i UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS FACULTAD DE INGENIERÍA INGENIERÍA CATASTRAL Y GEODESIA ESTIMACIÓN DE LA SUBSIDENCIA DE LA CIUDAD DE BOGOTÁ MEDIANTE IMÁGENES DE RADAR Y TÉCNICAS DE INTEFEROMETRIA DIFERENCIAL DINSAR ANGIE PAOLA HURTADO ACOSTA PAOLA ANDREA SUAREZ JAIMES BOGOTÁ MAYO DE 2018

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

i
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
FACULTAD DE INGENIERÍA
INGENIERÍA CATASTRAL Y GEODESIA
ESTIMACIÓN DE LA SUBSIDENCIA DE LA CIUDAD DE BOGOTÁ MEDIANTE
IMÁGENES DE RADAR Y TÉCNICAS DE INTEFEROMETRIA DIFERENCIAL
DINSAR
ANGIE PAOLA HURTADO ACOSTA
PAOLA ANDREA SUAREZ JAIMES
BOGOTÁ
MAYO DE 2018

ii
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
FACULTAD DE INGENIERÍA
INGENIERÍA CATASTRAL Y GEODESIA
ESTIMACIÓN DE LA SUBSIDENCIA DE LA CIUDAD DE BOGOTÁ MEDIANTE
IMÁGENES DE RADAR Y TÉCNICAS DE INTEFEROMETRIA DIFERENCIAL
DINSAR
ANGIE PAOLA HURTADO ACOSTA
20121025084
PAOLA ANDREA SUAREZ JAIMES
20121025080
PROYECTO DE GRADO COMO REQUISITO PARCIAL PARA OPTAR AL
TÍTULO DE INGENIERO CATASTRAL Y GEODESTA
DIRECTOR
MSC. JOSÉ LUIS HERRERA ESCORCIA
BOGOTÁ, COLOMBIA
MAYO DE 2018

iii
NOTA DE ACEPTACIÓN
_______________________
_______________________
_______________________
_______________________
________________________________
FIRMA DEL DIRECTOR
JOSÉ LUIS HERRERA ESCORCIA
________________________________
FIRMA DEL JURADO
BOGOTÁ D.C. MAYO DE 2018

iv
Agradecimientos
Agradecemos a la Universidad Distrital Francisco José de Caldas por abrir sus puertas y
recibirnos para la formación y obtención del futuro título de Ingenieras Catastrales y Geodestas.
Especial agradecimiento al Semillero de Investigación GEIPER que hace parte del Grupo
de Investigación NIDE, por permitirnos integrar este grupo con el objetivo de investigar,
reflexionar y buscar soluciones a los problemas que rodean a nuestra comunidad.
Expresamos nuestra gratitud a los profesores de la Universidad Distrital Francisco José de
Caldas por ser una guía en nuestra formación como futuras profesionales.

v
Tabla De Contenido
1. Introducción ....................................................................................................................... 1
2. Descripción Del Problema ................................................................................................. 2
3. Justificación ....................................................................................................................... 3
4. Objetivos ............................................................................................................................ 5
4.1 Objetivo General ......................................................................................................... 5
4.2 Objetivos Específicos .................................................................................................. 5
5. Alcance Del Proyecto ........................................................................................................ 5
6. Estudios Anteriores ............................................................................................................ 6
7. Marco Teórico .................................................................................................................... 9
7.1 Subsidencia.................................................................................................................. 9
7.2 Teledetección ............................................................................................................ 10
7.3 Radar de apertura sintética (SAR) ............................................................................. 12
7.3.1 Principios Básicos. ......................................................................................... 13
7.3.2 Ecuación de Radar .......................................................................................... 15
7.3.3 Características Orbitales ................................................................................. 16
7.3.4 Formación de las Imágenes ............................................................................ 18
7.3.5 Geometría ....................................................................................................... 19
7.3.6 Resolución de las Imágenes ........................................................................... 21
7.4 Interferometria SAR (InSAR) ................................................................................... 22
7.5 Interferometria Diferencial SAR (DInSAR) ............................................................. 29
7.5.1 Fase interferometrica ...................................................................................... 29
7.5.2 Fuentes de ruido en la fase interferometrica. ................................................. 30
7.6 Sentinel 1 ................................................................................................................... 33
7.7 Plataforma de aplicación Sentinel (SNAP) ............................................................... 40
8 Metodología ..................................................................................................................... 41
8.1 Adquisición de datos ................................................................................................. 42
8.2 Corregistro de imágenes ............................................................................................ 43
8.3 Generación del interferograma .................................................................................. 45
8.3.1 Deburst ............................................................................................................ 46
8.4 Remoción de la topografía ........................................................................................ 47
8.5 Filtro Goldstein ......................................................................................................... 47
8.6 Desenvolmiento de la fase......................................................................................... 48
8.7 Estimación de velocidades de deformación del terreno ............................................ 50
8.7.1 Geometría ......................................................................................................... 52

vi
9 Resultados y Análisis ....................................................................................................... 53
9.1 Comparación Subsidencia con los valores del SGC .................................................. 58
9.2 Consecuencias de la subsidencia en la zona de estudio ............................................ 59
10 Conclusiones .................................................................................................................... 64
11 Anexos ............................................................................................................................. 65
12 Referencias ....................................................................................................................... 66
Lista de Figuras:
Figura 1: Subsidencia por extracción de agua. .................................................................... 10
Figura 2: Componentes de un sistema de teledetección. ..................................................... 12
Figura 3: Fase de la señal trasmitida. .................................................................................. 14
Figura 4: Retro-dispersión de la señal en las diferentes superficies. .................................. 18
Figura 5: Relación Rango inclinado y Rango Terrestre. ..................................................... 20
Figura 6: Descripción de Resolución en Azimuth. ............................................................. 22
Figura 7: Geometría básica de la interferometría SAR para la determinación de la altura
topográfica. .......................................................................................................................... 24
Figura 8: Geometría básica de la interferometría SAR para la determinación del
desplazamiento. ................................................................................................................... 27
Figura 9: Diagrama de adquisición de imágenes en un caso de subsidencia entre dos pases
de satélite. ............................................................................................................................ 31
Figura 10: Modos Sentinel-1. .............................................................................................. 35
Figura 11: Disponibilidad de producto operativo para cada nivel. ..................................... 37
Figura 12: Representación gráfica de los productos principales de Sentinel-1................... 38
Figura 13: Metodología. ...................................................................................................... 41
Figura 14: Proceso del Corregistro. .................................................................................... 44
Figura 15: Coherencia estimada entre el par interferometrico de imágenes 10/11/2015 y
4/12/2015. ............................................................................................................................ 46
Figura 16: Interferograma antes y después del deburst ....................................................... 46
Figura 17: Interferograma con filtro Goldstein. .................................................................. 48
Figura 18: Fase enrollada y fase desenrollada. ................................................................... 49

vii
Figura 19: Fase interferometrica desenvuelta. .................................................................... 50
Figura 20: Representación de distorsión en las imágenes. .................................................. 52
Figura 21: Corrección geométrica. ...................................................................................... 53
Figura 22: Subsidencia presentada en el año 2016. ............................................................ 55
Figura 23: Subsidencia presentada en el año 2017 ............................................................. 56
Figura 24: Área afectada por la baja coherencia de los datos existentes. ........................... 57
Figura 25: Ac 72, Localidad de Engativá ............................................................................ 60
Figura 26: Calle 18 con Carrera 69b ................................................................................... 60
Figura 27: Mapa de los valores de subsidencia del área urbana de la ciudad de Bogotá para
el periodo 2016. ................................................................................................................... 63
Figura 28: Mapa de los valores de subsidencia del área urbana de la ciudad de Bogotá para
el periodo 2017. ................................................................................................................... 63
Lista de Tablas:
Tabla 1: Características de las Imágenes del Satélite Sentinel 1 empleadas en el proyecto...42
Tabla 2: Fecha de las imágenes empleadas en el presente proyecto. .................................. 43
Tabla 3: Pares interferómetricos generados, línea base y su resolución temporal. ............ 54
Tabla 4: Valores de máxima subsidencia obtenidos en el presente estudio vs valores
obtenidos por el SGC .......................................................................................................... 58
1
1. Introducción
Una subsidencia es el movimiento lento y progresivo de la superficie topográfica
caracterizado por ser de componente vertical, es decir, hace referencia al hundimiento paulatino
de la corteza terrestre, continental o submarina. La subsidencia terrestre, en la cual se centra el
presente trabajo, es un fenómeno que implica el asentamiento de la superficie terrestre en un
área extensa debido a varios factores, que pueden ser naturales o causados por el impacto de
una gran variedad de actividades humanas (Bear & Corapcioglu, 2012).
La subsidencia es un fenómeno geológico que no suele ocasionar víctimas mortales, aunque
los daños materiales que causa pueden llegar a ser cuantiosos. Es de gran importancia en zonas
urbanas, donde los perjuicios ocasionados pueden llegar a ser ilimitados, suponiendo un riesgo
importante para edificaciones, canales, conducciones, vías de comunicación, así como todo
tipo de construcciones asentadas sobre el terreno que se deforma (Tomás, Herrera, Delgado,
& Peña, 2009).
Dado lo anterior el fenómeno de subsidencia se convierte en una variable de gran
importancia para el desarrollo urbano de Colombia. En los últimos años se han realizado
estudios en los cuales se determina que la principal causa de este fenómeno en los polos de
desarrollo del país es por acción antrópica debido a la explotación de recursos geológicos tal
como es el caso de la minería y extracción de aguas subterráneas. El crecimiento desmesurado
que ha llevado la ciudad de Bogotá en los últimos años ha hecho que los municipios aledaños
se conviertan en ciudades dormitorio y que la capital día a día congregue más personas
provenientes de estos lugares.
Para la estimación de la subsidencia en la ciudad de Bogotá se efectuará un análisis
multitemporal con imágenes de radar de apertura sintética (SAR) aplicando técnicas de
interferometría DInSAR, con las cuales se reducen los efectos atmosféricos y se obtiene un
estudio a gran escala tanto espacial como temporal para la obtención de los valores de las

2
velocidades de deformación del terreno. Los resultados permiten determinar la incidencia de
este fenómeno en la ciudad con el objetivo de implementar estrategias en la toma de decisiones
que orienten y brinden bases sólidas en el ordenamiento y planeación del territorio.
2. Descripción Del Problema
Actualmente Bogotá cuenta con más de 7.500.000 habitantes y es la ciudad más poblada de
Colombia (Departamento Administrativo Nacional de Estadística, 2009) y la sexta en
Latinoamérica (United Nations, 2014). Esta ha presentado en los últimos siglos un crecimiento
acelerado importante por su costado Norte, Occidental, y Sur. Luego de la colonización la
ciudad de Bogotá formo sus primeros asentamientos urbanos en el centro de esta, constituyendo
la localidad de Teusaquillo primordialmente (Rivadeneira, 2001). Con el pasar de los años la
ciudad de Santa Fe de Bogotá como se llamaba hacia los años 1800 fue recibiendo alrededor
de 1000 familias nuevas, es por eso que la ciudad pasa de contar con 21.394 habitantes en 1801
a 100.000 en 1905 y a 200.000 en 1927, ya que entre estos dos años la ciudad creció 3,6 veces
en su tamaño. Luego al llegar al siglo XX la ciudad empezó un crecimiento acelerado
acentuándose más hacia el Norte y el Sur de esta, absorbiendo localidades aledañas tales como
Suba y Engativá que para ese entonces eran municipios independientes (Alcaldía Local de
Suba, 2013).
El agua es un recurso de vital importancia para todos los seres vivos. Del agua contenida en
el planeta, 97% es salada y no es apta para el consumo humano; el 3% restante es agua dulce.
Sin embargo, de este último, 75% se encuentra en forma de hielo en los casquetes polares, 24%
está en el subsuelo y únicamente 1% forma los ríos y los lagos (Saldierna-Ramos, De la Garza-
Requena, Ventura-Houle, Heyer-Rodríguez, & Salinas-Castillo, 2014). Es por esto que el agua
subterránea de la Sabana de Bogotá es de suma importancia para la sostenibilidad y desarrollo
de la población. Según estudios realizados por la Asociación Colombiana de Hidrogeólogos,
existe una disminución de las reservas de agua subterránea en la Sabana, sobre todo en la parte
3
occidental, ya que aproximadamente hace unos cuarenta años se ha empezado a realizar una
explotación desmesurada de estas por la degradación que presentan las corrientes superficiales.
El exceso de extracción de agua entre otras explotaciones realizadas en la Sabana de Bogotá
ha provocado que en la ciudad se presente subsidencia a lo largo de toda su extensión. Es así
como este proyecto pretende apoyar los estudios de subsidencia en la ciudad de Bogotá,
aplicando una metodología de deformación y generación de diferencias de fase (DinSAR)
obtenidas a partir de imágenes de Radar y un post-procesamiento generando interferogramas,
con el fin de obtener una estimación de las zonas y las cantidades métricas de subducción. Una
de las ventajas más notables de la técnica DInSAR y que la hace técnicamente viable es que, a
diferencia de las técnicas tradicionales de monitorización de subsidencias como el GPS y la
nivelación geométrica de precisión, puede cubrir grandes áreas (hasta 10.000 km2), facilitando
la recolección y procesamiento de gran cantidad de datos con un bajo coste (Sillerico,
Marchamalo, Rejas, & Martínez, 2010).
Este estudio se convierte en una herramienta para analizar, organizar y planificar de mejor
manera el territorio, con el fin de que se logre encaminar el ordenamiento de Bogotá, hacia una
ciudad con grandes capacidades y competitiva a nivel mundial.
3. Justificación
La ciudad de Bogotá al ser la capital del País alberga el 20% de toda la población
colombiana, ya que las personas se desplazan al centro del país con el objetivo de mejorar su
calidad de vida. Esta conglomeración de personas hace que se haga cada día más necesario la
búsqueda y expansión de suministro de servicios básicos para la población. Es así como con el
pasar del tiempo se han venido generando sobrexplotaciones a los acuíferos ubicados en la
Sabana de Bogotá. Cabe resaltar que un 80% de la demanda del agua subterránea proviene del
sector agroindustrial y de acueductos municipales y veredales, lo que permite afirmar que la
4
producción económica de la Sabana depende del agua subterránea (Hermelín & Agudelo,
2007).
Según datos proporcionados por el DAMA (Departamento Administrativo del Medio
Ambiente) y la CAR (Corporación Autónoma Regional) afirman que para el año 2004 de 6000
pozos en explotación solo 1600 eran legales, causa por la cual en los últimos años se ha
detectado el descenso de varios metros de los niveles de agua subterránea, presentándose así
subsidencia (Hermelín & Agudelo, 2007).
La revolución digital ha facilitado el proceso de captura, almacenamiento y distribución de
la información, es así como en la actualidad es común encontrarse con un sinfín de imágenes
de las cuales podemos extraer gran cantidad de datos dependiendo del interés; tales como lo
son las imágenes de Radar, las cuales presentan una característica especial, puesto que estas
brindan imágenes en cualquier condición atmosférica, lo que permite realizar un monitoreo de
una zona de estudio constantemente con diferentes técnicas. La Interferometría diferencial
DInSAR es una novedosa técnica de teledetección, en donde se genera un interferograma a
partir de dos imágenes de una misma zona. Además de ser de gran precisión puede llegar a
combinar datos geológicos, morfológicos, sismológicos, etc., por lo que se muestra muy eficaz
a la hora de generar cuantificación de deformaciones superficiales en el terreno (Delgado et al.,
2011; Sousa et al., 2010; Tomás et al., 2010).
Las grandes técnicas de la teledetección pretenden obtener información de fenómenos
presentados en un espacio geográfico determinado sin necesidad de estar en contacto con este;
de ahí el interés en realizar un estudio donde se pueda identificar el nivel de subsidencia que
está teniendo la ciudad de Bogotá, con técnicas que no obliguen a estar en contacto con el
territorio, además de brindar una guía para la planificación del territorio en donde la
subsidencia sea una variable a tener en cuenta para la toma de decisiones.

5
4. Objetivos
4.1 Objetivo General
Implementar la técnica de interferometria diferencial DInSAR para obtener la subsidencia
de la ciudad de Bogotá, haciendo uso de las imágenes del satélite SENTINEL.
4.2 Objetivos Específicos
1. Analizar y procesar interferogramas formados con pares de imágenes SENTINEL
obtenidas desde el año 2015 hasta el año 2017.
2. Obtener los valores métricos de subsidencia para la zona de estudio.
3. Generar cartografía que permita identificar los diferentes niveles de subsidencia que se
presentan en el área urbana de la ciudad de Bogotá.
5. Alcance Del Proyecto
Este proyecto se desarrollará en la zona urbana de la cuidad de Bogotá, y es allí donde se
hará la medición de la subsidencia mediante la información obtenida por las imágenes de Radar
de apertura sintética (SAR) aplicando técnicas de interferometría DInSAR.
Se pretende que las imágenes obtenidas del satélite SENTINEL puedan ser procesadas, y se
den en un intervalo de tiempo no muy grande, con el fin de obtener la correlación adecuada
entre estas, y una información final coherente respecto a los valores métricos de subsidencia
presentados en la ciudad, respondiendo a preguntas como:
• ¿La ciudad de Bogotá presenta subsidencia a lo largo de toda su extensión?
• ¿Cuál es el valor métrico de subsidencia de la ciudad de Bogotá en determinado
periodo de tiempo?
• ¿Cuáles son los lugares de la ciudad donde se presenta mayor subsidencia?
• ¿Es importante tener en cuenta los valores de subsidencia cuando se habla de
planificación del territorio?
6
La información insumo para este proyecto será obtenida a través de la ESA (Agencia
Espacial Europea) y su misión Sentinel-1 desarrollada por la iniciativa Copérnico, la cual
proporciona imágenes de Radar de características SAR en la banda C. Así mismo se usará el
software SNAP proporcionado por la misma compañía y en complemento a esto se hará uso
del software SNAPHU con el fin de obtener resultados óptimos.
6. Estudios Anteriores
En la ciudad de Bogotá el fenómeno de subsidencia se ha venido estudiando desde los años
90 y fue INGEOMINAS la entidad que tuvo mayores avances entre 1996 y 1999 con ocasión
de los estudios de Microzonificación Sísmica de Bogotá, el cual realizó para el Distrito. En los
citados estudios se obtuvo valiosa información sobre los suelos de Bogotá, se realizó una
caracterización en profundidad de los depósitos de arcilla, se instalaron y monitorearon
piezómetros en diferentes sitios y se hicieron mediciones de deformaciones, todo ello mediante
la instalación de una red que lamentablemente no existente hoy en día (Sánchez, Arciniegas,
& Abaunza, 2010).
El Instituto Geográfico de Cataluña realizo un monitoreo de subsidencia de la ciudad de
Bogotá entre el año 2006 al 2008 mediante la aplicación de técnicas DInSAR, en donde se
vincularon para ello a diferentes actores entre los que se encuentran el Instituto Geográfico
Agustín Codazzi - IGAC, el Instituto Colombiano de Geología y Minería – INGEOMINAS,
las diferentes entidades que conforman el Sistema Distrital de Prevención y Atención de
Emergencias – SDPAE y en especial la Secretaría Distrital de Ambiente – SDA y el instituto
de Desarrollo Urbano - IDU, la Universidad Nacional de Colombia y las empresas prestadores
de servicios públicos de la ciudad, con el fin de reunir esfuerzos y realizar la gestión necesaria
para comprender los resultados de la aplicación de la técnica DInSAR, realizar transferencia
de conocimiento y emprender las acciones necesarias para la mitigación de eventuales efectos
sobre el territorio urbano y rural de la ciudad (Sánchez et al., 2010).

