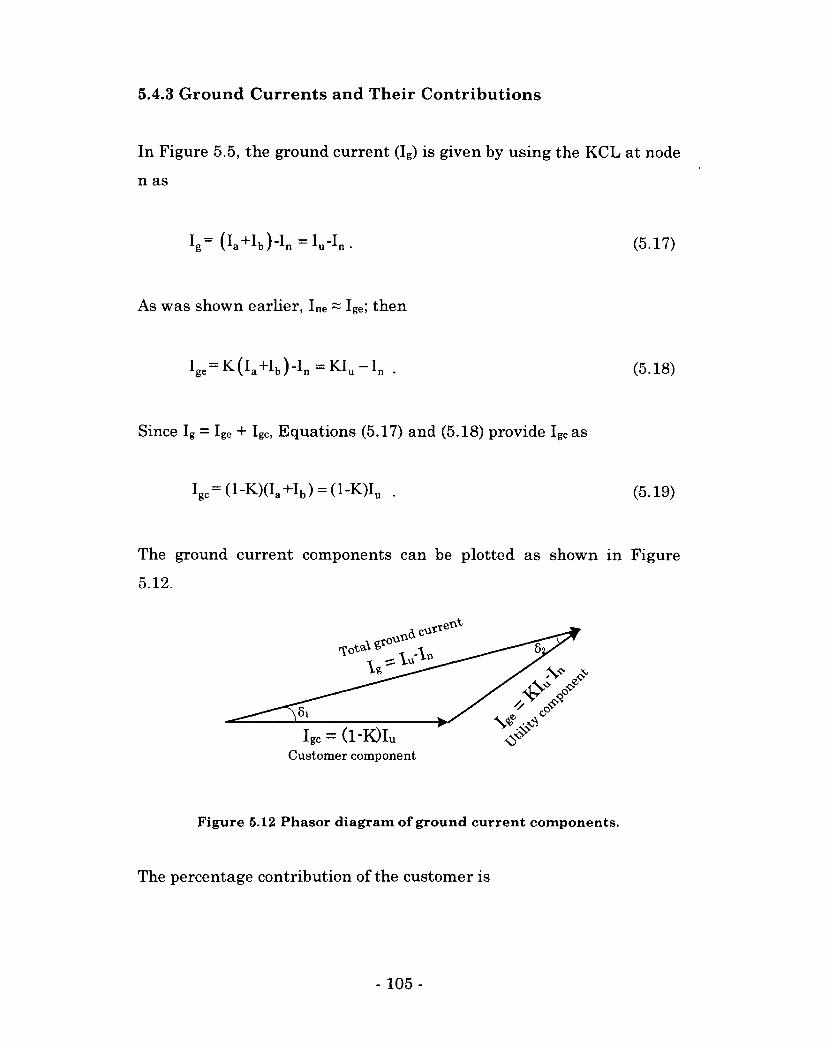
5.4.3 Ground Currents and Their Contributions
In Figure 5.5, the ground current (Ig) is given by using the KCL at node
n as
i.= (i,+ib)-i„=i„-in. (5.17)
As was shown earlier, Ine ~ Ige; then
I g e =K( l a +I b ) - I n =KI u - I„ . (5.18)
Since Ig = Ige + Igc, Equations (5.17) and (5.18) provide Igcas
Igc= (l-K)(Ia+Ib) = (1-K)IU . (5.19)
The ground current components can be plotted as shown in Figure
5.12.
V6
Igc = (l"K)lu
Customer component
Figure 5.12 Phasor diagram of ground current components.
The percentage contribution of the customer is
- 105
IIJcostf, | (l-K)I | F' =_i£ x 100% = —cos£, x 100%,
I I I I I - I I ' 6f ' 1 u n 1
(5.20)
and the percentage contribution of the utility is
11 I cos& F' = —e! * x 100% = cos£2 x 100%, (5.21) IIJ u n
where Fe and Fc are the percentage contributions of the primary
system or utility and the customer, respectively.
If K = 1 or Iu = 0, the Fc = 0 and Fe = 100%. These results mean that
when either all the customer load current returns through the neutral
or the customer loads are balanced, the utility is fully responsible for
the stray voltage. Similarly, K = 0 represents the case of a broken
secondary neutral so that In = 0. Then, Fe = 0 and Fc = 100%; i.e., the
customer is fully responsible for the stray voltage. In reality, 0<K<1
and Iu* 0. Therefore, both utility and customer contributions exist.
The contribution to the stray voltage will be same as that given by
(5.20) and (5.21) because the stray voltages at the neutral bus of the
customer service panel are simply obtained by multiplying the above
currents by the resistance Re-
Mathematically, the total stray voltage is Vng=IgRc ,
the stray voltage due to the customer is Vnc=IgcRc,
and the stray voltage due to the utility is Vne=IgeRc •
- 106-

5.5 Simulation Verifications
5.5.1 Simulation Study
In order to verify the analytical model and underlying assumptions
associated with the proposed method, simulations were performed in
MHLF by using the system shown in Figure 5.1 and the neutral
network parameters given in Table 5.1. The impedance models of the
loads with a power factor of 0.8 are provided in Tables 5.4-5.5.
Table 5.4 Customer loads and their impedance model.
Case Phase a Phase b Total Phase a Phase b
kVA kVA kVA Ru (£2) XLI (ST2) Rl2 (£"2) XL2 («)
1 5 5 10 2.304 1.728 2.304 1.728
2 6 4 10 1.920 1.440 2.880 2.160
3 7 3 10 1.646 1.234 3.840 2.880
4 8 2 10 1.440 1.080 5.760 4.320
5 9 1 10 1.280 0.960 11.520 8.640
Table 5.5 Feeder loads and their impedance model.
Feeder load RLF (F2) XLF (P.)
Load A-N 1.0 MVA 166.58 124.93
Load B-N 0.5 MVA 331.16 249.87
Load C-N 0.5 MVA 331.16 249.87
The currents obtained from the power flow simulation are shown in
Table 5.6.
- 107 -
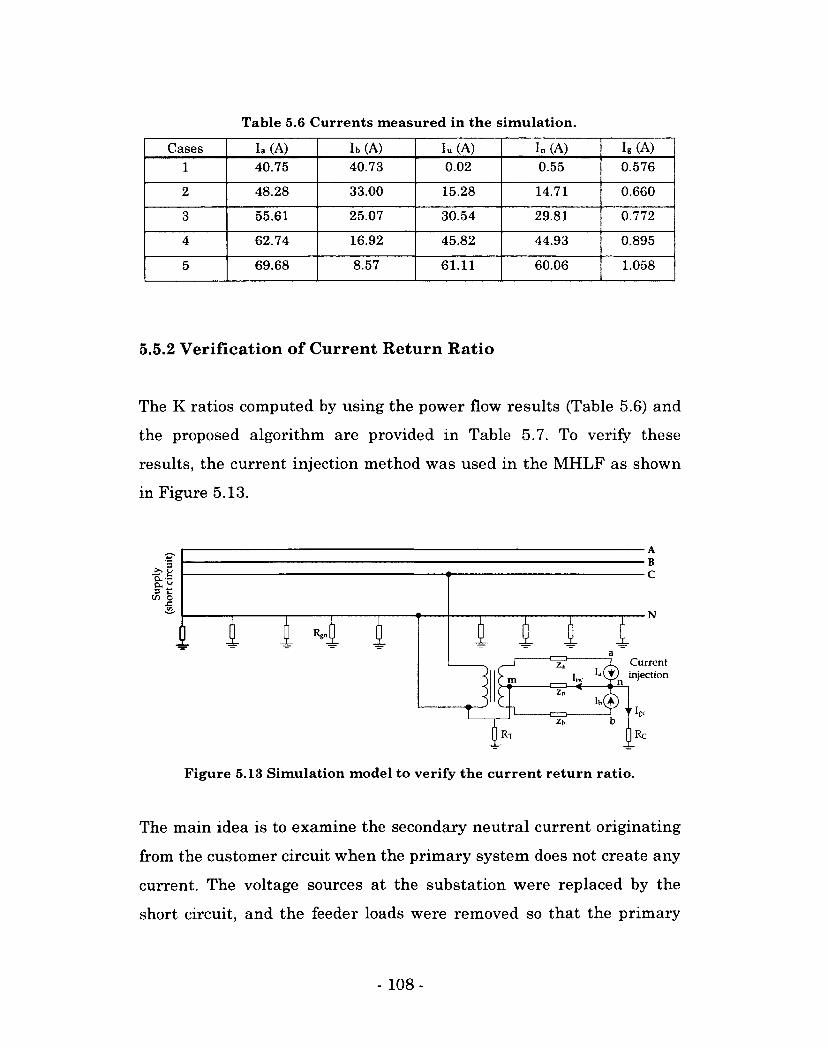
Table 5.6 Currents measured in the simulation.
Cases la (A) lb (A) lu (A) In (A) Ig (A)
1 40.75 40.73 0.02 0.55 0.576
2 48.28 33.00 15.28 14.71 0.660
3 55.61 25.07 30.54 29.81 0.772
4 62.74 16.92 45.82 44.93 0.895
5 69.68 8.57 61.11 60.06 1.058
5.5.2 Verification of Current Return Ratio
The K ratios computed by using the power flow results (Table 5.6) and
the proposed algorithm are provided in Table 5.7. To verify these
results, the current injection method was used in the MHLF as shown
in Figure 5.13.
CL -S
a t; C/> o
Current injection m
Figure 5.13 Simulation model to verify the current return ratio.
The main idea is to examine the secondary neutral current originating
from the customer circuit when the primary system does not create any
current. The voltage sources at the substation were replaced by the
short circuit, and the feeder loads were removed so that the primary
- 108-
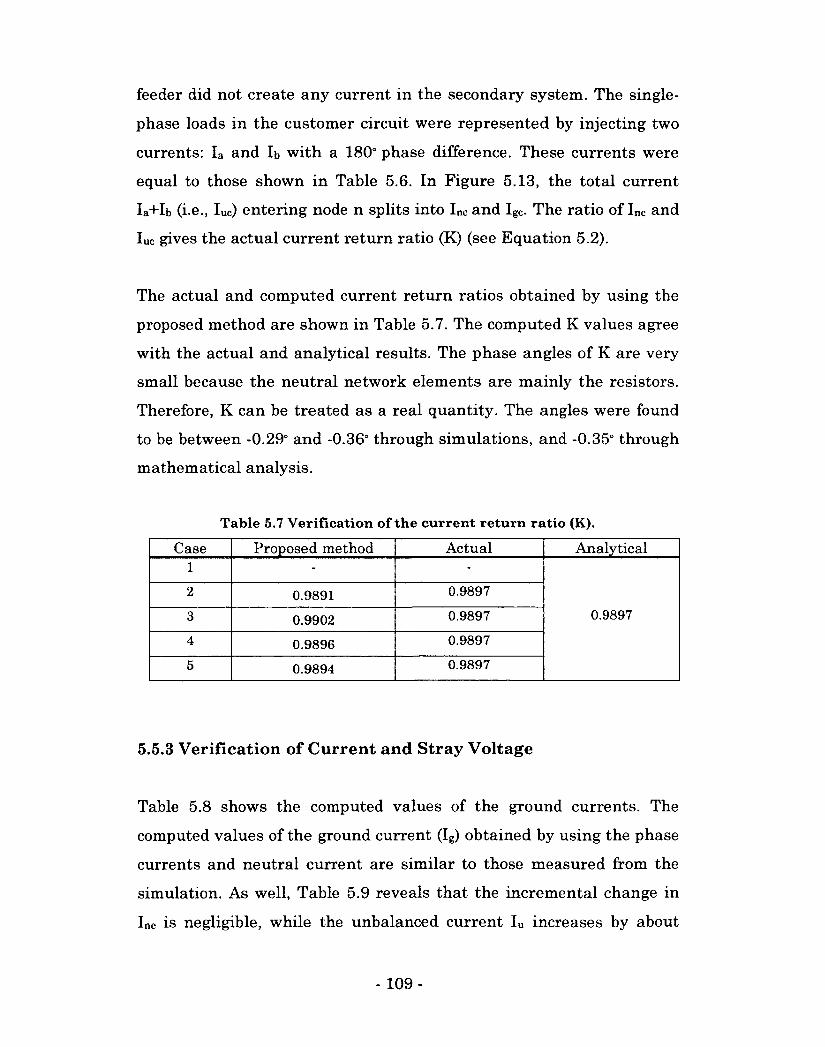
feeder did not create any current in the secondary system. The single-
phase loads in the customer circuit were represented by injecting two
currents: Ia and lb with a 180° phase difference. These currents were
equal to those shown in Table 5.6. In Figure 5.13, the total current
Ia+Ib (i e., Iuc) entering node n splits into Inc and Igc. The ratio of Inc and
Iuc gives the actual current return ratio (K) (see Equation 5.2).
The actual and computed current return ratios obtained by using the
proposed method are shown in Table 5.7. The computed K values agree
with the actual and analytical results. The phase angles of K are very
small because the neutral network elements are mainly the resistors.
Therefore, K can be treated as a real quantity. The angles were found
to be between -0.29° and -0.36° through simulations, and -0.35° through
mathematical analysis.
Table 5.7 Verification of the current return ratio (K).
Case Proposed method Actual Analytical 1 - -
2 0.9891 0.9897
3 0.9902 0.9897 0.9897
4 0.9896 0.9897
5 0.9894 0.9897
5.5.3 Verification of Current and Stray Voltage
Table 5.8 shows the computed values of the ground currents. The
computed values of the ground current (Ig) obtained by using the phase
currents and neutral current are similar to those measured from the
simulation. As well, Table 5.9 reveals that the incremental change in
Ine is negligible, while the unbalanced current Iu increases by about
- 109-
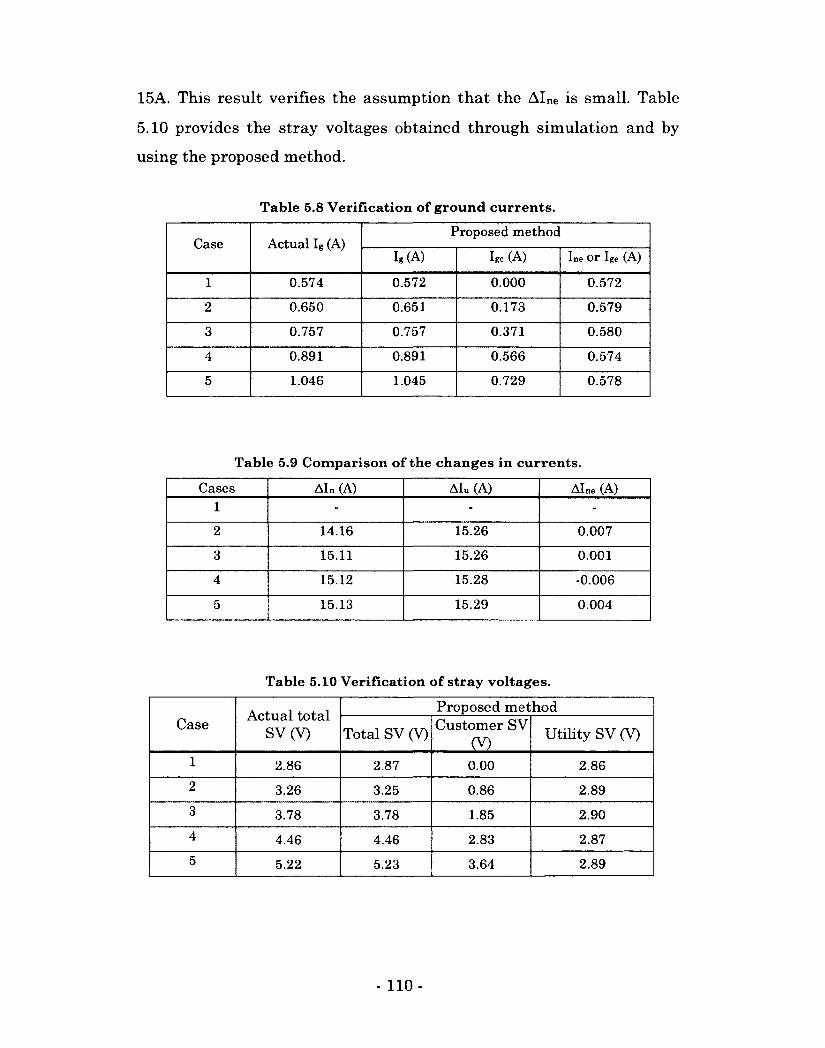
15A. This result verifies the assumption that the AIne is small. Table
5.10 provides the stray voltages obtained through simulation and by
using the proposed method.
Table 5.8 Verification of ground currents.
Case Actual Ig (A) Proposed method
Case Actual Ig (A) It (A) Igc (A) Ine Or Ige (A)
1 0.574 0.572 0.000 0.572
2 0.650 0.651 0.173 0.579
3 0.757 0.757 0.371 0.580
4 0.891 0.891 0.566 0.574
5 1.046 1.045 0.729 0.578
Table 5.9 Comparison of the changes in currents.
Cases AI„ (A) AIu (A) AIne (A)
1 - - -
2 14.16 15.26 0.007
3 15.11 15.26 0.001
4 15.12 15.28 -0.006
5 15.13 15.29 0.004
Table 5.10 Verification of stray voltages.
