2013 年 8 月 电 工 技 术 学 报 Vol.28 No. 8 第 28 卷第 8 期 TRANSACTIONS OF CHINA ELECTROTECHNICAL SOCIETY Aug. 2013 光伏阵列最大功率跟踪变论域模糊控制 任海鹏 郭 鑫 杨 彧 李 洁 (西安理工大学自动化与信息工程学院 西安 710048) 摘要 光伏阵列的输出功率随着环境条件和负载改变而变化,为了充分利用光伏阵列的输出, 需对其进行最大功率跟踪控制 本文用变论域模糊控制方法实现最大功率跟踪控制,该方法利用 论域收缩因子,在保证响应快速性的前提下,提高了稳态跟踪精度 本文方法与扰动观察法和基 本模糊控制方法进行了对比研究,结果表明本文方法能够获得更快的响应速度,更高的跟踪精度 和更大的功率输出,更适合进行光伏阵列的最大功率跟踪控制 关键词:光伏阵列 最大功率点跟踪控制 变论域模糊控制 跟踪精度 中图分类号:TM615 Maximum Power Point Tracking of Photovoltaic Array Using Variable Universe Fuzzy Controller Ren Haipeng Guo Xin Yang Yu Li Jie (Xi’an University of Technology Xi’an 710048 China) Abstract The output power of photovoltaic (PV) array varies with the changes of the environment and the load. Maximum power tracking control is used to take full advantage of the photovoltaic array. The variable universe fuzzy control method is proposed to implement maximum power tracking control. In order to improve the tracking accuracy and to guarantee the quick response, the universe shrinking factor is used to change the input fuzzy variable universe according to the tracking error. A comparison study is performed for the perturb and observe (P&O) method, the basic fuzzy control and the variable universe fuzzy control. The simulation and experimental results show that the proposed method can obtain a faster tracking speed, a higher tracking accuracy and a larger power output. The proposed method is suitable for PV array maximum power tracking control. Keywords:PV array, maximum power tracking control, variable universe fuzzy control, tracking accuracy 1 引言 太阳能是新能源与再生能源的重要组成部分, 其开发利用不仅带来很好的社会效益和环境效益, 而且 有明显的经济价值。通常采用太阳电池阵列 将太阳能转 为电能,太阳电池阵列也称为光伏阵 列,它具有明显的非线性特性,其输出电流随着日 照强度和电池结温的变化而变化。因此在特定的工 国家自然科学基金(50907054),高等学校博士学科点专项科研基 金(20126118110008),陕西省科学技术研究发展计划(2011kjxx18) 和西安市产业技术创新计划(CX12185-1)资助项目。 收稿日期 2010-06-08 改稿日期 2013-04-10 作环境下光伏电池只存在唯一的最大功率输出点。 自然光的辐射强度和环境温度会不断变化,为了使 光伏阵列获得最大功率输出,需要进行最大功率输 出点跟踪(Maximum Power Point Tracking MPPT) 控制。 最初的光伏阵列输出控制方法是恒定电压法 (Constant Voltage Tracking, CVT),该方法控制输 出电压恒定在事先计算的理论最大功率点处,其优 点是控制简单,但工作状态不能跟随环境变化,无 法充分利用光伏阵列的转 能力。假设光伏阵列的 最大功率点电压与其开路电压之间存在着近似的线 性关系,可以通过测量开路电压近似确定最大功率

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
2013 年 8 月 电 工 技 术 学 报 Vol.28 No. 8
第 28 卷第 8期 TRANSACTIONS OF CHINA ELECTROTECHNICAL SOCIETY Aug. 2013
光伏阵列最大功率跟踪变论域模糊控制
任海鹏 郭 鑫 杨 彧 李 洁 (西安理工大学自动化与信息工程学院 西安 710048)
摘要 光伏阵列的输出功率随着环境条件和负载改变而变化,为了充分利用光伏阵列的输出,
需对其进行最大功率跟踪控制。本文用变论域模糊控制方法实现最大功率跟踪控制,该方法利用
论域收缩因子,在保证响应快速性的前提下,提高了稳态跟踪精度。本文方法与扰动观察法和基
本模糊控制方法进行了对比研究,结果表明本文方法能够获得更快的响应速度,更高的跟踪精度
和更大的功率输出,更适合进行光伏阵列的最大功率跟踪控制。
关键词:光伏阵列 最大功率点跟踪控制 变论域模糊控制 跟踪精度
中图分类号:TM615
Maximum Power Point Tracking of Photovoltaic Array Using Variable Universe Fuzzy Controller
Ren Haipeng Guo Xin Yang Yu Li Jie
(Xi’an University of Technology Xi’an 710048 China)
Abstract The output power of photovoltaic (PV) array varies with the changes of the environment
and the load. Maximum power tracking control is used to take full advantage of the photovoltaic array.
The variable universe fuzzy control method is proposed to implement maximum power tracking control.
In order to improve the tracking accuracy and to guarantee the quick response, the universe shrinking
factor is used to change the input fuzzy variable universe according to the tracking error. A comparison
study is performed for the perturb and observe (P&O) method, the basic fuzzy control and the variable
universe fuzzy control. The simulation and experimental results show that the proposed method can
obtain a faster tracking speed, a higher tracking accuracy and a larger power output. The proposed method
is suitable for PV array maximum power tracking control.
