PiCopter V2 Flight Controler Manual de Usuario Stockrc.com PiCopter V2 FC Manual de Usuario Características principales: • V ersión avanzada de la controladora de vuelo diseñada para multicopteros !"#C$P!%" & 'U()"$C$P!%" & *%+(C$P!%" & $C!$C$P!%". • %sta,ilización giroscópica avanzada P#). • #ndicador ac-stico de ,atera ,a/a. • Cam,io de ganancias de giróscopos desde emisora. • Procesador de alta velocidad. • Señales ac-sticas de iniciación0 cali,rado 1 allos.3 • )etección de señal PPM 1 ailsae con corte gradual de motores. • Protección de seguridad si encendemos con palanca de motor arri,a. • Frecuencia de muestreo 4567*z. • )etección autom8tica de celdas en la ,atera 92S0:S05S; . • %ntrada PPM sum. • %sta,ilización do,le de c8mara 9tilt 1 ala,eo;0 con inversión 1 cali,ración con<gura,le desde la emisora. Conexiones: (riel =aravalle 3 Ma1o>27?? V er.2.? P8gina ?

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

7/25/2019 PiCopterV2 FC Sp FW2.1
http://slidepdf.com/reader/full/picopterv2-fc-sp-fw21 1/10
PiCopter V2 Flight Controler Manual de UsuarioStockrc.com
PiCopter V2 FC Manual de Usuario
Características principales:
• Versión avanzada de la controladora de vuelo diseñada paramulticopteros
!"#C$P!%" & 'U()"$C$P!%" & *%+(C$P!%" & $C!$C$P!%".• %sta,ilización giroscópica avanzada P#).• #ndicador ac-stico de ,atera ,a/a.• Cam,io de ganancias de giróscopos desde emisora.• Procesador de alta velocidad.• Señales ac-sticas de iniciación0 cali,rado 1 allos.3• )etección de señal PPM 1 ailsae con corte gradual de motores.• Protección de seguridad si encendemos con palanca de motor arri,a.• Frecuencia de muestreo 4567*z.• )etección autom8tica de celdas en la ,atera 92S0:S05S; .• %ntrada PPM sum.• %sta,ilización do,le de c8mara 9tilt 1 ala,eo;0 con inversión 1
cali,ración con<gura,le desde la emisora.
Conexiones:
(riel =aravalle 3 Ma1o>27?? Ver.2.? P8gina ?

7/25/2019 PiCopterV2 FC Sp FW2.1
http://slidepdf.com/reader/full/picopterv2-fc-sp-fw21 2/10
PiCopter V2 Flight Controler Manual de UsuarioStockrc.com
Indicaci
ón
Placa
Tricopt
er
+
Quadcopt
er
X
Quadcopte
r
X HexaOcto
Circ.
M ? M. #z@. M. #z@. M. #z@.>!ras. M5 MA
M 2 M. )er. M. )er.M.
)er.>)elan.MB M
M : M. !ras. M. !ras. M. )er.>!ras. MA MD
Serv Servo M. )elan.M.
#z@.>)elan.Servo(la,eo M2
Eed Servo Servo !ilt Servo !ilt Servo !ilt M?
(riel =aravalle 3 Ma1o>27?? Ver.2.? P8gina 2

7/25/2019 PiCopterV2 FC Sp FW2.1
http://slidepdf.com/reader/full/picopterv2-fc-sp-fw21 3/10
PiCopter V2 Flight Controler Manual de UsuarioStockrc.com
!iltCh2 3 3 3 M? M:Ch: 3 3 3 M2 M5Ch5 3 3 3 M: MB#CSP "eservado para PiCopter Pro.
Indicación en Placa Conexión al receptor R/CCh? Señal PPM sum 9desde el PPM %ncoder;
Indicación en
Placa
Conexión batería
=at Positivo de la =atera9no alimenta la FC0 solo controla elvolta/e;
Instrucciones de uso:
!ras la coneión de los A canales del receptor al GPPM %ncoderH 1 la salidade este a la placa seg-n indica el es@uema anterior0 procederemos a laconeión 1 veri<cación de los variadores 1 los motores respetando el ordenindicado.
