*26631326_1220* Engenharia dos acionamentos \ Automação dos acionamentos \ Integração no sistema \ Serviços Manual MOVIDRIVE ® modular/system/technology Placa de segurança MOVISAFE ® CS..A (versão 3) Edição 12/2020 26631326/PT-BR

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

*26631326_1220*Engenharia dos acionamentos \ Automação dos acionamentos \ Integração no sistema \ Serviços
Manual
MOVIDRIVE® modular/system/technologyPlaca de segurança MOVISAFE® CS..A (versão 3)
Edição 12/2020 26631326/PT-BR
SEW-EURODRIVE—Driving the world
Índice
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 3
Índice1 Informações gerais................................................................................................................... 9
1.1 Utilização da documentação........................................................................................... 91.2 Estrutura das advertências ............................................................................................. 9
1.2.1 Significado das palavras de aviso.................................................................. 91.2.2 Estrutura das advertências específicas a determinados capítulos ................ 91.2.3 Estrutura das advertências integradas......................................................... 10
1.3 Reivindicação de direitos de garantia ........................................................................... 101.4 Conteúdo da documentação......................................................................................... 101.5 Publicações válidas ...................................................................................................... 10
1.5.1 Atribuição da documentação à versão do firmware MOVISAFE® CS..A ..... 111.6 Sinal de separação decimal em valores numéricos...................................................... 111.7 Nota sobre os direitos autorais ..................................................................................... 111.8 Nomes dos produtos e marcas ..................................................................................... 11
1.8.1 Marcas da Beckhoff Automation GmbH....................................................... 11
2 Indicações de segurança....................................................................................................... 122.1 Observações preliminares ............................................................................................ 122.2 Deveres do operador .................................................................................................... 122.3 Grupo alvo .................................................................................................................... 122.4 Utilização prevista......................................................................................................... 132.5 Transporte..................................................................................................................... 142.6 Instalação / Montagem.................................................................................................. 14
2.6.1 Restrições ao uso ........................................................................................ 142.7 Instalação elétrica ......................................................................................................... 142.8 Terminologia ................................................................................................................. 152.9 Colocação em operação/operação ............................................................................... 15
3 Conceito de segurança .......................................................................................................... 163.1 Informação geral ........................................................................................................... 163.2 Informações sobre as categorias de parada................................................................. 163.3 Armazenamento de chaves inserível............................................................................ 173.4 Identificação e autenticação ......................................................................................... 173.5 Relatório e verificação técnica de segurança ............................................................... 183.6 Conceito de segurança MOVISAFE® CS..A ................................................................ 193.7 Funções do componente de segurança conforme EN 61800-5-2 ................................ 20
3.7.1 STO (Parada Segura Ativa) – Torque desligado de modo seguro .............. 203.7.2 SS1-t (Safe Stop 1) – Parada segura 1 com gerenciamento de tempo....... 213.7.3 SS1-r (Safe Stop 1) – Parada segura 1 com monitoração da rampa de
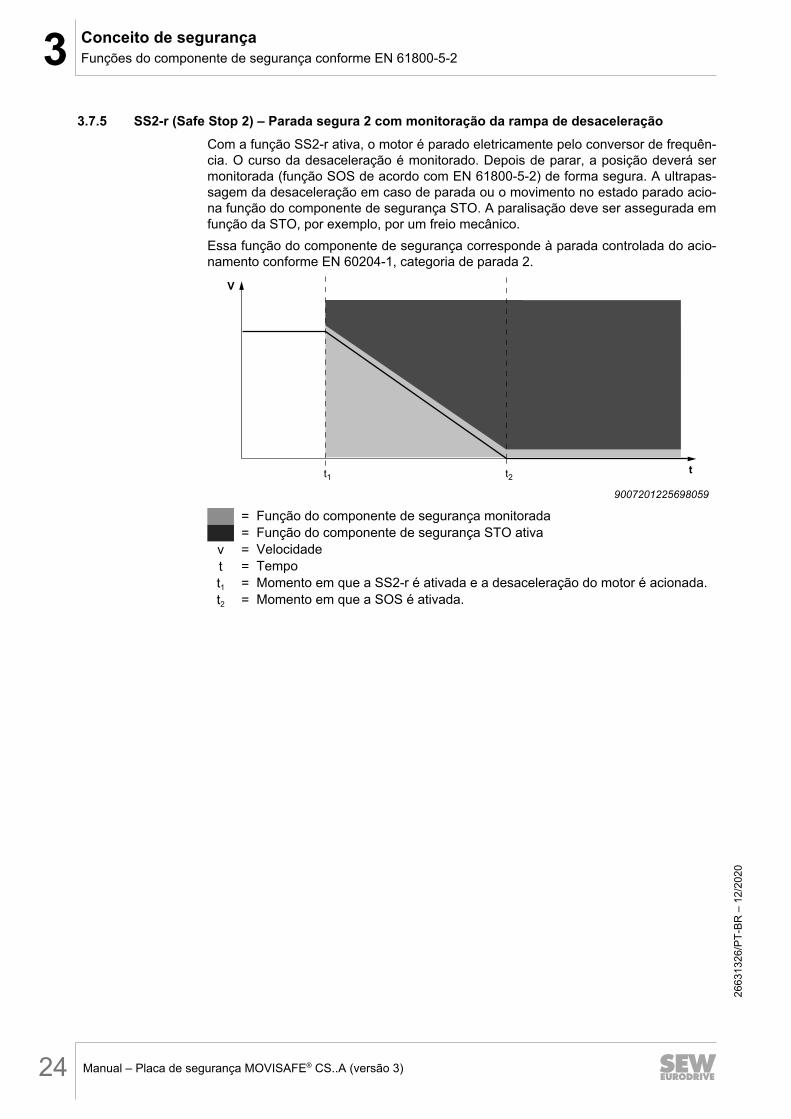
desaceleração.............................................................................................. 223.7.4 SS2-t (Safe Stop 2) – Parada segura 2 com gerenciamento de tempo....... 233.7.5 SS2-r (Safe Stop 2) – Parada segura 2 com monitoração da rampa de
desaceleração.............................................................................................. 243.7.6 SOS (Safe Operating Stop) – Parada operacional segura .......................... 253.7.7 SLA (Safely Limited Acceleration) – Aceleração seguramente limitada ...... 253.7.8 SLS (Safely Limited Speed) – Velocidade seguramente limitada................ 263.7.9 SSR (Safe Speed Range) – Faixa de velocidade segura ............................ 26
2663
1326
/PT-
BR –
12/
2020
Índice
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)4
3.7.10 SSM (Safe Speed Monitoring) – Monitoração de velocidade segura .......... 273.7.11 SDI (Safe Direction) – Direção de movimento segura ................................. 273.7.12 SLI (Safely Limited Increment) – Incremento limitado com segurança........ 283.7.13 SBC (Safe Brake Control) – Sistema de controle do freio seguro ............... 283.7.14 SLP (Safely Limited Position) – Posição seguramente limitada .................. 293.7.15 SCA (Safe Cam) – Came seguro................................................................. 29
3.8 Conceito de segurança Assist CS.. .............................................................................. 313.8.1 Parâmetros de segurança............................................................................ 313.8.2 Conceito e sequência de teste..................................................................... 31
4 Condições de tecnologia de segurança............................................................................... 324.1 Requisitos para a instalação......................................................................................... 324.2 Requisitos para o cabo do encoder .............................................................................. 32
4.2.1 Cabo do encoder SEN/COS ........................................................................ 324.2.2 Cabo do encoder HTL.................................................................................. 334.2.3 Cabo do encoder SSI................................................................................... 33
4.3 Requisitos para os sensores e atuadores externos...................................................... 344.4 Requisitos para a colocação em operação................................................................... 344.5 Requisitos quando da parada de emergência de acordo com a norma EN 60204-1
(parada de emergência)................................................................................................ 354.6 Requisitos dos encoders............................................................................................... 35
4.6.1 Requisitos gerais.......................................................................................... 354.6.2 Encoders de segurança permitidos da SEW‑EURODRIVE......................... 364.6.3 Irregularidade de quantização...................................................................... 374.6.4 Sentido de contagem ................................................................................... 394.6.5 Proteção contra ultrapassagem da rotação limite mecânica ....................... 394.6.6 Encoders permitidos para MOVISAFE® CSA31A ........................................ 404.6.7 Requisitos dos encoders SSI ....................................................................... 404.6.8 Requisitos ao encoder de código de barras................................................. 424.6.9 Requisitos ao encoder linear segura CDx75................................................ 424.6.10 Conceitos do encoder .................................................................................. 42
4.7 Requisitos à operação .................................................................................................. 474.8 Aprovação..................................................................................................................... 47
5 Estrutura da unidade.............................................................................................................. 485.1 Denominação do tipo .................................................................................................... 485.2 Plaqueta de identificação.............................................................................................. 495.3 Escopo de fornecimento ............................................................................................... 50
5.3.1 Escopo de fornecimento opcional ................................................................ 505.4 Compatibilidade ............................................................................................................ 51
5.4.1 Versão do firmware MOVISAFE® CS..A e estado da unidade MOVIDRIVE® .... 51
5.4.2 Versão do firmware MOVISAFE® CS..A e versão MOVISUITE® ................. 545.5 MOVISAFE® CSS21A/CSB21A ................................................................................... 555.6 MOVISAFE® CSB31A/CSS31A ................................................................................... 565.7 MOVISAFE® CSA31A .................................................................................................. 57
6 Instalação mecânica............................................................................................................... 58
2663
1326
/PT-
BR –
12/
2020
Índice
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 5
6.1 Antes de começar ......................................................................................................... 586.2 Montagem da placa de segurança MOVISAFE® CS..A ............................................... 58
6.2.1 Conversor de aplicação permitido................................................................ 586.2.2 Montagem no MOVIDRIVE® modular........................................................... 586.2.3 Montagem no MOVIDRIVE® system/technology.......................................... 60
7 Instalação elétrica .................................................................................................................. 647.1 Informação importante .................................................................................................. 647.2 Instruções de instalação ............................................................................................... 647.3 Códigos......................................................................................................................... 647.4 Programação dos bornes.............................................................................................. 657.5 Desligamento seguro .................................................................................................... 667.6 Entradas digitais seguras (F-DI.) .................................................................................. 66
7.6.1 Monitoramento de discrepância ................................................................... 677.6.2 Bloqueio ....................................................................................................... 697.6.3 Monitoramento de sinais .............................................................................. 697.6.4 Pulsação e monitoração de erro cruzado .................................................... 707.6.5 Sensores de contato (1 canal) ..................................................................... 717.6.6 Sensores de contato (2 canal) ..................................................................... 727.6.7 Sensores ativos (2 canal)............................................................................. 747.6.8 Sensores com saídas para semicondutores (OSSD, 2 canais) ................... 76
7.7 Saídas digitais seguras (F-DO.).................................................................................... 777.7.1 Informação geral .......................................................................................... 777.7.2 Cargas capacitivas....................................................................................... 787.7.3 Cargas indutivas .......................................................................................... 797.7.4 Cargas ôhmicas ........................................................................................... 797.7.5 Informações sobre diagnósticos de cabos e pulsos de teste....................... 797.7.6 Saída digital interna segura F-DO_STO ...................................................... 807.7.7 Atuador (2 canais, comutação PM).............................................................. 817.7.8 Atuador (2 canais, comutação PP) .............................................................. 827.7.9 Atuador (1 canal, comutação P)................................................................... 83
7.8 Encoder integrado EI7C FS.......................................................................................... 847.8.1 Características ............................................................................................. 847.8.2 Instalação..................................................................................................... 85
8 Colocação em operação ........................................................................................................ 868.1 Informação importante .................................................................................................. 868.2 Informação geral sobre a colocação em operação....................................................... 868.3 Versões da colocação em operação............................................................................. 87
8.3.1 Pré-requisitos ............................................................................................... 878.3.2 Procedimento de parametrização ................................................................ 878.3.3 Variante 1: Operação autônoma (sem conexão a comunicação segura) .... 888.3.4 Variante 2: Com conexão ao PROFIsafe..................................................... 89
8.4 Ajuste da máxima duração do teste em carga com capacitância desconhecida.......... 898.5 Colocação em operação dos sistemas do encoder ...................................................... 90
8.5.1 Avaliação do encoder da placa de segurança CSA31A .............................. 90
2663
1326
/PT-
BR –
12/
2020

Índice
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)6
8.5.2 Procedimento para determinar a posição com a placa de segurança CSA31A 93
8.6 Parametrização das funções do componente de segurança........................................ 968.6.1 Pré-requisitos ............................................................................................... 968.6.2 Função do componente de segurança STO com MOVISAFE® CS..A......... 978.6.3 Função do componente de segurança SS1-t com MOVISAFE® CS..A ....... 978.6.4 Função do componente de segurança SS1-r com MOVISAFE® CS..A ....... 988.6.5 Função do componente de segurança SS2-t com MOVISAFE® CS..A ..... 1008.6.6 Função do componente de segurança SS2-r com MOVISAFE® CS..A ..... 1018.6.7 Função do componente de segurança STO com MOVISAFE® CS..A....... 1028.6.8 Função do componente de segurança SLA com MOVISAFE® CS..A ....... 1038.6.9 Função do componente de segurança SLS com MOVISAFE® CS..A ....... 1048.6.10 Função do componente de segurança SSR com MOVISAFE® CS..A....... 1058.6.11 Função do componente de segurança SSM com MOVISAFE® CS..A ...... 1068.6.12 Função do componente de segurança SDI com MOVISAFE® CS..A ........ 1078.6.13 Função do componente de segurança SLI com MOVISAFE® CS..A......... 1088.6.14 Modo silencioso Irregularidade do encoder ............................................... 1098.6.15 Modo silencioso dos dados de saída do processo seguro (modo silencioso F-
PA) ............................................................................................................. 1108.6.16 Modo de teste ............................................................................................ 1108.6.17 Função do componente de segurança SCA com MOVISAFE® CSA31A .. 1118.6.18 Função do componente de segurança SLP com MOVISAFE® CSA31A ... 1128.6.19 Referenciamento seguro............................................................................ 1138.6.20 Função "Ajuste de escorregamento".......................................................... 1158.6.21 Teste de frenagem SBT ............................................................................. 117
8.7 Colocação em operação da placa de segurança no protocolo F................................ 1178.7.1 Requisitos para comunicação F................................................................. 1178.7.2 Protocolo PROFIsafe ................................................................................. 1188.7.3 Protocolo FSoE .......................................................................................... 1198.7.4 Protocolo ISOFAST® .................................................................................. 120
8.8 Estados operacionais.................................................................................................. 1218.8.1 Estado operacional Operação.................................................................... 1218.8.2 Estado operacional Parametrização .......................................................... 1218.8.3 Estado operacional Estado seguro após uma irregularidade crítica.......... 121
8.9 Aceitação relacionada com a tecnologia de segurança.............................................. 1218.9.1 Procedimento ............................................................................................. 1228.9.2 Elaborar relatório de aceitação .................................................................. 1238.9.3 Estrutura do relatório de aceitação ............................................................ 1238.9.4 Publicar aceitação...................................................................................... 124
8.10 Estabelecimento do estado de fornecimento.............................................................. 1248.10.1 Pré-requisitos ............................................................................................. 1248.10.2 Procedimento ............................................................................................. 125
8.11 Redefinir senha........................................................................................................... 1258.11.1 Procedimento ............................................................................................. 125
9 Operação ............................................................................................................................... 1269.1 Perigo da operação do acionamento por inércia ........................................................ 126
2663
1326
/PT-
BR –
12/
2020
Índice
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 7
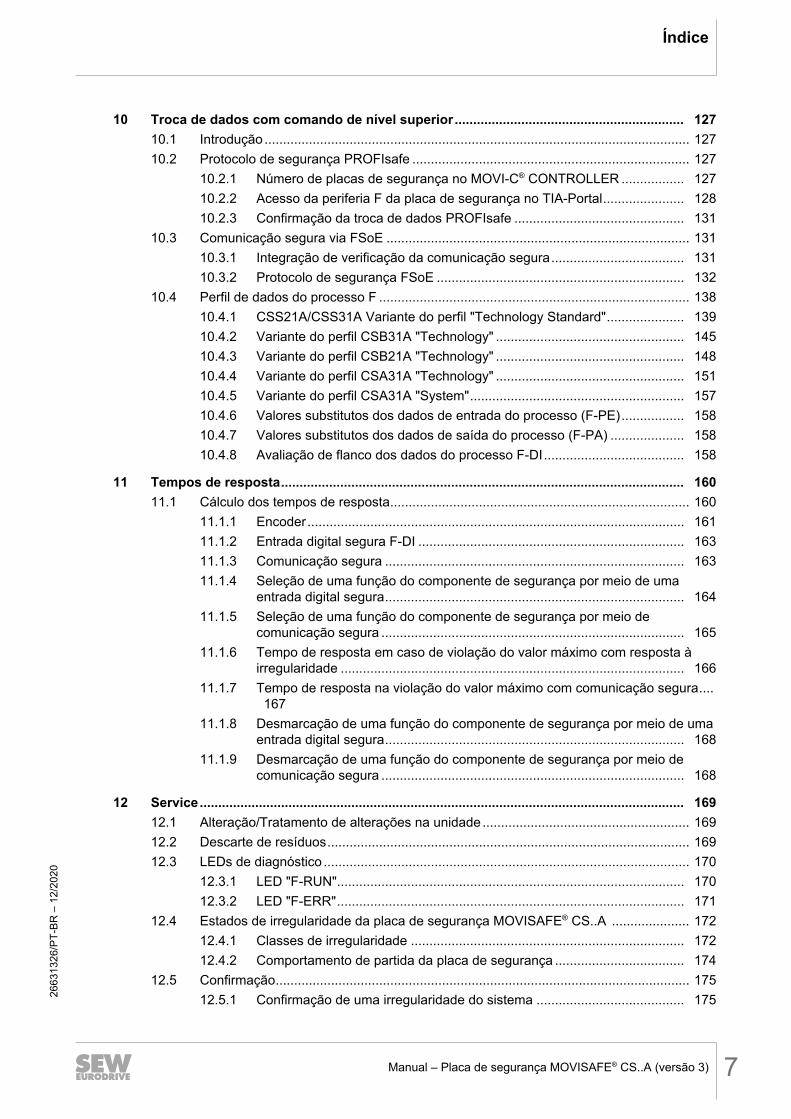
10 Troca de dados com comando de nível superior .............................................................. 12710.1 Introdução ................................................................................................................... 12710.2 Protocolo de segurança PROFIsafe ........................................................................... 127
10.2.1 Número de placas de segurança no MOVI-C® CONTROLLER ................. 12710.2.2 Acesso da periferia F da placa de segurança no TIA-Portal...................... 12810.2.3 Confirmação da troca de dados PROFIsafe .............................................. 131
10.3 Comunicação segura via FSoE .................................................................................. 13110.3.1 Integração de verificação da comunicação segura.................................... 13110.3.2 Protocolo de segurança FSoE ................................................................... 132
10.4 Perfil de dados do processo F .................................................................................... 13810.4.1 CSS21A/CSS31A Variante do perfil "Technology Standard"..................... 13910.4.2 Variante do perfil CSB31A "Technology" ................................................... 14510.4.3 Variante do perfil CSB21A "Technology" ................................................... 14810.4.4 Variante do perfil CSA31A "Technology" ................................................... 15110.4.5 Variante do perfil CSA31A "System".......................................................... 15710.4.6 Valores substitutos dos dados de entrada do processo (F-PE)................. 15810.4.7 Valores substitutos dos dados de saída do processo (F-PA) .................... 15810.4.8 Avaliação de flanco dos dados do processo F-DI...................................... 158
11 Tempos de resposta............................................................................................................. 16011.1 Cálculo dos tempos de resposta................................................................................. 160
11.1.1 Encoder...................................................................................................... 16111.1.2 Entrada digital segura F-DI ........................................................................ 16311.1.3 Comunicação segura ................................................................................. 16311.1.4 Seleção de uma função do componente de segurança por meio de uma
entrada digital segura................................................................................. 16411.1.5 Seleção de uma função do componente de segurança por meio de
comunicação segura .................................................................................. 16511.1.6 Tempo de resposta em caso de violação do valor máximo com resposta à
irregularidade ............................................................................................. 16611.1.7 Tempo de resposta na violação do valor máximo com comunicação segura....
16711.1.8 Desmarcação de uma função do componente de segurança por meio de uma
entrada digital segura................................................................................. 16811.1.9 Desmarcação de uma função do componente de segurança por meio de
comunicação segura .................................................................................. 168
12 Service................................................................................................................................... 16912.1 Alteração/Tratamento de alterações na unidade........................................................ 16912.2 Descarte de resíduos.................................................................................................. 16912.3 LEDs de diagnóstico ................................................................................................... 170
12.3.1 LED "F-RUN".............................................................................................. 17012.3.2 LED "F-ERR".............................................................................................. 171
12.4 Estados de irregularidade da placa de segurança MOVISAFE® CS..A ..................... 17212.4.1 Classes de irregularidade .......................................................................... 17212.4.2 Comportamento de partida da placa de segurança ................................... 174
12.5 Confirmação................................................................................................................ 17512.5.1 Confirmação de uma irregularidade do sistema ........................................ 17526
6313
26/P
T-BR
– 1
2/20
20
Índice
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)8
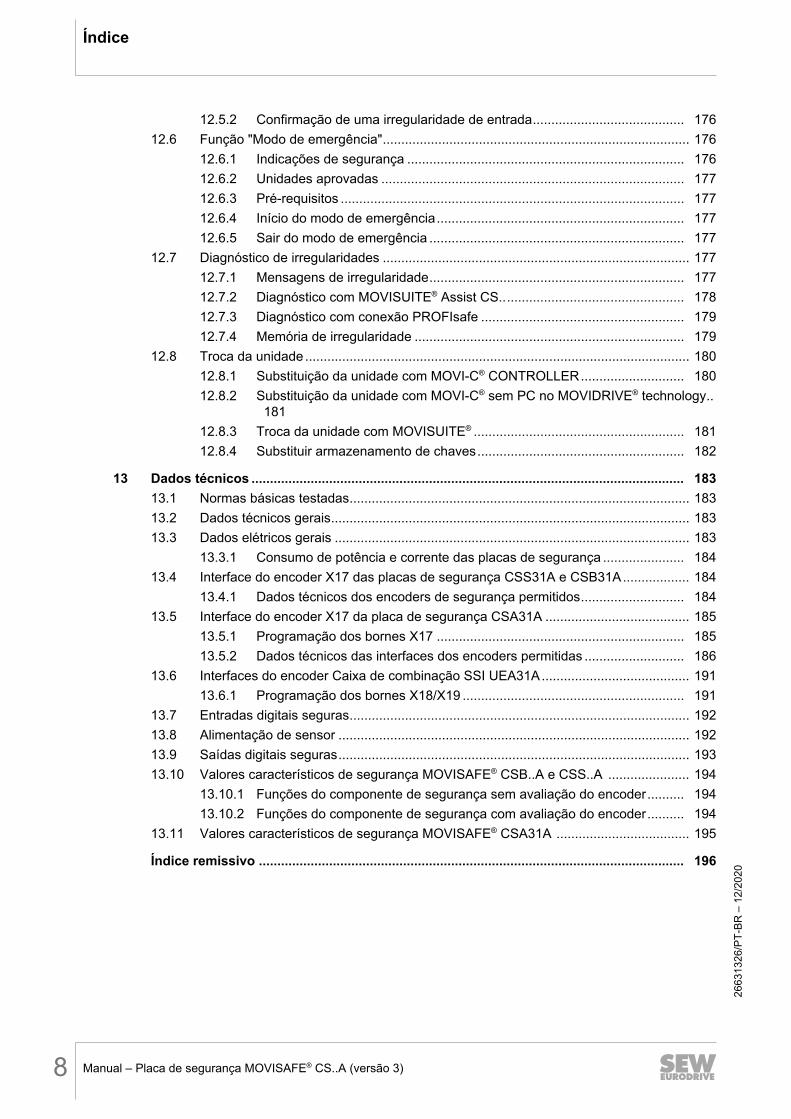
12.5.2 Confirmação de uma irregularidade de entrada......................................... 17612.6 Função "Modo de emergência"................................................................................... 176
12.6.1 Indicações de segurança ........................................................................... 17612.6.2 Unidades aprovadas .................................................................................. 17712.6.3 Pré-requisitos ............................................................................................. 17712.6.4 Início do modo de emergência................................................................... 17712.6.5 Sair do modo de emergência ..................................................................... 177
12.7 Diagnóstico de irregularidades ................................................................................... 17712.7.1 Mensagens de irregularidade..................................................................... 17712.7.2 Diagnóstico com MOVISUITE® Assist CS.................................................. 17812.7.3 Diagnóstico com conexão PROFIsafe ....................................................... 17912.7.4 Memória de irregularidade ......................................................................... 179
12.8 Troca da unidade ........................................................................................................ 18012.8.1 Substituição da unidade com MOVI-C® CONTROLLER............................ 18012.8.2 Substituição da unidade com MOVI-C® sem PC no MOVIDRIVE® technology..
18112.8.3 Troca da unidade com MOVISUITE® ......................................................... 18112.8.4 Substituir armazenamento de chaves........................................................ 182
13 Dados técnicos ..................................................................................................................... 18313.1 Normas básicas testadas............................................................................................ 18313.2 Dados técnicos gerais................................................................................................. 18313.3 Dados elétricos gerais ................................................................................................ 183
13.3.1 Consumo de potência e corrente das placas de segurança ...................... 18413.4 Interface do encoder X17 das placas de segurança CSS31A e CSB31A.................. 184
13.4.1 Dados técnicos dos encoders de segurança permitidos............................ 18413.5 Interface do encoder X17 da placa de segurança CSA31A ....................................... 185
13.5.1 Programação dos bornes X17 ................................................................... 18513.5.2 Dados técnicos das interfaces dos encoders permitidas ........................... 186
13.6 Interfaces do encoder Caixa de combinação SSI UEA31A........................................ 19113.6.1 Programação dos bornes X18/X19 ............................................................ 191
13.7 Entradas digitais seguras............................................................................................ 19213.8 Alimentação de sensor ............................................................................................... 19213.9 Saídas digitais seguras............................................................................................... 19313.10 Valores característicos de segurança MOVISAFE® CSB..A e CSS..A ...................... 194
13.10.1 Funções do componente de segurança sem avaliação do encoder.......... 19413.10.2 Funções do componente de segurança com avaliação do encoder.......... 194
13.11 Valores característicos de segurança MOVISAFE® CSA31A .................................... 195
Índice remissivo ................................................................................................................... 196
2663
1326
/PT-
BR –
12/
2020

1Informações geraisUtilização da documentação
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 9
1 Informações gerais1.1 Utilização da documentação
A documentação atual refere-se às instruções de operação originais.Essa documentação é parte integrante do produto. A documentação destina-se a to-das as pessoas que executam trabalhos no produto.Coloque a documentação à disposição em condição legível. Certificar-se de que osresponsáveis pelo sistema e pela operação, bem como pessoas que trabalham sobresponsabilidade própria na unidade, tenham lido e compreendido inteiramente a do-cumentação. Em caso de dúvidas ou se desejar outras informações, consultar aSEW‑EURODRIVE.
1.2 Estrutura das advertências1.2.1 Significado das palavras de aviso
A seguinte tabela mostra a graduação e o significado das palavras de aviso das ad-vertências.
Palavra de aviso Significado Consequências em caso de nãoobservação
PERIGO Perigo iminente Morte ou ferimentos graves
AVISO Possível situação de risco Morte ou ferimentos graves
CUIDADO Possível situação de risco Ferimentos ligeiros
ATENÇÃO Possíveis danos materiais Danos no produto ou no seu ambi-ente
INFORMAÇÃO Informação útil ou dica: facilita o ma-nuseio do produto.
1.2.2 Estrutura das advertências específicas a determinados capítulosAs advertências específicas se aplicam não somente a uma determinada ação, mastambém a várias ações dentro de um assunto específico. Os símbolos de perigo usa-dos advertem sobre um perigo geral ou específico.Exemplo da estrutura formal de uma advertência específica a determinados capítulos:
PALAVRA DE AVISO!Tipo de perigo e sua fonte.Possíveis consequências em caso de não observação.• Medida(s) para prevenir perigos.
2663
1326
/PT-
BR –
12/
2020

1 Informações geraisReivindicação de direitos de garantia
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)10
Significado dos símbolos de perigoOs símbolos de perigo que se encontram nas advertências têm o seguinte significado:
Símbolo de perigo SignificadoPonto de perigo geral
Aviso de partida automática
1.2.3 Estrutura das advertências integradasAs advertências integradas estão diretamente integradas na ação antes do passo querepresenta um eventual perigo.Exemplo da estrutura formal de uma advertência integrada:
PALAVRA DE AVISO! Tipo de perigo e sua fonte. Possíveis consequências emcaso de não observação. Medida(s) para prevenir perigos.
1.3 Reivindicação de direitos de garantiaÉ fundamental observar as instruções de segurança contidas nesta documentação.Isso é um pré-requisito para o funcionamento perfeito da unidade e para realizaçãode reivindicações de direitos de garantia. Leia a documentação primeiro antes de tra-balhar com o produto!
1.4 Conteúdo da documentaçãoEsta documentação contém adendos e estipulações de tecnologia de segurança paraa utilização em aplicações relacionadas à segurança.
1.5 Publicações válidasEsta documentação complementa as instruções de operação e limita as indicaçõesde utilização de acordo com os dados a seguir. Esta documentação apenas pode serusada em conjunto com as instruções de operação.• Instruções de operação "MOVIDRIVE® modular", "MOVIDRIVE® system" e
"MOVIDRIVE® technology"• Instruções de operação "Conversor de aplicação MOVIDRIVE® modular/system
com perfil da unidade CiA402"• Adendo às Instruções de operação "Encoders e freios de segurança – Motores
CA DR.., DRN.., DR2.., ERD.., EDRN.. Funcionamento seguro"• Adendo às instruções de operação "Encoders de segurança AK0H, AK1H – Ser-
vomotores síncronos CMP40 - 150, CMPZ71 – 100 Funcionamento seguro".• Manual "MOVIDRIVE® modular/system/technology - Função de diagnóstico Teste
de frenagem com MOVISAFE® CS..A"
2663
1326
/PT-
BR –
12/
2020

1Informações geraisSinal de separação decimal em valores numéricos
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 11
Utilizar sempre a edição atual das documentações e a versão atual do software.No site da SEW‑EURODRIVE (www.sew-eurodrive.com) encontra-se disponível umagrande seleção de documentação em vários idiomas para download. Em caso de ne-cessidade, as documentações também podem ser encomendadas àSEW‑EURODRIVE em formato impresso.
1.5.1 Atribuição da documentação à versão do firmware MOVISAFE® CS..A• O manual "MOVIDRIVE® modular/system/technology – Placa de segurança
MOVISAFE® CS..A (versão 3)" é válido para a placa de segurançaMOVISAFE® CS..A a partir da versão de firmware 2.05 e substitui o manual"MOVIDRIVE® modular/system/technology – Placa de segurançaMOVISAFE® CS..A (versão 2)".
• O manual "MOVIDRIVE® modular/system – Placa de segurançaMOVISAFE® CS..A (versão 1)" é válido para a placa de segurançaMOVISAFE® CS..A a partir da versão de firmware 1.05.
1.6 Sinal de separação decimal em valores numéricos
Esta documentação utiliza o ponto como sinal de separação decimal.Exemplo: 30.5 kg
1.7 Nota sobre os direitos autorais
© 2020 SEW‑EURODRIVE. Todos os direitos reservados. É proibida qualquer repro-dução, adaptação, divulgação ou outro tipo de reutilização total ou parcial.
1.8 Nomes dos produtos e marcas
Os nomes dos produtos citados nesta documentação são marcas ou marcas registra-das dos respectivos proprietários.
1.8.1 Marcas da Beckhoff Automation GmbHEtherCAT® e Safety over EtherCAT® são marcas registradas e tecnologias patentea-das, licenciadas pela Beckhoff Automation GmbH, Alemanha.
25798632331
2663
1326
/PT-
BR –
12/
2020
2 Indicações de segurançaObservações preliminares
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)12
2 Indicações de segurança2.1 Observações preliminares
As indicações básicas de segurança a seguir têm como objetivo prevenir lesões e da-nos materiais e referem-se principalmente ao uso dos produtos aqui documentados.Se você usar componentes adicionais, observe também os avisos e indicações de se-gurança.
2.2 Deveres do operadorO operador deve certificar-se de que as indicações de segurança básicas sejam ob-servadas e cumpridas. Certificar-se de que os responsáveis pelo sistema e pela ope-ração, bem como pessoas que trabalham sob responsabilidade própria no produto, le-ram e compreenderam a documentação inteiramente.O operador deve certificar-se de que todos os trabalhos apresentados sejam realiza-dos somente por pessoal qualificado:• Instalação e montagem• Instalação e conexão• Colocação em operação• Manutenção e conservação• Colocação fora de operação• DesmontagemCertifique-se de que as pessoas que trabalham com o produto observem os seguintesregulamentos, determinações, documentos e indicações:• Regulamentos nacionais e regionais para segurança e prevenção de acidentes• Etiquetas de aviso e de segurança na unidade• Todos os documentos, instruções para instalação e colocação em operação e es-
quemas de ligação adicionais relativos ao projeto• Não montar, instalar nem colocar unidades danificadas em operação• Todos os requisitos e determinações específicos das instalaçõesCertifique-se de que o local onde a unidade estiver instalada seja equipado com dis-positivos adicionais de monitoração e proteção. Observe as normas de segurançaaplicáveis, assim como as leis que regulamentam equipamentos técnicos e normasde prevenção de acidentes.
2.3 Grupo alvo
Especialistas emtrabalho mecânico
Todos os trabalhos mecânicos só podem ser realizados exclusivamente por pessoaltécnico qualificado com treinamento adequado. Pessoal qualificado no contexto destadocumentação são pessoas que têm experiência com a montagem, instalação mecâ-nica, eliminação de irregularidades e manutenção do produto e que possuem as se-guintes qualificações:• Qualificação em mecânica de acordo com as regulamentações nacionais aplicá-
veis• Conhecimento dessa documentação
2663
1326
/PT-
BR –
12/
2020

2Indicações de segurançaUtilização prevista
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 13
Especialistas emtrabalho eletrotéc-nico
Todos os trabalhos eletrotécnicos só podem ser realizados exclusivamente por pes-soal técnico qualificado com treinamento adequado. Pessoal técnico qualificado nocontexto desta documentação são pessoas que têm experiência com a instalaçãoelétrica, colocação em operação, eliminação de irregularidades e manutenção do pro-duto e que possuem as seguintes qualificações:• Qualificação em eletrotécnica de acordo com as regulamentações nacionais apli-
cáveis• Conhecimento dessa documentação
Qualificação adici-onal
O pessoal também deve estar familiarizado com normas de segurança aplicáveis edisposições legais em vigor, bem como as normas, diretrizes e leis referidas nesta do-cumentação.A equipe deve ter recebido a autorização expressa da empresa para colocar em ope-ração, programar, parametrizar, identificar e aterrar unidades, sistemas e circuitos decorrente de acordo com os padrões da tecnologia de segurança.
Pessoal habilitado Todos os todos os trabalhos relacionados ao transporte, armazenamento, operação edescarte de resíduos só podem ser exclusivamente realizados por pessoas devida-mente treinadas. Esses treinamentos devem capacitar as pessoas a desempenharemas atividades e medidas necessárias de forma segura e de acordo com as especifica-ções.
2.4 Utilização prevista
O produto destina-se à instalação em conversores.O produto é um controlador de segurança programável para a fabricação de desliga-mentos e funções de segurança. O produto foi concebido para ser utilizado:• em instalações de parada de emergência• como componente de segurança na acepção da Diretiva de Máquinas 2006/42/CE• como PES para redução de risco na acepção da norma EN 61508• em circuitos de segurança de acordo com EN 60204-1• como PES para funcionamento seguro na acepção da norma EN 62061• como SRP/CS na acepção da norma EN ISO 13849• como unidade para a fabricação de funções de segurança conforme a norma
EN 61800-5-2Na ocasião da instalação em sistemas elétricos ou máquinas, o início da operaçãoconforme as especificações do produto fica proibido até que se confirme que a máqui-na está de acordo com as leis e regulamentos locais.As normas mencionadas na declaração de conformidade serão aplicadas à unidade.Se você usar o produto de forma imprópria ou diferente daquela prevista, há perigode ferimentos graves ou danos.Os dados técnicos assim como as informações sobre as condições de conexão po-dem ser encontrados na plaqueta de identificação e no capítulo "Dados técnicos" dadocumentação. É fundamental cumprir os dados e condições.
2663
1326
/PT-
BR –
12/
2020
2 Indicações de segurançaTransporte
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)14
2.5 Transporte
No ato do recebimento, inspecionar a carga para averiguar se há danos causados pe-lo transporte. Informar danos causados pelo transporte imediatamente à empresatransportadora. Se o produto estiver danificado, nenhum tipo de montagem, instala-ção ou colocação em operação pode ser realizado.Observar as seguintes informações ao realizar o transporte:• Certifique-se que o produto não está sujeito a impactos mecânicos.Se necessário, usar equipamento de transporte apropriado e devidamente dimensio-nado.Observar as informações sobre as condições climáticas especificadas no capítulo"Dados técnicos" (→ 2 183) da documentação.
2.6 Instalação / MontagemObserve que a montagem e refrigeração do produto sejam realizadas de acordo comos regulamentos da documentação.Proteja o produto contra alto esforço mecânico. O produto e seus componentes nãopodem se estender sobre calçadas e estradas. Sobretudo no transporte e manuseio,não entortar nenhuma das parcelas nem alterar as distâncias de isolamento. Compo-nentes elétricos não podem ser danificados mecanicamente nem inutilizados.Seguir as informações no capítulo "Instalação mecânica" (→ 2 58) na documenta-ção.
2.6.1 Restrições ao usoAs seguintes utilizações são proibidas, exceto se explicitamente autorizadas:• Uso em áreas potencialmente explosivas• Operação em ambientes expostos a óleos, ácidos, gases, vapores, poeiras e radi-
ações danosos• Uso sujeito a níveis excessivos de oscilações e impacto mecânicos, que extrapo-
lam os limites da norma EN 61800-5-1• Uso a partir de 3.800 m acima do nível médio do mar
2.7 Instalação elétrica
Após a instalação elétrica, certificar-se de que todas a coberturas necessárias este-jam corretamente colocadas.As medidas de prevenção e os dispositivos de proteção devem estar de acordo com aregulamentação aplicável (por exemplo: EN 60204-1 ou EN 61800-5-1).
2663
1326
/PT-
BR –
12/
2020
2Indicações de segurançaTerminologia
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 15
2.8 Terminologia• A denominação "F‑DI." indica uma entrada digital segura.• A denominação "F‑DO." indica uma saída digital segura.• A denominação "CS..A" é utilizada como termo genérico para todas as variantes
da linha de produtos MOVISAFE® CS. Se for feita uma referência no manual auma determinada variante de design, será utilizada a denominação completa.
• O termo "seguro" utilizado a seguir refere-se à classificação como uma função se-gura baseada na EN ISO 13849‑1.
• A ferramenta de parametrização "Assist CS.." é a interface de parametrização noMOVISUITE® para a placa de segurança MOVISAFE® CS..A.
• As funções do componente de segurança SS1 e SS2 são descritas a seguir, deacordo com a EN 61800‑5‑2 atualmente válida:– SS1-r corresponde à anterior representação de SS1(b)– SS1-t corresponde à anterior representação de SS1(c)– SS2-r corresponde à anterior representação de SS2(b)– SS2-t corresponde à anterior representação de SS2(c)
2.9 Colocação em operação/operação
Observar as advertências nos capítulos "Colocação em operação" (→ 2 86) e "Ope-ração" (→ 2 126) na documentação.Durante a operação, é possível que, dependendo do seu grau de proteção, as unida-des conectadas tenham peças que estejam sob tensão, desencapadas, igualmenteem movimento ou rotativas bem como peças que possuam superfícies quentes.As funções internas de segurança do produto ou o bloqueio mecânico podem levar àparada do motor. A eliminação da causa da irregularidade ou o reset podem provocara partida automática da unidade. Se isso não for permitido em máquinas ativadas pormotivos de segurança, a unidade deverá ser desligada da rede elétrica antes da elimi-nação da causa da irregularidade.O fato dos LEDs de operação e outros elementos de indicação estarem apagadosnão significa que a unidade esteja desligada da rede elétrica e desenergizada.Quando houver alterações em relação à operação normal desligue a unidade. Possí-veis alterações seriam, por exemplo, aumento da temperatura, ruídos ou oscilações.Buscar a causa. Se possível, consultar a SEW‑EURODRIVE.Não desative os dispositivos de proteção e monitoramento do sistema ou da máquina,nem mesmo durante a operação de teste.Nas aplicações sujeitas a um maior potencial de perigo podem ser necessárias medi-das de prevenção suplementares. Após cada modificação, é necessário verificar a efi-cácia dos dispositivos de proteção.
2663
1326
/PT-
BR –
12/
2020
3 Conceito de segurançaInformação geral
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)16
3 Conceito de segurança3.1 Informação geral
O placa de segurança MOVISAFE® CS..A é um módulo seguro com entradas e saí-das digitais seguras e, dependendo da parametrização, uma comunicação segura.O MOVISAFE® CS..A está totalmente integrado nos conversores MOVIDRIVE® modu-lar/system/technology. Isso significa que o MOVISAFE® CS..A ativa a função do com-ponente de segurança STO do conversor no interior da unidade. Em vez da isolaçãogalvânica do acionamento da rede através de contatores ou chaves, a comutaçãoSTO no interior da unidade impede de forma segura o controle dos semicondutoresde potência do estágio de saída. Com isso, a geração de campo magnético para orespectivo motor é desligada, apesar da tensão de entrada continuar presente.O conceito de segurança é definido pela existência de um estado seguro para todosos valores do processo seguros. O estado seguro da placa de segurançaMOVISAFE® CS..A é definido da seguinte maneira:• A saída digital segura interna F-DO_STO é desligada. Desta forma, a função do
componente de segurança STO é ativada.• Todas as outras saídas digitais seguras existentes são desligadas.• No caso de uma comunicação segura parametrizada, os valores substitutos (isto
é, todos os dados são "0") são enviados para os dados ou a comunicação é can-celada.
3.2 Informações sobre as categorias de parada• A função do componente de segurança STO corresponde à categoria de para-
da 0.• As funções do componente de segurança SS1-t e SS1-r correspondem à catego-
ria de parada 1.• As funções do componente de segurança SS2-t e SS2-r correspondem à catego-
ria de parada 2.
2663
1326
/PT-
BR –
12/
2020
3Conceito de segurançaArmazenamento de chaves inserível
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 17
3.3 Armazenamento de chaves inserívelO armazenamento de chaves deve estar conectado ao ligar a placa de segurançaMOVISAFE® CS..A e não deve ser desconectado quando a placa de segurança esti-ver ligada.Os dados de parametrização da placa de segurança MOVISAFE® CS..A são divididosem dados aplicativos e conjunto de dados da chave. O conjunto de dados da chavegarante a integridade dos dados.Os dados aplicativos são armazenados na unidade. Com a ajuda do conjunto de da-dos da chave no armazenamento de chaves inserível, os dados aplicativos são libera-dos. Somente se o conjunto de dados da chave no armazenamento de chaves inserí-vel se ajustar à parametrização, a placa de segurança mudará para operação.O armazenamento de chaves inserível também é usado para o estabelecimento dareferência de localização no sistema. Já que o conjunto de dados aplicativos só é li-berado com o conjunto de dados da chave correspondente do armazenamento dechaves inserível, a referência de localização poderá ser estabelecida. É de responsa-bilidade do usuário garantir a referência de localização o armazenamento de chavesinserível no sistema. Os dados de comunicação e referenciamento seguros tambémsão armazenados no armazenamento de chaves inserível, pois esses dados possu-em a mesma referência de localização. Desta forma, ao substituir uma unidade, ga-rante-se que os dados aplicativos e os dados de comunicação estejam disponíveisnovamente de forma imediata.Se ocorrer uma irregularidade no sistema ao salvar os dados de referência, substituiro armazenamento de chaves.
AVISODepois de desligar e religar a placa de segurança, a irregularidade não será maisrelatada.Morte ou ferimentos graves.• Certificar-se de que a referência de posição entre a placa de segurança e a apli-
cação esteja correta.
3.4 Identificação e autenticaçãoNa ferramenta de parametrização "Assist CS..", as etapas "Parametrizar", "Criar rela-tório" e "Confirmar aceitação" exigem a identificação clara da unidade e a autentica-ção do usuário. Para identificar a unidade, o ID do armazenamento de chaves inserí-vel deve ser inserido na caixa de diálogo para o login da ferramenta de parametriza-ção "Assist CS..". O ID do armazenamento de chaves está impresso no armazena-mento de chaves. De forma alternativa, o ID do armazenamento de chaves pode serlido diretamente pela ferramenta de parametrização "Assist CS..". Para tal, o usuáriodeve realizar uma verificação de identificação através das indicações LED na unida-de. O mecanismo através do ID do armazenamento de chaves garante que a ferra-menta de parametrização "Assist CS.." esteja conectada à unidade correta. O usuárioé autenticado através da inserção de uma senha.
NOTAÉ fundamental garantir uma identificação inequívoca da unidade a parametrizar.
2663
1326
/PT-
BR –
12/
2020
3 Conceito de segurançaRelatório e verificação técnica de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)18
3.5 Relatório e verificação técnica de segurançaCom o download dos parâmetros, o conjunto de dados aplicativo e a soma de verifi-cação dos dados aplicativos do conjunto de dados da chave são gerados. Se todosos testes estiverem sem irregularidades, a placa de segurança entra em operação. Apartir deste momento, todas as funções configuradas estão ativas.
AVISODependendo da parametrização, a placa de segurança não aciona a função docomponente de segurança STO. Isso pode levar a uma inicialização inesperada doacionamento.Morte ou ferimentos graves.• Certificar-se de que o acionamento não reinicie automaticamente após a para-
metrização da placa de segurança (por ex., configurando um bloqueio de parti-da, removendo comandos de deslocamento).
Depois de fazer download dos parâmetros, poderá ser criado o relatório de aceitação.Durante este processo, o novo valor ParCRC do conjunto de dados "Dados aplicati-vos" é informado ao mestre do protocolo F. O novo valor ParCRC deve ser transferidopara o mestre do protocolo F. Com o relatório de aceitação, o conjunto de dados "Da-dos aplicativos" deve ser implementado em combinação com a placa de segurançado sistema.Após a aceitação existe a possibilidade de divulgar a aceitação através da placa desegurança. A divulgação da aceitação não substitui a própria aceitação a ser realiza-da. Para divulgar a aceitação, a "soma de verificação do relatório de aceitação" é in-formada à placa de segurança.A divulgação da aceitação não é realizada de forma relacionada à segurança e tam-bém não é necessária para a operação relacionada à segurança da placa de segu-rança. A divulgação da aceitação é uma função de apoio ao usuário da placa de se-gurança.
2663
1326
/PT-
BR –
12/
2020
3Conceito de segurançaConceito de segurança MOVISAFE® CS..A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 19
3.6 Conceito de segurança MOVISAFE® CS..AConceitodesegurançaMOVISAFE® CS..A
• A placa de segurança MOVISAFE® CS..A é um componente eletrônico seguro in-tegrado que pode ser operado com ou sem comunicação segura. Os perfisPROFIsafe, FSoE e ISOFAST® estão disponíveis para uma comunicação segura.MOVISAFE® CS..A possui entradas e saídas digitais seguras (F-DI, F-DO) e estádisponível nas seguintes variantes.Placa de segurança MOVISAFE® CSB21A:– 4 entradas segurasPlaca de segurança MOVISAFE® CSS21A:– 4 entradas seguras– 2 saídas seguras de 2 canaisPlaca de segurança MOVISAFE® CSB31A:– 4 entradas seguras– 2 saídas seguras de 2 canais– 2.º Slot do encoder (sem uso para funcionamento seguro)Placa de segurança MOVISAFE® CSS31A:– 4 entradas seguras– 2 saídas seguras de 2 canais– 2.º Slot do encoder (sem uso para funcionamento seguro)Placa de segurança MOVISAFE® CSA31A:– 4 entradas seguras– 2 saídas seguras de 2 canais– 2.º Slot do encoder (para uso para funcionamento seguro)
• A placa de segurança MOVISAFE® CS..A pode ativar ou desativar com segurançao estágio de saída do conversor. O estado de comutação da saída digital internasegura F-DO_STO e, deste modo, a função do componente de segurança STO,deve estar, dentro de um período de 60 segundos por pelo menos 2 segundos(2.5 segundos com diagnóstico avançado ativado), estável "1" ou estável "0".
• O conceito de segurança da placa de segurança MOVISAFE® CS..A é definido pe-la existência de um estado seguro para todos os valores do processo seguros. NoMOVISAFE® CS..A, este é o valor "0" para todas as entradas F-DI e saídas F-DO.
• A placa de segurança MOVISAFE® CS..A foi concebida de acordo com a normaIEC 61508 para SIL 3 e EN ISO 13849‑1 para nível de desempenho e.
• As placas de segurança MOVISAFE® CSS21A e CSS31A podem monitorar comsegurança as funções de movimento em conjunto com os encoders de segurança.
• A placa de segurança MOVISAFE® CSA31A pode monitorar com segurança asfunções de movimento e posição em conjunto com um sistema de encoder segu-ro.
2663
1326
/PT-
BR –
12/
2020

3 Conceito de segurançaFunções do componente de segurança conforme EN 61800-5-2
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)20
3.7 Funções do componente de segurança conforme EN 61800-5-2Neste capítulo estão descritas as funções do componente de segurança confor-me EN 61800‑5‑2. A tabela a seguir mostra a disponibilidade das funções do compo-nente de segurança descritas posteriormente, dependendo da placa de segurançaMOVISAFE® CS..A utilizada.
Placa deseguran-ça CS..A
Função do componente de segurançaEstado parado Movimento Posição
STO SBC SS1-t SS1-r SS2-t SS2-r SOS SLS SSM SSR SDI SLI SLA SLP SCAApenas com encoder FS
CSB21A x x
CSS21A x x x x x x x x x x x x x
CSB31A1) x x x
CSS31A1) x x x x x x x x x x x x x
Com um encoder FS ou conceito de 2 encoders
CSA31A2) x x x x x x x x x x x x x x x1) Possui 2. Conexão do encoder (não usada para funcionamento seguro)2) Possui uma 2ª conexão de encoder que pode ser usada para um funcionamento seguro
3.7.1 STO (Parada Segura Ativa) – Torque desligado de modo seguroSe a função STO estiver ativa, o conversor de frequência não fornece energia para omotor e o acionamento não pode gerar torque. Essa função do componente de segu-rança corresponde a uma parada sem controle conforme EN 60204‑1, categoria deparada 0.
t
V
t1
9007201225613323
= Função do componente de segurança ativav = Velocidadet = Tempot1 = Momento em que a STO é ativada.
NOTAO motor gira por inércia até parar ou é parado mecanicamente.Se possível, é preferível a parada controlada.
2663
1326
/PT-
BR –
12/
2020
3Conceito de segurançaFunções do componente de segurança conforme EN 61800-5-2
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 21
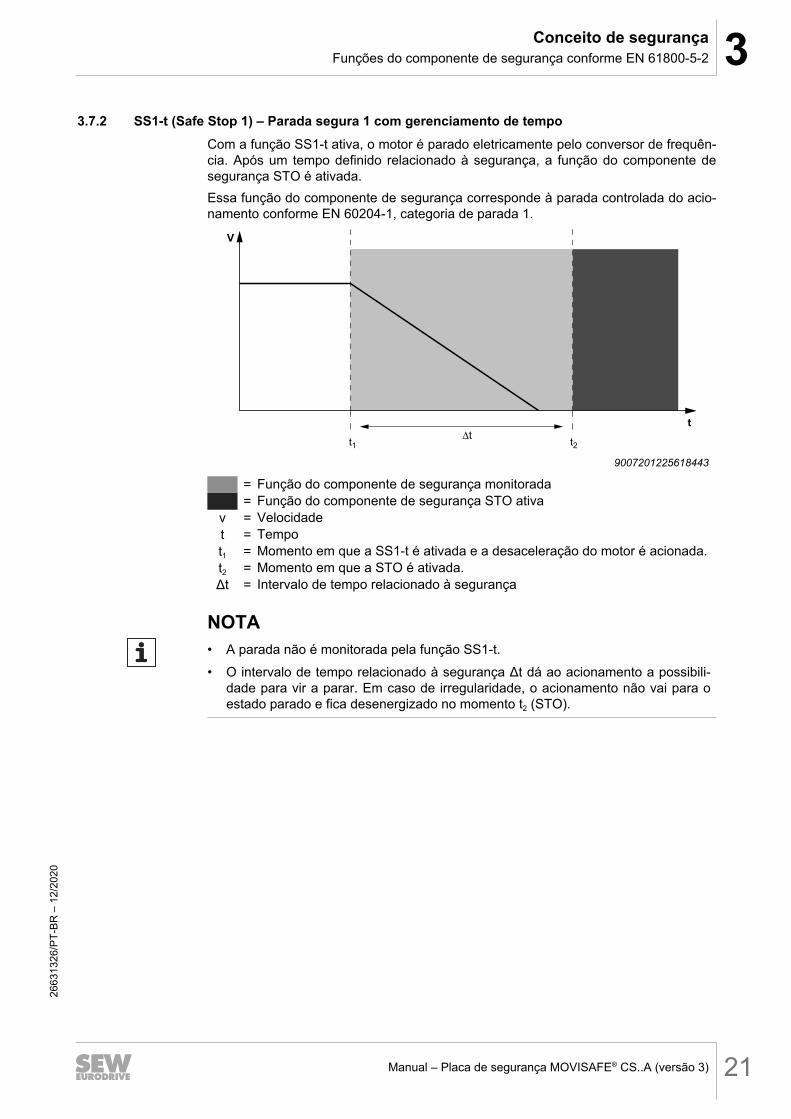
3.7.2 SS1-t (Safe Stop 1) – Parada segura 1 com gerenciamento de tempoCom a função SS1‑t ativa, o motor é parado eletricamente pelo conversor de frequên-cia. Após um tempo definido relacionado à segurança, a função do componente desegurança STO é ativada.Essa função do componente de segurança corresponde à parada controlada do acio-namento conforme EN 60204‑1, categoria de parada 1.
t2t1
t
V
∆t
9007201225618443
= Função do componente de segurança monitorada= Função do componente de segurança STO ativa
v = Velocidadet = Tempot1 = Momento em que a SS1-t é ativada e a desaceleração do motor é acionada.t2 = Momento em que a STO é ativada.Δt = Intervalo de tempo relacionado à segurança
NOTA• A parada não é monitorada pela função SS1-t.• O intervalo de tempo relacionado à segurança Δt dá ao acionamento a possibili-
dade para vir a parar. Em caso de irregularidade, o acionamento não vai para oestado parado e fica desenergizado no momento t2 (STO).
2663
1326
/PT-
BR –
12/
2020
3 Conceito de segurançaFunções do componente de segurança conforme EN 61800-5-2
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)22
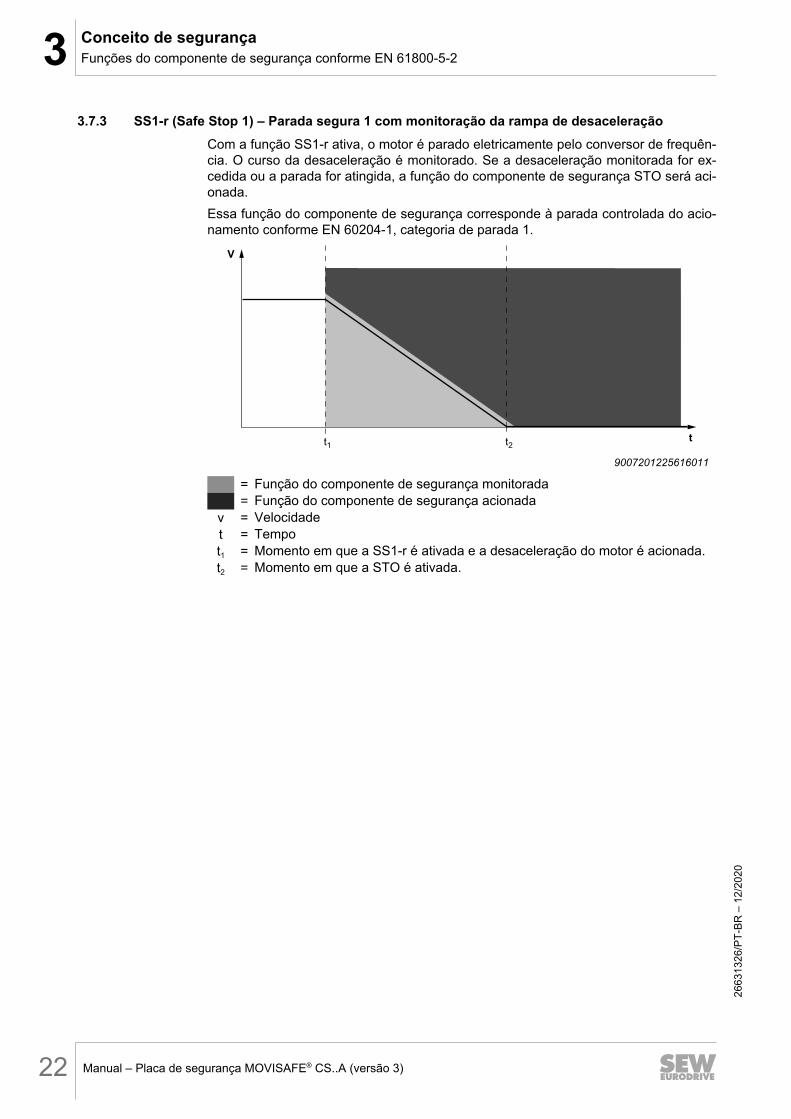
3.7.3 SS1-r (Safe Stop 1) – Parada segura 1 com monitoração da rampa de desaceleraçãoCom a função SS1‑r ativa, o motor é parado eletricamente pelo conversor de frequên-cia. O curso da desaceleração é monitorado. Se a desaceleração monitorada for ex-cedida ou a parada for atingida, a função do componente de segurança STO será aci-onada.Essa função do componente de segurança corresponde à parada controlada do acio-namento conforme EN 60204‑1, categoria de parada 1.
t
V
t1 t2
9007201225616011
= Função do componente de segurança monitorada= Função do componente de segurança acionada
v = Velocidadet = Tempot1 = Momento em que a SS1‑r é ativada e a desaceleração do motor é acionada.t2 = Momento em que a STO é ativada.
2663
1326
/PT-
BR –
12/
2020
3Conceito de segurançaFunções do componente de segurança conforme EN 61800-5-2
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 23
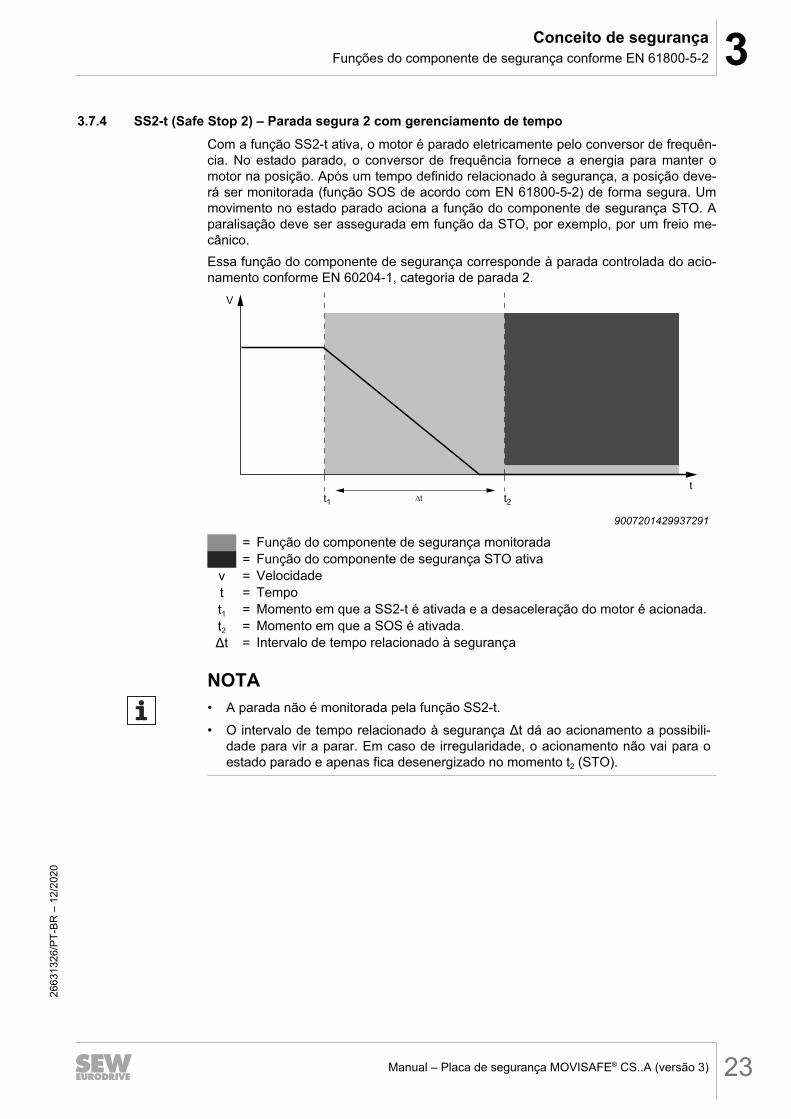
3.7.4 SS2-t (Safe Stop 2) – Parada segura 2 com gerenciamento de tempoCom a função SS2‑t ativa, o motor é parado eletricamente pelo conversor de frequên-cia. No estado parado, o conversor de frequência fornece a energia para manter omotor na posição. Após um tempo definido relacionado à segurança, a posição deve-rá ser monitorada (função SOS de acordo com EN 61800‑5‑2) de forma segura. Ummovimento no estado parado aciona a função do componente de segurança STO. Aparalisação deve ser assegurada em função da STO, por exemplo, por um freio me-cânico.Essa função do componente de segurança corresponde à parada controlada do acio-namento conforme EN 60204‑1, categoria de parada 2.
t1 t2
t
∆t
V
9007201429937291
= Função do componente de segurança monitorada= Função do componente de segurança STO ativa
v = Velocidadet = Tempot1 = Momento em que a SS2-t é ativada e a desaceleração do motor é acionada.t2 = Momento em que a SOS é ativada.Δt = Intervalo de tempo relacionado à segurança
NOTA• A parada não é monitorada pela função SS2-t.• O intervalo de tempo relacionado à segurança Δt dá ao acionamento a possibili-
dade para vir a parar. Em caso de irregularidade, o acionamento não vai para oestado parado e apenas fica desenergizado no momento t2 (STO).
2663
1326
/PT-
BR –
12/
2020
3 Conceito de segurançaFunções do componente de segurança conforme EN 61800-5-2
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)24
3.7.5 SS2-r (Safe Stop 2) – Parada segura 2 com monitoração da rampa de desaceleraçãoCom a função SS2‑r ativa, o motor é parado eletricamente pelo conversor de frequên-cia. O curso da desaceleração é monitorado. Depois de parar, a posição deverá sermonitorada (função SOS de acordo com EN 61800‑5‑2) de forma segura. A ultrapas-sagem da desaceleração em caso de parada ou o movimento no estado parado acio-na função do componente de segurança STO. A paralisação deve ser assegurada emfunção da STO, por exemplo, por um freio mecânico.Essa função do componente de segurança corresponde à parada controlada do acio-namento conforme EN 60204‑1, categoria de parada 2.
t
V
t1 t2
9007201225698059
= Função do componente de segurança monitorada= Função do componente de segurança STO ativa
v = Velocidadet = Tempot1 = Momento em que a SS2-r é ativada e a desaceleração do motor é acionada.t2 = Momento em que a SOS é ativada.
2663
1326
/PT-
BR –
12/
2020
3Conceito de segurançaFunções do componente de segurança conforme EN 61800-5-2
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 25
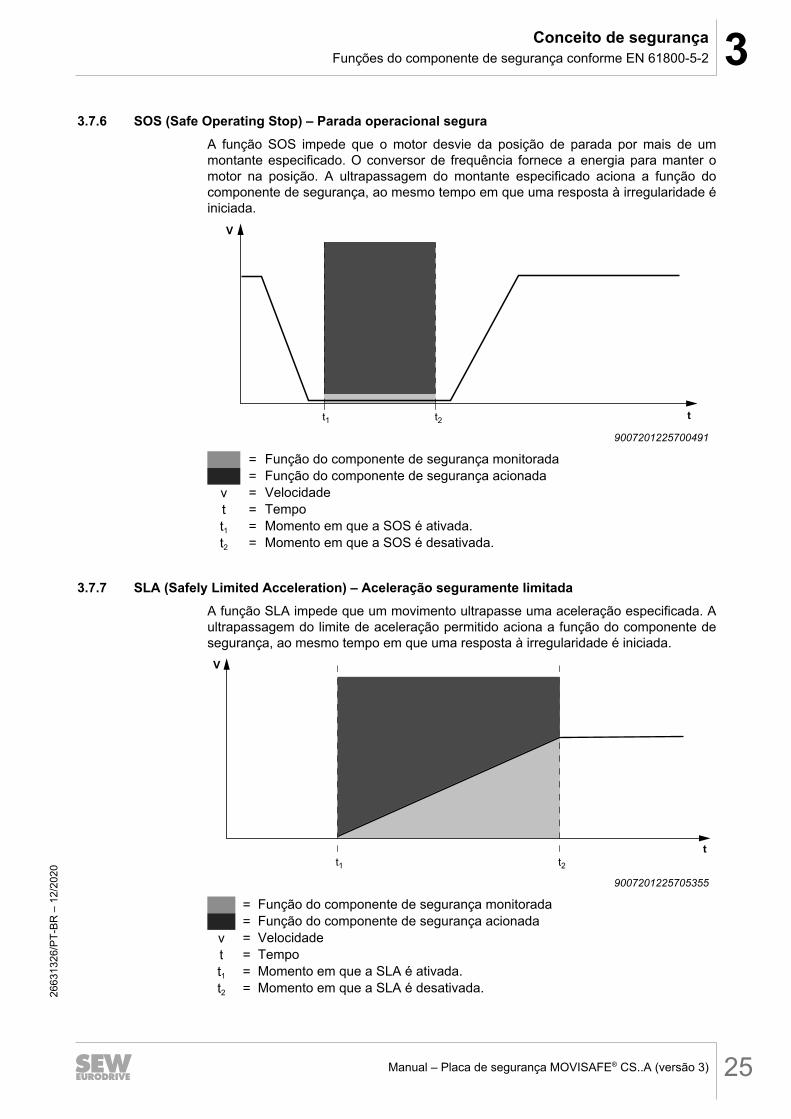
3.7.6 SOS (Safe Operating Stop) – Parada operacional seguraA função SOS impede que o motor desvie da posição de parada por mais de ummontante especificado. O conversor de frequência fornece a energia para manter omotor na posição. A ultrapassagem do montante especificado aciona a função docomponente de segurança, ao mesmo tempo em que uma resposta à irregularidade éiniciada.
t1 t2t
V
9007201225700491
= Função do componente de segurança monitorada= Função do componente de segurança acionada
v = Velocidadet = Tempot1 = Momento em que a SOS é ativada.t2 = Momento em que a SOS é desativada.
3.7.7 SLA (Safely Limited Acceleration) – Aceleração seguramente limitadaA função SLA impede que um movimento ultrapasse uma aceleração especificada. Aultrapassagem do limite de aceleração permitido aciona a função do componente desegurança, ao mesmo tempo em que uma resposta à irregularidade é iniciada.
t1 t2
t
V
9007201225705355
= Função do componente de segurança monitorada= Função do componente de segurança acionada
v = Velocidadet = Tempot1 = Momento em que a SLA é ativada.t2 = Momento em que a SLA é desativada.26
6313
26/P
T-BR
– 1
2/20
20