Keywords:PV array, maximum power tracking control, variable universe fuzzy control, tracking
accuracy
1 引言
太阳能是新能源与再生能源的重要组成部分,
其开发利用不仅带来很好的社会效益和环境效益,
而且还有明显的经济价值。通常采用太阳电池阵列
将太阳能转换为电能,太阳电池阵列也称为光伏阵
列,它具有明显的非线性特性,其输出电流随着日
照强度和电池结温的变化而变化。因此在特定的工
国家自然科学基金(50907054),高等学校博士学科点专项科研基金(20126118110008),陕西省科学技术研究发展计划(2011kjxx18)和西安市产业技术创新计划(CX12185-1)资助项目。 收稿日期 2010-06-08 改稿日期 2013-04-10
作环境下光伏电池只存在唯一的最大功率输出点。
自然光的辐射强度和环境温度会不断变化,为了使
光伏阵列获得最大功率输出,需要进行最大功率输
出点跟踪(Maximum Power Point Tracking MPPT)
控制。
最初的光伏阵列输出控制方法是恒定电压法
(Constant Voltage Tracking, CVT),该方法控制输
出电压恒定在事先计算的理论最大功率点处,其优
点是控制简单,但工作状态不能跟随环境变化,无
法充分利用光伏阵列的转换能力。假设光伏阵列的
最大功率点电压与其开路电压之间存在着近似的线
性关系,可以通过测量开路电压近似确定最大功率
14 电 工 技 术 学 报 2013 年 8月
点电压,控制输出电压工作在该点来实现最大功率
跟踪控制的方法叫开路电压比例法 [1]。类似地,假
设短路电流与最大功率点电流近似成正比,可以得
到短路电流比例法 [2]。这两种方法需要断开负载测
量光伏阵列的开路电压或短路电流,会造成能量损
失。应用较多的最大功率输出点跟踪控制方法是扰
动观察法[3](Perturb and Observe Method,P&O),
该方法通过不断扰动(占空比)输出电压,使阵列
输出功率趋于最大,是一种真正意义上的最大功率
跟踪控制方法。其优点是结构简单,实时性好 [4-6]。
其缺点在于调节步长需要根据经验反复调整,而且
调节步长的选取对跟踪精度和速度有较大的影响[7]。
针对这种方法存在的问题,文献[8-13]提出一些改进
方法,针对不同的情况,不同程度地改善扰动观察
法的性能。增量电导法[14,15](Incremental Conducta-
nce, INC)利用太阳电池阵列的 P-U 特性曲线是一
个单峰曲线且在最大功率点处功率对输出电压的导
数为零的特点,通过判断功率对电压变化率来进行
占空比调节,实现最大功率跟踪,该方法调节原理
本质上与扰动观察法相同,但该方法需要在控制器
中计算微分,容易引入干扰,同时,在传感器精度
有限的条件下,最大功率点条件很难满足 [7,15]。模
糊控制能够充分利用人的控制经验,能够根据输出
功率的变换情况,改变占空比(电压)扰动量,在
一定程度上解决了扰动观察法调节步长与控制精度
之间的矛盾,也不需要判断增量电导法的结束条件,