#MP$"!(I!% Siempre realizar las compro,aciones sin colocar las hJlicespara evitar accidentes0 1 no colocarlas hasta estar totalmente seguros de@ue todo est8 uncionando 1 conectado correctamente.
ecuencia de Inicio de la !C " c#e$ueo de %onta&e:
!ras conectar la alimentación la FC emite unos pitidos inicialmente @ueindican el tipo de <rmKare 9ver ta,la; 1 luego realiza un che@ueo de todaslas partes vitales para el vuelo0 como la presencia de la correcta señalPPMsum en la entrada 9Ch?;.
Si detecta @ue est8 ausente o no es un tren de pulsos PPMsum v8lido0 segenera unos pitidos continuos 0 anulando todo tipo de señal a los motorespor seguridad. %sta alarma no se detendr8 hasta no detectar correctamente
la señal PPMsum.
Iota %s posi,le @ue en algunos receptores la señal tarde unos segundos enemitirse0 para ello se ha puesto un retardo en el inicio de la controladorapero puede @ue algunos necesiten m8s tiempo0 esto no es ning-npro,lema0 1a @ue la FC pitar8 la alta de pulsos un momento 1 luego aldetectarlos continuar8 normalmente.
(l <nalizar el che@ueo completo 1 la cali,ración de los giróscopos emite diezpitidos r8pidos0 indicando @ue est8 listo para volar. %s importante @ue hastaeste momento se de/en los mandos completamente @uietos 1 centrados0
ecepto el de motor @ue se de/a al mnimo0 para @ue haga la medición
(riel =aravalle 3 Ma1o>27?? Ver.2.? P8gina :

7/25/2019 PiCopterV2 FC Sp FW2.1
http://slidepdf.com/reader/full/picopterv2-fc-sp-fw21 4/10
PiCopter V2 Flight Controler Manual de UsuarioStockrc.com
correcta de los puntos centrales 9 la posición de los trim no es necesariotocarla;.
!ras los diez pitidos0 la placa est8 lista para armar motores0 lo cual loharemos con la palanca de elevador hacia arri,a 2 segundos0 %S#MP$"!(I!% 'U% %I %S!% M$M%I!$ %S!L C$MPE%!(M%I!% 'U#%!$0 ('U% C(E#="( E$S N#"OSC$P$S.
Ea indicación del armado de motores es un triple tono0 1 dos segundosdespuJs oiremos @ue los variadores se inician permitiendo 1a poder iniciarel vuelo.
Una compro,ación mu1 ,uena es aplicar el mnimo de motor 1 compro,ar@ue al mover alerones o elevador0 se aceleren los motores en el ordencorrecto0 al igual @ue podremos compro,ar si al mover el aparato los
motores tam,iJn se aceleran correctamente para contrarrestar elmovimiento @ue apli@uemos.
Ca%bio de 'anancias de (iróscopos:
Podemos modi<car r8pidamente 1 desde la emisora las ganancias de losgiróscopos para adaptar la respuesta del multicopter al tipo de vuelo @uedeseemos o ,ien al @ue me/or se adapte a nuestro con/unto chasis3motor3hJlice.
Se pueden con<gurar las ganancias de esta,ilidad horizontal
con/untamente 1 la del movimiento de gola por otro lado.Para esta,ilidad horizontal tenemos ?7 niveles secuenciales0 o sea @ue ir8naumentando hasta el ?7 1 luego pasa nuevamente al ?. #gualmente para laesta,ilización de cola pero en D niveles.
Eos cam,ios @uedan almacenados en la memoria 1 la PiCopter FC losrecordar8 inde<nidamente.
%l cam,io se realiza mediante la palanca de motor 1 timónindependientemente de @ue estJn armados los motores o no0 situando elmotor a mnimo 1 manteniendo la palanca hacia los lados hasta escucharlos pitidos @ue indicaran el nivel de ganancia a/ustado. Con palanca hacia#z@uierda cam,iaremos secuencialmente la ganancia del giro de timón 9(Q;1 hacia la derecha la de esta,ilización horizontal.
%n cada cam,io de ganancia se va a realizar autom8ticamente unacali,ración de los giróscopos0 por este motivo es indispensa,le de/ar elmulticopter totalmente @uieto 9sin importar la posición;.
