AD-A252 552 THE ONR WORKSHOP ON DISCRETE STRUCTURES IN CLASSIFICATION 05 MAY- 06 MAY 1992 RAMADA RENAISSANCE HOTEL WASHINGTON-DULLES PROCEEDINGS DTIC ELECTE _______JUL 0 119921 This document has been -approved 8 AD for public rclease and sale; its distribution is unlimited. Organized by: F.R. McMorris, University of Louisville Marc J. Lipman, Office of Naval Research GRANT: N00014-92-J-1574 R&T: 4111066---01 92-17140 92 6 " IIINhImIIIII

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

AD-A252 552
THE ONR WORKSHOP ONDISCRETE STRUCTURES IN CLASSIFICATION
05 MAY- 06 MAY 1992
RAMADA RENAISSANCE HOTELWASHINGTON-DULLES
PROCEEDINGS
DTICELECTE
_______JUL 0 119921This document has been -approved 8 ADfor public rclease and sale; itsdistribution is unlimited.
Organized by: F.R. McMorris, University of LouisvilleMarc J. Lipman, Office of Naval Research
GRANT: N00014-92-J-1574R&T: 4111066---01
92-1714092 6 " IIINhImIIIII

DISCLAIMER NOTICE
THIS DOCUMENT IS BEST
QUALITY AVAILABLE. THE COPY
FURNISHED TO DTIC CONTAINED
A SIGNIFICANT NUMBER OF
PAGES WHICH DO NOT
REPRODUCE LEGIBLY.

PREAMBLE
The objective of this workshop was to determine the state-of-the-art in Discrete Structured Classification, and chart new directions ofresearch relevant to Navy needs. Thus it had two goals. The first wasfor the Principal Investigators currently funded by ONR in this core areaof Discrete Mathematics to inform each other and their Scientific Officerof their current research activities. The second was for the PIs and Navyscientists to meet each other and exchange problems and ideas with thehope of developing significant research partnerships.
The first goal was grandly achieved by direct PI presentations.Progress on the second was made through the problem session androundtable discussions.
Accesion For
NTIS CRA&IDTI, TABUi,.:inounced
Justfiica t iun .......... .......
By ...... .............. ................
Dist ibutior I
Aval c:,..'Di,;t S ,I-ta
Statement A per telecon Marc LipmanONR/Code 1111Arlington, VA 22217-5000
NWW 6/30/92

%. . p
e P, .p :. . F.0
8".. p: . ...
.0
* * S
*..SSSSS * *S 5 .. * ** 5 5* :.*
s..::..:'.: *S
***%**.S*.2. 0.. t* h
4 MS

ATTENDEES
Dr. W.O. AlltopCode 3807Applied Mathematics GroupNaval Air Weapons CenterChina Lake, CA 93555-6001
Dr. Gary ChartrandDepartment of Mathematics and StatisticsWestern Michigan UniversityKalamazoo, MI 49008
* Dr. Donald W. DearholtDepartment of Computer ScienceMississippi State UniversityMississippi State, MS 39762
Dr. Pierre HansenGERAD and lcole des Hautes 6tudes CommercialesDepartement des M~thodes Quantitatives et Systames d'Information5255 avenue DecellesMontr6al, Quebec H3T IV6Canada
Dr. M.F. JanowitzDepartment of Mathematics and StatisticsUniversity of MassachusettsAmherst, MA 01003

Dr. Brigitte JaumardGERAD and lcole Polytechnique de MontrdalDdpartement de Math~matiques Appliqu6esSuccursale A, Case Postale 6079Montr6al, Quebec H3C 3A7Canada
Dr. Marc J. LipmanCode 1111Office of Naval Research800 N. Quincy St.Arlington, VA 22217
Dr. F.R. McMorrisDepartment of MathematicsUniversity of LouisvilleLouisville, KY 40292
Dr. K.B. ReidDepartment of MathematicsCalifornia State UniversitySan Marcos, CA 92069
Dr. Fred S. RobertsDepartment of MathematicsRutgers UniversityNew Brunswick, NJ 08903

. Dr. Uriel G. RothblumRUTCORRutgers UniversityNew Brunswick, NJ 08903
Dr. Ralph WachterCode 1133Office of Naval Research800 N. Quincy St.Arlington, VA 22217

ONR WORKSHOP ON
DISCRETE STRUCTURED CLASSIFICATION
Tuesday 5 May
0900 MARC LIPMAN
0930 BUCK McMORRIS
1030 PIERRE HANSENBRIGITTE JAUMARD
1200 Lunch
1300 BROOKS REID
1400 DON DEARHOLT
1500 Break
1515 Problem session - MARC LIPMAN
1600 Roundtable
1800 Conference Dinner
Wednesday 6 May
0900 MARC LIPMAN
0930 GARY CHARTRAND
1030 break
1100 URIEL ROTHBLUM
1200 Lunch
1300 MEL JANOWITZ
1400 Roundtable
1500 Wrap

Sm
THE FOLLOWING PAGES CONSIST OF ABSTRACTS ANDCOPIES OF THE TRANSPARENCIES USED FOR THEPRESENTATIONS.

- :3 EC'.z :3 4- 4-
I-04:~ 0 2~00oE
0
U).
cn 0) C;) A2
cCO (DcjE 0)
00 4-
.0
0 0 0C
CC ~ 0 C Uc
WI--0 ~ Co c.)
0) ~ c m _
CD "
E~ co
C ~-C
UU E) E
mi 0 . C,

C)
ucw amhA.LU
zz
LU-
0z =zi LIm W
=1of 4 00*Cf) lL LA .
=L=44 71.L
CO ~c O Oui cc CL p
LLCM
zurL(
I. c

WI'. LU 0
LUJ
Im- 2z 0 uCO- z
1mm LUm
CO) -' 0 LU 0CO) _U <L
CM) 2Iz z o- LU Z
CIDCm LLO
2Lm C0 Lcm) ZmLLWZ LUJ
LAi LLU ocA
~~LUJ. O TVC m C O
0 ~ L

U.l 0
Z C J
-a =4cLax
ci - . -
zz I>M o.
Z Z
u
.C CL,
mj cc
z C., I
4 CL
%. C.) I

LU_U LU
C . CO) C.
0... z0A LU
CM) CO)= c 0 0o I.- ui
Z cc
>0z0 LUg
cn LU 0 ZU aLC~
2 CM
LLJJ
I.. LUL. LU
0U 0
=e L lU
z ca =
2C o L L
0 LU EA
CO L' CUD LU ,O

L6 0N4 0
N4 Q
LU uoiJJm
X ~LL.
z =m
lw lI- fU.
LL=LI-.
CD-
cncZ0 N 0um
LA 0zr4-zN
-ooFi- w wAI
wE CO) CO) 2
>00
-- LI. 0 0)
LLi
z CD ~~I..I OZ4 2
Zc.Z
CO) CA~

11.18
166 0 0
04'
C.~LLILU
zzjx LU
LI.IJ
mmi
m a0
ci
.0 - f

C
ww
RA c4
.-LUJ
UE L
LALULIUwCO)i
- LL.CM i z
00
LU

*Iie
C.CO
00z

NC
c-I
0 I-C,,Ccm
U.'JwME
- 0I- CO)
xmL.
ui0
'V
4AI-O

L6U
zi 0
zom
C.2
00

um
cn
C
~ui
CD,LLM x
* IU
CODf
u.1
4c
.01

C1
4n ,-
Im I doo% COL6U L IM
NeJ
LLWLLJ
lLLJ IN=
CM 0=
~~z
Lai 0 0 0 LPon~ ~ ~ -L nI.U O
ZZ TEO) mi= C- AIR 4c 2iL
LLJ~ a L-C)zzL
= Z 0
CL cz

C
LU wUL6 Q
N. CO) 2L
CO) WML
CO)L 2 L
c.7 2ME
0 20LUU
LaI LU .1WCO Am miC.
0 0j 0

CD41MW LL1
MmM
- OLL
ULJ Z'nzIi ciu
>M CO) uJ-Um w~jz CO)CO) :
Ciai 0UJE
10 -cnu
* of

LUI
U 0wC
o -
ILc cc:~
LU E-9Z

Zc
w
Cf)Ul)
U -
wCl)w V
Z;TO
g uZu -
* * *4

An axiomatic approach to the aggregationof trees and other discrete structures
F.R. McMorrisDepartment of Mathematics
University of Louisville
Suppose several classifications (usually structured as trees) have beenconstructed for the same set of objects. How can we (why should we) forma "consensus" classification that captures the common agreement of theoriginal classifications? During the past twenty years many methods havebeen developed relevant to the comparison and consensus of classifications.One approach based on the central ideas of Social Choice Theory pioneeredby K. Arrow, has been extended to produce a general axiomatic model toaddress the above question. This talk will present an overview of thisapproach and indicate some recent results.

442 7
c~. c4J~tCOO

** vC"'... - -6
~4AIwo
ectk C7.0O ..v 4
CL CY)
@3. ~~QAA4 O~ ~4P7cA~si Z?

S TS. T91
vz..V A ,

W SAV2 4ooL Aatoa A
(vt

Q@j)
77
-- T
0P

4
P2~P3
P4
Pi
Figure 2.1 aWaveform Segments
PZ (root)
P1 P2
P2 P4
P2 P3
Figure 2.1 bThe Relational Tree
Erich and Foith enumerate several properties of thnse trees [1]. For our work, the
most Interesting is that RT's partition the set of one-dimensional functions into
.equivalence classes. The partitions may be viewed as clusters In a pattern feature

_ . _ _LOLt9::1.
C:
c:C00
UQ~qrn.0;11

gtwfr~ein
Q2 go a~n~
co& cr
Dge le
~kt 6&?411
LQ' P:ZA..)#)-S3O

'V
cVo2 4
Ti-9, AtaAe s a'Tr cm Cc__
T Aoow O;C4 Aovwz a070v

zzP&~as At544 p D p7
xkdA4
04U
Geo _c
j~f CPI 4am 2)L 4~

AeCa~ Y.4~A t4a~~ 4
oz%- Z6k1.t.0 F a'- .,a 4." CA oo, nS
76 ~~ c/az a& ioa2
~e
C~-Al)0
dL4j 4,e eA

A4f11a
ct s *>
27A4~ 4 '~9
IV14"
AOLOVL

IrI]Rime
CA7

A/ Ato~nwr( C$Z4 qL 0 ,,a
C~'r T
U 7~o-;464PPnAa04T/ ~2Z-&
,Oz C4Ao&.
morn 4gax.

T: T
TJ
To riNotiZ -J'
d, )

Alp c
4() (A o
Pf~~?~ 424ft~w~

p T.
Te ~ / 0 ~ 7 a4r cx4z e
'tISiC CPTYxi
ID5~ CCP0)

~ ~AeAc Ad% 2.~~C C ct00)
A
L~ Go" y
* CC/n
A~4\ode AA.7
Sjw- ar.v js/

4-2
9, zo
PAOlr

C *x
Th.
0o2
C7?) Oro)

140.
-a (Roe4j~6
Sv

64t~ES77vo,l of D .~?u ?z
4~OZO_
& A"
z,a/
744c A4~n
P;,4LA

-~ ~~~~f 71.4w Js-,404 a
7/q
f~CP)CJYL0I6$t
9 'AO
4.0CL CJ%06

C2) Dm44 t 1,09
-? 0 CA,* fte fr cqmsg)
f-3)

K.B.ReiAC&1Ac6rria State Oniv. I san% Marcds
t\ 9 ~r61~g rreoi4 f
*in s

~Ittcid SOPHWSTICNTI-h1
b CSINSVIN WIWOYOkITY
V/OTINGi W1TH PM NGC29bA

H~ere~ :d n oArun6 er #fV voe r-
eacVN o4 er linearly7 ora&eri
4 he -aLern-atI*
MM-1~l r~jl usedk 49' eactl
pairwist comrrisor% of :W

* Faculty salaries
Y4ew flyiSj4 Uew Music al
New 4 Ic- b6d5
Vl V V 4 _
a a I a. at Ia a at g,a. '- a
a, a. 3: 4 a

TH E OREPM
Every cw;ir+ec1T~lr arises
ma orrcr 41raferncc ~r
ze DkM-wnk,. m vonrp.

A~~~~~~~~~0 arvrvv*i~a ve**o1o coin4t

ccam~2
A-l -. i.37
l 'Rap - "
(. ,lb , ,Ii

3, 13, 'S

f-I
ar- r- r- 0. m0
so @4 re e,4~
a a -a nA-~~r -% 0-- - v *~f iifnf

00C,4 00
.0000 qr 8
0 00 " .0
0000 % e 00
00 44~-
- r- r-
CqN 00W cW
~0O 00' Go % en -
00q00 0O ' 000 Dr- -I
1. 00 0 n 0 4
00 C- r--a r- r 0% - 0v ON rN
C7 O n NI0 -0
m r--~-q 4 0 0 %C
< z 00 r-- -00IO00 rr-W1 W1

dII
I VA 4L
'bip 44 31iceyve ciecon

The i\-( vo~es 'in V
,&ttte vcAkr focesS catenaJ 4v ni ar
tn-T 44 4c-m
c~ec,~ic~1~'T~AL. 4we c * cs otre e &IT.
ThtO-M A. -T6.aowzw&4ij x~
a &jwvtna &U dirfb o( T.
X% e 4eI f e.4moma SpecWia ~r
a 16 akIF 61t
60 6Z

ydi xeT 5ayxy- 0a4IPC SA=(ZAF&h- -,X
I5A -SM~ suty

(a -- a * .

