-
8/12/2019 Report 4correction
1/90
Flux optimization for indirect vector control of induction motor
i
Abstract
The industrial sector is the largest users of energy around the world and induction motor
uses a major fraction of it. Adjustable speed drive system is very important in energy saving
viewpoint. In this project, the rotor flux oriented indirect vector control with flux optimization
is implemented. An indirect vector control method has a good dynamic performance due to
the inherent decoupling between d-axis (flux producing component) and q-axis (torque
producing component) components of current, similar to a separately excited DC machine.
The Induction motor gives maximum efficiency at full load condition, but generally motor is
not fully loaded. The efficiency is less at low load condition. The motor can be operated with
maximum efficiency even at low load condition by altering the flux value. At each load
condition the value of flux can be estimated so that iron and copper losses would remain
same. According to the flux optimization theory, we get the maximum efficiency even at
light load condition by making both copper loss and iron loss equal. Vector control of
induction motor enables the independent control of flux and torque as in dc machine which is
superior. Indirect vector control has very good dynamic performance. The simulation results
of the flux optimization scheme of indirect vector controlled induction motor shows the
validity of the proposed system. The hardware implementation is done for a fractional horse
power motor using DSP, a high speed processor.
-
8/12/2019 Report 4correction
2/90
Flux optimization for indirect vector control of induction motor
ii
Contents
Abstract ........................................................................................................................................ i
List of tables .............................................................................................................................. iv
List of Figures ............................................................................................................................ iv
Abbreviations / Notations / Nomenclature ............................................................................... vii
Chapter 1 .................................................................................................................................... 1
Introduction ................................................................................................................................ 1
1.1 Literature survey ............................................................................................................... 1
Chapter 2 .................................................................................................................................... 3
Mathematical modeling of Induction motor ............................................................................... 3
2.1 Working ............................................................................................................................ 3
2.2 Axes Transformation ........................................................................................................ 4
2.3 Mathematical Model of Induction Motor ......................................................................... 6
Chapter 3 .................................................................................................................................... 9
Vector or Field Oriented Control ............................................................................................... 9
3.1 Introduction ....................................................................................................................... 9
3.2 Working .......................................................................................................................... 10
3.3 Equivalent Circuit and Phasor Diagram ......................................................................... 11
3.4 Principle of Vector Control ............................................................................................. 13
3.5 Indirect Vector Control ................................................................................................... 14
3.6 Flux Optimization Scheme ............................................................................................. 17
Chapter 4 .................................................................................................................................. 20
Matlab Simulation and Results ................................................................................................. 20
4.1 Pulse Width Modulation (PWM) .................................................................................... 20
4.1.1Carrier Based PWM .................................................................................................. 214.1.2 Space Vector PWM .................................................................................................. 21
4.1.3Duty cycle ................................................................................................................. 25
4.2 Space vector PWM Simulation ....................................................................................... 27
4.3 Matlab Simuation ............................................................................................................ 28
4.4 Result .............................................................................................................................. 34
Chapter 5 .................................................................................................................................. 35
Hardware implementation ........................................................................................................ 355.1 .Schematic Block Diagram of the System ...................................................................... 36
-
8/12/2019 Report 4correction
3/90
Flux optimization for indirect vector control of induction motor
iii
5.2 Design of Three Phase Inverter ...................................................................................... 37
5.3 Design of Gate Driver Circuit ......................................................................................... 39
5.4. Design of PCB Layout for Inverter and Gate Driver using CadSofts Eagle software . 40
5.5. Design of Voltage and Current Sensing Circuit ............................................................ 42
5.6 Laboratory Setup of the Complete System ..................................................................... 44
5.7.1Features of the controller........................................................................................... 47
5.7.2 Block diagram of TMS320F28069 .......................................................................... 47
5.7.3 General-Purpose Input /Output (GPIO) ................................................................... 48
5.7.4Event Manager .......................................................................................................... 48
5.7.5ADC .......................................................................................................................... 49
5.7.6 PWM ........................................................................................................................ 49
5.7.7 Calculating PWM Period and Frequency ................................................................. 50
Chapter 6 .................................................................................................................................. 52
HARDWARE RESULTS ......................................................................................................... 52
6.1 Calculation of TBPRD for ePWM module of TMS320F28069 ......................................... 52
6.2:Testing and Calibration of Current and Voltage Sensing Board .................................... 53
Chapter 7 .................................................................................................................................. 57
Conclusion and future scope..................................................................................................... 57
Conclusion ............................................................................................................................ 57
Future Scope ......................................................................................................................... 58
References ............................................................................................................................. 59
Published paper ..................................................................................................................... 60
Appendix I - LEM Current Sensor data sheet ....................................................................... 77
Appendix IIIGBT data sheet ............................................................................................. 78
Acknowledgement ................................................................Error! Bookmark not defined.
-
8/12/2019 Report 4correction
4/90
Flux optimization for indirect vector control of induction motor
iv
List of tables
TABLE. 1:The switching time of the active vector for each sector...................................................... 25
TABLE. 2:Duty time for each sector.................................................................................................... 26
TABLE. 3: Power At Different Load Condition............................................................................ 34
TABLE. 4:Components used for hardware setup of three phase inverter............................................. 38
TABLE. 5:Specifications of the power circuit...................................................................................... 39
-
8/12/2019 Report 4correction
5/90
Flux optimization for indirect vector control of induction motor
v
List of Figures
Fig.2. 1 : Stationary frame a-b-c to ds-qs axes transformation................................................................5
Fig.2. 2:Stationary frame ds - qs to synchronously rotating frame d e - qe transformation.....................6
Fig.2. 3: Equivalent two-phase transformation........................................................................................7
Fig.2. 4: Equivalent circuit of Induction Machine in de- q
eframe...........................................................8
Fig.3. 1: Separately excited dc machine................................................................................................ 10
Fig.3. 2: Vector-controlled induction machine..................................................................................... 11
Fig.3. 3:Complex (qds) equivalent circuit in steady state..................................................................... 12
Fig.3. 4:Steady-state phasor diagram with increase of (a) torque component of current (b) flux
component of current............................................................................................................................ 12
Fig.3. 5:Vector control implementation principle with machine de-qe model..................................... 13
Fig.3. 6 :Phasor diagram with stator flux oriented control.................................................................... 14
Fig.3. 7:Block diagram of indirect vector control of induction motor.................................................. 16
Fig.4. 1: The reference vector in the two and three dimensional plane................................................. 22
Fig.4. 2: Space voltage vectors in different sectors............................................................................... 23
Fig.4. 3:Simulink model of SV PWM technique.................................................................................. 27
Fig.4. 4: Sector selection of SVPWM................................................................................................... 28
Fig.4. 5: Time period of SVPWM (Ta)................................................................................................. 28
Fig.4. 6:MATLAB simulink model of flux optimization of indirect vector control of induction motor
............................................................................................................................................................... 30
Fig.4. 7: Simulink model of Theta and flux calculator......................................................................... 30
Fig.4. 8: Matlab simulink model of reference value of current............................................................. 31
Fig.4. 9:Actual and reference speed (1430 rpm)................................................................................... 32
Fig.4. 10: Actual and reference torque (At 5Nm)............................................................................. 32
Fig.4. 11: Reduction in the rotor flux after flux optimization at 2.5 sec for torque 5 Nm.................... 33
Fig.4. 12: Reduction in the input power after flux optimization at 2.5 sec for torque 5 Nm................ 33
Fig.5. 1:Block diagram of implemented control algorithm................................................................... 36
Fig.5. 2: Opto-coupler based IGBT Gate driver HCPL-3120............................................................... 39
Fig.5. 3: Gate driver circuit for inverter switches................................................................................. 40
Fig.5. 4:PCB layout of inverter section................................................................................................. 41
Fig.5. 5: Photograph of hardware of three phase inverter and gate driver with isolated supply........... 41
Fig.5. 6: PCB layout of sensing board.................................................................................................. 43
Fig.5. 7 :Component view of sensing board.......................................................................................... 44
Fig.5. 8 : Laboratory setup.................................................................................................................... 45
Fig.5. 9:Flow chart of program for Vector control................................................................................ 46
-
8/12/2019 Report 4correction
6/90
Flux optimization for indirect vector control of induction motor
vi
Fig.5. 10: Block Diagram of TMS320F28069...................................................................................... 47
Fig.5. 11: Image of experimental kit of TMS320F28069..................................................................... 48
Fig.5. 12 : Sub-modules of an ePWM Module...................................................................................... 50
Fig.6. 1: (a) PWM pulse of 1A& 1B with frequency of 10 KHz and (b) expanded view of pulse....... 53
Fig.6. 2:Level shifted waveforms at no load condition of Induction motor a) sensed voltageb)sensed
current................................................................................................................................................... 54
Fig.6. 3:(a) Sensed current waveform b ) Sensed voltage waveform................................................... 55
Fig.6. 4: (a) Space Vector Modulated PWM gate pulses (b) Motors single phase output terminalvoltages after filtering........................................................................................................................... 55
Fig.6. 5: CCS-4 Screen shot indicating sector selection of space vector modulation........................... 56
Fig.6. 6:CCS-4 Screen shot indicating torque and flux estimation based on measurement of actual
motor terminal voltages and currents.................................................................................................... 56
-
8/12/2019 Report 4correction
7/90
Flux optimization for indirect vector control of induction motor
vii
Abbreviations / Notations / Nomenclature
S,r=Stator and rotor indices
X : Components in the stationary frame axes
Xdq: Components in the synchronous reference frame dq axes
X* : Reference value
Rs,Rr : Stator and rotor resistances
Ri : Iron loss resistance
Ls,Lr :Stator and rotor inductances
Lls, Llr: Stator and rotor leakage inductancer: Rotor time constant (r= Lr/Rr): Leakage flux total coefficient ( = 1Lm2/ LsLr )
Lm: Magnetizing inductance
s, r : Stator and rotor fluxm : Magnetizing fluxs : Stator pulsation (rd/s)
r : Rotor speed (rd/s)
p: Number of pairs poles
s : slip
sl: Slip frequency (rd/s);
J : Motor Inertia
fvis : Viscous Coefficient
TL: Load torque
Tem : Electromagnetic torque
Pcs, Pcr : Stator and rotor copper losses.
