Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic disturbance observer Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic disturbance observer > Taha Fouda > 29 Nov 2017 Chart 1 By : Taha Fouda Supervised by: Prof. Siegfried Heier Prof. Galal Salem

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Reduction of the rotor blade root bending moment
and increase of the rotational-speed strength of a 5
MW IPC wind turbine based on a stochastic
disturbance observer
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 1
By : Taha Fouda
Supervised by:Prof. Siegfried Heier
Prof. Galal Salem

Introduction
𝑃 =1
2𝜌𝑅2𝑉3
Technology Roadmap Wind Energy, 2013 Edition, IEA, 2013
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 2

• Challenges
1. Higher Loads
2. Reduction in the natural frequencies
• Facing Challenges
Control System
• Observer-Based Disturbance Accommodation Control (DAC)
DAC theory addresses:-
1. The problems of dynamic modelling of uncertain disturbances.
2. Designing feedback/feedforward controllers
Introduction
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 3

DAC
Introduction
Disturbance model System model
Observer
FeedbackFeedforward
Combined model
Modelling
Observation
Control
Wind turbine estimated states
Disturbance estimated states
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 4

• A HAWT model consists of a rotor model, a drive train model, an electrical
generator model and a tower model.
• Nowadays, all described models can be implemented in various analytical
tools such as FAST, SymDyn and DUWECS (Linearization and simulation).
• The aero-elastic simulation tool FAST is used in this study for modelling of
National Renewable Energy Laboratory NREL 5 MW baseline turbine.
• FAST is developed by NREL for onshore & offshore / 3-bladed & 2-bladed wind
turbines
Modelling of wind turbine for controller design
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 5

Linearization
• Trim conditions
𝑉𝑚 = 18 𝑚/𝑠
Region III:
Constant speed=12,1 rpm
Rated power = 5 MW
𝜃𝑡𝑟𝑖𝑚 = 14.92°
Modelling of wind turbine for controller design
𝑥1 1st tower fore-aft bending mode
𝑥2 Variable speed generator
𝑥3 1st flapwise bending-mode of blade 1
𝑥4 1st flapwise bending-mode of blade 2
𝑥5 1st flapwise bending-mode of blade 3
𝑥6 First time derivative of 1st tower fore-aft bending mode
𝑥7 First time derivative of Variable speed generator
𝑥8 First time derivative of 1st flapwise bending-mode of blade 1
𝑥9 First time derivative of 1st flapwise bending-mode of blade 2
𝑥10 First time derivative of 1st flapwise bending-mode of blade 3
• States 𝑥
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 6

Linearized wind turbine model
Modelling of wind turbine for controller design
• 7
𝒚
generator speed
Blade 1 edgewise moment
Blade 2 edgewise moment
Blade 3 edgewise moment
Blade 1 flapwise moment
Blade 1 flapwise moment
Blade 1 flapwise moment
Tower side-to-side moment
Tower fore-aft moment
Tower torsional moment
𝒖
Blade 1 command pitch input
Blade 2 command pitch input
Blade 3 command pitch input
𝒛
Wind Disturbance
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 7
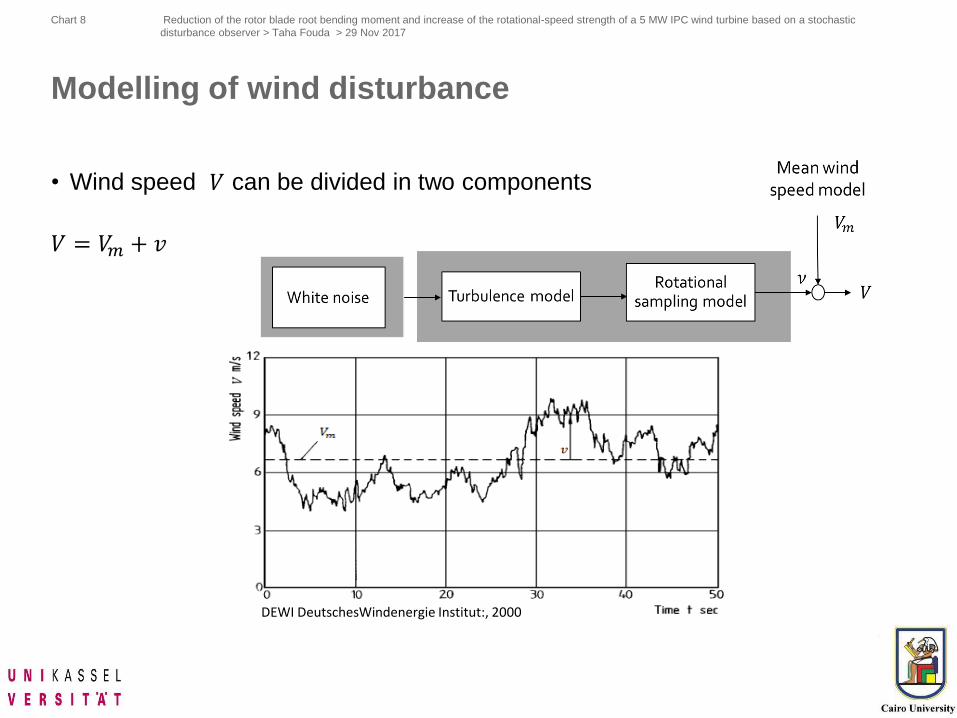
• Wind speed 𝑉 can be divided in two components
𝑉 = 𝑉𝑚 + 𝑣
Modelling of wind disturbance
DEWI DeutschesWindenergie Institut:, 2000
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 8

