SENAM VITALISASI OTAK TIDAK MEMBERI MANFAAT SIGNIFIKAN TERHADAP PENINGKATAN STABILITAS PERGELANGAN KAKI PADA PEREMPUAN DEWASA MUDA Weeke Budhyanti Akademi Fisioterapi Universitas Kristen Indonesia Jl. Mayjen Sutoyo, Cawang, Jakarta Timur 13630 021-8092425 ext 381 [email protected] ABSTRACT Objective: to know the benefits of brain gym to the stability of the ankle in young adult women. Sample: consists of 15 people aged 19-29 years and were selected by purposive sampling technique. Methods: A quasi-experimental to find out the benefits of gymnastics vitalization of the brain to increase the stability of the ankle in young adult women. Data’s normality tested by the Kolmogorov-Smirnov statistical analysis. Results: Using the Wilcoxon test statistic P value obtained was 0.12 while P <α (α = 0.05) meanings that the increase of ankle stabilization period by brain gymnastics were not significant. Conclusion: There was no significant increase in the stability of the ankle through the vitalization of the brain gymnastics.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

SENAM VITALISASI OTAK TIDAK MEMBERI MANFAATSIGNIFIKAN TERHADAP PENINGKATAN STABILITASPERGELANGAN KAKI PADA PEREMPUAN DEWASA
MUDA
Weeke BudhyantiAkademi Fisioterapi Universitas Kristen IndonesiaJl. Mayjen Sutoyo, Cawang, Jakarta Timur 13630
021-8092425 ext [email protected]
ABSTRACTObjective: to know the benefits of brain gym to the stability of the ankle in young adult women.Sample: consists of 15 people aged 19-29 years and were selected by purposive samplingtechnique. Methods: A quasi-experimental to find out the benefits of gymnastics vitalization ofthe brain to increase the stability of the ankle in young adult women. Data’s normality tested bythe Kolmogorov-Smirnov statistical analysis. Results: Using the Wilcoxon test statistic P valueobtained was 0.12 while P <α (α = 0.05) meanings that the increase of ankle stabilization period bybrain gymnastics were not significant. Conclusion: There was no significant increase in thestability of the ankle through the vitalization of the brain gymnastics.

ABSTRAKTujuan Penelitian: untuk mengetahui manfaat dari senam vitalisasi otak terhadap nilai stabilitaspergelangan kaki pada perempuan dewasa muda. Sampel: terdiri dari 15 orang berusia 19-29tahun dan dipilih berdasarkan teknik purposive sampling. Metode: Merupakan jenis penelitianquasi eksperimental untuk mengetahui manfaat senam vitalisasi otak untuk meningkatkanstabilitas pergelangan kaki pada perempuan dewasa muda. Untuk uji normalitas menggunakananalisa statistik Kolmogorov-Smirnov. Hasil: Menggunakan uji statistic Wilcoxon didapatkannilai P adalah 0.12 dimana P < α (α = 0.05) yang bermakna peningkatan nilai rentang waktustabilisasi pergelangan oleh senam vitalisasi otak tidak signifikan. Kesimpulan: Tidak terjadipeningkatan yang signifikan pada stabilitas pergelangan kaki melalui senam vitalisasi otak.
PendahuluanStabilitas pergelangan kaki adalah interaksi antara mekanisme statis dan dinamis.
Pada individu yang lahir normal tanpa kelainan kongruensi tulang atau gangguan
ligamen, instabilitas dapat terjadi akibat beberapa hal. Pada perempuan muda, terjadinya
instabilitas dapat terjadi tanpa inisiasi cedera karena mekanisme mekanoreseptor dan
aktivasi neuromuskular yang berbeda serta adanya kecenderungan joint laxity secara
normatif.
Instabilitas fungsional pergelangan kaki secara empiris ditemukan membuat
banyak perempuan muda mengeluhkan kakinya “selip” atau “terpeleset” tanpa penyebab
yang jelas. Pada tuntutan aktifitas yang lebih tinggi, instabilitas fungsional meningkatkan
resiko cedera pergelangan kaki, sebagaimana yang terjadi pada atlet perempuan.
Latihan untuk meningkatkan input propriosepsi, mengaktivasi sistem
neuromuskular dan mere-edukasi postur dibutuhkan untuk memperbaiki kondisi ini.
Latihan propriosepsi dan aktivasi sistem neuromuskular pada prinsipnya adalah latihan
yang dilakukan pada berbagai arah dan kecepatan gerak, sehingga akan menimbulkan
stimulus pada mekanoresptor; dan dalam tempo yang lambat, sehingga memberi
kesempatan kepada nuclei subkortikal memberi umpan balik kepada CPG; dan pada
gilirannya mere-edukasi sistem neuromuskular untuk terjadinya aktivasi ko-kontraksi
yang benar. Senam vitalisasi otak memenuhi kebutuhan ini dan dengan demikian dapat
digunakan untuk meningkatkan stabilitas pergelangan kaki.
Senam akan dilakukan dalam 16 kali pertemuan dengan frekuensi 4 kali
seminggu yang diharapkan akan memberi hasil yang signifikan.
Stabilitas Pergelangan KakiDengan merangkumkan berbagai definisi mengenai stabilitas, maka peneliti
menyatakan bahwa stabilitas pergelangan kaki adalah kemampuan untuk
mempertahankan posisi sendi baik pada saat menumpu statis maupun selama mobilitas
secara aman dan efisien.
Stabilitas pergelangan kaki terbentuk sebagai hasil interaksi antara struktur
mekanis dan dinamis. Stabilitas dari struktur mekanis disebut sebagai stabilisator pasif,
yang terdiri dari struktur sendi dan ligamen. Stabilitas dinamis disebut juga sebagai
stabilitas fungsional, yang terbentuk dari input mekanoreseptor serta aktivasi dan daya
tahan unit muskulotendinogen.
Sebagaimana digambarkan pada gambar 1, setiap input dari reseptor sendi dan
kulit akan memberikan umpan balik kepada sistem saraf pusat untuk kemudian diarahkan
kembali sebagai umpan maju kepada α dan γ motor neuron sebagai antisipator gerakan.
Kontrol neuromuskuler pada sistem saraf pusat berfungsi untuk menginterpretasikan dan
mengintegrasikan informasi proprioseptif dan kinestetik dan mengontrol otot dan sendi
individual untuk memproduksi gerak terkoordinasi.
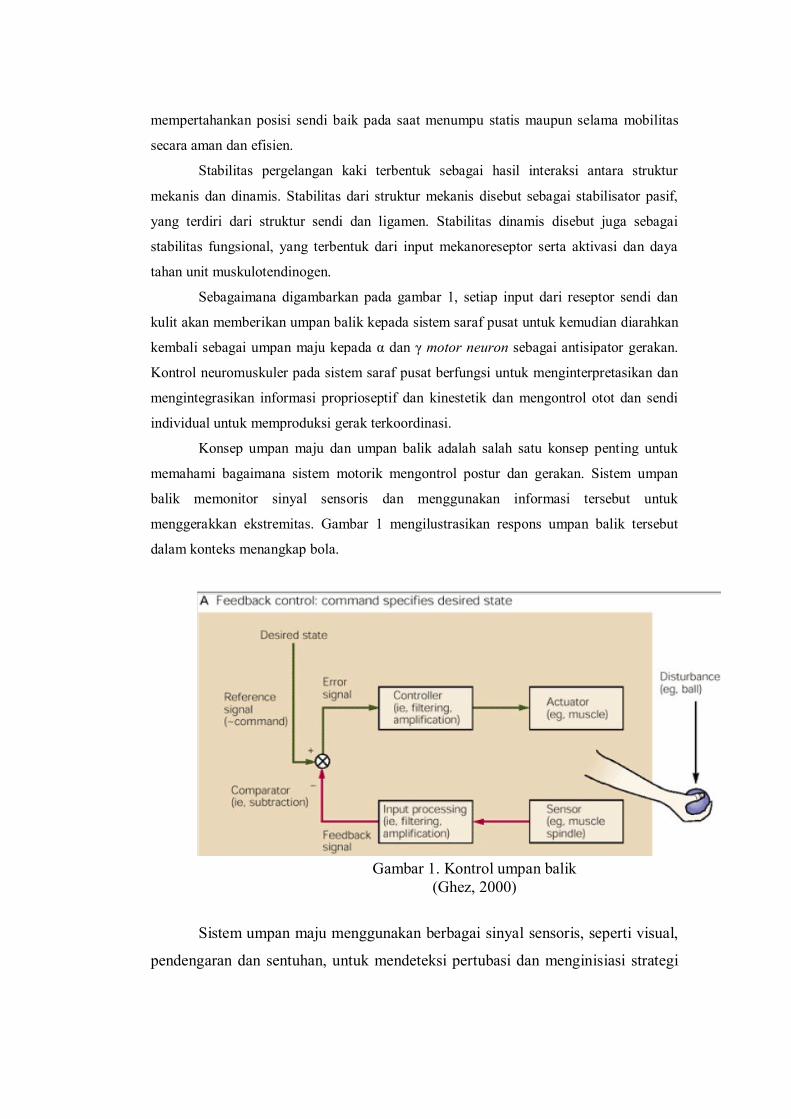
Konsep umpan maju dan umpan balik adalah salah satu konsep penting untuk
memahami bagaimana sistem motorik mengontrol postur dan gerakan. Sistem umpan
balik memonitor sinyal sensoris dan menggunakan informasi tersebut untuk
menggerakkan ekstremitas. Gambar 1 mengilustrasikan respons umpan balik tersebut
dalam konteks menangkap bola.
