Optimizing Process Economic Performance Using Model Predictive Control James B. Rawlings and Rishi Amrit Department of Chemical and Biological Engineering University of Wisconsin–Madison International Workshop on Assessment and Future Directions of NMPC Pavia, Italy September 5, 2008 Rawlings and Amrit (UW) Economic MPC NMPC 2008 1 / 49

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Optimizing Process Economic Performance Using ModelPredictive Control
James B. Rawlings and Rishi Amrit
Department of Chemical and Biological EngineeringUniversity of Wisconsin–Madison
International Workshop on Assessment and Future Directions ofNMPC
Pavia, ItalySeptember 5, 2008
Rawlings and Amrit (UW) Economic MPC NMPC 2008 1 / 49

Outline
1 Historical overview and the current status
2 Tutorial example: unreachable setpoint MPC
3 Optimizing economic performance — linear dynamics
4 Turnpike theorems and nonlinear dynamics
5 Conclusions
Rawlings and Amrit (UW) Economic MPC NMPC 2008 2 / 49

The current hierarchical structure of plant operations
Validation
Planning and Scheduling
Reconciliation
Model UpdateOptimizationSteady State
Plant
Controller
Two layer structure
Steady-state layerI RTO optimizes steady state
modelI Optimal setpoints passed to
dynamic layer
Dynamic layerI Controller tracks the setpointsI Linear MPC
Rawlings and Amrit (UW) Economic MPC NMPC 2008 3 / 49

The current hierarchical structure of plant operations
Validation
Planning and Scheduling
Reconciliation
Model UpdateOptimizationSteady State
Plant
Controller
Two layer structure
Steady-state layerI RTO optimizes steady state
modelI Optimal setpoints passed to
dynamic layer
Dynamic layerI Controller tracks the setpointsI Linear MPC
Rawlings and Amrit (UW) Economic MPC NMPC 2008 3 / 49

The big(ger) picture — What is the goal?
The goal of optimal process operations is to maximize profit.— Helbig, Abel, and Marquardt (1998) . . . (−10 years)
Thus with more powerful capabilities, the determination ofsteady-state setpoints may simply become an unnecessaryintermediate calculation. Instead nonlinear, dynamic referencemodels could be used directly to optimize a profit objective.— Biegler and Rawlings (1991) . . . (−20 years)
In attempting to synthesize a feedback optimizing controlstructure, our main objective is to translate the economicobjective into process control objectives.— Morari, Arkun, and Stephanopoulos (1980) . . . (−30 years)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 4 / 49

The big(ger) picture — What is the goal?
The goal of optimal process operations is to maximize profit.
— Helbig, Abel, and Marquardt (1998) . . . (−10 years)
Thus with more powerful capabilities, the determination ofsteady-state setpoints may simply become an unnecessaryintermediate calculation. Instead nonlinear, dynamic referencemodels could be used directly to optimize a profit objective.— Biegler and Rawlings (1991) . . . (−20 years)
In attempting to synthesize a feedback optimizing controlstructure, our main objective is to translate the economicobjective into process control objectives.— Morari, Arkun, and Stephanopoulos (1980) . . . (−30 years)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 4 / 49

The big(ger) picture — What is the goal?
The goal of optimal process operations is to maximize profit.— Helbig, Abel, and Marquardt (1998)
. . . (−10 years)
Thus with more powerful capabilities, the determination ofsteady-state setpoints may simply become an unnecessaryintermediate calculation. Instead nonlinear, dynamic referencemodels could be used directly to optimize a profit objective.— Biegler and Rawlings (1991) . . . (−20 years)
In attempting to synthesize a feedback optimizing controlstructure, our main objective is to translate the economicobjective into process control objectives.— Morari, Arkun, and Stephanopoulos (1980) . . . (−30 years)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 4 / 49

The big(ger) picture — What is the goal?
The goal of optimal process operations is to maximize profit.— Helbig, Abel, and Marquardt (1998) . . . (−10 years)
Thus with more powerful capabilities, the determination ofsteady-state setpoints may simply become an unnecessaryintermediate calculation. Instead nonlinear, dynamic referencemodels could be used directly to optimize a profit objective.— Biegler and Rawlings (1991) . . . (−20 years)
In attempting to synthesize a feedback optimizing controlstructure, our main objective is to translate the economicobjective into process control objectives.— Morari, Arkun, and Stephanopoulos (1980) . . . (−30 years)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 4 / 49

The big(ger) picture — What is the goal?
The goal of optimal process operations is to maximize profit.— Helbig, Abel, and Marquardt (1998) . . . (−10 years)
Thus with more powerful capabilities, the determination ofsteady-state setpoints may simply become an unnecessaryintermediate calculation.
Instead nonlinear, dynamic referencemodels could be used directly to optimize a profit objective.— Biegler and Rawlings (1991) . . . (−20 years)
In attempting to synthesize a feedback optimizing controlstructure, our main objective is to translate the economicobjective into process control objectives.— Morari, Arkun, and Stephanopoulos (1980) . . . (−30 years)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 4 / 49

The big(ger) picture — What is the goal?
The goal of optimal process operations is to maximize profit.— Helbig, Abel, and Marquardt (1998) . . . (−10 years)
Thus with more powerful capabilities, the determination ofsteady-state setpoints may simply become an unnecessaryintermediate calculation. Instead nonlinear, dynamic referencemodels could be used directly to optimize a profit objective.
— Biegler and Rawlings (1991) . . . (−20 years)
In attempting to synthesize a feedback optimizing controlstructure, our main objective is to translate the economicobjective into process control objectives.— Morari, Arkun, and Stephanopoulos (1980) . . . (−30 years)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 4 / 49

The big(ger) picture — What is the goal?
The goal of optimal process operations is to maximize profit.— Helbig, Abel, and Marquardt (1998) . . . (−10 years)
Thus with more powerful capabilities, the determination ofsteady-state setpoints may simply become an unnecessaryintermediate calculation. Instead nonlinear, dynamic referencemodels could be used directly to optimize a profit objective.— Biegler and Rawlings (1991)
. . . (−20 years)
In attempting to synthesize a feedback optimizing controlstructure, our main objective is to translate the economicobjective into process control objectives.— Morari, Arkun, and Stephanopoulos (1980) . . . (−30 years)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 4 / 49
The big(ger) picture — What is the goal?
The goal of optimal process operations is to maximize profit.— Helbig, Abel, and Marquardt (1998) . . . (−10 years)
Thus with more powerful capabilities, the determination ofsteady-state setpoints may simply become an unnecessaryintermediate calculation. Instead nonlinear, dynamic referencemodels could be used directly to optimize a profit objective.— Biegler and Rawlings (1991) . . . (−20 years)
In attempting to synthesize a feedback optimizing controlstructure, our main objective is to translate the economicobjective into process control objectives.— Morari, Arkun, and Stephanopoulos (1980) . . . (−30 years)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 4 / 49

The big(ger) picture — What is the goal?
The goal of optimal process operations is to maximize profit.— Helbig, Abel, and Marquardt (1998) . . . (−10 years)
Thus with more powerful capabilities, the determination ofsteady-state setpoints may simply become an unnecessaryintermediate calculation. Instead nonlinear, dynamic referencemodels could be used directly to optimize a profit objective.— Biegler and Rawlings (1991) . . . (−20 years)
In attempting to synthesize a feedback optimizing controlstructure, our main objective is to translate the economicobjective into process control objectives.
— Morari, Arkun, and Stephanopoulos (1980) . . . (−30 years)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 4 / 49