Case Actual total SV (V)
Proposed method Case Actual total
SV (V) Total SV (V) Customer SV (V) Utility SV (V)
1 2.86 2.87 0.00 2.86
2 3.26 3.25 0.86 2.89
3 3.78 3.78 1.85 2.90
4 4.46 4.46 2.83 2.87
5 5.22 5.23 3.64 2.89
- 110-
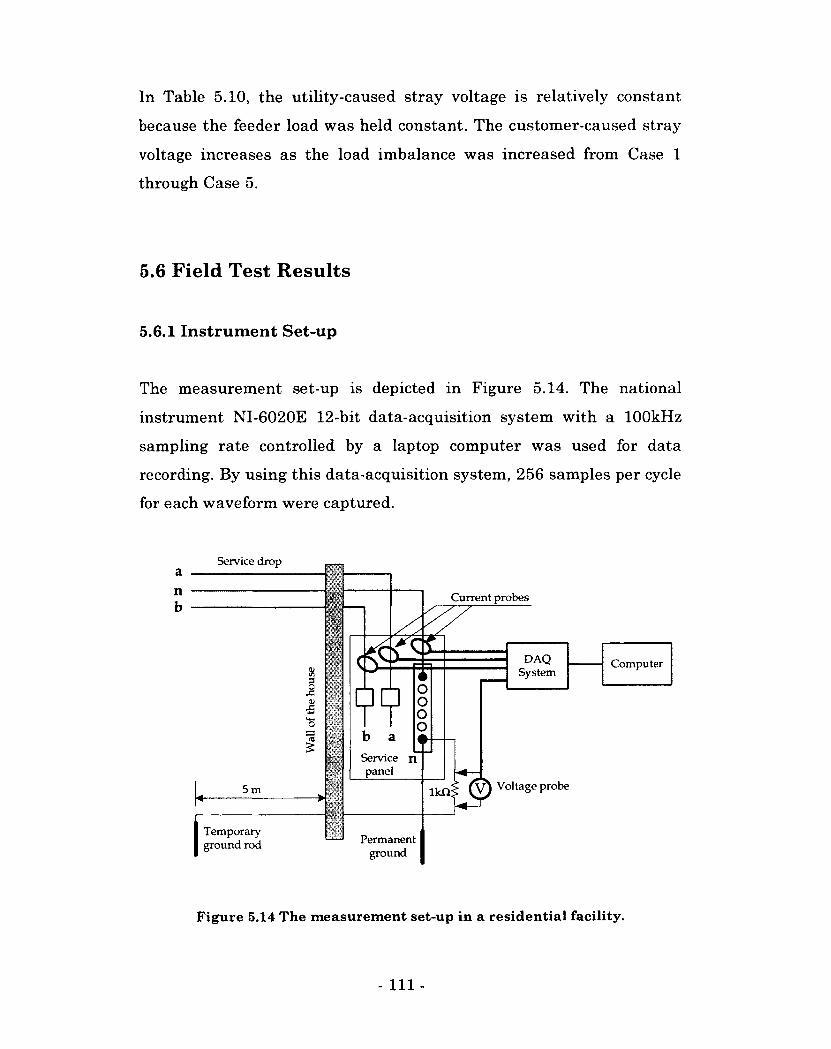
In Table 5.10, the utility-caused stray voltage is relatively constant
because the feeder load was held constant. The customer-caused stray
voltage increases as the load imbalance was increased from Case 1
through Case 5.
5.6 Field Test Results
5.6.1 Instrument Set-up
The measurement set-up is depicted in Figure 5.14. The national
instrument NI-6020E 12-bit data-acquisition system with a 100kHz
sampling rate controlled by a laptop computer was used for data
recording. By using this data-acquisition system, 256 samples per cycle
for each waveform were captured.
Service drop a n b
Current probes
DAQ System
Computer
S3
Service n panel
lkni fy) Voltage probe 5 m
Temporary ground rod Permanent
ground
Figure 5.14 The measurement set-up in a residential facility.
- Ill -
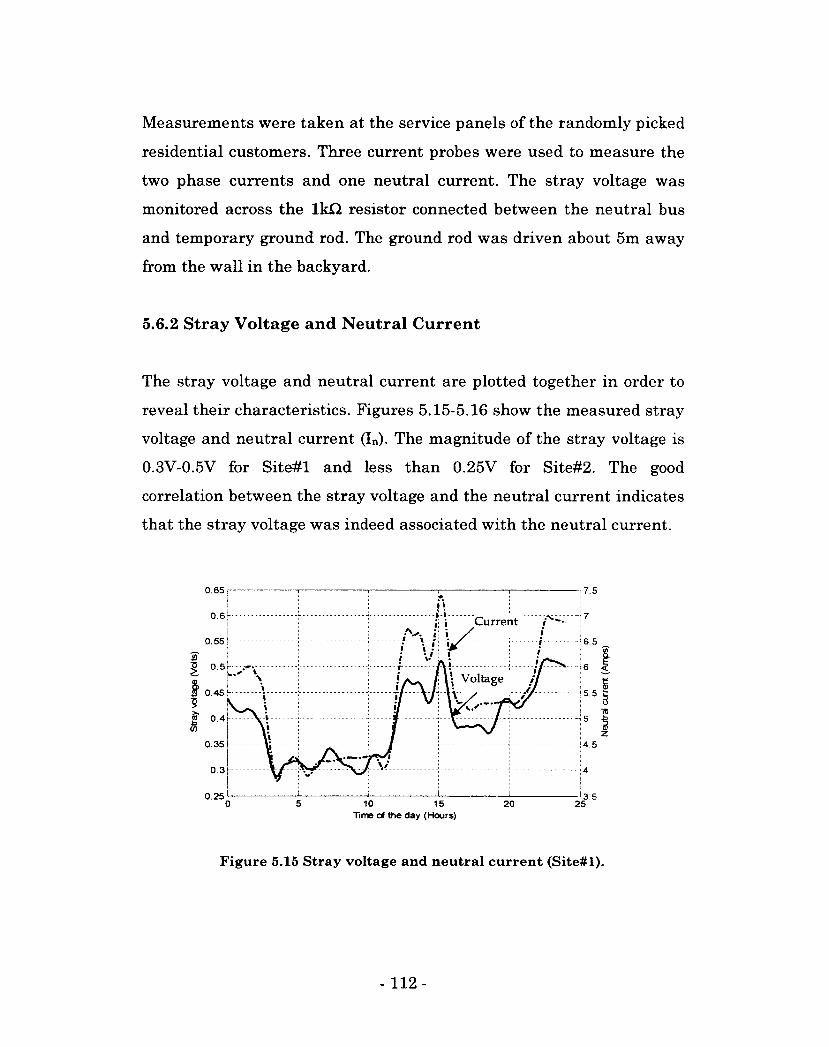
Measurements were taken at the service panels of the randomly picked
residential customers. Three current probes were used to measure the
two phase currents and one neutral current. The stray voltage was
monitored across the lkQ resistor connected between the neutral bus
and temporary ground rod. The ground rod was driven about 5m away
from the wall in the backyard.
5.6.2 Stray Voltage and Neutral Current
The stray voltage and neutral current are plotted together in order to
reveal their characteristics. Figures 5.15-5.16 show the measured stray
voltage and neutral current (In). The magnitude of the stray voltage is
0.3V-0.5V for Site#l and less than 0.25V for Site#2. The good
correlation between the stray voltage and the neutral current indicates
that the stray voltage was indeed associated with the neutral current.
0.65 7.5
Current
0.55 b 6.5
£ I
Voltage 0.45 h 5.5
0 35 4.5
0.3
0.25 3.5 10 15
Time o# the day (Hours) 20 25
Figure 5.15 Stray voltage and neutral current (Site#l).
- 112-
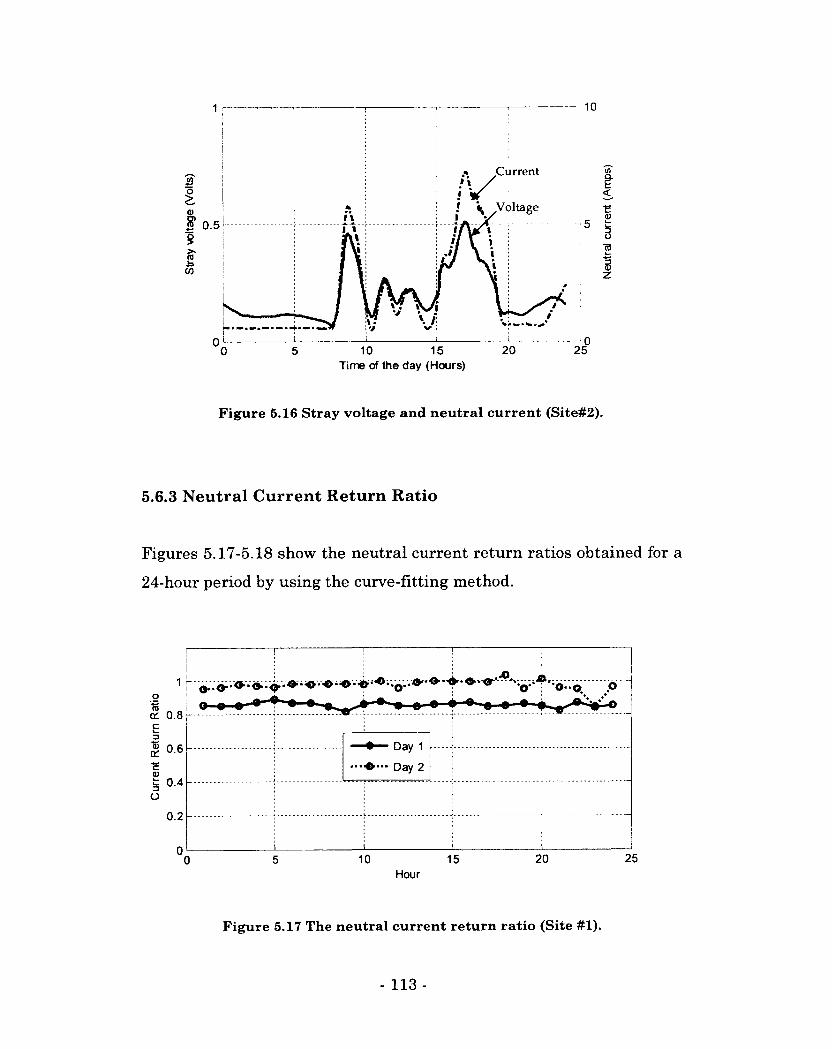
Current
Time of the day (Hours)
Figure 5.16 Stray voltage and neutral current (Site#2).
5.6.3 Neutral Current Return Ratio
Figures 5.17-5.18 show the neutral current return ratios obtained for a
24-hour period by using the curve-fitting method.
* Day 1
• •••©— Day 2
* Day 1
• •••©— Day 2
10 15 Hour
20 25
Figure 5.17 The neutral current return ratio (Site #1).
- 113 -
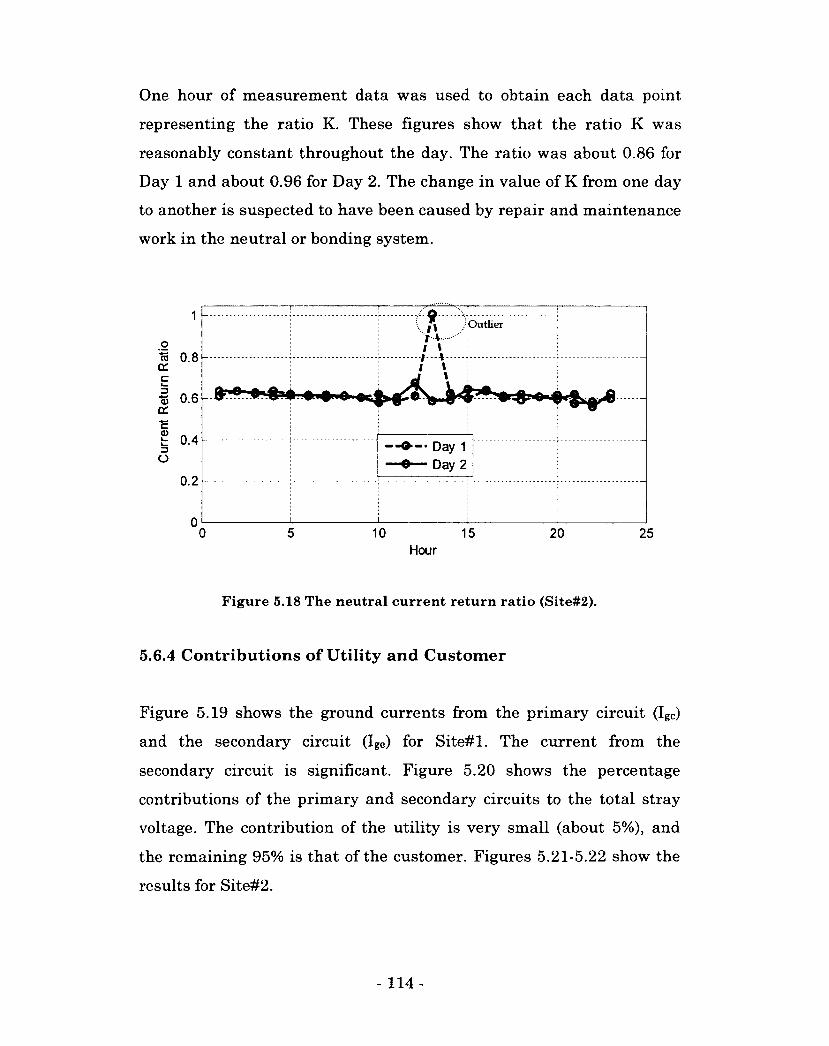
One hour of measurement data was used to obtain each data point
representing the ratio K. These figures show that the ratio K was
reasonably constant throughout the day. The ratio was about 0.86 for
Day 1 and about 0.96 for Day 2. The change in value of K from one day
to another is suspected to have been caused by repair and maintenance
work in the neutral or bonding system.
1
0 to 0.8 01 C
I 0.6 cc
t 0.4 3 o
0.2
0 0 5 10 15 20 25
Hour
Figure 5.18 The neutral current return ratio (Site#2).
5.6.4 Contributions of Utility and Customer
Figure 5.19 shows the ground currents from the primary circuit (Igc)
and the secondary circuit (Ige) for Site#l. The current from the
secondary circuit is significant. Figure 5.20 shows the percentage
contributions of the primary and secondary circuits to the total stray
voltage. The contribution of the utility is very small (about 5%), and
the remaining 95% is that of the customer. Figures 5.21-5.22 show the
results for Site#2.
T 7 M •-l \ • 1
Outlier
1 * J \
—<>•-• Day 1
O Day 2
- 114-
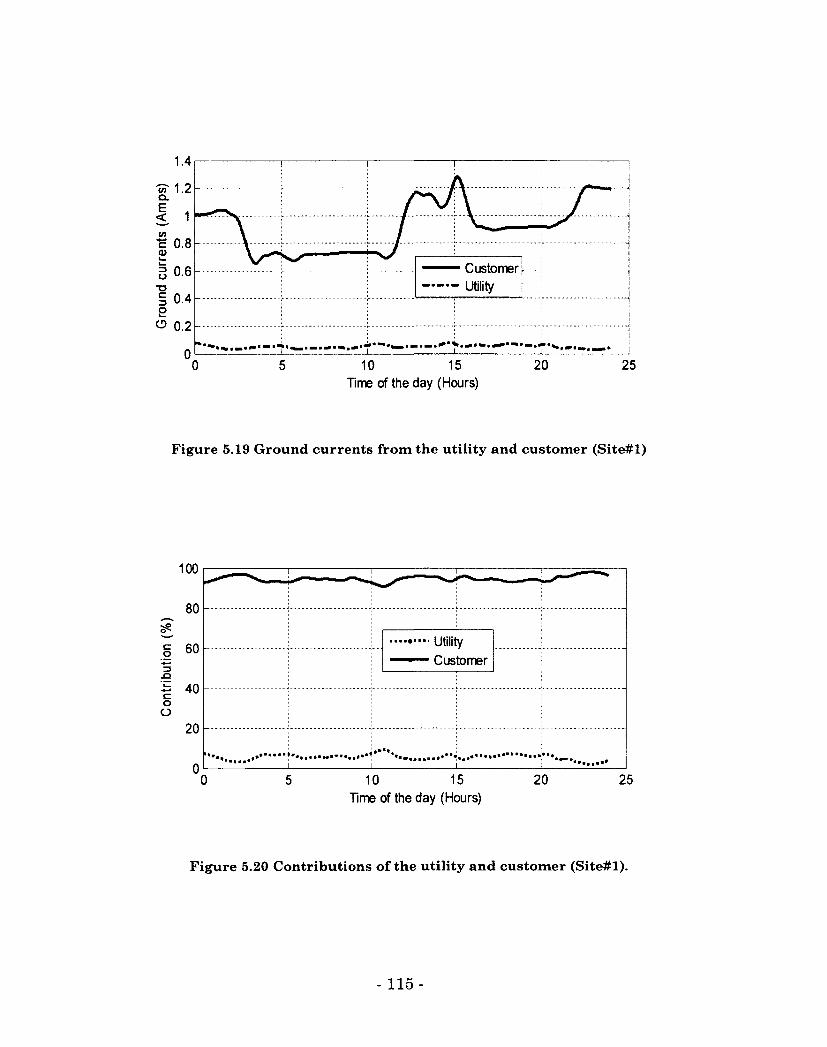
1.4
lo' 1.2 CL
I 1 •w* to c 0.8 ©
o T3 c 3 o
0.6
0.4
O 0.2
0
\ r \ / ^ / V
— Customer — Customer
10 15
Time of the day (Hours)
20 25
Figure 5.19 Ground currents from the utility and customer (Site#l)
3 XI c o O
100
80
60
40
20
0
—•••• Utility
Customer
—•••• Utility
Customer
10 15
Time of the day (Hours)
20 25
Figure 5.20 Contributions of the utility and customer (Site#l).
- 115-
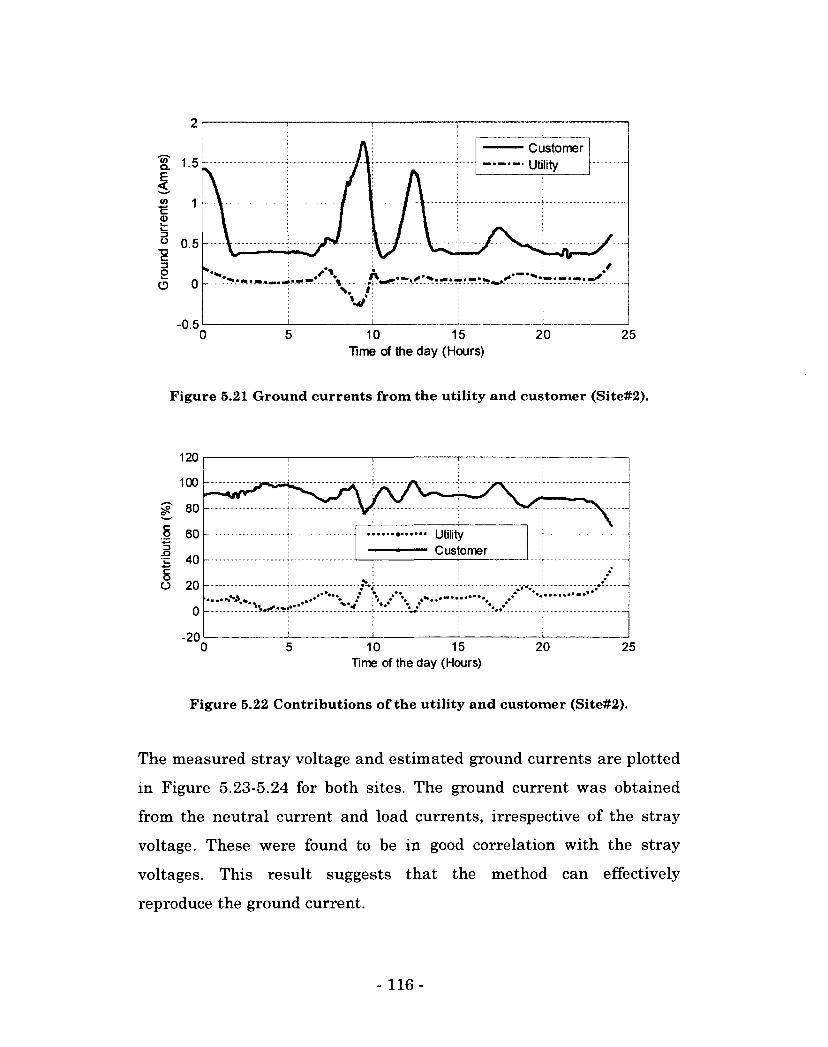
• Customer
• Utility (/) Q.
