JURNAL ELKOLIND, SEPTEMBER 2109, VOL.06, N0. 3 72 Abstrak - Perkembangan teknologi saat ini sangat pesat dalam berbagai bidang terlebih di dunia industrialisasi. Teknologi dalam bidang konversi energi saat ini telah berkembang sangat pesat dalam memunculkan berbagai ide- ide kreatif untuk dimanfaatkan dalam bidang industri. Salah satunya boiler, boiler adalah bejana yang digunakan untuk menghasilkan uap air (steam) yang akan digunakan sebagai pemanas atau tenaga penggerak seperti turbin. Salah satu perangkat kontrol modern yang dapat diterapkan dalam berlangsungnya proses produksi di industri saat ini adalah PLC (Programmable Logic Controller) sebagai kontroler dan HMI (Human Machine Interface) sebagai alat untuk memonitoring kinerja sistem secara real time. Dengan berkembangnya sistem kontrol pada suatu industri, maka modul miniplant boiler yang merupakan salah satu peralatan yang ada di indistri ini dapat digunakan sebagai media pembelajaran di laboraturium sebelum masuk ke dunia industri yang sesungguhnya. Pengontrolan suhu pada mini boiler merupakan suatu hal yang sangat penting karena suhu merupakan parameter yang mudah berubah sehingga perlu dilakukan pengontrolan agar suhu dapat tetap stabil pada nilai tertentu terhadap berbagai gangguan sehingga tidak terjadi kegagalan sistem akibat suhu yang terlalu tinggi. Untuk mendapatkan respon sistem yang stabil, diterapkan metode kontrol PID pada sistem. Pada skripsi ini digunakan miniplant boiler dengan ukuran diameter tabung 15 cm dengan panjang 30 cm dan kapasitas 5 L. Suhu yang dikontrol pada tabung adalah 100 °C dengan hasil nilai parameter PID menggunakan metode Ziegler Nichols Sistem Orde 1 diperoleh nilai Kp = 20.03, Ti =120 dan Td = 4,2. Dan dari grafik respon sistem diperoleh karakteristik %error steady state = 0,1 %, time rise (Tr) = 2130 s, time delay (Td) = 900, dan settling time (Ts) = 2370 s. Dari nilai parameter kontrol PID tersebut, menunjukkan respon sistem yang baik dan mampu menjaga suhu sesuai dengan setpoint yang diberikan pada HMI untuk kondisi sistem tanpa diberikan gangguan atau diberikan gangguan Kata Kunci : Boiler, Kontrol suhu ,PLC, HMI.PID. Rizal Braman Setya adalah mahasiswa D4 Teknik Elektronika Politeknik Negeri Malang Muhammad Rifa’I dan Edi Sulistio Budi adalah dosen Jurusan Teknik Elektro Politeknik Negeri Malang I. PENDAHULUAN erkembangan teknologis saat ini sangat pesat dalam berbagai bidang terlebih di dunia industrialisasi. Teknologi dalam bidang konversi energy saat ini telah berkembang sangat pesat dalam memunculkan berbagai ide ide kreatif untuk dimanfaatkan dalam bidang industry. Salah satunya boiler, boiler adalah bejana yang digunakan untuk menghasilkan uap air (steam) yang akan digunakan sebagai pemanas atau tenaga penggerak. Pada industri proses, biasanya terdapat boiler yang dapat menghasilkan steam untuk digunakan mengalirkan panas ke suatu proses. Steam yang dihasilkan oleh boiler ini berasal dari air yang diumpan pada boiler dan kemudian dididihkan. Setelah didihkan dalam temperatur tertentu uap siap dialirkan ke plant, seperti pemanas atau turbin. Dalam proses mengubah air menjadi uap sering terjadi kendala sehingga keluaran tidak sesuai dengan yang dikehendaki, salah satunya temperatur yang terlalu rendah atau terlalu tinggi dari setpoint. Temperatur yang tidak sesuai dengan setpoint akan menyebabkan banyak masalah seperti terjadinya overpressure dan overheat yang menyababkan tekanan uap tidak sesuai dengan spesifikasi yang diinginkan. Selain itu kegagalan dalam proses pengontrolan juga dapat mengakibatkan kegagalan sistem yang bisa berakibat fatal, seperti rusaknya bejana karena temperature yang tidak dikontrol dengan baik bahkan bisa menyebabkan terjadinya ledakan karena bejana tidak kuat menahan tekanan yang dihasilkan. Berawal dari kondisi diatas, skripsi ini bertujuan untuk membuat sebuah modul miniplant boiler yang dapat digunakan sebagai media pembelajaran di Laboratorium Teknik Elektronika untuk mengimplementasikan cara meminimalisir sistem failure dan menjaga kondisi sistem agar tetap berada pada kondisi yang diinginkan dalam bentuk sebuah miniplant boiler. Modul miniplant boiler ini menggunakan PLC (Programmable Logic Controller) S7-200 CPU224 sebagai kontroler dan HMI (Human Machine Interface) Omron NB7W-TW000B sebagai alat untuk memonitoring kinerja sistem secara real time serta menggunakan metode kontrol PID. Kontrol PID digunakan karena kontrol PID merupakan jenis kontrol yang secara umum banyak digunakan di industri dan memiliki karakteristik respon yang cepat dan stabil sehingga dapat digunkanan untuk mengontrol suhu agar tetap terjaga sesuai dengan setpoint yang diinginkan [2]. Tujuan pada skripsi ini adalah dapat menjaga suhu boiler tetap pada suhu 100 O C. Modul Sistem Pengaturan Suhu Mini Boiler Dengan Metode PID Menggunakan PLC dan HMI Rizal Braman Setya , Muhammad Rifa’I, Edi Sulistio Budi P

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
JURNAL ELKOLIND, SEPTEMBER 2109, VOL.06, N0. 3
72
Abstrak - Perkembangan teknologi saat ini sangat pesat
dalam berbagai bidang terlebih di dunia industrialisasi.
