Modeling Visual Context is Key to Augmenting Object Detection Datasets Nikita Dvornik, Julien Mairal, Cordelia Schmid Univ. Grenoble Alpes, Inria, CNRS, Grenoble INP ⋆ , LJK, 38000 Grenoble, France [email protected] Abstract. Performing data augmentation for learning deep neural net- works is well known to be important for training visual recognition sys- tems. By artificially increasing the number of training examples, it helps reducing overfitting and improves generalization. For object detection, classical approaches for data augmentation consist of generating images obtained by basic geometrical transformations and color changes of orig- inal training images. In this work, we go one step further and lever- age segmentation annotations to increase the number of object instances present on training data. For this approach to be successful, we show that modeling appropriately the visual context surrounding objects is crucial to place them in the right environment. Otherwise, we show that the previous strategy actually hurts. With our context model, we achieve significant mean average precision improvements when few labeled ex- amples are available on the VOC’12 benchmark. Keywords: Object Detection, Data Augmentation, Visual Context 1 Introduction Object detection is one of the most classical computer vision task and is often considered as a basic proxy for scene understanding. Given an input image, an algorithm is expected to produce a set of tight boxes around objects while auto- matically classifying them. Obviously, modeling correctly object appearances is important, but it is also well-known that visual context provides important cues for recognition, both for computer vision systems and for humans [1]. Objects from the same class tend indeed to be grouped together in similar environments; sometimes they interact with it and do not even make sense in its absence. Whenever visual information is corrupted, ambiguous, or incomplete (e.g., an image contains noise, bad illumination conditions, or an object is oc- cluded or truncated), visual context becomes a crucial source of information. Frequently, certain object categories may for instance most often appear in spe- cific conditions (e.g., planes in the sky, plates on the table), in co-occurrence with objects of other specific classes (e.g., baseball ball and baseball bat), and more generally, any type of clue for object recognition that is not directly related ⋆ Institute of Engineering Univ. Grenoble Alpes

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
-
Modeling Visual Context is Key to
Augmenting Object Detection Datasets
Nikita Dvornik, Julien Mairal, Cordelia Schmid
Univ. Grenoble Alpes, Inria, CNRS, Grenoble INP⋆, LJK, 38000 Grenoble, [email protected]
Abstract. Performing data augmentation for learning deep neural net-works is well known to be important for training visual recognition sys-tems. By artificially increasing the number of training examples, it helpsreducing overfitting and improves generalization. For object detection,classical approaches for data augmentation consist of generating imagesobtained by basic geometrical transformations and color changes of orig-inal training images. In this work, we go one step further and lever-age segmentation annotations to increase the number of object instancespresent on training data. For this approach to be successful, we showthat modeling appropriately the visual context surrounding objects iscrucial to place them in the right environment. Otherwise, we show thatthe previous strategy actually hurts. With our context model, we achievesignificant mean average precision improvements when few labeled ex-amples are available on the VOC’12 benchmark.
Keywords: Object Detection, Data Augmentation, Visual Context
1 Introduction
Object detection is one of the most classical computer vision task and is oftenconsidered as a basic proxy for scene understanding. Given an input image, analgorithm is expected to produce a set of tight boxes around objects while auto-matically classifying them. Obviously, modeling correctly object appearances isimportant, but it is also well-known that visual context provides important cuesfor recognition, both for computer vision systems and for humans [1].
Objects from the same class tend indeed to be grouped together in similarenvironments; sometimes they interact with it and do not even make sense in itsabsence. Whenever visual information is corrupted, ambiguous, or incomplete(e.g., an image contains noise, bad illumination conditions, or an object is oc-cluded or truncated), visual context becomes a crucial source of information.Frequently, certain object categories may for instance most often appear in spe-cific conditions (e.g., planes in the sky, plates on the table), in co-occurrencewith objects of other specific classes (e.g., baseball ball and baseball bat), andmore generally, any type of clue for object recognition that is not directly related
⋆ Institute of Engineering Univ. Grenoble Alpes
-
2 N. Dvornik, J. Mairal and C. Schmid
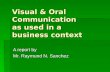
Images Instances Using context guidance
Random instance placement
Copy-Paste Data Augmentation New Training Examples
Fig. 1. Examples of data-augmented training examples produced by our
approach. Images and objects are taken from the VOC’12 dataset that contains seg-mentation annotations. We compare the output obtained by pasting the objects withour context model vs. those obtained with random placements. Even though the re-sults are not perfectly photorealistic and display blending artefacts, the visual contextsurrounding objects is more often correct with the explicit context model.
to the object’s appearance is named “context” in the literature. For this reason,a taxonomy of contextual information is proposed in [2] to better understandwhat type of visual context is useful for object detection.
Before the deep learning/ImageNet revolution, the previous generation ofobject detectors such as [3–6] modeled the interaction between object locations,categories, and context by manual engineering of local descriptors, feature ag-gregation methods, and by defining structural relationship between objects. Incontrast, recent works based on convolutional neural networks such as [7–10]implicitly model visual context by design since the receptive field of “artificialneurons” grows with the network’s depth, eventually covering the full imagefor the last layers. For this reason, these CNNs-based approaches have shownmodest improvements when combined with an explicit context model [11].
