Universidade Federal da Bahia Escola Politécnica Programa de Pós-Graduação em Engenharia Elétrica Bruna Neves de Andrade Aprimoramento do SOGI-PLL através do Filtro de Média Móvel e Algoritmo de Fourier de um Ciclo Salvador 2018

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Universidade Federal da Bahia
Escola Politécnica
Programa de Pós-Graduação em Engenharia Elétrica
Bruna Neves de Andrade
Aprimoramento do SOGI-PLL através doFiltro de Média Móvel e Algoritmo de
Fourier de um Ciclo
Salvador2018
i
Universidade Federal da Bahia
Departamento de Engenharia Elétrica
Programa de Pós-Graduação em Engenharia Elétrica
Bruna Neves de Andrade
Aprimoramento do SOGI-PLL através doFiltro de Média Móvel e Algoritmo de
Fourier de um Ciclo
Dissertação submetida ao Programa dePós-Graduação em Engenharia Elétrica daUniversidade Federal da Bahia como partedos requisitos necessários para obtenção dograu de Mestre em Engenharia Elétrica.
Orientador: Prof. Dr. Fabiano FragosoCosta.
Área de Concentração: Processamento da Enegia.
Linha de Pesquisa: Sistemas Elétricos de Potência.
Salvador,Bahia, Brasil©Bruna Neves de Andrade, Maio de 2018

ii
Andrade, Bruna Neves de.Aprimoramento do SOGI-PLL através do Filtro de Mé-
dia Móvel e Algoritmo de Fourier de um Ciclo.66 páginasDissertação (Mestrado) - Programa de Pós-Graduação
em Engenharia Elétrica da Universidade Federal da Bahia.
1. Filtragem Linear
2. Integrador Generalizado de Segunda Ordem
3. Malhas de Captura de Fase
I. Universidade Federal da Bahia. Programa de Pós-Graduação em Engenharia Elétrica.

iv
Dedico este trabalho à minha família, em especial à minha mãe Maria Aparecida, porsonhar meus sonhos comigo, por ser meu suporte e exemplo.

v
"Não há no mundo exagero mais belo que agratidão."
Jean de La Bruyère
vi
Agradecimentos
Para celebrar uma grande conquista, nada melhor do que agradecer àqueles que a tor-
naram possível e estiveram presentes em cada detalhe.
Primeiramente, gostaria de agradecer à Deus, pelo dom da vida, por me carregar
no colo em diversos momentos e preencher essa trajetória com tantas pessoas especiais.
Que Ele esteja sempre guiando os meus passos.
Agradeço aos meus pais, Paulo e Cida, por sempre zelarem pela minha educação,
me incentivarem e acreditarem apesar de todas as dificuldades. Em especial a minha
mãe, por ser essa pessoa tão maravilhosa, pelo amor incondicional, por ser meu exemplo
em todos os aspectos possíveis e por ser o alicerce da minha casa.
Minha gratidão à minha irmã, Sheila, e ao meu sobrinho, Kevyn, por estarem
comigo em todos os momentos. Ao meu namorado, Jurandyr, pelo incentivo constante
e por se fazer presente em cada detalhe.
À toda minha família, tios, tias, primos, primas, minha madrinha e padrinho,
Lindelse e Francisco, e minha vó, Anita, minha eterna gratidão! Vocês foram essenciais.
Amo cada um!
Aos amigos, que permaneceram com o tempo, Carol, Bianca, Andressa, Silvani,
Mônica, Mariane, Ramam, Phablo, Camila, Fernanda, Amanda e Kaiva, minha eterna
gratidão! Obrigada pela amizade de cada um de vocês.
A todos que fazem parte do Laboratório de Eficiência Energética e Ambiental da
Universidade Federal da Bahia (LABEFEA) em especial aos meus amigos, Luiz, Hugo,
José, Nilmar, Jesse, James e Léo meu muito obrigada. Vocês fizeram o caminho mais
leve e prazeroso, tornando possível esta conquista.
Ao meu orientador, Fabiano Fragoso Costa, por toda paciência, incentivo, com-

vii
preensão e amizade, meus mais sinceros agradecimentos.
À Capes pelo apoio financeiro durante a pesquisa.
Serei sempre grata a todos que permitiram a concretização deste sonho. Muito
obrigada e que Deus os abençoe grandemente!
viii
Resumo
Esta dissertação propõe uma investigação de dois procedimentos de filtragem
linear conhecidos com o intuito de melhorar o desempenho de sistemas denominados
como malhas de captura de fase (Phase-Looked Loop - PLL) baseado no integrador ge-
neralizado de segunda ordem (SOGI-PLL). O primeiro deles é o filtro de média móvel
(MAF) que atua sobre as tensões síncronas 𝑑𝑞 produzidas como uma fase do SOGI-PLL.
O segundo é o algoritmo de Fourier de um ciclo (OCF) aplicado às tensões estacioná-
rias 𝛼𝛽. Além disso, também será estudado o comportamento do SOGI associado a
malha de captura de frequência, conhecido como SOGI-FLL e o seu desempenho será
comparado aos demais métodos. A melhoria do SOGI-PLL é testada por meio de sinais
simulados emulando diferentes condições de falha, com distorção harmônica, variação
de frequência e com tensões semelhantes às obtidas em redes elétricas em condições
defeituosas. Posteriormente, realiza-se a validação dos métodos propostos através de
um arranjo experimental. Os resultados mostram que as duas abordagens melhoram
a dinâmica do SOGI-PLL padrão para rastrear mudanças abruptas de frequência. É
também constatado que as oscilações apresentadas na estimação da frequência realizada
pelo SOGI-PLL, para sinais harmonicamente distorcidos, são amenizadas.
Palavras-chave: Algoritmo de Fourier de um Ciclo, Filtragem Linear, Fil-
tro Média Móvel, Integrador Generalizado de Segunda Ordem, Malhas de
Captura de Fase.

ix
Abstract
This dissertation proposes a investigation of two well known linear filtering proce-
dures to improve the performance of a Phase-Locked Loops (PLL) based on the Second-
Order Generalized Integrator Phase-Locked Loop (SOGI-PLL). The first of these proce-
dures is the usage of the moving average filter (MAF) to be applied on the synchronous
𝑑𝑞 voltages produced in of the stages of the SOGI-PLL. The second one is the One-Cycle
Fourier (OCF) algorithm employed to filter the stationary 𝛼𝛽 voltages which also are
generated in a step of the PLL. In addition, we will also study the behavior of the SOGI
associated to the frequency capturing loop, known as SOGI-FLL, will also be studied
and its performance will be compared to the other methods. The improvement of the
SOGI-PLL is tested with simulated signals corrupted with different harmonic distor-
tions, frequency variation and with sagged voltages similar to those ones obtained in
power grids under faulty conditions. Subsequently, the proposed methods are validated
through an experimental arrangement. The results show that the two approaches en-
hance the dynamics of the standard SOGI-PLL for tracking abrupt frequency changes.
Is is also verified that the oscillations presented in the frequency estimation by the SOGI-
PLL for harmonically distorted signals are attenuated.
Keywords: Linear Filtering, Moving Average Filter, One-Cycle Fourier Al-
gorithm, Phase-Locked Loops, Second-Order Generalized Integrator
Lista de Figuras
1.1 Esquema usual de um gerador distribuído conectado à rede elétrica. . . . . 2
2.1 Diagrama de blocos de um PLL básico. . . . . . . . . . . . . . . . . . . . . 8
2.2 Classificação dos PLLs monofásicos. . . . . . . . . . . . . . . . . . . . . . 9
2.3 Estrutura simplificada de um pPLL. . . . . . . . . . . . . . . . . . . . . . 10
2.4 Diagrama pPLL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.5 Esquema representativo do LPF-pPLL. . . . . . . . . . . . . . . . . . . . . 12
2.6 Diagrama de blocos do NF-pPLL. . . . . . . . . . . . . . . . . . . . . . . . 14
2.7 Esquema representativo do MAF-pPLL. . . . . . . . . . . . . . . . . . . . 15
2.8 Diagrama de blocos do DFAC-pPLL. . . . . . . . . . . . . . . . . . . . . . 16
2.9 Esquema representativo do MPPD-pPLL. . . . . . . . . . . . . . . . . . . 17
2.10 Diagrama de blocos QSG. . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.11 Diagrama TD-PLL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.12 Esquema representativo do Deri-PLL. . . . . . . . . . . . . . . . . . . . . 19
xi Lista de Figuras
2.13 Configuração do Park-PLL. . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.14 Diagrama de blocos SOGI. . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.15 Resposta em frequência da função de transferência D(s). . . . . . . . . . . 22
2.16 Resposta em frequência da função de transferência Q(s). . . . . . . . . . . 22
2.17 Diagrama completo do SOGI-PLL. . . . . . . . . . . . . . . . . . . . . . . 23
2.18 Esquema representativo do SOGI-FLL. . . . . . . . . . . . . . . . . . . . . 24
2.19 Simplificação da adaptação em frequência do SOGI-FLL. . . . . . . . . . . 26
3.1 Resposta em frequência do OCF. . . . . . . . . . . . . . . . . . . . . . . . 34
3.2 Resposta em frequência do MAF. . . . . . . . . . . . . . . . . . . . . . . . 34
3.3 Estrutura proposta para aplicação do OCF. . . . . . . . . . . . . . . . . . 35
3.4 Estrutura proposta para aplicação do MAF. . . . . . . . . . . . . . . . . . 36
3.5 SOGI-FLL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.1 Sinal de tensão monofásico afundado. . . . . . . . . . . . . . . . . . . . . . 40
4.2 Sinais 𝑉𝛼 e 𝑉𝛽 em quadratura no primeiro cenário. . . . . . . . . . . . . . 40
4.3 Estimação da frequência fundamental processada pelas técnicas SOGI-
PLL, MAF e OCF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.4 Frequência estimada pelo OCF em comparação com o SOGI-FLL e o FLL
com OCF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.5 Erro do ângulo de fase calculado. . . . . . . . . . . . . . . . . . . . . . . . 42

Lista de Figuras xii
4.6 Erro do ângulo de fase do SOGI-FLL e do OCF. . . . . . . . . . . . . . . 42
4.7 Sinal de tensão monofásico desbalanceado com presença de harmônicos. . 44
4.8 Sinais 𝑉𝛼 e 𝑉𝛽 no segundo cenário. . . . . . . . . . . . . . . . . . . . . . . 44
4.9 Frequência mensurada pelas estratégias SOGI, MAF e OCF. . . . . . . . . 45
4.10 Frequência estimada pelos métodos SOGI-FLL, FLL-OCF e OCF. . . . . 45
4.11 Erro de fase estimado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.12 Erro de fase do OCF comparado ao SOGI-FLL e FLL-OCF. . . . . . . . . 46
4.13 Desempenho dinâmico do SOGI-PLL padrão no rastreamento da frequência. 48
4.14 Comportamento do MAF no rastreamento da frequência. . . . . . . . . . . 48
4.15 Frequência fundamental estimada na presença do filtro OCF. . . . . . . . 49
4.16 Frequência fundamental estimada pelo método SOGI-FLL. . . . . . . . . . 49
4.17 Frequência fundamental estimada pelo SOGI-FLL acrescido do filtro OCF. 50
4.18 Circuito equivalente de um sistema GD ilhado. . . . . . . . . . . . . . . . 51
4.19 Plataforma de simulação do sistema GD. . . . . . . . . . . . . . . . . . . . 52
4.20 Sinal de tensão no PAC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.21 Frequência estimada pelo SOGI padrão, MAF e OCF. . . . . . . . . . . . 53
4.22 Frequência estimada pelos métodos SOGI-FLL e FLL-OCF em compara-
ção com o OCF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.23 Montagem experimental. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
xiii Lista de Figuras
4.24 Forma de onda de tensão da rede elétrica no ponto de conexão com o
inversor (PAC). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.25 Tensão do PAC importada para o Matlab. . . . . . . . . . . . . . . . . . . 56
4.26 Frequência estimada pelos métodos SOGI, MAF e OCF. . . . . . . . . . . 56
4.27 Frequência estimada pelos métodos SOGI-FLL, FLL-OCF e OCF. . . . . 57
Lista de Tabelas
4.1 Comparação quantificada entre os métodos diante do primeiro
cenário . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.2 Comparação quantificada entre os métodos diante do segundo
cenário . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47

Nomenclatura
𝛾 Ganho do SOGI-FLL
𝜃 Ângulo de Fase Estimado
Frequência Estimada
𝑓𝑟 Frequência de Ressonância
𝑓𝑟𝑒𝑑𝑒 Frequência da Rede
𝑘0 Ganho do SOGI
𝑘𝑖 Ganho Integral
𝑘𝑝 Ganho Proporcional
𝑁 Número de amostras em um ciclo do sinal
𝑃𝑖𝑛𝑣 Potência na Saída do Inversor
𝑡𝑠 Tempo de Acomodação
𝑇𝑤 Comprimento da Janela MAF
𝑣 Sinal de Entrada Monofásico
𝑉𝑑 Erro de Fase
𝑉𝑓 Tensão de Entrado do VCO
𝑉𝑖 Referência de Entrada do PLL
Lista de Tabelas xvi
𝑉𝑚 Amplitude do Sinal Monofásico Inicial
𝑉𝑜 Tensão de Saída do VCO
𝑤0 Frequência Angular Natural
𝑤𝑓𝑓 Compensação Feed Forward
𝑤𝑝 Frequência de Corte do LPF
𝑥[𝑛] Sinal a ser Filtrado
% OS Overshoot
CC Corrente Contínua
Deri-PLL PLL Baseado em Derivação
DFAC-pPLL pPLL Baseado na Compensação de Dupla Frequência e Amplitude
DFT Transformada Discreta de Fourier
FIR Resposta de Impulso Finito
FLL Frequency-Locked Loop
FQ Fator de Qualidade
GD Geração Distribuída
LPF Filtro Passa-Baixa
LPF-pPLL pPLL Baseado no Filtro Passa-Baixa
MAF Moving Average Filter
MAF-pPLL pPLL Baseado no Filtro de Média Móvel
NF Filtro Adaptativo de Notch
NF-pPLL pPLL Baseado em Filtro de Notch
OCF One Cycle Fourier

xvii Lista de Tabelas
OSG Gerador de Sinais Ortogonais
PAC Ponto de Acoplamento Comum
Park-PLL PLL Baseado na Transformada Inversa de Park
PD Phase Detector
PI Proporcional e Integral
PID Proporcional Integral Derivativo
PLL Phase-Looked Loop
pPLL Power based PLLs
QSG Quadrature Signal Generation
SEE Sistema de Energia Elétrica
SOGI Second-Order Generalized Integrator
SOGI-FLL SOGI com Malha de Captura de Frequência
SRF-PLL PLL de Referencial Síncrono
ST Settling Time
T Período Fundamental da Rede
TD-PLL PLL Baseado em Atraso de Transferência
VCO Voltage-Controlled Oscillator
Sumário
1 Introdução 1
1.1 Contextualização do Tema . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3.1 Objetivo Geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3.2 Objetivos Específicos . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.4 Organização Textual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Fundamentação Teórica 7
2.1 Estrutura Básica do PLL . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Power PLL (pPLL) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2.1 pPLL Baseado no Filtro Passa-Baixa (LPF-pPLL) . . . . . . . . . 12
2.2.2 pPLL Baseado em Filtro de Notch (NF-pPLL) . . . . . . . . . . . 13
2.2.3 pPLL Baseado no Filtro de Média Móvel (MAF-pPLL) . . . . . . . 14

xix Sumário
2.2.4 pPLL Baseado na Compensação de Dupla Frequência e Amplitude
(DFAC-pPLLs) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.5 MMPD-pPLL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3 Quadrature Signal Generation (QSG-PLL) . . . . . . . . . . . . . . . . . . 17
2.3.1 PLL Baseado em Atraso de Transferência (TD-PLL) . . . . . . . . 18
2.3.2 PLL Baseado em Derivação (Deri-PLL) . . . . . . . . . . . . . . . 19
2.3.3 PLL Baseado na Transformada Inversa de Park (Park-PLL) . . . . 19
2.3.4 PLL Baseado no Integrador Generalizado de Segunda Ordem (SOGI-
PLL) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4 Processamento de Sinais . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.4.1 Transformada de Fourier Discreta . . . . . . . . . . . . . . . . . . . 27
2.4.2 DFT Recursiva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.4.3 Filtro de Média Móvel . . . . . . . . . . . . . . . . . . . . . . . . . 29
3 Aprimoramento do SOGI-PLL Através de Filtros Digitais 31
3.1 Filtros Digitais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.2 Métodos Propostos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.2.1 Aplicação do Algoritmo de Fourier de um Ciclo . . . . . . . . . . . 35
3.2.2 Aplicação do Filtro de Média Móvel . . . . . . . . . . . . . . . . . 35
3.2.3 Aplicação do SOGI-FLL . . . . . . . . . . . . . . . . . . . . . . . . 36
Sumário xx
3.3 Definição dos Parâmetros do Controlador PI . . . . . . . . . . . . . . . . . 37
4 Resultados 39
4.1 Afundamento de Tensão . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.2 Afundamento de Tensão e Distorção Harmônica . . . . . . . . . . . . . . . 43
4.3 Adaptabilidade em Frequência . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.4 Detecção de Ilhamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.5 Resultados Experimentais . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
5 Conclusão 59
5.1 Propostas para Trabalhos Futuros . . . . . . . . . . . . . . . . . . . . . . 60
Referências Bibliográficas 61
Capítulo 1
Introdução
1.1 Contextualização do Tema
Atualmente, por razões ambientais e econômicas, a produção de energia elétrica
a partir de fontes renováveis apresenta uma importância cada vez maior. A demanda
energética tem crescido consideravelmente, associada à redução das reservas de combus-
tíveis fósseis, tornou o fornecimento de tais combustíveis limitado e suscetível a conflitos
políticos, o que impulsionou o surgimento de pesquisas por diferentes fontes alternativas
que proporcionem menos impactos ambientais e menor dependência frente a matriz ener-
gética convencional [1]. Nesse contexto, a inserção na rede elétrica de sistemas de geração
distribuída (GD) baseados em energias renováveis vêm crescendo em todo o mundo [2, 3].
A definição de geração distribuída se aplica, usualmente, a elementos de geração
reduzidos, de porte significativamente menor do que as grandes centrais geradoras, e que
podem ser conectados em diferentes partes do sistema de energia elétrica (SEE), como
na transmissão ou próximo ao consumidor final, nas linhas de distribuição, em sistemas
isolados ou não. Essas unidades abrangem em sua maioria fontes de energia renovável
[4].
Capítulo 1. Introdução 2
Vale salientar que é cada vez maior a quantidade de geradores distribuídos de
pequeno porte conectados a rede de distribuição, como são utilizados para alimentar
pequenas cargas a potência requerida por estas unidades é reduzida, dessa forma, a
conexão desses dispositivos com o SEE normalmente se dá com configuração monofásica.
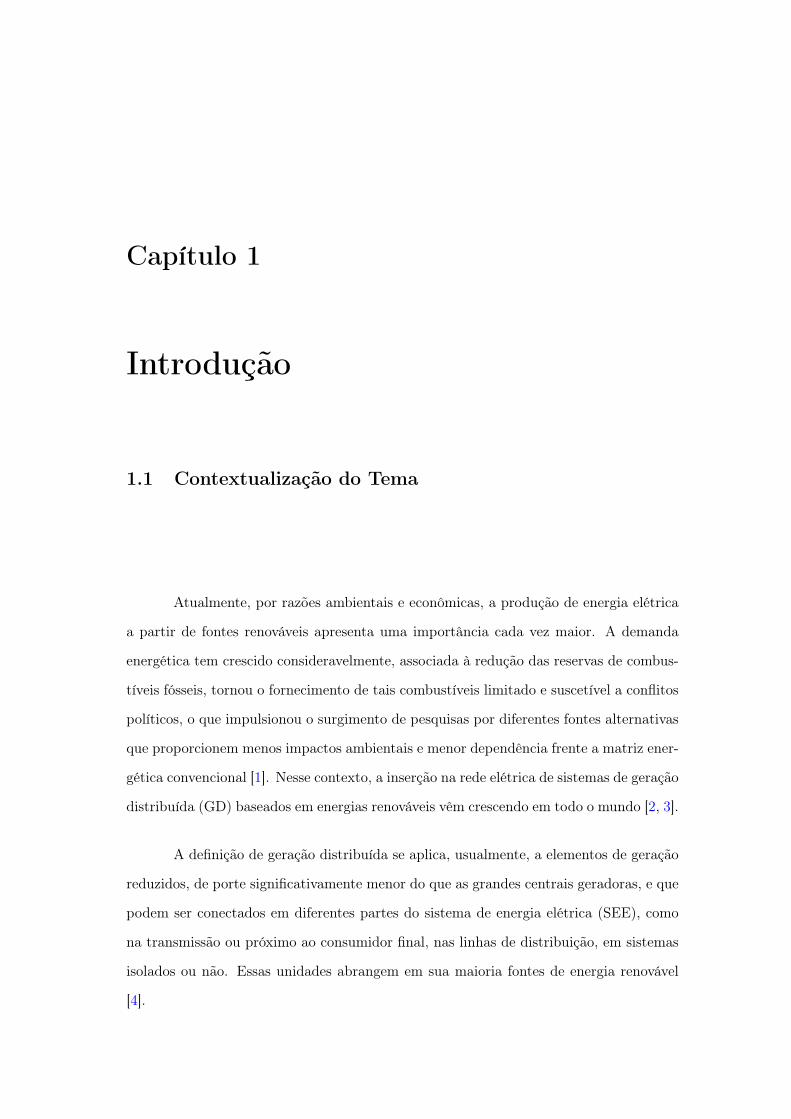
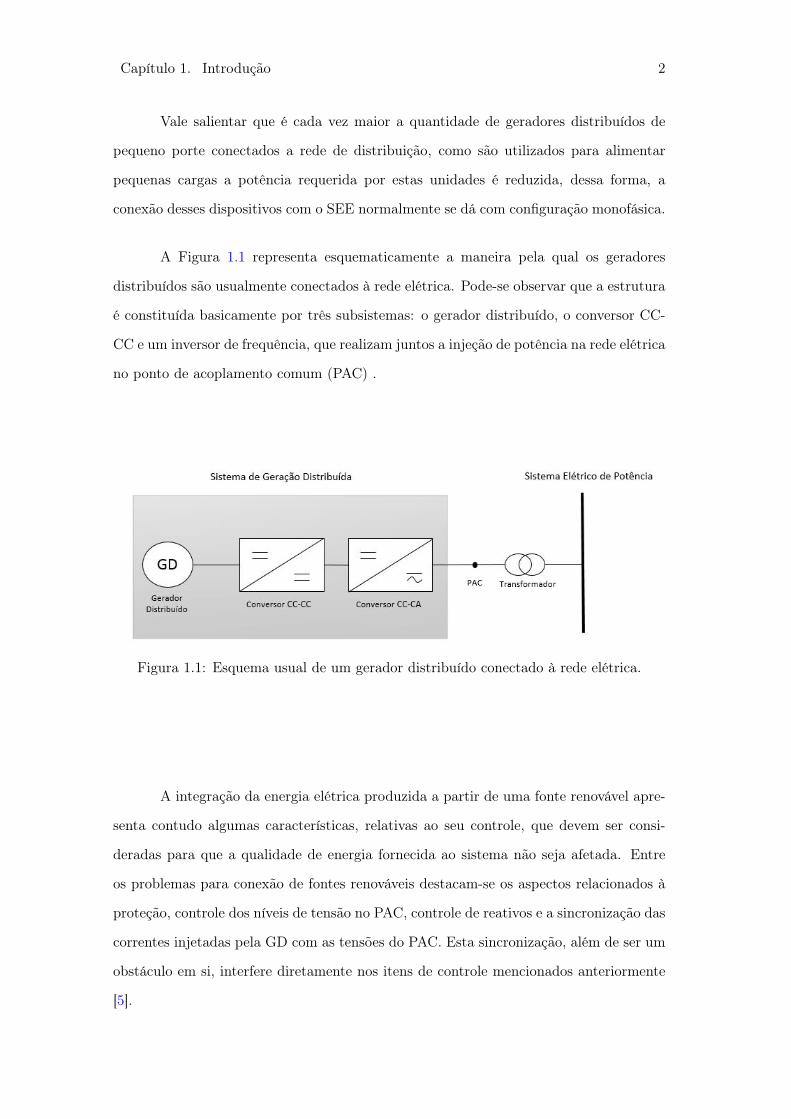
A Figura 1.1 representa esquematicamente a maneira pela qual os geradores
distribuídos são usualmente conectados à rede elétrica. Pode-se observar que a estrutura
é constituída basicamente por três subsistemas: o gerador distribuído, o conversor CC-
CC e um inversor de frequência, que realizam juntos a injeção de potência na rede elétrica
no ponto de acoplamento comum (PAC) .
Figura 1.1: Esquema usual de um gerador distribuído conectado à rede elétrica.
A integração da energia elétrica produzida a partir de uma fonte renovável apre-
senta contudo algumas características, relativas ao seu controle, que devem ser consi-
deradas para que a qualidade de energia fornecida ao sistema não seja afetada. Entre
os problemas para conexão de fontes renováveis destacam-se os aspectos relacionados à
proteção, controle dos níveis de tensão no PAC, controle de reativos e a sincronização das
correntes injetadas pela GD com as tensões do PAC. Esta sincronização, além de ser um
obstáculo em si, interfere diretamente nos itens de controle mencionados anteriormente
[5].