**~~ -kr %*h *. ~ I ~ I *
f -
ISincere ~r4~rAy va4 ing 4~a~eAJa
£Z1~41I~S
I
- -.... - - - - --. ~-,. --.. ------.--.-. .- -- ------------. --- ~ -. - ..- - -
.. ~ ~' ~

O1(\~~ IN~yEtve's
I~~~~ levelcj av.- &i;lo at verrVu '~ t
#~v -isbJ ABvmt~alkwiAk ZWk (lejve aO)WJ~-~n
Aie2v ei% d j& &IO

II
0 0 = 0. o
Oa S1

*~ PRoO&ITIotI:
so\p-Jcld eAt-i &s.ir Then
* 6T it~ a y=uws & .;
-Ifon4l 4 m ou a

The S tpl en s w
wGiven 6 rnajr41 Outnmrt Toiu4'am
~ ~4* sopiAizAe Jecu irn.
E52.451(
I'
4 1 '24'1'
2* 41 1

Le T-~
to rv v e r a:.- +''++++
= W* o~,sie~.c e~a
; + .- 11-'
4 - S ..1....
t V

VT Yle~ ' epsbe Sop' i-1V;c4ec
Tw~k
W u&h fe6 TJii
* ~ atwri.: US4C

*TIWOMi (bak. 19%)M61a'n a -i a vSI6 c"cjj
ii e~~4 4 s
isd

1) T 4 I i o is 4t iECi"M XiyIV4o.456
X IS Wbt. S6f WsicA- &eC.
Mowev~r 4Enam~ PiVaIsu WM4
OSub~ynvl e IV) 4 ~wn. .eAA To' swlvl
C, Arise4' ft*ewH1 *
4' Cl
all" ~~ ~C ,s ~ s oo
IL~c, is the ile tc.

~cuSt T 4 r* h bes 4 uM e
Problem.% For w ich awaaiwwM& is
&hereafa &3 nJa ca &Ini~ -an
SIceve &%d +%e 64~4AWsionb T

I2KP~Q'I Majcbrity Tournamarvs:
SIncara~ sekt ba
VrAM,3 clfciiofts uv~catr
Ornend rrlrnt rrceure
I&RtThek A~nL Letw~een
kvr 79oim drz8 ionsv a
so lsi&cataA Majority vot-Irl
toa&t. A r L Mai 31 Cg'iql)z2
Oki EtX GRdRPV.S
REIXUlhb I2Y
blSvM~c&L, PLUALITI ES
~T.n TEE~S

*, 40
purple. werices ave .. IeIOCMI
T6 a t N trAxse IC
isabr 141weVA
J G Cr'0xkmk'rii PurIL ~ics ar ce.~da olivs
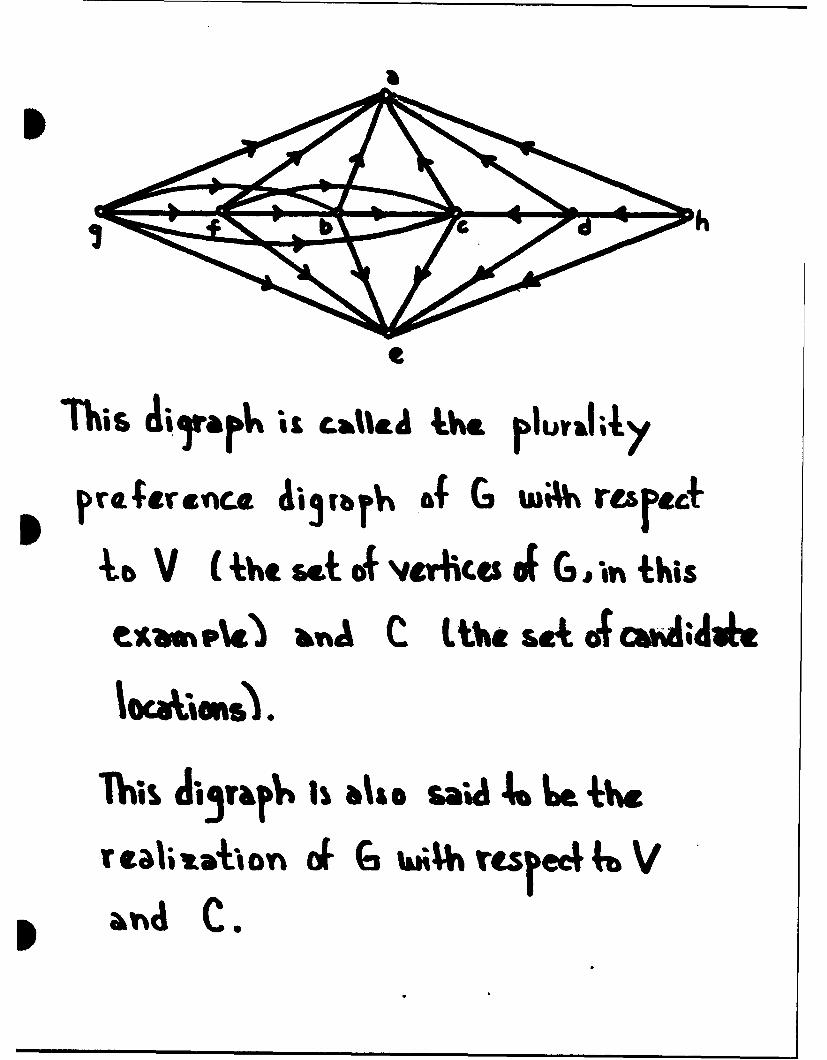
preference cailrbrv% ff G w)& reA Fte-4to V (4heset ofvev~ce at G, -n this
emam~~ L%)uyAtthe &eA 0cm wI;M
llns)n*
ThisAt3 av is ibis aSai& 4 At 4
Irealiabio" ek G "uibrh s 6IwA
adC.

Lat 6 be~ a csrnecA I ra rh% IB
orAer ni. Lua Yi ang C cerie Aves
(niot nelw cAisjeit&' S'ACdS of
vedi!ces of 6. IV Iv aId CI
Th. rah %an a[ G wit esyfeel -6 V
~~IC is4 i~vMrke &A
u. hat(a .6 is ah rc 1f4
1I x E ahd d (x.4) A(x,,b)I
II

S U??obg thA4 wec areaie an
asyrnmeric cAi 5rarh D e 5ev
I h
* "-~ 4c)
S *6

3
I 2
F
0.

A /
V.'
$44
-4
41kt 4'2

Let b a of ~~no&w wia*arcs xvA we%! vauw dA A .fe A.0
D is (nn#tmareaau4e,,iwiar
*D i's C %nt ra hr
n = ~v% t+22r
WOO
3AW-1 1Lsb
f b-.00"Oirab'

\A~hcIoi&tentd 3vaW6 are raabizlte
by ThEESI
Theoram. Ifn oivti lraf bo is
hentb is transitive.
St-vaeTh e Ilri~ifAa I Jbho order 8'AweI's mit (a. n.1%- ua ba We
~~lir1e

Tkwain, cordmb1 Iyu TR'bog
VOW~m g.J 0
-.- j ... 4 ;4
m~ Qv
rV~ ~ J#~4 q~ k

1t~EORH.Let 0 he ah oritnteA 3rar
04 ordr 4's
bi'1s (bi . .T@O~lALI.b
D istas Ia avJ D
CorI.ri hoihlueA uladr3

RtMARK:
is trakh*16ve-Icklsf Zm fA of 1gIIt 3
ROflT "n'.~U ryTREE u Vr511

V
.. , ~,,
.... : - . :.i - ~ -. -
--.--------. ~-----,---. C
/ .4.
-1
.9. ,

Let t. 6e a TI,, irrr,
arl let c 6e a %4e in
G
bi* etJ;&(T),. T-tm $A- 1 ) cm.s J1s tkrcts With.i d;ibj --rdd. ,hen the
trmAiv. n-'oorn is
Iby T

t. ni even
01
. .. .~ ._._. . . .
444
IN~

1,CEVITkMJITY IWi G&A014S
I..

C ME CO IWIA3
MEDIAN (O*.REI 1962)

ec9*) orwbxA CV
vecV(T)
rian J' T Y.; A~x tEAiu 4 ~aI ll~E
cgr&mic1 jlT = i x;0 6w Cx) I wtorAU iiev(T) I

FUDLA M4WTAL RE uur VcT TEOR7s
~Abraick -we~i4h cat4oj 4ta4~CI&s4 di a ;6ivIC veI4A
Or Iwo aaiace4 ve4tces.
Theofanr 2. C(7civiKs, m68) Tht mne4;an
is4,~ Cw~ am e ay~y. 4wam

FaAlarmidrICxr
.7-aiva of_ _ _ _
S iftrees A A17jR/Ham

F.iy- ccw&vaitLMyr~)I
su-TV,4 c.vwc4*A AArKLj C ~h
h~
03~:' *'RA
, aM7

ro"Gacoc.Au cs siir
* Wiilot% o cowwfovalrkc
Th~oem !. The %m-cerrlr o'i T cmsowi 1 ove
vetv or~ two aA4j&ctw* VcA"Ces
Them 41. The %ammeAban ol Tmu 4iverkce soi - bin T,
'Mrem S. T~- -meAi-&n of T is containe4
cam r0Frofer.)

hot xe(6 T md l -cfr -vtt3 rb0!>o,
,~: tE (T),1 3~~ i-o mb o n *aIt
- 'pv

a* -in IrCT)AkVw
t <.- cutex TxAi
kwier Cer To
fxK.4Atli $W-66"4
&wea

L~t4L
~ th {~ri-s ofva4 *ccs o4 a tree 1
EG) = max&A.o, j A . s
6~ ~ v r~o.O mem~r ab
otOfW 4c o~f T-.
9I-awfw%4W, ce4o A crdoiy - Cho

.-r 'oV ayj , . ri 4,,, " ir'i'er
I et ~~~iA
kw-Lev
ii (~ie~~)IIIv I I II I 1 k A t
Tirm .
a~~
'~- _____

Ip
q7 '78 1 -77 110 166
VI49 & ~ 34-7 to"66 3q 21 39 Z3 52 h17
11 0 I 21 303 .1 I
II3 & I1 10 I 21 C.
0 1 3 3 & 16
0 01 3 3 abe
ExMAmptc vt. TO P. 6ATER (A

Obsarvv. 44-A llvca
So.
Thus, 4A k VUlus JA T is the
%- w~a J , her jgis %e
%li t-nllI T

.~~~ lit 6 r4e.(e. Tmsk

6LG U. EciGs&). FlelrwI ea!
Cal;ij=Ia *yI ahx w m z r Vxo L)bv

Ab c C f 9 CCT;&)I 6 77 8 62 z 10 tOt 13 I11 Is Is 6
3 Is 15 15 18 It 21 21 b.c4 7-0 19 zZ 23 27 C
3 " 13 25 29 lo 33 C
35 36 7." a 33 43q c.7 5 34 a% 13 13t3s 4 cJ41
b S 35 34 43 42 51 4# 4'7 41 32 57 47% a16 S1 41 40 Sl so 61
ISIS 47 43 43 54 s4 o cIA
2.4 A 6fi q I11 "71 loo Sr2S 10S JJ -TI IS n 181. S7UP IS 12 % 73 27 75 1o4 SS C27 114 SS -TS Iq 74 16S 11 f2S lb q5 16 51 75 8lf 183
2 1"1 W6 77 T 2 51Iloci S10 lt S-1 U 973 77 1810 16f31ji ~ 5l7 1 7 110 .10

I. ar skII C (T 10 cwr~i ait
VU1tOt2 aa AAV-W
2. 13 C Cr;4.. aic. -cL4ie* JTo

LUT T=LVE) ?A TRE,/ VIZ
bEE. Icor xEN an~d ric--epa-iye Ajvef
t.a I ekr1 BxI U evo 6 4'e L4- (i
16 Y .* kk e... IL -a -1ev, cA 4.kw
c4 NeA ces 'In a largesl- confane 4
.4

T~ h e-. 6all 6wA% we;5V4 ee A$ I d To
Ati - .AW (qT; t comuI~d at -0l verke
* c*~ T o4 rnriwWnvw% 4tAW~ bwwAuiw e;1 4 .
~~pIMtn
-%e s
__ a C..e fjVL~tA
Ir i

W~ LTrr)WTjWTg) (Umdx
(i), W t f , w =w rutu x
* TIAOM. rul r& T.Wtroil
trsi~ls of a stlaW6or
&rIS&

. T.
rIr;. We aS' JT
no - 1 x _ 'A l%
6vjt 0) 33 3i. 2.1 36 31I S
1I( 432 1 9 21 16 31 10
___ 21 7 21 30 8RIb A 8 1 7 (61 7 721_ _
63 l -s -)234 G
Lw,4-111, I 1"2 3 L4. 2. b

4k~ I~Mcie54 "-Aa~ IT=
Mal~o OLTr).
144 VmT; =Ger:4A)f4r 64d<ritlSy
owtv4w~waiT.