减小了稳态振荡的幅值,能够得到很好的效果 [16]。
但是由于传统模糊控制语言变量划分是有限的,
因此步长的变化档级有限,性能改善有限。本文利
用变论域模糊控制更好地解决响应速度和稳态精度
的矛盾。与基本模糊控制相比,由于论域伸缩因子
的存在,变论域模糊控制器可以根据实际输出的情
况不断动态调整论域大小,从而兼顾响应速度和稳
态精度[21],可以设计出初始的调节速度更快,稳态
的调节精度更高的最大功率跟踪控制器。仿真和实
验结果表明:变论域模糊最大输出功率点跟踪控制
比基本模糊控制和扰动观察法响应速度更快,控制
精度更高,输出功率更大,是一种更好的最大功率
点跟踪控制方法。
2 光伏阵列的数学模型和特性
当考虑太阳辐射强度和温度变化时,光伏阵列
的数学模型[17,18]可表示为
2 OCsc 11 e 1
V V
C VI I C I
(1)
其中
scref ref
1R R
I T IR R
(2)
SV T R I (3)
c refT T T (4)
定义参考条件为日射(太阳辐射)强度 Rref=
1kW/m2,电池温度 Tref=25℃,Isc为在参考条件下的
短路电流,VOC为在参考条件下开路电压;为在参考日照下电流变化的温度系数( A/℃);为在参考日照下电压变化的温度系数(V/℃);RS 为光伏模块的
串联电阻()。
C1、C2和 Tc可以表示为
m
2 OCm1
sc
1 e
V
C VIC
I
(5)
1m m2
OC sc
1 ln 1V I
CV I
(6)
c a cT T t R (7)
式中,Im、Vm 为最大功率点处对应的电流和电压;
R 为太阳辐射强度(W/m2);Ta 为环境温度(℃); tc
为光伏电池模块的温度系数 (℃·m2/W)。
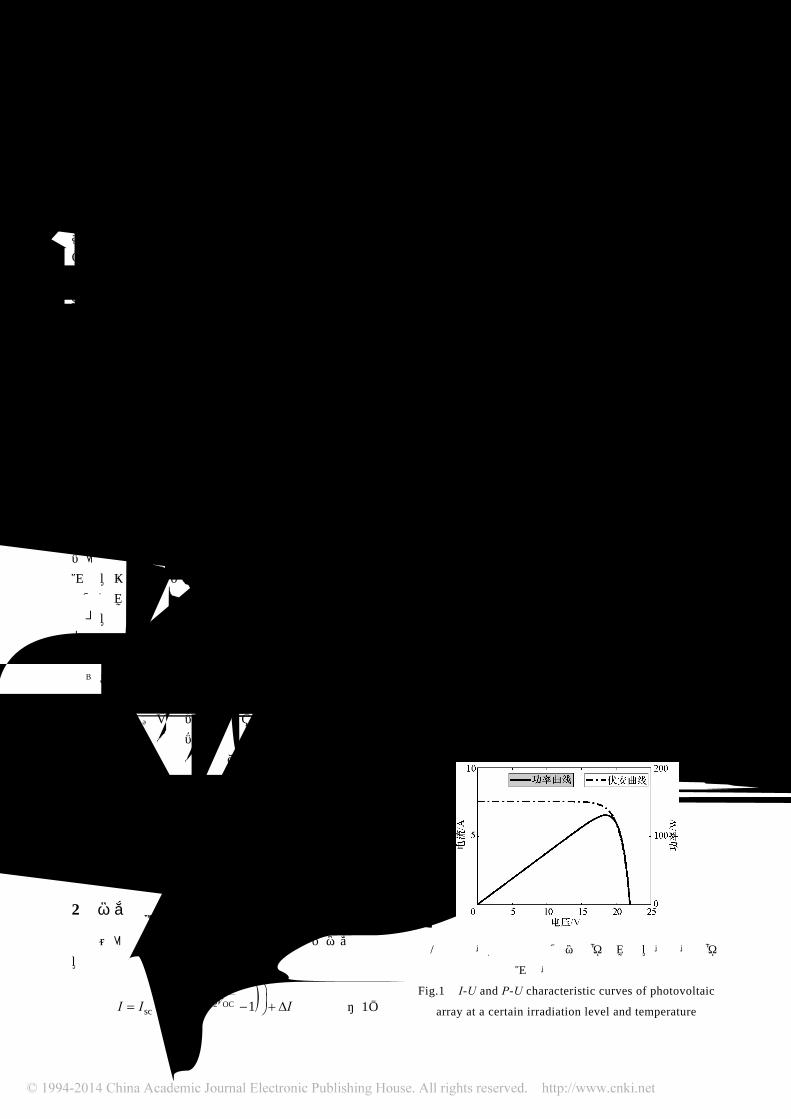
光伏阵列在特定环境下的输出特性(I-U 特性
和 P-U特性)曲线如图 1所示,可见,在特定(光
照强度和温度)环境条件下,有唯一的最大功率点。
研究表明[19]:阳光越强,光伏阵列的输出功率也就
越高;随着光照强度的降低,伏安特性曲线的形状
基本不变,只是短路电流逐渐变小,开路电压变化
不大;光伏阵列的开路电压随温度增加而降低,短
图 1 太阳电池阵列在一定光照和温度下的电流电压和
功率电压特性曲线
Fig.1 I-U and P-U characteristic curves of photovoltaic
array at a certain irradiation level and temperature
第 28 卷第 8期 任海鹏等 光伏阵列最大功率跟踪变论域模糊控制 15
路电流基本不变。在外界条件改变的情况下,其最
大功率点也随之改变,因此设计最大功率跟踪控制,
对充分发挥太阳电池的作用,提高能源利用率具有
重要意义。
3 变论域模糊控制器的设计
一般模糊控制器模糊变量和规则设计的越多,
系统控制性能会越好[20]。但是随着模糊变量和规则
个数的增加,模糊控制器也将变得越来越复杂,难
以实现。所谓变论域模糊控制,就是在规则不变的
前提下,论域随着误差变小而收缩,相当于控制
规则的增加,使得模糊逼近更加精细,是一种自
