On the ICP Algorithm On the ICP Algorithm Esther Ezra, Micha Sharir Esther Ezra, Micha Sharir Alon Efrat Alon Efrat

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
On the ICP AlgorithmOn the ICP Algorithm
Esther Ezra, Micha SharirEsther Ezra, Micha Sharir
Alon EfratAlon Efrat
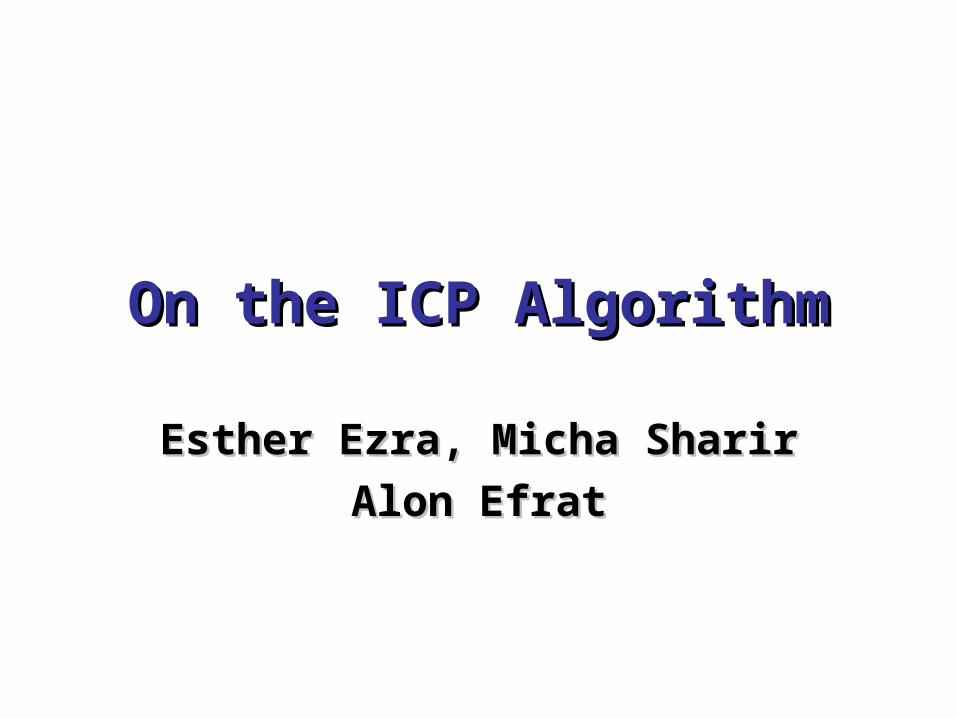
The problem: Pattern MatchingThe problem: Pattern Matching
Input:
A = {a1, …, am}, B = {b1, …, bn} A,B Rd
Goal:
Translate A by a vector t Rd s.t. (A+t,B) is minimized.
The (1-directional) cost function:
22
1( , ) || ( ) ||Ba AA t B a t N a t
m
The cost function (measures
resemblance).
The nearest neighbor of a in B.
A , B
( , ) max || ( ) ||a A BA t B a t N a t

The algorithm [Besl & Mckay 92]The algorithm [Besl & Mckay 92]
Use local improvements:
Repeat: At each iteration i, with cumulative translation ti-1
• Assign each point a+ti-1 A+ti-1 to its NN b = NB(a+ti-1)
• Compute the relative translation ti that minimizes with respect to this fixed (frozen) NN-assignment.
Translate the points of A by ti (to be aligned to B). ti ti-1 + ti .
• Stop when the value of does not decrease.
The overall translation vector previously computed. t0 = 0 .
Some of the points of A may acquire
new NN in B.
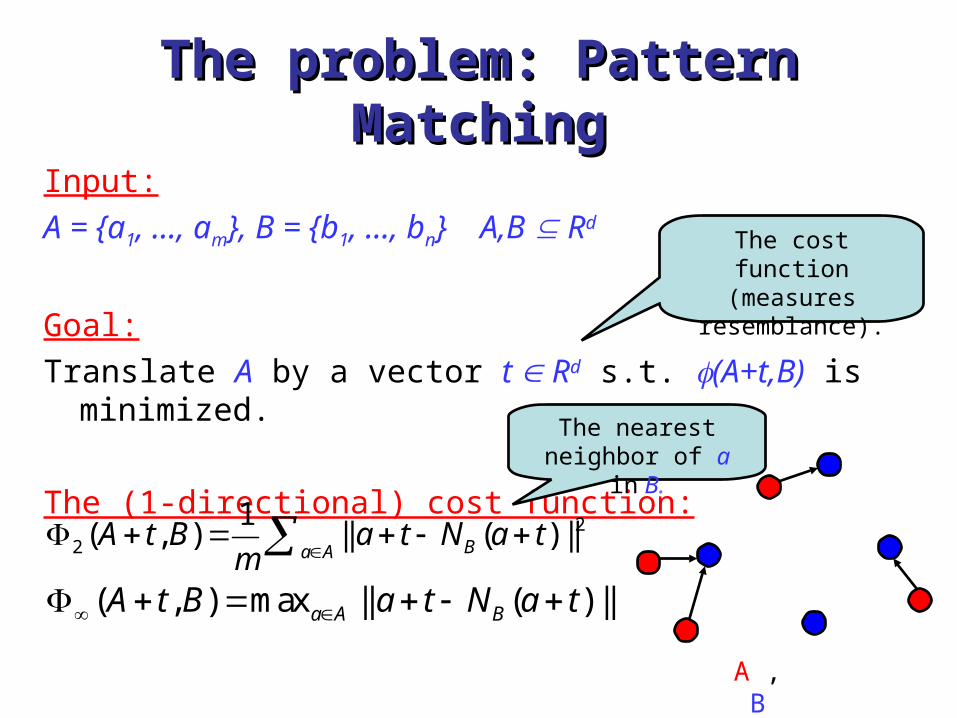
The algorithm: Convergence
[Besl & Mckay 92].
1. The value of =2 decreases at each iteration.
2. The algorithm monotonically converges to a local minimum.
This applies for = as well.a1 a2 a3
b1 b2 b3 b4
A local minimum of the ICP algorithm.
The global minimum is attained when a1, a2, a3 are aligned on top of b2,
b3, b4 .
NN and Voronoi diagramsNN and Voronoi diagrams
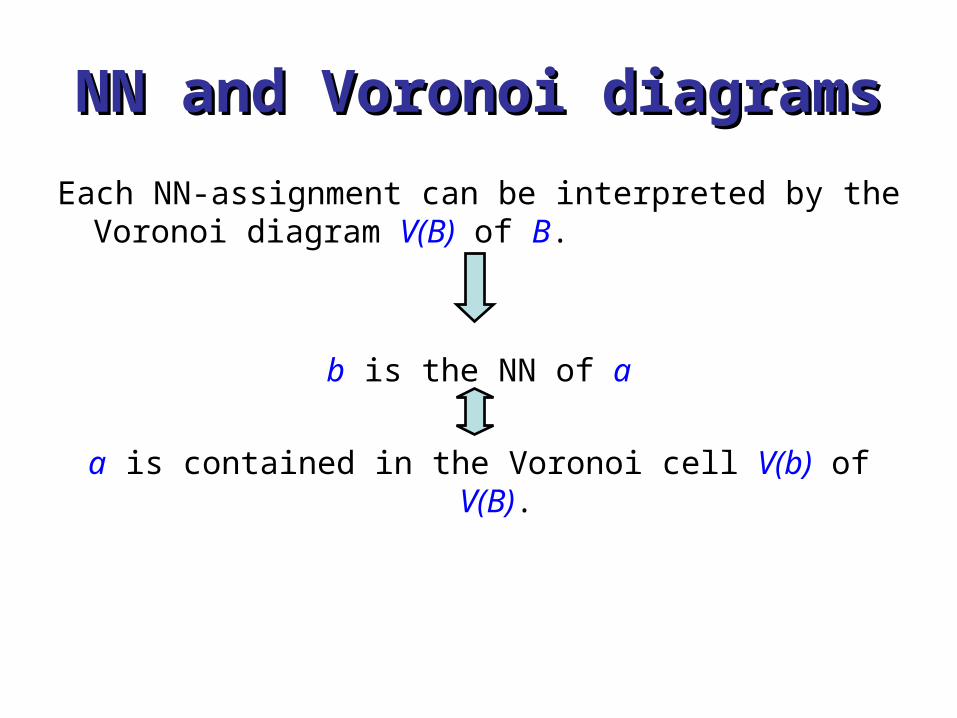
Each NN-assignment can be interpreted by the Voronoi diagram V(B) of B.
b is the NN of a
a is contained in the Voronoi cell V(b) of V(B).