➢Turbulence
• The high frequency random variations of the flow.
• Stochastic process - Hard to be modelled in deterministic equations -Modell
just the characteristics via a Power Spectral Density (PSD).
• Dryden turbulence model will be used here.
Modelling of wind disturbance
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 9

• Dryden wind Turbulence model
• 𝐹𝑢𝑤 =𝑢 𝑠
𝑟 𝑠= 2𝜎𝑢
2𝑇𝑢 .1
1+𝑠𝑇𝑢
• ሶ𝑥𝐷𝑟𝑦 = മ𝐴𝐷𝑟𝑦𝑥𝐷𝑟𝑦 + മ𝐵𝐷𝑟𝑦𝑢
𝑧 = മ𝐶𝐷𝑟𝑦𝑥𝐷𝑟𝑦
മ𝐴𝐷𝑟𝑦= −𝑉
𝐿𝑢, മ𝐵𝐷𝑟𝑦 = 𝜎 2
𝑉
𝐿𝑢, മ𝐶𝐷𝑟𝑦 = 1
− 𝜎 : standard deviation of the flow variation, Turbulence intensity
- 𝐿𝑢 : Charactristic length ( is measured and modlled by Brockhaus11 )
• Extention for the 3 blades with different uncorelated white noise seeds
Modelling of wind disturbance
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 10

Rotation Sampling al Effect
Modelling of wind disturbance
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 11
• The turbine rotor samples
the eddy periodically with
each rotation until the eddy
passes the rotor.
• PSD shows the peaks at the
rotational frequency 𝑓1𝑏 and
at higher harmonics
(𝑓2𝑏 = 2𝑓1𝑏, 𝑓3𝑏 = 3𝑓1𝑏).
• This effect is represented by
the Inverted notch filter
response.

• Turbulence states are hard to measure
• According to the "internal model principle", the control quality or the potential
for disturbance rejection is increased; the more information there is available
on the character of the disturbance (turbulence).
• The ability of an observer to estimate non-measurable states from a set of
measurements using a model of the plant suggests the idea of extending the
model of the plant by a model of the disturbance.
• The discrete Kalman Filter will be used as an observer.
Observation
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 12

Combined model
Observation
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 13

The discrete Kalman Filter
Observation
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 14
• It is an optimal recursive data
processing algorithm that gives the
optimal estimates of the system
states for a linear system with
additive Gaussian white noise in the
process and the measurements.
• Kalman Filter estimates the states
and gives an error in the estimation
via the error covariance matrix 𝑃.
• It is optimal in the sense that it
minimizes the variance in the
estimated states.
മ𝑃𝑘 = 𝐸 𝑒𝑘 𝑒𝑘𝑇

The Discrete Kalman Filter algorithm
Observation
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 15

The Discrete Kalman Filter Tuning
• Via the determination of മ𝑄𝑣𝑎𝑟 and മ𝑅𝑣𝑎𝑟.
- മ𝑄𝑣𝑎𝑟: Process noise covariance matrix മ𝑄𝑣𝑎𝑟 = 𝐸 𝑤𝑘𝑤𝑖𝑇
- മ𝑅𝑣𝑎𝑟: Measurement noise covariance matrix മ𝑅𝑣𝑎𝑟 = 𝐸 𝑣𝑘𝑣𝑖𝑇
• Often just the main diagonal elements മ𝑄𝑣𝑎𝑟 and മ𝑅𝑣𝑎𝑟 are engaged.
• മ𝑅𝑣𝑎𝑟 is determined via sensors datasheet.
• മ𝑄𝑣𝑎𝑟 is determined via the average model uncertainties over the azimuth
angel.
Observation
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 16