The big(ger) picture — What is the goal?
The goal of optimal process operations is to maximize profit.— Helbig, Abel, and Marquardt (1998) . . . (−10 years)
Thus with more powerful capabilities, the determination ofsteady-state setpoints may simply become an unnecessaryintermediate calculation. Instead nonlinear, dynamic referencemodels could be used directly to optimize a profit objective.— Biegler and Rawlings (1991) . . . (−20 years)
In attempting to synthesize a feedback optimizing controlstructure, our main objective is to translate the economicobjective into process control objectives.— Morari, Arkun, and Stephanopoulos (1980)
. . . (−30 years)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 4 / 49

The big(ger) picture — What is the goal?
The goal of optimal process operations is to maximize profit.— Helbig, Abel, and Marquardt (1998) . . . (−10 years)
Thus with more powerful capabilities, the determination ofsteady-state setpoints may simply become an unnecessaryintermediate calculation. Instead nonlinear, dynamic referencemodels could be used directly to optimize a profit objective.— Biegler and Rawlings (1991) . . . (−20 years)
In attempting to synthesize a feedback optimizing controlstructure, our main objective is to translate the economicobjective into process control objectives.— Morari, Arkun, and Stephanopoulos (1980) . . . (−30 years)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 4 / 49

Other approaches and relevant research
Self-optimizing controlSkogestad (2000); Aske et al. (2008)
Extremum seeking controlKrstic and Wang (2000); Guay and Zhang (2003); Guay et al. (2003);DeHaan and Guay (2004)
Reviews and industrial case studiesEngell (2007); Zavala and Biegler (2008); Backx et al. (2000), Zaninet al. (2002); Rotava and Zanin (2005)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 5 / 49

Setpoints and unreachable setpoints
Consider the steady state of a dynamic model with state x , controlledinput u, and disturbance w
x(k + 1) = Ax(k) + Bu(k) + Bdw(k)
xs = (I − A)−1B︸ ︷︷ ︸G
us + (I − A)−1Bdws︸ ︷︷ ︸ds
xs = Gus + ds
Rawlings and Amrit (UW) Economic MPC NMPC 2008 6 / 49

Setpoints and unreachable setpoints
Consider the steady state of a dynamic model with state x , controlledinput u, and disturbance w
x(k + 1) = Ax(k) + Bu(k) + Bdw(k)
xs = (I − A)−1B︸ ︷︷ ︸G
us + (I − A)−1Bdws︸ ︷︷ ︸ds
xs = Gus + ds
Rawlings and Amrit (UW) Economic MPC NMPC 2008 6 / 49

Setpoints and unreachable setpoints
Consider the steady state of a dynamic model with state x , controlledinput u, and disturbance w
x(k + 1) = Ax(k) + Bu(k) + Bdw(k)
xs = (I − A)−1B︸ ︷︷ ︸G
us + (I − A)−1Bdws︸ ︷︷ ︸ds
xs = Gus + ds
Rawlings and Amrit (UW) Economic MPC NMPC 2008 6 / 49

Steady states — unconstrained system
xs
ds2 = 0
ds1 = 1
xs = Gus + ds
ds3 = −1Gxsp
us2 us3us1
us
For an unconstrained system with G 6= 0, any setpoint xsp with anydisturbance ds has a corresponding us .
Rawlings and Amrit (UW) Economic MPC NMPC 2008 7 / 49

Constraints and unreachable setpoints
xs
ds2 = 0
ds1 = 1
xs = Gus + ds
ds3 = −1Gxsp
us1usus2
us3
0 1
0 ≤ us ≤ 1
For a constrained system, the setpoint xsp may be unreachable for a givendisturbance ds . MPC is method of choice for this situation.
Rawlings and Amrit (UW) Economic MPC NMPC 2008 8 / 49

Constraints and unreachable setpoints
xs
xsp
us
0
0 ≤ ds ≤ G
0 ≤ us ≤ 1
xs = Gus + ds
ds ≤ 0
1
ds ≥ G
As the estimated disturbance changes with time, the setpoint may changebetween reachable and unreachable.
Rawlings and Amrit (UW) Economic MPC NMPC 2008 9 / 49

Steady-state problem definition
Stage cost:
L(x , u) = |x − xsp|2Q + |u − usp|2R Q,R > 0
Optimization: minu
L(x , u)
subject to: x = Ax + Bu u ∈ USolution: (x∗, u∗)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 10 / 49

Steady-state problem definition
Stage cost:
L(x , u) = |x − xsp|2Q + |u − usp|2R Q,R > 0
Optimization: minu
L(x , u)
subject to: x = Ax + Bu u ∈ U
Solution: (x∗, u∗)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 10 / 49
Steady-state problem definition
Stage cost:
L(x , u) = |x − xsp|2Q + |u − usp|2R Q,R > 0
Optimization: minu
L(x , u)
subject to: x = Ax + Bu u ∈ USolution: (x∗, u∗)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 10 / 49

MPC problem definition — dynamic case
Cost function: V =N−1∑j=0
L(x(j), u(j))
Optimization: minu
V (u, x(0))
subject to:x+ = Ax + Bu u = {u(0), u(1), . . . u(N − 1)} u ∈ UStage cost:
targ–MPC: L(x , u) = |x − x∗|2Q + |u − u∗|2R –or–
sp–MPC: L(x , u) = |x − xsp|2Q + |u − usp|2R
Control law: u0(x) = u0(0, x)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 11 / 49

MPC problem definition — dynamic case
Cost function: V =N−1∑j=0
L(x(j), u(j))
Optimization: minu
V (u, x(0))
subject to:x+ = Ax + Bu u = {u(0), u(1), . . . u(N − 1)} u ∈ U
Stage cost:
targ–MPC: L(x , u) = |x − x∗|2Q + |u − u∗|2R –or–
sp–MPC: L(x , u) = |x − xsp|2Q + |u − usp|2R
Control law: u0(x) = u0(0, x)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 11 / 49
MPC problem definition — dynamic case
Cost function: V =N−1∑j=0
L(x(j), u(j))
Optimization: minu
V (u, x(0))
subject to:x+ = Ax + Bu u = {u(0), u(1), . . . u(N − 1)} u ∈ UStage cost:
targ–MPC: L(x , u) = |x − x∗|2Q + |u − u∗|2R –or–
sp–MPC: L(x , u) = |x − xsp|2Q + |u − usp|2R
Control law: u0(x) = u0(0, x)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 11 / 49
MPC problem definition — dynamic case
Cost function: V =N−1∑j=0
L(x(j), u(j))
Optimization: minu
V (u, x(0))
subject to:x+ = Ax + Bu u = {u(0), u(1), . . . u(N − 1)} u ∈ UStage cost:
targ–MPC: L(x , u) = |x − x∗|2Q + |u − u∗|2R –or–
sp–MPC: L(x , u) = |x − xsp|2Q + |u − usp|2R
Control law: u0(x) = u0(0, x)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 11 / 49