3 Conceito de segurançaFunções do componente de segurança conforme EN 61800-5-2
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)26
3.7.8 SLS (Safely Limited Speed) – Velocidade seguramente limitadaA função SLS impede que o acionamento ultrapasse uma velocidade especificada. Aultrapassagem da velocidade permitida aciona a função do componente de seguran-ça, ao mesmo tempo em que uma resposta à irregularidade é iniciada.
t
V
t1 t2
9007201225702923
= Função do componente de segurança monitorada= Função do componente de segurança acionada
v = Velocidadet = Tempot1 = Momento em que a SLS é ativada.t2 = Momento em que a SLS é desativada.
3.7.9 SSR (Safe Speed Range) – Faixa de velocidade seguraA função SSR impede que a velocidade do acionamento saia de uma faixa predeter-minada. Quando um valor excede ou fica abaixo da faixa de velocidade permitida aci-ona a função do componente de segurança, ao mesmo tempo em que uma respostaà irregularidade é iniciada.
t1 t2
t
V
9007201659986827
= Função do componente de segurança monitorada= Função do componente de segurança acionada
v = Velocidadet = Tempot1 = Momento em que a SSR é ativada.t2 = Momento em que a SSR é desativada. 26
6313
26/P
T-BR
– 1
2/20
20
3Conceito de segurançaFunções do componente de segurança conforme EN 61800-5-2
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 27
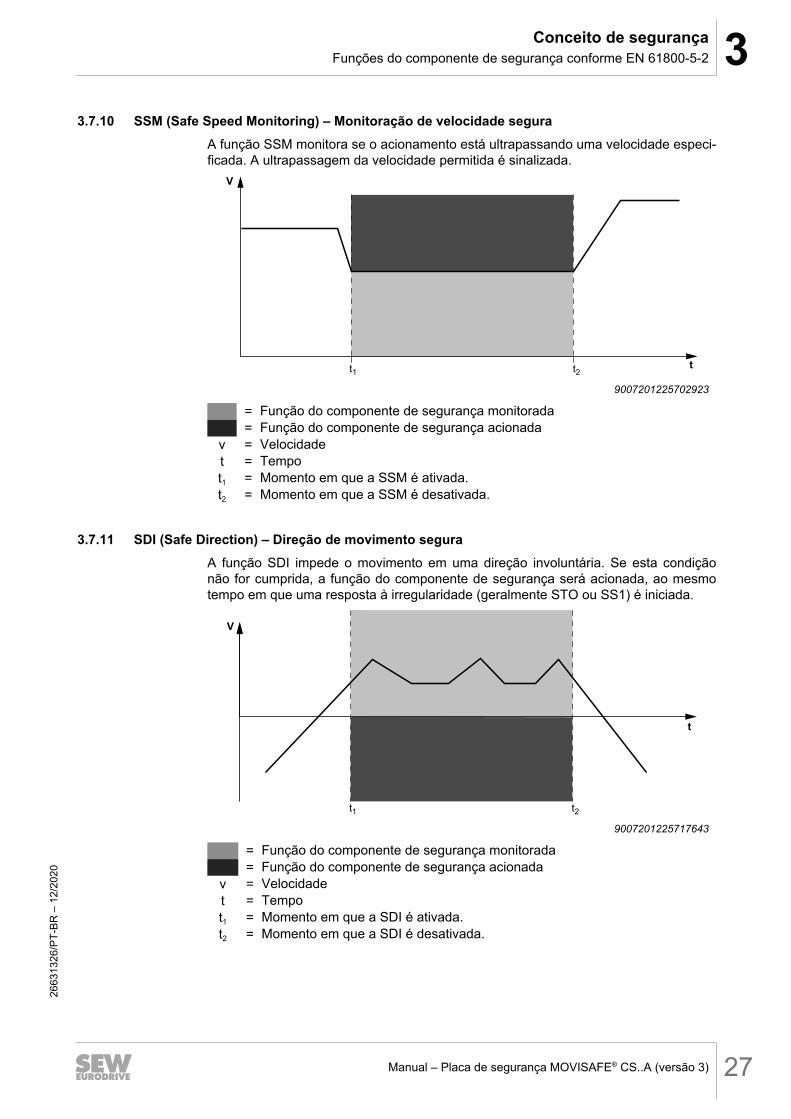
3.7.10 SSM (Safe Speed Monitoring) – Monitoração de velocidade seguraA função SSM monitora se o acionamento está ultrapassando uma velocidade especi-ficada. A ultrapassagem da velocidade permitida é sinalizada.
t
V
t1 t2
9007201225702923
= Função do componente de segurança monitorada= Função do componente de segurança acionada
v = Velocidadet = Tempot1 = Momento em que a SSM é ativada.t2 = Momento em que a SSM é desativada.
3.7.11 SDI (Safe Direction) – Direção de movimento seguraA função SDI impede o movimento em uma direção involuntária. Se esta condiçãonão for cumprida, a função do componente de segurança será acionada, ao mesmotempo em que uma resposta à irregularidade (geralmente STO ou SS1) é iniciada.
t
V
t1 t2
9007201225717643
= Função do componente de segurança monitorada= Função do componente de segurança acionada
v = Velocidadet = Tempot1 = Momento em que a SDI é ativada.t2 = Momento em que a SDI é desativada.
2663
1326
/PT-
BR –
12/
2020
3 Conceito de segurançaFunções do componente de segurança conforme EN 61800-5-2
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)28
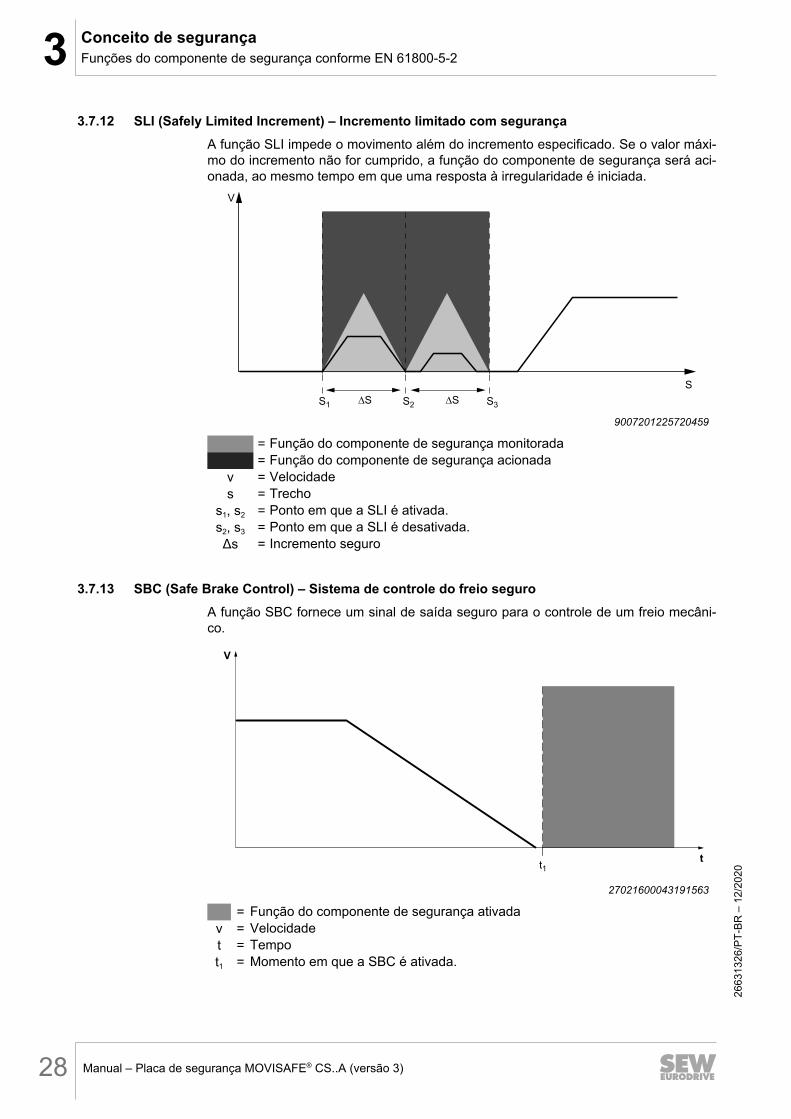
3.7.12 SLI (Safely Limited Increment) – Incremento limitado com segurançaA função SLI impede o movimento além do incremento especificado. Se o valor máxi-mo do incremento não for cumprido, a função do componente de segurança será aci-onada, ao mesmo tempo em que uma resposta à irregularidade é iniciada.
S
V
∆S ∆SS1 S2 S3
9007201225720459
= Função do componente de segurança monitorada= Função do componente de segurança acionada
v = Velocidades = Trecho
s1, s2 = Ponto em que a SLI é ativada.s2, s3 = Ponto em que a SLI é desativada.Δs = Incremento seguro
3.7.13 SBC (Safe Brake Control) – Sistema de controle do freio seguroA função SBC fornece um sinal de saída seguro para o controle de um freio mecâni-co.
t1t
V
27021600043191563
= Função do componente de segurança ativadav = Velocidadet = Tempot1 = Momento em que a SBC é ativada.
2663
1326
/PT-
BR –
12/
2020
3Conceito de segurançaFunções do componente de segurança conforme EN 61800-5-2
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 29
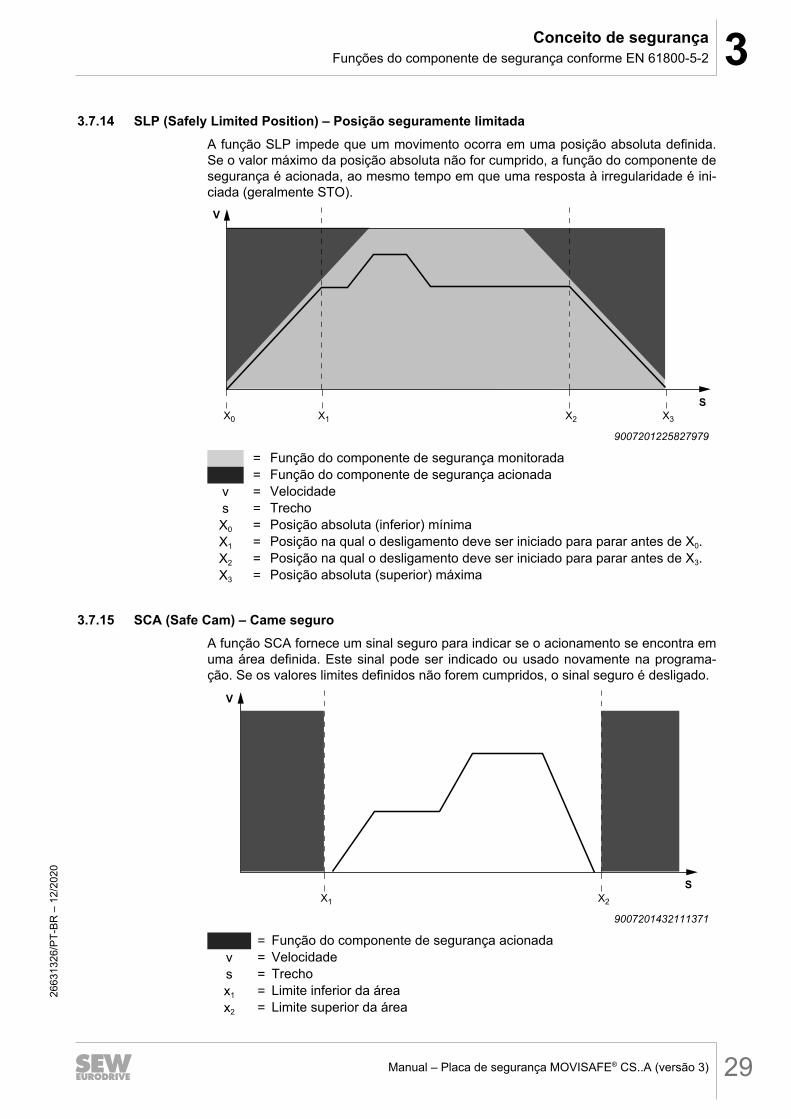
3.7.14 SLP (Safely Limited Position) – Posição seguramente limitadaA função SLP impede que um movimento ocorra em uma posição absoluta definida.Se o valor máximo da posição absoluta não for cumprido, a função do componente desegurança é acionada, ao mesmo tempo em que uma resposta à irregularidade é ini-ciada (geralmente STO).
S
V
X0 X1 X2 X3
9007201225827979
= Função do componente de segurança monitorada= Função do componente de segurança acionada
v = Velocidades = TrechoX0 = Posição absoluta (inferior) mínimaX1 = Posição na qual o desligamento deve ser iniciado para parar antes de X0.X2 = Posição na qual o desligamento deve ser iniciado para parar antes de X3.X3 = Posição absoluta (superior) máxima
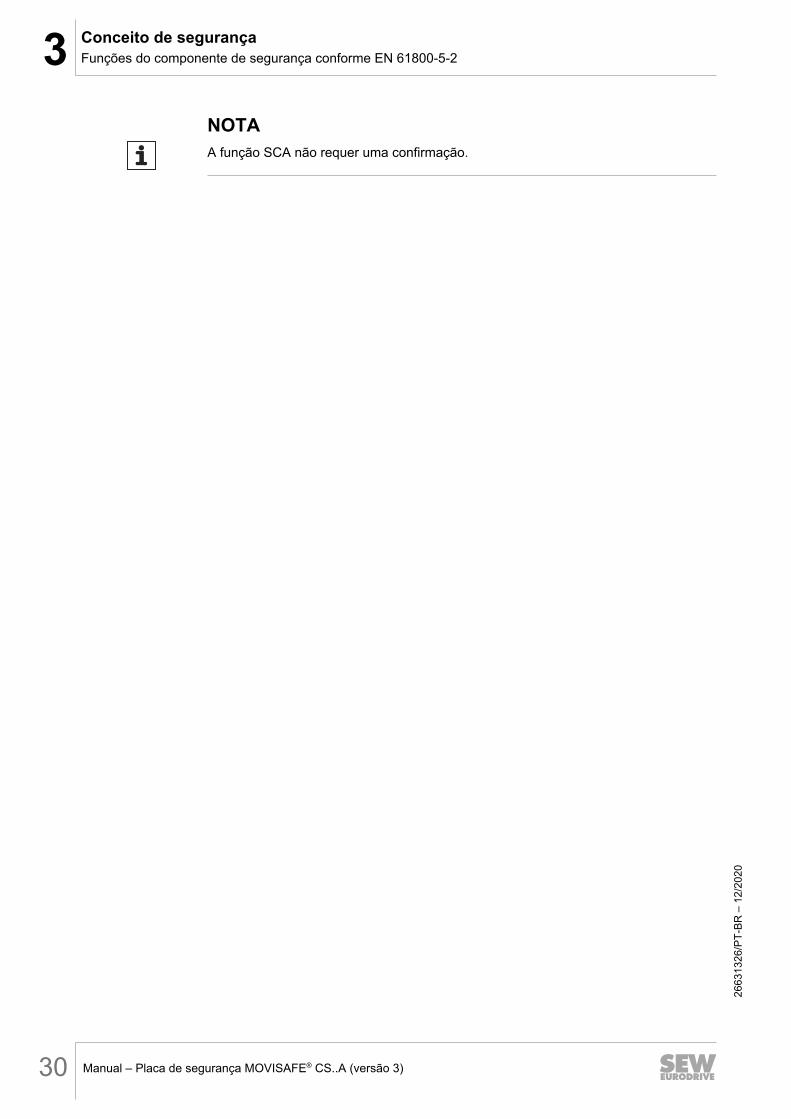
3.7.15 SCA (Safe Cam) – Came seguroA função SCA fornece um sinal seguro para indicar se o acionamento se encontra emuma área definida. Este sinal pode ser indicado ou usado novamente na programa-ção. Se os valores limites definidos não forem cumpridos, o sinal seguro é desligado.
S
V
X1 X2
9007201432111371
= Função do componente de segurança acionadav = Velocidades = Trechox1 = Limite inferior da áreax2 = Limite superior da área
2663
1326
/PT-
BR –
12/
2020
3 Conceito de segurançaFunções do componente de segurança conforme EN 61800-5-2
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)30
NOTAA função SCA não requer uma confirmação.
2663
1326
/PT-
BR –
12/
2020
3Conceito de segurançaConceito de segurança Assist CS..
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 31
3.8 Conceito de segurança Assist CS..
3.8.1 Parâmetros de segurançaPara a parametrização das funções do componente de segurança, o MOVISAFE®
CS.. A possui parâmetros de segurança ajustáveis.Os parâmetros de segurança determinam o comportamento das respectivas funçõesdo componente de segurança e, portanto, são relevantes para a segurança. Todos osparâmetros de segurança estão resumidos no jogo de parâmetros.Com o download dos parâmetros no Assist CS.. são realizadas as seguintes ações:• Parametrização da placa de segurança.• Geração da soma de verificação "Dados aplicativos" do conjunto de dados da
chave no armazenamento de chaves.• Uma parametrização alterada exclui o status "Aceitação".Desta forma, o armazenamento de chaves está ligado à respectiva parametrizaçãoatravés do download dos parâmetros.
3.8.2 Conceito e sequência de testeA parametrização da placa de segurança MOVISAFE® CS..A é realizada através deum PC de engenharia com a ferramenta de parametrização "Assist CS..". Já que oPC e a ferramenta de parametrização "Assist CS.." não estão relacionados à segu-rança e, portanto, podem conter irregularidades, o conceito de segurança prevê asseguintes medidas:• Identificar MOVISAFE® CS..A.• Ao estabelecer uma conexão com a placa de segurança MOVISAFE® CS..A, é ne-
cessário inserir o ID do armazenamento de chaves através de uma caixa de diálo-go.
• Procedimento de ajuste de parâmetro orientado na ferramenta de parametrização"Assist CS.." com recursos de segurança integrados, como verificação de plausibi-lidade da entrada.
• Conclusão da parametrização com subsequente fornecimento de um relatório deaceitação para aceitar as funções do componente de segurança.
2663
1326
/PT-
BR –
12/
2020
4 Condições de tecnologia de segurançaRequisitos para a instalação
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)32
4 Condições de tecnologia de segurança4.1 Requisitos para a instalação
• Os cabos de energia e os cabos de sinal seguras devem ser instalados separada-mente.
• A tecnologia de fiação deve ser conforme a norma EN 60204-1.• Os cabos de controle seguro da placa de segurança MOVISAFE® CS..A devem
ser instalados conforme EMC. Para tal, observar as seguintes informações:– Observar os regulamentos vigentes para a aplicação e as informações nas ins-
truções de operação do conversor.– Se as saídas e/ou entradas seguras estiverem conectadas com dois canais, os
cabos correspondentes devem ser instalados próximos uns dos outros. Os ca-bos devem ter o mesmo comprimento.
• Garantir que não haja indução de tensão nos cabos de sinal seguros.• Fora de um espaço de instalação fechado, os cabos de sinal relacionados à tec-
nologia de segurança devem ser protegidas contra danos externos.• Para todas as tensões de alimentação de 24 VCC do MOVIDRIVE® modular/sys-
tem/technology, só é permitido utilizar fontes de tensão com isolamento seguro(SELV/PELV) de acordo com a EN 60204-1 e EN 61131-2. Em caso de uma únicairregularidade, a tensão entre as saídas ou entre uma saída qualquer e partes li-gadas ao terra não pode exceder a tensão contínua de 60 V. Isso também se apli-ca a sensores que são fornecidos com uma fonte de alimentação separada e co-nectados à placa de segurança MOVISAFE® CS..A.
• Ao conectar o encoder integrado EI7C FS ao MOVIDRIVE® modular/system/tech-nology, nenhum sinal TF deverá ser carregado no cabo do encoder.
• A placa de segurança deve ser protegida contra contaminação por aterramento,por exemplo, por instalação em um painel elétrico com grau de proteção IP54 con-forme IEC 60529.Supondo que a contaminação condutiva possa ser removida do local de instala-ção, um grau de proteção menor do painel elétrico também é permitido respeitan-do as normas aplicáveis (p. ex. EN 60204-1). Isso também vale para a condensa-ção temporária, p. ex. devido a mudanças rápidas da temperatura ambiente.
4.2 Requisitos para o cabo do encoder4.2.1 Cabo do encoder SEN/COS
• Utilizar cabo do encoder blindado. Instalar a blindagem em ambos os lados.• Comprimento máximo do cabo do encoder: 100 m• Utilizar cabos do encoder pré-montados da SEW‑EURODRIVE. Se forem utiliza-
dos outros cabos do encoder, observar os seguintes requisitos:– Comprimento do cabo do encoder ≤ 50 m
A seção transversal de cada condutor do cabo do encoder deve ser≥ 0.25 mm2. O nível de resistência dos condutores não pode exceder 78 Ω/km(a 20 °C).
– Comprimento do cabo do encoder > 50 m:
2663
1326
/PT-
BR –
12/
2020
4Condições de tecnologia de segurançaRequisitos para o cabo do encoder
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 33
A seção transversal dos fios para a tensão de alimentação do encoder e GNDdeve ser ≥ 0.5 mm2. O nível de resistência destes fios não pode exceder 39 Ω/km. O nível de resistência dos condutores sinal pode exceder 78 Ω/km (a20 °C).
– Os pares de sinais diferenciais (por ex. os sinais do canal A e A, B e B, C e C,Data+ e Data-) devem ser conduzidos através dos fios trançados.
– O cabo do encoder não pode exceder os seguintes níveis de capacidade:Capacitância Condutor/Condutor: CA’ = 70 pF/mCapacitância Condutor/Blindagem: CS’ = 120 pF/m
– No caminho do sinal do encoder até o conversor, não há ramificações até ou-tras unidades nos sinais do encoder.
4.2.2 Cabo do encoder HTL• Utilizar cabo do encoder blindado. Instalar a blindagem em ambos os lados.• Comprimento máximo do cabo do encoder: 100 m• Utilizar cabos do encoder pré-montados da SEW‑EURODRIVE. Se forem utiliza-
dos outros cabos do encoder, observar os seguintes requisitos:– A seção transversal de cada condutor do cabo do encoder deve ser
≥ 0.25 mm2. O nível de resistência dos condutores não pode exceder 78 Ω/km(a 20 °C).
– O cabo do encoder não pode conduzir outros sinais que não sejam os sinaisdo encoder, ou seja, os sinais do encoder não podem ser conduzidos em umcabo com outros sinais. Os fios dos sinais do encoder devem ser trançadosaos pares da seguinte maneira:UB e GNDA+ e A-B+ e B-
– O cabo do encoder não pode exceder os seguintes níveis de capacidade:Capacitância Condutor/Condutor: CA’ = 70 pF/mCapacitância Condutor/Blindagem: CS’ = 120 pF/m
– No caminho do sinal do encoder até o conversor, não há ramificações até ou-tras unidades nos sinais do encoder.
4.2.3 Cabo do encoder SSI• Utilizar cabo do encoder blindado. Instalar a blindagem em ambos os lados.• Comprimento máximo do cabo do encoder: 100 m• Utilizar cabos do encoder pré-montados da SEW‑EURODRIVE. Se forem utiliza-
dos outros cabos do encoder, observar os seguintes requisitos:– Comprimento do cabo do encoder ≤ 50 m:
A seção transversal de cada condutor do cabo do encoder deve ser≥ 0.25 mm2. O nível de resistência dos condutores não pode exceder 78 Ω/km(a 20 °C).
– Comprimento do cabo do encoder ≥ 50 m:
2663
1326
/PT-
BR –
12/
2020
4 Condições de tecnologia de segurançaRequisitos para os sensores e atuadores externos
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)34
A seção transversal dos fios para a tensão de alimentação do encoder e GNDdeve ser ≥ 0.5 mm2. O nível de resistência destes fios não pode exceder 39 Ω/km.
– O nível de resistência dos condutores sinal pode exceder 78 Ω/km (a 20 °C).– Pares de sinais diferenciais (por ex., os sinais do canal Ciclo+ e Ciclo-, Data +
e Data-) devem ser conduzidos através dos fios trançados.– O cabo do encoder não pode exceder os seguintes níveis de capacidade:
Capacitância Condutor/Condutor: CA’ = 70 pF/mCapacitância Condutor/Blindagem: CS’ = 120 pF/m
– No caminho do sinal do encoder até o conversor, não há ramificações até ou-tras unidades nos sinais do encoder.
– A SEW‑EURODRIVE recomenda dispor os cabos do encoder de forma contí-nua.Se forem necessários pontos de separação, os conectores devem ser adequa-dos ao ambiente correspondente e deve ser garantida a blindagem contínua eininterrupta dos sinais.
4.3 Requisitos para os sensores e atuadores externos• A quantidade e a utilização de sensores e atuadores externos para conexão nas
entradas e saídas seguras da placa de segurança MOVISAFE® CS..A é responsa-bilidade do planejador de projetos e do operador do sistema ou da máquina.
• Para atingir o nível de desempenho requerido (PL/SIL), deve-se usar sensores eatuadores adequados e apropriadamente qualificados, e observar os esquemasde conexões e instruções do capítulo "Entradas seguras" e "Saídas seguras". Osencoders permitidos estão descritos no capítulo "Requisitos dos encoders".
4.4 Requisitos para a colocação em operaçãoApós a parametrização e colocação em operação da placa de segurança CS..A, ooperador deve verificar e documentar se todas as funções do componente de segu-rança estão sendo executadas corretamente. Isto é suportado por um relatório deaceitação com a ferramenta de parametrização "Assist CS..".Para aplicações MOVIDRIVE® com torque desligado de modo seguro• segundo a categoria de parada 0, 1 ou 2 de acordo com EN 60204-1,• e evitar a partida inesperada de acordo com a norma EN ISO 14118deve-se executar principalmente os testes de colocação em funcionamento do dispo-sitivo de desligamento e a instalação correta dos cabos e protocolar.
2663
1326
/PT-
BR –
12/
2020
4Condições de tecnologia de segurançaRequisitos quando da parada de emergência de acordo com a norma EN 60204-1 (parada de emergência)
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 35
NOTA• A fim de evitar situação de perigo na aplicação pretendida, o usuário deve verifi-
car se o tempo de resposta à irregularidade de cada função do componente desegurança é inferior ao tempo de resposta à irregularidade máximo permitido doaplicativo quando ocorre uma irregularidade. O tempo máximo de resposta a irre-gularidade aprovado não pode ser ultrapassado!
• O usuário deve garantir que os requisitos do Safety Integrity Level (SIL) exigidode acordo com a IEC 61508 ou Nível de Desempenho (PL) de acordo com aEN ISO 13849-1 sejam cumpridos.
4.5 Requisitos quando da parada de emergência de acordo com a normaEN 60204-1 (parada de emergência)
As placas de segurança MOVISAFE® CS..A em combinação com um dispositivo decontrole de parada de emergência e o controle externo são apropriados para imple-mentar uma parada de emergência de acordo com a norma EN 60204-1.
AVISONo caso de que haja um comando de deslocamento pendente, o acionamento é rei-niciado após a placa de segurança ter sido confirmada.Morte ou ferimentos graves.• Remover o comando de deslocamento antes de confirmar a placa de segurança.
4.6 Requisitos dos encoders4.6.1 Requisitos gerais
Para todos os encoders não autorizados pela SEW‑EURODRIVE, o usuário deveavaliar os efeitos dos seguintes cenários:• Sobretensão no encoder• Curto-circuito na interface do encoderA avaliação pelo usuário pode ser feita com o auxílio da respectiva documentação doproduto ou por meio de teste.Além disso, deve-se garantir que o sistema se mova a uma velocidade maior que avelocidade mínima pelo menos a cada 3 meses.
2663
1326
/PT-
BR –
12/
2020
4 Condições de tecnologia de segurançaRequisitos dos encoders
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)36
4.6.2 Encoders de segurança permitidos da SEW‑EURODRIVEOs seguintes encoders de segurança da SEW‑EURODRIVE podem ser utilizadoscom as placas de segurança MOVISAFE® CS..A. Mais informações sobre os enco-ders de segurança podem ser encontradas na documentação associada.
AVISOPerda da função do componente de segurança através da utilização de encoders desegurança desatualizados AS7W ou AG7W, por exemplo, em instalações existen-tes.Morte ou ferimentos gravesü A utilização dos seguintes encoders de segurança com as placas de segurança
MOVISAFE® CS..A não é permitida:• AS7W: Códigos 13630733 e 13630768• AG7W: Código 13630849
→ Utilizar as versões mais recentes dos encoders AS7W/AG7W.
Motores CA/servomotores assíncronos• ES7S/EG7S• AS7W/AG7W• EK8S/AK8W• EI7C FS
NOTAAté que esteja disponível uma versão MOVISUITE® em que os encoders de seguran-ça EK8S/AK8W possam ser selecionados na ferramenta de parametrização "AssistCS..", selecionar os seguintes encoders:• E.7S em vez de EK8S• A.7W em vez de AK8W
Servomotores• AK0H• AK1HPara implementar uma função do componente de segurança com os encoders AK0Hou AK1H, o motor deve ser colocado em operação com o modo de controle CFC.Recomendam-se as seguintes configurações do conversor:• Ativação do seguinte monitoramento de erro por atraso• Ativação da monitoração da rotação• Ativação do monitoramento do encoder
2663
1326
/PT-
BR –
12/
2020
4Condições de tecnologia de segurançaRequisitos dos encoders
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 37
4.6.3 Irregularidade de quantização
PosiçãoO valor atual da posição está constituído diretamente dos incrementos do encoder. Is-so resulta, no tocante a uma revolução do encoder, na seguinte irregularidade dequantização do valor atual da posição que está incluído em todas as funções de posi-ção:• EI7C FS: 7.5°• AK0H: 4.3°• AK1H: 0.53°• E..7S: 0.53°• A..7W: 0.27°• EK8S: 0.53°• AK8W: 0.27°
VelocidadeO cálculo da velocidade determina a velocidade média no intervalo de tempo definidopor meio do tempo do filtro Velocidade:Irregularidade de quantização_v em min-1 =(15 s x min-1) × Fator de escala_Denominador/(Fator de escala_Numerador x tempode filtro_parametrizado)Parâmetros envolvidos (CSA31A):• Fator de escala_Numerador:
– 8381.2 (encoder 1)– 8382.2 (encoder 2)
• Fator de escala_Denominador:– 8381.3 (encoder 1)– 8382.3 (encoder 2)
• Tempo de filtro_parametrizado:– 8708.3 (encoder 1)– 8713.3 (encoder 2)
Parâmetros envolvidos (CSS..A):• Fator de escala_Numerador (= número de pulsos do encoder selecionado):
– 8708.1 (encoder 1)• Fator de escala_Denominador: 1
O fator de escala é definido permanentemente com base no tipo de encoder confi-gurado.
• Tempo de filtro_parametrizado:– 8708.3 (encoder 1)
Para a irregularidade de quantização relacionada com o procedimento, é acrescidaoutra irregularidade de 0.3% da velocidade real:Irregularidade_v_SinCos = velocidade_real x 0.3 % + irregularidade_de_quantiza-ção_v
2663
1326
/PT-
BR –
12/
2020
4 Condições de tecnologia de segurançaRequisitos dos encoders
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)38
O cálculo de velocidade do encoder EI7C FS determina a velocidade média atravésdos últimos 4 incrementos do encoder detectados. Deste modo, o tempo de respostada avaliação do encoder depende da velocidade real. A irregularidade no valor de ve-locidade calculado é de no máx. 1% da velocidade real:Irregularidade_v_EI7C FS = velocidade_real x 1%Ao definir o parâmetro Tempo de filtragem Velocidade HTL (8708.4). a velocidade cal-culada pode ser filtrada através de um filtro de valor médio oscilante com o compri-mento parametrizado.
AceleraçãoO cálculo da aceleração determina a aceleração média na faixa de tempo definidaatravés do tempo de filtragem Aceleração. Ao mesmo tempo a irregularidade dequantização decorrente diminui com o aumento do tempo de filtragem. Para tal, otempo de resposta aumenta de acordo com o tempo do filtragem.Irregularidade_de_quantização_a em min-1 s =(120 s x min-1) × Fator de escala_Denominador/(Fator de escala_Numerador x tempode filtro_parametrizado)2)(15 s x min-1) × Fator de escala_Denominador/(Fator de escala_Numerador x tempode filtro_parametrizado)Parâmetros envolvidos (CSA31A):• Fator de escala_Numerador:
– 8381.2 (encoder 1)– 8382.2 (encoder 2)
• Fator de escala_Denominador:– 8381.3 (encoder 1)– 8382.3 (encoder 2)
• Tempo de filtro_parametrizado:– 8708.2 (encoder 1)– 8713.2 (encoder 2)
Parâmetros envolvidos (CSS..A):• Fator de escala_Numerador (= número de pulsos do encoder selecionado):
– 8708.1 (encoder 1)• Fator de escala_Denominador: 1
O fator de escala é definido permanentemente com base no tipo de encoder confi-gurado.
• Tempo de filtro_parametrizado:– 8708.3 (encoder 1)
Para a irregularidade de quantização relacionada com o procedimento, é acrescidaoutra irregularidade de 0.5% da aceleração real:Irregularidade_a_SinCos = aceleração_real x 0.5 % + irregularidade_de_quantiza-ção_a
2663
1326
/PT-
BR –
12/
2020
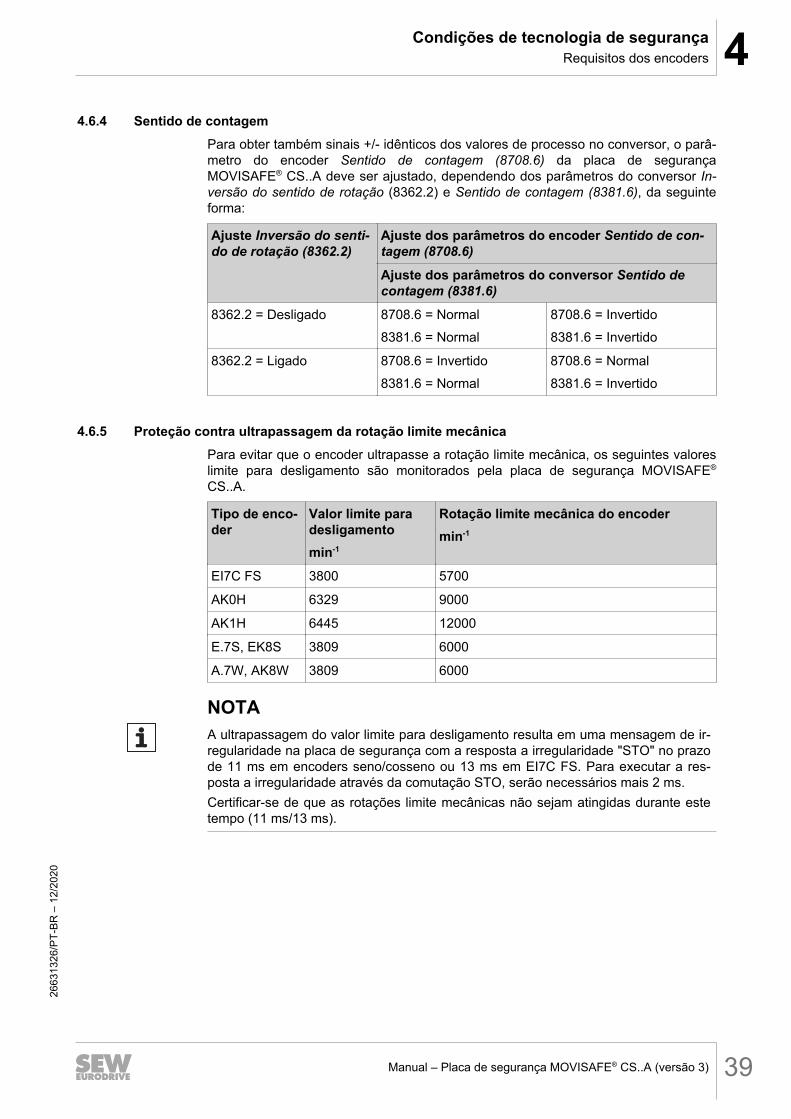
4Condições de tecnologia de segurançaRequisitos dos encoders
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 39
4.6.4 Sentido de contagemPara obter também sinais +/- idênticos dos valores de processo no conversor, o parâ-metro do encoder Sentido de contagem (8708.6) da placa de segurançaMOVISAFE® CS..A deve ser ajustado, dependendo dos parâmetros do conversor In-versão do sentido de rotação (8362.2) e Sentido de contagem (8381.6), da seguinteforma:
Ajuste Inversão do senti-do de rotação (8362.2)
Ajuste dos parâmetros do encoder Sentido de con-tagem (8708.6)
Ajuste dos parâmetros do conversor Sentido decontagem (8381.6)
8362.2 = Desligado 8708.6 = Normal8381.6 = Normal
8708.6 = Invertido8381.6 = Invertido
8362.2 = Ligado 8708.6 = Invertido8381.6 = Normal
8708.6 = Normal8381.6 = Invertido
4.6.5 Proteção contra ultrapassagem da rotação limite mecânicaPara evitar que o encoder ultrapasse a rotação limite mecânica, os seguintes valoreslimite para desligamento são monitorados pela placa de segurança MOVISAFE®
CS..A.
Tipo de enco-der
Valor limite paradesligamentomin-1
Rotação limite mecânica do encodermin-1
EI7C FS 3800 5700
AK0H 6329 9000
AK1H 6445 12000
E.7S, EK8S 3809 6000
A.7W, AK8W 3809 6000
NOTAA ultrapassagem do valor limite para desligamento resulta em uma mensagem de ir-regularidade na placa de segurança com a resposta a irregularidade "STO" no prazode 11 ms em encoders seno/cosseno ou 13 ms em EI7C FS. Para executar a res-posta a irregularidade através da comutação STO, serão necessários mais 2 ms.Certificar-se de que as rotações limite mecânicas não sejam atingidas durante estetempo (11 ms/13 ms).
2663
1326
/PT-
BR –
12/
2020
4 Condições de tecnologia de segurançaRequisitos dos encoders
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)40
4.6.6 Encoders permitidos para MOVISAFE® CSA31A
Encoder seno/cossenoO limite para a detecção de velocidade excessiva possui uma irregularidade de quan-tização para encoders seno/cosseno, cujo montante é o seguinte (em relação ao eixodo encoder):Irregularidade = 3000/número de pulsos em min-1A velocidade de operação máxima deve permanecer abaixo do valor definido pelo fa-tor de quantização.O erro angular máximo do valor de posição gerado pela avaliação do encoder seno/cosseno, com base no eixo do motor, resulta da seguinte forma:• 2.160° × Fator de escala_Denominador/Fator de escala_NumeradorParâmetros envolvidos:• Fator de escala_Numerador
– 8381.2 (encoder 1)– 8382.2 (encoder 2)
• Fator de escala_Denominador– 8381.3 (encoder 1)– 8382.3 (encoder 2)
A fim de aumentar a robustez da avaliação do sinal incremental, a tolerância a irregu-laridades pode ser aumentada através do seguinte parâmetro:• 8708.24 (encoder 1)• 8713.24 (encoder 2)
Tolerância a irre-gularidades - Ava-liação seno/cosse-no
Define-se o número máximo de ciclos de diagnóstico consecutivos com irregularida-des (500 μs) que ainda não devem conduzir a uma resposta à irregularidade.Uma resposta à irregularidade ocorre nos seguintes casos:• O número definido de ciclos de diagnóstico consecutivos com irregularidades foi
excedido• A proporção de ciclos de diagnóstico com e sem irregularidades durante um perío-
do mais longo é ≥ 1/5.Informação Com a tolerância a irregularidades ativada, os incrementos podem ser perdidos. Co-
mo resultado, o valor da posição gerado pode vir a ter irregularidades. Isso deve serdetectado por meio de um segundo canal do encoder ao gerar o valor da posição.Se um encoder relevante à segurança for avaliado como encoder 1 e as funções desegurança da aplicação dependerem exclusivamente disso, a tolerância a irregulari-dades para o encoder 1 deve ser desativada ou ajustada para o valor "0".
Encoders lineares segurosO encoder de segurança CDV75/CDH75 da TR electronic pode ser utilizado com aplaca de segurança MOVISAFE® CSA31A. Mais informações sobre o encoder de se-gurança podem ser encontradas na documentação associada.
4.6.7 Requisitos dos encoders SSI• Observar as informações no capítulo "Requisitos técnicos de segurança" relativas
ao comprimento do cabo e à frequência do ciclo SSI e reduzir a frequência do ci-clo para 250 kHz ou 125 kHz se o cabo for longo. 26
6313
26/P
T-BR
– 1
2/20
20
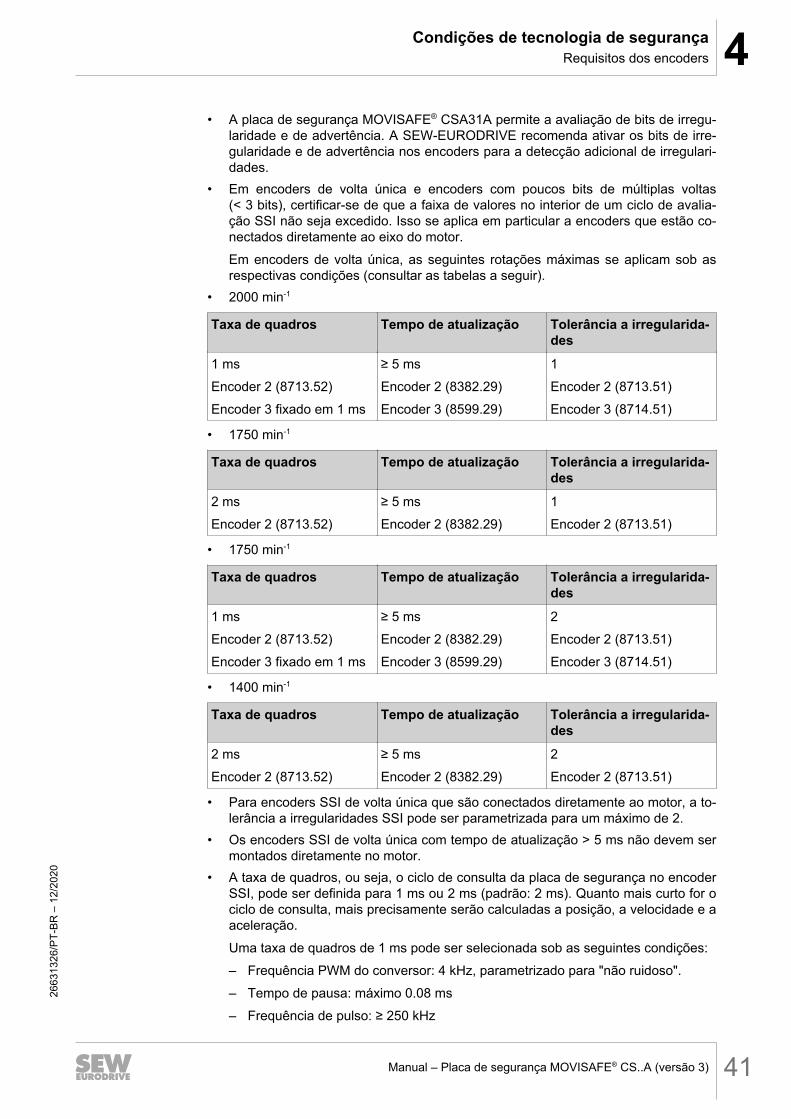
4Condições de tecnologia de segurançaRequisitos dos encoders
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 41
• A placa de segurança MOVISAFE® CSA31A permite a avaliação de bits de irregu-laridade e de advertência. A SEW‑EURODRIVE recomenda ativar os bits de irre-gularidade e de advertência nos encoders para a detecção adicional de irregulari-dades.
• Em encoders de volta única e encoders com poucos bits de múltiplas voltas(< 3 bits), certificar-se de que a faixa de valores no interior de um ciclo de avalia-ção SSI não seja excedido. Isso se aplica em particular a encoders que estão co-nectados diretamente ao eixo do motor.Em encoders de volta única, as seguintes rotações máximas se aplicam sob asrespectivas condições (consultar as tabelas a seguir).
• 2000 min-1
Taxa de quadros Tempo de atualização Tolerância a irregularida-des
1 msEncoder 2 (8713.52)Encoder 3 fixado em 1 ms
≥ 5 msEncoder 2 (8382.29)Encoder 3 (8599.29)
1Encoder 2 (8713.51)Encoder 3 (8714.51)
• 1750 min-1
Taxa de quadros Tempo de atualização Tolerância a irregularida-des
2 msEncoder 2 (8713.52)
≥ 5 msEncoder 2 (8382.29)
1Encoder 2 (8713.51)
• 1750 min-1
Taxa de quadros Tempo de atualização Tolerância a irregularida-des
1 msEncoder 2 (8713.52)Encoder 3 fixado em 1 ms
≥ 5 msEncoder 2 (8382.29)Encoder 3 (8599.29)
2Encoder 2 (8713.51)Encoder 3 (8714.51)
• 1400 min-1
Taxa de quadros Tempo de atualização Tolerância a irregularida-des
2 msEncoder 2 (8713.52)
≥ 5 msEncoder 2 (8382.29)
2Encoder 2 (8713.51)
• Para encoders SSI de volta única que são conectados diretamente ao motor, a to-lerância a irregularidades SSI pode ser parametrizada para um máximo de 2.
• Os encoders SSI de volta única com tempo de atualização > 5 ms não devem sermontados diretamente no motor.
• A taxa de quadros, ou seja, o ciclo de consulta da placa de segurança no encoderSSI, pode ser definida para 1 ms ou 2 ms (padrão: 2 ms). Quanto mais curto for ociclo de consulta, mais precisamente serão calculadas a posição, a velocidade e aaceleração.Uma taxa de quadros de 1 ms pode ser selecionada sob as seguintes condições:– Frequência PWM do conversor: 4 kHz, parametrizado para "não ruidoso".– Tempo de pausa: máximo 0.08 ms– Frequência de pulso: ≥ 250 kHz
2663
1326
/PT-
BR –
12/
2020
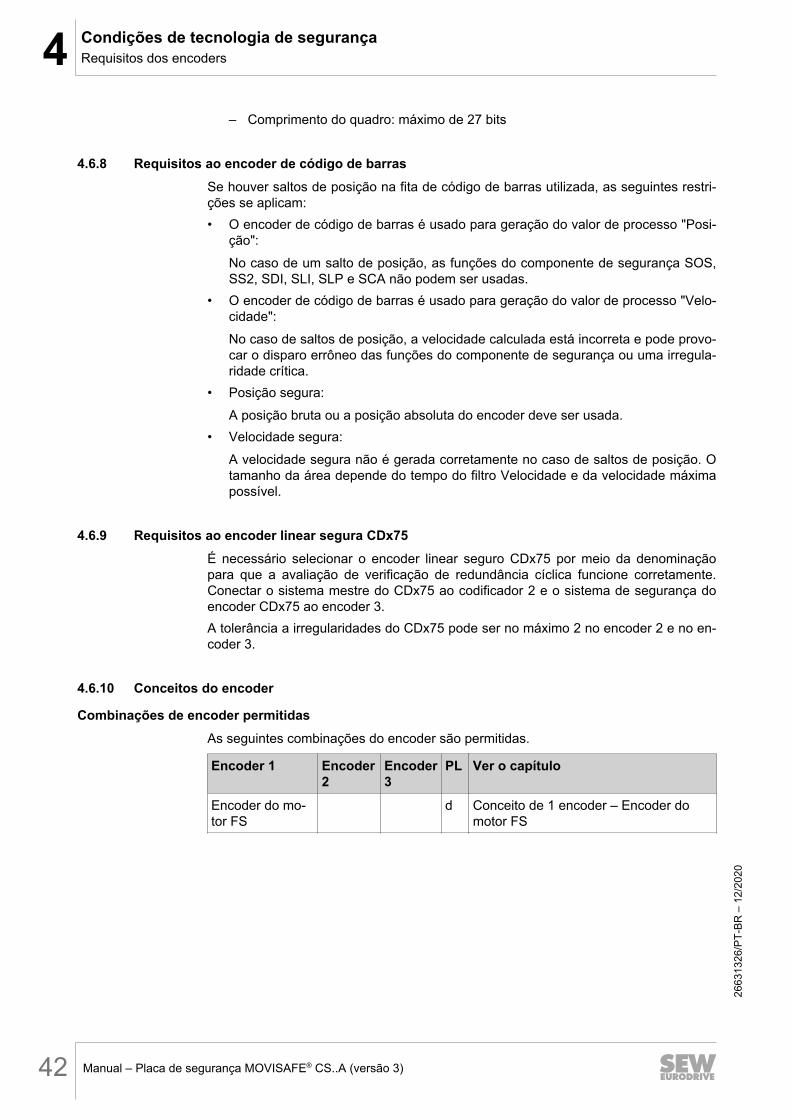
4 Condições de tecnologia de segurançaRequisitos dos encoders
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)42
– Comprimento do quadro: máximo de 27 bits
4.6.8 Requisitos ao encoder de código de barrasSe houver saltos de posição na fita de código de barras utilizada, as seguintes restri-ções se aplicam:• O encoder de código de barras é usado para geração do valor de processo "Posi-
ção":No caso de um salto de posição, as funções do componente de segurança SOS,SS2, SDI, SLI, SLP e SCA não podem ser usadas.
• O encoder de código de barras é usado para geração do valor de processo "Velo-cidade":No caso de saltos de posição, a velocidade calculada está incorreta e pode provo-car o disparo errôneo das funções do componente de segurança ou uma irregula-ridade crítica.
• Posição segura:A posição bruta ou a posição absoluta do encoder deve ser usada.
• Velocidade segura:A velocidade segura não é gerada corretamente no caso de saltos de posição. Otamanho da área depende do tempo do filtro Velocidade e da velocidade máximapossível.
4.6.9 Requisitos ao encoder linear segura CDx75É necessário selecionar o encoder linear seguro CDx75 por meio da denominaçãopara que a avaliação de verificação de redundância cíclica funcione corretamente.Conectar o sistema mestre do CDx75 ao codificador 2 e o sistema de segurança doencoder CDx75 ao encoder 3.A tolerância a irregularidades do CDx75 pode ser no máximo 2 no encoder 2 e no en-coder 3.
4.6.10 Conceitos do encoder
Combinações de encoder permitidasAs seguintes combinações do encoder são permitidas.
Encoder 1 Encoder2
Encoder3
PL Ver o capítulo
Encoder do mo-tor FS
d Conceito de 1 encoder – Encoder domotor FS
2663
1326
/PT-
BR –
12/
2020
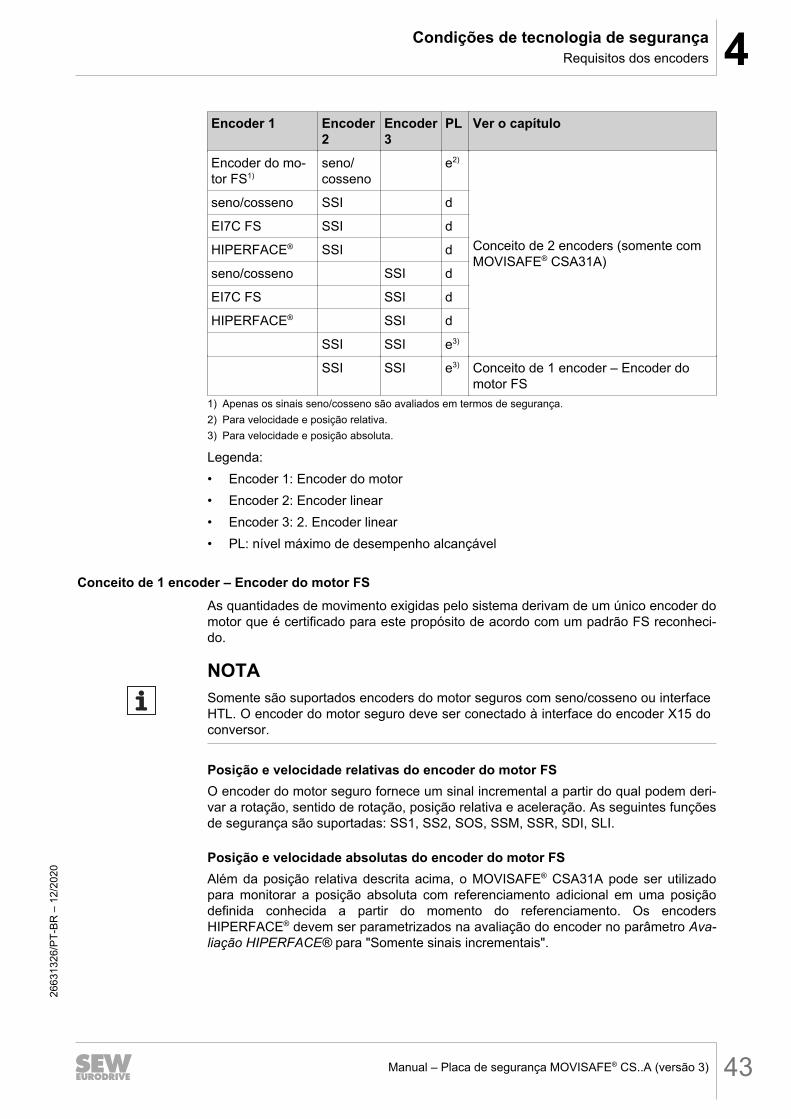
4Condições de tecnologia de segurançaRequisitos dos encoders
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 43
Encoder 1 Encoder2
Encoder3
PL Ver o capítulo
Encoder do mo-tor FS1)
seno/cosseno
e2)
Conceito de 2 encoders (somente comMOVISAFE® CSA31A)
seno/cosseno SSI d
EI7C FS SSI d
HIPERFACE® SSI d
seno/cosseno SSI d
EI7C FS SSI d
HIPERFACE® SSI d
SSI SSI e3)
SSI SSI e3) Conceito de 1 encoder – Encoder domotor FS
1) Apenas os sinais seno/cosseno são avaliados em termos de segurança.2) Para velocidade e posição relativa.3) Para velocidade e posição absoluta.
Legenda:• Encoder 1: Encoder do motor• Encoder 2: Encoder linear• Encoder 3: 2. Encoder linear• PL: nível máximo de desempenho alcançável
Conceito de 1 encoder – Encoder do motor FSAs quantidades de movimento exigidas pelo sistema derivam de um único encoder domotor que é certificado para este propósito de acordo com um padrão FS reconheci-do.
NOTASomente são suportados encoders do motor seguros com seno/cosseno ou interfaceHTL. O encoder do motor seguro deve ser conectado à interface do encoder X15 doconversor.
Posição e velocidade relativas do encoder do motor FSO encoder do motor seguro fornece um sinal incremental a partir do qual podem deri-var a rotação, sentido de rotação, posição relativa e aceleração. As seguintes funçõesde segurança são suportadas: SS1, SS2, SOS, SSM, SSR, SDI, SLI.
Posição e velocidade absolutas do encoder do motor FSAlém da posição relativa descrita acima, o MOVISAFE® CSA31A pode ser utilizadopara monitorar a posição absoluta com referenciamento adicional em uma posiçãodefinida conhecida a partir do momento do referenciamento. Os encodersHIPERFACE® devem ser parametrizados na avaliação do encoder no parâmetro Ava-liação HIPERFACE® para "Somente sinais incrementais".
2663
1326
/PT-
BR –
12/
2020
4 Condições de tecnologia de segurançaRequisitos dos encoders
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)44
NOTADepois de ligar a fonte de alimentação e em caso de irregularidade do encoder, aplaca de segurança deve ser referenciada novamente.
O referenciamento define o ponto de referência para a posição absoluta e, portanto,faz parte da cadeia de segurança. Os componentes envolvidos no referenciamento,por ex., chaves de referência, devem corresponder ao nível de segurança PL r ou SILexigido para a função de segurança (SLP, SCA).
Conceito de 2 encoders (somente com MOVISAFE® CSA31A)As quantidades de movimento exigidas pelo sistema derivam de 2 encoders indepen-dentes não seguros que estão conectados ao mesmo conjunto de acionamento.Os encoders seno/cosseno e HIPERFACE® podem ser usados para o encoder domotor e conectados no conversor ao X15.Os encoders seno/cosseno e HIPERFACE®, bem como encoders SSI e encoderscom sinais seno/cosseno e SSI podem ser usados como encoders lineares e conec-tados ao X17 da placa de segurança. Nos encoders HIPERFACE®, somente os sinaisseno/cosseno são avaliados.A posição HIPERFACE® do encoder do motor pode ser usada para a posição segurae a posição de um encoder SSI por meio de um encoder linear.O usuário é responsável pela adequação e uso do sistema de encoder no contexto dofuncionamento seguro. O usuário deve garantir que os requisitos para o nível de se-gurança PLr ou SIL exigido sejam cumpridos de acordo com as normas relevantes,como EN ISO 13849 e EN 62061.Se um sistema de encoder de 2 canais for configurado com encoders não relevantesà segurança, pode ser alcançado PL d de acordo com DIN EN ISO 13849 e SIL 2 deacordo com DIN EN 61508. Para tal, deve-se comprovar que os encoders tenham es-trutura tecnologicamente distinta. Ambos os encoders podem ser considerados comotecnologicamente distintos se um dos seguintes requisitos for atendido:1. No primeiro encoder, há um software integrado. O segundo encoder foi concebido
inteiramente em hardware sem software integrado.2. Ambos os encoders usam diversos software integrados, por ex., sistemas de ope-
ração diferentes no mesmo hardware ou em hardware diferente.3. Ambos os encoders usam hardware diferente. Presume-se que a programação do
software integrado correspondente ocorreu em um ambiente de desenvolvimentodiferente.
A demanda por diversidade é uma parte fundamental dessa consideração. Uma avali-ação vaga dessa diversidade não é permitida. Deve ser claramente demonstrável queum dos requisitos mencionados é cumprido pela combinação do encoder.Além disso, a não dependência dos encoders utilizados também deve ser garantidaem relação à sua fixação e padrão de medição. Uma irregularidade, por ex., a rupturade um eixo, não deve afetar a identificação da posição e da rotação dos encoders en-volvidos. A combinação do encoder deve ser operada dentro de suas condições am-bientais especificadas (por ex., clima, EMC, poluição, vibração). Falhas de causa co-mum podem ser evitadas selecionando diversos tipos de encoders adequados. Se,apesar da diversidade devido às condições ambientais, ainda existir uma fonte de fa-lhas de causa comum, isso deve ser considerado e as medidas adequadas aplicadas.Os dois encoders são monitorados mutuamente quanto à plausibilidade. Para garantiro funcionamento em termos de tecnologia do sistema do encoder e a disponibilidadedo sistema, o desvio do encoder não deve exceder um valor de tolerância parametri-zado. Isso pode ser obtido por meio de uma estrutura antiderrapante e de folga redu-
2663
1326
/PT-
BR –
12/
2020
4Condições de tecnologia de segurançaRequisitos dos encoders
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 45
zida. Como alternativa, o ajuste de escorregamento integrado no MOVISAFECSA31A pode ser utilizado em sistemas com escorregamento (ver capítulo "FunçãoAjuste de escorregamento"). Os encoders da unidade básica devem ser configuradosno conjunto de acionamento de forma que resulte o mesmo sentido de contagem efe-tivo para todos os encoders avaliados, levando em consideração o sentido de conta-gem do encoder configurado e a inversão do sentido de rotação.
Posição e rotação relativasDois encoders incrementais estão fixados no conjunto de acionamento, os quais sãoconectados às interfaces do encoder 1 e do encoder 2 do conversor. Os encoderssão avaliados em paralelo pelo conversor e pela placa de segurança.A rotação, sentido de rotação, posição relativa e aceleração podem derivar de cadaum dos sinais incrementais do encoder, que são então combinados em valores deprocesso comuns após a escala apropriada.
Posição absoluta e rotação de dois encoders incrementaisDois encoders incrementais estão fixados no conjunto de acionamento, os quais sãoconectados às interfaces do encoder 1 e do encoder 2 do conversor.O referenciamento é realizado conforme descrito no capítulo "Conceito de 1 encoder -Encoder do motor FS". Utiliza-se uma chave de referência redundante que é excedidadurante o referenciamento controlado pelo conversor. Ambos os encoders são refe-renciados simultaneamente, adotando o valor parametrizado da posição de referênciapara ambos os contadores de posição.
Posição absoluta e rotação de dois encoders absolutosDois encoders absolutos estão fixados no conjunto de acionamento, os quais são co-nectados às interfaces do encoder 1 e do encoder 2 do conversor. Os encoders sãoavaliados em paralelo pelo conversor e pela placa de segurança.As posições absolutas em relação à aplicação são acessadas a partir de ambos osencoders absolutos, que são então combinados em um valor de processo comumapós a escala apropriada.Ambos os encoders são usados para determinar a velocidade. Os sinais de cada en-coder são usados para gerar um valor de velocidade, a direção de movimento e umvalor de aceleração que são combinados para formar valores de processo comunsapós a escala apropriada.Se o encoder 1 tiver uma parte seno/cosseno relacionada à segurança, esta somentepode ser usada para determinar a velocidade.
Posição absoluta de um encoder incremental e um encoder absolutoUm encoder incremental e um encoder absoluto estão fixados no conjunto de aciona-mento, os quais estão conectados às interfaces do encoder 1 e do encoder 2 do con-versor. Ambos os encoders são avaliados em paralelo pelo conversor e pela placa desegurança.Quando o sistema é ligado, somente o encoder absoluto fornece uma posição absolu-ta, enquanto o encoder incremental ainda não está referenciado. O valor inicial para aposição não é, portanto, redundante. Para obter uma posição absoluta segura, o en-coder incremental deve ser referenciado com uma medida adequada.
2663
1326
/PT-
BR –
12/
2020

