Predictive Control From Practice to Theory James B. Rawlings Department of Chemical and Biological Engineering November 18, 2008 Systems and Control Centennial Session AICHE Annual Meeting Philadelphia, PA Rawlings Predictive Control From Practice to Theory 1 / 27

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Predictive Control From Practice to Theory
James B. Rawlings
Department of Chemical and Biological Engineering
November 18, 2008Systems and Control Centennial Session
AICHE Annual MeetingPhiladelphia, PA
Rawlings Predictive Control From Practice to Theory 1 / 27

Outline
1 Model Predictive Control
2 From Practice . . .
3 To Theory . . .
4 And Back Again
Not to be confused with a paper of similar title, “There and Back Again,”B. Baggins (Middle Earth)
Rawlings Predictive Control From Practice to Theory 2 / 27

Outline
1 Model Predictive Control
2 From Practice . . .
3 To Theory . . .
4 And Back Again
Not to be confused with a paper of similar title, “There and Back Again,”B. Baggins (Middle Earth)
Rawlings Predictive Control From Practice to Theory 2 / 27

The power of abstraction
process
sensorsactuators
dx
dt= f (x , u)
y = g(x , u)
Rawlings Predictive Control From Practice to Theory 3 / 27

The model predictive control framework
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
������������������������������������������������
����
����
��������
������
������
����
����
���
���
MeasurementMH Estimate
MPC controlForecast
t time
Reconcile the past Forecast the future
sensorsy
actuatorsu
Rawlings Predictive Control From Practice to Theory 4 / 27

Predictive control
The future influences the present just as much as the past does.
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
������������������������������������������������
����
����
��������
������
������
����
����
���
���
MeasurementMH Estimate
MPC controlForecast
t time
Reconcile the past Forecast the future
sensorsy
actuatorsu
Rawlings Predictive Control From Practice to Theory 5 / 27

Predictive control
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
������������������������������������������������
����
����
��������
������
������
����
����
���
���
MeasurementMH Estimate
MPC controlForecast
t time
Reconcile the past Forecast the future
sensorsy
actuatorsu
minu(t)
∫ T
0|ysp − g(x , u)|2Q + |usp − u|2R dt
x = f (x , u)
x(0) = x0 (given)
y = g(x , u)Rawlings Predictive Control From Practice to Theory 5 / 27

State estimation
When I want to understand what is happening today or try to decide whatwill happen tomorrow, I look back.
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
������������������������������������������������
����
����
��������
������
������
����
����
���
���
MeasurementMH Estimate
MPC controlForecast
t time
Reconcile the past Forecast the future
sensorsy
actuatorsu
Rawlings Predictive Control From Practice to Theory 6 / 27

State estimation
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
����
������������������������������������������������
����
����
��������
������
������
����
����
���
���
MeasurementMH Estimate
MPC controlForecast
t time
Reconcile the past Forecast the future
sensorsy
actuatorsu
minx0,w(t)
∫ 0
−T|y − g(x , u)|2R + |x − f (x , u)|2Q dt
x = f (x , u) + w (process noise)
y = g(x , u) + v (measurement noise)
Rawlings Predictive Control From Practice to Theory 6 / 27

Feedback
One technique for obtaining a feedback controller synthesis fromknowledge of open-loop controllers is to measure the currentcontrol process state and then compute very rapidly for theopen-loop control function.
The first portion of this function isthen used during a short time interval, after which a newmeasurement of the process state is made and a new open-loopcontrol function is computed for this new measurement. Theprocedure is then repeated.
— Lee and Markus (1967)Foundations of Optimal Control Theory
Everything has been thought of before, but the problem is tothink of it again.
— Goethe
Rawlings Predictive Control From Practice to Theory 7 / 27