Our results are not in contradiction with such previous findings. We showthat explicit context modeling is important only for a particular part of objectdetection pipelines that was not considered in previous work. When training aconvolutional neural network, it is indeed important to control overfitting, es-pecially if few labeled training examples are available. Various heuristics aretypically used for that purpose such as DropOut [12], penalizing the norm of thenetwork parameters (weight decay), or early stopping. Even though the regular-ization effect of such approaches is not well understood from a theoretical pointof view, these heuristics have been found to be useful in practice.
Besides these heuristics related to the learning procedure, another way to con-trol overfitting consists of artificially increasing the size of training data by using
-
Context Data Augmentation for Object Detection 3
prior knowledge on the task. For instance, all object classes from the VOC’12dataset [13] are invariant to horizontal flips (e.g., a flipped car is still a car) andto many less-trivial transformations. A more ambitious data augmentation tech-nique consists of leveraging segmentation annotations, either obtained manually,or from an automatic segmentation system, and create new images with objectsplaced at various positions in existing scenes [14–16]. While not achieving perfectphotorealism, this strategy with random placements has proven to be surpris-ingly effective for object instance detection [14], which is a fine-grained detectiontask consisting of retrieving instances of a particular object from an image col-lection; in contrast, object detection focuses on detecting object instances froma particular category. Unfortunately, the random-placement strategy does notextend to the object detection task, as shown in the experimental section. Byplacing training objects at unrealistic positions, implicitely modeling contextbecomes difficult and the detection accuracy drops substantially.
Along the same lines, the authors of [15] have proposed to augment datasetsfor text recognition by adding text on images in a realistic fashion. There, placingtext with the right geometrical context proves to be critical. Significant improve-ments in accuracy are obtained by first estimating the geometry of the scene,before placing text on an estimated plane. Also related, the work of [16] is usingsuccessfully such a data augmentation technique for object detection in indoorscene environments. Modeling context has been found to be critical as well andhas been achieved by also estimating plane geometry and objects are typicallyplaced on detected tables or counters, which often occur in indoor scenes.
In this paper, we consider the general object detection problem, which re-quires more generic context modeling than estimating plane and surfaces as donefor instance in [15, 16]. To this end, the first contribution of our paper is method-ological: we propose a context model based on a convolutional neural network,which will be made available as an open-source software package. The modelestimates the likelihood of a particular category of object to be present inside abox given its neighborhood, and then automatically finds suitable locations onimages to place new objects and perform data augmentation. A brief illustrationof the output produced by this approach is presented in Figure 1. The sec-ond contribution is experimental: We show with extensive tests on the VOC’12benchmark that context modeling is in fact a key to obtain good results forobject detection and that substantial improvements over non-data-augmentedbaselines may be achieved when few labeled examples are available.
2 Related Work
In this section, we briefly discuss related work for visual context modeling anddata augmentation for object detection.
Modeling visual context for object detection. Relatively early, visual context hasbeen modeled by computing statistical correlation between low-level featuresof the global scene and descriptors representing an object [17, 18]. Later, the
-
4 N. Dvornik, J. Mairal and C. Schmid
authors of [4] introduced a simple context re-scoring approach operating onappearance-based detections. To encode more structure, graphical models werethen widely used in order to jointly model appearance, geometry, and contextualrelations [19, 20]. Then, deep learning approaches such as convolutional neuralnetworks started to be used [7–9]; as mentioned previously, their features al-ready contain implicitly contextual information. Yet, the work of [21] explicitlyincorporates higher-level context clues and combines a conditional random fieldmodel with detections obtained by Faster-RCNN. With a similar goal, recurrentneural networks are used in [22] to model spatial locations of discovered objects.Another complementary direction in context modeling with convolutional neuralnetworks use a deconvolution pipeline that increases the field of view of neuronsand fuse features at different scales [22–24], showing better performance essen-tially on small objects. The works of [2, 25] analyze different types of contextualrelationships, identifying the most useful ones for detection, as well as variousways to leverage them. However, despite these efforts, an improvement due topurely contextual information has always been relatively modest [11, 26].
Data augmentation for object detection. Data augmentation is a major tool totrain deep neural networks. If varies from trivial geometrical transformationssuch as horizontal flipping, cropping with color perturbations, and adding noiseto an image [27], to synthesizing new training images [28, 29]. Some recent objectdetectors [9, 10, 23] benefit from standard data augmentation techniques morethan others [7, 8]. The performance of Fast- and Faster-RCNN could be for in-stance increased by simply corrupting random parts of an image in order tomimic occlusions [30]. Regarding image synthesis, recent works such as [31–33]build and train their models on purely synthetic rendered 2d and 3d scenes. How-ever, a major difficulty for models trained on synthetic images is to guaranteethat they will generalize well to real data since the synthesis process introducessignificant changes of image statistics [29]. To address this issue, the authors of[15] adopt a different direction by pasting real segmented object into naturalimages, which reduces the presence of rendering artefacts. For object instancedetection, the work [16] estimates scene geometry and spatial layout, before plac-ing objects in the image to create realistic training examples. In [14], the authorspropose an even simpler solution to the same problem by pasting images in ran-dom positions but modeling well occluded and truncated objects, and makingthe training step robust to boundary artifacts at pasted locations.