Pi : Iron losses.
IFOC : Indirect Flux Oriented Control
IM: Induction Motor
-
8/12/2019 Report 4correction
8/90
Flux optimization for indirect vector control of induction motor
1
Chapter 1
Introduction
1.1 Literature survey
Induction motors are mostly used in industrial application due to their high performance,
robustness, efficiency and cost. More than 40% of the total electric energy generated isconsumed by electric motors. Recently, the concern about the enormous use of electrical
energy and its adverse impact on the environment is growing. Generally induction motor is
designed to have maximum efficiency near full load. At light load condition, the copper loss
is less compared to iron loss and the efficiency is poor [1]. So an attempt is made to increase
the efficiency of an induction motor even at light loads by the flux optimization method.
An indirect vector control method has a good dynamic performance due to the
inherent decoupling between d-axis (flux producing component) and q-axis (torque producing
-
8/12/2019 Report 4correction
9/90
Flux optimization for indirect vector control of induction motor
2
component) components of current, similar to a separately excited DC machine. Efficiency of
the motor can be increased by means of loss reduction which can be done by the following
methods; 1) Appropriate motor selection and design; 2) Improved waveform supplied by the
inverter; 3) Using suitable control method. Generally, motor is designed to have maximum
efficiency at rated conditions [2]. Mostly motor operates at other than rated conditions. Under
these conditions, it is not possible to improve the machine efficiency by machine design or by
waveform shaping technique; hence it is necessary to go for the suitable control algorithm [2].
The control method or the control strategy to improve the efficiency can be divided
into two categories 1) Search controller 2) Loss model based controller [3]. The basic
principle of search controller is to measure the input power and then iteratively search the flux
until the minimum power is detected for given torque and speed [4]. For this vector drive, the
flux is reducing in small steps to reach the optimum condition, and the problem is an increase
in the time of convergence and the torque pulsation during the search process. In fuzzy logic
based search controller method, we speed up the convergence time, but we want to use
compensator for torque pulsation problem [5]. In the Golden section based search algorithm,
we can improve the convergence time, but the problem is selecting the upper and lower limit
of flux producing current before the algorithm start. To get acceptable dynamic performance
and to increase the speed of search, prior knowledge of drive system is required [6].
The advantage of loss model based approach is that it is faster than the other method.
Optimum flux is decided by the machine model and extra filter and sensor not required to get
the power input. Torque ripple is less compared to the other method [6].
-
8/12/2019 Report 4correction
10/90
Flux optimization for indirect vector control of induction motor
3
Chapter 2
Mathematical modeling of Induction motor
This chapter covers the mathematical model of induction motor in synchronously
rotating reference frame.
2.1 Working
When 3-phase stator winding is energized from a 3-phase supply, a rotating magnetic
field is set up which rotates round the stator at synchronous speed Ns (= 120 f/P).The rotating
field passes through the air gap and cuts the rotor conductors, which as yet, are stationary.
Due to the relative speed between the rotating flux and the stationary rotor, e.m.f.s are
induced in the rotor conductors. Since the rotor circuit is short-circuited, currents start flowing
in the rotor conductors. The current-carrying rotor conductors are placed in the magnetic field
-
8/12/2019 Report 4correction
11/90
Flux optimization for indirect vector control of induction motor
4
produced by the stator. Consequently, mechanical force acts on the rotor conductors. The sum
of the mechanical forces on all the rotor conductors produces a torque which tends to move
the rotor in the same direction as the rotating field.
2.2 Axes Transformation
In many applications, the dynamic behavior of the induction machine has an important
effect upon the overall performance of the system. The dynamic performance of an ac
machine is complex because the three phase rotor windings move with respect to the three
phase stator windings. The machine model can be described by differential equations with
time varying mutual inductances, but such a model tends to be very complex. The three phase
machine can be represented by an equivalent two-phase Machine i.e. a-b-c to d-q
transformation. In the1920s, to overcome the problem of time varying parameters, R.H. Park
proposed a new theory of electrical machine analysis. He transformed or referred the stator
variables (voltages, currents and flux linkages) to a synchronously rotating reference frame
fixed on the rotor. Later, in the 1930s, H.C. Stanley showed that time varying inductances in
the voltage equations of an induction machine due to electric circuits in relative motion can be
eliminated by transforming the rotor variables to variables associated with fictitious stationary
windings. Later, G. Kron proposed a transformation of both stator and rotor variables to a
synchronously rotating reference frame that moves with the rotating magnetic field. A proper
model for the three phase induction machine is essential to simulate and study the complete
drive system.
Consider a symmetrical three-phase induction machine with stationary as-bs-cs axes at
2/3-angle apart as shown in Figure 2.1. We have to transform the three phase stationary
reference frame (as-bs-cs) variables into two-phase stationary reference frame ( ds - qs )
variables and then transform these to synchronously rotating reference frame (de - qe ), and
vice versa. Assuming that the ds - qs axes are oriented at angle, as shown in Figure 2.1, the
voltages Vdss andVqs
scan be resolved into as-bs-cs components and can be represented in the
matrix form as
-
8/12/2019 Report 4correction
12/90
Flux optimization for indirect vector control of induction motor
5
qs-axis
ds-axis
as
cs
bs
vbs
vcs
vas
Fig.2. 1 : Stationary frame a-b-c to ds-qs axes transformation
=
The corresponding inverse relation is
Where Voss is added as the zero sequence component, which may or may not be
present. We have considered voltage as variable. The current and flux linkages can be
transformed by similar equations. Figure 2.2 shows the synchronously rotating de qe axes,
which rotate at synchronous speed ewith respect to the dsqs axes and the angle e=e t.
-
8/12/2019 Report 4correction
13/90
Flux optimization for indirect vector control of induction motor
6
ds
de
qs
qe
V
e
e =et
e
Vds=-Vm sin()
Vqs=Vm cos()
Vqs=Vm cos(e+)
Vqs=-Vm sin(e+)
Fig.2. 2:Stationary frame ds - qs to synchronously rotating frame de - qe transformation
The two-phase ds - qs windings are transformed into the hypothetical windings
mounted on the d e - q e axes. The voltages Vdss and Vqs
s can be resolved into de - qe
components and can be represented in matrix form as
[] [ ] [ ]
For convenience, the superscript e has been dropped from the synchronously rotating
frame parameters. The corresponding inverse relation is
[ ] [ ] []
2.3 Mathematical Model of Induction Motor
When the motor operates in both steady and transient states, the standard induction
motor equivalent model can be used to calculate machine variables such as stator current,
-
8/12/2019 Report 4correction
14/90
Flux optimization for indirect vector control of induction motor
7
rotor current, developed torque, etc. The induction motor can be modeled with stator current
and flux. In FOC the motor is modeled in synchronously rotating reference frame i.e. =e
Consider the two-phase machine shown in Figure 2.3, we need to represent both (d sqs) and
(d rqr) circuits and their variables in a synchronously rotating (deqe) frame.