Teknologi dalam bidang konversi energi saat ini telah
berkembang sangat pesat dalam memunculkan berbagai ide-
ide kreatif untuk dimanfaatkan dalam bidang industri. Salah
satunya boiler, boiler adalah bejana yang digunakan untuk
menghasilkan uap air (steam) yang akan digunakan sebagai
pemanas atau tenaga penggerak seperti turbin. Salah satu
perangkat kontrol modern yang dapat diterapkan dalam
berlangsungnya proses produksi di industri saat ini adalah
PLC (Programmable Logic Controller) sebagai kontroler dan
HMI (Human Machine Interface) sebagai alat untuk
memonitoring kinerja sistem secara real time. Dengan
berkembangnya sistem kontrol pada suatu industri, maka
modul miniplant boiler yang merupakan salah satu peralatan
yang ada di indistri ini dapat digunakan sebagai media
pembelajaran di laboraturium sebelum masuk ke dunia
industri yang sesungguhnya. Pengontrolan suhu pada mini
boiler merupakan suatu hal yang sangat penting karena suhu
merupakan parameter yang mudah berubah sehingga perlu
dilakukan pengontrolan agar suhu dapat tetap stabil pada nilai
tertentu terhadap berbagai gangguan sehingga tidak terjadi
kegagalan sistem akibat suhu yang terlalu tinggi. Untuk
mendapatkan respon sistem yang stabil, diterapkan metode
kontrol PID pada sistem. Pada skripsi ini digunakan miniplant
boiler dengan ukuran diameter tabung 15 cm dengan panjang
30 cm dan kapasitas 5 L. Suhu yang dikontrol pada tabung
adalah 100 °C dengan hasil nilai parameter PID menggunakan
metode Ziegler Nichols Sistem Orde 1 diperoleh nilai Kp =
20.03, Ti =120 dan Td = 4,2. Dan dari grafik respon sistem
diperoleh karakteristik %error steady state = 0,1 %, time rise
(Tr) = 2130 s, time delay (Td) = 900, dan settling time (Ts) =
2370 s. Dari nilai parameter kontrol PID tersebut,
menunjukkan respon sistem yang baik dan mampu menjaga
suhu sesuai dengan setpoint yang diberikan pada HMI untuk
kondisi sistem tanpa diberikan gangguan atau diberikan
gangguan
Kata Kunci : Boiler, Kontrol suhu ,PLC, HMI.PID.
Rizal Braman Setya adalah mahasiswa D4 Teknik Elektronika Politeknik
Negeri Malang
Muhammad Rifa’I dan Edi Sulistio Budi adalah dosen Jurusan Teknik
Elektro Politeknik Negeri Malang
I. PENDAHULUAN
erkembangan teknologis saat ini sangat pesat dalam
berbagai bidang terlebih di dunia industrialisasi.
Teknologi dalam bidang konversi energy saat ini telah
berkembang sangat pesat dalam memunculkan berbagai ide
ide kreatif untuk dimanfaatkan dalam bidang industry. Salah
satunya boiler, boiler adalah bejana yang digunakan untuk
menghasilkan uap air (steam) yang akan digunakan sebagai
pemanas atau tenaga penggerak. Pada industri proses,
biasanya terdapat boiler yang dapat menghasilkan steam untuk
digunakan mengalirkan panas ke suatu proses. Steam yang
dihasilkan oleh boiler ini berasal dari air yang diumpan pada
boiler dan kemudian dididihkan. Setelah didihkan dalam
temperatur tertentu uap siap dialirkan ke plant, seperti
pemanas atau turbin. Dalam proses mengubah air menjadi uap
sering terjadi kendala sehingga keluaran tidak sesuai dengan
yang dikehendaki, salah satunya temperatur yang terlalu
rendah atau terlalu tinggi dari setpoint.
Temperatur yang tidak sesuai dengan setpoint akan
menyebabkan banyak masalah seperti terjadinya overpressure
dan overheat yang menyababkan tekanan uap tidak sesuai
dengan spesifikasi yang diinginkan. Selain itu kegagalan
dalam proses pengontrolan juga dapat mengakibatkan
kegagalan sistem yang bisa berakibat fatal, seperti rusaknya
bejana karena temperature yang tidak dikontrol dengan baik
bahkan bisa menyebabkan terjadinya ledakan karena bejana
tidak kuat menahan tekanan yang dihasilkan.
Berawal dari kondisi diatas, skripsi ini bertujuan untuk
membuat sebuah modul miniplant boiler yang dapat
digunakan sebagai media pembelajaran di Laboratorium
Teknik Elektronika untuk mengimplementasikan cara
meminimalisir sistem failure dan menjaga kondisi sistem agar
tetap berada pada kondisi yang diinginkan dalam bentuk
sebuah miniplant boiler. Modul miniplant boiler ini
menggunakan PLC (Programmable Logic Controller) S7-200
CPU224 sebagai kontroler dan HMI (Human Machine
Interface) Omron NB7W-TW000B sebagai alat untuk
memonitoring kinerja sistem secara real time serta
menggunakan metode kontrol PID. Kontrol PID digunakan
karena kontrol PID merupakan jenis kontrol yang secara
umum banyak digunakan di industri dan memiliki
karakteristik respon yang cepat dan stabil sehingga dapat
digunkanan untuk mengontrol suhu agar tetap terjaga sesuai
dengan setpoint yang diinginkan [2]. Tujuan pada skripsi ini
adalah dapat menjaga suhu boiler tetap pada suhu 100 OC.
Modul Sistem Pengaturan Suhu Mini Boiler Dengan
Metode PID Menggunakan PLC dan HMI
Rizal Braman Setya , Muhammad Rifa’I, Edi Sulistio Budi
P
JURNAL ELKOLIND, SEPTEMBER 2109, VOL.06, N0. 3
73
II. TINJAUAN PUSTAKA
2.1 Boiler
Boiler/ketel uap merupakan bejana tertutup dimana panas
pembakaran dialirkan ke air sampai terbentuk uap air panas
atau steam. Air adalah media yang berguna dan murah untuk
mengalirkan panas ke suatu proses. Air panas atau steam pada
tekanan dan suhu tertentu mempunyai nilai energi yang
kemudian digunakan untuk mengalirkan panas dalam bentuk
energi kalor ke suatu proses. Jika air didihkan sampai menjadi
steam, maka volumenya akan meningkat sekitar 1600 kali,
menghasilkan tenaga yang besar dan mudah meledak,
sehingga sistem boiler merupakan peralatan yang harus
dikelola dan dijaga dengan sangat baik [6].
2.2 PLC Siemens S7-200
Berdasarkan namanya konsep PLC adalah
Programmable yang menunjukkan kemampuan dalam hal
memori untuk menyimpan program yang telah dibuat yang
dengan mudah diubah-ubah fungsi atau kegunaanya. Logic
yang menunjukkan kemampuan dalam memproses input
secara aritmatik dan logic (ALU), yang melakukan operasi
membandingkan, menjumlahkan, mengalikan, membagi,
mengurangi, negasi, AND, OR, dan lain sebagainya. Dan
Controller yang menunjukkan kemampuan dalam mengontrol
dan mengatur proses sehingga menghasilkan output yang
diinginkan [7]. Secara umum PLC adalah komputer elektronik
yang memiliki fungsi kendali untuk melakukan kontrol proses
yang berupa regulasi variabel secara berkesinambungan
seperti sistem analog atau hanya melibatkan kontrol dua
keadaan (on/off) [5].
