ROBOTICA AVANZADA TRABAJO COLABORATIVO No.3

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 1/35
ROBOTICA AVANZADA
TRABAJO COLABORATIVO No.3

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 2/35
INTRODUCCIÓN
En la Robótica para el diseo de robots !ó"iles # !anip$ladores% es e"identela necesidad de poder describir adec$ada!ente las posiciones # orientacionesde los ob&etos '$e co!ponen al robot # s$ entorno en el espacio.
(ATLAB en el )rea de Robótica es de *ran $tilidad *racias a s$s operaciones!atriciales% por lo c$al res$lta de *ran a#$da para el trata!iento detrans+or!aciones # !odelos de robots% en c$anto a $n siste!a de re+erenciapara la posición # la orientación en procesos robóticos.
La Toolbo, -E(ERO -erra!ienta (atlab/si!$lin0 para el Est$dio de!anip$ladores # Robots !ó"iles1 contiene $n con&$nto de instr$cciones '$e
+acilitan el !ane&o de las !atrices '$e representan la posición # orientación desiste!as de re+erencia. De i*$al !anera per!ite la "is$ali2ación es'$e!)ticade los !anip$ladores # siste!as de re+erencia in"ol$crados% ade!)s deper!itir "eri+icar *r)+ica!ente los ca!bios% debido a las trans+or!aciones detraslación # rotación.

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 3/35
Primera Parte:
Cada *r$po de traba&o% disear) $n c$adro en el '$e relacionen cada $no delos co!andos $tili2ados en esta tercera $nidad en el pro*ra!a de CILAB ó(ATLAB1% especi+icando la sinta,is # +inalidad de cada $no% ade!)s de!antener $na constante co!$nicación con todos s$s co!paeros del *r$po.
COMANDOS SINTAXIS Propósito
syms s#!s , # 2 Crea las "ariables si!bólicas ,% #%2.
simpler 4 si!ple15r%6o78 4 si!ple1
Este +ic6ero de co!ando reali2a$n dia*ra!a sencillo dela +$nción sin. $pone '$e al+a"iene de+inido en elespacio de traba&o antes de '$esolicite el arc6i"o.
simplify R 4 si!pli+#1 e"al$ar e,presiones '$econten*an "ariables
factor + 4 +actorn1 Ca!bia +actori2a1 $na e,presiónen +or!a de polino!io # da co!osalida otra e,presión si!bólicaco!p$esta por prod$ctos depolino!ios de *rado !enor.
expa!
e,pand1 Desarrolla e,presiones aplica lapropiedad distrib$ti"a1. 9ri!erores$el"e lo prod$cto de t:r!inos'$e incl$#en s$!as de al !enos$n t:r!ino1% # posterior!ente$tili2a identidades tri*ono!:tricas
e,ponenciales # lo*ar;t!icas paradesarrollar los t:r!inoscorrespondientes '$e incl$#endic6as s$!as.
collectR 4 collect1R 4 collect%"1
A*re*a los t:r!inos de i*$alpotencia '$e se enc$entra dentrode $na e,presión.
P"eA
rot# TC 4 rot2 pi < 3 1 =
TA
9ara obtener las ra;ces de $n
polino!io

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 4/35
trasl TB 4 transl 3 % >% ? 1 traslado a las coordenadas
axis a,is 5 ? @ ? > 8 1 Deter!inación de ran*os derepresentación
rotate$!
rotate3d Acti"ación para +acilitar el *iro de
la representación% Acti"ación delos e+ectos rotacionalesani!ación1
Pe% 9enB 4 5 p, p# ? 8 calc$la las co!ponentesprincipales
&tra& r 4 &tra& ? % % t1 9ara generar una trayectoria
ctra& TC 4 ctra& TO% T% r1 obtene!os la tra#ectoriacartesiana.
plot plot t % transl TC 1 1 desplie*a $na *r)+ica de 3D
'ri! o *rid on Adicionarle re&illa a larepresentación
()aterio ' 4 '$aternion 5s "" "381
de F ele!entos
(iterp 'interp ' % ' % ? interpolación de $nidades dec$aternios
rotx t 4 rot, ?. 1 to!an el )n*$lo t # retornan $na!atri2 de rotación
!* d6 4 5 ? ? t ? ? ? lt ? ? ? l t3 ? ? 8 se re+iere a $n !:todo !atricial
stol stol 4 e ili!it 4 ???
Deter!inación de la tolerancia # elnG!ero !),i!o de iteraciones
s(rt d 4 s'rt ,. H #.H 1
calc$la ra;2 c$adrada
i+ie ' 4 i0ine d6 % stol %li!it%T % 5? ? ?8 % 5 ? ? ? 8 1
Calc$lar la cine!)tica in"ersa de$n !anip$lador
syms s#!s t t real obtención del !odelo din)!icosi!bólico
(! 'd 4 5 td td 8 Vector de "elocidades artic$lares
,- KK "? 4 5 ? ? ? 8 Vector "elocidad lineal
simple T4si!ple +0ined6%'1 1
La +$nción si!ple se encar*a desi!pli+icar la e,presión res$ltante.
,elprop2 4 si!ple "elpropd6% '% 'd% "?% 7? 1 1
Calc$lar el "ector de "elocidadesen el espacio cartesianoe,presado en el siste!a decoordenadas del c$adro nM