Setting up design criteria
1. The standard deviation of the rotational speed
2. The standard deviation of the flap moment
Controller
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 17

Feedback Controller
• The Linear Quadratic Regulator (LQR) have been used as a full state feedback
controller for tuning the wind turbine plant.
• A linear time - invariant system is optimal if the following quadratic cost
function is minimized
𝐽 = 0∞(𝑥𝑇മ𝑄𝐿𝑄𝑅 𝑥 + 𝑢𝑇മ𝑅𝐿𝑄𝑅 𝑢)𝑑𝑡
It is minimized for the control law
𝑢 = −മ𝐾𝐿𝑄𝑅 𝑥
മ𝐾𝐿𝑄𝑅 = 𝑓(മ𝑄𝐿𝑄𝑅 , മ𝑅𝐿𝑄𝑅 )
Controller
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 18

Feedback Controller
• Design Parameters മ𝑄𝐿𝑄𝑅 & മ𝑅𝐿𝑄𝑅
• Rule of thump (Bryson‘s Rule)
𝑄𝑢 =1
𝑀𝑎𝑥(𝑥𝑢2)
𝑅 =1
𝑀𝑎𝑥(𝑢2)
𝑀𝑎𝑥 𝑥𝑢 simulation without no input
Intially 𝑅 𝐼 , then tuned by finding the maximum input in the simulation
Observation
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 19

Feedforward Controller
• മ𝐾∗ is the observer gain
മ𝐾∗ = മ𝐾𝑥 മ𝐾𝑥𝑑 𝑇
• The Controller gain
മ𝑅∗ = മ𝐾𝐿𝑄𝑅 മ𝑁
Controller
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 20

Feedforward Controller
ሶ𝑥
ሶ𝑥𝑑ሶ𝑒𝑥ሶ𝑒𝑥𝑑
=
മ𝐴 − മ𝐵മ𝐾𝐿𝑄𝑅000
മ𝐸 മ𝐶𝑑 − മ𝐵മ𝑁
മ𝐴𝑑00
മ𝐵മ𝐾𝐿𝑄𝑅0
മ𝐴 − മ𝐾𝑥മ𝐶
−മ𝐾𝑥𝑑മ𝐶
മ𝐵മ𝑁
0മ𝐸മ𝐶𝑑 − മ𝐾𝑥മ𝐹മ𝐶𝑑മ𝐴𝑑 − മ𝐾𝑥𝑑മ𝐹മ𝐶𝑑
𝑥𝑥𝑑𝑒𝑥𝑒𝑥𝑑
+
മ𝐵
000
𝑢𝑐𝑜𝑚
മ𝐸മ𝐶𝑑 − മ𝐵മ𝑁 = 0
മ𝑁 = മ𝐵−1മ𝐸മ𝐶𝑑
Controller
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 21

Stability
• Unstable system because of numerical problem with FAST caused by the
generator azimuth state after doing Multi-Blade Coordinate transformation(MBC).
• LQR tunes the wind turbine and the system becomes stable.
Results
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 22
MBCBlades
Tower
Generator

• Validation of the Linear Model
The linear system response is approximatly matched with the nonlinear
response.
• Validation of the Discrete Kalman Filter with the linear model
The Discrete Kalman Filter shows a good and fast estimation for the wind turbine
states and the disturbance states.
Results
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 23

The Controller Performance
Results
Uncontrolled
turbine
Feedforward
control
Feedforward/Feedbak
control
Generator speed 34,45 rpm 15,62 rpm 15,62 rpm
blade Flapwise
moment 6272,9 KNm 5442,65 KNm 240,63 KNm
Tower fore-aft
moment2503,39 KNm 647,23 KNm 633,66 KNm
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 24

Standard deviation of the rotational speed Comparison criteria
Comparative studies with a given "classical load
controller"
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 25
Modern Control Classical control
15 m/s 0,53 0,55
25 m/s 0,35 0,97

1. Observer based DAC is designed and implemented to reduce the rotor blade
root bending moment and increase the rotational-speed strength of a 5 MW
IPC wind turbine.
2. The ability of an observer to estimate non-measurable states from a set of
measurements using a model of the plant suggests the idea of extending the
model of the plant by a model of the disturbance.
3. The results show that the Discrete Kalman Filter has a good and fast
estimation for the linear systems with Gaussian noise.
4. The results show that the modern controller gives a better result than the
classical controller.
Conclousion
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 26

Thank you
???
Reduction of the rotor blade root bending moment and increase of the rotational-speed strength of a 5 MW IPC wind turbine based on a stochastic
disturbance observer > Taha Fouda > 29 Nov 2017
Chart 27
Related Documents