PLC yang digunakan pada penelitian ini adalah PLC
Siemens S7-200. Siemens S7-200 merupakan PLC jenis
modular, dimana bagian-bagian PLC dibagi menjadi modul-
modul yang masing-masing memiliki fungsi berbeda. Pada
penelitian ini digunakan modul CPU 224 dengan tambahan
modul analog input EM231 dan modul analog output EM232.
Bentuk CPU 224 dapat dilihat pada Gambar 1. CPU 224 dan
modul analog I/O memiliki karakteristik umum:
a. Sumber tegangan DC 24 Volt.
b. 24 port input dan output digital, dengan 2 output PWM
c. 4 input analog dan 2 output analog
Gambar 1. PLC Siemens S7-200 CPU224 [3]
2.3 HMI Omron NB7W-TW000B
Human Machine Interface (HMI) merupakan suatu
perangkat elektronik yang berfungsi untuk menghubungkan
manusia dengan mesin sebagai alat pemantauan dan
pemberian kontrol kerja dari PLC. Tugas dari Human Machine
Interface (HMI) yaitu membuat visualisasi sistem secara nyata
sehingga mempermudah operator memonitor serta
mengendalikan langsung secara real time terhadap proses
yang sedang berlangsung. Selain itu, HMI dapat menunjukkan
kesalahan mesin, status mesin, dan memudahkan operator
dalam menjalankan atau menghentikan kerja mesin. Gambar 2
menunjukkan HMI Omron NB7W-TW000B yang digunakan
pada skripsi ini.
Gambar 2. HMI Omron NB7W-TW000B
2.4 Sensor Suhu PT100
PT100 merupakan salah satu jenis sensor suhu yang
termasuk golongan RTD (Resistance Temperature Detector)
dengan koefisien suhu positif, yang berarti nilai resistansinya
naik seiring dengan naiknya suhu. Disebut PT100 karena
sensor ini terbuat dari platinum “PT” dan dikalibrasi pada
suhu 0 °C pada nilai resistansi 100 Ω [8]. Bentuk fisik sensor
suhu PT100 dapat dilihat pada Gambar 3
Gambar 3. Sensor Suhu PT100
2.5 Heater
Heater atau Elemen pemanas merupakan piranti yang
mengubah energi listrik menjadi energi panas melalui proses
Joule Heating. Prinsip kerja elemen panas adalah dengan
memberikan sumber tegangan AC pada heater sehingga arus
listrik dapat mengalir pada elemen lilitan kawat kawat
(resistance wire) yang dilapisi pipa logam sehingga dapat
menghasilkan panas pada elemen. Bentuk fisik Heater dapat
dilihat pada Gambar 4.
Gambar 4. Immersion Heater
JURNAL ELKOLIND, SEPTEMBER 2109, VOL.06, N0. 3
74
2.6 Sensor Level
Sensor level yang digunakan adalah sensor pasif berupa
empat buah besi alumunium yang memiliki luas sama namun
dengan panjang berbeda yang akan dideteksi perubahan
resistansinya saat ada di dalam air oleh kontroler. Sehingga
perubahan resistansi akan menyebabkan perubahan tegangan
pada kontroler yang dapat dimanfaatkan untuk mendeteksi
ketinggian air pada tangki boiler. Gambar 5 menunjukkan
contoh sensor level elektroda yang digunakan pada skripsi ini.
Gambar 5 Contoh Sensor Level Elektroda
2.7 Pompa Air
Pompa air DC pada skripsi ini berfungsi untuk
memasukkan air kedalam tabung boiler dari tabung preheater
yang selanjutnya dipanaskan pada suhu tertentu sesuai dengan
setpoint yang ditentukan. Pompa air yang dipilih harus
memiliki torsi yang kuat karena air dialirkan menuju boiler
yang memiliki tekanan balik. Sehingga tekanan input pompa
harus lebih besar dari tekanan output pompa agar air tidak
kembali ke tangki penampungan. Bentuk fisik Pompa Air DC
dapat dilihat pada Gambar 6.
Gambar 6. Pompa Air DC
2.8 Kontrol PID (Proportional, Integral Derivative)
Sistem Kontrol PID (Proportional – Integral –
Derivative controller) merupakan kontroler untuk menentukan
presisi suatu sistem instrumentasi dengan karakteristik adanya
umpan balik pada system tesebut (Feedback). Sistem control
PID terdiri dari tiga buah cara pengaturanya itu kontrol P
(Proportional), D (Derivative) dan I (Integral), dengan masing
– masing memiliki kelebihan dan kekurangan. Dalam
implementasinya masing – masing cara dapat bekerja sendiri
maupun gabungan diantaranya. Dalam perancangan system
kontrol PID yang perlu dilakukan adalah mengatur parameter
P, I atau D agar tanggapan sinyal keluaran sistem terhadap
masukan tertentu sesuai dengan yang diinginkan . Perhitungan
kontrol PID seperti pada persamaan 1 berikut :
Dan penyetelan parameter PID menggunakan metode
Ziegler Nichols Orde 1 atau kurva reaksi ditunjukkan seperti
pada Tabel 1.