7
Por otra parte, en el periodo comprendido entre 2006 y 2009, se realizó un estudio de
subsidencia co-eruptiva en el volcán Galeras mediante técnicas InSAR, en donde se utilizaron
datos de radar de banda L (23,6 cm de longitud de onda) adquiridos, para estudiar 15 volcanes
activos a lo largo del segmento colombiano de la Zona Volcánica del Norte. Se realizó el
análisis de 100 interferogramas, lo que mostró que la mayoría de los volcanes no se
deformaban. Sin embargo, los interferogramas independientes muestran un hundimiento
promedio de 3 cm en el flanco noreste de Galeras, coincidiendo con la erupción de enero de
2008. Se combinaron datos InSAR, mediciones de campo y modelado de fuentes para
determinar el origen, tamaño y ubicación de la fuente de hundimiento en Galeras. Los
resultados sugieren que la señal fue causada por la deflación de la cámara de magma asociada
con el evento de enero de 2008. El modelado da una idea de la profundidad a la fuente (~ 2
km) y un cambio de volumen (-6,5 × 105 m3 ) que es consistente con el derivado del modelado
de las inclinaciones contemporáneas y el volumen de material erupcionado. Los resultados de
InSAR corroboran la hipótesis de almacenaje magmático bajo Galeras y proporcionan la
primera pieza de evidencia que se puede vincular a una erupción en particular (Parks, Mather,
Amelung, & Medina, 2011).
El volcán del Nevado del Ruiz también fue observado mediante imágenes de radar de
apertura sintética interferométrica del satélite RADARSAT-2, en donde desde el 2011
muestran una inflación constante del volcán de 3-4 cm / año. El amplio patrón de deformación
(> 20 km) de los datos ascendentes y descendentes restringe los modelos fuente tanto para
fuentes puntuales como esferoidales, situadas a 14 km debajo de la superficie (elevación media
de 4,2 km) y 10 km SW del Nevado del Ruiz, bajo el cercano volcán Santa Isabel. Los cálculos
del cambio de tensión para ambas fuentes en el contexto de un esfuerzo regional compresivo
indican que los diques que se propagan desde la fuente deberían quedar atrapados en los
umbrales, lo que podría conducir a una vía más compleja a la superficie y explicar la
8
significativa separación lateral de la fuente y el volcán del Nevado del Ruiz (Lundgren &
López, 2015).
Se han presentado otro tipo de estudios, en donde se combinan nuevas observaciones de la
deformación del volcán en América Latina con más de 100 estudios previos de deformación
en otras áreas del mundo para restringir la frecuencia, magnitud y duración de los eventos de
deformación de los volcanes subaeriales. Se discuten las implicaciones para los peligros
eruptivos de un evento de deformación dado y el intervalo de repetición óptimo para las
misiones de satélite InSAR propuestas. Se utilizó radar de apertura sintética (InSAR) basado
en satélites de banda L (23,6 cm de longitud de onda) para realizar la primera búsqueda
sistemática de deformación en todos los arcos volcánicos de América Latina (incluyendo
México, Centroamérica, el Caribe y los Andes septentrionales y meridionales), que abarca
2006-2008. Se combinaron las observaciones InSAR de la banda L y C (5,6 cm de longitud de
onda) sobre los volcanes del sur de los Andes para extender las series de tiempo de 2002 a 2008
y evaluar las capacidades de los diferentes radares: la banda L da resultados superiores en áreas
altamente vegetadas. Estas observaciones revelan 11 áreas de deformación del volcán, algunas
de ellas en áreas que se creían inactivas. Hay una falta de deformación observada en varios
volcanes en erupción, probablemente debido al aliasing temporal. El número total de volcanes
deformes en los Andes centrales y meridionales alcanza ahora 15 (de observaciones entre 1992
y 2008), comparable al arco Alaska / Aleutian. A nivel mundial, los volcanes se deforman a
través de una variedad de escalas de tiempo (de segundos a siglos) a menudo sin erupción y sin
ninguna escala de tiempo de observación crítica aparente, aunque las observaciones cada
minuto son a veces necesarias para ver los precursores de la erupción. (Fournier & Ridicck,
2010).

9
7. Marco Teórico
7.1 Subsidencia
El servicio geológico de los estados unidos (USGS) en el informe 1182 (Galloway, Jones,
& Ingebritsen, 1999) define subsidencia como el asentamiento gradual o hundimiento
repentino de la superficie de la tierra debido a un movimiento subsuperficial de los materiales
de la tierra. Por otra parte, en el “Dictionary of Mining, Mineral, and Related Terms” editado
por la oficina de minas de Estados Unidos en 1996 se define como el hundimiento inesperado
o asentamiento gradual descendiente de la superficie de la tierra sin movimiento horizontal o
con movimiento horizontal pequeño. Este movimiento no está restringido en tasa, magnitud ni
área implicada. Puede estar causada por procesos geológicos naturales, como disolución,
deshielo, compactación, deformación lenta de la corteza o retirada de lava fluida por debajo de
la corteza sólida, o por actividades humanas, como minería subsuperficial o la extracción de
petróleo o agua subterránea (Fernández, 2009).
La subsidencia se clasifica en dos grupos ENDÓGENA, causada por procesos originados
dentro del planeta es decir asociados a procesos geológicos internos, y EXÓGENA, la cual
hace referencia a los procesos de deformación superficial relacionados con la compactación
natural o antrópica de los suelos (Prokopovich, 1986; Tomás et al., 2009).
La subsidencia se comenzó a considerar como uno de los fenómenos geológicos
preocupantes para los seres humanos durante el siglo XX, ya que el incremento de la población
y la industrialización conllevan a un aumento exponencial del consumo de agua, y por lo tanto
una mayor necesidad de uso de recursos hídricos, incluida la explotación intensiva de acuíferos,
lo que tiene como consecuencia un aumento del número y superficie de zonas afectadas por
subsidencia originada por causas antrópicas, que generalmente se asocia con la explotación de
los recursos hídricos subterráneos (Abellaneda Lario, 2016).

10
En la figura 1 se muestra como la extracción de fluidos (agua, gas o petróleo) desde el
terreno puede causar importantes valores de subsidencia como consecuencia del cierre gradual
de los huecos rellenos por el fluido extraído (Tomás et al., 2009).
Figura 1: Subsidencia por extracción de agua.
Fuente: (Tomás et al., 2009).
7.2 Teledetección
La teledetección es la recopilación de datos a distancia, ya sea de un objeto o área. En el
campo de las ciencias de la Tierra la teledetección es entendida como una técnica que tiene por
objeto la captura, tratamiento y análisis de imágenes digitales tomadas desde satélites
artificiales (Pérez & Muñoz, 2006). En la mayoría de los casos, la percepción remota implica
la lectura activa o pasiva de una variedad de radiaciones del espectro electromagnético a
medida que se emiten, reflejan o dispersan del objeto o fenómeno observado. También se
pueden usar otras señales propagadas (como ondas de sonido) (Blumenthal, 2013).
La teledetección espacial ofrece ventajas únicas frente a otros medios de observación de la
Tierra debido a que los sensores están ubicados en plataformas espaciales y cubren

11
prácticamente la totalidad de la superficie del planeta y, por ello, nos proporcionan datos sobre
zonas remotas y de difícil acceso, océanos y regiones cubiertas por hielo donde, de no ser por
esta técnica, la información sería difícil de conseguir. La visión sinóptica de amplias zonas del
planeta permite la observación de fenómenos (relieve, estructuras geológicas, dinámica litoral
y marina, distribución de coberturas y suelo) que no serían identificables trabajando a escalas
más detalladas. Estas ventajas son válidas tanto para territorios geográficamente amplios como
pequeños dada la disponibilidad de imágenes de diferente resolución espacial (mínimo detalle
espacial (píxel) que registra un sensor) (Sobrino & Rodríguez, 2001).
Como lo establece (Chuvieco, 1995) y como se puede observar en la figura 2 un sistema de
teledetección está compuesto por los siguientes elementos:
1. Fuente de Energía: Es el emisor de la radiación electromagnética que llegara a la
superficie terrestre y que posteriormente será detectada por el sensor. Puede ser el sol
(como fuente natural - sensores pasivos) o el mismo sensor (como fuente artificial -
sensores activos).
2. Cubierta Terrestre: Formada por distintas masas de vegetación, suelo, agua o
infraestructura. Esta recibe la radiación electromagnética proveniente de la fuente de
energía, y la refleja o emite de acuerdo a sus características físicas.
3. Sistema Sensor: Constituido por el sensor mismo y la plataforma que lo sustenta. El
sistema tiene como función captar la energía emitida por la cubierta terrestre,
codificarla y grabarla o enviarla directamente al sistema de recepción.
4. Sistema de recepción: Este sistema recibe la información transmitida por la plataforma
y la guarda en un formato específico y apropiado.
5. Tratamiento visual y digital: Es la persona encargada de clasificar y analizar la
información contenida en la imagen para generar información temática.

12
6. Usuario Final: Es quien finalmente recibirá y utilizará la información ya procesada por
el analista para fines específicos.
Figura 2: Componentes de un sistema de teledetección.
Fuente: (Chuvieco, 1995).
7.3 Radar de apertura sintética (SAR)
Synthetic Aperture Radar (SAR) es un sistema de imágenes de microondas. Tiene
capacidades de penetración de nubes porque usa microondas y posee capacidades operativas
diurnas y nocturnas porque es un sistema activo. Finalmente, su configuración interferométrica,
Interferometria SAR o InSAR, permite mediciones precisas de la ruta de recorrido de la
radiación porque es coherente. Las mediciones de las variaciones de la trayectoria de
desplazamiento en función de la posición del satélite y el tiempo de adquisición permiten la
generación de modelos digitales de elevación (DEM) y la medición de las deformaciones
centimétricas de la superficie del terreno (Fletcher, Monti-Guarnieri, Prati, & Rocca, 2007).

13
7.3.1 Principios Básicos.
Según (Wasowski, 2006), la imagen generada por un SAR forma una matriz de valores
complejos donde la amplitud es un mapa de la reflectividad del suelo del área escaneada y la
fase depende de la reflectividad local y de la distancia del sensor al objetivo (slant range o
dirección de línea de vista – LOS “Line of Sight direction”); es decir, una matriz bidimensional
formada por columnas y filas de elementos de imagen pequeña (píxeles). Cada píxel está
asociado con un área pequeña de la superficie de la Tierra (llamada celda de resolución). Cada
píxel proporciona un número complejo que transporta la información de amplitud y fase sobre
el campo de microondas retrodispersada por todos los difuminadores (rocas, vegetación,
edificios, etc.) dentro de la celda de resolución correspondiente proyectada en el suelo (citado
por Fletcher et al., 2007).
Diferentes filas de la imagen están asociadas con diferentes ubicaciones de azimut, mientras
que diferentes columnas indican diferentes ubicaciones de rango inclinado. La ubicación y la
dimensión de la celda de resolución en azimut y coordenadas de rango inclinado dependen
únicamente de las características del sistema SAR (Fletcher et al., 2007).
Un satélite lleva un radar con la antena apuntando a la superficie de la Tierra en el plano
perpendicular a la órbita. La inclinación de la antena con respecto al nadir se denomina ángulo
fuera del nadir y en los sistemas contemporáneos suele estar en el rango entre 20 ° y 50 °.
Debido a la curvatura de la superficie de la Tierra, el ángulo de incidencia de la radiación en
un terreno plano horizontal es mayor que se encuentra fuera del nadir (Fletcher et al., 2007).
Los sistemas operacionales de satélites SAR funcionan en una de las siguientes bandas de
microondas (ya sea de constelaciones en órbita actualmente, como de satélites que ya no están
en órbita, pero que las imágenes tomadas están disponibles):
• Banda C: 5.3 GHz (ERS, Envisat de la ESA, y las misiones de transbordador de los
EE. UU., Radarsart-1, Radartsat-2)

14
• Banda L: 1.2 GHz (la J-ERS japonesa y ALOS/ALOS-2)
• Banda X - 10 GHz (el X-SAR alemán-italiano en las misiones del transbordador,
TerraSAR-X).
La radiación transmitida desde el radar debe alcanzar a los dispersores en el suelo y luego
volver al radar para formar la imagen SAR (viaje bidireccional). Los dispersores a diferentes
distancias del radar (diferentes rangos de inclinación) introducen diferentes retrasos entre la
transmisión y la recepción de la radiación. Debido a la naturaleza casi puramente sinusoidal de
la señal transmitida, este retardo τ es equivalente a un cambio de fase φ entre señales
transmitidas y recibidas. El cambio de fase es, por tanto, proporcional a la distancia de recorrido
bidireccional 2R de la radiación dividida por la longitud de onda transmitida λ (Fletcher et al.,
2007).
Figura 3: Fase de la señal trasmitida.
Fuente: (Fletcher et al., 2007)
Sin embargo, debido a la naturaleza periódica de la señal, las distancias de viaje que difieren
en un múltiplo entero de la longitud de onda introducen exactamente el mismo cambio de fase.
En otras palabras, la fase de la señal SAR es una medida de solo la última fracción de la
distancia de recorrido bidireccional que es más pequeña que la longitud de onda transmitida.

15
En la práctica, debido a la enorme relación entre la dimensión de celda de resolución (del orden
de algunos metros) y la longitud de onda, el cambio de fase que pasa de un píxel a otro dentro
de una única imagen SAR parece aleatorio y sin utilidad práctica (Fletcher et al., 2007).
7.3.2 Ecuación de Radar
La ecuación de radar permite evaluar las características y factores que influyen en el
rendimiento de esta, representada por la señal recibida (𝑃𝑟) como:
𝑃𝑟 =𝑃𝑡 𝐺𝑡
4𝜋 𝑅2 ∗𝜎
4𝜋𝑅2 ∗ 𝐴𝑒 (1)
El lado derecho de la ecuación se ha escrito como el producto de tres factores para
representar los procesos físicos que tienen lugar. El primer factor es la densidad de potencia a
distancia 𝑅 metros de un radar que irradia un poder de 𝑃𝑡 vatios de una antena de ganancia 𝐺𝑡.
El numerador del segundo factor es la sección transversal del objetivo a en metros cuadrados.
El denominador explica la divergencia en la ruta de retorno de la radiación electromagnética
con rango. El producto de los primeros dos términos representa la potencia por metro cuadrado
devuelto al radar. La antena del área efectiva de apertura 𝐴𝑒 intercepta una parte de esta
potencia en una cantidad dada por el producto de los tres factores. Si el rango máximo del radar
𝑅𝑚𝑎𝑥 se define como el resultado de que la potencia recibida 𝑃𝑟 sea igual a la señal detectable
mínima de receptor 𝑆𝑚𝑖𝑛, la ecuación de radar puede escribirse de la siguiente manera (Skolnik,
1962).
𝑅4𝑚𝑎𝑥 =
𝑃𝑡𝐺𝑡𝐴𝑒𝜎
(4𝜋)2𝑆𝑚𝑖𝑛 (2)
Cuando se usa la misma antena para transmitir y recibir, la ganancia trasmitida 𝐺𝑡 y la
apertura de recepción efectiva 𝐴𝑒 están relacionadas por (Skolnik, 1962).
𝐺𝑡 =4𝜋𝐴𝑒
𝜆2 (3)

16
Donde 𝜆 es la longitud de onda de la energía electromagnética del radar. Sustituyendo (3)
en (2) se obtiene otras dos formas de la ecuación de radar (Skolnik, 1962):
𝑅4𝑚𝑎𝑥 =
𝑃𝑡𝐺𝑡2𝜆2𝜎
(4𝜋)3𝑆𝑚𝑖𝑛 (4)
𝑅4𝑚𝑎𝑥 =
𝑃𝑡𝐴𝑒2𝜎
4𝜋𝜆2𝑆𝑚𝑖𝑛 (5)
𝜎 es expresada en términos de las resoluciones del azimut 𝛿𝑎𝑧 y el rango 𝛿𝑟𝑎, la
reflectividad del terreno 𝜌. Esta sección eficaz se iguala a la reflectividad del terreno
multiplicada por el área proyectada. Esta proyección la denota como sin𝜓. Con esto, la
expresión para la sección eficaz de retro-dispersión en términos de los parámetros de resolución
del azimut y el rango, la reflectividad y el área proyectada se describe como (Skolnik, 1962):
𝜎 = 𝜌𝛿𝑎𝑧𝛿𝑟𝑎 sin𝜓 (6)
7.3.3 Características Orbitales
Los SAR operan generalmente desde plataformas satelitales, la velocidad y posición de
dichas plataformas se ven condicionadas por las dinámicas orbitales y las leyes de keppler,
debido a esto para lograr obtener información de una zona de interés, los SBR (Sistemas de
Radar Satelital) dependen de la tasa de rotación de la tierra, de la posición del satélite a lo largo
de la órbita y de la vista geométrica del radar. Las características anteriores deben tenerse en
cuenta a la hora de diseñar las misiones de los sistemas SBR, es decir que debe incluirse la
altitud orbital, la velocidad de la plataforma satelital en órbita, el periodo de revista que tendrá
el sistema, la inclinación orbital y la tasa de rotación del planeta (Skolnik, 1962).
Las orbitas en las que operan generalmente los SBR, son orbitas circulares cercanas a la
tierra o LEO (Low Earth Orbit) por sus siglas en inglés, las cuales tienen alturas que van desde
los 500 km hasta los 850 km (Skolnik, 1962).