适应模糊控制器,只要所设计的控制规则满足一
致性条件,响应的速度和控制的精度都能够得到
大幅提高 [21]。
本文设计的模糊控制器有两个输入变量和一个
输出变量,输入变量分别为前一次占空比变化量
( 1)d n 和本次功率变化量 ( ) ( ) ( 1)P n P n P n ,
其中 ( )P n 为当前时刻光伏阵列输出功率, ( 1)P n 为
前一时刻光伏阵列输出功率;输出变量为本次占空
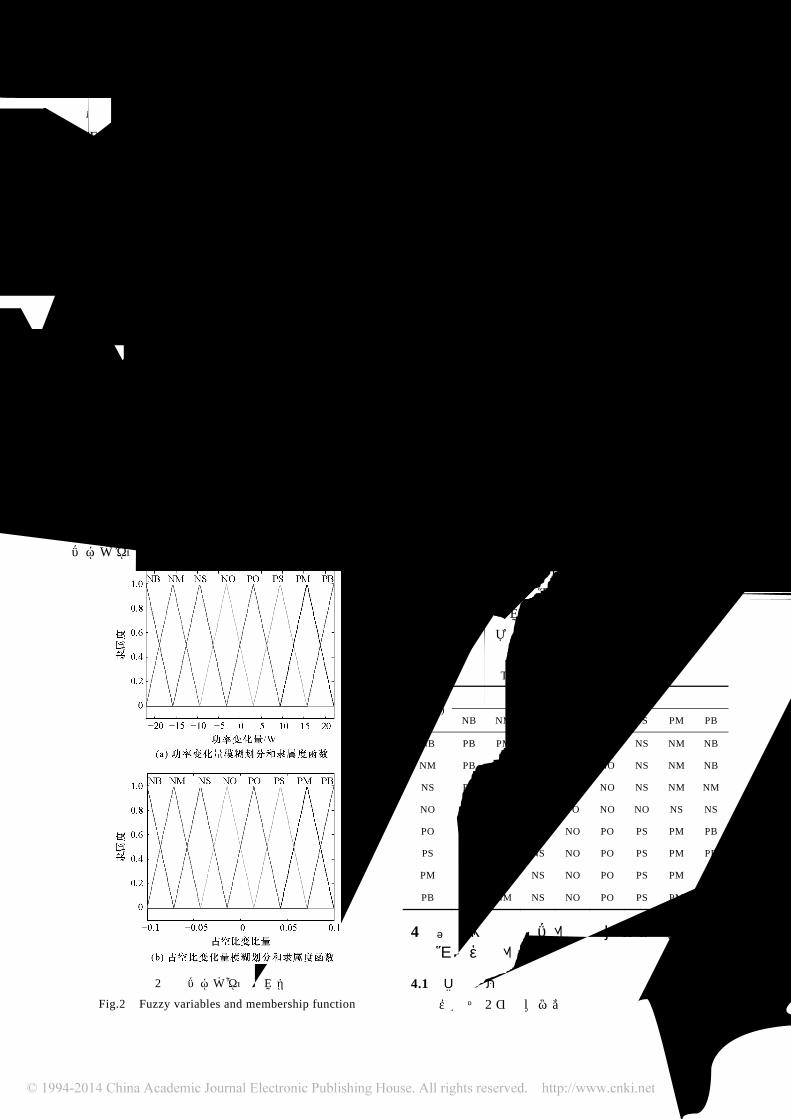
比变化量 ( )d n 。功率变化量和占空比变化量的模
糊划分和隶属度函数如图 2所示,图 2a为功率变化
图 2 模糊划分和隶属度函数图
Fig.2 Fuzzy variables and membership function
量隶属度函数,图 2b 为占空比变化量隶属度函数。
输出占空比变化量隶属度函数与输入的上一次占空
比变化量隶属度函数相同。
模糊规则的设计原则如下:如上次调节使得输
出功率增大,则继续向该方向调节,功率变化量越
大,本次占空比变化量越大;如上次调节使得输出
功率减小,则向相反方向调节,功率变化量越小,
本次占空比变化量越小。模糊规则的形式为: IF A
AND B THEN C,根据上述原则得到的模糊规则见
表 1,去模糊化的方法为重心法。
变论域方法如下:设输入变量 x 的初始论域为
[-E,E],E为实数,变论域模糊控制器中通过伸缩
因子 a(x)将论域变换为[-a(x) E,a(x)E],其中 a(x)
是输入变量 x的连续函数,满足 a(x)∈[0, 1]。本文
中变论域模糊控制收缩因子选择自然指数型收缩
因子
2( ) 1 e kxx c
式中,c取 0.65;k取 10。
论域的大小随着输入的变化而变化,虽然模糊
规则本身没有改变,但是随着输入变量论域的变化,
模糊集合也发生了变化,间接影响是模糊规则发生
了变化,模糊控制器也发生了相应的变化。这样就
可以实现在距离最大功率点较远时,采用更大的步
长,加快响应速度;而在最大功率点附近,用更小
的步长,来提高稳态精度,减小稳态振荡。
表 1 模糊控制规则表
Tab.1 Fuzzy rules table
d(n-1)P(n)
NB NM NS NO PO PS PM PB
NB PB PM PS PO NO NS NM NB
NM PB PM PS PO NO NS NM NB
NS PB PM PS PO NO NS NM NM
NO PB PM PS PO NO NO NS NS
PO NS NS NO NO PO PS PM PB
PS NM NM NS NO PO PS PM PB
PM NB NM NS NO PO PS PM PB
PB NB NM NS NO PO PS PM PB
4 基于变论域模糊控制器的光伏阵列最大功率跟踪控制系统
4.1 仿真研究
根据第 2 节中的光伏阵列数学模型和第 3 节中
16 电 工 技 术 学 报 2013 年 8月
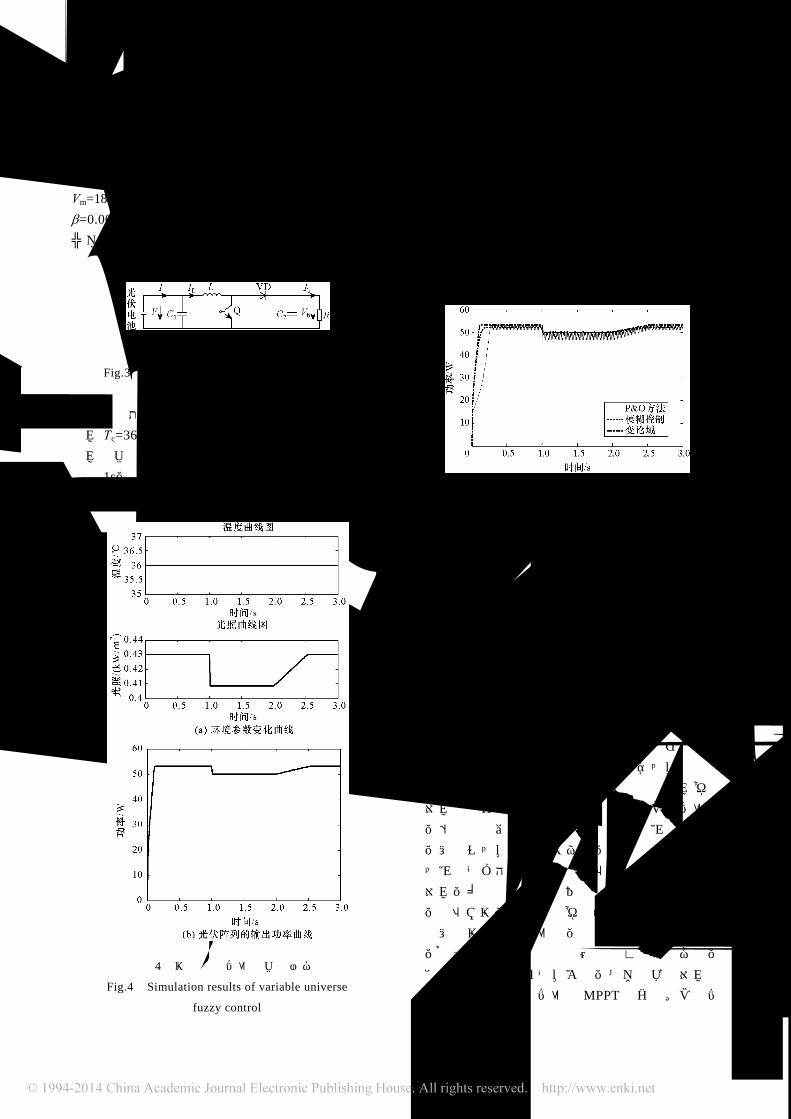
设计的变论域模糊控制器,采用的变换器电路如