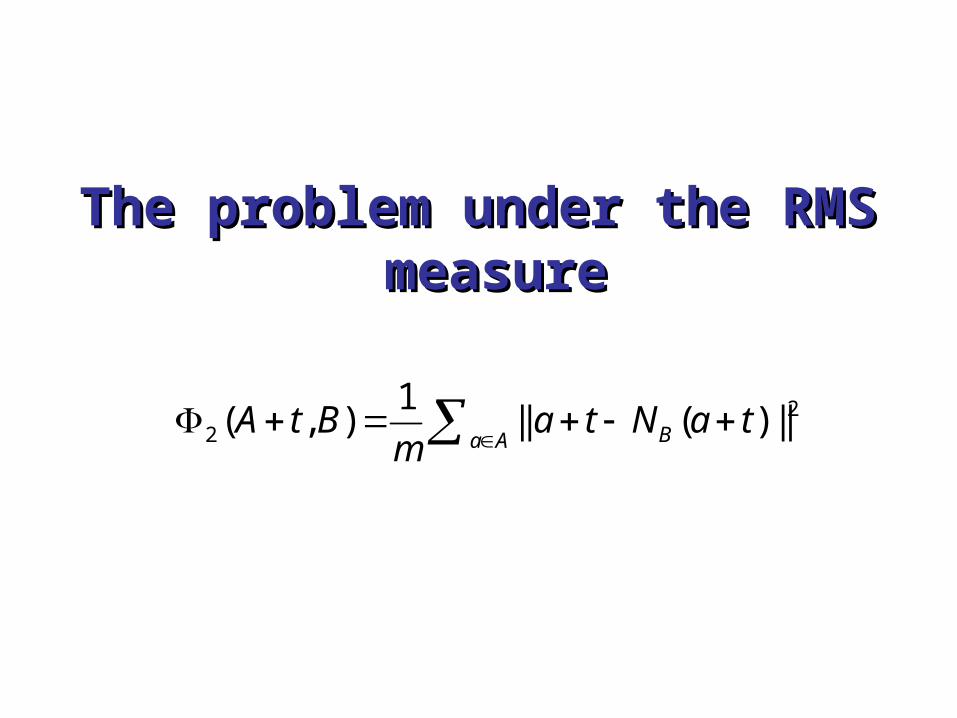
The problem under the RMS The problem under the RMS measuremeasure
22
1( , ) || ( ) ||Ba AA t B a t N a t
m
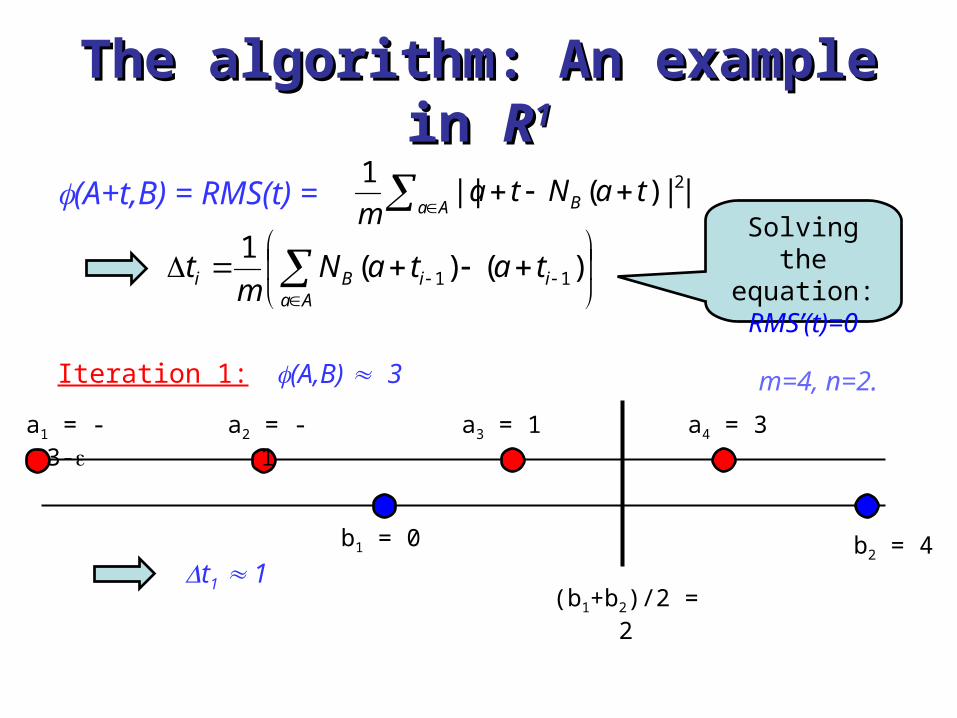
The algorithm: An example in The algorithm: An example in RR11
(A+t,B) = RMS(t) =
Iteration 1:
Aa B taNtam
2||)(||1
b1 = 0 b2 = 4
a3 = 1 a4 = 3a1 = -3-
)()(
111 i
AaiBi tataN
mt
t1 1
m=4, n=2.
(b1+b2)/2 = 2
a2 = -1
(A,B) 3
Solving the equation: RMS’(t)=0
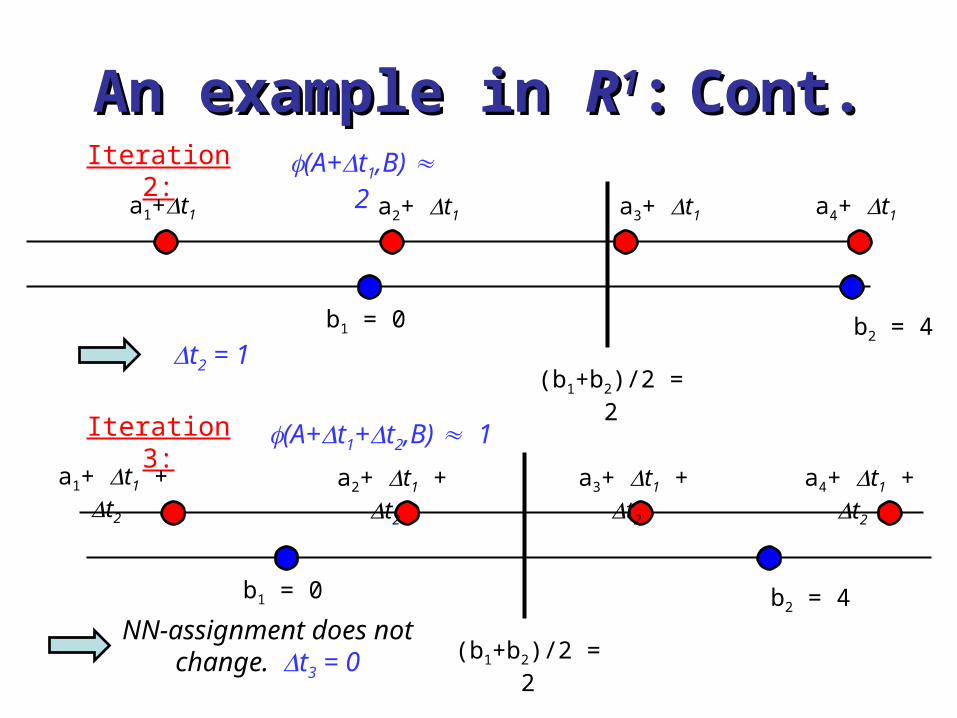
An example in An example in RR11:: Cont.Cont.Iteration 2:
b1 = 0 b2 = 4
a4+ t1
t2 = 1(b1+b2)/2 = 2
a3+ t1 a2+ t1 a1+t1
Iteration 3:
b1 = 0 b2 = 4
NN-assignment does not change. t3 = 0 (b1+b2)/2 = 2
a1+ t1 + t2 a2+ t1 + t2 a3+ t1 + t2 a4+ t1 + t2
(A+t1,B) 2
(A+t1+t2,B) 1
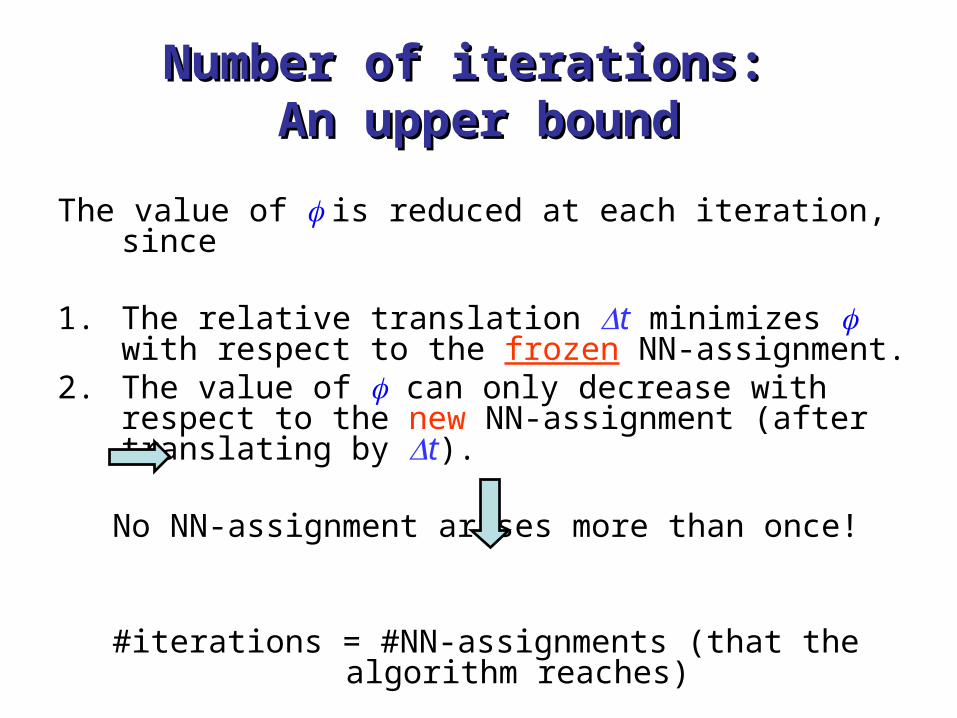
Number of iterations: Number of iterations: An upper boundAn upper bound
The value of is reduced at each iteration, since
1. The relative translation t minimizes with respect to the frozen NN-assignment.
2. The value of can only decrease with respect to the new NN-assignment (after translating by t).
No NN-assignment arises more than once!
#iterations = #NN-assignments (that the algorithm reaches)
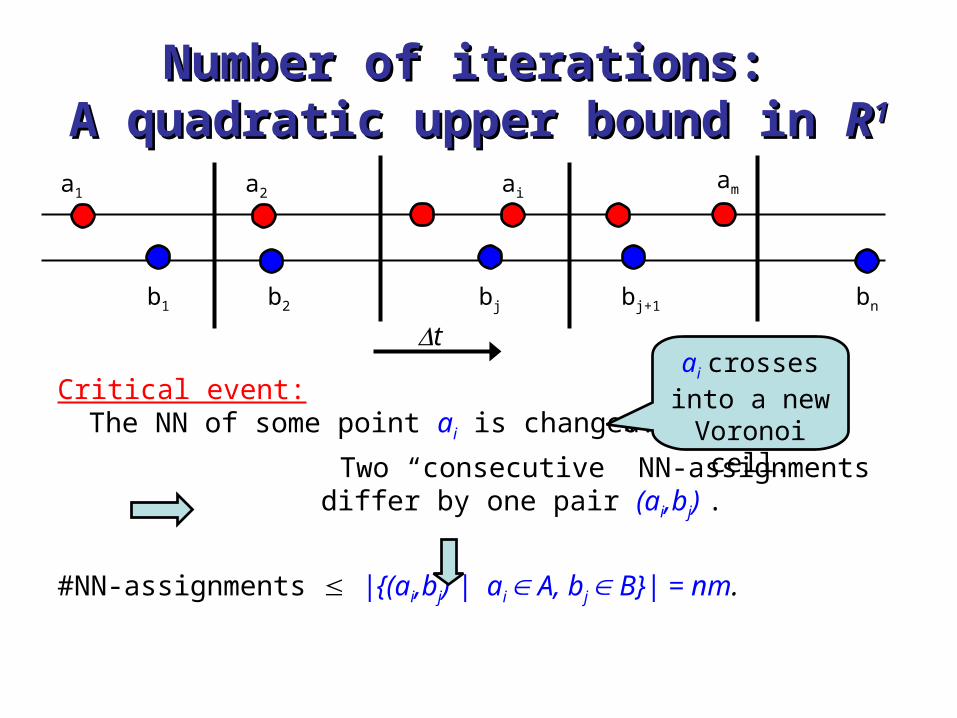
Number of iterations: Number of iterations: A quadratic upper bound in A quadratic upper bound in RR11
Critical event: The NN of some point ai is changed.