Gambar 1. Kontrol umpan balik(Ghez, 2000)
Sistem umpan maju menggunakan berbagai sinyal sensoris, seperti visual,
pendengaran dan sentuhan, untuk mendeteksi pertubasi dan menginisiasi strategi
gerakan secara proaktif berdasarkan penglaman. Oleh karena itu sistem umpan
maju seringkali disebutkan sebagai sistem antisipator.
Tidak seperti sistem umpan balik, kontrol umpan maju bertindak lebih
dulu sebelum adanya gangguan. Hanya saja, karena disebutkan sebagai respons
umpan maju, seolah sistem ini terlepas sama sekali dari kebutuhan akan sinyal
sensoris. Faktanya, kontrol umpan maju harus mendapatkan informasi sensoris
yang adekuat disertai pengalaman untuk dapat bekerja dengan benar.
Kontrol umpan maju digunakan oleh sistem motorik untuk mengontrol
postur dan gerakan. Saat berdiri, otot tungkai selalu berkontraksi menyesuaikan
diri sebagai kompensasi perubahan pusat gravitasi yang terjadi saat proses
respirasi, gerakan batang tubuh dan gerakan ekstremitas atas.
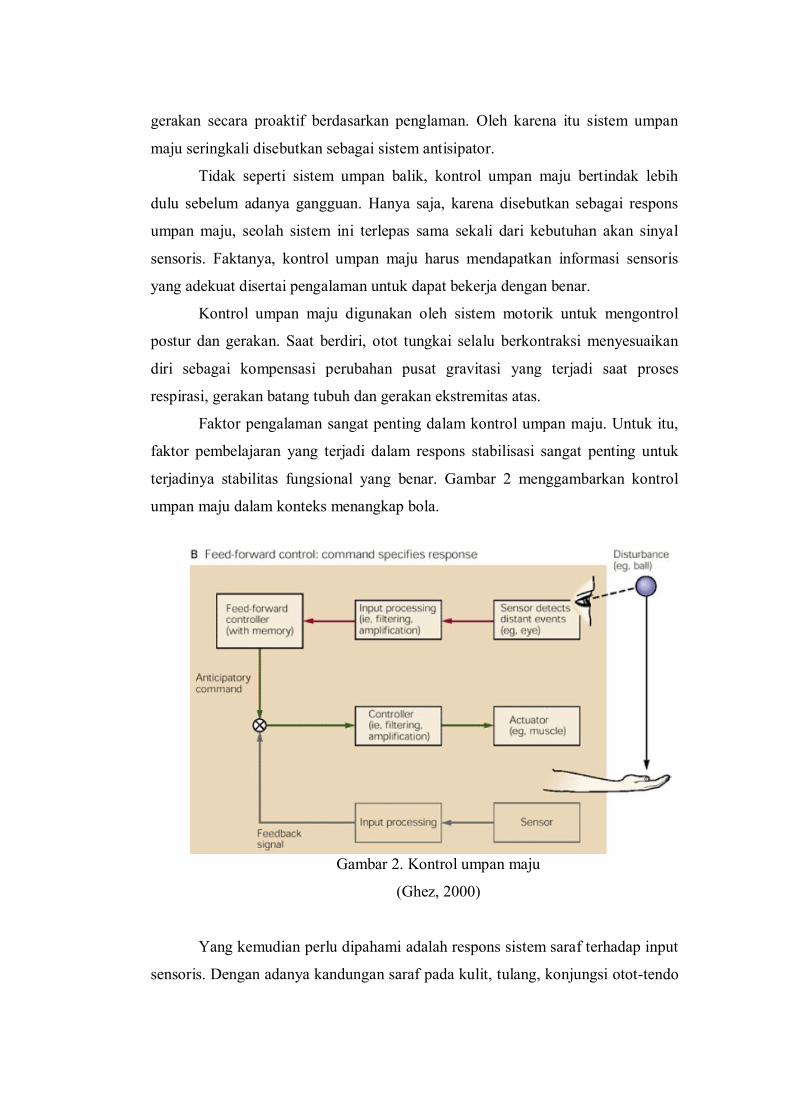
Faktor pengalaman sangat penting dalam kontrol umpan maju. Untuk itu,
faktor pembelajaran yang terjadi dalam respons stabilisasi sangat penting untuk
terjadinya stabilitas fungsional yang benar. Gambar 2 menggambarkan kontrol
umpan maju dalam konteks menangkap bola.
Gambar 2. Kontrol umpan maju
(Ghez, 2000)
Yang kemudian perlu dipahami adalah respons sistem saraf terhadap input
sensoris. Dengan adanya kandungan saraf pada kulit, tulang, konjungsi otot-tendo
dan sendi, sistem mekanoreseptor dapat mendeteksi sentuhan, tekanan, nyeri serta
posisi dan gerakan sendi. Pada sendi, sistem somatosensoris memiliki dua sistem
mekanoreseptor, yaitu yang beradaptasi dengan cepat (AC) melalui α motor
neuron, dan yang beradaptasi lambat (AL) melalui γ motor neuron. Jika sendi
mendapatkan stimulus tekanan dan gerak yang kontinu, α motor neuron akan
menurunkan sinyal ke saraf pusat, sementara γ motor neuron yang
mempertahankan sinyal dan kontraksi otot.
Beberapa jaras refleks melibatkan beberapa sirkuit sekaligus. Salah
satunya dalam gerakan pergelangan kaki adalah aktivasi Flexor Reflex Afferent
(FRA) yang menghasilkan crossed extension reflex.
FRA melibatkan jalur refleks monosinaptik dan polisinaptik yang meliputi
interneuron fasilitator dan inhibitor. Karakteristik FRA adalah konvergensi
multisensorial terhadap interneuron yang terlibat di sepanjang jalur, sehingga
stimulusasi FRA terjadi pada berbagai output motorik yang bervariasi. Output
motorik ini dapat dimodifikasi dengan posisi tungkai, komando desendens dan
input aferen.
Proses penerjemahan dalam sistem ini berlangsung pada central pattern
generator (CPG) yang berada di batang otak dan medulla spinalis. CPG dapat
menggenerasikan gerakan lokomotor terkoordinasi tanpa umpan balik dari aferen
yang berhubungan dengan gerakan. CPG dapat mengubah output, bergantung
pada kebutuhan kecepatan dan dalam respons terhadap penghambat. Walaupun
CPG dapat beroperasi tanpa input aferen, aktivitas CPG secara konstan
dimodifikasi oleh ketersediaan input sensoris. Pada setiap momen atau tahap
gerakan, terdapat kepentingan dan konsekuensi dari perubahan input aferen yang
berbeda, yang disebut neuron komando. Neuron komando didefinisikan sebagai
neuron yang merespons input sensoris atau desendens dan menginisiasi aktivitas
CPG. Tanpa memperhatikan inputnya, gerakan atau kondisi yang berbeda akan
mengaktivasi neuron komando yang berbeda. Pada gilirannya, neuron komando
akan mengaktivasi neural spesifik yang bersekuensi pada CPG.