What closed-loop behavior is desirable? Fast tracking
xsp
x∗x
k
x(0)
x(0)Q � R (fast tracking)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 12 / 49

What closed-loop behavior is desirable? Slow tracking
xsp
x∗x
k
x(0)Q � R (slow tracking)
x(0)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 13 / 49
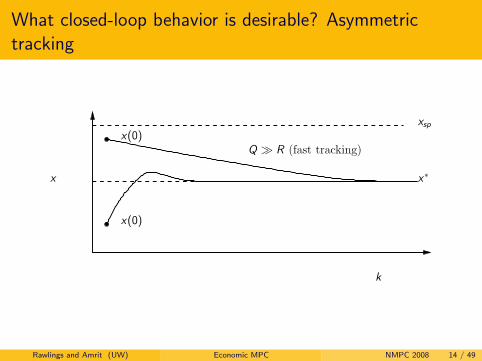
What closed-loop behavior is desirable? Asymmetrictracking
xsp
x∗x
k
x(0)Q � R (fast tracking)
x(0)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 14 / 49
Why analysis? Unexpected closed-loop behavior
A finite horizon objective function may not give a stable controller!
How is this possible?
x1
x2
0
k
x1
x2
0
k
k + 1
x1
x2
0
k
k + 1
k + 2
x1
x2
0
k
k + 1
k + 2
closed-loop trajectory
Rawlings and Amrit (UW) Economic MPC NMPC 2008 15 / 49

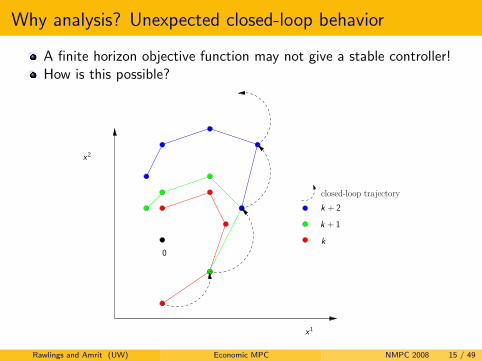
Why analysis? Unexpected closed-loop behavior
A finite horizon objective function may not give a stable controller!How is this possible?
x1
x2
0
k
x1
x2
0
k
k + 1
x1
x2
0
k
k + 1
k + 2
x1
x2
0
k
k + 1
k + 2
closed-loop trajectory
Rawlings and Amrit (UW) Economic MPC NMPC 2008 15 / 49

Why analysis? Unexpected closed-loop behavior
A finite horizon objective function may not give a stable controller!How is this possible?
x1
x2
0
k
x1
x2
0
k
k + 1
x1
x2
0
k
k + 1
k + 2
x1
x2
0
k
k + 1
k + 2
closed-loop trajectory
Rawlings and Amrit (UW) Economic MPC NMPC 2008 15 / 49

Why analysis? Unexpected closed-loop behavior
A finite horizon objective function may not give a stable controller!How is this possible?
x1
x2
0
k
x1
x2
0
k
k + 1
x1
x2
0
k
k + 1
k + 2
x1
x2
0
k
k + 1
k + 2
closed-loop trajectory
Rawlings and Amrit (UW) Economic MPC NMPC 2008 15 / 49

Why analysis? Unexpected closed-loop behavior
A finite horizon objective function may not give a stable controller!How is this possible?
x1
x2
0
k
x1
x2
0
k
k + 1
x1
x2
0
k
k + 1
k + 2
x1
x2
0
k
k + 1
k + 2
closed-loop trajectory
Rawlings and Amrit (UW) Economic MPC NMPC 2008 15 / 49
Why analysis? Unexpected closed-loop behavior
A finite horizon objective function may not give a stable controller!How is this possible?
x1
x2
0
k
x1
x2
0
k
k + 1
x1
x2
0
k
k + 1
k + 2
x1
x2
0
k
k + 1
k + 2
closed-loop trajectory
Rawlings and Amrit (UW) Economic MPC NMPC 2008 15 / 49

Terminal constraint solution
Adding a terminal constraint ensures stability
May cause infeasibilityOpen-loop predictions not equal to closed-loop behavior
0
k
Φk
x1
x2
0
k
Φk
x1
x2
Vk+1 ≤ Vk − L(xk , uk)
k + 1
0
k
Φk
x1
x2
Vk+1 ≤ Vk − L(xk , uk)
k + 1
k + 2
Vk+2 ≤ Vk+1 − L(xk+1, uk+1)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 16 / 49

Terminal constraint solution
Adding a terminal constraint ensures stabilityMay cause infeasibility
Open-loop predictions not equal to closed-loop behavior
0
k
Φk
x1
x2
0
k
Φk
x1
x2
Vk+1 ≤ Vk − L(xk , uk)
k + 1
0
k
Φk
x1
x2
Vk+1 ≤ Vk − L(xk , uk)
k + 1
k + 2
Vk+2 ≤ Vk+1 − L(xk+1, uk+1)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 16 / 49

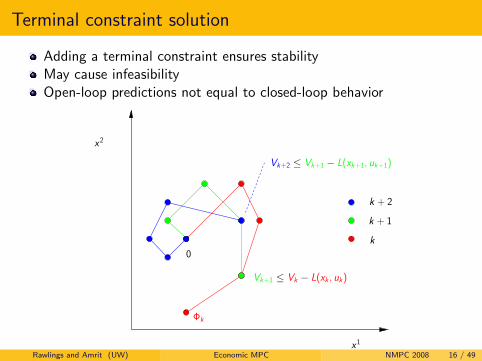
Terminal constraint solution
Adding a terminal constraint ensures stabilityMay cause infeasibilityOpen-loop predictions not equal to closed-loop behavior
0
k
Φk
x1
x2
0
k
Φk
x1
x2
Vk+1 ≤ Vk − L(xk , uk)
k + 1
0
k
Φk
x1
x2
Vk+1 ≤ Vk − L(xk , uk)
k + 1
k + 2
Vk+2 ≤ Vk+1 − L(xk+1, uk+1)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 16 / 49

Terminal constraint solution
Adding a terminal constraint ensures stabilityMay cause infeasibilityOpen-loop predictions not equal to closed-loop behavior
0
k
Φk
x1
x2
0
k
Φk
x1
x2
Vk+1 ≤ Vk − L(xk , uk)
k + 1
0
k
Φk
x1
x2
Vk+1 ≤ Vk − L(xk , uk)
k + 1
k + 2
Vk+2 ≤ Vk+1 − L(xk+1, uk+1)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 16 / 49
Terminal constraint solution
Adding a terminal constraint ensures stabilityMay cause infeasibilityOpen-loop predictions not equal to closed-loop behavior
0
k
Φk
x1
x2
0
k
Φk
x1
x2
Vk+1 ≤ Vk − L(xk , uk)
k + 1
0
k
Φk
x1
x2
Vk+1 ≤ Vk − L(xk , uk)
k + 1
k + 2
Vk+2 ≤ Vk+1 − L(xk+1, uk+1)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 16 / 49
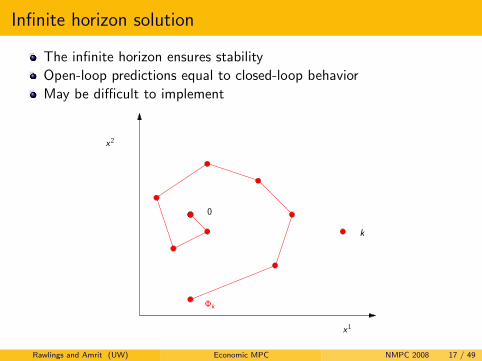
Infinite horizon solution
The infinite horizon ensures stability
Open-loop predictions equal to closed-loop behavior
May be difficult to implement
x1
x2
0
Φk
k
x1
x2
0
Φk
k
k + 1
Vk+1 = Vk − L(xk , uk)
x1
x2
0
Φk
k
k + 1
Vk+1 = Vk − L(xk , uk)
k + 2
Vk+2 = Vk+1 − L(xk+1, uk+1)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 17 / 49