CO * a> L—
3 o "S 3 s o
-0.5 20
Time of the day (Hours)
Figure 5.21 Ground currents from the utility and customer (Site#2).
120
100
g. 80
1 60 3 .Q
'u. 40 1 o 20
0
-20
rW.-j"*'
Utility • Customer
/ *. A "'-f ; •»* • • • ••• • »
10 15 Time of the day (Hours)
20 25
Figure 5.22 Contributions of the utility and customer (Site#2).
The measured stray voltage and estimated ground currents are plotted
in Figure 5.23-5.24 for both sites. The ground current was obtained
from the neutral current and load currents, irrespective of the stray
voltage. These were found to be in good correlation with the stray
voltages. This result suggests that the method can effectively
reproduce the ground current.
- 116-
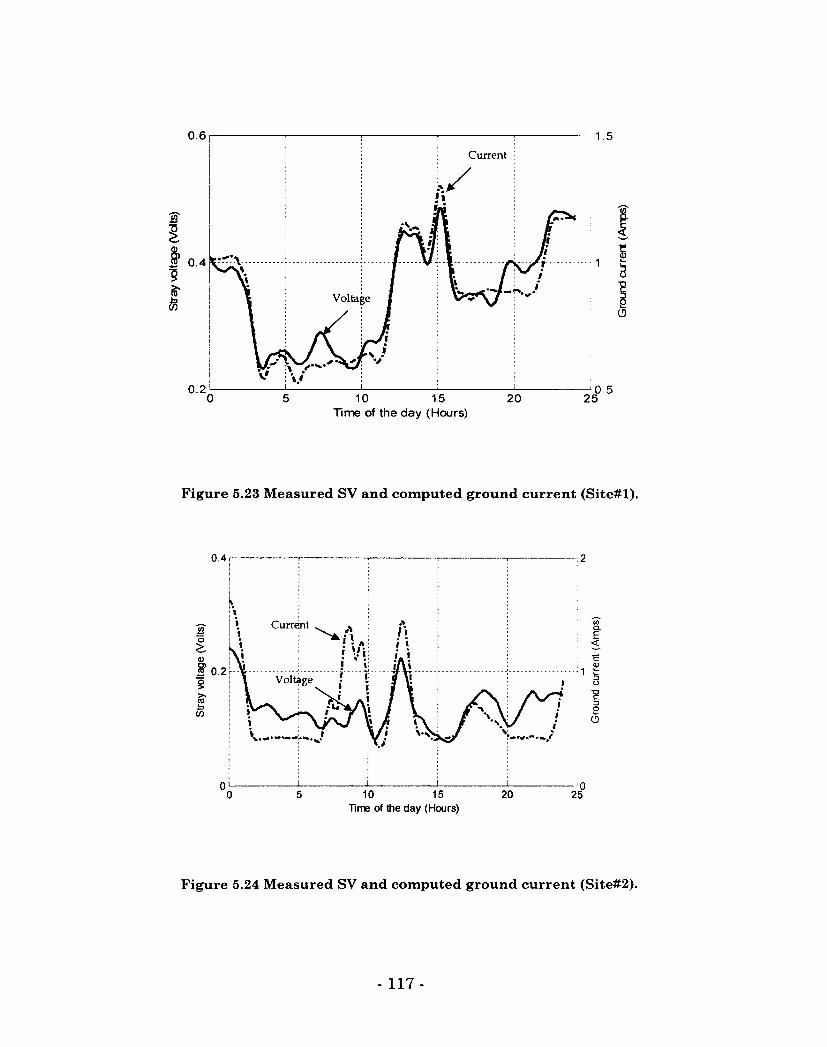
0.6
Current
Voltage
0.2 0.5 20 25
Time of the day (Hours)
Figure 5.23 Measured SV and computed ground current (Site#l).
Current
Voltige
Time of the day (Hours)
Figure 5.24 Measured SV and computed ground current (Site#2).
- 117 -
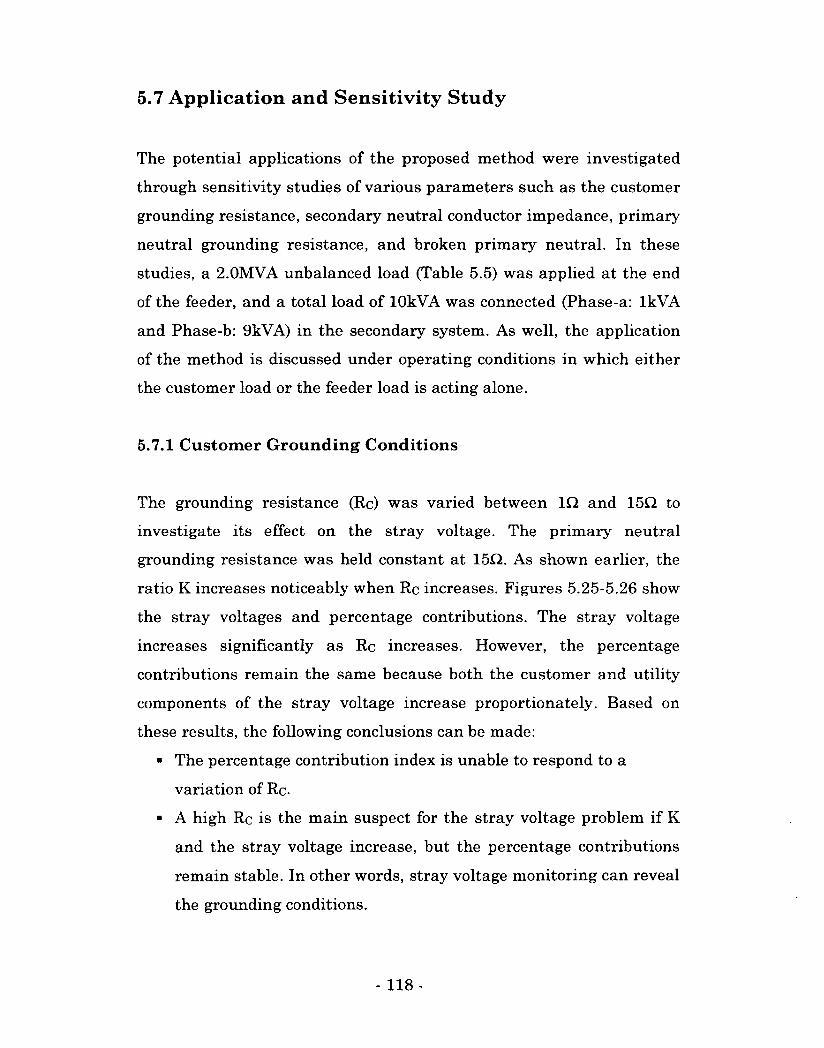
5.7 Application and Sensitivity Study
The potential applications of the proposed method were investigated
through sensitivity studies of various parameters such as the customer
grounding resistance, secondary neutral conductor impedance, primary
neutral grounding resistance, and broken primary neutral. In these
studies, a 2.0MVA unbalanced load (Table 5.5) was applied at the end
of the feeder, and a total load of lOkVA was connected (Phase-a: IkVA
and Phase-b: 9kVA) in the secondary system. As well, the application
of the method is discussed under operating conditions in which either
the customer load or the feeder load is acting alone.
5.7.1 Customer Grounding Conditions
The grounding resistance (Rc) was varied between 1Q and 15Q to
investigate its effect on the stray voltage. The primary neutral
grounding resistance was held constant at 15£2. As shown earlier, the
ratio K increases noticeably when Rc increases. Figures 5.25-5.26 show
the stray voltages and percentage contributions. The stray voltage
increases significantly as Rc increases. However, the percentage
contributions remain the same because both the customer and utility
components of the stray voltage increase proportionately. Based on
these results, the following conclusions can be made:
• The percentage contribution index is unable to respond to a
variation of Rc-
• A high Rc is the main suspect for the stray voltage problem if K
and the stray voltage increase, but the percentage contributions
remain stable. In other words, stray voltage monitoring can reveal
the grounding conditions.
- 118-
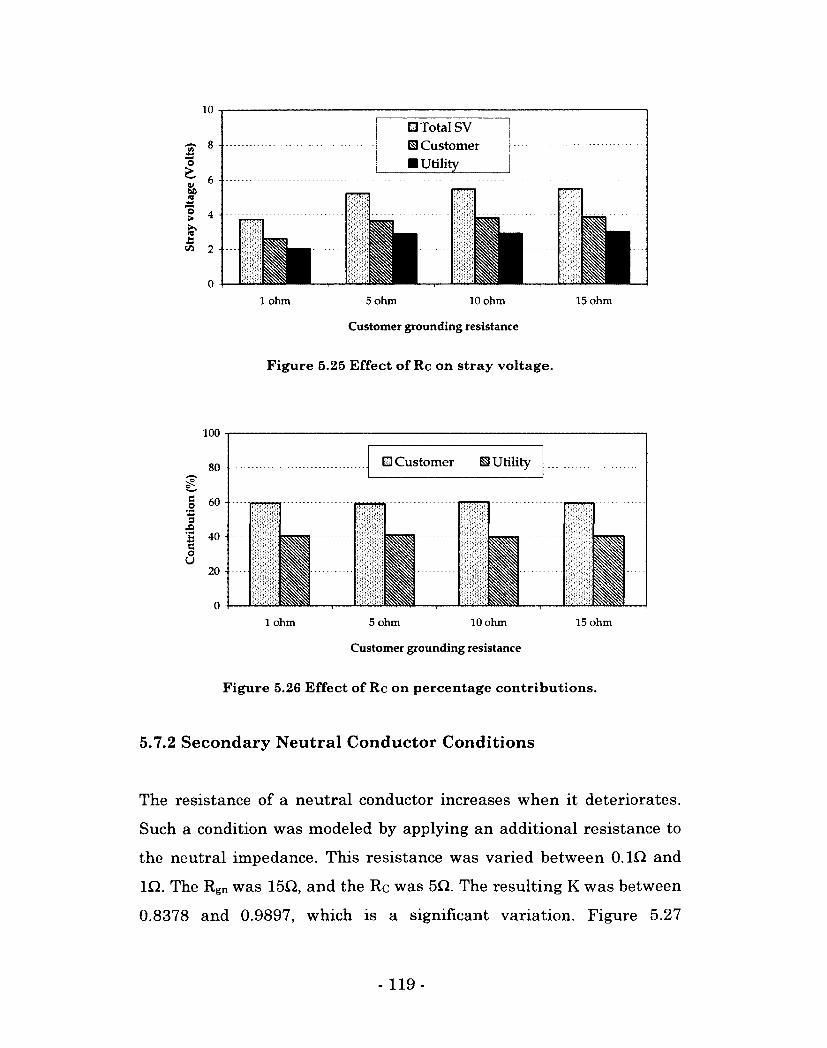
10
^ 8
0) bfi 2 w** o > ra £ c/5
1 ohm
E3 Total SV • Customer • Utility
5 ohm 10 ohm
Customer grounding resistance
15 ohm
Figure 5.25 Effect of Rc on stray voltage.
e _o s Xt '£ G O u
100
80
60 -
40 -
20 -
ED Customer E3 Utility
1 ohm 5 ohm 10 ohm
Customer grounding resistance
15 ohm
Figure 5.26 Effect of Rc on percentage contributions.
5.7.2 Secondary Neutral Conductor Conditions
The resistance of a neutral conductor increases when it deteriorates.
Such a condition was modeled by applying an additional resistance to
the neutral impedance. This resistance was varied between O.lil and
ID. The Rgn was 15Q, and the Rc was 5Q. The resulting K was between
0.8378 and 0.9897, which is a significant variation. Figure 5.27
- 119 -
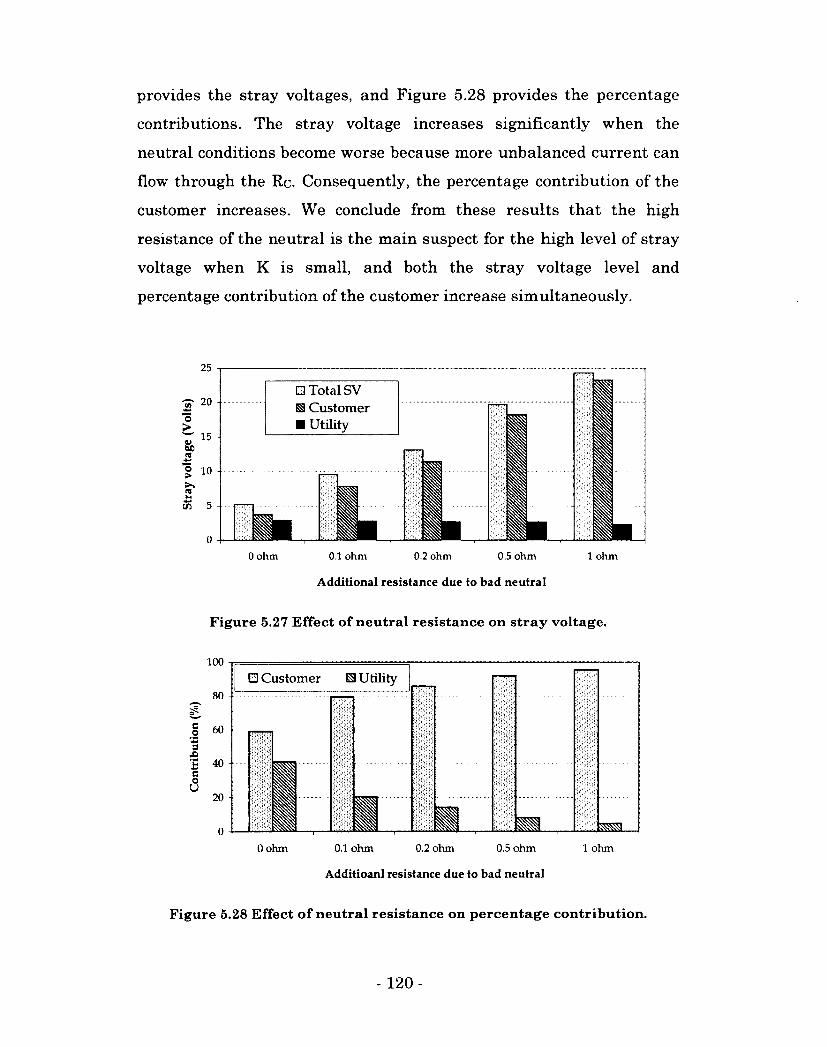
provides the stray voltages, and Figure 5.28 provides the percentage
contributions. The stray voltage increases significantly when the
neutral conditions become worse because more unbalanced current can
flow through the Rc. Consequently, the percentage contribution of the
customer increases. We conclude from these results that the high
resistance of the neutral is the main suspect for the high level of stray
voltage when K is small, and both the stray voltage level and
percentage contribution of the customer increase simultaneously.
25
• Total SV S3 Customer • Utility
0 ohm 0.1 ohm 0.2 ohm 0.5 ohm
Additional resistance due to bad neutral
1 ohm
Figure 5.27 Effect of neutral resistance on stray voltage.
100
80
60
40
20
0
c o •B 3 Xl £ C o U
E3 Customer ^ Utility
0 ohm 0.1 ohm 0.2 ohm 0.5 ohm
Additioanl resistance due to bad neutral
1 ohm
Figure 5.28 Effect of neutral resistance on percentage contribution.
- 120-
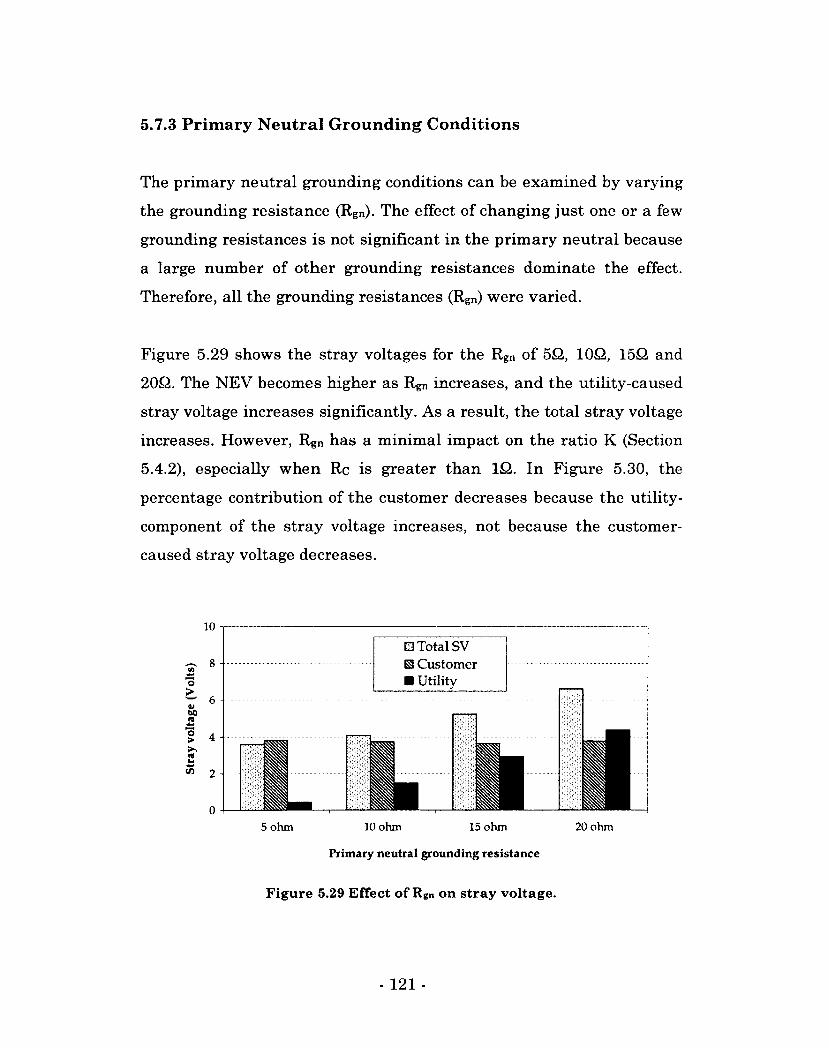
5.7.3 Primary Neutral Grounding Conditions
The primary neutral grounding conditions can be examined by varying
the grounding resistance (Rgn). The effect of changing just one or a few
grounding resistances is not significant in the primary neutral because
a large number of other grounding resistances dominate the effect.