Aktivitas pada CPG dan pola gerakan yang dihasilkan aktivasi CPG
dipengaruhi oleh input pusat supraspinal, tipe dan derajat umpan balik aferen, dan
pengaruh posisi tubuh dan tungkai pada umpan balik aferen
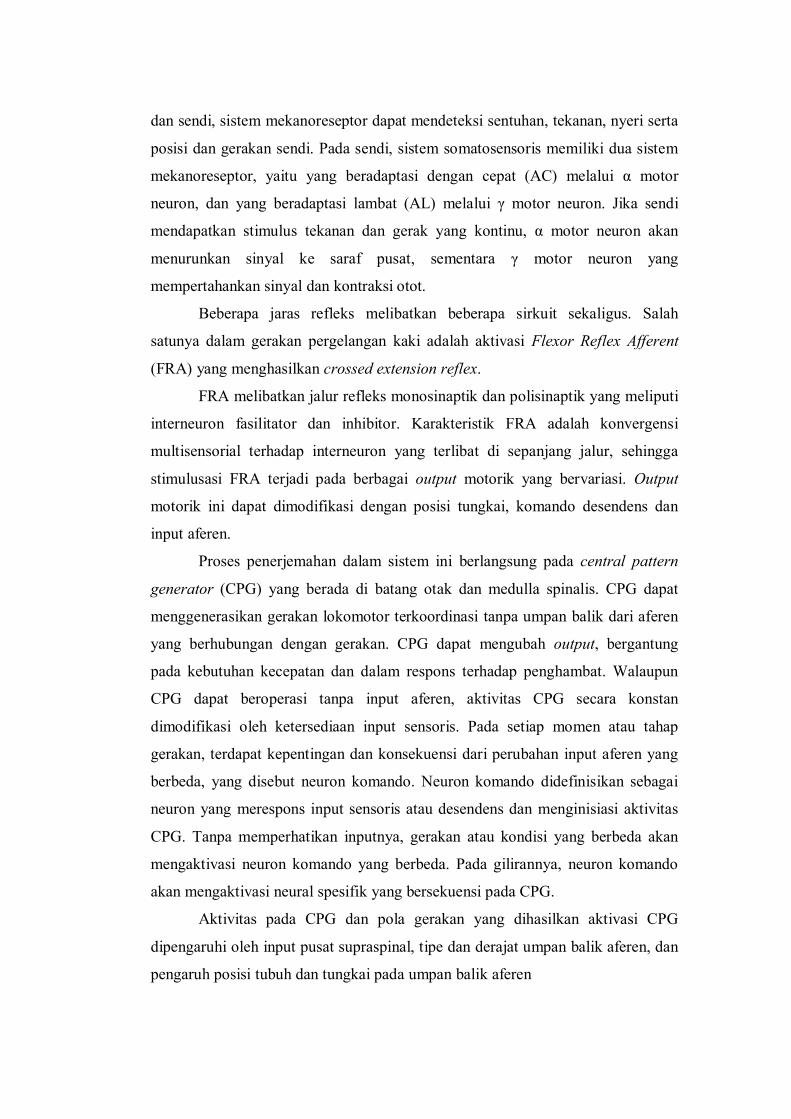
Reaksi postural dikoordinasikan secara kortikal melalui peningkatan
aktivitas yang berkesinambungan antara otot agonis dan antagonis untuk
mempertahankan stabilitas.
Gambar 3. Hubungan propriosepsi dan kontrol neuromuskuler terhadap stabilitas sendi.(Hertel, 2011)
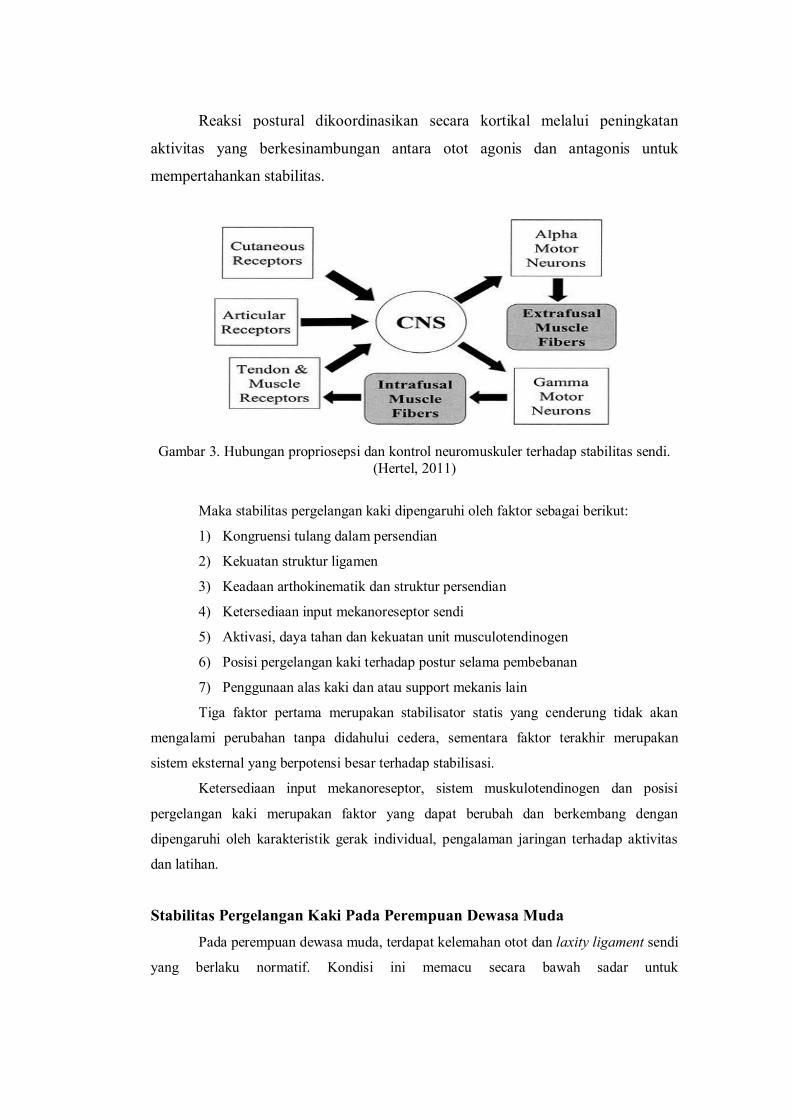
Maka stabilitas pergelangan kaki dipengaruhi oleh faktor sebagai berikut:
1) Kongruensi tulang dalam persendian
2) Kekuatan struktur ligamen
3) Keadaan arthokinematik dan struktur persendian
4) Ketersediaan input mekanoreseptor sendi
5) Aktivasi, daya tahan dan kekuatan unit musculotendinogen
6) Posisi pergelangan kaki terhadap postur selama pembebanan
7) Penggunaan alas kaki dan atau support mekanis lain
Tiga faktor pertama merupakan stabilisator statis yang cenderung tidak akan
mengalami perubahan tanpa didahului cedera, sementara faktor terakhir merupakan
sistem eksternal yang berpotensi besar terhadap stabilisasi.
Ketersediaan input mekanoreseptor, sistem muskulotendinogen dan posisi
pergelangan kaki merupakan faktor yang dapat berubah dan berkembang dengan
dipengaruhi oleh karakteristik gerak individual, pengalaman jaringan terhadap aktivitas
dan latihan.
Stabilitas Pergelangan Kaki Pada Perempuan Dewasa MudaPada perempuan dewasa muda, terdapat kelemahan otot dan laxity ligament sendi
yang berlaku normatif. Kondisi ini memacu secara bawah sadar untuk
mengkompensasikan defisiensi tersebut melalui perubahan posisi, baik dalam aktifitas
statis maupun dinamis.
Pengetahuan ini mendorong banyak peneliti mempelajari kinematika perempuan
muda dibandingkan rekan seusianya. Penelitian umumnya dilakukan pada tuntutan
aktifitas yang lebih tinggi untuk memicu terjadinya reaksi kontraksi otot yang lebih besar,
hingga didapatkan deskripsi biomekanika perempuan dewasa muda.
Berdasarkan hasil penelitian ditemukan bahwa pada posisi single leg squat,
terdapat kecenderungan tidak mampu mempertahankan posisi varus lutut secara adekuat
yang dikompensasikan dengan melakukan lebih banyak dorsi fleksi dan pronasi
pergelangan kaki, dengan posisi hip adduksi, fleksi dan eksorotasi serta lateral fleksi
trunk (Zeller, 2001). Dalam penelitian yang sama juga ditemukan perempuan
menggunakan aktivasi otot yang lebih besar untuk mempertahankan posisi tersebut. Ini
ditemukan dengan penelitian yang lain, bahwa selama pendaratan half squat parasut,
perempuan menunjukkan amplitudo aktivitas tibialis anterior yang lebih rendah, dengan
puncak kecepatan angular dorsi fleksi yang lebih tinggi (Niu W, 2010). Hal ini dapat
terjadi akibat kelemahan otot normatif pada perempuan, yang telah dibuktikan
sebelumnya.
Dalam penelitian yang lain, perempuan mendemonstasikan postur yang lebih
tegak dengan ruang gerak sendi panggul dan pergelangan kaki yang lebih besar saat
melakukan pendaratan setelah meloncat, dengan kecepatan angular maksimal sendi yang
lebih besar. Perempuan juga menunjukkan absorpsi energi dan puncak kekuatan dari
ekstensor lutut dan plantar fleksor pergelangan kaki. Sementara lutut adalah pusat
absorpsi energi pada kedua jenis kelamin, perempuan lebih banyak menggunakan plantar
fleksor pergelangan kaki sebagai kontributor kedua.
Saat dituntut berjalan dengan kecepatan tinggi, perempuan menunjukkan aktivitas
otot tibialis anterior, gerak pergelangan kaki, reaksi tekanan vertikal dan rata-rata denyut
nadi yang lebih tinggi (Min Chi Chiu, 2007).