&O A XMr C- 4RN VVI") a GWeaht C) ,
SOVe center verwc'
CA(T) PCT tCCO, ;WT,
%W0 V... ?a~u cycl *t
-0/2 17a

lar l 4t i~h IWO' ~ol oftiw C3#vs
j~j, Urd exnah i G wilk
p in 4W) a EC 0))IA IA i'i
m&K4m Aorwi c amr Em& ajRiAIiq
b1 4IwI W.4e s b wi r~ V, b4c(

1~ o cX~.or &y C~nt wns sma
of\sam valuG With Ai Lb)2ri b) or Ir(bY-".I s£ok
P(b) tC(6)

K.ai R ac Ceatro;s 6. center inb Aeesf* I1&TWORKS 21 CLI'q) 11.17,
*Plura1~4y .w4cKenc.. clIrm reahza4
by 4w'.., T.: mc*4avy mv4i 4sat.e+
*Plor-A;4y rr 4reON"a 4; tha reallejby truers M Onv r.ttmaIn nwumvseV8A. 'o a "tar ;fn b; 5ftA. M tbcmaji csOM
Am l PrI "~a %V .caAwk vet4 es in a"to mpari. Grhs &A Cmim-Iw~ (ida
f (wiWniW.k "nvlar) RcA sn al 1 1 lTANly prftuc baWM an clbIst in? 7SWD

ICLUSTER ANALYSIS ALGORITHMS
Pierre HansenGERAD and Ecole des Hautes Etudes Commerciales
D6partement des Mthodes Quantitatives et Syst~mes d'Information5255 avenue Decelles
Montreal, Canada H3T 1V6
Brigitte JaumardGERAD and Ecole Polytechnique de Montreal
D(partement de Math~matiques Appliqu(esSuccursale A, Case Postale 6079
Montr6al, Canada H3C 3A7
Cluster analysis addresses the following very general problem: given a set of entities.find subsets of it, called clusters, which are homogeneous. i.e., such that entities withinthe same cluster resemble one another, and/or well separated. i.e.. such that entities indifferent clusters differ one from the other.
From the late 60's, Mathematical Programming has been applied to cluster analysis.This allowed to:
(i) formulate precisely many problems of cluster analysis as mathematical programs:i.e., optimization problems with an explicit objective function and constraints:
(ii) study the computational complexity of these problems;
(iii) obtain new polynomial algorithms for easy problems, with a low. and sometimeslowest possible, complexity by careful study of each of their steps and of the datastructures necessary to their implementation;
(iv) obtain new and practically efficient algorithms for NP-hard problems;
(v) derive theoretical properties of existing or new algorithms;
(vi) make new clustering methods available to researchers in various fields in the formof computer packages.
)I

Our work in the last few years and planned for follows and extends such lines. We exploretwo avenues of research. On one hand, we define several new problems of cluster analysisin the areas of divisive hierarchical clustering, partitioning, constrained partitioning andclustering with asymmetric dissimilarities. Each time, complexity issues are or will beexplored and new exact algorithms designed (as well as heuristics in the cases where exactsolution is too time-consuming). The main tools used will be graph theory, combinatorialoptimization (mainly nonlinear 0-1 programming) as well as, for the first time in clusteranalysis, exact methods of global optimization.
On the other hand, we complement the study of algorithms by analysis of the stepspreceding and following their use: ways to construct dissimilarity indices, automatedmethods to select "best" partitions among efficient ones, derivation of robustness andsensitivity concepts for clusters and partitions, new and more informative ways to rep-resent partitions and hierarchies. This work will be done in parallel with the analysis ofseveral data sets for real world problems.
The first part of the presentation will review steps of a cluster analysis study and il-lustrate the mathematical programming approach. Bicriterion cluster analysis with thesplit and diameter criteria will be used for this purpose. The second part will reviewrecent work on average linkage divisive hierarchical clustering, maximum split clusteringwith connectivity constraints, the Weber problem on the sphere and using espaliers torepresent results.
2

PARTIT(ONIN6 -PROBLEIISAN6A L6 OR TH~ MS M
CLUSTER ANALYSISi rto cHNN turco. , i
umivE~ttry 6 RA b Js reetv
06 4*4W M. 4I 1*, 4 4 kf PA 444
40
CLUSTV&S (Oft. CL&S) SNVULP Sc'*Nwi~ Irpi

GLUSTCA~ A NA &Y SI S 0 DCP&Jirtsvsreps or 4 ev~ kecl
ID47A AmAa.YSL5 TCCUU6~ji.dS Jr a A
AN*LVSIS.,~ IIUL-ri Of DMDWA*L *7 A
P bsAvt~a* Wt. I Pus
*A~bis cPtfo LLEv *p * L V!5iii1 AF$)S
**si. Lwf--t or ","Tot~
ml~r Mc41
54IouLb Nor Aesems~LEW7
ftaS~oAw D*?U ^V t~

uses Or C4LUSIc& 4Ak'
&X#c#& Qdra. Fa* ST*wV4&tA eS f
f S *.igA (wC-K A~ .~4 SI'C$
* Wv~A i, M tm T~iW74e
cU7x* ( mowca.,&;bA,*I
* Oit(,4hDI ~~ * aoNFri..A (efra.

STEPS OP A CLUST(1k AMJAiLYsts$ TV&?
*t() Sh"IC 0 =4 ag, at t
(M Ob SCktV^T I AeJ bit Mr* uS1I #CAjtS-
WC~ b ISse$I IL * t re r$
d, 4 in a~ c'i~*
*egrA~g * CC444 Mrr ~ioiv
oee', 5 'ro ot pw& 'r A L WS1
two -i
(si'~~~~~ tip~ ~tWe1,v 4oi*~C L rE%-

L 0* db C
4% Cal' a i
beje j A it~vr cIWIV u
(rDos-,bLY *&W*lTW*A ff?*T~1s
y Pass/ 6LC?
IVst/c ARI'rE eO

CMIX I. blAmrvot aw v4 A*A oTieewIa
L*#A6vr Aw-tr St7rWC1J ?we csM?eiu
*'rhKCS146,Lb Soft rrpc VAILOE GeivrU AY*w
blS~t . * ry 04 £*eme..mie
Sun~L Sunp vAwm buA17'E4 byAPA~r.
Soft-sunryp * v~Atwr AeDImis om++L
L)I4~pci'rTU ep hi5Siii&*itm i,,mo eer
WELL - POSEG *Nt*cLPO*P
rxA~ OR ftuatT~c PvLY"D*L &A harO
rX ISTEmetav Pj+ J#+T #t .p
lu(pArr #j OP CLUsUert

J* THRC5&4OLb CY AItCAtA
SPLIT OP A CLuSrr& : SftAL&.Usr wh1sum44ir
Amobrcm~ Ao curbDTv tooftat ir *A#&DU *or s
&erw.'es;j Irwo emwr im *v e "v-s,5VA
dtcc )z "Ai
Ri~bug e A Cb9S~& : DVS *.
CPrI'reEs u'P TICK ef4'r-A g~zl Y 0e4 is 9v^u
&r lm-) *Dr#J
(Okcesirca. a r- c,
Ax)i pogn I Ms:1: 7-fts PIPAAlC 4uG&.I*fC*#J A#SrAC-C

SP'LIT F A PA~TOJPg:niu
SPLIT OF: TfflS MA1I'rIeWS C. &U 7PA
htip It M 4 SS,# i i i.Ati ry As-7VT 'CjEA CoW iti rs I.,
at:... nl ijkIt Ift 1 e'i .D 4 C
LrL F A 4*7IDSJ &)CAVr d mC7
op THIS5 P*A7IT10W 's 0CaLUSvCA (Sot n AtX to 4
* (3..01 J,&.E S1.040ci
TAIS PA1WDM lfs &-t.Irra4
0 tar wA

OF 0 ft ,IUpb($ 5.'( t~P4POCh!
TH~o~rno Np ST)Nu~ff ,t it F# £f."vt& * r
coot PL cdra
A55octArr *"rjtTA--M 6zv WIH#
SPLIT V*LUEi Fve4 *LL C.LVSfTC AMO&77"I d7,,A,S
Oj' 0 Alf L£uAL TO -r.6 wcgt?4 op 7rN
06ES OF A tMigji*l HU P*IJSJDOJO ToEc of a
4*AelLAA'4LY I ( M. C A7mrt C j*P. N. If *e) onve ~I w #s,
S , 1&v9.4A Ir # &.900t 87"0 P40 v I PCs ppj&.v vxmo
Sp IT
(71wcjLeD L 4 L64P it 5.1f
jA" (Cq , Ct WIT" I ~i w@ ~.i
p94- m
W It L6 ft) 0
C.&LV5? (W fteposenDt SPLIT)
~ 4P.,\ 4jaC. C ILI ftmm W C16A.4 du £jUC

cxt4hIPl It
0 o~:14C~~ ?P
Rst 4 'teVa'
4 2. U
SOUPTy PP.Cd-fLg -- a-.p-
ea MIA
I LOWIAL 4 1 M s -64 two.
(.OIJ)4t~~ra L&M DPJCO'I.
TI A.SAO P g5j? L )u tvADp e ;A.-

SIMOILE LIOVK4c.( t-L~gue~ $Ee~i VWOL6 Di~
( 09s k ors i~
P0 Iwirtjd.1 S~ar'e'.
F Iw A A sr op 0 A OLl srovf Pain's AL&
A*&#K 946CS op ofur . cjtc&$ou
V44.E &os~ *P MST P-9f4W
romb CeuVSTCQI ciCh. cowM*4 tggrofPegV or
I" *L C.
aBI os 4 a . a ot.b ~orm e
lox

P~t#S.EM L FlINE 4n ~ Ap UP ~4 t rs f .i
op 0 10Ir CLUS TL$
a lbNe~rn I ( 5&ut~crmt * .i. t F47CI
III I I*PI rr p*itl 1Ou *oi At*O E
*L&ktTt9 64APN 40Le*CMG
m ~rre*& A *'Tv
t~. I~7 F.C eF3
CLTgo GF M &*vltl#l I A#e4 OIcLI 04 s NA sC

"PL.Cn tt
'N *Ail MG EFp'C~'r WNCOJ lSIM6 ..
VEAY bISSIftILAR CJTO To CS *7 r"Ie CA/D$ or
CigAIl OP PAIAWISC I in#L4. C~iTt rir iw
vldl
ou~sc~r..s WI$I(#J U1 C .L.A
CV I - toAlrS~o
4 0p4O
~.iPe~eCP A'4 @CPI&

PRM1 L 0PAL6.DVlrfl IN ft$?VGr&
Impos lisll v*&Uac F04 s Ar )
puslul"6VIA1Dt(I ATr CKTACMtVsE or
tll*ugir cbst or To * sr&.uAh SnALCIT .0
iw F&Acra&f weiLKS Feit 'a-loo c,,1,Ttes
W*&(t or THC is 3001c sTAvGTUv.g
A M &LYSI 15es ArsuLrs 'T .oPc84 ?N4C
~e1CSf-PLIT P1*fIS 4 V*AresC ,,4f
awbi c*r. ON s *9 ST~tcw0vA
* SH'&LC cvI6ccvr P*ATWlaeo ~grost C~
S* SU ag(Ac4:c 4, ms~f rest
v"r O tg A rs C

LI
L'
'C Ps, plo,
4*at eveC 4 I'I? ic LACIIrW C
~'4CP,) d-too

C. Ruspini's Data: Partitions Into Four Groups.
-VI/
0 I
- U/
:CLUSTERGRApt1 i A.-S)
: HCLUSTER( .)

tP 0r ##1
thtICA ~ K4AIV .NWvti 9i 1~ bAggC Lq...
I A i r i &.1 s.?# ea
RAM~vK fbe C, aV Now - tmoAc*. &~
I Clio fTeV $oU r*G4 FeaP. *rrse* nL *&,&or
S~t. VIr covfe-s'c. PAe44&,h
nEtJi.I f
1A441 11,
a z .. A
Ik. si I~e % c low
WE POO

Figure 3 Diameter split--ap - Uiform data
d
109
0 21,24 s23 #22
97.9
87.1
* 31
76.4 * 32
g 420143 51 .52
65.744 --54 :53
55.0 o .6 3 62
67 4, 66 6 5
.61o .69 .614L1* 3"611
-. 7144.3 o : 782*72 *82 I
86.85o 95 93 :92I "
33.6.101
103 .. 102.1:04
22.9 6. O5. Son e.E
12.1 Is WI(1$ e
1.143 Is
1.53 6.11 10.7 15.3 19.9

'S
259
Table 2. 24 psychlogi~cal tests ( A fA I
Test B-coeff. 61 bicrit. Factorpartition partition associated
1. Visual Perception I2. Cubes I t Spaial3. Paper Form Board 1 Relations
4. Flags 2
5. General Information 2
6. Paragr Compreihension 3
7. Sentence Completion 2 3 Verbal
. ord Classification 2 3
9. Word Maning 2
10. Adition e e
12. Code 3 4 Perceptual
12. Counting Dots3
13. Straight-Cuirved Capitals3
14. Word Reconition 515. Nuer Reco tion Reconiion16. Figure Recognition 4 ( 5C
.17. Object-Number (4 s
18. Nunber-Figure 4scatv
19. Figure-Word
20. Deduction 5
21. Numerical Puzzles 5
22. Problem Reasoning 5
23. Series Completion 5
24. Arithmetic Problems 5

258
Figure 1. Diameter-split map: 24 psychological tests IA4 bi'* r )1.07 d
1.01
0.942 -21
.23 -22
0.875 024 031
0 32
34 * 330. 35 * 41
142 0-51
0.743
52
o.676 7
0.610 *10~4
I
0.543
0.477
0.410 A

SOME .oo i TAI AirD .usr)Z1O4
PkDSLcIS WI'rq TkRe'SHOLO 7-)'p(
*cit IkiP
piteaLCit 5 FIN )A A wea6H'r comsfRA**/w
Il~xmum$PLir P*,t~irt,# os: io h
t% CLU5SE4.i (EU'ir w e* lf'eT
fl&$Oflvf vciaomr Poo. AC'.Psre*a. w )
0&j v*Lvir p SpLi, postA. * iv1A
v*LUE I- THE CDOC$ OF "rff '%Sr WmTkd01U"
T~Ov~g * .4vmw PP~oitI~J or*VT o , j)11sr4r4c'
or A SeLU1em Z MA P*CKIW6 PkestaD1
Epfgicwr A&L6G4PirmQ Po.~ rmc L,*rrc'
(eta41L4.e T0711 st 14*) AL~w ra iestwg
PAe06teftS Wl7Tm Pi: COO s*P JJD*#AA '( #Wfrv
M*X/muf So.. awucrr/OA;
*P04fth (Arevc~aiesw ro SrYtvcq ' , e#ft.EAA
*A'6*g.D w*A.K wir b.stme-eme