Therefore, all the grounding resistances (Rgn) were varied.
Figure 5.29 shows the stray voltages for the Rgn of 5Q, 10£2, 15Q and
20Q. The NEV becomes higher as Rgn increases, and the utility-caused
stray voltage increases significantly. As a result, the total stray voltage
increases. However, Rgn has a minimal impact on the ratio K (Section
5.4.2), especially when Rc is greater than 1Q. In Figure 5.30, the
percentage contribution of the customer decreases because the utility-
component of the stray voltage increases, not because the customer-
caused stray voltage decreases.
10
o CO 8
• Total SV E3 Customer • Utility
5 ohm 10 ohm 15 ohm 20 ohm
Primary neutral grounding resistance
Figure 5.29 Effect of Rgn on stray voltage.
- 121 -
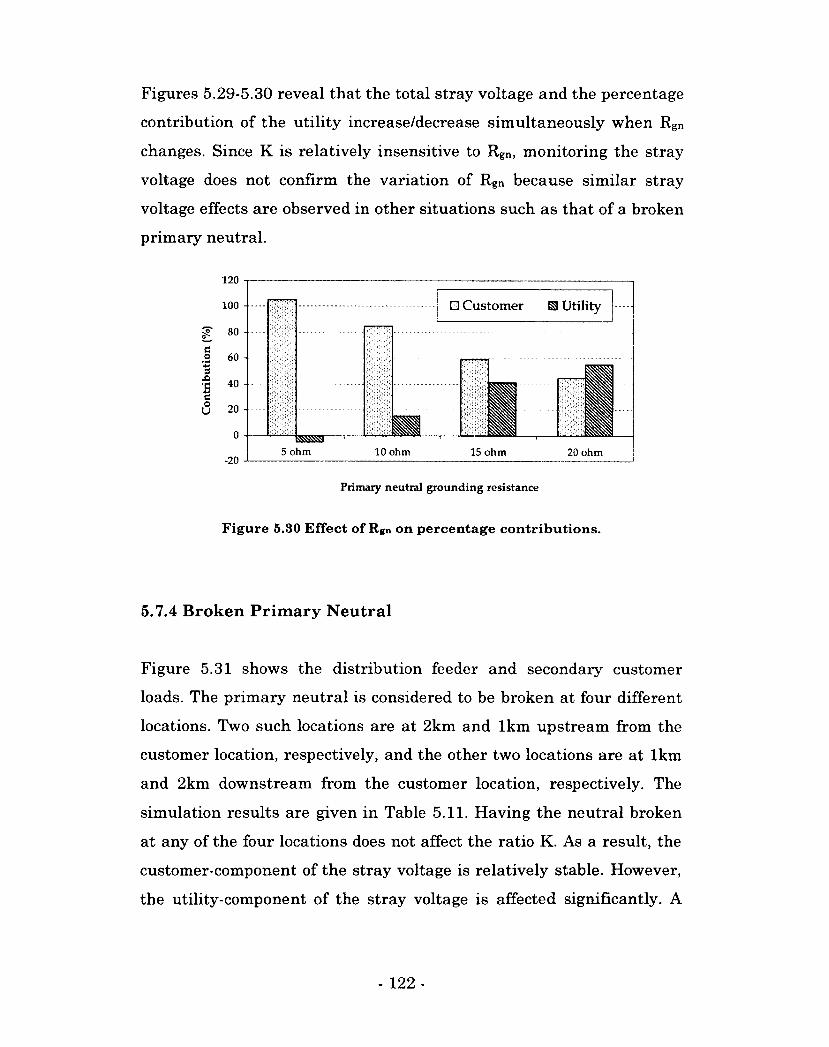
Figures 5.29-5.30 reveal that the total stray voltage and the percentage
contribution of the utility increase/decrease simultaneously when Rgn
changes. Since K is relatively insensitive to Rgn, monitoring the stray
voltage does not confirm the variation of Rgn because similar stray
voltage effects are observed in other situations such as that of a broken
primary neutral.
120
100
2 80
.2 60
I -<3 20
0
-20
Figure 5.30 Effect of Rgn on percentage contributions.
• Customer Utility
SSS5ST 5 ohm 10 ohm 15 ohm 20 ohm
Primary neutral grounding resistance
5.7.4 Broken Primary Neutral
Figure 5.31 shows the distribution feeder and secondary customer
loads. The primary neutral is considered to be broken at four different
locations. Two such locations are at 2km and 1km upstream from the
customer location, respectively, and the other two locations are at 1km
and 2km downstream from the customer location, respectively. The
simulation results are given in Table 5.11. Having the neutral broken
at any of the four locations does not affect the ratio K. As a result, the
customer-component of the stray voltage is relatively stable. However,
the utility-component of the stray voltage is affected significantly. A
- 122 -
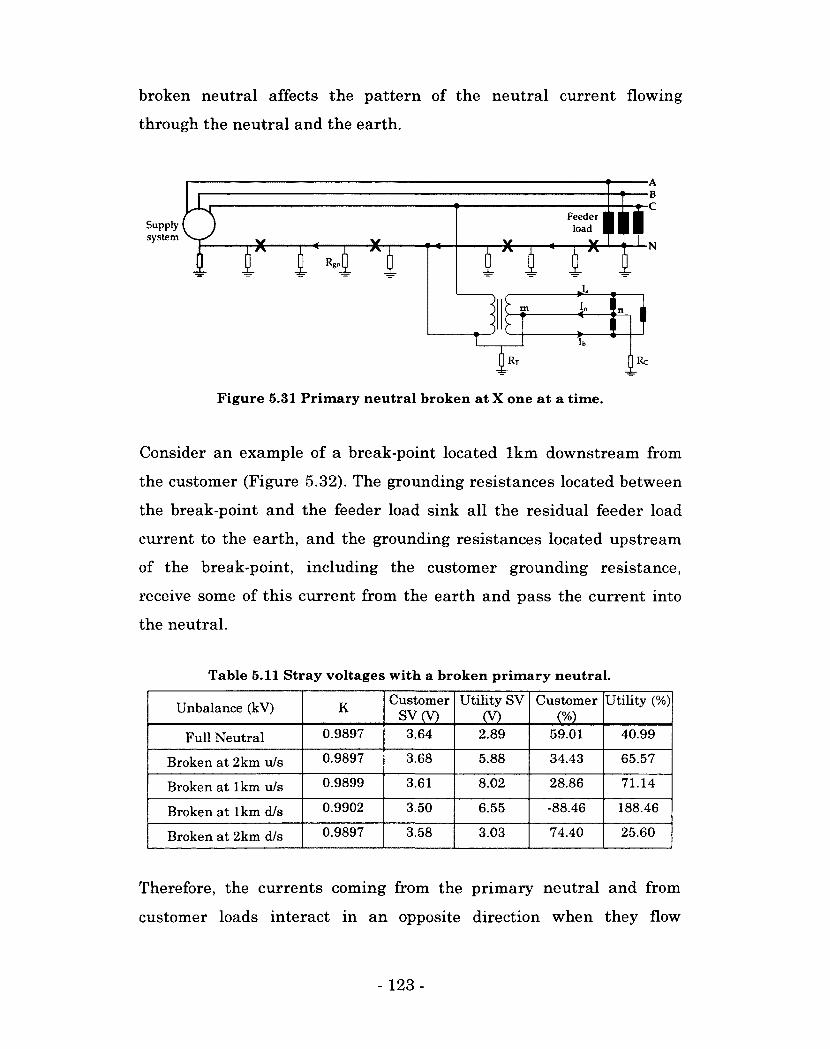
broken neutral affects the pattern of the neutral current flowing
through the neutral and the earth.
Feeder load Supply
system
m
Figure 5.31 Primary neutral broken at X one at a time.
Consider an example of a break-point located 1km downstream from
the customer (Figure 5.32). The grounding resistances located between
the break-point and the feeder load sink all the residual feeder load
current to the earth, and the grounding resistances located upstream
of the break-point, including the customer grounding resistance,
receive some of this current from the earth and pass the current into
the neutral.
Table 5.11 Stray voltages with a broken primary neutral.
Unbalance (kV) K Customer
SV(V) Utility SV
(V) Customer
(%) Utility (%)
Full Neutral 0.9897 3.64 2.89 59.01 40.99
Broken at 2km u/s 0.9897 3.68 5.88 34.43 65.57
Broken at 1km u/s 0.9899 3.61 8.02 28.86 71.14
Broken at 1km d/s 0.9902 3.50 6.55 -88.46 188.46
Broken at 2km d/s 0.9897 3.58 3.03 74.40 25.60
Therefore, the currents coming from the primary neutral and from
customer loads interact in an opposite direction when they flow
- 123 -

through Rc. As a result, one of the two components can be negative. In
this example, the customer contribution is negative.
i ' i ' 4 ' i f U t ' i t T T ~
From load
Figure 5.32 Current flow pattern in a broken neutral.
In principle, the effect of a broken neutral and the effect of poor
grounding resistance (Rgn) would be the same in that a high NEV
resulting from these situations causes the stray voltage to increase.
Therefore, as discussed earlier, the monitoring of the stray voltage
cannot reveal the grounding conditions such as a broken neutral or
poor grounding (i.e., high Rgn).
5.7.5 Operating Customer Loads Only
A primary feeder in a balanced or no-load condition does not have any
neutral current. When some customer loads come into operation, the
primary feeder no longer remains balanced so that some current exists
in its neutral. A part of this current can flow into the customer circuit
through the interconnection of the primary and secondary neutrals. In
this case, the contribution of the utility is small but not zero although
the stray voltage in the customer facility is from mainly the currents
originating from within the facility. Table 5.12 shows the different
combinations of the load and the resulting stray voltages, and Figure
5.33 shows the percentage contributions of the utility and customer.
These results reveal that the stray voltage from the utility is small
- 124-
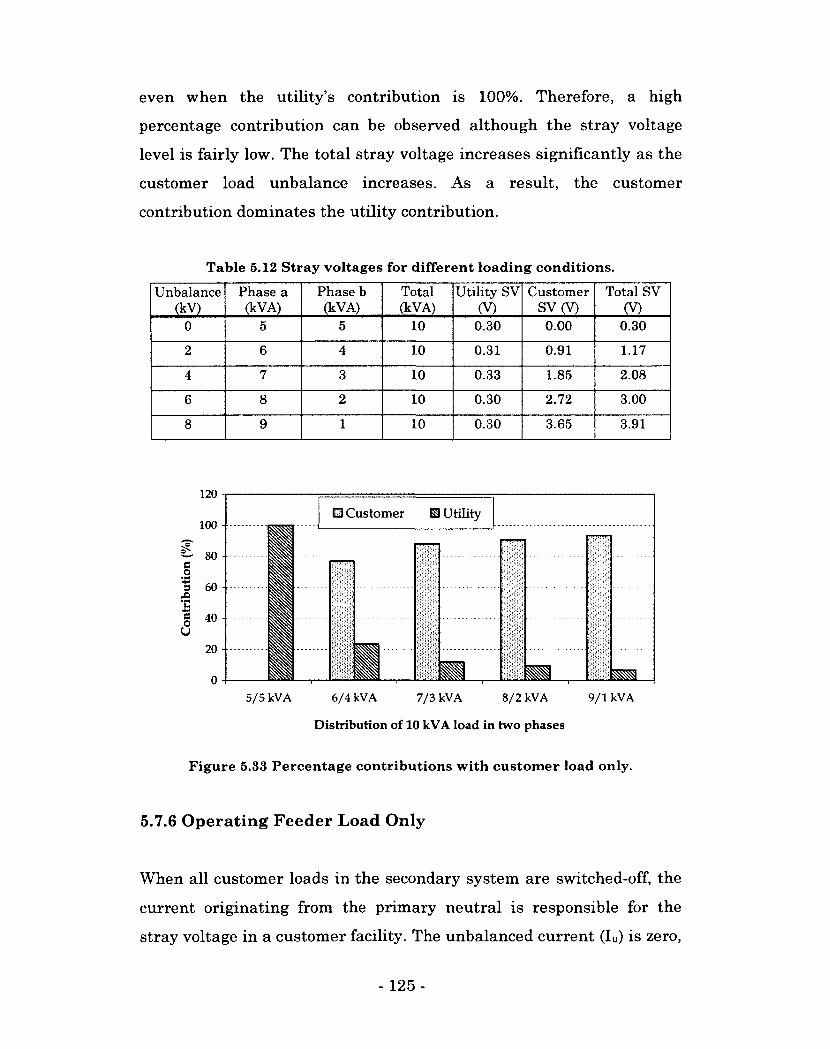
even when the utility's contribution is 100%. Therefore, a high
percentage contribution can be observed although the stray voltage
level is fairly low. The total stray voltage increases significantly as the
customer load unbalance increases. As a result, the customer
contribution dominates the utility contribution.
Table 5.12 Stray voltages for different loading conditions.
Unbalance (kV)
Phase a (kVA)
Phase b (kVA)
Total (kVA)
Utility SV (V)
Customer SV (V)
Total SV (V)
0 5 5 10 0.30 0.00 0.30
2 6 4 10 0.31 0.91 1.17
4 7 3 10 0.33 1.85 2.08
6 8 2 10 0.30 2.72 3.00
8 9 1 10 0.30 3.65 3.91
120
• Customer S Utility 100 -
2- 80 -c o 3 60 -XI
J3 e o U
40 -
20 -
6/4 kVA 5/5 kVA 7/3 kVA 8/2 kVA 9/1 kVA
Distribution of 10 kVA load in two phases
Figure 5.33 Percentage contributions with customer load only.
5.7.6 Operating Feeder Load Only
When all customer loads in the secondary system are switched-off, the
current originating from the primary neutral is responsible for the
stray voltage in a customer facility. The unbalanced current (Iu) is zero,
- 125 -
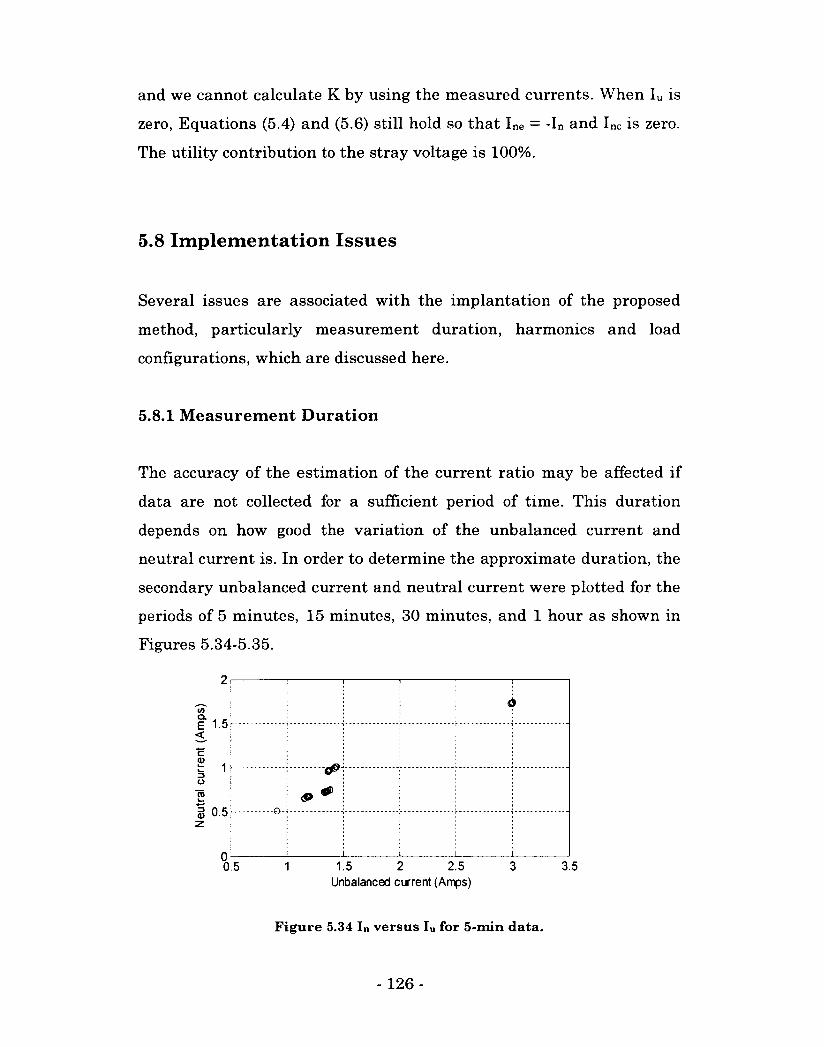
and we cannot calculate K by using the measured currents. When Iu is
zero, Equations (5.4) and (5.6) still hold so that Ine — -In and I nc is zero.
The utility contribution to the stray voltage is 100%.
5.8 Implementation Issues
Several issues are associated with the implantation of the proposed
method, particularly measurement duration, harmonics and load
configurations, which are discussed here.
5.8.1 Measurement Duration
The accuracy of the estimation of the current ratio may be affected if
data are not collected for a sufficient period of time. This duration
depends on how good the variation of the unbalanced current and
neutral current is. In order to determine the approximate duration, the
secondary unbalanced current and neutral current were plotted for the
periods of 5 minutes, 15 minutes, 30 minutes, and 1 hour as shown in
Figures 5.34-5.35.
