Platzhalter für Bild, Bild auf Titelfolie hinter das Logo einsetzen Algorithms for Robot Navigation: From Optimizing Individual Robots to Particle Swarms Aaron Becker, Erik Demaine, Maximilian Ernestus, Sándor P. Fekete, Golnaz Habibi, Michael Hemmer, Alexander Kröller, Dominik Krupke, Seoung Kyou Lee, James McLurkin, Rose Morris-Wright, Christiane Schmidt

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Platzhalter für Bild, Bild auf Titelfolie hinter das Logo einsetzen
Algorithms for Robot Navigation: From Optimizing Individual Robots to Particle Swarms
Aaron Becker, Erik Demaine, Maximilian Ernestus, Sándor P. Fekete, Golnaz Habibi,
Michael Hemmer, Alexander Kröller, Dominik Krupke, Seoung Kyou Lee, James McLurkin,
Rose Morris-Wright, Christiane Schmidt
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
Preface: Processors and Mobile Objects
2
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
Processors
3
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
Mobile Systems and Robots
4
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
Algorithms
5
1. Algorithms for NP-hard problems
2. Algorithms for problems with incomplete information
3. Distributed algorithms
4. Algorithms for programmable matter
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
Part 1: Exploration with a Single Robot
6
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
7
Video!
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
7
Video!
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
Part 2: Exploration with a Robot Swarm
8
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
9
Video!
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
9
Video!
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
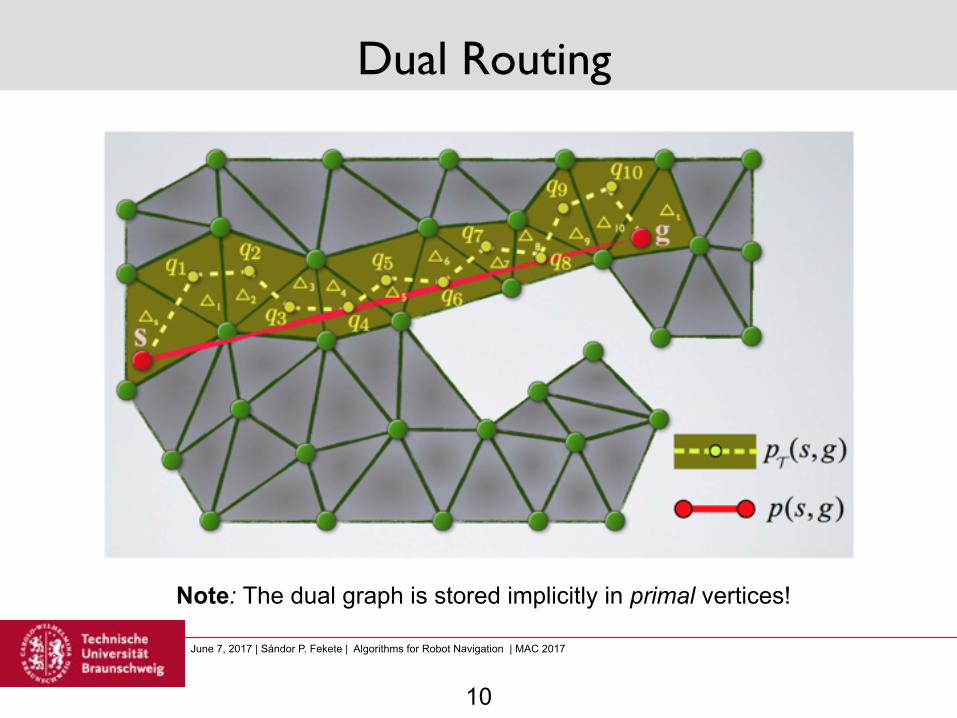
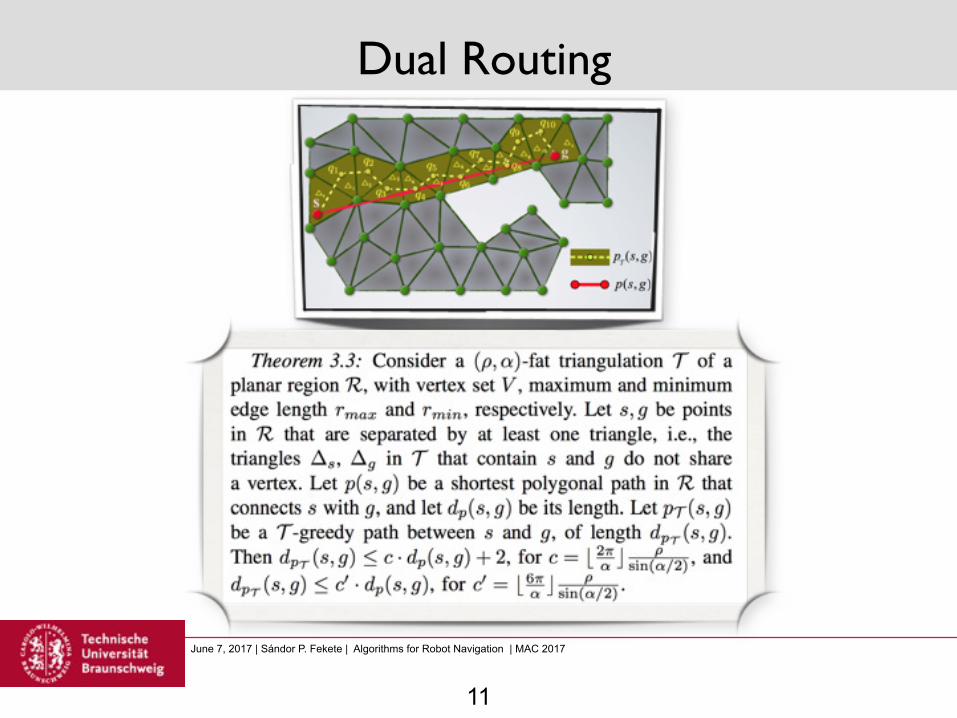
Dual Routing
10
Note: The dual graph is stored implicitly in primal vertices!
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
Dual Routing
11
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
Part 3: Distributed Cohesive Control