Infinite horizon solution
The infinite horizon ensures stability
Open-loop predictions equal to closed-loop behavior
May be difficult to implement
x1
x2
0
Φk
k
x1
x2
0
Φk
k
k + 1
Vk+1 = Vk − L(xk , uk)
x1
x2
0
Φk
k
k + 1
Vk+1 = Vk − L(xk , uk)
k + 2
Vk+2 = Vk+1 − L(xk+1, uk+1)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 17 / 49
Infinite horizon solution
The infinite horizon ensures stability
Open-loop predictions equal to closed-loop behavior
May be difficult to implement
x1
x2
0
Φk
k
x1
x2
0
Φk
k
k + 1
Vk+1 = Vk − L(xk , uk)
x1
x2
0
Φk
k
k + 1
Vk+1 = Vk − L(xk , uk)
k + 2
Vk+2 = Vk+1 − L(xk+1, uk+1)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 17 / 49

Infinite horizon solution
The infinite horizon ensures stability
Open-loop predictions equal to closed-loop behavior
May be difficult to implement
x1
x2
0
Φk
k
x1
x2
0
Φk
k
k + 1
Vk+1 = Vk − L(xk , uk)
x1
x2
0
Φk
k
k + 1
Vk+1 = Vk − L(xk , uk)
k + 2
Vk+2 = Vk+1 − L(xk+1, uk+1)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 17 / 49

Infinite horizon solution
The infinite horizon ensures stability
Open-loop predictions equal to closed-loop behavior
May be difficult to implement
x1
x2
0
Φk
k
x1
x2
0
Φk
k
k + 1
Vk+1 = Vk − L(xk , uk)
x1
x2
0
Φk
k
k + 1
Vk+1 = Vk − L(xk , uk)
k + 2
Vk+2 = Vk+1 − L(xk+1, uk+1)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 17 / 49

Unreachable case — challenges for analyzing closed-loopbehavior
Sequence of optimal costs is not monotone decreasing
Infinite horizon cost is unbounded for all input sequences
Optimal cost is not a Lyapunov function for the closed-loop system
Standard nominal MPC stability arguments do not apply
Simulations indicate the closed loop is stable
How can we be sure?
Rawlings and Amrit (UW) Economic MPC NMPC 2008 18 / 49

Unreachable case — challenges for analyzing closed-loopbehavior
Sequence of optimal costs is not monotone decreasing
Infinite horizon cost is unbounded for all input sequences
Optimal cost is not a Lyapunov function for the closed-loop system
Standard nominal MPC stability arguments do not apply
Simulations indicate the closed loop is stable
How can we be sure?
Rawlings and Amrit (UW) Economic MPC NMPC 2008 18 / 49

Unreachable case — challenges for analyzing closed-loopbehavior
Sequence of optimal costs is not monotone decreasing
Infinite horizon cost is unbounded for all input sequences
Optimal cost is not a Lyapunov function for the closed-loop system
Standard nominal MPC stability arguments do not apply
Simulations indicate the closed loop is stable
How can we be sure?
Rawlings and Amrit (UW) Economic MPC NMPC 2008 18 / 49

Unreachable case — challenges for analyzing closed-loopbehavior
Sequence of optimal costs is not monotone decreasing
Infinite horizon cost is unbounded for all input sequences
Optimal cost is not a Lyapunov function for the closed-loop system
Standard nominal MPC stability arguments do not apply
Simulations indicate the closed loop is stable
How can we be sure?
Rawlings and Amrit (UW) Economic MPC NMPC 2008 18 / 49

Unreachable case — challenges for analyzing closed-loopbehavior
Sequence of optimal costs is not monotone decreasing
Infinite horizon cost is unbounded for all input sequences
Optimal cost is not a Lyapunov function for the closed-loop system
Standard nominal MPC stability arguments do not apply
Simulations indicate the closed loop is stable
How can we be sure?
Rawlings and Amrit (UW) Economic MPC NMPC 2008 18 / 49
Unreachable case — challenges for analyzing closed-loopbehavior
Sequence of optimal costs is not monotone decreasing
Infinite horizon cost is unbounded for all input sequences
Optimal cost is not a Lyapunov function for the closed-loop system
Standard nominal MPC stability arguments do not apply
Simulations indicate the closed loop is stable
How can we be sure?
Rawlings and Amrit (UW) Economic MPC NMPC 2008 18 / 49

Unreachable case — theoretical result
Theorem (Asymptotic Stability of Terminal Constraint MPC)
The optimal steady state is the asymptotically stable solution of theclosed-loop system under terminal constraint MPC. Its region of attractionis the steerable set.
(Rawlings, Bonne, Jørgensen, Venkat, and Jørgensen, 2008)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 19 / 49

Example 1. Single input–single output system
G (s) =−0.2623
60s2 + 59.2s + 1
Sample time T = 10 sec
Input constraint, −1 ≤ u ≤ 1
Setpoint ysp = 0.25
Qy = 10,R = 0, S = 1,Q = C ′Qy C + 0.01I2
Horizon length N = 80
Periodic state disturbance dx = [17.1 1.77]′ which is estimated fromthe measurements
Rawlings and Amrit (UW) Economic MPC NMPC 2008 20 / 49

Disturbance estimation
As the estimated disturbance changes with time, the setpoint changesbetween reachable and unreachable.
xs
xsp
us
0
0 ≤ ds ≤ G
ds ≤ 0
1
ds ≥ G
0 ≤ us ≤ 1
xsp
k0
d(k)
x∗(k)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 21 / 49

Disturbance estimation
As the estimated disturbance changes with time, the setpoint changesbetween reachable and unreachable.
xs
xsp
us
0
0 ≤ ds ≤ G
ds ≤ 0
1
ds ≥ G
0 ≤ us ≤ 1
xsp
k0
d(k)
x∗(k)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 21 / 49

-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0 50 100 150 200 250 300 350 400Time (sec)
y
setpointtarget (y ∗)
y(sp-MPC)y(targ-MPC)
-1
-0.5
0
0.5
1
0 50 100 150 200 250 300 350 400Time (sec)
u
target (u∗)u(sp-MPC)
u(targ-MPC)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 22 / 49