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 5/35
&aco. J 4&acobn p>? % ' 1 El Jacobiano en el siste!a dere+erencia del e+ector +inal
!et det J1 Obser"ar la condición dein"ertibilidad
,el "el 4 5 ?. ? ? ? ? ? 8 Velocidad artic$lar
/0RPKK L.R9 9ar)!etros de Dena"it -artenber*
'$e i!ple!entan !odeloscine!)ticos
/01KK L.R9 9ar)!etros de Dena"it -artenber*
'$e i!ple!entan !odeloscine!)ticos
/0TcKK L.Tc 4 > 9ar)!etros de Dena"it -artenber*
'$e i!ple!entan !odelos
cine!)ticoss*o2li+ s6o7lin0 L 1 Vis$ali2ación de los par)!etros
t*ro)'* Col$!ns t6ro$*6 In*reso de los "alores respecti"os
py p# 4 L = sin t61 L =sin t6 t61
se deno!ina !atri2 b)sica detraslación
!yd#n 4 5 ? ? t ? ? !l ? ? ? ? ? ? ? ? ? ? ? ?8
los par)!etros din)!icos del!anip$lador
'ra, KK *ra" 4 5? *? 8
el "ector de aceleración de la*ra"edad
roty 4 rot# pi < 1 Rotación
orm nor! '1 retorna la !a*nit$d del c$aternio

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 6/35
Se')!a Parte:
Cada inte*rante debe reali2ar los e&ercicios '$e se !$estran a contin$ación%$tili2ando la 6erra!ienta co!p$tacional CILAB ó (ATLAB to!ar pantalla2ode cada operación reali2ada para ane,ar al in+or!e1
De ac$erdo a las si*$ientes *r)+icas # e&e!plos% 6allar
"0 Traslación p$ra de ?.>% ?.P> # en la dirección de los e&es Q% # Z.
30 Rotación de F>% ?% ?%? # P? *rados% en torno a los e&es Q% # Z.
$0 Rotación de /F>% /?% /?%/? # /P? *rados% en torno a los e&es Q% # Z.
SO/UCION:
"0 Traslació p)ra !e -0345 -064 y " e la !irecció !e los e&es X5 7 y 80
Traslació p)ra !e -034 e la !irecció !e los e&es X0

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 7/35
Traslació p)ra !e -064 e la !irecció !e los e&es X0

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 8/35
Traslació p)ra !e "0-- e la !irecció !e los e&es X0
Traslació p)ra !e -0345 -064 y " e la !irecció !e los e&es X0

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 9/35
Traslació p)ra !e -034 e la !irecció !e los e&es 70
Traslació p)ra !e -064 e la !irecció !e los e&es 70
Traslació p)ra !e "0-- e la !irecció !e los e&es 70

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 10/35
Traslació p)ra !e -0345 -064 y " e la !irecció !e los e&es 70

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 11/35
Traslació p)ra !e -034 e la !irecció !e los e&es 80
Traslació p)ra !e -064 e la !irecció !e los e&es 80

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 12/35
Traslació p)ra !e "0-- e la !irecció !e los e&es 80
Traslació p)ra !e -0345 -064 y " e la !irecció !e los e&es 80

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 13/35
30 Rotació !e 945 -5 "3-5";- y 36- 'ra!os5 e toro a los e&es X5 7 y 80
Rotació !e 94 'ra!os5 e toro a los e&es X0