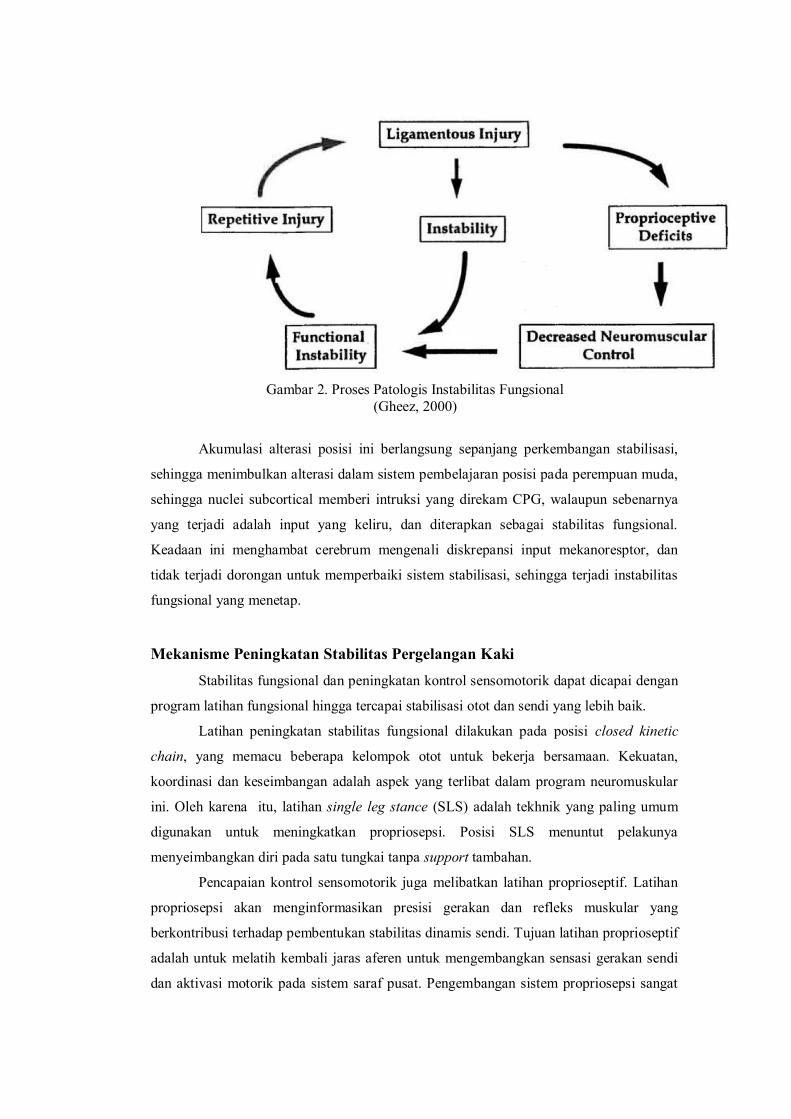
Gambar 2. Proses Patologis Instabilitas Fungsional(Gheez, 2000)
Akumulasi alterasi posisi ini berlangsung sepanjang perkembangan stabilisasi,
sehingga menimbulkan alterasi dalam sistem pembelajaran posisi pada perempuan muda,
sehingga nuclei subcortical memberi intruksi yang direkam CPG, walaupun sebenarnya
yang terjadi adalah input yang keliru, dan diterapkan sebagai stabilitas fungsional.
Keadaan ini menghambat cerebrum mengenali diskrepansi input mekanoresptor, dan
tidak terjadi dorongan untuk memperbaiki sistem stabilisasi, sehingga terjadi instabilitas
fungsional yang menetap.
Mekanisme Peningkatan Stabilitas Pergelangan KakiStabilitas fungsional dan peningkatan kontrol sensomotorik dapat dicapai dengan
program latihan fungsional hingga tercapai stabilisasi otot dan sendi yang lebih baik.
Latihan peningkatan stabilitas fungsional dilakukan pada posisi closed kinetic
chain, yang memacu beberapa kelompok otot untuk bekerja bersamaan. Kekuatan,
koordinasi dan keseimbangan adalah aspek yang terlibat dalam program neuromuskular
ini. Oleh karena itu, latihan single leg stance (SLS) adalah tekhnik yang paling umum
digunakan untuk meningkatkan propriosepsi. Posisi SLS menuntut pelakunya
menyeimbangkan diri pada satu tungkai tanpa support tambahan.
Pencapaian kontrol sensomotorik juga melibatkan latihan proprioseptif. Latihan
propriosepsi akan menginformasikan presisi gerakan dan refleks muskular yang
berkontribusi terhadap pembentukan stabilitas dinamis sendi. Tujuan latihan proprioseptif
adalah untuk melatih kembali jaras aferen untuk mengembangkan sensasi gerakan sendi
dan aktivasi motorik pada sistem saraf pusat. Pengembangan sistem propriosepsi sangat
penting untuk dilakukan karena umpan balik proprioseptif akan meningkatkan dan
mempertahankan stabilitas fungsional sendi.
Latihan proprioseptif harus menggunakan teknik yang akan membangkitkan
kebutuhan aktivasi otot pronator dan supinator kaki (melatih koordinasi, propriosepsi dan
kekuatan otot stabilisator pergelangan kaki). Aktivasi ko-kontraksi ini diupayakan terjadi
semi otomatis, karena sejatinya aktivitas stabilisasi merupakan sistem yang berlangsung
pada CPG. Hanya saja, berdasarkan penelitian ditemukan bahwa otonomi CPG berkurang
pada manusia. Pada perkembangan manusia fungsi CPG yang benar menjadi bergantung
pada integrasi saraf yang lebih tinggi, yaitu pada sistem saraf pusat, pada korteks cerbral.
Sekuensi temporal aktivasi otot melibatkan CPG spinal dan integrasi sirkuit neural
dengan input pusat otak yang lebih tinggi.
Untuk mencapai gerakan semi otomatis yang dimaksud, maka pada latihan
proprioseptif juga melibatkan gerakan yang lambat dalam setiap perpindahan gerak dan
posisi, untuk memberikan kesempatan pada nuclei subcortical dan basal ganglia
menganalisa sensasi posisi dan mengirimkan umpan balik berupa aktivitas ko-kontraksi
otot yang diharapkan. Pembelajaran inilah yang kemudian akan diadaptasikan kepada
CPG sebagai pola stabilisasi fungsional yang baru.
Senam Vitalisasi Otak
Senam Vitalisasi Otak (SVO) adalah salah satu olahraga yang disusun
berdasarkan memori gerak (kinestetik), yang gerakannya berasal dari berbagai gerakan-
gerakan tarian di Indonesia yang melibatkan berbagai proses imajinasi penglihatan,
pendengaran, sensorik, emosional (fungsi luhur otak) dalam satu gerakan. Dalam SVO
diperlukan sinkronisasi antara gerak napas fisiologis dan gerakan itu sendiri.
Tujuan SVO adalah untuk memelihara berbagai fungsi otak agar dapat bekerja
sesuai fungsi dan kebutuhannya dengan memberi suplai oksigen dan darah yang optimal,
khususnya ke otak. SVO akan memberikan stimulasi yang adekuat pada struktur-struktur
otak tertentu secara unimodal dan pada struktur yang berkaitan/multimodal yang berperan
dalam kehidupan manusia sehari-hari.
Prinsip dasar dari senam vitalisasi otak adalah:
1) Lambat
Gerakan dalam SVO dilakukan perlahan-lahan dengan tujuan
menyelaraskan pola gerak otot, gerakan ritmis otot-otot pernapasan, dan metabolisme
pada bagian otak yang terstimulasi dan melalui imajinasi saat melakukan gerakan.
2) Dari bawah ke atas
Gerakan selama SVO mengupayakan sistematika gerak dari arah tubuh
bagian bawah terus ke bagian atas, dengan tujuan untuk melatih bagian otot yang
lebih kecil sampai otot yang lebih besar.
3) Berulang-ulang
Gerakan dalam SVO dilakukan dengan beberapa kali pengulangan. Hal ini
penting sekali agar stimulasi gerak dapat terekam dalam otak melalui jaras
proprioseptif (melatih rasa gerakan pada sendi/memori gerak)
4) Melibatkan pandangan mata
Setiap gerakan yang dilakukan oleh tangan maupun kaki pada SVO
senantiasa melibatkan pandangan mata. Hal ini akan membantu meningkatkan
konsentrasi visual dan kemampuan visuospasial (mengenal ruang).
5) Gerak sendi penuh
Gerakan pada SVO dilakukan sampai batas maksimal sendi.
6) Melibatkan pernapasan
Dalam SVO, pernapasan senantiasa dilakukan secara teratur pada setiap
gerakan. Hal ini penting untuk mencapai oksigenisasi yang optimal menuju otak
karena permasalahan pada otak bisa muncul akibat kurangnya oksigen di otak.
Sebaliknya, metabolisme otak optimal dapat tercapai bila oksigen di otak tercukupi.
Dalam SVO, suatu upaya yang terus diarahkan adalah bagaimana proses “pernapasan
dalam” dapat dilakukan setiap melakukan gerak.
7) Dihayati (sesuai gerakan yang dilakukan)
Setiap melakukan SVO, peserta diharapkan menghayati gerakan yang
dilakukannya. Setiap gerakan pada Senam Vitalisasi Otak dilakukan dengan imajinasi
tertentu sesuai dengan rangsang suara atau pola gerakan yang akan menyebabkan
terangsangnya berbagai tempat di otak sehingga terjadi keselarasan antara gerak,
pikiran, dan emosi (body and mind exercise).