Tabel 1. Penyetelan Paramater PID dengan Metode Kurva Reaksi
III. METODOLOGI
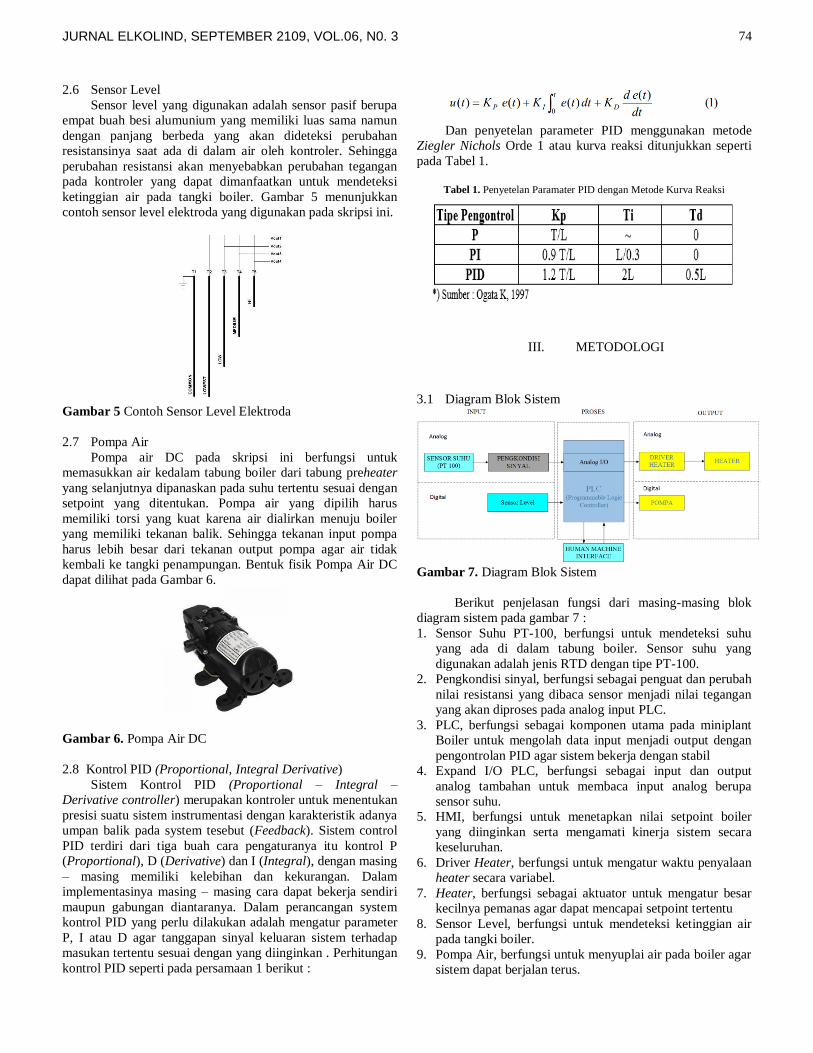
3.1 Diagram Blok Sistem
Gambar 7. Diagram Blok Sistem
Berikut penjelasan fungsi dari masing-masing blok
diagram sistem pada gambar 7 :
1. Sensor Suhu PT-100, berfungsi untuk mendeteksi suhu
yang ada di dalam tabung boiler. Sensor suhu yang
digunakan adalah jenis RTD dengan tipe PT-100.
2. Pengkondisi sinyal, berfungsi sebagai penguat dan perubah
nilai resistansi yang dibaca sensor menjadi nilai tegangan
yang akan diproses pada analog input PLC.
3. PLC, berfungsi sebagai komponen utama pada miniplant
Boiler untuk mengolah data input menjadi output dengan
pengontrolan PID agar sistem bekerja dengan stabil
4. Expand I/O PLC, berfungsi sebagai input dan output
analog tambahan untuk membaca input analog berupa
sensor suhu.
5. HMI, berfungsi untuk menetapkan nilai setpoint boiler
yang diinginkan serta mengamati kinerja sistem secara
keseluruhan.
6. Driver Heater, berfungsi untuk mengatur waktu penyalaan
heater secara variabel.
7. Heater, berfungsi sebagai aktuator untuk mengatur besar
kecilnya pemanas agar dapat mencapai setpoint tertentu
8. Sensor Level, berfungsi untuk mendeteksi ketinggian air
pada tangki boiler.
9. Pompa Air, berfungsi untuk menyuplai air pada boiler agar
sistem dapat berjalan terus.

JURNAL ELKOLIND, SEPTEMBER 2109, VOL.06, N0. 3
75
3.2 Desain Mekanik
Gambar P&ID alat secara keseluruhan dapat dilihat pada
Gambar 8 berikut.
Gambar 8. P&ID alat secara keseluruhan
Sedangkan gambar mekanik keseluruhan dan gambar
mekanik mini boiler dapat dilihat pada Gambar 9 dan 10
berikut.
Gambar 9. Mekanik alat secara keseluruhan
Gambar 10. Mekanik mini boiler
3.3 Spesifikasi Alat
Berikut spesifikasi alat yang akan digunakan dalam
penelitian skripsi ini :
1. Spesifikasi Mekanik
a. Dimensi Total
- Panjang : 150 cm
- Lebar : 100 cm
- Tinggi : 100 cm
b. Dimensi Tabung
- Diameter : 15 cm
- Panjang : 30 cm
- Tebal : 0.5 mm
- Kapasitas : 5 liter
- Bahan : Stainless Steel
c. Dimensi Rangka Boiler
- Tinggi : 15 cm
- Panjang : 30 cm
- Bahan : Besi
2. Spesifikasi Elektronik
a. PLC Siemens S7-200 CPU 224 DC/DC/DC
- Tegangan : 24 VDC
- Digital Input : 14
- Digital Output : 10
b. Expand PLC Siemens S7-200
- Tegangan : 24 VDC
- Analog Input : 4 x 12 Bit (EM231)
- Sinyal Input : 0-5 VDC / 0-10 VDC /
0-20 mA
- Analog Output : 2 x 12 Bit (EM232)
- Sinyal Output : ±10 VDC / 0-20 mA
c. HMI Omron NB7W-TW00B
- Tegangan : 24 VDC
- Ukuran : 7 inch
- Resolusi : Touch Screen, 800x480
pixel
d. Sensor RTD (PT100)
- Jenis Sensor : Wire Wound
- Range Suhu : -200 s/d 400
- Sensitifitas : 0,385 Ω/
e. Immersion Heater
- Tegangan : 220 V
- Watt : 1000 W
- Dimensi : 16 mm x 180 mm
f. Power Supply
- Tegangan : 24 V
- Arus : 2 A
3.4 Perancangan Rangkaian Sensor Suhu PT100
Rangkaian Sensor suhu PT100 terdiri dari rangkaian
pengkondisi sinyal yang berupa rangkaian jembatan
wheatstone, dan rangkaian penguat. Rangkaian sensor ini
bertujuan untuk menghasilkan output berupa tegangan antara
0-5V setiap perubahan suhu sehingga dapat diolah oleh analog
input PLC. Gambar 11 merupakan rangkaian pengkondisi
sinyal PT100.
Gambar 11 Rangkaian Pengkondisi Sinyal PT100
JURNAL ELKOLIND, SEPTEMBER 2109, VOL.06, N0. 3
76
3.5 Perancangan Rangkaian Driver Heater
Rangkaian driver heater berfungsi untuk mengatur
penyalaan pada heater dengan cara mengatur waktu penyalaan
input driver heater dari PLC sehingga dapat diperoleh
pewaktu penyalaan heater yang bervariasi dengan skala antara
0-10s. Pada rangkaian driver heater menggunakan optocoupler
MOC3041 sebagai detektor gelombang sinus 220V saat
melewati titik nol dan TRIAC BT139 sebagai driver untuk
menyalakan heater. Gambar 12 merupakan rangkaian Driver
Heater
Gambar 12 Rangkaian Driver Heater
3.6 Perancangan Rangkaian Sensor Level Air
Rangkaian sensor level air yang digunakan pada tangki
boiler menggunakan 3 buah elektroda yang ditempatkan sesuai
dengan batas yang ditentukan sehingga dapat mendeteksi batas
low, normal dan high air pada tangki boiler. Rangkaian sensor
level air ini menggunakan transistor jenis PNP sebagai saklar
untuk mendeteksi ketinggian air pada tangki untuk memicu
penyalaan pompa air DC. Gambar 13 merupakan rangkaian
Sensor Level Air.