Summary of Example 1
Performance targ-MPC sp-MPC ∆(index)%Measure
Vu 0.016 2.2× 10−6 99.98Vy 3.65 1.71 53V 3.67 1.71 54
Rawlings and Amrit (UW) Economic MPC NMPC 2008 23 / 49
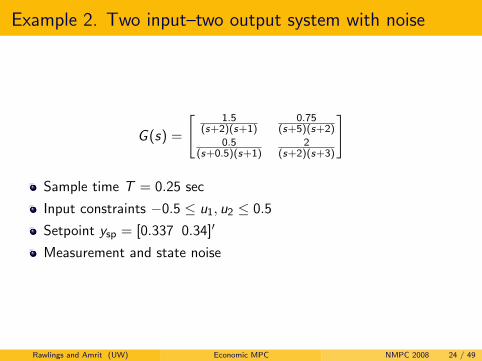
Example 2. Two input–two output system with noise
G (s) =
[1.5
(s+2)(s+1)0.75
(s+5)(s+2)
0.5(s+0.5)(s+1)
2(s+2)(s+3)
]
Sample time T = 0.25 sec
Input constraints −0.5 ≤ u1, u2 ≤ 0.5
Setpoint ysp = [0.337 0.34]′
Measurement and state noise
Rawlings and Amrit (UW) Economic MPC NMPC 2008 24 / 49

0.29
0.295
0.3
0.305
0.31
0.315
0.32
0.325
0.33
0.335
0.34
0 5 10 15 20 25Time (sec)
y1
setpointy1(sp-MPC)
y1(targ-MPC)
0.31
0.315
0.32
0.325
0.33
0.335
0.34
0.345
0 5 10 15 20 25Time (sec)
y2
setpointy2(sp-MPC)
y2(targ-MPC)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 25 / 49

0.4
0.5
0 5 10 15 20 25
0.4
0.5
Time (sec)
u1
u1
u1(targ-MPC)u1(sp-MPC)
-0.48
-0.46
-0.44
0 5 10 15 20 25
-0.48
-0.46
-0.44
Time (sec)
u2
u2
u2(targ-MPC)u2(sp-MPC)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 26 / 49

-0.1
0
0.1
0.2
0.3
0 5 10 15 20 25Time (sec)
y ∗1
d1
setpoint
target (y ∗1 )
d1
0
0.1
0.2
0.3
0 5 10 15 20 25Time (sec)
y ∗2
d2
setpoint
target (y ∗2 )
d2
Rawlings and Amrit (UW) Economic MPC NMPC 2008 27 / 49

Summary of Example 2
Performance targ-MPC sp-MPC ∆(index)%Measure (×10−3) (×10−3)
Vu 1.32 1.24 6.1Vy 4.4 0.48 89V 5.72 1.72 70
Rawlings and Amrit (UW) Economic MPC NMPC 2008 28 / 49

Optimizing economics: Current industrial practice
Validation
Planning and Scheduling
Reconciliation
Model UpdateOptimizationSteady State
Plant
Controller
Two layer structure
Drawbacks
I Inconsistent modelsI Re-identify linear model as
setpoint changesI Time scale separation may not
holdI Economics unavailable in
dynamic layer
Rawlings and Amrit (UW) Economic MPC NMPC 2008 29 / 49

Optimizing economics: Current industrial practice
Validation
Planning and Scheduling
Reconciliation
Model UpdateOptimizationSteady State
Plant
Controller
Two layer structure
DrawbacksI Inconsistent modelsI Re-identify linear model as
setpoint changesI Time scale separation may not
holdI Economics unavailable in
dynamic layer
Rawlings and Amrit (UW) Economic MPC NMPC 2008 29 / 49

Motivating the idea
-4 -2 0 2 4-4
-20
24
Profit
Input (u)
State (x)
Profit
-4 -2 0 2 4-4
-20
24
Profit
Input (u)
State (x)
Profit
Rawlings and Amrit (UW) Economic MPC NMPC 2008 30 / 49

Motivating the idea
-4 -2 0 2 4-4
-20
24
Profit
Input (u)
State (x)
Profit
-4 -2 0 2 4-4
-20
24
Profit
Input (u)
State (x)
Profit
Rawlings and Amrit (UW) Economic MPC NMPC 2008 30 / 49
Economics controller
Stage cost:eco–MPC: L(x , u) = any strictly convex function
Cost function: V =N−1∑j=0
L(x(j), u(j))
Optimization: minu
V (u, x(0))
subject to:x+ = Ax + Bu u = {u(0), u(1), . . . u(N − 1)} u ∈ UControl law: u0(x) = u0(0, x)
Asymptotic stability: (x(k), u(k)) −→ (xe , ue), the optimal economicsteady state for the chosen L(x , u).Requires terminal constraint, terminal controller, or infinite horizon.
Rawlings and Amrit (UW) Economic MPC NMPC 2008 31 / 49

Economics controller
Stage cost:eco–MPC: L(x , u) = any strictly convex function
Cost function: V =N−1∑j=0
L(x(j), u(j))
Optimization: minu
V (u, x(0))
subject to:x+ = Ax + Bu u = {u(0), u(1), . . . u(N − 1)} u ∈ UControl law: u0(x) = u0(0, x)
Asymptotic stability: (x(k), u(k)) −→ (xe , ue), the optimal economicsteady state for the chosen L(x , u).Requires terminal constraint, terminal controller, or infinite horizon.
Rawlings and Amrit (UW) Economic MPC NMPC 2008 31 / 49
Economics controller
Stage cost:eco–MPC: L(x , u) = any strictly convex function
Cost function: V =N−1∑j=0
L(x(j), u(j))
Optimization: minu
V (u, x(0))
subject to:x+ = Ax + Bu u = {u(0), u(1), . . . u(N − 1)} u ∈ U
Control law: u0(x) = u0(0, x)
Asymptotic stability: (x(k), u(k)) −→ (xe , ue), the optimal economicsteady state for the chosen L(x , u).Requires terminal constraint, terminal controller, or infinite horizon.
Rawlings and Amrit (UW) Economic MPC NMPC 2008 31 / 49

Economics controller
Stage cost:eco–MPC: L(x , u) = any strictly convex function
Cost function: V =N−1∑j=0
L(x(j), u(j))
Optimization: minu
V (u, x(0))
subject to:x+ = Ax + Bu u = {u(0), u(1), . . . u(N − 1)} u ∈ UControl law: u0(x) = u0(0, x)
Asymptotic stability: (x(k), u(k)) −→ (xe , ue), the optimal economicsteady state for the chosen L(x , u).Requires terminal constraint, terminal controller, or infinite horizon.
Rawlings and Amrit (UW) Economic MPC NMPC 2008 31 / 49
Economics controller
Stage cost:eco–MPC: L(x , u) = any strictly convex function
Cost function: V =N−1∑j=0
L(x(j), u(j))
Optimization: minu
V (u, x(0))
subject to:x+ = Ax + Bu u = {u(0), u(1), . . . u(N − 1)} u ∈ UControl law: u0(x) = u0(0, x)
Asymptotic stability: (x(k), u(k)) −→ (xe , ue), the optimal economicsteady state for the chosen L(x , u).
Requires terminal constraint, terminal controller, or infinite horizon.
Rawlings and Amrit (UW) Economic MPC NMPC 2008 31 / 49
Economics controller
Stage cost:eco–MPC: L(x , u) = any strictly convex function
Cost function: V =N−1∑j=0
L(x(j), u(j))
Optimization: minu
V (u, x(0))
subject to:x+ = Ax + Bu u = {u(0), u(1), . . . u(N − 1)} u ∈ UControl law: u0(x) = u0(0, x)
Asymptotic stability: (x(k), u(k)) −→ (xe , ue), the optimal economicsteady state for the chosen L(x , u).Requires terminal constraint, terminal controller, or infinite horizon.
Rawlings and Amrit (UW) Economic MPC NMPC 2008 31 / 49