2
wT Q. . _ E 1.5 <
11 0
"ro 1 0.5 z
0 0.5 1 1.5 2 2.5 3 3.5
Unbalanced current (Amps)
Figure 5.34 In versus Iu for 5-min data.
£ •
,
- 1 2 6 -
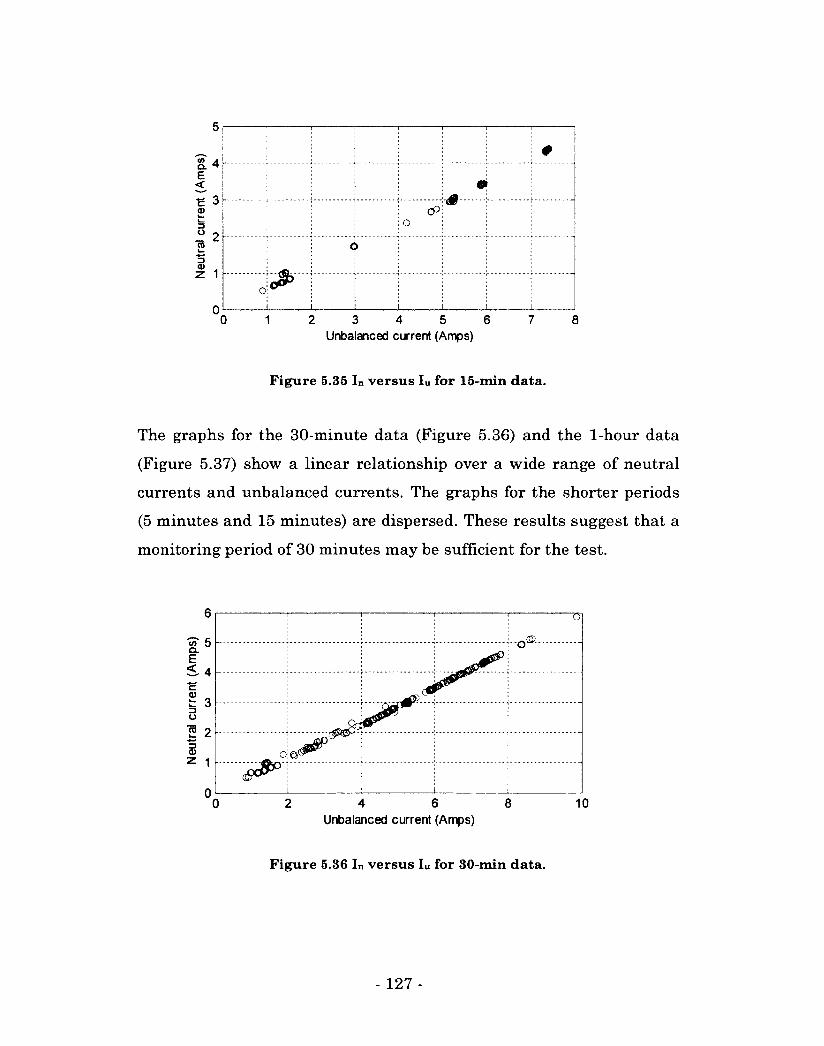
Q. t E <
« 3 <D l_ k_ 3 O o
3 0)
0
9 a
CP 0
CP
o
o «•>
0 1 2 3 4 5 6 7 8 Unbalanced current (Amps)
Figure 5.35 In versus Iu for 15-min data.
The graphs for the 30-minute data (Figure 5.36) and the 1-hour data
(Figure 5.37) show a linear relationship over a wide range of neutral
currents and unbalanced currents. The graphs for the shorter periods
(5 minutes and 15 minutes) are dispersed. These results suggest that a
monitoring period of 30 minutes may be sufficient for the test.
"3" 5 Q. E <4 -£ 0) i= 3 3 (J
2 2 3 0) 2 1
0 4 6
Unbalanced current (Amps) 10
Figure 5.36 In versus Iu for 30-min data.
- 127 -
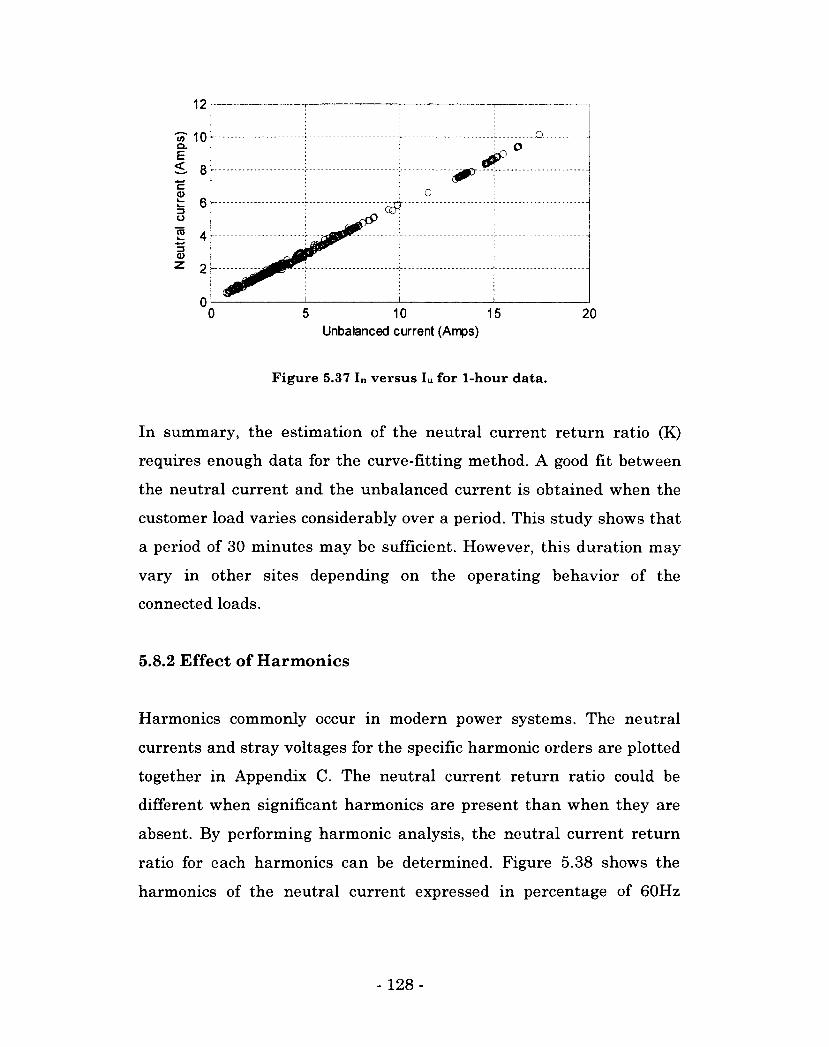
12
"5T 10 E
O
& c a> o 6 -
0 0 5 10 15 20
Unbalanced current (Amps)
Figure 5.37 In versus Iu for 1-hour data.
In summary, the estimation of the neutral current return ratio (K)
requires enough data for the curve-fitting method. A good fit between
the neutral current and the unbalanced current is obtained when the
customer load varies considerably over a period. This study shows that
a period of 30 minutes may be sufficient. However, this duration may
vary in other sites depending on the operating behavior of the
connected loads.
5.8.2 Effect of Harmonics
Harmonics commonly occur in modern power systems. The neutral
currents and stray voltages for the specific harmonic orders are plotted
together in Appendix C. The neutral current return ratio could be
different when significant harmonics are present than when they are
absent. By performing harmonic analysis, the neutral current return
ratio for each harmonics can be determined. Figure 5.38 shows the
harmonics of the neutral current expressed in percentage of 60Hz
- 128-
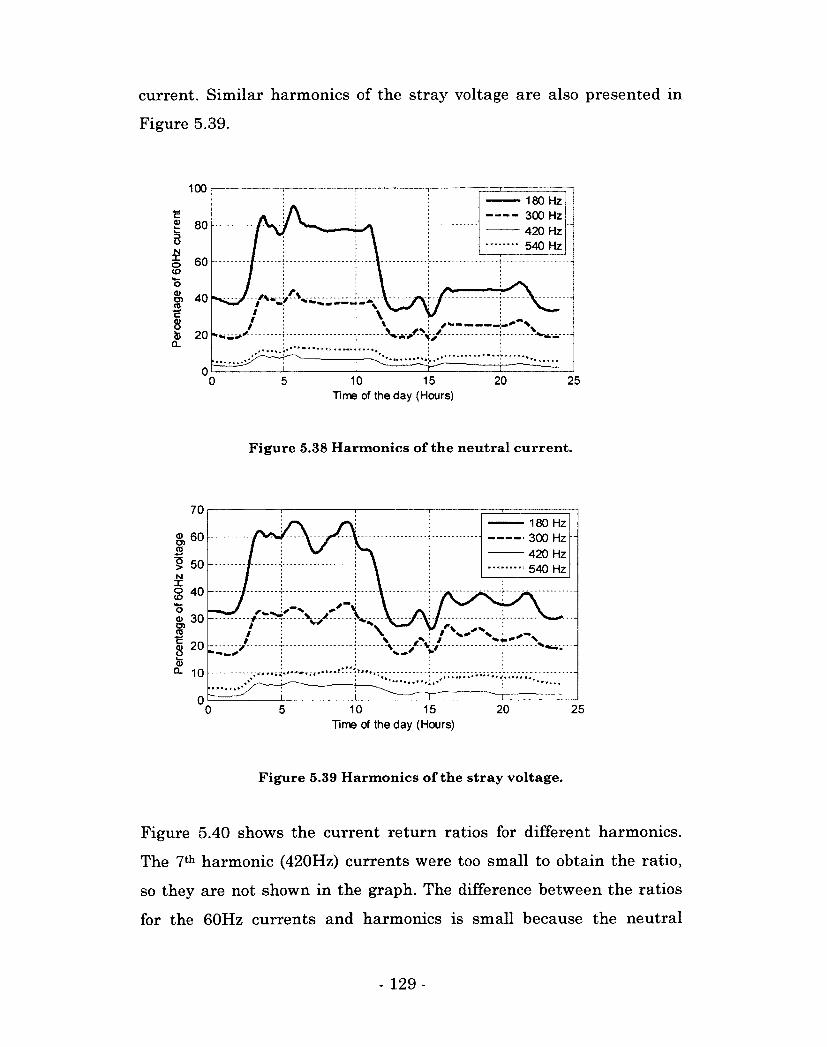
current. Similar harmonics of the stray voltage are also presented in
Figure 5.39.
100 180 Hz
— 300 Hz 420 Hz
•• • 540 Hz
80
CO
O) 40
20
Time of the day (Hours)
Figure 5.38 Harmonics of the neutral current.
70 — 180 Hz — 300 Hz — 420 Hz
540 Hz 50
£ 40
w <u 30 cn
10
Time of the day (Hours)
Figure 5.39 Harmonics of the stray voltage.
Figure 5.40 shows the current return ratios for different harmonics.
The 7th harmonic (420Hz) currents were too small to obtain the ratio,
so they are not shown in the graph. The difference between the ratios
for the 60Hz currents and harmonics is small because the neutral
- 129-
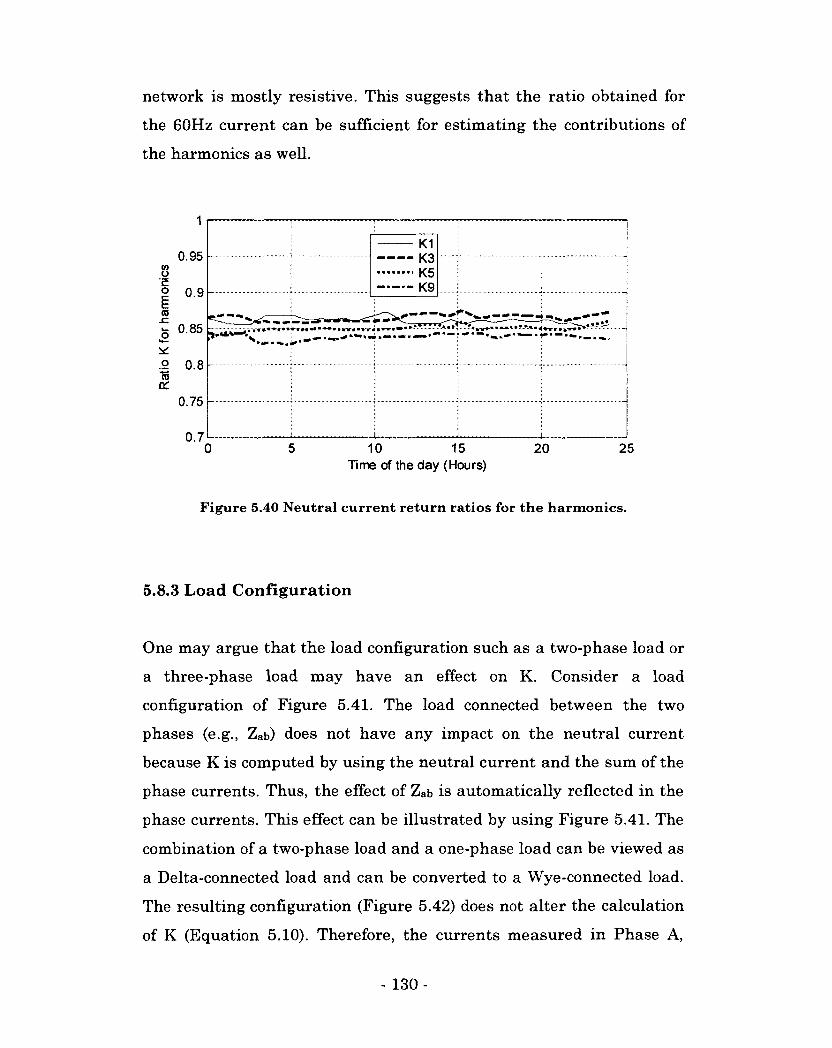
network is mostly resistive. This suggests that the ratio obtained for
the 60Hz current can be sufficient for estimating the contributions of
the harmonics as well.
0.95
- 0.85
0.75
0.7
- K3 K5
- K9
' I L i I I
0 5 10 15 20 25 Time of the day (Hours)
Figure 5.40 Neutral current return ratios for the harmonics.
5.8.3 Load Configuration
One may argue that the load configuration such as a two-phase load or
a three-phase load may have an effect on K. Consider a load
configuration of Figure 5.41. The load connected between the two
phases (e.g., Zab) does not have any impact on the neutral current
because K is computed by using the neutral current and the sum of the
phase currents. Thus, the effect of Zab is automatically reflected in the
phase currents. This effect can be illustrated by using Figure 5.41. The
combination of a two-phase load and a one-phase load can be viewed as
a Delta-connected load and can be converted to a Wye-connected load.
The resulting configuration (Figure 5.42) does not alter the calculation
of K (Equation 5.10). Therefore, the currents measured in Phase A,
- 130-
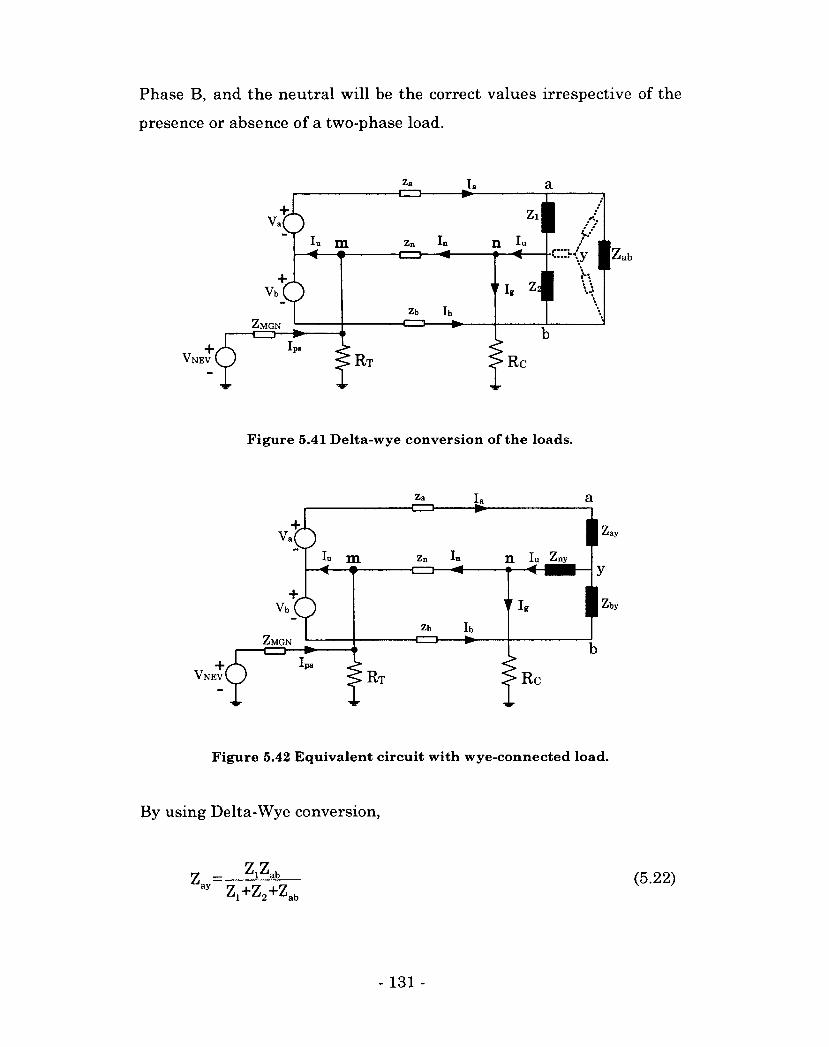
Phase B, and the neutral will be the correct values irrespective of the
presence or absence of a two-phase load.
ZMGN
VNEV Rc
Figure 5.41 Delta-wye conversion of the loads.
"ay
Zn
CZD-my
ZMGN
VNEV Rc
Figure 5.42 Equivalent circuit with wye-connected load.