17
El comportamiento periódico del campo magnético de la Tierra en una órbita polar y la
polarización del momento angular con la carga de las ruedas de reacción permiten a los
magnetotores mantener esta velocidad de cabeceo mientras se alinea el eje Y de la nave espacial
con la órbita normal, que en un atardecer - La órbita del día coincide con la dirección del Sol
(Kramer, 2002). Cuando comienza el despliegue de apéndices, el efecto del par de gradiente
de gravedad domina sobre el par magnético, lo que resulta en la alineación del eje S / CX (eje
de apéndices) con la dirección nadir, manteniendo así una tasa de paso igual al período orbital.
En el telemando terrestre, se produce una transición al NPM (Modo de señalización normal),
donde la nave realiza un control de actitud fino basado en el uso de ruedas de reacción en
circuito cerrado con seguidores de estrellas, giroscopios y GPS, y magnetotractores para la
descarga de ruedas (Kim & Lu, 2018).
El satélite Sentinel 1 presenta una órbita SSO (órbita sincrónica del sol) ciclo de repetición
de 12 días LTAN (Hora Local en el Nodo Ascendente) = 18:00 horas, a una altitud de 693 km.
Se requiere un control de órbita estricto para el sistema Sentinel-1. La posición de los satélites
a lo largo de la órbita debe ser muy precisa, tanto en términos de precisión como de
conocimiento, junto con el señalamiento y sincronización / sincronización entre pares
interferométricos. El control de posicionamiento de la órbita para Sentinel-1 se define por
medio de un "tubo" orbital fijo en la Tierra de 50 m (rms) de ancho en radio alrededor de una
ruta operativa nominal. El satélite se mantiene dentro de dicho tubo durante la mayor parte de
su vida operativa (Kim & Lu, 2018).
Las orbitas altas implican un mayor rango en el radar, así como mayores niveles de
radiación, y ángulos de incidencia menores, mientras que las orbitas bajas pueden incidir en
una mayor resistencia atmosférica, por lo cual ninguna de las opciones anteriores es deseable
a la hora de obtener un buen producto, preferiblemente evitar los extremos; por otro lado, las

18
velocidades de los SBR que operan en orbitas LEO, están en el orden de los 7,5 km/seg y con
periodos cercanos a los 100 minutos (Skolnik, 1962).
7.3.4 Formación de las Imágenes
La imagen SAR detectada contiene una medida de la amplitud de la radiación
retrodispersada hacia el radar por los objetos (dispersores) contenido en cada celda de
resolución SAR. Esta amplitud depende más de la aspereza que en la composición química de
los dispersores en el terreno. Típicamente, las rocas expuestas y las áreas urbanas muestran
fuertes amplitudes, mientras que las superficies planas lisas (como las cuencas de agua
tranquilas) muestran amplitudes bajas, ya que la radiación se refleja principalmente fuera del
radar. La imagen SAR detectada generalmente se visualiza mediante escala de niveles de grises
(Fletcher et al., 2007).
Teniendo en cuenta el funcionamiento básico de un sensor de radar, que emite pulsos de
energía de una forma específica (frecuencia, dirección, orientación, etc.) y luego recibir el eco
o la retrodispersión de la misma, produce una imagen cuyos pixeles son entendidos como los
coeficientes de retro-dispersión del área que representa sobre el terreno, esta respuesta o este
coeficiente, dependerá de factores como las condiciones del terreno (rugosidad, tipo de
superficie, pendiente, sombras, etc.) el ángulo de incidencia y la polarización de la observación
(Mayorga, 2013).
Figura 4: Retro-dispersión de la señal en las diferentes superficies.
Fuente: (Arbiol, 2014).

19
La rugosidad del terreno es una característica que tiene influencia sobre la intensidad del
eco recibido, que será mayor cuanto más elevada sea la rigurosidad. Además de esto, también
influyen la longitud de onda y la variación de altura. Cuando un radar emite energía (haz de
microondas) hacia la superficie, esta puede dispersarse hacia el exterior o el interior de los
objetos sobre dicha superficie dependiendo de la polarización y la frecuencia utilizados; vale
la pena mencionar que el nivel de penetración será proporcional a la amplitud de la onda, es
decir a la banda seleccionada o adquirida. Dependiendo de la ubicación de las superficies con
pendiente respecto del sensor que emite el haz de microondas, la dispersión será más fuerte
cuando la pendiente de la superficie está hacia el sensor. Esto hace que se vean más brillantes
en las imágenes de radar, por el contrario, las superficies con pendiente contraria al sensor
aparecerán oscuras o con sombras (SARMAP, 2009).
7.3.5 Geometría
Debido a la plataforma con la que cuentan los sistemas SAR se presenta un movimiento
subsecuente, el cual provee un escaneo a lo largo de la trayectoria de vuelo en dirección
azimutal, de esta manera el haz del radar es dirigido hacia los lados y hacia debajo de la
superficie, generalmente en dirección perpendicular a la trayectoria usando un ángulo
esquineado (Skolnik, 1962).
El haz es ancho en la dirección vertical y se interseca con la superficie en un ovalo con el
eje extendido en la dirección de la trayectoria cruzada o rango, el eco que se recibe desde los
puntos de la superficie, se recibe en un rango creciente, lo que logra que la digitalización de la
señal en el tiempo proporcione un escaneo en la dirección del rango, siendo esta dirección
determinada por el lado en el que el radar mire la escena (Skolnik, 1962).
• Geometría en rango: La posición de un objetivo es una función del tiempo de
transito del pulso que se da entre el sensor y dicho objetivo, sin embargo, esta
función es proporcional a la distancia entre ellos. El plano de la imagen del radar se

20
puede considerar como cualquier plano que contiene la trayectoria de vuelo del
sensor, en este caso la proyección de los puntos de objetos individuales en dicho
plano se llama plano de inclinación o slant range, el cual es proporcional a la
distancia del sensor, lo que causa una compresión no lineal de la información de la
superficie de la imagen (Skolnik, 1962).
• Geometría de rango inclinado (slant range) vs geometría de rango terrestre
(ground range): La geometría original de los datos SAR, corresponde a un rango
inclinado, donde los datos son proyectados desde este a un rango terrestre. Los datos
SAR proyectados al rango terrestre, tampoco se encuentran referenciados a un
sistema cartográfico, por lo que no cuentan con una corrección geométrica, por esta
razón la única manera de geo codificar de manera correcta los datos SAR, es
mediante la aplicación de un enfoque riguroso del doppler aprovechando los datos
SAR, con su geometría en rango inclinado original (SARMAP, 2009).
Figura 5: Relación Rango inclinado y Rango Terrestre.
Fuente: (Sánchez, 2014).
• Geometría azimutal: La frecuenta de la señal retro dispersada depende de la
velocidad relativa que existe entre el sensor y el objetivo, de esta manera, debido a

21
que la antena se va moviendo hacia los objetivos, partes de la señal que es reflejada
por estos, se van a registrar con una frecuencia mayor que la emitida por el sensor
(SARMAP, 2009).
7.3.6 Resolución de las Imágenes
La resolución espacial de las imágenes de radar es determinada a partir del tamaño de la
antena, la duración del pulso denominado como 𝜏 y la extensión del haz (SARMAP, 2009). La
Resolución en una imagen de Radar viene dada en 2 componentes, los cuales son:
• Resolución en Rango: La resolución de rango de un sistema de radar pulsado está
limitada fundamentalmente por el ancho de banda del pulso transmitido. Se puede
lograr un amplio ancho de banda con un impulso de corta duración. Sin embargo,
cuanto más corto es el pulso, menor es la energía transmitida y más pobre es la
resolución radiométrica. Para preservar la resolución radiométrica, los sistemas SAR
generan un pulso largo con una modulación de frecuencia lineal (SARMAP, 2009).
𝑅𝑒𝑠𝑅𝑎𝑛𝑔𝑜 =𝑐𝜏
2 (7)
Donde 𝑐 es la velocidad de la luz y 𝜏 la duración del pulso.
• Resolución en Azimuth: En comparación con RAR (Radar de apertura real), SAR
aumenta sintéticamente el tamaño de la antena para aumentar el azimut y la
resolución a través de la misma técnica de compresión de pulsos adoptada para la
dirección del rango. El procesamiento de apertura sintética es un procesamiento de
datos complicado de señales y fases recibidas de objetivos en movimiento con una
antena pequeña, cuyo efecto se convierte al efecto de una antena grande, que es una
longitud de apertura sintética. La resolución de azimut resultante es dada por la mitad
del radar de apertura real como se muestra a continuación:
𝐴𝑛𝑐ℎ𝑜 𝑑𝑒 ℎ𝑎𝑧 𝑟𝑒𝑎𝑙 𝛽 = λ 𝐷⁄ (8)

22
𝑅𝑒𝑠𝑜𝑙𝑢𝑐𝑖ó𝑛 𝑟𝑒𝑎𝑙 ∆𝐿 = 𝛽𝑅 = 𝐿𝑠 (𝐿𝑜𝑛𝑔𝑖𝑡𝑢𝑑 𝑎𝑝𝑒𝑟𝑡𝑢𝑟𝑎 𝑠𝑖𝑛𝑡é𝑡𝑖𝑐𝑎) (9)
𝐴𝑛𝑐ℎ𝑜 𝑑𝑒 ℎ𝑎𝑧 𝑠𝑖𝑛𝑡é𝑡𝑖𝑐𝑜 𝛽𝑠 = (λ2⁄ )*𝐿𝑠 = 𝐷 (2 ∗ 𝑅)⁄ (10)
𝑅𝑒𝑠𝑜𝑙𝑢𝑐𝑖ó𝑛 𝑠𝑖𝑛𝑡é𝑡𝑖𝑐𝑎 ∆𝐿𝑠 = (𝛽𝑠*𝑅) = 𝐷 2⁄ (11)
En este caso, (𝜆) es la microonda, 𝐷 la apertura del radar, y 𝑅 la distancia de la antena
al objetivo, por esta razón los sistemas SAR poseen una alta resolución azimutal a pesar
de tener un tamaño pequeño de antena, y es independiente del rango inclinado y de la
altitud del satélite (SARMAP, 2009).
Figura 6: Descripción de Resolución en Azimuth.
Fuente: (SARMAP, 2009)
7.4 Interferometria SAR (InSAR)
La interferometría se centra en el estudio y explotación de la información proporcionada por
las imágenes de fase de las imágenes complejas SAR (Hanssen, 2001). La información puede
ser obtenida por dos satélites SAR los cuales pueden observar la misma área desde ángulos de
aspecto ligeramente diferentes o de un solo satélite que adquiere 2 imágenes en periodos de
tiempo diferentes (Fletcher et al., 2007). Así pues usando imágenes adquiridas desde puntos de
vista ligeramente distintos se puede obtener información de la topografía de la superficie (caso
de la generación de Modelos Digitales de Elevaciones DEM con interferometria SAR) y
23
también estudiar los desplazamientos que se han producido (caso de la interferometria
Diferencial SAR, DInSAR) (Fernández, 2009).
InSAR es un sistema de imágenes SAR, que tiene una configuración interferométrica en el
cual se emplean técnicas en las que se combinan los cambios de fase de las señales de
microondas reflejadas y los patrones formados a través del proceso de combinación se
investigan para extraer información útil asociada con las señales. Hay dos métodos de
interferometría SAR (Keydel,2005; citado por Ogundare, 2015).
1. Método de interferometría de paso único: Dos antenas (una maestra y la otra esclava)
se colocan en la misma plataforma y simultáneamente adquieren imágenes de la misma
escena desde dos ángulos diferentes. Las diferencias de fase relativas de las dos
imágenes se utilizan para construir un DEM.
2. Método de interferometría de repetición de paso: El mismo sensor captura un par de
imágenes en diferentes momentos. En este método, las escenas se adquieren con una
geometría de visualización probablemente diferente, sin embargo, deben tener una
geometría bastante similar para permitir la extracción de las diferencias de fase relativas,
lo que requiere que el satélite esté en una órbita de repetición exacta. El término InSAR
se asocia más comúnmente con interferometría de repetición de paso.
Un sistema InSAR realiza la medición sobre la imagen en formato single-look complex
(SLC) el cual contiene la amplitud y la fase de la señal de retorno de la superficie investigada.
Los valores de fase medidos, sin embargo, solo pueden tomar valores entre 0 y 2 π ya que el
número entero de 2 π es inherente a las mediciones de fase (es decir, el número de longitudes
de onda completas). El principio básico de la interferometria SAR se explica en la figura 7 en
la cual se puede ver que la ubicación de cada punto de superficie (y, z) se reduce al rango R y
al ángulo de observación del radar θ en la imagen SAR (Ogundare, 2015).

24
Figura 7: Geometría básica de la interferometría SAR para la determinación de la altura topográfica.
Fuente: (Ogundare, 2015).
La figura 7 representa dos antenas de radar 𝑆1 y 𝑆2 las cuales están viendo simultáneamente
la misma escena con la línea de base interferométrica b, el ángulo medido entre la línea de base
y el horizonte está representado por 𝛼 y la antena 𝑆1 se encuentra a una altura h sobre el datum.
La figura 7 también puede representar una sola antena que visualiza la misma escena en dos
pases separados. En el caso en que las dos antenas estén viendo la misma escena
simultáneamente, una antena (considerada como maestra) transmitirá y recibirá señal de radar,
mientras que la segunda solo recibirá señal sin capacidad para transmitir la señal. La elevación
(z) del punto P sobre el datum se puede expresar como (Ogundare, 2015):
𝑧 = ℎ − 𝑅 cos 𝜃 (12)
Por ley del coseno
(𝑅 + 𝑑𝑅)2 = 𝑅2 + 𝑏2 − 2𝑅𝑏 cos(90 − 𝜃 + 𝛼) (13)

25
Se deduce que,
𝑅 = 𝑏2−𝑑𝑅2
2(𝑏 sin(𝜃−𝛼)+𝑑𝑅) (14)
Según Madsen y Zebker (1994) y Keydel (2005), la fase interferométrica (𝜙) de los píxeles
correspondientes en dos imágenes SAR con sus fases medidas ∅1 y ∅2 y los rangos
correspondientes 𝑅1 y 𝑅2, se puede expresar como (citado por (Ogundare, 2015)).
∅ = ∅2 − ∅1 = 2𝜋
𝜆𝑚 (𝑅2 − 𝑅1) (15)
Donde m = 1 cuando las antenas comparten el mismo transmisor, y m = 2 si cada antena
actúa como transmisor y receptor. Con respecto a la figura 7, si las antenas 𝑆1 y 𝑆2 comparten
el mismo transmisor, la diferencia de rango dR = 𝑅1 - 𝑅2 a partir de la ecuación 15 se puede
expresar como:
𝑑𝑅 = 𝜆𝜙
2𝜋 (16)
Sustituyen la ecuación 14 y 16 en la ecuación 12 se tiene que,
𝑧 = 𝑏2− (
𝜆𝜙
2𝜋)
2
2 (𝑏 sin(𝜃−𝛼)𝜆𝜙
2𝜋 )
cos 𝜃 (17)
Para la ecuación 13 si se asume que b≪R (para líneas de base muy pequeñas), el rango de
diferencia se puede expresar como:
𝑑𝑅 ≈ −𝑏 sin(𝜃 − 𝛼) (18)
De la ecuación 16 y 18, la fase interferometrica se puede expresar como:

26
∅ = −2𝜋𝑏 sin(𝜃−𝛼)
𝜆 (19)
De la figura 7, suponga que 𝜃0 representa el ángulo de mira del radar con respecto a un
punto 𝑃0 en un datum (superficie plana de la Tierra), lo cual puede expresarse como:
sin(𝜃 − 𝛼) = sin(𝜃0 + 𝛿𝜃 − 𝛼) (20)
sin(𝜃 − 𝛼) ≈ sin(𝜃0 − 𝛼) + cos(𝜃0 − 𝛼) 𝛿𝜃 (21)
La fase interferometrica de la ecuación 19 puede ser reescrita como:
∅ = −2𝜋𝑏 sin(𝜃0−𝛼)
𝜆−
−2𝜋𝑏 cos(𝜃0−𝛼)
𝜆 𝛿𝜃 (22)
Donde el primer término en la ecuación 22 representa la diferencia de fase de la Tierra plana
(o sin topografía). Si la diferencia de fase de la Tierra plana se elimina de la fase
interferométrica medida, lo que queda se conoce como interferograma aplanado, y se expresa
como:
𝜙𝐴𝑝𝑙𝑎𝑛𝑎𝑑𝑜 = −2𝜋𝑏 cos(𝜃0−𝛼)
𝜆 𝛿𝜃 (23)
El interferograma aplanado hace referencia a la variación de la altura de la escena con
respecto a la Tierra plana. En el mapeo de terreno InSAR, esto se usa para transformar la fase
interferométrica para cambiar en altura relativa de un píxel al siguiente. Un mapa de altura se
forma eligiendo un punto de referencia en la imagen, asignando un valor de altura al punto y
luego usando el cambio en alturas relativas derivado de la ecuación 23 para determinar las
alturas de otros puntos en función del valor del punto de referencia. La ecuación 17 es un caso
en el que la interferometría SAR se usa para determinar las elevaciones de los puntos del terreno
como en un DEM. Para el enfoque de repetición, donde el sistema SAR tiene una antena única

27
(que actúa como transmisor y receptor) vuelve a la misma posición e imágenes de la misma
escena después de un tiempo (suponiendo que no haya cambios significativos en la escena entre
las dos imágenes), dR en las ecuaciones 14, 16 y 18 serán reemplazadas por 𝑑𝑅 = 𝜆∅
4𝜋.
Teniendo en cuenta un enfoque de repetición en el que la deformación del terreno (como es
el caso de un terremoto o la hinchazón de un volcán) ha desplazado a muchos de los elementos
de resolución en el segundo paso, como se muestra en la figura 8; si un objeto se toma imágenes
de la misma ubicación en dos momentos diferentes (la misma órbita en dos pasadas) y las fases
de las señales retrodispersadas difieren, se puede inferir que el objeto se ha movido
aproximadamente Δh, lo cual se expresa como (Ogundare, 2015):
Δℎ = 𝑑𝑅
cos 𝜃 (24)
Figura 8: Geometría básica de la interferometría SAR para la determinación del desplazamiento.
Fuente: (Ogundare, 2015).
Donde 𝑅1 y 𝑅2 son los intervalos en dos ubicaciones 𝑆1 y 𝑆2, respectivamente; dR es el
cambio de rango; Δh es el movimiento en la dirección del satélite (cambio en la altura del
suelo); y θ es el ángulo de observación (Ogundare, 2015).