Feedback
One technique for obtaining a feedback controller synthesis fromknowledge of open-loop controllers is to measure the currentcontrol process state and then compute very rapidly for theopen-loop control function. The first portion of this function isthen used during a short time interval, after which a newmeasurement of the process state is made and a new open-loopcontrol function is computed for this new measurement.
Theprocedure is then repeated.
— Lee and Markus (1967)Foundations of Optimal Control Theory
Everything has been thought of before, but the problem is tothink of it again.
— Goethe
Rawlings Predictive Control From Practice to Theory 7 / 27

Feedback
One technique for obtaining a feedback controller synthesis fromknowledge of open-loop controllers is to measure the currentcontrol process state and then compute very rapidly for theopen-loop control function. The first portion of this function isthen used during a short time interval, after which a newmeasurement of the process state is made and a new open-loopcontrol function is computed for this new measurement. Theprocedure is then repeated.
— Lee and Markus (1967)Foundations of Optimal Control Theory
Everything has been thought of before, but the problem is tothink of it again.
— Goethe
Rawlings Predictive Control From Practice to Theory 7 / 27

Feedback
One technique for obtaining a feedback controller synthesis fromknowledge of open-loop controllers is to measure the currentcontrol process state and then compute very rapidly for theopen-loop control function. The first portion of this function isthen used during a short time interval, after which a newmeasurement of the process state is made and a new open-loopcontrol function is computed for this new measurement. Theprocedure is then repeated.
— Lee and Markus (1967)Foundations of Optimal Control Theory
Everything has been thought of before, but the problem is tothink of it again.
— Goethe
Rawlings Predictive Control From Practice to Theory 7 / 27

Feedback
One technique for obtaining a feedback controller synthesis fromknowledge of open-loop controllers is to measure the currentcontrol process state and then compute very rapidly for theopen-loop control function. The first portion of this function isthen used during a short time interval, after which a newmeasurement of the process state is made and a new open-loopcontrol function is computed for this new measurement. Theprocedure is then repeated.
— Lee and Markus (1967)Foundations of Optimal Control Theory
Everything has been thought of before, but the problem is tothink of it again.
— Goethe
Rawlings Predictive Control From Practice to Theory 7 / 27

Industrial practice of MPC
Validation
Planning and Scheduling
Reconciliation
Model UpdateOptimizationSteady State
Plant
Controller
Two layer structure
Steady-state layerI RTO optimizes steady state
modelI Optimal setpoints passed to
dynamic layer
Dynamic layerI Controller tracks the setpointsI Linear MPC
(replaces multiloop PID)
Rawlings Predictive Control From Practice to Theory 8 / 27

Industrial practice of MPC
Validation
Planning and Scheduling
Reconciliation
Model UpdateOptimizationSteady State
Plant
Controller
Two layer structure
Steady-state layerI RTO optimizes steady state
modelI Optimal setpoints passed to
dynamic layer
Dynamic layerI Controller tracks the setpointsI Linear MPC
(replaces multiloop PID)
Rawlings Predictive Control From Practice to Theory 8 / 27

Large industrial success story!
Linear MPC and ethylene manufacturing
Number of MPC applications in ethylene: 800 to 1200
Credits 500 to 800 M$/yr (2007)
Achieved primarily by increased on-spec product, decreased energy use
Eastman Chemical experience with MPC
First MPC implemented in 1996
Currently 55-60 MPC applications of varying complexity
30-50 M$/year increased profit due to increased throughput (2008)
Praxair experience with MPC
Praxair currently has more than 150 MPC installations
16 M$/year increased profit (2008)
Rawlings Predictive Control From Practice to Theory 9 / 27

Large industrial success story!
Linear MPC and ethylene manufacturing
Number of MPC applications in ethylene: 800 to 1200
Credits 500 to 800 M$/yr (2007)
Achieved primarily by increased on-spec product, decreased energy use
Eastman Chemical experience with MPC
First MPC implemented in 1996
Currently 55-60 MPC applications of varying complexity
30-50 M$/year increased profit due to increased throughput (2008)
Praxair experience with MPC
Praxair currently has more than 150 MPC installations
16 M$/year increased profit (2008)
Rawlings Predictive Control From Practice to Theory 9 / 27