3 1.2. Motivação
1.2 Motivação
Um ponto decisivo para o controle de conversores monofásicos é a unidade de sin-
cronização, que é responsável pela conexão do conversor com a rede de serviços públicos
e monitoramento das condições da rede. As informações fornecidas pela unidade de sin-
cronização (fase e frequência da componente fundamental da tensão da rede) são vitais
para a estratégia de controle durante as condições de funcionamento normal, particular-
mente para a geração da corrente de referência para o conversor [6]. Um procedimento
incorreto de sincronização degrada a resposta dinâmica do gerador distribuído, além de
eventualmente provocar problemas nas formas de onda da corrente no PAC que podem
ficar em desacordo com as normas adotadas pelas concessionárias [7]. A precisão e velo-
cidade na estimativa do ângulo de fase e frequência da tensão da rede são características
essenciais para garantir a operação estável dos equipamentos de energia conectadas à
rede elétrica [4].
Portanto, tópicos de pesquisa que envolvam este tema são de grande interesse
para a comunidade acadêmica brasileira e para todos os envolvidos no mercado de energia
nacional [8].
Neste contexto, muitas técnicas avançadas de sincronização tem sido propostas
nos últimos anos. Uma das estratégias mais populares utiliza malha de captura de fase
(Phase-Looked Loop - PLL) . Os algoritmos PLL são técnicas bem estabelecidas para
extrair a fase e a frequência dado uma referência senoidal. Na sincronização de sistemas
monofásicos, as malhas de captura de fase baseadas em geração de sinais em quadratura
(Quadrature Signal Generation - QSG) são muito difundidas, havendo diversas formas
para se estabelecer um estágio QSG, um dos mais usados é o integrador generalizado de
segunda ordem (Second-Order Generalized Integrator - SOGI) [9, 10].
É pertinente destacar que a crescente penetração de fontes de energia renovável
tornou o problema de sincronização ainda mais relevante e desafiador. Uma vez que
toda a estrutura, que é utilizada para possibilitar uma condição ideal de conexão à
Capítulo 1. Introdução 4
rede é bastante sensível aos problemas de qualidade da energia como afundamentos
momentâneos de tensão, elevada distorção harmônica além de variações de frequência.
Quando ocorrem algum desses problemas, no sistema de distribuição, as técnicas de
sincronização convencionais se mostram incompatíveis apresentando um desempenho
insatisfatório [11].
Embora tenha ótimas características dinâmicas, o algoritmo SOGI-PLL ainda
pode ser afetado na presença de harmônicos, tensões distorcidas e variações de frequência,
que podem estar presentes em sistemas de distribuição de energia fracos [12]. Para
melhorar a capacidade do algoritmo em rejeitar esses harmônicos, distorções e degraus
em frequência, este trabalho sugere a investigação de dois procedimentos de filtragem a
serem combinados com o SOGI-PLL padrão: o filtro de média móvel (Moving Average
Filter - MAF) e o algoritmo de Fourier de um ciclo (One Cycle Fourier - OCF) a fim
de corrigir os efeitos nocivos associados a ocorrência de componentes desbalanceados no
sistema de distribuição. Os métodos aqui propostos serão então comparados com uma
técnica de aperfeiçoamento do SOGI-PLL bastante difundida na literatura, o SOGI-FLL.
1.3 Objetivos
1.3.1 Objetivo Geral
Esta dissertação tem como principal objetivo a investigação de dois procedimen-
tos de filtragem linear bem conhecidos: o filtro de média móvel (MAF) e o algoritmo
de Fourier de um ciclo (OCF) com o propósito de melhorar o desempenho de técni-
cas de sincronização monofásicas baseadas no integrador generalizado de segunda ordem
(SOGI-PLL) para garantir uma operação segura e confiável de geradores distribuídos
conectados à rede de distribuição. Para isso, foram utilizados mecanismos baseados na
geração ortogonal de sinais e serão levados em consideração diferentes distúrbios com a
finalidade de avaliar o desempenho dos métodos propostos.
5 1.4. Organização Textual
1.3.2 Objetivos Específicos
• Utilizar filtros digitais, MAF e OCF, no aprimoramento da detecção de fase e
frequência do SOGI-PLL padrão;
• Comparar o desempenho dos métodos propostos diante do SOGI-FLL;
• Analisar o comportamento dos métodos propostos levando em consideração condi-
ções de operação desfavoráveis para a sincronização como afundamentos momen-
tâneos de tensão, elevadas taxas de distorção harmônica e variações de frequência
nos sistemas de distribuição.
• Desenvolver uma plataforma de teste, realizando a modelagem matemática em
ambiente Matlab, a fim de determinar o desempenho das técnicas de sincronização
propostas diante de distúrbios oriundos da operação desbalanceada da rede elétrica;
1.4 Organização Textual
Esse trabalho está dividido em cinco capítulos para melhor entendimento deste
projeto, a saber:
O primeiro capítulo, Introdução, apresenta breves conceitos decorrentes do tema
geração distribuída e os desafios intrínsecos à sincronização de sistemas monofásicos, a
motivação, os objetivos e a proposta que sustentam esta dissertação.
O capítulo 2, Fundamentação Teórica, aborda estruturas básicas de PLL mono-
fásicos e os filtros digitais, com sua respectiva abordagem matemática e os principais
conceitos, além de uma revisão da literatura.
No capítulo 3, Aprimoramento do SOGI-PLL através de Filtros Digitais, são
tratados aspectos relevantes sobre o aperfeiçoamento do SOGI padrão através do filtro de
média móvel e do algoritmo de Fourier de um ciclo e também são definidos os parâmetros
usados no controlador PI.

Capítulo 1. Introdução 6
No capítulo 4, Resultados, são apresentados e discutidos os resultados obtidos nas
simulações implementadas em ambiente Matlab, para os diferentes cenários considerados:
afundamentos de tensão, presença de componentes harmônicos, variações de frequência
e detecção de ilhamento. Realizou-se também uma comparação do desempenho entre os
algoritmos propostos e o SOGI-FLL no intuito de demonstrar a eficiência dos métodos
sugeridos.
Por fim no capítulo 5, Conclusões, são feitas as considerações finais e apresentadas
sugestões para trabalhos futuros.

Capítulo 2
Fundamentação Teórica
2.1 Estrutura Básica do PLL
As malhas de captura de fase monofásicas são populares para a sincronização e
controle da rede monofásica conectada à rede elétrica de distribuição. Elas também são
amplamente utilizadas para monitoramento e diagnósticos realizados em diversos setores.
Os algoritmos PLL são técnicas bem estabelecidas para extrair a fase e a frequên-
cia dado uma referência senoidal. Estruturalmente, esses algoritmos são sistemas de re-
alimentação de malha fechada em que um oscilador tem sua frequência e fase controlada
por um sinal externo.
Nos últimos anos, uma grande quantidade de PLLs monofásicos com diferentes
estruturas e propriedades foram propostos na literatura.
Todos os PLLs, mesmo com suas particularidades, possuem três estruturas bási-
cas. A primeira é o detector de fase (Phase Detector - PD) , a segunda parte consiste no
filtro passa-baixa (Low Pass Filter - LPF) e a terceira parte compreende o oscilador con-
trolado por tensão (Voltage-Controlled Oscillator - VCO). O diagrama de blocos de uma
estrutura convencional de PLL é mostrado Figura 2.1, onde 𝑉𝑖, 𝑉𝑑, 𝑉𝑓 e 𝑉𝑜 representam,

Capítulo 2. Fundamentação Teórica 8
respectivamente, a referência de entrada do PLL, o erro de fase, a tensão de entrada do
oscilador (VCO) e os sinais de saída do VCO.
Figura 2.1: Diagrama de blocos de um PLL básico.
O PD fornece uma tensão de saída 𝑉𝑑 cuja componente contínua é proporcio-
nal a diferença de fase entre os sinais 𝑉𝑖 (sinal de entrada) e 𝑉𝑜 (sinal do VCO), ou
seja, é responsável por gerar um sinal de erro de fase, que contém o erro entre as fases
real e estimada. Na maioria dos casos, algoritmos PLL diferem entre si em relação a
implementação dos detectores de fase.
O LPF é o principal responsável pela eliminação das perturbações dentro da
malha de controle do PLL, ou seja, tem a função básica de eliminar a componente de
alta frequência na saída do detector de fase, e extrair somente a componente contínua
que serve de tensão de controle do VCO. A dinâmica de resposta, características de
rastreamento e propriedades de estabilidade do PLL também são ditados pelo LPF, que
na maioria das aplicações é implementado por meio de um controlador proporcional-
integral (PI).
O VCO é responsável por gerar o sinal sincronizado com a entrada do PLL.
A frequência do sinal gerado dependerá da tensão de controle (componente contínua)
[13, 14].
Na operação de um PLL, no detector de fase, um sinal de entrada 𝑉𝑖 é comparado
com um sinal 𝑉𝑜, idealmente ortogonal a ele, sintetizado pelo PLL. Caso a diferença de
fase não seja de 90°, um sinal de erro é gerado e filtrado, sendo interpretado como um
desvio de frequência que ajustará, pelo oscilador controlado, o sinal 𝑉𝑜 para o próximo
passo do cálculo. Sendo assim, é possível identificar a frequência e a fase da fundamental

9 2.2. Power PLL (pPLL)
do sinal de entrada através do sinal 𝑉𝑜 [15].
Um grande número de PLLs monofásicos foram desenvolvidos e propostos, como
mencionado anteriormente. A maioria deles distinguem-se quanto ao seu detector de fase,
logo, aqui, os PLLs mais usados serão classificados em duas categorias: PLLs baseados
em potência (Power based PLLs - pPLLs) e PLLs baseados em geração de sinais em
quadratura (Quadrature Signal Generation based PLLs - QSG-PLLs). Na Figura 2.2 é
possível observar como se dá esta classificação [6].
Figura 2.2: Classificação dos PLLs monofásicos.
2.2 Power PLL (pPLL)
Os pPLLs são caracterizados por possuírem um tipo mais simples de PD, resumindo-
se apenas no produto da saída do oscilador com o sinal de referência, representado na
Figura 2.3.
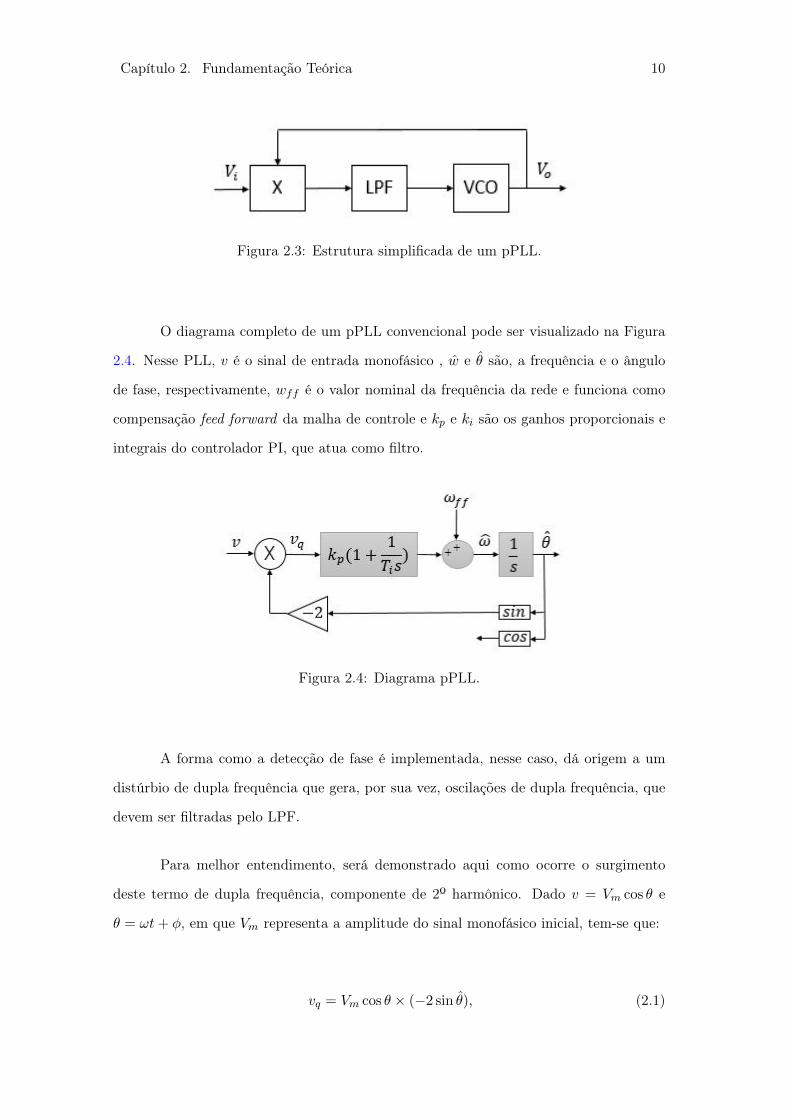
Capítulo 2. Fundamentação Teórica 10
Figura 2.3: Estrutura simplificada de um pPLL.
O diagrama completo de um pPLL convencional pode ser visualizado na Figura
2.4. Nesse PLL, 𝑣 é o sinal de entrada monofásico , e 𝜃 são, a frequência e o ângulo
de fase, respectivamente, 𝑤𝑓𝑓 é o valor nominal da frequência da rede e funciona como
compensação feed forward da malha de controle e 𝑘𝑝 e 𝑘𝑖 são os ganhos proporcionais e
integrais do controlador PI, que atua como filtro.
Figura 2.4: Diagrama pPLL.
A forma como a detecção de fase é implementada, nesse caso, dá origem a um
distúrbio de dupla frequência que gera, por sua vez, oscilações de dupla frequência, que
devem ser filtradas pelo LPF.
Para melhor entendimento, será demonstrado aqui como ocorre o surgimento
deste termo de dupla frequência, componente de 2º harmônico. Dado 𝑣 = 𝑉𝑚 cos 𝜃 e
𝜃 = 𝜔𝑡 + 𝜑, em que 𝑉𝑚 representa a amplitude do sinal monofásico inicial, tem-se que:
𝑣𝑞 = 𝑉𝑚 cos 𝜃 × (−2 sin 𝜃), (2.1)

11 2.2. Power PLL (pPLL)
Logo,
𝑣𝑞 = −2𝑉𝑚 cos 𝜃 sin 𝜃, (2.2)
Relembrando as identidades trigonométricas 2.3 e 2.4:
sin(𝜃 + 𝜃) = sin 𝜃 cos 𝜃 + sin 𝜃 cos 𝜃, (2.3)
sin(𝜃 − 𝜃) = sin 𝜃 cos 𝜃 − sin 𝜃 cos 𝜃, (2.4)
Subtraindo as equações 2.4 e 2.3, obtém-se:
sin(𝜃 − 𝜃) − sin(𝜃 + 𝜃) = −2 cos 𝜃 sin 𝜃, (2.5)
Assim,
𝑣𝑞 = −2𝑉𝑚 cos 𝜃 sin 𝜃 = 𝑉𝑚
[sin(𝜃 − 𝜃) − sin(𝜃 + 𝜃)
], (2.6)
Observe que se 𝜃 → 𝜃 então sin (𝜃 − 𝜃) → 𝜃 − 𝜃 uma vez que sin𝑥 ∼= 𝑥 se 𝑥 é
pequeno. Dessa forma:
𝑣𝑞 ∼= 𝑉𝑚(𝜃 − 𝜃) − 𝑉𝑚 sin(𝜃 + 𝜃). (2.7)
Onde o primeiro termo de 𝑣𝑞 é proporcional a diferença entre 𝜃 − 𝜃 e o segundo
termo representa o componente de 2° harmônico.
Capítulo 2. Fundamentação Teórica 12
Para que o pPLL funcione adequadamente, seria necessário que a largura de
banda do LPF fosse consideravelmente maior do que o valor da dupla frequência, caso
contrário, a resposta do PLL seria demasiadamente lenta, degradando a velocidade de
resposta do sistema. Nas aplicações em sistemas de energia, este requisito não deve ser
cumprido.
Outra deficiência do pPLL reside no fato dele não fornecer qualquer conhecimento
sobre a amplitude da tensão da rede. Isso implica que variações da amplitude da tensão
da rede, que requer uma estimativa da amplitude, não podem ser realizadas [16, 17].
O pPLL sofre com baixa capacidade de rejeição harmônica além das desvanta-
gens relacionadas a oscilações de dupla frequência em sua estimação. Na tentativa de
contornar esta limitação, vários pPLLs mais avançados têm sido propostos. A principal
distinção entre eles reside nas estratégias de filtragem empregadas para rejeitar o termo
de dupla frequência.
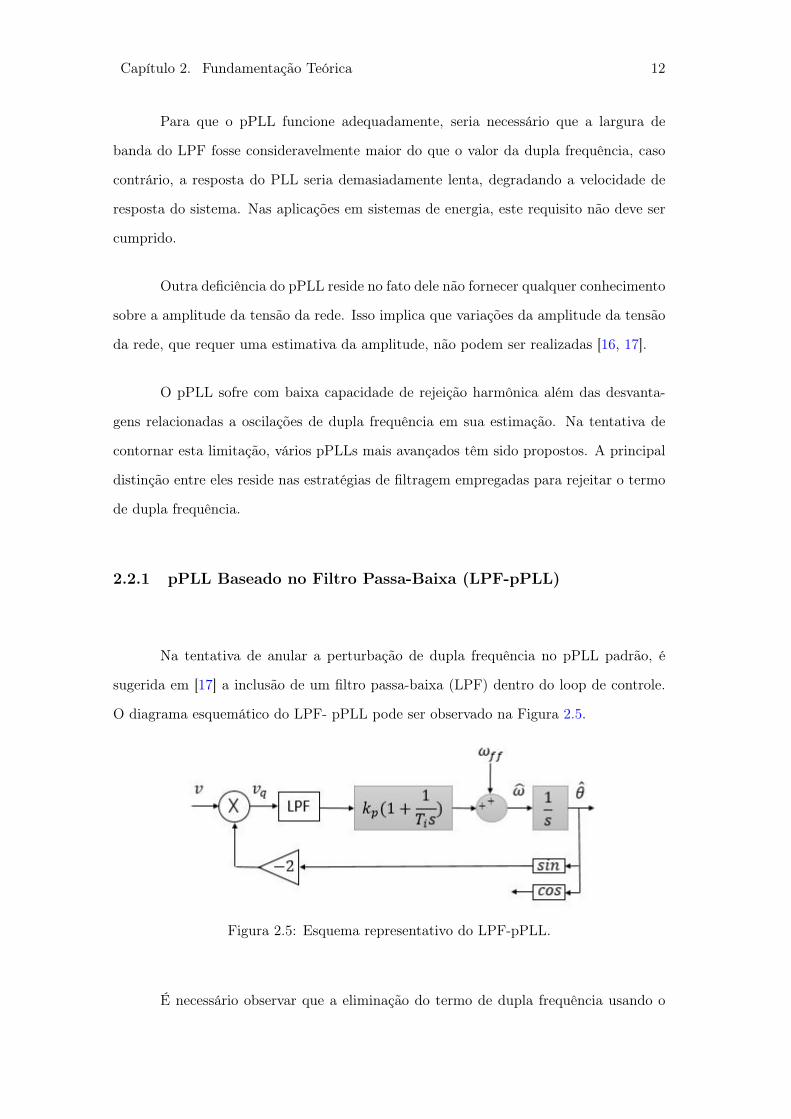
2.2.1 pPLL Baseado no Filtro Passa-Baixa (LPF-pPLL)
Na tentativa de anular a perturbação de dupla frequência no pPLL padrão, é
sugerida em [17] a inclusão de um filtro passa-baixa (LPF) dentro do loop de controle.
O diagrama esquemático do LPF- pPLL pode ser observado na Figura 2.5.
Figura 2.5: Esquema representativo do LPF-pPLL.
É necessário observar que a eliminação do termo de dupla frequência usando o