Example
xk+1 =
[0.857 0.884−0.0147 −0.0151
]xk +
[8.565
0.88418
]uk
Input constraint: −1 ≤ u ≤ 1
Leco = α′x + β′u
α =[−3 −2
]′β = −2
Ltarg = |x − x∗|2Q + |u − u∗|2RQ = 2I2 R = 2
x∗ =[60 0
]′u∗ = 1
Rawlings and Amrit (UW) Economic MPC NMPC 2008 32 / 49

targ-MPCtarg-MPC60 65 70 75 80 85
x1
-2
0
2
4
6
8
10
x 2
targ-MPC eco-MPCtarg-MPC eco-MPC60 65 70 75 80 85
x1
-2
0
2
4
6
8
10
x 2
Rawlings and Amrit (UW) Economic MPC NMPC 2008 33 / 49

targ-MPCtarg-MPC60 65 70 75 80 85
x1
-2
0
2
4
6
8
10
x 2
targ-MPC eco-MPCtarg-MPC eco-MPC60 65 70 75 80 85
x1
-2
0
2
4
6
8
10
x 2
Rawlings and Amrit (UW) Economic MPC NMPC 2008 33 / 49
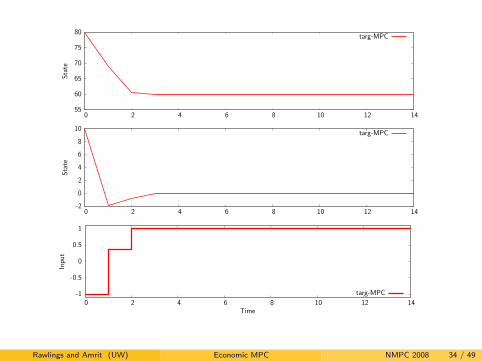
55
60
65
70
75
80
0 2 4 6 8 10 12 14
Sta
te
targ-MPC
-2
0
2
4
6
8
10
0 2 4 6 8 10 12 14
Sta
te
targ-MPC
-1
-0.5
0
0.5
1
0 2 4 6 8 10 12 14
Inpu
t
Time
targ-MPC
Rawlings and Amrit (UW) Economic MPC NMPC 2008 34 / 49
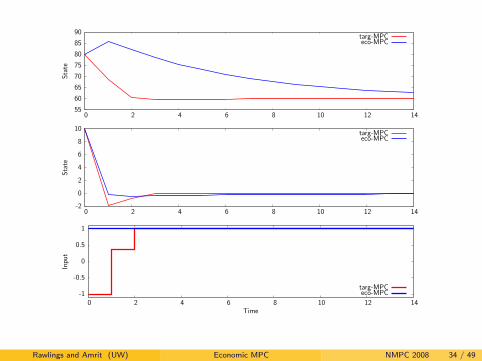
55
60
65
70
75
80
85
90
0 2 4 6 8 10 12 14
Sta
te
targ-MPCeco-MPC
-2
0
2
4
6
8
10
0 2 4 6 8 10 12 14
Sta
te
targ-MPCeco-MPC
-1
-0.5
0
0.5
1
0 2 4 6 8 10 12 14
Inpu
t
Time
targ-MPCeco-MPC
Rawlings and Amrit (UW) Economic MPC NMPC 2008 34 / 49

Introduction to Turnpike Theorems
It is exactly like a turnpike paralleled by a network of minor roads.
There is a fastest route between any two points; and if the originand destination are close together and far from the turnpike, thebest route may not touch the turnpike.
But if the origin and destination are far enough apart, it willalways pay to get on the turnpike and cover distance at the bestrate of travel, even if this means adding a little mileage at eitherend.
—Dorfman, Samuelson, and Solow (1958, p.331)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 35 / 49

Introduction to Turnpike Theorems
It is exactly like a turnpike paralleled by a network of minor roads.
There is a fastest route between any two points; and if the originand destination are close together and far from the turnpike, thebest route may not touch the turnpike.
But if the origin and destination are far enough apart, it willalways pay to get on the turnpike and cover distance at the bestrate of travel, even if this means adding a little mileage at eitherend.
—Dorfman, Samuelson, and Solow (1958, p.331)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 35 / 49
Introduction to Turnpike Theorems
It is exactly like a turnpike paralleled by a network of minor roads.
There is a fastest route between any two points; and if the originand destination are close together and far from the turnpike, thebest route may not touch the turnpike.
But if the origin and destination are far enough apart, it willalways pay to get on the turnpike and cover distance at the bestrate of travel, even if this means adding a little mileage at eitherend.
—Dorfman, Samuelson, and Solow (1958, p.331)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 35 / 49

Introduction to Turnpike Theorems
It is exactly like a turnpike paralleled by a network of minor roads.
There is a fastest route between any two points; and if the originand destination are close together and far from the turnpike, thebest route may not touch the turnpike.
But if the origin and destination are far enough apart, it willalways pay to get on the turnpike and cover distance at the bestrate of travel, even if this means adding a little mileage at eitherend.
—Dorfman, Samuelson, and Solow (1958, p.331)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 35 / 49
Creating a turnpike example
Standard linear quadratic problem
x+ = Ax + Bu
L(x , u) = |Cx − ysp|2Q + |u − usp|2R Q > 0,R > 0
Choose an inconsistent setpoint
A = 1/2 B = 1/4 C = 1 Q = 1 R = 1
ys = Gus G = 1/2
usp = 0 ysp = 2
Rawlings and Amrit (UW) Economic MPC NMPC 2008 36 / 49

Creating a turnpike example
Standard linear quadratic problem
x+ = Ax + Bu
L(x , u) = |Cx − ysp|2Q + |u − usp|2R Q > 0,R > 0
Choose an inconsistent setpoint
A = 1/2 B = 1/4 C = 1 Q = 1 R = 1
ys = Gus G = 1/2
usp = 0 ysp = 2
Rawlings and Amrit (UW) Economic MPC NMPC 2008 36 / 49

Inconsistent Setpoint and Optimal steady state
u
(u∗, x∗)
(usp, xsp)
G
xOptimal steady state
usp = 0 xsp = 2
u∗ = 0.8 x∗ = 0.4
Rawlings and Amrit (UW) Economic MPC NMPC 2008 37 / 49

Optimal control problem
Cost function and dynamic model
V (x ,u) =N−1∑i=0
L(xi , ui ) s.t. x+ = Ax + Bu, x(0) = x
Optimal state and input trajectories
minu
V (x ,u) u0(x), x0(x)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 38 / 49
Optimal control problem
Cost function and dynamic model
V (x ,u) =N−1∑i=0
L(xi , ui ) s.t. x+ = Ax + Bu, x(0) = x
Optimal state and input trajectories
minu
V (x ,u) u0(x), x0(x)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 38 / 49