Two “consecutive” NN-assignments differ by one pair (ai,bj) .
#NN-assignments |{(ai,bj) | ai A, bj B}| = nm.
b1
a2ama1
b2 bn
ai
bj bj+1
tai crosses into a new
Voronoi cell.
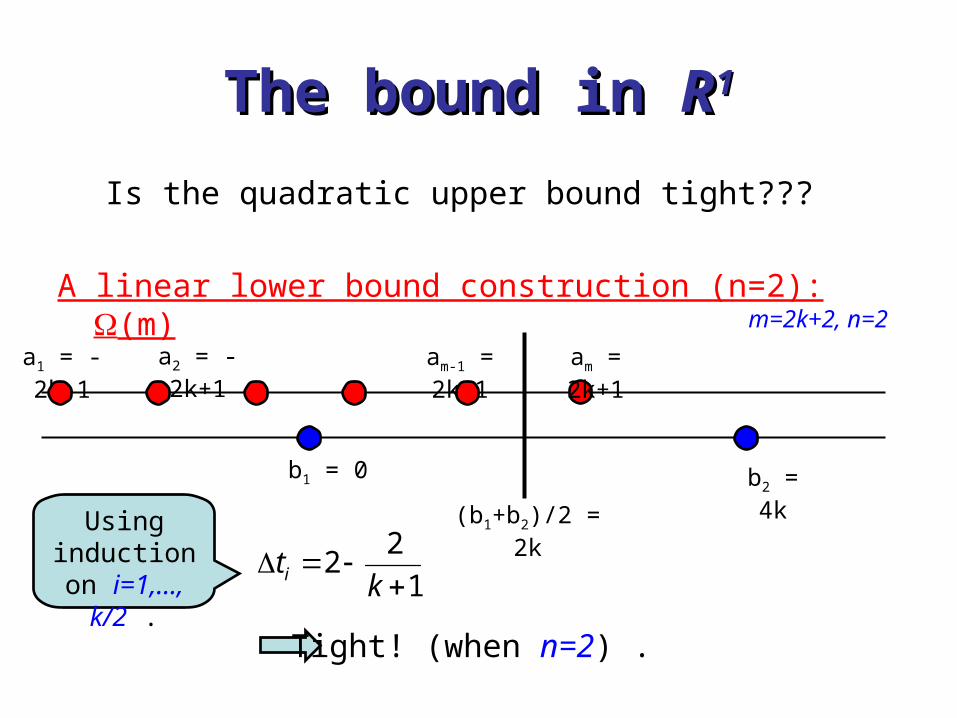
The bound in The bound in RR11
Is the quadratic upper bound tight???
A linear lower bound construction (n=2): (m)
b1 = 0
am-1 = 2k-1 am = 2k+1a1 = -2k-1
(b1+b2)/2 = 2k
Tight! (when n=2) .
b2 = 4k
a2 = -2k+1
Using induction on i=1,…, k/2 . 1
22
k
ti
m=2k+2, n=2

Structural properties in Structural properties in RR11
Lemma:At each iteration i2 of the algorithm
Corollary (Monotonicity):The ICP algorithm always moves A in the same (left or
right) direction.
Either ti 0 for each i0, or ti 0 for each i0.
)()(1
21
iBAa
iBi taNtaNm
t
j
k kj tt1
Use induction on i.
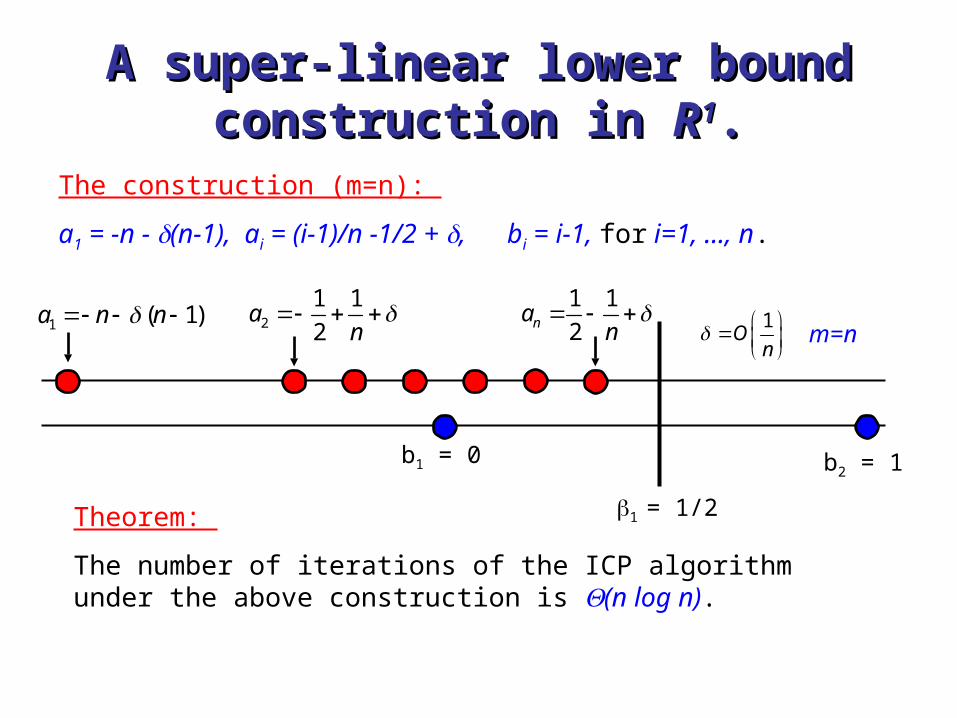
A super-linear lower bound A super-linear lower bound construction in construction in RR11..
2
1 1
2a
n 1 ( 1)a n n
b1 = 0 b2 = 1
1 1
2na n
m=n1
On
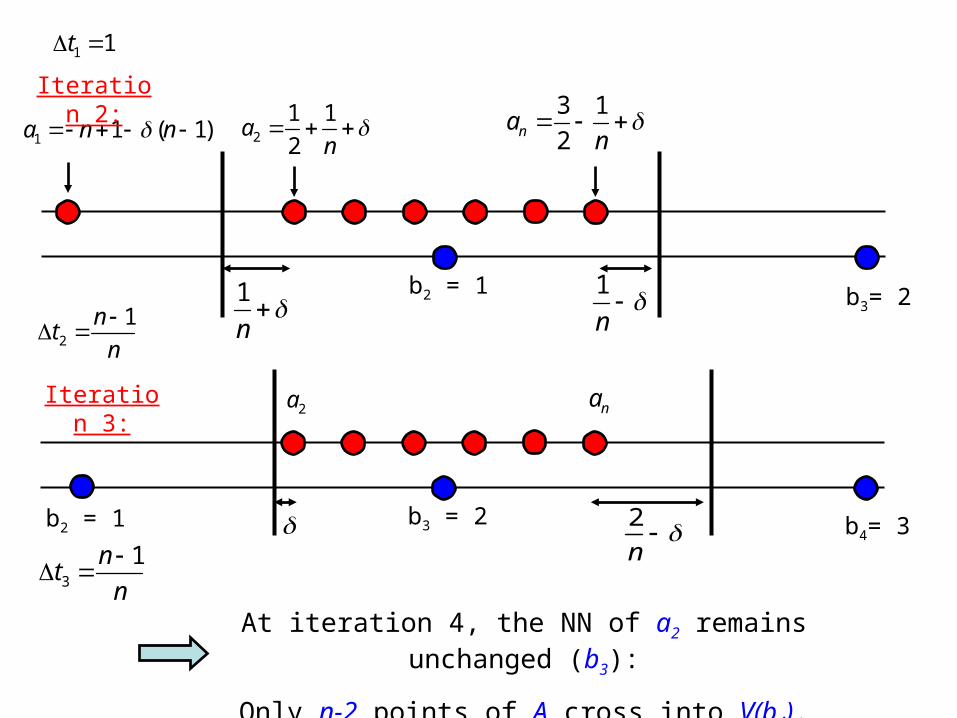
The construction (m=n):
a1 = -n - (n-1), ai = (i-1)/n -1/2 + , bi = i-1, for i=1, …, n.
Theorem:
The number of iterations of the ICP algorithm under the above construction is (n log n).
1 = 1/2
2
1 1
2a
n
3 1
2na n
1 1t
1 1 ( 1)a n n
b2 = 1 b3= 2
2
1nt
n
b3 = 2 b4= 3b2 = 1 2
n
1
n
3
1nt
n
1
n
Iteration 2:
Iteration 3:2a na
At iteration 4, the NN of a2 remains unchanged (b3):
Only n-2 points of A cross into V(b4).
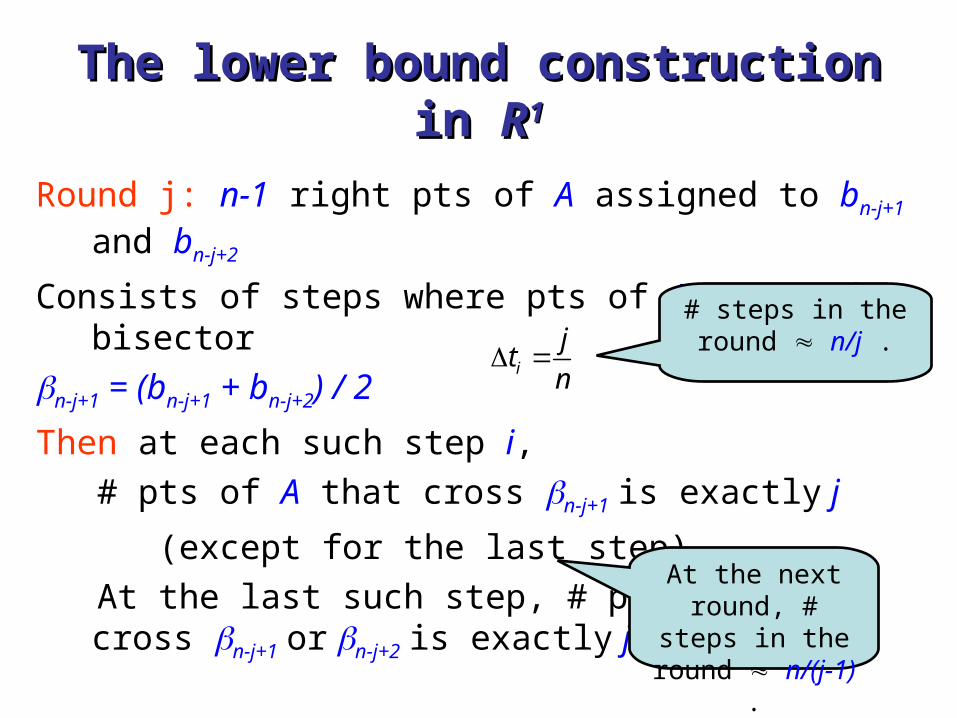
The lower bound construction in The lower bound construction in RR11
Round j: n-1 right pts of A assigned to bn-j+1 and bn-j+2
Consists of steps where pts of A cross the bisector
n-j+1 = (bn-j+1 + bn-j+2) / 2
Then at each such step i,
# pts of A that cross n-j+1 is exactly j
(except for the last step).