4 Condições de tecnologia de segurançaRequisitos dos encoders
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)46
Conceito de 2 encoders – 2 encoders lineares (somente com MOVISAFE® CSA31A)Dois encoders absolutos estão fixados no conjunto de acionamento, os quais são co-nectados às interfaces do encoder 2 e do encoder 3 do conversor. O encoder 2 é ava-liado em paralelo pelo conversor e pela placa de segurança. O encoder 3 é avaliadoexclusivamente pela placa de segurança. Ao ligar, os dois encoders absolutos forne-cem um valor de posição para que nenhum referenciamento seja necessário após aligação. Durante a colocação em operação, a referência para a posição da aplicaçãodeve ser estabelecida uma vez para cada encoder absoluto.Tanto o valor de processo "Posição" quanto o valor de processo "Velocidade" são ge-rados a partir dos dois encoders. Como alternativa, um encoder do motor FS ou umencoder do motor padrão pode ser conectado ao encoder 1 e avaliado para o valor deprocesso "Velocidade" (consultar o capítulo "Conceito de 1 encoder – Encoder do mo-tor FS" e "conceito de 2 encoders").O usuário é responsável pela adequação e uso do sistema de encoder no contexto dofuncionamento seguro. O usuário deve garantir que os requisitos para o nível de se-gurança PLr ou SIL exigido sejam cumpridos de acordo com as normas relevantes,como EN ISO 13849 e EN 62061.
Conceito de 1 encoder – Encoders lineares FS (somente com MOVISAFE® CSA31A)As quantidades de movimento exigidas pelo sistema derivam de um único encoder li-near que está certificado para este propósito de acordo com um padrão FS reconheci-do.O conceito de encoder pode ser usado para aplicações antideslizantes, sujeitas a es-corregamento e não lineares.
Encoder SSI duplo seguroUm encoder SSI duplo funcionalmente seguro, que possui 2 interfaces SSI separa-das, está conectado ao trajeto. Ambas as interfaces estão conectadas à interface doencoder da placa de segurança através da caixa de combinação SSI UEA31A ou deum cabo adequado.O encoder tem uma estrutura interna funcionalmente seguro e fornece uma posiçãoabsoluta. Esta é enviada separadamente para avaliação por meio de ambas as inter-faces SSI.O encoder pode ser rotativo ou linear. A conexão entre o encoder e a aplicação deveser à prova de falhas e sem escorregamento.Os encoders requerem diagnósticos adicionais, que estão descritos no capítulo sobreo respectivo encoder. Todos os diagnósticos para encoders únicos SSI permanecemativos.O encoder absoluto é configurado como encoder 2 e encoder 3 no conjunto de acio-namento. O encoder 2 é avaliado em paralelo pelo conversor e pela placa de segu-rança, o encoder 3 é avaliado exclusivamente pela placa de segurança.Para encoders SSI duplos seguros, não há restrições gerais em relação às funçõesdo componente de segurança. No caso de uso planejado, deve-se verificar se a reso-lução e a precisão são suficientes para obter valores adequados de posição, velocida-de e aceleração.
2663
1326
/PT-
BR –
12/
2020
4Condições de tecnologia de segurançaRequisitos à operação
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 47
4.7 Requisitos à operaçãoA operação só pode ser realizada dentro dos limites especificados na documentaçãoassociada. Isso se aplica tanto à placa de segurança MOVISAFE® CS..A quanto àsunidades conectados à mesma.
4.8 AprovaçãoO fabricante do sistema deve realizar uma inspeção completa para determinar a se-gurança de uma máquina ou sistema. A eficácia de qualquer redução de riscos deveser avaliada. Também deve ser verificado se a integridade de segurança necessária(SIL e/ou PL) é atingida para cada função de segurança implementada.Para comprovar a integridade de segurança atingida, por exemplo, pode ser utilizadaa ferramenta de cálculo "SISTEMA" do Instituto de Proteção no Trabalho da Compa-nhia Estatal de Seguro de Acidentes ("Institut für Arbeitsschutz der Deutschen Ge-setzlichen Unfallversicherung", IFA).
2663
1326
/PT-
BR –
12/
2020
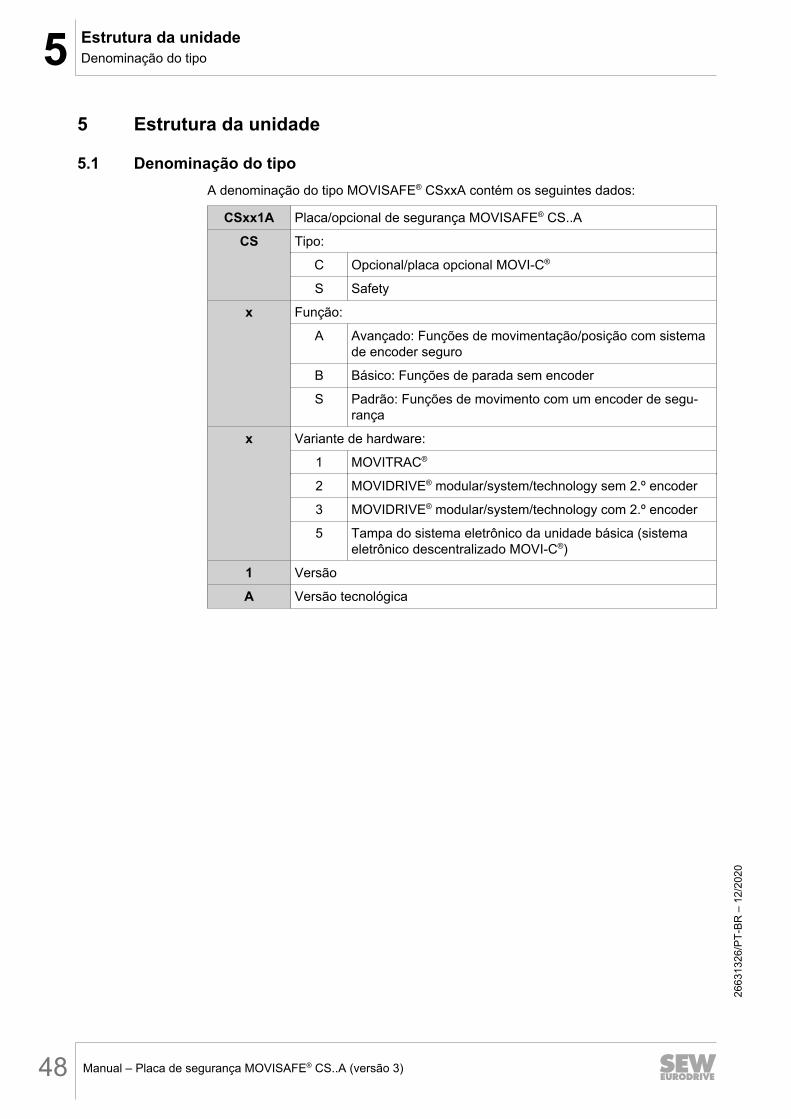
5 Estrutura da unidadeDenominação do tipo
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)48
5 Estrutura da unidade
5.1 Denominação do tipoA denominação do tipo MOVISAFE® CSxxA contém os seguintes dados:
CSxx1A Placa/opcional de segurança MOVISAFE® CS..A
CS Tipo:
C Opcional/placa opcional MOVI-C®
S Safety
x Função:
A Avançado: Funções de movimentação/posição com sistemade encoder seguro
B Básico: Funções de parada sem encoder
S Padrão: Funções de movimento com um encoder de segu-rança
x Variante de hardware:
1 MOVITRAC®
2 MOVIDRIVE® modular/system/technology sem 2.º encoder
3 MOVIDRIVE® modular/system/technology com 2.º encoder
5 Tampa do sistema eletrônico da unidade básica (sistemaeletrônico descentralizado MOVI‑C®)
1 Versão
A Versão tecnológica
2663
1326
/PT-
BR –
12/
2020
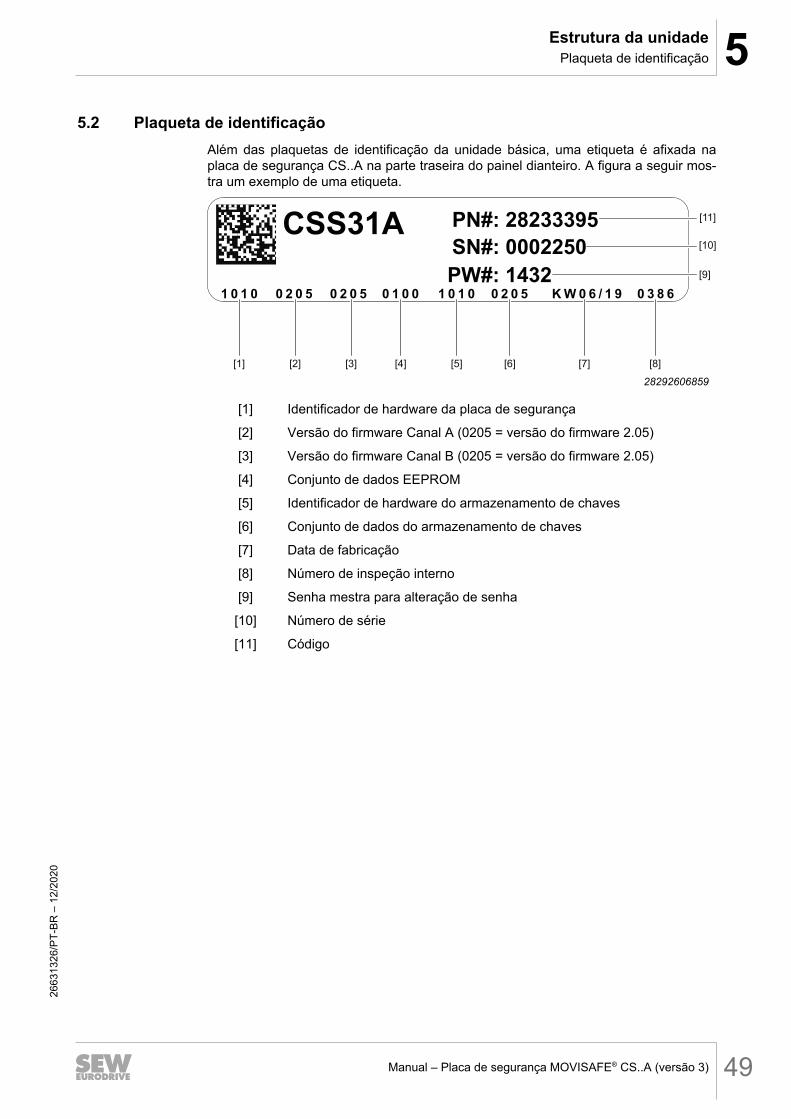
5Estrutura da unidadePlaqueta de identificação
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 49
5.2 Plaqueta de identificaçãoAlém das plaquetas de identificação da unidade básica, uma etiqueta é afixada naplaca de segurança CS..A na parte traseira do painel dianteiro. A figura a seguir mos-tra um exemplo de uma etiqueta.
CSS31A PN#: 28233395
SN#: 0002250
PW#: 14321 0 1 0 0 2 0 5 0 2 0 5 0 2 0 5 K W 0 6 / 1 9 0 3 8 60 1 0 0 1 0 1 0
[1] [2] [3] [4] [5] [6] [7] [8]
[9]
[10]
[11]
28292606859
[1] Identificador de hardware da placa de segurança
[2] Versão do firmware Canal A (0205 = versão do firmware 2.05)
[3] Versão do firmware Canal B (0205 = versão do firmware 2.05)
[4] Conjunto de dados EEPROM
[5] Identificador de hardware do armazenamento de chaves
[6] Conjunto de dados do armazenamento de chaves
[7] Data de fabricação
[8] Número de inspeção interno
[9] Senha mestra para alteração de senha
[10] Número de série
[11] Código
2663
1326
/PT-
BR –
12/
2020

5 Estrutura da unidadeEscopo de fornecimento
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)50
5.3 Escopo de fornecimento• MOVISAFE® CS..A:
– Placa opcional com bornes elásticos inseríveis no X60.– Armazenamento de chaves
5.3.1 Escopo de fornecimento opcional
Caixa de combinação SSI UEA31A• Código Caixa de combinação SSI UEA31A: 28269667• A caixa de combinação SSI UEA31A é usada para conexão de 2 encoders linea-
res SSI à placa de segurança CSA31A. Além disso, caso o consumo de correntedos dois encoders SSI exceda um total de 500 mA, uma tensão de alimentaçãodo encoder externo de 24 VCC pode ser conectada.
[1]
[2] [3] [4]
32412351499
[1] X65: Conexão da tensão de alimentação do encoder externo 24 VCC[2] X17: Conexão ao X17 da placa de segurança CSA31A[3] X18: Conexão do encoder 2[4] X19: Conexão do encoder 3
• Somente o cabo de conexão pré-fabricado da SEW‑EURODRIVE é permitido paraconexão da caixa de combinação SSI UEA31A à interface de encoder X17 da pla-ca de segurança CSA31A. O comprimento do cabo de conexão pode ser configu-rado de 0.5 m até 6 m.– Código Cabo de conexão: 28128907
2663
1326
/PT-
BR –
12/
2020
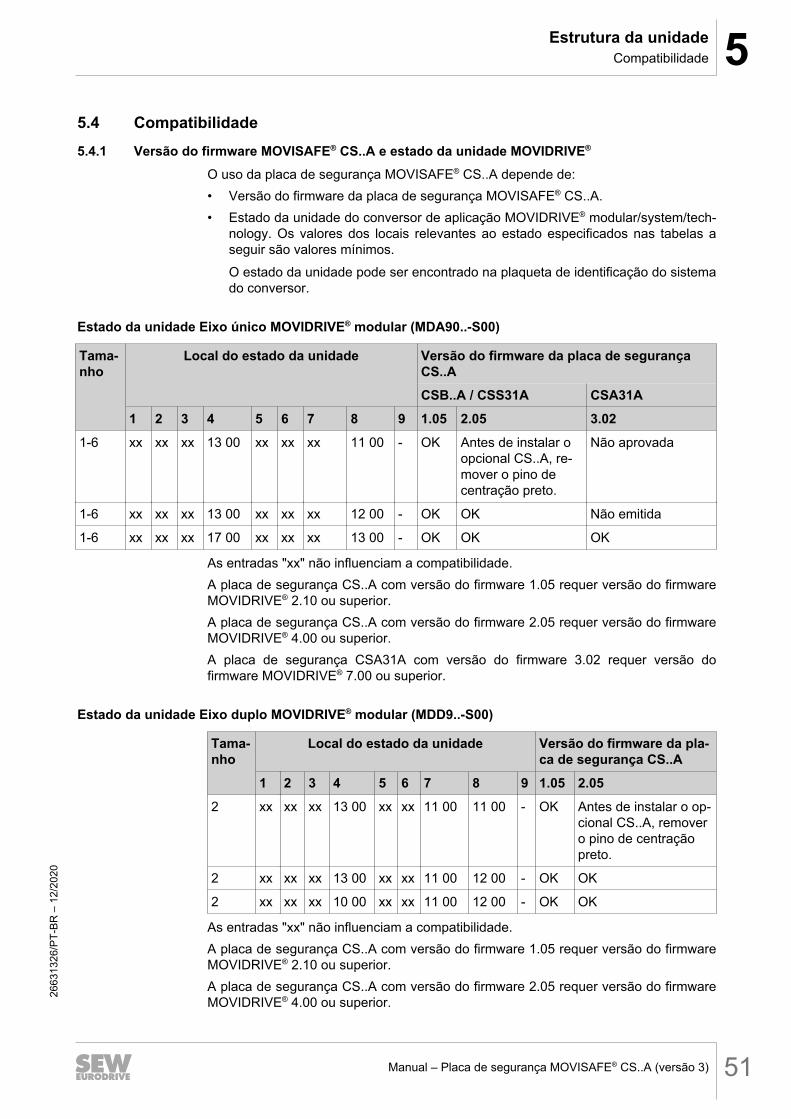
5Estrutura da unidadeCompatibilidade
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 51
5.4 Compatibilidade5.4.1 Versão do firmware MOVISAFE® CS..A e estado da unidade MOVIDRIVE®
O uso da placa de segurança MOVISAFE® CS..A depende de:• Versão do firmware da placa de segurança MOVISAFE® CS..A.• Estado da unidade do conversor de aplicação MOVIDRIVE® modular/system/tech-
nology. Os valores dos locais relevantes ao estado especificados nas tabelas aseguir são valores mínimos.O estado da unidade pode ser encontrado na plaqueta de identificação do sistemado conversor.
Estado da unidade Eixo único MOVIDRIVE® modular (MDA90..-S00)
Tama-nho
Local do estado da unidade Versão do firmware da placa de segurançaCS..ACSB..A / CSS31A CSA31A
1 2 3 4 5 6 7 8 9 1.05 2.05 3.021-6 xx xx xx 13 00 xx xx xx 11 00 - OK Antes de instalar o
opcional CS..A, re-mover o pino decentração preto.
Não aprovada
1-6 xx xx xx 13 00 xx xx xx 12 00 - OK OK Não emitida
1-6 xx xx xx 17 00 xx xx xx 13 00 - OK OK OK
As entradas "xx" não influenciam a compatibilidade.A placa de segurança CS..A com versão do firmware 1.05 requer versão do firmwareMOVIDRIVE® 2.10 ou superior.A placa de segurança CS..A com versão do firmware 2.05 requer versão do firmwareMOVIDRIVE® 4.00 ou superior.A placa de segurança CSA31A com versão do firmware 3.02 requer versão dofirmware MOVIDRIVE® 7.00 ou superior.
Estado da unidade Eixo duplo MOVIDRIVE® modular (MDD9..-S00)
Tama-nho
Local do estado da unidade Versão do firmware da pla-ca de segurança CS..A
1 2 3 4 5 6 7 8 9 1.05 2.052 xx xx xx 13 00 xx xx 11 00 11 00 - OK Antes de instalar o op-
cional CS..A, removero pino de centraçãopreto.
2 xx xx xx 13 00 xx xx 11 00 12 00 - OK OK
2 xx xx xx 10 00 xx xx 11 00 12 00 - OK OK
As entradas "xx" não influenciam a compatibilidade.A placa de segurança CS..A com versão do firmware 1.05 requer versão do firmwareMOVIDRIVE® 2.10 ou superior.A placa de segurança CS..A com versão do firmware 2.05 requer versão do firmwareMOVIDRIVE® 4.00 ou superior.
2663
1326
/PT-
BR –
12/
2020
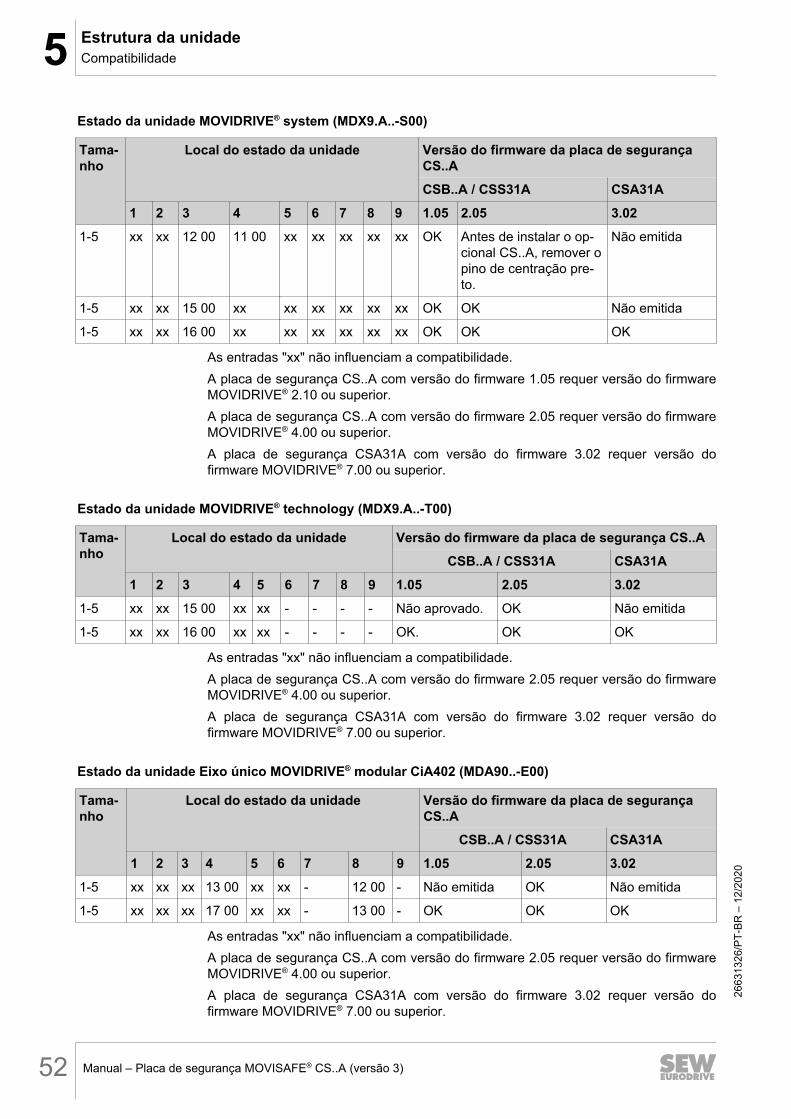
5 Estrutura da unidadeCompatibilidade
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)52
Estado da unidade MOVIDRIVE® system (MDX9.A..-S00)
Tama-nho
Local do estado da unidade Versão do firmware da placa de segurançaCS..ACSB..A / CSS31A CSA31A
1 2 3 4 5 6 7 8 9 1.05 2.05 3.021-5 xx xx 12 00 11 00 xx xx xx xx xx OK Antes de instalar o op-
cional CS..A, remover opino de centração pre-to.
Não emitida
1-5 xx xx 15 00 xx xx xx xx xx xx OK OK Não emitida
1-5 xx xx 16 00 xx xx xx xx xx xx OK OK OK
As entradas "xx" não influenciam a compatibilidade.A placa de segurança CS..A com versão do firmware 1.05 requer versão do firmwareMOVIDRIVE® 2.10 ou superior.A placa de segurança CS..A com versão do firmware 2.05 requer versão do firmwareMOVIDRIVE® 4.00 ou superior.A placa de segurança CSA31A com versão do firmware 3.02 requer versão dofirmware MOVIDRIVE® 7.00 ou superior.
Estado da unidade MOVIDRIVE® technology (MDX9.A..-T00)
Tama-nho
Local do estado da unidade Versão do firmware da placa de segurança CS..ACSB..A / CSS31A CSA31A
1 2 3 4 5 6 7 8 9 1.05 2.05 3.021-5 xx xx 15 00 xx xx - - - - Não aprovado. OK Não emitida
1-5 xx xx 16 00 xx xx - - - - OK. OK OK
As entradas "xx" não influenciam a compatibilidade.A placa de segurança CS..A com versão do firmware 2.05 requer versão do firmwareMOVIDRIVE® 4.00 ou superior.A placa de segurança CSA31A com versão do firmware 3.02 requer versão dofirmware MOVIDRIVE® 7.00 ou superior.
Estado da unidade Eixo único MOVIDRIVE® modular CiA402 (MDA90..-E00)
Tama-nho
Local do estado da unidade Versão do firmware da placa de segurançaCS..A
CSB..A / CSS31A CSA31A1 2 3 4 5 6 7 8 9 1.05 2.05 3.02
1-5 xx xx xx 13 00 xx xx - 12 00 - Não emitida OK Não emitida
1-5 xx xx xx 17 00 xx xx - 13 00 - OK OK OK
As entradas "xx" não influenciam a compatibilidade.A placa de segurança CS..A com versão do firmware 2.05 requer versão do firmwareMOVIDRIVE® 4.00 ou superior.A placa de segurança CSA31A com versão do firmware 3.02 requer versão dofirmware MOVIDRIVE® 7.00 ou superior.
2663
1326
/PT-
BR –
12/
2020
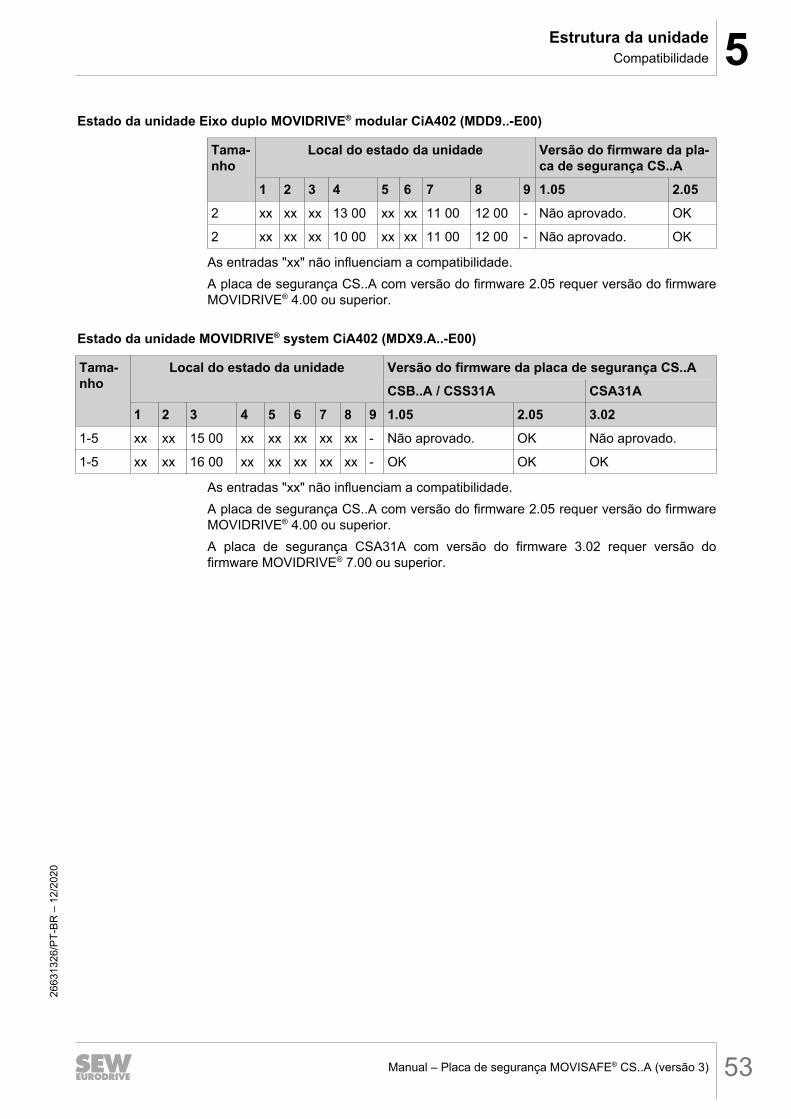
5Estrutura da unidadeCompatibilidade
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 53
Estado da unidade Eixo duplo MOVIDRIVE® modular CiA402 (MDD9..-E00)
Tama-nho
Local do estado da unidade Versão do firmware da pla-ca de segurança CS..A
1 2 3 4 5 6 7 8 9 1.05 2.052 xx xx xx 13 00 xx xx 11 00 12 00 - Não aprovado. OK
2 xx xx xx 10 00 xx xx 11 00 12 00 - Não aprovado. OK
As entradas "xx" não influenciam a compatibilidade.A placa de segurança CS..A com versão do firmware 2.05 requer versão do firmwareMOVIDRIVE® 4.00 ou superior.
Estado da unidade MOVIDRIVE® system CiA402 (MDX9.A..-E00)
Tama-nho
Local do estado da unidade Versão do firmware da placa de segurança CS..ACSB..A / CSS31A CSA31A
1 2 3 4 5 6 7 8 9 1.05 2.05 3.021-5 xx xx 15 00 xx xx xx xx xx - Não aprovado. OK Não aprovado.
1-5 xx xx 16 00 xx xx xx xx xx - OK OK OK
As entradas "xx" não influenciam a compatibilidade.A placa de segurança CS..A com versão do firmware 2.05 requer versão do firmwareMOVIDRIVE® 4.00 ou superior.A placa de segurança CSA31A com versão do firmware 3.02 requer versão dofirmware MOVIDRIVE® 7.00 ou superior.
2663
1326
/PT-
BR –
12/
2020
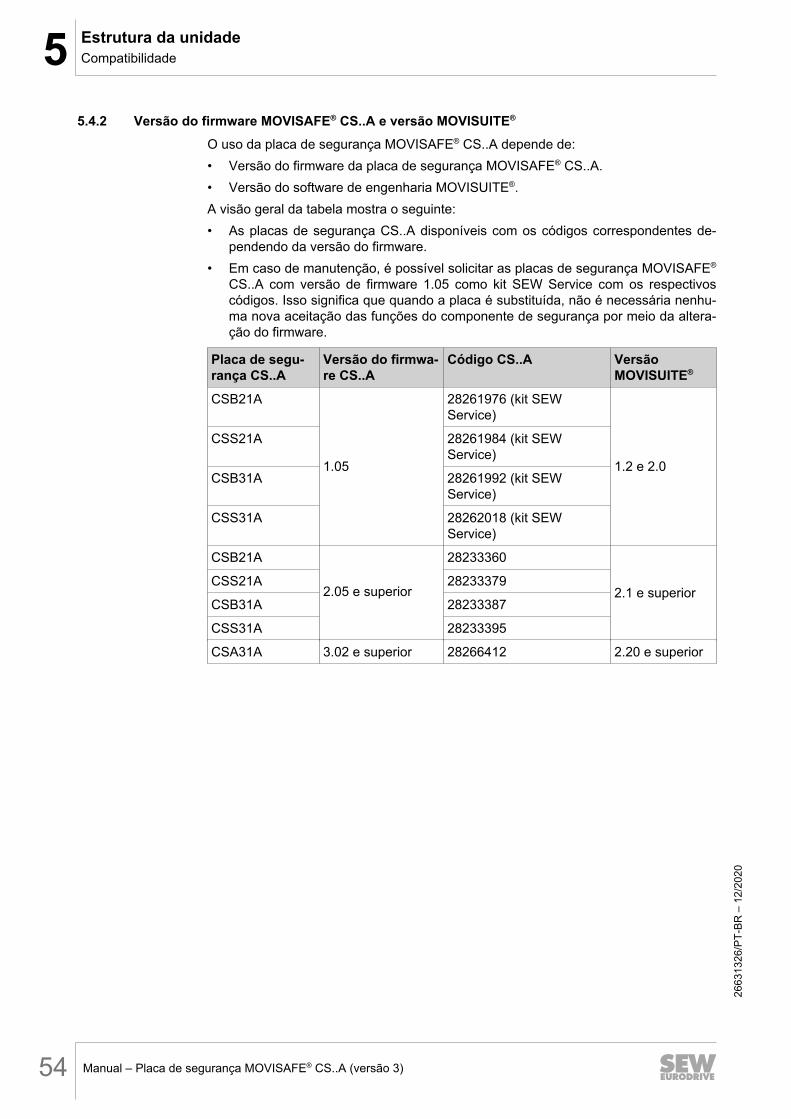
5 Estrutura da unidadeCompatibilidade
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)54
5.4.2 Versão do firmware MOVISAFE® CS..A e versão MOVISUITE®
O uso da placa de segurança MOVISAFE® CS..A depende de:• Versão do firmware da placa de segurança MOVISAFE® CS..A.• Versão do software de engenharia MOVISUITE®.A visão geral da tabela mostra o seguinte:• As placas de segurança CS..A disponíveis com os códigos correspondentes de-
pendendo da versão do firmware.• Em caso de manutenção, é possível solicitar as placas de segurança MOVISAFE®
CS..A com versão de firmware 1.05 como kit SEW Service com os respectivoscódigos. Isso significa que quando a placa é substituída, não é necessária nenhu-ma nova aceitação das funções do componente de segurança por meio da altera-ção do firmware.
Placa de segu-rança CS..A
Versão do firmwa-re CS..A
Código CS..A VersãoMOVISUITE®
CSB21A
1.05
28261976 (kit SEWService)
1.2 e 2.0
CSS21A 28261984 (kit SEWService)
CSB31A 28261992 (kit SEWService)
CSS31A 28262018 (kit SEWService)
CSB21A
2.05 e superior
28233360
2.1 e superiorCSS21A 28233379
CSB31A 28233387
CSS31A 28233395
CSA31A 3.02 e superior 28266412 2.20 e superior
2663
1326
/PT-
BR –
12/
2020
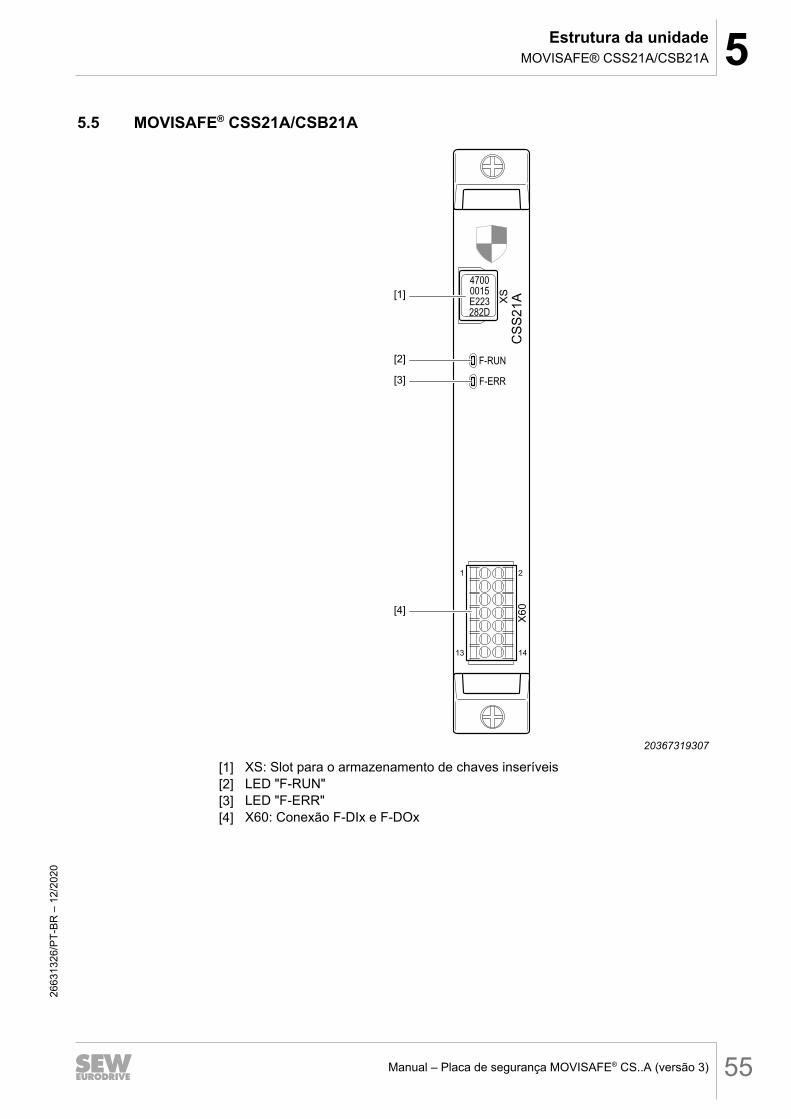
5Estrutura da unidadeMOVISAFE® CSS21A/CSB21A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 55
5.5 MOVISAFE® CSS21A/CSB21AMOVISAFE® CSS21A/CSB21A
4700
0015
E223
282D
XS
X60
CSS21A
F-RUN
F-ERR
1413
1 2
[1]
[2]
[3]
[4]
20367319307
[1] XS: Slot para o armazenamento de chaves inseríveis[2] LED "F-RUN"[3] LED "F-ERR"[4] X60: Conexão F-DIx e F-DOx
2663
1326
/PT-
BR –
12/
2020
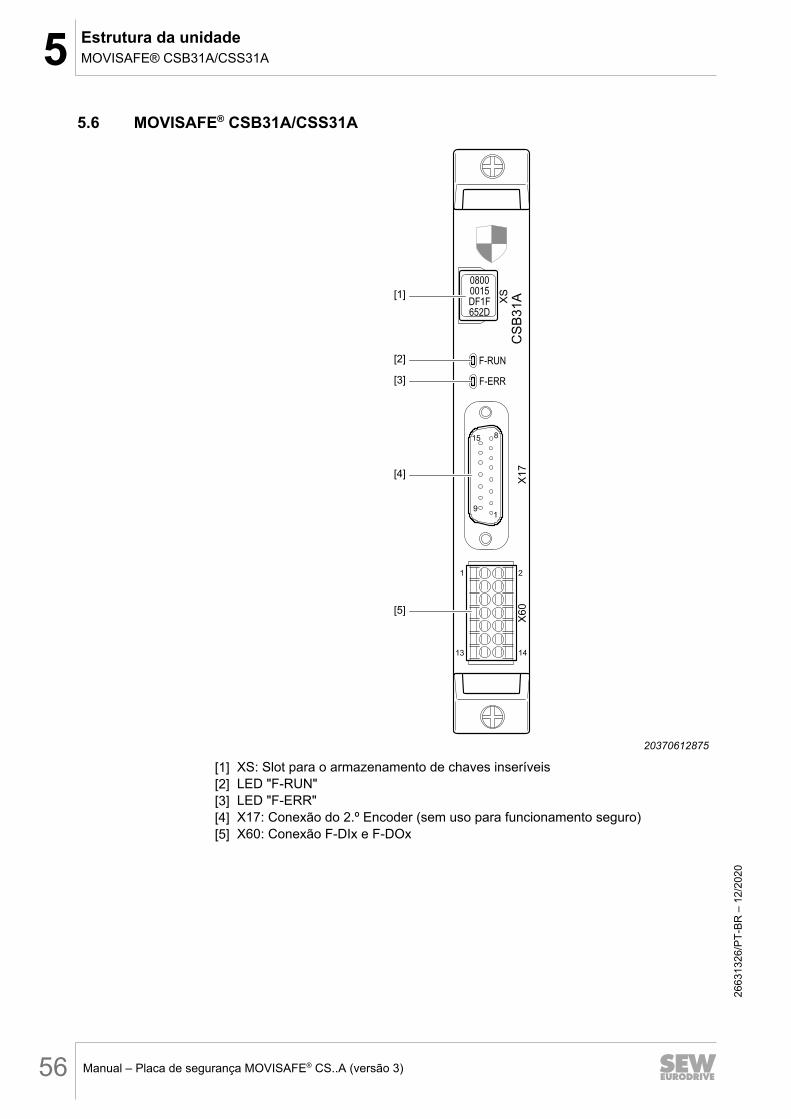
5 Estrutura da unidadeMOVISAFE® CSB31A/CSS31A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)56
5.6 MOVISAFE® CSB31A/CSS31AMOVISAFE® CSB31A/CSS31A
0800
0015
DF1F
652D
XS
X60
X17
CSB31A
F-RUN
F-ERR
19
815
1413
1 2
[1]
[2]
[3]
[4]
[5]
20370612875
[1] XS: Slot para o armazenamento de chaves inseríveis[2] LED "F-RUN"[3] LED "F-ERR"[4] X17: Conexão do 2.º Encoder (sem uso para funcionamento seguro)[5] X60: Conexão F-DIx e F-DOx
2663
1326
/PT-
BR –
12/
2020
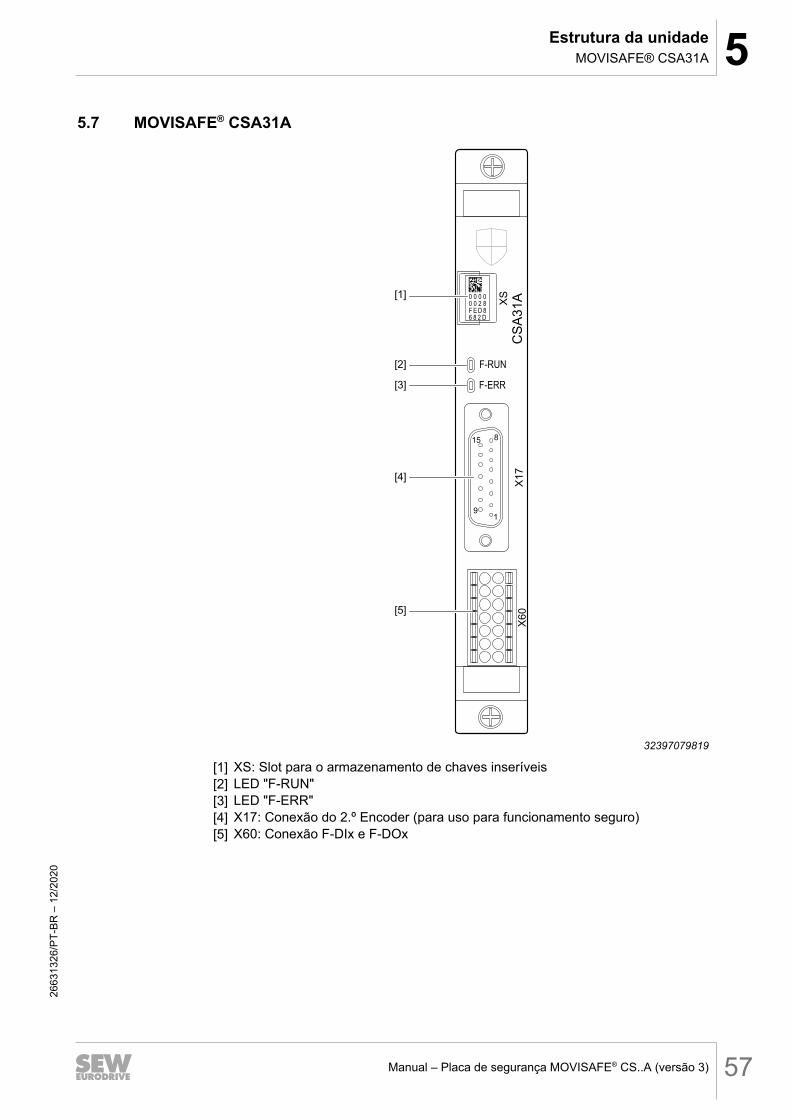
5Estrutura da unidadeMOVISAFE® CSA31A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 57
5.7 MOVISAFE® CSA31AMOVISAFE® CSA31A
0 0 0 0
0 0 2 8
F E D 8
6 8 2 D
[1]
[2]
[3]
[4]
[5]
XS
CSA31A
X60
X17
F-RUN
F-ERR
19
815
32397079819
[1] XS: Slot para o armazenamento de chaves inseríveis[2] LED "F-RUN"[3] LED "F-ERR"[4] X17: Conexão do 2.º Encoder (para uso para funcionamento seguro)[5] X60: Conexão F-DIx e F-DOx
2663
1326
/PT-
BR –
12/
2020
6 Instalação mecânicaAntes de começar
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)58
6 Instalação mecânica
6.1 Antes de começarObservar as seguintes informações antes da instalação ou remoção da placa de se-gurança MOVISAFE® CS..A:• Desligar o conversor da rede de alimentação. Desligar a tensão de 24 VCC e a
tensão de entrada.• Tomar medidas adequadas contra descarga eletrostática (pulseiras antiestáticas,
sapatos condutivos, etc.) antes de tocar na placa opcional.• Antes da instalação da placa opcional, retirar o controle manual e a tampa fron-
tal.• Após a instalação da placa opcional, recolocar a tampa frontal e o controle ma-
nual.• Armazenar a placa opcional em sua embalagem original. Basta remover a placa
opcional da embalagem original imediatamente antes da instalação.• Só tocar na placa opcional pelas bordas. Nunca tocar nas parcelas.
6.2 Montagem da placa de segurança MOVISAFE® CS..AInstalaçãoda placa desegurançaMOVISAFE® CS..A
6.2.1 Conversor de aplicação permitidoA placa de segurança MOVISAFE® CS..A pode ser instalada nos seguintes converso-res de aplicação:
Conversor de aplicação MOVISAFE®
CS.21AMOVISAFE®
CS.31AMOVIDRIVE® modular – Módulo de eixo único MDA Sim Sim
MOVIDRIVE® modular – Módulo de eixo duploMDD90
Sim Não
MOVIDRIVE® modular – Módulo de eixo duploMDD91 (DDI) MOVISAFE® CS.21A1)
Sim Não
MOVIDRIVE® system Sim Sim
MOVIDRIVE® technology Sim Sim1) Somente CSB21A
6.2.2 Montagem no MOVIDRIVE® modularObservar as indicações de segurança no capítulo "Instalação elétrica" nas instruçõesde operação do conversor de aplicação.
NOTAPré-requisitos de instalação.A placa de segurança MOVISAFE® CS..A somente pode ser instalada nos módulosde eixo opcionais.
1. Desligar o conversor de aplicação. Desligar a tensão de 24 VCC e a tensão de en-trada. Remover o conector em ponte X6. 26
6313
26/P
T-BR
– 1
2/20
20
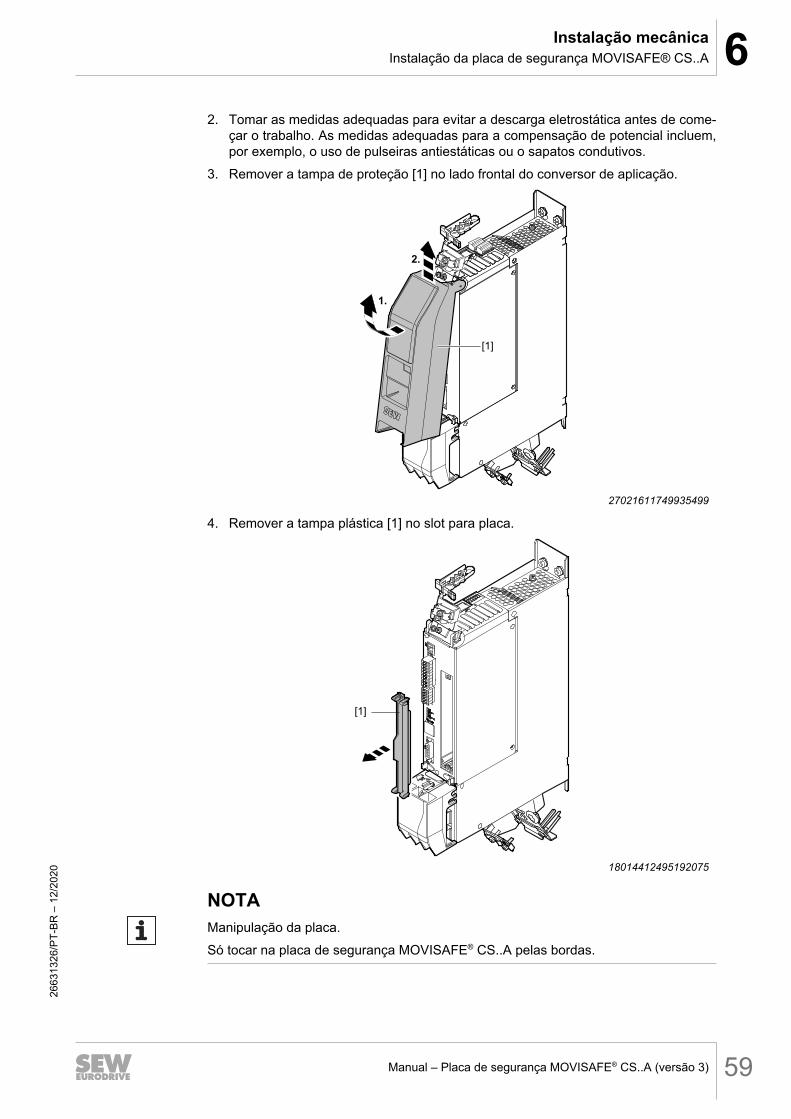
6Instalação mecânicaInstalação da placa de segurança MOVISAFE® CS..A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 59
2. Tomar as medidas adequadas para evitar a descarga eletrostática antes de come-çar o trabalho. As medidas adequadas para a compensação de potencial incluem,por exemplo, o uso de pulseiras antiestáticas ou o sapatos condutivos.
3. Remover a tampa de proteção [1] no lado frontal do conversor de aplicação.
1.
2.
[1]
5
4
3
2
15
4
3
2
1
27021611749935499
4. Remover a tampa plástica [1] no slot para placa.
[1]
18014412495192075
NOTAManipulação da placa.Só tocar na placa de segurança MOVISAFE® CS..A pelas bordas.
2663
1326
/PT-
BR –
12/
2020
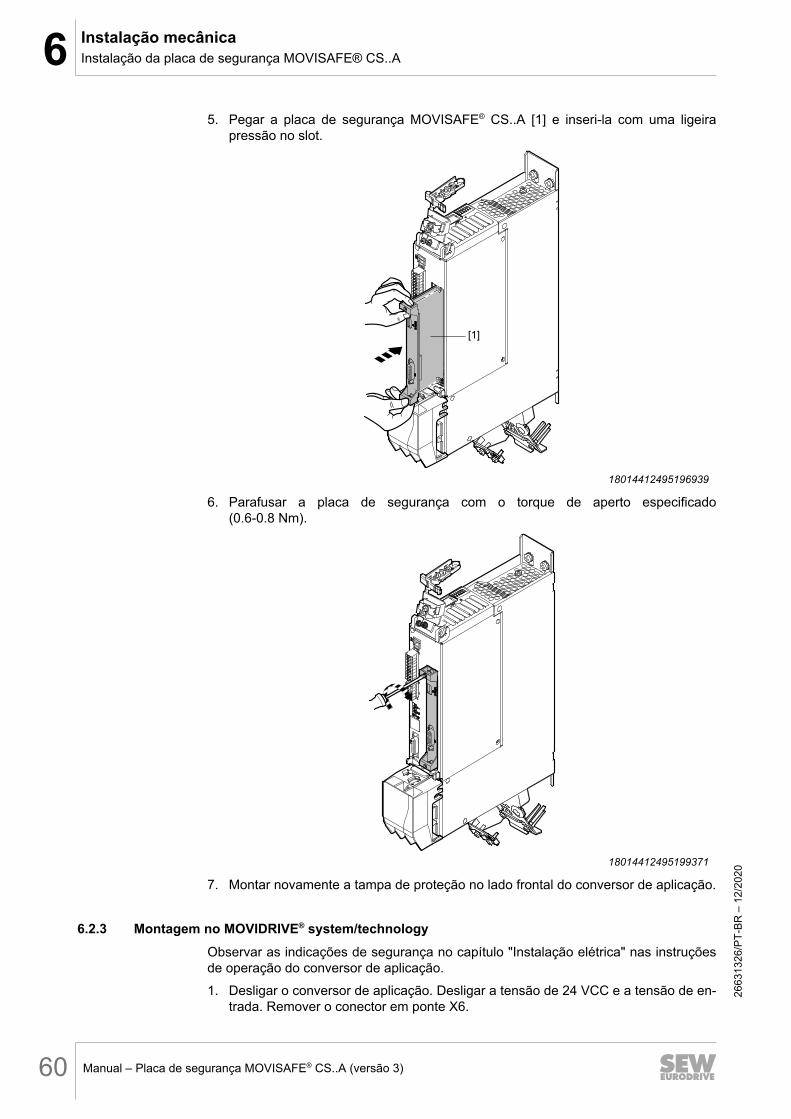
6 Instalação mecânicaInstalação da placa de segurança MOVISAFE® CS..A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)60
5. Pegar a placa de segurança MOVISAFE® CS..A [1] e inseri-la com uma ligeirapressão no slot.
[1]
18014412495196939
6. Parafusar a placa de segurança com o torque de aperto especificado(0.6-0.8 Nm).
18014412495199371
7. Montar novamente a tampa de proteção no lado frontal do conversor de aplicação.
6.2.3 Montagem no MOVIDRIVE® system/technologyObservar as indicações de segurança no capítulo "Instalação elétrica" nas instruçõesde operação do conversor de aplicação.1. Desligar o conversor de aplicação. Desligar a tensão de 24 VCC e a tensão de en-
trada. Remover o conector em ponte X6.
2663
1326
/PT-
BR –
12/
2020
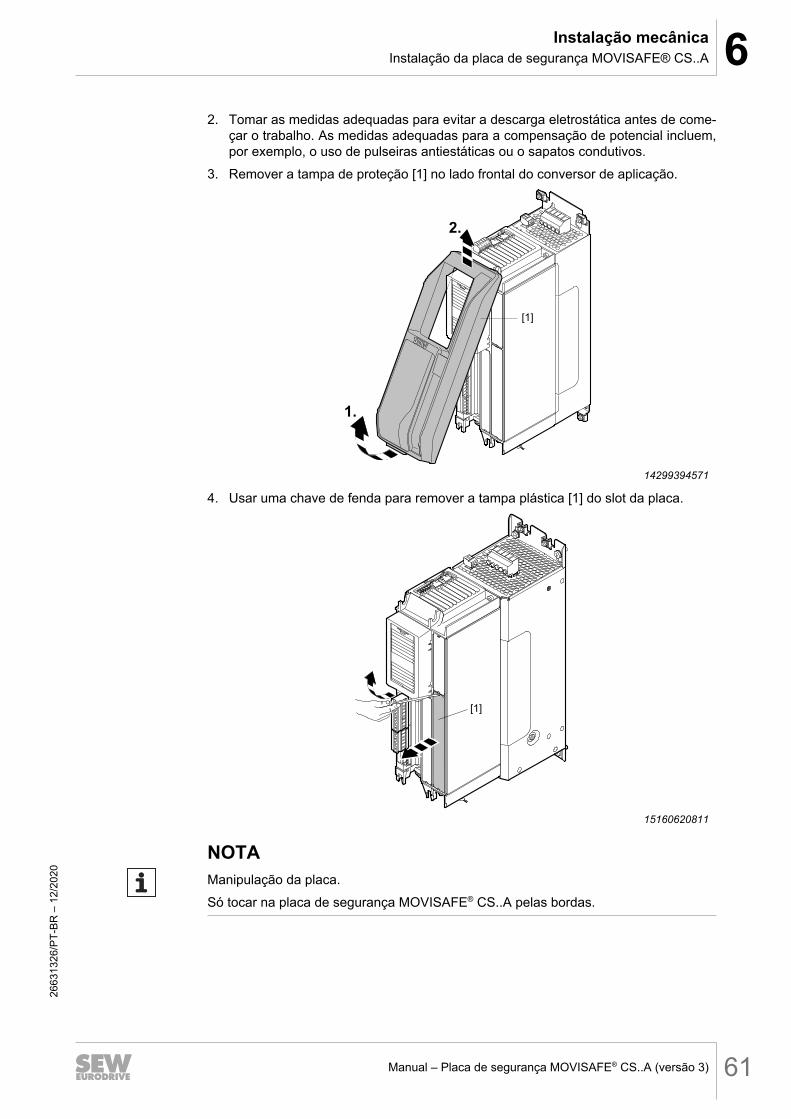
6Instalação mecânicaInstalação da placa de segurança MOVISAFE® CS..A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 61
2. Tomar as medidas adequadas para evitar a descarga eletrostática antes de come-çar o trabalho. As medidas adequadas para a compensação de potencial incluem,por exemplo, o uso de pulseiras antiestáticas ou o sapatos condutivos.
3. Remover a tampa de proteção [1] no lado frontal do conversor de aplicação.
1.
2.
[1]5
4
3
2
1
14299394571
4. Usar uma chave de fenda para remover a tampa plástica [1] do slot da placa.
[1]
15160620811
NOTAManipulação da placa.Só tocar na placa de segurança MOVISAFE® CS..A pelas bordas.
2663
1326
/PT-
BR –
12/
2020
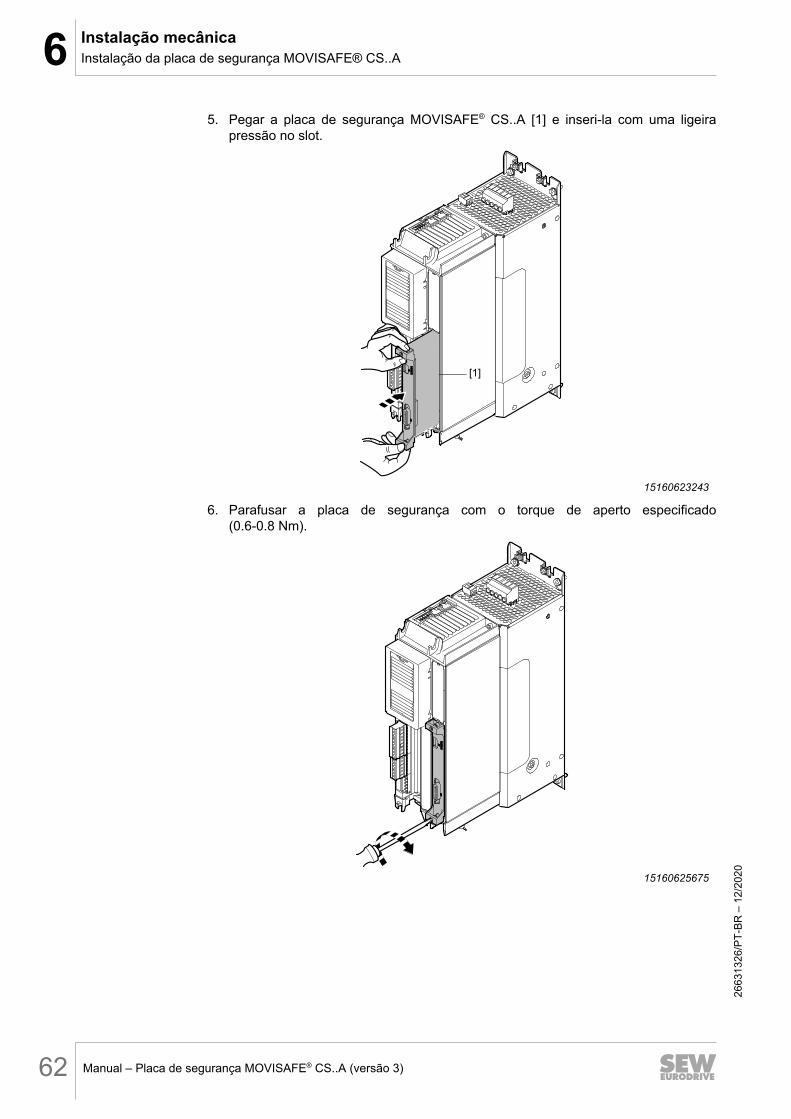
6 Instalação mecânicaInstalação da placa de segurança MOVISAFE® CS..A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)62
5. Pegar a placa de segurança MOVISAFE® CS..A [1] e inseri-la com uma ligeirapressão no slot.
[1]
15160623243
6. Parafusar a placa de segurança com o torque de aperto especificado(0.6-0.8 Nm).
15160625675
2663
1326
/PT-
BR –
12/
2020
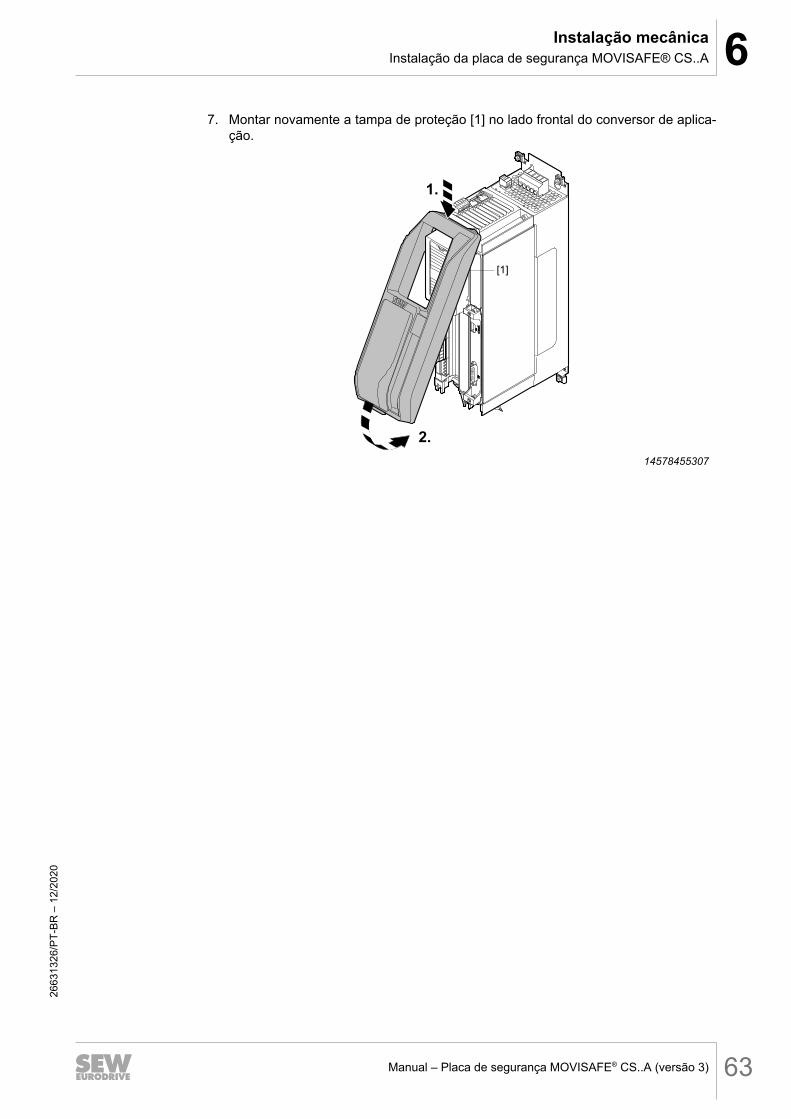
6Instalação mecânicaInstalação da placa de segurança MOVISAFE® CS..A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 63
7. Montar novamente a tampa de proteção [1] no lado frontal do conversor de aplica-ção.
[1]
5
4
3
2
1
2.
1.
14578455307
2663
1326
/PT-
BR –
12/
2020