Large industrial success story!
Linear MPC and ethylene manufacturing
Number of MPC applications in ethylene: 800 to 1200
Credits 500 to 800 M$/yr (2007)
Achieved primarily by increased on-spec product, decreased energy use
Eastman Chemical experience with MPC
First MPC implemented in 1996
Currently 55-60 MPC applications of varying complexity
30-50 M$/year increased profit due to increased throughput (2008)
Praxair experience with MPC
Praxair currently has more than 150 MPC installations
16 M$/year increased profit (2008)
Rawlings Predictive Control From Practice to Theory 9 / 27

Large industrial success story!
Linear MPC and ethylene manufacturing
Number of MPC applications in ethylene: 800 to 1200
Credits 500 to 800 M$/yr (2007)
Achieved primarily by increased on-spec product, decreased energy use
Eastman Chemical experience with MPC
First MPC implemented in 1996
Currently 55-60 MPC applications of varying complexity
30-50 M$/year increased profit due to increased throughput (2008)
Praxair experience with MPC
Praxair currently has more than 150 MPC installations
16 M$/year increased profit (2008)
Rawlings Predictive Control From Practice to Theory 9 / 27

Large industrial success story!
Linear MPC and ethylene manufacturing
Number of MPC applications in ethylene: 800 to 1200
Credits 500 to 800 M$/yr (2007)
Achieved primarily by increased on-spec product, decreased energy use
Eastman Chemical experience with MPC
First MPC implemented in 1996
Currently 55-60 MPC applications of varying complexity
30-50 M$/year increased profit due to increased throughput (2008)
Praxair experience with MPC
Praxair currently has more than 150 MPC installations
16 M$/year increased profit (2008)
Rawlings Predictive Control From Practice to Theory 9 / 27

Large industrial success story!
Linear MPC and ethylene manufacturing
Number of MPC applications in ethylene: 800 to 1200
Credits 500 to 800 M$/yr (2007)
Achieved primarily by increased on-spec product, decreased energy use
Eastman Chemical experience with MPC
First MPC implemented in 1996
Currently 55-60 MPC applications of varying complexity
30-50 M$/year increased profit due to increased throughput (2008)
Praxair experience with MPC
Praxair currently has more than 150 MPC installations
16 M$/year increased profit (2008)
Rawlings Predictive Control From Practice to Theory 9 / 27

Large industrial success story!
Linear MPC and ethylene manufacturing
Number of MPC applications in ethylene: 800 to 1200
Credits 500 to 800 M$/yr (2007)
Achieved primarily by increased on-spec product, decreased energy use
Eastman Chemical experience with MPC
First MPC implemented in 1996
Currently 55-60 MPC applications of varying complexity
30-50 M$/year increased profit due to increased throughput (2008)
Praxair experience with MPC
Praxair currently has more than 150 MPC installations
16 M$/year increased profit (2008)
Rawlings Predictive Control From Practice to Theory 9 / 27

Large industrial success story!
Linear MPC and ethylene manufacturing
Number of MPC applications in ethylene: 800 to 1200
Credits 500 to 800 M$/yr (2007)
Achieved primarily by increased on-spec product, decreased energy use
Eastman Chemical experience with MPC
First MPC implemented in 1996
Currently 55-60 MPC applications of varying complexity
30-50 M$/year increased profit due to increased throughput (2008)
Praxair experience with MPC
Praxair currently has more than 150 MPC installations
16 M$/year increased profit (2008)
Rawlings Predictive Control From Practice to Theory 9 / 27

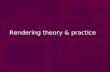
Impact for 13 ethylene plants (Starks and Arrieta, 2007)
Hydrocarbons AC&O 17
Advanced ControlAdvanced Control& Optimization& Optimization
We’re Doing it For the Money
$0
$10,000,000
$20,000,000
$30,000,000
$40,000,000
$50,000,000
$60,000,000
1Q 2
000
3Q 2
000
1Q 2
001
3Q 2
001
1Q 2
002
3Q 2
002
1Q 2
003
3Q 2
003
1Q 2
004
3Q 2
004
1Q 2
005
3Q 2
005
1Q200
6
3Q200
6
$0
$100,000,000
$200,000,000
$300,000,000
$400,000,000
$500,000,000
$600,000,000
Cumulative Quarterly
Rawlings Predictive Control From Practice to Theory 10 / 27