ds-axis
r
dr-axis
qr-axis
qs-axis
Fig.2. 3: Equivalent two-phase transformation
We can write the following stator circuit equations
(2.1)sqsdt
dsR
sqsI
sqsv
(2.2)sds
dt
dsR
sds
Isds
v
Wheresds and
sqs are q-axis and d-axis stator flux linkages. When these equations are
converted to de-qe frame:
(2.3)eds
eeqsdt
dsR
eqsIv
eqs
(2.4)eqseedsdt
dsR
eds
Ieds
v
Where, all variables are in rotating form. If the rotor is not rotating, r= 0, the rotorequations are:
-
8/12/2019 Report 4correction
15/90
Flux optimization for indirect vector control of induction motor
8
(2.5)edre
eqrdt
dRr
eqrI
eqrv
(2.6)eqreedr
dt
dRr
edr
Iedr
v
Where, all variables and parameters are referred to the stator. In de-qe frame, the rotor
equations are:
)7.2(edr
)r
ej(eqr
dt
drR
eqrIv
eqr
)8.2(eqr)rej(
edr
dt
drR
edr
Ivedr
The flux linkage equations in terms of the currents are:
(2.9))eqr
Ieqs
(Im
Leqs
Ils
Leqs
(2.10))edr
Ieds
(Im
Leds
Ils
Leds
(2.11))eqr
Ieqs
(Im
Leqr
Ilr
Leqr
(2.12))
e
drI
e
ds(ImL
e
drIlrL
e
dr
The torque equations of induction motor are given by:
(2.13)rdt
dJ
lT
eT
(2.14)esd
Iesq
esq
Iesd
2
P
2
3
eT
Where, Tl is load torque, r is electrical speed. Fig 2.4 shows de-qe equivalent model of
induction motor .
Fig.2. 4: Equivalent circuit of Induction Machine in de- q
eframe
R
qd
qd
Lie-
V d
I d
V dr
-
8/12/2019 Report 4correction
16/90
Flux optimization for indirect vector control of induction motor
9
Chapter 3
Vector or Field Oriented Control
This chapter includes the working principle of indirect vector of induction motor
followed by the flux optimization technique of induction motor
3.1 Introduction
The scalar control technique is simple to implement, but due to inherent coupling
effect i.e. both torque and flux are functions of voltage or current and frequency, gives
sluggish response due to which the system becomes easily prone to instability because of
higher order system effect. This problem can be solved by vector or field-oriented control. By
this control technique the induction machine can be controlled like a separately excited dc
machine. Because of dc machine-like performance, vector control is also known as
-
8/12/2019 Report 4correction
17/90
Flux optimization for indirect vector control of induction motor
10
decoupling, orthogonal, or transvector control. Vector control is applicable to both induction
and synchronous machine drives.
3.2 Working
Consider the separately excited dc machine as shown in Figure 3.1. The developed
torque is given by
Ia
If
y
yf
aIa
If
Decoupled yafTe=kt =k'tIaIfy
Torque
ComponentField
Component
Fig.3. 1: Separately excited dc machine
Te=KtIaIf
Where Ia= armature current and If=field current. The construction of dc machine is
such that the field flux f produced by current If is perpendicular to the armature flux a,
which is produced by armature current Ia. These space vectors, which are stationary in space,
are orthogonal or decoupled in nature. This means that when torque is controlled by
controlling the currentIa, the flux f is not affected.
DC machine-like performance can also be extended to an induction motor if the
machine control is considered in a synchronously rotating reference frame ( de and qe), where
the sinusoidal variables appear as dc quantities in steady state. Figure 3.2 shows the induction
machine with the inverter and vector control with the two control current inputs, i ds* and
-
8/12/2019 Report 4correction
18/90
Flux optimization for indirect vector control of induction motor
11
iqs*With vector control, ids is analogous to field current If and iqs is analogous to armature
currentIaof a dc machine.
ids
yr
we
Te=k'tidsiqs
Iqs*
Ids*
Vector
control Inverter IM
Torque
ComponentField
Component
Fig.3. 2
Fig.3. 2: Vector-controlled induction machine
Therefore, the torque equation can be expressed as
Te=Ktr iqs
or
Te=Ktidsiqs
The dc machine like performance is only possible if the ids is aligned in the direction
of r and iqs is established perpendicular to it. This means that when iqs* is controlled, it
affects the actual iqs current only, but does not affect the flux r . Similarly when ids*is
controlled, it controls the flux only .does not affect the iqscomponent of current.
3.3 Equivalent Circuit and Phasor Diagram
Consider the de-qe equivalent circuit diagram of induction motor in steady state
condition as shown in fig.3.3 The rotor leakage inductance Llr is neglected for simplicity,
-
8/12/2019 Report 4correction
19/90
Flux optimization for indirect vector control of induction motor
12
which makes the rotor flux r the same as the air gap flux m. the stator current Is can be
expressed as
( )ids= magnetizing component of stator current flowing through the inductanceLm and iqs=torquecomponent of stator current flowing in the rotor circuit. Figure 3.4 shows phasor diagrams in
deqe frame with peak value of sinusoids and air gap voltage Vmaligned on the qe axis. The
in-phase or torque component of current iqs contributed active power across the air gap,
whereas the reactive or flux component of stator current contributed only reactive power.fig
3.4(a) shows an increase of the iqscomponent of stator current to increase the torque while
maintaining the flux rconstant whereas fig 3.4(b)shows weakening of flux by reducing the
idscomponent.
Rs
Lm
iqs
ids
Fig.3. 3
Fig.3. 3:Complex (qds) equivalent circuit in steady state
'
de axis
qe
axis
i'qs
iqs
i'sis
'
deaxis
iqsids
i's
is
qeaxis
(a) (b)
Fig.3. 4:Steady-state phasor diagram with increase of (a) torque component of current (b) fluxcomponent of current
-
8/12/2019 Report 4correction
20/90
Flux optimization for indirect vector control of induction motor
13
3.4 Principle of Vector Control
The fundamental of vector control implementation can be explained with the help of
Figure 3.5.where the machine model is represented in a synchronously rotating reference
frame. The inverter is omitted from the figure, assuming that it has unity current gain, that is,
it generates currents ia, ib, and ic as dictated by the corresponding command currents ia*,ib
*and
ic*from the controller. A machine model with internal conversion is shown on the right. The
machine terminal phase currents ia, ib, and ic are converted to ids and iqs components by 3
to2 transformation. These are then converted to synchronously rotating frame by the unit
vector components cose and sinebefore applying them to the de- qe machine model as
shown. The controller makes two stages of inverse transformation, so that the control currents
ids*and iqs*correspond to the machine currents ids and iqs respectively. In addition, the unit
vector assures correct alignment of ids current with the flux vector rand iqsperpendicular to
it. There are essentially two general methods of vector control. One, called the direct or
feedback method, was invented by Blaschke and the other known as the indirect or feed-
forward method was invented by Hasse. These two methods are different essentially by how
the unit vector is generated for the control.
Inverse
transformation
Transformation
Control Machine
Ids
IqsIqss*
Idss*
Ia*
Ib*
Ic*
Ia
Ib
IcIqss
Idss
Cose sine sineCose
ds-q
s
To
a-b-c
de-q
e
To
ds-q
s
a-b- c
To
ds-q
s
ds-q
s
To
de-q
e
Machine
de-q
e
model
Machine
Terminal
Fig.3. 5:Vector control implementation principle with machine de-qe model
-
8/12/2019 Report 4correction
21/90
Flux optimization for indirect vector control of induction motor
14
3.5 Indirect Vector Control
The indirect vector control method is essentially the same as the direct vector control,
except that the rotor angle e is generated in an indirect manner (estimation) using the
measured speed r and the slip speed sl. Figure 3.6. explains the fundamental principle of
indirect vector control with the help of phasor diagram. The ds-qs axes are fixed on the stator,
but the dr-qr axes, which are fixed on the rotor, are moving at speed r as shown in fig .3.6.
Synchronously rotating axes de-qe is rotating ahead of the dr-qr axes by the positive slip angle
sl corresponding to slip frequency sl. Since the rotor pole is directed on the de axis and
e=r+sl,
slrrslee dt www )( (3.1)
The phasor diagram suggests that for decoupling control, the stator flux component of
current ids should be aligned on the de axis, and the torque component of current iqs should be
on the qe axis as shown in Figure.
Fig.3. 6 :Phasor diagram with stator flux oriented control
The rotor circuit equation can be written as
0)( qrredrrdr iR
dt
dyww
y
(3.2)
-
8/12/2019 Report 4correction
22/90
Flux optimization for indirect vector control of induction motor
15
0)( drreqrrqr
iRdt
dyww
y
(3.3)
Where Rris rotor resistance ,
The rotor flux linkage equation can be written as
dsmdrrdr iLiL y (3.4)
qsmqrrqr iLiL y (3.5)
Where Lr is rotor inductance, Lm is magnetizing inductance.