12
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
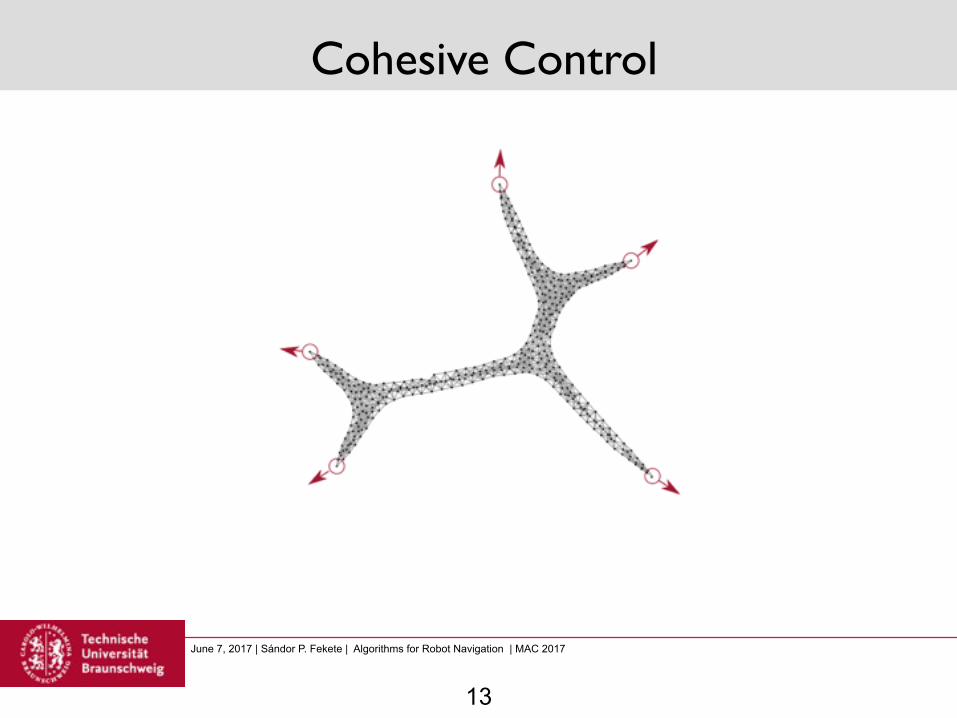
Cohesive Control
13
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
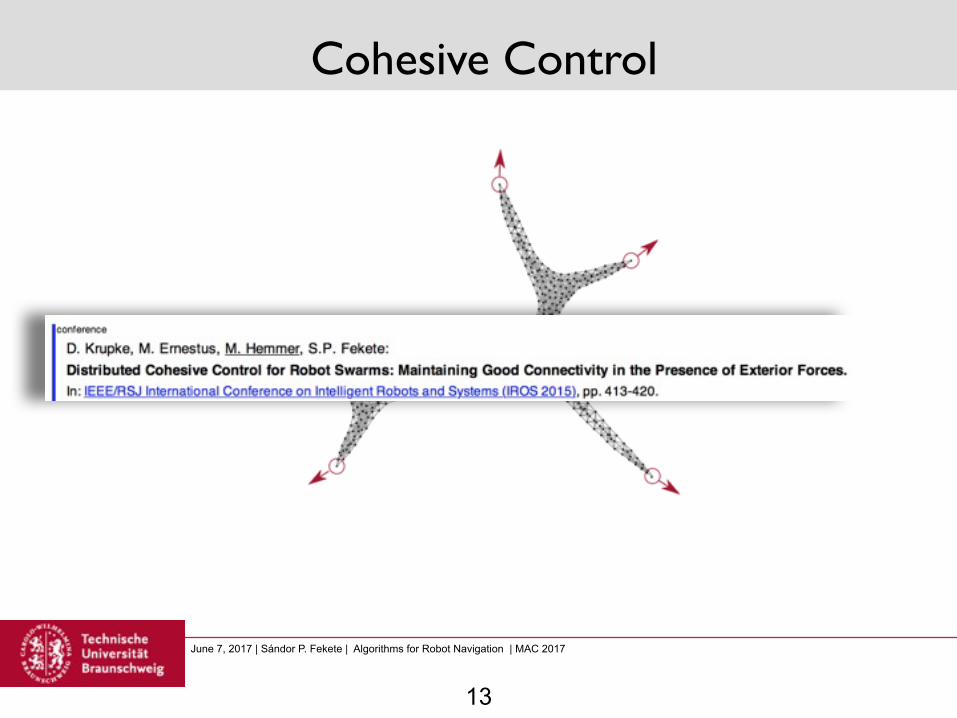
Cohesive Control
13
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
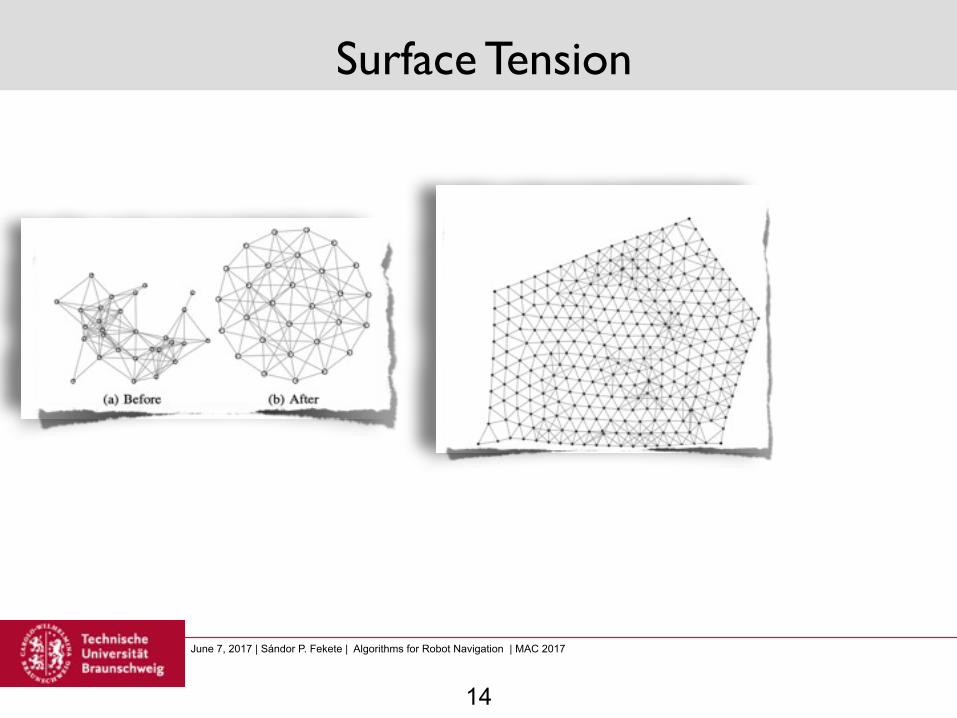
Surface Tension
14
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
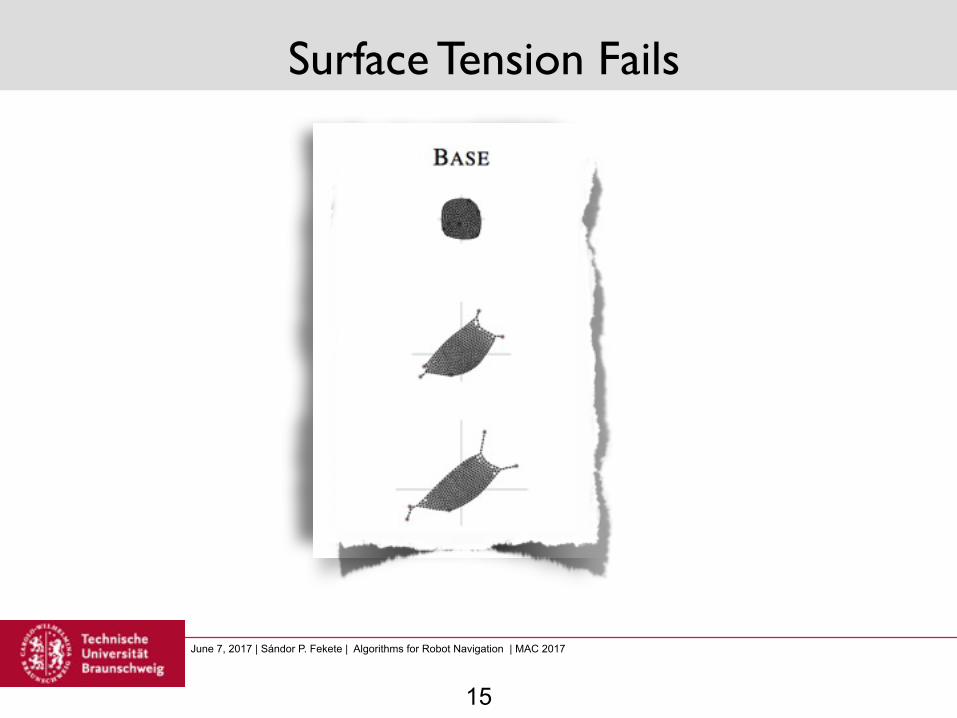
Surface Tension Fails
15
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
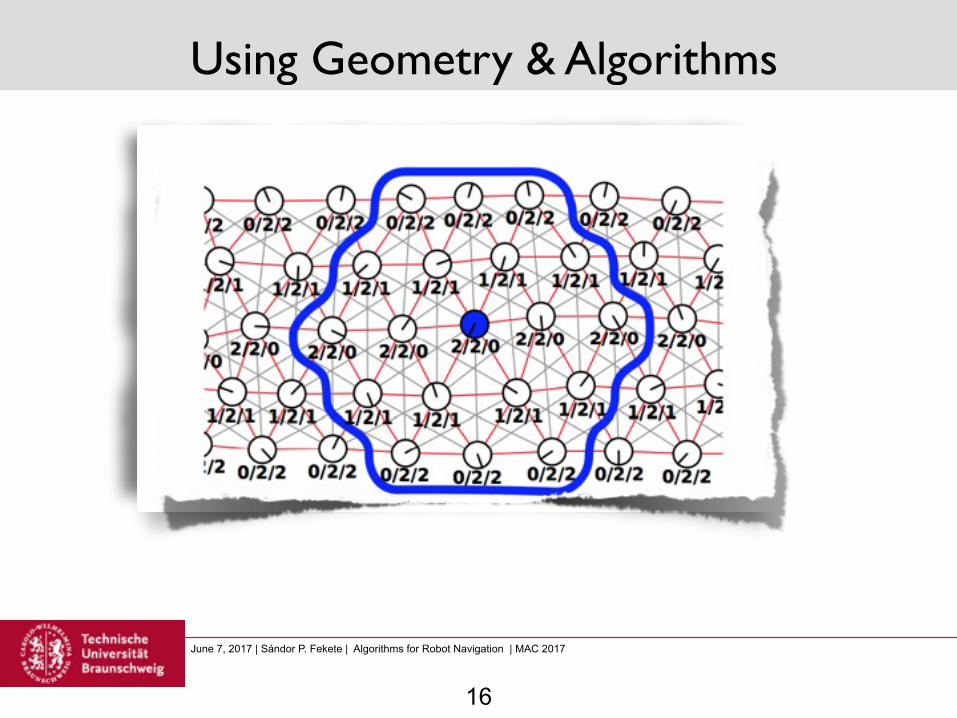
Using Geometry & Algorithms
16
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
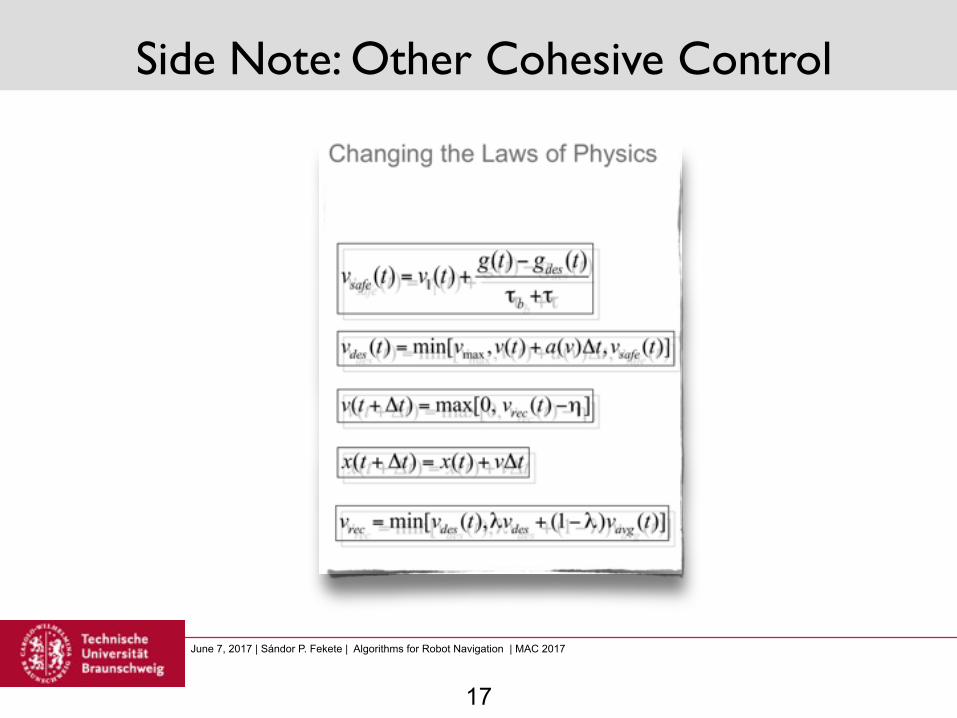