By using Delta-Wye conversion,
Z = — — ( 5 2 2 ) ay Zj+Z2+Zab
- 131 -
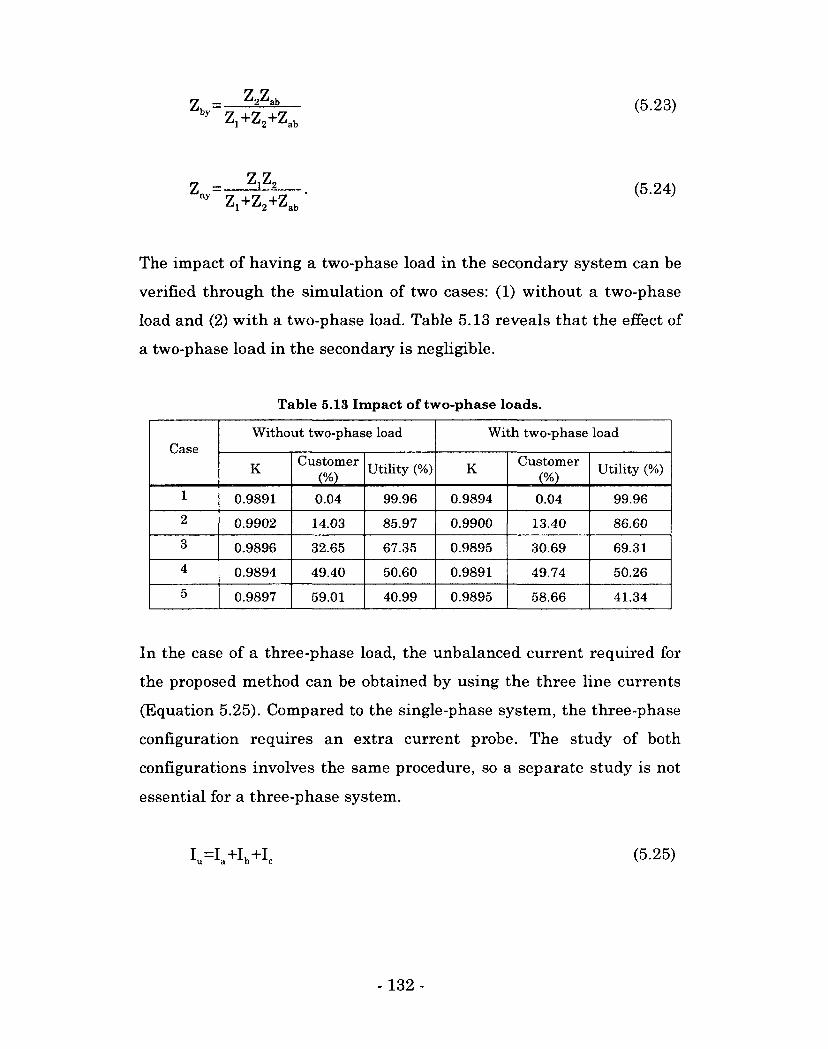
J b y ~
Z2Zab Zj+Z2+Z ab
(5.23)
ZIZ2 Zl+Z2+Z
ab
zny=„ ^ • (5-24)
The impact of having a two-phase load in the secondary system can be
verified through the simulation of two cases: (1) without a two-phase
load and (2) with a two-phase load. Table 5.13 reveals that the effect of
a two-phase load in the secondary is negligible.
Table 5.13 Impact of two-phase loads.
Case Without two-phase load With two-phase load
Case
K Customer
(%) Utility (%) K
Customer (%)
Utility (%)
1 0.9891 0.04 99.96 0.9894 0.04 99.96
2 0.9902 14.03 85.97 0.9900 13.40 86.60
3 0.9896 32.65 67.35 0.9895 30.69 69.31
4 0.9894 49.40 50.60 0.9891 49.74 50.26
5 0.9897 59.01 40.99 0.9895 58.66 41.34
In the case of a three-phase load, the unbalanced current required for
the proposed method can be obtained by using the three line currents
(Equation 5.25). Compared to the single-phase system, the three-phase
configuration requires an extra current probe. The study of both
configurations involves the same procedure, so a separate study is not
essential for a three-phase system.
Iu=Ia+Ib+Ic (5.25)
- 132 -

Primary circuit
Interconnection '
Secondary circuit •
la 1 y\ :Rc
Figure 5.43 Three-phase load supplied from the MGN system.
5.9 Conclusions
This chapter proposed a measurement-based method for allocating the
stray voltage contributions of the utility and customer at the utility-
customer interface point (i.e., the service panel). The main advantage
of this method is that no operating loads are interrupted during the
test. The analytical investigation, simulation and field experiment
verified the feasibility of the method. The potential applications of the
method were investigated, and some implementation issues were
clarified. The following summarizes the findings and conclusions:
• The proposed method provides the percentage contributions by
measuring the currents so that the main contributor of the stray
voltage can be identified.
• A high percentage contribution of the utility or customer can be
observed even for a small level of the stray voltage because the
sum of the percentage contributions is always 100%.
• By observing the stray voltage, the current return ratio (K) and
the percentage contributions, the proposed method can be used for
- 133 -
trouble-shooting the stray voltage problem and monitoring the
customer grounding and secondary neutral conditions.
• The ratio K changes significantly due to the variation of customer
grounding resistance and bad neutral conditions, but it does not
vary noticeably due to the grounding conditions of the primary
neutral.
• The field test results indicated that the data should be recorded
for about 30 minutes or more to obtain the ratio K by using a
curve-fitting method.
The stray voltage contribution determination method established in
this research is equally valid for a three-phase secondary system
although this method was developed by focusing on a single-phase
secondary system.
- 134-

6. Conclusions and Recommendations
6.1 Conclusions
The multi-grounded neutral (MGN) distribution systems are the most
common power delivery configurations in North America. The presence
of a neutral conductor and grounding arrangement makes these
systems' performances difficult to understand and assess. The existing
techniques to evaluate system performance are either not applicable to
MGN configurations or not able to provide a full understanding of the
electrical phenomena associated with operational problems. The main
objectives of this thesis were to develop an analytical understanding of
the electric characteristics of the MGN system, with the phenomena of
ground potential rise (GPR), temporary overvoltage (TOV) and stray
voltage as the main focus. Based on the analytical results obtained in
this research, the MGN parameters that play important roles were
identified, and some of the complex phenomena were clarified. These
findings were applied to establish a novel concept for determining the
contributions of off-site sources (e.g., the utility) and on-site sources
(e.g., the customer load) to the stray voltage level at the utility-
customer interface point.
The mechanism of GPR generation in MGN systems was illustrated,
and an analytical method was developed to assess the maximum GPR.
This method is capable of quantifying the impact of various MGN
- 135 -
parameters such as the grounding resistance, the neutral conductor
size and the grounding interval. The good agreement between the
analytical and simulation results demonstrated the accuracy of the
approximate methods. The following conclusions can be made from the
GPR studies:
• The voltage induced by the fault current through the coupling
with neutral conductor is the main cause of GPR in the case of
LG faults.
• The fault current is the most decisive factor for the magnitude of
the maximum GPR.
• The GPR is proportional to the equivalent impedance of the
MGN and the square-root of the grounding resistance, the
impedance of the neutral conductor, and the grounding interval.
• The maximum GPR occurs at the grounded node where the
induced shunt current source is located.
• The induced current sources are located at the ends of the
section of the neutral length exposed to the fault current.
One of the challenges with MGN systems is identifying the impacts of
the neutral current, which varies from segment to segment along the
neutral wire. A new "total neutral current" approach was proposed to
incorporate the effect of these currents in the TOV assessment. The
analytical equations developed for GPR calculation were employed to
further establish the TOV equations. The proposed method identifies
the various contributing factors such as the fault current and neutral
current, and quantifies their contributions to the TOV. The
effectiveness of the developed methods was verified through simulation
studies. From these studies, the following conclusions can be drawn:
- 136-
• The voltages induced by the fault current and the neutral
current are the most decisive factors for the TOV. While the
fault current caused about 30% to the TOV, the neutral current
compensated by about 10%. Therefore, the neutral currents
should be included in the overvoltage calculation.
• The substation neutral voltage, which contributed less than 2%,
is insignificant.
• The grounding parameters such as the grounding resistance and
grounding interval also have a small impact on the TOV.
A novel concept was conceived for allocating the stray voltage
contributions of the utility and the customer at the utility-customer
interface point, and a measurement-based method was established.
This method eliminates various practical difficulties associated with
the field test. For example, the operating loads are not interrupted,
and the portable loads are not required. The effectiveness of the
method was verified through analytical studies, simulations and field
experiments. A number of implementation issues, such as the duration
of the test, the harmonics and the load configurations, were clarified.
The main findings and conclusions are summarized as follows:
• The percentage contributions of the utility and customer can be
estimated effectively by measuring the currents only, and the
main contributor of the stray voltage can be identified.
• A high percentage contribution of the utility or customer can be
observed even for a small level of the stray voltage because the
sum of the percentage contributions is always 100%.
• The neutral-current return ratio (K) changes significantly due to
the variation of the customer grounding resistance and bad
neutral conditions, but does not vary noticeably with a change in
the grounding conditions of the primary neutral.
- 137 -
• The field test results suggest that recording data for 30 minutes
or more is sufficient to obtain the ratio K by using the curve-
fitting method.
• The effect of harmonics on the ratio K was minimal because this
ratio deals with neutral network which is mostly resistive.
The approximate formulae developed in this thesis to evaluate the
GPR of the MGN neutral can be used as a handy tool to evaluate the
GPR in many other applications, including the shield wire of the
transmission system, the neutral wire of the distribution system, and
the telephone cable. The findings of the TOV analysis are important for
the selection of surge arresters and insulation coordination. The
concept of the total neutral current approach in the TOV calculation
method together with the GPR analysis technique can be applied to
estimate the voltages created by the power line currents in nearby
conductors such as telephone cables, pipelines, and other power lines.
Similarly, the method established for distinguishing the stray voltage
sources can be used for the trouble-shooting of a stray voltage problem
by locating the main cause. As well, this method has the potential to be
applied in modern metering devices to monitor the customer grounding
and neutral conditions. The findings of the stray voltage studies also
provide an opportunity to explore stray voltage problems and
mitigation methods.
6.2 Recommendations for Future Work
6.2.1 Estimating the GPR along the Neutral Length
The magnitude and location of the highest GPR were identified in this
thesis. This result provides an opportunity to explore the technique to
- 138 -
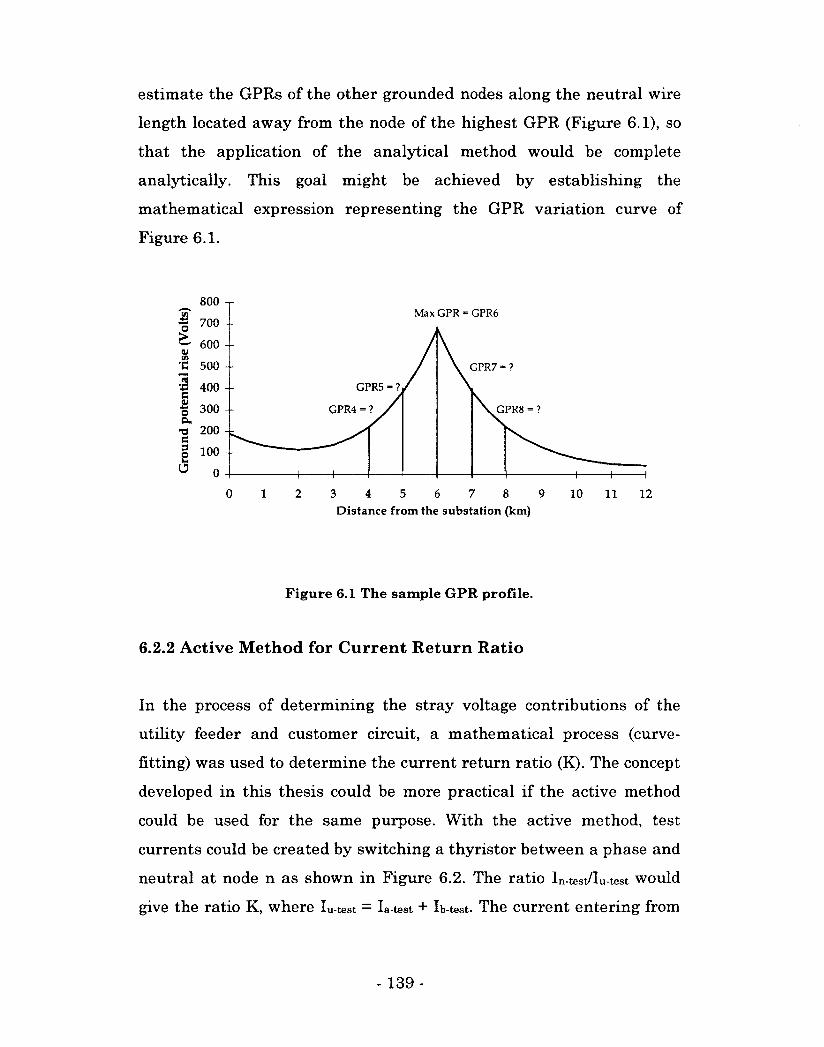
estimate the GPRs of the other grounded nodes along the neutral wire
length located away from the node of the highest GPR (Figure 6.1), so
that the application of the analytical method would be complete
analytically. This goal might be achieved by establishing the
mathematical expression representing the GPR variation curve of
Figure 6.1.
800 -r-
Max GPR = GPR6 700
^ 600 -v (O 'C 500 - GPR7-?
« 400 -- GPR5 = ?
300 - GPR4 = ? GPR8 = ?
100 -
0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2 Distance from the substation (km)
Figure 6.1 The sample GPR profile.
6.2.2 Active Method for Current Return Ratio
In the process of determining the stray voltage contributions of the
utility feeder and customer circuit, a mathematical process (curve-
fitting) was used to determine the current return ratio (K). The concept
developed in this thesis could be more practical if the active method
could be used for the same purpose. With the active method, test
currents could be created by switching a thyristor between a phase and
neutral at node n as shown in Figure 6.2. The ratio In-test/Iu-test would
give the ratio K, where Iu-test = la test + lb-test. The current entering from
- 139-
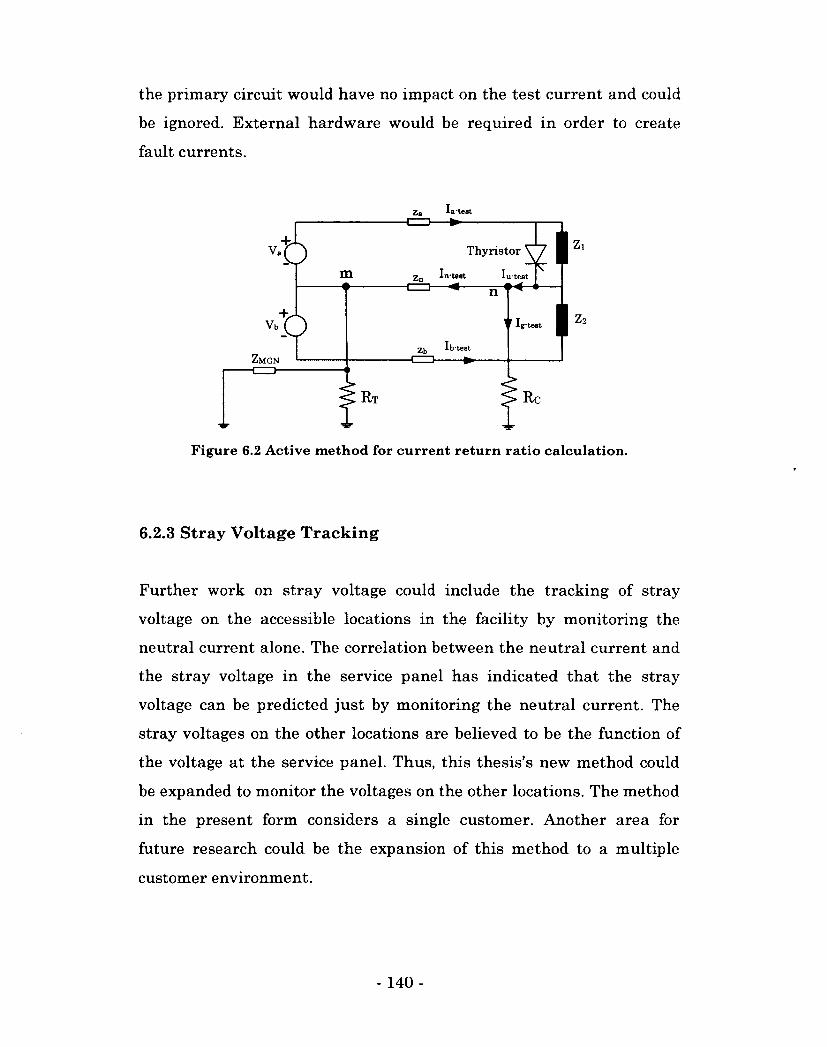
the primary circuit would have no impact on the test current and could
be ignored. External hardware would be required in order to create
fault currents.
Figure 6.2 Active method for current return ratio calculation.
6.2.3 Stray Voltage Tracking
Further work on stray voltage could include the tracking of stray
voltage on the accessible locations in the facility by monitoring the
neutral current alone. The correlation between the neutral current and
the stray voltage in the service panel has indicated that the stray
voltage can be predicted just by monitoring the neutral current. The
stray voltages on the other locations are believed to be the function of
the voltage at the service panel. Thus, this thesis's new method could
be expanded to monitor the voltages on the other locations. The method
in the present form considers a single customer. Another area for
future research could be the expansion of this method to a multiple
customer environment.
ZM
Thyristor
- 140 -

References
[1] ANSI/IEEE C2 — 2002, The National Electrical Safety Code®,
Section 09, IEEE Inc, 1995.
[2] R. Rudenberg, Transient Performance of Electric Power Systems,
New York: McGraw-Hill, 1950.
[3] A. P. Meliopoulos, "Impact of Grounding System Design on Power
Quality", IEEE Power Engineering Review, Nov 2001, p. 3-7.
[4] A. P. Meliopoulos, G. J. Cokkinides, K. R. Chakravarthi, "Effects
of Grounding on Distribution System Harmonic Resonance
Conditions", IEEE Transactions on Power Delivery, Vol. 4, No. 1,
January 1989, p. 475-682.
[5] IEEE C62.92.4-1991, Guide for the Application of Neutral
Grounding in Electrical Utility Systems, Part IV-Distribution,
1992.
[6] J. Burke, M. Marshal, "Distribution System Neutral Grounding,"
IEEE Proceedings of Transmission and Distribution Conference
and Exposition, Vol. 1, 2001, p. 166-170.
[7] IEEE Working Group, Voltages at Publicly and Privately
Accessible Locations, Trial Use Guide (Draft), 2009.