Maintaining technology (Starks and Arrieta, 2007)
Hydrocarbons AC&O 10
Advanced ControlAdvanced Control& Optimization& Optimization
Challenges (continued 1)
2006 Average DMC Service Factors (per plant)
0.0%
20.0%
40.0%
60.0%
80.0%
100.0%
A B C D E F G H I J K L M
Plant
DM
C S
ervi
ce F
acto
r (%
)
Plants L & M experienced APC personnel changes
Rawlings Predictive Control From Practice to Theory 11 / 27

Broader industrial impact (Qin and Badgwell, 2003)
Area Aspen Honeywell Adersa PCL MDC TotalTechnology Hi-Spec
Refining 1200 480 280 25 1985
Petrochemicals 450 80 - 20 550
Chemicals 100 20 3 21 144
Pulp and Paper 18 50 - - 68
Air & Gas - 10 - - 10
Utility - 10 - 4 14
Mining/Metallurgy 8 6 7 16 37
Food Processing - - 41 10 51
Polymer 17 - - - 17
Furnaces - - 42 3 45
Aerospace/Defense - - 13 - 13
Automotive - - 7 - 7
Unclassified 40 40 1045 26 450 1601
Total 1833 696 1438 125 450 4542
First App. DMC:1985 PCT:1984 IDCOM:1973 PCL: SMOC:IDCOM-M:1987 RMPCT:1991 HIECON:1986 1984 1988
OPC:1987
Largest App 603x283 225x85 - 31x12 -
Rawlings Predictive Control From Practice to Theory 12 / 27

Are all the problems solved?
Some questions to consider
Has the application base stopped growing?
Is the technology mature?
Is the theory complete?
Do we have tools to decompose large-scale systems into manageableproblems?
Do we have tools to optimize dynamic economic operation?
Have control researchers stopped working on linear systems?
Rawlings Predictive Control From Practice to Theory 13 / 27

Are all the problems solved?
Some questions to consider
Has the application base stopped growing?
Is the technology mature?
Is the theory complete?
Do we have tools to decompose large-scale systems into manageableproblems?
Do we have tools to optimize dynamic economic operation?
Have control researchers stopped working on linear systems?
Rawlings Predictive Control From Practice to Theory 13 / 27

Are all the problems solved?
Some questions to consider
Has the application base stopped growing?
Is the technology mature?
Is the theory complete?
Do we have tools to decompose large-scale systems into manageableproblems?
Do we have tools to optimize dynamic economic operation?
Have control researchers stopped working on linear systems?
Rawlings Predictive Control From Practice to Theory 13 / 27

Are all the problems solved?
Some questions to consider
Has the application base stopped growing?
Is the technology mature?
Is the theory complete?
Do we have tools to decompose large-scale systems into manageableproblems?
Do we have tools to optimize dynamic economic operation?
Have control researchers stopped working on linear systems?
Rawlings Predictive Control From Practice to Theory 13 / 27

Are all the problems solved?
Some questions to consider
Has the application base stopped growing?
Is the technology mature?
Is the theory complete?
Do we have tools to decompose large-scale systems into manageableproblems?
Do we have tools to optimize dynamic economic operation?
Have control researchers stopped working on linear systems?
Rawlings Predictive Control From Practice to Theory 13 / 27

Are all the problems solved?
Some questions to consider
Has the application base stopped growing?
Is the technology mature?
Is the theory complete?
Do we have tools to decompose large-scale systems into manageableproblems?
Do we have tools to optimize dynamic economic operation?
Have control researchers stopped working on linear systems?
Rawlings Predictive Control From Practice to Theory 13 / 27