图 3 所示, Boost 变换器参数为 C1=470F,
C2=100 470F,L=1mH, R=117,利用开关平均
模型对 Boost 建模。仿真所用光伏阵列的参数为:
Vm=18V,Im=7.23A,Voc=22V,Isc=7.56A,=0.074 8V/℃,
=0.001 512A/℃,Rs=0.2。在 Matlab/Simulink中
建立完整的光伏阵列最大功率跟踪控制系统仿真
模型。
图 3 光伏阵列输出级 Boost 变换器
Fig.3 Boost converter connected to the output
of the PV array
仿真初始状态为日射强度 R=430W/m2 和电池
温度 Tc=36℃,开关器件的初始占空比为 0.5。日射
强度在仿真的时间为 1s 时突减 5%,之后保持不变
运行 1s,在仿真时间为 2s时,日射强度缓慢上升至
初始强度后保持稳定,上升时间为 0.5s。环境参数
图 4 变论域模糊控制仿真结果
Fig.4 Simulation results of variable universe
fuzzy control
变化曲线和利用变论域模糊控制实现最大功率跟踪
控制仿真的功率输出曲线如图 4所示:图 4a为环境
参数变化曲线,图 4b采用变论域模糊控制的功率输
出曲线。结果说明变论域模糊控制方法能够快速的
跟踪光伏系统最大输出功率。
为了比较扰动观察法、基本模糊控制方法与变
论域模糊控制方法的性能,设计了对比仿真试验,
采用扰动观察法、基本模糊控制法和变论域模糊控
制进行对比仿真的结果如图 5所示。
图 5 三种方法的光伏电池功率曲线对比图
Fig.5 Three methods of photovoltaic cell power curve
comparison chart
图 5的仿真过程中,环境参数变化曲线与图 4a
相同,三种方法所用电池和变换器的参数相同,扰
动观察法的调节步长取 0.01,基本模糊控制器和变
论域模糊控制器的模糊规则表相同,初始隶属度函
数也相同。定量计算的三种方法的输出电功见表 2。
由图 5 和表 2 可见,变论域模糊控制方法响应速度
最快,稳态无振荡,精度最高。进一步分析可知,
为了保证稳态的振荡比较小,扰动观察方法的占空
比变化量不能太大,这里取 0.01;然而,占空比变
化量小会导致其在远离最大功率点时,调节速度较
慢;采用大占空比变化量,又会导致过大的稳态振
荡。因此,定步长的扰动观察方法中响应速度和稳
态精度是一对无法调和的矛盾。采用基本模糊控制
器,可以应用不同的规则,在距离最大功率点较远
时,采用较大的占空比变化量,加快响应速度;在
最大功率点附近,采用较小占空比变化量,提高稳
态精度,减小稳态振荡。但是由于模糊划分的有限
性,占空比变化量的范围和模糊插值[20]的精度都有
限。采用变论域模糊控制,论域随误差的变小而收
缩,局部地看论域的收缩相当于增加了控制规则,
也就是增加的插值节点的个数,从而提高了精度。
直观地解释变论域模糊控制 MPPT相对于基本模糊
第 28 卷第 8期 任海鹏等 光伏阵列最大功率跟踪变论域模糊控制 17
控制 MPPT的优点是:①在变论域模糊控制器的初