Optimal trajectory: xsp = 2, usp = 0
-1
-0.5
0
0.5
1
0 1 2 3 4
xN = 5
0.4
0.5
0.6
0.7
0.8
0.9
1
0 1 2 3 4
t
ux0 = 1
x0 = −1
Rawlings and Amrit (UW) Economic MPC NMPC 2008 39 / 49

Optimal trajectory: xsp = 2, usp = 0
-1
-0.5
0
0.5
1
0 5 10 15 20 25 30
x N = 30
0.4
0.5
0.6
0.7
0.8
0.9
1
0 5 10 15 20 25 30
t
u x0 = 1
x0 = −1
Rawlings and Amrit (UW) Economic MPC NMPC 2008 39 / 49

Optimal trajectory: xsp = 2, usp = 0
-1
-0.5
0
0.5
1
0 10 20 30 40 50 60 70 80 90 100
x N = 100
0.4
0.5
0.6
0.7
0.8
0.9
1
0 10 20 30 40 50 60 70 80 90 100
t
u x0 = 1
x0 = −1
Rawlings and Amrit (UW) Economic MPC NMPC 2008 39 / 49

Nonlinear Dynamics: Chemical Reaction
Chemical Reaction
A −→ B r = kcnA
k is the rate constant and n is the reaction order
Model
dcA
dt=
1
τ(cAf − cA)− kcn
A
dx
dt=
1
τ(u − x)− kxn τ = 10, k = 1.2, n = 2
x = cA reactor A concentrationu = cAf feed A concentration
Rawlings and Amrit (UW) Economic MPC NMPC 2008 40 / 49

Nonlinear Dynamics: Chemical Reaction
Chemical Reaction
A −→ B r = kcnA
k is the rate constant and n is the reaction order
Model
dcA
dt=
1
τ(cAf − cA)− kcn
A
dx
dt=
1
τ(u − x)− kxn τ = 10, k = 1.2, n = 2
x = cA reactor A concentrationu = cAf feed A concentration
Rawlings and Amrit (UW) Economic MPC NMPC 2008 40 / 49

Maximizing production rate in a CSTR
Input constraints
0 ≤ u(t) ≤ 31
T
∫ T
0u(t)dt = 1
T is the time interval considered
Maximize the average production rate
V (x(0), u(t)) = − 1
T
∫ T
0kxn(t)dt
The optimal control problem
minu(t)
V (x(0, u(t)) subject to model and constraints
Rawlings and Amrit (UW) Economic MPC NMPC 2008 41 / 49

Maximizing production rate in a CSTR
Input constraints
0 ≤ u(t) ≤ 31
T
∫ T
0u(t)dt = 1
T is the time interval considered
Maximize the average production rate
V (x(0), u(t)) = − 1
T
∫ T
0kxn(t)dt
The optimal control problem
minu(t)
V (x(0, u(t)) subject to model and constraints
Rawlings and Amrit (UW) Economic MPC NMPC 2008 41 / 49

Optimal Control
Optimal u and x
0
1
2
3
4
0 20 40 60 80 100
0
0.1
0.2
0.3
0.4
0.5
t
u x
Production rate, RB = kc2A
0
0.05
0.1
0.15
0.2
0.25
0.3
0 20 40 60 80 100t
c2A
cAs
〈c2A〉
c2As
Rawlings and Amrit (UW) Economic MPC NMPC 2008 42 / 49
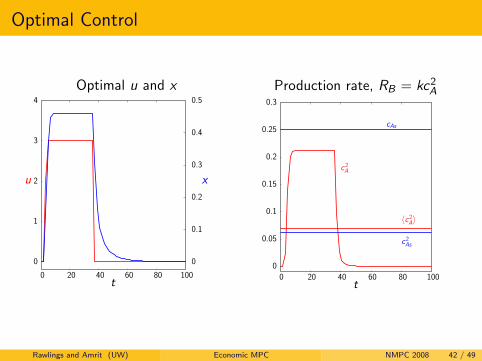
Optimal Control
Optimal u and x
0
1
2
3
4
0 20 40 60 80 100
0
0.1
0.2
0.3
0.4
0.5
t
u x
Production rate, RB = kc2A
0
0.05
0.1
0.15
0.2
0.25
0.3
0 20 40 60 80 100t
c2A
cAs
〈c2A〉
c2As
Rawlings and Amrit (UW) Economic MPC NMPC 2008 42 / 49

The Big Picture: Convexity and Nonlinearity
Mean state and control
x =1
N
N∑i=1
xi u =1
N
N∑i=1
ui
Carlson et al. (1991, pp.51–52)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 43 / 49

The Big Picture: Convexity and Nonlinearity
Mean state and control
x =1
N
N∑i=1
xi u =1
N
N∑i=1
ui
Convexity of L and nonlinearity of f
L (x , u) ≤ 1
N
N∑i=1
L(xi , ui ) Jensen’s inequality (1906)
x+ = Ax + Bu linear dynamics
Carlson et al. (1991, pp.51–52)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 43 / 49

The Big Picture: Convexity and Nonlinearity
Mean state and control
x =1
N
N∑i=1
xi u =1
N
N∑i=1
ui
Convexity of L and nonlinearity of f
L (x , u) ≤ 1
N
N∑i=1
L(xi , ui ) − γ (|xi − x , ui − u|)︸ ︷︷ ︸measure of convexity
x+ = f (x , u)︸ ︷︷ ︸measure of nonlinearity
Carlson et al. (1991, pp.51–52)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 43 / 49

The Big Picture: Convexity and Nonlinearity
Mean state and control
x =1
N
N∑i=1
xi u =1
N
N∑i=1
ui
Convexity of L and nonlinearity of f
L (x , u) ≤ 1
N
N∑i=1
L(xi , ui ) − γ (|xi − x , ui − u|)︸ ︷︷ ︸measure of convexity
x+ = f (x , u)︸ ︷︷ ︸measure of nonlinearity
Carlson et al. (1991, pp.51–52)
Rawlings and Amrit (UW) Economic MPC NMPC 2008 43 / 49
Conclusions
Overall goal: develop alternatives to the current two-layer approachto optimizing process economics
Require practical solutions with sound supporting theory
Nonlinear MPC provides one approach
Opportunities and Challenges . . .
Rawlings and Amrit (UW) Economic MPC NMPC 2008 44 / 49

Conclusions
Overall goal: develop alternatives to the current two-layer approachto optimizing process economics
Require practical solutions with sound supporting theory
Nonlinear MPC provides one approach
Opportunities and Challenges . . .
Rawlings and Amrit (UW) Economic MPC NMPC 2008 44 / 49

Conclusions
Overall goal: develop alternatives to the current two-layer approachto optimizing process economics
Require practical solutions with sound supporting theory
Nonlinear MPC provides one approach
Opportunities and Challenges . . .
Rawlings and Amrit (UW) Economic MPC NMPC 2008 44 / 49

Conclusions
Overall goal: develop alternatives to the current two-layer approachto optimizing process economics
Require practical solutions with sound supporting theory
Nonlinear MPC provides one approach
Opportunities and Challenges . . .
Rawlings and Amrit (UW) Economic MPC NMPC 2008 44 / 49