Has the application base stopped growing?
A report & a presentation prepared by:
Available for download: http://www.decision.eu/smart2007.htm
European CommissionDG information Society & Media
Monitoring and control: today's market, its evolution till 2020 and the impact of ICT on
these
Workshop:
9th of October 2008
A report & a presentation prepared by:
Available for download: http://www.decision.eu/smart2007.htm
EC – DG INFSO – SMART 2007/047Monitoring and control: today's market, its evolution till 2020 and the impact of ICT on these
2
Intentionally blank
2
WORKSHOP: Brussels the 9th of October 2008Rawlings Predictive Control From Practice to Theory 14 / 27

Has the application base stopped growing?A report & a presentation prepared by:
Available for download: http://www.decision.eu/smart2007.htm
EC – DG INFSO – SMART 2007/047Monitoring and control: today's market, its evolution till 2020 and the impact of ICT on these
Bottom-up analysis: no overlap between markets• The results of our analysis is a global and exhaustive estimate of the Monitoring &
Control market situation with a cohesive 2 axis breakdown by product and solution, and by application market showing current values and trend potential.
• Our approach was designed to evaluate the global market value with appropriate scales to avoid all major sources of overlapping:
– First level: a bottom up analysis of 30 separate markets.
– Second level: application market definitions linked to the hypothesis of the existence of:
• A dedicated specific market such as Embedded solutions;
• Vertical applications specific markets such as Factory automation;
• Horizontal product layer oriented market such as ERP.
WORKSHOP: Brussels the 9th of October 2008
23
A report & a presentation prepared by:
Available for download: http://www.decision.eu/smart2007.htm
EC – DG INFSO – SMART 2007/047Monitoring and control: today's market, its evolution till 2020 and the impact of ICT on these
3. Worldwide Monitoring & Control Market• The worldwide market for Monitoring & Control products and
solutions is around 188 billion euros.
• This represents 8% of total ICT expenditures worldwide.
• In the field of ICT, this is comparable to:
– the whole semiconductor industry world revenues;
– twice the world mobile phone manufacturers revenues.
• Services, with more than 50% of the market value, have the biggest share.
• The 3 larger sub markets represent together over 100 billion euros, namely:
– integration, installation & training services with 38 billion euros;
– control hardware with 36 billion euros;
– maintenance, repair & overall services with 30 billion euros.
• The 3 larger application markets are Vehicles, Process and Manufacturing industries.
• Europe represents 32 % of the world total market value.
35%
12%
53%
Hardware Soft Services
Definitions- bundle OS & drivers included in hardware- application development included in services
WORKSHOP: Brussels the 9th of October 2008
24
Total world: €187,9 bn
Rawlings Predictive Control From Practice to Theory 15 / 27

Has the application base stopped growing?
A report & a presentation prepared by:
Available for download: http://www.decision.eu/smart2007.htm
EC – DG INFSO – SMART 2007/047Monitoring and control: today's market, its evolution till 2020 and the impact of ICT on these
European Monitoring & Control Market
• The European M&C market is around 62 billion euros:
- In relative terms, compared to the European economy, this is more than 1 day of the total EU-27 yearly Gross Domestic Product.
- Compared to services businesses, it represents 8% of the EU-27 Telecoms & Transport sector gross value-added.
- Compared to total employment inside EU-27 and with a value added share of 70%, it is worth 750 000 jobs.
• Structural European details are quite comparable to Worldwide ones:
- More than 50% of services.
- 3 same major application markets.
- 3 same majors product and solutions sub segments.
32%
12%
56%
Hardware Soft Services
Definitions- bundle OS & drivers included in hardware- application development included in services
WORKSHOP: Brussels the 9th of October 2008
25
Total Europe: €61,5 bn
A report & a presentation prepared by:
Available for download: http://www.decision.eu/smart2007.htm
EC – DG INFSO – SMART 2007/047Monitoring and control: today's market, its evolution till 2020 and the impact of ICT on these
Worldwide Monitoring & Control Marketsby application
• Factory automation, the sum of Manufacturing plus Process industries, remains the main market with 58 billion euros, comparable to Vehicles (56 billion):
– With 38 billion euros out of 58, Services dominates with 2/3 of total Factory Automation market.
– Among Services the sub segment Integration, installation and training accounts for 50% of them.
• Together, three application markets, Vehicles, Manufacturing and Process industries represent 60% of total Monitoring & Control market.
• Ranked between 10 and 20 billion euros the next three applications markets are in order :
– Healthcare
– Critical infrastructures
– Logistic & transport
• Last one, Home is, for the moment, a small niche market.
56,4
31,5
26,3
18,3
18,0
10,9
8,6
7,2
7,2
4,3
0,7
Vehicles
IndustryManufacturing
IndustryProcess
Healthcare
CriticalInfrastructures
Logistics &transport
Environment
Power grids
Building
Householdappliances
Homes
HardSoftServ
57,8
26
WORKSHOP: Brussels the 9th of October 2008
Total world: €187,9 bn
Rawlings Predictive Control From Practice to Theory 16 / 27