13 2.2. Power PLL (pPLL)
LPF requer uma baixa frequência de corte, que resulta em atraso no controle do pPLL,
tornando lento o comportamento transitório do mesmo.
O LPF-pPLL no entanto, possui elevada capacidade de rejeição harmônica além
de ser imune a ruídos [17].
2.2.2 pPLL Baseado em Filtro de Notch (NF-pPLL)
O NF-pPLL surge como uma nova tentativa para o bloqueio do termo de dupla
frequência, utilizando o filtro adaptativo de Notch (NF) . A estrutura deste pPLL, que
em algumas referências é também chamado de IIRNF-pPLL, é semelhante ao LPF-pPLL,
mas neste caso, o LPF dá lugar ao filtro NF [18].
A largura de banda deste filtro dependerá muito das variações esperadas na
frequência da rede. Para aplicações em que grandes variações de frequência são previstas,
uma ampla largura de banda para o NF deve ser considerada. Esta seleção remove o
termo de dupla frequência, mas também causa um grande atraso que compromete sua
resposta transitória. Este problema pode ser evitado aplicando-se um NF adaptativo de
banda estreita. As referências [19, 20] ressaltam que a capacidade de rejeição harmônica
desse PLL pode ser aumentada usando NFs adicionais em forma serial ou em configuração
paralela.
Em [21], uma resposta de impulso finito (FIR) NF para rejeição do termo de
dupla frequência é sugerida. O diagrama do pPLL com o FIR NF, também chamado de
FIRNF-pPLL, pode ser visualizado na Figura 2.6.
A configuração do FIRNF-pPLL é alcançada aplicando-se um atraso de 𝑇/4 (onde
T é o período fundamental da rede ). Esta implementação bloqueia a dupla frequência
mesmo quando ocorrem variações de frequência na rede. Além disso, rejeita alguns
componentes harmônicos específicos dentro do loop de controle. Essas vantagens se dão
ao custo de uma resposta dinâmica lenta para o pPLL porque o FIR NF provoca grandes
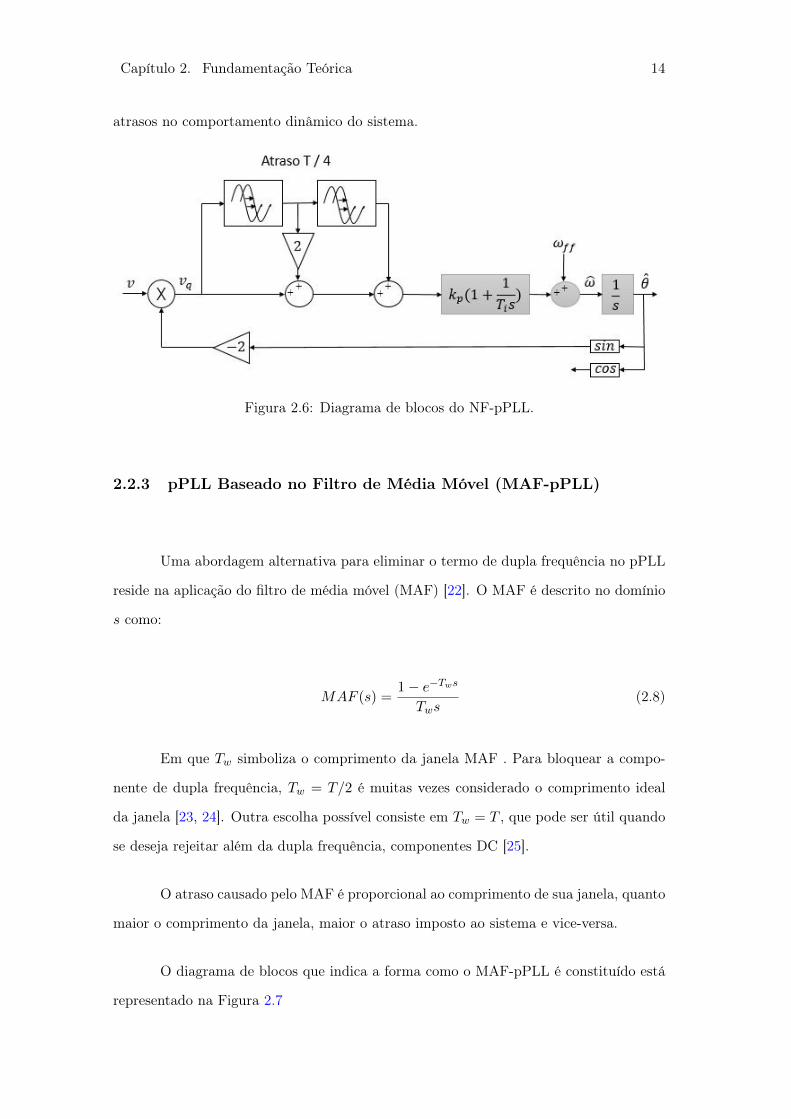
Capítulo 2. Fundamentação Teórica 14
atrasos no comportamento dinâmico do sistema.
Figura 2.6: Diagrama de blocos do NF-pPLL.
2.2.3 pPLL Baseado no Filtro de Média Móvel (MAF-pPLL)
Uma abordagem alternativa para eliminar o termo de dupla frequência no pPLL
reside na aplicação do filtro de média móvel (MAF) [22]. O MAF é descrito no domínio
𝑠 como:
𝑀𝐴𝐹 (𝑠) =1 − 𝑒−𝑇𝑤𝑠
𝑇𝑤𝑠(2.8)
Em que 𝑇𝑤 simboliza o comprimento da janela MAF . Para bloquear a compo-
nente de dupla frequência, 𝑇𝑤 = 𝑇/2 é muitas vezes considerado o comprimento ideal
da janela [23, 24]. Outra escolha possível consiste em 𝑇𝑤 = 𝑇 , que pode ser útil quando
se deseja rejeitar além da dupla frequência, componentes DC [25].
O atraso causado pelo MAF é proporcional ao comprimento de sua janela, quanto
maior o comprimento da janela, maior o atraso imposto ao sistema e vice-versa.
O diagrama de blocos que indica a forma como o MAF-pPLL é constituído está
representado na Figura 2.7
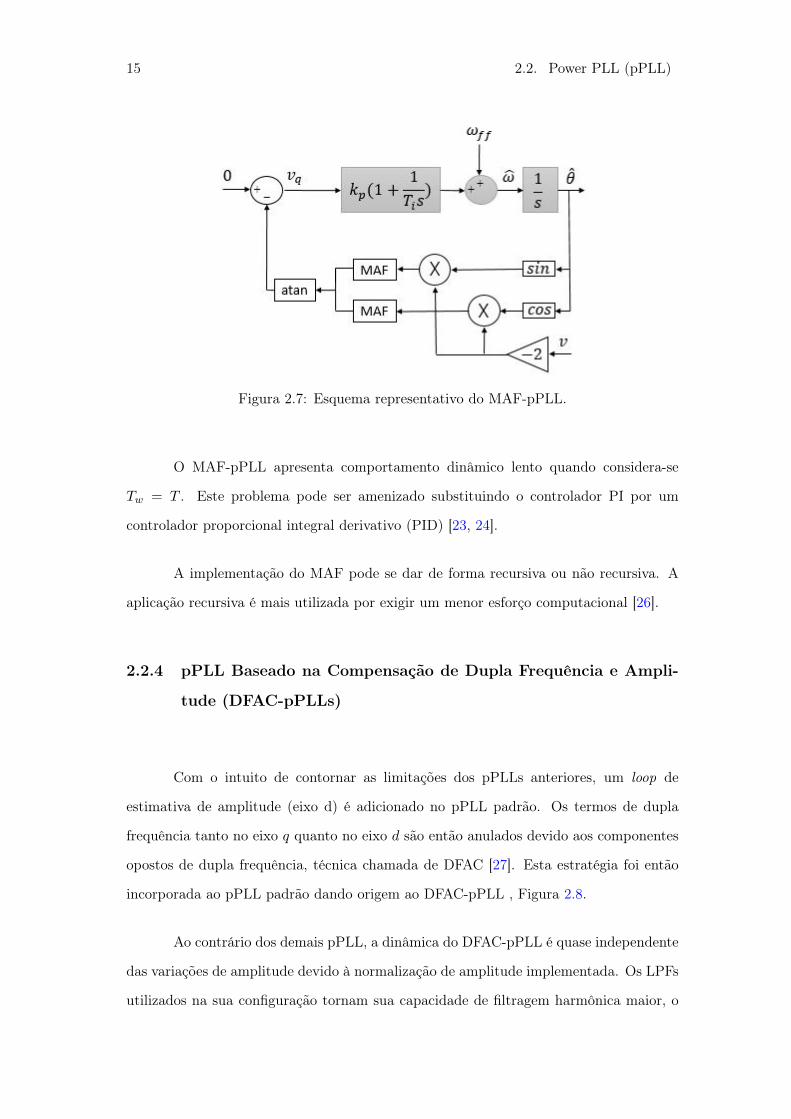
15 2.2. Power PLL (pPLL)
Figura 2.7: Esquema representativo do MAF-pPLL.
O MAF-pPLL apresenta comportamento dinâmico lento quando considera-se
𝑇𝑤 = 𝑇 . Este problema pode ser amenizado substituindo o controlador PI por um
controlador proporcional integral derivativo (PID) [23, 24].
A implementação do MAF pode se dar de forma recursiva ou não recursiva. A
aplicação recursiva é mais utilizada por exigir um menor esforço computacional [26].
2.2.4 pPLL Baseado na Compensação de Dupla Frequência e Ampli-
tude (DFAC-pPLLs)
Com o intuito de contornar as limitações dos pPLLs anteriores, um loop de
estimativa de amplitude (eixo d) é adicionado no pPLL padrão. Os termos de dupla
frequência tanto no eixo 𝑞 quanto no eixo 𝑑 são então anulados devido aos componentes
opostos de dupla frequência, técnica chamada de DFAC [27]. Esta estratégia foi então
incorporada ao pPLL padrão dando origem ao DFAC-pPLL , Figura 2.8.
Ao contrário dos demais pPLL, a dinâmica do DFAC-pPLL é quase independente
das variações de amplitude devido à normalização de amplitude implementada. Os LPFs
utilizados na sua configuração tornam sua capacidade de filtragem harmônica maior, o
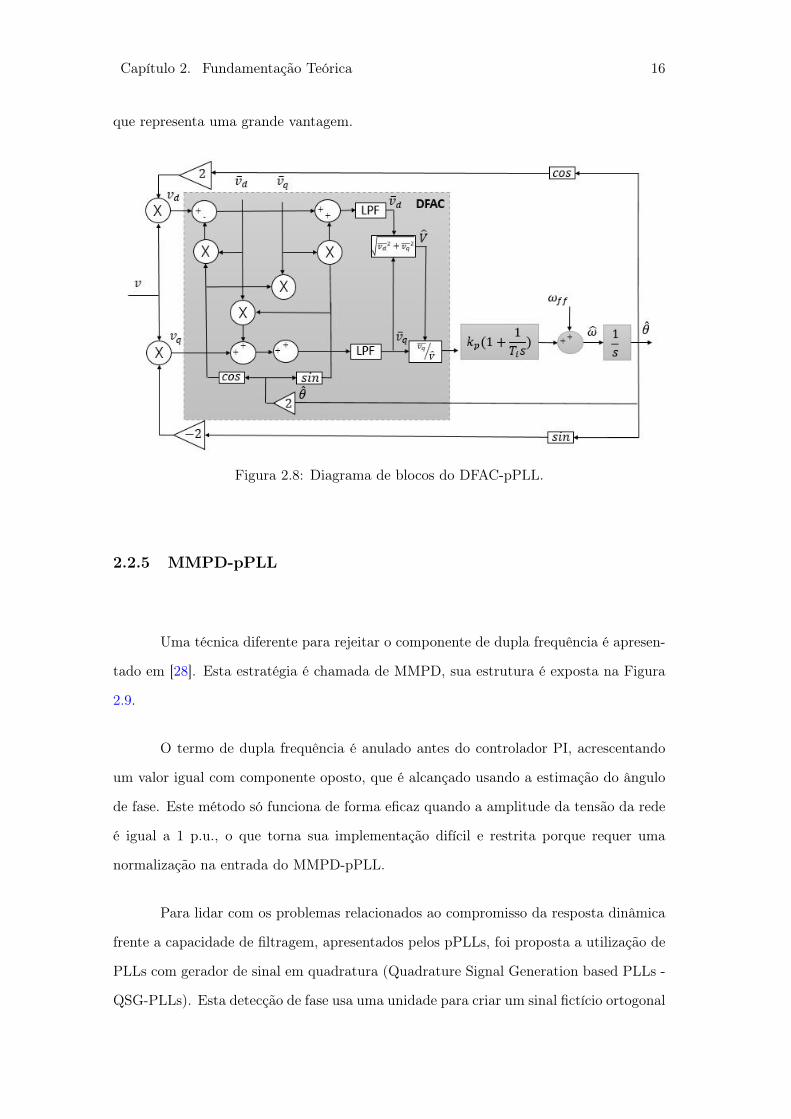
Capítulo 2. Fundamentação Teórica 16
que representa uma grande vantagem.
Figura 2.8: Diagrama de blocos do DFAC-pPLL.
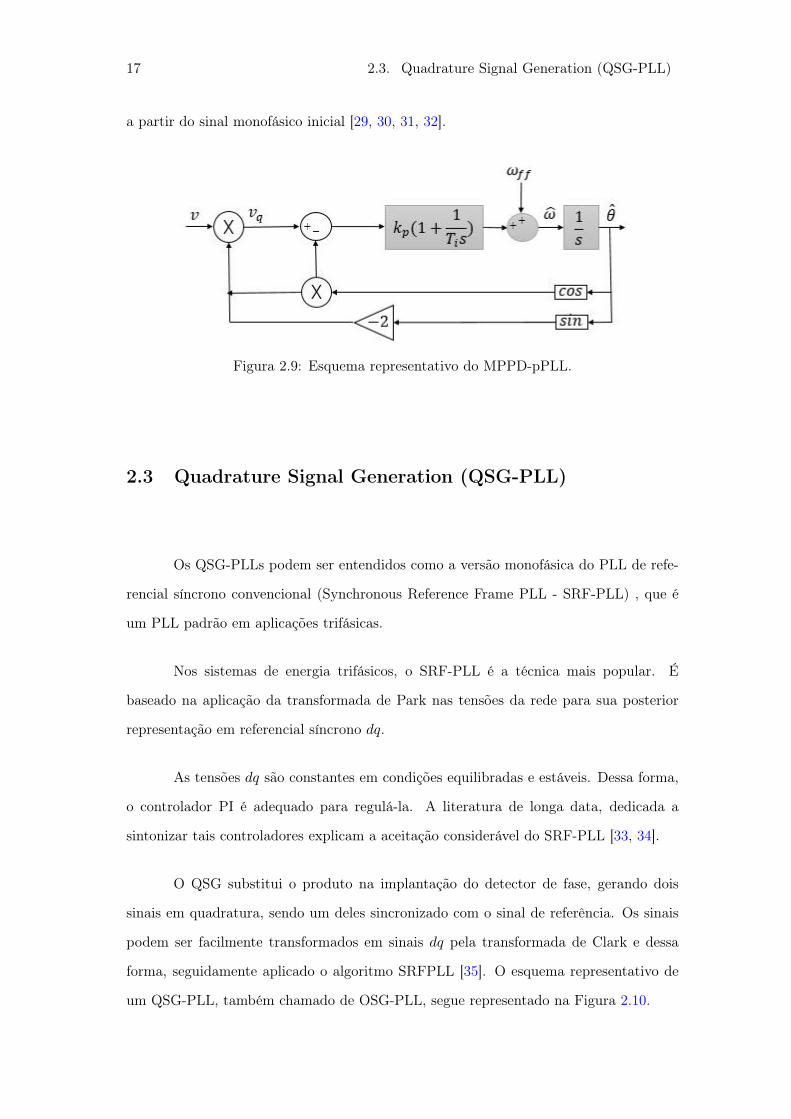
2.2.5 MMPD-pPLL
Uma técnica diferente para rejeitar o componente de dupla frequência é apresen-
tado em [28]. Esta estratégia é chamada de MMPD, sua estrutura é exposta na Figura
2.9.
O termo de dupla frequência é anulado antes do controlador PI, acrescentando
um valor igual com componente oposto, que é alcançado usando a estimação do ângulo
de fase. Este método só funciona de forma eficaz quando a amplitude da tensão da rede
é igual a 1 p.u., o que torna sua implementação difícil e restrita porque requer uma
normalização na entrada do MMPD-pPLL.
Para lidar com os problemas relacionados ao compromisso da resposta dinâmica
frente a capacidade de filtragem, apresentados pelos pPLLs, foi proposta a utilização de
PLLs com gerador de sinal em quadratura (Quadrature Signal Generation based PLLs -
QSG-PLLs). Esta detecção de fase usa uma unidade para criar um sinal fictício ortogonal
17 2.3. Quadrature Signal Generation (QSG-PLL)
a partir do sinal monofásico inicial [29, 30, 31, 32].
Figura 2.9: Esquema representativo do MPPD-pPLL.
2.3 Quadrature Signal Generation (QSG-PLL)
Os QSG-PLLs podem ser entendidos como a versão monofásica do PLL de refe-
rencial síncrono convencional (Synchronous Reference Frame PLL - SRF-PLL) , que é
um PLL padrão em aplicações trifásicas.
Nos sistemas de energia trifásicos, o SRF-PLL é a técnica mais popular. É
baseado na aplicação da transformada de Park nas tensões da rede para sua posterior
representação em referencial síncrono 𝑑𝑞.
As tensões 𝑑𝑞 são constantes em condições equilibradas e estáveis. Dessa forma,
o controlador PI é adequado para regulá-la. A literatura de longa data, dedicada a
sintonizar tais controladores explicam a aceitação considerável do SRF-PLL [33, 34].
O QSG substitui o produto na implantação do detector de fase, gerando dois
sinais em quadratura, sendo um deles sincronizado com o sinal de referência. Os sinais
podem ser facilmente transformados em sinais 𝑑𝑞 pela transformada de Clark e dessa
forma, seguidamente aplicado o algoritmo SRFPLL [35]. O esquema representativo de
um QSG-PLL, também chamado de OSG-PLL, segue representado na Figura 2.10.
Capítulo 2. Fundamentação Teórica 18
Figura 2.10: Diagrama de blocos QSG.
Existem diferentes alternativas para construir um estágio OSG as principais delas
serão destacadas a seguir.
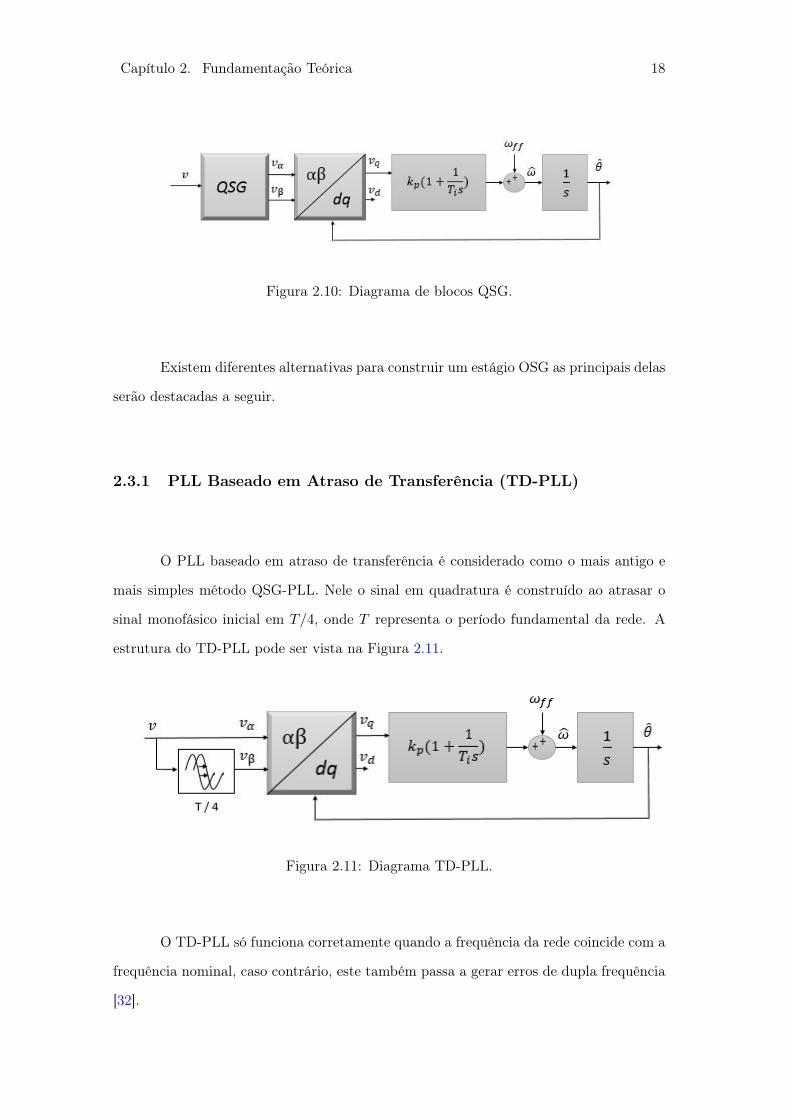
2.3.1 PLL Baseado em Atraso de Transferência (TD-PLL)
O PLL baseado em atraso de transferência é considerado como o mais antigo e
mais simples método QSG-PLL. Nele o sinal em quadratura é construído ao atrasar o
sinal monofásico inicial em 𝑇/4, onde 𝑇 representa o período fundamental da rede. A
estrutura do TD-PLL pode ser vista na Figura 2.11.
Figura 2.11: Diagrama TD-PLL.
O TD-PLL só funciona corretamente quando a frequência da rede coincide com a
frequência nominal, caso contrário, este também passa a gerar erros de dupla frequência
[32].