Gerakan-gerakan dan posisi pergelangan kaki dalam SVO merupakan gerakan
“ekstrim” yang jarang terjadi pada kehidupan sehari-hari. Selain itu, setiap perpindahan
gerakan pergelangan kaki dilakukan dalam tempo yang lambat, dan setiap posisi
dipertahankan selama beberapa detik. Model gerakan ini memberikan kesempatan
teraktivasinya γ motor neuron pada muscle spindle pada otot agonis dan golgi tendon
organ (GTO) pada otot antagonis sebagai dasar re-edukasi neuromuskular.
Informasi dari mekanoreseptor ini dikonduksikan ke area sub kortikal, batang
otak dan korteks serebral di sistem saraf pusat melalui berbagai tipe serabut saraf. Pada
batang otak, sensasi dari mekanoreseptor di kulit, ligamen, kapsul sendi dan
musculotendinogen dikombinasikan dengan input dari vestibular dan visual untuk
mempertahankan kontrol postur dan keseimbangan.
Input propriosepsi mencapai korteks serebral menghasilkan kesadaran volunter
posisi tubuh dan gerak dan dibutuhkan untuk menginisiasi gerak volunter. Umpan balik
propriosepsi menghasilkan aktivasi ko-kontraksi yang dibutuhkan untuk mempertahankan
posisi optimal sebagai stabilitas fungsional sendi.
Bersamaan dengan masuknya informasi dari mekanoreseptor, penghayatan gerak
sebagai salah satu komponen senam vitalisasi otak meningkatkan keterlibatan aspek
kognitif untuk menciptakan harmonisasi dan keseimbangan fungsi otak, kerja otot dan
stabilisasi emosi.
Gerakan-gerakan dalam senam vitalisasi otak dilakukan berulang-ulang sehingga
perekaman stimulasi gerak menjadi pola pembelajaran yang menetap dan dapat
diteruskan sebagai pola gerak pada CPG. Dengan demikian terjadi re-edukasi
neuromuskular stabilisasi fungsional pada sistem saraf pusat.
Re-edukasi fungsi setelah durasi waktu tertentu akan menghasilkan pembiasaan
koordinasi neuromuskular sehingga pada saat dibutuhkan akan terjadi interaksi otomatis
pada komando motorik volunter dan otot-otot stabilisator.
Pemeriksaan Stabilitas Pergelangan Kaki
Dalam beberapa penelitian, ketidakstabilan postur telah digunakan untuk
memprediksi kerentanan terjadinya sprain pada pergelangan kaki. Tes single leg stance
(SLS, berdiri menumpu dengan satu kaki) memiliki korelasi dengan amplitudo dan
kecepatan ketidakstabilan pada individu normal. Penelitian menunjukkan bahwa resiko
tinggi terdapat pada atlet dengan tes SLS positif walaupun atlet tersebut tidak memiliki
riwayat sprain (resiko relatif= 7.18 (95% CI, 1.06 to 61.7)) (Tropp, 1988).
Dalam pelaksanaan tes, harus diperhatikan bahwa posisi awal kaki
mempengaruhi kemampuan berdiri dengan menumpu pada satu kaki. Subjek diminta
berdiri pada satu kaki. Tungkai yang tidak menumpu tidak boleh menyentuh tungkai yang
menumpu. Subjek memandang lurus ke depan dan berfokus kepada satu titik. Tes
dilakukan tanpa alas kaki.
Gambar . Tes single leg stance.
(wellness springs, 2011)
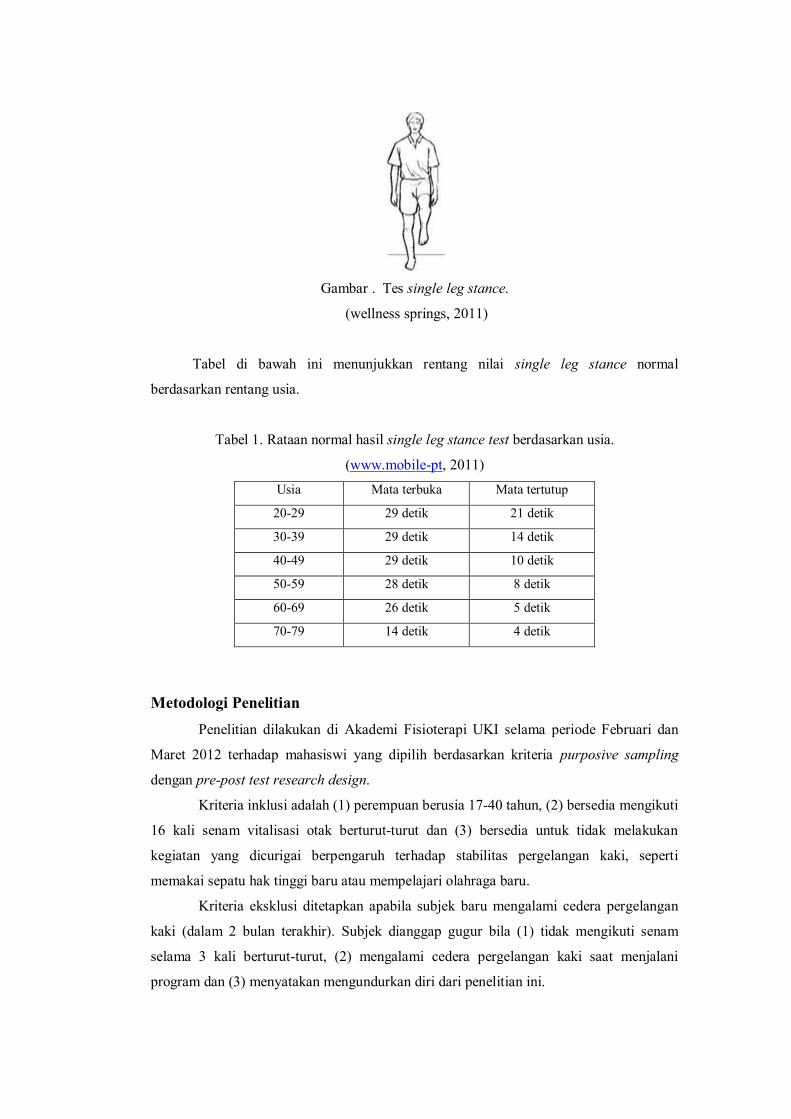
Tabel di bawah ini menunjukkan rentang nilai single leg stance normal
berdasarkan rentang usia.
Tabel 1. Rataan normal hasil single leg stance test berdasarkan usia.
(www.mobile-pt, 2011)
Usia Mata terbuka Mata tertutup
20-29 29 detik 21 detik
30-39 29 detik 14 detik
40-49 29 detik 10 detik
50-59 28 detik 8 detik
60-69 26 detik 5 detik
70-79 14 detik 4 detik
Metodologi PenelitianPenelitian dilakukan di Akademi Fisioterapi UKI selama periode Februari dan
Maret 2012 terhadap mahasiswi yang dipilih berdasarkan kriteria purposive sampling
dengan pre-post test research design.
Kriteria inklusi adalah (1) perempuan berusia 17-40 tahun, (2) bersedia mengikuti
16 kali senam vitalisasi otak berturut-turut dan (3) bersedia untuk tidak melakukan
kegiatan yang dicurigai berpengaruh terhadap stabilitas pergelangan kaki, seperti
memakai sepatu hak tinggi baru atau mempelajari olahraga baru.
Kriteria eksklusi ditetapkan apabila subjek baru mengalami cedera pergelangan
kaki (dalam 2 bulan terakhir). Subjek dianggap gugur bila (1) tidak mengikuti senam
selama 3 kali berturut-turut, (2) mengalami cedera pergelangan kaki saat menjalani
program dan (3) menyatakan mengundurkan diri dari penelitian ini.
Subjek yang memenuhi kriteria lalu menjalani single leg stance test. Tes
dilakukan dengan meminta subjek berdiri di atas 1 tungkai selama mungkin hingga
ditemukan tanda instabilitas fungsional seperti membuka lengan, mempronasi-
supinasikan kaki yang menumpu atau menurunkan tungkai kontralateral. Seluruh
prosedur ini direkam sejak sebelum meminta subjek mengangkat tungkai hingga subjek
menurunkan tungkai, dan diulangi 3 kali untuk kemudian dilakukan pada tungkai
kontralateral dengan prosedur yang sama.
Hasil tes pada setiap tungkai dihitung selama subjek dalam keadaan menumpu di
atas satu tungkai dalam satuan detik, dan diambil nilai rataan dari ketiga pengulangan.
Setelah dilakukan tes, subjek menjalani 16 kali senam, selama 4 kali seminggu
dalam waktu 1 bulan. Senam yang digunakan adalah senam vitalisasi otak yang
dipopulerkan oleh Soemarno Markam dan kawan-kawan tanpa dilakukan modifikasi.
Setelah digenapi 16 kali senam, subjek menjalani tes single leg stance kembali
dengan prosedur yang sama untuk kedua tungkai.
Rentang waktu stabilisasi sebelum dan sesudah senam dibandingkan untuk
membuktikan hipotesa penelitian.
Hasil dan Pembahasan
Setelah dilakukan penapisan subjek berdasarkan kriteria inklusi yang telah
ditetapkan, didapatkan 15 orang subjek dengan distribusi usia sebagaimana digambarkan
melalui Tabel 1. Karena pengujian dilakukan terhadap pergelangan kaki kanan dan kiri,
maka didapatkan 30 sampel pergelangan kaki.