始论域范围与模糊控制器的论域范围相同(相同 E)
的情况下,变论域模糊控制可以在初始调节速度与
模糊控制相同的前提下,在近稳态时比基本模糊控
制器占空比变化量调节更加精细,因此可以在最大
功率点附近更加精细低调节,得到更准确的最大功
率点,同时调节过程更加平滑;②变论域模糊控制
器的初始论域范围可以比基本模糊控制的论域范围
更大,这样可以在提高变论域模糊控制器(在远离
最大功率点时)的初始调节速度,从而提高响应速
度,同时通过调整论域变化因子,在稳态时获得与
基本模糊控制器相当或更高的调节精度。因此,变
论域模糊控制是一种更好的最大功率跟踪控制器。
本文主要利用了其第一个特点。
表 2 三种 MPPT 方法的定量比较
Tab 2 Quantitative comparison of three MPPT methods
方法 仿真时间/s 电功/J
扰动观察法 3 145.663 1
传统模糊控制 3 151.656 2
变论域模糊控制 3 153.664 6
4.2 实验结果
系统硬件由光伏电池阵列,DC-DC变换器电路、
控制电路和上位机构成。光伏电池板选用硅单晶板,
其最大功率点处电压、电流、开路电压及短路电流
等参数与仿真所用参数一致。设计了以飞思卡尔
(Freescale)公司的 MC9S12DG128 单片机为核心
的控制电路,基于霍尔元件的太阳电池输出电压和
电流隔离检测电路,基于 M57962L光耦合器的功率
器件驱动电路。单片机通过串口与上位机相连,上
位机的作用是存储重要变量、显示变量变化曲线和
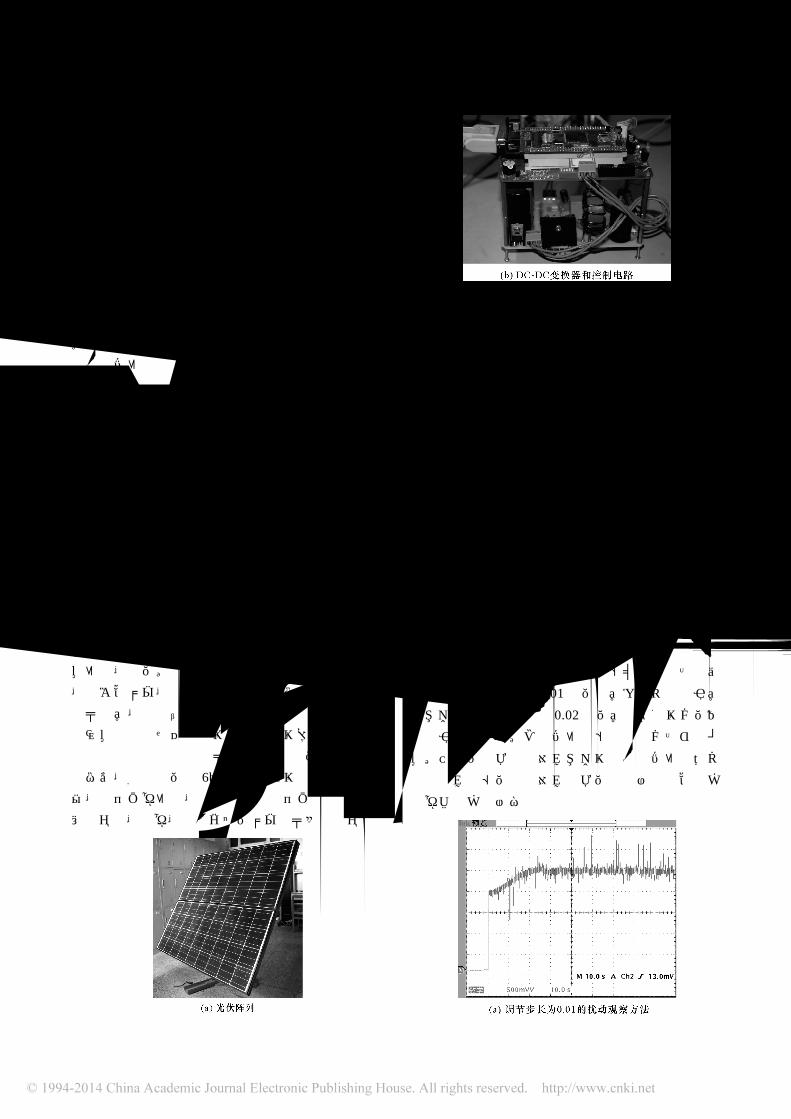
系统运行状态。系统硬件如图 6 所示,其中图 6a
为光伏电池阵列,图 6b为 DC-DC变换器电路(下
层电路板)和控制电路(上层电路板)。实验之前,
采用标准电压和电流源对霍尔检测元件进行了标定。
图 6 硬件电路实物照片
Fig.6 Hardware picture
值得说明的是 MC9S12DG128 单片机具有模糊
指令可以方便地定义模糊变量和隶属度函数,并进
行模糊推理和去模糊计算,极大地方便了模糊控制
程序的设计。在单片机软件中设计扰动观察方法,
基本模糊控制方法和变论域模糊控制方法的程序,
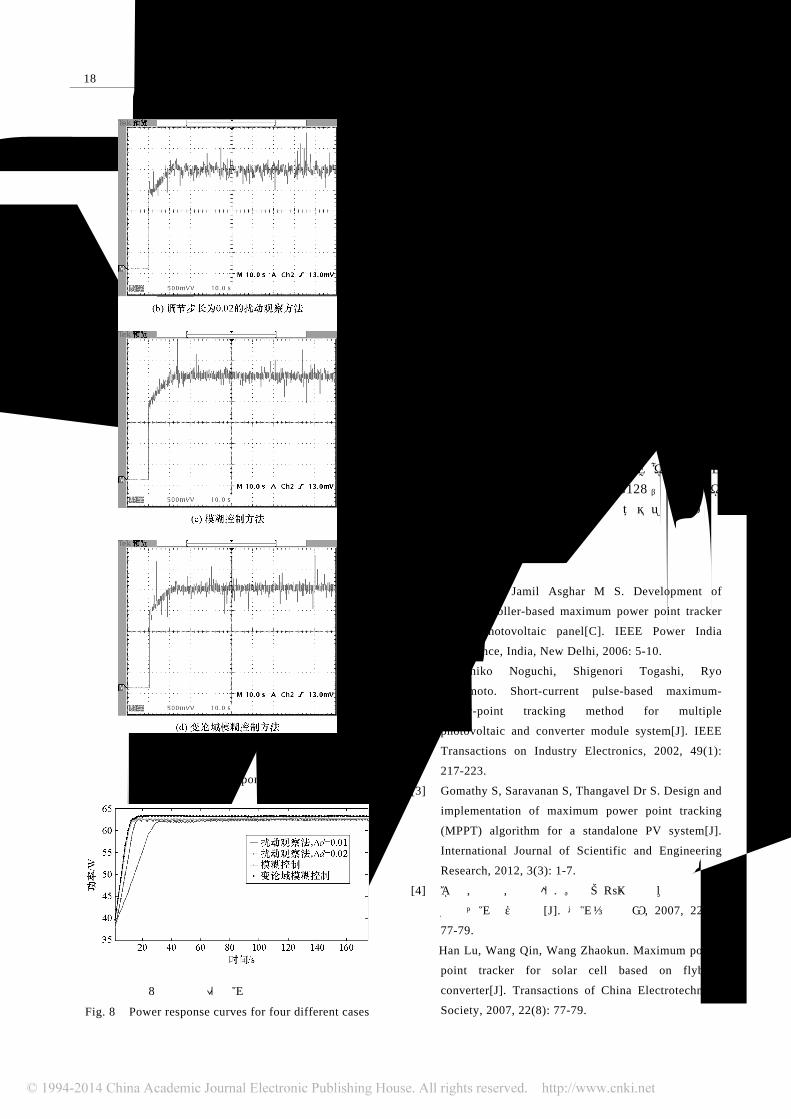
进行了对比电路实验。实验结果如图 7 所示,其中
图 7a为扰动观察方法(调节步长为 0.01)的功率响
应曲线;图 7b 为扰动观察方法(调节步长为 0.02)
的功率响应曲线;图 7c为基本模糊控制方法功率响
应曲线;图 7d为变论域模糊控制方法功率响应曲线。
图 7中所有示波器图的横坐标是时间,单位是 10ms/
格,纵坐标是功率 13W/格。将上位机记录的 4种实
验数据绘制对比结果曲线如图 8 所示,四种情况下
稳态输出平均功率分别为 62.506 9W,62.579 3 W,
62.741 2 W和 63.298 4 W。在实验 175s过程中总的
电功比较见表 3。对比实验结果可见,采用调整步
长(占空比变化)为 0.01时,扰动观察法稳态波动