Calibración de (iróscopos " reco%endaciones:
Eos giróscopos tienden a surir deriva con los cam,ios grandes detemperatura0 por lo cual recomendamos no sacarlo del coche o de casa a2:RC 1 salir a volar a BRC sin esperar a @ue la temperatura se esta,ilice en
(riel =aravalle 3 Ma1o>27?? Ver.2.? P8gina 5

7/25/2019 PiCopterV2 FC Sp FW2.1
http://slidepdf.com/reader/full/picopterv2-fc-sp-fw21 5/10
PiCopter V2 Flight Controler Manual de UsuarioStockrc.com
los giróscopos. Siempre es ,ueno de/arle unos minutos en la zona de vueloantes de conectar ,atera 1 despegar. %n los casos en @ue se utilice uncarenado o ca,ina hermJtica0 de,emos tener cuidado con las altastemperaturas @ue se puedan generar en verano0 1a @ue la ma1ora de
componentes electrónicos 9ecepto los de a,ricación militar; no garantizansu esta,ilidad a mas de DBRC.
)ariadores co%patibles:
ola%ente son co%patibles los *ariadores con T#rottle Ran(e
ettin(, o con-(uración del ran(o de %otor, ta%bin lla%ado
%anual endpoint, .
Io son compati,les los variadores con endpoint con<gura,le en cadaencendido0 como por e/emplo la serie Castle !hunder,ird.
Indicador ed:
%l indicador Eed sirve para varias unciones. Cuando estamos en modo vuelolistos para despegar 1 se reci,en correctamente los pulsos PPM lo indicahaciendo parpadeos lentos 1 constantes.
• Cuando estamos cam,iando la ganancia de los giróscopos nos indica /untamente con el ,eep el nivel de ganancia seleccionado.
• Cuando no se detecta señal PPM realiza /unto con el ,uzzer
parpadeos largos.• Cuando estamos por modi<car alg-n par8metro de con<guración o el
armado 1 desarmado de motores hace un parpadeo mu1 r8pido.
0etección de tipo de batería:
(l conectar ,atera el micro controlador hace una compro,ación de volta/e 1una auto detección de la cantidad de celdas0 lo cual lo indica con unos tonoslargos cu1a cantidad de tonos es igual a la de celdas detectadas0 al igual@ue lo hacen algunos variadores al iniciar.
#gualmente comprue,a @ue los valores ledos corresponden a niveles v8lidospara volar0 con lo cual si colocas una ,atera @ue no est8 con ,uena carga0dar8 un error haciendo ,eeps largos 1 continuos 1 no te de/ara volar.
!am,iJn realiza un c8lculo de los niveles de aviso de alarma 1 nos permitevolar con ,ateras de 2s0 :s 1 5S sin tener @ue con<gurar nada.
Celda
s
1i*eles *2lidos
9uera de estos volta/es dar8 error;
3lar%a
9%mpieza a pitar hasta @uedar continuo;
)esde *asta Pitidos Constante
(riel =aravalle 3 Ma1o>27?? Ver.2.? P8gina B

7/25/2019 PiCopterV2 FC Sp FW2.1
http://slidepdf.com/reader/full/picopterv2-fc-sp-fw21 6/10
PiCopter V2 Flight Controler Manual de UsuarioStockrc.com
4 .Av D.5v .2v A.2v
5 ??.5v ?2.Av ?7.Dv 6.:v
6 ?B.2v ?A.Dv ?5.5v ?2.5v
Iota !odos estos niveles tienen una tolerancia de B.
Un sistema de compro,ación del nivel de ,atera en tiempo real le indicaracuando se superen lmites prede<nidos para evitar dañar la ,atera o elmulticoptero.
Cuando la ,atera est8 por de,a/o del valor GPitidosH de la ta,la anterior0comienza a emitir unos pitidos cortos cu1a recuencia ir8 aumentandohasta llegar al valor GConstanteH de la ta,la0 en @ue el pitido ser8 constante1 nos indicar8 @ue estamos en un nivel peligroso para volar.
Podemos omitir la coneión del ca,le de ,atera a la placa 1 el sistemadetectar8 autom8ticamente @ue no est8 conectado 1 desha,ilitar8 elche@ueo de ,atera.9no recomendado 0 a no ser @ue utilice otro tipo deavisador para ,ateras;.
Compro,ación $pciones !iempo desde el inicio
9en segundos;
!ipo <rmKare
? ,eep !ricopter2 ,eep T @uad: ,eep + @uad
?,eep largo + hea? ,eep largo 1 ? cortoT hea? ,eep largo 1 2 corto
hea2 ,eep largos octocircular.