3 Modeling Visual Context for Data Augmentation
Our approach for data augmentation mainly consists of two parts: we first modelvisual context by using bounding box annotations, where the surrounding of abox is used as an input to a convolutional neural network to predict the presenceor absence of an object within the box. Then, the trained context model is used togenerate a set of possible new locations for objects. The full pipeline is presentedin Fig. 2. In this section, we describe these two steps in details, but before that,we present and discuss a preliminary experiment that has motivated our work.
-
Context Data Augmentation for Object Detection 5
ContextCNN
Prepare local context samples
Predict objectness
Match instanceswith boxes
Select,Rescale,Blend in
Use for training
1
2
3
4
Fig. 2. Illustration of our data augmentation approach. We select an image foraugmentation and 1) generate 200 candidate boxes that cover the image. Then, 2) foreach box we find a neighborhood that contains the box entirely, crop this neighborhoodand mask all pixels falling inside the bounding box; this “neighborhood” with maskedpixels is then fed to the context neural network module and 3) object instances arematched to boxes that have high confidence scores for the presence of an object cate-gory. 4) We select at most two instances that are rescaled and blended into the selectedbounding boxes. The resulting image is then used for training the object detector.
3.1 Preliminary Experiment with Random Positioning
In [14], data augmentation is performed by placing segmented objects at ran-dom positions in new scenes. As mentioned previously, the strategy was shown tobe effective for object instance detection, as soon as an appropriate procedure isused for preventing the object detector to overfit blending artefacts—that is, themain difficulty is to prevent the detector to “detect artefacts” instead of detect-ing objects of interest. This is achieved by using various strategies to smoothobject boundaries such as Poisson blending [34], and by adding “distractors”objects that do not belong to any of the dataset categories, but which are alsosynthetically pasted on random backgrounds. With distractors, artefacts occurboth in positive and negative examples, preventing the network trained for ob-ject detection to overfit them. According to [14], this strategy brings substantialimprovements for the object instance detection/retrieval task, where modelingthe fine-grain appearance of an object instance seems to be more important thanmodeling visual context as in the general category object detection task.
Unfortunately, the above context-free strategy does not extend trivially tothe object detection task we consider. Our preliminary experiment conductedon the VOC’12 dataset actually shows that it may even hurt the accuracy of thedetector, which has motivated us to propose instead an explicit context model.Specifically, we conducted an experiment by following the original strategy of [14]
-
6 N. Dvornik, J. Mairal and C. Schmid
as closely as possible. We use the subset of the VOC’12 train set that has ground-truth segmentation annotations to cut object instances from images and thenplace them on other images from the training set. As in [14], we experimentedwith various blending strategies (Gaussian or linear blur, Poisson blending, orusing no blending at all) to smooth the boundary artifacts. Following [14], we alsoconsidered “distractors”, which are then labeled as background. Distractors weresimply obtained by copy-pasting segmented objects from the COCO dataset [35]from categories that do not appear in VOC’12.1
For any combination of blending strategy, by using distractors or not, thenaive data augmentation approach with random placement did not improve uponthe baseline without data augmentation for the classical object detection task.A possible explanation may be that for instance object detection, the detectordoes not need to learn intra-class variability of object/scene representations andseems to concentrate only on appearance modeling of specific instances, whichis not the case for category-level object detection. This experiment was the keymotivation for proposing a context model, which we now present.
3.2 Modeling Visual Context with Convolutional Neural Networks
Since the context-free data augmentation failed, we propose to learn where toautomatically place objects by using a convolutional neural network. Here, wepresent the data generation, model training, and object placement procedures.
Contextual data generation. We consider training data with bounding box andcategory annotations. For each bounding box B associated to a training image I,we create a set of training contexts, which are defined as subimages of I fullyenclosing the bounding box B whose content is masked out, as illustrated in Fig-ure 3. Several contexts can be created from a single annotated bounding box Bby varying the size of the subimage around B and its aspect ratio. In addition,“background” contexts are also created by considering random bounding boxeswhose intersection over union with any ground truth doesn’t exceed a thresholdof 0.3, and whose content is also masked out. The shape of such boxes is definedby aspect ratio a and relative scale s. We draw a pair of parameters from the jointdistribution induced by bounding boxes containing positive objects, i.e. a 30×30bins normalized histogram. Since in general, there is more background samplesthan the ones actually containing objects, we sample “background” contexts 3times more often following sampling strategies in [7, 9].
Model training. Given the set of all contexts, gathered from all training data,we train a convolutional neural network to predict the presence of each objectin the masked bounding box. The input to the network are the “contextualimages” obtained during the data generation step, and which contain a maskedbounding box inside. These contextual images are resized to 300 × 300 pixels,
1 Note that external data from COCO was used only in this preliminary experimentand not in the experiments reported later in Section 4.