Gambar 13 Rangkaian Sensor Level Air
3.7 Perancangan PLC dan HMI
Perancangan PLC dan HMI dilakukan dengan melakukan
wiring terhadap rangkaian sensor suhu, sensor level air dan
driver heater ke masing-masing I/O PLC. Dan perancangan
program untuk PLC dan HMI dilakukan menggunakan
software Step-7 Microwin dan NB-Designer.
IV. HASIL DAN ANALISA
4.1 Pengujian Sensor Suhu PT100
Pengujian sensor suhu PT100 dilakukan dengan cara
membandingkan hasil pembacaan sensor suhu yang
ditampilkan pada HMI dengan hasil pembacaan dengan alat
ukur thermometer. Hal ini bertujuan untuk mengetahui
besarnya nilai error yang dibaca oleh sensor dengan alat ukur.
Pengujian dilakukan dengan melakukan perubahan nilai suhu
setiap kenaikan 10 °C seperti yang ditunjukkan pada tabel 2
berikut :
Tabel 2.Perbandingan Pembacaan Sensor Suhu
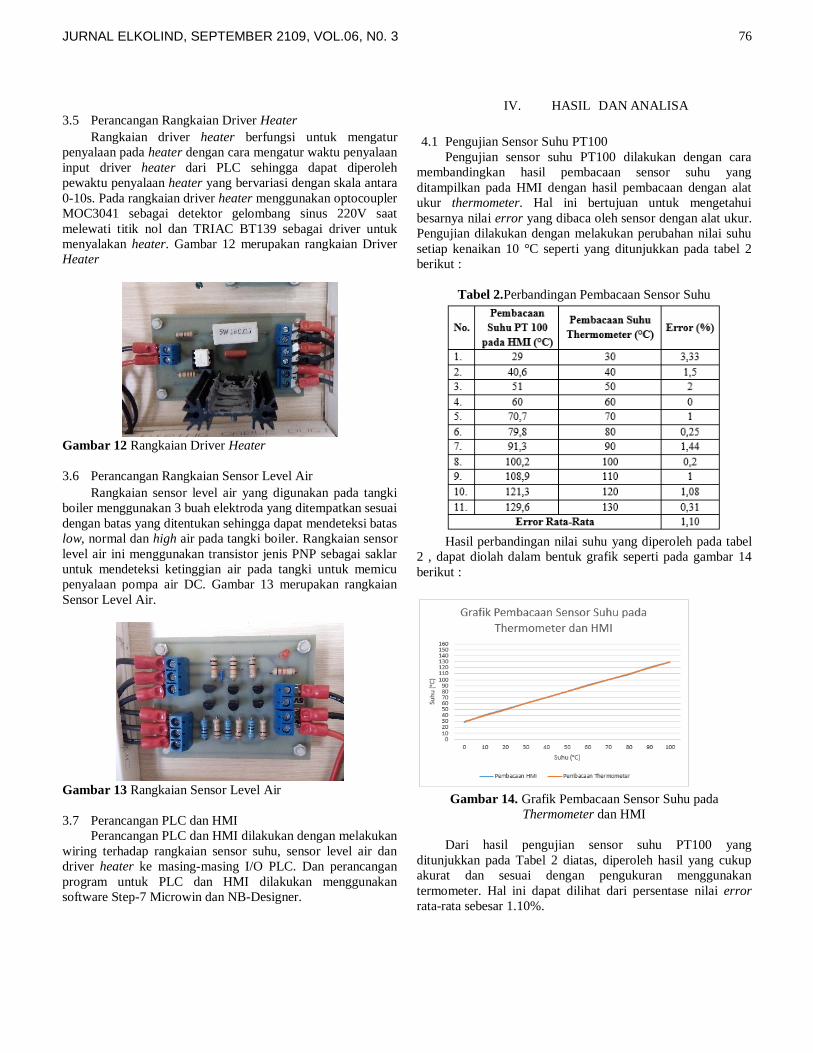
Hasil perbandingan nilai suhu yang diperoleh pada tabel
2 , dapat diolah dalam bentuk grafik seperti pada gambar 14
berikut :
Gambar 14. Grafik Pembacaan Sensor Suhu pada
Thermometer dan HMI
Dari hasil pengujian sensor suhu PT100 yang
ditunjukkan pada Tabel 2 diatas, diperoleh hasil yang cukup
akurat dan sesuai dengan pengukuran menggunakan
termometer. Hal ini dapat dilihat dari persentase nilai error
rata-rata sebesar 1.10%.

JURNAL ELKOLIND, SEPTEMBER 2109, VOL.06, N0. 3
77
Selain pengujian dengan pembacaan suhu yang
ditampilkan pada HMI dengan termometer, juga dilakukan
pengujian sensor suhu dengan membandingkan hasil
pengukuran nilai resistansi dari sensor PT100 dengan nilai
yang ada pada datasheet untuk pengujian setiap perubahan
suhu sebesar 10 °C. Hasil dari perbandingan nilai resistansi
tersebut dapat dilihat pada tabel 3 berikut :
Tabel 3.Hasil Perbandingan nilai Resitansi Sensor PT100
Hasil perbandingan nilai resistansi dengan suhu yang
diperoleh pada tabel 3 diatas, dapat diolah dalam bentuk grafik
seperti pada gambar 15 berikut :
Gambar 15. Perbandingan nilai resistansi dari sensor PT100
dengan nilai pada Datasheet
Dari hasil perbandingan nilai resistansi sensor suhu
PT100 yang ditunjukkan pada Tabel 3 diatas, diperoleh hasil
yang cukup akurat dan sesuai dengan nilai yang ada pada
datasheet. Hal ini dapat dilihat dari persentase nilai error rata-
rata sebesar 0.351%. Nilai error rata-rata yang didapat tidak
lebih besar dari 5% sehingga dapat ditoleransi dan tidak
mengganggu kinerja sistem.