Is the theory complete?
0
50
100
150
200
250
300
350
400
450
1965 1970 1975 1980 1985 1990 1995 2000 2005
year
papers
year
MPC
Rawlings Predictive Control From Practice to Theory 17 / 27

Is the theory complete?
0
200
400
600
800
1000
1200
1400
1965 1970 1975 1980 1985 1990 1995 2000 2005
year
papers
year
MPCFB ControlChem Engr
Rawlings Predictive Control From Practice to Theory 18 / 27

Ratio of MPC papers to feedback control papers
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
1965 1970 1975 1980 1985 1990 1995 2000 2005
MPC/FB Control
Rawlings Predictive Control From Practice to Theory 19 / 27

Decomposing large-scale systems?
Rawlings Predictive Control From Practice to Theory 20 / 27

Decomposing large-scale systems?
Material flow
Energy flow
Rawlings Predictive Control From Practice to Theory 21 / 27

Optimizing economics: Current industrial practice
Validation
Planning and Scheduling
Reconciliation
Model UpdateOptimizationSteady State
Plant
Controller
Two layer structure
Drawbacks
I Inconsistent modelsI Re-identify linear model as
setpoint changesI Time scale separation may not
holdI Economics unavailable in
dynamic layer
Rawlings Predictive Control From Practice to Theory 22 / 27

Optimizing economics: Current industrial practice
Validation
Planning and Scheduling
Reconciliation
Model UpdateOptimizationSteady State
Plant
Controller
Two layer structure
DrawbacksI Inconsistent modelsI Re-identify linear model as
setpoint changesI Time scale separation may not
holdI Economics unavailable in
dynamic layer
Rawlings Predictive Control From Practice to Theory 22 / 27

Optimizing economics: what’s desirable?
-4 -2 0 2 4-4
-20
24
Profit
Input (u)
State (x)
Profit
-4 -2 0 2 4-4
-20
24
Profit
Input (u)
State (x)
Profit
Rawlings Predictive Control From Practice to Theory 23 / 27

Optimizing economics: what’s desirable?
-4 -2 0 2 4-4
-20
24
Profit
Input (u)
State (x)
Profit
-4 -2 0 2 4-4
-20
24
Profit
Input (u)
State (x)
Profit
Rawlings Predictive Control From Practice to Theory 23 / 27

Predictive Control. There and Back Again
Optimal dynamic operation of chemical processes has undergone atotal transformation in the last 20 years.
Both in theory and inpractice.
The currently available theory splits the problem into state estimationand regulation. Both are posed and solved as online optimizationproblems. Basic properties have been established. Lyapunov functionsare the dominant theoretical tool for analysis and design.
Industrial implementations and vendor software are basically keepingpace with the best available theory and algorithms. That is asurprising and noteworthy outcome!
Obtaining the dynamic models remains a significant bottleneck.
Rawlings Predictive Control From Practice to Theory 24 / 27

