Salient features in seismic images Noomane Drissi TELECOM Bretagne- SC department Noomane Drissi Salient features in seismic images 1/25

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Salient features in seismic images
Noomane Drissi
TELECOM Bretagne- SC department
Noomane Drissi Salient features in seismic images 1/25

Outline
1 Introduction to seismic imaging
2 Saliency measure
3 Entropies
4 Tracking
5 Conclusions and perspectives
Noomane Drissi Salient features in seismic images 2/25

Outline
1 Introduction to seismic imaging
2 Saliency measure
3 Entropies
4 Tracking
5 Conclusions and perspectives
Noomane Drissi Salient features in seismic images 3/25

Seismic imaging principle
Noomane Drissi Salient features in seismic images 4/25

Goals of seismic imaging
Earth structure discovery
Hydrocarbon detection
Mining applications
Noomane Drissi Salient features in seismic images 5/25

Use of seismic images
Detection of salient features in seismic images
Horizons
Faults
Gas chimneys...
Method : use of a saliency measure and entropies as a texturalattribute
Noomane Drissi Salient features in seismic images 6/25

Outline
1 Introduction to seismic imaging
2 Saliency measure
3 Entropies
4 Tracking
5 Conclusions and perspectives
Noomane Drissi Salient features in seismic images 7/25

Saliency measure [Kadir 02]
Y(s, x, y) = H(s, x, y)× W(s, x, y) (1)
s is the scale and (x, y) is the pixel locationH measures the unpredictability in the feature spaceW measures the unpredictability of the feature in the scale spaceIf Y(sp, x, y) > λ, then (x, y) is a salient pixel.
Noomane Drissi Salient features in seismic images 8/25
Saliency measure algorithm [Kadir 02]
For every pixel1 Compute the entropy H for s ∈ [smin, smax]
2 Search for the optimal scale sp
3 Compute the inter scale measure W and the saliency Y4 Threshold
Noomane Drissi Salient features in seismic images 9/25

Outline
1 Introduction to seismic imaging
2 Saliency measure
3 Entropies
4 Tracking
5 Conclusions and perspectives
Noomane Drissi Salient features in seismic images 10/25

Shannon Entropy
For a random variable X with a probability density function (pdf) f :
Hs(X) = −∫ ∞
−∞f (t) log f (t)dt (2)
Drawbacks:
X must have a pdf
differential entropy not always positive
nonconformity between the discrete and the continuous case
Noomane Drissi Salient features in seismic images 11/25

Generalized Cumulative Residual Entropy (GCRE)
Let X be a R.V with a complementary distribution function (CCDF)Fc
XThe CRE of X is defined as [Rao 04]
CRE(X) = −∫ ∞
0Fc|X|(t) log Fc
|X|(t)dt (3)
The Generalized Cumulative Residual Entropy is given by [Drissi 07]
HC(X) = −∫ ∞
−∞Fc
X(t) log FcX(t)dt (4)
Noomane Drissi Salient features in seismic images 12/25

Properties
HC is defined for any distribution
HC is non negative
HC is translation invariant
HC(X + a) = HC(X) (5)
Noomane Drissi Salient features in seismic images 13/25

Scale invariance
For distributions with the following property:
∃µ,∀t, FcX(µ + t) = 1 − Fc
X(µ− t). (6)
we get the scale invariance property
HC(aX) = |a|HC(X), (7)
Noomane Drissi Salient features in seismic images 14/25

Real data
10 20 30 40 50 60 70 80 90 100
10
20
30
40
50
60
70
80
90
100
Noomane Drissi Salient features in seismic images 15/25

Remarks
1 Strong reflector: good detection with entropies2 Secondary reflector: better detection with Shannon entropy
Noomane Drissi Salient features in seismic images 16/25

Least square line
y = ax + b is the equation of the least square lineFor every threshold:(xi, yi), i = 1, .., n the coordinates of the detected pixels
Estimation of a and b
Noomane Drissi Salient features in seismic images 17/25
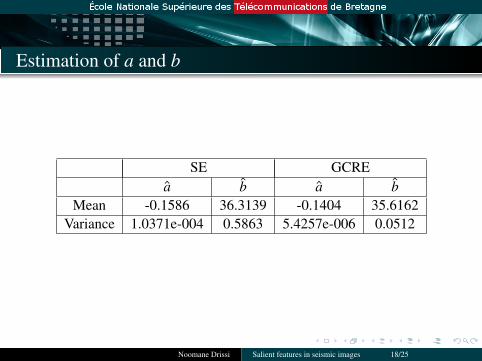
Estimation of a and b
SE GCREa b a b
Mean -0.1586 36.3139 -0.1404 35.6162Variance 1.0371e-004 0.5863 5.4257e-006 0.0512
Noomane Drissi Salient features in seismic images 18/25

Detection using SE (left) and using GCRE (right)
10 20 30 40 50 60 70 80 90 100
10
20
30
40
50
60
70
80
90
10010 20 30 40 50 60 70 80 90 100
10
20
30
40
50
60
70
80
90
100
Noomane Drissi Salient features in seismic images 19/25

Noise effect
σ2b % using HS % using HC
0 100 1000.00001 21.05 44.730.0001 13.15 36.840.001 0 31.570.01 0 21.050.1 0 5.21 0 0
Noomane Drissi Salient features in seismic images 20/25

Outline
1 Introduction to seismic imaging
2 Saliency measure
3 Entropies
4 Tracking
5 Conclusions and perspectives
Noomane Drissi Salient features in seismic images 21/25

Tracking using an active contour
Active contour is a curve C that moves in an image under theminimization of an energy function E
E =
∫ 1
0
12[α|C′
(s)2|+ β|C′′(s)2|] + Eext(C(s))ds (8)
Steps:
initialization (mean square line)
energy minimization
Noomane Drissi Salient features in seismic images 22/25

Active contour fitting the horizon
10 20 30 40 50 60 70 80 90 100
10
20
30
40
50
60
70
80
90
100
Noomane Drissi Salient features in seismic images 23/25

Outline
1 Introduction to seismic imaging
2 Saliency measure
3 Entropies
4 Tracking
5 Conclusions and perspectives
Noomane Drissi Salient features in seismic images 24/25

Conclusions et perspectives
1 extension of a recently introduced entropy2 application to salient features extraction in seismic images3 extraction of other seismic features and use of entropy as a
seismic attribute
Noomane Drissi Salient features in seismic images 25/25
Related Documents