7 Instalação elétricaInformação importante
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)64
7 Instalação elétrica
7.1 Informação importante
AVISONo MOVIDRIVE® modular/system/technology, o conector em ponte externo X6 estáinserido ou a tensão está conectada, embora uma placa de segurança MOVISAFE®
CS..A esteja instalada no MOVIDRIVE® modular/system/technology.Morte ou ferimentos graves.• Se uma placa de segurança MOVISAFE® CS..A estiver instalada no
MOVIDRIVE® modular/system/technology, o conector em ponte X6 não deve serinserido.
• Não deve haver tensão conectada.
7.2 Instruções de instalaçãoPara garantir a segurança elétrica e a operação sem falhas, deve-se seguir as nor-mas básicas de instalação e as notas das instruções de operação doMOVIDRIVE® modular, MOVIDRIVE® system e MOVIDRIVE® technology.
AVISOSomente as versões de conexão descritas nesta documentação podem ser usadas.Morte ou ferimentos graves.• Não são permitidas versões de conexão diferentes das especificadas nas outras
documentações.
7.3 CódigosMOVISAFE® CSB21A: 28233360MOVISAFE® CSS21A: 28233379MOVISAFE® CSB31A: 28233387MOVISAFE® CSS31A: 28233395MOVISAFE® CSA31A: 28266412
2663
1326
/PT-
BR –
12/
2020
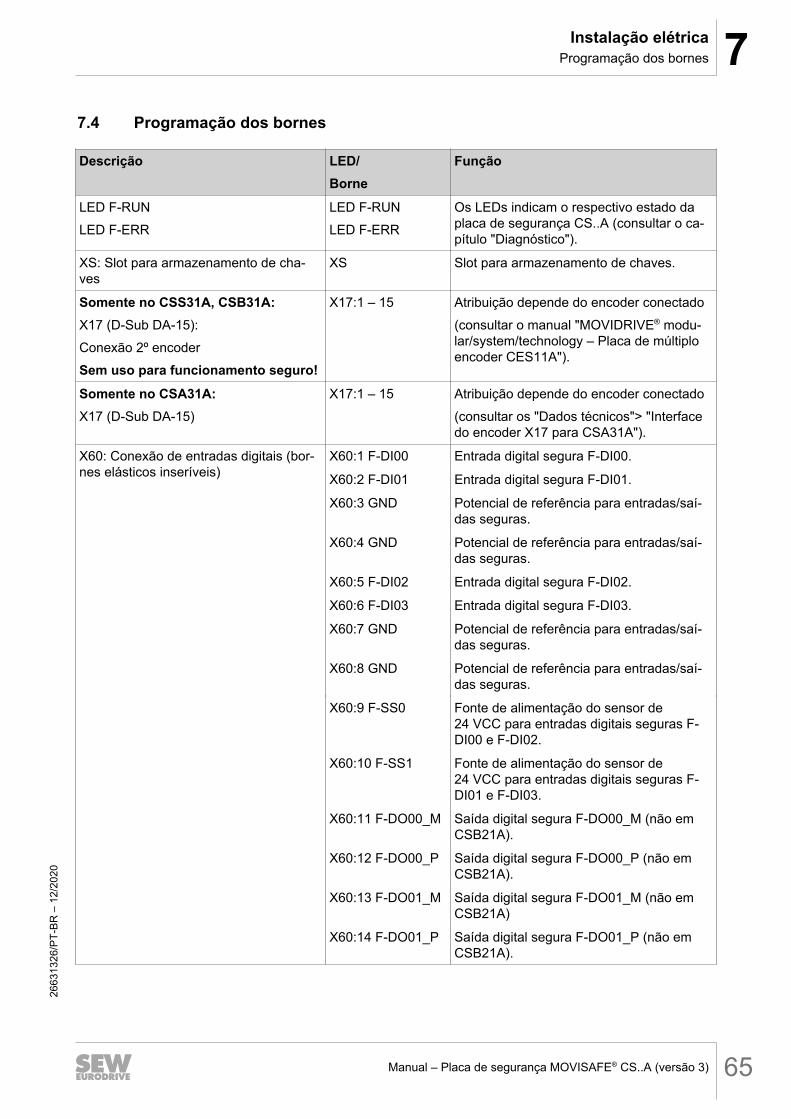
7Instalação elétricaProgramação dos bornes
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 65
7.4 Programação dos bornes
Descrição LED/Borne
Função
LED F-RUNLED F-ERR
LED F-RUNLED F-ERR
Os LEDs indicam o respectivo estado daplaca de segurança CS..A (consultar o ca-pítulo "Diagnóstico").
XS: Slot para armazenamento de cha-ves
XS Slot para armazenamento de chaves.
Somente no CSS31A, CSB31A:X17 (D-Sub DA-15):Conexão 2º encoderSem uso para funcionamento seguro!
X17:1 – 15 Atribuição depende do encoder conectado(consultar o manual "MOVIDRIVE® modu-lar/system/technology – Placa de múltiploencoder CES11A").
Somente no CSA31A:X17 (D-Sub DA-15)
X17:1 – 15 Atribuição depende do encoder conectado(consultar os "Dados técnicos"> "Interfacedo encoder X17 para CSA31A").
X60: Conexão de entradas digitais (bor-nes elásticos inseríveis)
X60:1 F-DI00 Entrada digital segura F-DI00.
X60:2 F-DI01 Entrada digital segura F-DI01.
X60:3 GND Potencial de referência para entradas/saí-das seguras.
X60:4 GND Potencial de referência para entradas/saí-das seguras.
X60:5 F-DI02 Entrada digital segura F-DI02.
X60:6 F-DI03 Entrada digital segura F-DI03.
X60:7 GND Potencial de referência para entradas/saí-das seguras.
X60:8 GND Potencial de referência para entradas/saí-das seguras.
X60:9 F-SS0 Fonte de alimentação do sensor de24 VCC para entradas digitais seguras F-DI00 e F-DI02.
X60:10 F-SS1 Fonte de alimentação do sensor de24 VCC para entradas digitais seguras F-DI01 e F-DI03.
X60:11 F-DO00_M Saída digital segura F-DO00_M (não emCSB21A).
X60:12 F-DO00_P Saída digital segura F-DO00_P (não emCSB21A).
X60:13 F-DO01_M Saída digital segura F-DO01_M (não emCSB21A)
X60:14 F-DO01_P Saída digital segura F-DO01_P (não emCSB21A).
2663
1326
/PT-
BR –
12/
2020
7 Instalação elétricaDesligamento seguro
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)66
7.5 Desligamento seguroSe uma placa de segurança MOVISAFE® CS..A in MOVIDRIVE® modular/system/te-chnology, o conector em ponte X6 no conversor deve ser removido. Nenhuma tensãoexterna poderá ser conectada à conexão X6 do conversor.
7.6 Entradas digitais seguras (F-DI.)As entradas digitais seguras (F-DI.) estão conectadas ao terminal de conexão X60.Nas seções a seguir são apresentadas e explicadas as possibilidades admissíveis deconexão.No interior da placa de segurança MOVISAFE® CS..A, o processamento do sinal dasentradas digitais seguras é de 2 canais. Assim, as entradas digitais seguras são ade-quadas para aplicações até SIL 3 conforme IEC 61508 e nível de desempenho "e" deacordo com EN ISO 13849-1. Os seguintes sensores devem ser conectados externa-mente assim como sua instalação de cabos devem cumprir as respectivas classes desegurança necessárias.• Sensores que ativam ou bloqueiam a alimentação do sensor F-SSx com pulsação
ativa a uma entrada digital segura (F-DIx). O comportamento do tempo da pulsa-ção não deve ser influenciada pelo sensor.
• Sensores eletrônicos ou unidades de avaliação que geram, de forma independen-te, pulsos de teste (pulsos de ativação ou desativação) nos sinais de entrada cujaduração é < 1 ms.
• Quaisquer fontes de sinal que gere um sinal de entrada CC no contexto da espe-cificação da F-DIx.
Para tal, observar os seguintes esquemas de conexões. Dependendo do tipo de sen-sor, as possíveis versões de conexão são limitadas. Observar também os capítulos"Requisitos para os sensores e atuadores externos" e as instruções gerais de instala-ção.A possível oscilação de contato e falhas podem ser filtrados através de um filtro deentrada parametrizável. Os processos de oscilação e as falhas menores que o tempode filtragem ajustado são removidos do sinal.As entradas que não forem utilizadas não precisam ser conectadas. Uma entradaaberta sempre é interpretada como sinal "0". O estado seguro das entradas digitaisseguras é a saída de "lógica 0" nos valores de processo associados.A placa de segurança MOVISAFE® CS..A avalia as entradas digitais da seguinte for-ma.Tipo de conexão 1 canal (contato normalmente fechado):
Nível de lógica do borne de entradaF-DI.
Valor de processo F-DI.
0 0
1 1
Tipo de conexão 2 canais equivalentes (contato normalmente fechado/contatonormalmente fechado):
Nível de lógica do borne deentrada F‑DI.
Nível de lógica do borne deentrada F‑DI. + 1
Valor de proces-so F‑DI.
0 0 0
0 1 0
2663
1326
/PT-
BR –
12/
2020
7Instalação elétricaEntradas digitais seguras (F-DI.)
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 67
Nível de lógica do borne deentrada F‑DI.
Nível de lógica do borne deentrada F‑DI. + 1
Valor de proces-so F‑DI.
1 0 0
1 1 1
Tipo de conexão 2 canais antivalentes (contato normalmente fechado/contatonormalmente aberto):
Nível de lógica do borne deentrada F‑DI.
Nível de lógica do borne deentrada F‑DI. + 1
Valor de proces-so F‑DI.
0 0 0
0 1 0
1 0 1
1 1 0
Na avaliação aos pares, 2 entradas digitais seguras F-DI. são combinadas para for-mar um par de entrada que atua em um valor de processo comum.A atribuição é feita de acordo com a tabela a seguir.
Borne de entrada Par de entrada Valor do processo atribuídoF-DI0
F-DI0/1 F-DI0F-DI1
F-DI2F-DI2/3 F-DI2
F-DI3
7.6.1 Monitoramento de discrepânciaA placa de segurança realiza um monitoramento do tempo de discrepância para pa-res de entrada no tipo de conexão de 2 canais equivalentes e 2 canais antivalentes. Omonitoramento do tempo de discrepância verifica se ambos os sinais de entrada for-necem níveis sem irregularidades que correspondem ao estado de comutação dosensor. Um desvio é tolerado para o tempo de discrepância parametrizado. Se o des-vio do estado do sinal esperado exceder o tempo de discrepância, ocorrerá uma irre-gularidade entrada. O tempo de discrepância pode ser ajustado para cada par de en-trada através de um parâmetro.A placa de segurança executa uma função de teste da chave para pares de entradano tipo de conexão de 2 canais equivalentes e 2 canais antivalentes a fim de verificara chave conectada quanto ao comportamento de comutação correto depois que umairregularidade de discrepância tenha sido detectada. A função de teste da chave podeser ativada e desativada para cada par de entrada através de um parâmetro. A fun-ção de teste da chave pressupõe que os contatos comutáveis sejam colocados no es-tado aberto/ativado após a ocorrência da irregularidade de discrepância de modo queambos os sinais de entrada assumam o estado requerido para o teste da chave:• Tipo de conexão 2 canais equivalentes
– F-DI. = lógica "0"– F-DI. + 1 = lógica "0"
• Tipo de conexão 2 canais antivalentes– F-DI. = lógica "0"– F-DI. + 1 = lógica "1"26
6313
26/P
T-BR
– 1
2/20
20
7 Instalação elétricaEntradas digitais seguras (F-DI.)
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)68
Somente neste caso a irregularidade de discrepância pode ser confirmada, caso con-trário, não será possível a confirmação e a entrada permanecerá parada na irregulari-dade de discrepância.
2663
1326
/PT-
BR –
12/
2020
7Instalação elétricaEntradas digitais seguras (F-DI.)
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 69
7.6.2 BloqueioUma função de bloqueio está disponível para as entradas digitais seguras. Esta podeser ativada com a ferramenta de parametrização "Assist CS.." por meio de um parâ-metro. O bloqueio impede que uma função do componente de segurança ativadaatravés das entradas digitais seguras seja desativada através da troca dos sinais deentrada do estado "0" para o estado "1" sem intervenção do usuário. O bloqueio defi-ne o valor de processo da entrada digital segura para a lógica "0" até que seja desblo-queada.O desbloqueio pode ser feito da seguinte maneira:• Através de uma entrada digital segura, parametrizada como "Confirmação da en-
trada digital segura bloqueável".• Através de uma entrada digital segura, parametrizada como "Confirmação da en-
trada digital segura bloqueável e irregularidade".• Através do bit "Confirmação F-DI" nos dados de saída do processo seguro.O desbloqueio ocorre por um flanco 0 → 1. Se houver um sinal alto permanente no F-DI ao qual o desbloqueio foi atribuído, este fato é relatado por um aviso após 20 s.Cada vez que a placa de segurança é ligada, as entradas digitais seguras com para-metrização ativa permanecem na posição lógica "0" até que uma confirmação sejaefetuada.Se uma das seguintes funções for atribuída à entrada digital segura, a função de blo-queio de um F-DI não deve ser ativada:• Confirmação de irregularidade• Confirmação de F-DI bloqueado• Modo silencioso• Liberação de passo SLI• SBT-Clearance
7.6.3 Monitoramento de sinaisO monitoramento de sinais detecta quando o sinal de entrada é muito longo em umestado indefinido (estado instável). A duração máxima para a qual um estado instávelé permitido é calculada a partir do tempo de filtragem ajustado multiplicado pelo valordo parâmetro Monitoramento de sinais (índice 8704, subíndice 8). Através do parâme-tro Monitoramento de sinais a função com o valor "0" também poderá ser desativada.Se o monitoramento de sinais estiver ativo e se a duração máxima for excedida, aplaca de segurança responderá com uma irregularidade de entrada.
2663
1326
/PT-
BR –
12/
2020
7 Instalação elétricaEntradas digitais seguras (F-DI.)
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)70
7.6.4 Pulsação e monitoração de erro cruzadoInformações sobre parametrização e princípio de operação podem ser encontradasno capítulo "Colocação em operação".Se a monitoração de erro cruzado for usada para uma entrada digital segura F-DI, aatribuição a seguir deve ser mantida entre a alimentação do sensor F-SS e a entradadigital segura F-DI:• F-DI00, F-DI02 através do respectivo sensor para F-SS0.• F-DI01, F-DI03 através do respectivo sensor para F-SS1.A monitoração de erro cruzado pode ser selecionada individualmente para cada en-trada.Se a monitoração de erro cruzado não for utilizada (por ex. em sensores com saídaOSSD), os sensores poderão ser alimentados a partir de SS0/F-SS1 ou de outra ten-são de +24 V que tenha a mesma referência de aterramento.
AVISOPerigo devido ao ajuste incorreto dos parâmetros F-DI. Tipo de conexão ao conec-tar sensores de 2 canais. No ajuste "1 canal", não há monitoramento de redundân-cia nem de discrepância.Morte ou ferimentos graves.• Ao conectar sensores de 2 canais, os parâmetros F-DI. Tipo de conexão em
"2 canais (antivalente/equivalente)" deverão ser ajustados.
Para aplicações seguras, só é autorizada a utilização das seguintes versões de cone-xão! Observar também a atribuição das versões de conexão das entradas digitais se-guras às estruturas de categorias de acordo com a norma EN ISO 13849-1.
2663
1326
/PT-
BR –
12/
2020
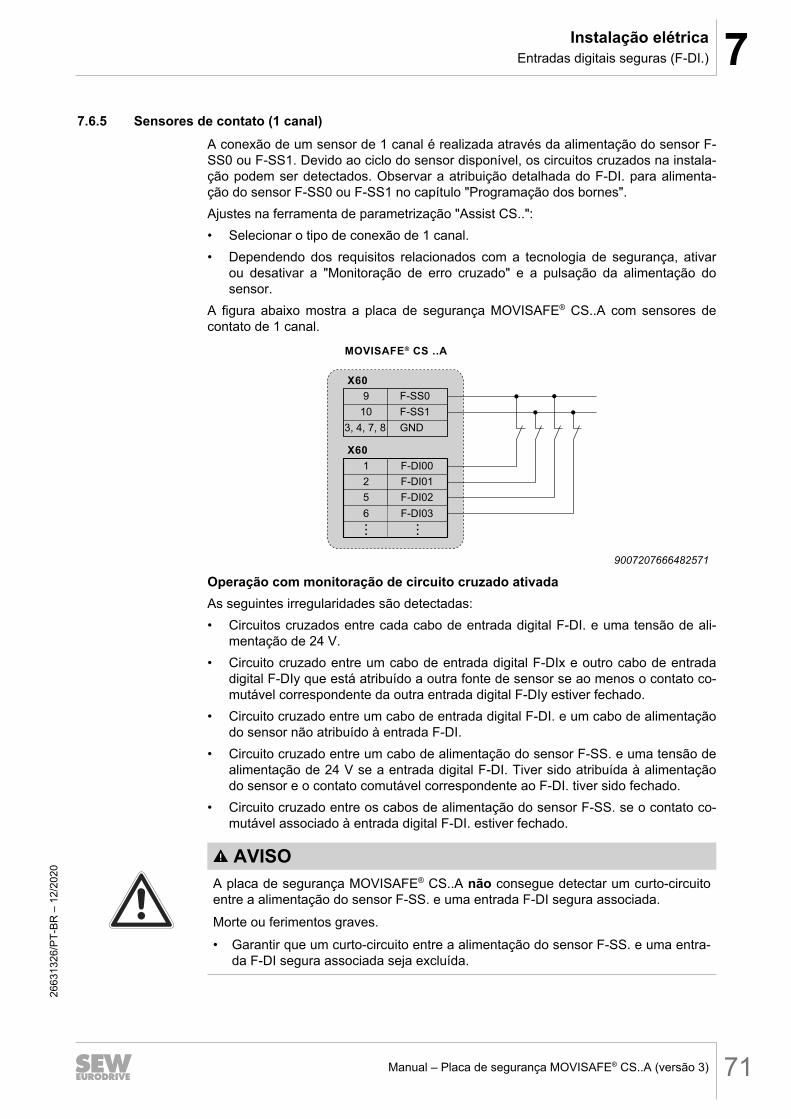
7Instalação elétricaEntradas digitais seguras (F-DI.)
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 71
7.6.5 Sensores de contato (1 canal)A conexão de um sensor de 1 canal é realizada através da alimentação do sensor F-SS0 ou F-SS1. Devido ao ciclo do sensor disponível, os circuitos cruzados na instala-ção podem ser detectados. Observar a atribuição detalhada do F-DI. para alimenta-ção do sensor F-SS0 ou F-SS1 no capítulo "Programação dos bornes".Ajustes na ferramenta de parametrização "Assist CS..":• Selecionar o tipo de conexão de 1 canal.• Dependendo dos requisitos relacionados com a tecnologia de segurança, ativar
ou desativar a "Monitoração de erro cruzado" e a pulsação da alimentação dosensor.
A figura abaixo mostra a placa de segurança MOVISAFE® CS..A com sensores decontato de 1 canal.
9
10
3, 4, 7, 8
F-SS0
F-DI00
F-DI01
F-DI02
F-DI03
F-SS1
GND
1
5
2
6
X60
X60
MOVISAFE® CS ..A
9007207666482571
Operação com monitoração de circuito cruzado ativadaAs seguintes irregularidades são detectadas:• Circuitos cruzados entre cada cabo de entrada digital F-DI. e uma tensão de ali-
mentação de 24 V.• Circuito cruzado entre um cabo de entrada digital F-DIx e outro cabo de entrada
digital F-DIy que está atribuído a outra fonte de sensor se ao menos o contato co-mutável correspondente da outra entrada digital F-DIy estiver fechado.
• Circuito cruzado entre um cabo de entrada digital F-DI. e um cabo de alimentaçãodo sensor não atribuído à entrada F-DI.
• Circuito cruzado entre um cabo de alimentação do sensor F-SS. e uma tensão dealimentação de 24 V se a entrada digital F-DI. Tiver sido atribuída à alimentaçãodo sensor e o contato comutável correspondente ao F-DI. tiver sido fechado.
• Circuito cruzado entre os cabos de alimentação do sensor F-SS. se o contato co-mutável associado à entrada digital F-DI. estiver fechado.
AVISOA placa de segurança MOVISAFE® CS..A não consegue detectar um curto-circuitoentre a alimentação do sensor F-SS. e uma entrada F-DI segura associada.Morte ou ferimentos graves.• Garantir que um curto-circuito entre a alimentação do sensor F-SS. e uma entra-
da F-DI segura associada seja excluída.
2663
1326
/PT-
BR –
12/
2020
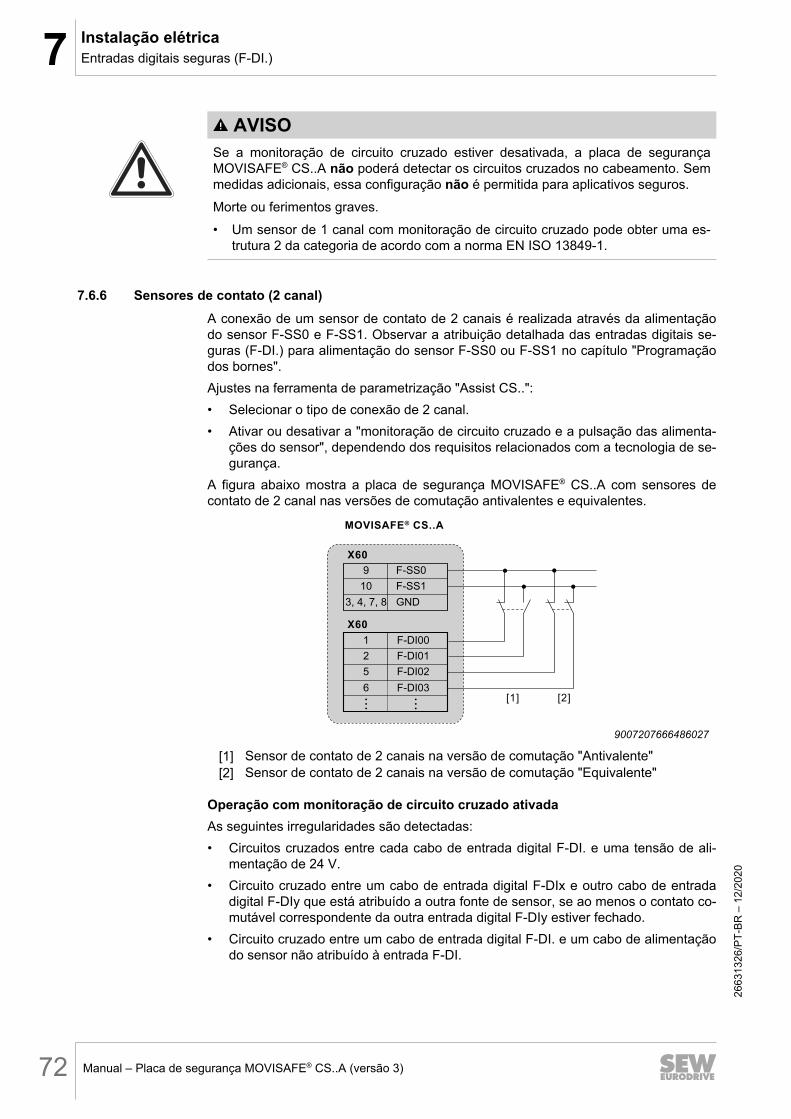
7 Instalação elétricaEntradas digitais seguras (F-DI.)
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)72
AVISOSe a monitoração de circuito cruzado estiver desativada, a placa de segurançaMOVISAFE® CS..A não poderá detectar os circuitos cruzados no cabeamento. Semmedidas adicionais, essa configuração não é permitida para aplicativos seguros.Morte ou ferimentos graves.• Um sensor de 1 canal com monitoração de circuito cruzado pode obter uma es-
trutura 2 da categoria de acordo com a norma EN ISO 13849-1.
7.6.6 Sensores de contato (2 canal)A conexão de um sensor de contato de 2 canais é realizada através da alimentaçãodo sensor F-SS0 e F-SS1. Observar a atribuição detalhada das entradas digitais se-guras (F-DI.) para alimentação do sensor F-SS0 ou F-SS1 no capítulo "Programaçãodos bornes".Ajustes na ferramenta de parametrização "Assist CS..":• Selecionar o tipo de conexão de 2 canal.• Ativar ou desativar a "monitoração de circuito cruzado e a pulsação das alimenta-
ções do sensor", dependendo dos requisitos relacionados com a tecnologia de se-gurança.
A figura abaixo mostra a placa de segurança MOVISAFE® CS..A com sensores decontato de 2 canal nas versões de comutação antivalentes e equivalentes.
9
10
3, 4, 7, 8
F-SS0
F-DI00
F-DI01
F-DI02
F-DI03
F-SS1
GND
1
5
2
6
X60
X60
MOVISAFE® CS..A
[1] [2]
9007207666486027
[1] Sensor de contato de 2 canais na versão de comutação "Antivalente"[2] Sensor de contato de 2 canais na versão de comutação "Equivalente"
Operação com monitoração de circuito cruzado ativadaAs seguintes irregularidades são detectadas:• Circuitos cruzados entre cada cabo de entrada digital F-DI. e uma tensão de ali-
mentação de 24 V.• Circuito cruzado entre um cabo de entrada digital F-DIx e outro cabo de entrada
digital F-DIy que está atribuído a outra fonte de sensor, se ao menos o contato co-mutável correspondente da outra entrada digital F-DIy estiver fechado.
• Circuito cruzado entre um cabo de entrada digital F-DI. e um cabo de alimentaçãodo sensor não atribuído à entrada F-DI.
2663
1326
/PT-
BR –
12/
2020
7Instalação elétricaEntradas digitais seguras (F-DI.)
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 73
• Circuito cruzado entre um cabo de alimentação do sensor F-SS. e uma tensão dealimentação de 24 V se a entrada digital F-DI. Tiver sido atribuída à alimentaçãodo sensor e o contato comutável correspondente ao F-DI tiver sido fechado.
• Circuito cruzado entre os cabos de alimentação do sensor F-SS. se o contato co-mutável associado à entrada digital F-DI estiver fechado.
Operação sem monitoração de circuito cruzadoAo usar um sensor de comutação antivalente de 2 canais, a placa de segurançaMOVISAFE® CS..A pode detectar um circuito cruzado entre as duas entradas digitaisde um par de entrada.
AVISOA placa de segurança MOVISAFE® CS..A não consegue detectar um curto-circuitoentre a alimentação do sensor F-SS. e uma entrada digital F-DI. segura associada(jumper do sensor).Morte ou ferimentos graves.• Garantir que um curto-circuito entre a alimentação do sensor F-SS. e uma entra-
da digital F-DI. segura associada seja excluída.
AVISOSe a monitoração de circuito cruzado estiver desativada e um sensor de comutaçãoequivalente de 2 canais for utilizado, a placa de segurança MOVISAFE® CS..A nãopoderá detectar os circuitos cruzados no cabeamento.Morte ou ferimentos graves.• Garantir que os circuitos cruzados nas entradas digitais seguras F-DI. sejam ex-
cluídos.
NOTAObservar que na versão de comutação antivalente, o contato normalmente fechadoé conectado à alimentação do sensor F-SS0.
2663
1326
/PT-
BR –
12/
2020
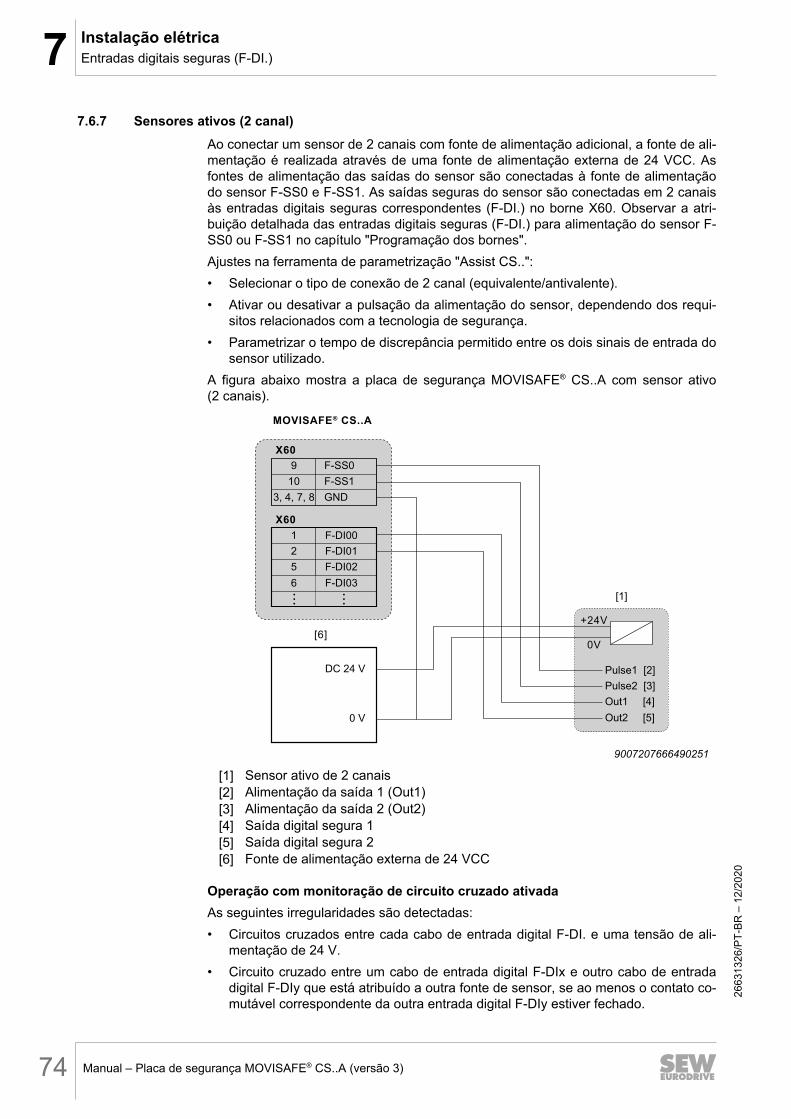
7 Instalação elétricaEntradas digitais seguras (F-DI.)
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)74
7.6.7 Sensores ativos (2 canal)Ao conectar um sensor de 2 canais com fonte de alimentação adicional, a fonte de ali-mentação é realizada através de uma fonte de alimentação externa de 24 VCC. Asfontes de alimentação das saídas do sensor são conectadas à fonte de alimentaçãodo sensor F-SS0 e F-SS1. As saídas seguras do sensor são conectadas em 2 canaisàs entradas digitais seguras correspondentes (F-DI.) no borne X60. Observar a atri-buição detalhada das entradas digitais seguras (F-DI.) para alimentação do sensor F-SS0 ou F-SS1 no capítulo "Programação dos bornes".Ajustes na ferramenta de parametrização "Assist CS..":• Selecionar o tipo de conexão de 2 canal (equivalente/antivalente).• Ativar ou desativar a pulsação da alimentação do sensor, dependendo dos requi-
sitos relacionados com a tecnologia de segurança.• Parametrizar o tempo de discrepância permitido entre os dois sinais de entrada do
sensor utilizado.A figura abaixo mostra a placa de segurança MOVISAFE® CS..A com sensor ativo(2 canais).
DC 24 V
0 V
[6]
9
10
3, 4, 7, 8
F-SS0
F-DI00
F-DI01
F-DI02
F-DI03
F-SS1
GND
1
5
2
6
X60
X60
MOVISAFE® CS..A
Pulse1 [2]
Pulse2 [3]
Out1 [4]
Out2 [5]
+24V
0V
[1]
9007207666490251
[1] Sensor ativo de 2 canais[2] Alimentação da saída 1 (Out1)[3] Alimentação da saída 2 (Out2)[4] Saída digital segura 1[5] Saída digital segura 2[6] Fonte de alimentação externa de 24 VCC
Operação com monitoração de circuito cruzado ativadaAs seguintes irregularidades são detectadas:• Circuitos cruzados entre cada cabo de entrada digital F-DI. e uma tensão de ali-
mentação de 24 V.• Circuito cruzado entre um cabo de entrada digital F-DIx e outro cabo de entrada
digital F-DIy que está atribuído a outra fonte de sensor, se ao menos o contato co-mutável correspondente da outra entrada digital F-DIy estiver fechado.
2663
1326
/PT-
BR –
12/
2020
7Instalação elétricaEntradas digitais seguras (F-DI.)
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 75
• Circuito cruzado entre um cabo de entrada digital F-DI. e um cabo de alimentaçãodo sensor não atribuído à entrada F-DI.
• Circuito cruzado entre um cabo de alimentação do sensor F-SS. e uma tensão dealimentação de 24 V se a entrada digital F-DI. Tiver sido atribuída à alimentaçãodo sensor e o contato comutável correspondente ao F-DI. tiver sido fechado.
• Circuito cruzado entre os cabos de alimentação do sensor F-SS. se o contato co-mutável associado à entrada digital F-DI. estiver fechado.
AVISOA placa de segurança MOVISAFE® CS..A não consegue detectar um curto-circuitoentre a alimentação do sensor F-SS. e uma entrada digital F-DI. segura associada(jumper do sensor).Morte ou ferimentos graves.• Garantir que um curto-circuito entre a alimentação do sensor F-SS. e uma entra-
da digital F-DI. segura associada seja excluída.
AVISOSe a monitoração de circuito cruzado estiver desativada, a placa de segurançaMOVISAFE® CS..A não poderá detectar os circuitos cruzados no cabeamento.Morte ou ferimentos graves.• Garantir que os circuitos cruzados nas entradas digitais seguras F-DI. sejam ex-
cluídos ou podem ser detectados pelo sensor.
2663
1326
/PT-
BR –
12/
2020
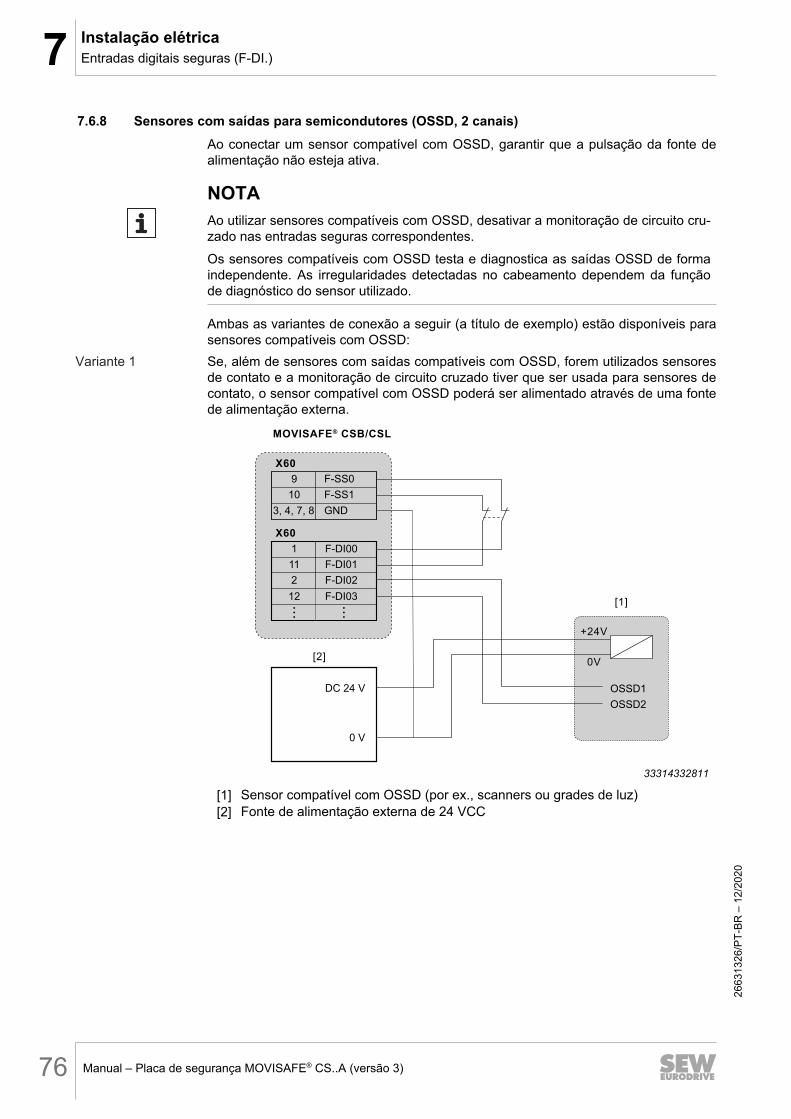
7 Instalação elétricaEntradas digitais seguras (F-DI.)
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)76
7.6.8 Sensores com saídas para semicondutores (OSSD, 2 canais)Ao conectar um sensor compatível com OSSD, garantir que a pulsação da fonte dealimentação não esteja ativa.
NOTAAo utilizar sensores compatíveis com OSSD, desativar a monitoração de circuito cru-zado nas entradas seguras correspondentes.Os sensores compatíveis com OSSD testa e diagnostica as saídas OSSD de formaindependente. As irregularidades detectadas no cabeamento dependem da funçãode diagnóstico do sensor utilizado.
Ambas as variantes de conexão a seguir (a título de exemplo) estão disponíveis parasensores compatíveis com OSSD:
Variante 1 Se, além de sensores com saídas compatíveis com OSSD, forem utilizados sensoresde contato e a monitoração de circuito cruzado tiver que ser usada para sensores decontato, o sensor compatível com OSSD poderá ser alimentado através de uma fontede alimentação externa.
DC 24 V
0 V
[2]
9
10
3, 4, 7, 8
F-SS0
F-DI00
F-DI01
F-DI02
F-DI03
F-SS1
GND
1
2
11
12
X60
X60
MOVISAFE® CSB/CSL
OSSD1
OSSD2
+24V
0V
[1]
33314332811
[1] Sensor compatível com OSSD (por ex., scanners ou grades de luz)[2] Fonte de alimentação externa de 24 VCC
2663
1326
/PT-
BR –
12/
2020
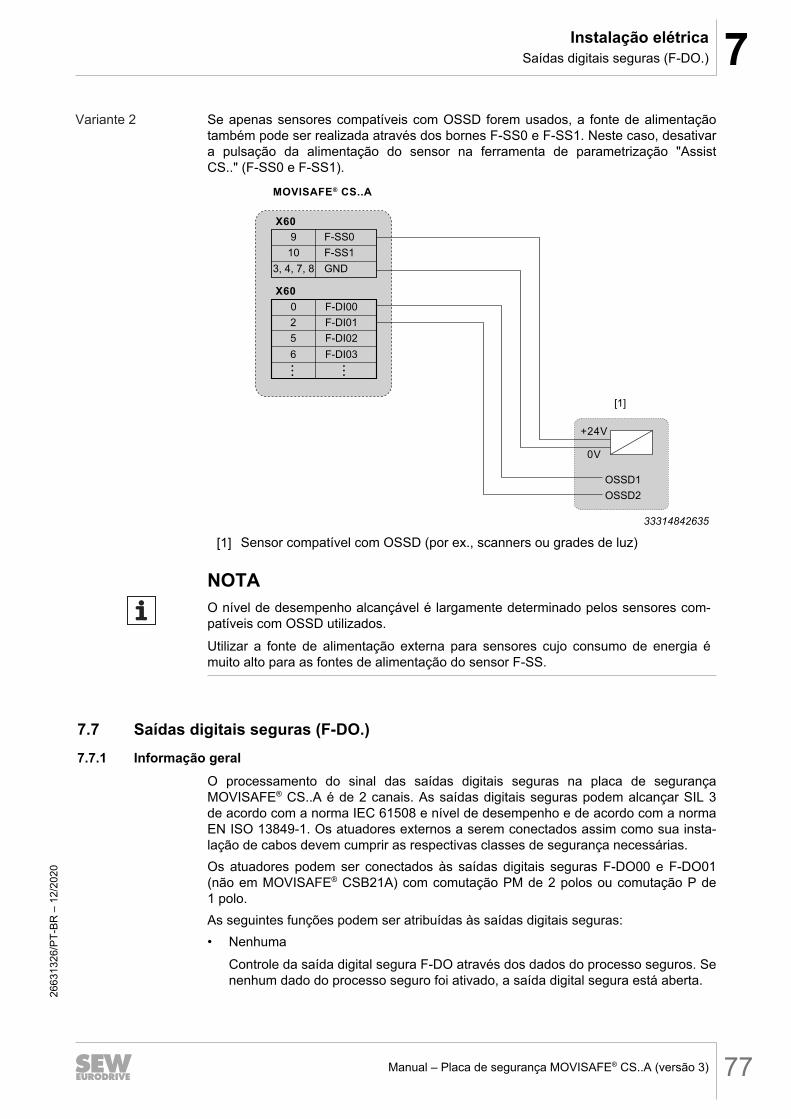
7Instalação elétricaSaídas digitais seguras (F-DO.)
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 77
Variante 2 Se apenas sensores compatíveis com OSSD forem usados, a fonte de alimentaçãotambém pode ser realizada através dos bornes F-SS0 e F-SS1. Neste caso, desativara pulsação da alimentação do sensor na ferramenta de parametrização "AssistCS.." (F-SS0 e F-SS1).
[1]
9
10
3, 4, 7, 8
F-SS0
F-DI00
F-DI01
F-DI02
F-DI03
F-SS1
GND
0
5
2
6
X60
X60
MOVISAFE® CS..A
OSSD1
OSSD2
+24V
0V
33314842635
[1] Sensor compatível com OSSD (por ex., scanners ou grades de luz)
NOTAO nível de desempenho alcançável é largamente determinado pelos sensores com-patíveis com OSSD utilizados.Utilizar a fonte de alimentação externa para sensores cujo consumo de energia émuito alto para as fontes de alimentação do sensor F-SS.
7.7 Saídas digitais seguras (F-DO.)7.7.1 Informação geral
O processamento do sinal das saídas digitais seguras na placa de segurançaMOVISAFE® CS..A é de 2 canais. As saídas digitais seguras podem alcançar SIL 3de acordo com a norma IEC 61508 e nível de desempenho e de acordo com a normaEN ISO 13849-1. Os atuadores externos a serem conectados assim como sua insta-lação de cabos devem cumprir as respectivas classes de segurança necessárias.Os atuadores podem ser conectados às saídas digitais seguras F-DO00 e F-DO01(não em MOVISAFE® CSB21A) com comutação PM de 2 polos ou comutação P de1 polo.As seguintes funções podem ser atribuídas às saídas digitais seguras:• Nenhuma
Controle da saída digital segura F-DO através dos dados do processo seguros. Senenhum dado do processo seguro foi ativado, a saída digital segura está aberta.
2663
1326
/PT-
BR –
12/
2020

7 Instalação elétricaSaídas digitais seguras (F-DO.)
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)78
• STOF-DO se comporta como F-DO_STO. O controle por meio de dados do processoseguros não é possível.
• SBCUm freio é conectado à saída digital segura. O controle por meio de dados do pro-cesso seguros só é possível indiretamente por meio da função do componente desegurança STO. A unidade básica controla o freio quando a função do componen-te de segurança STO está inativa. A função SBC só pode ser ativada se um freiotiver sido parametrizado no conversor no conjunto de acionamento 1.
Durante a colocação em operação, ajustar a configuração correspondente usando aferramenta de parametrização "Assist CS..".As saídas digitais com comutação M de 1 polo não são permitidas.Para todas as saídas digitais seguras, não é necessário usar cabos blindados.Observar a dependência do nível de desempenho (PL) alcançado e SIL na versão deconexão selecionada das saídas digitais seguras. Para cada uma de ambas as saí-das digitais seguras F-DO00 e F-DO01, é possível uma frequência de chaveamentomáxima de 10 Hz. O estado de comutação das saídas digitais seguras deve estar es-tável pelo menos uma vez em 60 segundos por pelo menos 2 segundos. Se o diag-nóstico detectar uma irregularidade, ocorre a resposta à irregularidade "Irregularidadeda saída" que bloqueia todas as saídas. Daqui resulta que a respectiva saída digital écolocado no estado seguro "aberto".De forma opcional, um diagnóstico pode ser ativado para as saídas de comutação de24 V F-DO00 e F-DO01. O diagnóstico detecta de maneira segura uma ruptura do fiono circuito de saída interrompido.Se a ruptura do fio for detectada, ocorre a resposta à irregularidade "Irregularidade dasaída" que bloqueia todas as saídas.Na operação independente, as saídas da placa de segurança podem ser desligadascom segurança. Isso significa que as saídas seguras são comutadas ao mesmo tem-po que a saída STO interna ou com um retardo em função da parametrização. As saí-das também podem ser configuradas com segurança por meio de um fieldbus seguro,por exemplo, para desativar o bloqueio de uma porta na parada.Com uma saída digital segura F-DO, é possível controlar até 10 entradas STO nasunidades do sistema modular MOVI-C® ou uma entrada STO e um módulo de freioSBM seguro.
7.7.2 Cargas capacitivas• Sem medidas adicionais, uma carga capacitiva de no máximo 10 nF poderá ser
operada na saída. Cargas capacitivas geralmente ocorrem em componentes ele-trônicos como capacitores de buffer.Se a carga capacitiva tiver um diodo em série com sua entrada, a capacitância decarga não deve exceder 12 μF. Este diodo está frequentemente disponível comodiodo de proteção contra polaridade incorreta em montagens eletrônicas.
• Se a carga capacitiva não é conhecida ou for maior que 10 nF, a corrente de parti-da deve ser limitada aos valores permitidos da saída de acordo com a normaDIN EN 61131-2.
NOTAEm cargas capacitivas, a frequência de chaveamento máxima das saídas digitais de-ve ser limitada ao valor especificado no capítulo "Dados técnicos” > "Saídas digitaisseguras" devido à carga térmica dos componentes de saída.
2663
1326
/PT-
BR –
12/
2020

7Instalação elétricaSaídas digitais seguras (F-DO.)
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 79
7.7.3 Cargas indutivasCargas indutivas são, por exemplo, relés, contatores e válvulas.• Cargas indutivas sempre devem ser conectadas com comutação PM.• A energia armazenada na indutância de carga, que depende do valor de indutân-
cia e da corrente, não pode exceder os valores especificados no capítulo "Dadostécnicos".
ATENÇÃOA operação de cargas indutivas sem rodas livres pode danificar a placa de seguran-ça MOVISAFE® CS..A.Danos na placa de segurança MOVISAFE® CS..A• As cargas indutivas devem sempre possuir um diodo de roda livre. As saídas di-
gitais seguras da placa de segurança MOVISAFE® CS..A não possuem rodas li-vres.
• Não são permitidos varistores e outros elementos de proteção.
7.7.4 Cargas ôhmicasCargas ôhmicas são por ex. lâmpadas.• Para fins de exibição, as lâmpadas podem ser conectadas. Observar que, no caso
das lâmpadas incandescentes e halógenas, ocorre um aumento da corrente friaquando forem ligadas. A corrente fria não pode exceder a corrente de saída per-mitida de acordo com a norma DIN EN 61131-2.
7.7.5 Informações sobre diagnósticos de cabos e pulsos de testePara monitoração do cabeamento, o circuito de saída gera pulsos de teste e, destaforma, detecta irregularidades no cabeamento externo. Ao mesmo tempo a tensão desaída é brevemente interrompida (pulso de teste). A duração máxima da interrupçãopode ser ajustada através do parâmetro F-DO Duração máxima do teste. A duraçãorequerida dos pulsos de teste é determinada pelas capacitâncias na carga conectada,que influenciam os diagnósticos de cabos.Para um desligamento seguro do MOVISAFE® CS..A com no máximo 10MOVIDRIVE® modular, MOVIDRIVE® system e MOVIDRIVE® technology, deve serutilizada uma duração do pulso de teste de 1 ms.Com a duração máxima do pulso de teste (5000 µs), as capacitâncias não devem ex-ceder 1 μF no total.O diagnóstico de cabos está sempre ativo para as saídas de comutação de 24 V F-DO00 e F-DO01, independentemente da parametrização.
2663
1326
/PT-
BR –
12/
2020
7 Instalação elétricaSaídas digitais seguras (F-DO.)
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)80
AVISOSe o diagnóstico de cabos for desativado, a placa de segurança MOVISAFE® CS..Anão poderá detectar curto-circuito gerado entre uma saída de comutação P (F-DO._P) e a tensão de alimentação de +24 V ou entre uma saída de comutação M(F-DO._M) e o potencial de referência.Morte ou ferimentos graves.Garantir que não haja curto-circuito através da fiação adequada:• entre uma saída de comutação P (F-DO._P) e a tensão de alimentação +24 V.• ou entre uma saída de comutação M (F-DO._M) e o potencial de referência.
As saídas F-DO00 e F-DO01 possuem uma monitoração de ruptura de fio opcional. Amonitoração de ruptura de fio verifica se o atuador conectado aceita uma correntemínima. Se a corrente do atuador estiver abaixo do valor mínimo, a placa de seguran-ça MOVISAFE® CS..A detecta esse fato como uma ruptura do cabo.Ativar somente a monitoração de ruptura de fio se tiver certeza de que o consumo decorrente do atuador está sempre acima da corrente mínima (consultar o capítulo "Da-dos técnicos" > "Saídas digitais seguras").
7.7.6 Saída digital interna segura F-DO_STOA placa de segurança possui uma saída digital interna segura para comutar a funçãoSTO interna da unidade do conversor. A saída digital interna segura está eletricamen-te conectada aos bornes STO na unidade. Portanto, nada deve ser conectado aosterminais de conexão externos.Uma frequência de chaveamento máxima de 10 Hz é permitida para a saída digital in-terna segura. O estado de comutação da saída digital interna segura deve estar está-vel pelo menos uma vez em 60 segundos por pelo menos 2 segundos.A saída digital interna segura F‑DO_STO é sempre operada no tipo de conexão"2 polos, comutação P" e é reservada exclusivamente para a função STO do conver-sor. Se os diagnósticos implementados para a saída digital interna segura F-DO_STOdetectarem uma irregularidade, ocorre uma resposta à irregularidade "Irregularidadeda saída", que bloqueia todas as saídas.Para a saída digital interna segura F-DO_STO, também poderá ser ativado um diag-nóstico avançado. Se o diagnóstico detectar uma irregularidade, ocorre a resposta àirregularidade "Irregularidade da saída" que bloqueia todas as saídas.O diagnóstico avançado possui as seguintes opções de configuração:• Ajuste "Teste durante a desativação"
Com este ajuste, a funcionalidade do diagnóstico na comutação STO do conver-sor é verificada imediatamente após a desativação da função STO.
• Ajuste "Teste durante desativação e monitoramento de tempo"O ajuste é idêntico ao opcional "Teste durante desativação". Se o diagnóstico nãofor realizado em 8 horas, a placa de segurança também emitirá uma mensagemde aviso. O monitoramento de tempo só funcionará corretamente se a placa desegurança desativar a função STO antes do intervalo de diagnóstico de 8 horas.O teste não é realizado quando a placa de segurança estiver ligada.
2663
1326
/PT-
BR –
12/
2020