3. hAEI4.)su/it TYPr i C rfE4
* SUln..OF. SPL ITS OF A PDARTIrIO&
i4(.*~~ It* 1% C ile *11 Voi£f
SU .~ OF A iAhCTFAS Or- AX~bTDDD
$u pot .~, T A I*8ulne,,
4 PU- (q~) z hC k
Flewb A SUAMI0iua SPLITS
or"COAC(p.m. 0.7AUPW*Ab 0 . A4M( if) 7WEtC
AM &MmAq~L ?A&?1semp POOL 4P)O flAXIhM SVO - or
L 1Ag.ga Co. l tf t114 1-007k PIT f.TCtA,1
*6T'fc v@A'CL LlkV 46 "0LG.AI'$tor
1'If P0 &(S" C*w V*I SOL Ve L a
V'0 rur *uiA. (04*1f OF T'r ~ SiM 0 L 10 A4 ec

DUAL RPHOF A bCtlbAO6at
% %
17 17
I"' 17
Io
#' Vi
o, /8 01 0 s 0I, I00/ I00e

G u ascyclic . 141 vertices / amIi-s
11
4 X
Il max ixwn sumn- of- s#6s 7wtst..
"a r awrspw 6
kw~qof t6khi u&Lf acorkFWkVAM43

G1'.%
PAOPLE~ ~d ~CA- MII~uPt Sum OP hAlltarict.
THE& ie~m A uP 0 wAL 1 0 ft) ##SY *it0rs
" 00jo.( CASE f t VP904)
AL 40 9 Tb4I US IPJ~ (o~ rA Aa.6r44* Peuqk Met
IL+, 4 (4-- II 0-Ut V
jt VV Al*V &4t)*T'I)'*
Q0 (II a l@e YISVL £4~P *% I5eLV*MALSO/
As NtPeSSe&LEe VA~~ J.' V ~ ESF0 .L =2 0(AtD1)
EFHEMIM (F.tv.0 .74.V"Ajte I I" Tot e~ c4
Tilt wmar6 op
OT fAit~& rig,, tr v7 O(Pi) &4'*gA-,r v44Lvgs v#*4Af
WIT c t &-rono 6* .O(A' eIA) ddAtfUAO

PA06.E 4) FDPJO A n ~Jhton S Um-F -RA Dit~
V I l 6 (P C. jM.LRbSC(PhcMINDM
"tRE1 To V n'x4E-a.#rCe#C4 CASE)
A L S OF lNd7Clt(ST : 'DI"guUS C4SCI esoi. E~et NTAosAW*P14
'AJD' PACw DA" 4 PA'euI
'r vN c4E i Pcom s rg4iriEe

'Kp
>I,MIts
L I r
n I w Et
t-4L
E o e DOI
C. tf'~. '~ .f~~
: IrOTCLC~

SThRA OF A e.LLS1CA C,
V VI A LL EfotI~ o F -1gf CLUSTE& 0 F
T~ $nOP ALL &jsSR,,L*trers 4 17 hsfw( TMC ft4Eb I lJ)
TigA1If (RaY r 9TOWD 110 *U* 7 atCSU
I k
CLS~WCA CL-,?C $ V^ ~
ALL *SDULA4DTir*EoesP*A
£tJ~~~e~eC$n I Mc.TCA
/#W-r (D' V CYTC A$7* Thr 0*421csT
SA A
gp)WOW

PLO&Lrn. to Fui~j A PA4t~r'ioj OF D ImT4
1% CLUSITEA WITH, ,'ga'MUP' SUM -OF$744
4=0-r k P )1AA 04L V1
EALEA~kDT~ l,* ,KoAKC1L 94
IN CAUSTEAIW& 6 flPL VVY at
ALSO VLA$1dM 1v7Im CAPAC?7v/ (Su c o~r4
tivi.V(Y 'Ig e-
Pp,&ur 11 . F/N *T7E'O
( INTOe M CLUS'EAS) W ITH MlauaD4Ui
%vt% op - (L IwS A wdIb mi motiolUD%
W 87H i P NVTS S u hVAA $$I ODSrio LsitDt)
CLOSEL'Y RC9L*rro PX*6LgDr w l 4 EA*.
1% 1c-ftAvs *A A CHI AlitGHD I *-W f"
A ve. VLl TIES
PDA P1,9rb 3M . oT,,c~cA.

1RAtri7gu& OfAl nCirm a OF Ccus-resq AJ44.y.Sis
Fr\#j POA.PEA&?cs
$ DU4Vdct*r c*& A*A P 4iA
.(Vivo&f44 p ,.
(4M vaia*",6 i ~
Ao,*~ cAO. + 6A4 ft TC&A y)' A. ALowee ro
SfV Ceutptcqrf
So* rt cs cvAepi #4~s ^ licI7f T~ f4er~*
0~* M*7'e. At~oMG tdr.## oSrda3 Ait * &m
A44-q

*FAC ILITY LOCATION
PROBLEMS
OW' A SPHERE
Pier're H-anserL /HEC - ERRD M1on rga 1
*roit Taumard 6E )?RD ( E7colpe %oecniue-
de lontrial
S te'rbate K6au /Ecole Poy LecIhnicue dA. Hon /I
NA. D) Skudenl

gae p-l i, T, D
Find- M&9)iiJ.6
_ir ( )Ur
Coc - m -o
COCO COS

Square Small Square Method (/anscn c~
5cjt~ar ntesectfon area 0E .2 tw*c
Lowevr Bo'rcin()
Mip win

(.Dar ~LRao~, RZ)
A s)qbip has lobIe locater) in a speci Fc reyn i-n)jr
* P)i ppine- Basin vilhin 14w. qua~laera) frmeA b
13 t.O 00 6 < 9 4 150.00o
12.500 < T 18.500
anJ mush be. ready Io intervrene in case df nRae,
a an one OF 15 Pen r& in the. easlemr
6misp~ier fleie dcs m ay occur accortlin, 6 avaidle
Fore casLs w),c), are used as .eu Assum;.
A4e cost as a linear furncthOP OF peoJeic di4ance-,
t c c .. (5 I to MMj' 3 e. wef kicd averd~e
of CrcA C- S.tt O- o kIie va r I.auQS c+
s-.. .52.c
1.,),05

Ports and their locAhons
fzrts 9T~) in de~ree~srehs
Mapohi (t6. oo, 3M.hI )
Rm( it. 5 2 4 S. -t)'1
Mord iShu (.. t , 4s.33)
Rbad Jam (30.33, 4R. 2?-) 0.,5
Mvscs (43 C0.5-8.58)0.
C'ris~mas X~s. (-10.5 S0O 105. u)
* aarl (3o..910 115.25)0.
M~anila (14.59, 120 .3s )I
Ta ipe L (..0 1z.so)15
1UP ~ (35.401 f33. -7 )G ua m (&-47, 14.8)Port PMoresl (-.5 10, 16-4)

i erre~ H RN S E N" G ERR D -HEC Monlria I
Gri,4cJRUMPRD ,Ecole. Po)yLe-chniquede. rHontriaI
Bruno SJMEONE Universi~y off Romn&
Marhn KPOMASSE rl5C. SbVcerztOcoac. Polyecchnicu~ Jc, Monlr(4l

oOo
05
Sample z
0a 0 0 0 0 0
Samte iLDeinro grams
1 2.

02 C 0 4 ,/ s1
-- 9
Z- 11-5
3 1010# 8(j- /0 &?7 01fc
4j 32 CC ql 5y 0( ((;10
{3 o, fj07 , {Oi,7{/ f047 {07; {o7 oqI~~~~~ .5a ~I ~;eO~7;{5OJf~
o' { 0+1t7 ~OJq; {07 f0qj os {os 87 -

F'La-
Os 01 o 03O
(good repre erLii t co+oke pt
\% ~boakw he (acfl

*O4 c 08 O. ,3 ,0
Horiphf~ al hhcs mb~re fe-

AVEP6 oLINI(ACE b1I/IiV
HIEr'.4PCHICAL CLUSTCAINC
Ecos. E~ OFE~ nOJ..E4
15PL6IT& 74Ulf
6E~R1~ ECOL& POL.YTECH~JLdL'E hOAJrkE*L
ELI $AbTEr D0* StLVA
FOLYTECIMIAVE nO^)rAE.4L

O~%o,/ s..o* i se&- oFr ye,
-Ddo m~rix dF c;ssiniarb'ies:
C= C,, f par~ili-o? 0F 0 into cludtiers
T7z (§0) seb 0F biftribn5 OF Q1
pI

.-Disir Hiera rch 'ca) Ciusterin /or~im
M do
F, accordirj b0 CriLrxiori I
/ T tr -v e &7, CCOrdr ;
ri ri ,jr j r
L~ma Kimi a o F be. czrage Jissimi/ai-4~
0f 1Ae bats ;iarhbn ror ap ll useers:
C40ose j sud, Lhah- maxi-/I t1

CrItera' Q ,raximigabor 0F ke- civerc~ ,%sm/d elvwe pairs of eibfics one. in t,6 r1 ,~
one in C+
' Prodc1fon dE binary varjates z,,t a sso a led
WAe~ eacJ, erA/ 0,~ e9 suJ w t-
I if va)enc i"
fo A ei dh~,(-
mrx =d n; 2*(Cj) is Kn e__ivamt _
ma_2 S

-I o i ALL 9d "k 70*t 61#k >
EWAh KPEA!
EN wH ILL .
110 0 It6 V TbO Ae-eEl-A*#*Tr j41
0 P bA7)IJC& 0PCAec
* /b ite
~ No) +~ (LA.(I

,E CT A LGo t r mpi
* bNKELSACI.''S Li9P1* (0- CSC
CONSDIA * I4YekaoLic 0-oI Poto6AADI
IAX AI(X)C b (K) > Oft *aL
LVT (x*) . THEM, X* IS #P7IPFAL
IF Aa ooiy i.seu&4 beg) -Npcx4)) e
1TCA~hu AVCOiU C JOS Ikt&?*tAIk'c
A AL 0A 1711)? A AL C, (bovisiy AvrAhor-&ug
Cot CtuLV7laIi 6 )
SEL&CT rlA'i&&.C SOLUTIONJX .'
TAb&i
COMEPLTL VALUE PACX)
Xe
L Eo IE A WCU A. Srl L S $e&UTaom
Tht FLOW9(C&t~~p.

VTR E $c IEEKANJ OP711VAL So~urioxor,ro (~ MYV AN EXCT~ f+-0-'~~
l'Ii ORt AAr vCo u-iePL4A/( omf)
I F (xv ()( X) -N~ 4 "joyTP
*TkikvXSE LTEk~t
UP IPAIU 71 pesc CHM& V#~&&C ALI*
*SONEI

generated problems similar to those of the previous series of experiments are presented in Tables 9and 10. It appears that: (i) HTABU gives slightly better values than HDALC; (ii) computing timesof HTABU are smaller than those of HDALC. Therefore, a direct application of Tabu Search tothe hyperbolic Problem (P) appears to be preferable to the Tabu Search heuristic solution of thesequence of quadratic 0-1 problems given by Dinkelbach's lemma (1967).
BJ HDAL.C DALC
Pulkwa D. 77. M". D,, . M" D. MDri.F77, 7N -9 M 7w ?a 1 ,'
Pg 7 764 73 r13 r73 7w 43P 7W asr To Tn = ?l30 77 623
PS 4 .2 7sa S2 732 a W 2 542P6 S32 732 S L12 ,' SMQ W2 7=3 S32PF46S 7*7 46 465 717 4" 4"s 1- "1s 4' Ot"re. 43 -ok 439 436 704 436 4319 IM 4
pic =3 'm2 330 333 OMg 333 = O "033
tclu (- :6_) 0.01 0.02 0.01 0.10 0.11 0.11 0.31 0.32 032
Table 5: Comparison of heuristics and exact algorithm (13 psychological tests of Harman)
BJ HDALCPaition Dun V,, MD,, Don 'Dm MD.
P, 40 2 4062 40 2 4 2 4 J
P2 IM 3516 I3 2664 434 2664Pg 175 303 1755 256 37n2 No IAA6 66
P 130 3M 130 36 713Ps 131313 334 3M 34
P. 1W 304 ISIS 20 3156 264t ION 3116 IM 2216 3196 264
A3 106 3274 I=6 2112 3025 264Pg 1069 3144 1099 2M 25 24 2uPIo M 3001 M8 193 27W 28
Pic 706 2W66 706 1506 2272 223Pic 447 2653 447 719 127 141
0c.2 (0d) o. 1 0.451 0.43 4.96 151.04 51.02
Table 6: Heuristic solutions for Fisher's iris data (N=150)
14