At the last such step, # pts of A that cross n-j+1 or n-j+2 is exactly j-1.
i
jt
n
# steps in the round n/j .
At the next round, # steps in the
round n/(j-1) .
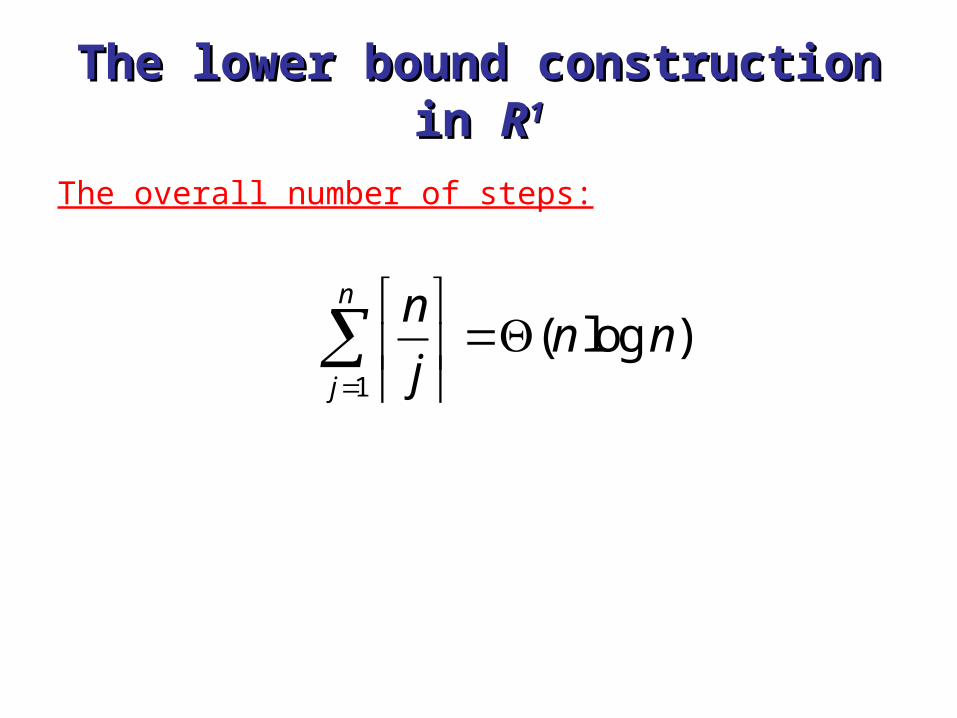
The lower bound construction in The lower bound construction in RR11
The overall number of steps:
1
( log )n
j
nn n
j
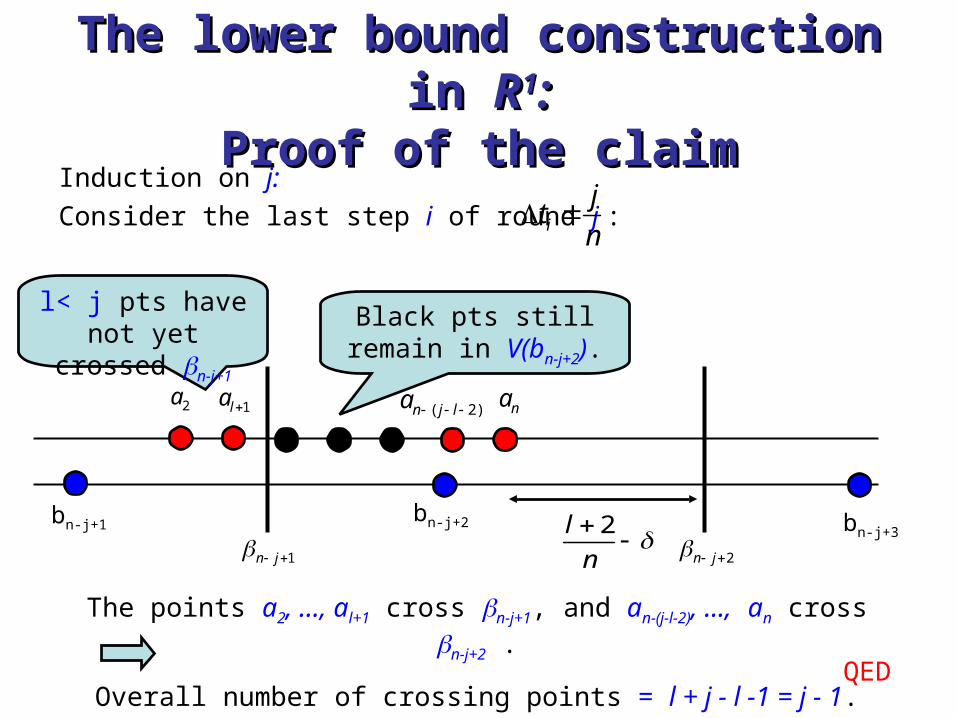
The lower bound construction in The lower bound construction in RR11::Proof of the claimProof of the claim
Induction on j:
Consider the last step i of round j :
( 2)n j la
bn-j+2 bn-j+3bn-j+1 2l
n
2a na1la
i
jt
n
The points a2, …, al+1 cross n-j+1, and an-(j-l-2), …, an cross n-j+2 .
Overall number of crossing points = l + j - l -1 = j - 1.
Black pts still remain in V(bn-j+2).
1n j 2n j
l< j pts have not yet crossed n-j+1
QED
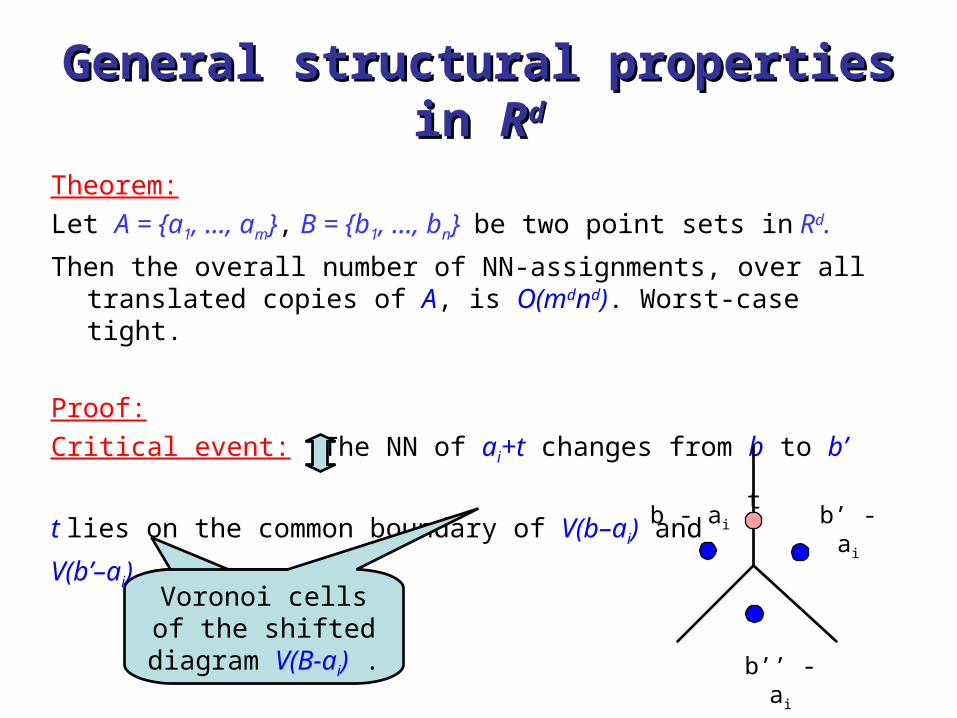
General structural properties in General structural properties in RRdd
Theorem:
Let A = {a1, …, am}, B = {b1, …, bn} be two point sets in Rd.
Then the overall number of NN-assignments, over all translated copies of A, is O(mdnd). Worst-case tight.
Proof:
Critical event: The NN of ai+t changes from b to b’
t lies on the common boundary of V(b–ai) and
V(b’–ai)
Voronoi cells of the shifted diagram
V(B-ai) .
tb - ai b’ - ai
b’’ - ai
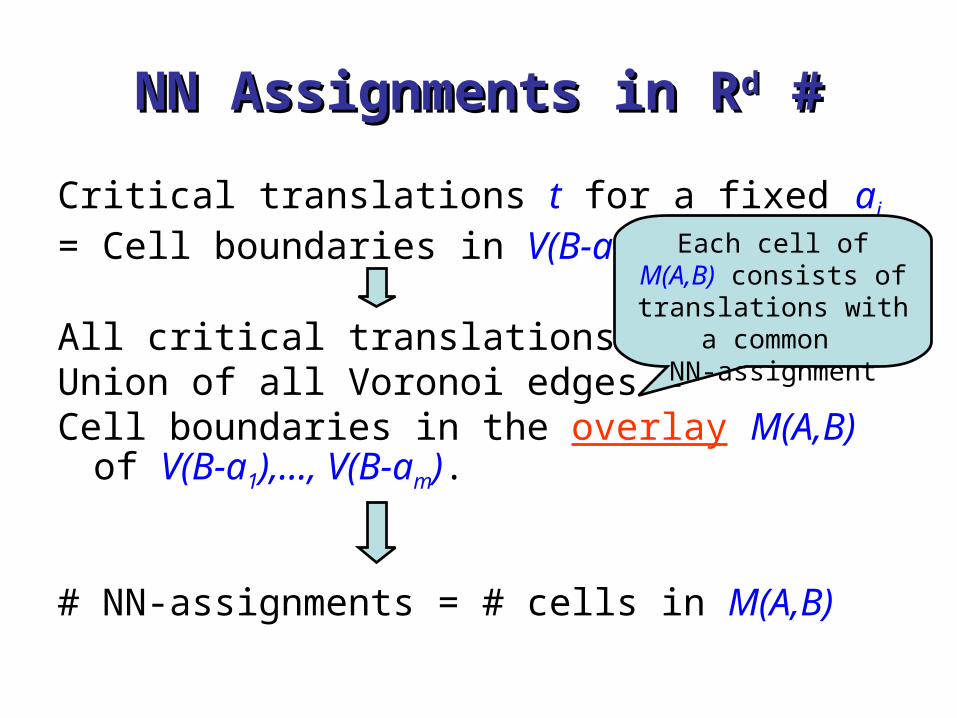
# #NN Assignments in RNN Assignments in Rdd
Critical translations t for a fixed ai
= Cell boundaries in V(B-ai) .