[8] D. W. Zipse, "Electrical Shock Hazard due to Stray Current (The
Shocking Shower) ", IEEE Industrial and Commercial Power
Systems Conference Record, 1999, p. 1-6.
[9] IEEE Std. 1159, Recommended Practice for Monitoring Electric
Power Quality, 1995.
[10] R. C. Dugan, M. F. McGranaghan, H. W. Beaty, Electrical Power
Systems Quality, McGraw-Hill Publishing, 1996.
- 141 -
[11] CIGRE WG 33.10 and IEEE Task Force on TOV, "Temporary
Overvoltages: Causes, Effects and Evaluation — Summary", IEEE
Power Engineering Review, Vol. 10, No. 6, p. 14-15.
[12] J. Acharya, W. Xu, "Voltage Swell Characteristics in Multi-
grounded Systems," IEEE Transactions on Power Delivery, Vol.
22, No. 2, April 2007, p. 1259-1260.
[13] J. Acharya, W. Xu, "Characteristics of Voltage Imbalance and
Neutral Current and Voltage Distributions in Multi-grounded
Systems," Journal of Power Energy and Systems, Vol. 29, No. 3,
2009, p. 193-199.
[14] J. Acharya, W. Xu, "Temporary Overvoltage and GPR
Characteristics of Distribution Feeders with Multi-grounded
Neutral", IEEE Transactions on Power Delivery, Vol. 25, No. 2,
April 2010, p. 1036-1044.
[15] J. Acharya, W. Xu, "Ground Potential Rise of Multi-grounded
Neutral and Shield Wires in Joint Systems", Electric Power
Systems Research, Vol. 80, April 2010, p. 1074-1081.
[16] Y. Wang, J. Acharya, W. Xu, "Shielding Effect of Multi-grounded
Neutral Wire on Power Line Induced Voltages", European
Transactions on Electric Power, Accepted, April 2010, 8p.
[17] A. P. Meliopoulos, Power System Grounding and Transients,
Marcel Dekker Inc., 1988.
[18] IEEE Std. 142-1991, Recommended Practice for Grounding of
Industrial and Commercial Power Systems, June 1992.
[19] IEEE Std. 80, Guide for Safety in AC Substation Grounding, 2000.
[20] A. P. Meliopoulos, G. Cokkinides, H. Abdallah, "A PC Based
Ground Impedance Measurement", IEEE Transactions on Power
Delivery, Vol. 8, No. 3, July 1993, p. 1095-1106.
[21] J. R. Carson, "Wave Propagation in Overhead Wires with Ground
Return", Bell System Tech. Journal, Vol. 5, 1926, p. 539-554.
- 142 -
[22] P. M. Anderson, Analysis of Faulted Power System, Ames, Iowa:
Iowa State University Press, 1973.
[23] A. Deri, G. Tevan, A. Semlyen, A. Castanheira, "A Simplified
Model for Homogeneous and Multi-layer Earth Return," IEEE
Transactions Power Apparatus And Systems, Vol. PAS-100, No. 8,
Aug. 1981, p. 3686-3693.
[24] E. D. Sunde, Earth Conduction Effects in Transmission Systems,
New York: Van Nostrand, 1949.
[25] D. G. Triantafyllidis, G. K. Papagiannis, D. P. Labridis,
"Calculation of Overhead Transmission Line Impedances: A Finite
Element Approach", IEEE Transactions Power Delivery, Vol. 14,
No. 1, Jan. 1999, p. 287-293.
[26] E. Clarke, Circuit Analysis ofA-C Power Systems, Volume I:
Symmetrical and Related Components, McGraw-Hill Book
Company, Inc., 1933.
[27] C. F. Wagner, R. D. Evans, Symmetrical Components, McGraw-
Hill Book Com. Inc., 1933.
[28] W. D. Stevenson, J. J. Grainger, Power System Analysis, McGraw-
Hill, Inc. 1994.
[29] J. Endrenyi, "Transmission Tower Potentials during Ground
Faults, and Their Reduction", Ontario Hydro Research Quarterly,
Vol. 17, Second Quarter, 1965, p. 14-18.
[30] J. Endrenyi, "Analysis of Transmission Tower Potentials during
Ground Faults", IEEE Transactions on Power Apparatus and
Systems Vol. PAS-86, No. 10, 1967, p. 1274-1283.
[31] S. A. Sebo, "Zero-Sequence Current Distribution along
Transmission Lines", IEEE Transactions on Power Apparatus and
Systems", Vol. PAS-88, No. 6, June 1969, p. 910-919.
[32] C. F. Desieno, P. P. Marchenko and G. S. Vessel, "General
Equations for Fault Currents in Transmission Line Ground
- 143 -
Wires", IEEE Transactions on Power Apparatus and Systems, Vol.
PAS-89, No. 8, 1970, p. 1891-1900.
[33] A. P. Meliopoulos, R. P. Webb, E. B. Joy, "Analysis of Grounding
Systems", IEEE Transactions on Power Apparatus and Systems,
Vol. PAS-100, No. 3, March 1981, p. 1031-1038.
[34] F. Dawalibi, G. B. Niles, "Measurements and Computations of
Fault Current Distribution on Overhead Transmission Lines",
IEEE Transactions on Power Apparatus and Systems, Vol. PAS-
103, No. 3, March 1984, p. 553-560.
[35] L. Levey, "Calculation of Ground Fault Currents using an
Equivalent Circuit and a Simplified Ladder Network", IEEE
Transactions on Power Apparatus and Systems, Vol. PAS-101, No.
8, August 1982, p. 2491-2497.
[36] L. Levey, "A New Method of Analysis for Multigrounded Cable
Shields Inductively and Conductively Coupled to Multigrounded
Neutral Power Lines", IEEE Transactions on Electromagnetic
Compatibility, Vol. EMC-29, No. 2, May 1987, p. 116-125.
[37] L. Levey, "Computation of Fault Currents and Voltages along a
Multigrounded Neutral Power Line Having Multiple Phase
Conductors", IEEE Transactions on Power Delivery, Vol. 6, No. 4,
October 1991, p. 1541-1548.
[38] M. V. Lat, "Determining Temporary Overvoltage Levels for
Application of Metal Oxide Surge Arresters on Multi-grounded
Distribution Systems", IEEE Transactions on Power Delivery, Vol.
5, No. 2, April 1990, p. 936-946.
[39] D. P. Millard, A. P. Meliopoulos, G. J. Cokkinides, "Parametric
Analysis of EMP Induced Overvoltages on Power Lines", IEEE
Transactions on Power Delivery, Vol. 3, No. 3, July 1988, p. 1224-
1231.
- 144-
[40] F. M. Gatta, A. Geri, S. Lauria, M. Maccioni, "Analytical
Prediction of Abnormal Temporary Overvoltages due to Ground
Faults in MV Networks", Electric Power Systems Research, Vol.
77, Issue 10, 2007, p. 1305-1313.
[41] J. M. Undrill, R. E. Clayton, "Distribution Line Performance with
Imperfect Grounding," IEEE Transactions on Industry
Applications, Vol. 24, No. 5, 1988, p. 805-811.
[42] W. Xu, J. Marti, H. W. Dommel, "Multiphase Harmonic Load Flow
Solution Technique", IEEE Transactions Power Systems, Vol. 6,
No. 1, 1991, p. 174-182.
[43] W. Xu, MHLFReference Manual, Powertech Lab Inc., Surrey,
British Columbia, Canada, 1991.
[44] H. W. Dommel, EMTP Theory Book, Microtran Power System
Analysis Corporation, Vancouver, BC, Canada, 1996.
[45] A. P. Meliopoulos, F. Zhang, "Multiphase Power Flow and State
Estimation for Power Distribution Systems", IEEE Transactions
on Power Systems, Vol. 11, No. 2, May 1996, p. 939-946.
[46] A. P. Meliopoulos, G. J. Cokkinides, R. Lasseter, "A Multiphase
Power Flow Model for Microgrid Analysis", Proceedings of the 36th
Hawaii International Conference on System Sciences, 2002, 7p.
[47] K. Oka, J. Yoshinaga, S. Koizumi, S. Uemura, Y. Ariga, "Study of
Neutral Grounding for 22kV Distribution Systems", IEEE
Transmission and Distribution Conference and Exhibition, Vol.
122-B, No. 3, 2002, p. 401-407.
[48] K. Oka, S. Koizumi, K. Oishi, T. Yokota, S. Uemura, "Analysis of
Neutral Grounding Method for a Three-Phase Four-Wire 11.4kV
Distribution System", IEEE Transmission and Distribution
Conference and Exhibition, Vol. 2, 2002, p. 998-1003.
- 145 -
[49] Y. Rajotte, J. Fortin, G. Raymond, "Impedance of Multi-grounded
Neutrals on Rural Distribution Systems", IEEE Transactions on
Power Delivery, Vol. 10, No. 3, July 1995, p. 1453-1459.
[50] Y. Rajotte, J. Fortin, B. Cyr, G. Raymond, "Characterization of the
Ground Impedance of Rural MY Lines on Hydro-Quebec's
System", CIRED-97, IEE Publication No. 438, 1997, p. 17/1-17/5.
[51] Y. Rajotte, J. Fortin, B. Cyr, "Lightning Overvoltages on LV
Networks Fed by MV Lines with a Multigrounded Neutral",
CIRED Conference, 1999.
[52] R. T. Mancao, J. Burke, A. Myer, "The Effect of Distribution
Grounding on MOV Selection", IEEE Transactions on Power
Delivery, Vol. 8, No. 1, January 1993, p. 139-145.
[53] T. H. Chen, W. C. Yang, "Analysis of Multi-Grounded Four-Wire
Distribution Systems Considering the Neutral Grounding", IEEE
Transactions on Power Delivery, Vol. 16, No. 4, 2001, p. 710-717.
[54] B. K. Chen, M. S. Chen, R. R. Shoults, C. C. Liang, "Hybrid Three-
Phase Load Flow", IEE Proceedings C, Vol. 137, No. 3, May 1990,
p. 177-185.
[55] R. M. Ciric, A. P. Feltrin, L. F. Ochoa, "Power Flow in Four-Wire
Distribution Networks - General Approach", IEEE Transactions
on Power Systems, Vol. 18, No. 4, November 2003, p. 1283-1290.
[56] D. W. Zipse, "The Hazardous Multi-Grounded Neutral
Distribution System and Dangerous Stray Currents", IEEE
Petroleum and Chemical Industry Committee Technical
Conference, 2003, p. 1-23.
[57] J. Burke, "The Confusion Over Stray Voltage", IEEE Industry
Applications Magazine, May/June 2008, p. 63-66.
[58] A. M. Lefcourt, Ef fec t o f E lec t r ica l Vol tage /Curren t on Farm
Animals, US Department of Agriculture, Handbook No. 196, 1991,
p. 1-142.
- 146-
[59] J. P. Nelson, "Grounding Power Systems above 600 V - A
Practical Viewpoint", IEEE Industry Applications Magazine,
Jan/Feb 2006, p. 50-58.
[60] J. Burke, "Stray Voltage - Two Different Perspectives", IEEE
Industry Applications Magazine, May/June 2009, p. 36-41.
[61] D. A. Halvorson, S. L. Noll, M. E. Bergeland, H. A. Cloud and R.
Pursley, "The Effects of Stray Voltage on Poults", Avian Diseases,
Vol. 13, No. 3, 1989, p. 582-585.
[62] D. J. Reinemann, Literature Review and Synthesis of Research
Findings on the Impact of Stray Voltages on Farm Operations, A
Report Prepared for the Ontario Energy Board, March 2008, 70p.
[63] T. C. Surbrook, N. D. Reese, "System and Equipment Grounding
and Their Effects on Stray Voltage", Proceedings of the National
Stray Voltage Symposium, Syracuse, NY, USA, ASAE Publication,
1985, p. 140-146.
[64] L. D. Lillmars, T. C. Surbrook, "Procedures for Investigating Stray
Voltage Problems on Farms", (Paper presented at ASAE Summer
Meeting, Jun 15-18, 1980, San Antonio, TX), American Society of
Agricultural Engineers, 1980, 16p.
[65] R. J. Gustafson, "Understanding and Dealing with Stray Voltage
in Livestock Facilities", 1985 Rural Electric Power Conference,
Springfield, IL, Rural Electric Power Conference, 1985, 19p.
[66] R. A. Peterson, "Stray Voltage Research: Past, Present and
Future", 1985 Winter Meeting - American Society of Agricultural
Engineers, Chicago, IL, American Society of Agricultural
Engineers, 1985, 3p.
[67] P. E. Ortmann, "Recent Developments in Stray Voltage Rules and
Regulations", IEEE Rural Electric Power Conference, 2006, p. 1-4.
- 147 -

[68] A. Charette, G. Simard, "Stray Voltage at Farm Site - Utilities
Practice and Review", IEEE Transmission and Distribution
Conference and Exposition, May 2006, p. 260-262.
[69] M. A. Cook, D. M. Dasho, R. S. Reines, "On Distinguishing
Various Contributors to Stray Voltage from Both 'On-Farm' and
'Off-farm' Sources", PSC Wisconsin - White Paper Series, 1994.
[70] T. C. Surbrook, J. R. Althouse, K. G. Tinsey, "Protocols and
Practices for Stray Voltage Testing", Proceeding from Stray
Voltage and Dairy Farms, April 9-11, 2003, 21p.
[71] A. Maitra, W. Sunderman, D. Dorr, "Studying the Impact of
Elevated Neutral to Earth Voltage on Distribution Systems due to
Triplen Harmonics", IEEE Power Engineering Society General
Meeting, June 2006, 3p.
[72] S. Patel, F. Lambert, "Induced Stray Voltages from Transmission
Lines", IEEE Transmission and Distribution Conference and
Exposition, 2006, p. 254-259.
[73] W. G. Sunderman, R. C. Dugan, D. S. Dorr, "The Neutral-to-Earth
Voltage (NEV) Test Case and Distribution System Analysis",
IEEE PES General Meeting, Pittsburgh, PA, July 2008, p. 1-6.
[74] R. Collins, J. Jiang, "Elevated NEV due to Triplen Harmonics",
IEEE Transmission and Distribution Conference and Exposition,
Dallas, May 2006, p. 263-267.
[75] E. R. Collins, J. Jiang, "Analysis of Elevated Neutral-to-Earth
Voltage in Distribution Systems with Harmonic Distortion," IEEE
Transactions on Power Delivery, Vol. 24, No. 3, 2009, p. 1696-
1702.
[76] T. Q. Tran, L. E. Conrad, B. A. Stallman, "Electric Shock and
Elevated EMF Levels due to Triplen Harmonics", IEEE
Transactions on Power Delivery, Vol. 11, No. 2, 1996, p. 1041-1049.
- 148 -
[77] J. N. Prothero, B. W. Lukecart, C. M. DeNardo, "Primary Neutral-
to-Earth Voltage Levels as Affected by System Grounding,
Neutral Separation, and Load Balancing", IEEE Industry
Application Society Meeting, California, October 1989, p. 1739-
1746.
[78] T. C. Surbrook, N. D. Reese, J. R. Althouse, "Parameters Affecting
Neutral-to-Earth Voltage along Primary Distribution Circuits",
IEEE Transactions on Industry Applications, Vol. 24, No. 5, 1988,
p. 798-804.
[79] IEEE Task Force 15.07.06.03-ESMOL Subcommittee of
Transmission and Distribution, "Methods for Protecting
Employees and Others From Electric Hazards Adjacent to Electric
Utility Vehicles", IEEE Transactions on Power Delivery, Vol. 10,
No. 2, April 1995, p. 950-960.
[80] B. Erga, "Test Results of Grounding Uninsulated Aerial Lift
Vehicle Near Energized Distribution Lines", IEEE PES Summer
Meeting, San Diego, California, July 28 - Aug 1, 1991, p. 1-7.
[81] A. P. Lyttle, "Vehicle Grounding Pros and Cons," 1988 Fall
Meeting of the Canadian Electrical Association.
[82] J. Beattie, "The Pros and Cons of Vehicle Grounding with
Reference to Bonding and Equipotential Zones", November 2000.
[83] A. Ketabi, A. M. Ranjbar, R. Feuillet, "Analysis and Control of
Temporary Overvoltages for Automated Restoration Planning",
IEEE Transactions on Power Delivery, Vol. 17, No. 4, October
2001, p. 1121-1127.
[84] Z. Zdravkovic, "Insulation Coordination for Continuous Operating
Voltages and Temporary Overvoltages", Electrical Engineering,
Springer-Verlang, Vol. 88, 2006, p. 441-446.
[85] IEEE WG of Surge Protective Devices, "Voltage Rating
Investigation for Application of Lightning Arresters on
- 149-
Distribution Systems", EEE Summer Meeting and International
Symposium on High Power Testing, Portland, Oregon, July 1971,
p. 1067-1074.
[86] H. R. Klewe, Interference between Power Systems and
Telecommunication Lines, London, Edward Arnold, 1958.
[87] W. S. Meyer and H. W. Dommel, "Telephone-Interference
Calculation for Multiconductor Power Lines", IEEE Transactions
on Power Apparatus and Systems, PAS-88, No. 1, 1969, p. 35-41.
[88] IEEE WG on Power System Harmonics, "Power Line Harmonics
Effects on Communication Line Interference", IEEE Transactions
on Power Apparatus and Systems, PAS-104, No. 9, 1985, p. 2578-
2587.
[89] W. Jewell, W. Miller and T. Casey, "Audible Telephone Noise from
Small Harmonic Sources on Single-Phase Distribution," IEEE
Proceedings of Harmonics and Quality of Power, Vol. 2, 1998, p.
890-895.
[90] R. Gundrum, "Power Line Interference", ABC of Telephone, Vol.
14, 1988, p. 1-50.
[91] R. D. Appleman, et al, "Source of Stray Voltage and Effect on Cow
Health and Performance", Journal of Dairy Science, Vol. 68, No. 6,
1985, p. 1554-1567.
[92] L. B. Craine, "Effects on Mammals of Grounded Neutral Voltage
from Distribution Power Lines", IEEE Rural Electric Power
Conference, 1975, 75-303-3-IA.
[93] C. Duvaux-Ponter, S. Roussel, F. Deschamps, "Determination of a
Stray Voltage Threshold Leading to Aversion in Sheep",
International Society of Applied Ethology, 2005, p. 130.
[94] S. Robert, J. J. Matte, J. Bertin-Mahieux, G. P. Martineau,
"Effects of Continuous Stray Voltage on Health, Growth, and
- 150 -

Welfare of Fattening Pigs", Canadian Journal of Veterinary
Research, Vol. 55, No. 4, p. 371-376.