4.2 Pengujian Pengkondisi Sinyal Sensor Suhu PT100
Pengujian rangkaian pengkondisi sinyal sensor suhu
PT100 yang dilakukan bertujuan untuk mengetahui nilai
output tegangan pada setiap perubahan nilai suhu. Pengujian
dilakukan dengan melakukan perbandingan hasil perhitungan
dengan hasil pengukuran output sensor sebelum penguatan
dan setelah penguatan oleh pengkondisi sinyal berdasarkan
perubahan suhu. Perbandingan hasil perhitungan dan
pengukuran output sensor tanpa penguatan dapat dilihat pada
tabel 4 berikut :
Tabel 4. Perbandingan Output Sensor PT100 Tanpa
Penguatan
Dari hasil perbandingan pada tabel 4 diatas, nilai
tegangan output perhitungan dan pengukuran pada jembatan
wheatstone diperoleh rata-rata sebesar 1.646%. Dari nilai
error yang didapat maka rangkaian jembatan wheatstone
mampu bekerja dengan baik dan akurat namun memiliki nilai
tegangan yang rendah. Sehingga dengan nilai output yang
hanya dalam orde mV, diperlukan penguatan pada
pengkondisi sinyal. Penguatan yang diberikan disesuaikan
dengan range input analog PLC yaitu sebesar 0-5V.
Pengujian selanjutnya dengan melakukan perbandingan
hasil perhitungan output dan pengukuran serta hasil yang
terbaca pada analog input PLC pada output pengkondisi sinyal
setelah penguatan. Data analog input diperoleh dengan
mengkonversikan tegangan yang terbaca pada analog input
menjadi nilai tegangan dalam bentuk word dan nilai suhu
dalam bentuk angka desimal menggunakan software.
Perbandingan perhitungan output dan pengukuran serta hasil
yang terbaca pada analog input PLC pada output sensor
setelah penguatan dapat dilihat pada tabel 5 berikut :
Tabel 5
Perbandingan Output Sensor PT100 Dengan Penguatan

JURNAL ELKOLIND, SEPTEMBER 2109, VOL.06, N0. 3
78
Hasil perbandingan nilai tegangan dengan suhu yang
diperoleh pada tabel 5 diatas, dapat diolah dalam bentuk grafik
seperti pada gambar 16 berikut :
Gambar 16. Perbandingan nilai pengukuran dan perhitungan
tegangan pengkondisi sinyal sensor PT100
Dari hasil perbandingan yang ditunjukkan pada Tabel 5
diatas, diperoleh hasil yang cukup akurat dan sesuai dengan
hasil perhitungan. Hal ini dapat dilihat dari persentase nilai
error rata- sebesar 1,842%. Nilai error rata-rata yang didapat
tidak lebih besar dari 5% sehingga dapat ditoleransi dan tidak
mengganggu kinerja sistem.
Dan dari hasil penguatan tegangan output pengkondisi
sinyal sensor PT100 diperoleh range tegangan antara 1.2V –
4.9V, sehingga output pengondisi sinyal dapat memenuhi
kebutuhan analog input PLC dimana kebutuhan analog input
PLC disetting pada range 0-5V. Dengan demikian rangkaian
pengkondisi sinyal sensor suhu PT100 dapat bekerja dengan
cukup akurat dan optimal
4.3 Pengujian Rangkaian Driver Heater
Pengujian pada rangkaian driver heater bertujuan untuk
mengetahui kinerja dari opto triac MOC 3041 dan TRIAC
BT139. Rangkaian driver heater ini memiliki prinsip kerja
dengan cara mengatur waktu penyalaan input driver heater
dari PLC sehingga dapat diperoleh pewaktu penyalaan heater
yang bervariasi dengan skala antara 0-10s. Waktu penyalaan
driver heater yang bervariasi sesuai degan respon sistem dari
data PID dengan skala 0-100% akan menyebabkan heater
akan menyala mulai dari 0-10s. Kontrol pewaktu penyalaan
opto triac dikontrol melalui PLC dan pengujian dilakukan
dengan menggunakan rangkaian driver heater, dan avometer
digital untuk mengukur output tegangan driver heater.
Selanjutnya dilakukan pengukuran dengan mengukur
waktu input dan tegangan output driver heater yang hasilnya
dapat dilihat pada Tabel 6 berikut :
Tabel 6. Hasil Pengujian dan Pengukuran Rangkaian Driver
Heater
Dari tabel 6 diatas dapat disimpulkan bahwa semakin
besar input pewaktu yang diberikan maka semakin lama waktu
dari output TRIAC untuk aktif.
4.4 Pengujian Rangkaian Sensor Level
Pengujian rangkaian sensor level bertujuan untuk
mengetahui output tegangan dari elektroda yang akan
dijadikan sebagai input PLC. Pengujian dilakukan dengan
menggabungkan atau merendam elektroda referensi dengan
elektroda low, normal dan high secara bergantian. Apabila
elektroda low, normal atau high tidak bergabung dengan
elektroda referensi, maka tegangan output rangkaian sensor
level air akan bernilai 0 V, dan apabila elektroda referensi
bergabung dengan elektroda low, normal atau high maka
tegangan output rangkaian sensor level akan bernilai 24 V
untuk masing-masing output elektroda. Hasil pengujian dapat
dilihat pada tabel 7 berikut :
Tabel 7. Hasil Pengujian Sensor Level Air
Dari hasil pengujian pada Tabel 7 diatas dapat dilihat
bahwa sensor level air dapat bekerja dengan akurat untuk
pengukuran setiap level air yang dibutuhkan.
4.5 Pengujian Kontrol PID
Pengujian Kontrol PID dilakukan untuk membandingkan
nilai parameter antara sistem tanpa kontroler dengan sistem
dengan kontroler PID. Kontrol PID memiliki fungsi untuk
mengatur suhu dalam mini boiler dengan mengatur waktu
penyalaan heater. Pengujian ini dilakukan dengan cara
mengambil sample data dari pengujian respon suhu terhadap
waktu tanpa menggunakan kontroler PID. Pengujian kontrol
PID yang digunakan menggunakan metode Ziegler Nichols
dengan grafik respon kurva S.
Dari pengujian tanpa kontrol PID, pengambilan data
dilakukan dengan cara mengaktifkan heater secara manual
hingga tercapai setpoint 100 °C. Hasil dari respon sistem tanpa
kontroler PID dapat dilihat pada Gambar 17 berikut.
Gambar 17 Kurva Respon Karakteristik Sistem Tanpa
Kontroler

JURNAL ELKOLIND, SEPTEMBER 2109, VOL.06, N0. 3
79
Berdasarkan grafik respon sistem tanpa kontroler pada
Gambar 17 diatas, diperoleh nilai L = 130 dan T = 2170.
Selanjutnya pengambilan data dilakukan dengan cara
memasukkan nilai Kp = 20.03, Ti = 260 dan Td = 65 terhadap
setpoint 100 °C. Hasil dari respon sistem dengan kontroler
PID dapat dilihat pada Gambar 18 berikut.
Gambar 18 Grafik Respon Menggunakan kontrol PID
Dari grafik respon sistem menggunakan kontrol PID
seperti yang ditunjukkan pada gambar 18 diatas, diperoleh
karakteristik respon sistem seperti ditunjukkan pada tabel 8
berikut.