All critical translations = Union of all Voronoi edges = Cell boundaries in the overlay M(A,B)
of V(B-a1),…, V(B-am).
# NN-assignments = # cells in M(A,B)
Each cell of M(A,B) consists of translations
with a common NN-assignment
# NN Assignments in R# NN Assignments in Rdd
Claim:
The overall number of cells of M(A,B) is O(mdnd).
Proof:• Charge each cell of M(A,B) to some vertex v of it
(v is charged at most 2d times).
• v arises as the vertex in the overlay Md of only d diagrams.
• The complexity of Md is O(nd) [Koltun & Sharir 05].
• There are d-tuples of diagrams V(B-a1),…, V(B-ad).
( )dm
O md
QED
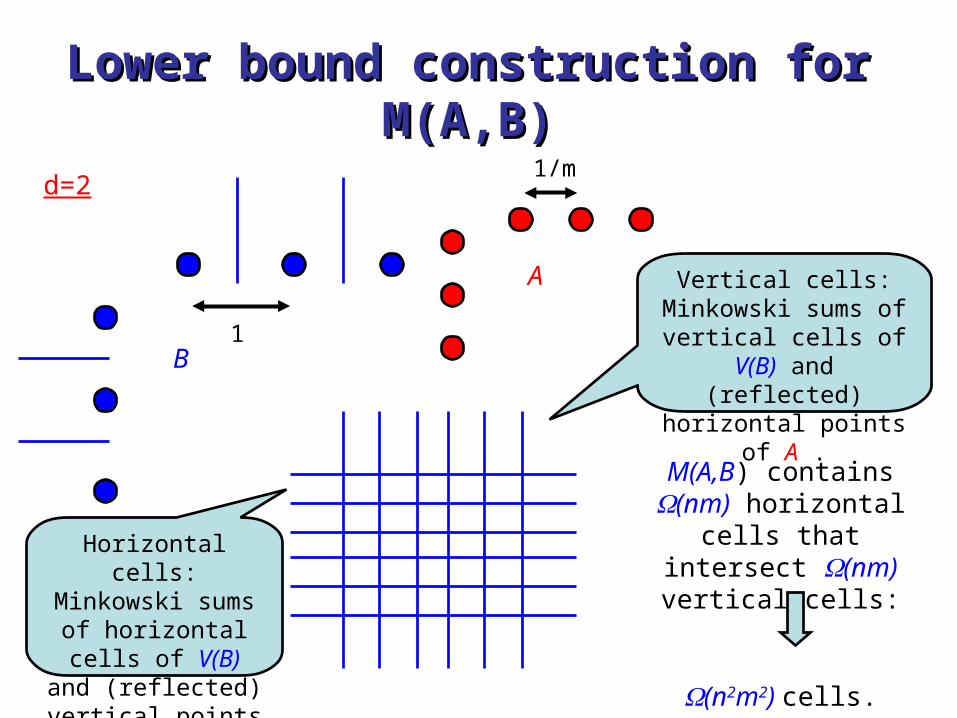
Lower bound construction for M(A,B)Lower bound construction for M(A,B)
B
d=2
A
1/m
1
Horizontal cells: Minkowski sums of horizontal cells of
V(B) and (reflected) vertical points of A .
Vertical cells: Minkowski sums of vertical cells of V(B)
and (reflected) horizontal points of A .
M(A,B) contains (nm) horizontal cells that intersect (nm)
vertical cells:
(n2m2) cells.
# NN Assignments in R# NN Assignments in Rdd
Lower bound construction can be extended to any dimension d
Open problem:
Does the ICP algorithm can step through all (many) NN-assignments in a single execution?
d=1:
Upper bound: O(n2).
Lower bound: (n log n).
Probably no.
MonotonicityMonotonicity
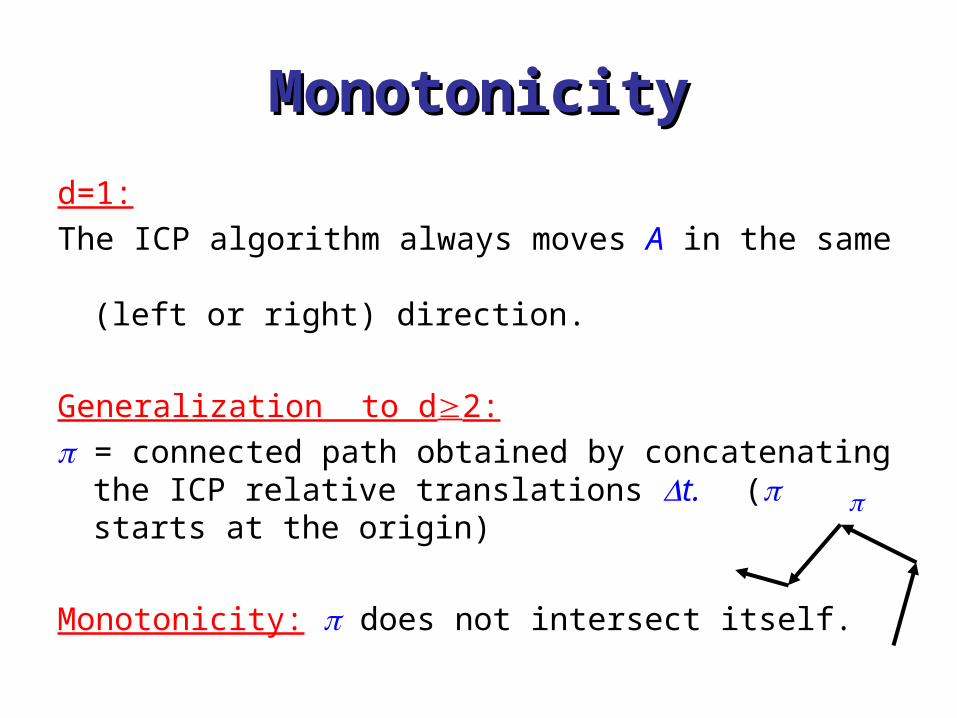
d=1:
The ICP algorithm always moves A in the same (left or right) direction.
Generalization to d2:
= connected path obtained by concatenating the ICP relative translations t. ( starts at the origin)
Monotonicity: does not intersect itself.
MonotonicityMonotonicity
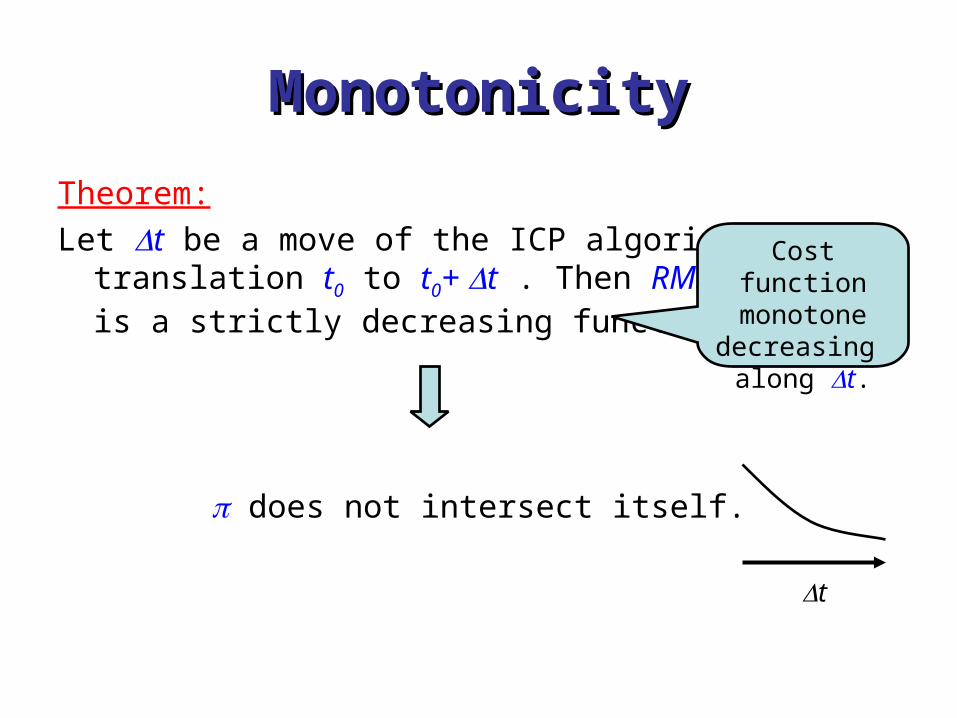
Theorem:
Let t be a move of the ICP algorithm from translation t0 to t0+ t . Then RMS(t0+ t) is a strictly decreasing function of .
does not intersect itself.
Cost function monotone
decreasing along t.
t
Proof of the theoremProof of the theorem
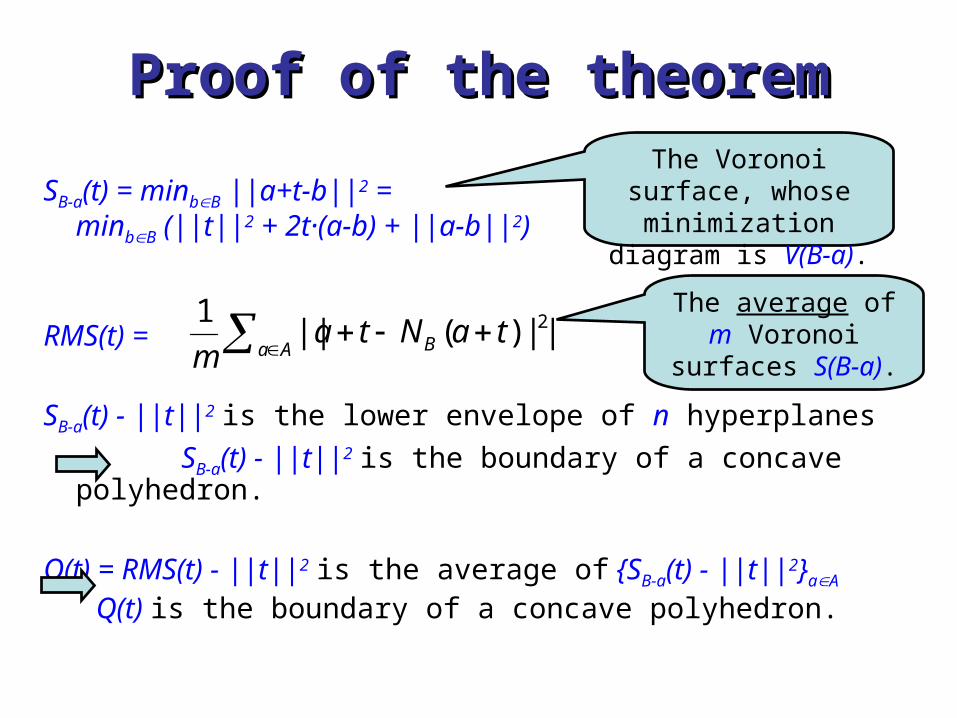
SB-a(t) = minbB ||a+t-b||2 = minbB (||t||2 + 2t·(a-b) + ||a-b||2)
RMS(t) =
SB-a(t) - ||t||2 is the lower envelope of n hyperplanes
SB-a(t) - ||t||2 is the boundary of a concave polyhedron.