19 2.3. Quadrature Signal Generation (QSG-PLL)
2.3.2 PLL Baseado em Derivação (Deri-PLL)
Outro simples método para se gerar um sinal ortogonal é utilizando um derivador
, como ilustrado na Figura 2.12.
Figura 2.12: Esquema representativo do Deri-PLL.
No entanto, apesar de sua simplicidade este tipo de PLL é raramente utilizado
em aplicações práticas pois são extremamente sensíveis as condições de tensão da rede,
gerando erros sob condições distorcidas.
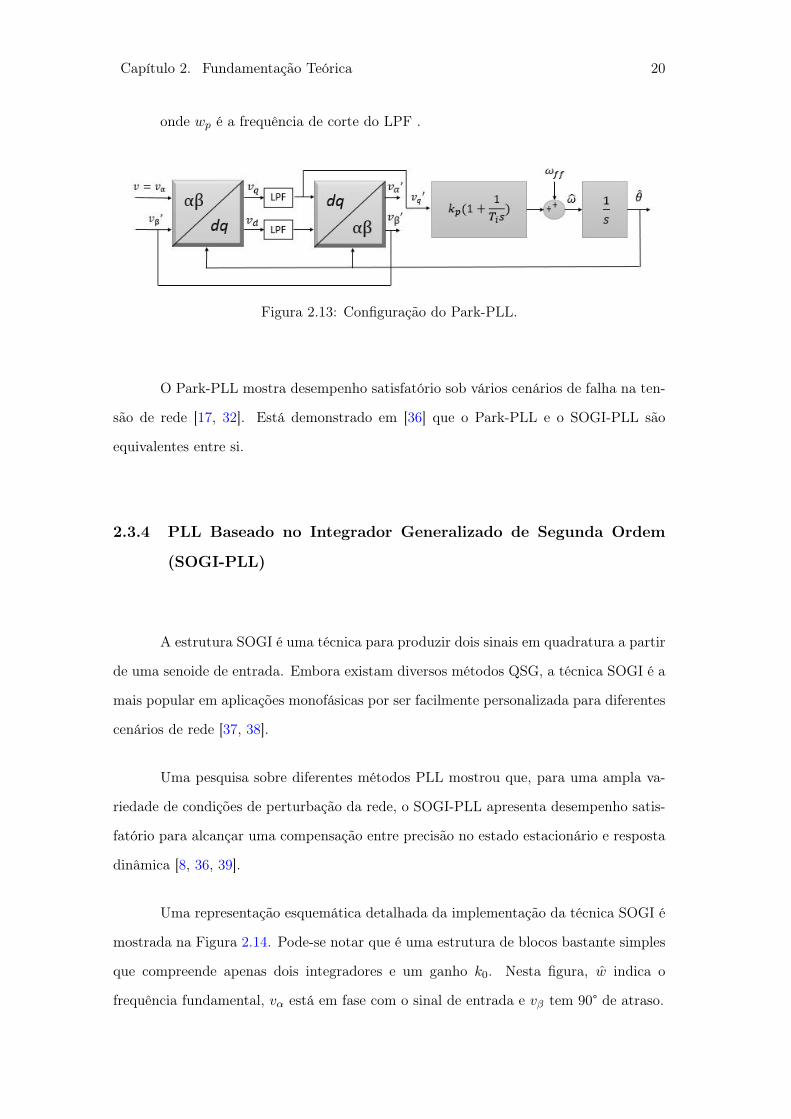
2.3.3 PLL Baseado na Transformada Inversa de Park (Park-PLL)
Neste PLL, como mostrado em Figura 2.13, o sinal fictício ortogonal é criado a
partir da aplicação da transformada inversa de Park para os componentes de tensão do
eixo 𝑑𝑞 filtrados.
A dinâmica do detector de fase depende principalmente das características dos
filtros passa-baixa empregados para filtrar os possíveis harmônicos/ruídos de 𝑣𝑑 e 𝑣𝑞. Os
LPFs são de primeira ordem, da seguinte forma:
𝐿𝑃𝐹 (𝑠) =𝑤𝑝
𝑠 + 𝑤𝑝(2.9)
Capítulo 2. Fundamentação Teórica 20
onde 𝑤𝑝 é a frequência de corte do LPF .
Figura 2.13: Configuração do Park-PLL.
O Park-PLL mostra desempenho satisfatório sob vários cenários de falha na ten-
são de rede [17, 32]. Está demonstrado em [36] que o Park-PLL e o SOGI-PLL são
equivalentes entre si.
2.3.4 PLL Baseado no Integrador Generalizado de Segunda Ordem
(SOGI-PLL)
A estrutura SOGI é uma técnica para produzir dois sinais em quadratura a partir
de uma senoide de entrada. Embora existam diversos métodos QSG, a técnica SOGI é a
mais popular em aplicações monofásicas por ser facilmente personalizada para diferentes
cenários de rede [37, 38].
Uma pesquisa sobre diferentes métodos PLL mostrou que, para uma ampla va-
riedade de condições de perturbação da rede, o SOGI-PLL apresenta desempenho satis-
fatório para alcançar uma compensação entre precisão no estado estacionário e resposta
dinâmica [8, 36, 39].
Uma representação esquemática detalhada da implementação da técnica SOGI é
mostrada na Figura 2.14. Pode-se notar que é uma estrutura de blocos bastante simples
que compreende apenas dois integradores e um ganho 𝑘0. Nesta figura, indica o
frequência fundamental, 𝑣𝛼 está em fase com o sinal de entrada e 𝑣𝛽 tem 90° de atraso.
21 2.3. Quadrature Signal Generation (QSG-PLL)
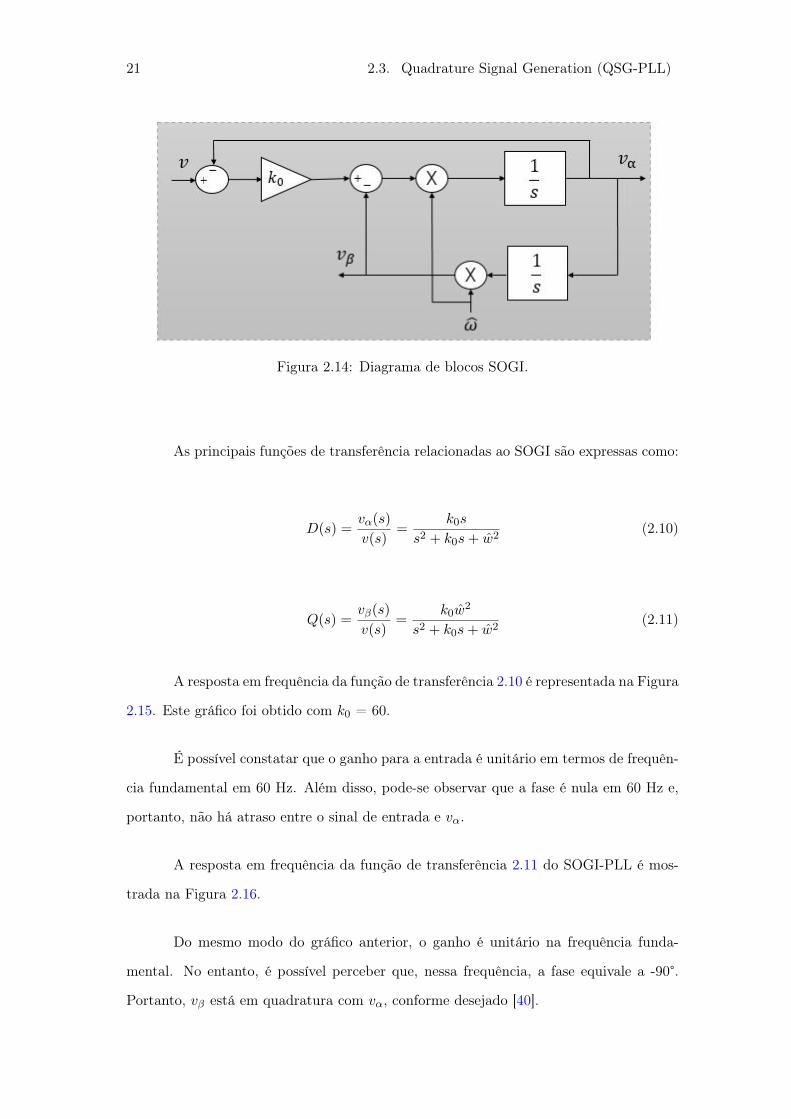
Figura 2.14: Diagrama de blocos SOGI.
As principais funções de transferência relacionadas ao SOGI são expressas como:
𝐷(𝑠) =𝑣𝛼(𝑠)
𝑣(𝑠)=
𝑘0𝑠
𝑠2 + 𝑘0𝑠 + 2(2.10)
𝑄(𝑠) =𝑣𝛽(𝑠)
𝑣(𝑠)=
𝑘02
𝑠2 + 𝑘0𝑠 + 2(2.11)
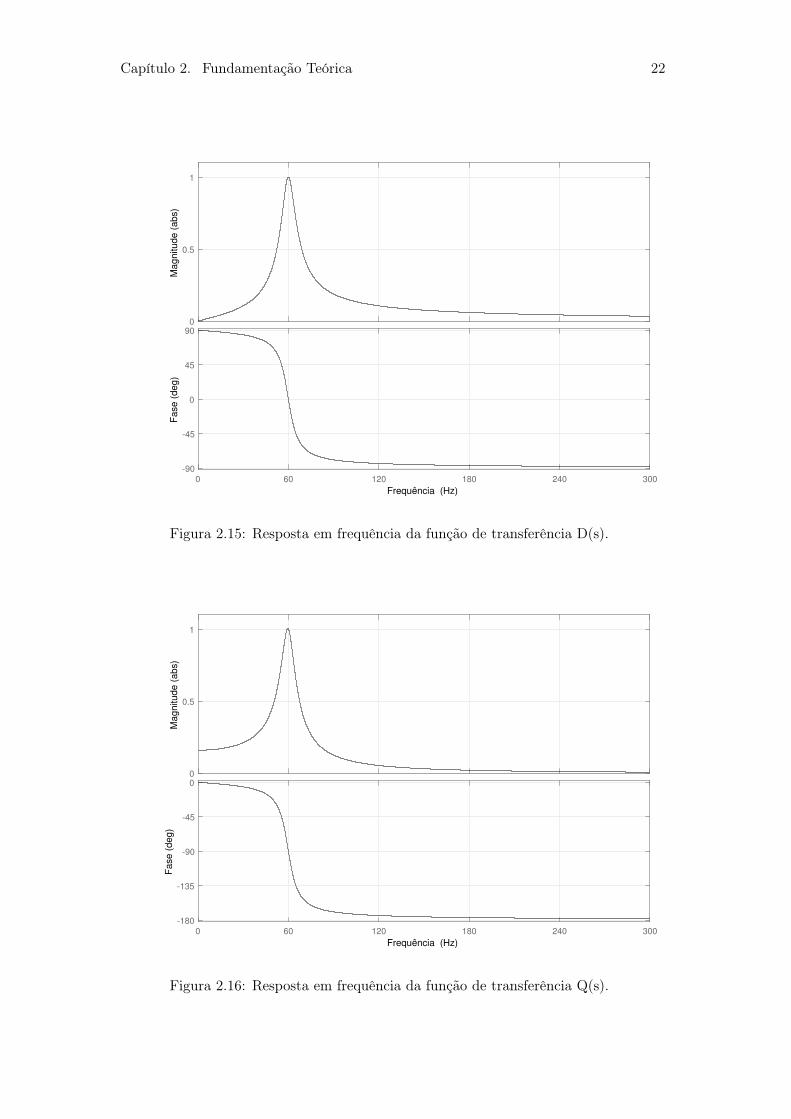
A resposta em frequência da função de transferência 2.10 é representada na Figura
2.15. Este gráfico foi obtido com 𝑘0 = 60.
É possível constatar que o ganho para a entrada é unitário em termos de frequên-
cia fundamental em 60 Hz. Além disso, pode-se observar que a fase é nula em 60 Hz e,
portanto, não há atraso entre o sinal de entrada e 𝑣𝛼.
A resposta em frequência da função de transferência 2.11 do SOGI-PLL é mos-
trada na Figura 2.16.
Do mesmo modo do gráfico anterior, o ganho é unitário na frequência funda-
mental. No entanto, é possível perceber que, nessa frequência, a fase equivale a -90°.
Portanto, 𝑣𝛽 está em quadratura com 𝑣𝛼, conforme desejado [40].
Capítulo 2. Fundamentação Teórica 22
0
0.5
1M
ag
nitu
de
(a
bs)
0 60 120 180 240 300-90
-45
0
45
90
Fa
se
(d
eg
)
Frequência (Hz)
Figura 2.15: Resposta em frequência da função de transferência D(s).
0
0.5
1
Ma
gn
itu
de
(a
bs)
0 60 120 180 240 300-180
-135
-90
-45
0
Fa
se
(d
eg
)
Frequência (Hz)
Figura 2.16: Resposta em frequência da função de transferência Q(s).

23 2.3. Quadrature Signal Generation (QSG-PLL)
A estrutura completa do SOGI-PLL padrão é mostrada na Figura 2.17.
Figura 2.17: Diagrama completo do SOGI-PLL.
Este método aproveita o bom desempenho do PLL de referencial síncrono (SRF-
PLL) que opera originalmente com a rede de tensões trifásicas. Essas tensões são então
transformadas em tensões síncronas 𝑑𝑞 a partir das tensões 𝑣𝑎, 𝑣𝑏, 𝑣𝑐 através da trans-
formação de Clark:
⎡⎢⎢⎢⎢⎣𝑣𝑑
𝑣𝑞
𝑣0
⎤⎥⎥⎥⎥⎦ =√
2/3 ×
⎡⎢⎢⎢⎢⎣cos(𝜃) cos(𝜃 − 2𝜋/3) cos(𝜃 + 2𝜋/3)
− sin (𝜃) − sin (𝜃 − 2𝜋/3) − sin (𝜃 + 2𝜋/3)
1/√
2 1/√
2 1/√
2
⎤⎥⎥⎥⎥⎦⎡⎢⎢⎢⎢⎣𝑣𝑎
𝑣𝑏
𝑣𝑐
⎤⎥⎥⎥⎥⎦ , (2.12)
Sendo 𝜃 = 𝜔𝑡, em que 𝜔 é a frequência das tensões de fase. Assumindo que o
quadro de referência síncrona é referenciado no 𝑑, a tensão 𝑣𝑞 é nula no estado estacionário
e é usada como referência do controlador integral proporcional. Este controlador fornece
a frequência ao oscilador e é auxiliado por um feed forward na frequência fundamental
esperada, 𝑤𝑓𝑓 . Finalmente, o oscilador alimenta a fase 𝜃 para a matriz de transformação
2.12. Vale a pena mencionar que, para redes equilibradas, a tensão 𝑣0 é nula.
O SOGI-PLL utiliza a estrutura mostrada na Figura 2.14 para transformar uma
única tensão senoidal em duas tensões em quadratura, 𝑣𝛼 e 𝑣𝛽 . Essas tensões são então
transformadas em tensões 𝑑𝑞 síncronas através de:
Capítulo 2. Fundamentação Teórica 24
⎡⎢⎢⎢⎢⎣𝑣𝑑
𝑣𝑞
𝑣0
⎤⎥⎥⎥⎥⎦ =
⎡⎢⎢⎢⎢⎣cos(𝜃) sin(𝜃) 0
− sin (𝜃) cos (𝜃) 0
0 0 0
⎤⎥⎥⎥⎥⎦⎡⎢⎢⎢⎢⎣𝑣𝛼
𝑣𝛽
𝑣0
⎤⎥⎥⎥⎥⎦ . (2.13)
Mesmo apresentando ótimas características dinâmicas, muitos autores acreditam
que a realimentação da frequência, empregada no SOGI-PLL, impõe atrasos de conver-
gência que poderiam ser melhorados aplicando-se uma malha de captura de frequência.
Na tentativa de torná-lo mais robusto desenvolveram o SOGI-FLL apresentado a seguir.
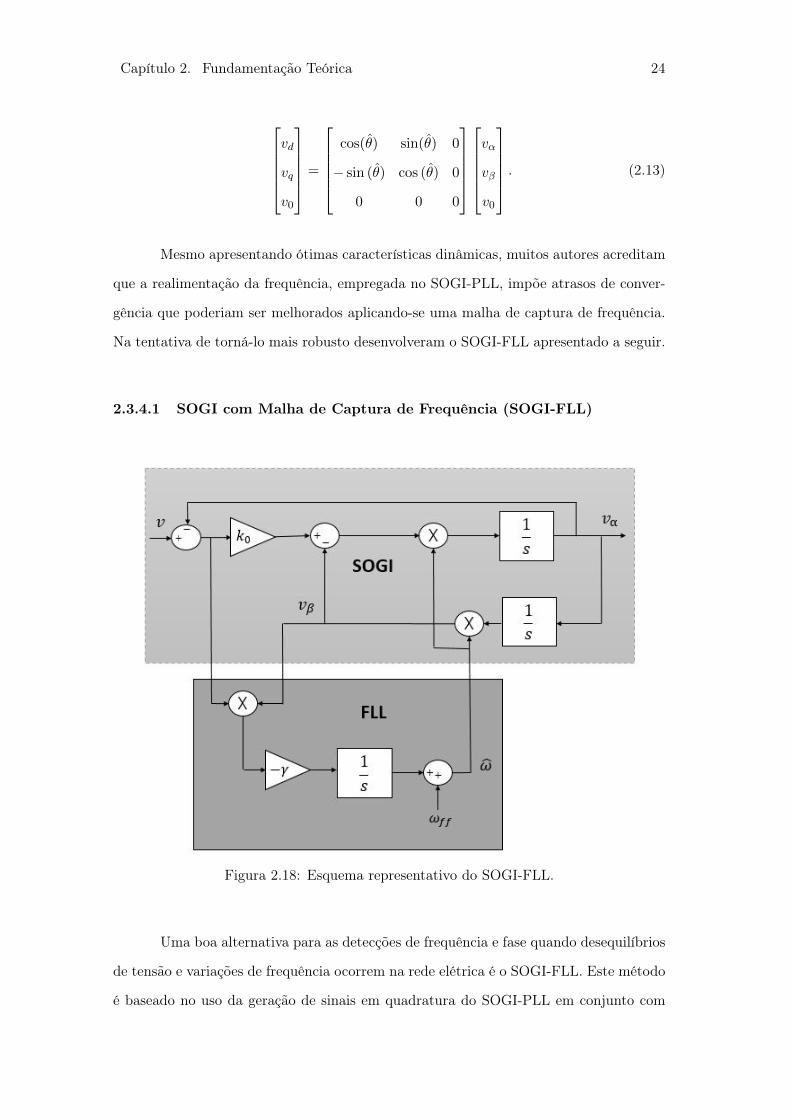
2.3.4.1 SOGI com Malha de Captura de Frequência (SOGI-FLL)
Figura 2.18: Esquema representativo do SOGI-FLL.
Uma boa alternativa para as detecções de frequência e fase quando desequilíbrios
de tensão e variações de frequência ocorrem na rede elétrica é o SOGI-FLL. Este método
é baseado no uso da geração de sinais em quadratura do SOGI-PLL em conjunto com
25 2.3. Quadrature Signal Generation (QSG-PLL)
uma malha de captura de frequência (Frequency-Locked Loop - FLL) [41, 42].
O FLL é um loop de controle simples para auto-adaptar a frequência central do
SOGI para a frequência de entrada, descartando a realimentação da frequência utilizada
na estrutura SOGI-PLL. Esta é a ideia principal que sustenta o estudo do loop de captura
de frequência apresentado nesta seção [43].
A estrutura FLL mostrada na Figura 2.18, é usada para medir a frequência do
sinal de entrada 𝑣, onde é a saída que representa frequência angular estimada do sinal
de entrada, calculada sem usar funções trigonométricas [32], o que facilita sua imple-
mentação em microcontroladores convencionais além de melhorar a resposta dinâmica
do algoritmo.
O desempenho e a resposta dinâmica do SOGI-FLL dependem principalmente da
seleção dos parâmetros de controle 𝑘0 e 𝛾 . As principais expressões do SOGI-FLL são
brevemente definidas para alcançar um desempenho desejado na detecção da amplitude
e frequência do sinal de entrada.
Um controlador integral com um ganho negativo 𝛾 é usado para fazer a frequên-
cia central do SOGI-PLL coincidir com a frequência de entrada. Além disso, como
mostrado na Figura 2.18, ao valor nominal da frequência da rede é adicionado um feed
forward (𝑤𝑓𝑓 ) na saída do FLL, como uma variável de avanço, para acelerar o processo
de sincronização inicial.
O valor do ganho é definido segundo a expressão 2.14 abaixo:
𝛾 =𝑘0
𝑣2Γ (2.14)
A função de transferência da malha de captura de frequência de primeira ordem
é dada por:
Capítulo 2. Fundamentação Teórica 26
𝜔=
Γ
𝑠 + Γ(2.15)
E o tempo de acomodação (𝑡𝑠) da seguinte forma:
𝑡𝑠𝐹𝐿𝐿 ≈ 4.6
Γ(2.16)
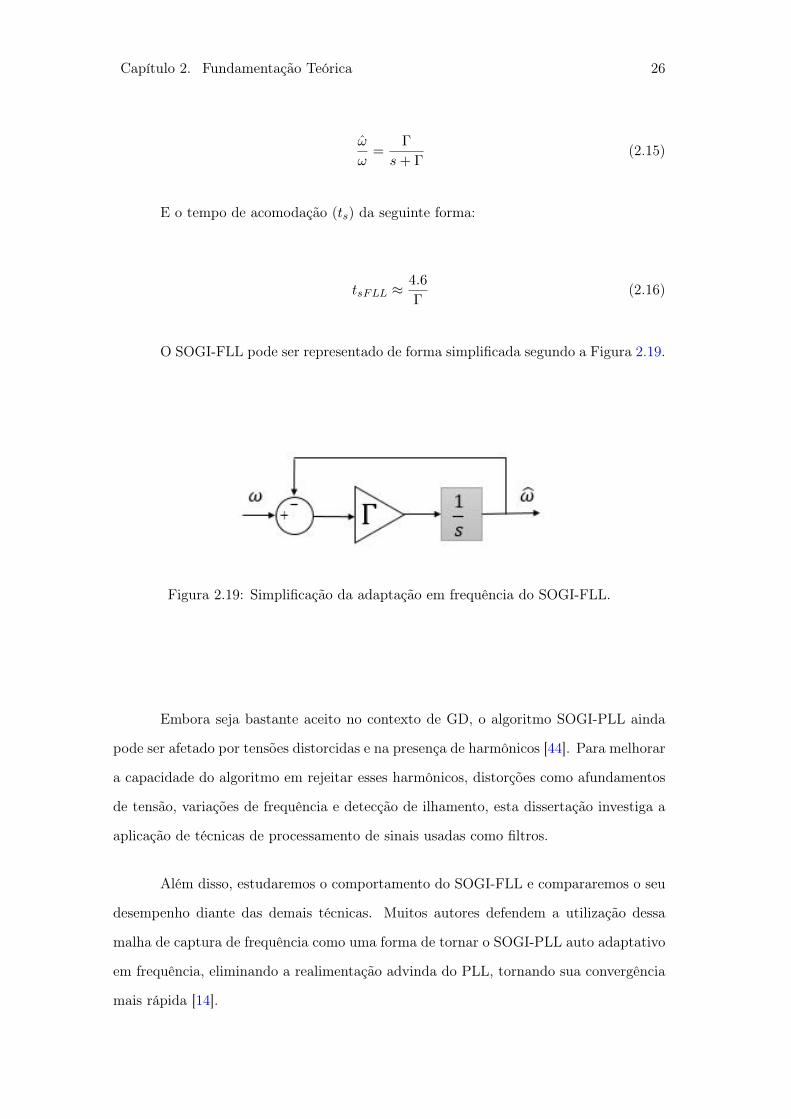
O SOGI-FLL pode ser representado de forma simplificada segundo a Figura 2.19.
Figura 2.19: Simplificação da adaptação em frequência do SOGI-FLL.
Embora seja bastante aceito no contexto de GD, o algoritmo SOGI-PLL ainda
pode ser afetado por tensões distorcidas e na presença de harmônicos [44]. Para melhorar
a capacidade do algoritmo em rejeitar esses harmônicos, distorções como afundamentos
de tensão, variações de frequência e detecção de ilhamento, esta dissertação investiga a
aplicação de técnicas de processamento de sinais usadas como filtros.
Além disso, estudaremos o comportamento do SOGI-FLL e compararemos o seu
desempenho diante das demais técnicas. Muitos autores defendem a utilização dessa
malha de captura de frequência como uma forma de tornar o SOGI-PLL auto adaptativo
em frequência, eliminando a realimentação advinda do PLL, tornando sua convergência
mais rápida [14].