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 14/35
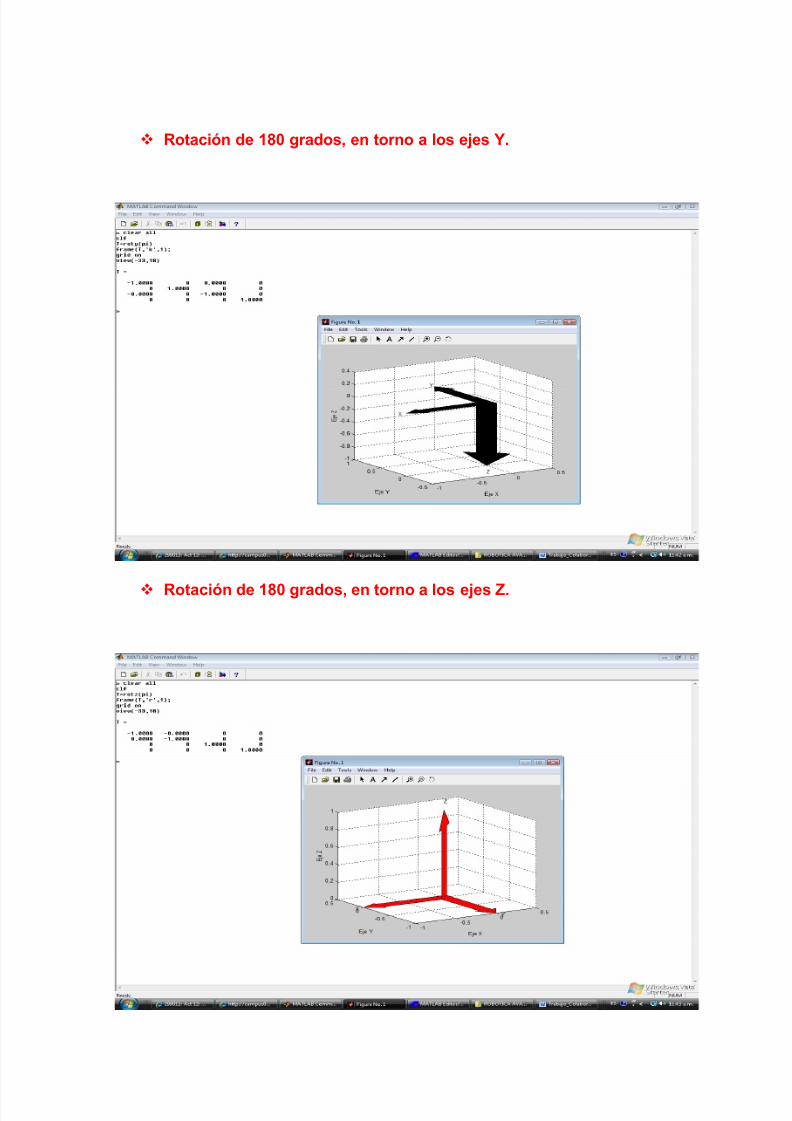
Rotació !e 94 'ra!os5 e toro a los e&es 70
Rotació !e 94 'ra!os5 e toro a los e&es 80

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 15/35
Rotació !e 94 'ra!os5 e toro a los e&es X5 7 y 80
Rotació !e - 'ra!os5 e toro a los e&es X0

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 16/35
Rotació !e - 'ra!os5 e toro a los e&es 70
Rotació !e - 'ra!os5 e toro a los e&es 80

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 17/35
Rotació !e - 'ra!os5 e toro a los e&es X5 7 y 80
Rotació !e "3- 'ra!os5 e toro a los e&es X0

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 18/35
Rotació !e "3- 'ra!os5 e toro a los e&es 70
Rotació !e "3- 'ra!os5 e toro a los e&es 80

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 19/35
Rotació !e "3- 'ra!os5 e toro a los e&es X5 7 y 80
Rotació !e ";- 'ra!os5 e toro a los e&es X0
7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 20/35
Rotació !e ";- 'ra!os5 e toro a los e&es 70
Rotació !e ";- 'ra!os5 e toro a los e&es 80

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 21/35
Rotació !e ";- 'ra!os5 e toro a los e&es X5 7 y 80
Rotació !e 36- 'ra!os5 e toro a los e&es X0

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 22/35
Rotació !e 36- 'ra!os5 e toro a los e&es 70
Rotació !e 36- 'ra!os5 e toro a los e&es 80

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 23/35
Rotació !e 36- 'ra!os5 e toro a los e&es X5 7 y 80
$0 Rotació !e <945 <-5 <"3-5<";- y <36- 'ra!os5 e toro a los e&es X5 7 y
80
Rotació !e <94 'ra!os5 e toro a los e&es X0