Q(t) = RMS(t) - ||t||2 is the average of {SB-a(t) - ||t||2}aA
Q(t) is the boundary of a concave polyhedron.
Aa B taNtam
2||)(||1
The Voronoi surface, whose minimization diagram is V(B-a).
The average of m Voronoi surfaces
S(B-a).
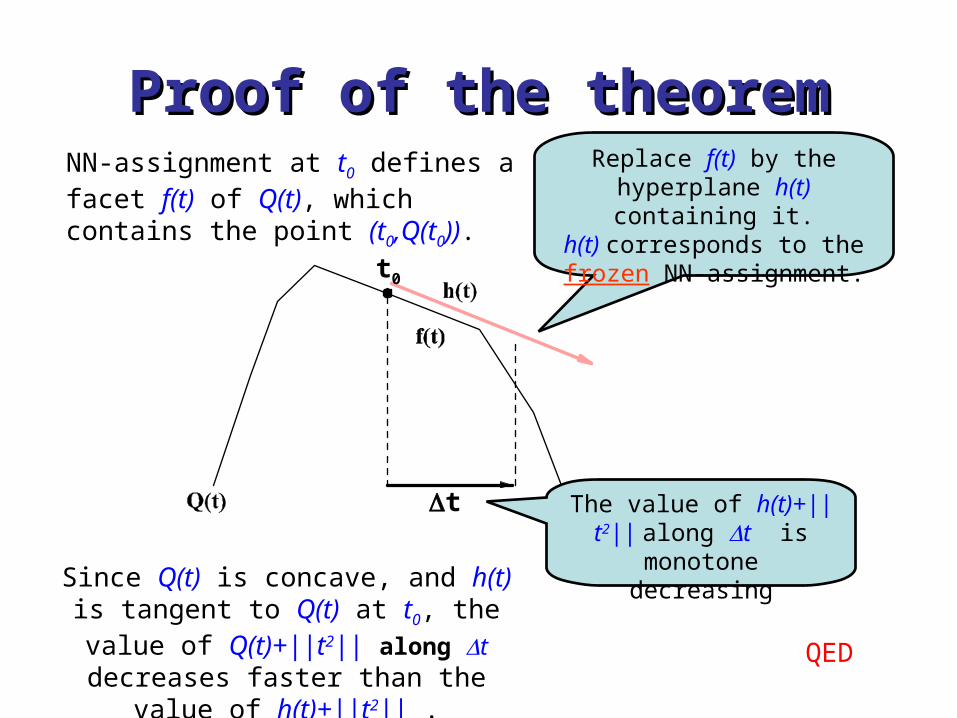
Proof of the theoremProof of the theoremNN-assignment at t0 defines a facet f(t) of Q(t), which contains the point (t0,Q(t0)).
Replace f(t) by the hyperplane h(t) containing it.h(t) corresponds to the frozen
NN-assignment.
The value of h(t)+||t2|| along t is monotone
decreasingSince Q(t) is concave, and h(t) is tangent to Q(t) at t0, the value of Q(t)+||t2|| along
t decreases faster than the value of h(t)+||t2|| .
QED
t0
t
More structural properties of More structural properties of
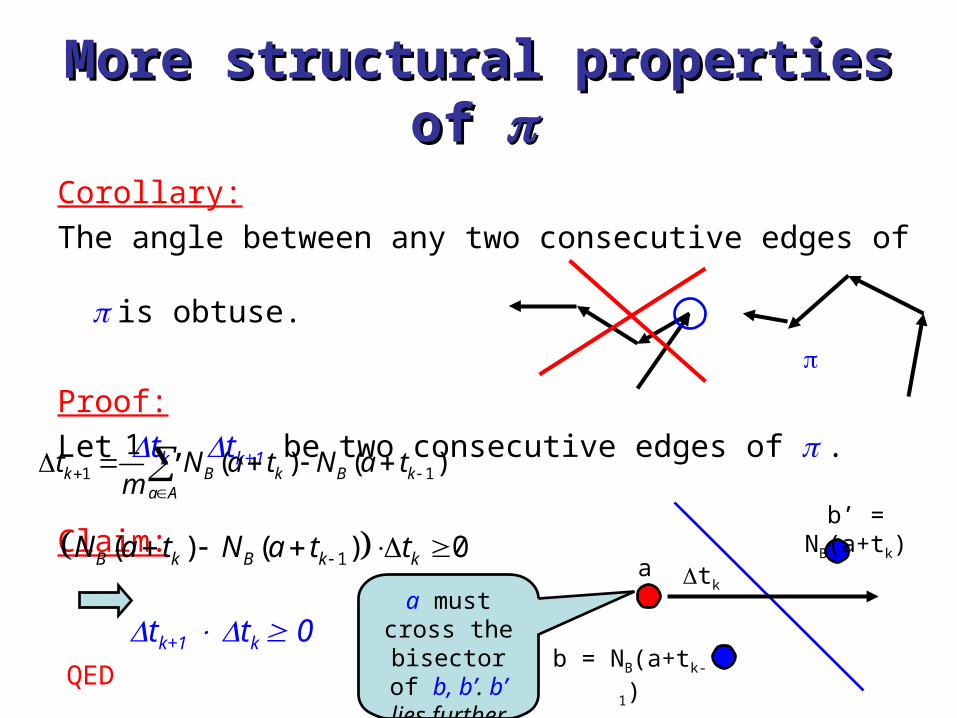
Corollary:
The angle between any two consecutive edges of is obtuse.
Proof:
Let tk, tk+1 be two consecutive edges of .
Claim:
tk+1 tk 0
1 1
1( ) ( )k B k B k
a A
t N a t N a tm
1( ) ( ) 0B k B k kN a t N a t t b’ = NB(a+tk)
a
b = NB(a+tk-1)
tka must cross the bisector
of b, b’. b’ lies further aheadQED
Cauchy-Schwarz
inequality
More structural properties: More structural properties: PotentialPotential
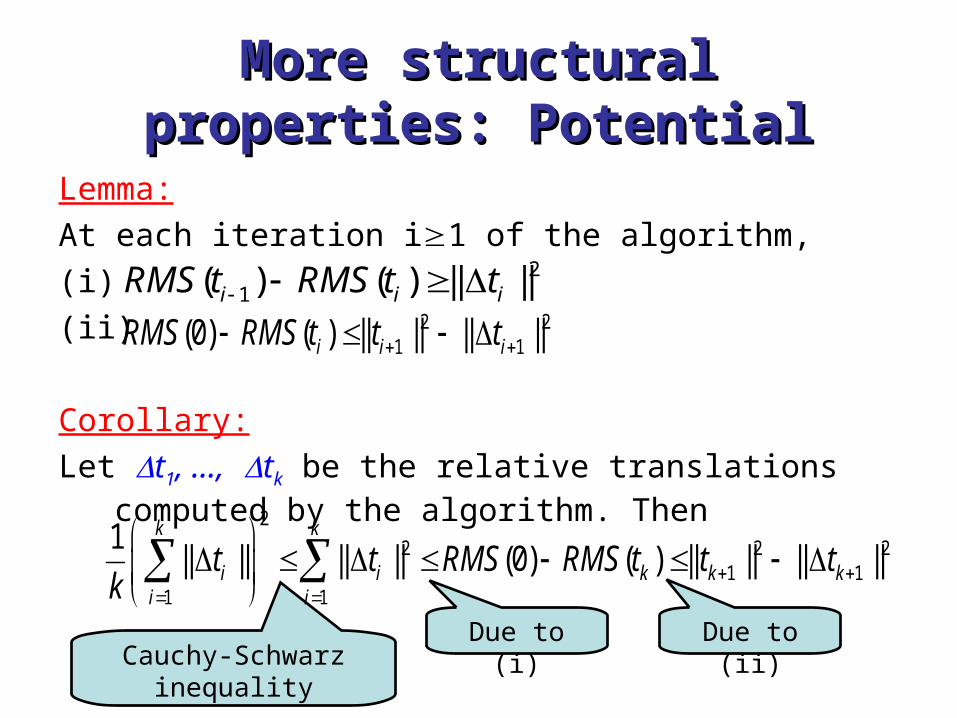
Lemma:
At each iteration i1 of the algorithm,
(i)
(ii)
Corollary:
Let t1, …, tk be the relative translations computed by the algorithm. Then
21( ) ( ) || ||i i iRMS t RMS t t
2 21 1(0) ( ) || || || ||i i iRMS RMS t t t
2
2 2 21 1
1 1
1|| || || || (0) ( ) || || || ||
k k
i i k k ki i
t t RMS RMS t t tk
Due to (i) Due to (ii)
More structural properties: More structural properties: PotentialPotential
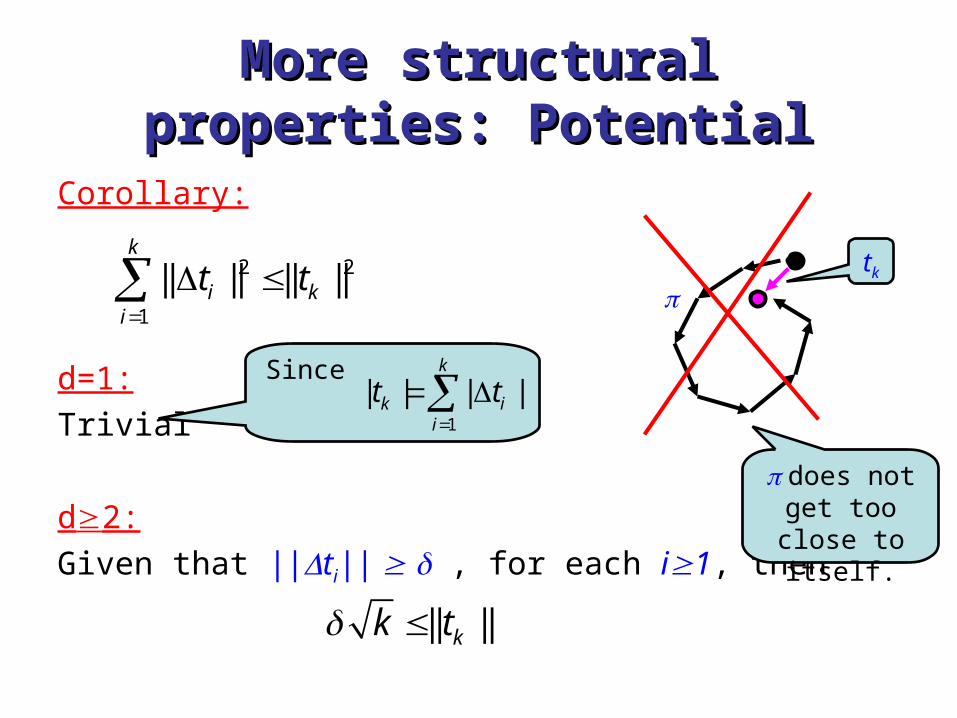
Corollary:
d=1:
Trivial
d2:
Given that ||ti|| , for each i1, then
2 2
1
|| || || ||k
i ki
t t
|| ||kk t
Since
1
| | | |k
k ii
t t
tk
does not get too close
to itself.