7
?
!ipo =ateria
? ,eep largo sinconeión0 sedesha,ilita lacompro,ación.20: 1 5 ,eeps celdasdetectadas.=eep continuos %rror o,atera no apta paravuelo.
2
B
Pulsos PPMsum=eep continuo sinseñal PPMsum
A
Niróscoos =eep continuo sinparar %rror en alg-n
D
(riel =aravalle 3 Ma1o>27?? Ver.2.? P8gina A

7/25/2019 PiCopterV2 FC Sp FW2.1
http://slidepdf.com/reader/full/picopterv2-fc-sp-fw21 7/10
PiCopter V2 Flight Controler Manual de UsuarioStockrc.com
giróscopo. 6
Memoriza la posicióncentrada delos sticks
#MP$"!(I!% de/arcentrados los mandos1 motor a cero
?7
Eisto para el armado ?7 ,eeps r8pidos ??
"ealizar armadomanual de motores
=eep de tres tonos.#MP$"!(I!% de/arest8tico 1a @ue realizala cali,ración degiróscopos al armarmotores.
?2
Eisto para volar
C#e$ueos Pre 7 89 )uelo:
(ntes de colocar las hJlices es importante compro,ar los siguientes puntos
Calibración del recorrido de la palanca de %otor:
)e,emos indicarle a nuestros variadores cual ser8 el recorrido depalanca @ue le vamos a enviar para @ue todos @ueden por igual 1 laesta,ilización uncione correctamente0 si o,viamos este pasoseguramente perderemos la esta,ilidad en pleno vuelo por @ue losmotores se pueden llegar a parar en vuelo.
%s necesario volver a memorizar el recorrido0 si realizamos alg-ncam,io importante en la emisora como los endpoint o )ual "ate.
Pasos a seguir
?. (segurarnos de @ue nuestros variadores tienen dicha cali,ración0suele aparecer en los manuales como G!hrottle "ange SettingH. Sino lo traen ser8n incompati,les con PiCopter.
2. 'uitar hJlices por seguridad.:. %ncender emisora 1 colocar el stick del motor al m8imo0 los
dem8s sticks centrados 0 todos los trims a cero 1 los )" todos al?77.3
5. Conectar ,atera en el multicopter 1 esperar a @ue empiece aemitir el ,eep de tono m8s grave 1 lento 9tam,iJn se apaga elled;0 indic8ndonos el error de @ue el motor no est8 a cero.
B. !ras escuchar dicho aviso ,a/amos la palanca a cero 1 el ledempieza a parpadear0 tras medio segundo escucharemos el tripletono de @ue la cali,ración de giróscopos 1 /usto en ese momentotendremos @ue su,ir el motor a tope lo m8s r8pido posi,le.
A. (hora los variadores indicaran todos /untos dos pitidos indicando@ue han reci,ido el nivel superior de palanca.
. !ras esos 2 pitidos ,a/amos toda la palanca de motor 1 luego los
variadores nos indicaran con : tonos @ue han reci,ido el nivelinerior 1 @ue ha @uedado almacenado.
(riel =aravalle 3 Ma1o>27?? Ver.2.? P8gina
7/25/2019 PiCopterV2 FC Sp FW2.1
http://slidepdf.com/reader/full/picopterv2-fc-sp-fw21 8/10
PiCopter V2 Flight Controler Manual de UsuarioStockrc.com
%ste proceso es necesario realizarlo solo la primera vez0 1a @ue sealmacena en los variadores inde<nidamente. Solo es necesariorepetirlo si cam,iamos alg-n variador o la con<guración de la
emisora.
i%ite de corte de los *ariadores:
Colocar la palanca de motor en el mnimo punto en el @ue los motoresencienden 1 realizar movimientos de alerón 1 elevador a tope0compro,ar @ue los motores no se detengan nunca0 solo tienen @ueaumentar de velocidad los del lado contrario al movimiento depalanca 9aler. 1 elev.;.
%n caso de @ue se detengan0 ha1 @ue realizar una cali,ración del
recorrido de la palanca de motor 1a @ue esto podra ocasionar paradade motores en vuelo ante movimientos etremos de palanca 1 laconsiguiente pJrdida de esta,ilidad.