Predictive Control. There and Back Again
Optimal dynamic operation of chemical processes has undergone atotal transformation in the last 20 years. Both in theory and inpractice.
The currently available theory splits the problem into state estimationand regulation. Both are posed and solved as online optimizationproblems. Basic properties have been established. Lyapunov functionsare the dominant theoretical tool for analysis and design.
Industrial implementations and vendor software are basically keepingpace with the best available theory and algorithms. That is asurprising and noteworthy outcome!
Obtaining the dynamic models remains a significant bottleneck.
Rawlings Predictive Control From Practice to Theory 24 / 27

Predictive Control. There and Back Again
Optimal dynamic operation of chemical processes has undergone atotal transformation in the last 20 years. Both in theory and inpractice.
The currently available theory splits the problem into state estimationand regulation.
Both are posed and solved as online optimizationproblems. Basic properties have been established. Lyapunov functionsare the dominant theoretical tool for analysis and design.
Industrial implementations and vendor software are basically keepingpace with the best available theory and algorithms. That is asurprising and noteworthy outcome!
Obtaining the dynamic models remains a significant bottleneck.
Rawlings Predictive Control From Practice to Theory 24 / 27

Predictive Control. There and Back Again
Optimal dynamic operation of chemical processes has undergone atotal transformation in the last 20 years. Both in theory and inpractice.
The currently available theory splits the problem into state estimationand regulation. Both are posed and solved as online optimizationproblems.
Basic properties have been established. Lyapunov functionsare the dominant theoretical tool for analysis and design.
Industrial implementations and vendor software are basically keepingpace with the best available theory and algorithms. That is asurprising and noteworthy outcome!
Obtaining the dynamic models remains a significant bottleneck.
Rawlings Predictive Control From Practice to Theory 24 / 27

Predictive Control. There and Back Again
Optimal dynamic operation of chemical processes has undergone atotal transformation in the last 20 years. Both in theory and inpractice.
The currently available theory splits the problem into state estimationand regulation. Both are posed and solved as online optimizationproblems. Basic properties have been established.
Lyapunov functionsare the dominant theoretical tool for analysis and design.
Industrial implementations and vendor software are basically keepingpace with the best available theory and algorithms. That is asurprising and noteworthy outcome!
Obtaining the dynamic models remains a significant bottleneck.
Rawlings Predictive Control From Practice to Theory 24 / 27

Predictive Control. There and Back Again
Optimal dynamic operation of chemical processes has undergone atotal transformation in the last 20 years. Both in theory and inpractice.
The currently available theory splits the problem into state estimationand regulation. Both are posed and solved as online optimizationproblems. Basic properties have been established. Lyapunov functionsare the dominant theoretical tool for analysis and design.
Industrial implementations and vendor software are basically keepingpace with the best available theory and algorithms. That is asurprising and noteworthy outcome!
Obtaining the dynamic models remains a significant bottleneck.
Rawlings Predictive Control From Practice to Theory 24 / 27

Predictive Control. There and Back Again
Optimal dynamic operation of chemical processes has undergone atotal transformation in the last 20 years. Both in theory and inpractice.
The currently available theory splits the problem into state estimationand regulation. Both are posed and solved as online optimizationproblems. Basic properties have been established. Lyapunov functionsare the dominant theoretical tool for analysis and design.
Industrial implementations and vendor software are basically keepingpace with the best available theory and algorithms.
That is asurprising and noteworthy outcome!
Obtaining the dynamic models remains a significant bottleneck.
Rawlings Predictive Control From Practice to Theory 24 / 27

Predictive Control. There and Back Again
Optimal dynamic operation of chemical processes has undergone atotal transformation in the last 20 years. Both in theory and inpractice.
The currently available theory splits the problem into state estimationand regulation. Both are posed and solved as online optimizationproblems. Basic properties have been established. Lyapunov functionsare the dominant theoretical tool for analysis and design.
Industrial implementations and vendor software are basically keepingpace with the best available theory and algorithms. That is asurprising and noteworthy outcome!
Obtaining the dynamic models remains a significant bottleneck.
Rawlings Predictive Control From Practice to Theory 24 / 27