Tabel 8. Karakteristik Respon menggunkan kontrol PID
Dari hasil pengujian sistem tanpa kontroler dan dengan
kontroler PID, dapat disimpulkan bahwa rise time
menggunakan kontrol PID lebih cepat dibandingkan tanpa
mennggunakan kontroler. Dan error steady state
menggunakan kontrol PID menunjukkan hasil yang lebih baik
dibanding tanpa kontrol dengan error sebesar 0.7 %.
4.5.1 Kontrol PID dengan Manual Tuning
Dari hasil tuning secara manual, diperoleh hasil respon
terbaik dengan nilai parameter Kp = 20.03, Ti =120 dan Td =
4.2. Hasil dari respon sistem dapat dilihat pada Gambar 19
berikut
Gambar 19 Grafik Respon kontrol PID dengan manual tuning
Dari grafik respon sistem menggunakan kontrol PID
dengan manual tuning seperti yang ditunjukkan pada gambar
19 diatas, diperoleh karakteristik respon sistem seperti
ditunjukkan pada tabel 9 berikut.
Tabel 9. Karakteristik Respon kontrol PID manual tuning
Dari hasil pengujian sistem dengan kontroler PID hasil
perhitungan dengan manual tuning, dapat disimpulkan bahwa
rise time menggunakan kontrol PID hasil manual tuning lebih
cepat dibandingkan dengan nilai kontroler PID hasil
perhitungan. Dan error steady state menggunakan kontrol PID
hasil tuning manual menunjukkan hasil yang lebih baik
dibanding nilai kontroler PID hasil perhitungan dengan error
sebesar 0.1 %.
4.5.2 Kontrol PID dengan Gangguan 25%
Menggunakan parameter PID dengan nilai Kp = 20.03, Ti
=120 dan Td = 4.2, saat sistem telah mencapai setpoint 100°C
sistem diberikan gangguan dengan cara membuka valve secara
maksimal dengan waktu selama 15 detik. Hasil dari respon
sistem dapat dilihat pada Gambar 20 berikut
Gambar 20 Grafik Respon kontrol PID dengan gangguan
25%
Dari grafik respon sistem kontrol PID dengan gangguan
sebesar 25% seperti yang ditunjukkan pada gambar 20 diatas,
dengan error steady state sebesar 1.5 °C saat diberikan
gangguan, waktu yang dibutuhkan sistem untuk kembali
menstabilkan suhu boiler pada suhu 100 °C adalah 480 s.
Waktu untuk kembali menstabilkan suhu ke setpoint tidak
terlalu lama dan perubahan suhu tergolong sangat cepat karena
hanya diberi gangguan sebesar 25%
4.5.3 Kontrol PID dengan Gangguan 50%
Menggunakan parameter PID dengan nilai Kp = 20.03,
Ti =120 dan Td = 4.2, saat sistem telah mencapai setpoint
100°C sistem diberikan gangguan dengan dengan cara
membuka valve secara maksimal dengan waktu selama 30
JURNAL ELKOLIND, SEPTEMBER 2109, VOL.06, N0. 3
80
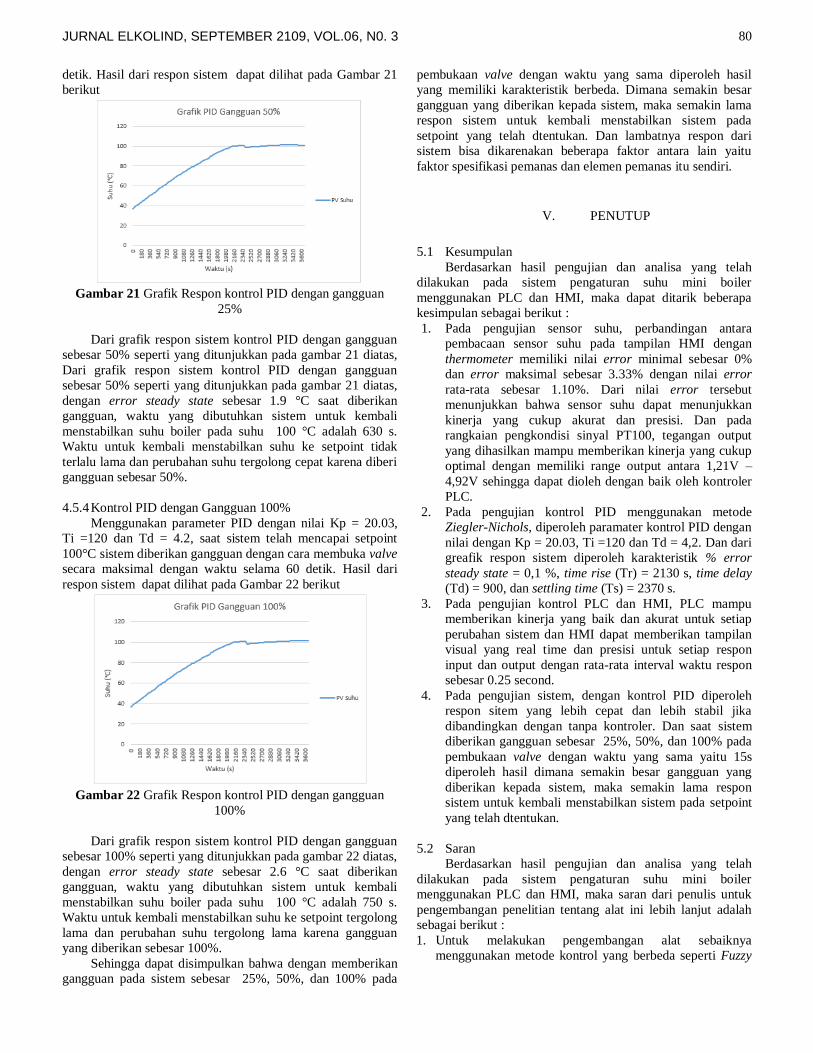
detik. Hasil dari respon sistem dapat dilihat pada Gambar 21
berikut
Gambar 21 Grafik Respon kontrol PID dengan gangguan
25%
Dari grafik respon sistem kontrol PID dengan gangguan
sebesar 50% seperti yang ditunjukkan pada gambar 21 diatas,
Dari grafik respon sistem kontrol PID dengan gangguan
sebesar 50% seperti yang ditunjukkan pada gambar 21 diatas,
dengan error steady state sebesar 1.9 °C saat diberikan
gangguan, waktu yang dibutuhkan sistem untuk kembali
menstabilkan suhu boiler pada suhu 100 °C adalah 630 s.
Waktu untuk kembali menstabilkan suhu ke setpoint tidak
terlalu lama dan perubahan suhu tergolong cepat karena diberi
gangguan sebesar 50%.