Conclusions
OpportunitiesI Performance advantage
I Consistent model for optimizing performanceI Consistent statement of process objectivesI Optimization software well developedI Linear dynamics and convex objectives well supportedI Leverage from industrial implementation of linear MPCI This is a big opportunity!
Rawlings and Amrit (UW) Economic MPC NMPC 2008 45 / 49
Conclusions
OpportunitiesI Performance advantageI Consistent model for optimizing performance
I Consistent statement of process objectivesI Optimization software well developedI Linear dynamics and convex objectives well supportedI Leverage from industrial implementation of linear MPCI This is a big opportunity!
Rawlings and Amrit (UW) Economic MPC NMPC 2008 45 / 49

Conclusions
OpportunitiesI Performance advantageI Consistent model for optimizing performanceI Consistent statement of process objectives
I Optimization software well developedI Linear dynamics and convex objectives well supportedI Leverage from industrial implementation of linear MPCI This is a big opportunity!
Rawlings and Amrit (UW) Economic MPC NMPC 2008 45 / 49

Conclusions
OpportunitiesI Performance advantageI Consistent model for optimizing performanceI Consistent statement of process objectivesI Optimization software well developed
I Linear dynamics and convex objectives well supportedI Leverage from industrial implementation of linear MPCI This is a big opportunity!
Rawlings and Amrit (UW) Economic MPC NMPC 2008 45 / 49
Conclusions
OpportunitiesI Performance advantageI Consistent model for optimizing performanceI Consistent statement of process objectivesI Optimization software well developedI Linear dynamics and convex objectives well supported
I Leverage from industrial implementation of linear MPCI This is a big opportunity!
Rawlings and Amrit (UW) Economic MPC NMPC 2008 45 / 49
Conclusions
OpportunitiesI Performance advantageI Consistent model for optimizing performanceI Consistent statement of process objectivesI Optimization software well developedI Linear dynamics and convex objectives well supportedI Leverage from industrial implementation of linear MPC
I This is a big opportunity!
Rawlings and Amrit (UW) Economic MPC NMPC 2008 45 / 49

Conclusions
OpportunitiesI Performance advantageI Consistent model for optimizing performanceI Consistent statement of process objectivesI Optimization software well developedI Linear dynamics and convex objectives well supportedI Leverage from industrial implementation of linear MPCI This is a big opportunity!
Rawlings and Amrit (UW) Economic MPC NMPC 2008 45 / 49

Conclusions
ChallengesI Understanding the interplay between nonlinearity of model and
convexity of objective
I Managing the complexity of an optimal economic solutionI Developing theory, algorithms, tuning procedures, and realistic case
studies that support industrial implementationI This is a big challenge!
Rawlings and Amrit (UW) Economic MPC NMPC 2008 46 / 49

Conclusions
ChallengesI Understanding the interplay between nonlinearity of model and
convexity of objectiveI Managing the complexity of an optimal economic solution
I Developing theory, algorithms, tuning procedures, and realistic casestudies that support industrial implementation
I This is a big challenge!
Rawlings and Amrit (UW) Economic MPC NMPC 2008 46 / 49

Conclusions
ChallengesI Understanding the interplay between nonlinearity of model and
convexity of objectiveI Managing the complexity of an optimal economic solutionI Developing theory, algorithms, tuning procedures, and realistic case
studies that support industrial implementation
I This is a big challenge!
Rawlings and Amrit (UW) Economic MPC NMPC 2008 46 / 49

Conclusions
ChallengesI Understanding the interplay between nonlinearity of model and
convexity of objectiveI Managing the complexity of an optimal economic solutionI Developing theory, algorithms, tuning procedures, and realistic case
studies that support industrial implementationI This is a big challenge!
Rawlings and Amrit (UW) Economic MPC NMPC 2008 46 / 49

Further Reading I
E. M. B. Aske, S. Strand, and S. Skogestad. Coordinator MPC for maximizing plantthroughput. Comput. Chem. Eng., 32:195–204, 2008.
T. Backx, O. Bosgra, and W. Marquardt. Integration of model predictive control andoptimization of processes. In Advanced Control of Chemical Processes, June 2000.
L. T. Biegler and J. B. Rawlings. Optimization approaches to nonlinear model predictivecontrol. In Y. Arkun and W. H. Ray, editors, Chemical Process Control–CPCIV,pages 543–571. CACHE, 1991.
D. A. Carlson, A. B. Haurie, and A. Leizarowitz. Infinite Horizon Optimal Control.Springer Verlag, second edition, 1991.
D. DeHaan and M. Guay. Extremum seeking control of nonlinear systems withparametric uncertainties and state constraints. In Proceedings of the 2004 AmericanControl Conference, pages 596–601, July 2004.
R. Dorfman, P. Samuelson, and R. Solow. Linear Programming and Economic Analysis.McGraw-Hill, New York, 1958.
S. Engell. Feedback control for optimal process operation. J. Proc. Cont., 17:203–219,2007.
Rawlings and Amrit (UW) Economic MPC NMPC 2008 47 / 49
Further Reading II
M. Guay and T. Zhang. Adaptive extremum seeking control of nonlinear dynamicsystems with parametric uncertainty. Automatica, 39:1283–1293, 2003.
M. Guay, D. Dochain, and M. Perrier. Adaptive extremum seeking control ofnonisothermal continuous stirred tank reactors with temperature constraints. InProceedings of the 42nd IEEE Conference on Decision and Control, Maui, Hawaii,December 2003.
A. Helbig, O. Abel, and W. Marquardt. Structural concepts for optimization basedcontrol of transient processes. In International Symposium on Nonlinear ModelPredictive Control, Ascona, Switzerland, 1998.
J. L. W. V. Jensen. Sur les fonctions convexes et les inegalites entre les valeursmoyennes. Acta Math., 30:175–193, 1906.
M. Krstic and H.-H. Wang. Stability of extremum seeking feedback for general nonlineardynamic systems. Automatica, 36:595–601, 2000.
M. Morari, Y. Arkun, and G. Stephanopoulos. Studies in the synthesis of controlstructures for chemical processes. Part I: Formulation of the problem. processdecomposition and the classification of the control tasks. Analysis of the optimizingcontrol structures. AIChE J., 26(2):220–232, 1980.
Rawlings and Amrit (UW) Economic MPC NMPC 2008 48 / 49

Further Reading III
J. B. Rawlings, D. Bonne, J. B. Jørgensen, A. N. Venkat, and S. B. Jørgensen.Unreachable setpoints in model predictive control. Accepted for publication in IEEETAC, April 2008.
O. Rotava and A. Zanin. Multivariable control and real-time optimization — anindustrial practical view. Hydrocarbon Processing, pages 61–71, June 2005.
S. Skogestad. Plantwide control: the search for the self-optimizing control structure. J.Proc. Cont., 10:487–507, 2000.
A. C. Zanin, M. Tvrzska de Gouvea, and D. Odloak. Integrating real-time optimizationinto the model predictive controller of the FCC system. Control Eng. Practice, 10:819–831, 2002.
V. M. Zavala and L. T. Biegler. The advanced step nmpc controller: optimality, stabilityand robustness. To appear in Automatica, 2008.
Rawlings and Amrit (UW) Economic MPC NMPC 2008 49 / 49
Related Documents