AVERAGE DISSRIALARTIES
BJ HDALC QDAL; HQDLC
- I- 1706W 1 172412 173145 169610 172373 *T2JY 13 921 172711 1T2991 1707993 17028 170654 170257 171972 171967 164696 171990 172063 164472 1 rM66 171329 161924
100 4 19666 170743 16M66 171591 172201 13344 171644 172401 !63719 173036 171449 15756S 169532 N 1637 1635O32 171034 172421 161765 171183 172821 13473 17232 37115 1539
10 167470 ITO407 167470 16640 172107 16027 164 172324 159029 170146 170919 14022115 164597 170316 164557 166965 171470 154504 16546 171527 153028 Ii310 IT79 1249962 1410 103 171489 173W IS:W 7 171659 1YT5 171480 17240, T1OiW 1491763 171456 174515 16615 171462 173350 i474 171458 174515 166151 I7303S 17.1507 14364
200 4 171290 172602 154544 171221 17500 1512 171299 172602 1S4554 172231 17-2115 1358S 171067 I 3663 171552 1=3340 15733 171067 172697 I363 171274 172390 1563910 170031 171616 143491 166725 172011 147302 17001 171686 143491 16977. 171711 14703515 169642 171329 140615 166041 171306 145602 i6642 171329 140815 149154 1#006 1319967 14 1U, 4 11"17 11s" 147231 r117 1T23W8 1-T7W 14347 17126 1676823 1635$7 169594 109357 171417 17237 167100 171027 173107 168273 171600 172122 166424
300 4 169259 1697 1699 170747 171754 163740 170730 17246 16525,4 171410 172369 1500055 16M 169P.41 16066 1703M 172102 183619 170616 172466 155251 171976 171855 IS407210 1662= 16943 168270 19612 171573 153331 Io7 171906 143663 171245 171661 13"79515 16755 169366 167556 16"444 171069 150221 163672 171054 136313 169601 170923 126190
- 1 W8 1W0372 1U!H T0 IB4 ! 144 1"1'W 1723 171i14 122 ITY'1!4 170O489
3 163227 169346 163227 171302 169744 150428 170645 172536 166749 171417 I7076 161514400 4 1660 160324 19110 171275 170496 16SW.2 170452 171111 155441 1-0413 1 70433 161028
S386924 160320 1l24 172823 170460 153301 1702 17099 15726 1700 170296 15306510 148424 169264 166424 16S644 17052 142275 169731 170970 140173 171373 170210 1335515 167737 1 63221 167737 16P28" 170371 1396"6 162 1n693 13729 163422 170171 121299I lTWY -NOW 139113 7T33 715W -Tom 1171M 171917I T 1s 1 U 11"1(138 i0m3 160131 163235 10131 170567 171630 10770 170373 170162 IS96M I7IO I,0044 161369
S0 4 1 = 16 32 160M36 170373 171235 156738 170233 170816 1566 16996# 169353 1525315 1662 140196 1827 170731 171272 149645 170115 171044 I11156 171144 166624 14582110 166485 169170 166485 19M 170748 138304 149532 170244 12037S 166923 1630 135575
15 1 167941 19140 167941 169031 I170404 13756 166GM 170350 125766 169661 169221 126275
AVERAGE TIME
BJ HDALoC QDALC HQDAL
N D. . MD D.. V . MD. D.. 7. MD... D,. Ua. MD..-1UF -- M -- FI -- OrT -ii"Or -io 10.91 31.23 W15 U F
1.43 1.53 1.49 47.75 54.9 54-97 144.36 149.99 149.9S 139.73 144.14 143.592.14 3.37 3.22 67.21 5.94 6.84 233.46 256.61 256.50 211.8 229.12 229-0
,0 3a 6.37 ,S 130.12 163.23 183.17 342.13 384.36 384.24 326.01 364.84 364.78M 1 6.17 9.3 6.42 147.03 242.93 241.M1 602.21 679.18 6-3.06 5.00 661.33 6 0.19
Table 9: Results for large problems
17

S
Image Representation, Generalized Clustering, and Search in
Proximity Graphs and Pathfinder Networks
Donald W. DearholtDepartment of Computer ScienceMississippi State University.MS 39762
e-mail address: [email protected]: 601-325-2756
Abstract
Pathfinder associative networks (PFNETs) were originated to model humansemantic memory, and have proven particularly effective with associativeaspects of the organization of knowledge. Theoretical connections havebeen established with graph theory, path algebras, proximity graphs,computational geometry, clustering, and search procedures. The PFNET paradigmis being used in human-computer interface systems, and in the organization ofdata in a database for an experimental robotic vision system. Characteristicsof PFNETs include (1) the preservation of minimum-distance paths betweenentities, (2) the clustering of similar entities through the edge structure.(3) the consequent support of higher levels of abstraction, and (4) thecapability of generating proximity graphs, such as the relative neighborhoodgraph and the (open lune) gabriel graph. Monotonic search networks (MSNETs).closely related to PFNETs, provide for search in which no backtracking is evernecessary in domains having (objective) distance measures, and also support theclustering features of PFNETs. These studies have motivated investigations ofcluster learning and conceptual clustering from the perspective of primitivetransformations, with representation of the clusterings by means of PFNETs.Models of cluster learning in which the clusters represent either ordered orunordered sets, and which may or may not overlap, are being considered. Thesequential application of transformations on clusters to a graph-generationalgorithm is being considered as a learning paradigm, and this perspectiveappears to support a constructive view of clustering. Co-occurrence ofentities is an essential component of the process.

PROPERTIES AND APPLICATIONS OF
PATHFINDER-BASED ASSOCIATIVE NETWORKS
Don Dearholt
DEPARTMENT OF COMPUTER SCIENCE
MISSISSIPPI STATE UNIVERSITY
Developed under the sponsorship of:
AIR FORCE HUMAN RESOURCES LABORATORY
INSTRUMENTATION DIRECTORATE,
WHITE SANDS MISSILE RANGE
COMPUTING RESEARCH LABORATORY, NMSU
INTERNATIONAL BUSINESS MACHINES, INC.
NATIONAL SCIENCE FOUNDATION
NATIONAL AERONAUTICS AND SPACE ADMINISTRATION
OFFICE OF NAVAL RESEARCH
S

I
PHILOSOPHICAL STANCE: BETTER MODELING OF HUMANINTELLIGENCE WILL LEAD TO BETTER Al
THE NETWORKS WE ARE STUDYING:
DESCRIBE, SUMMARIZE, AND DISPLAY DATA
SUGGEST A PSYCHOLOGICAL MODEL ABOUT
MENTAL REPRESENTATIONS
COMPLEMENT MDS AND CLUSTER ANALYSIS
PROVIDE A PARADIGM FOR:
KNOWLEDGE REPRESENTATION
MODELS OF CLASSIFICATION
ORGANIZATION OF DATABASE SYSTEMS
SPREADING ACTIVATION (SEARCH)
D

p
OUTLINE
I. MOTIVATION, PERSPECTIVE, AND OBJECTIVES
II. PATHFINDER NETWORKS
A. DEFINITIONS AND PROPERTIES
B. APPLICATIONS
* III. CLUSTER LEARNING AND DYNAMIC SYSTEMS
A. MOTIVATIONS AND APPROACH
B. DEFLNITIONS AND PROPERTIES
C. APPLICATIONS
I

* RESEARCH OBJECTIVES
I. THEORETICAL
DEVELOP AND TEST METRICS
RELATIONSHIPS:
GRAPH THEORY
PATH ALGEBRAS
PROXIMITY GRAPHS (RNG, GG, DTG)
LEVELS OF ABSTRACTION
I. EMPIRICAL
SEMANTIC MEMORY
CLASSIFICATION MODELS
PROPOSITIONAL ANALYSIS
KNOWLEDGE EXTRACTION FROM EXPERTS
III. APPLICATION DOMAINS
ORGANIZATION OF CONCEPTS
INTERFACES--INFORMATION RETRIEVAL, HELP SYSTEMS
DATABASE ORGANIZATION
PERCEPTION--OUTLINES OF OBJECTS
p

THE BIGGEST CHALLENGE
FOR Al AND COGNITIVE MODELING:
TO DESIGN A SYSTEM WHICH DOES MANY THINGS WELL,
ALTHOUGH EACH ALGORITHM MIGHT NOT BE OPTIMAL
ASSOCIATIONAL ORGANIZATION
CLUSTERING
"p SEVERAL LEVELS OF ABSTRACTION
CLASSIFICATION
SEARCH
DESCRIPTION OF DECISIONS
p

I
DEFINITION
A PATHFINDER NETWORK (PFNET) IS A GRAPH BASED ON(
PAIRWISE ESTIMATES OR MEASURES OF DISTANCES
BETWEEN ENTITIES.
EACH ENTITY CORRESPONDS TO A NODE.
EACH PAIR OF NODES IN A PFNET IS CONNECTED DIRECTLY
BY AN EDGE WHOSE WEIGHT IS THE DISTANCE BETWEEN
THE TWO ENTITIES,
UNLESS THERE IS A SHORTER ALTERNATIVE PATH.
I
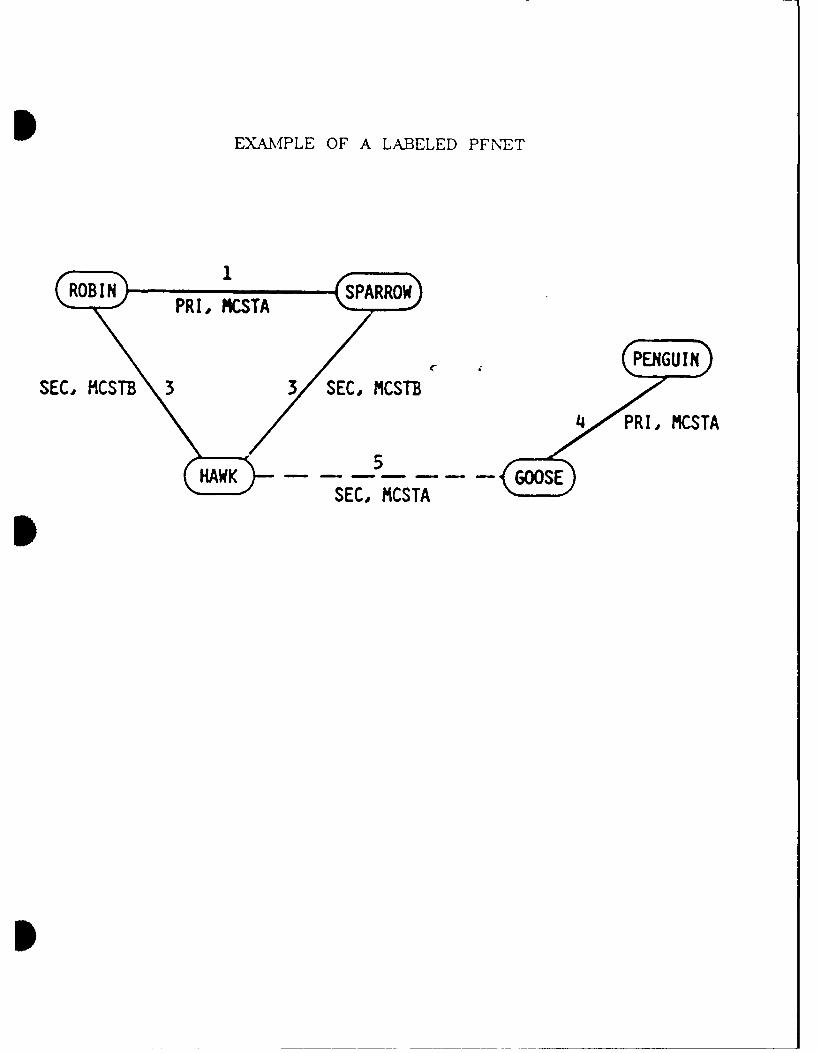
EXAMPLE OF A LABELED PFNTT
SECMCST 3 37SECo. MSTBPENGUIN
4 PR!,o MCSTA
HAWK GOOSESECo MCSTA

DIRECTED PFNET FOR NINE COUNTRIES
p
14
RUSI
FRANCE
NGLAND
USA CUBA
27 MEXICO 1
17JAMAICA
R-METRIC IS INFINITY
G-PARAMETER IS EIGHT

LDOCE: AMBIGUITY RESOLUTION
totallarge (orw
size amount sum
exchange cheque band o ioec
s a e aoss

TOUCHSCREEN DISPLAY FOR EMPIRICAL DATA
HOW SIVLAR IS A TO B?
A
1t
B
OK +
DISTANCE + SIMILARITY --- K
THE PARAMETERS OF A PFNET
R-METRIC:
RULE FOR FINDING THE LENGTH OF A PATH WITH KEDGES
K
L(P) WR]IIR
1=1
R PATH LENGTH DATA SCALE
I SUM OF WEIGHTS RATIO
2 EUCLIDEAN RATIO
00 MAXIMUM WEIGHT RATIO, ORDINAL

0
THE PARAMETERS OF A PFNET
Q-PARAMETER:
"DIMENSION" OF GENERALIZED TRIANGLE INEQUALITIES SATISFIED
B
A1 C* I
D
A <[BR-CR+DR]I lR
0

THE TRIANGLE INEQUALITY
B
Ai E C
D
E B +C
A <E +D B +C +D
THE GENERALIZED TRIANGLE INEQUALITY
-- B
A c
D
A _ [BR+CR+DR]IlR
PURPOSE: TO PRESERVE MINIMAL-DISTANCE PATHS
p

THEORETICAL RESULTS
FOR A GIVEN DISTANCE MATRIX,
PFNET(R ,Q):
IS UNIQUE,
PRESERVES GEODETIC DISTANCES,
LINKS NEAREST NEIGHBORS, AND
CONTAINS THE SAME INFOPMATION AS THE
MINIMUM METHOD OF HIERARCHICAL CLUSTERING
PFNET(R =-,,Q =N-l) IS THE UNION OF ALL MINTREES
PFNET(R 2,Q) IS A SPANNING SUBGRAPH OF PFNET(R I,Q)
IFF R 1_R 2
PFNET(R ,Q 2) IS A SPANNING SUBGRAPH OF PFNET(R ,Q 1)
1FF Q 1<Q 2
MONOTONIC TRANSFORMATIONS PRESERVE
STRUCTURE FOR ALL PFNET(R =oo,Q)
MULTIPLICATIVE TRANSFORMATIONS PRESERVE
STRUCTURE FOR ALL PFNET(R, Q)
S

S
~1
~i1
S

0 CO 0
A M
-n -n un 'n-
.-- ~ 0
E- ..- v~ LIC)
w- 4)O A2
C)3
on -LLu~ .. ~-.n c
VZ 0T c) r-
o C3C:)W~* II 0
so C.
C _D
co1
1 0am
IW 4w -
00-0
Op" M
*0v

COMPUTER VISION
GOAL: SCAN THE ENVIRONMENT AND MAKE DECISIONS
WITHOUT HUMAN INTERACTION
REQUIRES: KNOWLEDGE REPRESENTATION
CLASSIFICATION
, ABILITY TO DESCRIBE SCENE
RECONSTRUCT SCENE
ENHANCE SCENE
MODIFY SCENE