小;而采用调整步长为 0.02时,动态过程变短,但
稳态波动较大。基本模糊控制可以在缩短调节时间
的基础上,提高稳态精度;而变论域模糊控制方法
响应速度最快,稳态精度最高,这些结论与理论分
析和仿真分析结果一致。
18 电 工 技 术 学 报 2013 年 8月
图 7 实验功率响应示波器图
Fig. 7 Power response curves
图 8 四种情况下功率响应曲线图
Fig. 8 Power response curves for four different cases
表 3 四种情况下的定量比较
Table 3 Quantitative experimental comparison
of four cases
方法 实验时间/s 电功/J
扰动观察法
(步长0.01) 175 10 513
扰动观察法
(步长0.02) 175 10 706
传统模糊控制 175 10 787
变论域模糊控制 175 10 889
5 结论
本文分析了扰动观察方法,基本模糊控制方法
和变论域模糊控制方法应用于光伏阵列最大功率跟
踪控制问题的特点,并搭建了仿真模型和实验电路,
进行了仿真和实验研究。对比研究结果表明采用变
论域模糊控制器进行光伏阵列最大功率点跟踪控制,
具有更快的响应速度,更高的跟踪精度和更大的功
率输出。该方法可在以 MC9S12DG128 单片机为核
心的控制系统中通过内嵌模糊指令方便地实现,展
示了良好的应用前景。
参考文献
[1] Abu Tariq, Jamil Asghar M S. Development of
microcontroller-based maximum power point tracker
for a photovoltaic panel[C]. IEEE Power India
Conference, India, New Delhi, 2006: 5-10.
[2] Toshihiko Noguchi, Shigenori Togashi, Ryo
Nakamoto. Short-current pulse-based maximum-
power-point tracking method for multiple
photovoltaic and converter module system[J]. IEEE
Transactions on Industry Electronics, 2002, 49(1):
217-223.
[3] Gomathy S, Saravanan S, Thangavel Dr S. Design and
implementation of maximum power point tracking
(MPPT) algorithm for a standalone PV system[J].
International Journal of Scientific and Engineering
Research, 2012, 3(3): 1-7.
[4] 韩璐 , 王勤 , 王兆坤 . 基于反激变换器的太阳能电
池最大功率跟踪器[J]. 电工技术学报, 2007, 22(8):
77-79.