[95] J. D. Glover, M. S. Sarma, Power System Analysis and Design,
Second Edition, PWS Publishing Company, Boston, 1994.
- 151 -
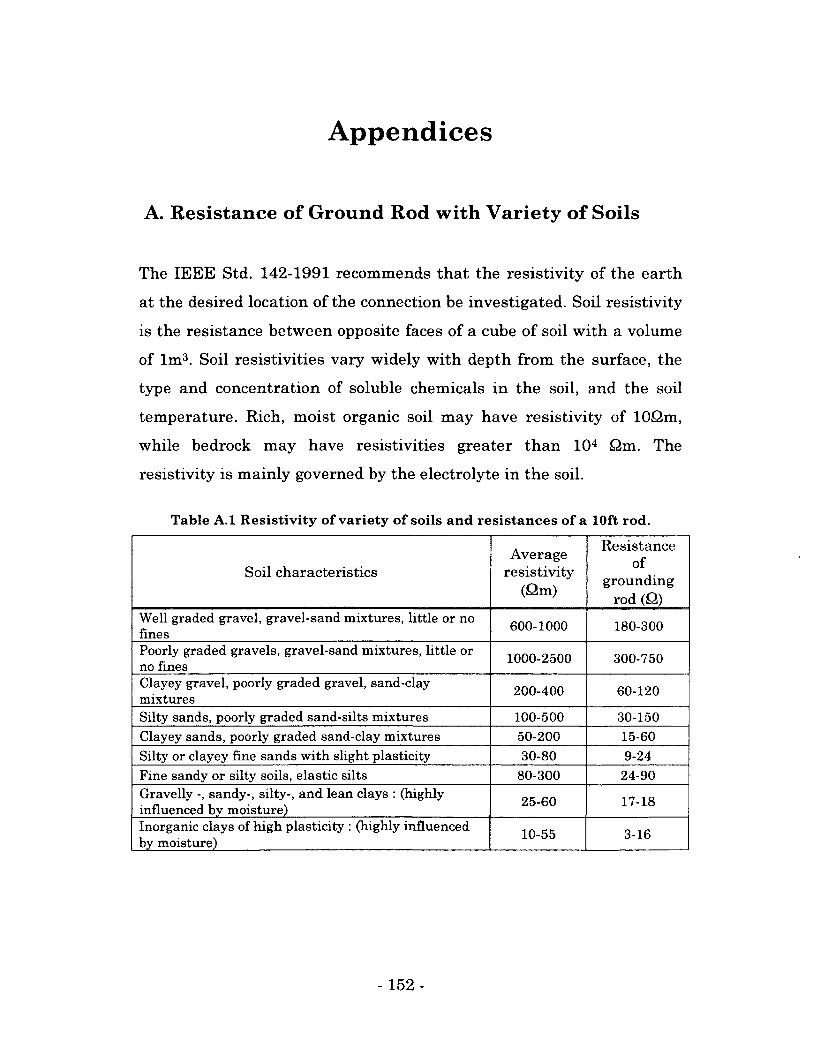
Appendices
A. Resistance of Ground Rod with Variety of Soils
The IEEE Std. 142-1991 recommends that the resistivity of the earth
at the desired location of the connection be investigated. Soil resistivity
is the resistance between opposite faces of a cube of soil with a volume
of lm3. Soil resistivities vary widely with depth from the surface, the
type and concentration of soluble chemicals in the soil, and the soil
temperature. Rich, moist organic soil may have resistivity of lOQm,
while bedrock may have resistivities greater than 104 flm. The
resistivity is mainly governed by the electrolyte in the soil.
Table A.l Resistivity of variety of soils and resistances of a 10ft rod.
Soil characteristics Average
resistivity (Qm)
Resistance of
grounding rod (£2)
Well graded gravel, gravel-sand mixtures, little or no fines
600-1000 180-300
Poorly graded gravels, gravel-sand mixtures, little or no fines
1000-2500 300-750
Clayey gravel, poorly graded gravel, sand-clay mixtures
200-400 60-120
Silty sands, poorly graded sand-silts mixtures 100-500 30-150 Clayey sands, poorly graded sand-clay mixtures 50-200 15-60 Silty or clayey fine sands with slight plasticity 30-80 9-24 Fine sandy or silty soils, elastic silts 80-300 24-90 Gravelly -, sandy-, silty-, and lean clays : (highly influenced by moisture)
25-60 17-18
Inorganic clays of high plasticity : (highly influenced by moisture)
10-55 3-16
- 152 -
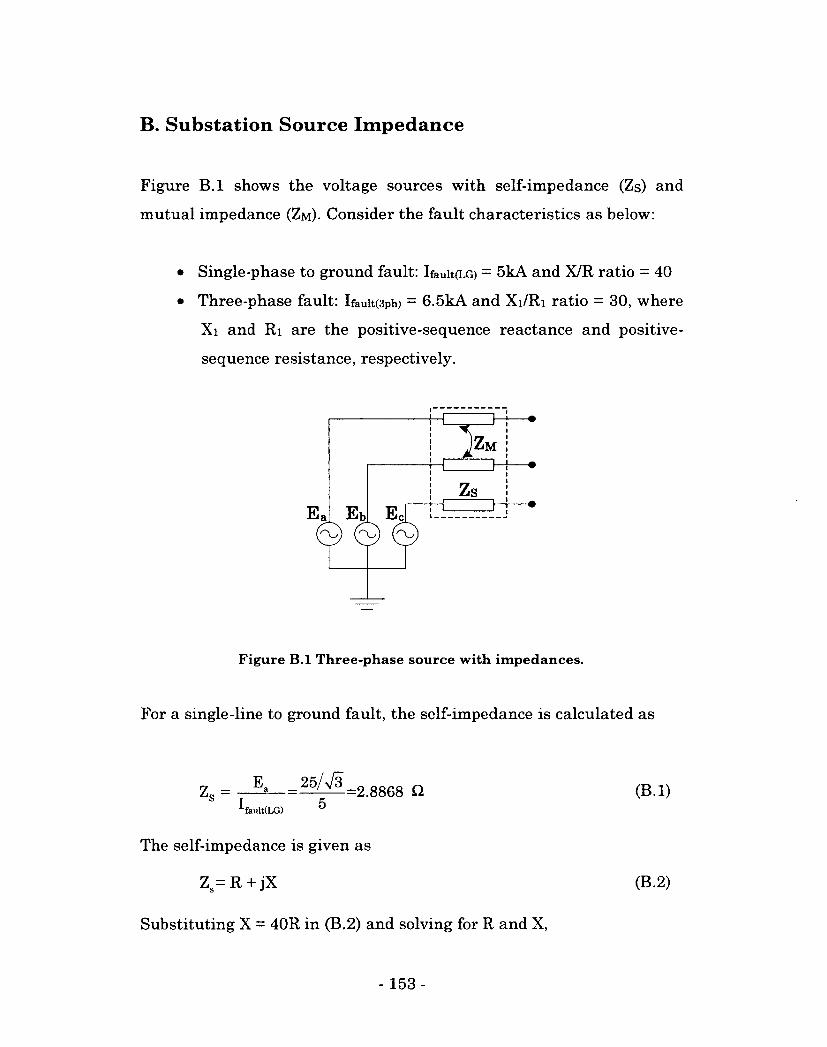
B. Substation Source Impedance
Figure B.l shows the voltage sources with self-impedance (Zs) and
mutual impedance (ZM)- Consider the fault characteristics as below:
• Single-phase to ground fault: IFAUIT(LG) = 5kA and X/R ratio = 40
• Three-phase fault: Ifauit(3ph) = 6.5kA and X1/R1 ratio = 30, where
Xi and Ri are the positive-sequence reactance and positive-
sequence resistance, respectively.
For a single-line to ground fault, the self-impedance is calculated as
Zs
Figure B.l Three-phase source with impedances.
fault(LG)
(B.l)
The self-impedance is given as
Zs= R + jX (B.2)
Substituting X = 40R in (B.2) and solving for R and X,
- 153 -

Zs = 0.072 + j2.8858 Q .
Similarly, for a three-phase symmetrical fault, the positive-sequence
impedance is given as
Zj = —^— = 25^= 2.2206 Q. (B.3) ^•fault(3ph) 6-5
Substituting Xi = 30Ri into Zi = Ri+jXi and solving for Ri and Xi,
Zi = 0.0740+ j2.2193 Q.
Also
^1 ~ Zs"
ZM = Zs - Zi = - 0.0018 + j0.6665 Q.
- 154 -
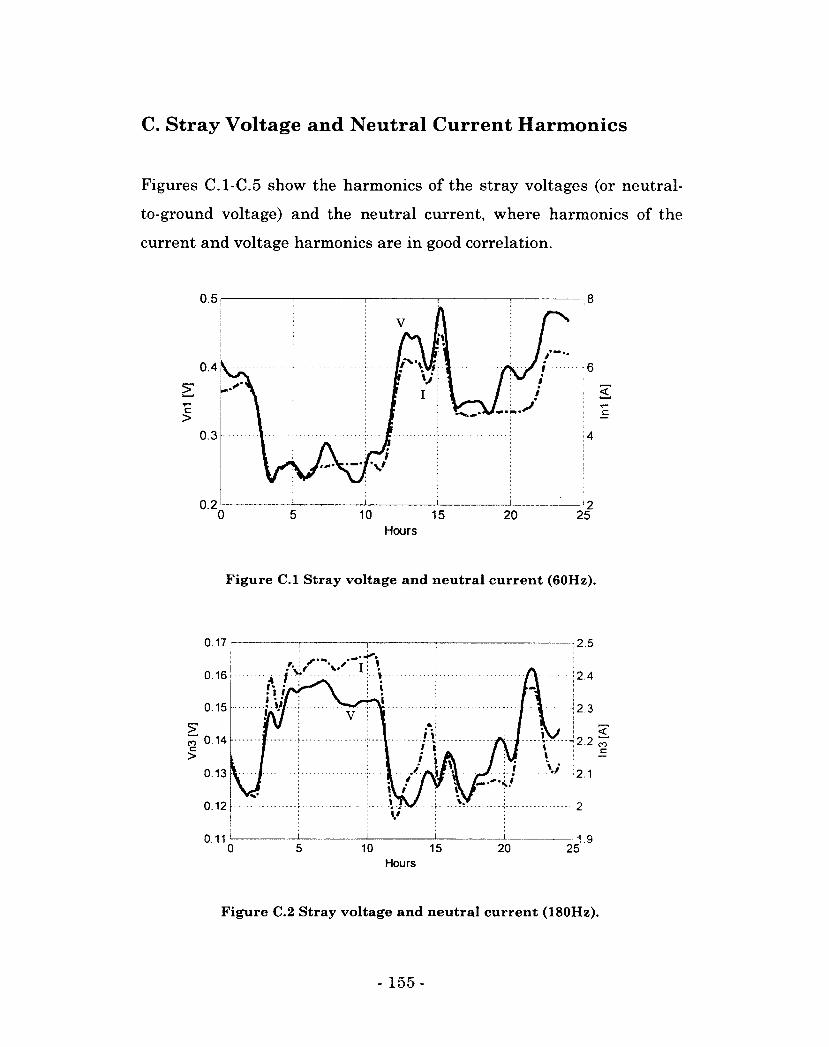
C. Stray Voltage and Neutral Current Harmonics
Figures C.1-C.5 show the harmonics of the stray voltages (or neutral-
to-ground voltage) and the neutral current, where harmonics of the
current and voltage harmonics are in good correlation.
Hours
Figure C.l Stray voltage and neutral current (60Hz).
0.17 2.5
0.16 2.4
0.15 2.3
0.14 2.2
0.13
0.12
11 0 20 25
Hours
Figure C.2 Stray voltage and neutral current (180Hz).
- 155-
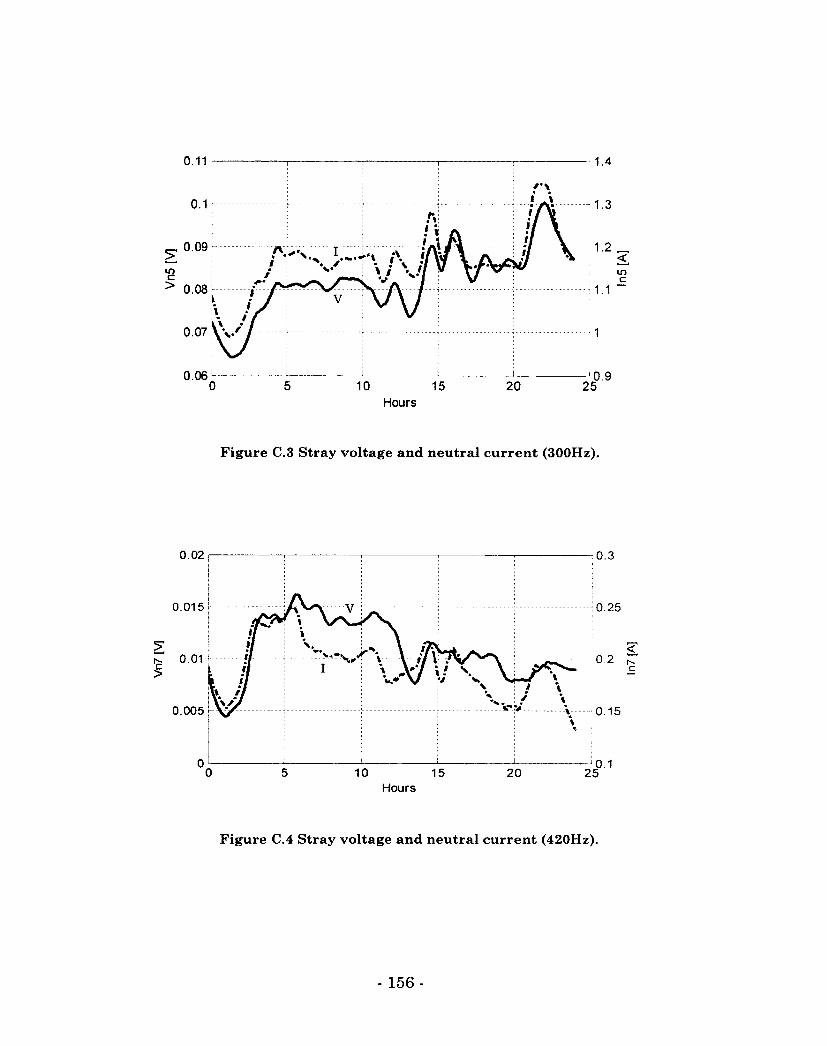
lO c >
0.11
0.1
0.09
0.08
0.07
0.06'
f'\ « '\
+'S. I
!\ i\
% . ' A i\ !f\
\J/\
A
l / w if i if \
}J \
w V
A V f
10 15 Hours
20
1.4
1.3
1.2
1.1
in c
- ' 0 . 9 25
Figure C.3 Stray voltage and neutral current (300Hz).
0.02
0.015
£
0.005
if if il
1 // » il V '/ \* • # Y\y
A/A V \ vv. 1 V
I \ 'ft \ A7 < u* V / \ ^ \ v *» Vn V p A"
\
i
0.3
10 15 Hours
20
0 25
< 0 . 2 "
0.15
25 0.1
Figure C.4 Stray voltage and neutral current (420Hz).
- 156 -
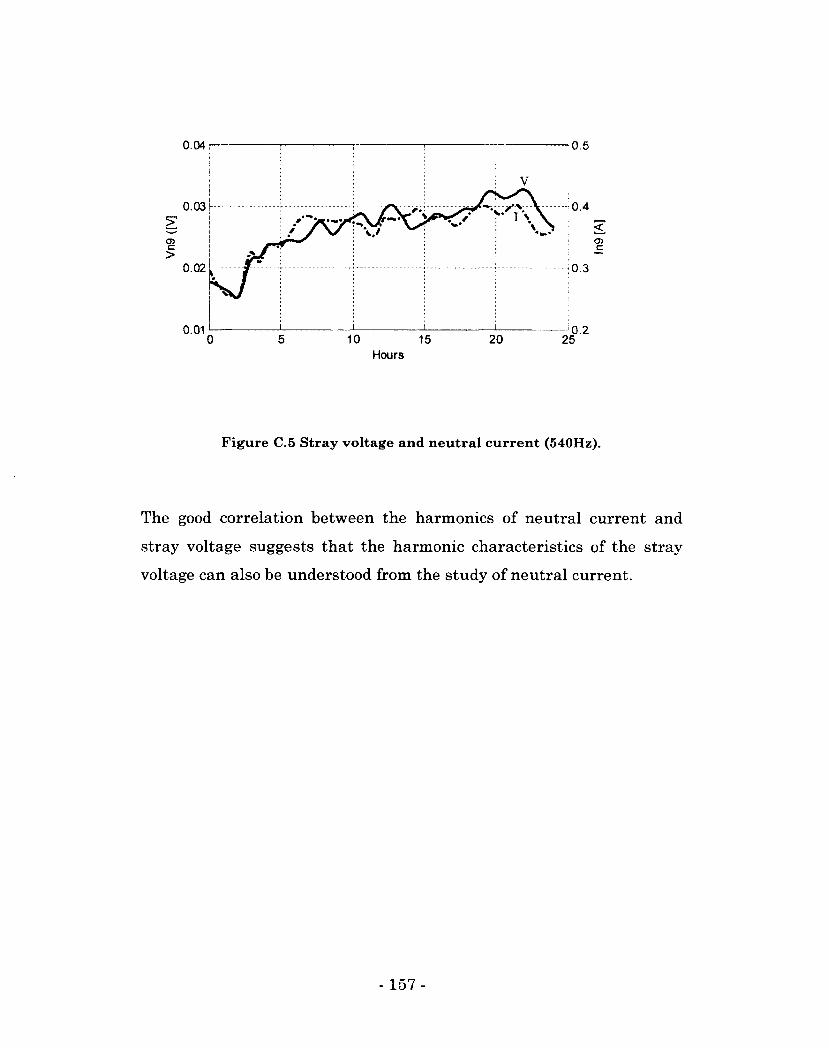
Hours
Figure C.5 Stray voltage and neutral current (540Hz).
The good correlation between the harmonics of neutral current and
stray voltage suggests that the harmonic characteristics of the stray
voltage can also be understood from the study of neutral current.
- 157 -
Related Documents