From the above we can write
ds
r
m
r
dr
dr iL
L
Li
y
(3.6)
qs
r
m
r
qr
qr iL
L
Li
y
(3.7)
From (3.2) to (3.7), we can write
0 qrsldsrr
m
dr
r
rdr iR
L
L
L
R
dt
dywy
y
(3.8)
0 drslqsrr
m
qr
r
rqr iRL
L
L
R
dt
dywy
y
(3.9)
Where idsand iqsis dq axis equivalent stator current, idrand iqr is dq axis equivalent rotor
current
For decoupling, we can write
0qry (3.10)
rdr yy (3.11)
0dt
d qry
(3.12)
So that rotor flux ry is directed on deaxis.
Substitute (3.10) ,(3.11),and (3.12) in (3.8) and (3.9), then we get,
)1( s
iL
r
dsmr
y
(3.13)
-
8/12/2019 Report 4correction
23/90
Flux optimization for indirect vector control of induction motor
16
Electromagnetic torque can be calculated by
)(22
3qsdr
r
m
e iL
LpT y
(3.14)
The calculation of iq* and id* as reference current torque and flux component respectively is
as following
)(22
3 **qs
r
m
e iL
LpT
dry
(3.15)
m
rd
Li y
* (3.16)
r
e
m
r
qT
L
L
pi
y
** 232
(3.17)
From the above equations, we can implement the indirect vector control of induction motor
SVPWM
INVERTERIM
Optimum
flux
dq to abc
Iabc
Iq
Id
IdFlux
Flux
Te*Te
*r
*
r
r
Flux
Id* PI-2
PI-3
Id
Iq TL
Iabc
r
Te
+
+
-
-r*
PI-1
Fig.3. 7:Block diagram of indirect vector control of induction motor
In the above given scheme the whole control structure consists of a speed control loop
and two current control loops. In the speed control loop the rotor speed is compared with the
reference speed and the speed error is then fed to the PI-controller (PI-1) which generates the
reference torque T*. according to equation (3.15) we get the reference iqs* from reference
torque Then in the current control loop the current error is generated by comparing the current
-
8/12/2019 Report 4correction
24/90
Flux optimization for indirect vector control of induction motor
17
iqswith its reference value and the error is then given to a PI controller (PI-3) . The output of
PI-3 gives the reference quadrature axis voltage command vqs*. Similarly for the direct axis
current control loop the reference value for rotor flux is generated from the optimum
mathematical model optimum flux. According to equation (3.16) we get the reference
command ids*. The direct axis current error is generated by comparing ids with its reference
value and the error is then fed to a PI controller (PI-2). The output of controller PI-2 gives the
reference direct axis voltage command Vds*.
3.6 Flux Optimization Scheme
Operation of the induction motor is efficient at rated load and rated flux, but at light
load condition the efficiency of the motor is less. So to improve the efficiency of the machine
it is necessary to apply the optimal rotor flux reference value which satisfies the condition, the
copper loss equals the iron loss. Optimal rotor flux can be calculated based on the machine
model by equating the derivative of the total losses with respect to the rotor flux to zero.
From the equivalent circuit of induction motor, the total machine losses can be written as
follows [8][9].
Stator cu loss= )(2
33 222 qsdsSsscs iiRIRP
(3.18)
Rotor cu loss= )(3 22 qrdrrcr iiRP (3.19)
Iron loss = ))((2
33 222 qmdm
i
emiiii ii
R
LRIRP
w
(3.20)
icrcs ppplosses (3.21)In synchronously rotating frame we get
dsmdrrdr iLiL y (3.22)
qsmqrrqr iLiL y (3.23)
The perfect decoupling is achieved by
0qry (3.24)
-
8/12/2019 Report 4correction
25/90
Flux optimization for indirect vector control of induction motor
18
rdr yy (3.25)
Then from rotor field oriented indirect vector control of induction motor we can write
0dri (3.26)
qs
r
mqr i
L
Li
(3.27)
Put value of iqr, idrin the losses equation, then we get
))((2
3)(3)(
2
3 222222qmdm
i
emiqsdsrcrqsdsS ii
R
LRiiRPiiRlosses
w (3.28)
where Rsis stator resistance, Ri is iron loss resistance.
The stator dq current components are
qm
lr
rr
i
eqs i
L
L
Ri y
w
(3.29)
qm
i
emr
m
ds iR
L
Li
wy
1
(3.30)
Substitute (29) and (30) in (28), then
][)(2
3)(
2
3)()[(
2
3 22
222222
qm
m
r
i
emiqm
lr
mrqm
lr
rr
i
eqm
i
em
m
rS i
LR
LRi
L
LRi
L
L
Ri
R
L
LRLosses ywywwy
(3.31)
Where Llr is rotor leakage inductance.
From (3.26) and (3.27) we can write,
qmr
lr
mqrrqsr
r
mem i
L
Lpipi
L
LpT yyy (3.32)
where p is number of pair poles.
After simplification, we get,
2
2
2 ))(()()()(r
emeemere
TcTbalosses
ywwyw
(3.33)
where
])([2
3)(
2
2
2
i
eis
m
ss
RRR
L
Ra
ww
,
-
8/12/2019 Report 4correction
26/90
Flux optimization for indirect vector control of induction motor
19
S
esS
pR
Rb
ww
3)(
])([2
3
)( 22
22
1
222
2
i
er
rS
r
m
rS
S Rp
l
RRp
R
Lp
LR
c
w
w
To get the optimum flux, partial derivative of (3.33) with respect to rotor flux
01
)(2)(20)(
3
2
r
emere
r
TcaLosses
ywyw
y
Then
emr Ty (3.34)
Where
4
a
c
The flux value is a function of the electromagnetic torque and the coefficient, which
depends on the machine parameters. So the optimum flux can be estimated as a function of
torque and speed of the machine.
-
8/12/2019 Report 4correction
27/90
Flux optimization for indirect vector control of induction motor
20
Chapter 4
Matlab Simulation and Results
This chapter throws light on the Matlab simulation of the system and the comparative
result of with optimization and without optimization of flux for indirect vector control. The
voltage source inverter and the control technique of different pulse width modulation is
explained in the following..
4.1 Pulse Width Modulation (PWM)
The main purpose of these topologies is to provide a three phase voltage, where the
amplitude, phase, and frequency are always controlled. The voltage source inverter converts
dc power to three-phase ac power by means of switching power electronic switches. The
power flow in each phase is controlled by duty cycle of the PWM pulses. To obtain a suitable
duty cycle an appropriate pulse width modulation technique is used. The harmonic content of
the voltage (current) and electromagnetic interference generated in the inverter fed drive
-
8/12/2019 Report 4correction
28/90
Flux optimization for indirect vector control of induction motor
21
depends on the modulation technique selected. The advantage of PWM is that power loss in
switching device and harmonics content in output voltage is low .The different types of PWM
methods are as follows:
4.1.1Carrier Based PWM
In this method, the sinusoidal signal is compared with a carrier wave. This method is
the most widely used method of pulse width modulation and is also known as sinusoidal
PWM. In this method three reference sinusoidal signals are compared with triangular carrier
signal Vt which is common to all three phases. In this way the logical signals SA, SB, SC are
generated, which define the switching instants of the power transistors. To generate a
sinusoidal output voltage waveform at a desired frequency a sine wave at desired frequency is
compared with triangular waveform. The frequency of inverter is same as that of the
triangular waveform. The modulation index m is defined as:
VtVmm
Modulation index m can be varied between 0 and 1 to give a linear relation between
the reference and output wave. At m=1, the maximum value of fundamental peak voltage is
Vdc/2 which is 78.55% of the peak voltage of the square wave where, V m is peak value of
modulating wave and Vt is peak value of carrier wave. Comparing with the Sine PWM, the
output voltage utilization is more in SVPWM. Harmonic contents are also less in SVPWM sothat Space Vector PWM is preferred
4.1.2 Space Vector PWM
Space vector technique is rotating voltage vector. The 3-phase voltage output of the
inverter could be represented by equivalent vector Vrefwhich is represented in a plane this
-
8/12/2019 Report 4correction
29/90
Flux optimization for indirect vector control of induction motor
22
two phase stationary reference plane which is transformed from 3 phase abc plane. Location
of Vrefin plane decides the switching position of the inverter (ON ,OFF) . Magnitude ofVref is equal to magnitude of the inverter output voltage. Time taken by V refto complete one
revolution is fundamental time period of the output voltage .