IA
a L
m 4
0-
0 94-LL 0
0
4-
zz
u-a
00
02 CD
QE
Ms0Io

A HIERARCHY OF
EMPTY NEIGHBORHOOD GRAPHS
PFNET (L 2, oo, N-1)
RNG (L 2 ) = PFNET (L 2' oo 2)
PFNET (L 2, r, 2)
GG (L 2 ) MSNET(L 2 )
MGG (L 2 ) = PENET (L 2' 2, 2)/
DTG (L 2)
PFNET(L 2, 1, 2)
EACH GRAPH IS A SPANNING SUBGRAPH
OF THE GRAPH BELOW IT

IC
oo<>
II

I
U
U
0
0
I -
U
/
I

I
p 7/
bQQ
~o-o/I
/ C>\OQ//
/
I /
~-JLJ
0
~42~ ________~-fKu~A/
/ z
//'r~fl
it ~j
U
,,/I _____ ii

MOTIVATIONS FOR STUDY OF CLUSTERINGS
LEARNING VIA CLUSTERINGS
MODEL DYNAMIC SYSTEMS
UTILIZE PATHFINDER NETWORKS
ASSOCIATIVITY
CLUSTERING
LEVELS OF ABSTRACTION

p
CONCEPT/CLUSTER LEARNING MODEL
SHOULD SUPPORT:
SETS OF CLUSTERS AS THE DOMAIN
PROGRESSION THRU CLUSTERINGS AS LEARNING OCCURS
p A DISTANCE MEASURE BETWEEN CLUSTERINGS
INTERPRETATION WITHIN THE PATHFINDER PARADIGM
p

I
MODEL FOR DYNAMIC SYSTEMS
SHOULD SUPPORT:
SETS OF CLUSTERS AS THE DOMAIN
PROGRESSION THRU CLUSTERINGS AS SYSTEM CHANGES
A DISTANCE MEASURE BETWEEN CLUSTERINGS
PATHFINDER OR PROXIMITY GRAPH PARADIGM
I

ADVANTAGES
PSYCHOLOGICAL FOUNDATIONS
REPETITION OR REHEARSAL CAN BE MODELED
REPRESENTATIONS AS ASSOCIATIVE GRAPHS
KNOWN GRAPH-THEORETIC PROPERTIES
VERIDICAL GRAPHICAL DISPLAY

I
ASSUMPTIONS
NOTATION DENOTES CLUSTERS VIA ()s
CO-OCCURRENCES DERIVED FROM ()s NOTATION
FEATURES OF ENTITIES WON'T BE CONSIDERED
S REPETITION INCREMENTS CO-OCCURRENCE
CO-OCC + DISSIM = CONSTANT
I

I
TWO MODELS:
1. SEQUENTIAL LEARNING PARADIGM
i 2. CONCURRENT (SNAPSHOT) PARADIGM
I

I
METRIC AXIOMS
REFLEXIVITY
SYMMETRY
TRIANGLE INEQUALITY--INVALID FOR CO-OCCURRENCES
IPFNs IMPOSE THE GENERALIZED TRIANGLE INEQUALITY
I

COMPONENTS OF THE MODEL
DOMAIN D = (A, B, C, D, ... I
SAMPLE CLUSTERING Ci = ((A, B, C), D, E)
PRIMITIVE OPERATIONS
ADD ENTITY TO D
REMOVE ENTITY FROM D
MERGE TWO CLUSTERS INTO ONE CLUSTER
SPLIT ONE CLUSTER INTO TWO CLUSTERS
WHERE AN ENTITY IS A CLUSTER

EXAMPLE: THE LEARNING PARADIGM
CO = [AB, C, DEqF)
so= -000000 -000000 -000000-0 00000 -00 0000-
Cl ( (A, B, C), D, E, F)
S1= -110001 -100011 -00000 0-000000 -0
A 1 B @ 000000-I

EXAMPLE CONTINUED:
C2 =((A, B, C)2, (D, E), F}
S2= -220002-200022-000
I0 0001-0A 0000 0-
C3 =((A, B, C)3, ((D, E), F))
S3= -330 003-300033 -000000-21
A BD E 001
11 33C F

EXAMPLE CONTINUED:
C4 = (A, B, C)4, ((D, E), F)2, (B, D)}
S4= -440004-410044-0000 10-3 2
4 2 000320-

EXAMPLE: THE CONCURRENT PARADIGM
C = [(A, B, C), ((D, E), r'), (B, D)}so= - 11 00 0
1 -1 10 0
0 10-21
A DE 0 00 10-

APPLICATIONS
METRIC FOR DIFFERENCES IN EXPERTISE
IDENTIFICATION OF ERRORS
CONSENSUS
AUTOMATIC SYSTEM ADAPTATION WITH LEARNING
HUMAN-COMPUTER INTERFACE
ROBOTICS VISION DATABASE

TRANSFORMATIONS, DISTANCE,
AND DISTANCE GRAPHS
Gary ChartrandWestern Michigan University
ABSTRACT
Several transformations are described - between graphs and between subgraphs in a graph.Each of these transformations gives rise to a distance (between graphs or between subgraphs in a
graph). The relations between collections of graphs or between the subgraphs of a specified size
within a (connected) graph can be described by graphs themselves, called distance graphs. In.addition to describing these concepts, another distance between induced subgraphs of a specified
order and the corresponding distance graphs are also discussed.

2
Introduction
The distance between two vertices in a connected graph is the length of the shortest path
connecting the vertices. Distance is one of the most fundamental concepts in graph theory.
Algorithms for determining distance in graphs are well known while applications involving
distance in graphs are varied and numerous. Indeed, so much work has been done on this subject
that Buckley and Harary wrote a book in 1990 entirely devoted to distance in graphs. Distance in
graphs has been generalized in several ways, most notably perhaps to Steiner distance.
The combination of distance and graphs occurs in many other ways. One of these concerns
distance between graphs. It would be more accurate to speak of distance between certain pairs of
graphs because in many instances distance is defined between graphs having some specified
properties. In all such distances, the distance between two graphs is 0 if and only if they are
isomorphic. Hence, the distance between two graphs is a measure of the structural difference
between the graphs.
Transformations
Some distances between graphs involve the idea of transformations. Let G and H be
two (p, q) graphs. We say that G can be transformed into H by an edge rotation if Gcontains distinct vertices u, v, and w such that uv r E(G), uw e E(G), and H - G - uv + uw.
More generally, we say that G can be r-transformed into H if there exists a sequence G = G0,
G 1 ... , Gn = H (n > 0) of graphs such that Gi can be transformed into Gi+ by an edge
rotation for i = 0, 1, ..., n - 1.
An edge slide is a restricted version of an edge rotation. A graph G can be transformed
into a graph H by an edge slide if G contains distinct vertices u, v, and w such that uvE
E(G),vw E E(G), uw 0 E(G) and H = G - uv + uw. If a graph H is isomorphic to a graph G
or H can be obtained from a graph G by a sequence of edge slides, we say that G can be s-
transformed into H. For example, the graph H of Figure 1 can be obtained from the graph G
by an edge rotation, but H cannot be obtained from G by an edge slide. On the other hand, the
graph H' can be obtained from G' by an edge slide (as well as by an edge rotation).

3
V W V wG: V2 H: ZU Z U Z
V W V W
U Z U Z
Figure 1
It was shown by Chartrand, Saba, and Zou that every (p, q) graph G can be r-
transformed into any other (p, q) graph H. It was also shown by Johnson that s-transformation
preserves connectedness. Further, a graph G can be s-transformed into a graph H if and only if
G and H have the same number of components and corresponding components of G and H
have the same order and same size.
SMetrics Based on Transformations
Associated with these transformations are two metrics defined on graphs. Let G and H
be two graphs having the same order and same size. The edge rotation distance or, more simply,
the r-distance dr(G, H) between 6 and H is the smallest nonnegative integer n for which
there exists a sequence G 0, G 1, ..... G n of graphs such that G6= G0, H =G, and G i can be
obtained from G_ by an edge rotation for i =1, 2, ..... n. For example, the edge rotation
distance between graphs G and H shown in Figure 2 is dr(G, H) = 3.
G: p OH:C 0
Figure 2
The following properties of edge rotation distance were established by Chartrand, Saba,
and Zou.
S

4
Proposition 1 If G and H are two graphs having the same order and same size, then
dr(G, H) = dr(G, H).
It was shown that every nonnegative integer is the r-distance between some pair of graphs.
Proposition 2 For every nonnegative integer n, there exist graphs G and H such that
dr(G, H) = n.
Prior to presenting an upper bound for the r-distance between two graphs, we introduce
another concept. For nonempty graphs G1 and G2, a greatest common subgraph of G1 and G2
is defined as any graph G of maximum size without isolated vertices that is (isomorphic to) a
subgraph of both G1 and G2.
Proposition 3 Let G and H be two (p, q) graphs with q > 1, and let s be the size of a
greatest common subgraph of G and H. Then dr(G, H) < 2(q - s). Moreover, this bound is
sharp.
Another distance between graphs is associated with edge slide and was discussed by
Johnson and by Benadd, Goddard, McKee, and Winter. Let G be a graph with components Gi,
* 1 i < k, and H a graph with components Hi, 1 < i < k, such that Gi and Hi have the same
order and same size. We define the edge slide distance or, simply, the s-distance ds(G, H)
between G and H as the smallest nonnegative integer n for which there exists a sequence GG0, G1 = .... Gn H of graphs such that, for i = 1, 2, ... , n, Gi can be obtained from Gi 1 by
an edge slide. If G and H are the graphs presented in Figure 3, then the edge slide distance
between G and H is ds(G, H) = 2.
G: H:
<XFigure 3
Note that dr(G, H) = 1 for the graphs G and H of Figure 3. It is straightforward to
show that dr(G, H):5 ds(G, H) for every pair G, H of connected graphs having the same order
and same size. The following result is perhaps less obvious.

5
* Proposition 4 For every pair m, n of positive integers with m < n, there exist graphs G andH such that dr(G, H) = m and ds(G, H) = n.
Distance Graphs
Let S be a set of (nonisomorphic) (p, q) graphs. Then we define the edge rotation
distance graph Dr(S) of S as the graph with the vertex set S such that two vertices G and H
of Dr(S) are adjacent if and only if dr(G, H) = 1. A graph F is an edge rotation distance graphif F = Dr(S) for some set S of graphs.
Let S' be a set of (nonisomorphic) graphs having the same number of components,
labeled in such a way that the ith components of all graphs have the same order and same size.Then we define the edge slide distance graph Ds(S') of S' analogously.
It was shown by Chartrand, Goddard, Henning, Lesniak, Swart, and Wall that every
graph is an edge slide distance graph and it was conjectured that all graphs are edge rotationdistance graphs. A number of classes of graphs are known to be edge rotation distance graphs.
The next two results are due to Chartrand, Goddard, Henning, Lesniak, Swart, and Wall.
* Proposition 5 Complete graphs, cycles and trees are edge rotation distance graphs.
Proposition 6 Every line graph is an edge rotation distance graph.
Proposition 7 (Faudree, Schelp, Lesniak, Gyrfds, and Lehel) The complete bipartite graphsK3,3 and K2,p (p _ 1) are edge rotation distance graphs.
Proposition 8 (Jarrett) For every pair m, n of positive integers, the graph Kmn is an edge
rotation distance graph.
F-Transformations
Let G and H be two (p, q) graphs, both containing a subgraph isomorphic to a givengraph F of order at least 2. We say that G can be transformed into H by an F-rotation (orsimply, G can be F-rotated into H) if there exist distinct vertices u, v, and w of G and asubgraph F' of G isomorphic to F such that u e V(F'), (v, w) 9 V(F'), uv e E(G), uw eE(G), and H = G - uv + uw. For example, if F - K1,3, then the graph G of Figure 4 can beKi, 3-rotated into H and H'.

G: H:v W
x x x
U ZU Z U Z
Figure 4
More generally, we say that a graph G can be F-transformed into H if either (1) G =_H
or (2) there exists a sequence G = Go, GI, ..., Gn = H of graphs such that, for i = 0, 1, ... ,
n - 1, the graph Gi can be F-rotated into Gi+1 . For instance, the graph G of Figure 5 cannot
be K1,4-rotated into H, but G can be K1,4 -transformed into H.
G( = Go): G1• H(= G2):
Figure 5
Observe that K 2-rotation and K2 -rotation are edge rotation and edge slide, respectively.
Clearly, if a graph G can be F-transformed into a graph H, then G and H have the same
order, same size, and both contain a subgraph isomorphic to F. Unfortunately, the converse is
not true, in general. For instance, the graphs G and H of Figure 6 have the same order andsame size, and both G and H contain a subgraph isomorphic to C4 , but G cannot be C4 -
transformed into H. In fact, G can be C4 -transformed only into itself.
p

7
G: ~H
:C
Figure 6
One may ask the question: What are necessary and sufficient conditions for one of two
graphs G and H to be F-transformed into the other? We have already seen the answer to this
question if F = K2 or F = K2. The following results are due to Jarrett.
Proposition 9 Let F be any nontrivial connected graph. If a connected graph G can be F-
transformed into a graph H, then H is connected.
Corollary 9a Let F be a nontrivial connected graph. A graph G can be F-transformed into agraph H if and only if the graph G has components G1, G2, ..., Gk, the graph H has
components H1, H2, ..., Hk, and Gi can be F-transformed into Hi for every i (1 <i <k).
Proposition 10 Let F be a connected graph of order p' with 8(F) = I, and let G and H
be two (nonisomorphic) connected (p, q) graphs, each containing an induced subgraph
isomorphic to F. Then G can be F-transformed into H.
Next we show that if 8(F) > 1 or F is not an induced subgraph of G or H, the result
does not necessarily hold. For example, for the graph F of Figure 7 we have 8(F) = 2 > 1.
Although the graphs G and H contain F as an induced subgraph, G cannot be F-transformed
into H. In fact, G cannot be F-transformed into any graph different from G.
F: G: H:
Figure 7
For the graph F of Figure 8 we have 8(F) = 1, but F is not an induced subgraph of G,
and H cannot be obtained from G by an F-transformation. Indeed, G can be F-transformedP only into itself and graphs G' and G" of Figure 8.