7Instalação elétricaSaídas digitais seguras (F-DO.)
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 81
7.7.7 Atuador (2 canais, comutação PM)
F-DO00_P
F-DO00_M
F-DO01_P
F-DO01_M
12
11
14
13
X60
MOVISAFE® CS..A
[1]
[2]
33809250699
[1] Atuador 1[2] Atuador 2
Conectar o atuador entre F-DO._P e F-DO._M. O desligamento do atuador ainda épossível no caso de uma irregularidade de circuito cruzado em um dos cabos de co-nexão, pois a placa de segurança MOVISAFE® CSL desliga os bornes de saída P eM.A entrada do atuador deve ser livre de potencial e não pode estar conectada a um po-tencial de referência. Na placa de segurança MOVISAFE® CS..A existe um elementode comutação entre F-DO._M e o potencial de referência. Em um atuador com poten-cial, este elemento de comutação teria sido jumpeado. Não haveria mais redundânciade saída P e M.A versão de conexão com comutação PM é adequada para aplicações até SIL 3 con-forme IEC 61508 e nível de desempenho "e" de acordo com EN ISO 13849-1.Identificação da irregularidade por diagnóstico de cabosA placa de segurança MOVISAFE® CS..A detecta as seguintes irregularidades no ca-beamento externo quando a saída tiver sido ligada e desligada:• Curto-circuito entre a saída P e uma tensão de alimentação que esteja na faixa
15 – 30 V e tenha a mesma referência de aterramento que o MOVISAFE® CSL.• Curto-circuito entre a saída M e o potencial de referência ou uma tensão < 6 V.A placa de segurança MOVISAFE® CS..A também detecta as seguintes irregularida-des quando a saída tiver sido ligada:• Curto-circuito entre diferentes saídas P• Curto-circuito entre diferentes saídas M• Curto-circuito entre a saída P e M• Curto-circuito entre a saída P e o GND• Sobrecarga em cada saída• Ruptura de cabo (em F-DO, se ativada)
NOTAEm caso de curto-circuito, pode ocorrer uma corrente de curto-circuito elevada porum curto período de tempo. Dependendo da tensão de alimentação de 24 VCC, issopode levar a uma queda de tensão que afeta a operação do MOVIDRIVE® modularou MOVIDRIVE® system e/ou componentes individuais.Se a fonte de alimentação não estiver estável o suficiente, isso pode resultar no re-set e reinicialização da placa de segurança MOVISAFE® CS..A• Garantir que a fonte de alimentação não caia em curto-circuitos de saída.
2663
1326
/PT-
BR –
12/
2020
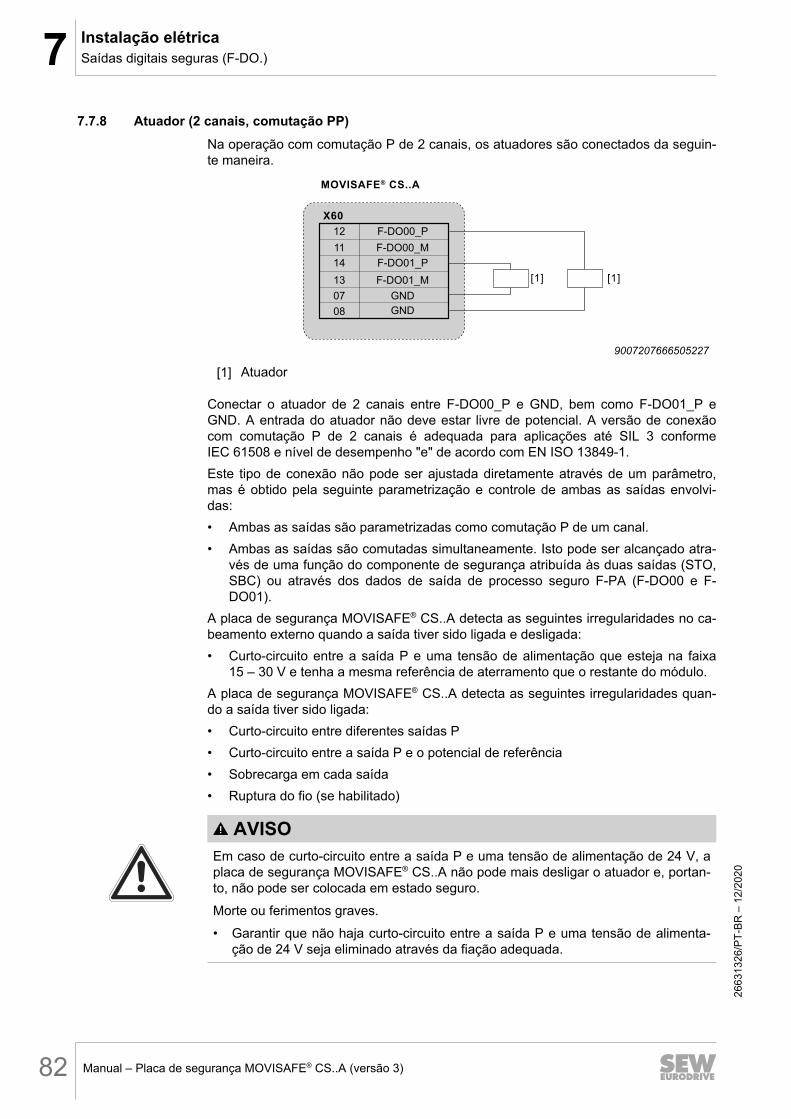
7 Instalação elétricaSaídas digitais seguras (F-DO.)
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)82
7.7.8 Atuador (2 canais, comutação PP)Na operação com comutação P de 2 canais, os atuadores são conectados da seguin-te maneira.
F-DO00_P
F-DO00_M
F-DO01_P
F-DO01_M
GND
GND
12
11
14
13
07
08
X60
MOVISAFE® CS..A
[1] [1]
9007207666505227
[1] Atuador
Conectar o atuador de 2 canais entre F-DO00_P e GND, bem como F-DO01_P eGND. A entrada do atuador não deve estar livre de potencial. A versão de conexãocom comutação P de 2 canais é adequada para aplicações até SIL 3 conformeIEC 61508 e nível de desempenho "e" de acordo com EN ISO 13849-1.Este tipo de conexão não pode ser ajustada diretamente através de um parâmetro,mas é obtido pela seguinte parametrização e controle de ambas as saídas envolvi-das:• Ambas as saídas são parametrizadas como comutação P de um canal.• Ambas as saídas são comutadas simultaneamente. Isto pode ser alcançado atra-
vés de uma função do componente de segurança atribuída às duas saídas (STO,SBC) ou através dos dados de saída de processo seguro F-PA (F-DO00 e F-DO01).
A placa de segurança MOVISAFE® CS..A detecta as seguintes irregularidades no ca-beamento externo quando a saída tiver sido ligada e desligada:• Curto-circuito entre a saída P e uma tensão de alimentação que esteja na faixa
15 – 30 V e tenha a mesma referência de aterramento que o restante do módulo.A placa de segurança MOVISAFE® CS..A detecta as seguintes irregularidades quan-do a saída tiver sido ligada:• Curto-circuito entre diferentes saídas P• Curto-circuito entre a saída P e o potencial de referência• Sobrecarga em cada saída• Ruptura do fio (se habilitado)
AVISOEm caso de curto-circuito entre a saída P e uma tensão de alimentação de 24 V, aplaca de segurança MOVISAFE® CS..A não pode mais desligar o atuador e, portan-to, não pode ser colocada em estado seguro.Morte ou ferimentos graves.• Garantir que não haja curto-circuito entre a saída P e uma tensão de alimenta-
ção de 24 V seja eliminado através da fiação adequada.
2663
1326
/PT-
BR –
12/
2020
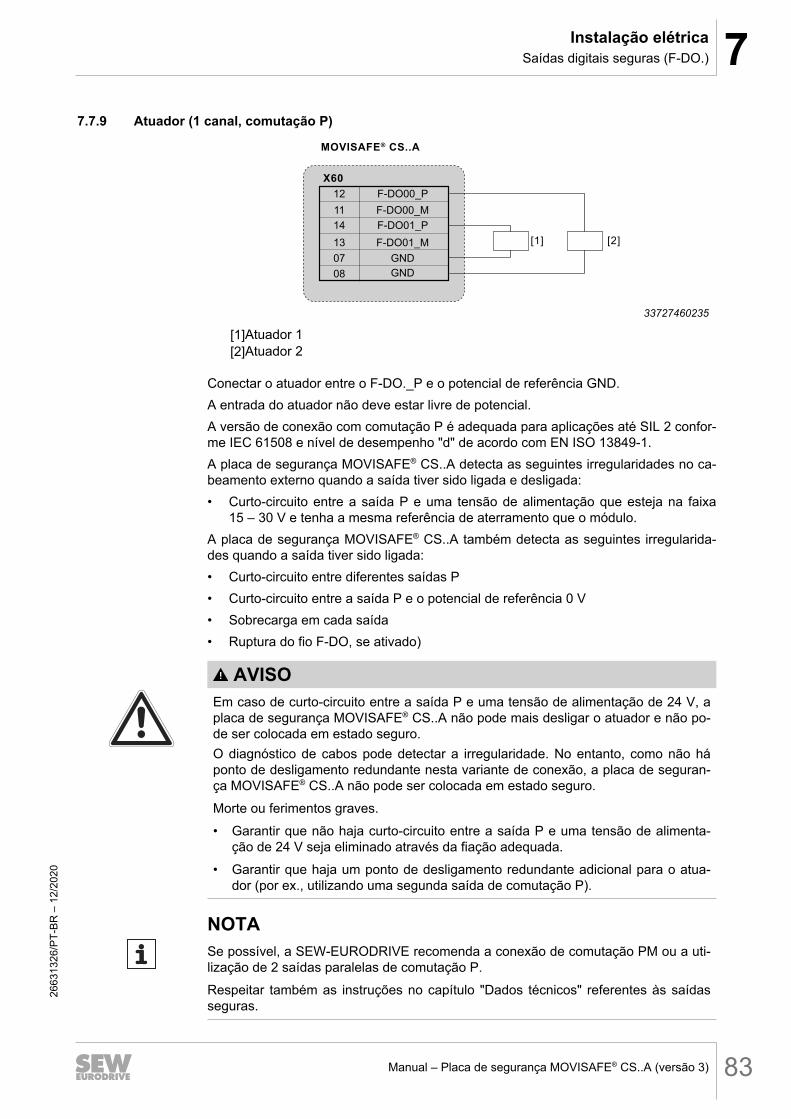
7Instalação elétricaSaídas digitais seguras (F-DO.)
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 83
7.7.9 Atuador (1 canal, comutação P)
F-DO00_P
F-DO00_M
F-DO01_P
F-DO01_M
GND
GND
12
11
14
13
07
08
X60
MOVISAFE® CS..A
[1] [2]
33727460235
[1]Atuador 1[2]Atuador 2
Conectar o atuador entre o F‑DO._P e o potencial de referência GND.A entrada do atuador não deve estar livre de potencial.A versão de conexão com comutação P é adequada para aplicações até SIL 2 confor-me IEC 61508 e nível de desempenho "d" de acordo com EN ISO 13849-1.A placa de segurança MOVISAFE® CS..A detecta as seguintes irregularidades no ca-beamento externo quando a saída tiver sido ligada e desligada:• Curto-circuito entre a saída P e uma tensão de alimentação que esteja na faixa
15 – 30 V e tenha a mesma referência de aterramento que o módulo.A placa de segurança MOVISAFE® CS..A também detecta as seguintes irregularida-des quando a saída tiver sido ligada:• Curto-circuito entre diferentes saídas P• Curto-circuito entre a saída P e o potencial de referência 0 V• Sobrecarga em cada saída• Ruptura do fio F‑DO, se ativado)
AVISOEm caso de curto-circuito entre a saída P e uma tensão de alimentação de 24 V, aplaca de segurança MOVISAFE® CS..A não pode mais desligar o atuador e não po-de ser colocada em estado seguro.O diagnóstico de cabos pode detectar a irregularidade. No entanto, como não háponto de desligamento redundante nesta variante de conexão, a placa de seguran-ça MOVISAFE® CS..A não pode ser colocada em estado seguro.Morte ou ferimentos graves.• Garantir que não haja curto-circuito entre a saída P e uma tensão de alimenta-
ção de 24 V seja eliminado através da fiação adequada.• Garantir que haja um ponto de desligamento redundante adicional para o atua-
dor (por ex., utilizando uma segunda saída de comutação P).
NOTASe possível, a SEW‑EURODRIVE recomenda a conexão de comutação PM ou a uti-lização de 2 saídas paralelas de comutação P.Respeitar também as instruções no capítulo "Dados técnicos" referentes às saídasseguras.
2663
1326
/PT-
BR –
12/
2020
7 Instalação elétricaEncoder integrado EI7C FS
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)84
NOTAEm caso de curto-circuito, pode ocorrer uma corrente de curto-circuito elevada porum curto período de tempo. Dependendo da tensão de alimentação de 24 V, isso po-de levar a uma queda de tensão que afeta a operação do MOVIDRIVE® modular ouMOVIDRIVE® system e/ou componentes individuais.Se a fonte de alimentação não estiver estável o suficiente, isso pode resultar no re-set e reinicialização da placa de segurança MOVISAFE® CS..A.• Garantir que a fonte de alimentação 24 VCC não entre em colapso no caso de
curto-circuitos de saída.
7.8 Encoder integrado EI7C FS7.8.1 Características
O encoder integrado EI7C FS é um encoder incremental seguro com 24 períodos desinal por volta.O uso do encoder integrado EI7C FS está permitido em conjunto com MOVISAFE®
CS..A.O MOVISAFE® CS..A pode detectar uma rotação mínima de 60 min-1 em conjuntocom o encoder integrado EI7C FS.O MOVISAFE® CS..A avalia o sinal do encoder integrado EI7C FS.O MOVISAFE® CS..A e o encoder integrado EI7C FS monitoram o sinal do encoder.A placa de segurança MOVISAFE® CS..A detecta interrupções e circuitos cruzadosno interior do cabo do encoder. Se ocorrer uma irregularidade, o MOVISAFE® CS..Aativa a função do componente de segurança STO no MOVIDRIVE® modular/system/technology e o torque é desligado com segurança.
2663
1326
/PT-
BR –
12/
2020
7Instalação elétricaEncoder integrado EI7C FS
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 85
7.8.2 InstalaçãoConectar o encoder integrado EI7C FS às entradas de encoder apropriadas de umMOVIDRIVE® modular/system/technology através de um cabo blindado.
AVISOA instalação incorreta pode desativar a função e monitorações do encoder.Morte ou ferimentos graves.• Somente é possível conectar o encoder à placa de segurança MOVISAFE®
CS..A.• Somente é possível conectar os sinais do encoder aos terminais de conexão de-
signados de um MOVIDRIVE® modular/system/technology. A conexão de outrasunidades ou módulos não é permitida.
NOTAAo conectar o encoder integrado EI7C FS ao MOVIDRIVE® modular/system/techno-logy, nenhum sinal TF deverá ser carregado no cabo do encoder.
2663
1326
/PT-
BR –
12/
2020
8 Colocação em operaçãoInformação importante
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)86
8 Colocação em operação
8.1 Informação importante
AVISODurante a parametrização da placa de segurança, pode ocorrer um movimentoinesperado e acidental do acionamento.Morte ou ferimentos graves.• Garantir que o sistema esteja parado antes de realizar a parametrização.
8.2 Informação geral sobre a colocação em operação
NOTA• O processo da colocação em operação das funções padrão do
MOVIDRIVE® modular/system/technology está descrito nas respectivas instru-ções de operação "MOVIDRIVE® modular", "MOVIDRIVE® system" ou"MOVIDRIVE® technology".
• Antes da colocação em operação da placa de segurança MOVISAFE® CS..A, ob-servar as dependências do firmware no capítulo "Compatibilidade".
• Se um freio estiver conectado ao MOVIDRIVE® modular/system/technology, omódulo funcional FCB 01 Bloqueio dos estágios de saída deve ser selecionadona árvore de parâmetros MOVISUITE® o módulo funcional em [Funções] > [Fun-ções de acionamento]. No FCB 01 Bloqueio estágio saída, o parâmetro Fecharfreio em STO deve ser ajustado para "Ligado".
• Os capítulos seguintes descrevem o procedimento da colocação em operaçãoadicional da placa de segurança MOVISAFE® CS..A e as funções do componentede segurança.
• Observar os requisitos para a instalação e operação do MOVISUITE®.• As placas de segurança MOVISAFE® CSB..A e CSS..A são suportadas pelo
MOVISUITE® a partir da versão 1.2.• A placa de segurança MOVISAFE® CSA..A é suportada pelo MOVISUITE® a par-
tir da versão 2.20.• O usuário deve garantir que apenas um Assist CS.. seja usado simultaneamente
no sistema.• Se várias unidades do mesmo tipo com parametrização idêntica forem colocadas
em operação, as unidades podem ser parametrizadas através da função "Impor-tar/Exportar". Observar que cada unidade deve ser removida.
• Quando a função do componente de segurança SBC tiver sido ativada, o freio se-rá controlado exclusivamente pelo F-DO selecionado. A saída digital segura F-DO. adota também a função do sistema de controle do freio DB00. Além disso, aconexão DB00 na unidade básica não deve ser usada. Um módulo de freio segu-ro da SEW‑EURODRIVE pode ser usado como atuador seguro para controlar ofreio.
2663
1326
/PT-
BR –
12/
2020
8Colocação em operaçãoVersões da colocação em operação
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 87
8.3 Versões da colocação em operação8.3.1 Pré-requisitos
Para uma colocação em operação bem-sucedida, é necessário a ferramenta de para-metrização "Assist CS..". A ferramenta de parametrização "Assist CS.." pode seracessada diretamente no MOVISUITE®, download em www.sew‑eurodrive.com).
NOTASomente uma ferramenta de parametrização "Assist CS.." pode ser usada simultane-amente no sistema.
8.3.2 Procedimento de parametrizaçãoEste capítulo descreve passo a passo a parametrização das funções do componentede segurança.1. Iniciar MOVISUITE®.2. Escanear rede.
Escanear a rede em que está localizada sua interface de engenharia para a uni-dade MOVIDRIVE® (USB, Ethernet etc.).
3. Iniciar a ferramenta de parametrização "Assist CS..".Iniciar a ferramenta de parametrização "Assist CS.." na interface do usuário doMOVISUITE®.Aparecerá uma janela solicitando que seja inserido o ID de armazenamento dechaves e a senha.
4. Inserir ID de armazenamento de chaves da unidade e estabelecer uma cone-xão.Inserir o ID de armazenamento de chaves da placa de segurança a ser parametri-zada e a senha correspondente e confirmar a entrada com [OK].O ID do armazenamento de chaves está impresso no armazenamento de chaves.Ao conectar-se pela primeira vez, é possível definir uma senha digitando-a duasvezes.A consulta do ID de armazenamento de chaves garante que a ferramenta de para-metrização "Assist CS.." se conecte à unidade correta.Como alternativa, é possível ler o ID de armazenamento de chaves usando a fer-ramenta de parametrização "Assist CS..". Proceder da seguinte maneira:• Clicar na tecla [ler ID do armazenamento de chaves].• Verificar se a unidade solicitada sinaliza a leitura do ID de armazenamento de
chaves através do LED "F-RUN" (consultar o capítulo "LED F-RUN"). Esse pro-cesso pode levar no máximo um minuto. Após um minuto, a unidade para depiscar e a confirmação do código intermitente não é mais aceita. Neste caso, énecessário reiniciar a consulta do código intermitente.
• O ID de armazenamento de chaves lido é copiado para o campo "ID de arma-zenamento de chaves".
2663
1326
/PT-
BR –
12/
2020
8 Colocação em operaçãoVersões da colocação em operação
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)88
5. Carregar a parametrização atual da união.Depois de inserir o ID de armazenamento de chaves, a parametrização atual daplaca de segurança CS..A é comparada com a parametrização atual na ferramen-ta de parametrização "Assist CS..". Se ambos os conjuntos de dados forem idênti-cos, será aberta a ferramenta de parametrização "Assist CS..". Em caso de diver-gência, abre-se uma caixa de diálogo através da qual o usuário pode selecionarse o conjunto de dados da placa de segurança ou o conjunto de dados do "AssistCS.." deve ser usado.
6. ParametrizaçãoAjustar a parametrização de acordo com os requisitos relacionados com a tecno-logia de segurança.Para parametrizar a placa de segurança MOVISAFE® CS..A, as áreas individuaisna árvore de parâmetros são acessadas e os valores de entrada necessários sãoinseridos. Na área "Parâmetros gerais", é realizada a parametrização de nível su-perior, como impacto da irregularidade IO, conexão fieldbus, ativação do encodere rotações limite do motor. Nas áreas "F-DI" e "F-DO", é implementada a parame-trização dos sensores/atuadores. Em seguida, os parâmetros das funções docomponente de segurança são ajustados e atribuídos às entradas/saídas parame-trizadas na área "Atribuição das funções".A ferramenta de parametrização "Assist CS.." cria um jogo de parâmetros a partirde todos os parâmetros.
7. Transferir o jogo de parâmetros para a unidadeAo clicar na tecla [download], o jogo de parâmetros é transferido para a placa desegurança MOVISAFE® CS..A.Após o download, o jogo de parâmetros transferido é verificado quanto à consis-tência e plausibilidade. Quaisquer inconsistências existentes e irregularidade con-siderável são exibidos e podem ser corrigidos posteriormente.
Se o jogo de parâmetros foi transferido sem irregularidades para a placa de seguran-ça MOVISAFE® CS..A, podem ocorrer a colocação em operação das funções padrãoe, quando necessário, a conexão ao controlador de segurança de nível superior (F-CLP).
8.3.3 Variante 1: Operação autônoma (sem conexão a comunicação segura)A placa de segurança MOVISAFE® CS..A pode ser configurada e operada sem comu-nicação segura (operação autônoma).Considerar as seguintes condições para este modo de operação:• A parametrização da placa de segurança MOVISAFE® CS..A é realizada através
da ferramenta de parametrização "Assist CS..".• A aceitação do sistema relacionada com a tecnologia de segurança é suportada
por um relatório de aceitação gerado na ferramenta de parametrização "AssistCS..".
Executar os seguintes passos para a colocação em operação:1. Parametrização das funções do componente de segurança na ferramenta de pa-
rametrização "Assist CS..".2. Colocação em operação de funções padrão.
Para obter mais informações, consultar o capítulo "Colocação em operação" nasinstruções de operação "MOVIDRIVE® modular", "MOVIDRIVE® system" e"MOVIDRIVE® technology".
3. A aceitação é suportada pela ferramenta de parametrização "Assist CS..".
2663
1326
/PT-
BR –
12/
2020
8Colocação em operaçãoAjuste da máxima duração do teste em carga com capacitância desconhecida
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 89
8.3.4 Variante 2: Com conexão ao PROFIsafeA placa de segurança MOVISAFE® CS..A pode ser parametrizada e operada comuma conexão ao PROFIsafe (conexão fieldbus).Considerar as seguintes condições para este modo de operação:• A parametrização da placa de segurança MOVISAFE® CS..A é realizada através
da ferramenta de parametrização "Assist CS..".• A validação do sistema é suportada por um relatório de aceitação gerado na ferra-
menta de parametrização "Assist CS..".Executar os seguintes passos para a colocação em operação:1. Parametrização das funções do componente de segurança na ferramenta de pa-
rametrização "Assist CS..".2. Colocação em operação do fieldbus e F-CLP de nível superior.3. Colocação em operação de funções padrão.
Para obter mais informações, consultar o capítulo "Colocação em operação" nasinstruções de operação "MOVIDRIVE® modular" e "MOVIDRIVE® system".
4. A aceitação é suportada pela ferramenta de parametrização "Assist CS..".
8.4 Ajuste da máxima duração do teste em carga com capacitânciadesconhecida
Para determinar o parâmetro "Máxima duração do teste" (índice 8705.2) para umacarga com capacitância desconhecida em uma saída digital segura (F-DO.), procederda seguinte forma:1. Selecionar uma de ambas as saídas digitais seguras F-DO00 ou F-DO01. Conec-
tar a carga de acordo com o tipo de conexão selecionado e ajustar o "Tipo de co-nexão".
2. Ajustar o parâmetro "Máxima duração do teste" (índice 8705.2) para o valor máxi-mo de 5.000 μs.
3. Ativar a saída selecionada por pelo menos 10 segundos.4. Calcular o valor máximo dos seguintes valores para a saída selecionada:
• Valor Parâmetro de exibição "Máxima duração do pulso de teste A" (índice8703.37)
• Valor Parâmetro de exibição "Máxima duração do pulso de teste B" (índice8703.8)
5. Bloquear a saída selecionada por pelo menos 10 segundos.6. Calcular o valor máximo dos seguintes valores para a saída selecionada:
• Valor máximo calculado a partir do passo 4• Valor Parâmetro de exibição "Máxima duração do pulso de teste A" (índice
8703.37)• Valor Parâmetro de exibição "Máxima duração do pulso de teste B" (8702.8)
7. Para definir o valor "Máxima duração do teste" (índice 8705.2), adicionar uma re-serva de 500 μs ao valor máximo determinado no passo 6.
2663
1326
/PT-
BR –
12/
2020
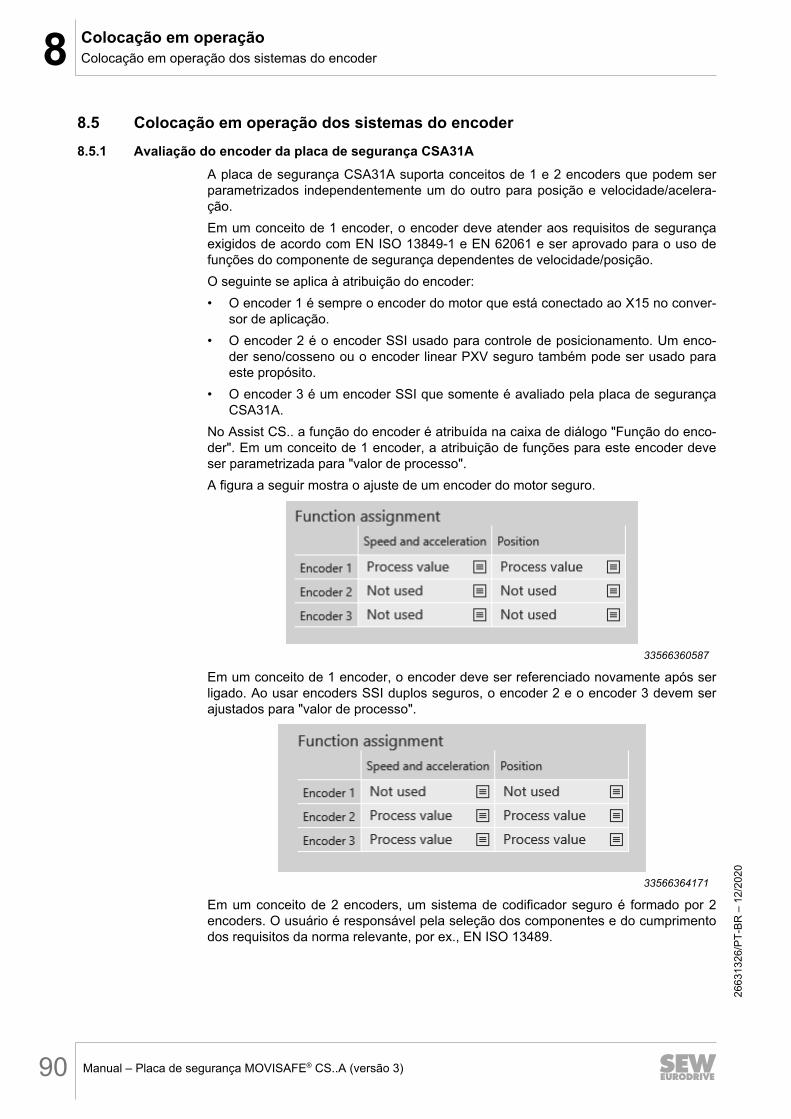
8 Colocação em operaçãoColocação em operação dos sistemas do encoder
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)90
8.5 Colocação em operação dos sistemas do encoder8.5.1 Avaliação do encoder da placa de segurança CSA31A
A placa de segurança CSA31A suporta conceitos de 1 e 2 encoders que podem serparametrizados independentemente um do outro para posição e velocidade/acelera-ção.Em um conceito de 1 encoder, o encoder deve atender aos requisitos de segurançaexigidos de acordo com EN ISO 13849‑1 e EN 62061 e ser aprovado para o uso defunções do componente de segurança dependentes de velocidade/posição.O seguinte se aplica à atribuição do encoder:• O encoder 1 é sempre o encoder do motor que está conectado ao X15 no conver-
sor de aplicação.• O encoder 2 é o encoder SSI usado para controle de posicionamento. Um enco-
der seno/cosseno ou o encoder linear PXV seguro também pode ser usado paraeste propósito.
• O encoder 3 é um encoder SSI que somente é avaliado pela placa de segurançaCSA31A.
No Assist CS.. a função do encoder é atribuída na caixa de diálogo "Função do enco-der". Em um conceito de 1 encoder, a atribuição de funções para este encoder deveser parametrizada para "valor de processo".A figura a seguir mostra o ajuste de um encoder do motor seguro.
33566360587
Em um conceito de 1 encoder, o encoder deve ser referenciado novamente após serligado. Ao usar encoders SSI duplos seguros, o encoder 2 e o encoder 3 devem serajustados para "valor de processo".
33566364171
Em um conceito de 2 encoders, um sistema de codificador seguro é formado por 2encoders. O usuário é responsável pela seleção dos componentes e do cumprimentodos requisitos da norma relevante, por ex., EN ISO 13489.
2663
1326
/PT-
BR –
12/
2020
8Colocação em operaçãoColocação em operação dos sistemas do encoder
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 91
Se ambos os encoders forem parametrizados para "valor de processo", primeiro veri-fica-se se ambos os valores do encoder estão dentro da tolerância configurada paraposição e velocidade. Em seguida, o valor médio é formado a partir de ambos os va-lores do encoder e usado para monitoramento nas funções do componente de segu-rança.Se um dos encoders for parametrizado para "valor de processo" e o 2º encoder para"valor de comparação", a diferença de ambos os valores do encoder deve estar den-tro da tolerância de posição e velocidade. O valor de processo é usado para monito-ramento nas funções do componente de segurança.Para o tempo de resposta na combinação de valor de processo/valor de comparação,considerar os respectivos valores de tolerância para posição e velocidade, bem comoa metade dos valores de tolerância ao calcular o valor médio.
2663
1326
/PT-
BR –
12/
2020
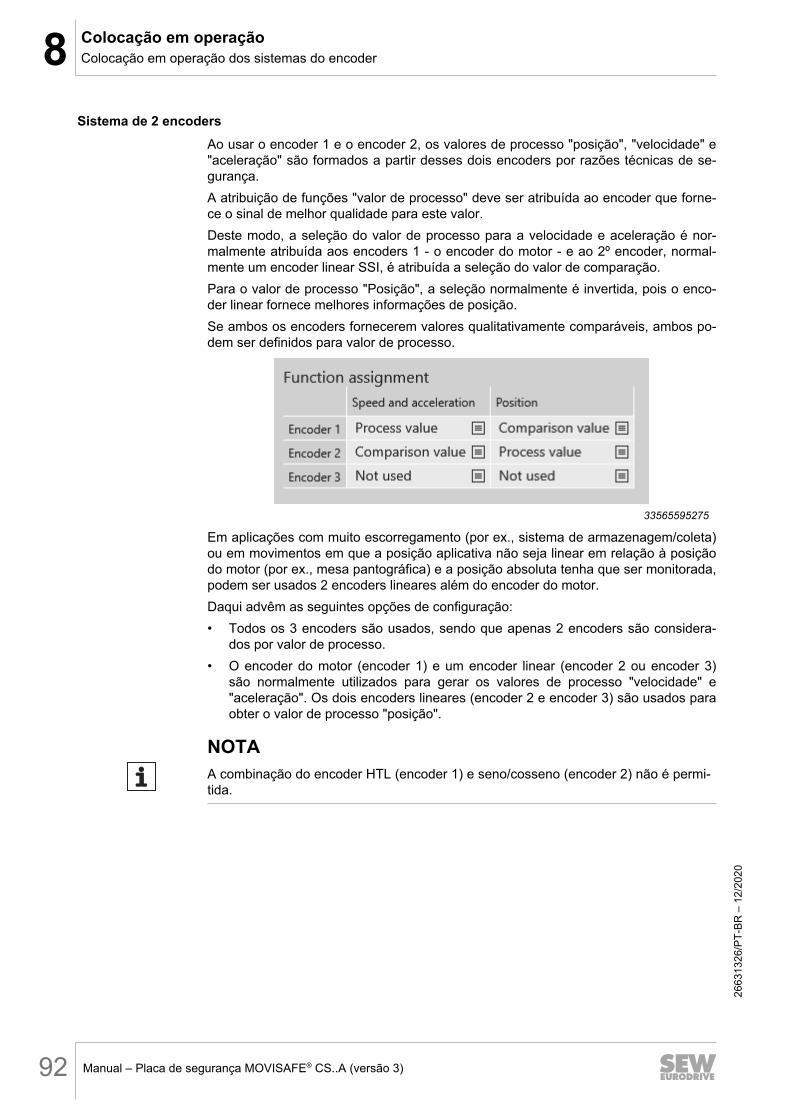
8 Colocação em operaçãoColocação em operação dos sistemas do encoder
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)92
Sistema de 2 encodersAo usar o encoder 1 e o encoder 2, os valores de processo "posição", "velocidade" e"aceleração" são formados a partir desses dois encoders por razões técnicas de se-gurança.A atribuição de funções "valor de processo" deve ser atribuída ao encoder que forne-ce o sinal de melhor qualidade para este valor.Deste modo, a seleção do valor de processo para a velocidade e aceleração é nor-malmente atribuída aos encoders 1 - o encoder do motor - e ao 2º encoder, normal-mente um encoder linear SSI, é atribuída a seleção do valor de comparação.Para o valor de processo "Posição", a seleção normalmente é invertida, pois o enco-der linear fornece melhores informações de posição.Se ambos os encoders fornecerem valores qualitativamente comparáveis, ambos po-dem ser definidos para valor de processo.
33565595275
Em aplicações com muito escorregamento (por ex., sistema de armazenagem/coleta)ou em movimentos em que a posição aplicativa não seja linear em relação à posiçãodo motor (por ex., mesa pantográfica) e a posição absoluta tenha que ser monitorada,podem ser usados 2 encoders lineares além do encoder do motor.Daqui advêm as seguintes opções de configuração:• Todos os 3 encoders são usados, sendo que apenas 2 encoders são considera-
dos por valor de processo.• O encoder do motor (encoder 1) e um encoder linear (encoder 2 ou encoder 3)
são normalmente utilizados para gerar os valores de processo "velocidade" e"aceleração". Os dois encoders lineares (encoder 2 e encoder 3) são usados paraobter o valor de processo "posição".
NOTAA combinação do encoder HTL (encoder 1) e seno/cosseno (encoder 2) não é permi-tida.
2663
1326
/PT-
BR –
12/
2020
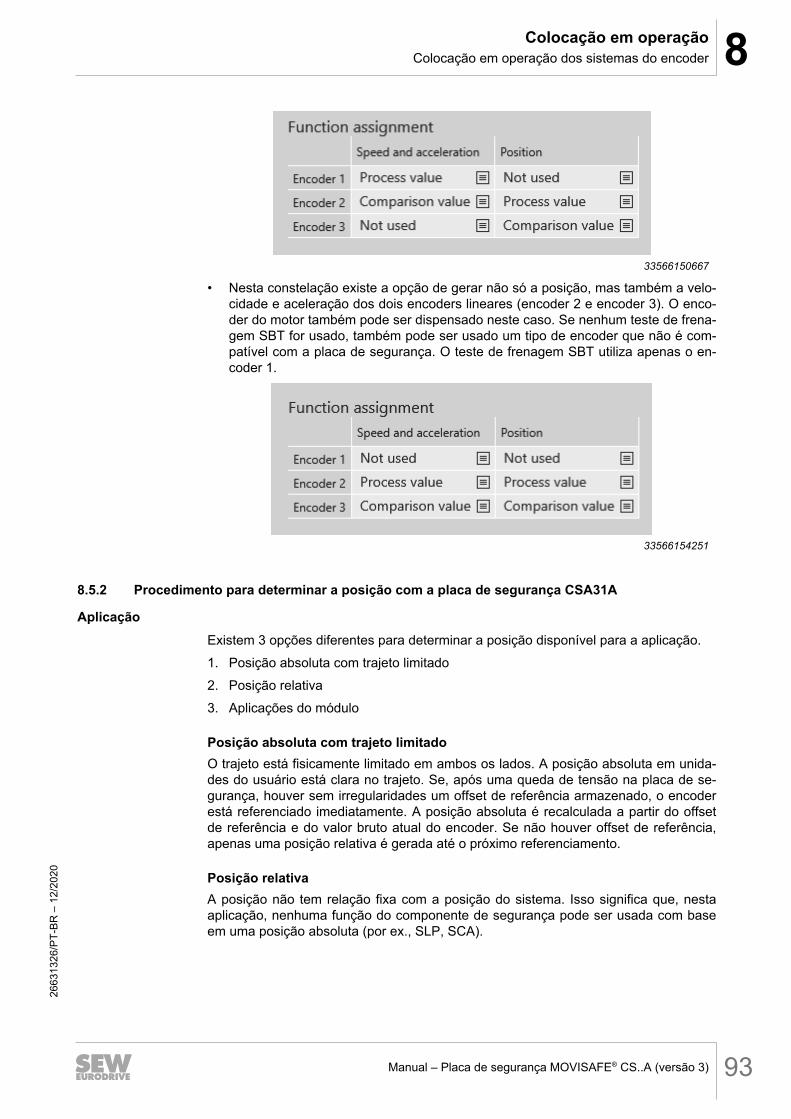
8Colocação em operaçãoColocação em operação dos sistemas do encoder
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 93
33566150667
• Nesta constelação existe a opção de gerar não só a posição, mas também a velo-cidade e aceleração dos dois encoders lineares (encoder 2 e encoder 3). O enco-der do motor também pode ser dispensado neste caso. Se nenhum teste de frena-gem SBT for usado, também pode ser usado um tipo de encoder que não é com-patível com a placa de segurança. O teste de frenagem SBT utiliza apenas o en-coder 1.
33566154251
8.5.2 Procedimento para determinar a posição com a placa de segurança CSA31A
AplicaçãoExistem 3 opções diferentes para determinar a posição disponível para a aplicação.1. Posição absoluta com trajeto limitado2. Posição relativa3. Aplicações do módulo
Posição absoluta com trajeto limitadoO trajeto está fisicamente limitado em ambos os lados. A posição absoluta em unida-des do usuário está clara no trajeto. Se, após uma queda de tensão na placa de se-gurança, houver sem irregularidades um offset de referência armazenado, o encoderestá referenciado imediatamente. A posição absoluta é recalculada a partir do offsetde referência e do valor bruto atual do encoder. Se não houver offset de referência,apenas uma posição relativa é gerada até o próximo referenciamento.
Posição relativaA posição não tem relação fixa com a posição do sistema. Isso significa que, nestaaplicação, nenhuma função do componente de segurança pode ser usada com baseem uma posição absoluta (por ex., SLP, SCA).
2663
1326
/PT-
BR –
12/
2020
8 Colocação em operaçãoColocação em operação dos sistemas do encoder
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)94
Aplicações do móduloSe o trajeto não estiver fisicamente limitado, os acionamentos poderão girar à vonta-de. Isso significa que depois de se mover uma ou várias vezes ao redor da faixa domódulo, o sistema se encontrará de volta à mesma posição.
EncoderEstão disponíveis 3 procedimentos diferentes para determinar a posição dos enco-ders.1. Posição absoluta sem contador de overflow2. Posição absoluta de volta única3. Avaliação incremental
Posição absoluta sem contador de overflow• Princípio de operação:
A escala (configuração) e o offset determinado durante o referenciamento são uti-lizados para converter entre os sistemas de referência Encoder e Posição absolu-ta em unidades do usuário.
• Utilização:Todos os encoders absolutos rotativos ou lineares, sem encoders incrementais.
• Restrição:A faixa de medição do encoder deve cobrir claramente o trajeto. A plausibilidadeocorre automaticamente durante a colocação em operação. Ao usar encoders demotor, deve ser observada a redução para o trecho.
• Comportamento durante a ligação:Se houver um referenciamento antes do desligamento, o encoder está referencia-do imediatamente ao ser ligado.
• Substituição da placa de segurança CSA31A:O referenciamento é mantido.
• Substituição do encoder:– No encoder de operação linear:
O referenciamento é mantido– No encoder de operação rotativa:
Novo referenciamento requerido
Posição absoluta de volta única• Princípio de operação:
O valor de posição inequívoco em uma revolução (volta única) é exibido em umafaixa do módulo (escala determinada pela configuração) e um offset determinadopor referenciamento.
• Utilização:Todos os encoders absolutos de operação rotativa (absoluto de volta única).
2663
1326
/PT-
BR –
12/
2020
8Colocação em operaçãoColocação em operação dos sistemas do encoder
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 95
• Restrição:O encoder deve estar instalado na aplicação de forma que sua área de volta únicaexiba uma revolução lógica (por ex., de uma mesa giratória). A faixa de mediçãode volta única do encoder deve corresponder exatamente à faixa do módulo emunidades do usuário após a reescala nestas unidades. Não deve haver resto dadivisão ao realizar a conversão. Sob esta condição, cada valor de posição brutade volta única é claramente exibido em uma posição absoluta em unidades dousuário dentro do intervalo do módulo configurado.
• Comportamento durante a ligação:Se houver um referenciamento antes do desligamento, o encoder está referencia-do imediatamente ao ser ligado.
• Substituição da placa de segurança CSA31A:Se houver um referenciamento antes do desligamento, o encoder está referencia-do imediatamente ao ser ligado.
• Substituição do encoder:Novo referenciamento requerido.
Avaliação incremental• Princípio de operação:
O valor da posição é continuamente atualizado em incrementos. Isso também seaplica a encoders HIPERFACE® e encoders absolutos SSI. Um encoderHIPERFACE®, que está conectado como encoder 2, deve ser avaliado em incre-mentos.
• Utilização:Todos os encoders.
• Restrição:O referenciamento é requerido após cada ligação.Dependendo do nível de desempenho (PL) ou SIL a ser alcançado, é necessárioum referenciamento regular:– PL e/SIL 3: 3 meses– PL d/SIL 2: 1 ano
• Comportamento durante a ligação:O encoder deve ser referenciado. Durante este período, nenhuma função do com-ponente de segurança baseada em uma posição absoluta pode ser usada.
• Substituição da placa de segurança CSA31A:Novo referenciamento requerido.
• Substituição do encoder:Novo referenciamento requerido.
2663
1326
/PT-
BR –
12/
2020
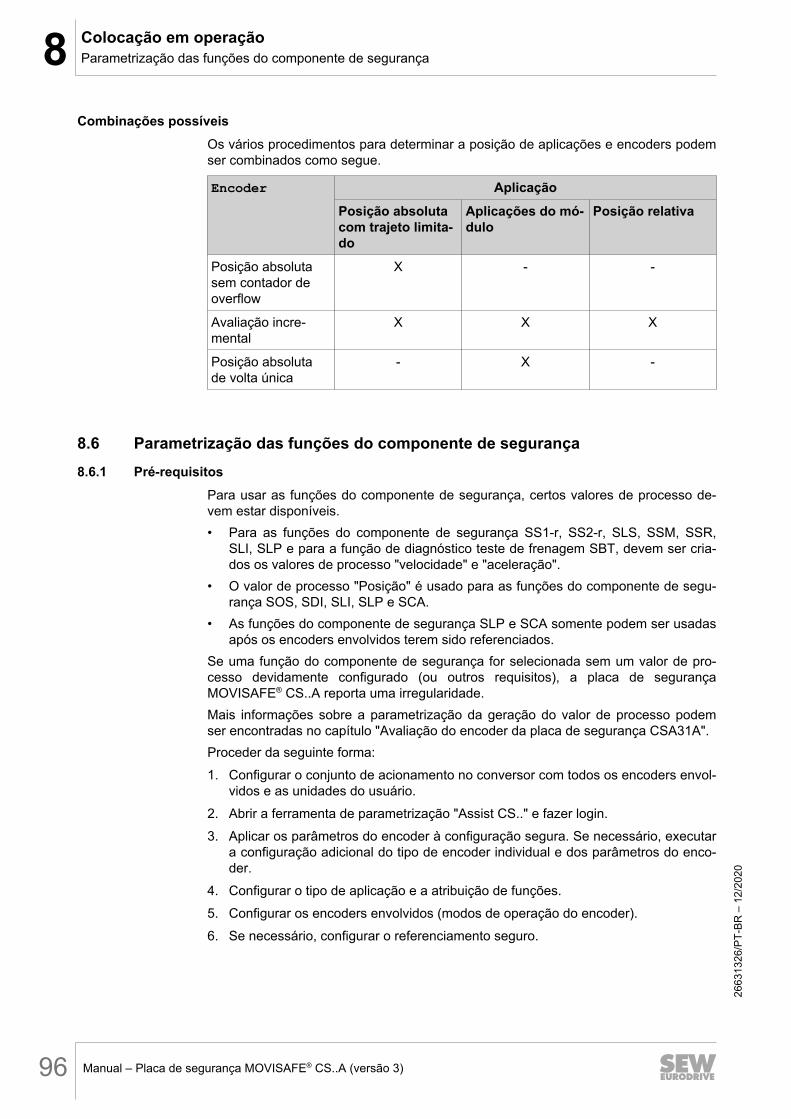
8 Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)96
Combinações possíveisOs vários procedimentos para determinar a posição de aplicações e encoders podemser combinados como segue.
Encoder AplicaçãoPosição absolutacom trajeto limita-do
Aplicações do mó-dulo
Posição relativa
Posição absolutasem contador deoverflow
X - -
Avaliação incre-mental
X X X
Posição absolutade volta única
- X -
8.6 Parametrização das funções do componente de segurança8.6.1 Pré-requisitos
Para usar as funções do componente de segurança, certos valores de processo de-vem estar disponíveis.• Para as funções do componente de segurança SS1-r, SS2-r, SLS, SSM, SSR,
SLI, SLP e para a função de diagnóstico teste de frenagem SBT, devem ser cria-dos os valores de processo "velocidade" e "aceleração".
• O valor de processo "Posição" é usado para as funções do componente de segu-rança SOS, SDI, SLI, SLP e SCA.
• As funções do componente de segurança SLP e SCA somente podem ser usadasapós os encoders envolvidos terem sido referenciados.
Se uma função do componente de segurança for selecionada sem um valor de pro-cesso devidamente configurado (ou outros requisitos), a placa de segurançaMOVISAFE® CS..A reporta uma irregularidade.Mais informações sobre a parametrização da geração do valor de processo podemser encontradas no capítulo "Avaliação do encoder da placa de segurança CSA31A".Proceder da seguinte forma:1. Configurar o conjunto de acionamento no conversor com todos os encoders envol-
vidos e as unidades do usuário.2. Abrir a ferramenta de parametrização "Assist CS.." e fazer login.3. Aplicar os parâmetros do encoder à configuração segura. Se necessário, executar
a configuração adicional do tipo de encoder individual e dos parâmetros do enco-der.
4. Configurar o tipo de aplicação e a atribuição de funções.5. Configurar os encoders envolvidos (modos de operação do encoder).6. Se necessário, configurar o referenciamento seguro.
2663
1326
/PT-
BR –
12/
2020
8Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 97
8.6.2 Função do componente de segurança STO com MOVISAFE® CS..AQuando a função do componente de segurança STO é ativada, a saída digital segurainterna F-DO_STO e as saídas digitais seguras F-DO, que foram atribuídas à funçãoSTO, são imediatamente desligadas. O módulo funcional FCB01 Bloqueio dos está-gios de saída ativado e o status STO são definidos na unidade básica.Se o parâmetro Liberação SBC estiver parametrizado para "Sim", todas as saídas di-gitais seguras F-DO atribuídas à função SBC serão imediatamente desligadas quan-do a função STO tiver sido ativada. Após ter decorrido o tempo ajustado no parâmetroTempo de atuação do freio, a saída digital interna segura F-DO_STO e todas as saí-das digitais seguras F-DO atribuídas à função STO são desligadas com um atraso.Se a função STO for ativada devido a uma violação do valor máximo de uma funçãodo componente de segurança, a saída digital segura interna F-DO_STO e todas assaídas digitais seguras F-DO atribuídas à função STO/SBC serão desligadas imedia-tamente.Se, durante a desaceleração da atuação do freio, ocorrer uma violação do valor máxi-mo de uma função do componente de segurança, irregularidade do sistema ou irregu-laridade de saída, o tempo de atuação do freio é imediatamente finalizado e a saídadigital segura interna F-DO_STO e todas as saídas digitais seguras F-DO atribuídas àfunção STO são desligadas. As saídas digitais seguras F-DO atribuídas à funçãoSBC já estão desligadas.Quando a função STO tiver sido desativada, a saída digital interna segura F-DO_STOe todas as saídas digitais seguras F-DO atribuídas à função STO/SBC são fechadasimediatamente.
AtivaçãoNúmero de instâncias: 1A função do componente de segurança STO/SBC pode ser selecionada através dasseguintes fontes:• F-DI (atribuição das funções)• Dados de saída de processo seguro (STO 1)• Estado final SSx 1/2• Resposta à irregularidade• Violação do valor máximo
StatusO status da função do componente de segurança STO/SBC é exibido nas seguintesáreas:• Diagnóstico MOVISAFE® CS..A, status STO• Dados de entrada de processo seguro (STO 1)
8.6.3 Função do componente de segurança SS1-t com MOVISAFE® CS..AA função do componente de segurança SS1-t monitora o atraso de tempo parametri-zado e aciona a função do componente de segurança STO ocorre após ter decorridoo tempo de atraso.Se o parâmetro Controle do conversor estiver ajustado para "Ativo", a função de acio-namento FCB13 Parada da aplicação é ativada no conversor quando a função docomponente de segurança SS1-t tiver sido ativada.
2663
1326
/PT-
BR –
12/
2020
8 Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)98
Se o parâmetro Controle do conversor estiver ajustado para "Não ativo", o conversornão será controlado.
AtivaçãoNúmero de instâncias: 2 (SSx1, SSx2)A função do componente de segurança pode ser selecionada através das seguintesfontes:• F-DI (atribuição das funções)• Dados de saída do processo seguro (SSx1, SSx2)
StatusO status da função do componente de segurança é exibido nas seguintes áreas:• Diagnóstico MOVISAFE® CS..A, status Funções de velocidade• Dados de entrada de processo seguro (SSx1, SSx2)
Violação do valor máximoA violação do valor máximo ativa a função do componente de segurança STO semdesaceleração da atuação do freio.A violação do valor máximo deve ser confirmada. A desativação da função SSx nãoconfirma a violação do valor máximo. A função SSx não pode ser reativada por umaviolação do valor máximo existente. A confirmação de irregularidade só pode ocorrerquando a função SSx estiver desativada. Depois de confirmar a irregularidade, o esta-do final da função SSx é ativado imediatamente.
Irregularidade do encoderSe ocorrer uma irregularidade no encoder, a função do componente de segurançaSTO é ativada imediatamente, sem desaceleração da atuação do freio. O status dafunção SSx se torna inativo. A irregularidade do encoder deve ser confirmada. A irre-gularidade do encoder não pode ser confirmada desativando a função SSx.
NOTASe uma instância SSx for atribuída como resposta à irregularidade de outra funçãodo componente de segurança, a função SLI não poderá ser parametrizada como es-tado final.
NOTAO FCB4 Operação manual tem maior prioridade em relação ao FCB19 Controle deretenção de posição. Isso significa que a função SS2 não pode ser testada em ope-ração manual com a parametrização Controlar conversor Ativo. O conversor não pa-ra o motor.
8.6.4 Função do componente de segurança SS1-r com MOVISAFE® CS..AA função do componente de segurança SS1-r monitora a extensão do atraso do mo-tor dentro dos limites especificados. Se a rotação do motor cair abaixo de um valormáximo especificado, a função do componente de segurança STO é ativada. Se a ro-tação limite for excedida, a função do componente de segurança STO é ativada sema desaceleração da atuação do freio. 26
6313
26/P
T-BR
– 1
2/20
20
8Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 99
Se a função do componente de segurança SS1-r estiver ativada, o atraso de monito-ramento (8706.9) parametrizado é inicialmente ativo. Durante o atraso de monitora-mento, a velocidade máxima (8707.1) parametrizada é monitorada. Em seguida, amonitoração da rampa de velocidade parametrizada é iniciada.Se o parâmetro Monitoramento da rampa for parametrizado para "linear", quando afunção do componente de segurança SS1-r tiver sido ativada, a monitoração da ram-pa de velocidade linear é iniciada na velocidade real atualmente detectada. A veloci-dade final da rampa de velocidade é a velocidade máxima parametrizada.Se o parâmetro Monitoramento da rampa for parametrizado para "Limite de retroces-sos", depois que a função do componente de segurança SS1-r tiver sido ativada, amonitoração da rampa de velocidade linear é iniciada na velocidade real atualmentedetectada e na velocidade de offset parametrizada. A velocidade final da rampa develocidade é a velocidade mínima parametrizada ou, se for maior, a velocidade de off-set parametrizada.Se a velocidade limite da rampa de velocidade atingir a velocidade final, o estado finalparametrizado (função do componente de segurança STO, SOS ou SLI) é ativado.Se o parâmetro Controle do conversor estiver ajustado para "Ativo", a função de acio-namento FCB13 Parada da aplicação será ativada no conversor quando a função docomponente de segurança tiver sido ativada.Se o parâmetro Controle do conversor estiver ajustado para "Não ativo", o conversornão será controlado.Se o parâmetro Controle do conversor estiver ajustado para "Ativo com limitação", arampa de parada do conversor é limitada aos seguintes valores:• Valor mínimo do atraso SSx• Valor máximo do tempo de retrocesso parametrizado
AtivaçãoNúmero de instâncias: 2 (SSx1, SSx2)A função do componente de segurança pode ser selecionada através das seguintesfontes:• F-DI (atribuição das funções)• Dados de saída do processo seguro (SSx1, SSx2)
StatusO status da função do componente de segurança é exibido nas seguintes áreas:• Diagnóstico MOVISAFE® CS..A, status Funções de velocidade• Dados de entrada de processo seguro (SSx1, SSx2)
Violação do valor máximoA violação do valor máximo ativa a função do componente de segurança STO semdesaceleração da atuação do freio.A violação do valor máximo deve ser confirmada. A desativação da função SSx nãoconfirma a violação do valor máximo. A função SSx não pode ser reativada por umaviolação do valor máximo existente. A confirmação de irregularidade só pode ocorrerquando a função SSx estiver desativada. Depois de confirmar a irregularidade, o esta-do final da função SSx é ativado imediatamente.
2663
1326
/PT-
BR –
12/
2020
8 Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)100
Irregularidade do encoderSe ocorrer uma irregularidade no encoder, a função do componente de segurançaSTO é ativada imediatamente, sem desaceleração da atuação do freio. O status dafunção SSx se torna inativo. A irregularidade do encoder deve ser confirmada. A irre-gularidade do encoder não pode ser confirmada desativando a função SSx.
NOTASe uma instância SSx for atribuída como resposta à irregularidade de outra funçãodo componente de segurança, a função SLI não poderá ser parametrizada como es-tado final.
8.6.5 Função do componente de segurança SS2-t com MOVISAFE® CS..AA função do componente de segurança SS2-t monitora o atraso de tempo parametri-zado e aciona a função do componente de segurança SOS ocorre após ter decorridoo tempo de atraso.Se o parâmetro Controle do conversor estiver ajustado para "Ativo", a função de acio-namento FCB19 Controle de retenção de posição é ativada no conversor quando afunção do componente de segurança SS2-t tiver sido ativada.Se o parâmetro Controle do conversor estiver ajustado para "Não ativo", o conversornão será controlado.
NOTAA função do componente de segurança SS2-t não deve ser usada em conjunto como encoder integrado EI7C FS.
AtivaçãoNúmero de instâncias: 2 (SSx1, SSx2)A função do componente de segurança pode ser selecionada através das seguintesfontes:• F-DI (atribuição das funções)• Dados de saída do processo seguro (SSx1, SSx2)
StatusO status da função do componente de segurança é exibido nas seguintes áreas:• Diagnóstico MOVISAFE® CS..A, status Funções de velocidade• Dados de entrada de processo seguro (SSx1, SSx2)
Violação do valor máximoA violação do valor máximo ativa a função do componente de segurança STO semdesaceleração da atuação do freio.A violação do valor máximo deve ser confirmada. A desativação da função SSx nãoconfirma a violação do valor máximo. A função SSx não pode ser reativada por umaviolação do valor máximo existente. A confirmação de irregularidade só pode ocorrerquando a função SSx estiver desativada. Depois de confirmar a irregularidade, o esta-do final da função SSx é ativado imediatamente.
2663
1326
/PT-
BR –
12/
2020
8Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 101
Irregularidade do encoderSe ocorrer uma irregularidade no encoder, a função do componente de segurançaSTO é ativada imediatamente, sem desaceleração da atuação do freio. O status dafunção SSx se torna inativo. A irregularidade do encoder deve ser confirmada. A irre-gularidade do encoder não pode ser confirmada desativando a função SSx.
NOTASe uma instância SSx for atribuída como resposta à irregularidade de outra funçãodo componente de segurança, a função SLI não poderá ser parametrizada como es-tado final.
8.6.6 Função do componente de segurança SS2-r com MOVISAFE® CS..A
NOTAA função do componente de segurança SS2-r não deve ser usada em conjunto como encoder integrado EI7C FS.
A função do componente de segurança SS2-r monitora a extensão do atraso do mo-tor dentro dos limites especificados.Se a rotação do motor cair abaixo de um valor máximo especificado, a função docomponente de segurança SS2-r acionará a função SOS. Se a rotação do motor ex-cede um valor máximo especificado, a função do componente de segurança STO éativadaSe a função do componente de segurança SS2-r estiver ativada, o atraso de monito-ramento (8706.9) parametrizado é inicialmente ativo. Durante o atraso de monitora-mento, a velocidade máxima (8707.1) parametrizada é monitorada. Em seguida, amonitoração da rampa de velocidade parametrizada é iniciada.Se o parâmetro Monitoramento da rampa for parametrizado para "linear", quando afunção do componente de segurança SS2-r tiver sido ativada, a monitoração da ram-pa de velocidade linear é iniciada na velocidade real atualmente detectada. A veloci-dade final da rampa de velocidade é a velocidade mínima parametrizada.Se o parâmetro Monitoramento da rampa for parametrizado para "Limite de retroces-sos", depois que a função do componente de segurança SS2-r tiver sido ativada, amonitoração da rampa de velocidade linear é iniciada na velocidade real atualmentedetectada e na velocidade de offset parametrizada. A velocidade final da rampa develocidade é a velocidade mínima parametrizada ou, se for maior, a velocidade de off-set parametrizada.Se a velocidade limite da rampa de velocidade atingir a velocidade final, o estado finalparametrizado (função do componente de segurança STO, SOS ou SLI) é ativado.Se o parâmetro Controle do conversor estiver ajustado para "Ativo", a função de acio-namento FCB19 Parada da aplicação será ativada no conversor quando a função docomponente de segurança tiver sido ativada.Se o parâmetro Controle do conversor estiver ajustado para "Não ativo", o conversornão será controlado.Se o parâmetro Controle do conversor estiver ajustado para "Ativo com limitação", arampa de parada do conversor é limitada aos seguintes valores:• Valor mínimo do atraso SSx• Valor máximo do tempo de retrocesso parametrizado
2663
1326
/PT-
BR –
12/
2020
8 Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)102
AtivaçãoNúmero de instâncias: 2 (SSx1, SSx2)A função do componente de segurança pode ser selecionada através das seguintesfontes:• F-DI (atribuição das funções)• Dados de saída do processo seguro (SSx1, SSx2)
StatusO status da função do componente de segurança é exibido nas seguintes áreas:• Diagnóstico MOVISAFE® CS..A, status Funções de velocidade• Dados de entrada de processo seguro (SSx1, SSx2)
Violação do valor máximoA violação do valor máximo ativa a função do componente de segurança STO semdesaceleração da atuação do freio.A violação do valor máximo deve ser confirmada. A desativação da função SSx nãoconfirma a violação do valor máximo. A função SSx não pode ser reativada por umaviolação do valor máximo existente. A confirmação de irregularidade só pode ocorrerquando a função SSx estiver desativada. Depois de confirmar a irregularidade, o esta-do final da função SSx é ativado imediatamente.
Irregularidade do encoderSe ocorrer uma irregularidade no encoder, a função do componente de segurançaSTO é ativada imediatamente, sem desaceleração da atuação do freio. O status dafunção SSx se torna inativo. A irregularidade do encoder deve ser confirmada. A irre-gularidade do encoder não pode ser confirmada desativando a função SSx.
NOTASe uma instância SSx for atribuída como resposta à irregularidade de outra funçãodo componente de segurança, a função SLI não poderá ser parametrizada como es-tado final.
8.6.7 Função do componente de segurança STO com MOVISAFE® CS..A
NOTAA função do componente de segurança SOS não deve ser usada em conjunto com oencoder integrado EI7C FS.
A função do componente de segurança SOS monitora a posição do acionamento coma tolerância de posição parametrizada.Quando a função do componente de segurança SOS é ativada, o módulo funcionalFCB 19 Controle de retenção de posição é ativado na unidade básica. A posição limi-te positiva e negativa é determinada com base na posição atual atualmente detectadae na tolerância de posição parametrizada.Se a posição limite positiva ou negativa for excedida, a resposta à irregularidade(STO) é acionada. Após uma violação do valor máximo, as posições limite são recal-culadas com base na posição atual através da confirmação de irregularidade. 26
6313
26/P
T-BR
– 1
2/20
20
8Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 103
AtivaçãoNúmero de instâncias: 1A função do componente de segurança SOS pode ser selecionada através das se-guintes fontes:• F-DI (atribuição das funções)• Dados de saída do processo seguro (SOS1)• Estado final de SS2 ou SLI
StatusSe a função do componente de segurança SOS estiver ativada e as posições limitesdeterminadas não forem excedidas, o status da função do componente de segurançaSOS estará ativo. O status é exibido nas seguintes áreas:• Diagnóstico MOVISAFE® CS, status das funções de posição• Dados de entrada do processo seguro (SOS1)
Resposta à irregularidadeQuando uma das posições limite é excedida, a função do componente de segurançaSTO é ativada como resposta à irregularidade sem a desaceleração da atuação dofreio.
8.6.8 Função do componente de segurança SLA com MOVISAFE® CS..A
NOTAEsta função do componente de segurança SLA não deve ser usada em conjuntocom o encoder integrado EI7C FS.
A função SLA monitora a aceleração dentro dos valores máximo parametrizados. Sea função do componente de segurança SLA estiver ativada, o atraso de monitoramen-to (8706.9) parametrizado é inicialmente ativo. Durante o atraso de monitoramento, avelocidade máxima (8707.1) parametrizada é monitorada. Em seguida, a monitoraçãoda rampa de velocidade parametrizada é iniciada.A aceleração real é monitorada sob as seguintes condições:• A velocidade está acima da Velocidade mínima das funções de aceleração para-
metrizadas (8707.6).• A velocidade é aumentada.Se a velocidade for reduzida, não haverá monitoração.Se o limite de aceleração (8706.73) parametrizado for excedido, ocorre uma respostaà irregularidade (8706.32).Se o parâmetro Comando do conversor for parametrizado para "Ativo com limitação",a aceleração do conversor é limitada aos valores máximos da função SLA subtraídosdo valor definido no parâmetro Offset de aceleração.A ultrapassagem do limite de aceleração deve ser confirmada. Na resposta à irregula-ridade "Somente F-PE", o status da função SLA é automaticamente redefinido se o li-mite de aceleração tiver sido mais uma vez respeitado. Um protocolo seguro deve serselecionado para isso.
2663
1326
/PT-
BR –
12/
2020
8 Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)104
AtivaçãoNúmero de instâncias: 2A função do componente de segurança SLA pode ser selecionada através das se-guintes fontes:• F-DI (atribuição das funções)• Dados de saída do processo seguros (SLA1, SLA2)• Ativação permanente
StatusSe a função do componente de segurança SLA estiver ativada e os valores máximosnão forem excedidos, o status da função SLA estará ativo. O status é exibido nas se-guintes áreas:• Diagnóstico MOVISAFE® CS..A, Status Funções de aceleração• Dados de entrada de processo seguro (SLA1, SLA2)
Resposta à irregularidadeSe um dos limites de monitoramento for excedido, uma das seguintes respostas à ir-regularidade parametrizadas poderá ser ativada:• STO• SSx1• SSx2• F-PE
8.6.9 Função do componente de segurança SLS com MOVISAFE® CS..AA função do componente de segurança SLS monitora a velocidade real quanto à ul-trapassagem do limite de velocidade parametrizado. Em caso de ultrapassagem, aresposta à irregularidade parametrizada é ativada.Através do filtro de velocidades, é possível ultrapassar o limite de velocidade "a curtoprazo" sem acionar a resposta à irregularidade (consultar parâmetro Filtro da veloci-dade, índice 8706.25).A monitoração do limite de velocidade SLS ou o início da rampa de transição podeser atrasada pelo parâmetro Atraso de monitoramento t2. Durante o atraso de monito-ração, a velocidade real é monitorada quanto à ultrapassagem da velocidade máximaparametrizada.Se o parâmetro Tipo de rampa estiver definido como "Linear", uma rampa de transi-ção linear da velocidade máxima parametrizada ou da velocidade atual é monitorada.Se o parâmetro Tipo de rampa estiver definido como "Limite de retrocessos", umarampa de transição com limitação de retrocesso da velocidade máxima parametrizadaou da velocidade atual é monitorada.O parâmetro Direção efetiva pode ser usado para definir em que sentido de rotação afunção SLS deve atuar:• Apenas em um sentido de rotação positivo• Apenas em sentido de rotação negativo• Ambos os sentidos de rotação
2663
1326
/PT-
BR –
12/
2020
8Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 105
AtivaçãoNúmero de instâncias: 4A função do componente de segurança SLS pode ser selecionada através das se-guintes fontes:• F-DI (atribuição das funções)• Dados seguros de saída do processo (SLS 1, SLS 2, SLS 3, SLS 4)• Ativação permanente
StatusSe a função SLS é ativada e a rampa de transição tiver terminado, o status da funçãoSLS fica ativo. Quando o limite de velocidade é excedido, o status é desativado.O status é exibido nas seguintes áreas:• Diagnóstico MOVISAFE® CS..A, status Funções de velocidade• Dados de entrada de processo seguros (SLS1, SLS2, SLS3, SLS4)
Resposta à irregularidadeUma das seguintes respostas à irregularidade parametrizadas pode ser ativada:• STO• SSx 1• SSx 2
8.6.10 Função do componente de segurança SSR com MOVISAFE® CS..AA função SSR monitora a velocidade do motor dentro dos limites de velocidade para-metrizados. Se os valores máximos forem excedidos, a resposta à irregularidade pa-rametrizada é acionada. O acionamento é parado com as funções do componente desegurança STO ou SS1 ou a ultrapassagem é relatada através dos dados do proces-so seguro em um controlador de segurança.Se os valores máximos e a resposta à irregularidade STO ou SSx forem excedidos, aresposta à irregularidade deve ser confirmada. Se a ultrapassagem dos valores máxi-mos for relatada ao controle seguro, não será necessário confirmar. O status das fun-ções do componente de segurança é redefinido se o valor máximo ficar abaixo, levan-do-se em consideração a histerese parametrizada (8706.57).Quando as funções do componente de segurança tiverem sido ativadas, a velocidadereal é monitorada quanto à ultrapassagem da velocidade máxima durante o tempo demonitoramento. Em seguida, a velocidade real é monitorada ao deixar a faixa entre olimite de velocidade superior e inferior. Ambos os limites de velocidade superior e in-ferior podem ser positivos e negativos.Para a função SSR, um filtro de velocidades poderá ser parametrizado. Se um filtrode velocidades for parametrizado, ele será calculado separadamente para o limite develocidade superior e inferior.
AtivaçãoNúmero de instâncias: 2A função do componente de segurança SSR pode ser selecionada através das se-guintes fontes:• F-DI (atribuição das funções)26
6313
26/P
T-BR
– 1
2/20
20
8 Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)106
• Dados de saída do processo seguro (SSR1, SSR2)• Ativação permanente
StatusO status da função do componente de segurança SSR está ativo quando a funçãoSSR tiver sido ativada e a velocidade real estiver entre os dois limites de velocidade.Se o limite de velocidade for excedido, o status da função SSR será desativado. Se avelocidade real, levando em consideração a histerese de velocidade, estiver dentrodos valores limite, o status da função do componente de segurança SSR muda nova-mente para "1". Um filtro de velocidade parametrizado atrasa a mudança de status.Se a irregularidade for confirmada na parada ou abaixo do limite de velocidade, o filtrode velocidade é reiniciado e o status muda imediatamente para "1".O status é exibido nas seguintes áreas:• Diagnóstico MOVISAFE® CS..A, status Funções de velocidade• Dados de entrada de processo seguro (SSR1, SSR2)
Resposta à irregularidadeSe um de ambos os limites de velocidade for excedido, uma das seguintes respostasà irregularidade parametrizadas poderá ser ativada:• STO• SSX 1• SSX 2• Somente F-PE
A resposta à irregularidade "F-PE" somente pode ser selecionada se um protocoloseguro for selecionado.
8.6.11 Função do componente de segurança SSM com MOVISAFE® CS..AA função SSM fornece um sinal de saída seguro nos dados do processo seguro paraindicar se a rotação do motor está abaixo de um valor máximo especificado.Para cada instância da função SSM, um filtro de velocidades poderá ser ativado. O fil-tro de velocidades integra a ultrapassagem do limite de velocidade ao longo do per-curso. Se este percurso se tornar maior que o percurso parametrizado, é enviadauma mensagem de retorno através da mensagem de status correspondente.Com o parâmetro Direção efetiva, é possível especificar para cada função SSM emqual direção (positiva, negativa ou em ambas as direções) a função SSM deve atuar.
AtivaçãoNúmero de instâncias: 4Se o valor limite não for igual a 0, a função SSM está ativa.
StatusSe os valores máximos forem excedidos, o status da função do componente de segu-rança SSM mudará para "0". Se, levando em consideração a histerese de velocidade,a velocidade real estiver abaixo do valor limite, o status da função do componente desegurança SSM muda novamente para "1". Um filtro de velocidade parametrizadoatrasa a mudança de status. Se a irregularidade for confirmada na parada ou abaixodo limite de velocidade, o filtro de velocidade é reiniciado e o status muda imediata-mente para "1".
2663
1326
/PT-
BR –
12/
2020
8Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 107
O status é exibido nas seguintes áreas:• Diagnóstico MOVISAFE® CS..A, status Funções de velocidade• Dados de entrada de processo seguros (SSM1, SSM2, SSM3, SSM4)
Resposta à irregularidadeNenhuma.
8.6.12 Função do componente de segurança SDI com MOVISAFE® CS..AA função SDI monitora o movimento no sentido de rotação bloqueado. Se a tolerânciaparametrizável for violada, a função do componente de segurança STO é ativada.A função pode ser ativada através de uma entrada digital segura F-DI via dados doprocesso seguros (SDI 1, SDI 2) ou a função pode ser permanentemente ativadaatravés da parametrização.Quando a função do componente de segurança SDI tiver sido ativada, a posição limi-te é calculada a partir da posição atual detectada pelo sistema de encoder naquelemomento e os parâmetros Tolerância e Direção de movimento permitida. Em movi-mentos na direção de movimento permitida, a posição limite é alterada, ou seja, a po-sição limite é recalculada ciclicamente a partir da posição atual e da tolerância. Issosignifica que a distância até a posição atual é no máximo a tolerância parametrizada.Em movimentos na direção de movimento bloqueada e ultrapassagem da posição li-mite, ocorre a resposta à irregularidade. A posição limite é recalculada através deuma confirmação de irregularidade após uma violação do valor máximo ou uma irre-gularidade do encoder. A posição de partida é a posição atual detectada no momentoem que a irregularidade foi confirmada. A velocidade não é monitorada pela funçãoSDI.
AtivaçãoNúmero de instâncias: 2A função do componente de segurança SDI pode ser selecionada através das seguin-tes fontes:• F-DI (atribuição das funções)• Dados de saída do processo seguro (SDI1, SDI2)• Ativação permanente
StatusSe a função do componente de segurança SDI estiver ativada e não houver movi-mento no sentido de rotação monitorado, o status da função SDI estará ativo. O sta-tus da função SDI é desativado se tiver sido detectado um movimento no sentido derotação monitorado além da tolerância parametrizada.O status da função do componente de segurança SDI é exibido nas seguintes áreas:• Diagnóstico MOVISAFE® CS..A, status Funções de posição• Dados de entrada de processo seguro (SDI1, SDI2)
Resposta à irregularidadeQuando a posição limite é excedida, a função do componente de segurança STO éativada como resposta à irregularidade sem a desaceleração da atuação do freio.
2663
1326
/PT-
BR –
12/
2020
8 Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)108
8.6.13 Função do componente de segurança SLI com MOVISAFE® CS..ACom a função do componente de segurança SLI, podem ser implementadas funçõesde posição relativas seguras. A função SLI monitora se os limites definidos são exce-didos. Os limites definidos são calculados com os ajustes dos seguintes parâmetros:• Incremento• Desaceleração a• Direção efetiva• Velocidade máxima
NOTAA ativação da função SLI e a liberação do passo SLI não devem ocorrer simultanea-mente. No controle simultâneo, o estado de retenção parametrizado não é cancela-do.
Ao ativar a função SLI, o estado de retenção parametrizado é ativado primeiro. Com oajuste "Estado de retenção STO" ou "Estado de parada SOS", o estado de retençãopoderá ser desativado através de um flanco 0 → 1 da ativação por etapas SLI e a fun-ção SLI pode monitorar os limites parametrizados. O "estado de retenção SOS" so-mente pode ser usado se a função do componente de segurança SOS tiver sido para-metrizada.Se o estado de parada for parametrizado para "Sem estado de parada", os limites pa-rametrizados serão monitorados sem ativação por etapas anterior.Os limites são calculados a partir da posição atual quando a monitoração é ativada. Acurva de monitoramento na direção efetiva é composta do incremento definido e dadesaceleração.O estado de parada é desativado e a posição limite calculada pela ativação por eta-pas SLI:• Posição limite positiva: Posição atual mais incremento• Posição limite negativa: Posição atual menos incrementoAo revogar a ativação por etapas SLI, o estado de parada é ativado imediatamente.No caso de que a ativação por etapas se repita, os limites são recalculados com basena posição atual. Após uma violação do valor máximo, a ativação por etapas SLI ou afunção SLI deve ser desativada antes da confirmação, caso contrário, a violação dovalor máximo será relatada novamente após a confirmação.
Ativação
Função do componente de segurança SLI
Número de instâncias: 2A função do componente de segurança SLI pode ser selecionada através das seguin-tes fontes:• F-DI (atribuição das funções)• Dados de saída do processo seguro (SLI1, SLI2)• Estado final SSx1, SSx2
Liberação de passo SLI
Número de instâncias: 1
2663
1326
/PT-
BR –
12/
2020
8Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 109
A ativação por etapas SLI não se limita no tempo e é acionada através de um flanco 0→ 1 em uma das seguintes fontes:• F-DI (atribuição das funções)• Dados de saída de processo seguro (ativação por etapas SLI)
StatusO status da função do componente de segurança SLI é exibido nas seguintes áreas:• Diagnóstico MOVISAFE® CS..A, Status Funções de aceleração• Dados de saída de processo seguro (SLI1, SLI2)O status da função do componente de segurança SLI é ativado assim que a funçãodo componente de segurança é ativada e nenhum valor máximo tiver sido excedido.No estado de retenção, os bits de status das funções do componente de segurançaSTO e SOS se comportam conforme descrito nas funções do componente de segu-rança.
Resposta à irregularidadeComo resposta à irregularidade, a função do componente de segurança STO é ativa-da sem desaceleração da atuação do freio em um dos seguintes casos:• Se uma das posições limite for excedida.• Se a distância de frenagem na direção do movimento na direção efetiva parame-
trizada for maior que a distância até a posição limite.
8.6.14 Modo silencioso Irregularidade do encoder
AVISOA função ativa "Modo silencioso Irregularidade do encoder" desativa as funções docomponente de segurança dependentes do encoder (exceto STO). Isso pode fazercom que o sistema seja iniciado imediatamente.Morte ou ferimentos graves.• Antes de ativar a função "Modo silencioso Irregularidade do encoder", medidas
organizacionais devem ser tomadas pelo usuário para proteger as pessoas e amáquina.
A função "Modo silencioso Irregularidade do encoder" pode ser ativada através deuma entrada digital segura F-DI, através dos dados de saída de processo seguro (F-PA) ou iniciando o modo de emergência com o controle manual. A função "Modo si-lencioso Irregularidade do encoder" ativada é sinalizada no LED F-ERR piscandorápido em amarelo. A função "Modo silencioso Irregularidade do encoder" tem os se-guintes efeitos:• A abertura da saída digital interna segura F-DO_STO é impedida devido à respos-
ta à irregularidade do encoder.• As respostas à irregularidade de todas as funções do componente de segurança
são evitadas.• O bit de dados do processo seguro F-PE_Muting_Enc-Err é definido.• O bit de dados do processo seguro F-PE-ErrorState permanece definido.
2663
1326
/PT-
BR –
12/
2020
8 Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)110
• O código de irregularidade continuará sendo exibido.• A ativação da função do componente de segurança STO continua sendo possível
sem restrições. Todas as outras funções do componente de segurança se tornamineficazes.
A função "Modo silencioso Irregularidade do encoder" é automaticamente terminadanos seguintes casos:• A outra irregularidade é detectada.• Uma irregularidade é confirmada.• 5 minutos após a ativação.Se a função "Modo silencioso Irregularidade do encoder" tiver sido desativada auto-maticamente, todas as fontes devem primeiro revogar a ativação antes de reativá-la.
8.6.15 Modo silencioso dos dados de saída do processo seguro (modo silencioso F-PA)
AVISOA função ativa "Modo silencioso F‑PA" desativa as funções do componente de se-gurança dependentes do encoder (exceto STO). Isso pode fazer com que o sistemaseja iniciado imediatamente.Morte ou ferimentos graves.• Antes de ativar a função "Modo silencioso F-PA", o usuário deve tomar medidas
organizacionais para proteger as pessoas e a máquina.
A função "Modo silencioso dos dados de saída de processo seguro" é ativada atravésde um flanco 0 → 1 em uma entrada digital segura F-DI ou iniciando o modo de emer-gência com o controle manual. A função "Modo silencioso F-PA" ativada é sinalizadano LED F-ERR piscando rápido em amarelo. A função "Modo silencioso F‑PA" tem osseguintes efeitos:• A abertura da saída digital interna segura F-DO_STO é impedida devido aos valo-
res de substituição dos dados F-PA.• As respostas à irregularidade de todas as funções do componente de segurança
são evitadas.• O bit Modo silencioso Irregularidade do encoder é definido nos dados de entrada
de processo seguro.• A ativação da função do componente de segurança STO continua sendo possível
sem restrições através de uma entrada digital segura F-DI.A função "Modo silencioso F‑PA" é automaticamente terminada nos seguintes casos:• A outra irregularidade é detectada.• Uma irregularidade é confirmada.• 5 minutos após a ativação.• Interrupção de conexão ao controle manual se a função "Modo silencioso F-PA" ti-
ver sido ativada através do mesmo.Após a desativação automática da função "Modo silencioso F-PA", todas as fontesdevem revogar a ativação antes de reativá-la.
8.6.16 Modo de testeCom o modo de teste ativo, a violação do valor máximo da função do componente desegurança SS1, SS2 e SOS pode ser testada.
2663
1326
/PT-
BR –
12/
2020
8Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 111
O modo de teste impede o controle da unidade básica (seleção FCB).O modo de teste é ativado através de um flanco de ascendente (0 → 1) em uma en-trada digital segura ou através dos dados de saída do processo seguro (F-PA).O status do modo de teste é sinalizado através dos dados do processo seguro (bit dedados do processo: modo de teste ativo), na ferramenta de parametrização "AssistCS.." e através da indicação LED.O modo de teste é finalizado automaticamente nos seguintes casos:• Durante a parametrização da placa de segurança.• Através da abertura da saída digital interna segura F-DO_STO (por ex., resposta
à irregularidade, violação do valor máximo, ativação da função do componente desegurança STO).
• 5 minutos após a ativação.
8.6.17 Função do componente de segurança SCA com MOVISAFE® CSA31AA função do componente de segurança SCA fornece um sinal de saída seguro nosdados do processo seguro para indicar se a posição está dentro da faixa de posiçãodefinida.Para ativar a monitoração SLS automática dentro da faixa de posição, uma das 4 ins-tâncias SLS pode ser atribuída a cada instância da função SCA. A instância SLS utili-zada deve ser parametrizada para isso. O parâmetro Histerese de posição evita a co-mutação não intencional dos bits de status SCA se o acionamento parar na posiçãoinicial ou final de uma faixa de posição. A placa de segurança MOVISAFE® CSA31Asomente altera o bit de status SCA após a histerese de posição. A histerese de posi-ção é efetiva ao entrar na faixa de posição e o status da função SCA é alterado pelahisterese de posição. Ao sair da faixa de posição, a histerese de posição somente éefetiva após uma inversão de sentido. A distância entre a posição superior e inferiordo came deve ser duas vezes maior o valor do parâmetro Histerese de posição.
AtivaçãoNúmero de instâncias: 16A função SCA está permanentemente ativa se nenhum protocolo for selecionado paraa comunicação F.Ao selecionar um tipo de protocolo (PROFIsafe, FSoE, ISOFAST®) todas as instân-cias SCA podem ser liberadas com o bit "SCA = 0".
StatusO status da função do componente de segurança SCA é exibido nas seguintes áreas:• Diagnóstico MOVISAFE® CS..A, status Funções de posição• Dados de entrada de processo seguros (SCA1, SCA2, SCA3, SCA4) nas varian-
tes de perfil "Technology" e "System".• Dados de entrada de processo seguros, valor de processo 1 (status SCA) na vari-
ante de perfil "System".O status da função do componente de segurança tem o valor "1" nos seguintes ca-sos:• A função do componente de segurança foi ativada• O sistema do encoder está referenciado e livre de irregularidades• A posição absoluta está na faixa parametrizadaEm todos os outros casos, o status tem o valor "0".
2663
1326
/PT-
BR –
12/
2020
8 Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)112
8.6.18 Função do componente de segurança SLP com MOVISAFE® CSA31ACom a função do componente de segurança SLP, podem ser implementadas funçõesde posição absolutas seguras. A função SLP monitora se as posições limite definidassão excedidas. Os posições limite definidas são calculadas com os ajustes dos se-guintes parâmetros:• Posição limite inferior s1
• Posição limite superior s2
• Desaceleração a• Monitoramento de rampa
AtivaçãoNúmero de instâncias: 2A função do componente de segurança SLP pode ser selecionada através das se-guintes fontes:• F-DI (atribuição das funções)• Dados de saída de processo seguro (SLP1, SLP2)
StatusSe a função do componente de segurança SLP estiver ativada e o sistema de enco-der estiver referenciado e sem irregularidades, o status da função SLP está ativo. Seum movimento for detectado além de uma das duas posições limite parametrizadas, ostatus da função do componente de segurança SLP é desativado.O status da função do componente de segurança SLP é exibido nas seguintes áreas:• Diagnóstico MOVISAFE® CS..A, status Funções de posição• Dados de entrada de processo seguro (SLP1, SLP2)
Resposta à irregularidadeQuando a posição limite incluindo a distância de desaceleração for excedida, a fun-ção do componente de segurança STO é ativada sem tempo de atuação do freio co-mo resposta à irregularidade.
Informações
• Quando a posição limite SLP for excedida, a função do componente de segurançaSTO é selecionada, o que significa que o acionamento não pode mais produzirnenhum torque. Um eixo sujeito à gravidade irá cair se não houver medidas adici-onais.
• Quando a posição limite SLP for excedida, todas as saídas seguras parametriza-das no SBC também são abertas. Aplicam-se os freios lá conectados. Um eixo su-jeito à gravidade pode cair bruscamente no tempo de atuação do freio necessáriopara isso.
• Sem monitoramento de rampa, a função SLP somente seleciona a função docomponente de segurança STO quando o limite de posição é excedido. Como otempo de atuação do freio ainda é necessário para o sistema de frenagem até quea desaceleração ocorra, é necessário manter uma área de segurança suficiente-mente grande atrás dos limites de posição.
2663
1326
/PT-
BR –
12/
2020
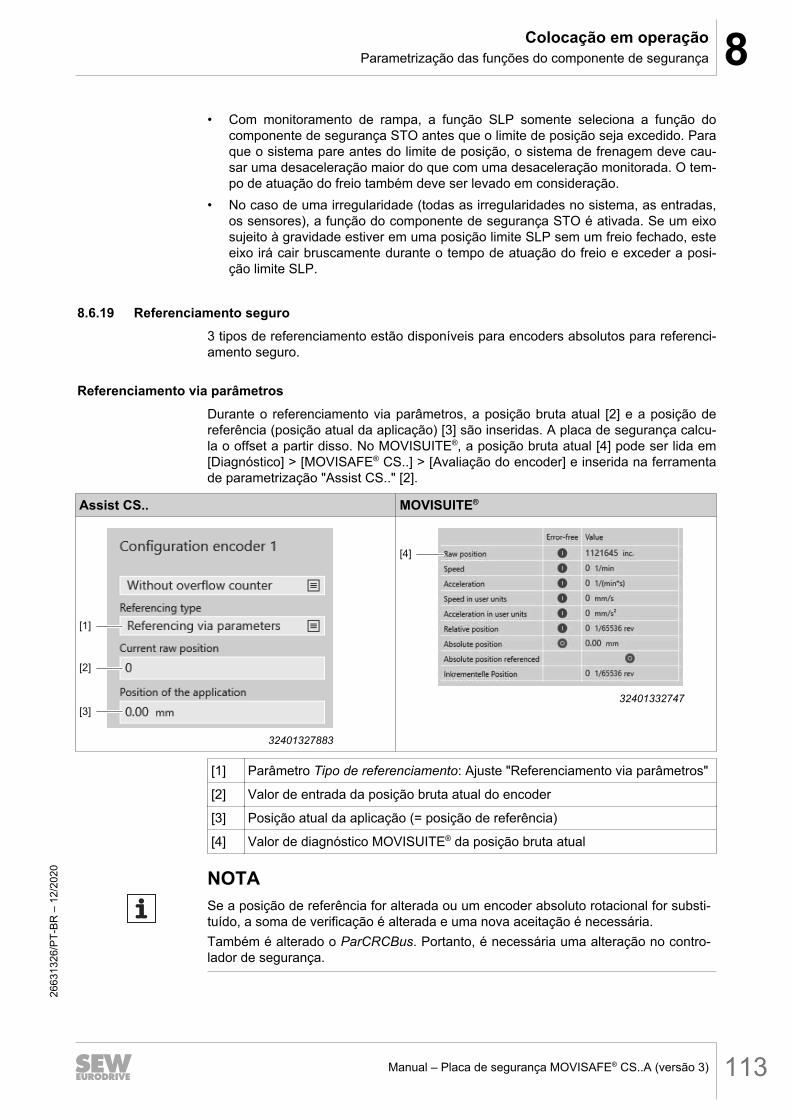
8Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 113
• Com monitoramento de rampa, a função SLP somente seleciona a função docomponente de segurança STO antes que o limite de posição seja excedido. Paraque o sistema pare antes do limite de posição, o sistema de frenagem deve cau-sar uma desaceleração maior do que com uma desaceleração monitorada. O tem-po de atuação do freio também deve ser levado em consideração.
• No caso de uma irregularidade (todas as irregularidades no sistema, as entradas,os sensores), a função do componente de segurança STO é ativada. Se um eixosujeito à gravidade estiver em uma posição limite SLP sem um freio fechado, esteeixo irá cair bruscamente durante o tempo de atuação do freio e exceder a posi-ção limite SLP.
8.6.19 Referenciamento seguro3 tipos de referenciamento estão disponíveis para encoders absolutos para referenci-amento seguro.
Referenciamento via parâmetrosDurante o referenciamento via parâmetros, a posição bruta atual [2] e a posição dereferência (posição atual da aplicação) [3] são inseridas. A placa de segurança calcu-la o offset a partir disso. No MOVISUITE®, a posição bruta atual [4] pode ser lida em[Diagnóstico] > [MOVISAFE® CS..] > [Avaliação do encoder] e inserida na ferramentade parametrização "Assist CS.." [2].
Assist CS.. MOVISUITE®
[1]
[2]
[3]
32401327883
[4]
32401332747
[1] Parâmetro Tipo de referenciamento: Ajuste "Referenciamento via parâmetros"
[2] Valor de entrada da posição bruta atual do encoder
[3] Posição atual da aplicação (= posição de referência)
[4] Valor de diagnóstico MOVISUITE® da posição bruta atual
NOTASe a posição de referência for alterada ou um encoder absoluto rotacional for substi-tuído, a soma de verificação é alterada e uma nova aceitação é necessária.Também é alterado o ParCRCBus. Portanto, é necessária uma alteração no contro-lador de segurança.
2663
1326
/PT-
BR –
12/
2020
8 Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)114
Referenciamento diretoNo referenciamento direto, a posição de referência é especificada na ferramenta deparametrização "Assist CS..". Ao ativar (flanco 0 → 1) do referenciamento direto, ooffset é calculado.Durante o referenciamento, a posição não deve se mover mais do que uma tolerânciaparametrizada.A função do referenciamento direto pode ser selecionada a partir das seguintes fon-tes:• F-DI (atribuição das funções)• Dados de saída de processo seguro (referenciamento)
Referenciamento nos camesDurante o referenciamento nos cames, o offset é redefinido quando uma chave de re-ferência é excedida. O came pode estar conectado através de entradas digitais segu-ras ou disponibilizado como bit nos dados de saída de processo do CSA31A.O referenciamento deve sempre ser liberado por meio de uma entrada digital seguraou por meio dos dados de saída de processo seguros. A utilização de uma entrada di-gital segura tem prioridade sobre o bit por meio dos dados de saída de processo, ouseja, se pelo menos uma entrada digital segura está atribuída à função "Referencia-mento", então não há referenciamento ao bit dos dados de saída de processo. Se 2cames ou uma chave de referência redundante forem usados, 2 entradas digitais se-guras devem ser parametrizadas como canal único e a função "Cames de referência"atribuída a ambos. O uso de chaves de referência de comutação antivalente não estápermitido. As chaves de referência devem ser concebidas como contatos normalmen-te abertos.Os seguintes parâmetros são relevantes para referenciamento:• Offset de referência• Velocidade máxima• Fonte dos cames• Tolerância máxima com 2 cames• Direção de movimentoO referenciamento seguro deve ser iniciado a partir da área não segura. No início oudurante o movimento, o referenciamento deve ser ativado por meio do bit "Referenci-amento" ou pela entrada digital segura com a atribuição de funções "Referenciamen-to".Durante o referenciamento, o came de referência deve ser ultrapassado especifica-mente com a direção de movimento parametrizada. Ao mesmo tempo, a velocidademáxima parametrizada não deve ser excedida. Ao deixar o came de referência na di-reção de movimento parametrizada, detecta-se um flanco ascendente que realiza oreferenciamento e define o bit "Referenciado".Se o came de referência contra a direção de movimento parametrizada for ultrapassa-do, o referenciamento é cancelado com uma irregularidade. Particularmente com 2cames de referência, deve-se garantir que uma saída do came de referência muda adireção do movimento depois que ambos os cames transmitem um sinal baixo.Para o encoder 1, encoder 2 ou encoder 3, a posição é definida para o offset de refe-rência no qual o tipo de referenciamento "Referenciamento desacoplado" é parametri-zado.
2663
1326
/PT-
BR –
12/
2020
8Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 115
Precisão
• Ao usar cames de referência em entradas digitais seguras, a precisão da posiçãoé limitada ao seguinte valor:Tempo de filtro de entrada (8704.2) + 6.35 ms × Velocidade máxima Referencia-mento (8707.56) + precisão específica do encoder
• Ao usar cames F-PA, a precisão da posição é limitada ao seguinte valor:3 ms × Velocidade máxima Referenciamento (8707.56) + precisão específica doencoder
Comprimento mínimo do came
• Se um came mecânico for ultrapassado, o comprimento de um came deve sermaior que o valor máximo a seguir:T_Processamento de entrada_F-DIx_Actval × Velocidade máxima Referencia-mento (8707.56) + precisão específica do encoder + 2 × histerese de posição(8707.20)
• Se houver uma inversão do sentido de rotação no came, ele deve ser percorridocom pelo menos a seguinte distância:Valor máximo de: (0.5 × T_Processamento de entrada_F-DIx_Actval × Velocidademáxima Referenciamento (8707.56) + precisão específica do encoder) + histeresede posição (8707.20)
• Ao usar o sinal "F-PA_Cames de referência", o sinal deve estar ativo em pelo me-nos um telegrama F-PA.
8.6.20 Função "Ajuste de escorregamento"A função "Ajuste de escorregamento" está integrada somente no MOVISAFE®
CSA31A. A função "Ajuste de escorregamento" é usada para o ajuste automático deum sistema de medição de posição incremental sujeito a escorregamento em uma es-trutura relacionada à segurança com um segundo sistema de medição de posição ab-soluta. Um exemplo é um veículo conduzido sobre trilhos que é acionado por meio doacoplamento roda/trilho (conexão friccional, sujeito a escorregamento) e posicionadopor meio de um sistema de medição de posição sem escorregamento.Devido à avaliação paralela do sistema de medição de posição montado no comandodo motor (incremental) e do segundo sistema de medição de posição absoluta semescorregamento, a medição de posição diverge inevitavelmente. A função "Ajuste deescorregamento" corrige esse escorregamento definindo o valor incremental em cer-tas posições para a posição física real. Para este efeito, é necessário um came (porex., chave de comutação) para cada posição de ajuste definida. A chave de posiçãodo hardware (contato normalmente fechado) é lida na entrada digital segura F-DI doCSA31A, e, na atribuição de funções, a função "Ajuste de escorregamento – Cames"é atribuída à entrada digital segura F-DI. Somente sensores de canal único são per-mitidos.Ao ultrapassar o came, a função "Ajuste de escorregamento" avalia o valor da posi-ção atual no flanco descendente em conjunto com a entrada correspondente em umatabela de posição. Se o valor da posição atual estiver na faixa de tolerância especifi-cada para uma posição do came correspondente, e a velocidade atual for menor quea velocidade máxima parametrizada, o sistema do encoder com escorregamento écomparado com o flanco ascendente. Para tal, o valor da posição atual é substituídopelo segundo valor da posição.
2663
1326
/PT-
BR –
12/
2020
8 Colocação em operaçãoParametrização das funções do componente de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)116
Para utilizar a função "Ajuste de escorregamento", as posições do came devem estarparametrizadas na ferramenta de parametrização "Assist CS..". É necessário inserir 2valores da posição para cada posição da chave a ser ajustada.
Informações• Para gerar o valor do processo, o encoder 1 com escorregamento deve estar defi-
nido como "Valor de comparação" e o encoder 2 sem deslizamento como "Valorde processo".
• Um ajuste de escorregamento somente ocorre quando a posição parametrizada éacionada abaixo da velocidade máxima configurada. Se a posição for acionada auma velocidade acima do limite de velocidade, não ocorre nenhum ajuste de es-corregamento.
• Para cada posição da chave a ser ajustada, devem ser parametrizadas 2 posições(esquerda e direita). Os valores devem ser verificados com um procedimento ade-quado em relação aos valores reais do sistema real.
• É necessário pelo menos um came (por ex., chave de comutação) para um ajustedo encoder ativo. O came é ultrapassado em uma direção de movimento; não de-ve ocorrer inversão do sentido de rotação no came. O ajuste de escorregamentoocorre no flanco descendente. O caminho desde o último ajuste de escorrega-mento não pode ser maior que a distância máxima após o último ajuste de escor-regamento.
• A distância entre 2 cames deve ser dez vezes maior que a posição de tolerânciamáxima da tolerância do encoder.
• A distância entre 2 cames deve ser dez vezes maior que o comprimento do came.• Os cames disponíveis fisicamente devem ser usados para gerar o estado "Ajuste
de escorregamento do came" do bit de dados do processo seguro no controladorde segurança. Não é permitido usar apenas os valores de processo da placa desegurança CSA31A, por ex. da posição segura, para criar o status do bit de dadosdo processo "Ajuste de escorregamento do came".
Comprimento mínimo do cameO comprimento mínimo do came resulta do tempo de processamento do sinal tSig e davelocidade máxima com que o came é ultrapassado.O tempo de processamento do sinal é calculado da seguinte forma:tSig = filtro F_DI + 6 ms
tSig = Tempo de processamento do sinal [tSig] = s
Filtro F_DI = Parâmetro Tempo de filtro de entrada (8704.2) [Filtro F_DI] = s
O comprimento mínimo do came é calculado da seguinte forma:lN_min = 2 × tSig × vN_max
lN_min = Comprimento mínimo do came [lN_min] = mm
tSig = Tempo de processamento do sinal [tSig] = s
vN_max = Velocidade máxima com a qual o came é ultrapassado [vN_max] = m s-1
Com o valor padrão do tempo de filtro de entrada (8704.2) de 25 ms e uma velocida-de máxima de 1000 mm s-1, daí resulta em um comprimento mínimo do came de62 mm.
2663
1326
/PT-
BR –
12/
2020
8Colocação em operaçãoColocação em operação da placa de segurança no protocolo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 117
NOTASe a precisão de posicionamento for maior que a metade do comprimento mínimo docame, este deve ser aumentado em um valor duas vezes maior que a precisão deposicionamento.A tolerância de posição deve ser parametrizada em um valor maior do que a preci-são de posicionamento do encoder 2.
Parâmetros para a função "Ajuste de escorregamento"• Número de cames: 1 até 10• Resposta à irregularidade: STO/SSx1/SSx2• Velocidade máxima
Velocidade máxima em que um ajuste de escorregamento ainda é executado.• Tolerância de posição
A tolerância de posição indica o desvio tolerado entre o valor da posição do enco-der 2 e a posição do came definida. A tolerância de posição deve ser maior doque a irregularidade de posição do encoder 2.
• Posição esquerda dos cames 1 a 10 (nas unidades do usuário Posição)• Posição direita dos cames 1 a 10 (nas unidades do usuário Posição)• Trajeto máximo desde o último ajuste de escorregamento
8.6.21 Teste de frenagem SBTInformações detalhadas sobre a função de teste de frenagem SBT podem ser encon-tradas no manual "MOVIDRIVE® modular/system/technology Função de diagnósticode teste de frenagem com MOVISAFE® CS.A".
NOTAO teste de frenagem SBT utiliza apenas o encoder 1.
8.7 Colocação em operação da placa de segurança no protocolo F
8.7.1 Requisitos para comunicação FOs requisitos para a segurança de TI em relação aos protocolos F devem ser verifica-dos de acordo com a norma EN 61508-1, capítulo "Análise de perigos e riscos".
NOTAAntes de alterar o protocolo F ajustado na placa de segurança CS..A, é necessáriodesconectar fisicamente a conexão ao mestre F.
2663
1326
/PT-
BR –
12/
2020
8 Colocação em operaçãoColocação em operação da placa de segurança no protocolo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)118
8.7.2 Protocolo PROFIsafe
NOTAPara controlar funções à prova de irregularidades e avaliar as mensagens de retornoda placa de segurança CS..A através do PROFIsafe, a atribuição dos bits individuaisno protocolo F deve ser levada em consideração.
Pré-requisitos• As placas de segurança CS..A suportam as versões 2.4 e 2.6 do PROFIsafe.• O F-CLP de nível superior deve suportar o mecanismo CRC iPar.• Para uma colocação em operação bem-sucedida, é necessário a ferramenta de
parametrização "Assist CS..".• Requisitos adicionais ao usar o MOVISAFE® CS..A com conexão fieldbus
PROFIsafe através de PROFINET:– TIA-Portal com opcional STEP7 Safety (para controles da empresa Siemens)– Arquivo de descrição da unidade de MOVIDRIVE® technology ou do MOVI-
C® CONTROLLER utilizado.Download em www.sew‑eurodrive.com. Sempre utilizar o arquivo de descriçãoda unidade.
Ajustes na placa de segurançaAlém da parametrização das funções do componente de segurança, o protocolo desegurança correspondente e o endereço PROFIsafe devem ser definidos durante acolocação em operação.
Ajuste do protocolo de segurança
A placa de segurança CS..A suporta vários protocolos de segurança. Para tal, seleci-onar o ajuste "PROFIsafe" na ferramenta de parametrização "Assist CS.." em [Comu-nicação F] > [Configuração].
Ajuste do endereço de destino
O endereço de destino deve corresponder ao endereço do escravo ajustado no mes-tre PROFIsafe. Inserir o endereço de destino correto no item do menu [ComunicaçãoF] > [Configuração] > [PROFIsafe]. Os endereços de destino utilizados devem ser úni-cos na rede fieldbus.
Configuração do tipo de endereço
Com a seleção do tipo de endereço 1 ou 2, define-se se a atribuição do escravoPROFIsafe ocorre exclusivamente através do endereço destino ou se o endereço deorigem também é utilizado
2663
1326
/PT-
BR –
12/
2020
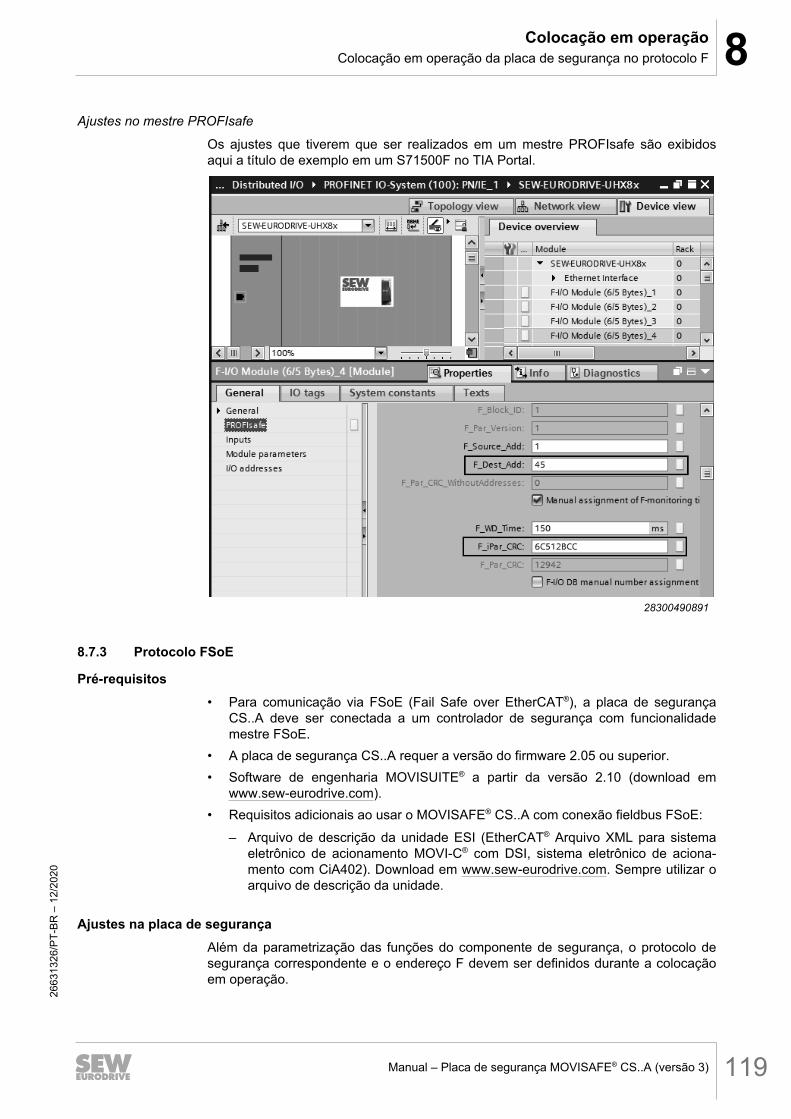
8Colocação em operaçãoColocação em operação da placa de segurança no protocolo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 119
Ajustes no mestre PROFIsafe
Os ajustes que tiverem que ser realizados em um mestre PROFIsafe são exibidosaqui a título de exemplo em um S71500F no TIA Portal.
28300490891
8.7.3 Protocolo FSoE
Pré-requisitos• Para comunicação via FSoE (Fail Safe over EtherCAT®), a placa de segurança
CS..A deve ser conectada a um controlador de segurança com funcionalidademestre FSoE.
• A placa de segurança CS..A requer a versão do firmware 2.05 ou superior.• Software de engenharia MOVISUITE® a partir da versão 2.10 (download em
www.sew‑eurodrive.com).• Requisitos adicionais ao usar o MOVISAFE® CS..A com conexão fieldbus FSoE:
– Arquivo de descrição da unidade ESI (EtherCAT® Arquivo XML para sistemaeletrônico de acionamento MOVI-C® com DSI, sistema eletrônico de aciona-mento com CiA402). Download em www.sew‑eurodrive.com. Sempre utilizar oarquivo de descrição da unidade.
Ajustes na placa de segurançaAlém da parametrização das funções do componente de segurança, o protocolo desegurança correspondente e o endereço F devem ser definidos durante a colocaçãoem operação.
2663
1326
/PT-
BR –
12/
2020
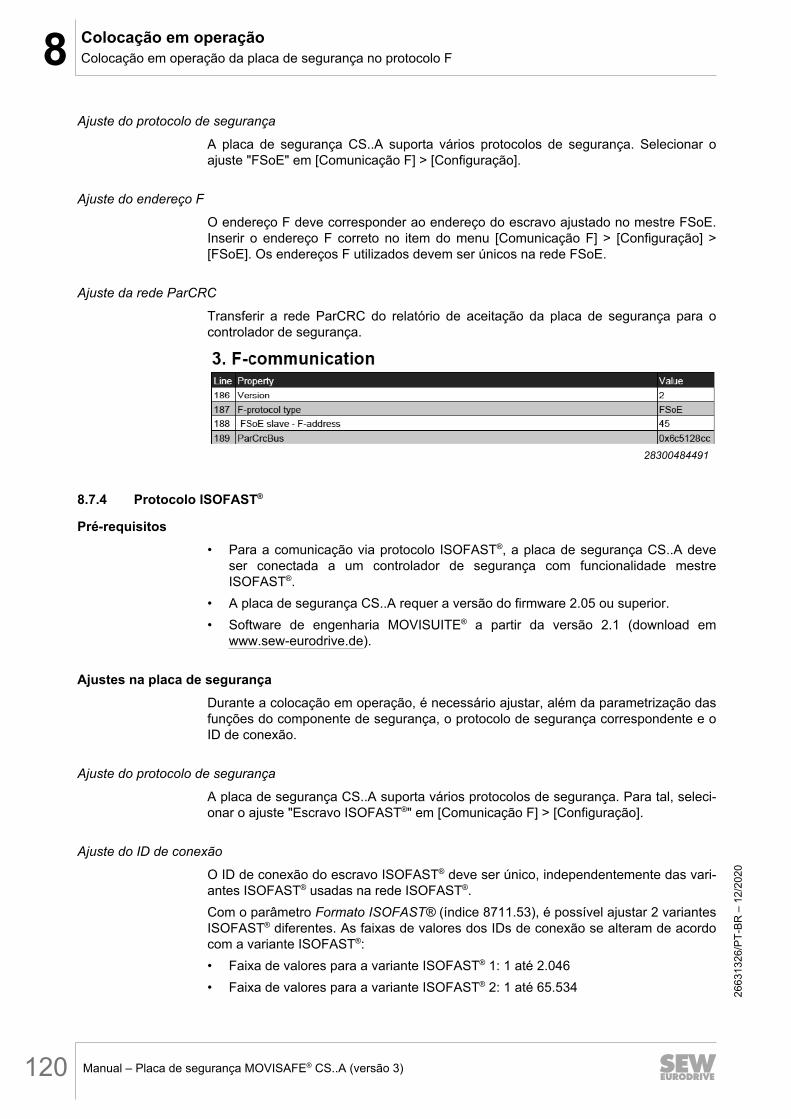
8 Colocação em operaçãoColocação em operação da placa de segurança no protocolo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)120
Ajuste do protocolo de segurança
A placa de segurança CS..A suporta vários protocolos de segurança. Selecionar oajuste "FSoE" em [Comunicação F] > [Configuração].
Ajuste do endereço F
O endereço F deve corresponder ao endereço do escravo ajustado no mestre FSoE.Inserir o endereço F correto no item do menu [Comunicação F] > [Configuração] >[FSoE]. Os endereços F utilizados devem ser únicos na rede FSoE.
Ajuste da rede ParCRC
Transferir a rede ParCRC do relatório de aceitação da placa de segurança para ocontrolador de segurança.
28300484491
8.7.4 Protocolo ISOFAST®
Pré-requisitos• Para a comunicação via protocolo ISOFAST®, a placa de segurança CS..A deve
ser conectada a um controlador de segurança com funcionalidade mestreISOFAST®.
• A placa de segurança CS..A requer a versão do firmware 2.05 ou superior.• Software de engenharia MOVISUITE® a partir da versão 2.1 (download em
www.sew-eurodrive.de).
Ajustes na placa de segurançaDurante a colocação em operação, é necessário ajustar, além da parametrização dasfunções do componente de segurança, o protocolo de segurança correspondente e oID de conexão.
Ajuste do protocolo de segurança
A placa de segurança CS..A suporta vários protocolos de segurança. Para tal, seleci-onar o ajuste "Escravo ISOFAST®" em [Comunicação F] > [Configuração].
Ajuste do ID de conexão
O ID de conexão do escravo ISOFAST® deve ser único, independentemente das vari-antes ISOFAST® usadas na rede ISOFAST®.Com o parâmetro Formato ISOFAST® (índice 8711.53), é possível ajustar 2 variantesISOFAST® diferentes. As faixas de valores dos IDs de conexão se alteram de acordocom a variante ISOFAST®:• Faixa de valores para a variante ISOFAST® 1: 1 até 2.046• Faixa de valores para a variante ISOFAST® 2: 1 até 65.534 26
6313
26/P
T-BR
– 1
2/20
20
8Colocação em operaçãoEstados operacionais
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 121
8.8 Estados operacionaisA placa de segurança MOVISAFE® CS..A distingue entre os seguintes estados opera-cionais:• Operação• Parametrização• Estado seguro após uma irregularidade crítica
8.8.1 Estado operacional OperaçãoNo estado operacional "Operação", as funções do componente de segurança selecio-nadas são executadas de acordo com a parametrização (ver capítulo "Funções docomponente de segurança"). As funções do componente de segurança são selecio-nadas através das entradas digitais seguras ou através dos dados do processo F. Assaídas digitais seguras externas podem ser controladas diretamente através dos da-dos do processo F, se nenhuma função tiver sido atribuída às saídas digitais segurasna atribuição das funções.
8.8.2 Estado operacional ParametrizaçãoNo estado operacional "Parametrização", a placa de segurança MOVISAFE® CS..Aestá no estado seguro. Neste estado, o MOVISAFE® CS..A pode ser parametrizado.Se ocorrer uma irregularidade durante a parametrização, por ex., a violação de umaregra de plausibilidade, o MOVISAFE® CS..A permanece no estado operacional "Pa-rametrização".
8.8.3 Estado operacional Estado seguro após uma irregularidade críticaNo estado operacional "Estado seguro", não ocorre nenhuma comunicação de dadosdo processo F. Todas as entradas e saídas digitais seguras são desligadas. O estadooperacional "Estado seguro" somente pode ser corrigido desligando e religando-o.
8.9 Aceitação relacionada com a tecnologia de segurança
PERIGOO funcionamento adequado das funções do componente de segurança não é ga-rantido sem a aceitação relacionada com a tecnologia de segurança.Morte ou ferimentos graves.• Verificar cada função do componente de segurança individual.• Um relatório de aceitação individual só pode ser elaborado se o sistema estiver
parado.
Para garantir que as funções do componente de segurança estejam corretamente pa-rametrizadas, é necessário realizar uma verificação e documentação dos parâmetrosapós a colocação em operação e a parametrização. Esta ação é suportada pela ferra-menta "Assist CS.." integrada no MOVISUITE® na forma de um relatório de aceitação.A criação do relatório de aceitação somente é possível se a parametrização for válida.Se a parametrização for inválida, a criação do relatório de aceitação é rejeitada.
2663
1326
/PT-
BR –
12/
2020