Tabel 1
Distribusi sampel berdasarkan usia
Klasifikasi usia Jumlah Persentase (%)
15-19 3 20
20-24 11 73.3
25-29 1 6,7
Total 15 100
Berdasarkan data distribusi usia yang kemudian dihubungkan dengan nilai single
leg stance (Tabel 2) ditemukan bahwa tidak ada hubungan antara usia dengan nilai
rentang waktu stabilisasi fungsional. Bahkan dapat dilihat bahwa nilai stabilitas subjek
yang berusia 29 tahun adalah nilai median dari keseluruhan peserta senam.
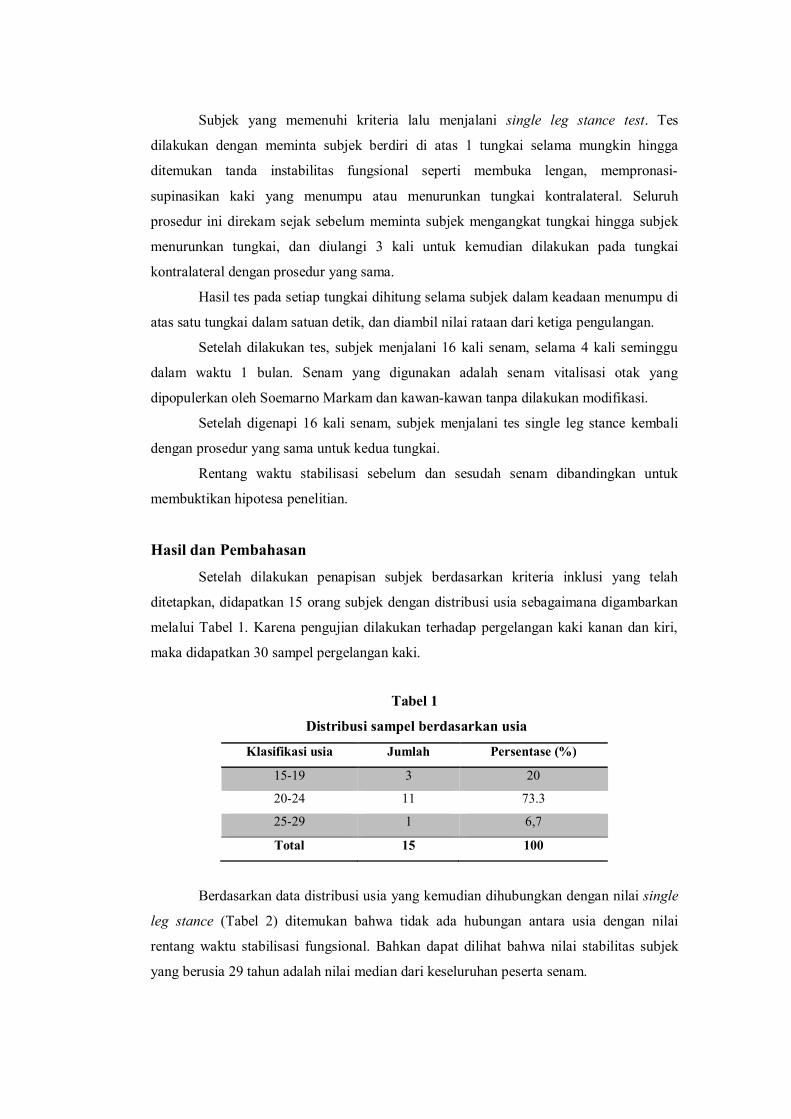
Tabel 2
Distribusi usia dan nilai single leg stance sebelum latihan
Usia Pre Test Kanan Pre Test Kiri
19 27 5.00
19 22 20.67
19 3 8.33
20 14 14.00
20 3 1.67
20 19 3.67
20 37 23.67
20 19 10.00
20 8 5.67
20 5 4.67
20 7 13.00
21 30 23.67
21 6 20.67
21 8 11.00
29 13 17.67
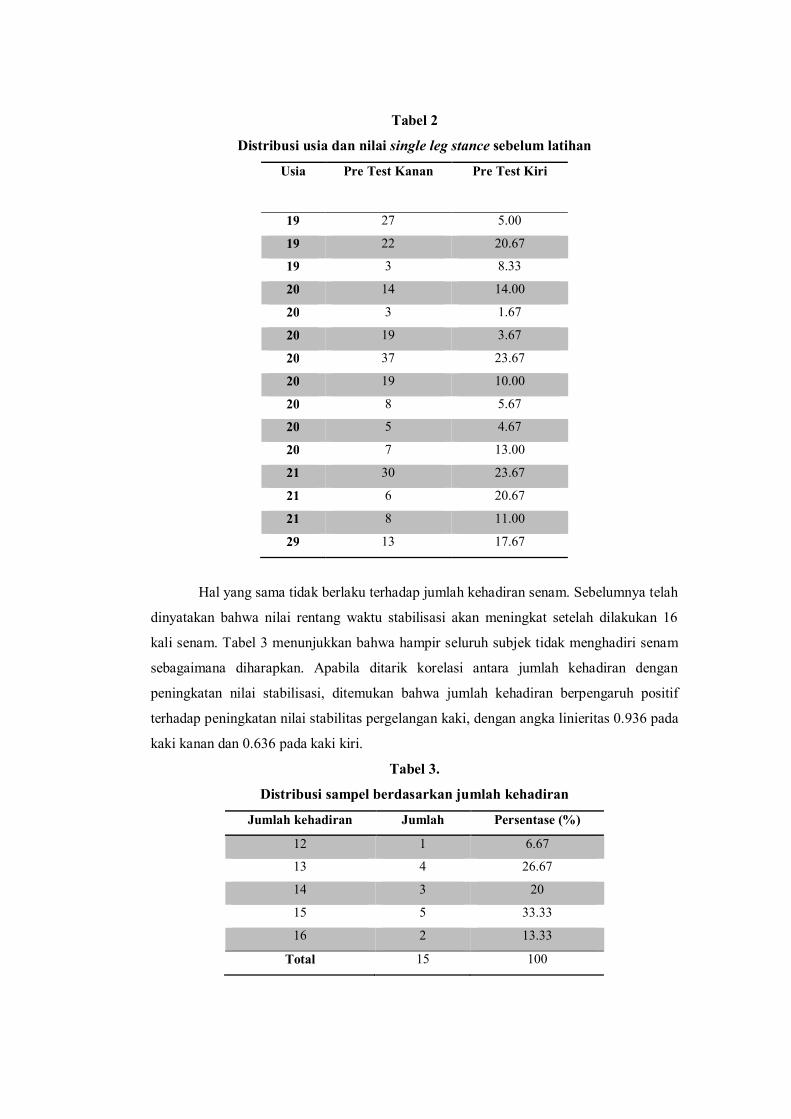
Hal yang sama tidak berlaku terhadap jumlah kehadiran senam. Sebelumnya telah
dinyatakan bahwa nilai rentang waktu stabilisasi akan meningkat setelah dilakukan 16
kali senam. Tabel 3 menunjukkan bahwa hampir seluruh subjek tidak menghadiri senam
sebagaimana diharapkan. Apabila ditarik korelasi antara jumlah kehadiran dengan
peningkatan nilai stabilisasi, ditemukan bahwa jumlah kehadiran berpengaruh positif
terhadap peningkatan nilai stabilitas pergelangan kaki, dengan angka linieritas 0.936 pada
kaki kanan dan 0.636 pada kaki kiri.
Tabel 3.