-
Context Data Augmentation for Object Detection 7
Fig. 3. Contextual images - examples of inputs to the context model. Asubimage bounded by a magenta box is used as an input to the context model aftermasking-out the object information inside a red box. The top row lists examples ofpositive samples encoding real objects surrounded by regular and predictable context.Positive training examples with ambiguous or uninformative context are given in thesecond row. The bottom row depicts negative examples enclosing background. Thisfigure shows that contextual images could be ambiguous to classify correctly and thetask of predicting the category given only the context is challenging.
Fig. 4. Different kinds of blending used in experiments. From left to right:linear smoothing of boundaries, Gaussian smoothing, no processing, motion blur of thewhole image, Poisson blending [34].
-
8 N. Dvornik, J. Mairal and C. Schmid
and the output of the network is a label in a set {1, 2, ...,K + 1}, where K isthe number of object categories and the (K+1)-th class represents background.For such a multi-class image classification problem here, we use the classicalResNet50 network [36] pre-trained on ImageNet, and change the last layer to bea softmax with K + 1 activations (see experimental section for details).
Selection of object locations at test time. Once the context model is trained byusing training data annotated with bounding boxes, we use it to select loca-tions to perform data augmentation on a given image. As input, the trainedclassifier receives “contextual images” with a bounding box masked out (as inSection 3.2). The model is able to provide a set of “probabilities” representingthe presence of each object category in a given bounding box, by consideringits visual surrounding. Since evaluating all potential bounding boxes from animage is too costly, we randomly draw 200 candidate bounding boxes and retainthe ones where an object category has a score greater than 0.8; empirically, thenumber 200 was found to provide good enough bounding boxes among the topscoring ones, while resulting in a reasonably fast data augmentation procedure.
Blending objects in their environment. Whenever a bounding box is selectedby the previous procedure, we need to blend an object at the correspondinglocation. This step follows closely the findings of [14]. We consider differenttypes of blending techniques (Gaussian or linear blur, simple copy-pasting withno post-processing, or generating blur on the whole image to imitate motion),and randomly choose one of them in order to introduce a larger diversity ofblending artefacts. We also do not consider Poisson blending in our approach,which was considerably slowing down the data generation procedure. Unlike [14]and unlike our preliminary experiment described in Section 3.1, we do not usedistractors, which were found to be less important for our task than in [14].As a consequence, we do not need to exploit external data to perform dataaugmentation. Qualitative results are illustrated on Figure 4.
4 Experiments
In this section, we present experiments demonstrating the importance of contextmodeling for data augmentation. We evaluate our approach on the subset of theVOC’12 dataset that contains segmentation annotations, and study the impactof data augmentation when changing the amount of training data. In Section 4.1,we present data, tools, and evaluation metrics. In Section 4.2, we present im-plementation details that are common to all experiments, in order to make ourresults reproducible (the source code to conduct our experiments will also bemade publicly available in an open-source software package). First, we presentexperiments for object detectors trained on single categories in Section 4.3—thatis, detectors are trained individually for each object category, and an experimentfor the standard multiple-category setting is presented in Section 4.4. Finally,we present an ablation study in Section 4.5 to understand the effect of variousfactors (blending and placement strategies, amount of labeled data).
-
Context Data Augmentation for Object Detection 9
4.1 Dataset, Tools, and Metrics
Dataset. In all our experiments, we use a subset of the Pascal VOC’12 train-ing dataset [13] that contains segmentation annotations to train all our models(context-model and object detector). We call this training set VOC12train-seg,which contains 1 464 images. Following standard practice, we use the test set ofVOC’07 to evaluate the models, which contains 4 952 images with the same 20object categories as VOC’12. We call this image set VOC07-test.
Object detector. To test our data-augmentation strategy we chose one of thestate-of-the art object detectors with open-source implementation, BlitzNet [23]that achieves 79.1% mAP on VOC07-test when trained on the union of the fulltraining and validation parts of VOC’07 and VOC’12, namely VOC07-train+valand VOC12train+val (see [23]); this network is similar to the DSSD detector of[24] that was also used in the Focal Loss paper [37]. The advantage of such classof detectors is that it is relatively fast (it may work in real time) and supportstraining with big batches of images without further modification.
Evaluation metric. In VOC’07, a bounding box is considered to be correct if itsIntersection over Union (IoU) with a ground truth box is higher than 0.5. Themetric for evaluating the quality of detection for one object class is the averageprecision (AP), and the mean average precision (mAP) for the dataset.
4.2 Implementation Details
Selecting and blending objects. Since we widely use object instances extractedfrom the training images in all our experiments, we create a database of objectscut out from the VOC12train-seg set to quickly access them during training.For a given candidate box, an instance is considered as matching if after scalingit by a factor in [0.5, 1.5] the re-scaled instance’s bounding box fits inside thecandidate’s one and takes at least 80% of its area. When blending them into thenew background, we follow [14] and use randomly one of the following methods:adding Gaussian or linear blur on the object boundaries, generating blur on thewhole image by imitating motion, or just paste an image with no blending. Tonot introduce scaling artifacts, we keep the scaling factor close to 1.