27 2.4. Processamento de Sinais
2.4 Processamento de Sinais
2.4.1 Transformada de Fourier Discreta
A transformada discreta de Fourier pode ser interpretada como um processo
de modulação, permitindo uma interpretação fácil de alguns fenômenos, bem como a
introdução de um método para a computação que pode superar algumas limitações.
Na prática, a análise de frequência em sinais de tempo discreto é mais convenien-
temente realizada em um processador de sinal digital em vez do processamento analógico.
Por definição, o DTFT é executada através de um comprimento infinito de sequência e
a frequência é uma variável contínua. Essas restrições tornam o processamento des-
sas sequências não viável em um processador digital. Para superar essas limitações, a
transformada discreta de Fourier (DFT) é usada [45]. As equações para análise dessa
transformada são definidas por:
𝑋[𝑘] =𝑁−1∑𝑛=0
𝑥[𝑛]𝑒−𝑗2𝜋𝑘𝑛/𝑁 , (2.17)
A equação 2.17 é a DFT direta e a soma é realizada sobre N amostras de 𝑥[𝑛],
𝑛 = 0, 1, ..., 𝑁 − 1, logo 𝑋[𝑘] é a transformada discreta de Fourier do sinal 𝑥[𝑛].
Uma representação comum da DFT usa a simplificação do termo exponencial:
𝑊𝑁 = 𝑒−𝑗2𝜋/𝑁 , (2.18)
Dessa forma a DFT pode ser representada por 2.19:
𝑋[𝑘] =
𝑁−1∑𝑛=0
𝑥[𝑛]𝑊𝑛𝑘. (2.19)
Capítulo 2. Fundamentação Teórica 28
A DFT é uma ferramenta matemática para obter o espectro de Fourier usando
o processamento computacional. Outra abordagem bastante aplicada a sistemas reais é
a DFT recursiva.
2.4.2 DFT Recursiva
Em aplicações em tempo real onde as componentes DFT precisam ser computados
a cada nova amostra, a DFT recursiva representa uma maneira eficiente de calcular esses
componentes.
Para obter a expressão básica para o componente 𝑘𝑡ℎ, considera-se duas janelas
de dados consecutivas. A janela de dados 𝑛−1 é definida como 𝑥𝑛−1 =𝑥[𝑛−𝑚], 𝑥[𝑛−
𝑚 + 1]...𝑥[𝑛 − 2], 𝑥[𝑛 − 1]
e a janela de dados n como 𝑥𝑛 =𝑥[𝑛 −𝑁 + 1], 𝑥[𝑛 −𝑁 +
2]...𝑥[𝑛− 1], 𝑥[𝑛].
A DFT para a 𝑘𝑡ℎ harmônico para a janela 𝑛 é dada por:
𝑋𝑘[𝑛] =𝑁−1∑𝑚=0
𝑥[𝑛−𝑚]𝑊𝑘(𝑁−𝑚−1)𝑁 , 𝑘 = 0,1,...𝑁 − 1, (2.20)
Alterar as variáveis resulta:
𝑋𝑘[𝑛] =
𝑛∑𝑙=𝑛−𝑁+1
𝑥[𝑙]𝑊𝑘(𝑁+𝑙−𝑛−1)𝑁 , (2.21)
A DFT para a janela 𝑛− 1 é facilmente obtida como:
𝑋𝑘[𝑛− 1] =
𝑛−1∑𝑙=𝑛−𝑁
𝑥[𝑙]𝑊𝑘(𝑁+𝑙−𝑛)𝑁 , (2.22)
Multiplicando ambos os lados por 𝑊−𝑘𝑁 resulta em:

29 2.4. Processamento de Sinais
𝑊−𝑘𝑁 𝑋𝑘[𝑛− 1] =
𝑛−1∑𝑙=𝑛−𝑁
𝑥[𝑙]𝑊𝑘(𝑁+𝑙−𝑛−1)𝑁 , (2.23)
Reorganizando o segundo termo de Equação 2.23 tem-se:
𝑊−𝑘𝑁 𝑋𝑘[𝑛− 1] =
𝑛−1∑𝑙=𝑛−𝑁
𝑥[𝑙]𝑊𝑘(𝑁+𝑙−𝑛−1)𝑁 +𝑊−𝑘
𝑁 (𝑋𝑘[𝑛− 1] + 𝑥[𝑛] − 𝑥[𝑛−𝑚]) , (2.24)
sabendo que 𝑊 𝑘𝑁𝑁 = 1 o somatório na Equação 2.24 pode ser facilmente simpli-
ficado e a expressão final para uma DFT recursiva se torna:
𝑋𝑘[𝑛] = 𝑊−𝑘𝑁 (𝑋𝑘[𝑛− 1] + 𝑥[𝑛] − 𝑥[𝑛−𝑚]) . (2.25)
2.4.3 Filtro de Média Móvel
O filtro de média móvel é amplamente empregado no processo de estimativa de
parâmetros e decomposição harmônica, sendo uma técnica muito comum em aplicações
de sistemas de energia devido à sua simplicidade e baixo esforço computacional [45].
O MAF pode ser entendido como uma janela retangular, um filtro FIR, definido
através da equação 2.26:
𝑦[𝑛] =1
𝑀
𝑀−1∑𝑘=0
𝑥[𝑛− 𝑘], (2.26)
Sua resposta ao impulso é dada por ℎ[𝑛] = 1/𝑀, (𝑛 = 0, 1...,𝑀 − 1). Desta
forma, a equação pode ser reescrita:

Capítulo 2. Fundamentação Teórica 30
𝑦[𝑛] =1
𝑀
(𝑀∑𝑘=1
𝑥[𝑛− 𝑘] + 𝑥[𝑛] − 𝑥[𝑛−𝑀 ]
), (2.27)
Da equação 2.27 temos:
𝑦[𝑛− 1] =1
𝑀
𝑀−1∑𝑘=0
𝑥[𝑛− 1 − 𝑘] =1
𝑀
𝑀∑𝑙=1
𝑥[𝑛− 𝑙], (2.28)
E finalmente:
𝑦[𝑛] = 𝑦[𝑛− 1] +1
𝑀(𝑥[𝑛] − 𝑥[𝑛−𝑀 ]). (2.29)

Capítulo 3
Aprimoramento do SOGI-PLL
Através de Filtros Digitais
Em várias aplicações do sistema de energia, principalmente em relação à deter-
minação de parâmetros (como por exemplo, frequência e fase), é usual que a estimativa
apresente variações causadas por ruído aditivo ou por outros componentes indesejados na
rede, que podem produzir erro no processo de obtenção de tais parâmetros. Na maioria
dos casos, essas variações podem ser filtradas [45].
Neste capítulo serão apresentados dois métodos para filtragem associada a sincro-
nização do SOGI-PLL que permitirão superar algumas de suas limitações, tornando-o
mais robusto diante de situações desequilibradas e distorcidas, presentes em sistemas
de energia fracos. Serão também descritos como essas técnicas serão incorporadas ao
SOGI-PLL e como são definidos os parâmetros do controlador empregado.
As técnicas propostas utilizam o algoritmo de Fourier de um ciclo (OCF) e o
filtro de média móvel (MAF). Aplica-se, então, um PLL em referência síncrona sob os
sinais de tensão filtrados.
Será demonstrado matematicamente que ambos os métodos podem ser interpre-

Capítulo 3. Aprimoramento do SOGI-PLL Através de Filtros Digitais 32
tados como técnicas de filtragem a partir da transformada discreta de Fourier.
3.1 Filtros Digitais
O chamado algoritmo de Fourier de um ciclo é uma técnica amplamente utilizada
no campo da proteção digital para extrair fatores fundamentais das tensões medidas
a partir da rede. Para entender o algoritmo, é útil fazer uso de um abordagem que
interpreta a transformada de Fourier discreta como uma técnica de filtragem [45]. Para
isso, serão retomadas algumas definições matemáticas vistas no Capítulo 2. Permitamos
primeiro definir:
𝑊𝑁 = 𝑒−𝑗2𝜋/𝑁 , (3.1)
onde 𝑁 é o número de amostras em um ciclo do sinal e 𝑥[𝑛] o sinal a ser filtrado.
A transformada discreta de Fourier (DFT) é definida como:
𝑋[𝑘] =
𝑁−1∑𝑛=0
𝑥[𝑛]𝑊𝑛𝑘. (3.2)
É possível manipular 3.2, para obter uma equação em que a DFT é atualizada
em cada 𝑛. Em caso de destaque de um 𝑘𝑡ℎ harmônico particular, é dada uma nova
equação para a DFT de:
𝑋𝑘[𝑛] =
𝑁−1∑𝑚=0
𝑥[𝑛−𝑚]𝑊𝑘(𝑁−𝑚−1)𝑁 , 𝑘 = 0,1,...𝑁 − 1, (3.3)
que pode ser prontamente reescrito como:

33 3.1. Filtros Digitais
𝑋𝑘[𝑛] = 𝑊 𝑘𝑁
𝑁−1∑𝑚=0
𝑥[𝑛−𝑚]𝑒𝑗2𝜋𝑚𝑘/𝑁 , (3.4)
uma vez 𝑊 𝑘𝑁 é constante para a soma. Agora, observando 3.4, pode-se interpretá-
la como uma convolução do sinal 𝑥[𝑛] com um filtro de comprimento 𝑁 , ℎ, dado por:
ℎ = 𝑊 𝑘𝑁 [1 𝑒𝑗2𝜋𝑘/𝑁 𝑒𝑗2𝜋2𝑘/𝑁 ... 𝑒𝑗2𝜋(𝑁−1)𝑘/𝑁 ]. (3.5)
O filtro de Fourier de ciclo único ℎ𝐹 é obtido fazendo k = 1, isto é:
ℎ𝐹 = 𝑊𝑁 [1 𝑒𝑗2𝜋/𝑁 𝑒𝑗2𝜋2/𝑁 ... 𝑒𝑗2𝜋(𝑁−1)/𝑁 ]. (3.6)
O filtro MAF ℎ𝑀 é obtido com k = 0:
ℎ𝑀 = [1 1 1 ...1]. (3.7)
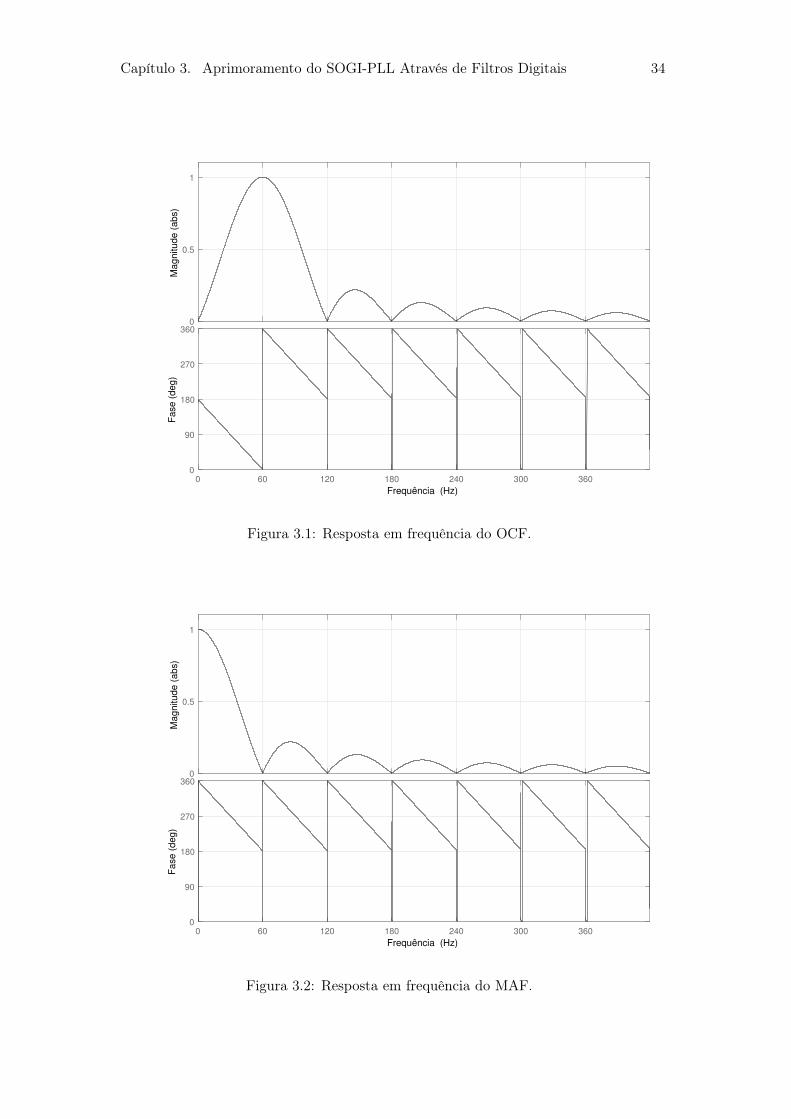
A resposta em frequência do filtro de Fourier é representada na Figura 3.1.
Pode-se observar que este filtro tem ganho unitário na frequência fundamental de
60 Hz e o ganho é nulo para os frequências harmônicas. Além disso, pode notar-se que a
60 Hz, o atraso de fase é nulo, o que não é atrasado é imposto pelo filtro na frequência
fundamental em condições de estado estacionário. Outra característica que vale a pena
mencionar é que o filtro tem ganhos nulos para componentes DC.
A robustez harmônica do OCF pode ser percebida por meio da sua resposta em
frequência. É possível notar que o OCF pode atenuar os harmônicos que contaminam o
sinal a ser filtrado, sendo capaz de aprimorar assim a dinâmica do SOGI.
A resposta em frequência do MAF é mostrada na Figura 3.2.
Capítulo 3. Aprimoramento do SOGI-PLL Através de Filtros Digitais 34
0
0.5
1M
ag
nitu
de
(a
bs)
0 60 120 180 240 300 3600
90
180
270
360
Fa
se
(d
eg
)
Frequência (Hz)
Figura 3.1: Resposta em frequência do OCF.
0
0.5
1
Ma
gn
itu
de
(a
bs)
0 60 120 180 240 300 3600
90
180
270
360
Fa
se
(d
eg
)
Frequência (Hz)
Figura 3.2: Resposta em frequência do MAF.
35 3.2. Métodos Propostos
É possível notar que, ao contrário do filtro de Fourier, o ganho DC é unitário e as
frequências fundamentais e harmônicas estão relacionadas a ganhos nulos. Devido a essas
características, este filtro é adequado para distorções em filtragem de sinais de corrente
contínua (CC) . Com relação à resposta de fase, o filtro MAF tem um comportamento
semelhante ao filtro de Fourier.
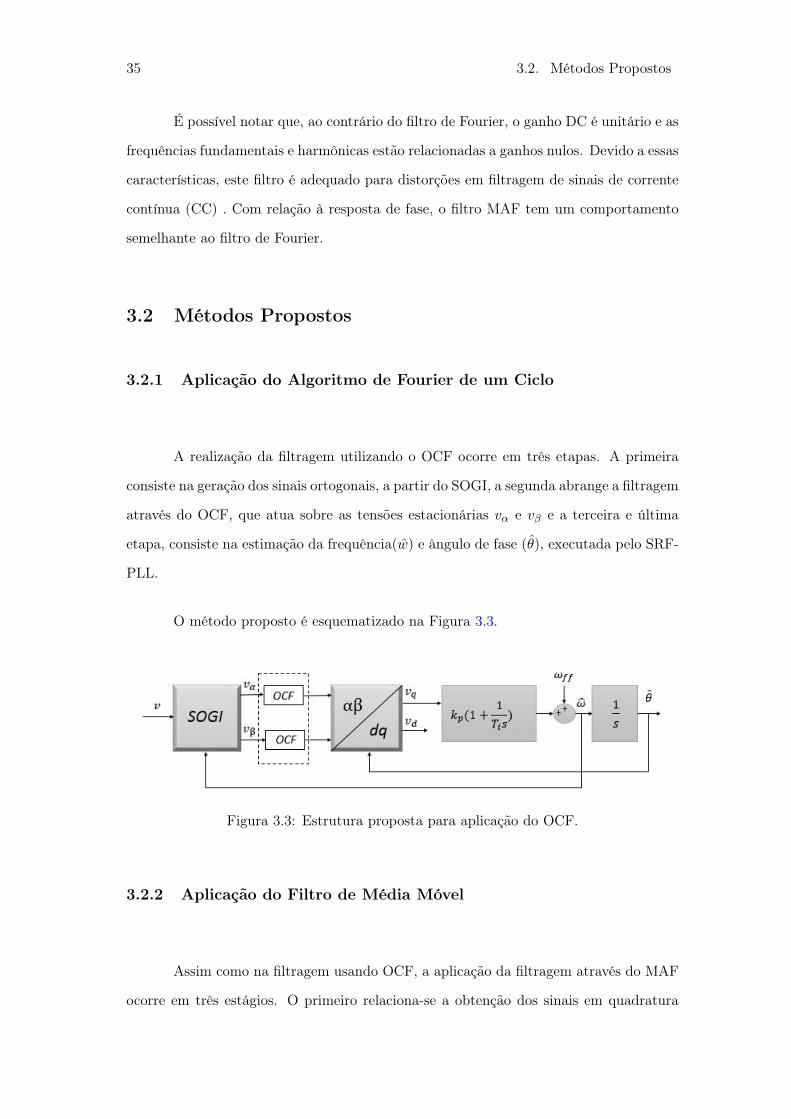
3.2 Métodos Propostos
3.2.1 Aplicação do Algoritmo de Fourier de um Ciclo
A realização da filtragem utilizando o OCF ocorre em três etapas. A primeira
consiste na geração dos sinais ortogonais, a partir do SOGI, a segunda abrange a filtragem
através do OCF, que atua sobre as tensões estacionárias 𝑣𝛼 e 𝑣𝛽 e a terceira e última
etapa, consiste na estimação da frequência() e ângulo de fase (𝜃), executada pelo SRF-
PLL.
O método proposto é esquematizado na Figura 3.3.
Figura 3.3: Estrutura proposta para aplicação do OCF.
3.2.2 Aplicação do Filtro de Média Móvel
Assim como na filtragem usando OCF, a aplicação da filtragem através do MAF
ocorre em três estágios. O primeiro relaciona-se a obtenção dos sinais em quadratura
Capítulo 3. Aprimoramento do SOGI-PLL Através de Filtros Digitais 36
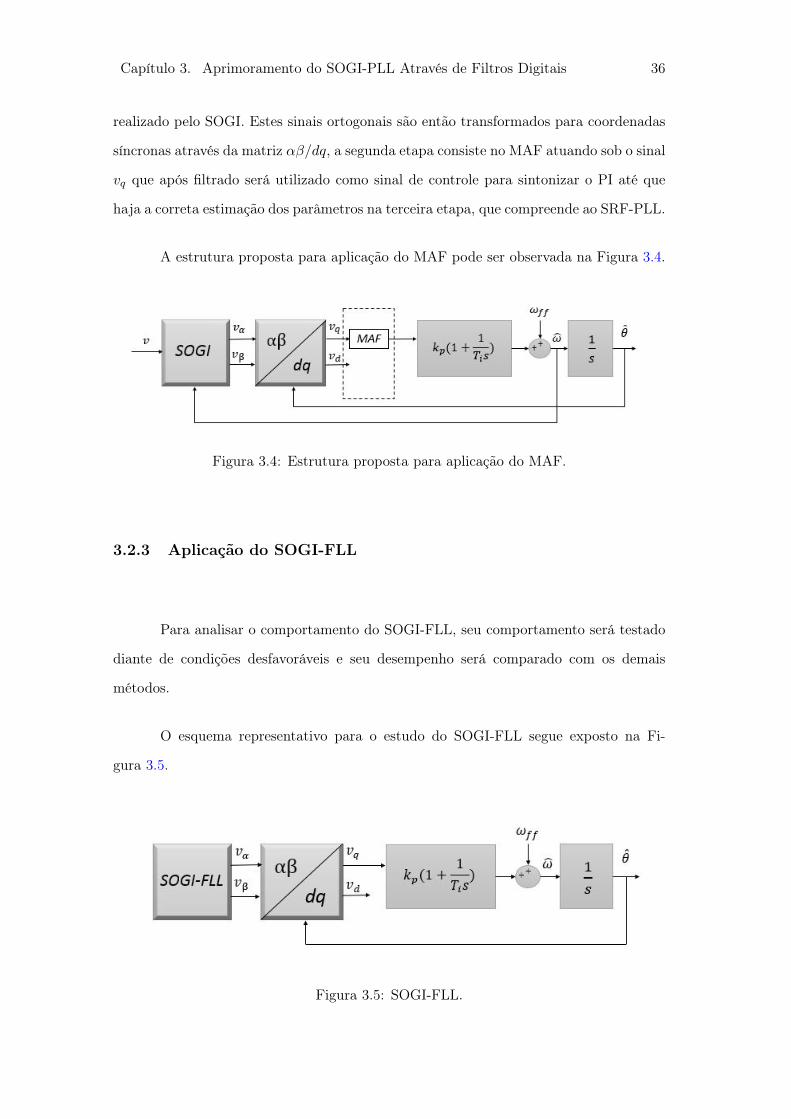
realizado pelo SOGI. Estes sinais ortogonais são então transformados para coordenadas
síncronas através da matriz 𝛼𝛽/𝑑𝑞, a segunda etapa consiste no MAF atuando sob o sinal
𝑣𝑞 que após filtrado será utilizado como sinal de controle para sintonizar o PI até que
haja a correta estimação dos parâmetros na terceira etapa, que compreende ao SRF-PLL.
A estrutura proposta para aplicação do MAF pode ser observada na Figura 3.4.
Figura 3.4: Estrutura proposta para aplicação do MAF.
3.2.3 Aplicação do SOGI-FLL
Para analisar o comportamento do SOGI-FLL, seu comportamento será testado
diante de condições desfavoráveis e seu desempenho será comparado com os demais
métodos.
O esquema representativo para o estudo do SOGI-FLL segue exposto na Fi-
gura 3.5.
Figura 3.5: SOGI-FLL.
37 3.3. Definição dos Parâmetros do Controlador PI
No capítulo seguinte apresentam-se os resultados obtidos a partir dos métodos
propostos diante de cenários adversos. Os desempenhos são então comparados ao SOGI-
PLL padrão e ao SOGI-FLL.
3.3 Definição dos Parâmetros do Controlador PI
A sintonização dos parâmetros do controlador é um ponto crítico dentro de um
projeto. Do ponto de vista dos sistemas dinâmicos, ganhos elevados implicam dinâmica
mais rápida, por outro lado uma resposta rápida pode vir acompanhada de uma oscilação
acentuada.
Para que os parâmetros sejam estimados corretamente é necessário que haja uma
análise precisa da função de transferência do sistema em malha fechada [16].
A função de transferência do sistema estudado nesta dissertação é expressa por:
𝐻(𝑠) =𝑘𝑝𝑠 + 𝑘𝑖
𝑠2 + 𝑘𝑝𝑠 + 𝑘𝑖. (3.8)
onde 𝑘𝑝 e 𝑘𝑖 são os ganhos proporcional e integral, respectivamente. A função
de transferência 𝐻(𝑠) de segunda ordem representada em 3.8 é semelhante a função de
transferência 𝐺(𝑠) abaixo.
𝐺(𝑠) =2𝜁𝑤0𝑠 + 𝑤0
2
𝑠2 + 2𝜁𝑤0𝑠 + 𝑤02. (3.9)
em que 𝑤0 representa a frequência angular natural e 𝜁 é o fator de amortecimento.
A partir de 3.8 e 3.9 tem-se:
𝑘𝑝 =9.2
𝑡𝑠, (3.10)
Capítulo 3. Aprimoramento do SOGI-PLL Através de Filtros Digitais 38
𝑤0 =𝑘𝑝2𝜁
, (3.11)
𝑘𝑖 = 𝑤02. (3.12)
onde 𝑡𝑠 é o tempo de acomodação.
Neste projeto, os ganhos foram calculados para um 𝑡𝑠 = 50𝑚𝑠, permitindo uma
resposta rápida do algoritmo quando uma variação de frequência nominal ocorre. O fator
de amortecimento considerado foi de 𝜁 = 0,707.
Para obter um desempenho adequado dos algoritmos, um aspecto importante que
deve ser destacado ao projetar os ganhos 𝑘𝑝 e 𝑘𝑖 é que a frequência angular natural(𝑤0) da
função de transferência do controlador PI deve ser menor que a frequência fundamental
() do bloco SOGI [46]. Por isso, o valor escolhido foi de 𝑤0 = 130𝑟𝑎𝑑/𝑠.
Dessa forma, os valores obtidos a partir das equações para os parâmetros do
controlador foram: 𝑘𝑝 = 184 e 𝑘𝑖 = 16928.
Capítulo 4
Resultados
Neste capítulo são apresentados testes realizados com a finalidade de comparar o
desempenho na sincronização do SOGI-PLL padrão com o mesmo SOGI-PLL aprimorado
pela técnica MAF e pelo filtro OCF, propostos nesta dissertação. Além disso, traremos
a comparação dessas técnicas com um método de melhoramento do SOGI-PLL padrão,
bastante aceito na literatura, o SOGI-FLL. Neste contexto, consideram-se a eficácia na
rejeição de componentes harmônicas, a tolerância em relação a afundamentos e desba-
lanços de tensão no sistema de distribuição e também é observado o comportamento, das
diferentes técnicas, diante de variações de frequência e detecção de ilhamento.
Inicialmente, as técnicas são testadas em um sinal submetido a uma queda de
tensão durante um período predeterminado. No segundo cenário, são testadas em um
sinal submetido à mesma queda acrescida de contaminação com distorção harmônica,
com harmônicos de quinta, sétima e décima primeira ordens. No terceiro cenário, essas
técnicas são expostas a uma mudança de frequência. No quarto cenário, são testadas
diante de uma detecção de ilhamento e por fim, a validação das técnicas é realizada
através de um arranjo experimental.
Os resultados obtidos através das simulações no software Matlab assim como
aqueles obtidos por meio do aparato experimental estão dispostos nas seções a seguir.
Capítulo 4. Resultados 40
4.1 Afundamento de Tensão
Preliminarmente foi avaliada a capacidade dos métodos na correta estimativa da
frequência e do ângulo de fase da rede elétrica diante do sinal afundado, apresentado na
Figura 4.1. Este sinal apresenta comportamento senoidal e sem distorções, no primeiro
momento, mas no intervalo de 0,16 a 0,32s sofre um afundamento e sua amplitude decai
para 80% do seu valor inicial, retornando posteriormente, à sua amplitude máxima.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Tempo(s)
-1
-0.5
0
0.5
1
Tensão (
%)
Figura 4.1: Sinal de tensão monofásico afundado.
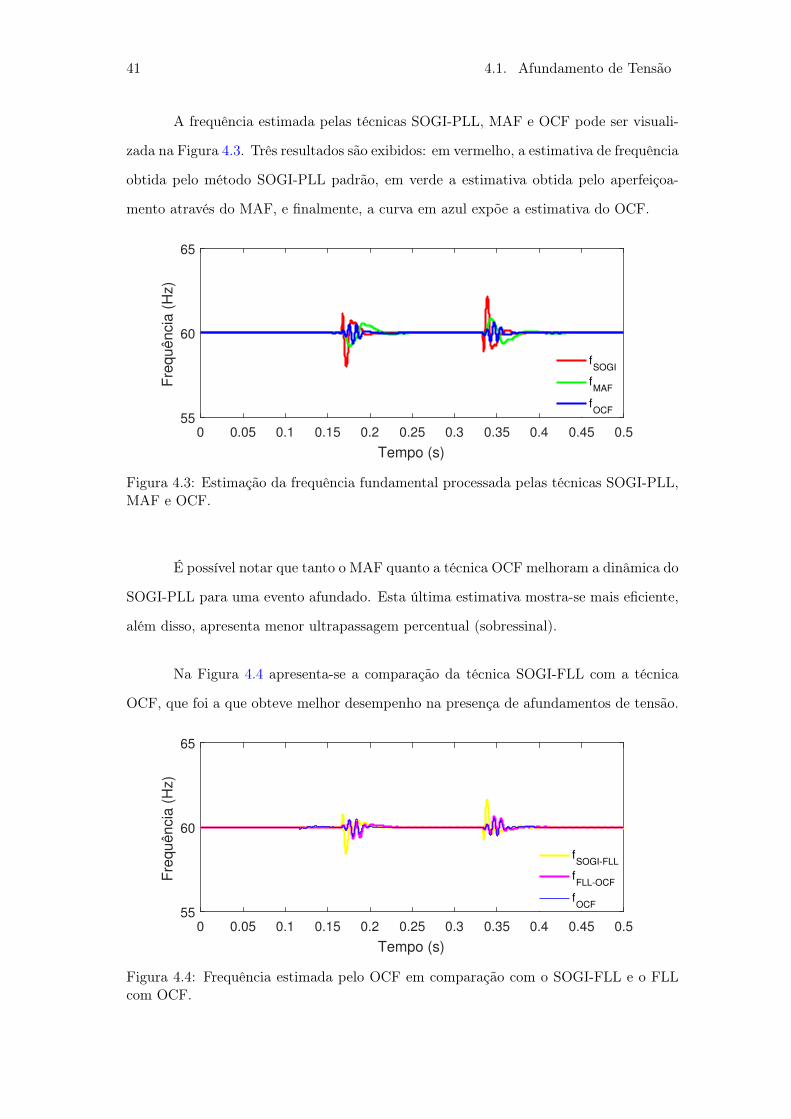
Na Figura 4.2 é possível observar que mesmo diante de um cenário adverso,
o SOGI-PLL se mostra muito eficiente em termos de rapidez no estabelecimento da
quadratura, legitimando a sua aceitabilidade no contexto da geração distribuída.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Tempo(s)
-1
-0.5
0
0.5
1
Tensão (
%)
Vα
Vβ
Figura 4.2: Sinais 𝑉𝛼 e 𝑉𝛽 em quadratura no primeiro cenário.
41 4.1. Afundamento de Tensão
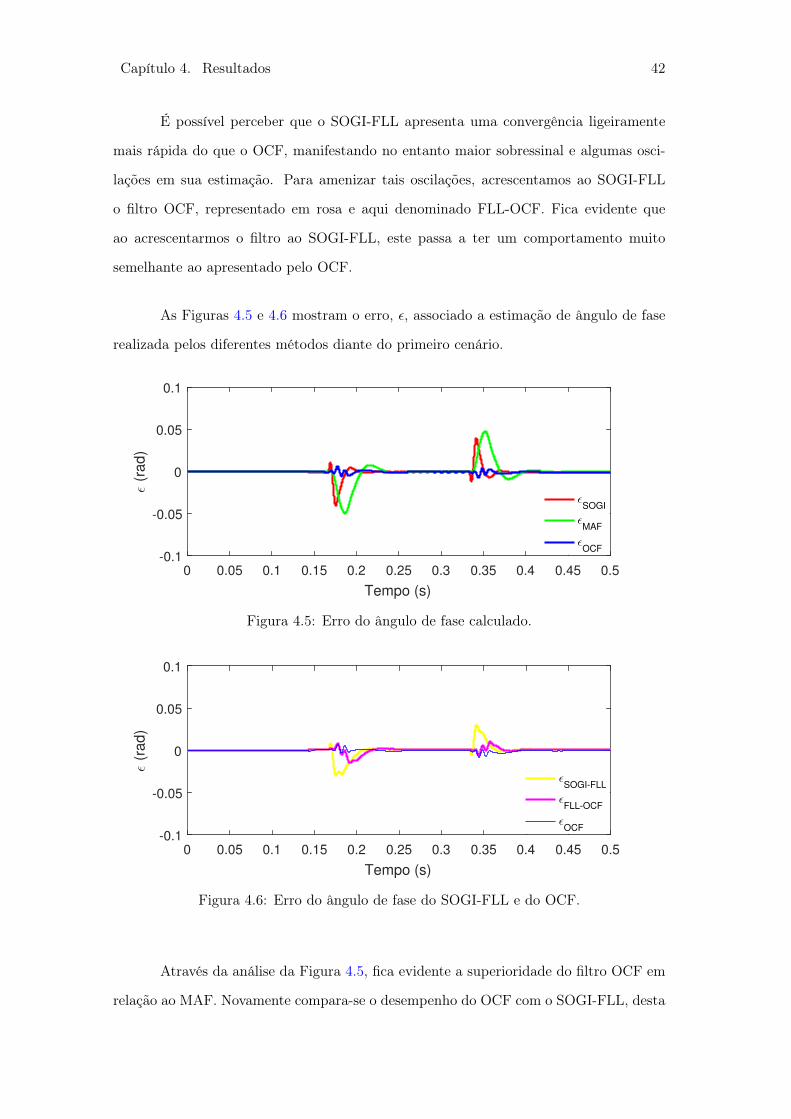
A frequência estimada pelas técnicas SOGI-PLL, MAF e OCF pode ser visuali-
zada na Figura 4.3. Três resultados são exibidos: em vermelho, a estimativa de frequência
obtida pelo método SOGI-PLL padrão, em verde a estimativa obtida pelo aperfeiçoa-
mento através do MAF, e finalmente, a curva em azul expõe a estimativa do OCF.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Tempo (s)
55
60
65
Fre
quência
(H
z)
fSOGI
fMAF
fOCF
Figura 4.3: Estimação da frequência fundamental processada pelas técnicas SOGI-PLL,MAF e OCF.
É possível notar que tanto o MAF quanto a técnica OCF melhoram a dinâmica do
SOGI-PLL para uma evento afundado. Esta última estimativa mostra-se mais eficiente,
além disso, apresenta menor ultrapassagem percentual (sobressinal).
Na Figura 4.4 apresenta-se a comparação da técnica SOGI-FLL com a técnica
OCF, que foi a que obteve melhor desempenho na presença de afundamentos de tensão.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Tempo (s)
55
60
65
Fre
quência
(H
z)
fSOGI-FLL
fFLL-OCF
fOCF
Figura 4.4: Frequência estimada pelo OCF em comparação com o SOGI-FLL e o FLLcom OCF.
Capítulo 4. Resultados 42
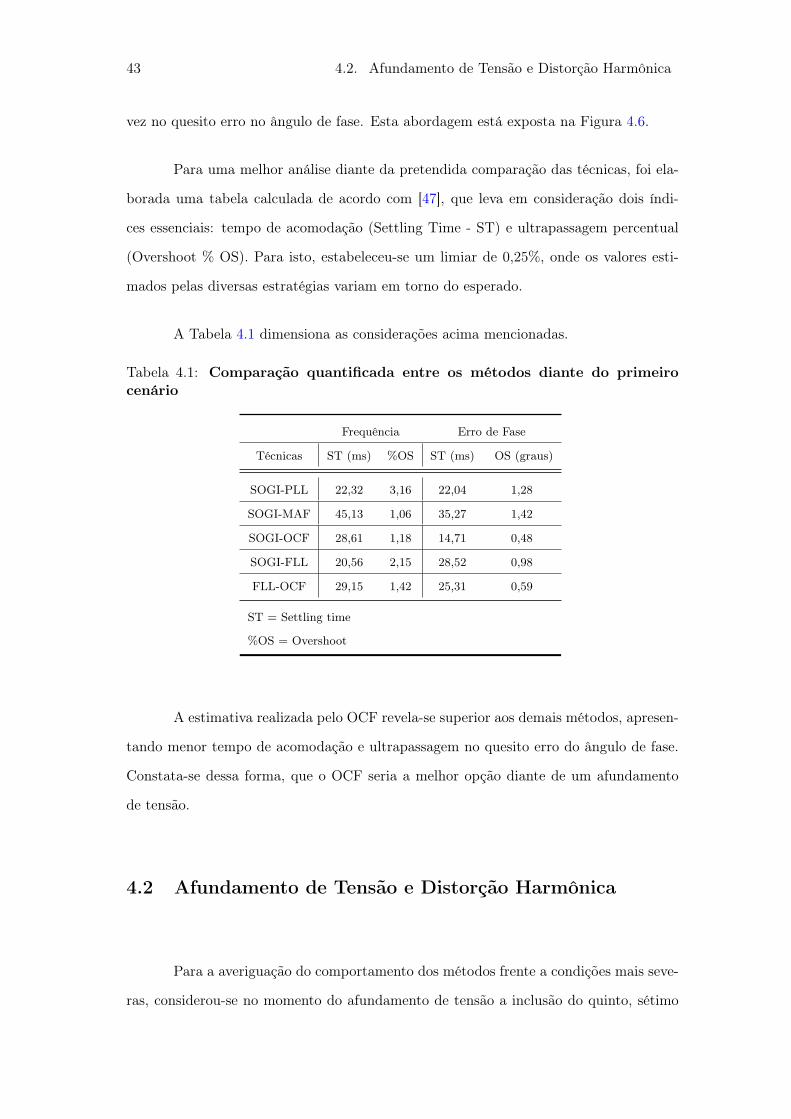
É possível perceber que o SOGI-FLL apresenta uma convergência ligeiramente
mais rápida do que o OCF, manifestando no entanto maior sobressinal e algumas osci-
lações em sua estimação. Para amenizar tais oscilações, acrescentamos ao SOGI-FLL
o filtro OCF, representado em rosa e aqui denominado FLL-OCF. Fica evidente que
ao acrescentarmos o filtro ao SOGI-FLL, este passa a ter um comportamento muito
semelhante ao apresentado pelo OCF.
As Figuras 4.5 e 4.6 mostram o erro, 𝜖, associado a estimação de ângulo de fase
realizada pelos diferentes métodos diante do primeiro cenário.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Tempo (s)
-0.1
-0.05
0
0.05
0.1
ǫ (
rad
)
ǫSOGI
ǫMAF
ǫOCF
Figura 4.5: Erro do ângulo de fase calculado.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Tempo (s)
-0.1
-0.05
0
0.05
0.1
ǫ (
rad)
ǫSOGI-FLL
ǫFLL-OCF
ǫOCF
Figura 4.6: Erro do ângulo de fase do SOGI-FLL e do OCF.
Através da análise da Figura 4.5, fica evidente a superioridade do filtro OCF em
relação ao MAF. Novamente compara-se o desempenho do OCF com o SOGI-FLL, desta
43 4.2. Afundamento de Tensão e Distorção Harmônica
vez no quesito erro no ângulo de fase. Esta abordagem está exposta na Figura 4.6.
Para uma melhor análise diante da pretendida comparação das técnicas, foi ela-
borada uma tabela calculada de acordo com [47], que leva em consideração dois índi-
ces essenciais: tempo de acomodação (Settling Time - ST) e ultrapassagem percentual
(Overshoot % OS). Para isto, estabeleceu-se um limiar de 0,25%, onde os valores esti-
mados pelas diversas estratégias variam em torno do esperado.
A Tabela 4.1 dimensiona as considerações acima mencionadas.
Tabela 4.1: Comparação quantificada entre os métodos diante do primeirocenário
Frequência Erro de Fase
Técnicas ST (ms) %OS ST (ms) OS (graus)
SOGI-PLL 22,32 3,16 22,04 1,28
SOGI-MAF 45,13 1,06 35,27 1,42
SOGI-OCF 28,61 1,18 14,71 0,48
SOGI-FLL 20,56 2,15 28,52 0,98
FLL-OCF 29,15 1,42 25,31 0,59
ST = Settling time
%OS = Overshoot
A estimativa realizada pelo OCF revela-se superior aos demais métodos, apresen-
tando menor tempo de acomodação e ultrapassagem no quesito erro do ângulo de fase.
Constata-se dessa forma, que o OCF seria a melhor opção diante de um afundamento
de tensão.
4.2 Afundamento de Tensão e Distorção Harmônica
Para a averiguação do comportamento dos métodos frente a condições mais seve-
ras, considerou-se no momento do afundamento de tensão a inclusão do quinto, sétimo