For balanced load condition
0 coboao VVV (4.1)
The instantaneous phase voltages are
)sin( tVV ma w (4.2)
)120sin( tVV mb w (4.3)
)120sin( tVV mb w (4.4)
Transformation of abc plane to two phase stationary reference frame
)
22
(
3
2 bba
VVVV
(4.5)
)(3
1cb VVV (4.6)
Vref
V
V
Va
Vb
VC
Fig.4. 1: The reference vector in the two and three dimensional plane
Magnitude and angle of reference voltage is
-
8/12/2019 Report 4correction
30/90
Flux optimization for indirect vector control of induction motor
23
22
VVVref (4.7)
)(tan1
V
V
(4.8)
Switches can be ON or OFF means 1 or 0.lower switches are complimentary of upper
switches, so possible combinations of switching states 000,001,010,011,100,101,110,111. V0
is 000 means all lower switches(4,2,6) are ON and v7is 111 means all upper switches (1,3,5)
are ON . SVPWM has eight vectors in which six are active vectors (V1-V6) and two are null
vectors (V0,V7). After joining all the six vectors a regular hexagon is formed as shown in fig
4.9
Fig.4. 2: Space voltage vectors in different sectors
TC is the sampling period of Vref. Sampling period is divided into tree intervals
T1,T2,T0. Suppose V1amount of voltage is applied for T1 sampling period and V2amount of
voltage is applied for T2sampling period and zero voltage is applied for rest of the sampling
period T0=Tc-T1-T2
Theta is the position of Vrefwith respect to V1. Volt sec balance produced by vector V1,V2are
same as those produced by Vref
002211 *** TVTVTVVref (4.8)
-
8/12/2019 Report 4correction
31/90
Flux optimization for indirect vector control of induction motor
24
ccc
crefT
TV
T
TV
T
TVTV 00
22
11 **** (4.9)
The total cycle is given by:
021 TTTTc (4.10)
The position of Vref,V1,V2and V0can be described with its magnitude and angle:
j
refref eVV * dcVV *
3
21
,
32 **
3
2
j
dc eVV
00V (4.11)
Calculation of each duration time
dcdcrefC VTVTVT *3
1**
3
2*)cos(** 21
(4.12)
dcrefC VTVT *3
1*)sin(** 2
(4.13)
After simplification we get T1and T2time as
)3
sin(**)3
sin(**3
*1
aTV
VTT c
dc
ref
c
(4.14)
)sin(**)sin(**3
*2 aTV
VTT c
dc
ref
c (4.15)
The general calculation to get the duty times in the rest of the sectors is given by
)]sin()3
cos()cos()3
[sin(**)*3
1
3sin(**1
nnaT
naTT cc
(4.16)
)]sin()3
1
cos()cos()3
1
sin([**)3
1
sin(**2
nn
aT
n
aTT cc (4.17)
-
8/12/2019 Report 4correction
32/90
Flux optimization for indirect vector control of induction motor
25
210 TTTT c (4.18)
Choosing nas the number of the sector (n=1,2,3,4,5,6) the calculations for the time duration
in each sector can be calculated
TABLE. 1:The switching time of the active vector for each sector.
SECTOR T1 T2 T0
1V
V
TT
d
C 31 )3(
2
32 VV
V
TT
d
C
TO=TC-T1-T2
2 )3(2
31 VV
V
TT
d
C )3(2
32 VV
V
TT
d
C TO=TC-T1-T2
3V
V
TT
d
C 31 )3(
2
32 VV
V
TT
d
C TO=TC-T1-T2
4 VV
TT
d
C 31 )3(2
32 VV
V
TT
d
C TO=TC-T1-T2
5 )3(2
31 VVV
TT
d
C
)3(23
2 VVV
TT
d
C
TO=TC-T1-T2
6V
V
TT
d
C 31 )3(2
32 VV
V
TT
d
C TO=TC-T1-T2
4.1.3Duty cycle
For each sector there are seven switching states for each cycle. It always starts and
ends with a zero vector. For sector 1 it goes through these switching states: 000-100-110-111-
110-100-000, one round and then back again. This is during the time Tc and it has to be
divided into the seven switching states, three of them being zero vectors.
4222224
0120120 TTTTTTTTC (4.18)
-
8/12/2019 Report 4correction
33/90
Flux optimization for indirect vector control of induction motor
26
TABLE. 2:Duty time for each sector
SECTOR UPPER SWITCH DUTY TIME LOWER SWITCH DUTY TIME
1
S12
021
TTT
S2
2
0T
S32
0
2
TT
S4
2
0
1
TT
S52
0T
S6
2
021
TTT
2
S120
2 TT
S220
1 TT
S32
021
TTT
S4
2
0T
S52
0T
S6
2
021
TTT
3
S12
0T
S2
2
021
TTT
S3
2
021
TTT
S4
2
0T
S52
0
2
TT
S6
2
0
1
TT
4
S12
0T
S2
2
021
TTT
S32
0
2
TT
S4
2
0
1
TT
S52
021
TTT
S6
2
0T
5
S12
0
2TT
S2
2
0
1TT
S32
0T
S4
2
021
TTT
S52
021
TTT
S6
2
0T
6
S12
021
TTT
S2
2
0T
S32
0T
S4
2
0
21
TTT
-
8/12/2019 Report 4correction
34/90
Flux optimization for indirect vector control of induction motor
27
S52
0
2
TT
S6
2
0
1
TT
4.2 Space vector PWM Simulation
Fig 4.3 shows simulation block diagram of SVPWM implemented in simulink model
of MATLAB to control the inverter. Fig.4.4 shows the sector selection of inverter circuit.Fig.4.5 shows time period of switching instant of inverter
Fig.4. 3:Simulink model of SV PWM technique
-
8/12/2019 Report 4correction
35/90
Flux optimization for indirect vector control of induction motor
28
Fig.4. 4: Sector selection of SVPWM
Fig.4. 5: Time period of SVPWM (Ta)
4.3 Matlab Simuation
The control system block diagram is shown in fig. 3.7 simulated for induction motor
in MATLAB /simulink (version 7.1 R2010a). The simpower system is used for modelingwork. Simpower system has libraries of electrical machine and power electronics circuits.
-
8/12/2019 Report 4correction
36/90
Flux optimization for indirect vector control of induction motor
29
Motor parameter used for simulation:
Rated Power = 4000 W,
Rated Voltage = 400 Volts,Frequency = 50 Hz,
Number of poles =4,
Stator Resistance = 1.405 ,
Stator Leakage Inductance = 0.005839 Henry,
Rotor Resistance referred to stator = 1.395 ,
Rotor Inductance referred to stator = 0.005839 Henry,
Mutual Inductance = 0.1722 Henry.
With reference to the Fig.4.6 the whole model can be divided into Induction motor
model, Two level inverter ,Space vector modulation ,Torque and flux estimation .The torque
and flux value estimated from the equation (3.14) and (3.13) and compared with reference
value .The error is passed through the PI regulator to get the reference voltage Vabc and that
reference value is used to trigger the inverter switches with SVPWM control technique.
Fig 4.7 shows simulink model of theta calculator and actual flux value. Sensed current is
converted into two phase rotating frame (id and iq component). From equation 3.13 we can
calculate actual flux and theta using relation of id, iq and speed. Fig.4.8 shows the Matlab
simulink model to calculate the reference value of current using relation of equation 3.16 and
3.17.
-
8/12/2019 Report 4correction
37/90
Flux optimization for indirect vector control of induction motor
30
Fig.4. 6: MATLAB simulink model of flux optimization of indirect vector control of induction motor
Fig.4. 7: Simulink model of Theta and flux calculator
-
8/12/2019 Report 4correction
38/90
Flux optimization for indirect vector control of induction motor
31
Fig.4. 8: Matlab simulink model of reference value of current
Results of above control technique are given below. Fig.4.9 shows the simulated speed
response of rotor. The green line color shows the speed reference (1430 rpm) while the blue
line color shows the actual speed of motor. After 2.5 second optimum flux is applied to get
the maximum efficiency.
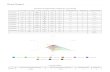
Fig.4.10 shows torque response of motor at 5Nm load condition with conventional
technique PI and Fig.4.11 shows rotor flux applied to the motor with and without flux
optimization system. Fig.4.12 shows the input power consumption of the motor with and
without flux optimization system at 5Nm load torque.
-
8/12/2019 Report 4correction
39/90
Flux optimization for indirect vector control of induction motor
32
Fig.4. 9:Actual and reference speed (1430 rpm)
Fig.4. 10: Actual and reference torque (At 5Nm)
-
8/12/2019 Report 4correction
40/90
Flux optimization for indirect vector control of induction motor
33
Fig.4. 11: Reduction in the rotor flux after flux optimization at 2.5 sec for torque 5 Nm
Fig.4. 12: Reduction in the input power after flux optimization at 2.5 sec for torque 5 Nm
-
8/12/2019 Report 4correction
41/90
Flux optimization for indirect vector control of induction motor
34
4.4 Result
Table.3 shows the result of indirect vector control of induction motor with flux
optimization and without flux optimization at rated speed (1430 rpm) for different load
torque condition.