Distribusi sampel berdasarkan jumlah kehadiran
Jumlah kehadiran Jumlah Persentase (%)
12 1 6.67
13 4 26.67
14 3 20
15 5 33.33
16 2 13.33
Total 15 100
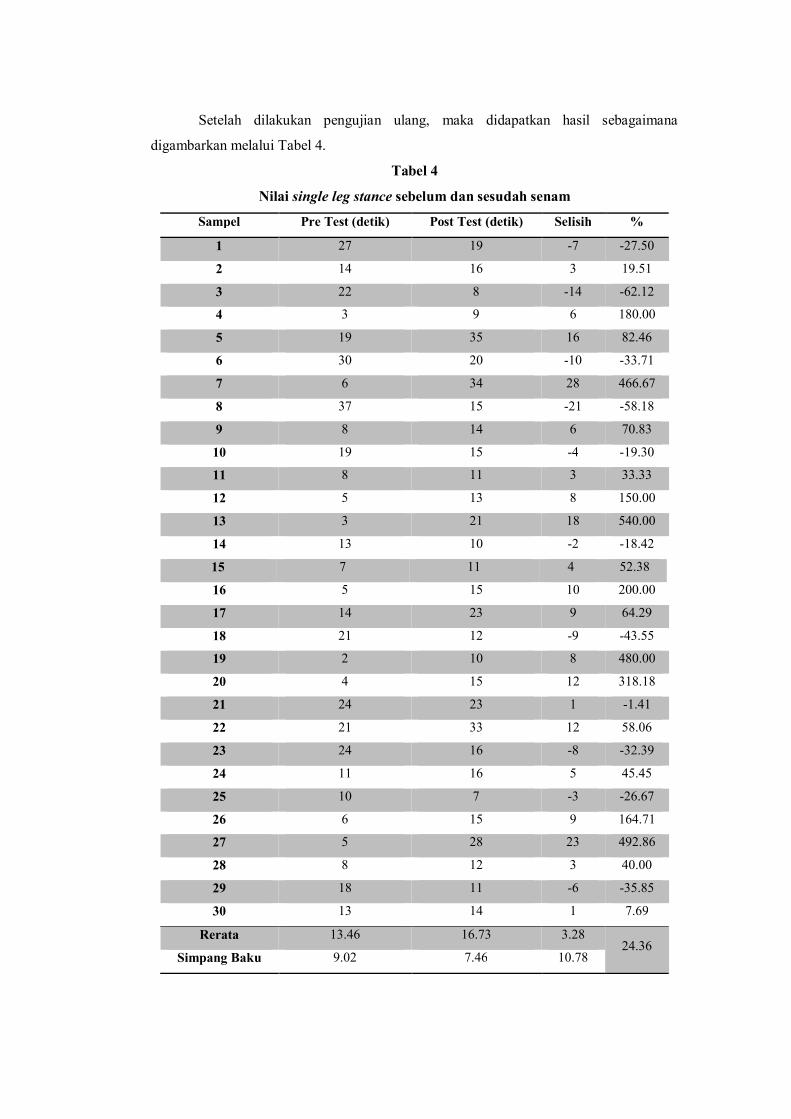
Setelah dilakukan pengujian ulang, maka didapatkan hasil sebagaimana
digambarkan melalui Tabel 4.
Tabel 4
Nilai single leg stance sebelum dan sesudah senam
Sampel Pre Test (detik) Post Test (detik) Selisih %
1 27 19 -7 -27.50
2 14 16 3 19.51
3 22 8 -14 -62.12
4 3 9 6 180.00
5 19 35 16 82.46
6 30 20 -10 -33.71
7 6 34 28 466.67
8 37 15 -21 -58.18
9 8 14 6 70.83
10 19 15 -4 -19.30
11 8 11 3 33.33
12 5 13 8 150.00
13 3 21 18 540.00
14 13 10 -2 -18.42
15 7 11 4 52.38
16 5 15 10 200.00
17 14 23 9 64.29
18 21 12 -9 -43.55
19 2 10 8 480.00
20 4 15 12 318.18
21 24 23 1 -1.41
22 21 33 12 58.06
23 24 16 -8 -32.39
24 11 16 5 45.45
25 10 7 -3 -26.67
26 6 15 9 164.71
27 5 28 23 492.86
28 8 12 3 40.00
29 18 11 -6 -35.85
30 13 14 1 7.69
Rerata 13.46 16.73 3.2824.36
Simpang Baku 9.02 7.46 10.78

Dari data tersebut dapat dilihat bahwa peningkatan nilai rentang waktu stabilisasi
tidak sama antara satu sampel dengan sampel yang lain. Bahkan beberapa sampel
mengalami penurunan nilai rentang waktu stabilisasi.
Dari data hasil pengukuran rentang waktu stabilisasi (tabel 4) menunjukkan
peningkatan yang sangat baik pada sampel pergelangan kaki nomor 7, dimana terjadi
peningkatan sebesar 28 poin (540 %). Subjek dimaksud hadir 16 kali senam, melakukan
senam dengan serius dan maneuver pergelangan kaki yang sesuai dengan pola gerak
normal.
Sampel lain yang mengalami peningkatan nilai stabilisasi adalah sampel
pergelangan kaki nomor 27 dengan peningkatan 23 (492 %) poin. Subjek hadir 14 kali
senam, melakukan senam dengan serius, dan walaupun maneuver pergelangan kaki pada
awal senam selalu mengambil posisi pronasi, sampel mengalami perbaikan posisi setiap
kali senam, sehingga pada minggu terakhir sesi senam, maneuver pergelangan kaki sudah
dalam alignment yang lebih baik.
Sampel pergelangan kaki nomor 8 dengan penurunan nilai stabilisasi sebesar -21
poin (-58%). Sampel dimaksud hanya hadir 12 kali senam, hanya saja walaupun
melakukan senam dengan serius, manuver pergelangan kaki saat menumpu selalu
mengambil posisi pronasi.
Dengan tingkat linieritas kehadiran dan nilai stabilisasi sebesar 0.936 dan 0.636,
sesungguhnya dapat dimengerti bahwa semakin sering mengikuti senam vitalisasi otak,
semakin tinggi peningkatan nilai stabilitas pergelangan kakinya. Hanya saja hal tersebut
belum dapat menjelaskan penurunan nilai stabilitas pergelangan kaki pada sampel yang
lain.
Berdasarkan pengamatan peneliti, selama dilakukannya senam vitalisasi otak,
sampel dengan penurunan nilai single leg stance adalah sampel yang selalu mengambil
maneuver pronasi pergelangan kaki pada penumpuan beban.
Pengaruh senam vitalitas otak terhadap stabilitas pergelangan kaki berhubungan
dengan penggunaan otak secara keseluruhan dimana gerakan lambat dan mudah untuk
dipahami sehingga memberikan pembelajaran sensomotorik kepada sistem vestibular,
visual dan proprioseptif. Posisi yang dilakukan selama pembelajaran semi otomatis
terhadap sistem stabilisasi akan direkam melalui primary motor cortex dan pre motor
cortex untuk selanjutnya diteruskan kepada pembelajaran di CPG sebagai suatu reedukasi
sistem sensomotorik stabilisasi pergelangan kaki.
Pada sampel yang berhasil mempelajari maneuver pergelangan kaki yang normal
dan mereposisi sistem neuromuskularnya selama pembelajaran senam vitalisasi otak,
maka reedukasi tersebut akan memperbaiki postural alignment, sistem proprioseptif dan
sistem kontraksi otot dan memberi suatu umpan maju yang baik dan normal, membentuk
suatu pola pergelangan kaki yang benar dan memperbaiki nilai stabilisasi pergelangan
kakinya.
Pada sampel yang mempertahankan pola maneuver alaminya, dimana terjadi
alterasi sistem proprioseptif dan pola kontraksi otot, alterasi tersebut akan dipertahankan
dan bahkan diperkuat melalui SVO, sehingga justru memberi pembelajaran sensomotorik
yang semakin kacau, sehingga semakin memperparah instabilitas fungsional pergelangan
kakinya, yang dicurigai menurunkan nilai single leg stance.
Faktor yang mempengaruhi peningkatan nilai stabilisasi pergelangan kaki adalah
tingkat kekerapan mengikuti senam, kesungguhan dalam melakukan gerakan, serta
terjadinya re-edukasi sensomotorik dalam pola dan alignment yang benar.
Faktor yang menghambat pada penelitian ini adalah apabila senam tidak
dilakukan secara rutin, dilakukannya aktifitas baru yang juga disinyalir mempengaruhi
nilai stabilitas pergelangan kaki dan gagalnya pembentukan pola gerak yang normal pada
pelaku senam. Pemilihan waktu penelitian juga berpengaruh, karena bila senam dilakukan
pada saat sampel sudah lelah, akan mempengaruhi tingkat atensi dan keseriusan dalam
melakukan senam. Ketelitian pengukuran dan sensibilitas pelaku terhadap perubahan
gerakan dalam senam juga dapat mempengaruhi hasil senam.