28
De la ecuación 15 y tomando m=1 la fase iterferometrica se expresa como:
∅ = 4𝜋(𝑑𝑅)
𝜆 (25)
Donde ∅ = ∅2 − ∅1 y 𝑑𝑅 = 𝑅2 − 𝑅1 . Sustituyendo dR de la ecuación 24 dentro de la
ecuación 25 y reordenando, el pequeño cambio de altura Δh, que ocurre entre los tiempos de
adquisición de las imágenes (P moviéndose a P’ ), puede expresarse de la siguiente forma:
Δℎ = 𝜆𝜙
4π cos 𝜃 (26)
En la figura 8, la diferencia de rango 𝑑𝑅 = 𝑅2 − 𝑅1 produce la elevación del suelo Δh. El
radar, sin embargo, mide solo cambios (dR) en la dirección LOS; para estimar la deformación
en cualquier otra dirección (verticalmente o en tres dimensiones), deben usarse las órbitas
ascendentes, descendentes y adyacentes de los satélites, junto con ciertas suposiciones según
el caso. En la práctica, para determinar el desplazamiento debido únicamente al levantamiento
en la dirección vertical, la contribución de fase plana primero debe restarse de la diferencia de
fase interferométrica mediante un proceso conocido como aplanamiento de la tierra; el efecto
de la topografía se resta (Ogundare, 2015).
Dado lo anterior la técnica InSAR combina dos imágenes de SAR para producir un
interferograma de radar, que puede revelar información sobre la tercera dimensión (elevación)
del área objetivo o medir cambios de minutos en la distancia de rango entre dos adquisiciones
de imágenes. La imagen del radar es un registro bidimensional de las amplitudes y las fases de
los retornos de los objetivos dentro del área de imágenes. La amplitud es una medida de la
reflectividad del objetivo, mientras que la fase codifica los cambios en la superficie, así como
un término proporcional al rango del objetivo (Massonnet & Feigl, 1998). Por lo tanto, si dos
imágenes SAR de un área objetivo están disponibles y se pueden alinear con precisión a una
fracción de un ancho de píxel, se puede determinar la fase relativa de cada punto de imagen.
29
Los datos de fase relativa de dos imágenes tomadas desde ángulos de visión ligeramente
diferentes proporcionan información sobre los cambios en el alcance de los objetivos en el
suelo, y así la topografía de la superficie en la resolución de la imagen SAR puede recuperarse
con el conocimiento de la geometría de la imagen. La diferencia de fase de dos imágenes
tomadas desde el mismo punto de vista, pero en diferentes momentos, puede medir con
precisión cualquier cambio de la fase devuelta. Por lo tanto, si la superficie de la Tierra se
moviera hacia o fuera del radar entre las dos pasadas de generación de imágenes, se producirían
cambios de fase que se pueden medir con una precisión correspondiente a los desplazamientos
a nivel milimétrico (Massonnet & Feigl, 1998).
7.5 Interferometria Diferencial SAR (DInSAR)
La técnica DInSAR se utiliza para detectar y medir movimientos muy pequeños de la
superficie. Para poder detectar deformaciones tan pequeñas que hay que deshacerse de la
componente de topografía y dada la pequeña longitud de onda en la que se opera, se detectan
movimientos subcentimétricos (Sillerico et al., 2010). Esta técnica permite realizar un estudio
de los desplazamientos del terreno a partir de los interferogramas en los cuales se recogen las
diferencias de fases entre las dos imágenes que los forman y estas diferencias pueden deberse
a las formas del terreno y su desplazamiento (Klees & Massonnet, 1998).
La técnica DInSAR ha sido ampliamente conocida como un enfoque eficaz para el
monitoreo de la deformación de la tierra. El SAR interferométrico es una de las técnicas
DInSAR más populares, y estima el movimiento de línea de vista de dispersores permanentes
extraídos de docenas de imágenes SAR. Las docenas de imágenes de SAR ayudan a eliminar
errores inesperados contaminados en las diferencias de fase (Susaki, Tsujino, & Anahara, 2017)
7.5.1 Fase interferometrica
En DInSAR se emplean un par de imágenes SAR tomadas desde diferentes puntos de vista,
se combinan de manera que la diferencia en sus distancias a un mismo punto se relaciona con

30
la topografía de la escena. Si S1 y S2 son las matrices complejas correspondientes a las
imágenes SAR maestra (una forma de llamar a la imagen de referencia) y la esclava, el
interferograma es la matriz compleja resultante de multiplicar la primera matriz por la complejo
conjugada de la segunda. Diferentes adquisiciones del mismo área se realizan en diferentes
instantes temporales, muestreando el movimiento de deformación que tiene lugar en la escena.
Así pues, al combinar las diferentes imágenes para construir el conjunto de interferogramas,
cada uno contendrá información sobre el incremento de deformación ya sea negativa o positiva
sucedido entre las adquisiciones masestra y esclava (Sánchez et al., 2010).
La elaboración de los interferogramas puede llevarse a cabo mediante varios tipos de
tratamiento, que siempre requieren la existencia de un modelo digital de elevación de terreno
(independiente o no de las imágenes SAR), ya que éste se puede generar al tener dos imágenes
de la misma superficie. El DEM debe permitir realizar las correcciones topográficas necesarias
y de cuya calidad, depende la resolución del interferograma, que puede ser de 100 m o inferior.
Además de la resolución, que depende fundamentalmente del tamaño del píxel (varias decenas
de metros), la otra medida de la validez del interferograma es su precisión, que depende de la
longitud de onda de la radiación electromagnética emitida por el RADAR (Jiménez, 2013).
En el proceso DInSAR se simula un interferograma sintético utilizando el DEM y los
parámetros orbitales de ambas imágenes utilizados para calcular el interferograma. El
interferograma sintético se sustrae al interferograma real y se obtiene la diferencia de fase
relacionada con el movimiento del terreno. Este nuevo interferograma se denomina
Interferograma Diferencial (Gabriel et al., 1989 citado por Russo, 2012).
7.5.2 Fuentes de ruido en la fase interferometrica.
En el caso de la detección de deformación del terreno donde el punto P se movió al punto
P1 durante el tiempo transcurrido entre dos adquisiciones de imágenes, la fase interferométrica
se ve afectada por varios parámetros. La figura 9 muestra una simplificación del proceso de

31
adquisición de imágenes, considerando solo un punto de tierra P (Crosetto et al., 2005 citado
por Russo, 2012).
Figura 9: Diagrama de adquisición de imágenes en un caso de subsidencia entre dos pases de satélite.
Fuente: (Crosetto et al., 2005 citado por Russo, 2012).
La principal limitación en la fase interferometrica es el error en el DEM topográfico. En este
sentido, las líneas de base pequeñas son utilizadas en el cálculo del interferograma, por lo cual
la sensibilidad del interferograma diferencial es más baja al de inexactitud del DEM (Crosetto
et al., 2005 citado por Russo, 2012).
De esta forma se tiene que:
∆Φ𝐼𝑛𝑡 = Φ𝑆 − Φ𝑀 =𝑆𝑃−𝑀𝑃
𝜆
4∗𝜋
+𝑆𝑃1−𝑆𝑃
𝜆
4∗𝜋
+ Φ𝐴𝑡𝑚 + Φ𝑁𝑜𝑖𝑠𝑒 = Φ𝑇𝑜𝑝𝑜 +
Φ𝑀𝑜𝑣 + Φ𝐴𝑡𝑚 + Φ𝑁𝑜𝑖𝑠𝑒 (27)
Donde:
• Φ𝑆 y Φ𝑀 son la fase interforemetrica de la imagen esclava y maestra
respectivamente,
• Φ𝐴𝑡𝑚 es la contribución atmosférica,
32
• Φ𝑁𝑜𝑖𝑠𝑒 es el componente de ruido,
• Φ𝑇𝑜𝑝𝑜 es el componente topográfico,
• SP es la distancia del satélite de la imagen esclava al punto P,
• MP es la distancia del satélite de la imagen maestra al punto P,
• 𝜆 es la longitud de onda del radar
Si la superficie topográfica se conoce por medio de un DEM, la contribución de Φ𝑇𝑜𝑝𝑜
puede ser extraída (Φ𝑇𝑜𝑝𝑜_𝑆𝑖𝑚) de ∆Φ𝐼𝑛𝑡 , obteniendo la diferencia de fase ∆Φ𝐷−𝐼𝑛𝑡 ,
∆Φ𝐷−𝐼𝑛𝑡 = Φ𝐼𝑛𝑡 − Φ𝑇𝑜𝑝𝑜𝑆𝑖𝑚 = Φ𝑀𝑜𝑣 + Φ𝐴𝑡𝑚 + Φ𝑅𝑒𝑠_𝑇𝑜𝑝𝑜 + Φ𝑁𝑜𝑖𝑠𝑒 (28)
Donde Φ𝑅𝑒𝑠_𝑇𝑜𝑝𝑜 representa el error residual del DEM.
Los otros ruidos de fase están relacionados con la presencia de los diferentes dispersores
por píxel y sus cambios en el tiempo como se establece a continuación (Fletcher et al., 2007):
• Contribución de la atmosfera a la fase interferometrica: Cuando dos imágenes
SAR interferométricas no son simultáneas, la trayectoria de viaje de la radiación para
cada uno puede verse afectada de manera diferente, dado que los índices de
refracción de la atmósfera y la ionosfera no son homogéneos en el espacio ni en el
tiempo. En particular, la diferente humedad atmosférica, la temperatura y la presión
entre las dos tomas tendrán una consecuencia visible en la fase interferométrica. Para
un SAR espacial, los retrasos de ruta pueden ser muy grandes, dependiendo de la
frecuencia del radar (por ejemplo, un retardo de trayecto ionosférico superior a 50
m en la banda L) (Fletcher et al., 2007; Simons & Rosen, 2007). Este efecto suele
limitarse a un cambio de fase interferométrico pico a pico de 2π a lo largo de la
imagen con una variabilidad espacial uniforme (desde unos pocos cientos de metros
hasta unos pocos kilómetros). El efecto de dicha contribución afecta tanto a la altitud
(especialmente en el caso de líneas de base pequeñas) como a las mediciones de
deformación del terreno.
33
• Cambios temporales de la dispersión: En el caso de una cuenca hidrográfica o áreas
con vegetación, los dispersores cambian totalmente después de unos pocos
milisegundos, mientras que las rocas expuestas o las áreas urbanas permanecen
estables incluso después de años. Sin embargo, también existen situaciones
intermedias en las que la fase interferométrica sigue siendo útil incluso si está
alterada por este tipo de ruido.
• Ángulos de visión diferentes: Es un efecto de moteado o también conocido como
pimienta y sal en el cual existe una línea base crítica sobre la cual la fase
interferométrica es solo ruido. La línea de base crítica depende de la dimensión de
la celda de resolución del rango de terreno (y por lo tanto también de la pendiente
del terreno), de la frecuencia del radar y de la distancia entre el sensor y el objetivo.
Sin embargo, este término de ruido de fase puede eliminarse del interferograma por
medio de un paso de procesamiento previo de las dos imágenes SAR conocidas como
desplazamiento espectral o filtrado de banda común.
7.6 Sentinel 1
El satélite Sentinel-1 formó parte de la primera misión espacial Copérnico, lanzada por
Agencia Espacial Europea (ESA) en el 2014. Es un satélite Radar de Apertura Sintética (SAR)
que permite obtener imágenes independientemente de las condiciones climáticas (Geocento
Earth Imaging, 2015), dado que lleva un instrumento de radar avanzado para proporcionar un
suministro de imágenes de la superficie de la Tierra durante todo el día y la noche.
El radar de apertura sintética (SAR) de banda C se basa en los sistemas de SAR de la ESA
y de Canadá en ERS-1, ERS-2, Envisat y Radarsat. Posee una constelación de dos satélites
orbitando a 180 °, y captura imágenes de la Tierra entera cada seis días. Además de transmitir
datos a varias estaciones terrestres de todo el mundo para una rápida dispersión, Sentinel-1
34
también lleva un láser para transmitir datos al sistema geoestacionario europeo de
retransmisión de datos para la entrega continua de datos (ESA, 2016).
Sentinel-1 es el resultado de una estrecha colaboración entre la ESA, la Comisión Europea,
la industria, los proveedores de servicios y los usuarios de datos. Diseñado y construido por un
consorcio de alrededor de 60 empresas lideradas por Thales Alenia Space y Airbus Defence
and Space, con Astrium Alemania como responsable de la carga útil de CSAR, el cual es un
excelente ejemplo de excelencia tecnológica de Europa. Sentinel-1A fue lanzado el 3 de abril
de 2014 y Sentinel-1B el 25 de abril de 2016. Ambos fueron puestos en órbita en un cohete
Soyuz desde el puerto espacial de Europa en la Guayana Francesa (ESA, 2016).
La misión Sentinel-1 nace de la iniciativa conjunta de Copernicus de la Comisión Europea
(CE) y la Agencia Espacial Europea (ESA). Copernicus, anteriormente conocido como GMES,
es una iniciativa europea para la implementación de servicios de información relacionados con
el medio ambiente y la seguridad. Se basa en datos de observación recibidos de satélites de
observación de la Tierra e información terrestre (ESA, 2018e).
Esta misión incluye imágenes en banda C que funcionan en cuatro modos exclusivos de
toma con diferente resolución (hasta 5 m) y cobertura (hasta 400 km). Proporciona capacidad
de polarización dual, tiempos de revisita muy cortos y entrega rápida del producto. Para cada
observación que realice, está disponible la información de las mediciones precisas, de la
posición y la altitud de la nave espacial. Además, en la misión Sentinel-1 está presente
un instrumento C-SAR , el cual puede ofrecer un monitoreo del área, amplia confiable y
repetida, además este instrumento admite el funcionamiento en doble polarización (HH + HV,
VV + VH) implementado a través de una cadena de transmisión (conmutable a H o V) y dos
cadenas de recepción paralelas para polarización H y V (ESA, 2018d).
El instrumento de radar con el que cuenta esta mision opera a una frecuencia central de
5,405 GHz. Incluye una antena activa de phased array de aspecto derecho que proporciona una

35
exploración rápida en elevación y azimut, capacidad de almacenamiento de datos de 1 410 Gb
y capacidad de enlace descendente de banda X de 520 Mbit / s (ESA, 2018d).
Sentinel-1 está diseñado para funcionar en un modo de operación preprogramado y libre de
conflictos, generando imágenes de todas las masas terrestres globales, zonas costeras y rutas
de navegación en alta resolución. Esto garantiza la confiabilidad del servicio requerido por los
servicios operativos (ESA, 2018d).
Se espera que cada satélite Sentinel-1 transmita datos de observación de la Tierra durante al
menos 7 años y tenga combustible a bordo durante 12 años (ESA, 2018d).
Sentinel-1 opera en cuatro modos de adquisición exclusivos:
• Stripmap (SM)
• Franja ancha interferométrica (IW)
• Franja extra ancha (EW)
• Modo de onda (WV).
Figura 10: Modos Sentinel-1.
Fuente: (ESA, 2018d).
En el presente trabajo se utilizarán imágenes adquiridas de forma Interferometric Wide
Swath Mode (IW), el cual permite combinar un ancho de franja grande (250 km) con una
resolución geométrica moderada (5 m por 20 m). El modo IW representa tres submachos

36
utilizando Terrain Observation con escaneos progresivos SAR (TOPSAR). Con la técnica
TOPSAR, además de dirigir el haz en el rango como en SCANSAR, el haz también se dirige
electrónicamente de atrás hacia adelante en la dirección azimutal para cada ráfaga, evitando el
festoneado y dando como resultado una imagen de mayor calidad. La interferometría está
garantizada por una superposición suficiente del espectro Doppler (en el dominio azimutal) y
el espectro del número de ondas (en el dominio de elevación). La técnica TOPSAR garantiza
una calidad de imagen homogénea en toda la franja. El modo IW es el modo de adquisición
predeterminado sobre tierra (ESA, 2018d).
El Core Ground Segment monitorea y controla la nave espacial Sentinel, asegura la
adquisición, procesamiento, archivo y disperción de los datos de medición a los usuarios
finales. Además, es responsable de realizar una planificación de misión libre de conflictos de
acuerdo con un escenario operacional predefinido, y asegura la calidad de los productos de
datos y el rendimiento de los sensores espaciales a través de actividades continuas de
monitoreo, calibración y validación, garantizando el rendimiento general de la misión (ESA,
2018a). El segmento terrestre de Copérnico se complementa con el segmento terrestre
cooperativo Sentinel, que se introdujo con el objetivo de explotar aún más las misiones
Sentinel. Esto conlleva elementos adicionales para soluciones especializadas en diferentes
áreas tecnológicas, tales como adquisición de datos, producción y disperción complementaria,
herramientas y aplicaciones innovadoras.Los segmentos terrestres de misiones que aportan
Copernicus, con sus propias funciones específicas de control, recepción de datos,
procesamiento de datos, disperción de datos e instalaciones de archivo de datos, brindan datos
esenciales que complementan las misiones Sentinel (ESA, 2018a).
Con el fin de promover la utilización de los datos obtenidos a través del satélite Sentinel, la
ESA y la Comisión Europea proporcionan estos de forma gratuita y abierta al público, teniendo
en cuenta los siguientes principios (ESA, 2018a).