TABLE. 3: Power at Different Load Condition
Test
Condition
Power Input
Power
Reduction(Input)Without F lux Optimization With F lux Optimization
No load 1275 W 185 W 85 %
3 Nm 2044 W 1498W 26 %
5Nm 2513 W 1895W 25 %
7Nm 2964 W 2619w 11 %
10Nm 3826 W 3733W 2.43
-
8/12/2019 Report 4correction
42/90
Flux optimization for indirect vector control of induction motor
35
Chapter 5
Hardware implementation
The implementation of vector control or any high performance control requires a
complex and fast controller. A microprocessor/microcontroller/ digital signal processor forms
an integral part of such a controller. A fast controller provides a faster sampling rate as
needed, to ensure stable and successful control. PC- based implementation of the vector
control for voltage source inverter-fed induction motor is considered here. So this chaptercovers the description of the system and its operation. This is followed by the design of the
various stages such as driver stage, power supply section, inverter section and sensing circuit.
The controller used in this project is Experimental kit of TMS320F28069 Digital Signal
Controller from Texas Instruments.
-
8/12/2019 Report 4correction
43/90
Flux optimization for indirect vector control of induction motor
36
5.1 . Schematic Block Diagram of the System
The complete induction motor vector control system is basically designed according
to the MATLAB simulation System blocks diagram shown in Fig. 4.1. Due to practical
limitations some modifications are made during the implementation stage. Hardware is
implemented for 0.373kW motor instead of 4 kW motor which is simulated in MATLAB.
Only two phase currents isa and isb are measured instead of all three phase currents. For
balanced condition, three phases are balanced and hence one phase current can be calculated
from the other two phase currents. Same is applicable to the voltage. Fig.5.1 shows the
complete block diagram of the hardware implementation.
IM
IC-HCPL 3120Optocoupler Drivers
Gate signals
Is Is Vs Vs
Controlled
Rectifier
Inverter
CT1
CT2
PT1
PT2
Voltage and Current
Sensing Circuit
LEM HX-
03
230/3V
Step Down
IC-74LS573
A0 A1 A2 A31A 1B 2A 2B 3A 3B
PWM
LC Filter
ADC
IGBT-IRG4PH50UD
Digital Signal Processor
3-
0.5 hp
230 V
230 V
AC
Speedsensor
A4
Flux estimator
r
Id
*
PI
PI
Id
++
--
Iq
*
PI
Vector Rotator
&
- to a,b,c
transformation
a,b,c to -
transformation
&
Vector Rotator
Iq
*r
-+
ds qsUnit Vector
++
V*ds V*qs
PI
PI
r*
Lm
e
Sin(e)
Cos(e)
sl
Fig.5. 1:Block diagram of implemented control algorithm
-
8/12/2019 Report 4correction
44/90
Flux optimization for indirect vector control of induction motor
37
5.2 Design of Three Phase Inverter
The parameters of the induction motor are given below. The two level (3 leg) inverter is used
for controlling the induction motor.
Motor parameter used for hardware:
Rated Power = 373 W,
Rated Voltage = 415 V,
Frequency = 50 Hz,
Number of poles =4,
Stator Resistance = 23.405 ,
Stator Leakage Inductance = 0.0874665 Henry,
Rotor Resistance referred to stator = 38.1155 ,
Rotor Inductance referred to stator = 0.0874665 Henry,
Mutual Inductance = 0.92526 Henry.
The inverter design is based on the voltage rating, current rating and switching
frequency. High switching rates of modern power semiconductors lead to rapid changes in
voltage in relatively short periods of time. Steep-fronted waves with large dV/dt or very fast
rise times lead to voltage overshoots and other power supply problems .These effects can
damage the motors insulation and severely shorten its useful operating life so that The
switching frequency in drives application is typically selected between 2 kHz to 20 kHz. Here
the switching frequency of the inverter is selected as10 kHz.
DC Link voltage, Vdc= 2*VLL=311 V
Due to high DC voltage, high dv/dt voltage spikes are produced which causes the
voltage of the motor winding to exceed the insulation limit which will damage the motor. On
230 volts AC system the voltage spikes are around 1200 - 1500volts.The switch voltage rating
is 1200V and hence a lower DC link voltage of 120V-150V is selected and the step up
transformer with delta/star or delta/delta connected at voltage of 110V/415Vor 110V/230V is
-
8/12/2019 Report 4correction
45/90
Flux optimization for indirect vector control of induction motor
38
used to run the motor (star (415 V) or delta (230 V). The net power capacity of the inverter is
calculated as below
Power rating of motor
Power rating of inverter = ------------------------------------------------------------------
(Efficiency of motor x efficiency of the inverter)*pf
Assuming efficiency of inverter as 85 %, the power rating of the inverter is calculated as
= 370W/(0.6 x0.85*0.8)
= 800 VA
The gate driver selected is IC HCPL- 3120 suitable to drive the IGBT IRG4PH50UD.
The required isolated power supplies for the gate driver ICs is derived from 230 V / 16 V
transformer with ten windings, out of which six are rated for 200mA continuous current rating
two for 500 mA and two are 500mA with 230 V/6 V rating . The six power supplies are used
for the driver of the inverter and the remaining for auxiliary circuits like level shifter, current
sensor in sensing board and buffer IC. The buffer IC used between the DSP controller and thegate driver is 74LS573. The important components of hardware setup for three phase inverter
are shown in Table 4. The summary of operational specifications of the inverter is given in
Table 5.
TABLE. 4: Components used for hardware setup of three phase inverter
Sr. No Component Type
1. Switches IGBT-IRG4PH50UD
2. Gate Driver HCPL3120
3. Buffer 74LS573
4. Regulator LM 7815/7805
5 Rectifier DB107
-
8/12/2019 Report 4correction
46/90
-
8/12/2019 Report 4correction
47/90
Flux optimization for indirect vector control of induction motor
40
HCPL312074LS
573
330 ohm
10 ohm
IN4148
TO GATE
TO EMITTER
GND Vcc
INPUT
FROM
DSP
1
2
3
46
7
5
8 10uF/63v
Fig.5. 3: Gate driver circuit for inverter switches.
To turn ON the IGBT, gate to source voltage should be greater than the threshold
voltage. If the gate to source voltage is less than the threshold voltage, then the IGBT will be
turned off. Generally the threshold voltage is of +5 volts. Gate signals require isolation from
power circuit which is achieved by means of opto-coupler circuit. The gate control signals are
low voltage level signals .The low level PWM signal from DSP is isolated and amplified by
the driver circuit. Six such circuits have been fabricated with individual power supplies for
driving the IGBTs of inverter.
5.4. Design of PCB Layout for Inverter and Gate Driver using
CadSofts Eagle software
The single sided PCB layout of three phase inverter is as shown in Fig 5.4. The PCB is
designed with the help of CadSofts EAGLE software (version 5.6.0) for power supply
section, driver section and inverter section. In driver circuit section, six gate driver ICs are
used to drive six IGBT switches. The driver IC requires +15 volt power supply which is
derived from the isolated transformer with rectifier, filter circuit and voltage regulator
(LM7815) IC. Current handling capacity of the power circuit track is 6 A.
-
8/12/2019 Report 4correction
48/90
Flux optimization for indirect vector control of induction motor
41
Fig.5. 4:PCB layout of inverter section
Fig.5.5 shows the photo of inverter circuit with common heat sink driver circuit, and auxiliary
power supply circuit.
Fig.5. 5: Photograph of hardware of three phase inverter and gate driver with isolated supply
POWER
SUPPLY
BUFFER
74LS573
SWITCHES
CONTROL
CIRCUIT
SWITCHES WITH
COMMON HEAT
SINK
POWER
SUPPLY
BUFFER
74LS573
CONTROL
CIRCUIT
-
8/12/2019 Report 4correction
49/90
Flux optimization for indirect vector control of induction motor
42
The step down transformer has ten isolated secondary winding out of which six
secondary windings of 16 V, 200mA is used for supply of driver circuit. Two 16 V, 500mA
isolated windings of the transformer are used to provide auxiliary supply for current sensing
amplifier circuit. Another two isolated windings of the transformer is giving 6 V, 200mA
AC. One is rectified and given to the regulator which regulates output voltage to 1.5 volts.
The regulator used is LM317. This 1.5 DC voltage is used to provide DC phase shift for the
input signals of the processor. 5 V DC which is used for buffer IC is also generated.
5.5. Design of Voltage and Current Sensing Circuit
The single sided PCB layout of voltage and current sensing circuit is shown in
fig.5.6.Two LEM HX-03 type of current sensors are used to sense the currents of two phases
of the induction motor driven by the inverter. Output of LEM current sensor is in the form of
voltage which is in the range of -4V to 4V for the current range of 0-3 A, Two step-down
transformers are used to sense voltages of the induction motor .Two phase voltages are sensed
by potential transformers. The line to line voltage across the motor terminals is stepped down
to 3 V with the help of transformers of 230V / 3V, 500mA ratings.