Training the context model. After preparing the “contextual images” as de-scribed in 3.2, we re-scale them to the standard size 300 × 300 and stack themin batches of size 32. We use ResNet50 [36] with ImageNet initialization to traina contextual model in all our experiments. Since we have access only to thetraining set at any moment we train and apply the model on the same data. Toprevent overfitting, we use early stopping. In order to determine when to stopthe training procedure, we monitor both training error on our training set andvalidation error on the VOC’12 validation set VOC12-val. The moment whenthe loss curves start diverging noticeably is used as a stopping point. To this
-
10 N. Dvornik, J. Mairal and C. Schmid
end, when building context model for one class vs. background, we train a net-work for 1.5K iterations, then decrease the learning rate by a factor 10 and trainfor 500 additional iterations. When learning a joint contextual model for all 20categories, we first run the training procedure for 4K iterations and then for 2Kmore iterations after decreasing the learning rate. We sample 3 times more back-ground contextual images, as noted in Section 3.2. Visual examples of imagesproduced by the context model are presented in Figure 5. Overall, training thecontext model is about 5 times faster than training the detector.
Training the object detector. In this work, the detector takes images of size 300×300 as an input and produces a set of candidate object boxes with classificationscores; like our context model, it uses ResNet50 [36] pre-trained on ImageNet asa backbone. The detector is trained by following [23], with the ADAM optimizer[38] starting from learning rate 10−4 and decreasing it later during training bya factor 10 (see Sections 4.3 and 4.4 for the number of epochs used in eachexperiment). In addition to our data augmentation approach obtained by copy-pasting objects, all experiments also include classical data augmentation stepsobtained by random-cropping, flips, and color transformations, following [23].
4.3 Single-Category Object Detection
In this section, we conduct an experiment to better understand the effect of theproposed data augmentation approach, dubbed “Context-DA” in the differenttables, when compared to a baseline with random object placement “Random-DA”, and when compared to standard data augmentation techniques called“Base-DA”. The study is conducted in a single-category setting, where detec-tors are trained independently for each object category, resulting in a relativelysmall number of positive training examples per class. This allows us to evalu-ate the importance of context when few labeled samples are available and see ifconclusions drawn for a category easily generalize to other ones.
The baseline with random object placements on random backgrounds is con-ducted in a similar fashion as our context-driven approach, by following thestrategy described in the previous section. For each category, we treat all imageswith no object from this category as background images, and consider a collec-tion of cut instances as discussed in Section 4.1. During training, we augment anegative (background) image with probability 0.5 by pasting up to two instanceson it, either at randomly selected locations (Random-DA), or using our contextmodel in the selected bounding boxes with top scores (Context-DA). The in-stances are re-scaled by a random factor in [0.5, 2] and blended into an imageusing a randomly selected blending method mentioned in Section 4.1. For allmodels, we train the object detection network for 6K iterations and decrease thelearning rate after 2K and 4K iterations by a factor 10 each time. The resultsfor this experiment are presented in Table 1.
The conclusions are the following: random placement indeed hurts the per-formance on average. Only the category bird seems to benefit significantly fromit, perhaps because birds tend to appear in various contexts in this dataset and
-
Context Data Augmentation for Object Detection 11
some categories significantly suffer from random placement such as boat, table,and sheep. Importantly, the visual context model always improve upon the ran-dom placement one, on average by 5%, and upon the baseline that uses onlyclassical data augmentation, on average by 4%. Interestingly, we identify cate-gories for which visual context is crucial (aeroplane, bird, boat, bus, cat, cow,horse), for which context-driven data augmentation brings more than 5% im-provement and some categories that display no significant gain or losses (chair,table, persons, train), where the difference with the baseline is less than 1%.
Table 1. Comparison of detection accuracy on VOC07-test for the single-categoryexperiment. The models are trained independently for each category, by using the1 464 images from VOC12train-seg. The first row represents the baseline experimentthat uses standard data augmentation techniques. The second row uses in additioncopy-pasting of objects with random placements. The third row presents the resultsachieved by our context-driven approach and the last row presents the improvementit brings over the baseline. The numbers represent average precision per class in %.Large improvements over the baseline (greater than 5%) are in bold.
method aero bike bird boat bott. bus car cat chair cow table dog horse mbike pers. plant sheep sofa train tv avg.
Base-DA 58.8 64.3 48.8 47.8 33.9 66.5 69.7 68.0 40.4 59.0 61.0 56.2 72.1 64.2 66.7 36.6 54.5 53.0 73.4 63.6 58.0
Random-DA 60.2 66.5 55.1 41.9 29.7 66.5 70.0 70.1 37.4 57.4 45.3 56.7 68.3 66.1 67.0 37.0 49.9 55.8 72.1 62.6 56.9
Context-DA 67.0 68.6 60.0 53.3 38.8 73.3 72.4 74.3 39.7 64.3 61.4 60.3 77.6 69.0 67.3 38.6 56.2 56.9 74.4 66.8 62.0
Impr. Cont. 8.2 4.3 11.2 5.5 4.9 6.8 2.7 6.3 -0.7 5.3 0.4 4.1 5.5 4.8 0.6 2.0 1.7 3.9 1.0 3.2 4.0
Table 2. Comparison of detection accuracy on VOC07-test for the multiple-categoryexperiment. The model is trained on all categories at the same time, by using the 1 464images from VOC12train-seg. The first row represents the baseline experiment thatuses standard data augmentation techniques. The second row uses also our context-driven data augmentation. The numbers represent average precision per class in %.
method aero bike bird boat bott. bus car cat chair cow table dog horse mbike pers. plant sheep sofa train tv avg.