. °<88ID ~~~F: o>
G ( H:C>
Figure 8
With each F-transformation another metric can be defined. Let F be a graph of orderp' : 2 and let S be a set of (p, q) graphs such that for every pair G, H of graphs in S, the
graph G can be F-transformed into H. The F-distance F-d(G, H) between G and H is
defined as the minimum number of F-rotations necessary to transform G into H. For the graphs
F, G, and H of Figure 9, we have F-d(G, H) = 2.
l* F: G: H:
Figure 9
If a graph G cannot be F-transformed into a graph H we set F-d(G, H) = 00. It is
obvious that K2-d(G, H) : F-d(G, H).
Proposition 11 Let F be a graph of order p ( 2) and let n be a nonnegative integer. Then
there exists a pair G1, G2 of graphs such that F-d(G 1, G2) = n.
Let F be a graph of order p' (> 2) and let S be a set of (p, q) graphs, each containinga subgraph isomorphic to F. Then the F-distance graph D(S) of S is that graph whose vertex
set is S and in which two vertices G and H are adjacent if and only if F-d(G, H) = 1. Forexample, if F - K3 and S is the set of graphs G1, G2, G3, and G4 shown in Figure 10, then
S(S) =- K4 - e.S

G2G:
G3
Figure 10
Proposition 12 Let F be a nontrivial connected graph. Then every graph is an F-distancegraph.
Subgraph Distance
Let G, and G2 be edge-induced subgraphs of the same size in a graph G. The subgraphG2 can be obtained from G1 by an edge rotation if there exist distinct vertices u, v, and w suchthat uv = E(G1), uw O E(G1), and G2 = G1 - uv + uw. More generally, G1 can be r-
transformed into G2 if GI = G2 or G2 can be obtained from G1 by a sequence of edge
rotations. It was shown by Chartrand, Johns, Novotny, and Oellermann that every edge-inducedsubgraph of a connected graph G can be r-transformed into any edge-induced subgraph of Ghaving the same size. The edge rotation distance dr(GI, G2) between G1 and G2 is theminimum number of edge rotations required to r-transform G1 into G2. For the graph G ofFigure 11, the subgraph G3 can be obtained from G1 by an edge rotation so that dr(Gl,G3) "-1.On the other hand, G3 cannot be obtained from G2 by an edge rotation, but G3 can be obtained
from G2 by an r-transformation and dr(G2, G3) = 3.

10
z z v
x Y u t yU
G2 : z v G3:
x y y u
Figure 11
One can also define a subgraph transformation based on edge slide. Let G1 and G2 be
two edge-induced subgraphs of the same size in G. We say that G2 can be obtained from G,by an edge slide if there exist distinct vertices u, v, and w of G such that uv E E(G1 ), uw 4
E(G1), vw E E(G), and G2 = GI - uv + uw. For example, for the graph G of Figure 12, the
subgraph G2 can be obtained from G, by an edge slide. More generally, we say that G, can
be s-transformed into G2 if either (1) G, = G2 or (2) G2 can be obtained from G 1 by a
sequence of edge slides.
w wG: GI: G2:
v U v u v U
z z z
Figure 12
As we mentioned earlier, for every pair H, H' of edge-induced subgraphs of the same size
in a connected graph G, the subgraph H can be r-transformed into H'. Unfortunately, this is
not the case for s-transformations. For example, if G is the graph of Figure 13, then H cannot
be s-transformed into H'. In fact, H can be s-transformed only into itself.
I

11
G: H. H': V\ X
u w y u w w y
Figure 13
Let e and f be edges of a graph G. A triangular e-f walk of G is a finite, alternating
sequence e = e0 , T 1 , e l , T 2, ..., en_ 1, Tn , en = f of edges and triangles such that ei_1 and e i
belong to Ti (1 < i < n). A triangular e-f path is a triangular e-f walk in which no edges or
triangles are repeated. The number n of triangles in the triangular path is called its length. In the
graph G of Figure 14 there exists a triangular e-f path (with Ti = ({ei_ 1, el}), i = 1, 2, 3), but
there is no triangular e-g path.
e = e el e2 e3 =f g
Figure 14
It is straightforward to show that every triangular e-f walk in a graph contains a triangular
e-f path.
Observe that for every two edges e and e' of a triangle T, the subgraph ({e')) can be
obtained from (fe)) by an edge slide. Therefore, if in a graph G there exists a triangular e-f
path, then G1 = ({e)) can be s-transformed into G2 = ({f).
Whenever edges e and f belong to a 3-cycle in G, we denote this triangle by T(e, f)
and call it a slide induced triangle. With every edge slide there is associated a unique triangle T,
namely, if G2 = G, - e + f, then T = T(e, f). These observations are useful in proving the
following result by Jarrett.
Proposition 13 Let G be a connected graph of size q a 1, and let q' be an integer with
1 < q' < q. For every pair G1, G2 of subgraphs of G having size q', the subgraph G, can be
s-transformed into G2 if and only if every two edges of G are connected by a triangular path.
I

12
Triangular Line Graphs
For a given graph G, we define its triangular line graph 7(G) as that graph with vertex set
E(G) such that two vertices e and f of '2(G) are adjacent if and only if T(e, f) is a triangle of
G. For G = K4 - e, the graph 7(G) is shown in Figure 15.
G: e3 "(G): e2 e3
eee
el el e4
Figure 15
It follows from the definition that '7(G) is a spanning subgraph of the line graph L(G).
The next result is perhaps less obvious. These are due to Jarrett.
Proposition 14 Let G be a connected graph of order p > 2. Then '1(G) = L(G) if and only
if G = Kp.
Proposition 15 Let G be a connected nontrivial graph. For every pair G1, G2 of edge-
induced subgraphs of G having size 1, the subgraph G, can be s-transformed into G2 if and
only if '(G) is connected.
Corollary 15a Let G be a nontrivial connected graph. Then for every pair G 1, G2 of edge-
induced subgraphs of G having the same size, G, can be s-transformed into G2 if and only if
'7(G) is connected.
For integers n > 2, the nth iterated triangular line graph T'n(G) of a graph G is defined
to be '7(Tn-l(G)), where T'(G) denotes 7(G) and Tqn-(G) is assumed to be nonempty.
Clearly, Tn(G) is a subgraph of the nth iterated line graph Ln(G) of G. In fact, for n =
1, 'T1(G) = "7(G) is a spanning subgraph of L1 (G) = L(G).
Note that every triangle T in G gives rise to a triangle T' in '2(G) with a one-to-one
correspondence between the edges of T and the vertices of T'. Moreover, if T1 and T2 are two
triangles of G, then the corresponding triangles T' and Tj of '1(G) are edge-disjoint. For
suppose, to the contrary, that T' and Tj have an edge in common or, equivalently, T' and T'

13
have two common vertices, say e and f. Necessarily, e and f are common edges of T1 and
T2, which implies that T1 = T2 . Thus '7(G) has at least as many triangles as G has. We show
that only for K4 -free graphs G are the number of triangles in G and '7(G) equal.
Proposition 16 Let t(G) denote the number of triangles in a graph G. Then t(G) = t(7(G))
if and only if G is K4-free.
Proposition 17 Let G be a K4-free graph. Then Tn(G) = T 2 (G). for n > 2.
The previous result does not hold for a graph G = K4 . However, T 3(K4 ) = 8K3 and,
therefore, for n > 3 we have Tn(K4 ) = T 3(K 3). The graphs G = K4 and Ti(K4 ), 1 < i < 3,
are shown in Figure 16.
Conjecture For every graph G containing at least one triangle, there exists an integer k > 0,
such that for n > k, Tn(G) = Tk(G).
G'7(G):
T 2 (G): T 3(G):
Figure 16
n-Subgraph Distance Graphs
The n-subgraph distance graphs were introduced by Chartrand, Hevia, Jarrett, Saba, and
VanderJagt. Let G be a graph of size q (> 1) and let n be an integer with 1 < n < q. The n-
subgraph distance graph Ln(G) of G is that graph whose vertices correspond to the edge-

14
induced subgraphs of size n in G and where two vertices of Ln(G) are adjacent if and only if. the edge rotation distance between corresponding subgraphs is 1. It is convenient to label thevertices of Ln(G) by the edge sets of the corresponding subgraphs or simply by listing the edges.
Each edge in a vertex label is called a coordinate. Since the coordinates are elements of a set, the
order in which the coordinates of a vertex are listed is irrelevant. For example, if a vertex ofLn(G) corresponds to the subgraph of G induced by the edge set (e l , e2, ..., er}, then we may
label this vertex as e l , e2, ..., en or ei u X, where X = (ejI 11 _j < n,j * i, or simply as eiX.
For the graph G K1 + (K1 u K2) of Figure 17, the graphs Li(G), i = 1, 2, 3, 4, are shown.
aa
G: 0L()
bb c
dd
L2b L3 (G): bcd
a, acd Cabd
abc
bd cd
L4(G): abcd0
Figure 17
Observe that L4 (G) = K1 for the graph G of Figure 17. In general, Lq(G) = K1 for a
graph G of size q. Furthermore, LI(G)= L3 (G) for the graph G of Figure 17. This fact
illustrates the following result.
Proposition 18 Let G be a graph of size q, and let n be an integer with 1 < n < q. ThenLn(G ) = Lq-n(G ).

15
The graphs Ln(G), 1 < n < q = E(G), are also called generalized line graphs since the 1-
subgraph distance graph LI(G) is the line graph of G. We shall also refer to these graphs as n-
subgraph rotation distance graphs to distinguish them from the n-subgraph slide distance graphs,
which we are about to describe. We begin with the definition of n-subgraph slide distance.
Let G be a graph of size q (> 1), and let G1 and G2 be two edge-induced subgraphs of
G having the same size n (1 < n < q). We define the n-subgraph slide distance ds(G 1, G2)
between G, and G2 as the smallest nonnegative integer k for which there exists a sequence
H0 , H I, .... Hk of subgraphs of G such that G, = H0,G 2 = Hk and, for i= 1,2 ... k,H i
can be obtained from Hi_1 by an edge slide. If no such k exists, we define ds(G1, G2) = 00. If
G = K4 - e, and G1 and G2 are two subgraphs of G shown in Figure 18, then
ds(GI, G 2 ) = 2.
G: b GI" b G2:
a c
Z I 0____d d
Figure 18
We define the n-subgraph slide distance graph Sn(G) of G as the graph whose vertices
correspond to the edge-induced subgraphs of size n and where two vertices G1 and G2 of
Sn(G) are adjacent if and only if ds(G 1, G2 ) = 1. It is straightforward to see that SI(G) = !(G),
and, therefore, SI(G) is a spanning subgraph of LI(G). In general, for n >_ 1, Sn(G) is a
spanning subgraph of Ln(G). For the graph G = K4 - e, the graphs Si(G), 1 < i ! 5, are shown
in Figure 19.

16
G: b SIG: a b
azcZ
d d c
ceabd ade acd
bd ace
S4(G): S5(G) =-K1 :
bcde acdeabcde
abee abde
Figure 19
Observe that for the graph G =-K4 - e, we have S2(G) S3 (G) and SI(G)- S4 (G).
This fact can be generalized as follows.
Proposition 19 Let G be a graph of size q Q: 1) and let n be an integer with 1 n < q.
Then Sn(G) =-Sq-n(G).

17
Subgraph Distance for Subgraphs of the Same Order
For a connected graph G of order p and an integer n such that 1 < n < p, let F and H
be induced subgraphs of G of order n. We define a pairing 7C from the set V(F), say {v1, v2 ,
.... vn }, to the set V(H) as a one-to-one correspondence that associates a vertex of V(F) with
one of V(H). The distance induced by 7c between F and H is defined as
n
dg(F, H) = d(vi, it(vi))i= I
and the subgraph distance between F and H is
d(F, H) min 4(F, H).
This concept was introduced by Chartrand, Johns, Novotny, and Oellermann. Observe that if F
consists of a single vertex, say u, and H consists of a single vertex, say v, then d(F, H) = d(u,
v). Thus d(F, H) is a generalized distance defined in terms of subgraphs. As an example, Figure
20 gives a connected graph G, two induced subgraphs F and H of G, a listing of all pairings.from V(F) to V(H), and d(F, H).