The ADC of DSP is unidirectional and can handle only 3.3 V maximum so that all
input sensed signals are adjusted below 3.3V with the help of potentiometer and shifted by
+1.5 V DC. The pot used is of 10 k. Both sensed voltage and current signals after suitable
processing are fed to DSP processor ADC pins. Fig.5.7 shows the photo of current sensor,
voltage sensor and auxiliary power supply fabricated on one board
-
8/12/2019 Report 4correction
50/90
Flux optimization for indirect vector control of induction motor
43
Fig.5. 6: PCB layout of sensing board.
POWER
SUPPLY
CURRENT
SENSOR-
(LEM-03HX) PT-230V/3V
-
8/12/2019 Report 4correction
51/90
Flux optimization for indirect vector control of induction motor
44
Fig.5. 7 : Component view of sensing board
5.6 Laboratory Setup of the Complete System
The laboratory setup with a step up transformer and filter is as shown in Fig.5.8. Setup
consists of 0.37kW inductions motor which is fed by Voltage Source Inverter (VSI). The two
current sensors-LEM HX-03 and two potential transformers are used to sense the currents and
voltages respectively.
Current sensor
(LEM HX-o3P)
Power supply
-
8/12/2019 Report 4correction
52/90
Flux optimization for indirect vector control of induction motor
45
Fig.5. 8 : Laboratory setup
5.7 Description of TMS320F28069
Thecomplete application is processed using the DSP software. The flowchart for the same is
shown in fig 5.9. The three main operations are voltage and current measurements of
induction motor, vector control and the PWM generation. With the help of ADC, we measure
the voltage and current. The flux and actual torque is calculated from the sensed voltage and
current using the voltage model. The implementation of vector control is done as explained in
chapter 3.
STEP-UP
TRANSFORMER
(80V/230V)
MOTOR (0.5HP)
FILTER
CAPACITOR &
INDUCTOR
DSP PROCESSOR
28069
EXPERIMENTALBOARD
SENSING
CIRCUIT
POWER
SUPPLY
DSO
-
8/12/2019 Report 4correction
53/90
Flux optimization for indirect vector control of induction motor
46
Read ADC
channel4 (Output
of speed Encoder )
TransformStationary
2-phase dq into
Rotating refrance
frame
Transform 3 phase
abc into
2-phase dq
Read Sampled
value of Current &
voltage from ADC
channel
Calculate rotor flux
torque and theta
angle
Obtain error in speed
by comparing speed
ref. with measured
speed
Calculate
Reference Torque
by Speed PI
Controller
Calculate Current
Iq*
Obtain Vq*from
Current PI
controller
Calculate Id* from
Reference flux
Obtain Vd*from
Current Pi
controller
Transform Vd* and
Vq* into stationary
reference frame
Transform
stationary reference
frame voltage into
abc frame
Return from ISR
Obtain error in
current by comparing
ref. current withactual current
Obtain error in
current by comparing
ref. current with
actual current
A
ASTART
Fig.5. 9: Flow chart of program for Vector control
The Texas Instrument Experimental kit TMS320F28069 has many features making it suitable
for power electronics applications
-
8/12/2019 Report 4correction
54/90
Flux optimization for indirect vector control of induction motor
47
5.7.1Features of the controller
1. High-Efficiency 32-Bit CPU (TMS320C28x)
2.
80 MHz Clock (12.5-ns Cycle Time)
3. 16 x 16 and 32 x 32 MAC Operations
4. 16 x 16 Dual MAC
5.
Harvard Bus Architecture
6. Atomic Operations
7. Fast Interrupt Response and Processing
8. Unified Memory Programming Model
9. Code-Efficient (in C/C++ and Assembly)
5.7.2 Block diagram of TMS320F28069
It is 32-bit fixed point microcontroller which is used for controlling purpose in industries for
automation, lighting, robotics, power supplies.
Fig.5. 10: Block Diagram of TMS320F28069
The TMS320F28069 also supports many communication protocol making it very suitable for
various industrial applications. The dedicated ePWM (enhanced PWM) blocks make CPU to
work efficiently for control algorithm. The Fig 5.11 shows the image of experimental kit ofTMS320F28069
-
8/12/2019 Report 4correction
55/90
Flux optimization for indirect vector control of induction motor
48
Fig.5. 11: Image of experimental kit of TMS320F28069
5.7.3 General-Purpose Input /Output (GPIO)
The GPIO MUX registers are used to select the operation of shared pins on the 280x
devices. The pins are named by their general purpose I/O name i.e. GPIO0 - GPIO34. These
pins can be individually selected to operate as digital I/O, referred to as GPIO, or connected to
one of up to one of three peripheral I/O signals (via the GPAMUX1, GPAMUX2 and
GPBMUX1 registers). If selected for digital I/O mode, registers are provided to configure the
pin direction (via the GPADIR and GPBDIR registers).
5.7.4Event Manager
The event-manager (EV) modules provide a broad range of functions and features thatare particularly useful in motion control and motor control applications. The EV modules
include general-purpose (GP) timers, full-compare/PWM units, capture units, and quadrature-
encoder pulse (QEP) circuits. The two EV modules, EVA and EVB, are identical peripherals,
intended for multi-axis/motion-control applications EVA and EVB timers, compare units, and
capture units function identically. However, timer/unit names differ for EVA and EVB.
-
8/12/2019 Report 4correction
56/90
Flux optimization for indirect vector control of induction motor
49
5.7.5ADC
The ADC module has 16 channels, configurable as two independent 8-channel
modules to service event managers A and B. It has built in dual sample and hold. It provides
simultaneous sampling and sequential sampling modes. It has fast conversion time up to12.5
MSPS. it has 2X8 channel multiplexed inputs. The start of conversion can be given by
external pin .analog input range is 0 to 3.3 V. The digital value of the input analog voltage is
derived by:
Digital Value =4096*((analog input voltage-ADCLO)/3.3)
The two independent 8-channel modules can be cascaded to form a 16-channel module.
Although there are multiple input channels and two sequencers, here is only one converter in
the ADC module. The two 8-channel modules have the capability to auto sequence a series of
conversions, each module has the choice of selecting any one of the respective eight channels
available through an analog MUX. In the cascaded mode, the auto sequencer functions as a
single 16-channel sequencer. On each sequencer,once the conversion is complete, the selected
channel value is stored in its respective RESULT register.
5.7.6 PWM
An ePWM module represents one complete PWM channel composed of two PWM
outputs: EPWMxA and EPWMxB, ePwm sub-module are as shown in Fig. 4.11. Each ePWM
module supports the following features:
Dedicated 16-bit time-base counter with period and frequency control
Two PWM outputs (EPWMxA and EPWMxB) that can be used in the following
configurations:
Two independent PWM outputs with single-edge operation
Two independent PWM outputs with dual-edge symmetric operation
One independent PWM output with dual-edge asymmetric operation
-
8/12/2019 Report 4correction
57/90
Flux optimization for indirect vector control of induction motor
50
Fig.5. 12: Sub-modules of an ePWM Module
Asynchronous override control of PWM signals through software. Dead-band generation
with independent rising and falling edge delay control.
PWM output signals (EPWMxA and EPWMxB): The PWM output signals are made
available external to the device through the GPIO peripheral described in the system
control and interrupts guide for your device.
ADC start-of-conversion signals (EPWMxSOCA and EPWMxSOCB): Each ePWM
module has two ADC starts of conversion signals. Any ePWM module can trigger a start
of conversion. Which event triggers the start of conversion is configured in the Event-
Trigger sub-module of the ePWM.
5.7.7 Calculating PWM Period and Frequency
The frequency of PWM events is controlled by the time-base period (TBPRD) register and the
mode of the time-base counter. The time-base counter has three modes of operation selected
by the time-base control register (TBCTL):
-
8/12/2019 Report 4correction
58/90
Flux optimization for indirect vector control of induction motor
51
Up-Down-Count Mode: In up-down-count mode, the time-base counter starts from
zero and increments until the period (TBPRD) value is reached. When the period
value is reached, the time-base counter then decrements until it reaches zero. At this
point the counter repeats the pattern and begins to increment.
Up-Count Mode: In this mode, the time-base counter starts from zero and increments
until it reaches the value in the period register (TBPRD). When the period value is
reached, the time-base counter resets to zero and begins to increment once again.
Down-Count Mode: In down-count mode, the time-base counter starts from the period
(TBPRD) value and decrements until it reaches zero. When it reaches zero, the time-
base counter is reset to the period value and it begins to decrement once again.