37
1. Cualquiera puede acceder a los datos de Sentinel adquiridos. En particular, no se
hace distinción entre los usos públicos, comerciales y científicos, o entre usuarios
europeos o no europeos.
2. Las licencias para el uso de los datos de Sentinel están disponibles de forma gratuita.
3. Los datos de Sentinel se pondrán a disposición de los usuarios a través de un acceso
en línea "genérico", de forma gratuita, sujeto a un proceso de registro de usuarios y
la aceptación de los términos y condiciones genéricos.
Los modos de acceso adicionales y la entrega de productos adicionales se adaptarán a las
necesidades específicas del usuario y estarán sujetos a condiciones personalizadas. En caso de
que se apliquen restricciones de seguridad, que afecten la disponibilidad o la puntualidad de
los datos de Sentinel, se activarán procedimientos operativos específicos.
Todos los datos SAR de Sentinel-1 adquiridos se procesan sistemáticamente para crear tipos
de productos predefinidos y están disponibles a nivel mundial, regional y local, dentro de una
escala de tiempo definida. Los productos regionales se generan sistemáticamente para un
subconjunto de los datos totales adquiridos, en regiones o áreas bien definidas. Los productos
SLC de nivel 1 están disponibles dentro de 1 hora de observación (ESA, 2018b).
Figura 11: Disponibilidad de producto operativo para cada nivel.
Fuente: (ESA, 2018b).

38
Cada modo puede producir productos a nivel SAR-0, nivel-1 SLC, nivel-1 GRD y nivel-2
OCN (ESA, 2018b).
Los productos de datos están disponibles en polarización única (VV o HH) para el modo
Onda y doble polarización (VV + VH o HH + HV) y polarización única (HH o VV) para los
modos SM, IW y EW (ESA, 2018c).
Figura 12: Representación gráfica de los productos principales de Sentinel-1.
Fuente: (ESA, 2018c)
• Nivel-0: Los productos de nivel SAR consisten en la secuencia de cuantificación de
datos RAE desenfocados comprimidos de cuantificación adaptativa de bloques
dinámicos flexibles (FDBAQ). Para que los datos sean utilizables, será necesario
descomprimirlos y procesarlos mediante el software de enfoque (ESA, 2018c).
• Nivel 1: Los datos de nivel 1 son los productos generalmente disponibles destinados
a la mayoría de los usuarios de datos. Los productos de nivel 1 se producen como
Single Look Complex (SLC) y Ground Range Detected (GRD).
Los productos Level-1 Single Look Complex (SLC) consisten en datos SAR
enfocados georreferenciados utilizando datos de órbita y altitud del satélite y
39
proporcionados en geometría de rango inclinado. Los productos incluyen una única
vista en cada dimensión utilizando el ancho de banda completo de la señal TX y
consisten en muestras complejas que preservan la información de la fase (ESA,
2018c).
Los productos de Detección de rango de nivel 1 (GRD) del nivel 1 consisten en datos
de SAR enfocados que se han detectado, mirado varias veces y proyectado al rango
de tierra usando un modelo de elipsoide de la Tierra. La información de fase se
pierde. El producto resultante tiene píxeles de resolución aproximadamente cuadrada
y un espaciado de píxeles cuadrados con moteado reducido a costa de una resolución
geométrica reducida (ESA, 2018c).
Los productos GRD pueden estar en una de tres resoluciones: Resolución completa
(FR), Alta resolución (HR),
Resolución media (MR). La resolución depende de la cantidad de visualizaciones
múltiples realizadas. Los productos GRD de nivel 1 están disponibles en MR y HR
para modos IW y EW, MR para modo WV y MR, HR y FR para modo SM (ESA,
2018c).
Nivel 2: Los productos OCN de nivel 2 incluyen componentes para los espectros Ocean
Swell (OSW) que proporcionan continuidad con ERS y ASAR WV y dos nuevos componentes:
Ocean Wind Fields (OWI) y Surface Radial Velocities (RVL). El OSW es un espectro de oleaje
de superficie oceánica bidimensional e incluye una estimación de la velocidad y dirección del
viento por espectro de oleaje. El OSW se genera solo desde los modos Stripmap y Wave. Para
el modo Stripmap, hay múltiples espectros derivados de imágenes SLC Nivel 1 generadas
internamente. Para el modo Onda, hay un espectro por viñeta.
• El OWI es una estimación cuadriculada de la velocidad y dirección del viento en
superficie a 10 m por encima de la superficie derivada de las imágenes GRD Nivel
40
1 generadas internamente de los modos SM, IW o EW. La RVL es una diferencia de
cuadrícula de rango de tierra entre la grilla Doppler de Nivel 2 medida y el Doppler
geométrico calculado de Nivel-1 (ESA, 2018c).
7.7 Plataforma de aplicación Sentinel (SNAP)
La plataforma de aplicaciones de Sentinel (SNAP), posee una arquitectura común para todas
las cajas de herramientas de Sentinel. La arquitectura SNAP es ideal para el procesamiento y
análisis de la observación de la Tierra debido a las siguientes innovaciones tecnológicas:
Extensibilidad, Portabilidad, Plataforma Modular, Abstracción de Datos Generales de EO,
Gestión de Memorias y un Marco de Procesamiento de Gráficos.
Brockmann Consult, Array Systems Computing y CS, denominada plataforma de
aplicaciones Sentinel (SNAP), están desarrollando conjuntamente una arquitectura común para
todas las cajas de herramientas de Sentinel. Las características más relevantes del software son
(ESA, 2018f):
• Arquitectura común para todas las cajas de herramientas - Visualización y
navegación de imágenes muy rápidas, incluso de imágenes giga-pixel.
• Marco de procesamiento de gráficos (GPF) para crear cadenas de procesamiento
definidas por el usuario.
• La gestión avanzada de capas permite agregar y manipular nuevas superposiciones,
como imágenes de otras bandas, imágenes de servidores WMS o archivos de forma
ESRI.
• Ricas definiciones de región de interés para estadísticas - Definición fácil de máscara
de bits y superposición.
• Aritmética de banda flexible usando expresiones matemáticas arbitrarias.
• Precisa reproyección y orto-rectificación de mapa común proyecciones.
• Geocodificación y rectificación usando puntos de control de tierra.

41
• Descarga automática del DEM SRTM.
• Biblioteca de productos para escanear y catalogar grandes archivos de manera
eficiente.
• Soporte multiproceso y procesador multiproceso -Visualización integrada de
WorldWind.
SNAP está utilizando las siguientes tecnologías (ESA, 2018f):
• Plataforma NetBeans: marco de aplicaciones de escritorio.
• Install4J: constructor de instalación multiplataforma.
• GeoTools: biblioteca de herramientas geoespaciales.
• GDAL: lectura/escritura de formatos de datos geoespaciales de trama y vector.
• Jira: rastreador de problemas
• Git: sistema de control de versiones, alojado por GitHub.
8 Metodología
La metodología empleada para la estimación de la subsidencia de la ciudad de Bogotá es la
que se muestra en la figura 13 y se describe a continuación:
Figura 13: Metodología.
Fuente: Elaboración propia.
Adquisición de datos (imagenes SLC, Sentinel-1
IW)
Corregistro de imágenes
Generación del interferograma
Remoción de la topografía
Filtro Goldstein
Desenvolvimiento de la fase
Estimación de las velocidades de
deformación del terreno
Análisis de resultados

42
8.1 Adquisición de datos
Se realiza la adquisición de imágenes de radar Sentinel en formato Single Look Complex
(SLC), el cual consta de datos SAR los cuales se encuentran georreferenciados de acuerdo a la
información obtenida de la órbita y altitud del satélite. Los datos son proporcionados en
geometría slant – range la cual es la coordenada de observación del rango natural del radar,
definida como la línea de vista desde el radar hasta cada objeto reflector (ESA, 2018b).
Para el presente proyecto se utilizaron imágenes del Radar Sentinel-1 de la ciudad de
Bogotá-Colombia, las cuales fueron seleccionadas para mostrar los mejores resultados en
términos de coherencia y fase interferométrica; además se contó con imágenes con resolución
temporal entre los 12 y 36 días. Las características específicas de las imágenes con las que se
desarrolló el proyecto se muestran a continuación en la tabla 1.
Tabla 1: Características de las Imágenes del Satélite Sentinel 1 empleadas en el proyecto.
Tipo SAR
Sistema Sentinel-1A, 1B
Fechas de Captura 04 Dic 2015- 23 Dic 2017
Banda C
Modo IW SLC
Polarización VV
Nivel de Procesamiento SAR Standard L1
Resolución
Radiométrica 16 bits
Resolución Geométrica 5x20 mts
Fuente ESA
Tamaño de la Imagen 69186X13554 pixeles
Dirección Descendente
Fuente: (ESA, 2018e).
Para el desarrollo del presente trabajo se adquirieron un total de 47 imágenes las cuales se
muestran en la tabla 2:

43
Tabla 2: Fecha de las imágenes empleadas en el presente proyecto.
Fecha
23/12/2017 1/08/2017 26/02/2017 7/07/2016
11/12/2017 20/07/2017 14/02/2017 13/06/2016
29/11/2017 8/07/2017 21/01/2017 20/05/2016
17/11/2017 26/06/2017 28/12/2016 26/04/2016
5/11/2017 14/06/2017 4/12/2016 2/04/2016
24/10/2017 2/06/2017 10/11/2016 9/03/2016
12/10/2017 21/05/2017 17/10/2016 14/02/2016
30/09/2017 9/05/2017 11/10/2016 21/01/2016
18/09/2017 27/04/2017 4/11/2016 28/12/2015
6/09/2017 15/04/2017 17/09/2016 4/12/2015
25/08/2017 3/04/2017 24/08/2016 10/11/2015
13/08/2017 10/03/2017 31/07/2016
Fuente: Elaboración Propia.
8.2 Corregistro de imágenes
La interferometría SAR requiere una coincidencia de píxel a píxel entre las características
comunes en los pares de imágenes SAR. Por lo tanto, el registro simultáneo y las alineaciones
de imágenes SAR, es un paso esencial para la determinación precisa de la diferencia de fase y
para la reducción del ruido (Li & Bethel, 2008).
Para el procesamiento interferométrico, dos o más imágenes deben ser corregistradas para
lo cual una imagen se selecciona como la maestra y las otras imágenes son las esclavas. Los
píxeles en las imágenes esclavas se moverán para alinearse con la imagen maestra a una
precisión del subpíxel. El corregistro asegura que cada objetivo contribuya al mismo píxel
(rango, azimut) tanto en la imagen maestra como en la esclava (Veci, 2016).
Para este estudio como se muestra en la figura 14 el procedimiento de corregistro se basa en
la técnica de correlación cruzada y dado que esta técnica para una alineación óptima tiende a
ser lenta para ventanas de búsqueda muy grandes, el procedimiento se divide en dos partes:
corregistro grueso y fino. En el corregistro grueso, los desplazamientos se aproximan mediante
el uso de las órbitas de los satélites, y/o mediante la definición de puntos comunes aproximados

44
en las imágenes maestra y esclava(s), realizando la correlación que coincide con las ventanas
grandes. Para el corregistro fino aplica la técnica de correlación de automatización para obtener
una precisión de alineación de subpíxel (European Space Agency, 2018).
Figura 14: Proceso del Corregistro.
Fuente: Elaboración propia a partir de información obtenida de (European Space Agency, 2018).
Los desplazamientos entre la imagen maestra y esclava(s) se calculan maximizando la
correlación cruzada primero en el nivel grueso, con ventanas grandes y factores de
sobremuestreo inferiores, seguido del nivel fino, con ventanas más pequeñas y factores de
sobremuestreo más altos (European Space Agency, 2018).
Para lo anterior el corregistro estimado mediante la optimización de la correlación se puede
mejorar (refinar) utilizando una información de altura (a través del DEM). Para el píxel de la
imagen maestra se calcula la coordenada correspondiente (valor real) en la imagen esclava.
Para realizar este paso se empleara el DEM obtenido por la misión SRTM. El uso de
refinamiento evita los errores de corregistro debido a la mala distribución de ventanas o la falta
de ventanas de correlación útiles en el método convencional. Además, el coregistro mejora en
caso de líneas de base grandes y una fuerte topografía (European Space Agency, 2018).
45
Por último se realiza la estimación del polinomio de corregistro (CPM) el cual se estima a
través de los residuos entre el Coregistrado Fino y los desplazamientos geométricos calculados
usando un DEM y luego se genera el remuestreo interferométrico de las imágenes esclavas a
la geometría maestra (European Space Agency, 2018).
8.3 Generación del interferograma
El interferograma se forma mediante la multiplicación cruzada de la imagen maestra con el
conjugado complejo de la imagen esclava. La amplitud de ambas imágenes se multiplica
mientras que la fase representa la diferencia de fase entre las dos imágenes (Veci, 2016).
La fase interferométrica de cada píxel de las imagenes SAR dependerá únicamente de la
diferencia en las rutas de viaje de cada uno a la celda de resolución considerada, adicionalmente
a través del procesamiento interferométrico, se pretende eliminar otras fuentes de error para
dejar solo el contribuyente de interés, que generalmente es la elevación o el desplazamiento
(Veci, 2016).
En la formación del interferograma se elimina la fase de la tierra plana. Si se conocen las
órbitas para el par interferométrico, la fase de tierra plana se estima utilizando la información
orbital y de los metadatos lo cual se resta del interferograma complejo. La fase de tierra plana
es la fase presente en la señal interferométrica debido a la curvatura de la superficie de
referencia. El sistema de referencia geométrico está definido por el WGS84, que es el utilizado
por todos los sistemas SAR espaciales (European Space Agency, 2018).
En este paso también se genera la estimación de coherencia la cual muestra cuán similar es
cada píxel entre las imágenes esclava y maestra en una escala de 0 a 1. Las áreas de alta
coherencia aparecerán brillantes mientras que las áreas con poca coherencia serán oscuras. En
la figura 15, la vegetación se muestra con poca coherencia y las edificaciones tienen una
coherencia alta.
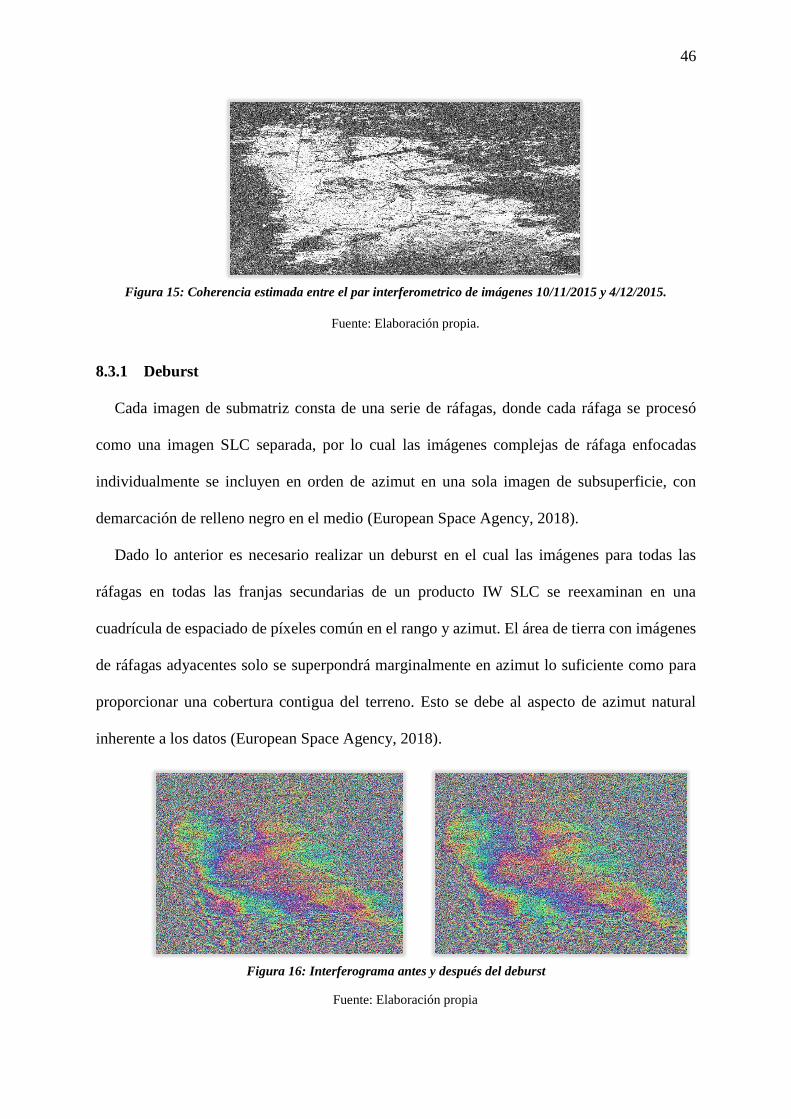
46
Figura 15: Coherencia estimada entre el par interferometrico de imágenes 10/11/2015 y 4/12/2015.
Fuente: Elaboración propia.
8.3.1 Deburst
Cada imagen de submatriz consta de una serie de ráfagas, donde cada ráfaga se procesó
como una imagen SLC separada, por lo cual las imágenes complejas de ráfaga enfocadas
individualmente se incluyen en orden de azimut en una sola imagen de subsuperficie, con
demarcación de relleno negro en el medio (European Space Agency, 2018).
Dado lo anterior es necesario realizar un deburst en el cual las imágenes para todas las
ráfagas en todas las franjas secundarias de un producto IW SLC se reexaminan en una
cuadrícula de espaciado de píxeles común en el rango y azimut. El área de tierra con imágenes
de ráfagas adyacentes solo se superpondrá marginalmente en azimut lo suficiente como para
proporcionar una cobertura contigua del terreno. Esto se debe al aspecto de azimut natural
inherente a los datos (European Space Agency, 2018).
Figura 16: Interferograma antes y después del deburst
Fuente: Elaboración propia