Base-DA 63.6 73.3 63.2 57.0 31.5 76.0 71.5 79.9 40.0 71.6 61.4 74.6 80.9 70.4 67.9 36.5 64.9 63.0 79.3 64.7 64.6
Context-DA 66.8 75.3 65.9 57.2 33.1 75.0 72.4 79.6 40.6 73.9 63.7 77.1 81.4 71.8 68.1 37.9 67.6 64.7 81.2 65.5 65.9
4.4 Multiple-Categories Object Detection
In this section, we conduct the same experiment as in 4.3, but we train a singlemultiple-category object detector instead of independent ones per category. Net-work parameters are trained with more labeled data (on average 20 times morethan for models learned in Table 4.3). The results are presented in Table 2 andshow a modest improvement of 1.3% on average over the baseline, which is rela-tively consistent across categories, with 18 categories out of 20 that benefit fromthe context-driven data augmentation. This confirms that data augmentation iscrucial when few labeled examples are available.
-
12 N. Dvornik, J. Mairal and C. Schmid
4.5 Ablation Study
Finally, we conduct an ablation study to better understand (i) the importance ofvisual context for object detection, (ii) the impact of blending artefacts, and (iii)the importance of data augmentation when using very few labeled examples. Forsimplicity, we choose the first 5 categories of VOC’12, namely aeroplane, bike,bird, boat, bottle, and train independent detectors per category as in Section 4.3,which corresponds to a setting where few samples are available for training.
Baseline when no object is in context. Our experiments show that augmentingnaively datasets with randomly placed objects slightly hurts the performance. Toconfirm this finding, we consider a similar experiment, by learning on the samenumber of instances as in Section 4.3, but we consider as positive examples onlyobjects that have been synthetically placed in a random context. This is achievedby removing from the training data all the images that have an object from thecategory we want to model, and replacing it by an instance of this object placedon a background image. The main motivation for such study is to consider theextreme case where (i) no object is placed in the right context; (ii) all objectsmay suffer from rendering artefacts. As shown in Table 3, the average precisiondegrades significantly by about 14% compared to the baseline. As a conclusion,either visual context is indeed crucial for learning, or blending artefacts is alsoa critical issue. The purpose of the next experiment is to clarify this ambiguity.
Impact of blending when the context is right. In the previous experiment, wehave shown that the lack of visual context and the presence of blending arte-facts may explain the performance drop observed on the fourth row of Table 3.Here, we propose a simple experiment showing that blending artefacts are notcritical when objects are placed in the right context: the experiment consists ofextracting each object instance from the dataset, up-scale it by a random factorslightly greater than one (in the interval [1.2, 1.5]), and blend it back at the samelocation, such that it covers the original instance. As a result, the new datasetbenefits slightly from data augmentation (thanks to object enlargement), but italso suffers from blending artefacts for all object instances. As shown on the fifthrow of Table 3, this approach improves over the baseline, though not as much asthe full context-driven data augmentation, which suggests that the lack of visualcontext was the key explaining the result observed before. The experiment alsoconfirms that the presence of blending artefacts is not critical for the objectdetection task. Visual examples of such artefacts are presented in Figure 6.
Performance with very few labeled data. Finally, the last four rows of Table 3present our results when reducing the amount of labeled data, in a setting wherethis amount is already small when using all training data. The improvementprovided by our approach is significant and consistent (about 6% when using only50% and 25% of the training data). Even though one may naturally expect largerimprovements when a very small number of training examples are available, itshould be noted that in such very small regimes, the quality of the context model
-
Context Data Augmentation for Object Detection 13
may degrade as well (e.g., the dataset contains only 87 images of birds, meaningthat with 25%, we use only 22 images with positive instances).
Table 3. Ablation study on the first five categories of VOC’12. All models are learnedindependently as in Table 1. We compare classical data augmentation techniques (Base-DA), approaches obtained by copy-pasting objects, either randomly (Random-DA) oraccording to a context model (Context-DA). The line “Removing context” correspondsto the first experiment described in Section 4.5; Enlarge-Reblend corresponds to thesecond experiment, and the last four rows compare the performance of Base-DA andContext-DA when varying the amount of training data from 50% to 25%.