For the project to generate the PWM pulses updown count mode is selected because
for space vector modulation implementation we need symmetric triangular wave. The
code for Vector control algorithm is written in Texas Instruments Code Composer Studio
4 (CCS-4) compiler which gives the online debugging tools through the emulation.
-
8/12/2019 Report 4correction
59/90
Flux optimization for indirect vector control of induction motor
52
Chapter 6
HARDWARE RESULTS
This chapter covers details of parameter setting for DSP coding, sensing circuit
calibration and the results of various experimentation carried out on fabricated setup for
vector control of induction motor.
6.1 Calculation of TBPRD for ePWM module of TMS320F28069
In order to set the switching frequency of inverter to be 10 kHz, the TBPRDregister should
be set to appropriate constant.
System clock (TBCLK) = 80 MHz (12.5ns)
TPWM = 100s (for fs=10 kHz )
-
8/12/2019 Report 4correction
60/90
Flux optimization for indirect vector control of induction motor
53
To find TBPRDfor symmetric waveform is given by below formula
TPWM = 2* TBPRD* TBCLK
Hence, TBPRD = 4000.The ePWM module is initialized with TBPRD =4000 in symmetrical PWM mode, in order to
get the PWM frequency of 10kHz. The EPWMxA and EPWMxB are set to generate
complimentary pulses for inverter with appropriate dead band. For preliminary testing
purpose six sine-triangular PWM pulses are generated (1A, 1B, 2A, 2B, 3A, 3B) with help of
DSP (TMS320F28069). Fig. 6.1 (a) shows the sine PWM pulse generated from EPWM 1A
and EPWM 1B which is given to one inverter leg of three phase inverter and Fig. 6.1 (b)
shows expanded view of same.
.
a) b)
Fig.6. 1: (a) PWM pulse of 1A& 1B with frequency of 10 KHz and (b) expanded view of pulse
6.2: Testing and Calibration of Current and Voltage Sensing Board
Output of LEM current sensor is in the form of voltage which is in the range of -4V to
4V for the current range of 0-3Amps,The current sensor is calibrated using the potentiometer
(10kohm).The potentiometer is set to give 2.2 Volt peak to peak voltage corresponding to 3A
of current . The voltage sensing circuit is also calibrated by means of multi-turn preset
connected across the 230V/ 3 volts transformer used for voltage sensing. The preset is set to
-
8/12/2019 Report 4correction
61/90
Flux optimization for indirect vector control of induction motor
54
give 2.2 V peak to peak voltage corresponding to 220Vac rms output of inverter. Both
measured current and voltage signals are fed to DSPs ADC input pins after suitable signal
processing. Before feeding, the signal should be limited to a 3V(peak to peak) DC so that
DSP can process that data.Using variable voltage regulator LM317, 1.5V output is generated.
The sensed signals are shifted by 1.5V by connecting them in series and then fed to DSP. The
sensed signals are then shifted using shifting circuit which is shown in following Fig.5.5. This
offset of 1.5 volts is then nullified by subtracting it from ADC measured value in DSP
through coding. To obtain the original sensed signal as per actual values, calibration of
voltage sensing and current sensing by suitable CT ratio and PT ratio calculation is done in
the DSP code.
Initially the current sensor circuit is tested by measuring the current of three phase
induction motor at no load condition which is supplied by 230 volt mains supply directly .
Current sensors output is shown in the following diagrams.
Fig.6. 2: Level shifted waveforms at no load condition of Induction motor a) sensed voltageb)sensedcurrent
The sensing circuit board was tested with induction motor as a load to inverter. The
results are shown in Fig.6.3. The sensed signal shows significant amount of noise due to
switching of inverter.
-
8/12/2019 Report 4correction
62/90
Flux optimization for indirect vector control of induction motor
55
a) b)
Fig.6. 3:(a) Sensed current waveform b ) Sensed voltage waveform
The noise presented in the sensed signals is removed by the discrete low pass filter using
numerical integration technique in DSP. For voltage sensing and current sensing, first order
low pass filter is implemented. The cutoff frequency selected for both the filter is 500Hz.
The Vector control algorithm as explained in section 3.5 and for flux optimization 3.6
of chapter 3 is implemented in Texas Instruments Code Compose S tudio (CCS-4). The space
vector PWM pulses generated and resultant motor terminal voltages are as shown in the Fig
6.4
a)
b)
Fig.6. 4: (a) Space Vector Modulated PWM gate pulses (b) Motors single phase output terminalvoltages after filtering
-
8/12/2019 Report 4correction
63/90
Flux optimization for indirect vector control of induction motor
56
Fig. 6.5 shows the screen shot of CCS-4 indicating the SVM implementation, where
the reference voltage vector position is identified in terms of sector which repetitively moves
from 1 to 6 and repeat.
Fig.6. 5: CCS-4 Screen shot indicating sector selection of space vector modulation
Fig.6. 6:CCS-4 Screen shot indicating torque and flux estimation based on measurement of actualmotor terminal voltages and currents
-
8/12/2019 Report 4correction
64/90
Flux optimization for indirect vector control of induction motor
57
Chapter 7
Conclusion and future scope
Conclusion
DC drives are simpler in control because they independently control flux and torque which is
not the case with induction motor drive. To enable the independent control of flux and torqueas DC machine, the stator current is resolved into two components; one is flux producing
current component and the other is torque producing current component. This is referred as
vector control. Indirect vector control is most effective method, which is used in industry for
controlling of induction motor. Indirect vector control has a good dynamics performance.
In this project work, the rotor field oriented vector control along with flux optimization is
implemented. With flux optimization, we save energy. At no load or at low load condition
iron loss are more compared to the copper loss, so we make both losses equal so that motor
will consume less power compared to without flux optimization. The loss model based
-
8/12/2019 Report 4correction
65/90
Flux optimization for indirect vector control of induction motor
58
approach utilizes the machine model to make copper loss equal to iron loss for any load
condition by flux optimization. The torque ripple is less in this method. The efficiency of the
machine is improved by minimizing the power loss of induction machine drives by flux
optimization which is essential in energy saving point of view in the present scenario
Future Scope
As the complete hardware is ready for an induction motor drive, the work can be extended
to implement following features
1) Study the different methods of flux optimization for vector control and compare the
performance of different flux optimization method like loss model based approach ,search
controller approach etc.
2) We can extend this project for implementation of flux optimization of vector control
using Fuzzy logic approach.
3) Improvement in the efficiency by considering the losses in converter /reducing the
losses in the converter
4) Study the control schemes of sensor-less vector control and to compare the
performances of different speed sensor less control algorithms.
5) Develop robust controllers which would give high performance control even if
subjected to machine parameter variation.
6) Develop algorithms for accurate estimation of stator and rotor resistances for
improvement in flux estimation.
-
8/12/2019 Report 4correction
66/90
Flux optimization for indirect vector control of induction motor
59
References
[1] Chandan Chakraborty and Yoichi Hori, Fast Efficiency Optimization Technique
for the Indirect Vector-Controlled Induction Motor Drives IEEE transactions on
industry applications, vol. 39, no. 4, July/august 2003.
[2]Cao-Minh Ta, Yoichi Hori, Convergence Improvement of Efficiency-
Optimization Control of Induction Motor Drives IEEE transactions on industry
applications, VOL. 37, NO. 6.
[3]M. NasirUddin, and Sang Woo Nam New Online Loss-Minimization-Based
Control of an Induction Motor Drive IEEE transactions on power electronics, Vol.
23, NO. 2.
[4]Cao-Minh Ta, Yoichi Hori, Fast Efficiency Optimization Techniques for the
Indirect Vector-Controlled Induction Motor Drives IEEE transactions on industry
Applications, vol. 37, no. 6.
[5]ZengcaiQu, MikaelaRanta , Marko Hinkkanenand ,JormaLuomi Loss-
Minimizing Flux Level Control of Induction Motor Drives IEEE transactions on
industry applications, vol. 48, no. 3.
[6] Gilberto C.D.souso, B.K.Bose Fuzzy logic based online efficiency optimization
control of an indirect vector controlled of induction motor drive IEEE transactions
on industrial electronics vol.42 .
[7]Cao-Minh Ta, Yoichi Hori Improvementof Efficiency-Optimization Control of
Induction Motor DrivesIEEE transactions on industry applications, vol. 37, no. 6.
[8]S. Grouni1, R. Ibtiouen, M. Kidouche1, O. TouhamiNovel Loss Optimization in
Induction Machines with Optimum Rotor Flux Control International Journal of
Systems Control Vol.1-2010/Iss.4 pp. 163-169.
[9] Mehdi Dhaoui ,LassaadSbita, A New Method for Losses Minimization in IFOC
Induction Motor Drives International Journal of Systems Control (Vol.1-
2010/Iss.2)pp. 93-99.
[10] Anggun Anugrah, Rosli Omar, Marizan Sulaiman,