Respuesta correcta de los (iróscopos:
Colocar la palanca de motor en el mnimo punto en el @ue los motoresencienden 1 mover el multicoptero lateralmente 1 longitudinalmente0compro,ando @ue solo el motor @ue desciende se acelera. !am,iJncompro,ar @ue no se detienen en ning-n momento si eso sucederealizar la cali,ración del recorrido de la palanca de motor
o*i%iento de c2%ara
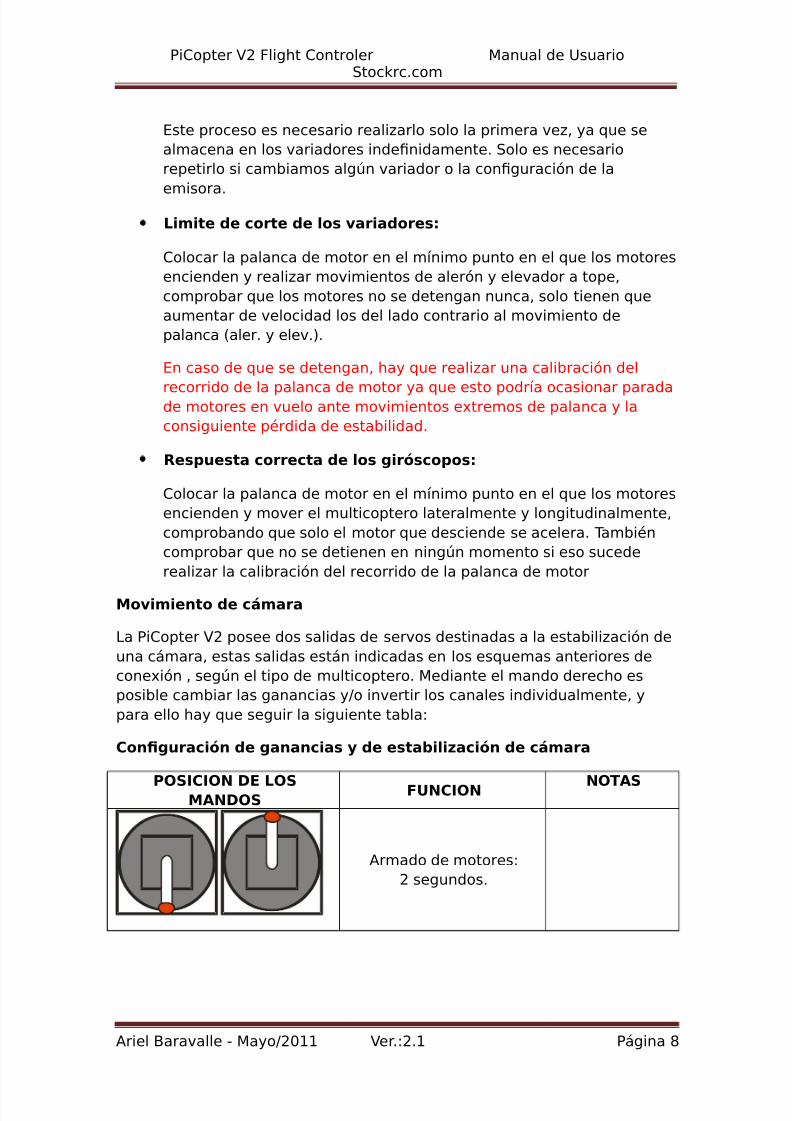
Ea PiCopter V2 posee dos salidas de servos destinadas a la esta,ilización deuna c8mara0 estas salidas est8n indicadas en los es@uemas anteriores deconeión 0 seg-n el tipo de multicoptero. Mediante el mando derecho esposi,le cam,iar las ganancias 1>o invertir los canales individualmente0 1para ello ha1 @ue seguir la siguiente ta,la
Con-(uración de (anancias " de estabili;ación de c2%ara
POICIO1 0< O310O
!=1CIO1 1OT3
(rmado de motores2 segundos.