Side Note: Other Cohesive Control
17
„Houston, you have a problem!“
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
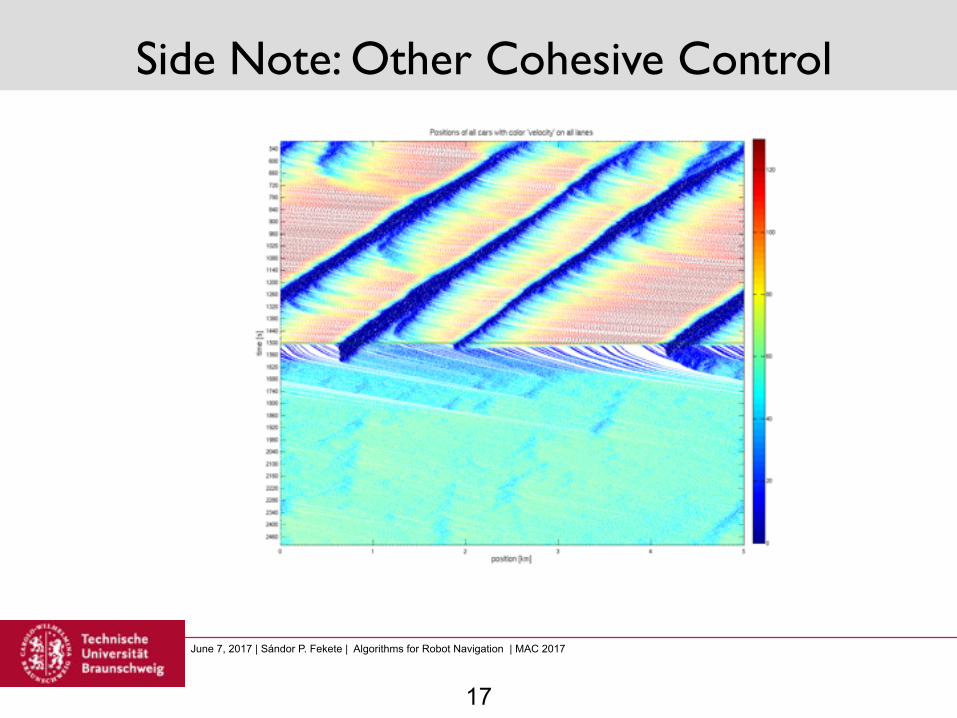
Side Note: Other Cohesive Control
17
„Houston, you have a problem!“
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
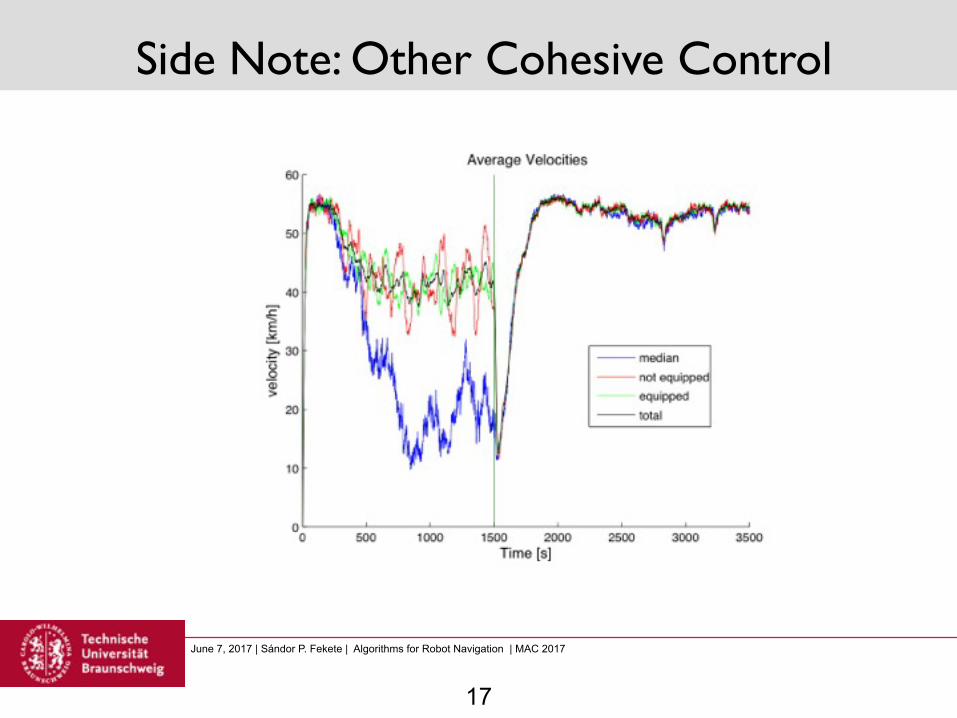
Side Note: Other Cohesive Control
17
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
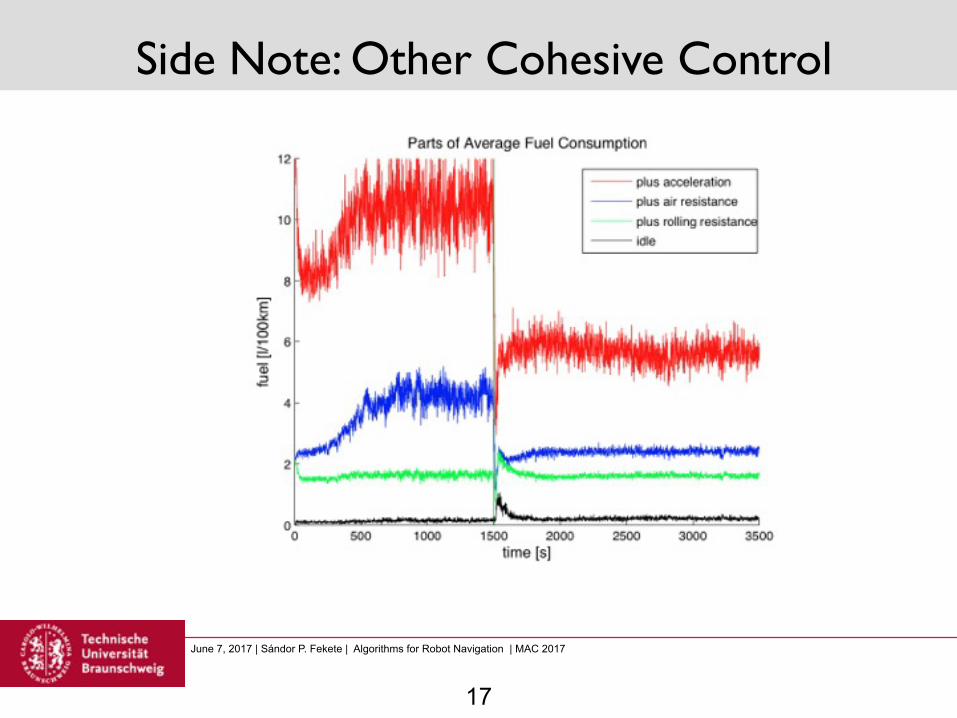
Side Note: Other Cohesive Control
17
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
Side Note: Other Cohesive Control
17
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
Side Note: Other Cohesive Control
17
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
Side Note: Other Cohesive Control
17
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
Side Note: Other Cohesive Control
17
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
Side Note: Other Cohesive Control
17
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
Side Note: Other Cohesive Control
17
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
Part 4: Controlling Massive Particle Swarms
18

June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
Moving Small Objects
19
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
Video!
20
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
Video!
20
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
Conclusions
21
• There has been amazing progress in robotics and distributed systems.
• Distributed mobile systems come in many sizes and numbers.
• Putting these systems to good use is not “a mere matter of engineering”, but requires a combination of systems control with algorithmics.
• Just because the algorithmic problems are difficult, you don’t have to give up on smart algorithmic methods.
• If you’re an engineer: Talk to algorithms people!
• If you’re a computer scientist: Talk to engineers!
June 7, 2017 | Sándor P. Fekete | Algorithms for Robot Navigation | MAC 2017
22
Thank you!
Related Documents