8 Colocação em operaçãoAceitação relacionada com a tecnologia de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)122
O conceito de segurança se baseia nos seguintes pré-requisitos básicos. Os parâme-tros armazenados na memória flash da placa de segurança não podem ser alterados.Testes online e as respectivas assinaturas asseguram isso em caso de implementa-ção de medidas básicas no componente. No entanto, a configuração do módulo nãopode ser avaliada. Isto se aplica à parametrização das entradas e saídas seguras,bem como aos valores máximos das funções do componente de segurança. A verifi-cação é realizada com o relatório de aceitação.Para funções do componente de segurança não utilizadas, é suficiente verificar se aliberação está parametrizada para "Não".
8.9.1 ProcedimentoApós a colocação em operação bem-sucedida, é necessário confirmar que os dadosdo relatório de aceitação correspondem aos parâmetros na placa de segurança e aosrequisitos. Os valores parametrizados para as unidades do usuário, sensores e fun-ções de monitoração devem ser verificados e protocolados individualmente. Isso podeser realizado com o auxílio de testes de funcionamento. É necessário verificar todosos valores máximos da placa de segurança, por ex., excedendo cada valor máximo edepois iniciando o estado definido (estado seguro = STO + freio sem corrente). Paratal, pode ser necessário levar esse aspecto em conta no comando da máquina e dosistema.
Realizar aceitação simples
ü A unidade usada é uma unidade SI (por ex., m, mm)1. Criar o relatório de aceitação.2. Verificar os valores máximos no relatório para irregularidades de digitação ou
transmissão.3. Verificar a correta criação dos valores da posição.4. Verificar se os valores de velocidade e aceleração foram criados corretamente.5. Verificar a instalação das entradas e saídas.6. Selecionar todas as funções de segurança parametrizadas uma vez por meio das
entradas digitais e/ou por meio do bus de segurança. Utilizar o status do CSA31Apara verificar se a função de segurança correspondente foi selecionada. Na fun-ção STO, verificar também o LED e a indicação de 7 segmentos no conversor e aaplicação do freio.
NOTAUm teste de injeção de irregularidade adicional não é necessário. Isso significa quenão há necessidade de testar explicitamente se, por ex., uma função SLS é aciona-da quando o valor máximo configurado é excedido.
Procedimento para aceitação da posiçãoPara aceitar a resolução correta do encoder e convertê-la em unidades do usuário,proceder da seguinte forma:1. Definir um ponto de partida para um movimento, por ex. um ponto de referência.2. Marcar o ponto de partida.3. Ler as posições dos encoders usados no MOVISUITE® na caixa de diálogo
[Diagnóstico] > [MOVISAFE CS..] > [Encoder] e registrá-las.4. Deslocar por um trecho definido (por ex., 5 m).
2663
1326
/PT-
BR –
12/
2020
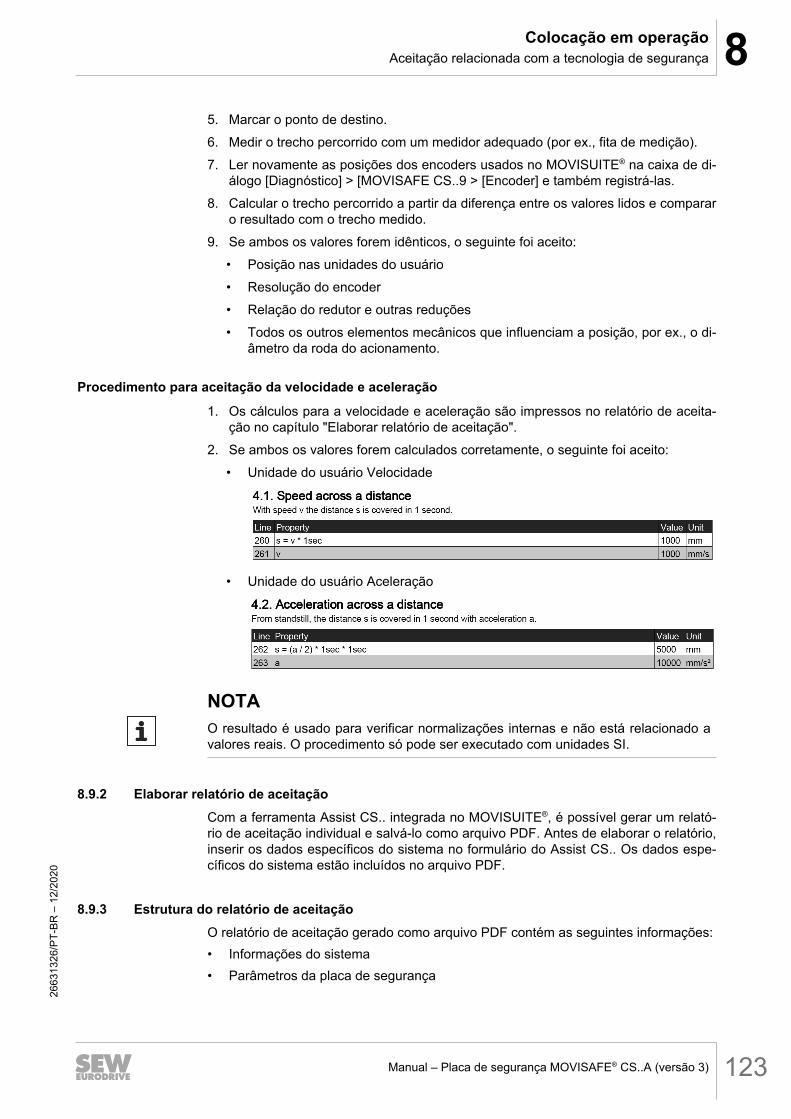
8Colocação em operaçãoAceitação relacionada com a tecnologia de segurança
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 123
5. Marcar o ponto de destino.6. Medir o trecho percorrido com um medidor adequado (por ex., fita de medição).7. Ler novamente as posições dos encoders usados no MOVISUITE® na caixa de di-
álogo [Diagnóstico] > [MOVISAFE CS..9 > [Encoder] e também registrá-las.8. Calcular o trecho percorrido a partir da diferença entre os valores lidos e comparar
o resultado com o trecho medido.9. Se ambos os valores forem idênticos, o seguinte foi aceito:
• Posição nas unidades do usuário• Resolução do encoder• Relação do redutor e outras reduções• Todos os outros elementos mecânicos que influenciam a posição, por ex., o di-
âmetro da roda do acionamento.
Procedimento para aceitação da velocidade e aceleração
1. Os cálculos para a velocidade e aceleração são impressos no relatório de aceita-ção no capítulo "Elaborar relatório de aceitação".
2. Se ambos os valores forem calculados corretamente, o seguinte foi aceito:• Unidade do usuário Velocidade
• Unidade do usuário Aceleração
NOTAO resultado é usado para verificar normalizações internas e não está relacionado avalores reais. O procedimento só pode ser executado com unidades SI.
8.9.2 Elaborar relatório de aceitaçãoCom a ferramenta Assist CS.. integrada no MOVISUITE®, é possível gerar um relató-rio de aceitação individual e salvá-lo como arquivo PDF. Antes de elaborar o relatório,inserir os dados específicos do sistema no formulário do Assist CS.. Os dados espe-cíficos do sistema estão incluídos no arquivo PDF.
8.9.3 Estrutura do relatório de aceitaçãoO relatório de aceitação gerado como arquivo PDF contém as seguintes informações:• Informações do sistema• Parâmetros da placa de segurança
2663
1326
/PT-
BR –
12/
2020
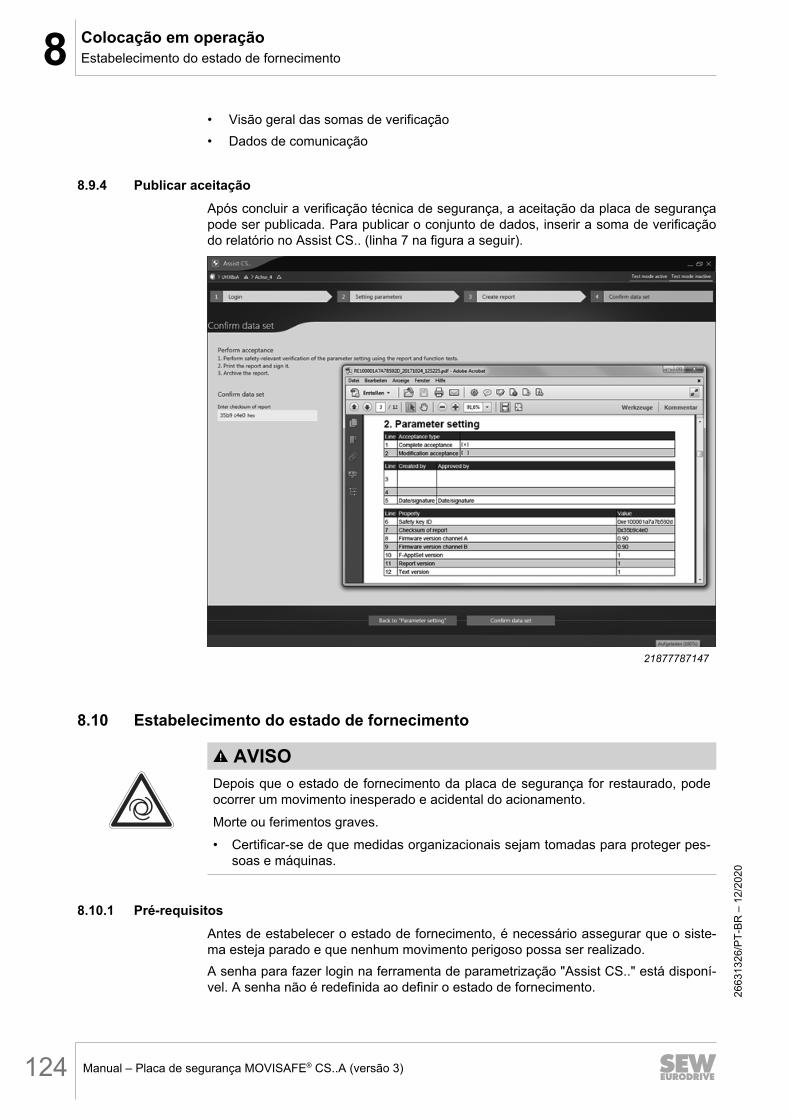
8 Colocação em operaçãoEstabelecimento do estado de fornecimento
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)124
• Visão geral das somas de verificação• Dados de comunicação
8.9.4 Publicar aceitaçãoApós concluir a verificação técnica de segurança, a aceitação da placa de segurançapode ser publicada. Para publicar o conjunto de dados, inserir a soma de verificaçãodo relatório no Assist CS.. (linha 7 na figura a seguir).
21877787147
8.10 Estabelecimento do estado de fornecimento
AVISODepois que o estado de fornecimento da placa de segurança for restaurado, podeocorrer um movimento inesperado e acidental do acionamento.Morte ou ferimentos graves.• Certificar-se de que medidas organizacionais sejam tomadas para proteger pes-
soas e máquinas.
8.10.1 Pré-requisitosAntes de estabelecer o estado de fornecimento, é necessário assegurar que o siste-ma esteja parado e que nenhum movimento perigoso possa ser realizado.A senha para fazer login na ferramenta de parametrização "Assist CS.." está disponí-vel. A senha não é redefinida ao definir o estado de fornecimento. 26
6313
26/P
T-BR
– 1
2/20
20
8Colocação em operaçãoRedefinir senha
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 125
No estado de fornecimento da placa de segurança, nenhuma função do componentede segurança está ativada. A placa de segurança desliga o STO permanentemente.A parametrização da comunicação segura não é redefinida automaticamente. Paratal, definir o protocolo para "sem protocolo" na ferramenta de parametrização "AssistCS..".
8.10.2 Procedimento
1. No MOVISUITE® no menu "Diagnóstico", selecione o item do menu "DiagnósticoMOVISAFE® CS..". Em seguida, selecionar o item do menu "Geral". Clicar na tecla[Restaurar estado de fornecimento].
2. Abrir a ferramenta de parametrização "Assist CS.." e fazer login.3. Transferir os dados para a unidade. Para atualizar os dados no MOVISUITE®,
acessar o item do menu "Unidade → PC" no menu de contexto do eixo. Em segui-da, o conjunto de dados é válido e se comporta como após o fornecimento. Oidentificador "Aceito" não está definido.
8.11 Redefinir senha8.11.1 Procedimento
NOTAAo instalar e remover a placa de segurança, observar as informações no capítulo"Instalação mecânica".
Proceder da seguinte maneira:1. Desligar a unidade.2. Remover a placa de segurança. Para redefinir a senha, é necessária a senha
mestra da placa de segurança.3. A senha mestra específica da placa pode ser encontrada na etiqueta da placa de
segurança (consultar capítulo "Plaqueta de identificação").4. Reinstalar a placa de segurança.5. Religar o sistema.6. Abrir a ferramenta de parametrização "Assist CS..". Para abrir o menu principal,
clicar na área vermelha "Assist CS.." no canto superior esquerdo.7. Selecionar o item do menu "Alterar senha". Inserir a senha mestra no campo de
edição "Senha antiga".8. Digitar sua nova senha nos campos de edição "Nova senha" e "Repetir nova se-
nha". Confirmar suas entradas.Agora é possível parametrizar a placa de segurança na ferramenta de parametri-zação "Assist CS..".
2663
1326
/PT-
BR –
12/
2020

9 OperaçãoPerigo da operação do acionamento por inércia
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)126
9 Operação
9.1 Perigo da operação do acionamento por inércia
AVISOPerigo devido ao funcionamento por inércia. Sem freio mecânico ou com freio defei-tuoso, há o perigo de funcionamento por inércia.Morte ou ferimentos graves.• Em caso de perigos causados pelo funcionamento por inércia do acionamento e
que são dependentes da aplicação, é necessário tomar medidas de proteçãoadicionais (por ex, dispositivo de proteção separado com trava). As medidas deproteção adicionais devem isolar o ponto perigoso até não haver mais perigo pa-ra as pessoas. Alternativamente, deve-se equipar o acionamento com um freiode segurança.
• É necessário dimensionar as tampas de proteção adicionais de acordo com aavaliação de risco dos requisitos identificados da máquina e montá-las.
• Após a ativação de um comando de parada, dependendo do perigo do acesso,este deve permanecer bloqueado até a total imobilização do acionamento. Alter-nativamente, é necessário determinar o acesso ou o momento do acesso e en-tão calcular o período de segurança a cumprir.
2663
1326
/PT-
BR –
12/
2020
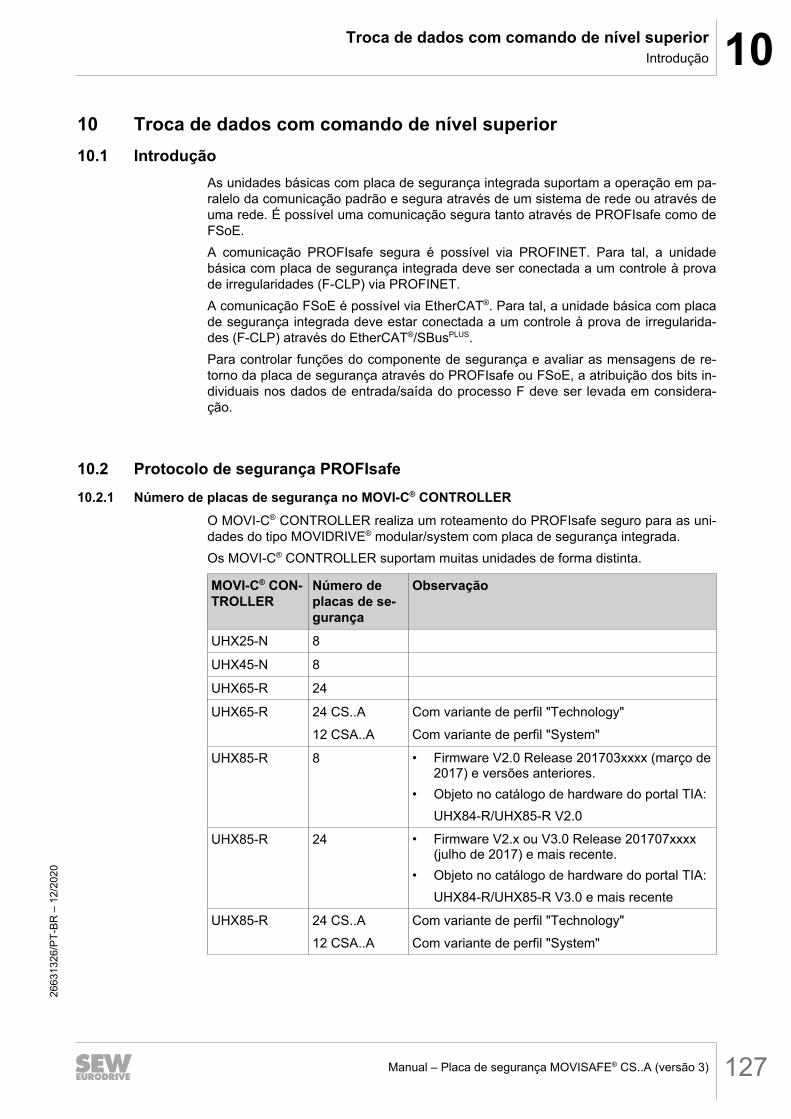
10Troca de dados com comando de nível superiorIntrodução
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 127
10 Troca de dados com comando de nível superior10.1 Introdução
As unidades básicas com placa de segurança integrada suportam a operação em pa-ralelo da comunicação padrão e segura através de um sistema de rede ou através deuma rede. É possível uma comunicação segura tanto através de PROFIsafe como deFSoE.A comunicação PROFIsafe segura é possível via PROFINET. Para tal, a unidadebásica com placa de segurança integrada deve ser conectada a um controle à provade irregularidades (F-CLP) via PROFINET.A comunicação FSoE é possível via EtherCAT®. Para tal, a unidade básica com placade segurança integrada deve estar conectada a um controle à prova de irregularida-des (F-CLP) através do EtherCAT®/SBusPLUS.Para controlar funções do componente de segurança e avaliar as mensagens de re-torno da placa de segurança através do PROFIsafe ou FSoE, a atribuição dos bits in-dividuais nos dados de entrada/saída do processo F deve ser levada em considera-ção.
10.2 Protocolo de segurança PROFIsafe10.2.1 Número de placas de segurança no MOVI-C® CONTROLLER
O MOVI‑C® CONTROLLER realiza um roteamento do PROFIsafe seguro para as uni-dades do tipo MOVIDRIVE® modular/system com placa de segurança integrada.Os MOVI-C® CONTROLLER suportam muitas unidades de forma distinta.
MOVI-C® CON-TROLLER
Número deplacas de se-gurança
Observação
UHX25-N 8
UHX45-N 8
UHX65-R 24
UHX65-R 24 CS..A12 CSA..A
Com variante de perfil "Technology"Com variante de perfil "System"
UHX85-R 8 • Firmware V2.0 Release 201703xxxx (março de2017) e versões anteriores.
• Objeto no catálogo de hardware do portal TIA:UHX84-R/UHX85-R V2.0
UHX85-R 24 • Firmware V2.x ou V3.0 Release 201707xxxx(julho de 2017) e mais recente.
• Objeto no catálogo de hardware do portal TIA:UHX84-R/UHX85-R V3.0 e mais recente
UHX85-R 24 CS..A12 CSA..A
Com variante de perfil "Technology"Com variante de perfil "System"
2663
1326
/PT-
BR –
12/
2020