18
Vi Ul Vi
G: F: _H: 0u1 x y
U2 (
U3 V2 V3
U3 W V2 V3
Pairings ui Vi d(u i, vi) dnk(F, H)u1 v1 2
U u2 V2 3 8
U1 V1 2It2 U2 V3 4 8
U3 V2 2Ul V2 3
7C3 U2 V 1 3 9
_ _u3 v3 3
Ul V2 3714 u2 v3 4 10
u3 Vl 3
uI v3 45 u2 Vl 3 9
U3 v 2 2uI v3 4
6 u2 v2 3 10
I u3 V1 3
d(F, H) = 8
Figure 20

19
n-Vertex Graphs
Let G be a connected graph of order p and let F and H be subgraphs of order n with
1 _< n _ p - 1. Then d(F, H) = 1 if and only if there exist adjacent vertices u r V(F) and v E
V(H) such that V(F - u) = V(H - v). We define the n-vertex graph of G as that graph Gn
whose vertices are the induced subgraphs of order n in G and two vertices F and H of Gn are
adjacent if and only if d(F, H) = 1. A graph and its 2-vertex graph are shown in Figure 21.
G j: G2
Figure 21
01,

The optimality of clustering and monotone optimal assembliesbyUriel G. Rothblum
The purpose of the study is to present recent resultswhich provide sufficient conditions for the optimality ofclustered partitions. In particular, we Introduce a formaldefinition of clustering by calling a partition clustered ifconvex hulls of the sets of the partition are disjoint* It isshown that if given vectors Al , so. , An In Rk are to bpartitioned into m groups, of predetermined sizes, so as tomaximize an objective which is a quasi-convex function ofthe sums of the vectors in each set, then a clustered optimalpartition exists. Further, if quasi-convexity is replaced bystrict quasi-convexity, every optimal partition is clustered.Computational implications of the results are discussed.
The techniques we developed enabled us todetermine sufficient conditions for the optimality ofmonotone assemblies. Here we consider the probles ofS identifying multipartitions which occur when items ofdifferent types are to be partitioned into sets, for example,in system assembly, components of different type areassigned to modules which compose the system. We showthat if the system is coherent and if the components in eachmodule are In series, there Is a reliability maximizingassembly which is monotone, i.e., it has a single modulewhich gets the best parts of each type (according to Itsspecification), there is another module which gets thesecond best parts of each type (according to itsspecification), and so on, till finally, there is one modulewhich gets the worst parts of each type (according to itsspecification).
p

THE OPT(MftLITY* 6F CLUSTERIA/lci_
OPrTIMRL PFRr(1ioNS -#AVIN6;-
QA. PJnrFLL4r

OUTLE INE
PA1RTTIONING
o w %SU\J IRSoOJT OSTMAtW ?P~VTWMoS

CLASS(FICRTONJ AWL CLUQSTERIWN&o
PROSLEMS NRME TA FOLLOW3I4 STRQCTURFE:
PARRTITION Ft NUMER OF ENTITIES INTO
6 ROU K
ok E 9c4 ~TTty HARS SEYERL NUMiEdL
o ~ t~ PARTITIvON VsS I~t~~
C-F:XMPLES.' SThRICS - kAY'PoFS(s TESTJV~t
INheNrcky 6 ROMP I N (
~4lY;eY oF PAMs it4 R I~gC
LccTION% PRoBLEMS
comMON?RJ RcTnE - CLUX~IN6t
S 6,POU5 TO6ET~iER Er4TMTES ~~
SIMHiL Aj

?ARTI*UON(N6& FO%I.EIS - bECFIWITON.
Vd"(DISTINCT oECTORrivI
6-nORL IS To HNIMUZ
RZITMCE ?ota~u. Isi GVEN~ f~RmoR
UNRESTRkcTECD MLEIA (s UNR\\CTM

I
I
-
(- If
I - - - - = . ~. -
'I - -
(/
I --
/
L S ~

MAI1N TWEOWEtA
IS C JLLU WASI CONflE I
PN % IS Q Uf\S- CoICAVCRE IN ~ikV~PBE
Y\GTHEA >I TESTING
O'TCII OF EM1N
PART7Tlttj: ?PRTITIOtN INTO FR(CEPT VA
?,%b UtIEcT Vic) (MROUPS
gotC -V N! ?%. O 1LITY OF~ F IMT TYS't U teWl'
~ (j~ ~~PA 4 CZ( ~'~
EYzc E FA R

S GQS- COWScVE TH-EN TWE
RESTRICTETb ?ROLEM Mc-RW ~ OPTI!IRL ?RRYMTOM4
VJ(TH (lIIN ONVE2( VAJLLS
IFI S-ONCS\VC T IEN TAE
\)EKTRTEb PROBLEM~ AS RN O)?TIiFU. 'PRR71TION
*1 7ti S-SolNT Q-oNic HULL&

t~~)NTCON(C H~ULLC..

/ /p
p. - -. ~ - - C- -- -

7 K
/9Y
- -

CO~s I b FI THE' POLY~TOPC? INJ
IT v~?RoVEtb TFKAT T"AE 1ZTE1 otJ
C1~('P OLYTCPE CPof\F..?Nb TO
IF C> STRICTj,\ GOA1 C0O4CRNF4
E\IE'y cp~mhNL ?fRRT114F

COMPUTATIONAL Sl %NI'\CRNCE
T4E<E FRE" CLLZD CotE(UTIVE PI R'TITION
-- OF (oNsUTI'V" PRRTITIoN.-"
-.: ,.,t- CfNT CoN \c .kLS
U
° .

GRDER~ 'IKOR..SoTR
A ' c - -I -P)TI N Am

-J; oP RLL WFITlOMS
-* OF" 1RU ?WT~Toc-. I ?DENTjIi N
o cA.,),-rRJC'tulJkE' PR-TW ?OLY4Ot4I1L It
~Nt EFFICiFNT METh~bS FOR SYSTEMATic-
e NU VA ? foK M

AYPOTHE-..os TE-SINr6- RVISITEDO
iER
P... T"hFoe$ PC T"C Z(A4TE4CE IF O
%N ommk,~ PRRWfThoC(NR

L('/"NT1ON ?Ro$LEMS-ClKCL L 5L Kfi-t{1
SPPOSE ccloo AR ~TO BE PR11TIoWT\CT Sc fS S TO N(NINMIZE
&Ll1 ~~ L4ES'WCkl 1
PRkbt PPLY -THeCREMi

C. OkVCLUSow:
t 4 P~rT e NC NA PP4 OR SE1 R s, ANtj) S~
SUCH. 14RT
Z
~~C*IRCLE
oi y ,OAFo

OTIMFnLITY OF
NAot\DTolm FOR~\E
Co\Q 9:NT
* AAW

C? OE\T IVE/ JI oPC~fAMVE
SNR ~ES e S RU C-TUR E
R~ATRAZRY COREF IET '&TRUCTJf
"s E ON) sTT o'F
gNO RMUtNV VA 0lb X-

~ OF?PjRTS OF TYPE u EEt)Eb FORHODVLE' L
Pfl~§ (Y. c~?~R o TPEUFTF
-~~~~C G.-W yj
OP U
vTM M I

WiW
I;-I-, **~* -
-4.-
I f*l A 1* 1,** *\/-*

(T4MV\ Or MON~OTON E REN VS I E S
'O. FAQ SEP-L
7~~~EST TANY OPTNP
Vc t\ OTC .

LN ORIDIM, APPROACH TO CoNsmlsus VUNCTIONS
0 G. D. Crown and M. F. Janowitz
Abstract. Let G be a finite nonempty set. A consensus function
can be viewed as a mapping F:Gk - G. For n e Gk, F(n) is often
constructed from certain building blocks. For a family of
relations on a set X, these might be the pairs (xy) that
constitute the output relation. In its most general setting, one
can work with a triple (G,S,X) where S is the set of building
blocks and :G --)P(S) is a one-one function. A neutral consensus
function F is characterized by the existence of a family VF of
subsets of Vk = {1,2,...,k) having the property that for any k-
tuple n4 Gk, s e z(F(W)) if and only if {i: s e ' (gi)} DF-
Assuming that Vk e DF, and o * VF, we investigate conditions on
that are equivalent to: A e VF implies Vk\A E VF; A VF impliesVk\A e DF; VF is an order filter (principal filter, ultrafilter)
of Vk. The work is in progress, but here are some sample results:
Theorem. Assume G has elements g,h such that 7(g)vy(h) is not of
the form ,(v), while ?(g)c(h) - 7 (w) for some w e G. Than forany neutral F, it is true that A,B EDF implies AB *o.
(Included here would be any nondistributive lattice, as well as
any meet semilattice that is not a lattice). There are also some
general results that imply the following: If G is a lattice
having a pair of comparable sup-irreducibles, then DF is an order
filter of Vk. If G is an atomistic lattice having distinct atoms
a,b,c such that c s avb, then 2F is a principal filter (so any
neutral consensus method is an oligarchy). If G is an atomistic
join semilattice that is not a lattice having distinct atoms
a,b,c such that c s avb < 1, or if G is a nondistributive join
semilattice that is not a lattice having at least 4 atoms, such
that every line c-ntains exactly 2 points, then any neutral
consensus method is a dictatorship.
0

*ORDINAL CONSENSUS METHODS
G. D. Crown and M. F. Janowitz
(Preliminary Report)
What is a consensus method?
G = finite set of objects
(the objects to be summarized)
V = indexing set (the "voters")
(fixed, possibly infinite)
P = G = set of profiles.
Thus for R E P,
= (go) CEV or n:VH--G.
Consensus method: F:Pi -G.

Kon )ceT Rw.j,#- \J.,-Ue)
\Jjer- Or A A-V . -eL.'& FT'r- -c
~ Q~e-T
c,,- C oSeL- TejZc4..
6L-' oI-a r-j t 41C e

*For a profile n, will approach the
construction of F(n) by means of a'stability" family.
Pair (S,T), where S is a set and
: :Gi->P(S) is a one-one
mapping.
Neutral consensus method F:There is a family D = DF of
subsets of V such that
(i) o i D, but V E D.(ii) s E 7 (F (n)) if f s E 2),I
where s = {a: s E (n (a)}.
Goal: Relate properties of D with
properties of -.

* Examples of stability families
1. G = a set of binary relations
on a set X. (weak orders,
linear orders, partial orders,
quasiorders, etc.) S = XxX, and
(R)= {(x, y): xRy}
or
(R)= {(x, y): xRy fails}
2. G = finite join (or meet)
semilattice.
S = sup-irreducibles in that
a,b < s = avb < s.
T(g) = {s E S: s < g}, or
T(g) = {s E S: s $ g}.
(or the dual of this example)
3. Trees and Pyramids. X = set

with Ixi a: 5. A set 9 of
subsets of X is a trE-, if
(a) X E T, and 0 o i.
(b) {x} E 9T for all x E X.
(c) For A, B E T, AnB E {o,, A, B}
YTi s a pyramid i f (c) i s
replaced by
(d) For A,B E Y, AnB E T.
Take S = proper subsets of X,
and z (Y) = {A: A E Y} . There
are many similar examples.

) I~c~~ elA &zE cA %3 3
Cc-F-cr,- c44 c- 1 - 3 -T
Dho1 T,,4Ier i- V
9. A? ==:-P A~ n
~~r-Aur-c,i ( ~ A-&~s
(TT -r_

*Some Sample Results
F = neutral consensus method withF"
(S, -) is a stability family.
Theorem 1. If IVi a 2, (a) * (b)
(a) For any such F,
A E D implies A' i D.
(b) 3g,h E G such that y(g)uy(h)
is not of the form x'(v) for
any V E G.
I f I V 3, (c) * (d)
(c) For any such F,
B 4 D implies B' E D.
(d) There exist g, h E G such that
z(g) n (h) is not of the form
*Z(w) for any w E G.

~- -. (6~ SC) -4 t;I L .t(
\A-) it~d
(&bc, vc (b4Cj
(u-bL~ c-)

Theorem 2. If there exist g,h E G
such that
(g) uz (h) is not of the form (v) ,
but
(g) n (h)= y(w) for some w E G,
then AB E D implies AnB 0 o.
Corollary. Let G be any non-
distributive lattice, or any join
*semilattice that is not a lattice.
Take S = sup-irreducibles, and
T(g) = {s e S: s -< g}.
Then A, B E D implies AnB # 0.

-- A VERSION OF ARRow's THEOREM
a1 ,a2, a3 E S have the following
properties:
(1) 3glg 2 ,g3 E G I (i, j,k) any
permutation of (1,2,3), then
a. E y (g.) {a a k } n (gi) 0
(2) 3z E G 9 ui,(ai) _; z(z).
i (3) 3w E G 9 {al,a 2 ,a 3 }nz(w) = 0-.
(4) {a I ,a 2 , a 3 } is transitive in
the sense that a 1 ,a 2 E 'Y (g)
implies that a 3 E T(g).
Theorem 3. If the above conditions
are satisfied and F is a neutral
consensus method, then D is a
*- lattice filter of V.

Remark. The above notion of
transitivity of course comes from
transitivity of relations:
xRy, yRz implies xRz.
But what makes it of further
interest is the fact that in a
join semilattice, c -5 avb makes
(a,b,c) a transitive triple.
SFor relations, can talk about
a triple { (a,b) , (c,d) , (x,y)} being
transitive if
aRb,cRd implies xRy.
In general, if T _ S and S E S,
can define (T,s) to be transitive
if T _; T(g) implies s E 'Y(g)

Theorem 4. Let a, b E S; x, y, z E G.
Assume:
(1) a e (g) b e (g).
(2) a E (x).(3) a (y), b r= y(y).
(4) b (z).
Then F neutral implies ) an order
filter.
S Theorem 5. Assume x, y,g,z E G, and(1) (x)uT(y) # z (w)
(2) (x) nry(y) = 0.
(3) (x) uy (y) c x (g)
(4) -(z) = 0.
Then F neutral implies D is closed
under intersections.

Theorem 6. Assume x, y, g E G, and
(1) (x) uv (y) z (v) for any v.
(2) z(x)rnz(y) - (w) for some w.(3) y (x) ux (y) c y (g).
(4) D is an order filter.
Then D is a lattice filter.
Apply these and similar results to
lattices having more than 1
*member:
Theorem 7. G is a lattice, and
S = sup-irreducibles. These are
equivalent:
(1) G is not distributive.
(2) For any neutral F, ) is a
lattice filter.

Defn: A join-semilattice G is
distributive if every principal
filter of G is a distributive
lattice.
Theorem 8. G is a nondistributive
join semilattice not a lattice,
with S its sup-irreducibles.
For any neutral consensus method F
*on G, V is an ultrafilter.
In progress: Work with
distributive join-semilattices.
The setting: A stability
family (S, X) such that:
(1) x(a)u?-(b) = z(v).
(2) Y(a)nz(b) is either z(w) or 0.
Related Documents