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 24/35
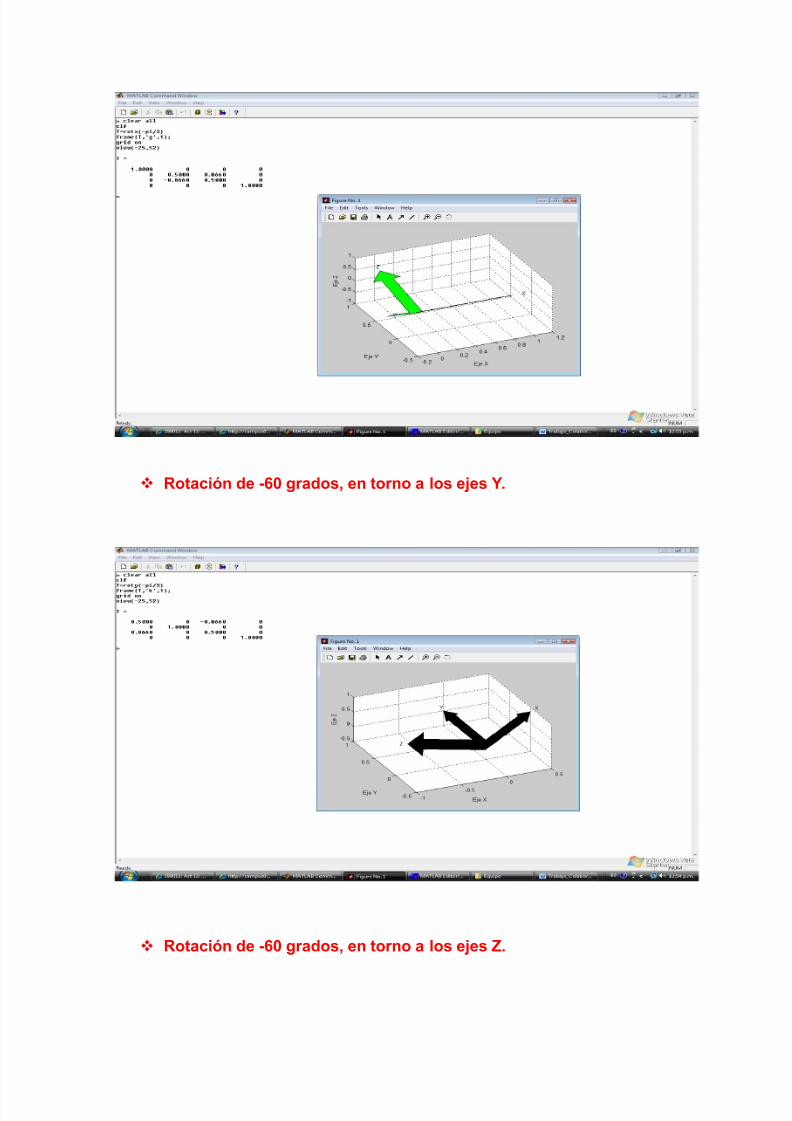
Rotació !e <94 'ra!os5 e toro a los e&es 70
Rotació !e <94 'ra!os5 e toro a los e&es 80

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 25/35
Rotació !e <94 'ra!os5 e toro a los e&es X5 7 y 80
Rotació !e <- 'ra!os5 e toro a los e&es X0
7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 26/35
Rotació !e <- 'ra!os5 e toro a los e&es 70
Rotació !e <- 'ra!os5 e toro a los e&es 80