47
8.4 Remoción de la topografía
En esta etapa se remueven los cambios de fase dados por la topografía del terreno, ya que
se presentan valores de fase debido a la curvatura de la superficie de la tierra, los cuales pueden
ser confundidos con los valores de diferencia de fase obtenidos al final del proceso.
En la remoción se estima y resta la fase topográfica del interferograma, por lo cual primero
se codifica el Modelo de Digital Elevacion (DEM) en este caso se empleó el Shuttle Radar
Topography Mission (SRTM) y de forma automática se realiza la selección y descarga de
Internet de la parte que cubre el área de interés así como la interpolación y la contabilidad de
la ondulación del geoide, luego el DEM se codifica por radar a los sistemas de coordenadas de
la imagen maestra (valor real) y junto con la fase de referencia calculada se guardan en un
archivo. Al final la fase de referencia se interpola a la grilla entera de las coordenadas maestras
y esto se resta del interferograma complejo (European Space Agency, 2018).
8.5 Filtro Goldstein
Se agrega un filtro con el fin de homogeneizar los datos de fase. En este paso se empleó un
algoritmo adaptativo no lineal propuesto por Goldstein y Werner en 1998 en el cual se reduce
el ruido de la fase interferométrica y de esta forma se mejora la precisión en el
desenvolvimiento de fase (Goldstein & Werner, 1998).
Este filtro está basado en el concepto de multiplicación del espectro de la fase
interferométrica 𝑍(𝑢, 𝑣) de su valor absoluto | 𝑍(𝑢, 𝑣)| a la potencia de un exponente α (Shi,
2011)
𝑄(𝑢, 𝑣) = |𝑍(𝑢, 𝑣)|∝𝑍(𝑢, 𝑣) (29)
Donde 𝑄(𝑢, 𝑣) es la respuesta del filtro, 𝑍(𝑢, 𝑣) es la transformada de Fourier de la fase
interferométrica y α es un parámetro de filtro entre cero y uno. Cuando α = 0, el factor de

48
multiplicación se convierte en 1 y no tiene efecto de filtrado. Para valores grandes de α, el
filtrado es significativo, y cuando α = 1, el efecto de filtrado es más fuerte (Shi, 2011).
El filtro mejora significativamente la visibilidad de las franjas en el interferograma y reduce
el ruido de fase como se observa en la figura 17.
Figura 17: Interferograma con filtro Goldstein.
Fuente: Elaboración propia
8.6 Desenvolmiento de la fase
En este paso la fase pasa de ser relativa a ser absoluta (Unwrapping). Este proceso se realiza
mediante el algoritmo SNAPHU, donde el enfoque de la interferometría de radar es trabajar
con la señal de fase relativa bidimensional, que es el módulo 2 de la señal de fase absoluta
(que es desconocida).
En ese sentido, el problema directo es que la fase “envuelta” está dada en un intervalo de
( - , ) y por otra parte el problema inverso, que es el desenvolvimiento de la fase, el cual es
un proceso de mayor complejidad debido a su no linealidad y no singularidad, lo que demanda
un análisis más profundo (Chen & Zebker, 2002).
En el interferograma, la fase interferométrica es ambigua y solo se conoce dentro 2π. Para
poder relacionar la fase interferométrica con la alturas, primero se debe desenvolver la fase. La
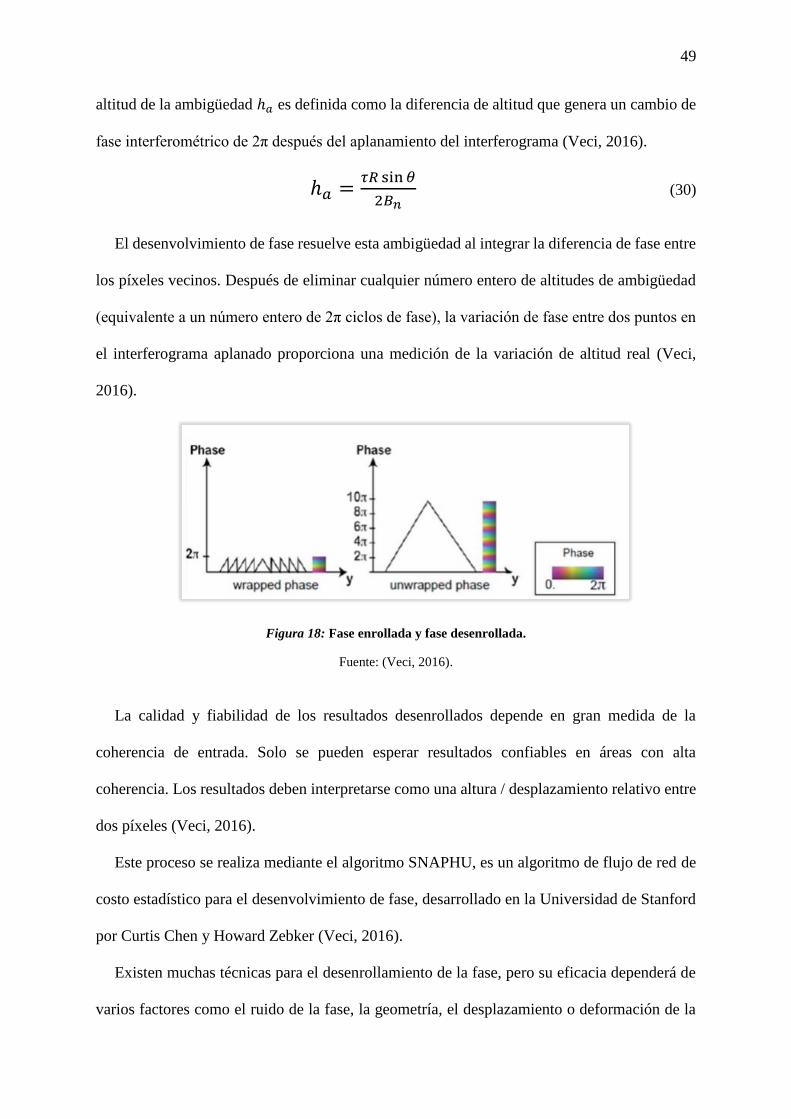
49
altitud de la ambigüedad ℎ𝑎 es definida como la diferencia de altitud que genera un cambio de
fase interferométrico de 2π después del aplanamiento del interferograma (Veci, 2016).
ℎ𝑎 =𝜏𝑅 sin 𝜃
2𝐵𝑛 (30)
El desenvolvimiento de fase resuelve esta ambigüedad al integrar la diferencia de fase entre
los píxeles vecinos. Después de eliminar cualquier número entero de altitudes de ambigüedad
(equivalente a un número entero de 2π ciclos de fase), la variación de fase entre dos puntos en
el interferograma aplanado proporciona una medición de la variación de altitud real (Veci,
2016).
Figura 18: Fase enrollada y fase desenrollada.
Fuente: (Veci, 2016).
La calidad y fiabilidad de los resultados desenrollados depende en gran medida de la
coherencia de entrada. Solo se pueden esperar resultados confiables en áreas con alta
coherencia. Los resultados deben interpretarse como una altura / desplazamiento relativo entre
dos píxeles (Veci, 2016).
Este proceso se realiza mediante el algoritmo SNAPHU, es un algoritmo de flujo de red de
costo estadístico para el desenvolvimiento de fase, desarrollado en la Universidad de Stanford
por Curtis Chen y Howard Zebker (Veci, 2016).
Existen muchas técnicas para el desenrollamiento de la fase, pero su eficacia dependerá de
varios factores como el ruido de la fase, la geometría, el desplazamiento o deformación de la

50
topografía respecto de la ubicación del radar. Además, hay que tener en cuenta que sea la
técnica que se use, los resultados no son una solución única y están supeditados a revisiones o
evaluaciones de su exactitud o fiabilidad (Chen & Zebker, 2002).
Para este caso se hizo uso del software Cygwin64, el cual puede correr el algoritmo
SNAPHU y desenrollar la fase, obteniendo así, la banda de coherencia y de fase
interferométrica, y una nueva banda de fase desenrollada. Se debe tener en cuenta que la
interferometría es una técnica relativa que trabaja con la diferencia entre pixeles y valores de
fase (no absolutos), por lo cual, se entiende que los resultados son también relativos, es decir,
los desplazamientos estimados deben ser ajustados más adelante en base a puntos de amarre
(tie points).
Figura 19: Fase interferometrica desenvuelta.
Fuente: Elaboración propia.
8.7 Estimación de velocidades de deformación del terreno
Con los valores de fase absolutos se calculan los movimientos de la superficie en unidades
métricas, teniendo en cuenta los puntos de vista de la antena.
En caso de que algunos de los dispersores de puntos en el suelo cambien ligeramente su
posición relativa en el intervalo de tiempo entre dos observaciones SAR (como, por ejemplo,
en caso de hundimiento, deslizamiento de tierra, terremoto, etc.), entonces el siguiente término
51
de fase aditiva, independiente de la línea base, aparece en la fase interferométrica (Fletcher
et al., 2007):
∆𝜑𝑑 = −4𝜋
𝜆𝑑 (31)
Donde λ es la longitud de onda transmitida, 𝜑𝑑 es el desplazamiento relativo del dispersor
proyectado en la dirección del rango inclinado. La variación de fase interferométrica se puede
dividir en tres contribuciones:
• Una variación de fase proporcional a la altitud relativa del terreno, referida a un
plano de referencia horizontal.
• Una variación de fase proporcional a la diferencia de rango inclinado de los objetivos
puntuales.
• Una variación de fase proporcional al desplazamiento del dispersor relativo.
Si está disponible un modelo de elevación digital (DEM), el primer término de fase (es decir,
la contribución de altitud) se puede restar de la fase interferométrica. Esta operación se conoce
como eliminación de fase topográfica. Si se dispone de datos orbitales precisos, el término de
la segunda fase también se puede calcular y restar de la fase interferométrica. Esta operación
se llama aplanamiento de interferogramas o eliminación de fase de tierra plana. Como resultado
de las dos operaciones anteriores, genera un mapa de fase proporcional solo al desplazamiento
relativo del terreno que puede ser calculado por (Fletcher et al., 2007).
𝑑 = −𝜆
4𝜋∆𝜑𝑑 (32)
Este operador convierte la fase interferométrica al mapa de desplazamiento.
Para que el mapa de desplazamiento sea generado de manera correcta se deberá proporcionar
al software un interferograma con fase de tierra plana y sin la fase topografica.
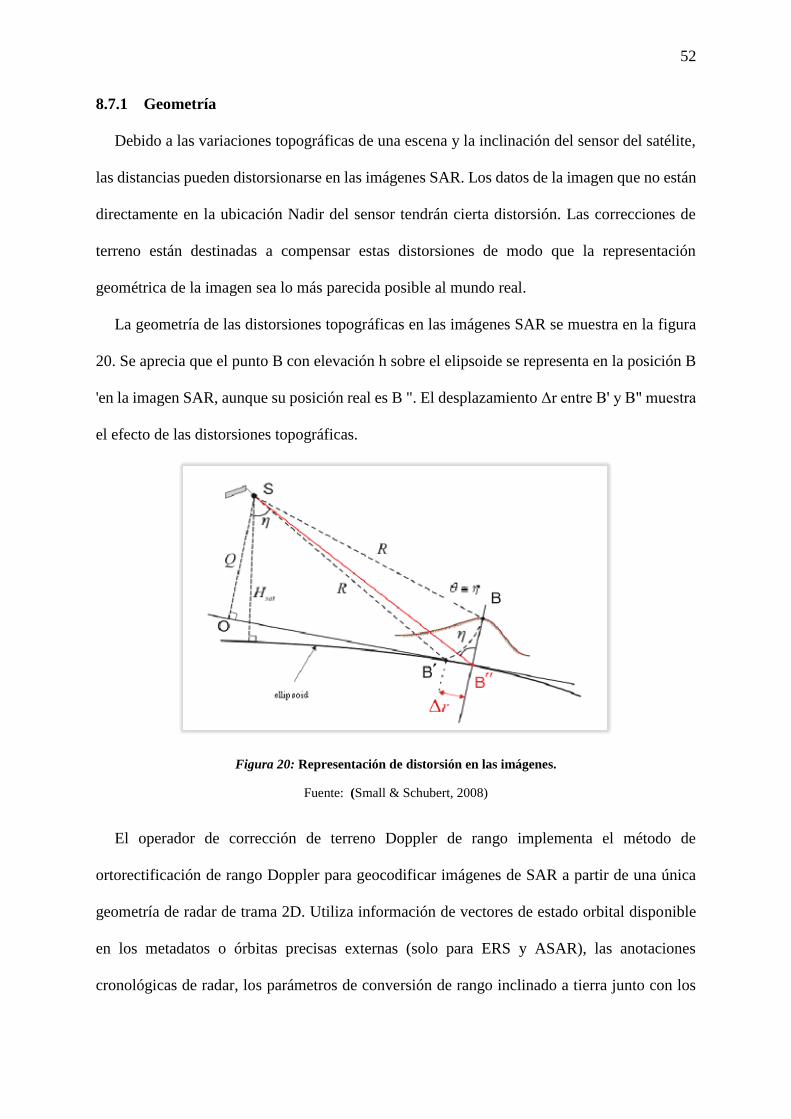
52
8.7.1 Geometría
Debido a las variaciones topográficas de una escena y la inclinación del sensor del satélite,
las distancias pueden distorsionarse en las imágenes SAR. Los datos de la imagen que no están
directamente en la ubicación Nadir del sensor tendrán cierta distorsión. Las correcciones de
terreno están destinadas a compensar estas distorsiones de modo que la representación
geométrica de la imagen sea lo más parecida posible al mundo real.
La geometría de las distorsiones topográficas en las imágenes SAR se muestra en la figura
20. Se aprecia que el punto B con elevación h sobre el elipsoide se representa en la posición B
'en la imagen SAR, aunque su posición real es B ". El desplazamiento Δr entre B' y B" muestra
el efecto de las distorsiones topográficas.
Figura 20: Representación de distorsión en las imágenes.
Fuente: (Small & Schubert, 2008)
El operador de corrección de terreno Doppler de rango implementa el método de
ortorectificación de rango Doppler para geocodificar imágenes de SAR a partir de una única
geometría de radar de trama 2D. Utiliza información de vectores de estado orbital disponible
en los metadatos o órbitas precisas externas (solo para ERS y ASAR), las anotaciones
cronológicas de radar, los parámetros de conversión de rango inclinado a tierra junto con los

53
datos DEM de referencia para obtener la información de geolocalización precisa (Small &
Schubert, 2008).
Actualmente, solo los DEM con coordenadas geográficas referidos a la referencia geodésica
global elipsoide WGS84 (y la altura en metros) están soportados adecuadamente. Se pueden
usar diferentes tipos de modelos de elevación digital (ACE, GETASSE30, ASTER, SRTM
3Sec GeoTiff). El SRTM se descargará automáticamente en mosaicos para que el área cubierta
por la imagen se ortorectifique. La información de altura (que se refiere al geoide EGM96) se
corrige automáticamente para obtener la altura relativa al elipsoide WGS84 (Small & Schubert,
2008).
La figura 21 muestra la fase interferometrica con los valores de deformacion del terreno en
unidades metricas, georreferenciado y ortorectificado.
Figura 21: Corrección geométrica.
Fuente: Elaboración propia
9 Resultados y Análisis
Con las imágenes disponibles se formaron 50 pares interferómetricos de los cuales se
seleccionaron 27 con el fin de minimizar el ruido en la fase interferometrica y garantizar
mejores resultados, por lo cual se obtuvieron 7 pares de imágenes con una resolución temporal