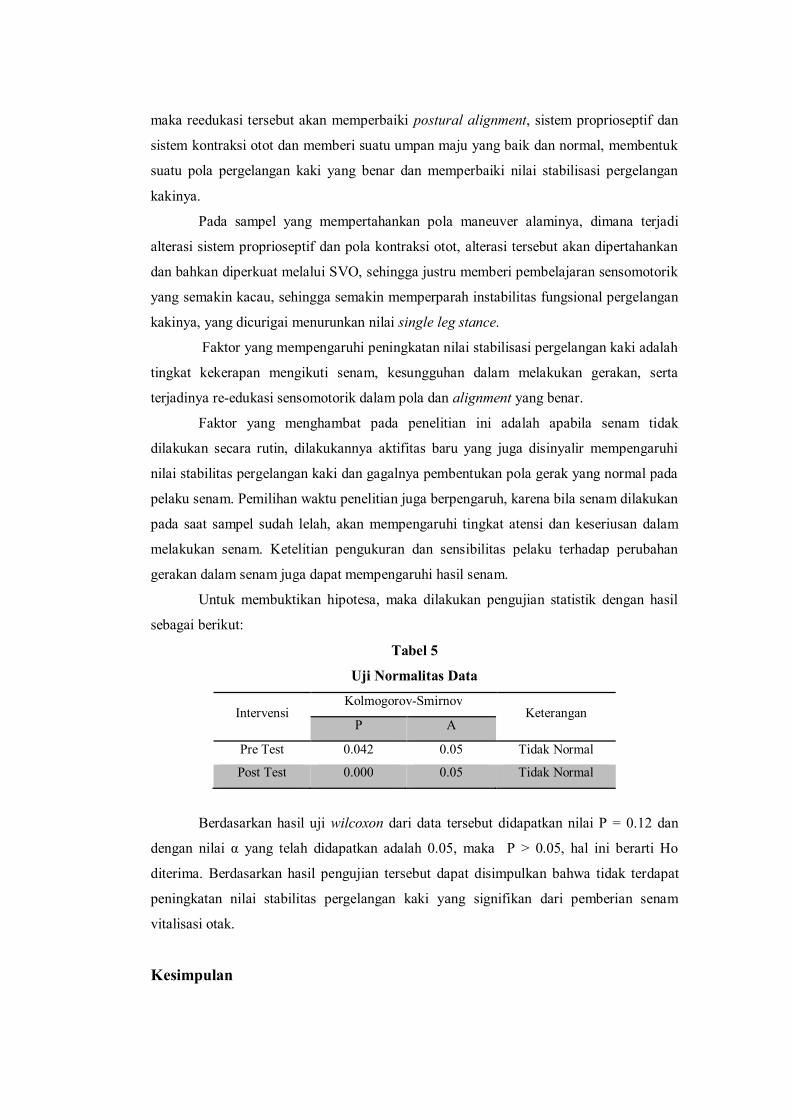
Untuk membuktikan hipotesa, maka dilakukan pengujian statistik dengan hasil
sebagai berikut:
Tabel 5
Uji Normalitas Data
IntervensiKolmogorov-Smirnov
KeteranganP Α
Pre Test 0.042 0.05 Tidak Normal
Post Test 0.000 0.05 Tidak Normal
Berdasarkan hasil uji wilcoxon dari data tersebut didapatkan nilai P = 0.12 dan
dengan nilai α yang telah didapatkan adalah 0.05, maka P > 0.05, hal ini berarti Ho
diterima. Berdasarkan hasil pengujian tersebut dapat disimpulkan bahwa tidak terdapat
peningkatan nilai stabilitas pergelangan kaki yang signifikan dari pemberian senam
vitalisasi otak.
Kesimpulan
Dengan hasil data statistik yang telah dijelaskan sebelumnya, maka dapat
disimpulkan bahwa senam vitalisasi otak tidak memberi manfaat yang signifikan terhadap
stabilitas pergelangan kaki perempuan dewasa muda.
Insignifikansi nilai ini dapat disebabkan oleh tidak optimalnya pembelajaran
umpan maju yang terjadi selama senam atau kurang optimalnya pelaksanaan senam baik
dari segi jumlah kehadiran maupun pemilihan waktu pelaksanaan.
Penelitian berikutnya mungkin perlu dilakukan dengan mengoreksi sistem
pembelajaran dimaksud untuk mendapatkan hasil yang lebih optimal.
Daftar PustakaAbrams, Brads, One Leg Standing Balance: Test Yourself, (Mobile Physical Therapy,
2010).
Cameron K. L., Time for paradigm shift in conseptualizing risk factors in sports injury
research, (Journal of Athletic Training, 2010).
Davis, Roger J., The Effects of a Four Week Single Leg Balance Training Program on
Balance Error Scoring System Scores of Trained and Untrained Leg, (Utah State
University, 2009).
De Vita, Paul; Tibor Hortobagyi, Age causes a redistribution of joint torques and powers
during gait, (Journal of Applied Physiology, 2000).
Decker, Michael J., et al, Gender differences in lower extremity kinematics, kinetics and
energy absorption during landing, (Clinical Biomechanics, 2003).
Eckstein F.; et al, Correlation and sex differences between ankle and knee cartilage
morphology determined by quantitative magnetic resonance imaging, (Annual
Rheumatic Diseases, 2004).
Ford, Kevin R.; et al, Gender Differences in the Kinematics of Unanticipated Cutting in
Young Athletes Applied Sciences, (Biodynamics Medicine & Science in Sports &
Exercise, Volume 37, 2005).
Gabriel R.C.; et al, Dynamic joint stiffness of the ankle during walking: gender-related
differences, (Physical Therapy Sport, 2008).
Gribble, Philips et al, The Effects of Fatigue and Chronic Ankle Instability on Dynamic
Postural Control, (Journal of Athletic Training, 2004).
Gwinn DE, et al, The relative incidence of anterior cruciate ligament injury in men and
women at the United States Naval Academy, (American Journal Sports Medicine,
2000).
Hall, Carrie M.; Lori Thein Brody, Therapeutic Exercise: Moving Toward Function, 2nd
Ed, (Lippincott William and Wilkins, 2000).
Hertel, Jay, Functional Anatomy, Pathomechanics, and Pathophysiology of Lateral Ankle
Instability, (National Athletic Trainers' Association, 2002).
Hosea TM, et al, The gender issue: epidemiology of ankle injuries in athletes who
participate in basketball, (Clinical Orthopaedic, 2000).
Huston, Laura J.; Edward M. Wojtys, Neuromuscular Performance Characteristics in
Elite Female Athletes, (The American Journal of Sports Medicine, volume 24,
1996).
Jaap van der Wal, The Architecture of the Connective Tissue in the Musculoskeletal
System—An Often Overlooked Functional Parameter as to Proprioception in the
Locomotor Apparatus, (International Journal Therapy Massage Bodywork,
Massage Therapy Foundation, 2009).
Konradsen, Lars dan Jesper Bohsen Ravn, Ankle instability caused by prolonged
peroneal reaction time, (Acta Orthopaedic Scandinavia, 1990).
Konradsen, Lars, Factors Contributing to Chronic Ankle Instability: Kinesthesia and
Joint Position Sense National Athletic Trainers' Association, (Inc. Journal Athletic
Training, 2002).
Kubo, Keitaro, et al: Gender differences in the viscoelastic properties of tendon
structures, (European Journal of Applied Physiology, 2002).
Lee, Alex J.Y.; Wei-Hsiu Lin, Twelve-week biomechanical ankle platform system
training on postural stability and ankle proprioception in subjects with unilateral
functional ankle instability, (Clinical Biomechanics, 2008).
Lentell G, et al, The contributions of proprioceptive deficits, muscle function, and
anatomic laxity to functional instability of the ankle. (Journal of Orthopaedic
Sports Physical Therapists, 1995).
Mao, De Wei; et al, Characteristics of Foot Movement in Tai Chi Exercise, (Physical
Therapy, 2006).
Mao, De Wei; et al, The duration and plantar pressure distribution during one leg stance
in Tai Chi Exercise, (Clinical Biomechanics, 2006).
Markam, Soemarmo, Latihan Vitalisasi Otak, (Jakarta: Grasindo, 2004)
McKeon, Patrick; et al, Balance Training Improves Function and Postural Control in
Those with Chronic Ankle Instability, (Medicine & Science in Sports & Exercise,
2008).
Min Chi Chiu, Mao Jiun Wang, The effect of gait speed and gender on perceived
exertion, muscle activity, joint motion of lower extremity, ground reaction force
and heart rate during normal walking, (Gait dan Posture, 2007).
Monaghan, Kenneth; et al, Ankle function during gait in patients with chronic ankle
instability compared to controls, (Clinical Biomechanics, 2005).
Niu W., et al, Biomechanical gender differences of the ankle joint during simulated half-
squat parachute landing. (Aviat Space Environment Medicine, 2010).
Olmsted, Lauren C. et al, Efficacy of the Star Excursion Balance Tests in Detecting Reach
Deficits in Subjects With Chronic Ankle Instability, (National Athletic Trainers'
Association, 2002).
Riemann, Bryan, Is There A Link Between Chronic Ankle Instability and Postural
Instability, (Journal of Athletic Training, 2002).
Ross, Brandi, Proprioceptive Exercises Balance Ankle Stability and Activity: The
Combination of Exercises May Reduce The Chance of Recurrent Ankle Sprains
and Injury, (Biomechanics, 2006).
Tropp H, Odenrick P., Postural control in single-limb stance. (Journal of Orthopaedic,
1988).
Vander, Arthur, et al, Human physiology: the mechanisms of body function, (New York:
Mc Graw Hill, 2001).
Vandervoort, Anthony A.; et al, Age and Sex Effects on Mobility of the Human Ankle,
(Oxford Journal, 1991)
Waterman, Brian et al, Analysis of the epidemiology of ankle sprain has revealed
modifiable and non-modifiable risk factors. Understanding these will allow
practitioners to help athletes minimize their risk of acute injury and chronic
sequelae. (Lower Extremity Review, 2011).
Weinhandl JT, Joshi M, O'Connor KM, Gender comparisons between unilateral and
bilateral landings, (Journal of Applied Biomechanics, 2010)
Wilkerson, Ricky; Melanie Mason, Differences in Men’s and Women’s Mean Ankle
Ligamentous Laxity, (The Iowa Orthopaedic Journal, 2000)
Zeller, Brian L.; et al, Differences in Kinematics and Electromyographic Activity Between
Men and Women during the Single-Legged Squat, 27th annual meeting of the
AOSSM, Keystone (Colorado: 2001)
Related Documents