Data portion aero bike bird boat bottle average
Base-DA 58.8 64.3 48.8 47.8 33.9 48.7Random-DA 60.2 66.5 55.1 41.9 29.7 48.3Context-DA 67.0 68.6 60.0 53.3 38.8 57.5
Removing context 44.0 46.8 42.0 20.9 15.5 33.9
Enlarge + Reblend-DA 60.1 63.4 51.6 48.0 34.8 51.6
Base-DA 50 % 55.6 60.1 47.6 40.1 21.0 42.2Context-DA 50 % 62.2 65.9 55.2 46.9 27.2 48.8Base-DA 25 % 51.3 54.0 33.8 28.2 14.0 32.5Context-DA 25 % 57.8 59.5 40.6 34.3 19.0 38.3
5 Discussions and Future Work
In this paper, we introduce a data augmentation technique dedicated to ob-ject detection, which exploits segmentation annotations. From a methodologicalpoint of view, we show that this approach is effective and goes beyond traditionalaugmentation approaches. One of the keys to obtain significant improvements interms of accuracy was to introduce an appropriate context model which allowsus to automatically find realistic locations for objects, which can then be pastedand blended at in the new scenes. While the role of explicit context modelinghas been unclear so far for object detection, we show that it is in fact crucialwhen performing data augmentation and learn with few labeled data, which isone of the major issue that deep learning models are facing today.
We believe that these promising results pave the way to numerous extensions.In future work, we will for instance study the application of our approach toother scene understanding tasks, e.g., semantic or instance segmentation, andinvestigate how to adapt it to larger datasets. Since our approach relies on pre-segmented objects, which are subsequently used for data augmentation, we arealso planning to exploit automatic segmentation tools such as [39] in order touse our method when only bounding box annotations are available.
Acknowledgments. This work was supported by a grant from ANR (MAC-ARON project ANR-14-CE23-0003-01), by the ERC grant 714381 (SOLARISproject), the ERC advanced grant ALLEGRO and gifts from Amazon and Intel.
-
14 N. Dvornik, J. Mairal and C. Schmid
Fig. 5. Examples of instance placement with context model guidance. Thefigure presents samples obtained by placing a matched examples into the box predictedby the context model. The top row shows generated images that are visually almostindistinguishable from the real ones. The middle row presents samples of good qualityalthough with some visual artifacts. For the two leftmost examples, the context moduleproposed an appropriate object class, but the pasted instances do not look visuallyappealing. Sometimes, the scene does not look natural because of the segmentationartifacts as in the two middle images. The two rightmost examples show exampleswhere the category seems to be in the right environment, but not perfectly placed. Thebottom row presents some failure cases.
Fig. 6. Illustration of artifacts arising from enlargement augmentation. Inthe enlargement data augmentation, an instance is cut out of the image, up-scaled bya small factor and placed back at the same location. This approach leads to blend-ing artefacts. Modified images are given in the top row. Zoomed parts of the imagescentered on blending artifacts are presented in the bottom line.
-
Context Data Augmentation for Object Detection 15
References
1. Oliva, A., Torralba, A.: The role of context in object recognition. Trends incognitive sciences (12) (2007) 520–527
2. Divvala, S.K., Hoiem, D., Hays, J.H., Efros, A.A., Hebert, M.: An empirical studyof context in object detection. In: Proceedings of the IEEE Conference on Com-puter Vision and Pattern Recognition (CVPR). (2009)
3. Murphy, K., Torralba, A., Eaton, D., Freeman, W.: Object detection and localiza-tion using local and global features. In: Toward Category-Level Object Recognition.(2006) 382–400
4. Felzenszwalb, P.F., Girshick, R.B., McAllester, D., Ramanan, D.: Object detectionwith discriminatively trained part-based models. IEEE transactions on PatternAnalysis and Machine Intelligence (PAMI) 32(9) (2010) 1627–1645
5. Park, D., Ramanan, D., Fowlkes, C.: Multiresolution models for object detection.In: Proceedings of the European Conference on Computer Vision (ECCV). (2010)
6. Heitz, G., Koller, D.: Learning spatial context: Using stuff to find things. In:Proceedings of the European Conference on Computer Vision (ECCV). (2008)
7. Ren, S., He, K., Girshick, R., Sun, J.: Faster R-CNN: Towards real-time objectdetection with region proposal networks. In: Advances in Neural Information Pro-cessing Systems (NIPS). (2015)
8. Girshick, R.: Fast R-CNN. In: Proceedings of the International Conference onComputer Vision (ICCV). (2015)
9. Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S., Fu, C.Y., Berg, A.C.:SSD: Single shot multibox detector. In: Proceedings of the European Conferenceon Computer Vision (ECCV). (2016)
10. Redmon, J., Divvala, S., Girshick, R., Farhadi, A.: You only look once: Unified,real-time object detection. In: Proceedings of the IEEE Conference on ComputerVision and Pattern Recognition (CVPR). (2016)
11. Yu, R., Chen, X., Morariu, V.I., Davis, L.S.: The role of context selection in objectdetection. In: British Machine Vision Conference (BMVC). (2016)