Han Lu, Wang Qin, Wang Zhaokun. Maximum power
point tracker for solar cell based on flyback
converter[J]. Transactions of China Electrotechnical
Society, 2007, 22(8): 77-79.
第 28 卷第 8期 任海鹏等 光伏阵列最大功率跟踪变论域模糊控制 19
[5] Emad M, Ahmed, Masahito Shoyama. Variable step
size maximum power point tracker using a single
variable for stand-alone battery PV systems[J].
Journal of Power Electronics, 2011, 11(2): 218-227.
[6] 傅诚 , 陈鸣 , 沈玉樑 , 等 . 基于输出参数的光伏电
池最大功率点跟踪控制 [J] . 电工技术学报 , 2007,
22(2): 148-152.
Fu Cheng, Chen Ming, Shen Yuliang, et al. A control
method of maximum power point based on output
parameters[J]. Transactions of China Electrotechnical
Society, 2007, 22(2): 148-152.
[7] 崔岩, 蔡炳煌, 李大勇, 等. 太阳能光伏系统 MPPT
控制算法的对比研究 [J]. 太阳能学报 , 2006,
27(6):535-539.
Cui Yan, Cai Binghuang, Li Dayong, et al. Compar-
ative studies on the MPPT control algorithms of solar
energy photovoltaic system[J]. Acta Energiae Solaris
Sinica, 2006, 27(6): 535-539.
[8] Piegari L, Rizzo R. Adaptive perturb and observe
algorithm for photovoltaic maximum power point
tracking[J]. IET Renewable Power Generation, 2010,
4(4): 317-328.
[9] Scarpa V, Buso S, Spiazzi G. Low-complexity MPPT
technique exploiting the PV module MPP locus
characterization[J]. IEEE Transactions on Industrial
Electronics, 2009, 56(5): 1513-1538.
[10] D’Souza N S, Lopes L A, Liu X. Comparative study
of variable step size perturbation and observation
maximum power point trackers for PV systems[J].
Electric Power System Research, 2010, 80(3):
296-305.
[11] De Brito M A G, Galotto L, Sampaio LP, et al.
Evaluation of the main MPPT techniques for
photovoltaic applications[J]. IEEE Transactions on
Industrial Electronics, 2013, 60(3): 1156-1167.
[12] 吴理博 , 赵争鸣 , 刘建政 , 等 . 单级式光伏并网逆
变系统中的最大功率跟踪算法稳定性研究 [J].中国
电机工程学报, 2006, 26(6): 73-77.
Wu Libo, Zhao Zhenming, Liu Jianzheng, et al.
Research on the stability of MPPT strategy applied in
single-stage grid-connected photovoltaic system[J].
Proceedings of the CSEE, 2006, 26(6): 73-77.
[13] 任玲 , 宗灶童 . 扰动观察法实现太阳能电池最大功
率跟踪控制 [J], 工业仪表与自动化装置 , 2010(2):
42-44.
Ren Ling, Zong Zaotong. Maximum power point
tracking based on perturbing and observing algorithm
[J]. Industrial Instrumentation and Automation,
2010(2): 42-44.
[14] Ali A N A, Saied M H, Mostafa M Z, et al. A survey
of maximum PPT techniques of PV systems[C],
IEEE Energytech, USA, Cleveland, 2012: 1-17.
[15] D'Souza N S, Lopes L A C, Liu X. An intelligent
maximum power point tracker using peak current
control[C]. IEEE 36th Power Electronics Specialists
Conference, Brazil, Recife, 2005: 172-177.
[16] Larbes C, Cheikh S, Obeidi T, et al. Genetic
algorithms optimized fuzzy logic control for the
maximum power point tracking in photovoltaic
system[J]. Renewable Energy, 2009, 34(10):
2093-2100.
[17] Cristaldi L, Faifer M, Rossi M, et al. A simple
photovoltaic panel model: characterization procedure
and evaluation of the role of environmental
measurements[J]. IEEE Transactions on Instrumenta-
tion and Measurement, 2012, 61(10): 2632-2641.
[18] Gradella M, Rafael J, Ruppert E, Comprehensive
approach to modeling and simulation of photovoltaic
arrays[J], IEEE Transactions on Power Electronics,
2009, 24(5): 1198-1208.
[19] Oscar Lopez Lapena, Teresa Penella Maria, Manel
Gasulla. A new MPPT method for low-power solar
energy harvesting[J]. IEEE Transactions on Industrial
Electronics, 2010, 57(9): 3129-3138.
[20] 李洪兴 . 变论域自适应模糊控制器[J]. 中国科学 E
辑, 1999, 29(1): 32-42
Li Hongxing, Variable universe adaptive fuzzy
controller[J]. Science in China Series E, 1999, 29(1):
32-42.
[21] 潘湘飞 , 宋立忠 . 几种变论域模糊控制收缩因子有
效性研究[J]. 控制工程, 2008, 9(15): 106-108.
Pang Xiangfei, Song Lizong. Effectiveness of several
shrinkage factors of variable universe fuzzy control[J].
Control Engineering of China, 2008, 9(15): 106-108.
作者简介
任海鹏 男,1975 年生,博士,教授,博士生导师,从事高效电力
电子装置,复杂系统建模与控制研究。
郭 鑫 男,1986 年生,博士研究生,从事高效电力电子装置控
制方法研究。
Related Documents