The problem under the Hausdorf The problem under the Hausdorf measuremeasure
( , ) max || ( ) ||a A BA t B a t N a t
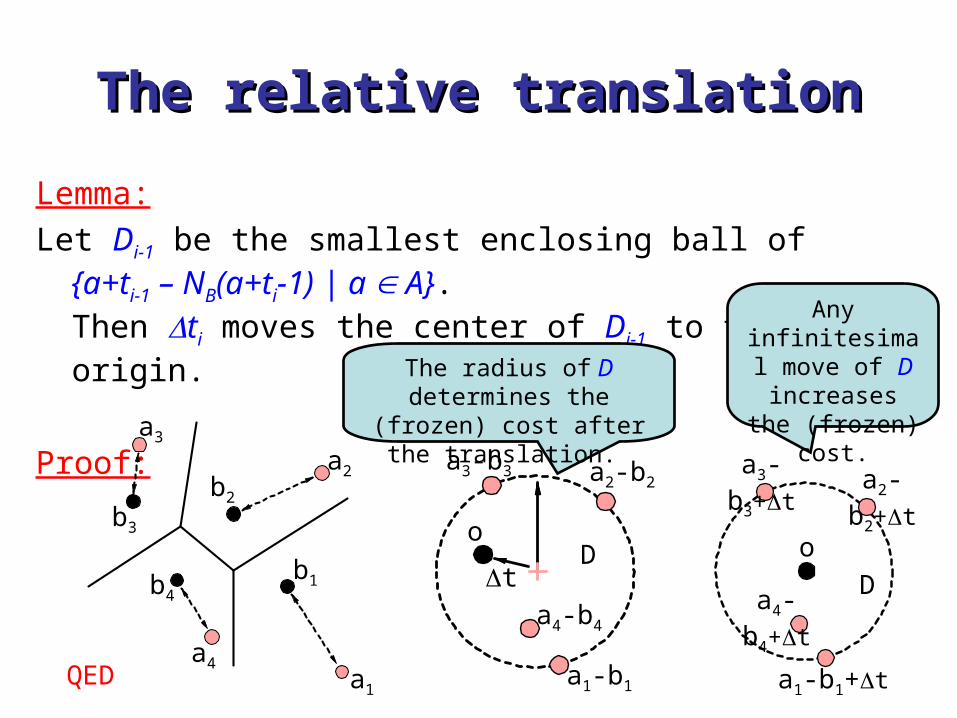
The relative translationThe relative translation
Lemma:
Let Di-1 be the smallest enclosing ball of {a+ti-1 – NB(a+ti-1) | a A}. Then ti moves the center of Di-1 to the origin.
Proof:
t
o
a1
b1
a2b2
a3
b3
a4
b4
a1-b1
a2-b2
a4-b4
a3-b3
a1-b1+t
a2-b2+t
a4-b4+t
a3-b3+t
o
The radius of D determines the (frozen) cost after the
translation.
Any infinitesimal move of D
increases the (frozen) cost.
DD
QED
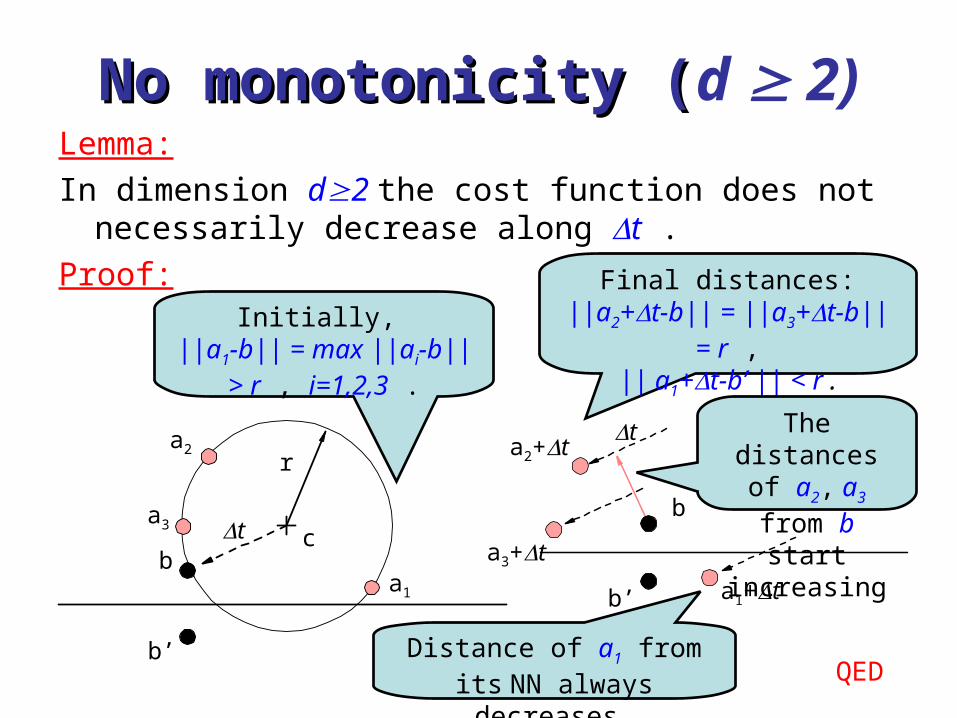
No monotonicity (No monotonicity (d 2)Lemma:
In dimension d2 the cost function does not necessarily decrease along t .
Proof:
a1
a2
a3
b
b’
t
r
c
ta2+t
a3+t
a1+t
b
b’
Initially, ||a1-b|| = max ||ai-b|| > r ,
i=1,2,3 .
Final distances:||a2+t-b|| = ||a3+t-b|| = r ,
|| a1+t-b’ || < r .
The distances of a2, a3 from b start increasing
Distance of a1 from its NN always decreases. QED
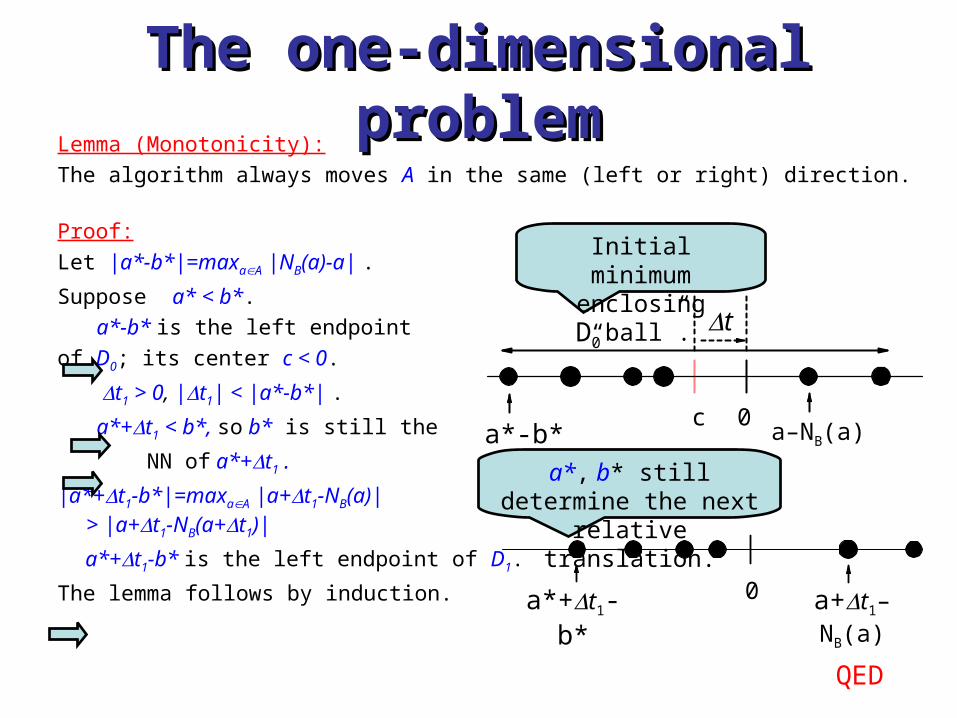
The one-dimensional problemThe one-dimensional problemLemma (Monotonicity):
The algorithm always moves A in the same (left or right) direction.
Proof:
Let |a*-b*|=maxaA |NB(a)-a| .
Suppose a* < b*.
a*-b* is the left endpoint
of D0; its center c < 0.
t1 > 0, |t1| < |a*-b*| .
a*+t1 < b*, so b* is still the
NN of a*+t1 .
|a*+t1-b*|=maxaA |a+t1-NB(a)|> |a+t1-NB(a+t1)|
a*+t1-b* is the left endpoint of D1.
The lemma follows by induction.
a*-b*
tD0
0ca–NB(a)
Initial minimum enclosing “ball”.
0a*+t1-b* a+t1–NB(a)
a*, b* still determine the next relative translation.