54
de 12 días, 17 pares de imágenes con una resolución temporal de 24 días, y 3 pares con una
resolución temporal de 36 días.
Tabla 3: Pares interferómetricos generados, línea base y su resolución temporal.
Maestra Esclava Linea_Base Resolución Temporal
11/12/2017 23/12/2017 40,39 12
29/11/2017 11/12/2017 7,45 12
5/11/2017 17/11/2017 35,67 -12
24/10/2017 5/11/2017 39,03 12
12/10/2017 24/10/2017 17,12 12
6/09/2017 12/10/2017 118,3 36
25/08/2017 6/09/2017 49,67 -12
20/07/2017 13/08/2017 50,70 -24
2/06/2017 8/07/2017 31,95 36
9/05/2017 2/06/2017 112,98 24
3/04/2017 9/05/2017 59,07 -36
10/03/2017 3/04/2017 3,12 24
26/02/2017 10/03/2017 17,68 12
10/11/2016 4/12/2016 58,89 24
11/10/2016 4/11/2016 10,34 -24
24/08/2016 17/09/2016 45,62 -24
31/07/2016 24/08/2016 15,32 -24
7/07/2016 31/07/2016 6,92 -24
13/06/2016 7/07/2016 9,12 24
20/05/2016 13/06/2016 48,23 24
26/04/2016 20/05/2016 27,07 -24
2/04/2016 26/04/2016 31,00 -24
9/03/2016 2/04/2016 43,07 24
14/02/2016 9/03/2016 17,83 -24
28/12/2015 14/02/2016 78,25 24
4/12/2015 28/12/2015 36,99 24
10/11/2015 4/12/2015 134,97 24
Fuente: Elaboración Propia
A partir de los pares de imágenes Sentinel 1 mencionados en la tabla 3, y aplicando los
procesos interferómetricos descritos en la metodología, se obtuvieron 2 mapas finales del área
urbana de la ciudad de Bogotá: el mapa de subsidencia del año 2016 está compuesto por los
interferogramas del 10/11/2015 hasta 10/11/2016 los cuales componen el primer periodo y el

55
mapa de subsidencia del año 2017 abarca los interferogramas del 10/11/2016 hasta 11/12/2017
que componen el segundo periodo.
Las figuras 22 y 23 están representadas con una rampa cromática de colores, en donde a
simple vista se pueden evidenciar variaciones en el nivel de subsidencia de la ciudad de Bogotá,
presentando mayor oscilación en la parte noroccidental y central de la ciudad.
Cabe resaltar que en los pares interferometricos escogidos para el presente trabajo e
ilustrados en la tabla 3, se pueden presentar cambios en las condiciones del terreno, tales como
la humedad debido a las variaciones en las condiciones climáticas, o las variaciones
presentadas en los acuíferos puesto que existen distintas técnicas de recuperación de estos.
Dado lo anterior, los resultados finales están afectados por estas variables lo que genera algunos
valores atípicos y ruido en las imágenes.
• Primer periodo
Figura 22: Subsidencia presentada en el año 2016.
Fuente: Elaboración Propia.
Como podemos evidenciar en la figura 22 las localidades de la ciudad de Bogotá que más
subsidencia presentan en el periodo de tiempo 10/11/2015 a 10/11/2016 son:

56
• Teusaquillo: Presenta una subsidencia que oscila entre los 15 mm y 30 mm.
• Barrios Unidos: Presenta una subsidencia que oscila entre los 11 mm y 30 mm.
• Engativá: Presenta una subsidencia que oscila entre los 15 mm y 28 mm.
• Fontibón: Presenta una subsidencia que oscila entre los 11 mm y 30 mm.
• Puente Aranda: Presenta una de las mayores oscilaciones en su subsidencia la cual
va desde 2 mm hasta 28 mm en su costado norte.
• Suba: Presenta una subsidencia con valores que oscilan entre 15 mm y 28 mm.
Las localidades de Kennedy y Bosa presentan un foco de subsidencia de 20 mm. Las demás
localidades no presentan subsidencia fuerte y hay zonas que se mantienen muy estables.
• Segundo Periodo
Figura 23: Subsidencia presentada en el año 2017
Fuente: Elaboración Propia
Como se evidencia en la figura 23 las localidades de la ciudad de Bogotá que más
subsidencia presentan en el periodo de tiempo 10/11/2016 – 11/12/2017 son:
• Teusaquillo: Presenta una subsidencia que oscila entre los 15 mm y 32 mm.

57
• Barrios Unidos: Presenta una subsidencia que oscila entre los 11 mm y 32 mm.
• Engativá: Presenta una subsidencia que oscila entre los 15 mm y 28 mm.
• Fontibón: Presenta una subsidencia que oscila entre los 11 mm y 30 mm.
• Puente Aranda: Presenta una de las mayores oscilaciones en su subsidencia la cual
va desde 2 mm hasta 28 mm en su costado norte.
• Suba: Presenta una subsidencia con valores que oscilan entre 15 mm y 29 mm.
Las localidades de Kennedy y Bosa presentan un foco de subsidencia de 20 mm. Las demás
localidades no presentan subsidencia fuerte y hay zonas que se mantienen muy estables.
En las figuras 22 y 23 se puede apreciar que los valores de subsidencia tanto para el año
2016 como para el 2017 son muy similares por lo cual presentan una variación mínima entre
cada periodo de tiempo.
Los resultados obtenidos con la metodología DInSAR en áreas urbanas en términos de
retrodispersión de la señal de radar no presenta fluctuaciones, debido principalmente a la
configuración de los edificios y la infraestructura urbana (Dávila & Madrigal, 2015), sin
embargo en los resultados obtenidos para ambos periodos de tiempo se puede apreciar que
tanto en la localidad de Suba como Usaquén hacia el norte no fue posible obtener los valores
de subsidencia debido a que los datos fueron afectados por la baja coherencia causada por la
vegetación existente. La figura 24 muestra la localización del área afectada.
Figura 24: Área afectada por la baja coherencia de los datos existentes.
Fuente: Elaboración propia

58
9.1 Comparación Subsidencia con los valores del SGC
Para la comparación se propuso tomar como referencia el mapa obtenido por el Servicio
Geológico Colombiano (SGC) el cual cubre la misma área de estudio propuesta para el presente
proyecto. Para lo cual se tomaron 6 zonas de referencia en las cuales se obtuvieron los valores
de subsidencia como se muestra en la tabla 4.
Tabla 4: Valores de máxima subsidencia obtenidos en el presente estudio vs valores obtenidos por el SGC
LOCALIDADES
SUBSIDENCIA
PRESENTE
ESTUDIO (2016)
SUBSIDENCIA
PRESENTE
ESTUDIO (2017)
SUBSIDENCIA
SGC
FONTIBON 30 mm 30 mm 27 mm
ENGATIVA 28 mm 28 mm 27 mm
TEUSAQUILLO 30 mm 32 mm 20 mm
BARRIOS UNIDOS 30 mm 32 mm 20 mm
PUENTE ARANDA 28 mm 28 mm 33 mm
SUBA 28 mm 29 mm 20 mm
Fuente: Elaboración propia con datos obtenidos de (Casa Editorial El Tiempo, 2018).
En un análisis inicial se puede resaltar que existen diferencias en los valores de subsidencia
obtenidos por el SGC y el presente trabajo. Se evidencia que ambos estudios muestran
resultados de subsidencia que no superan los 33 mm de subsidencia por año. Para la zona de
Fontibón el SGC encontró una subsidencia máxima de 27 mm, a lo cual en el presente estudio
se obtuvo un resultado máximo de 30 mm en los dos periodos de tiempo. Para el caso de
Teusaquillo el SGC obtuvo una subsidencia máxima de 20 mm en la zona, a lo cual en el
presente trabajo se obtuvo una subsidencia de 30 mm para el primer periodo y 32 mm para el
segundo periodo. Dado lo anterior, y los resultados expuestos en la tabla 4, se presentan
diferencias en los valores obtenidos en el presente trabajo con los valores que el SGC obtuvo
de aproximadamente 12 mm como máximo. Es de resaltar que determinadas zonas del presente
estudio no pudieron tenerse en cuenta debido a la presencia de datos atípicos, como se ilustro
en la figura 24, por lo cual no se pudo comparar con resultados obtenidos allí por el SGC.

59
Por último el SGC obtuvo los valores medios por año con datos recolectados de imágenes
satelitales desde el 2008 hasta el 2017 junto con técnicas de geodesia de posicionamiento GPS
de alta precisión, mientras que en el presente estudio solo se emplearon datos desde el 2015 a
2017 debido a la disponibilidad de información del satélite Sentinel 1.
9.2 Consecuencias de la subsidencia en la zona de estudio
Las consecuencias ocasionadas por la subsidencia en el área urbana de la ciudad de Bogotá
son difíciles de identificar a corto plazo, sin embargo es necesario tener en cuenta las
consecuencias futuras para la planificación del territorio tanto para el diseño de políticas que
permitan controlar las construcciones y abstracción de agua subterránea en las zonas con mayor
subsidencia como para proyectos como el metro.
La subsidencia a largo plazo puede perjudicar las edificaciones generando grietas en estos
así como en los canales y vías de comunicación lo cual puede ocasionar pérdidas económicas
para la ciudad, es por esto que la subsidencia es un factor importante a tener en cuenta en la
definición de criterios y zonificaciones en plan de ordenamiento territorial.
(Peña, Rueda, & García, 2010) sugieren que la actividad planificadora en materia territorial
necesita del conocimiento exhaustivo de todo aquello que afecta el territorio, preferentemente,
lo que pueda suponer riesgo para las personas y sus bienes, por lo cual esta variable de la
subsidencia en las ciudades posiblemente afectadas por sobre explotación de recursos naturales
sugerimos debe ser tomada en cuenta, puesto que en los casos más extremos la subsidencia ha
llegado a ocasionar el colapso de edificaciones y así perdidas económicas considerables.
Adicional a esto, se realizaron visitas esporádicas en campo en algunas de las zonas que
presentaron como resultado mayor subsidencia, encontrando en algunos casos daños en las
vías. En la figura 25 se puede observar la Ac 72, a la altura de la carrera 94, este punto está
ubicado en la Localidad de Engativá, en donde la vía presenta fallas estructurales notorias.

60
Figura 25: Ac 72, Localidad de Engativá
Fuente: Elaboración propia
En la figura 26 se puede observar la intersección de la Cll 18 con la Cra 69b, este punto está
ubicado en la Localidad de Fontibón, en donde la vía presenta igualmente fallas notorias.
Figura 26: Calle 18 con Carrera 69b
Fuente: Elaboración propia
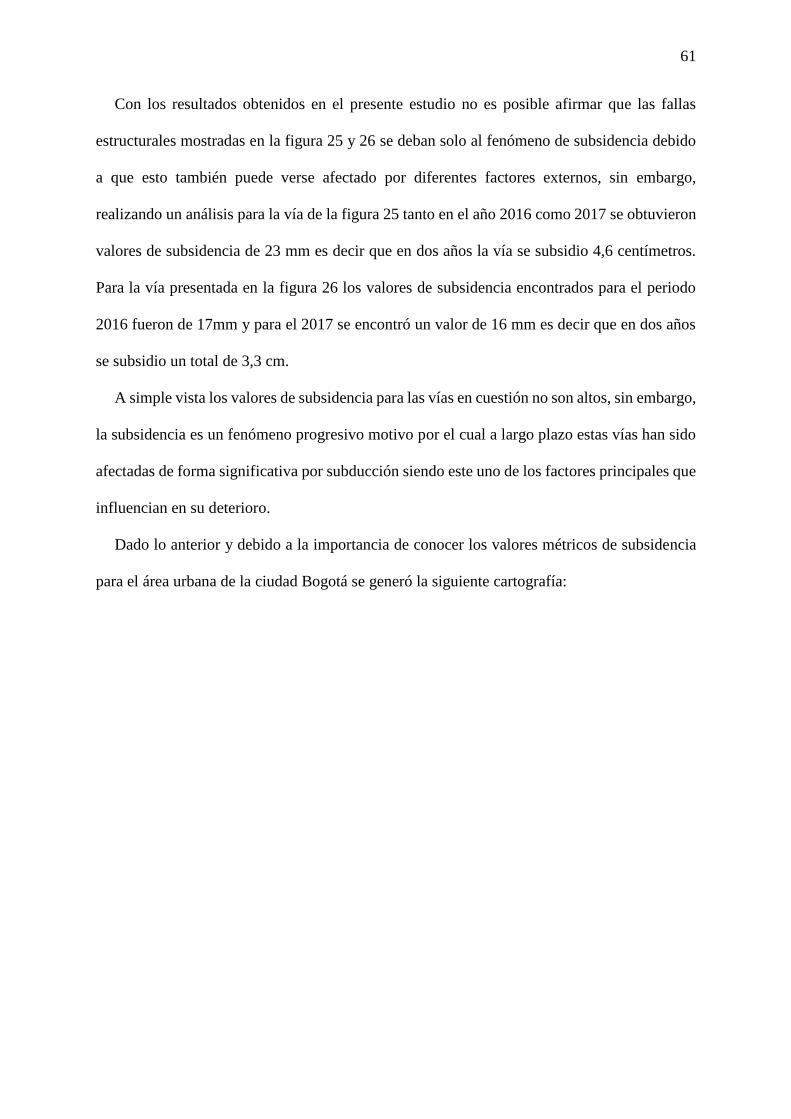
61
Con los resultados obtenidos en el presente estudio no es posible afirmar que las fallas
estructurales mostradas en la figura 25 y 26 se deban solo al fenómeno de subsidencia debido
a que esto también puede verse afectado por diferentes factores externos, sin embargo,
realizando un análisis para la vía de la figura 25 tanto en el año 2016 como 2017 se obtuvieron
valores de subsidencia de 23 mm es decir que en dos años la vía se subsidio 4,6 centímetros.
Para la vía presentada en la figura 26 los valores de subsidencia encontrados para el periodo
2016 fueron de 17mm y para el 2017 se encontró un valor de 16 mm es decir que en dos años
se subsidio un total de 3,3 cm.
A simple vista los valores de subsidencia para las vías en cuestión no son altos, sin embargo,
la subsidencia es un fenómeno progresivo motivo por el cual a largo plazo estas vías han sido
afectadas de forma significativa por subducción siendo este uno de los factores principales que
influencian en su deterioro.
Dado lo anterior y debido a la importancia de conocer los valores métricos de subsidencia
para el área urbana de la ciudad Bogotá se generó la siguiente cartografía:
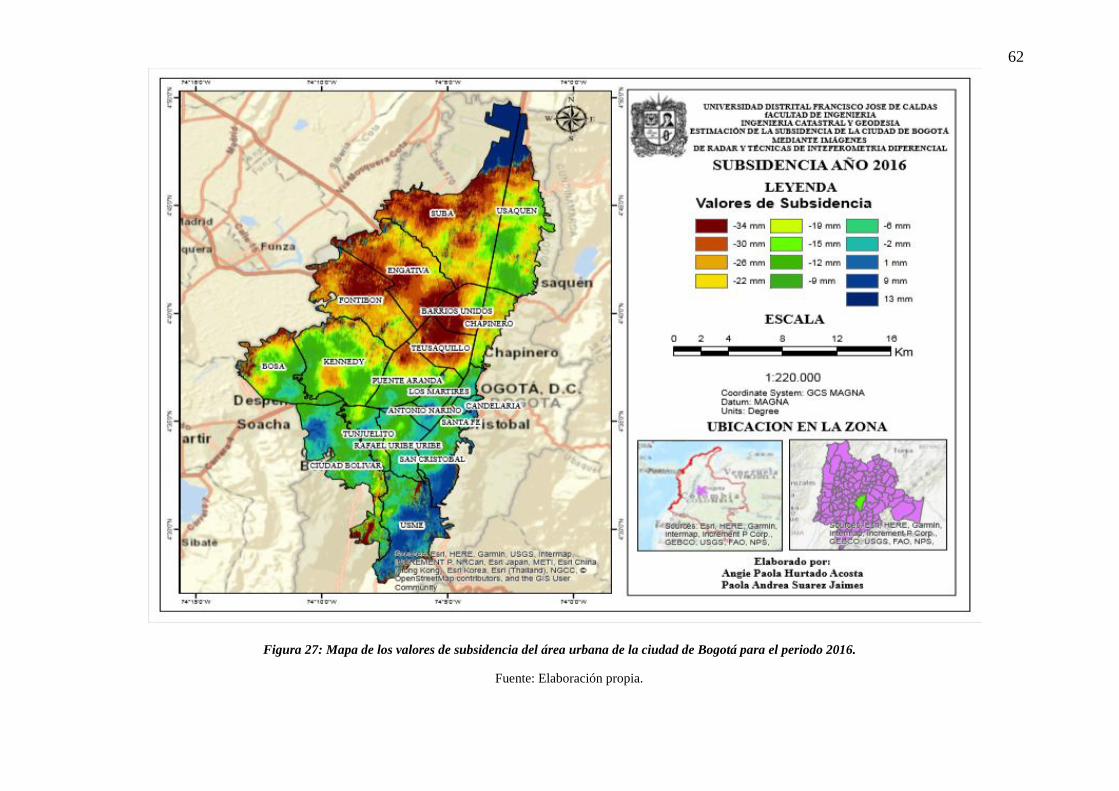
62
Figura 27: Mapa de los valores de subsidencia del área urbana de la ciudad de Bogotá para el periodo 2016.
Fuente: Elaboración propia.
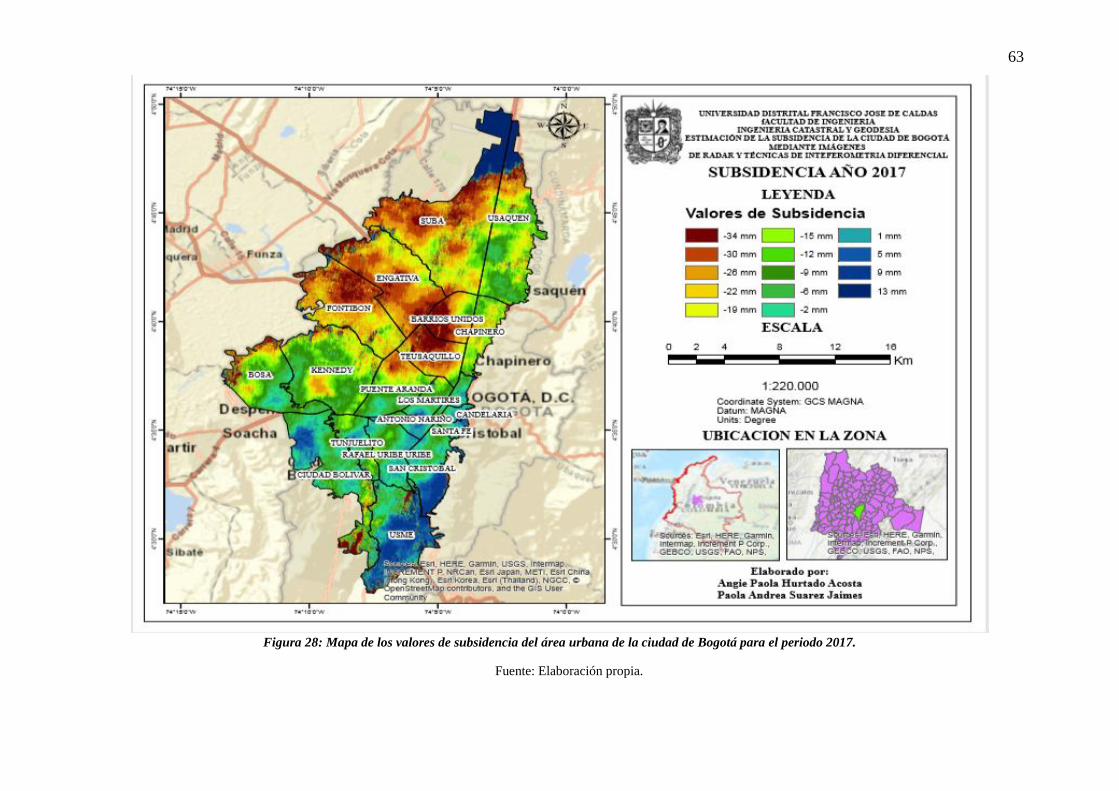
63
Figura 28: Mapa de los valores de subsidencia del área urbana de la ciudad de Bogotá para el periodo 2017.
Fuente: Elaboración propia.