(riel =aravalle 3 Ma1o>27?? Ver.2.? P8gina D
7/25/2019 PiCopterV2 FC Sp FW2.1
http://slidepdf.com/reader/full/picopterv2-fc-sp-fw21 9/10
PiCopter V2 Flight Controler Manual de UsuarioStockrc.com
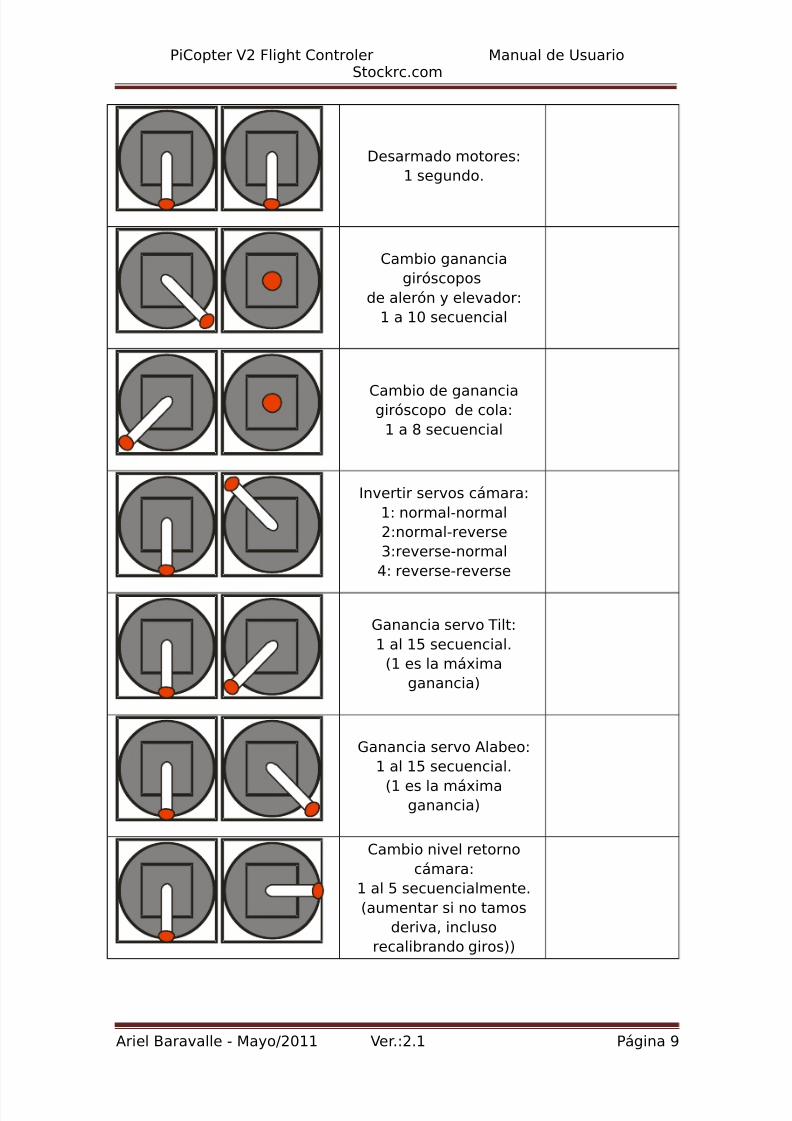
)esarmado motores? segundo.
Cam,io gananciagiróscopos
de alerón 1 elevador? a ?7 secuencial
Cam,io de gananciagiróscopo de cola
? a D secuencial
#nvertir servos c8mara? normal3normal2normal3reverse:reverse3normal5 reverse3reverse
Nanancia servo !ilt? al ?B secuencial.
9? es la m8imaganancia;
Nanancia servo (la,eo? al ?B secuencial.
9? es la m8imaganancia;
Cam,io nivel retornoc8mara
? al B secuencialmente.9aumentar si no tamos
deriva0 inclusorecali,rando giros;;
(riel =aravalle 3 Ma1o>27?? Ver.2.? P8gina 6

7/25/2019 PiCopterV2 FC Sp FW2.1
http://slidepdf.com/reader/full/picopterv2-fc-sp-fw21 10/10
PiCopter V2 Flight Controler Manual de UsuarioStockrc.com
Características Tcnicas:
)olta&e de
ali%entación
TBv 9alimentado desde los %SC o mediante =%C;
Consu%o B73?77m(<ntrada PPM sum 5 canales 9 A si utilizamos esta,ilización e
c8mara;Pulsos PP ?777ms 3 2777ms!recuencia de
%uestro
45D7*z
Ta%a>o ABB7?5mmPeso ?Bgr.
(riel =aravalle 3 Ma1o>27?? Ver.2.? P8gina ?7
Related Documents