Capítulo 4. Resultados 44
e décimo primeiro harmônicos. A amplitude considerada para todos eles foi de 0.07 V.
O sinal contaminado com afundamento e distorção harmônica segue representado na
Figura 4.7.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Tempo(s)
-1
-0.5
0
0.5
1
Tensão (
%)
Figura 4.7: Sinal de tensão monofásico desbalanceado com presença de harmônicos.
A quadratura alcançada pelo SOGI-PLL na presença do afundamento com dis-
torção harmônica pode ser verificada abaixo, na Figura 4.8.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Tempo(s)
-1
-0.5
0
0.5
1
Tensão (
%)
Vα
Vβ
Figura 4.8: Sinais 𝑉𝛼 e 𝑉𝛽 no segundo cenário.
É possível observar que essa quadratura se dá de forma rápida, demostrando,
mais uma vez, o porquê deste método ser tão aceito no âmbito de GD.
As Figuras 4.9 e 4.10 mostram os resultados obtidos na estimativa da frequência,
expondo a comparação do SOGI, MAF, OCF e SOGI-FLL diante do segundo cenário,
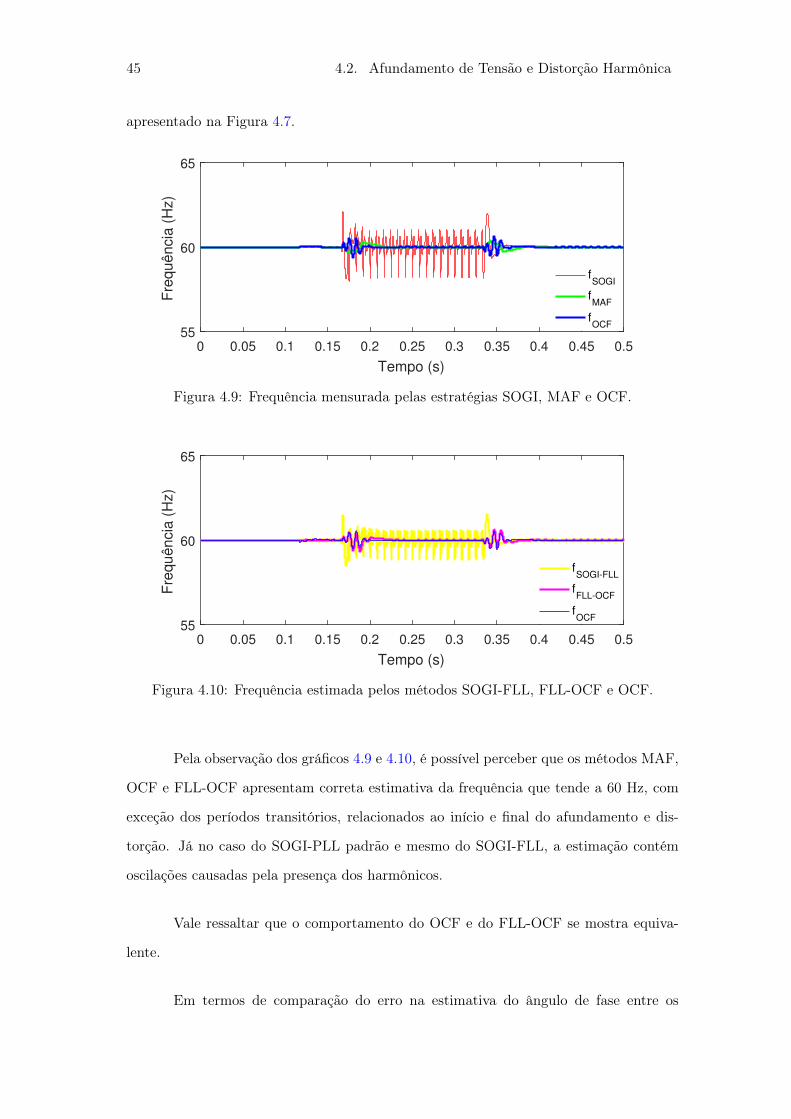
45 4.2. Afundamento de Tensão e Distorção Harmônica
apresentado na Figura 4.7.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Tempo (s)
55
60
65F
requência
(H
z)
fSOGI
fMAF
fOCF
Figura 4.9: Frequência mensurada pelas estratégias SOGI, MAF e OCF.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Tempo (s)
55
60
65
Fre
quência
(H
z)
fSOGI-FLL
fFLL-OCF
fOCF
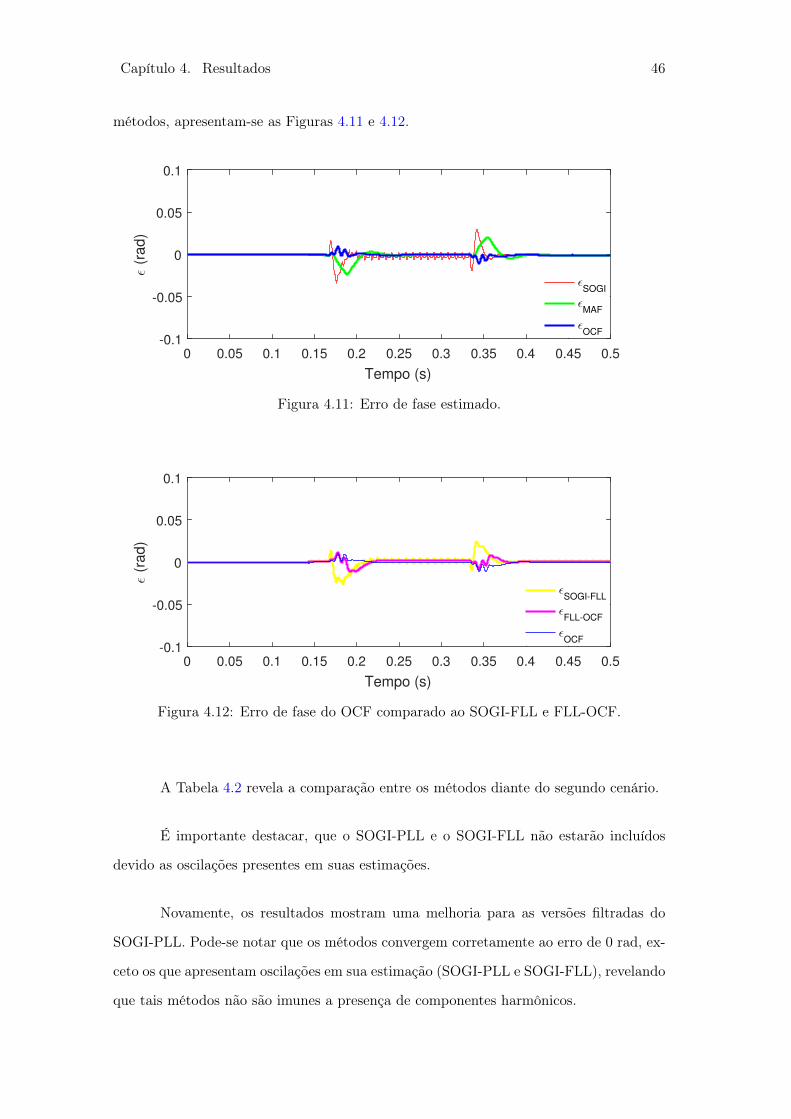
Figura 4.10: Frequência estimada pelos métodos SOGI-FLL, FLL-OCF e OCF.
Pela observação dos gráficos 4.9 e 4.10, é possível perceber que os métodos MAF,
OCF e FLL-OCF apresentam correta estimativa da frequência que tende a 60 Hz, com
exceção dos períodos transitórios, relacionados ao início e final do afundamento e dis-
torção. Já no caso do SOGI-PLL padrão e mesmo do SOGI-FLL, a estimação contém
oscilações causadas pela presença dos harmônicos.
Vale ressaltar que o comportamento do OCF e do FLL-OCF se mostra equiva-
lente.
Em termos de comparação do erro na estimativa do ângulo de fase entre os
Capítulo 4. Resultados 46
métodos, apresentam-se as Figuras 4.11 e 4.12.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Tempo (s)
-0.1
-0.05
0
0.05
0.1
ǫ (
rad)
ǫSOGI
ǫMAF
ǫOCF
Figura 4.11: Erro de fase estimado.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Tempo (s)
-0.1
-0.05
0
0.05
0.1
ǫ (
rad)
ǫSOGI-FLL
ǫFLL-OCF
ǫOCF
Figura 4.12: Erro de fase do OCF comparado ao SOGI-FLL e FLL-OCF.
A Tabela 4.2 revela a comparação entre os métodos diante do segundo cenário.
É importante destacar, que o SOGI-PLL e o SOGI-FLL não estarão incluídos
devido as oscilações presentes em suas estimações.
Novamente, os resultados mostram uma melhoria para as versões filtradas do
SOGI-PLL. Pode-se notar que os métodos convergem corretamente ao erro de 0 rad, ex-
ceto os que apresentam oscilações em sua estimação (SOGI-PLL e SOGI-FLL), revelando
que tais métodos não são imunes a presença de componentes harmônicos.