64
10 Conclusiones
En este proyecto se obtuvieron dos salidas graficas con los valores de deformación del
terreno para el área urbana de la ciudad de Bogotá a partir de pares de imágenes de radar del
satélite Sentinel implementando la técnica de Interferometría Diferencial DInSAR. Después
del desarrollo y análisis del proyecto se concluye:
Se cumplieron los objetivos propuestos, puesto que se analizaron y procesaron pares
interferometricos con imágenes de Sentinel obtenidas desde el 2015 hasta el año 2017 y se
generó cartografía que permite visualizar y obtener los diferentes niveles de subsidencia para
la zona de estudio.
Las imágenes de Radar de Sentinel permiten obtener resultados óptimos para el análisis de
subsidencia del área urbana de una región, sin embargo como se comprobó en los resultados
obtenidos, las zonas donde se presenta una mayor cobertura vegetal generan una coherencia
baja por lo cual no se pueden conseguir valores fiables. También es de tener en cuenta que
variables como la atmosfera y la ionosfera afectan los datos en el momento de la adquisición
de las imágenes por lo cual el proceso interferometrico se ve afectado y es necesario contar con
varios pares de imágenes con diferentes temporalidades con el fin de seleccionar las más
adecuadas y depurar las que contienen mayor ruido o las que presentan un interferograma
incoherente.
Por otra parte, las características propias de los radares, las condiciones en el momento de
la toma de datos, la variedad de imágenes y constelaciones, la inclusión de factores tales como
puntos de control, la presencia de distorsiones geométricas tales como sombras, inversión por
relieve o layover, escorzo o foreshortening, entre otros, pueden influir en la variación de los
resultados obtenidos en el presente trabajo.

65
Los datos obtenidos en los dos años presentan una diferencia mínima en los valores de
deformación del terreno, por lo cual se logró detectar las zonas de Bogotá con tendencia a
presentar mayores niveles de subsidencia. Este estudio debería ser una variable a tener en
cuenta en la toma de decisiones en la planificación del territorio ya que la subsidencia es un
fenómeno paulatino pero que puede llegar a tener repercusiones en grandes obras de
infraestructura, puesto que la dinámica del suelo está variando. Adicionalmente dado que los
resultados obtenidos permiten evidenciar subsidencia en zonas puntuales y estratégicas de la
ciudad sirven como base para la creación de planes de mitigación y enfocar esfuerzos.
Se evidencio que el Software Sentinel Application Platform (SNAP) y todos los
procesamientos de las imágenes demandan un hardware potente, por lo cual para próximas
investigaciones que requieran mayor cantidad de imágenes y procesos se aconseja contar con
buenos recursos físicos en la máquina. Así mismo se demuestra que es posible hacer uso de
insumos de carácter libre con los cuales se puede obtener un estudio no solo de subsidencia,
sino de detección de zonas de riesgo por deslizamiento, terremotos, volcanes etc. con técnicas
de interferómetria Diferencial, las cuales son herramientas que están siendo muy solicitadas y
empleadas alrededor del mundo.
El desarrollo de este proyecto generó la posibilidad de trabajar a futuro técnicas más
especializadas con la interferometría diferencial introduciendo puntos de control al estudio para
lograr una mayor precisión.
11 Anexos
Anexo 1: Cartografía Subsidencia 2016
Anexo 2: Cartografía Subsidencia 2017

66
12 Referencias
Abellaneda Lario, M. (2016). Estudio y análisis de la subsidencia del terreno en la cuenca del Alto Guadalentín. Investigaciones previas, evolución, causas y consecuencias. Recuperado a partir de http://rua.ua.es/dspace/handle/10045/54865
Alcaldía Local de Suba. (2013). La Cuestión Indígena y Ambiental de Suba. Recuperado 1 de octubre
de 2017, a partir de http://www.suba.gov.co/mi-localidad/conociendo-mi-localidad/historia
Arbiol, R. (2014). Fundamentos de tecnología y técnicas Radar. Instituto Cartográfico de Cataluña, 77.
Bear, J., & Corapcioglu, M. Y. (2012). Fundamentals of Transport Phenomena in Porous Media. Springer
Science & Business Media.
Blumenthal, R. L. (2013, enero 1). Remote sensing. En Salem Press Encyclopedia of Science.
Recuperado a partir de http://search.ebscohost.com/login.aspx?direct=true&db=ers&AN=88806550&site=eds-live
Casa Editorial El Tiempo, C. E. E. (2018). ¡Increíble!: así, poco a poco, se hunde Bogotá. Recuperado 2
de mayo de 2018, a partir de http://www.eltiempo.com/vida/ciencia/informe-sobre-como-se-hunde-el-terreno-en-bogota-189448
Chen, C. W., & Zebker, H. A. (2002). Phase unwrapping for large SAR interferograms: statistical
segmentation and generalized network models. IEEE Transactions on Geoscience and Remote Sensing, Geoscience and Remote Sensing, IEEE Transactions on, IEEE Trans. Geosci. Remote Sensing, (8), 1709. https://doi.org/10.1109/TGRS.2002.802453
Chuvieco, E. (1995). Fundamentos de teledetección espacial. Madrid, Alcalá, España: EDICIONES RIALP
S.A.
Dávila, H. N. A., & Madrigal, U. D. (2015). Aplicación de interferometría radar en el estudio de
subsidencias en el Valle de Toluca, México. Ciencias Espaciales, 8(1), 294–309.
Delgado, J., Vicente, F., García-Tortosa, F., Alfaro, P., Estévez, A., Lopez-Sanchez, J. M., … Mallorquí, J.
J. (2011). A deep seated compound rotational rock slide and rock spread in SE Spain: Structural control and DInSAR monitoring. Geomorphology, 129(3-4), 252-262. https://doi.org/10.1016/j.geomorph.2011.02.019
Departamento Administrativo Nacional de Estadística. (2009). Proyecciones de población. Recuperado
29 de octubre de 2017, a partir de http://www.dane.gov.co/index.php/estadisticas-por-tema/demografia-y-poblacion/proyecciones-de-poblacion
ESA. (2016). Introducing Sentinel-1. Recuperado 2 de octubre de 2017, a partir de
http://www.esa.int/Our_Activities/Observing_the_Earth/Copernicus/Sentinel-1/Introducing_Sentinel-1
ESA. (2018a). Core Ground Segment - Sentinel-1 - Missions. Recuperado 2 de marzo de 2018, a partir
de https://sentinel.esa.int/web/sentinel/missions/sentinel-1/ground-segment/core-ground-segment

67
ESA. (2018b). Sentinel-1 - Data Distribution Schedule - Missions. Recuperado 5 de marzo de 2018, a partir de https://sentinel.esa.int/web/sentinel/missions/sentinel-1/data-distribution-schedule
ESA. (2018c). Sentinel-1 - Data Products. Recuperado 7 de marzo de 2018, a partir de
https://sentinel.esa.int/web/sentinel/missions/sentinel-1/data-products
ESA. (2018d). Sentinel-1 - Instrument Payload. Recuperado 5 de marzo de 2018, a partir de
https://sentinel.esa.int/web/sentinel/missions/sentinel-1/instrument-payload
ESA. (2018e). Sentinel-1 - Overview. Recuperado 5 de marzo de 2018, a partir de
https://sentinel.esa.int/web/sentinel/missions/sentinel-1/overview
ESA. (2018f). SNAP. Recuperado 4 de octubre de 2017, a partir de
http://step.esa.int/main/toolboxes/snap/
European Space Agency. (2018). The Sentinel Application Platform (SNAP) (Versión 6.0.0). Recuperado
a partir de http://step.esa.int/main/download/
Fernández, M. P. (2009). Determinación de movimientos verticales del terreno mediante técnicas de
interferometría Radar DInSAR. Editorial de la Universidad de Granada, Granada.
Fletcher, A., Monti-Guarnieri, A., Prati, C., & Rocca, F. (2007). InSAR Principles: Guidelines for SAR
Interferometry Processing and Interpretation. ESA.
Fournier, P., & Ridicck. (2010). Duration, magnitude, and frequency of subaerial volcano deformation
events: New results from Latin America using InSAR and a global synthesis. Geochemestry Geophysics Geosystems, 11. https://doi.org/10.1029/2009GC002558
Galloway, D. L., Jones, D. R., & Ingebritsen, S. E. (Eds.). (1999). Land subsidence in the United States.
Reston, VA: U.S. Geological Survey.
Geocento Earth Imaging. (2015). Satélite de imágenes SENTINEL 1. Recuperado 2 de marzo de 2018, a
partir de http://geocento.es/galeria-de-satelites-para-buscar-y-adquirir-imagenes/satelite-imagenes-sentinel-1/
Goldstein, R. M., & Werner, C. L. (1998). Radar interferogram filtering for geophysical applications.
Geophysical Research Letters, 25(21), 4035-4038. https://doi.org/10.1029/1998GL900033
Hanssen, R. F. (2001). Radar Interferometry: Data Interpretation and Error Analysis. Springer Science
& Business Media.
Hermelín, M., & Agudelo, A. P. (2007). Entorno natural de 17 ciudades de Colombia. Medellín: Fondo
Editorial Universidad EAFIT ; [Bogotá] Sociedad Colombiana de Geología Academia Colombiana de Ciencias Exactas, Físicas y Naturales.
Jiménez, J. D. (2013). Movimientos de ladera en la vertiente meridional de Sierra Nevada (Granada,
España): identificación, análisis y cartografía de susceptibilidad y peligrosidad mediante SIG. Editorial de la Universidad de Granada, Granada.

68
Kim, J.-W., & Lu, Z. (2018). Association between localized geohazards in West Texas and human activities, recognized by Sentinel-1A/B satellite radar imagery. Scientific Reports, 8(1). https://doi.org/10.1038/s41598-018-23143-6
Klees, R., & Massonnet, D. (1998). Deformation measurements using SAR interferometry: potential
and limitations. Geologie en Mijnbouw, 77(2), 161–176.
Kramer, H. (2002). Copernicus: Sentinel-1 - Satellite Missions - eoPortal Directory. Recuperado 27 de
marzo de 2018, a partir de https://directory.eoportal.org/web/eoportal/satellite-missions/c-missions/copernicus-sentinel-1
Li, Z., & Bethel, J. (2008). IMAGE COREGISTRATION INSAR INTERFEROMETRY, 6.
Lundgren, S., & López, O. (2015). Deep source model for Nevado del Ruiz Volcano,Colombia,
constrained by interferometric synthetic aperture radar observations. Geophysical Research Letters, 4816-4823. https://doi.org/10.1002/2015GL063858
Massonnet, D., & Feigl, K. L. (1998). Radar interferometry and its application to changes in the Earth’s
surface. Reviews of Geophysics, 36(4), 441-500. https://doi.org/10.1029/97RG03139
Mayorga, T. M. (2013). Determinación de la deformación del terreno por movimientos en masa
usando interferometría SAR (Radar de Apertura Sintética). Universidad Nacional de Córdoba, Instituto de Altos Estudios Espaciales «Mario Gulich», Comisión Nacional de Actividades Espaciales (CONAE)., 228.
Ogundare, J. O. (2015). Precision Surveying: The Principles and Geomatics Practice. Hoboken, UNITED
STATES: John Wiley & Sons, Incorporated. Recuperado a partir de http://ebookcentral.proquest.com/lib/bibliojaveriana-ebooks/detail.action?docID=4043017
Parks, B., Mather, P., Amelung, M., & Medina. (2011). Co-eruptive subsidence at Galeras identified
during an InSAR survey of Colombian volcanoes (2006–2009). Volcalology and Geothermal Research, 228-240. https://doi.org/10.1016/j.jvolgeores.2011.02.007
Peña, J. M. de la, Rueda, R. A., & García, A. Á. C. (2010). La subsidencia del terreno en la ciudad y área
metropolitana de Murcia. IGME.
Pérez, C., & Muñoz, A. L. (2006). Teledetección: nociones y aplicaciones. Universidad de Salamanca.
Prokopovich, N. P. (1986). Classification of land subsidence by origin. En Proceedings of the 3rd
international symposium on land subsidence (Vol. 151, pp. 281–290). Recuperado a partir de http://hydrologie.org/redbooks/a151/iahs_151_0281.pdf
Rivadeneira, R. (2001). De Santafé a Bogotá: el crecimiento de la ciudad en sus mapas e imágenes.
Recuperado 1 de octubre de 2017, a partir de http://www.banrepcultural.org/node/32509
Russo, M. E. (2012). Interferometry Principles and Applications. Hauppauge, N.Y.: Nova Science
Publishers, Inc.
Saldierna-Ramos, J. J., De la Garza-Requena, F. R., Ventura-Houle, R., Heyer-Rodríguez, L., & Salinas-
Castillo, W. (2014). AGUA SUBTERRÁNEA: Fuente de vida bajo nuestros pies, Y su administración en regiones áridas. Agroproductividad, 7(1), 39-43.

69
Sánchez, P. B. (2014). Interferometría SAR: Conceptos y Aplicaciones Topográficas. Instituto
Cartográfico de Cataluña, 65.
Sánchez, P. B., Arciniegas, G. B., & Abaunza, D. O. (2010). LA INTERFEROMETRÍA DIFERENCIAL DInSAR–
UNA TÉCNICA PARA EL MONITOREO DE LA SUBSIDENCIA EN BOGOTÁ DC (Conocimiento y Reflexión) DInSAR DIFFERENTIAL INTERFEROMETRY-A TECHNIQUE FOR SUBSIDENCE MONITORING IN BOGOTÁ DC (Knowledge. Recuperado a partir de http://www.icc.es/index.php/cat/content/download/20083/64365/file/12_ARTICULO%20Boletin%20Colombiano%20de%20Geotecnia%20GBA.pdf
SARMAP. (2009). Synthetic Aperture Radar - Guidebook. Shi, Z. (2011). Improving Goldstein filter by image entropy for InSAR interferogram filtering. IEEE
Transactions on Geoscience and Remote Sensing. Sillerico, E., Marchamalo, M., Rejas, J. G., & Martínez, R. (2010). La técnica DInSAR: bases y aplicación
a la medición de subsidencias del terreno en la construcción. Informes de la Construcción, 62(519), 47-53. https://doi.org/10.3989/ic.09.063
Simons, M., & Rosen, P. A. (2007). Interferometric Synthetic Aperture Radar Geodesy. Reference
Module in Earth Systems and Environmental Sciences Treatise on Geophysics, 3, 391-446.
Skolnik, M. I. (1962). Introduction to radar. Radar Handbook, 2.
Small, D., & Schubert, A. (2008). Guide to ASAR Geocoding. University of Zurich.
Sobrino, J. A., & Rodríguez, J. A. S. (2001). Teledetección. Universitat de València.
Sousa, J. J., Ruiz, A. M., Hanssen, R. F., Bastos, L., Gil, A. J., Galindo-Zaldívar, J., & Sanz de Galdeano, C.
(2010). PS-InSAR processing methodologies in the detection of field surface deformation—Study of the Granada basin (Central Betic Cordilleras, southern Spain). Journal of Geodynamics, 49(3-4), 181-189. https://doi.org/10.1016/j.jog.2009.12.002
Susaki, J., Tsujino, M., & Anahara, T. (2017). Fusion of different frequency SAR images for DInSAR-
based land subsidence monitoring. En 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS) (pp. 945-948). https://doi.org/10.1109/IGARSS.2017.8127109
Tomás, R., Herrera, G., Delgado, J., Lopez-Sanchez, J. M., Mallorquí, J. J., & Mulas, J. (2010). A ground
subsidence study based on DInSAR data: Calibration of soil parameters and subsidence prediction in Murcia City (Spain). Engineering Geology, 111(1-4), 19-30. https://doi.org/10.1016/j.enggeo.2009.11.004
Tomás, R., Herrera, G., Delgado, J., & Peña, F. (2009). Subsidencia del terreno. Enseñanza de las
Ciencias de la Tierra, 17(3), 295-302.
United Nations. (2014). World Urbanization Prospects - Population Division - United Nations.
Recuperado 29 de octubre de 2017, a partir de https://esa.un.org/unpd/wup/
Veci, L. (2016). Sentinel-1 Toolbox Interferometry Tutorial, 41.
Related Documents