Predictive Control. There and Back Again
Optimal dynamic operation of chemical processes has undergone atotal transformation in the last 20 years. Both in theory and inpractice.
The currently available theory splits the problem into state estimationand regulation. Both are posed and solved as online optimizationproblems. Basic properties have been established. Lyapunov functionsare the dominant theoretical tool for analysis and design.
Industrial implementations and vendor software are basically keepingpace with the best available theory and algorithms. That is asurprising and noteworthy outcome!
Obtaining the dynamic models remains a significant bottleneck.
Rawlings Predictive Control From Practice to Theory 24 / 27

Critiquing the research enterprise
The abstraction level is high and barrier to entry is significant.
But the barrier is no higher than any other mathematically intensiveresearch field in chemical engineering. Fluid mechanics, statisticalmechanics, molecular dynamics, . . .
Researchers in this community have not done a good jobcommunicating the significant advances in this field to theircolleagues outside the field.
Let’s start the ball rolling by updating and widely communicating Qinand Badgwell (2003).
Rawlings Predictive Control From Practice to Theory 25 / 27

Critiquing the research enterprise
The abstraction level is high and barrier to entry is significant.
But the barrier is no higher than any other mathematically intensiveresearch field in chemical engineering.
Fluid mechanics, statisticalmechanics, molecular dynamics, . . .
Researchers in this community have not done a good jobcommunicating the significant advances in this field to theircolleagues outside the field.
Let’s start the ball rolling by updating and widely communicating Qinand Badgwell (2003).
Rawlings Predictive Control From Practice to Theory 25 / 27

Critiquing the research enterprise
The abstraction level is high and barrier to entry is significant.
But the barrier is no higher than any other mathematically intensiveresearch field in chemical engineering. Fluid mechanics, statisticalmechanics, molecular dynamics, . . .
Researchers in this community have not done a good jobcommunicating the significant advances in this field to theircolleagues outside the field.
Let’s start the ball rolling by updating and widely communicating Qinand Badgwell (2003).
Rawlings Predictive Control From Practice to Theory 25 / 27

Critiquing the research enterprise
The abstraction level is high and barrier to entry is significant.
But the barrier is no higher than any other mathematically intensiveresearch field in chemical engineering. Fluid mechanics, statisticalmechanics, molecular dynamics, . . .
Researchers in this community have not done a good jobcommunicating the significant advances in this field to theircolleagues outside the field.
Let’s start the ball rolling by updating and widely communicating Qinand Badgwell (2003).
Rawlings Predictive Control From Practice to Theory 25 / 27

Critiquing the research enterprise
The abstraction level is high and barrier to entry is significant.
But the barrier is no higher than any other mathematically intensiveresearch field in chemical engineering. Fluid mechanics, statisticalmechanics, molecular dynamics, . . .
Researchers in this community have not done a good jobcommunicating the significant advances in this field to theircolleagues outside the field.
Let’s start the ball rolling by updating and widely communicating Qinand Badgwell (2003).
Rawlings Predictive Control From Practice to Theory 25 / 27

Acknowledgments
Don Bartusiak, ExxonMobil
Tom Badgwell, Aspentech
Jim Downs, Eastman Chemical
Larry Megan, Praxair
Rahul Bindlish, Dow
Financial support from NSF #CTS-0825306, 0456694 andTexas Wisconsin California Control Consortium (TWCCC) members
Rawlings Predictive Control From Practice to Theory 26 / 27

Further reading
S. J. Qin and T. A. Badgwell. A survey of industrial model predictive controltechnology. Control Eng. Prac., 11(7):733–764, 2003.
D. M. Starks and E. Arrieta. Maintaining AC&O applications, sustaining the gain. InProceedings of National AIChE Spring Meeting, Houston, Texas, April 2007.
Rawlings Predictive Control From Practice to Theory 27 / 27
Related Documents