47 4.3. Adaptabilidade em Frequência
Tabela 4.2: Comparação quantificada entre os métodos diante do segundo ce-nário
Frequência Erro de FaseTécnicas ST (ms) %OS ST (ms) OS (graus)
SOGI-MAF 34,11 1,02 34,73 1,54SOGI-OCF 28,92 1,23 15,35 0,50FLL-OCF 29,01 1,25 23,51 0,63
ST = Settling time%OS = Overshoot
O OCF exibe resultados melhores com relação a técnica MAF, alcançando con-
vergência mais rápida. Seu desempenho também é superior ao FLL, mesmo em sua
versão filtrada.
A partir do exposto, podemos inferir que o SOGI-OCF é bastante robusto frente
a distorções harmônicas e eventos desequilibrados.
4.3 Adaptabilidade em Frequência
Para avaliar o quesito adaptabilidade em frequência e testar a melhoria induzida
pela utilização da técnica MAF e OCF no SOGI-PLL foi construído um sinal de tensão
sintético em que a frequência experimenta uma mudança de passo em seu valor de 60
Hz para 65 Hz em um determinado momento. O sinal também foi contaminado com
o quinto e sétimo harmônicos. A amplitude do quinto harmônico é 1/5 da amplitude
fundamental e a do sétimo é 1/7 da fundamental.
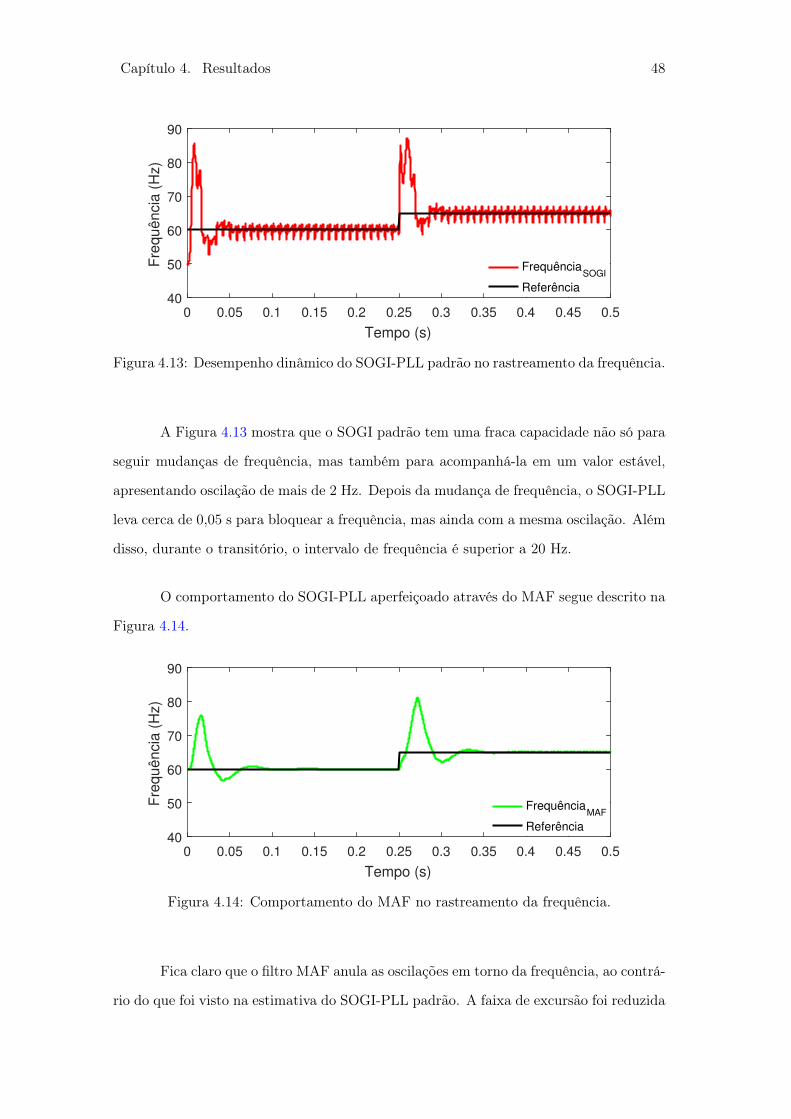
A Figura 4.13 apresenta a estimativa de frequência fundamental realizada pela
técnica SOGI-PLL padrão.
Capítulo 4. Resultados 48
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Tempo (s)
40
50
60
70
80
90
Fre
quência
(H
z)
FrequênciaSOGI
Referência
Figura 4.13: Desempenho dinâmico do SOGI-PLL padrão no rastreamento da frequência.
A Figura 4.13 mostra que o SOGI padrão tem uma fraca capacidade não só para
seguir mudanças de frequência, mas também para acompanhá-la em um valor estável,
apresentando oscilação de mais de 2 Hz. Depois da mudança de frequência, o SOGI-PLL
leva cerca de 0,05 s para bloquear a frequência, mas ainda com a mesma oscilação. Além
disso, durante o transitório, o intervalo de frequência é superior a 20 Hz.
O comportamento do SOGI-PLL aperfeiçoado através do MAF segue descrito na
Figura 4.14.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Tempo (s)
40
50
60
70
80
90
Fre
quência
(H
z)
FrequênciaMAF
Referência
Figura 4.14: Comportamento do MAF no rastreamento da frequência.
Fica claro que o filtro MAF anula as oscilações em torno da frequência, ao contrá-
rio do que foi visto na estimativa do SOGI-PLL padrão. A faixa de excursão foi reduzida
49 4.3. Adaptabilidade em Frequência
a menos de 15 Hz, no entanto, o tempo de assentamento para este método é superior ao
do SOGI padrão.
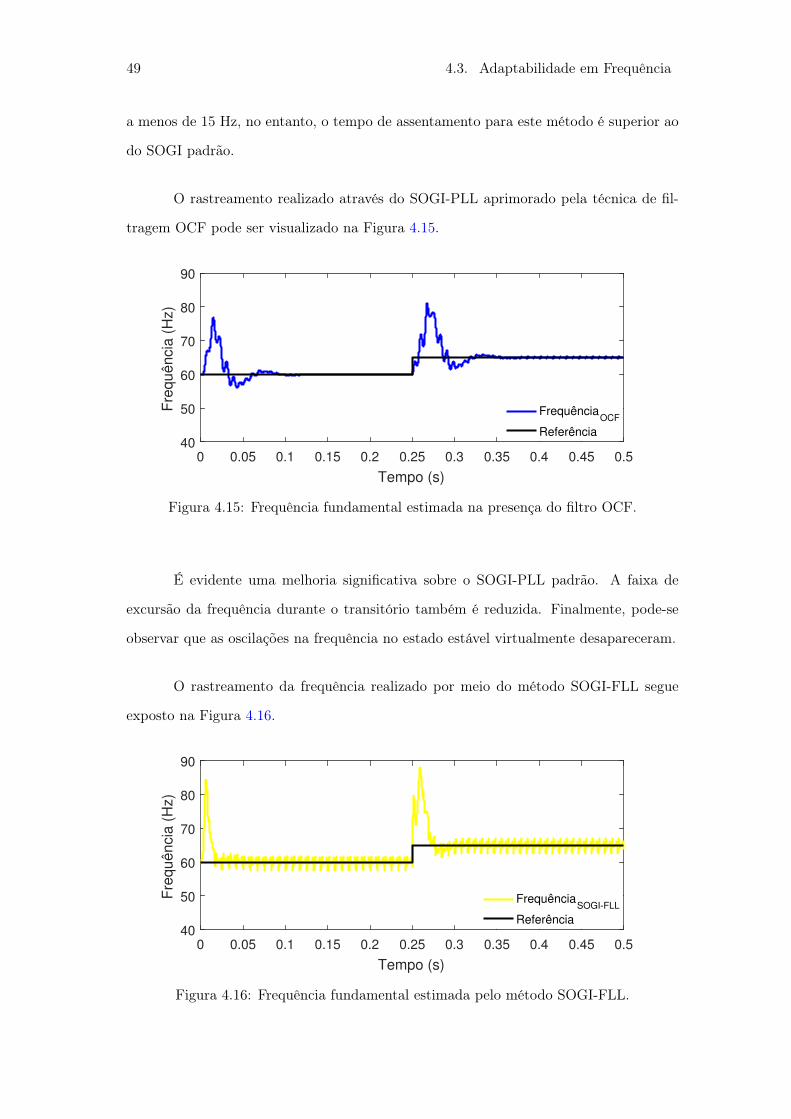
O rastreamento realizado através do SOGI-PLL aprimorado pela técnica de fil-
tragem OCF pode ser visualizado na Figura 4.15.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Tempo (s)
40
50
60
70
80
90
Fre
quência
(H
z)
FrequênciaOCF
Referência
Figura 4.15: Frequência fundamental estimada na presença do filtro OCF.
É evidente uma melhoria significativa sobre o SOGI-PLL padrão. A faixa de
excursão da frequência durante o transitório também é reduzida. Finalmente, pode-se
observar que as oscilações na frequência no estado estável virtualmente desapareceram.
O rastreamento da frequência realizado por meio do método SOGI-FLL segue
exposto na Figura 4.16.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Tempo (s)
40
50
60
70
80
90
Fre
quência
(H
z)
FrequênciaSOGI-FLL
Referência
Figura 4.16: Frequência fundamental estimada pelo método SOGI-FLL.
Capítulo 4. Resultados 50
Assim como o SOGI-PLL padrão, este método apresenta oscilações em sua esti-
mativa.
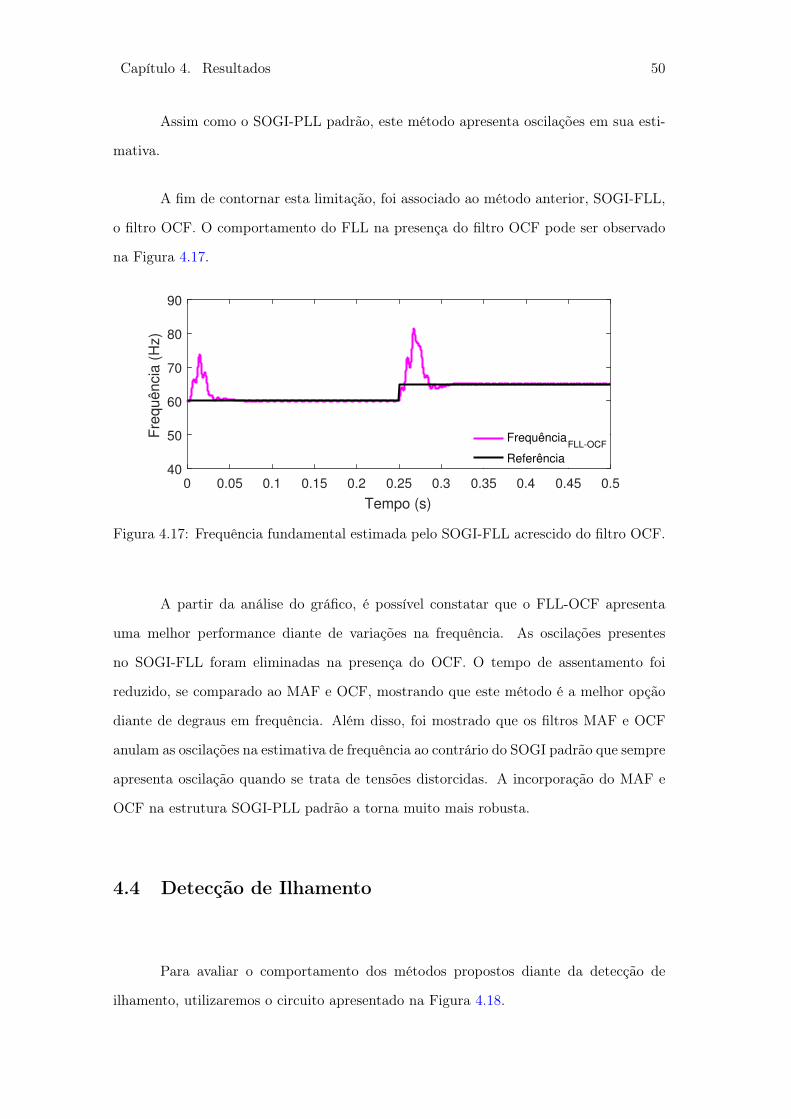
A fim de contornar esta limitação, foi associado ao método anterior, SOGI-FLL,
o filtro OCF. O comportamento do FLL na presença do filtro OCF pode ser observado
na Figura 4.17.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Tempo (s)
40
50
60
70
80
90
Fre
quência
(H
z)
FrequênciaFLL-OCF
Referência
Figura 4.17: Frequência fundamental estimada pelo SOGI-FLL acrescido do filtro OCF.
A partir da análise do gráfico, é possível constatar que o FLL-OCF apresenta
uma melhor performance diante de variações na frequência. As oscilações presentes
no SOGI-FLL foram eliminadas na presença do OCF. O tempo de assentamento foi
reduzido, se comparado ao MAF e OCF, mostrando que este método é a melhor opção
diante de degraus em frequência. Além disso, foi mostrado que os filtros MAF e OCF
anulam as oscilações na estimativa de frequência ao contrário do SOGI padrão que sempre
apresenta oscilação quando se trata de tensões distorcidas. A incorporação do MAF e
OCF na estrutura SOGI-PLL padrão a torna muito mais robusta.
4.4 Detecção de Ilhamento
Para avaliar o comportamento dos métodos propostos diante da detecção de
ilhamento, utilizaremos o circuito apresentado na Figura 4.18.
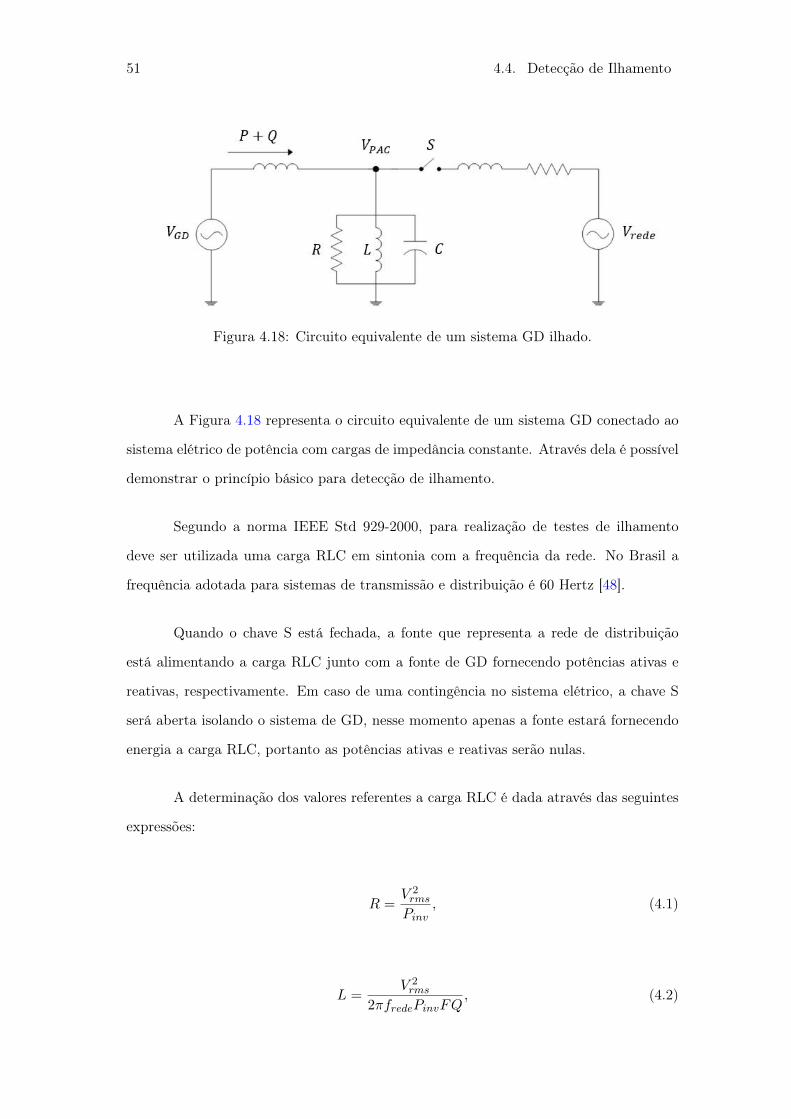
51 4.4. Detecção de Ilhamento
Figura 4.18: Circuito equivalente de um sistema GD ilhado.
A Figura 4.18 representa o circuito equivalente de um sistema GD conectado ao
sistema elétrico de potência com cargas de impedância constante. Através dela é possível
demonstrar o princípio básico para detecção de ilhamento.
Segundo a norma IEEE Std 929-2000, para realização de testes de ilhamento
deve ser utilizada uma carga RLC em sintonia com a frequência da rede. No Brasil a
frequência adotada para sistemas de transmissão e distribuição é 60 Hertz [48].
Quando o chave S está fechada, a fonte que representa a rede de distribuição
está alimentando a carga RLC junto com a fonte de GD fornecendo potências ativas e
reativas, respectivamente. Em caso de uma contingência no sistema elétrico, a chave S
será aberta isolando o sistema de GD, nesse momento apenas a fonte estará fornecendo
energia a carga RLC, portanto as potências ativas e reativas serão nulas.
A determinação dos valores referentes a carga RLC é dada através das seguintes
expressões:
𝑅 =𝑉 2𝑟𝑚𝑠
𝑃𝑖𝑛𝑣, (4.1)
𝐿 =𝑉 2𝑟𝑚𝑠
2𝜋𝑓𝑟𝑒𝑑𝑒𝑃𝑖𝑛𝑣𝐹𝑄, (4.2)
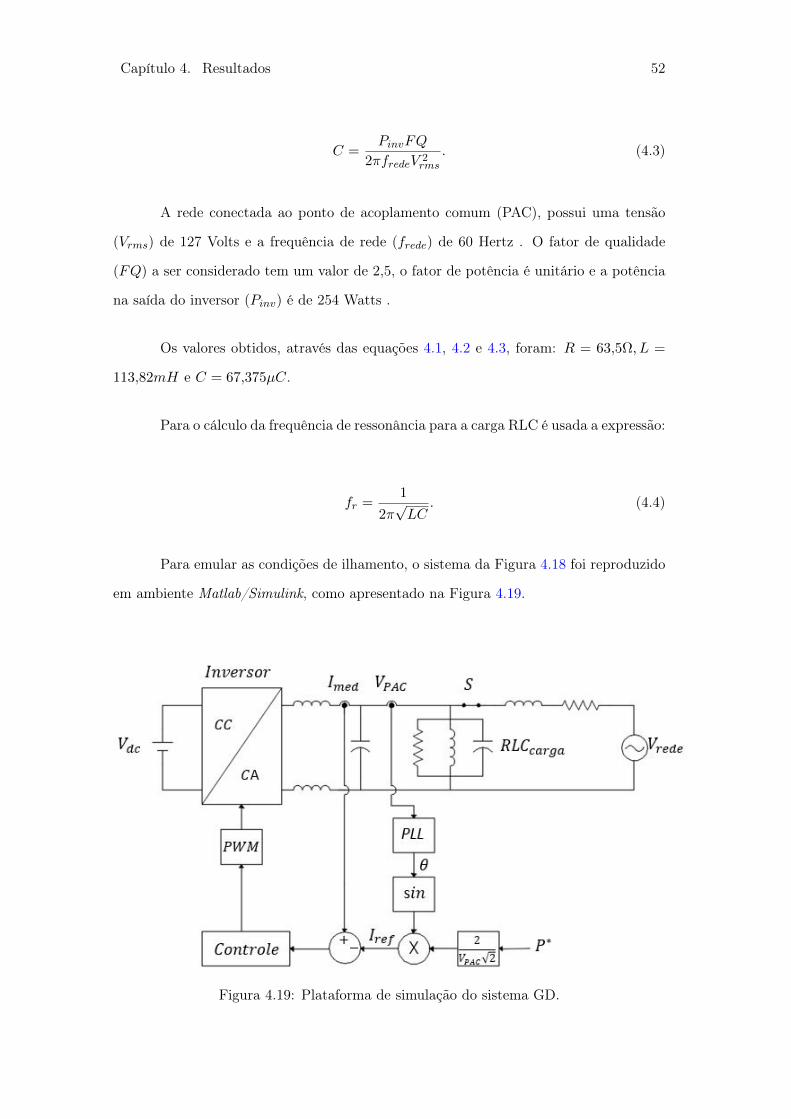
Capítulo 4. Resultados 52
𝐶 =𝑃𝑖𝑛𝑣𝐹𝑄
2𝜋𝑓𝑟𝑒𝑑𝑒𝑉 2𝑟𝑚𝑠
. (4.3)
A rede conectada ao ponto de acoplamento comum (PAC), possui uma tensão
(𝑉𝑟𝑚𝑠) de 127 Volts e a frequência de rede (𝑓𝑟𝑒𝑑𝑒) de 60 Hertz . O fator de qualidade
(𝐹𝑄) a ser considerado tem um valor de 2,5, o fator de potência é unitário e a potência
na saída do inversor (𝑃𝑖𝑛𝑣) é de 254 Watts .
Os valores obtidos, através das equações 4.1, 4.2 e 4.3, foram: 𝑅 = 63,5Ω, 𝐿 =
113,82𝑚𝐻 e 𝐶 = 67,375𝜇𝐶.
Para o cálculo da frequência de ressonância para a carga RLC é usada a expressão:
𝑓𝑟 =1
2𝜋√𝐿𝐶
. (4.4)
Para emular as condições de ilhamento, o sistema da Figura 4.18 foi reproduzido
em ambiente Matlab/Simulink, como apresentado na Figura 4.19.
Figura 4.19: Plataforma de simulação do sistema GD.

53 4.4. Detecção de Ilhamento
Para testar o desempenho do SOGI, MAF, OCF e SOGI-FLL operando em modo
ilhado, analisou-se o comportamento da frequência a partir da tensão do PAC. O sinal
de tensão segue representado na Figura 4.20.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Tempo(s)
-200
-100
0
100
200
Tensão (
V)
Figura 4.20: Sinal de tensão no PAC.
A frequência estimada pelos métodos propostos pode ser observada na Figura
4.21 e Figura 4.22.
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Tempo (s)
57
58
59
60
61
Fre
quência
(H
z)
fSOGI
fMAF
fOCF
Figura 4.21: Frequência estimada pelo SOGI padrão, MAF e OCF.
É possível observar que em 0,2s ocorre um transitório devido a abertura da chave,
onde o sistema passa a operar em modo ilhado, após a estabilização a nova frequência
será a frequência de ressonância da carga RLC, obtida por meio da equação 4.4, 𝑓𝑟 = 57,5
Hz .