QED
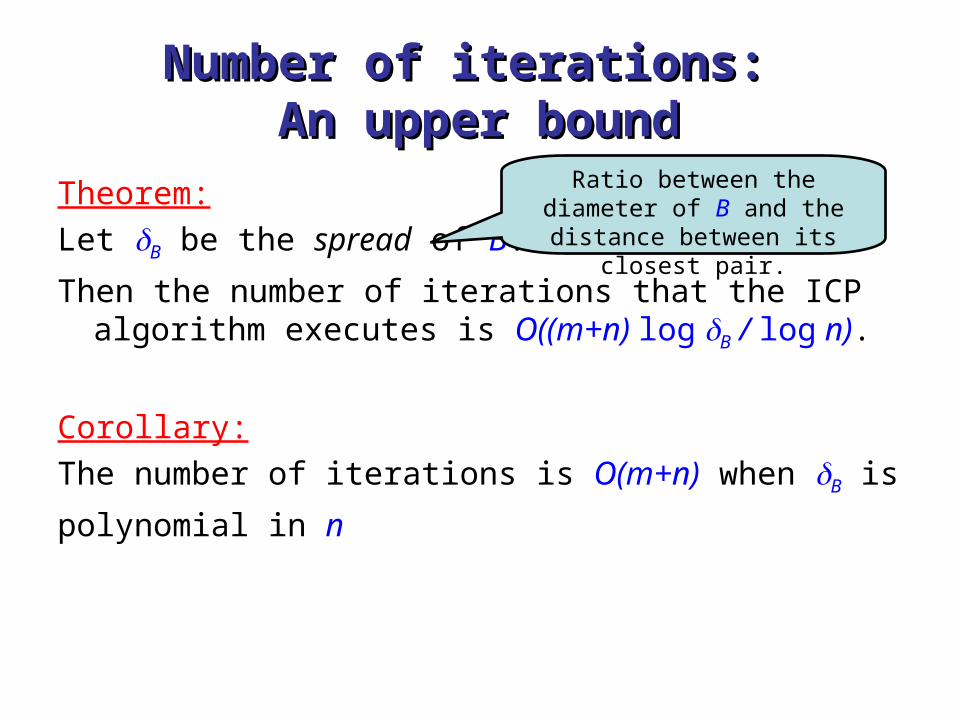
Number of iterations: Number of iterations: An upper boundAn upper bound
Theorem:
Let B be the spread of B.
Then the number of iterations that the ICP algorithm executes is O((m+n) log B / log n).
Corollary:
The number of iterations is O(m+n) when B is
polynomial in n
Ratio between the diameter of B and the distance between its
closest pair.
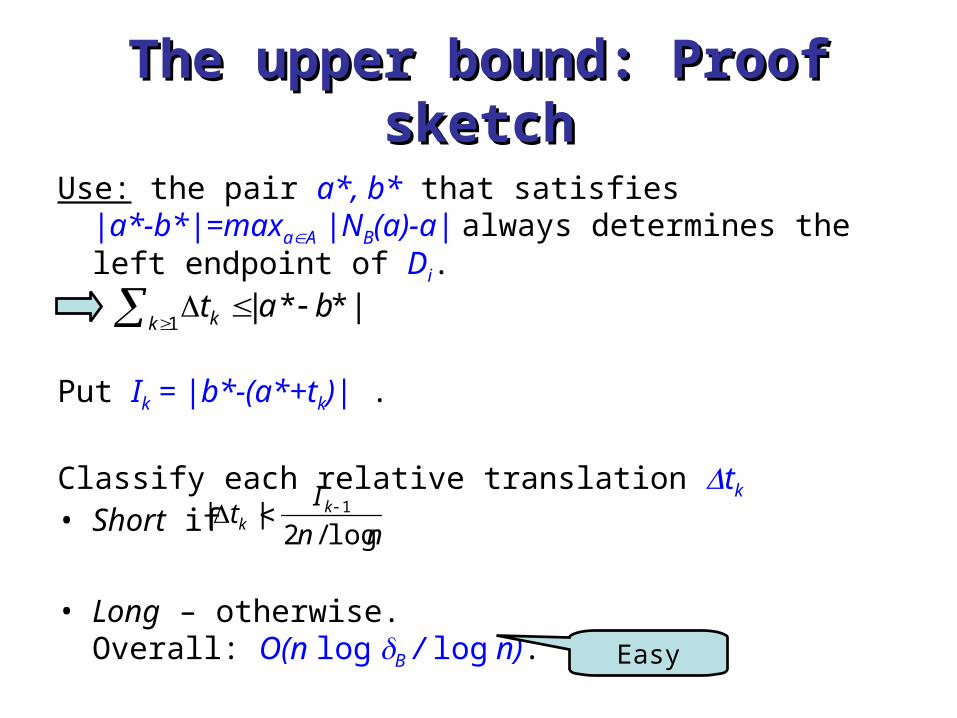
The upper bound: Proof sketchThe upper bound: Proof sketch
Use: the pair a*, b* that satisfies |a*-b*|=maxaA |NB(a)-a| always determines the left endpoint of Di.
Put Ik = |b*-(a*+tk)| .
Classify each relative translation tk
• Short if
• Long – otherwise.Overall: O(n log B / log n).
nn
It kk log/2|| 1
Easy
1|**|
k k bat
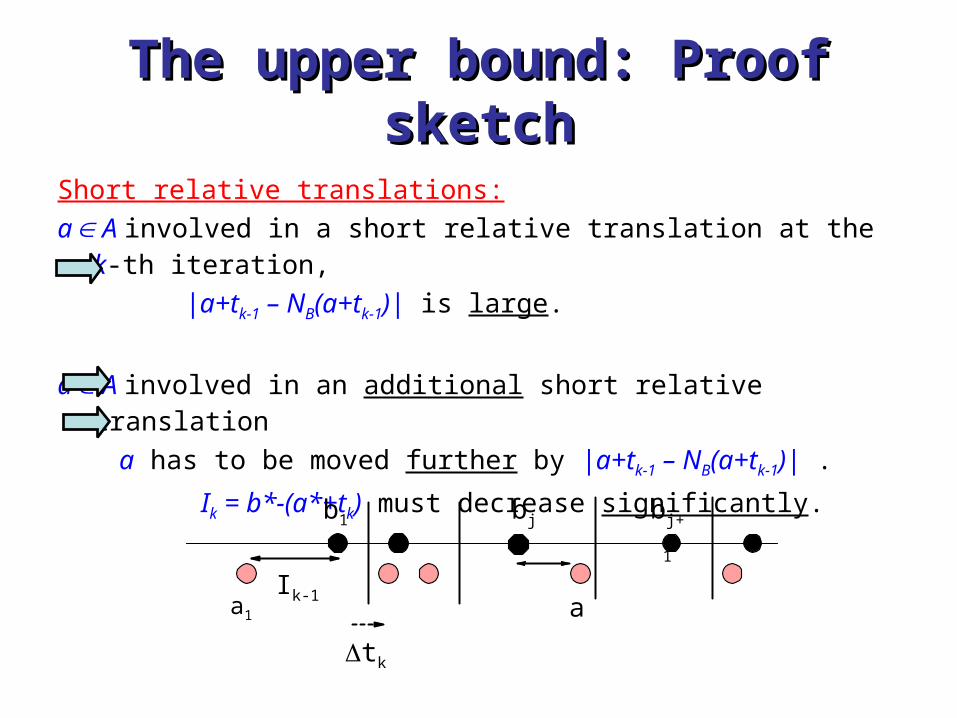
The upper bound: Proof sketchThe upper bound: Proof sketch
Short relative translations:
a A involved in a short relative translation at the k-th iteration,
|a+tk-1 – NB(a+tk-1)| is large.
a A involved in an additional short relative translation
a has to be moved further by |a+tk-1 – NB(a+tk-1)| .
Ik = b*-(a*+tk) must decrease significantly.
b1 bj bj+1
a
tk
Ik-1a1
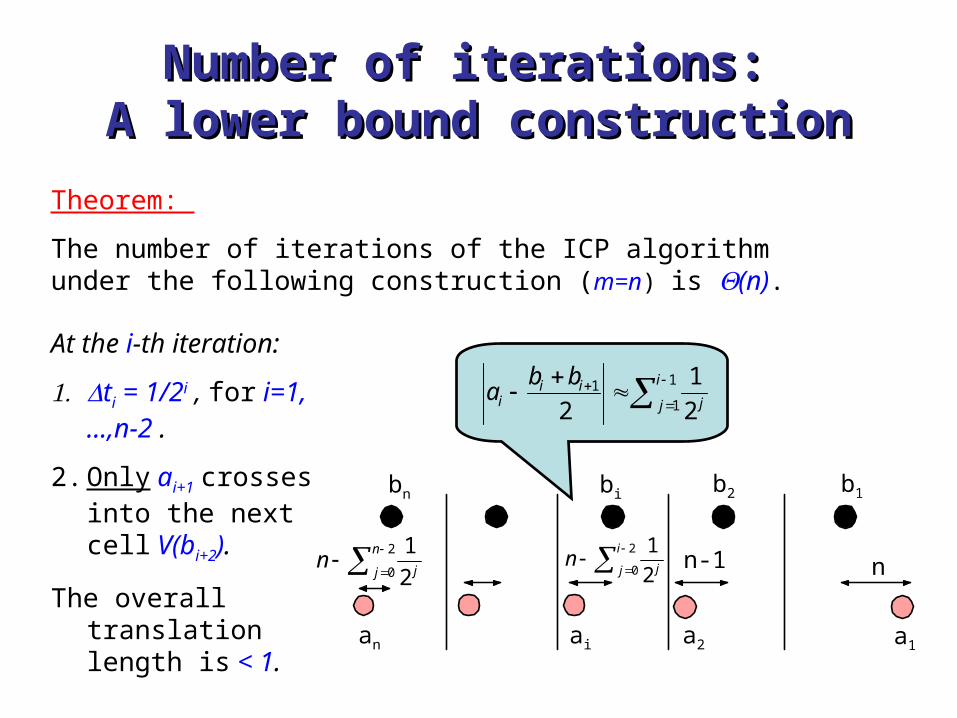
Number of iterations: Number of iterations: A lower bound constructionA lower bound construction
2
0 2
1n
j jn
At the i-th iteration:
1. ti = 1/2i , for i=1,…,n-2 .
2. Only ai+1 crosses into the next cell V(bi+2).
The overall translation length is < 1.
Theorem:
The number of iterations of the ICP algorithm under the following construction (m=n) is (n).
a1a2an
b1b2bn
nn-1
2
0 2
1i
j jn
ai
1
11
2
1
2
i
j jii
i
bba
bi

Many open problems:
• Bounds on # iterations• How many local minima?• Other cost functions• More structural properties• Analyze / improve running time, vs. running time of directly computing minimizing translation And so on…
Related Documents







![arXiv · arXiv:1310.5647v1 [cs.CG] 21 Oct 2013 Union of Random Minkowski Sums and Network Vulnerability Analysis∗ Pankaj K. Agarwal† Sariel Har-Peled‡ Haim Kaplan§ Micha Sharir¶](https://static.cupdf.com/doc/110x72/5f59817337060600d66bb754/arxiv-arxiv13105647v1-cscg-21-oct-2013-union-of-random-minkowski-sums-and-network.jpg)