4.5.4 Kontrol PID dengan Gangguan 100%
Menggunakan parameter PID dengan nilai Kp = 20.03,
Ti =120 dan Td = 4.2, saat sistem telah mencapai setpoint
100°C sistem diberikan gangguan dengan cara membuka valve
secara maksimal dengan waktu selama 60 detik. Hasil dari
respon sistem dapat dilihat pada Gambar 22 berikut
Gambar 22 Grafik Respon kontrol PID dengan gangguan
100%
Dari grafik respon sistem kontrol PID dengan gangguan
sebesar 100% seperti yang ditunjukkan pada gambar 22 diatas,
dengan error steady state sebesar 2.6 °C saat diberikan
gangguan, waktu yang dibutuhkan sistem untuk kembali
menstabilkan suhu boiler pada suhu 100 °C adalah 750 s.
Waktu untuk kembali menstabilkan suhu ke setpoint tergolong
lama dan perubahan suhu tergolong lama karena gangguan
yang diberikan sebesar 100%.
Sehingga dapat disimpulkan bahwa dengan memberikan
gangguan pada sistem sebesar 25%, 50%, dan 100% pada
pembukaan valve dengan waktu yang sama diperoleh hasil
yang memiliki karakteristik berbeda. Dimana semakin besar
gangguan yang diberikan kepada sistem, maka semakin lama
respon sistem untuk kembali menstabilkan sistem pada
setpoint yang telah dtentukan. Dan lambatnya respon dari
sistem bisa dikarenakan beberapa faktor antara lain yaitu
faktor spesifikasi pemanas dan elemen pemanas itu sendiri.
V. PENUTUP
5.1 Kesumpulan
Berdasarkan hasil pengujian dan analisa yang telah
dilakukan pada sistem pengaturan suhu mini boiler
menggunakan PLC dan HMI, maka dapat ditarik beberapa
kesimpulan sebagai berikut :
1. Pada pengujian sensor suhu, perbandingan antara
pembacaan sensor suhu pada tampilan HMI dengan
thermometer memiliki nilai error minimal sebesar 0%
dan error maksimal sebesar 3.33% dengan nilai error
rata-rata sebesar 1.10%. Dari nilai error tersebut
menunjukkan bahwa sensor suhu dapat menunjukkan
kinerja yang cukup akurat dan presisi. Dan pada
rangkaian pengkondisi sinyal PT100, tegangan output
yang dihasilkan mampu memberikan kinerja yang cukup
optimal dengan memiliki range output antara 1,21V –
4,92V sehingga dapat dioleh dengan baik oleh kontroler
PLC.
2. Pada pengujian kontrol PID menggunakan metode
Ziegler-Nichols, diperoleh paramater kontrol PID dengan
nilai dengan Kp = 20.03, Ti =120 dan Td = 4,2. Dan dari
greafik respon sistem diperoleh karakteristik % error
steady state = 0,1 %, time rise (Tr) = 2130 s, time delay
(Td) = 900, dan settling time (Ts) = 2370 s.
3. Pada pengujian kontrol PLC dan HMI, PLC mampu
memberikan kinerja yang baik dan akurat untuk setiap
perubahan sistem dan HMI dapat memberikan tampilan
visual yang real time dan presisi untuk setiap respon
input dan output dengan rata-rata interval waktu respon
sebesar 0.25 second.
4. Pada pengujian sistem, dengan kontrol PID diperoleh
respon sitem yang lebih cepat dan lebih stabil jika
dibandingkan dengan tanpa kontroler. Dan saat sistem
diberikan gangguan sebesar 25%, 50%, dan 100% pada
pembukaan valve dengan waktu yang sama yaitu 15s
diperoleh hasil dimana semakin besar gangguan yang
diberikan kepada sistem, maka semakin lama respon
sistem untuk kembali menstabilkan sistem pada setpoint
yang telah dtentukan.
5.2 Saran
Berdasarkan hasil pengujian dan analisa yang telah
dilakukan pada sistem pengaturan suhu mini boiler
menggunakan PLC dan HMI, maka saran dari penulis untuk
pengembangan penelitian tentang alat ini lebih lanjut adalah
sebagai berikut :
1. Untuk melakukan pengembangan alat sebaiknya
menggunakan metode kontrol yang berbeda seperti Fuzzy

JURNAL ELKOLIND, SEPTEMBER 2109, VOL.06, N0. 3
81
Logic dan cascade control sebagai perbandingan respon
yang dihasilkan dari kontroler yang berbeda.
2. Pengembangan alat juga dapat dilakukan dengan
menggunakan komunikasi jarak jauh sperti DCS atau
SCADA sehingga lebih menyerupai implementasi pada
dunia industri
3. Pada mekanik, dapat ditambahkan cover sebagai
pengaman tangki agar panas tidak menyebar dan
membahayakan pengguna.
DAFTAR PUSTAKA
[1] Effendi, Asnal. 2013. Perancangan Pengontrolan Pemanas Air
Menggunakan PLC Siemens S7-1200 dan Sensor Arus ACS712. Jurnal
Teknik Elektro Volume 2 No.3. Institut Teknologi Padang.
[2] Kurniawan, Iwan. 2014. Diktat Sensor dan Tranduser. Jambi :
Politeknik Jambi.
[3] Manual Book Siemens S7-200. 2003.
[4] Manual Book Omron NB7W-TW00B. 2007
[5] Chusnul Adib, Mohammad. 2016. Rancang Bangun Pengendalian Alat
Vacuum Pressure Impregnation Berbasis PLC Dan HMI Untuk
Gulungan Baru Mesin Listrik. JETri, Volume 14, Nomor 1. Jurusan
Teknik Elektro. Universitas Trisakti.
[6] Djokosetyardjo, H.J.1999. Ketel Uap. Pradnya Paramita. Jakarta
[7] Setiawan, Iwan. 2008. Kontrol PID Untuk Proses Industri. Jakarta :
Penerbit Elex Media Komputindo.
[8] Kurniawan, Iwan. 2014. Diktat Sensor dan Tranduser. Jambi :
Politeknik Jambi.
[9] https://www.amazon.com/AGPtek-Stainless-Thermistor-Sensor
Temperature/dp/B008YP1D04
[10] Lubis, Hasrin. 2016. Rancang Bangun Alat Penggongseng Kelapa
Untuk Pembuatan Bumbu Dapur Dengan Menggunakan Pemanas
Listrik Temperatur 800c Dengan Kapasitas 3 Kg. Jurnal Teknik Mesin.
Politeknik Negeri Lhoksumawe.
[11] Katsuhiko, Ogata. 1997. Modern Control Engineering Third Generation.
University Of Minnesota.
Related Documents