Capítulo 4. Resultados 54
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Tempo (s)
57
58
59
60
61
Fre
quência
(H
z)
fSOGI-FLL
fFLL-OCF
fOCF
Figura 4.22: Frequência estimada pelos métodos SOGI-FLL e FLL-OCF em comparaçãocom o OCF.
Observando os gráficos acima, é possível notar que em diversos momentos ocorre
sobreposição das técnicas, mostrando que todos os métodos convergem para o novo valor
da frequência teórica calculada, tendo desempenhos muito semelhantes.
4.5 Resultados Experimentais
Com objetivo de validar os resultados de simulação, os métodos propostos foram
testados experimentalmente.
A montagem experimental é composta pelo módulo de testes da Texas Instru-
ments, referenciado como TMDSHV1PHINVKIT. Este kit consta de um inversor mono-
fásico e é controlado pelo DSP TMS320F28335. Conta-se com a presença de uma fonte
auxiliar, que neste caso é uma fonte CC ajustável, necessária para alimentar os circuitos
de condicionamento do inversor. Dispõe-se também de um circuito dobrador de tensão,
que tem por finalidade retificar a tensão alternada proveniente do variac, e elevá-la ao
patamar de 400 V em corrente contínua. O varivolt (variac), é utilizado para que este
valor de tensão contínua, que será aplicado à entrada CC do inversor, seja ajustado aos
poucos, com mais segurança e precisão. Por fim, o transformador isolador que é a inter-
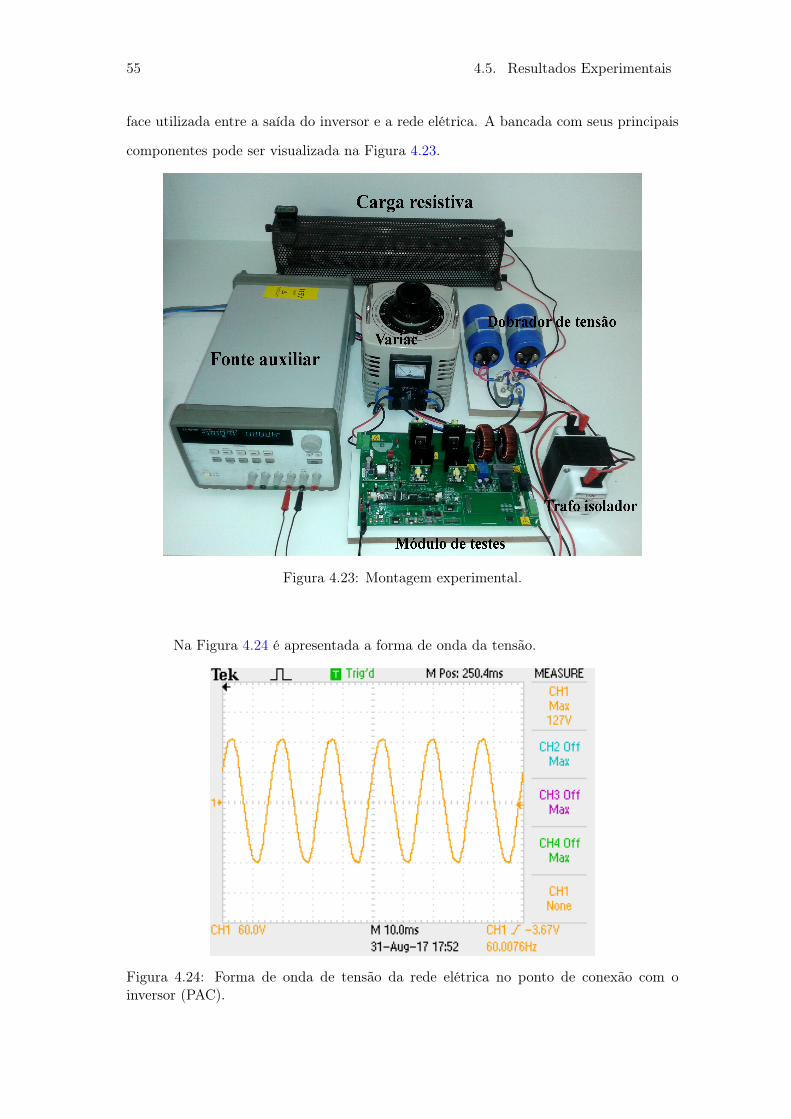
55 4.5. Resultados Experimentais
face utilizada entre a saída do inversor e a rede elétrica. A bancada com seus principais
componentes pode ser visualizada na Figura 4.23.
Figura 4.23: Montagem experimental.
Na Figura 4.24 é apresentada a forma de onda da tensão.
Figura 4.24: Forma de onda de tensão da rede elétrica no ponto de conexão com oinversor (PAC).

Capítulo 4. Resultados 56
Este sinal de tensão contém apenas harmônicos existentes na própria rede no
momento da medição. As técnicas avaliadas nas seções anteriores são aqui analisadas
experimentalmente.
Ao importarmos a forma de onda da tensão do osciloscópio para o Matlab obti-
vemos o sinal no PAC representado na Figura 4.25.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Tempo(s)
-150
-100
-50
0
50
100
150
Tensão (
V)
Figura 4.25: Tensão do PAC importada para o Matlab.
A frequência estimada pelos métodos SOGI-PLL, SOGI-MAF e SOGI-OCF está
exposta na Figura 4.26.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Tempo (s)
20
40
60
80
100
120
140
Fre
quência
(H
z)
fSOGI
fMAF
fOCF
Figura 4.26: Frequência estimada pelos métodos SOGI, MAF e OCF.
A estimação da frequência através dos métodos SOGI-FLL e FLL com filtro OCF
segue representada na Figura 4.27.
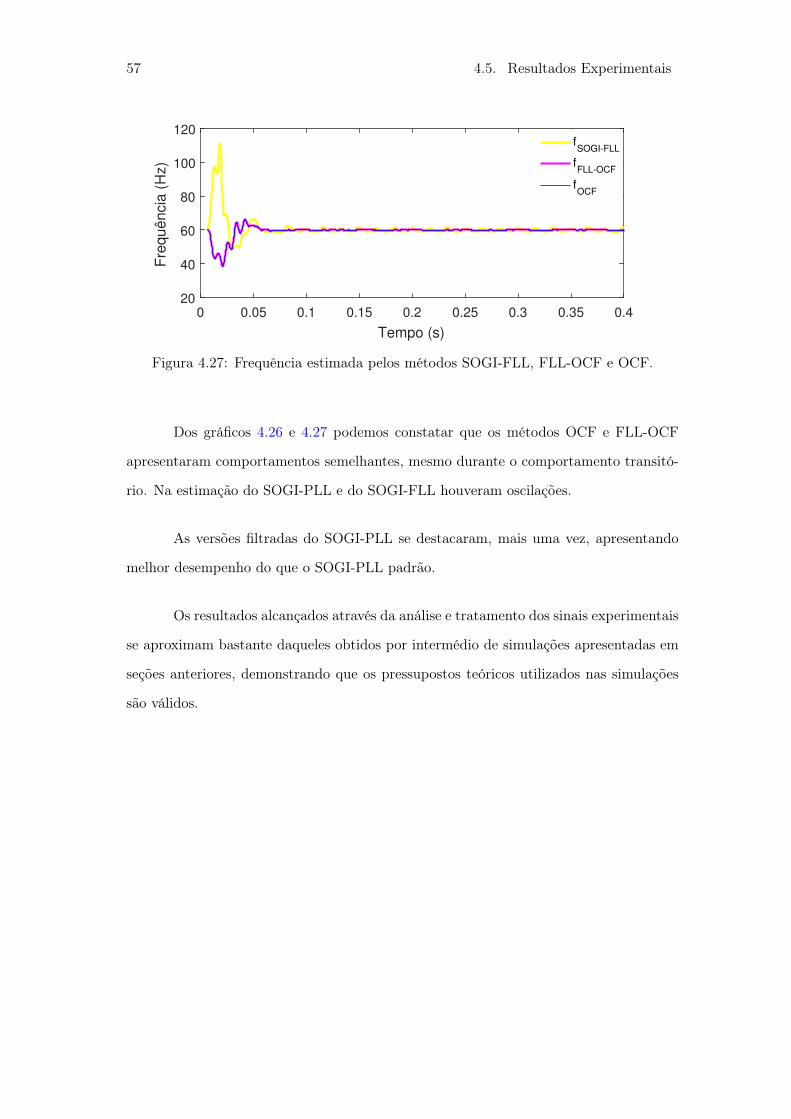
57 4.5. Resultados Experimentais
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Tempo (s)
20
40
60
80
100
120
Fre
quência
(H
z)
fSOGI-FLL
fFLL-OCF
fOCF
Figura 4.27: Frequência estimada pelos métodos SOGI-FLL, FLL-OCF e OCF.
Dos gráficos 4.26 e 4.27 podemos constatar que os métodos OCF e FLL-OCF
apresentaram comportamentos semelhantes, mesmo durante o comportamento transitó-
rio. Na estimação do SOGI-PLL e do SOGI-FLL houveram oscilações.
As versões filtradas do SOGI-PLL se destacaram, mais uma vez, apresentando
melhor desempenho do que o SOGI-PLL padrão.
Os resultados alcançados através da análise e tratamento dos sinais experimentais
se aproximam bastante daqueles obtidos por intermédio de simulações apresentadas em
seções anteriores, demonstrando que os pressupostos teóricos utilizados nas simulações
são válidos.

Capítulo 5
Conclusão
Nesta dissertação foi proposta uma investigação para melhorar o desempenho do
SOGI-PLL na estimativa de fase e frequência diante de tensões distorcidas e flutuantes.
Verificou-se através de revisões bibliográficas e simulações que a técnica de sincronização
convencional pode fornecer referências inadequadas de frequência e fase em condições
anormais de operação da rede elétrica.
Portanto, duas técnicas de filtragem foram incorporadas ao SOGI-PLL padrão: o
filtro de média móvel e o algoritmo de Fourier de um ciclo. Foi demonstrado que as duas
técnicas podem ser obtidas com uma interpretação de filtragem através da transformada
discreta de Fourier.
O filtro MAF foi aplicado as tensões 𝑑𝑞 síncronas e o OCF nas tensões estacio-
nárias 𝛼𝛽. Além disso, comparamos as técnicas propostas com um aperfeiçoamento do
SOGI padrão que é bastante difundido, o SOGI-FLL.
Os resultados mostraram que o SOGI-OCF na maioria dos casos, tem um desem-
penho melhor do que o SOGI-MAF ou SOGI-PLL padrão. O SOGI-FLL, por sua vez,
mostrou não ser robusto sob condições desequilibradas, sua versão filtrada (FLL-OCF)
apresentou comportamento semelhante ao SOGI-OCF.
Capítulo 5. Conclusão 60
O filtro OCF anula as oscilações na estimativa de frequência realizada ao contrário
do SOGI padrão que sempre apresenta oscilação quando se trata de tensões distorcidas.
Mostrou-se também uma redução no tempo de estabilização da frequência, este tempo
é significativamente reduzido com a incorporação do filtro OCF na estrutura SOGI,
melhorando seu desempenho transitório.
Quando ocorrem saltos de frequência, o método FLL-OCF foi o que se mostrou
mais promissor, apresentando menor tempo de acomodação e sobressinal.
No último capítulo, no qual os resultados simulados e experimentais são apre-
sentados, a incorporação dos filtros demonstrou aumentar a robustez do SOGI padrão
frente a situações adversas de operação da rede, devido a capacidade de tais métodos em
rejeitar componentes desbalanceados, harmônicos e saltos de frequência.
5.1 Propostas para Trabalhos Futuros
As principais sugestões de melhoria futura deste trabalho estão associadas a:
• Comparar os resultados obtidos com outras técnicas monofásicas;
• Aplicar a abordagem recursiva do filtro de Fourier e comparar o seu desempenho
diante do OCF aqui exposto;
• Aplicar técnicas de pré-filtragem;
• Eliminar a realimentação do SOGI-PLL aplicando o método de Prony para estimar
a frequência.
Referências Bibliográficas
[1] S.E. Li, Q. Guo, L. Xin, B. Cheng, and K. Li. Fuel-saving servo-loop control for an
adaptive cruise control system of road vehicles with step-gear transmission. IEEE
Trans. Veh. Technol., 66:2033–2043, 2017.
[2] J. von Appen, M. Braun, K. Diwold, D. Geibel, and T. Stetz. Time in the sun.
IEEE Trans. Power Deliv., 11:55–64, March/April 2013.
[3] S. Sumathi, L.A. Kumar, and P. Surekha. Solar PV and wind energy conversion
systems. Springer, India 2015.
[4] M. L. Ribeiro. Estratégia de reposição de serviço utilizando micro redes. Master’s
thesis, Universidade do Porto, Curso de Pós-Graduação em Engenharia Elétrica,
Portugal, 2010.
[5] L. F. Gonçalves. Contribuições para o estudo teórico e experimental de sistemas de
geração distribuída. Master’s thesis, Universidade Federal do Rio Grande do Sul,
Curso de Pós-Graduação em Engenharia Elétrica, Porto Alegre, 2004.
[6] S. Golestan, J. M. Guerrero, and J. C. Vasquez. Single-phase PLLs: A review of
recent advances. IEEE Trans. Power Electron., 32, Dec. 2017.
[7] N. J. S. G. Cabete. Elaboração de procedimentos e critérios para definição de limites
de elegibilidade de aceitação de produção renovável em redes isoladas. Master’s
thesis, Universidade do Porto, Curso de Pós-Graduação em Engenharia Elétrica,
Portugal, 2003.

Referências Bibliográficas 62
[8] Y. Han, M. Luo, X. Zhao, J. M. Guerrero, and L. Xu. Comparative performance
evaluation of orthogonal-signal-generators-based single-phase PLL algorithms — a
survey. IEEE Trans. Power Deliv., 31:3932–3942, May 2016.
[9] F. Xiao, L. Dong, L. Li, and X. Liao. A frequency-fixed SOGI-based PLL for single-
phase grid-connected converters. IEEE Trans. Power Electron., 32:1713–1719, 2017.
[10] M. Ciobotaru, R. Teodorescu, and F. Blaabjerg. A new single-phase PLL structure
based on second order generalized integrator. Proc. IEEE Power Electron. Spec.
Conf., 37:1511–1516, Jun. 2006.
[11] R. S. Silva. Desempenho de geradores distribuídos durante curtos-circuitos consi-
derando requisitos de suportabilidade a afundamentos de tensão. Master’s thesis,
Universidade Estadual de Campinas - UNICAMP, Campinas, 2012.
[12] S. Golestan, J. M. Guerrero, A. Vidal, A.G. Yepes, and J. D. Gandoy. PLL with
MAF-based prefiltering stage: Small-signal modeling and performance enhance-
ment. IEEE Trans. Power Electron., 31:4013–4019, 2016.
[13] M. Karimi-Guartemani. Phase-locked loop structures for power and energy applica-
tions. IEEE-Press-Wiley, 2014.
[14] M. Liserre R. Teodorescu and P. Rodriguez. Grid converters for photovoltaic and
wind power systems. IEEE-Press-Wiley, 2011.
[15] M. S. Padua. Técnicas digitais para sincronização com a rede elétrica, com aplicação
em geração distribuída. Master’s thesis.
[16] F.D. Freijedo, J. Doval-Gandoy, O. Lopez, and E. Acha. Tuning of phase locked
loops for power converters under distorted utility conditions. IEEE Trans. Ind.
Appl., 45, Dec. 2009.
[17] R. M. Santos Filho, P. F. Seixas, P. C. Cortizo, L. A. B. Torres, and A. F. Souza.
Comparison of three single-phase PLL algorithms for UPS applications. IEEE
Trans. Ind. Electron., 55, Aug. 2008.
63 Referências Bibliográficas
[18] F. D. Freijedo, J. Doval-Gandoy, O. Lopez, and C. Jacobo. Robust phase locked
loops optimized for DSP implementation in power quality applications. Proc. IEEE
34th Annu. Conf. Ind. Electron. Soc., page 2390–2395, Nov. 2008.
[19] F. Gonzalez-Espin, E. Figueres, and G. Garcera. An adaptive synchronous-
reference-frame phase-locked loop for power quality improvement in a polluted uti-
lity grid. IEEE Trans. Ind. Electron., 59:2718–2731, Jun. 2012.
[20] S. Eren. Modifying the three-phase synchronous reference frame phase-locked loop
to remove unbalance and harmonic errors. Master’s thesis, Queens University, Kings-
ton, Canada, Nov., 2008.
[21] A. Elrayyah, Y. Sozer, and M. Elbuluk. Robust phase locked-loop algorithm for
single-phase utility-interactive inverters. IET Power Electron., 7:1064–1072, May
2014.
[22] M. A. Perez, J. R. Espinoza, L. A. Moran, M. A. Torres, and E. A. Araya. A robust
phase-locked loop algorithm to synchronize static-power converters with polluted
AC systems. IEEE Trans. Ind. Electron., 55:2185–2192, May 2008.
[23] S. Golestan, M. Ramezani, J. M. Guerrero, F. D. Freijedo, and M. Monfared. Moving
average filter based phase-locked loops: Performance analysis and design guidelines.
IEEE Trans. Power. Electron., 29:2750–2763, Jun. 2014.
[24] I. Carugati, P. Donato, S. Maestri, D. Carrica, and M. Benedetti. Frequency
adaptive PLL for polluted single-phase grids. IEEE Trans. Power. Electron.,
27:2396–2404, May 2012.
[25] L. Liu, H. Li, Z. Wu, and Y. Zhou. A cascaded photovoltaic system integrating
segmented energy storages with self-regulating power allocation control and wide
range reactive power compensation. IEEE Trans. Power Electron., 26:3545–3559,
Dec. 2011.
[26] J. Rohten et al. Discrete synchronism methods for polluted single phase and unba-
lanced three-phase systems. Proc. IEEE Int. Symp. Ind. Electron., page 1347–1352,
Oct. 2012.
Referências Bibliográficas 64
[27] S. Golestan, M. Monfared, F. D. Freijedo, and J. M. Guerrero. Design and tuning
of modified power-based PLL for single-phase grid-connected power conditioning
systems. IEEE Trans. Power. Electron., 27:3639–3650, Aug. 2012.
[28] T. Thacker, D. Boroyevich, R. Burgos, and F. Wang. Phase-locked loop noise
reduction via phase detector implementation for single-phase systems. IEEE Trans.
Ind. Electron., 58:2482–2490, Jun. 2011.
[29] C. Subramanian and R. Kanagaraj. Single-phase grid voltage attributes tracking
for the control of grid power converters. IEEE Trans. Power Electron., 2:1041–1048,
Jul. 2014.
[30] D. Dong, D. Boroyevich, and I. Cvetkovic. A high-performance single phase-locked
loop with fast line-voltage amplitude tracking. IEEE 26th Annu. Conf. Applied
Power and Electron., page 1622–1628, Mar. 2011.
[31] R. J. Ferreira, R. E. Araujo, and J. A. P. Lopes. A comparative analysis and
implementation of various PLL techniques applied to single-phase grids. Proc. IEEE
3rd Int. Youth Conf. Energetics., page 1–8, Jul. 2011.
[32] S. M. Silva, B. M. Lopes, J. C. Filho, R. P. Campana, and W. C. Boaventura.
Performance evaluation of PLL algorithms for single-phase grid-connected systems.
Proc. Ind. Appl. Conf., 4:2259–2263, Oct. 2004.
[33] L. Tong, X. Zou, S. Feng, Y. Chen, Q. Huang Y. Kang, and Y. Huang. An SRF-
PLL-based sensor less vector control using the predictive deadbeat algorithm for the
direct-driven permanent magnet synchronous generator. IEEE Trans. Ind. Electron.,
29:2837–2849, 2014.
[34] P. Lamo, F. Lopez, Alberto Pigazo, and F.J. Azcondo. An efficient FPGA imple-
mentation of a quadrature signal-generation subsystem in SRF PLLs in single-phase
PFCs. IEEE Trans. Ind. Electron., 32:3959–3969, 2017.
[35] S. Golestan, M. Ramezani, and J. M. Guerrero. DQ-frame cascaded delayed sig-
nal cancellation-based PLL: Analysis, design, and comparison with moving average
filter-based PLL. IEEE Trans. Ind. Electron., 30:1618–1632, Mar. 2015.

65 Referências Bibliográficas
[36] M.Monfared S. Golestan and, F. D. Freijedo, and J.M. Guerrero. Dynamics as-
sessment of advanced single-phase PLL structures. IEEE Trans. Ind. Electron.,
60:2167–2177, Jun. 2013.
[37] M. Ciobotaru, R. Teodorescu, and F. Blaabjerg. A new single-phase PLL structure
based on second order generalized integrator. Proc. 37th IEEE Power Electron.
Spec. Conf., page 1511–1516, Jun. 2006.
[38] F. Xiao, L. Dong, L. Li, and X. Liao. A frequency-fixed SOGI-based PLL for single-
phase grid-connected converters. IEEE Trans. Power Electron., 32:1713–1719, Mar.
2017.
[39] M. S. Reza, M. Ciobotaru, and V. G. Agelidis. Accurate estimation of single-
phase grid voltage parameters under distorted conditions. IEEE Trans. Power Del.,
29:1138–1146, Jun. 2014.
[40] Q. C. Zhong and T. Hornik. Control of power inverters in renewable energy and
smart grid integration. John Wiley Sons, 2013.
[41] Rodriguez RTP., Luna A., Ciobotaru M., and Blaabjerg F. Advanced grid synch-
ronization system for power converters under unbalanced and distorted operating
conditions. IEEE Ind. Electron IECON, page 5173–8, 2006.
[42] Rodriguez FBP., Luna A., Muñoz-Aguilar RS., Etxeberria-Otadui I., and Teodo-
rescu R. A stationary reference frame grid synchronization system for three-phase
grid connected power converters under adverse grid conditions. IEEE Trans. Power
Electron., page 99–112, 2012.
[43] Rodriguez P., Luna A., Candela I., Teodorescu R., and Blaabjerg F. Grid synch-
ronization of power converters using multiple second order generalized integrators.
In Proceedings of the IEEE Industrial Electronics Conference (IECON’08), page
755–760, 2008.
[44] S. Golestan, Josep M. Guerrero, Ana Vidal, Alejandro G. Yepes, and Jesus Doval-
Gandoy. PLL with MAF-based prefiltering stage: Small-signal modeling and per-
formance enhancement. IEEE Trans. Power Electron., 31:1138–1146, 2016.
Referências Bibliográficas 66
[45] P. F. Ribeiro, P. M. da Silveira, C. A. Duque, and A. S. Cerqueira. Power systems
signal processing for smart grids. John Wiley and Sons, 2014.
[46] Timbus A., Liserre M., Teodorescu R., and Blaabjerg F. Synchronization methods
for three phase distributed power generation systems. an overview and evaluation.
Proceedings of the IEEE 36th conference on power electronics specialists 2005, page
2474–2081, 2005.
[47] R. Dorf and R. Bishop. Modern control systems. A. Weasley, Ed., 2010.
[48] IEEE STD 929. IEEE std 929-2000 IEEE recommended practice for utility interface
of photovoltaic PV systems. IEEE, 2000.
Related Documents