12. Srivastava, N., Hinton, G., Krizhevsky, A., Sutskever, I., Salakhutdinov, R.:Dropout: A simple way to prevent neural networks from overfitting. The Jour-nal of Machine Learning Research 15(1) (2014) 1929–1958
13. Everingham, M., Van Gool, L., Williams, C.K., Winn, J., Zisserman, A.: ThePASCAL visual object classes (VOC) challenge. International Journal of ComputerVision (IJCV) 88(2) (2010) 303–338
14. Dwibedi, D., Misra, I., Hebert, M.: Cut, paste and learn: Surprisingly easy syn-thesis for instance detection. In: Proceedings of the International Conference onComputer Vision (ICCV). (2017)
15. Gupta, A., Vedaldi, A., Zisserman, A.: Synthetic data for text localisation innatural images. In: Proceedings of the IEEE Conference on Computer Vision andPattern Recognition (CVPR). (2016)
16. Georgakis, G., Mousavian, A., Berg, A.C., Kosecka, J.: Synthesizing training datafor object detection in indoor scenes. arXiv preprint arXiv:1702.07836 (2017)
17. Torralba, A., Sinha, P.: Statistical context priming for object detection. In: Pro-ceedings of the International Conference on Computer Vision (ICCV). (2001)
18. Torralba, A.: Contextual priming for object detection. International Journal ofComputer Vision (IJCV) 53(2) (2003) 169–191
19. Choi, M.J., Lim, J.J., Torralba, A., Willsky, A.S.: Exploiting hierarchical contexton a large database of object categories. In: Proceedings of the IEEE Conferenceon Computer Vision and Pattern Recognition (CVPR). (2010)
-
16 N. Dvornik, J. Mairal and C. Schmid
20. Gould, S., Fulton, R., Koller, D.: Decomposing a scene into geometric and se-mantically consistent regions. In: Proceedings of the International Conference onComputer Vision (ICCV). (2009)
21. Chu, W., Cai, D.: Deep feature based contextual model for object detection.Neurocomputing 275 (2018) 1035–1042
22. Bell, S., Zitnick, C.L., Bala, K., Girshick, R.: Inside-outside net: Detecting objectsin context with skip pooling and recurrent neural networks. In: Proceedings of theIEEE Conference on Computer Vision and Pattern Recognition (CVPR). (2016)
23. Dvornik, N., Shmelkov, K., Mairal, J., Schmid, C.: Blitznet: A real-time deepnetwork for scene understanding. In: Proceedings of the International Conferenceon Computer Vision (ICCV). (2017)
24. Fu, C.Y., Liu, W., Ranga, A., Tyagi, A., Berg, A.C.: DSSD: Deconvolutional singleshot detector. arXiv preprint arXiv:1701.06659 (2017)
25. Barnea, E., Ben-Shahar, O.: On the utility of context (or the lack thereof) forobject detection. arXiv preprint arXiv:1711.05471 (2017)
26. Yao, B., Fei-Fei, L.: Modeling mutual context of object and human pose in human-object interaction activities. In: Proceedings of the IEEE Conference on ComputerVision and Pattern Recognition (CVPR). (2010)
27. Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S., Ma, S., Huang, Z.,Karpathy, A., Khosla, A., Bernstein, M., Berg, A.C., Fei-Fei, L.: ImageNet largescale visual recognition challenge. Proceedings of the International Conference onComputer Vision (ICCV) (2015)
28. Frid-Adar, M., Klang, E., Amitai, M., Goldberger, J., Greenspan, H.: Syntheticdata augmentation using gan for improved liver lesion classification. arXiv preprintarXiv:1801.02385 (2018)
29. Peng, X., Sun, B., Ali, K., Saenko, K.: Learning deep object detectors from 3d mod-els. In: Proceedings of the International Conference on Computer Vision (ICCV).(2015)
30. Zhong, Z., Zheng, L., Kang, G., Li, S., Yang, Y.: Random erasing data augmenta-tion. arXiv preprint arXiv:1708.04896 (2017)
31. Karsch, K., Hedau, V., Forsyth, D., Hoiem, D.: Rendering synthetic objects intolegacy photographs. ACM Transactions on Graphics (TOG) 30(6) (2011) 157
32. Movshovitz-Attias, Y., Kanade, T., Sheikh, Y.: How useful is photo-realistic ren-dering for visual learning? In: Proceedings of the European Conference on Com-puter Vision (ECCV). (2016)
33. Su, H., Qi, C.R., Li, Y., Guibas, L.J.: Render for cnn: Viewpoint estimation inimages using cnns trained with rendered 3d model views. In: Proceedings of theInternational Conference on Computer Vision (ICCV). (2015)
34. Prez, P., Gangnet, M., Blake, A.: Poisson image editing. ACM Transactions onGraphics (SIGGRAPH’03) 22(3) (2003) 313–318
35. Lin, T.Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ramanan, D., Dollár, P.,Zitnick, C.L.: Microsoft COCO: Common objects in context. In: Proceedings ofthe European Conference on Computer Vision (ECCV). (2014)
36. He, K., Zhang, X., Ren, S., Sun, J.: Deep residual learning for image recognition. In:Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition(CVPR). (2016)
37. Lin, T.Y., Goyal, P., Girshick, R., He, K., Dollár, P.: Focal loss for dense objectdetection. In: Proceedings of the International Conference on Computer Vision(ICCV). (2017)
38. Kingma, D., Ba, J.: Adam: A method for stochastic optimization. In: InternationalConference on Learning Representations (ICLR). (2015)
-
Context Data Augmentation for Object Detection 17
39. Liao, Z., Farhadi, A., Wang, Y., Endres, I., Forsyth, D.: Building a dictionary ofimage fragments. In: IEEE Conference on Computer Vision and Pattern Recogni-tion (CVPR). (2012)
Related Documents