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 27/35
Rotació !e <- 'ra!os5 e toro a los e&es X5 7 y 80
Rotació !e <"3- 'ra!os5 e toro a los e&es X0
7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 28/35
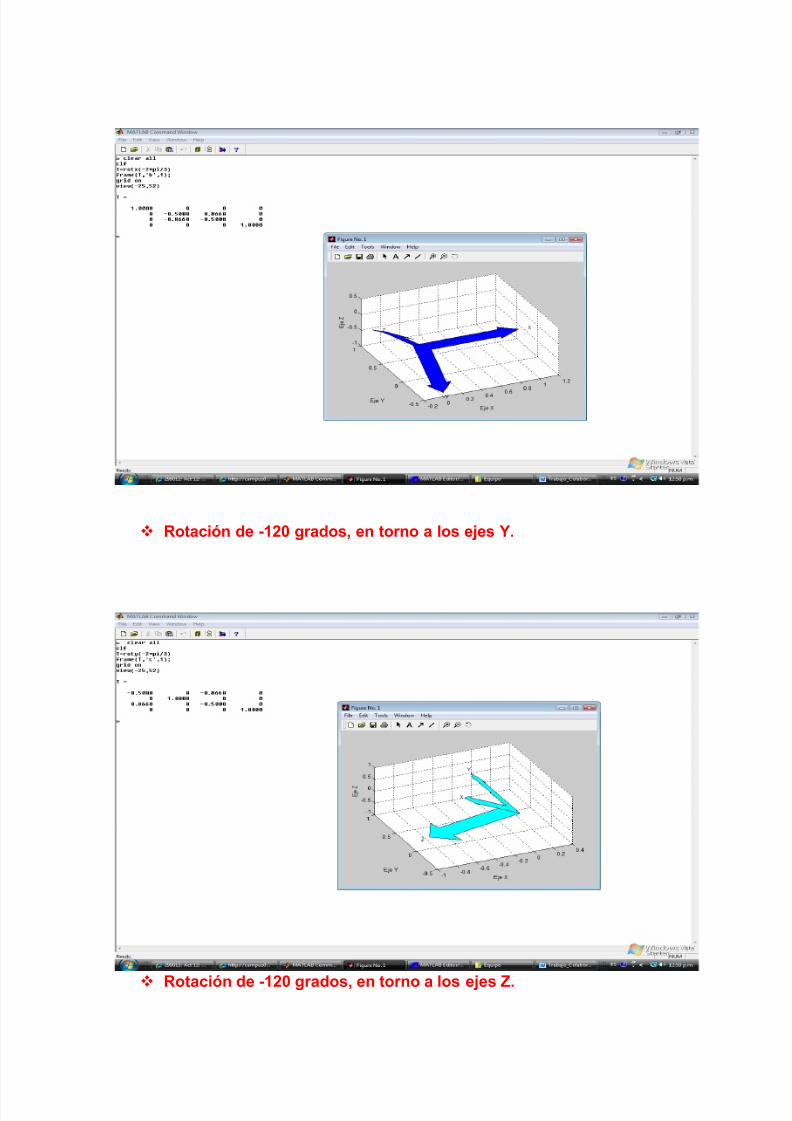
Rotació !e <"3- 'ra!os5 e toro a los e&es 70
Rotació !e <"3- 'ra!os5 e toro a los e&es 80

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 29/35
Rotació !e <"3- 'ra!os5 e toro a los e&es X5 7 y 80
Rotació !e <";- 'ra!os5 e toro a los e&es X0

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 30/35
Rotació !e <";- 'ra!os5 e toro a los e&es 70
Rotació !e <";- 'ra!os5 e toro a los e&es 80

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 31/35
Rotació !e <";- 'ra!os5 e toro a los e&es X5 7 y 80
Rotació !e <36- 'ra!os5 e toro a los e&es X0

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 32/35
Rotació !e <36- 'ra!os5 e toro a los e&es 70
Rotació !e <36- 'ra!os5 e toro a los e&es 80

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 33/35
Rotació !e <36- 'ra!os5 e toro a los e&es X5 7 y 80
CONC/USION=S

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 34/35
La robótica se 6a caracteri2ado por el desarrollo de siste!as cada "e2!)s +le,ibles% "ers)tiles # poli"alentes% !ediante la $tili2ación de n$e"asestr$ct$ras # de n$e"os !:todos de control # percepción.
Encontrar la sol$ción a estos !odelos se torna en*orroso # se corre elries*o del '$e el !)s !;ni!o error '$e se co!eta en este procedi!ientoo no nos per!ite encontrar $na resp$esta o esta sea errónea.
racias al (atlab se p$ede estar se*$ro sobre la resp$esta dada #ade!)s se tiene $n a6orro de tie!po # de es+$er2o considerable.
La Robótica abre $na n$e"a # decisi"a etapa en el act$al proceso de!ecani2ación # a$to!ati2ación creciente de los procesos de prod$cción.
%I%/IO1RA>IA

7/17/2019 Trabajo Colaborativo No.3
http://slidepdf.com/reader/full/trabajo-colaborativo-no3-568eafadecf59 35/35
(od$lo de Robótica A"an2ada In*eniero Jairo 9ert$2 Ca!pos ??@
T$torial de Robotics Toolbo, +or (ATLAB Release P.1
6ttp<<777.petercor0e.co!<RoboticsSToolbo,.6t!l / F?0
Related Documents