10 Troca de dados com comando de nível superiorProtocolo de segurança PROFIsafe
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)128
10.2.2 Acesso da periferia F da placa de segurança no TIA-Portal
Versão PROFIsafe 2.4As placas de segurança CSB..A necessitam para uma comunicação segura um totalde 8 bytes de dados de entrada e 7 bytes de dados de saída para a seção do telegra-ma PROFIsafe e os ocupam na representação do processo. Dos bytes citados acima,4 bytes de dados de entrada e 3 bytes de dados de saída são dados I/O reais segu-ros (dados do usuário F).As placas de segurança CSS..A e CSA31A requerem para uma comunicação seguracom a variante de perfil "Technology" um total de 10 bytes de dados de entrada e 9bytes de dados de saída para a seção do telegrama PROFIsafe e os ocupam na re-presentação do processo. Dos bytes citados acima, 6 bytes de dados de entrada e 5bytes de dados de saída são dados I/O reais seguros (dados do usuário F).As placas de segurança CSA31A requerem para uma comunicação segura com a va-riante de perfil "Technology" um total de 16 bytes de dados de entrada e 10 bytes dedados de saída para a seção do telegrama PROFIsafe e os ocupam na representa-ção do processo. Dos bytes citados acima, 12 bytes de dados de entrada e 5 bytes dedados de saída são dados I/O reais seguros (dados do usuário F).Os 4 bytes restantes são necessários para armazenagem dos telegramas de acordocom a especificação PROFIsafe.
Versão PROFIsafe 2.6As placas de segurança CSB..A necessitam para uma comunicação segura um totalde 9 bytes de dados de entrada e 8 bytes de dados de saída para a seção do telegra-ma PROFIsafe e os ocupam na representação do processo. Dos bytes citados acima,4 bytes de dados de entrada e 3 bytes de dados de saída são dados I/O reais segu-ros (dados do usuário F).As placas de segurança CSS..A e CSA31A requerem para uma comunicação seguracom a variante de perfil "Technology" um total de 11 bytes de dados de entrada e 10bytes de dados de saída para a seção do telegrama PROFIsafe e os ocupam na re-presentação do processo. Dos bytes citados acima, 6 bytes de dados de entrada e 5bytes de dados de saída são dados I/O reais seguros (dados do usuário F).As placas de segurança CSA31A requerem para uma comunicação segura com a va-riante de perfil "Technology" um total de 17 bytes de dados de entrada e 10 bytes dedados de saída para a seção do telegrama PROFIsafe e os ocupam na representa-ção do processo. Dos bytes citados acima, 12 bytes de dados de entrada e 5 bytes dedados de saída são dados I/O reais seguros (dados do usuário F).Os 5 bytes restantes são necessários para armazenagem dos telegramas de acordocom a especificação PROFIsafe.
Tipo de endereço PROFIsafe 1A exclusividade do endereço PROFIsafe é garantida apenas pelo endereço de desti-no.• O endereço de destino deve ser exclusivo no fieldbus e na rede de controle. Isso
significa que as áreas de endereço de destino de todos os F-CLP não devem sesobrepor.
• Os endereços de destino e de origem estão incluídos no valor de verificação deredundância cíclica do programa de segurança do F-CLP.
2663
1326
/PT-
BR –
12/
2020
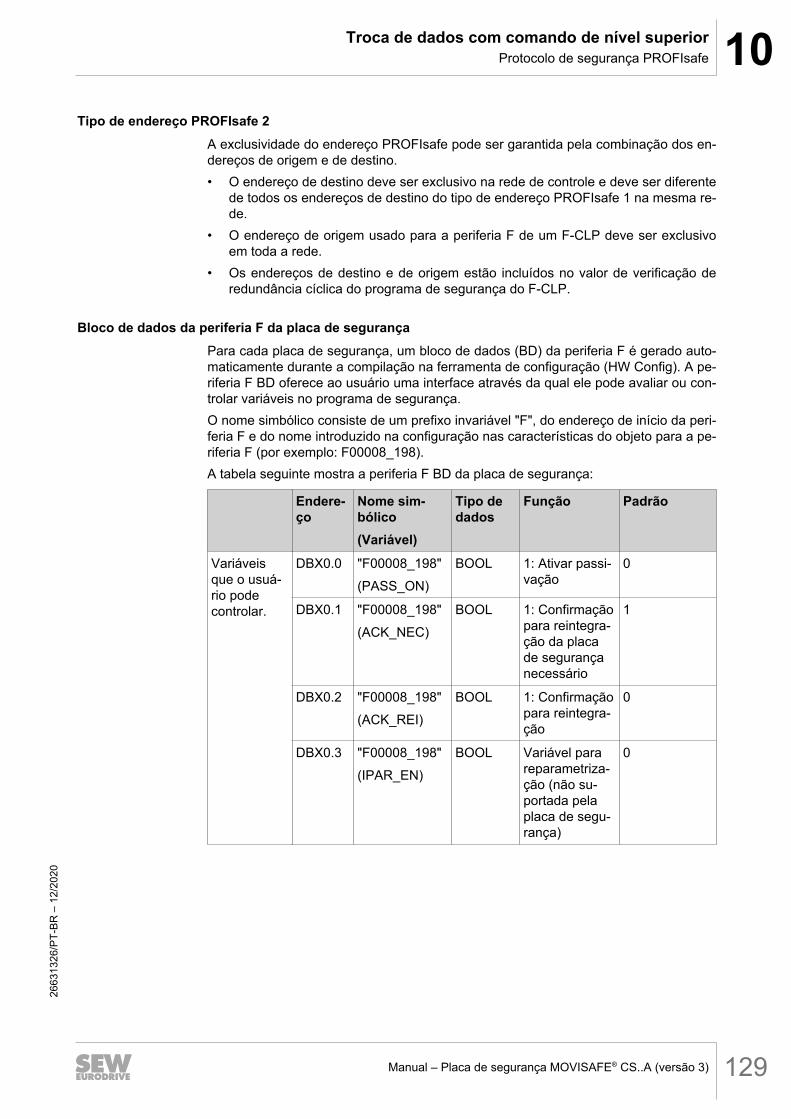
10Troca de dados com comando de nível superiorProtocolo de segurança PROFIsafe
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 129
Tipo de endereço PROFIsafe 2A exclusividade do endereço PROFIsafe pode ser garantida pela combinação dos en-dereços de origem e de destino.• O endereço de destino deve ser exclusivo na rede de controle e deve ser diferente
de todos os endereços de destino do tipo de endereço PROFIsafe 1 na mesma re-de.
• O endereço de origem usado para a periferia F de um F-CLP deve ser exclusivoem toda a rede.
• Os endereços de destino e de origem estão incluídos no valor de verificação deredundância cíclica do programa de segurança do F-CLP.
Bloco de dados da periferia F da placa de segurançaPara cada placa de segurança, um bloco de dados (BD) da periferia F é gerado auto-maticamente durante a compilação na ferramenta de configuração (HW Config). A pe-riferia F BD oferece ao usuário uma interface através da qual ele pode avaliar ou con-trolar variáveis no programa de segurança.O nome simbólico consiste de um prefixo invariável "F", do endereço de início da peri-feria F e do nome introduzido na configuração nas características do objeto para a pe-riferia F (por exemplo: F00008_198).A tabela seguinte mostra a periferia F BD da placa de segurança:
Endere-ço
Nome sim-bólico(Variável)
Tipo dedados
Função Padrão
Variáveisque o usuá-rio podecontrolar.
DBX0.0 "F00008_198"(PASS_ON)
BOOL 1: Ativar passi-vação
0
DBX0.1 "F00008_198"(ACK_NEC)
BOOL 1: Confirmaçãopara reintegra-ção da placade segurançanecessário
1
DBX0.2 "F00008_198"(ACK_REI)
BOOL 1: Confirmaçãopara reintegra-ção
0
DBX0.3 "F00008_198"(IPAR_EN)
BOOL Variável parareparametriza-ção (não su-portada pelaplaca de segu-rança)
0
2663
1326
/PT-
BR –
12/
2020
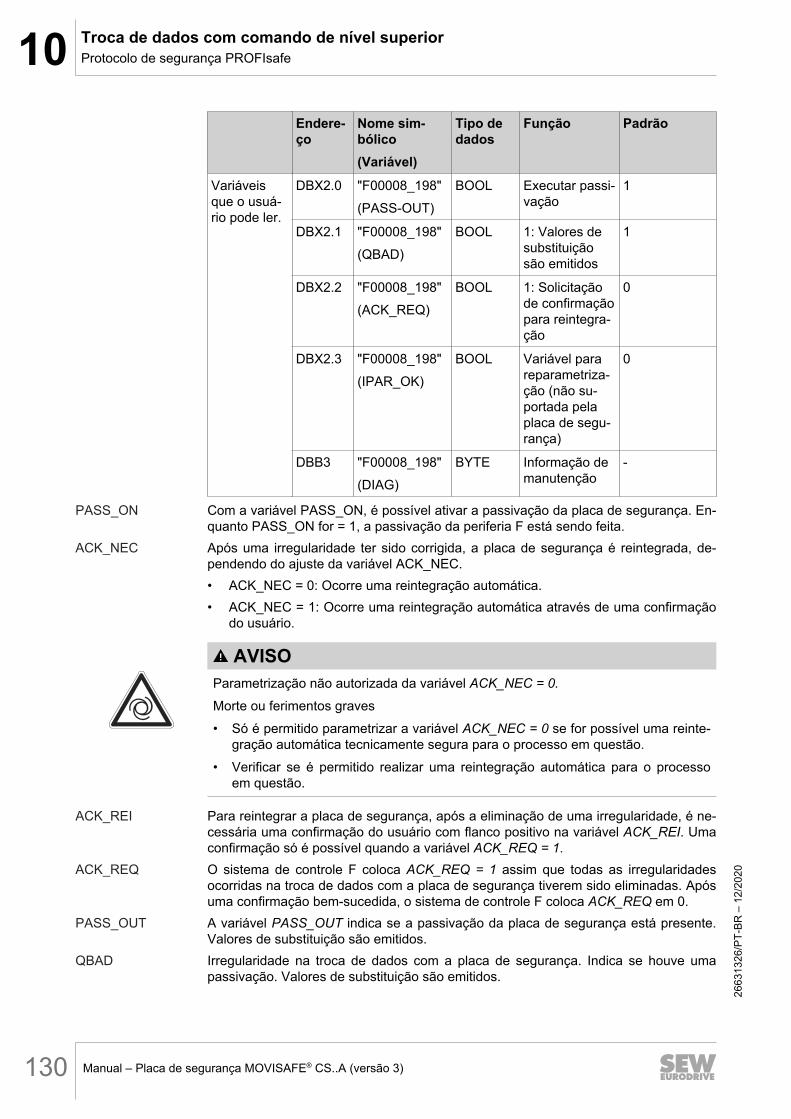
10 Troca de dados com comando de nível superiorProtocolo de segurança PROFIsafe
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)130
Endere-ço
Nome sim-bólico(Variável)
Tipo dedados
Função Padrão
Variáveisque o usuá-rio pode ler.
DBX2.0 "F00008_198"(PASS-OUT)
BOOL Executar passi-vação
1
DBX2.1 "F00008_198"(QBAD)
BOOL 1: Valores desubstituiçãosão emitidos
1
DBX2.2 "F00008_198"(ACK_REQ)
BOOL 1: Solicitaçãode confirmaçãopara reintegra-ção
0
DBX2.3 "F00008_198"(IPAR_OK)
BOOL Variável parareparametriza-ção (não su-portada pelaplaca de segu-rança)
0
DBB3 "F00008_198"(DIAG)
BYTE Informação demanutenção
-
PASS_ON Com a variável PASS_ON, é possível ativar a passivação da placa de segurança. En-quanto PASS_ON for = 1, a passivação da periferia F está sendo feita.
ACK_NEC Após uma irregularidade ter sido corrigida, a placa de segurança é reintegrada, de-pendendo do ajuste da variável ACK_NEC.• ACK_NEC = 0: Ocorre uma reintegração automática.• ACK_NEC = 1: Ocorre uma reintegração automática através de uma confirmação
do usuário.
AVISOParametrização não autorizada da variável ACK_NEC = 0.
Morte ou ferimentos graves• Só é permitido parametrizar a variável ACK_NEC = 0 se for possível uma reinte-
gração automática tecnicamente segura para o processo em questão.• Verificar se é permitido realizar uma reintegração automática para o processo
em questão.
ACK_REI Para reintegrar a placa de segurança, após a eliminação de uma irregularidade, é ne-cessária uma confirmação do usuário com flanco positivo na variável ACK_REI. Umaconfirmação só é possível quando a variável ACK_REQ = 1.
ACK_REQ O sistema de controle F coloca ACK_REQ = 1 assim que todas as irregularidadesocorridas na troca de dados com a placa de segurança tiverem sido eliminadas. Apósuma confirmação bem-sucedida, o sistema de controle F coloca ACK_REQ em 0.
PASS_OUT A variável PASS_OUT indica se a passivação da placa de segurança está presente.Valores de substituição são emitidos.
QBAD Irregularidade na troca de dados com a placa de segurança. Indica se houve umapassivação. Valores de substituição são emitidos.
2663
1326
/PT-
BR –
12/
2020
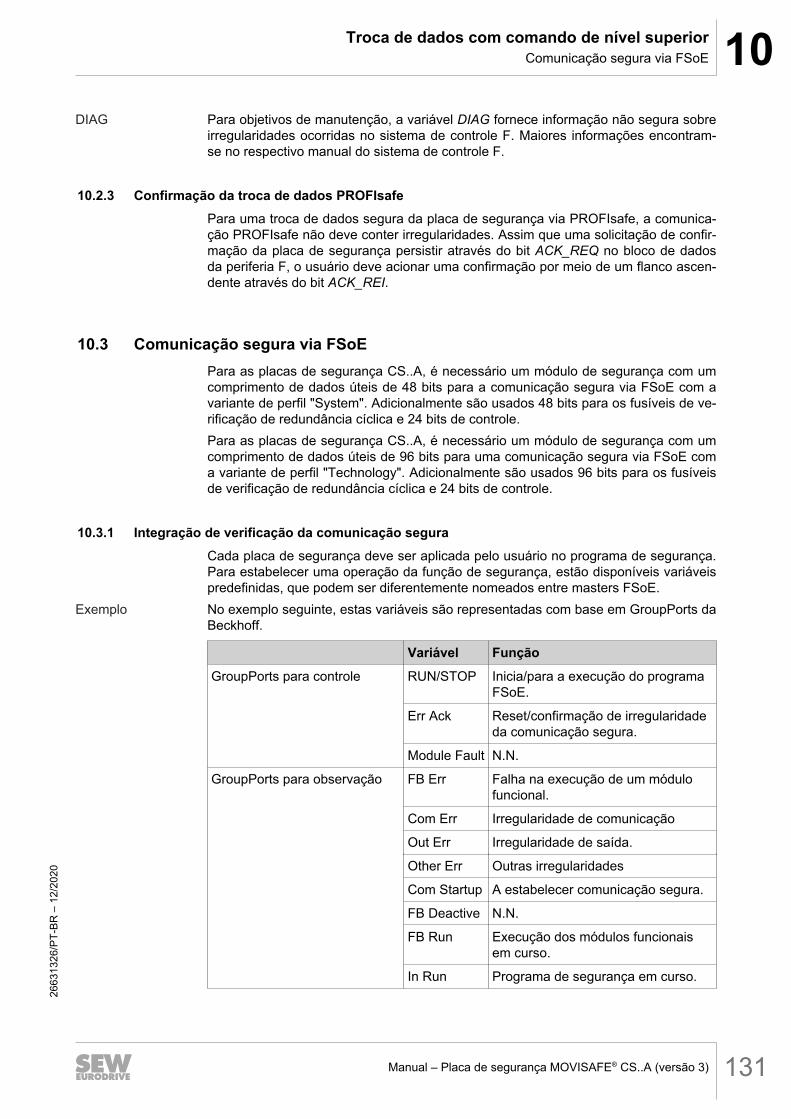
10Troca de dados com comando de nível superiorComunicação segura via FSoE
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 131
DIAG Para objetivos de manutenção, a variável DIAG fornece informação não segura sobreirregularidades ocorridas no sistema de controle F. Maiores informações encontram-se no respectivo manual do sistema de controle F.
10.2.3 Confirmação da troca de dados PROFIsafePara uma troca de dados segura da placa de segurança via PROFIsafe, a comunica-ção PROFIsafe não deve conter irregularidades. Assim que uma solicitação de confir-mação da placa de segurança persistir através do bit ACK_REQ no bloco de dadosda periferia F, o usuário deve acionar uma confirmação por meio de um flanco ascen-dente através do bit ACK_REI.
10.3 Comunicação segura via FSoEPara as placas de segurança CS..A, é necessário um módulo de segurança com umcomprimento de dados úteis de 48 bits para a comunicação segura via FSoE com avariante de perfil "System". Adicionalmente são usados 48 bits para os fusíveis de ve-rificação de redundância cíclica e 24 bits de controle.Para as placas de segurança CS..A, é necessário um módulo de segurança com umcomprimento de dados úteis de 96 bits para uma comunicação segura via FSoE coma variante de perfil "Technology". Adicionalmente são usados 96 bits para os fusíveisde verificação de redundância cíclica e 24 bits de controle.
10.3.1 Integração de verificação da comunicação seguraCada placa de segurança deve ser aplicada pelo usuário no programa de segurança.Para estabelecer uma operação da função de segurança, estão disponíveis variáveispredefinidas, que podem ser diferentemente nomeados entre masters FSoE.
Exemplo No exemplo seguinte, estas variáveis são representadas com base em GroupPorts daBeckhoff.
Variável FunçãoGroupPorts para controle RUN/STOP Inicia/para a execução do programa
FSoE.
Err Ack Reset/confirmação de irregularidadeda comunicação segura.
Module Fault N.N.
GroupPorts para observação FB Err Falha na execução de um módulofuncional.
Com Err Irregularidade de comunicação
Out Err Irregularidade de saída.
Other Err Outras irregularidades
Com Startup A estabelecer comunicação segura.
FB Deactive N.N.
FB Run Execução dos módulos funcionaisem curso.
In Run Programa de segurança em curso.
2663
1326
/PT-
BR –
12/
2020
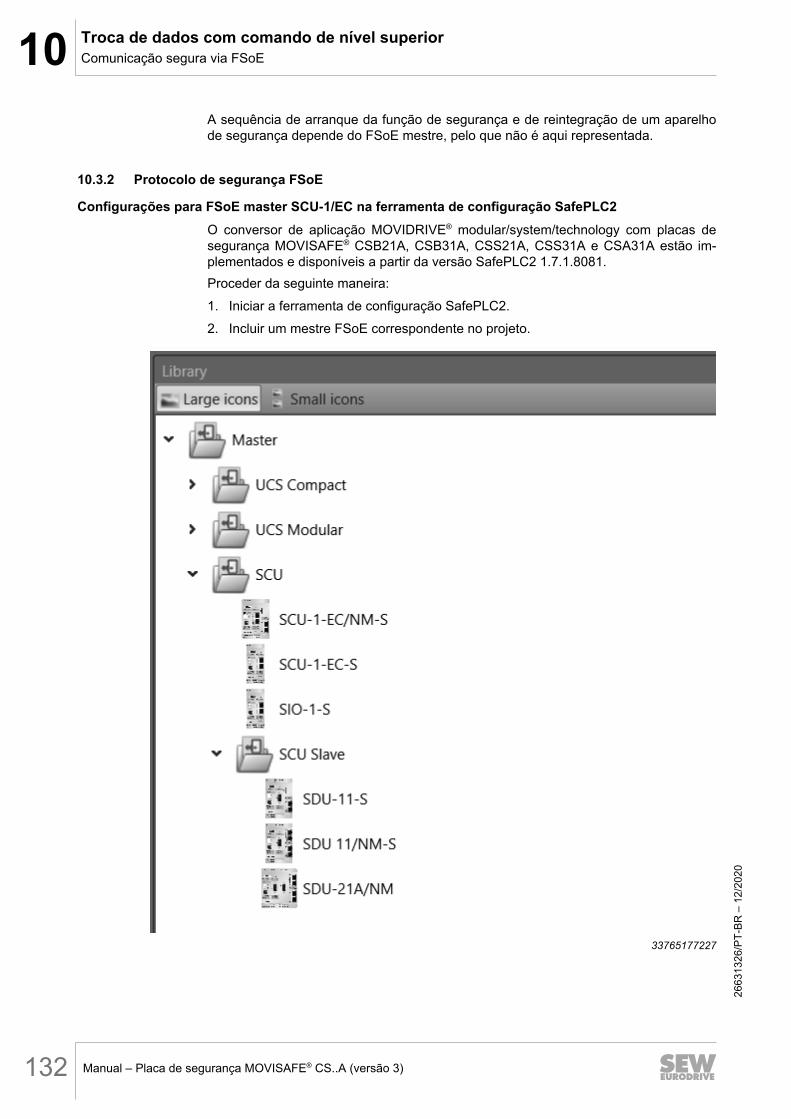
10 Troca de dados com comando de nível superiorComunicação segura via FSoE
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)132
A sequência de arranque da função de segurança e de reintegração de um aparelhode segurança depende do FSoE mestre, pelo que não é aqui representada.
10.3.2 Protocolo de segurança FSoE
Configurações para FSoE master SCU-1/EC na ferramenta de configuração SafePLC2O conversor de aplicação MOVIDRIVE® modular/system/technology com placas desegurança MOVISAFE® CSB21A, CSB31A, CSS21A, CSS31A e CSA31A estão im-plementados e disponíveis a partir da versão SafePLC2 1.7.1.8081.Proceder da seguinte maneira:1. Iniciar a ferramenta de configuração SafePLC2.2. Incluir um mestre FSoE correspondente no projeto.
33765177227
2663
1326
/PT-
BR –
12/
2020
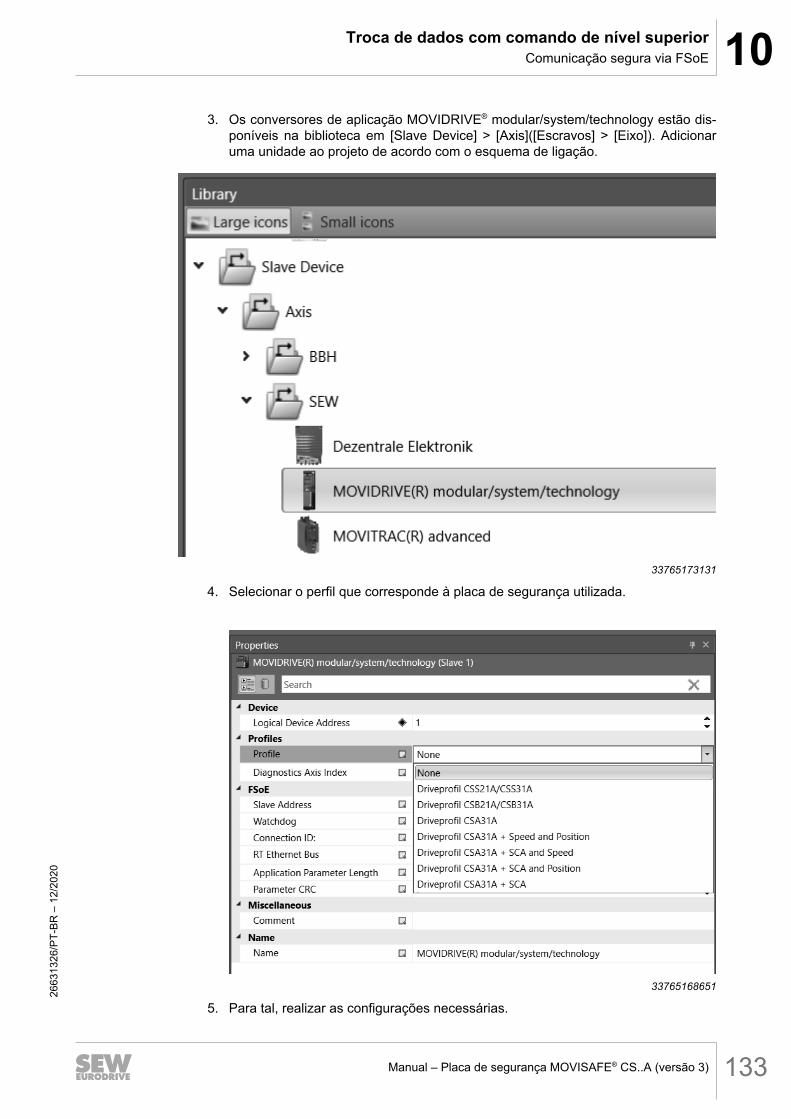
10Troca de dados com comando de nível superiorComunicação segura via FSoE
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 133
3. Os conversores de aplicação MOVIDRIVE® modular/system/technology estão dis-poníveis na biblioteca em [Slave Device] > [Axis]([Escravos] > [Eixo]). Adicionaruma unidade ao projeto de acordo com o esquema de ligação.
33765173131
4. Selecionar o perfil que corresponde à placa de segurança utilizada.
33765168651
5. Para tal, realizar as configurações necessárias.
2663
1326
/PT-
BR –
12/
2020
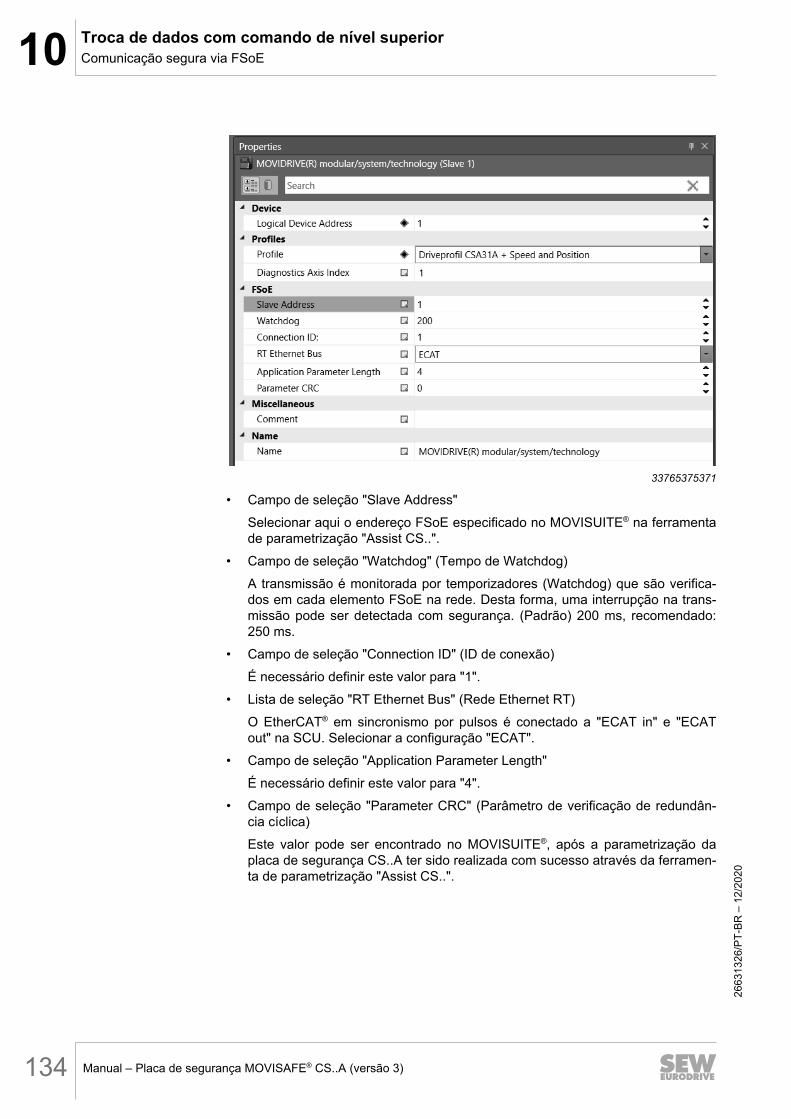
10 Troca de dados com comando de nível superiorComunicação segura via FSoE
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)134
33765375371
• Campo de seleção "Slave Address"Selecionar aqui o endereço FSoE especificado no MOVISUITE® na ferramentade parametrização "Assist CS..".
• Campo de seleção "Watchdog" (Tempo de Watchdog)A transmissão é monitorada por temporizadores (Watchdog) que são verifica-dos em cada elemento FSoE na rede. Desta forma, uma interrupção na trans-missão pode ser detectada com segurança. (Padrão) 200 ms, recomendado:250 ms.
• Campo de seleção "Connection ID" (ID de conexão)É necessário definir este valor para "1".
• Lista de seleção "RT Ethernet Bus" (Rede Ethernet RT)O EtherCAT® em sincronismo por pulsos é conectado a "ECAT in" e "ECATout" na SCU. Selecionar a configuração "ECAT".
• Campo de seleção "Application Parameter Length"É necessário definir este valor para "4".
• Campo de seleção "Parameter CRC" (Parâmetro de verificação de redundân-cia cíclica)Este valor pode ser encontrado no MOVISUITE®, após a parametrização daplaca de segurança CS..A ter sido realizada com sucesso através da ferramen-ta de parametrização "Assist CS..".
2663
1326
/PT-
BR –
12/
2020
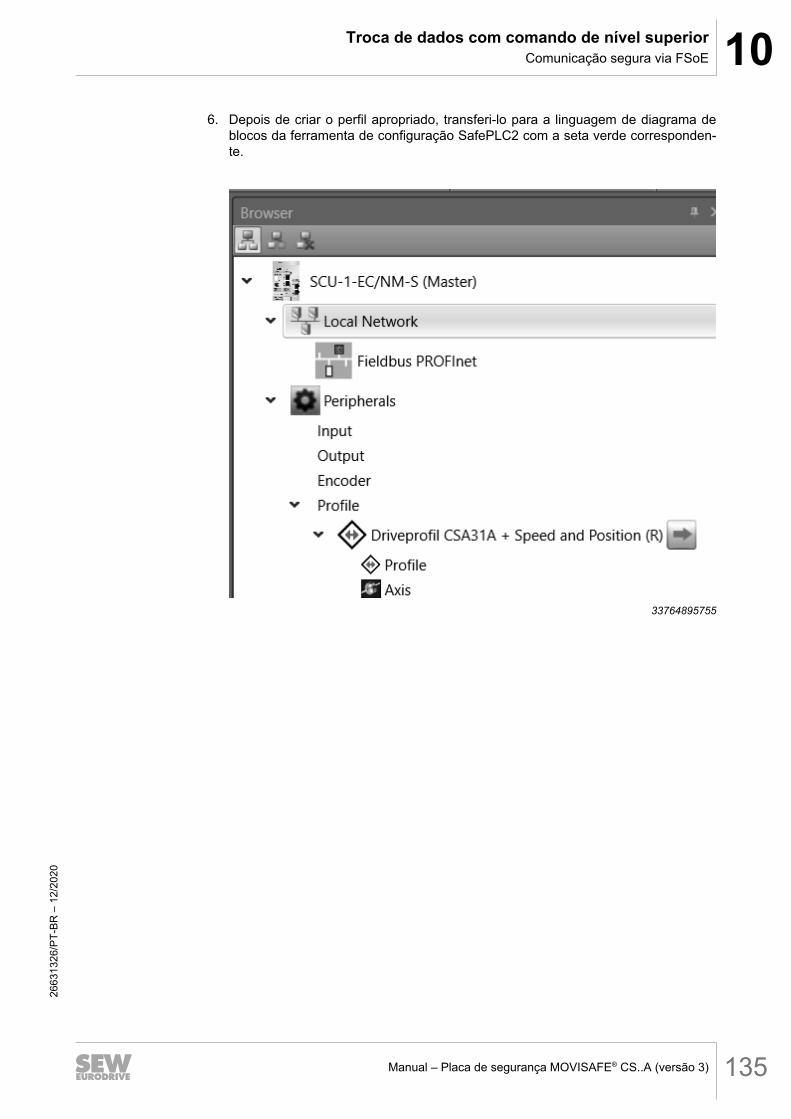
10Troca de dados com comando de nível superiorComunicação segura via FSoE
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 135
6. Depois de criar o perfil apropriado, transferi-lo para a linguagem de diagrama deblocos da ferramenta de configuração SafePLC2 com a seta verde corresponden-te.
33764895755
2663
1326
/PT-
BR –
12/
2020
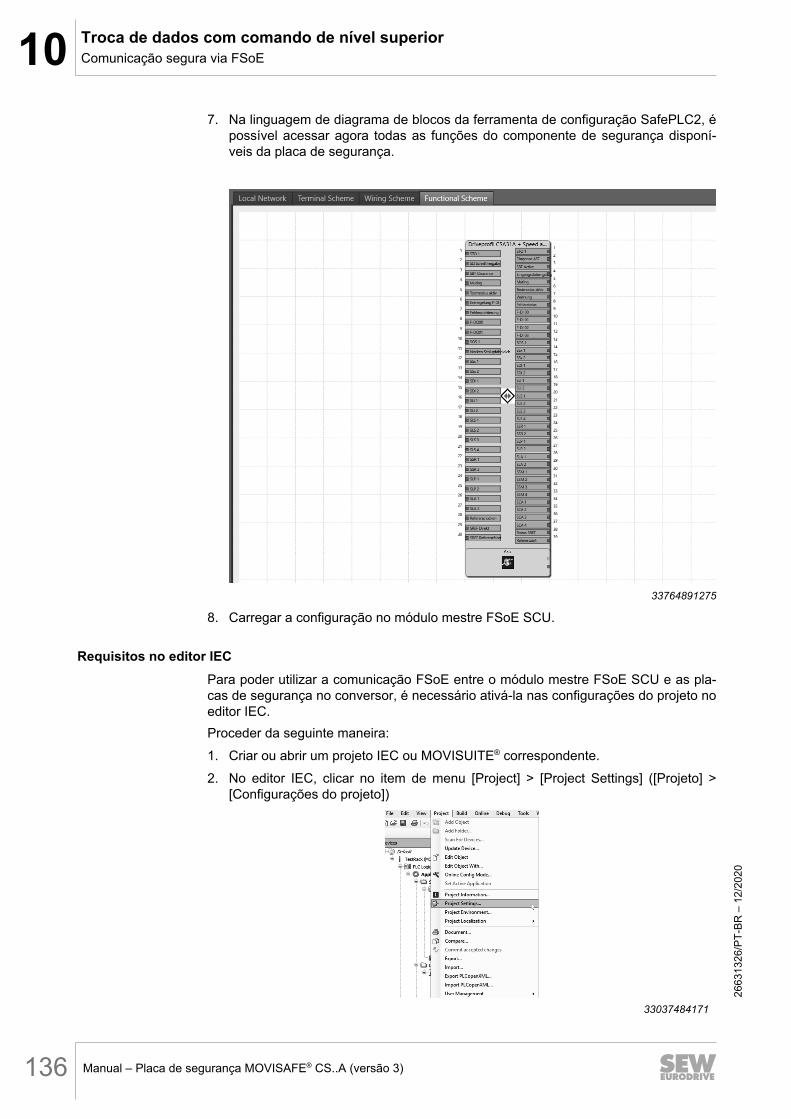
10 Troca de dados com comando de nível superiorComunicação segura via FSoE
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)136
7. Na linguagem de diagrama de blocos da ferramenta de configuração SafePLC2, épossível acessar agora todas as funções do componente de segurança disponí-veis da placa de segurança.
33764891275
8. Carregar a configuração no módulo mestre FSoE SCU.
Requisitos no editor IECPara poder utilizar a comunicação FSoE entre o módulo mestre FSoE SCU e as pla-cas de segurança no conversor, é necessário ativá-la nas configurações do projeto noeditor IEC.Proceder da seguinte maneira:1. Criar ou abrir um projeto IEC ou MOVISUITE® correspondente.2. No editor IEC, clicar no item de menu [Project] > [Project Settings] ([Projeto] >
[Configurações do projeto])
33037484171
2663
1326
/PT-
BR –
12/
2020
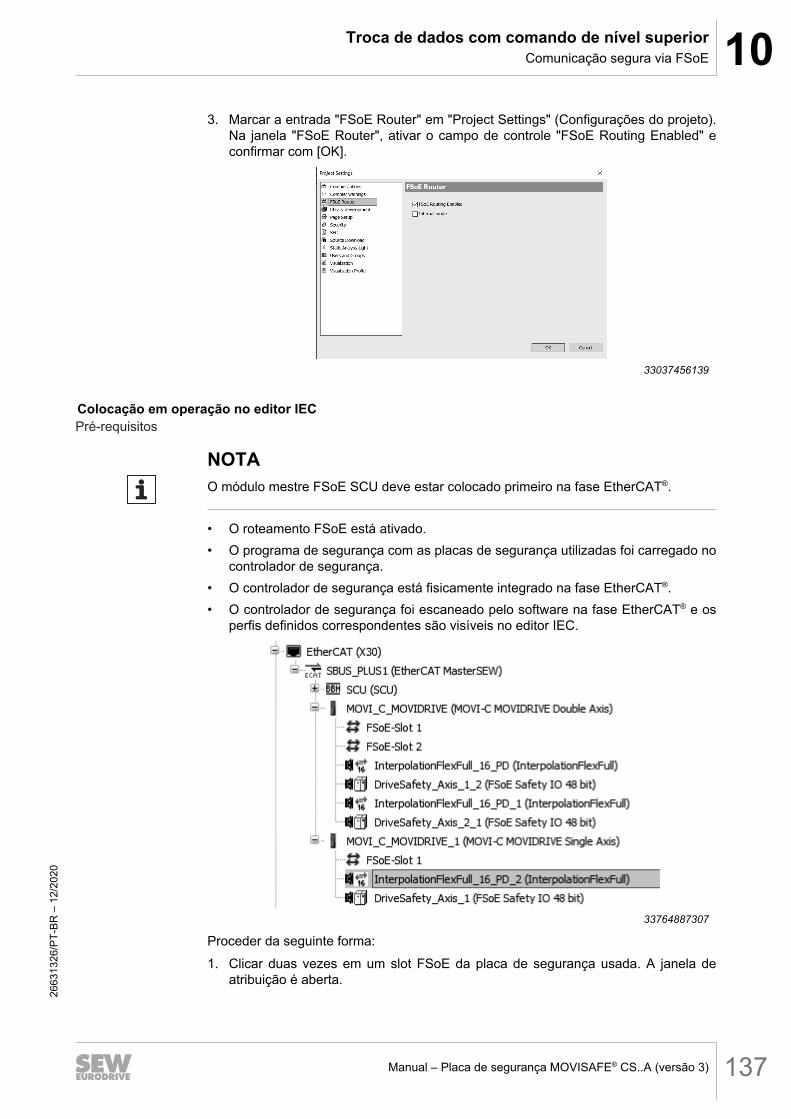
10Troca de dados com comando de nível superiorComunicação segura via FSoE
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 137
3. Marcar a entrada "FSoE Router" em "Project Settings" (Configurações do projeto).Na janela "FSoE Router", ativar o campo de controle "FSoE Routing Enabled" econfirmar com [OK].
33037456139
Colocação em operação no editor IECPré-requisitos
NOTAO módulo mestre FSoE SCU deve estar colocado primeiro na fase EtherCAT®.
• O roteamento FSoE está ativado.• O programa de segurança com as placas de segurança utilizadas foi carregado no
controlador de segurança.• O controlador de segurança está fisicamente integrado na fase EtherCAT®.• O controlador de segurança foi escaneado pelo software na fase EtherCAT® e os
perfis definidos correspondentes são visíveis no editor IEC.
33764887307
Proceder da seguinte forma:1. Clicar duas vezes em um slot FSoE da placa de segurança usada. A janela de
atribuição é aberta.
2663
1326
/PT-
BR –
12/
2020
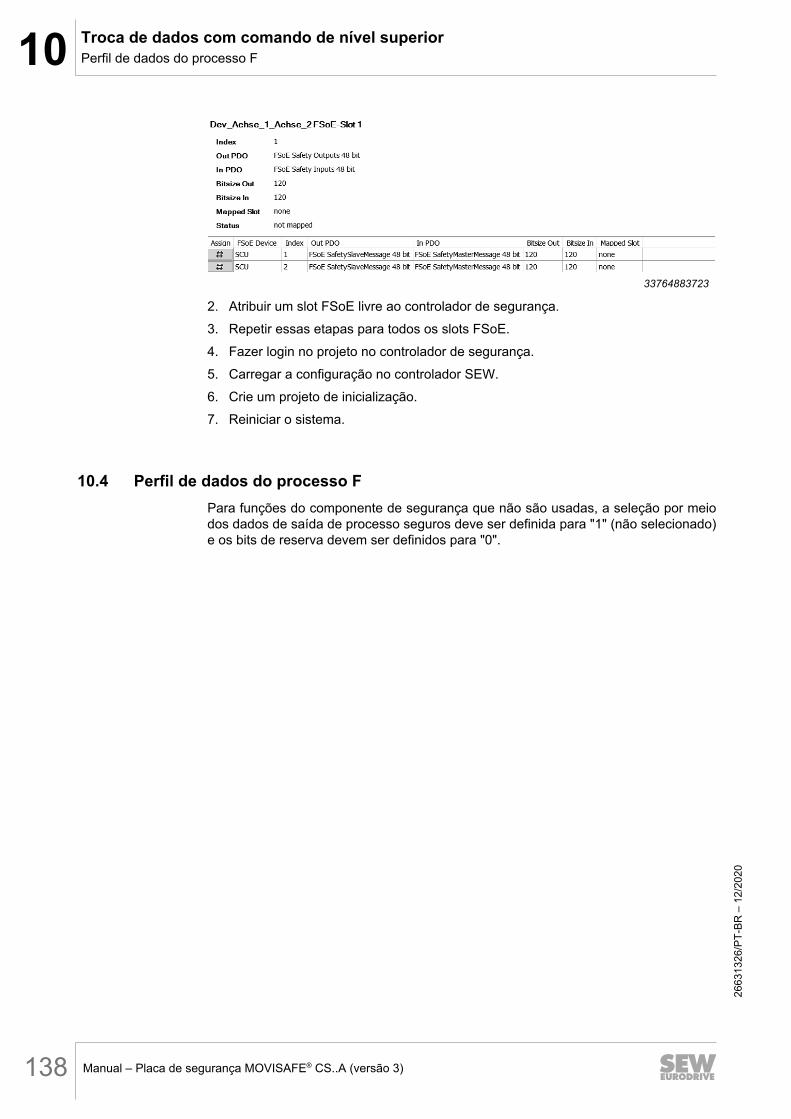
10 Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)138
33764883723
2. Atribuir um slot FSoE livre ao controlador de segurança.3. Repetir essas etapas para todos os slots FSoE.4. Fazer login no projeto no controlador de segurança.5. Carregar a configuração no controlador SEW.6. Crie um projeto de inicialização.7. Reiniciar o sistema.
10.4 Perfil de dados do processo FPara funções do componente de segurança que não são usadas, a seleção por meiodos dados de saída de processo seguros deve ser definida para "1" (não selecionado)e os bits de reserva devem ser definidos para "0".
2663
1326
/PT-
BR –
12/
2020
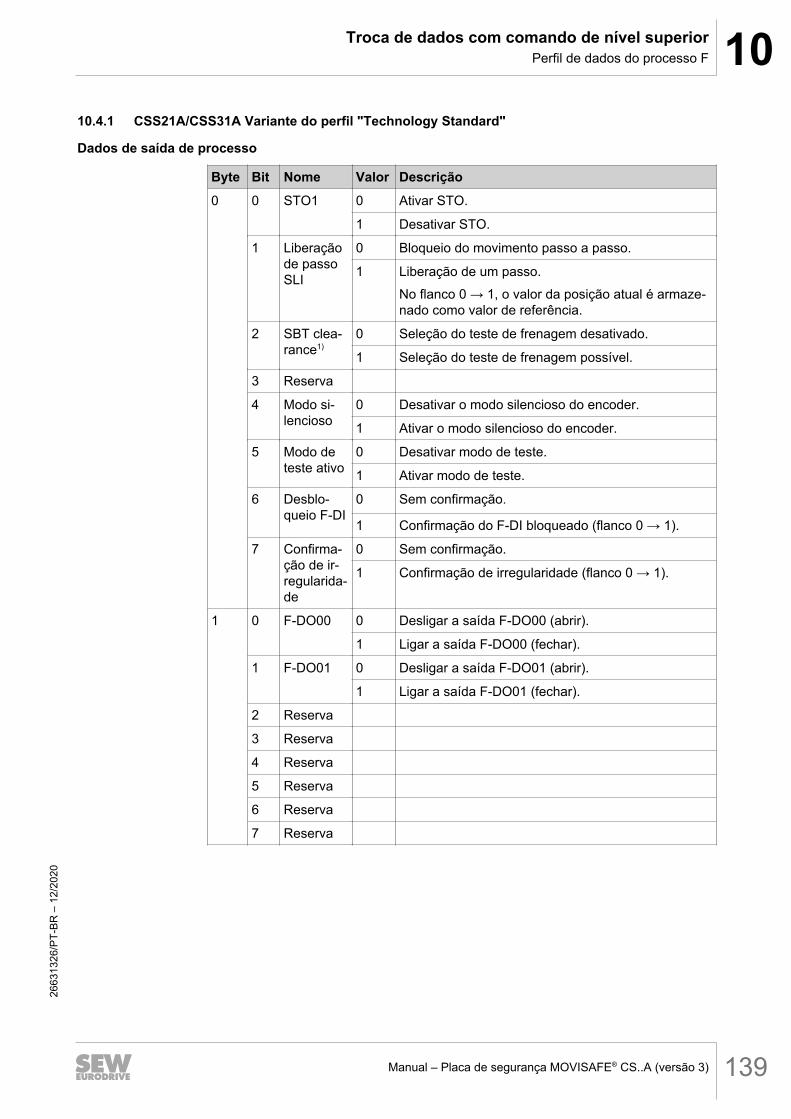
10Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 139
10.4.1 CSS21A/CSS31A Variante do perfil "Technology Standard"
Dados de saída de processo
Byte Bit Nome Valor Descrição0 0 STO1 0 Ativar STO.
1 Desativar STO.
1 Liberaçãode passoSLI
0 Bloqueio do movimento passo a passo.
1 Liberação de um passo.No flanco 0 → 1, o valor da posição atual é armaze-nado como valor de referência.
2 SBT clea-rance1)
0 Seleção do teste de frenagem desativado.
1 Seleção do teste de frenagem possível.
3 Reserva
4 Modo si-lencioso
0 Desativar o modo silencioso do encoder.
1 Ativar o modo silencioso do encoder.
5 Modo deteste ativo
0 Desativar modo de teste.
1 Ativar modo de teste.
6 Desblo-queio F-DI
0 Sem confirmação.
1 Confirmação do F-DI bloqueado (flanco 0 → 1).
7 Confirma-ção de ir-regularida-de
0 Sem confirmação.
1 Confirmação de irregularidade (flanco 0 → 1).
1 0 F-DO00 0 Desligar a saída F-DO00 (abrir).
1 Ligar a saída F-DO00 (fechar).
1 F-DO01 0 Desligar a saída F-DO01 (abrir).
1 Ligar a saída F-DO01 (fechar).
2 Reserva
3 Reserva
4 Reserva
5 Reserva
6 Reserva
7 Reserva
2663
1326
/PT-
BR –
12/
2020
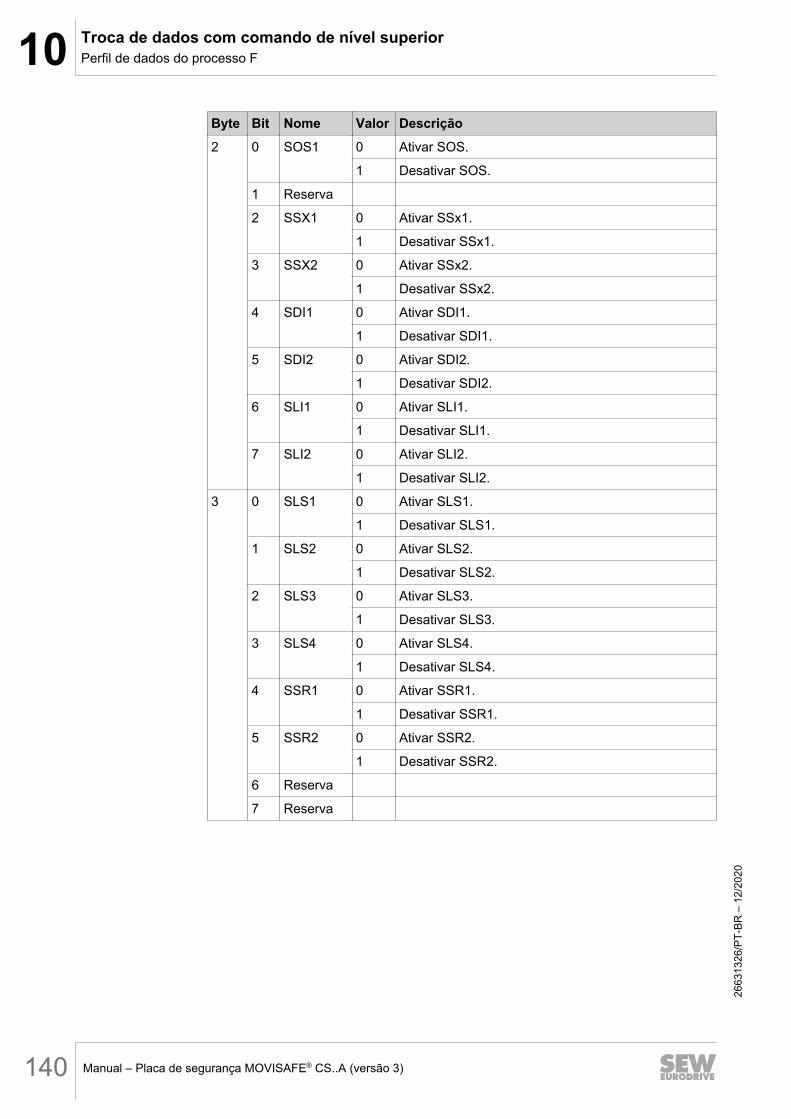
10 Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)140
Byte Bit Nome Valor Descrição2 0 SOS1 0 Ativar SOS.
1 Desativar SOS.
1 Reserva
2 SSX1 0 Ativar SSx1.
1 Desativar SSx1.
3 SSX2 0 Ativar SSx2.
1 Desativar SSx2.
4 SDI1 0 Ativar SDI1.
1 Desativar SDI1.
5 SDI2 0 Ativar SDI2.
1 Desativar SDI2.
6 SLI1 0 Ativar SLI1.
1 Desativar SLI1.
7 SLI2 0 Ativar SLI2.
1 Desativar SLI2.
3 0 SLS1 0 Ativar SLS1.
1 Desativar SLS1.
1 SLS2 0 Ativar SLS2.
1 Desativar SLS2.
2 SLS3 0 Ativar SLS3.
1 Desativar SLS3.
3 SLS4 0 Ativar SLS4.
1 Desativar SLS4.
4 SSR1 0 Ativar SSR1.
1 Desativar SSR1.
5 SSR2 0 Ativar SSR2.
1 Desativar SSR2.
6 Reserva
7 Reserva
2663
1326
/PT-
BR –
12/
2020
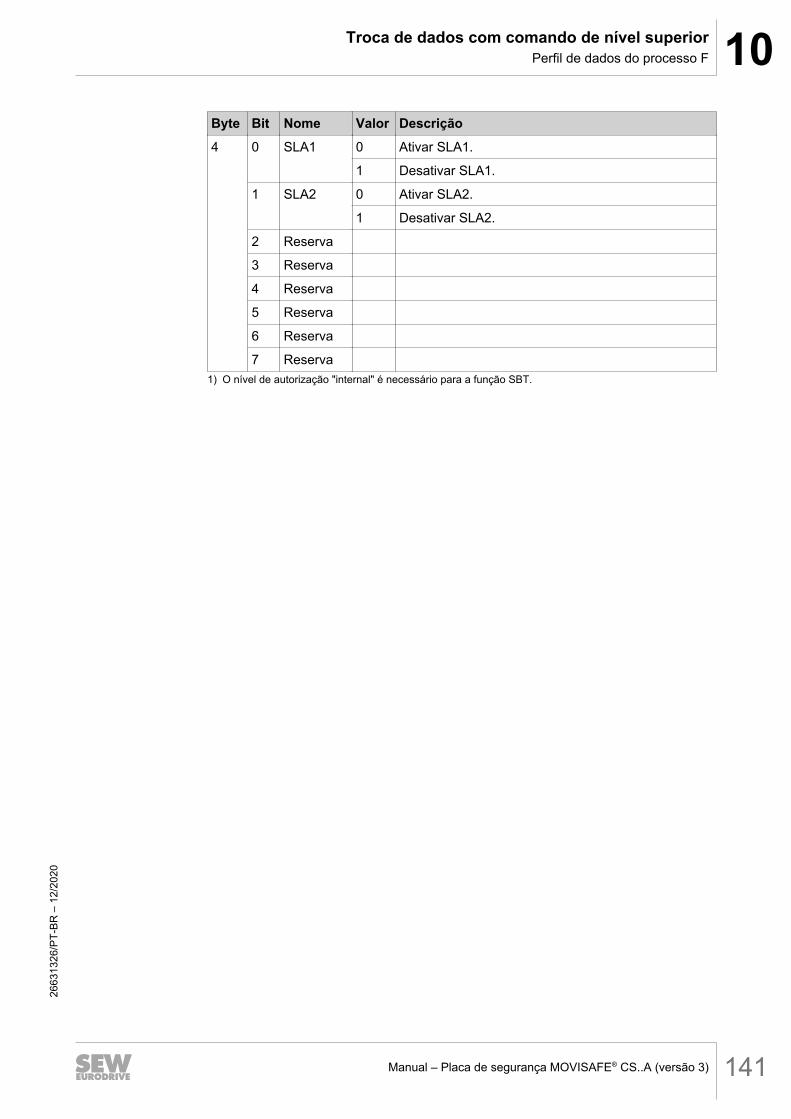
10Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 141
Byte Bit Nome Valor Descrição4 0 SLA1 0 Ativar SLA1.
1 Desativar SLA1.
1 SLA2 0 Ativar SLA2.
1 Desativar SLA2.
2 Reserva
3 Reserva
4 Reserva
5 Reserva
6 Reserva
7 Reserva1) O nível de autorização "internal" é necessário para a função SBT.
2663
1326
/PT-
BR –
12/
2020
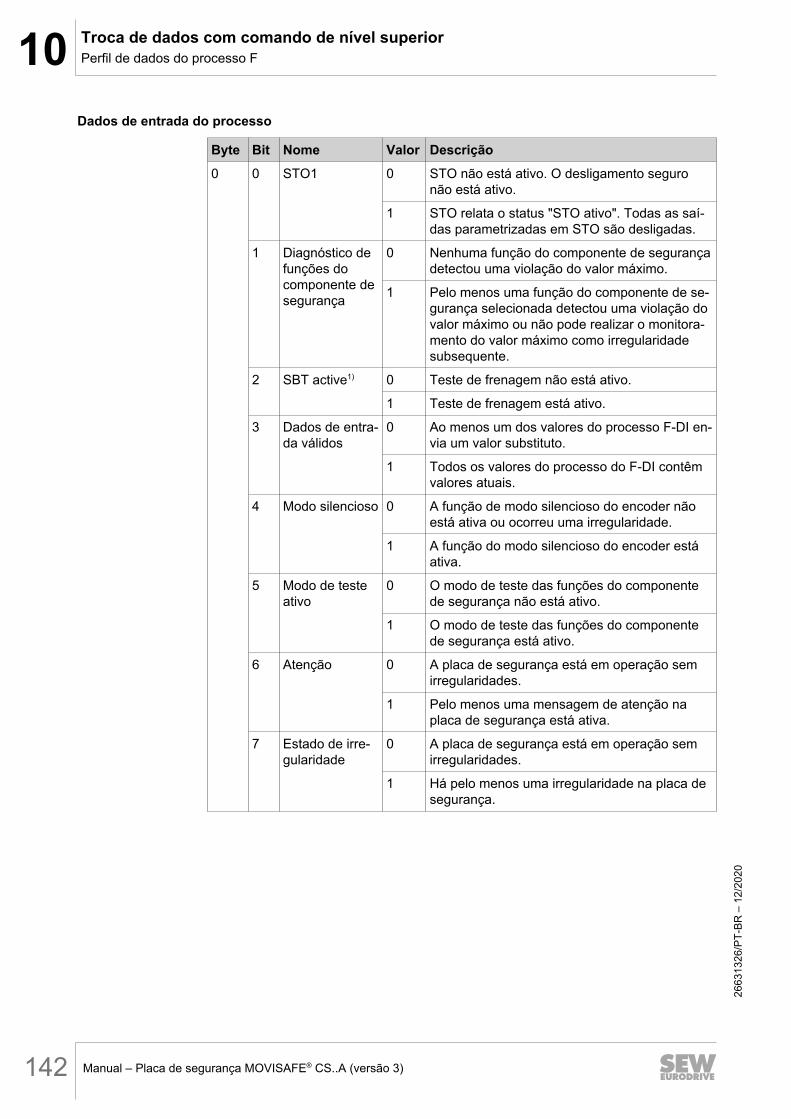
10 Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)142
Dados de entrada do processo
Byte Bit Nome Valor Descrição0 0 STO1 0 STO não está ativo. O desligamento seguro
não está ativo.
1 STO relata o status "STO ativo". Todas as saí-das parametrizadas em STO são desligadas.
1 Diagnóstico defunções docomponente desegurança
0 Nenhuma função do componente de segurançadetectou uma violação do valor máximo.
1 Pelo menos uma função do componente de se-gurança selecionada detectou uma violação dovalor máximo ou não pode realizar o monitora-mento do valor máximo como irregularidadesubsequente.
2 SBT active1) 0 Teste de frenagem não está ativo.
1 Teste de frenagem está ativo.
3 Dados de entra-da válidos
0 Ao menos um dos valores do processo F-DI en-via um valor substituto.
1 Todos os valores do processo do F-DI contêmvalores atuais.
4 Modo silencioso 0 A função de modo silencioso do encoder nãoestá ativa ou ocorreu uma irregularidade.
1 A função do modo silencioso do encoder estáativa.
5 Modo de testeativo
0 O modo de teste das funções do componentede segurança não está ativo.
1 O modo de teste das funções do componentede segurança está ativo.
6 Atenção 0 A placa de segurança está em operação semirregularidades.
1 Pelo menos uma mensagem de atenção naplaca de segurança está ativa.
7 Estado de irre-gularidade
0 A placa de segurança está em operação semirregularidades.
1 Há pelo menos uma irregularidade na placa desegurança.
2663
1326
/PT-
BR –
12/
2020

10Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 143
Byte Bit Nome Valor Descrição1 0 F-DI00 0 Valor de processo F‑DI00: "low" ou irregularida-
de.
1 Valor de processo F‑DI00: "high".
1 F-DI01 0 Valor de processo F‑DI01: "low" ou irregularida-de.
1 Valor de processo F‑DI01: "high".
2 F-DI02 0 Valor de processo F‑DI02: "low" ou irregularida-de.
1 Valor de processo F‑DI02: "high".
3 F-DI03 0 Valor de processo F‑DI03: "low" ou irregularida-de.
1 Valor de processo F‑DI03: "high".
4 Reserva
5 Reserva
6 Reserva
7 Reserva
2 0 SOS1 0 SOS1 não ativo ou violação do valor máximo/ir-regularidade.
1 SOS1 está ativo.
1 Reserva
2 SSx1 0 SSx1 não ativo ou violação do valor máximo/ir-regularidade.
1 SSx1 está ativo.
3 SSx2 0 SSx2 não ativo ou violação do valor máximo/ir-regularidade.
1 SSx2 está ativo.
4 SDI1 0 SDI1 não ativo ou violação do valor máximo/ir-regularidade.
1 SDI1 está ativo.
5 SDI2 0 SDI2 não ativo ou violação do valor máximo/ir-regularidade.
1 SDI2 está ativo.
6 SLI1 0 SLI1 não ativo ou violação do valor máximo/ir-regularidade.
1 SLI1 está ativo.
7 SLI2 0 SLI2 não ativo ou violação do valor máximo/ir-regularidade.
1 SLI2 está ativo.
2663
1326
/PT-
BR –
12/
2020
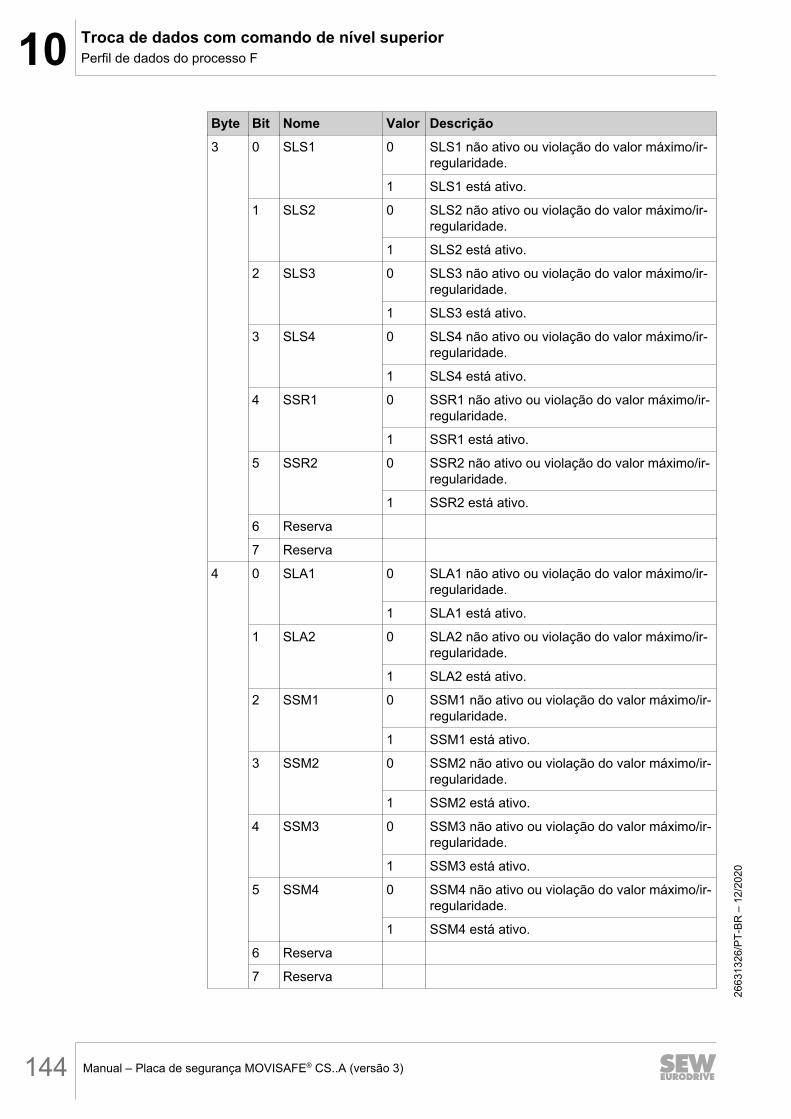
10 Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)144
Byte Bit Nome Valor Descrição3 0 SLS1 0 SLS1 não ativo ou violação do valor máximo/ir-
regularidade.
1 SLS1 está ativo.
1 SLS2 0 SLS2 não ativo ou violação do valor máximo/ir-regularidade.
1 SLS2 está ativo.
2 SLS3 0 SLS3 não ativo ou violação do valor máximo/ir-regularidade.
1 SLS3 está ativo.
3 SLS4 0 SLS4 não ativo ou violação do valor máximo/ir-regularidade.
1 SLS4 está ativo.
4 SSR1 0 SSR1 não ativo ou violação do valor máximo/ir-regularidade.
1 SSR1 está ativo.
5 SSR2 0 SSR2 não ativo ou violação do valor máximo/ir-regularidade.
1 SSR2 está ativo.
6 Reserva
7 Reserva
4 0 SLA1 0 SLA1 não ativo ou violação do valor máximo/ir-regularidade.
1 SLA1 está ativo.
1 SLA2 0 SLA2 não ativo ou violação do valor máximo/ir-regularidade.
1 SLA2 está ativo.
2 SSM1 0 SSM1 não ativo ou violação do valor máximo/ir-regularidade.
1 SSM1 está ativo.
3 SSM2 0 SSM2 não ativo ou violação do valor máximo/ir-regularidade.
1 SSM2 está ativo.
4 SSM3 0 SSM3 não ativo ou violação do valor máximo/ir-regularidade.
1 SSM3 está ativo.
5 SSM4 0 SSM4 não ativo ou violação do valor máximo/ir-regularidade.
1 SSM4 está ativo.
6 Reserva
7 Reserva
2663
1326
/PT-
BR –
12/
2020
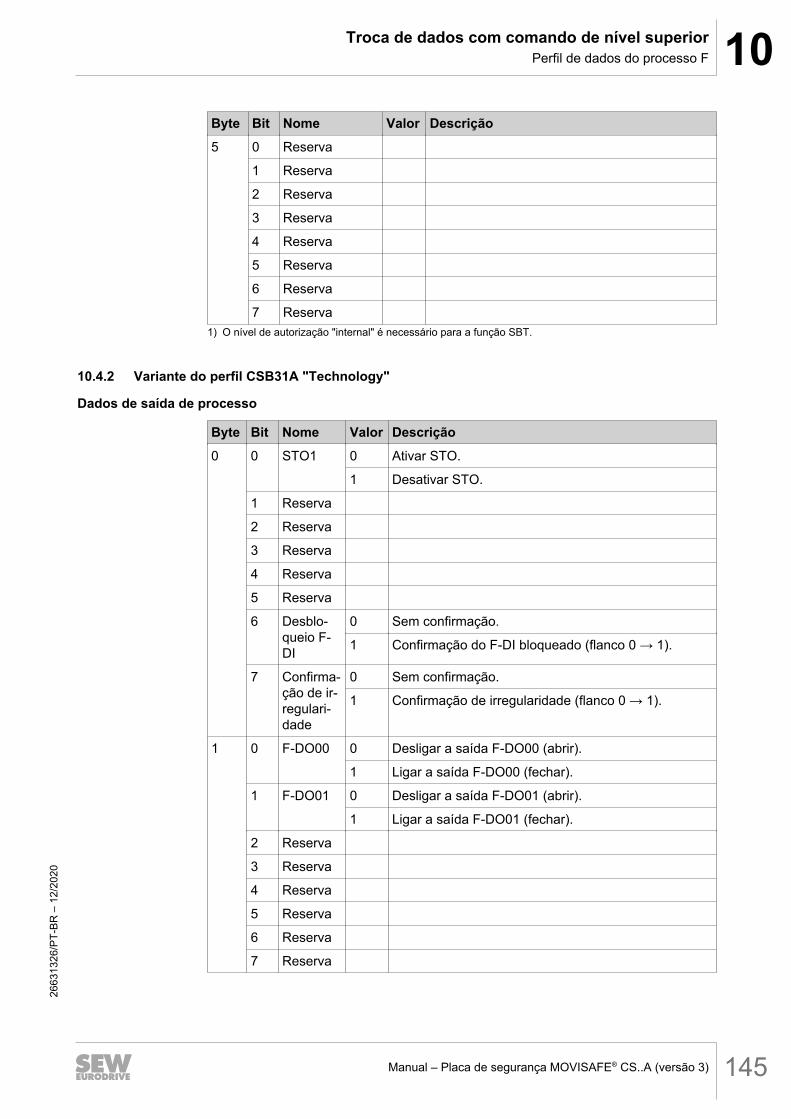
10Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 145
Byte Bit Nome Valor Descrição5 0 Reserva
1 Reserva
2 Reserva
3 Reserva
4 Reserva
5 Reserva
6 Reserva
7 Reserva1) O nível de autorização "internal" é necessário para a função SBT.
10.4.2 Variante do perfil CSB31A "Technology"
Dados de saída de processo
Byte Bit Nome Valor Descrição0 0 STO1 0 Ativar STO.
1 Desativar STO.
1 Reserva
2 Reserva
3 Reserva
4 Reserva
5 Reserva
6 Desblo-queio F-DI
0 Sem confirmação.
1 Confirmação do F-DI bloqueado (flanco 0 → 1).
7 Confirma-ção de ir-regulari-dade
0 Sem confirmação.
1 Confirmação de irregularidade (flanco 0 → 1).
1 0 F-DO00 0 Desligar a saída F-DO00 (abrir).
1 Ligar a saída F-DO00 (fechar).
1 F-DO01 0 Desligar a saída F-DO01 (abrir).
1 Ligar a saída F-DO01 (fechar).
2 Reserva
3 Reserva
4 Reserva
5 Reserva
6 Reserva
7 Reserva
2663
1326
/PT-
BR –
12/
2020
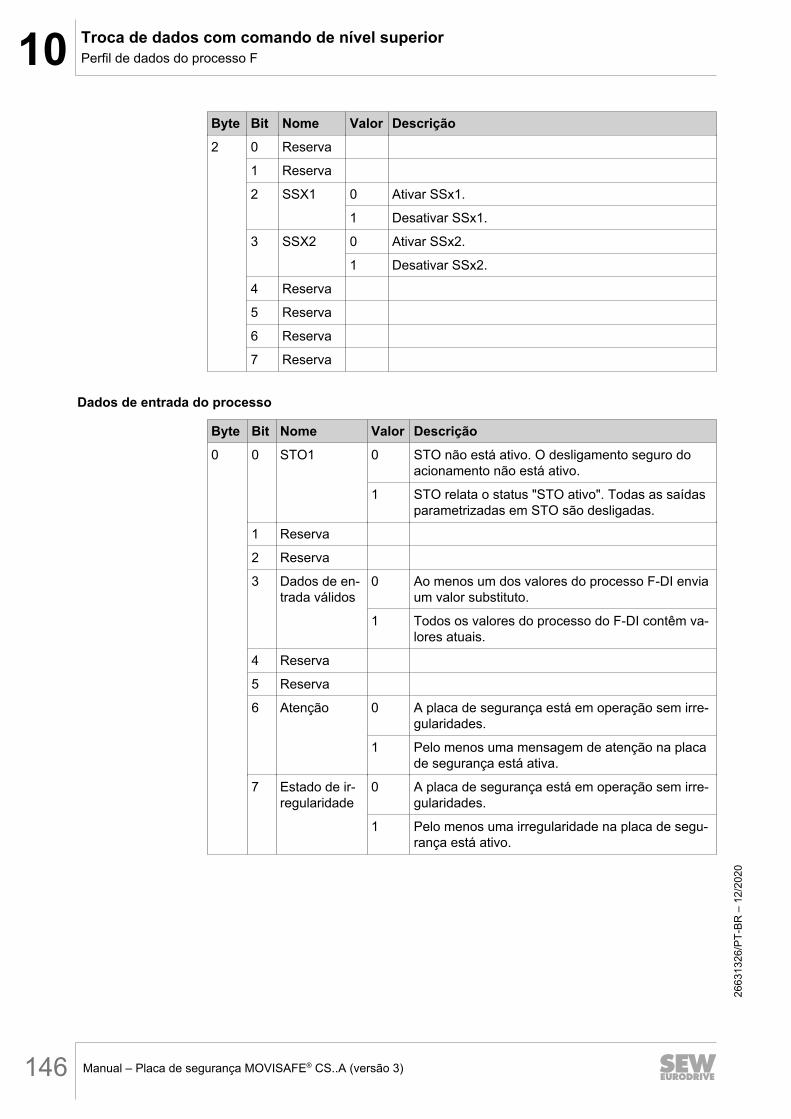
10 Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)146
Byte Bit Nome Valor Descrição2 0 Reserva
1 Reserva
2 SSX1 0 Ativar SSx1.
1 Desativar SSx1.
3 SSX2 0 Ativar SSx2.
1 Desativar SSx2.
4 Reserva
5 Reserva
6 Reserva
7 Reserva
Dados de entrada do processo
Byte Bit Nome Valor Descrição0 0 STO1 0 STO não está ativo. O desligamento seguro do
acionamento não está ativo.
1 STO relata o status "STO ativo". Todas as saídasparametrizadas em STO são desligadas.
1 Reserva
2 Reserva
3 Dados de en-trada válidos
0 Ao menos um dos valores do processo F-DI enviaum valor substituto.
1 Todos os valores do processo do F-DI contêm va-lores atuais.
4 Reserva
5 Reserva
6 Atenção 0 A placa de segurança está em operação sem irre-gularidades.
1 Pelo menos uma mensagem de atenção na placade segurança está ativa.
7 Estado de ir-regularidade
0 A placa de segurança está em operação sem irre-gularidades.
1 Pelo menos uma irregularidade na placa de segu-rança está ativo.
2663
1326
/PT-
BR –
12/
2020
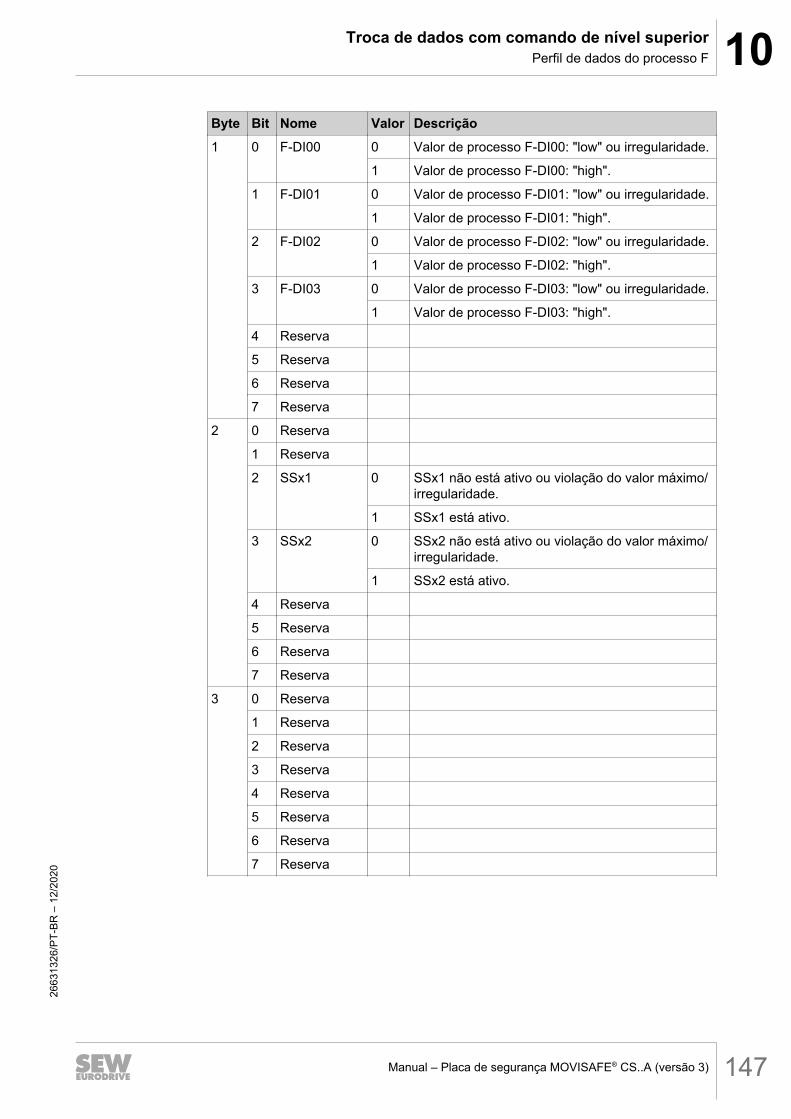
10Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 147
Byte Bit Nome Valor Descrição1 0 F-DI00 0 Valor de processo F-DI00: "low" ou irregularidade.
1 Valor de processo F-DI00: "high".
1 F-DI01 0 Valor de processo F-DI01: "low" ou irregularidade.
1 Valor de processo F-DI01: "high".
2 F-DI02 0 Valor de processo F-DI02: "low" ou irregularidade.
1 Valor de processo F-DI02: "high".
3 F-DI03 0 Valor de processo F‑DI03: "low" ou irregularidade.
1 Valor de processo F‑DI03: "high".
4 Reserva
5 Reserva
6 Reserva
7 Reserva
2 0 Reserva
1 Reserva
2 SSx1 0 SSx1 não está ativo ou violação do valor máximo/irregularidade.
1 SSx1 está ativo.
3 SSx2 0 SSx2 não está ativo ou violação do valor máximo/irregularidade.
1 SSx2 está ativo.
4 Reserva
5 Reserva
6 Reserva
7 Reserva
3 0 Reserva
1 Reserva
2 Reserva
3 Reserva
4 Reserva
5 Reserva
6 Reserva
7 Reserva
2663
1326
/PT-
BR –
12/
2020
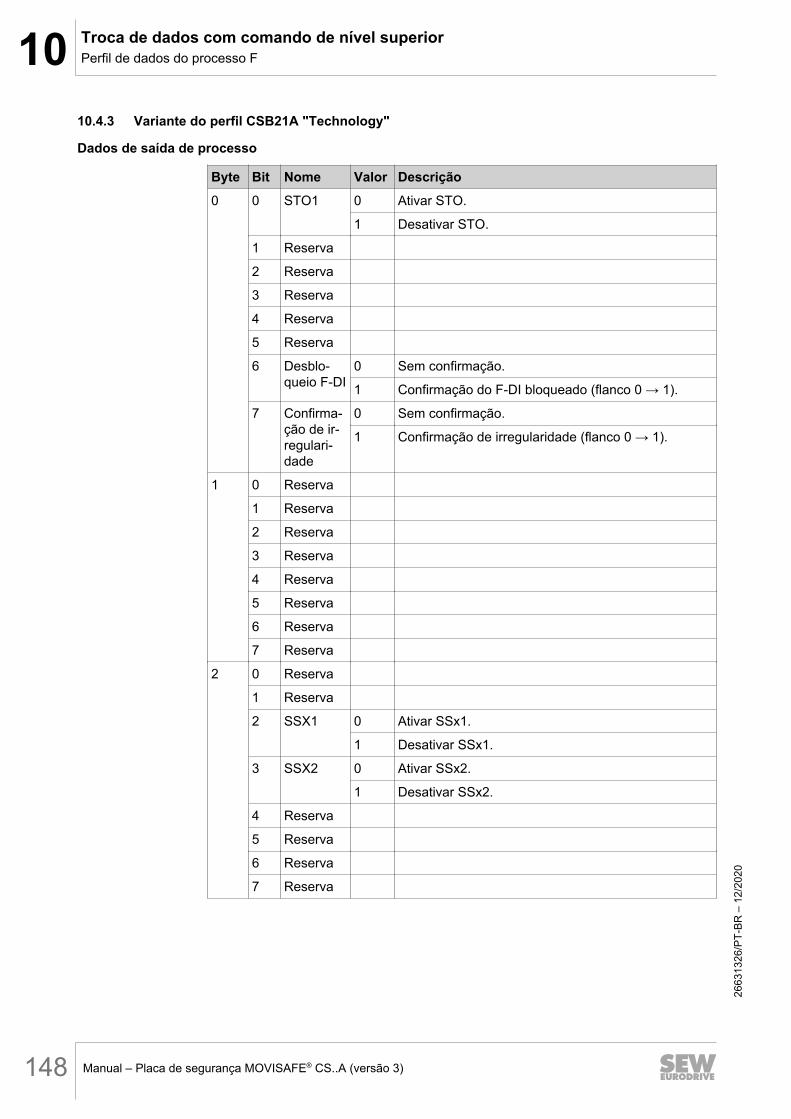
10 Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)148
10.4.3 Variante do perfil CSB21A "Technology"
Dados de saída de processo
Byte Bit Nome Valor Descrição0 0 STO1 0 Ativar STO.
1 Desativar STO.
1 Reserva
2 Reserva
3 Reserva
4 Reserva
5 Reserva
6 Desblo-queio F-DI
0 Sem confirmação.
1 Confirmação do F-DI bloqueado (flanco 0 → 1).
7 Confirma-ção de ir-regulari-dade
0 Sem confirmação.
1 Confirmação de irregularidade (flanco 0 → 1).
1 0 Reserva
1 Reserva
2 Reserva
3 Reserva
4 Reserva
5 Reserva
6 Reserva
7 Reserva
2 0 Reserva
1 Reserva
2 SSX1 0 Ativar SSx1.
1 Desativar SSx1.
3 SSX2 0 Ativar SSx2.
1 Desativar SSx2.
4 Reserva
5 Reserva
6 Reserva
7 Reserva
2663
1326
/PT-
BR –
12/
2020
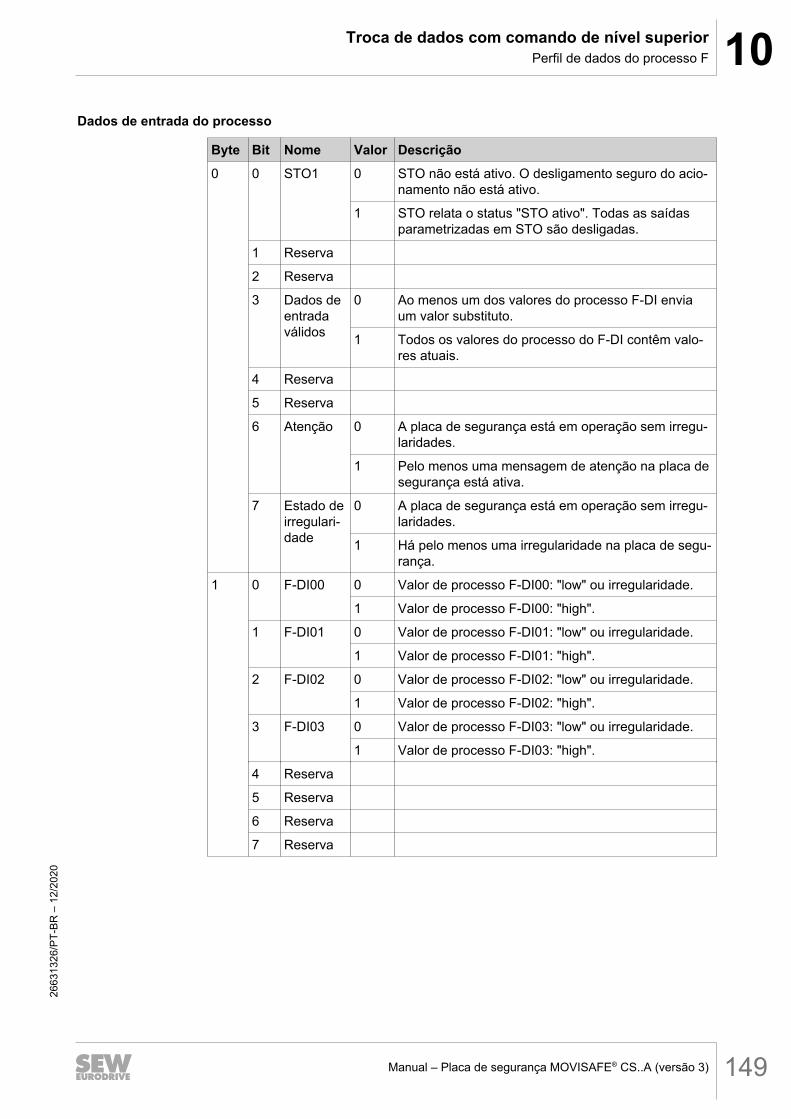
10Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 149
Dados de entrada do processo
Byte Bit Nome Valor Descrição0 0 STO1 0 STO não está ativo. O desligamento seguro do acio-
namento não está ativo.
1 STO relata o status "STO ativo". Todas as saídasparametrizadas em STO são desligadas.
1 Reserva
2 Reserva
3 Dados deentradaválidos
0 Ao menos um dos valores do processo F-DI enviaum valor substituto.
1 Todos os valores do processo do F-DI contêm valo-res atuais.
4 Reserva
5 Reserva
6 Atenção 0 A placa de segurança está em operação sem irregu-laridades.
1 Pelo menos uma mensagem de atenção na placa desegurança está ativa.
7 Estado deirregulari-dade
0 A placa de segurança está em operação sem irregu-laridades.
1 Há pelo menos uma irregularidade na placa de segu-rança.
1 0 F-DI00 0 Valor de processo F-DI00: "low" ou irregularidade.
1 Valor de processo F-DI00: "high".
1 F-DI01 0 Valor de processo F-DI01: "low" ou irregularidade.
1 Valor de processo F-DI01: "high".
2 F-DI02 0 Valor de processo F-DI02: "low" ou irregularidade.
1 Valor de processo F-DI02: "high".
3 F-DI03 0 Valor de processo F‑DI03: "low" ou irregularidade.
1 Valor de processo F‑DI03: "high".
4 Reserva
5 Reserva
6 Reserva
7 Reserva
2663
1326
/PT-
BR –
12/
2020
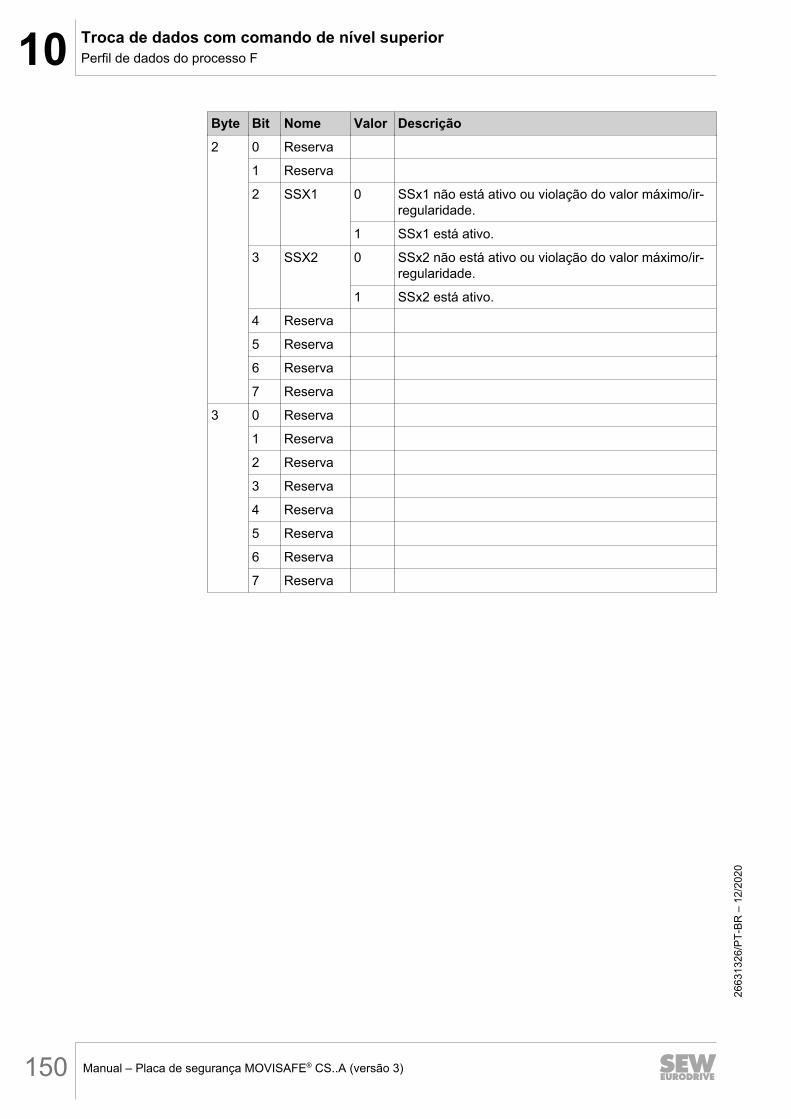
10 Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)150
Byte Bit Nome Valor Descrição2 0 Reserva
1 Reserva
2 SSX1 0 SSx1 não está ativo ou violação do valor máximo/ir-regularidade.
1 SSx1 está ativo.
3 SSX2 0 SSx2 não está ativo ou violação do valor máximo/ir-regularidade.
1 SSx2 está ativo.
4 Reserva
5 Reserva
6 Reserva
7 Reserva
3 0 Reserva
1 Reserva
2 Reserva
3 Reserva
4 Reserva
5 Reserva
6 Reserva
7 Reserva
2663
1326
/PT-
BR –
12/
2020
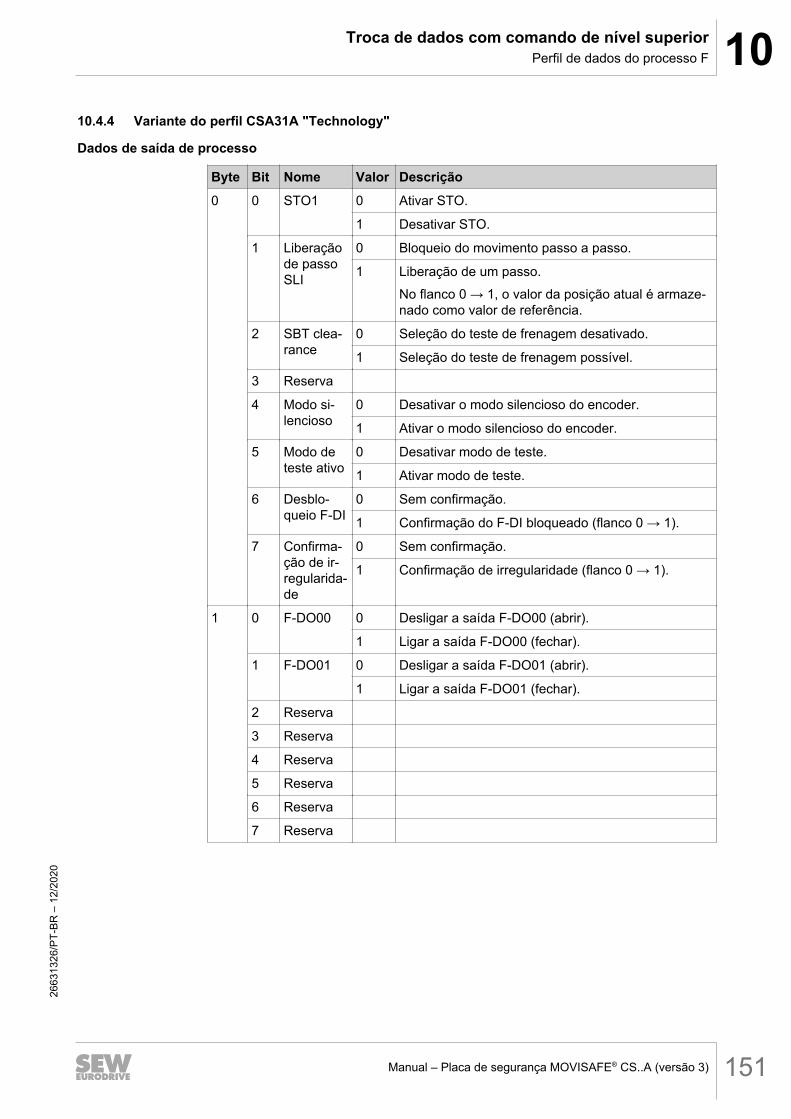
10Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 151
10.4.4 Variante do perfil CSA31A "Technology"
Dados de saída de processo
Byte Bit Nome Valor Descrição0 0 STO1 0 Ativar STO.
1 Desativar STO.
1 Liberaçãode passoSLI
0 Bloqueio do movimento passo a passo.
1 Liberação de um passo.No flanco 0 → 1, o valor da posição atual é armaze-nado como valor de referência.
2 SBT clea-rance
0 Seleção do teste de frenagem desativado.
1 Seleção do teste de frenagem possível.
3 Reserva
4 Modo si-lencioso
0 Desativar o modo silencioso do encoder.
1 Ativar o modo silencioso do encoder.
5 Modo deteste ativo
0 Desativar modo de teste.
1 Ativar modo de teste.
6 Desblo-queio F-DI
0 Sem confirmação.
1 Confirmação do F-DI bloqueado (flanco 0 → 1).
7 Confirma-ção de ir-regularida-de
0 Sem confirmação.
1 Confirmação de irregularidade (flanco 0 → 1).
1 0 F-DO00 0 Desligar a saída F-DO00 (abrir).
1 Ligar a saída F-DO00 (fechar).
1 F-DO01 0 Desligar a saída F-DO01 (abrir).
1 Ligar a saída F-DO01 (fechar).
2 Reserva
3 Reserva
4 Reserva
5 Reserva
6 Reserva
7 Reserva
2663
1326
/PT-
BR –
12/
2020
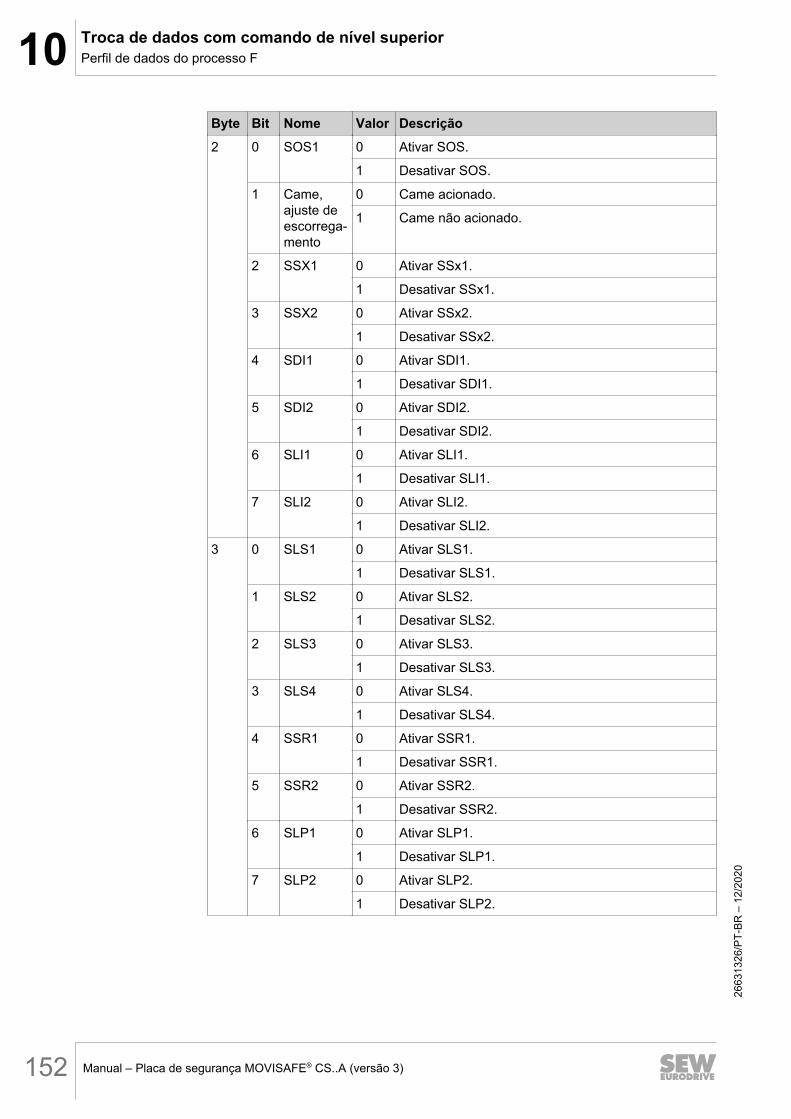
10 Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)152
Byte Bit Nome Valor Descrição2 0 SOS1 0 Ativar SOS.
1 Desativar SOS.
1 Came,ajuste deescorrega-mento
0 Came acionado.
1 Came não acionado.
2 SSX1 0 Ativar SSx1.
1 Desativar SSx1.
3 SSX2 0 Ativar SSx2.
1 Desativar SSx2.
4 SDI1 0 Ativar SDI1.
1 Desativar SDI1.
5 SDI2 0 Ativar SDI2.
1 Desativar SDI2.
6 SLI1 0 Ativar SLI1.
1 Desativar SLI1.
7 SLI2 0 Ativar SLI2.
1 Desativar SLI2.
3 0 SLS1 0 Ativar SLS1.
1 Desativar SLS1.
1 SLS2 0 Ativar SLS2.
1 Desativar SLS2.
2 SLS3 0 Ativar SLS3.
1 Desativar SLS3.
3 SLS4 0 Ativar SLS4.
1 Desativar SLS4.
4 SSR1 0 Ativar SSR1.
1 Desativar SSR1.
5 SSR2 0 Ativar SSR2.
1 Desativar SSR2.
6 SLP1 0 Ativar SLP1.
1 Desativar SLP1.
7 SLP2 0 Ativar SLP2.
1 Desativar SLP2.
2663
1326
/PT-
BR –
12/
2020
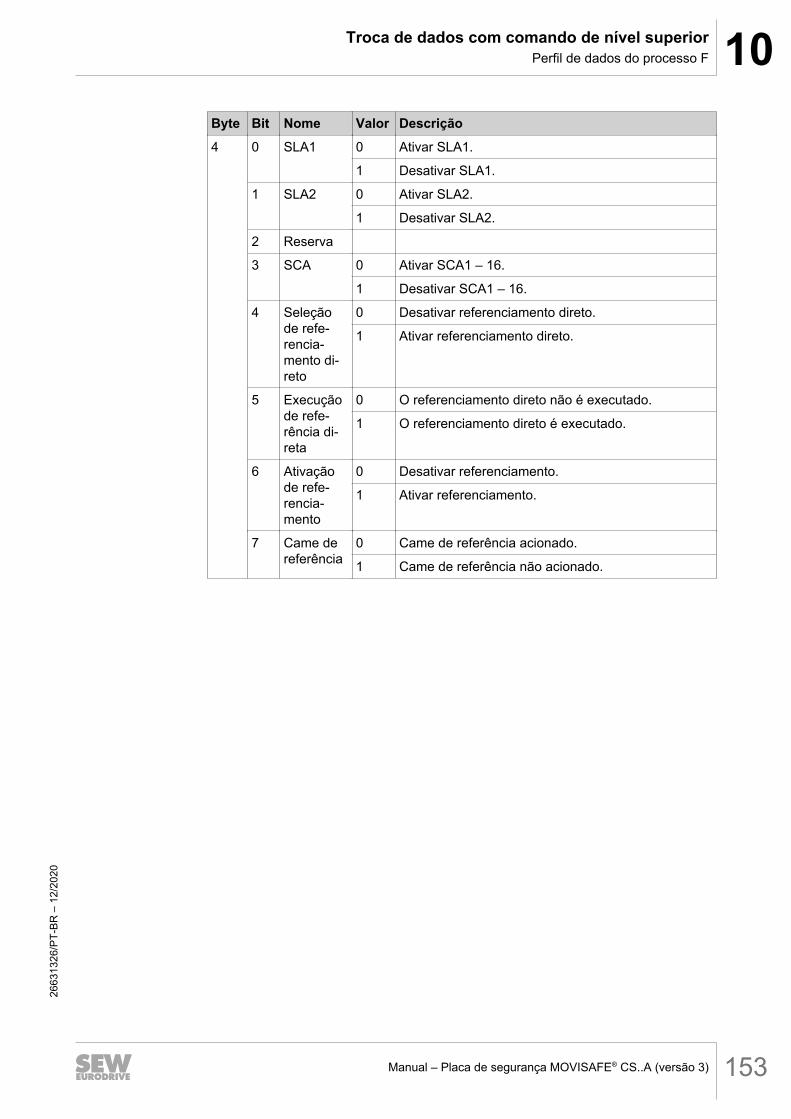
10Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 153
Byte Bit Nome Valor Descrição4 0 SLA1 0 Ativar SLA1.
1 Desativar SLA1.
1 SLA2 0 Ativar SLA2.
1 Desativar SLA2.
2 Reserva
3 SCA 0 Ativar SCA1 – 16.
1 Desativar SCA1 – 16.
4 Seleçãode refe-rencia-mento di-reto
0 Desativar referenciamento direto.
1 Ativar referenciamento direto.
5 Execuçãode refe-rência di-reta
0 O referenciamento direto não é executado.
1 O referenciamento direto é executado.
6 Ativaçãode refe-rencia-mento
0 Desativar referenciamento.
1 Ativar referenciamento.
7 Came dereferência
0 Came de referência acionado.
1 Came de referência não acionado.
2663
1326
/PT-
BR –
12/
2020
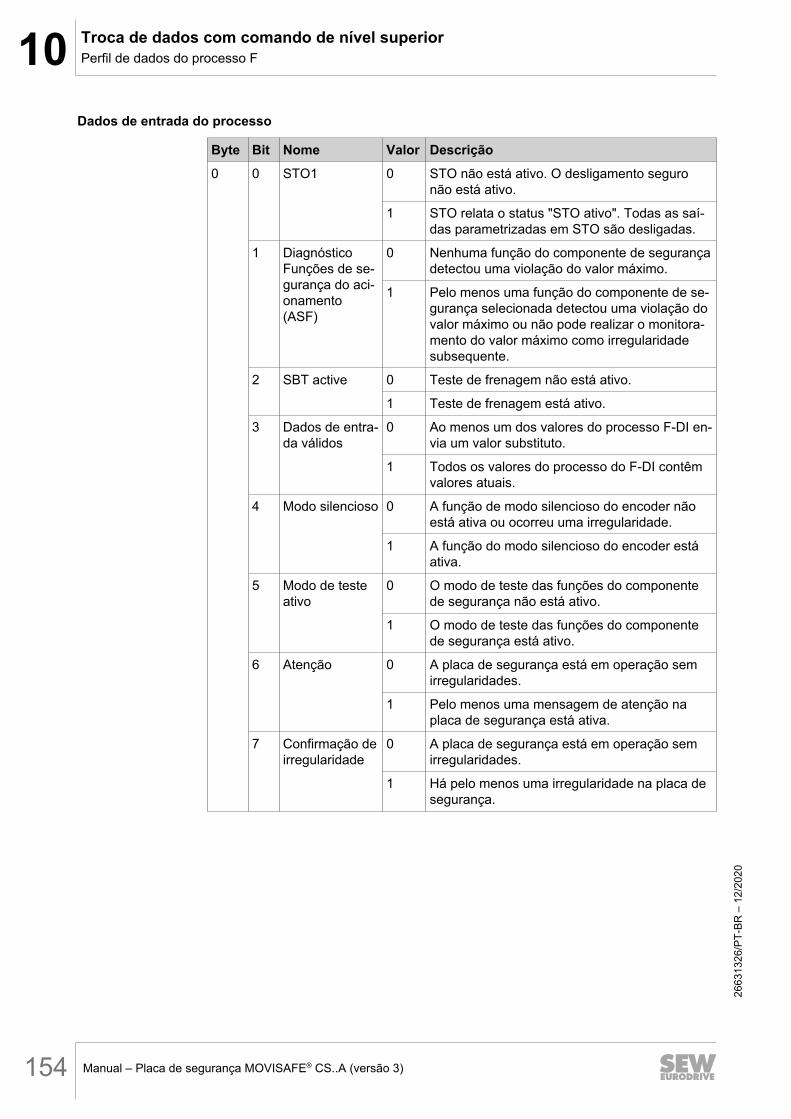
10 Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)154
Dados de entrada do processo
Byte Bit Nome Valor Descrição0 0 STO1 0 STO não está ativo. O desligamento seguro
não está ativo.
1 STO relata o status "STO ativo". Todas as saí-das parametrizadas em STO são desligadas.
1 DiagnósticoFunções de se-gurança do aci-onamento(ASF)
0 Nenhuma função do componente de segurançadetectou uma violação do valor máximo.
1 Pelo menos uma função do componente de se-gurança selecionada detectou uma violação dovalor máximo ou não pode realizar o monitora-mento do valor máximo como irregularidadesubsequente.
2 SBT active 0 Teste de frenagem não está ativo.
1 Teste de frenagem está ativo.
3 Dados de entra-da válidos
0 Ao menos um dos valores do processo F-DI en-via um valor substituto.
1 Todos os valores do processo do F-DI contêmvalores atuais.
4 Modo silencioso 0 A função de modo silencioso do encoder nãoestá ativa ou ocorreu uma irregularidade.
1 A função do modo silencioso do encoder estáativa.
5 Modo de testeativo
0 O modo de teste das funções do componentede segurança não está ativo.
1 O modo de teste das funções do componentede segurança está ativo.
6 Atenção 0 A placa de segurança está em operação semirregularidades.
1 Pelo menos uma mensagem de atenção naplaca de segurança está ativa.
7 Confirmação deirregularidade
0 A placa de segurança está em operação semirregularidades.
1 Há pelo menos uma irregularidade na placa desegurança.
2663
1326
/PT-
BR –
12/
2020
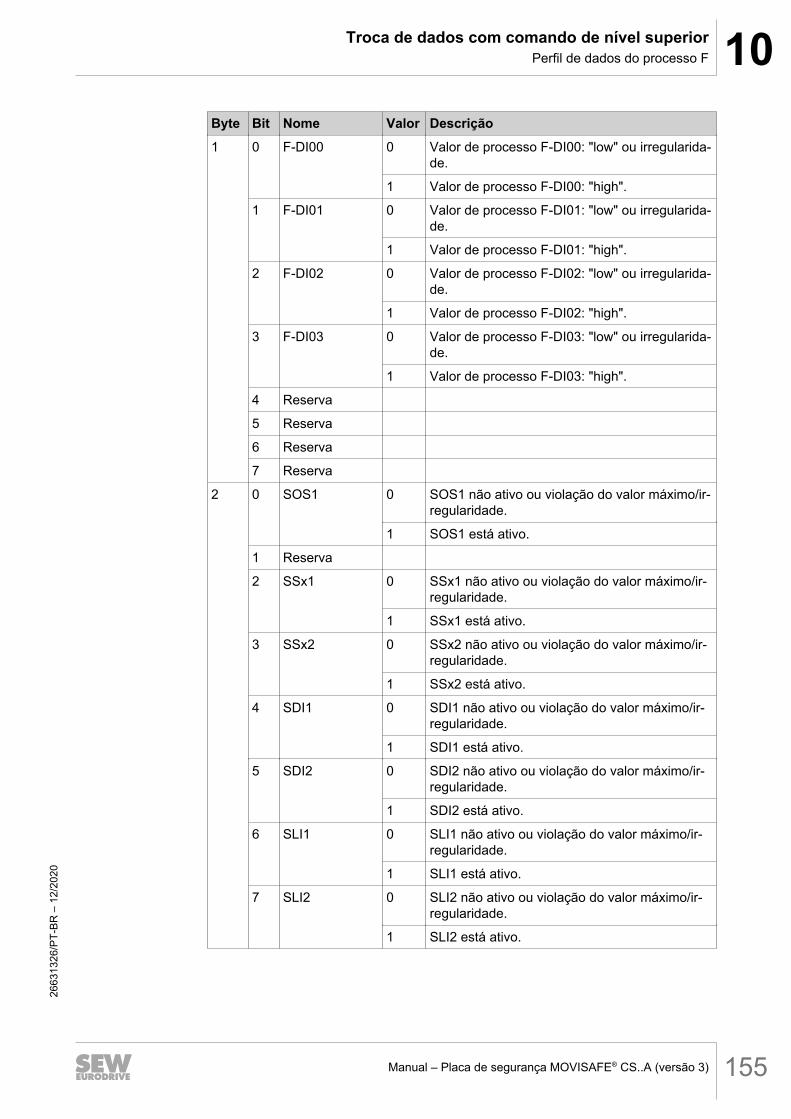
10Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 155
Byte Bit Nome Valor Descrição1 0 F-DI00 0 Valor de processo F‑DI00: "low" ou irregularida-
de.
1 Valor de processo F‑DI00: "high".
1 F-DI01 0 Valor de processo F‑DI01: "low" ou irregularida-de.
1 Valor de processo F‑DI01: "high".
2 F-DI02 0 Valor de processo F‑DI02: "low" ou irregularida-de.
1 Valor de processo F‑DI02: "high".
3 F-DI03 0 Valor de processo F‑DI03: "low" ou irregularida-de.
1 Valor de processo F‑DI03: "high".
4 Reserva
5 Reserva
6 Reserva
7 Reserva
2 0 SOS1 0 SOS1 não ativo ou violação do valor máximo/ir-regularidade.
1 SOS1 está ativo.
1 Reserva
2 SSx1 0 SSx1 não ativo ou violação do valor máximo/ir-regularidade.
1 SSx1 está ativo.
3 SSx2 0 SSx2 não ativo ou violação do valor máximo/ir-regularidade.
1 SSx2 está ativo.
4 SDI1 0 SDI1 não ativo ou violação do valor máximo/ir-regularidade.
1 SDI1 está ativo.
5 SDI2 0 SDI2 não ativo ou violação do valor máximo/ir-regularidade.
1 SDI2 está ativo.
6 SLI1 0 SLI1 não ativo ou violação do valor máximo/ir-regularidade.
1 SLI1 está ativo.
7 SLI2 0 SLI2 não ativo ou violação do valor máximo/ir-regularidade.
1 SLI2 está ativo.
2663
1326
/PT-
BR –
12/
2020
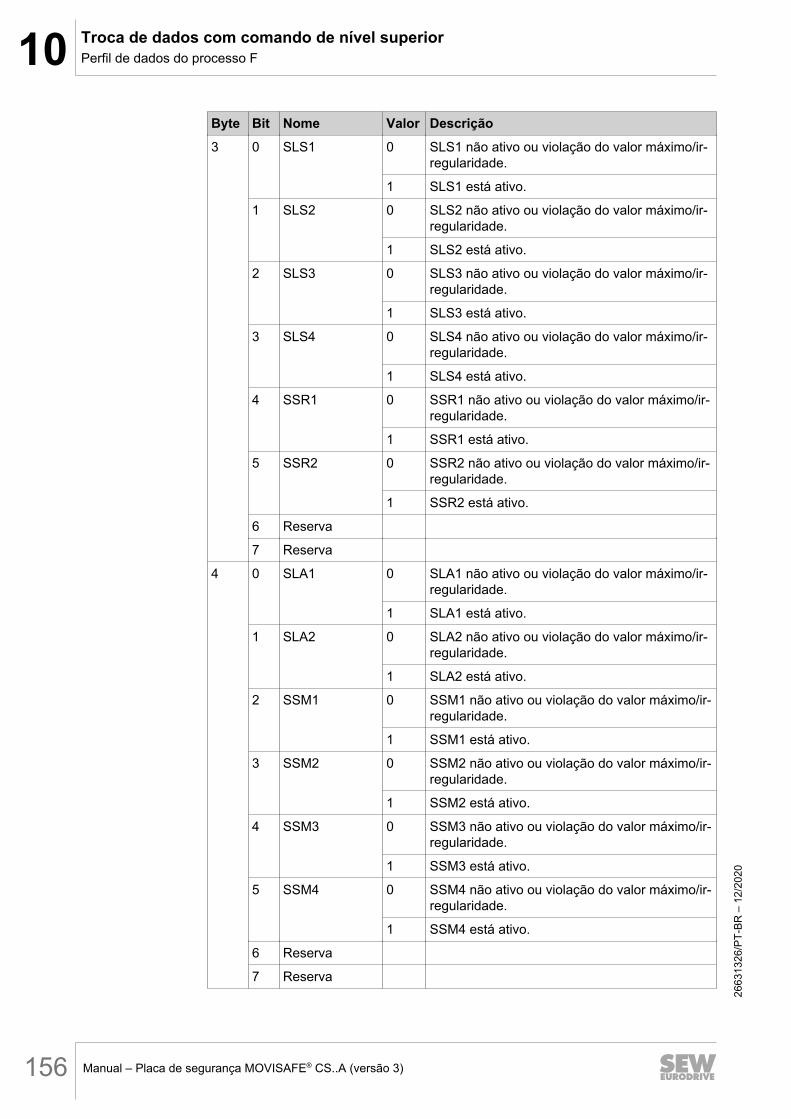
10 Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)156
Byte Bit Nome Valor Descrição3 0 SLS1 0 SLS1 não ativo ou violação do valor máximo/ir-
regularidade.
1 SLS1 está ativo.
1 SLS2 0 SLS2 não ativo ou violação do valor máximo/ir-regularidade.
1 SLS2 está ativo.
2 SLS3 0 SLS3 não ativo ou violação do valor máximo/ir-regularidade.
1 SLS3 está ativo.
3 SLS4 0 SLS4 não ativo ou violação do valor máximo/ir-regularidade.
1 SLS4 está ativo.
4 SSR1 0 SSR1 não ativo ou violação do valor máximo/ir-regularidade.
1 SSR1 está ativo.
5 SSR2 0 SSR2 não ativo ou violação do valor máximo/ir-regularidade.
1 SSR2 está ativo.
6 Reserva
7 Reserva
4 0 SLA1 0 SLA1 não ativo ou violação do valor máximo/ir-regularidade.
1 SLA1 está ativo.
1 SLA2 0 SLA2 não ativo ou violação do valor máximo/ir-regularidade.
1 SLA2 está ativo.
2 SSM1 0 SSM1 não ativo ou violação do valor máximo/ir-regularidade.
1 SSM1 está ativo.
3 SSM2 0 SSM2 não ativo ou violação do valor máximo/ir-regularidade.
1 SSM2 está ativo.
4 SSM3 0 SSM3 não ativo ou violação do valor máximo/ir-regularidade.
1 SSM3 está ativo.
5 SSM4 0 SSM4 não ativo ou violação do valor máximo/ir-regularidade.
1 SSM4 está ativo.
6 Reserva
7 Reserva
2663
1326
/PT-
BR –
12/
2020
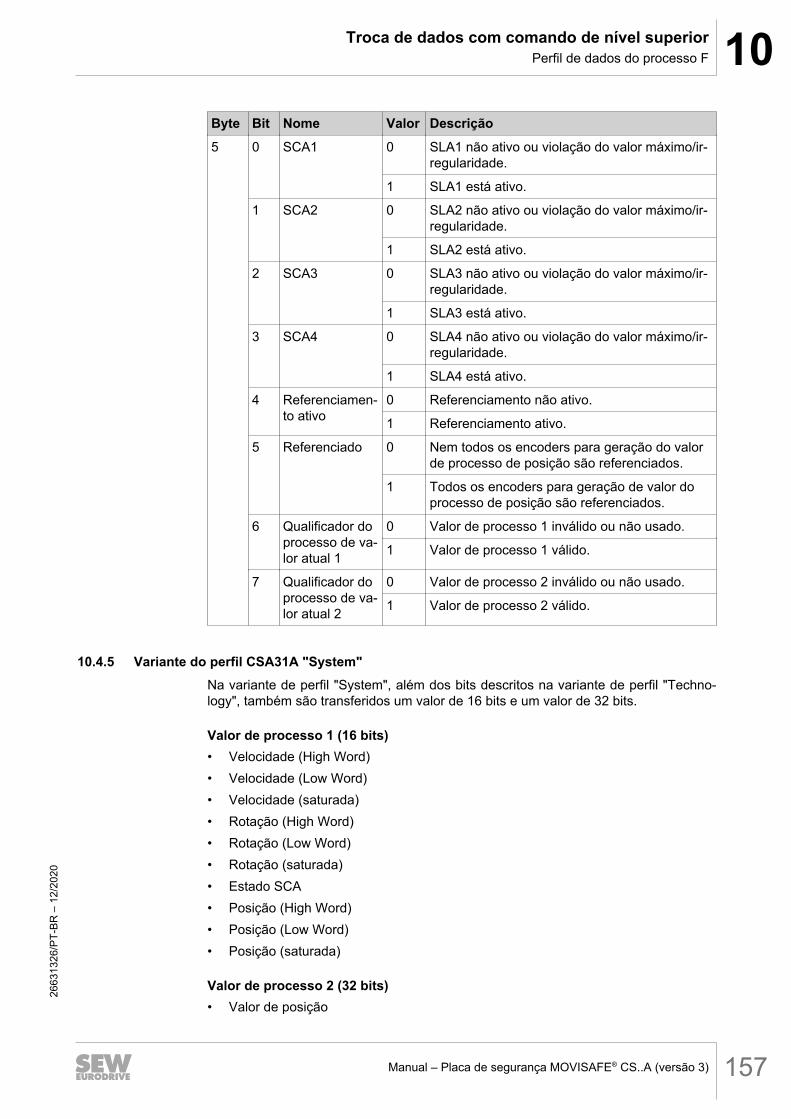
10Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 157
Byte Bit Nome Valor Descrição5 0 SCA1 0 SLA1 não ativo ou violação do valor máximo/ir-
regularidade.
1 SLA1 está ativo.
1 SCA2 0 SLA2 não ativo ou violação do valor máximo/ir-regularidade.
1 SLA2 está ativo.
2 SCA3 0 SLA3 não ativo ou violação do valor máximo/ir-regularidade.
1 SLA3 está ativo.
3 SCA4 0 SLA4 não ativo ou violação do valor máximo/ir-regularidade.
1 SLA4 está ativo.
4 Referenciamen-to ativo
0 Referenciamento não ativo.
1 Referenciamento ativo.
5 Referenciado 0 Nem todos os encoders para geração do valorde processo de posição são referenciados.
1 Todos os encoders para geração de valor doprocesso de posição são referenciados.
6 Qualificador doprocesso de va-lor atual 1
0 Valor de processo 1 inválido ou não usado.
1 Valor de processo 1 válido.
7 Qualificador doprocesso de va-lor atual 2
0 Valor de processo 2 inválido ou não usado.
1 Valor de processo 2 válido.
10.4.5 Variante do perfil CSA31A "System"Na variante de perfil "System", além dos bits descritos na variante de perfil "Techno-logy", também são transferidos um valor de 16 bits e um valor de 32 bits.
Valor de processo 1 (16 bits)• Velocidade (High Word)• Velocidade (Low Word)• Velocidade (saturada)• Rotação (High Word)• Rotação (Low Word)• Rotação (saturada)• Estado SCA• Posição (High Word)• Posição (Low Word)• Posição (saturada)
Valor de processo 2 (32 bits)• Valor de posição
2663
1326
/PT-
BR –
12/
2020
10 Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)158
• Velocidade• Rotação• Valor da posição Encoder 1• Valor da posição Encoder 2• Valor da posição Encoder 3
NOTAOs valores da posição brutos correspondem aos valores da posição que são envia-dos pelos encoders à placa de segurança para avaliação técnica de segurança.
Os valores de velocidade, rotação e posição são processados na placa de segurançaCSA31A como valores de 32 bits.O valor da velocidade também contém as casas decimais parametrizadas. Uma velo-cidade com 2 casas decimais é, por ex., v = 1234.56 mm/s. O valor numérico internoé 123456. Isso significa que existe um número 1 na High Word e 57920 na Low Word.Para que a velocidade possa ser representada em Low Word, a velocidade com umacasa decimal não deve ultrapassar o valor +/- 3276.7 em unidades do usuário. Se ointervalo de números de Low Word for ultrapassado, o valor congela em 32767. Estacondição é denominada "saturada".O valor de rotação é apresentado em unidades do sistema. O valor numérico é mos-trado em 1E-4 min-1.
10.4.6 Valores substitutos dos dados de entrada do processo (F-PE)Para todos os dados do processo (F-PE) decorrentes da placa de segurança, o valor"0" é escrito como valor substituto. A exceção disso é o status da irregularidade. Parao status da irregularidade, o valor "1" é gravado como valor substituto se o protocoloestiver sem irregularidades. Se o protocolo F estiver com irregularidades, o valor "0"será gravado para o status da irregularidade.
10.4.7 Valores substitutos dos dados de saída do processo (F-PA)No controle F, todos os bits descritos como "Reserva" devem ser definidos como "0".Para as funções do componente de segurança que não são utilizadas, o bit para sele-ção deve ser definido através dos dados de saída de processo seguros (F-PA), casocontrário, uma irregularidade no sistema de encoder causará imediatamente uma irre-gularidade no encoder.
10.4.8 Avaliação de flanco dos dados do processo F-DIObservar os seguintes pontos para a avaliação de flanco dos dados do processo F-DIno comando de nível superior para funções relevantes para a segurança:• Somente o flanco 0 → 1 pode ser usado. O flanco 1 → 0 não deve ser usado por-
que pode ocorrer a qualquer momento durante a transição para o estado seguro,por ex., se for detectada uma irregularidade ou uma interrupção do cabo.
• O comando de nível superior somente pode avaliar o flanco se o bit de dados doprocesso mudar de 0 para 1 e o "Qualificador de dados do processo" for "OK" tan-to para o valor "0" do bit de dados do processo quanto para o valor "1" do bit dedados do processo (posição lógica 1). Se estiver definido como "Irregularida-de" (posição lógica 0), o flanco deve ser ignorado.
2663
1326
/PT-
BR –
12/
2020

10Troca de dados com comando de nível superiorPerfil de dados do processo F
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 159
• Garante-se que todos os flancos avaliados no comando de nível superior estavamrealmente presentes no borne de entrada F-DI.
• Não pode ser garantido que todos os flancos que ocorrem no borne de entrada F-DI serão detectados pelo comando de nível superior. Isso é bastante importantese houver um defeito na placa de segurança ou no cabeamento.
2663
1326
/PT-
BR –
12/
2020
11 Tempos de respostaCálculo dos tempos de resposta
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)160
11 Tempos de respostaO tempo de resposta tem um papel importante na concepção e execução de funçõesdo componente de segurança em sistemas e máquinas. Para adequar o tempo deresposta às exigências de uma função do componente de segurança, é necessáriosempre considerar o sistema inteiro, desde o sensor (ou dispositivo de controle) até oatuador. Em combinação com a placa de segurança MOVISAFE® CS..A, os seguintestempos são determinantes:• Tempo de resposta dos sensores conectados• Duração do ciclo PROFIsafe• Tempo de processamento (duração do ciclo) no controlador de segurança• Tempo de monitoração PROFIsafe F_WD_Time• Tempos de resposta internos da placa de segurança MOVISAFE® CS..A• Tempo de resposta dos atuadores (p. ex., conversor de frequência)Estabelecer a sequência de respostas para cada função do componente de seguran-ça em sua aplicação e determinar respectivamente o tempo de resposta máximo, ob-servando as especificações relevantes do fabricante. Observar sobretudo os dadosda documentação de segurança do controlador de segurança utilizado.Informações sobre o tempo de resposta máximo da placa de segurança MOVISAFE®
CS..A podem ser encontradas no capítulo "Dados técnicos". Mais informações sobrea consideração dos tempos de resposta para a comunicação PROFIsafe segura en-contram-se na respectiva norma IEC 61784‑3‑3.
11.1 Cálculo dos tempos de respostaOs seguintes tempos de resposta são atribuídos de modo fixo:• T_Sys = 4 ms (duração do ciclo do sistema)• T_Task = 0.5 ms (duração do ciclo do sistema)• Tempo de resposta à irregularidade máximo T_FRZ = 9 ms aplica-se para desligar a
saída interna F-DO_STO e as saídas digitais seguras F-DO. externas e para defi-nir o status da irregularidade dos dados de entrada do processo seguro (F-PE).
• Os tempos de resposta das placas de segurança em relação às saídas digitais se-guras (F-DO) aplicam-se a cargas ôhmicas ≤30 kΩ.
2663
1326
/PT-
BR –
12/
2020
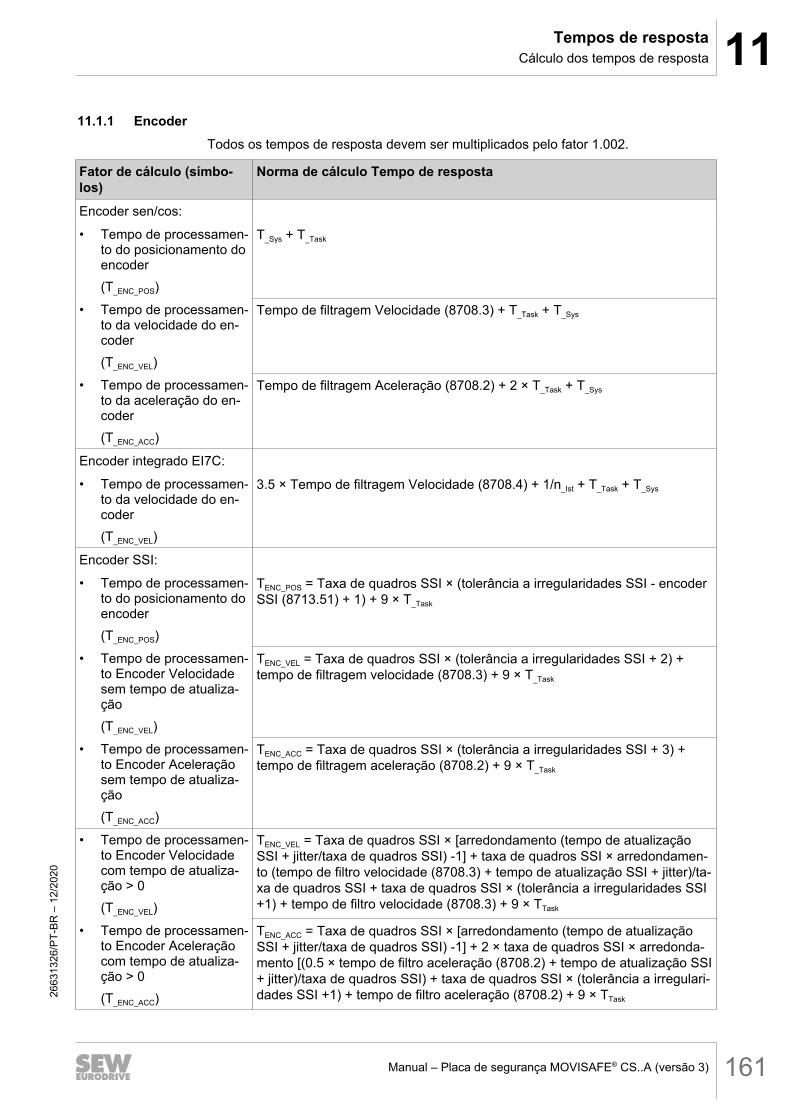
11Tempos de respostaCálculo dos tempos de resposta
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 161
11.1.1 EncoderTodos os tempos de resposta devem ser multiplicados pelo fator 1.002.
Fator de cálculo (símbo-los)
Norma de cálculo Tempo de resposta
Encoder sen/cos:
• Tempo de processamen-to do posicionamento doencoder(T_ENC_POS)
T_Sys + T_Task
• Tempo de processamen-to da velocidade do en-coder(T_ENC_VEL)
Tempo de filtragem Velocidade (8708.3) + T_Task + T_Sys
• Tempo de processamen-to da aceleração do en-coder(T_ENC_ACC)
Tempo de filtragem Aceleração (8708.2) + 2 × T_Task + T_Sys
Encoder integrado EI7C:
• Tempo de processamen-to da velocidade do en-coder(T_ENC_VEL)
3.5 × Tempo de filtragem Velocidade (8708.4) + 1/n_Ist + T_Task + T_Sys
Encoder SSI:
• Tempo de processamen-to do posicionamento doencoder(T_ENC_POS)
TENC_POS = Taxa de quadros SSI × (tolerância a irregularidades SSI - encoderSSI (8713.51) + 1) + 9 × T_Task
• Tempo de processamen-to Encoder Velocidadesem tempo de atualiza-ção(T_ENC_VEL)
TENC_VEL = Taxa de quadros SSI × (tolerância a irregularidades SSI + 2) +tempo de filtragem velocidade (8708.3) + 9 × T_Task
• Tempo de processamen-to Encoder Aceleraçãosem tempo de atualiza-ção(T_ENC_ACC)
TENC_ACC = Taxa de quadros SSI × (tolerância a irregularidades SSI + 3) +tempo de filtragem aceleração (8708.2) + 9 × T_Task
• Tempo de processamen-to Encoder Velocidadecom tempo de atualiza-ção > 0(T_ENC_VEL)
TENC_VEL = Taxa de quadros SSI × [arredondamento (tempo de atualizaçãoSSI + jitter/taxa de quadros SSI) -1] + taxa de quadros SSI × arredondamen-to (tempo de filtro velocidade (8708.3) + tempo de atualização SSI + jitter)/ta-xa de quadros SSI + taxa de quadros SSI × (tolerância a irregularidades SSI+1) + tempo de filtro velocidade (8708.3) + 9 × TTask
• Tempo de processamen-to Encoder Aceleraçãocom tempo de atualiza-ção > 0(T_ENC_ACC)
TENC_ACC = Taxa de quadros SSI × [arredondamento (tempo de atualizaçãoSSI + jitter/taxa de quadros SSI) -1] + 2 × taxa de quadros SSI × arredonda-mento [(0.5 × tempo de filtro aceleração (8708.2) + tempo de atualização SSI+ jitter)/taxa de quadros SSI) + taxa de quadros SSI × (tolerância a irregulari-dades SSI +1) + tempo de filtro aceleração (8708.2) + 9 × TTask26
6313
26/P
T-BR
– 1
2/20
20
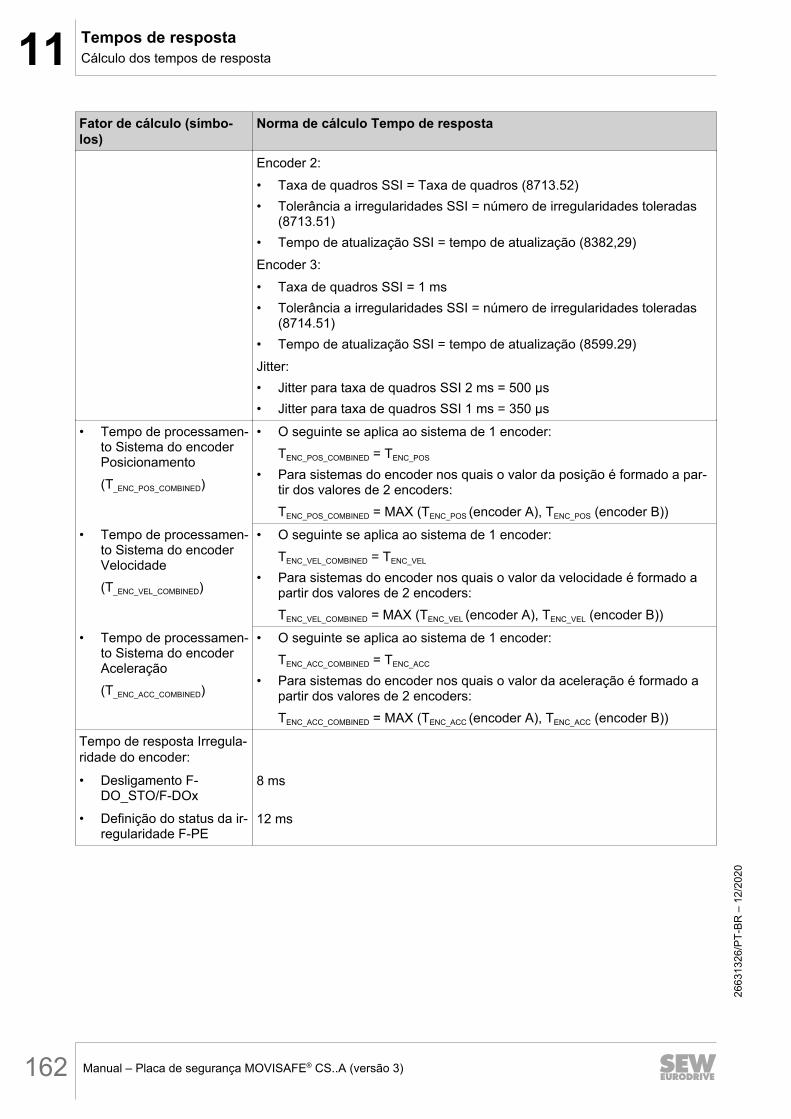
11 Tempos de respostaCálculo dos tempos de resposta
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)162
Fator de cálculo (símbo-los)
Norma de cálculo Tempo de resposta
Encoder 2:• Taxa de quadros SSI = Taxa de quadros (8713.52)• Tolerância a irregularidades SSI = número de irregularidades toleradas
(8713.51)• Tempo de atualização SSI = tempo de atualização (8382,29)Encoder 3:• Taxa de quadros SSI = 1 ms• Tolerância a irregularidades SSI = número de irregularidades toleradas
(8714.51)• Tempo de atualização SSI = tempo de atualização (8599.29)Jitter:• Jitter para taxa de quadros SSI 2 ms = 500 µs• Jitter para taxa de quadros SSI 1 ms = 350 µs
• Tempo de processamen-to Sistema do encoderPosicionamento(T_ENC_POS_COMBINED)
• O seguinte se aplica ao sistema de 1 encoder:TENC_POS_COMBINED = TENC_POS
• Para sistemas do encoder nos quais o valor da posição é formado a par-tir dos valores de 2 encoders:TENC_POS_COMBINED = MAX (TENC_POS (encoder A), TENC_POS (encoder B))
• Tempo de processamen-to Sistema do encoderVelocidade(T_ENC_VEL_COMBINED)
• O seguinte se aplica ao sistema de 1 encoder:TENC_VEL_COMBINED = TENC_VEL
• Para sistemas do encoder nos quais o valor da velocidade é formado apartir dos valores de 2 encoders:TENC_VEL_COMBINED = MAX (TENC_VEL (encoder A), TENC_VEL (encoder B))
• Tempo de processamen-to Sistema do encoderAceleração(T_ENC_ACC_COMBINED)
• O seguinte se aplica ao sistema de 1 encoder:TENC_ACC_COMBINED = TENC_ACC
• Para sistemas do encoder nos quais o valor da aceleração é formado apartir dos valores de 2 encoders:TENC_ACC_COMBINED = MAX (TENC_ACC (encoder A), TENC_ACC (encoder B))
Tempo de resposta Irregula-ridade do encoder:
• Desligamento F-DO_STO/F-DOx
8 ms
• Definição do status da ir-regularidade F‑PE
12 ms
2663
1326
/PT-
BR –
12/
2020

11Tempos de respostaCálculo dos tempos de resposta
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 163
11.1.2 Entrada digital segura F-DITodos os tempos de resposta devem ser multiplicados pelo fator 1.002.
Fator de cálculo (símbolos) Norma de cálculo Tempo de respostaTempo de processamento de entrada aoselecionar F-DI(T_processamento de entrada_F-DI)
Tempo de filtragem de entrada (8704.2) + 2 ms + T_Sys +350 µs
Processamento de entrada ao desmarcarF‑DI:(T_processamento de entrada_F-DI_Desmarcação)
• 1 canal Tempo de filtragem de entrada (8704.2) + 51 ms + T_Sys +350 µs
• 2 canal Tempo de filtragem de entrada (8704.2) + 2 ms + T_Sys +350 µs
Tempo de resposta do diagnóstico de ca-bos
30 ms (os tempos de resposta das funções do componentede segurança não são levados em consideração)
11.1.3 Comunicação seguraOs tempos de resposta para uma comunicação segura sempre se referem ao proto-colo seguro e não à interface externa da placa de segurança. Todos os tempos deresposta devem ser multiplicados pelo fator 1.002.
Fator de cálculo (símbolos) Norma de cálculo Tempo de respostaTempo de processamento de entrada atra-vés de dados de saída do processo segu-ros(T_processamento de entrada_F-PA)
2 × T_Task + T_Sys
Tempo de resposta Seleção (F‑DIx deacordo com F‑PE)
T_processamento de entrada_F-DIx + TSys
Tempo de resposta (F-PA de acordo comF-DOx)
T_processamento de entrada_F-PA + TSys
Tempo de resposta (posição segura (SP)de acordo com F-PE)
T_ENC_POS_COMBINED × TSys
Tempo de resposta (velocidade segura(SV) de acordo com F - PE)
T_ENC_VEL_COMBINED × TSys
2663
1326
/PT-
BR –
12/
2020
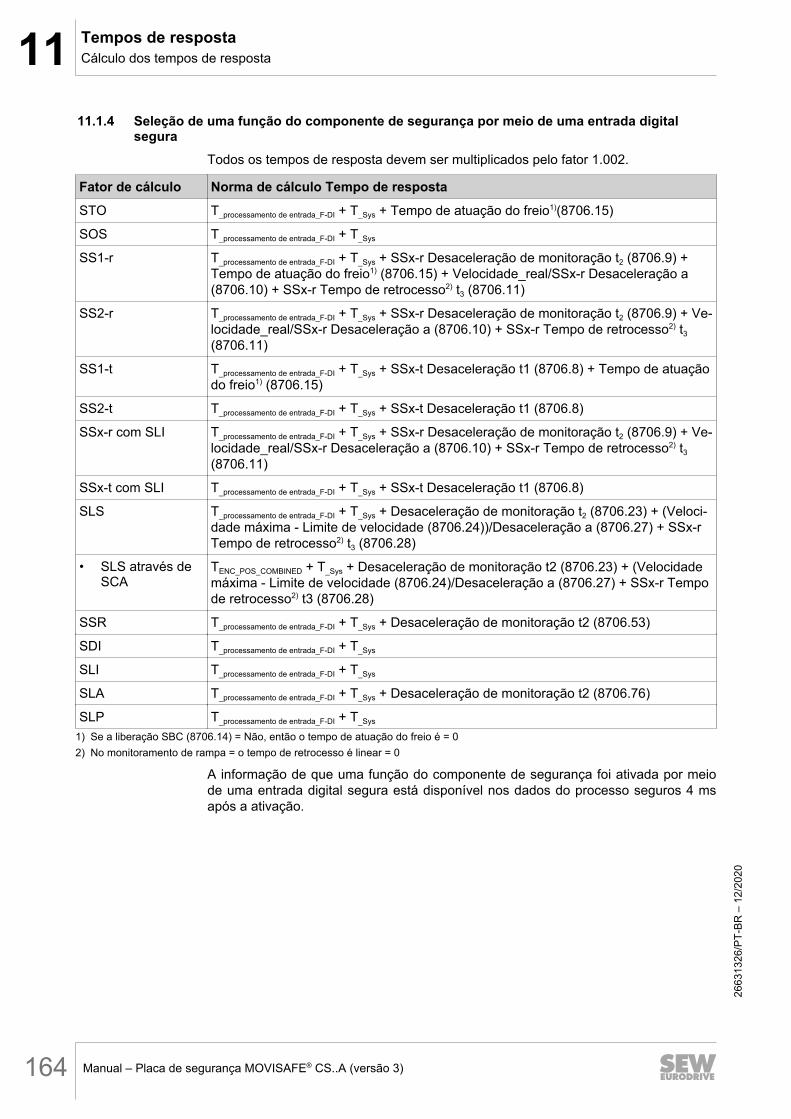
11 Tempos de respostaCálculo dos tempos de resposta
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)164
11.1.4 Seleção de uma função do componente de segurança por meio de uma entrada digitalsegura
Todos os tempos de resposta devem ser multiplicados pelo fator 1.002.
Fator de cálculo Norma de cálculo Tempo de respostaSTO T_processamento de entrada_F-DI + T_Sys + Tempo de atuação do freio1)(8706.15)
SOS T_processamento de entrada_F-DI + T_Sys
SS1-r T_processamento de entrada_F-DI + T_Sys + SSx-r Desaceleração de monitoração t2 (8706.9) +Tempo de atuação do freio1) (8706.15) + Velocidade_real/SSx-r Desaceleração a(8706.10) + SSx-r Tempo de retrocesso2) t3 (8706.11)
SS2-r T_processamento de entrada_F-DI + T_Sys + SSx-r Desaceleração de monitoração t2 (8706.9) + Ve-locidade_real/SSx-r Desaceleração a (8706.10) + SSx-r Tempo de retrocesso2) t3
(8706.11)
SS1-t T_processamento de entrada_F-DI + T_Sys + SSx-t Desaceleração t1 (8706.8) + Tempo de atuaçãodo freio1) (8706.15)
SS2-t T_processamento de entrada_F-DI + T_Sys + SSx-t Desaceleração t1 (8706.8)
SSx-r com SLI T_processamento de entrada_F-DI + T_Sys + SSx-r Desaceleração de monitoração t2 (8706.9) + Ve-locidade_real/SSx-r Desaceleração a (8706.10) + SSx-r Tempo de retrocesso2) t3
(8706.11)
SSx-t com SLI T_processamento de entrada_F-DI + T_Sys + SSx-t Desaceleração t1 (8706.8)
SLS T_processamento de entrada_F-DI + T_Sys + Desaceleração de monitoração t2 (8706.23) + (Veloci-dade máxima - Limite de velocidade (8706.24))/Desaceleração a (8706.27) + SSx-rTempo de retrocesso2) t3 (8706.28)
• SLS através deSCA
TENC_POS_COMBINED + T_Sys + Desaceleração de monitoração t2 (8706.23) + (Velocidademáxima - Limite de velocidade (8706.24)/Desaceleração a (8706.27) + SSx‑r Tempode retrocesso2) t3 (8706.28)
SSR T_processamento de entrada_F-DI + T_Sys + Desaceleração de monitoração t2 (8706.53)
SDI T_processamento de entrada_F-DI + T_Sys
SLI T_processamento de entrada_F-DI + T_Sys
SLA T_processamento de entrada_F-DI + T_Sys + Desaceleração de monitoração t2 (8706.76)
SLP T_processamento de entrada_F-DI + T_Sys
1) Se a liberação SBC (8706.14) = Não, então o tempo de atuação do freio é = 02) No monitoramento de rampa = o tempo de retrocesso é linear = 0
A informação de que uma função do componente de segurança foi ativada por meiode uma entrada digital segura está disponível nos dados do processo seguros 4 msapós a ativação.
2663
1326
/PT-
BR –
12/
2020
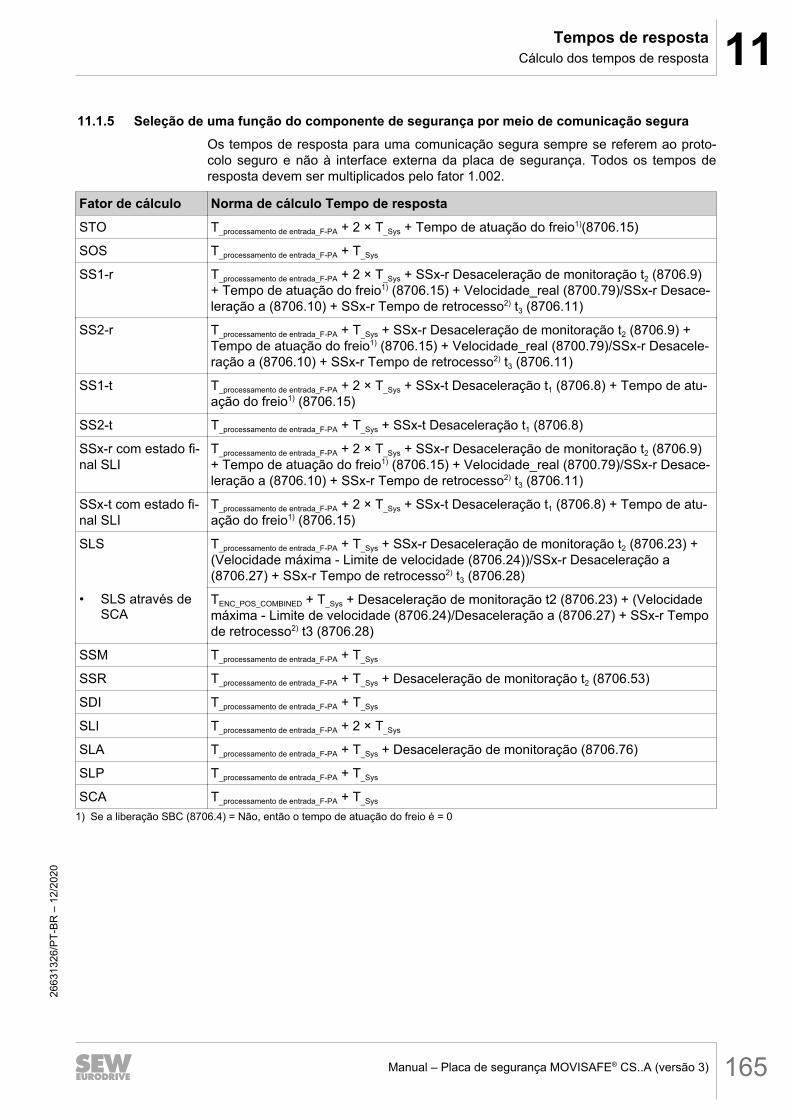
11Tempos de respostaCálculo dos tempos de resposta
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 165
11.1.5 Seleção de uma função do componente de segurança por meio de comunicação seguraOs tempos de resposta para uma comunicação segura sempre se referem ao proto-colo seguro e não à interface externa da placa de segurança. Todos os tempos deresposta devem ser multiplicados pelo fator 1.002.
Fator de cálculo Norma de cálculo Tempo de respostaSTO T_processamento de entrada_F-PA + 2 × T_Sys + Tempo de atuação do freio1)(8706.15)
SOS T_processamento de entrada_F-PA + T_Sys
SS1-r T_processamento de entrada_F-PA + 2 × T_Sys + SSx-r Desaceleração de monitoração t2 (8706.9)+ Tempo de atuação do freio1) (8706.15) + Velocidade_real (8700.79)/SSx-r Desace-leração a (8706.10) + SSx-r Tempo de retrocesso2) t3 (8706.11)
SS2-r T_processamento de entrada_F-PA + T_Sys + SSx-r Desaceleração de monitoração t2 (8706.9) +Tempo de atuação do freio1) (8706.15) + Velocidade_real (8700.79)/SSx-r Desacele-ração a (8706.10) + SSx-r Tempo de retrocesso2) t3 (8706.11)
SS1-t T_processamento de entrada_F-PA + 2 × T_Sys + SSx-t Desaceleração t1 (8706.8) + Tempo de atu-ação do freio1) (8706.15)
SS2-t T_processamento de entrada_F-PA + T_Sys + SSx-t Desaceleração t1 (8706.8)
SSx-r com estado fi-nal SLI
T_processamento de entrada_F-PA + 2 × T_Sys + SSx-r Desaceleração de monitoração t2 (8706.9)+ Tempo de atuação do freio1) (8706.15) + Velocidade_real (8700.79)/SSx-r Desace-leração a (8706.10) + SSx-r Tempo de retrocesso2) t3 (8706.11)
SSx-t com estado fi-nal SLI
T_processamento de entrada_F-PA + 2 × T_Sys + SSx-t Desaceleração t1 (8706.8) + Tempo de atu-ação do freio1) (8706.15)
SLS T_processamento de entrada_F-PA + T_Sys + SSx-r Desaceleração de monitoração t2 (8706.23) +(Velocidade máxima - Limite de velocidade (8706.24))/SSx-r Desaceleração a(8706.27) + SSx-r Tempo de retrocesso2) t3 (8706.28)
• SLS através deSCA
TENC_POS_COMBINED + T_Sys + Desaceleração de monitoração t2 (8706.23) + (Velocidademáxima - Limite de velocidade (8706.24)/Desaceleração a (8706.27) + SSx‑r Tempode retrocesso2) t3 (8706.28)
SSM T_processamento de entrada_F-PA + T_Sys
SSR T_processamento de entrada_F-PA + T_Sys + Desaceleração de monitoração t2 (8706.53)
SDI T_processamento de entrada_F-PA + T_Sys
SLI T_processamento de entrada_F-PA + 2 × T_Sys
SLA T_processamento de entrada_F-PA + T_Sys + Desaceleração de monitoração (8706.76)
SLP T_processamento de entrada_F-PA + T_Sys
SCA T_processamento de entrada_F-PA + T_Sys
1) Se a liberação SBC (8706.4) = Não, então o tempo de atuação do freio é = 0
2663
1326
/PT-
BR –
12/
2020
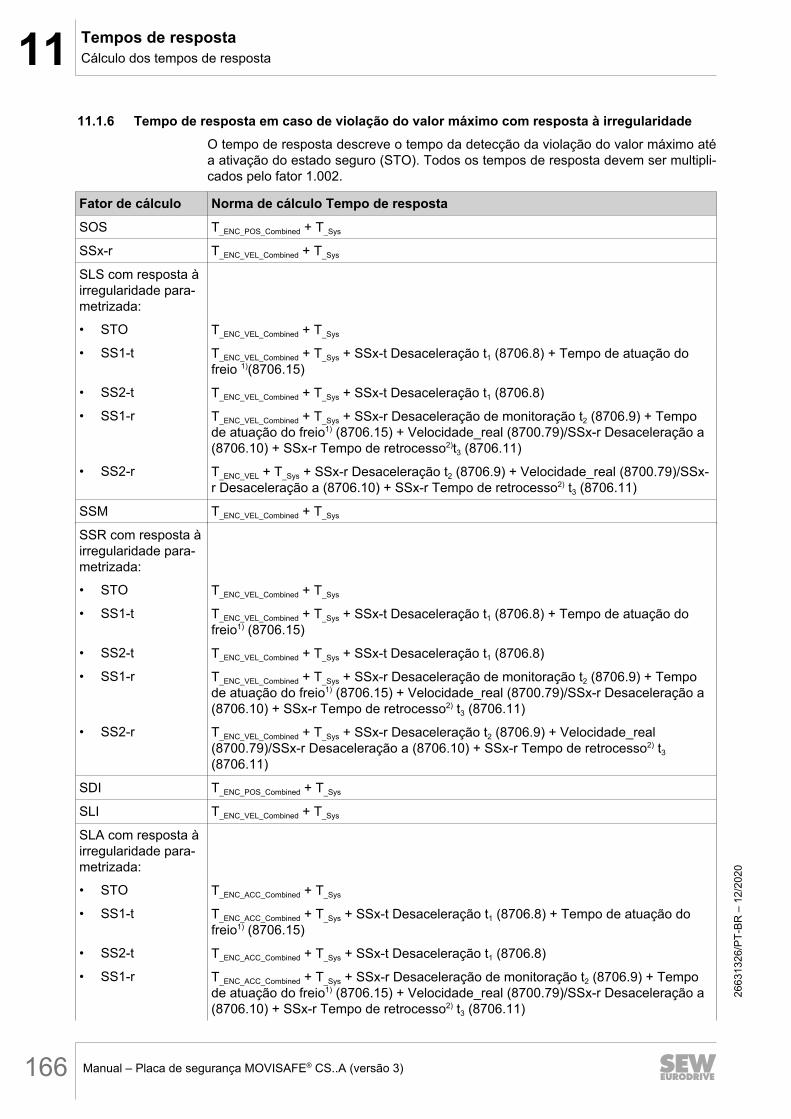
11 Tempos de respostaCálculo dos tempos de resposta
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)166
11.1.6 Tempo de resposta em caso de violação do valor máximo com resposta à irregularidadeO tempo de resposta descreve o tempo da detecção da violação do valor máximo atéa ativação do estado seguro (STO). Todos os tempos de resposta devem ser multipli-cados pelo fator 1.002.
Fator de cálculo Norma de cálculo Tempo de respostaSOS T_ENC_POS_Combined + T_Sys
SSx-r T_ENC_VEL_Combined + T_Sys
SLS com resposta àirregularidade para-metrizada:
• STO T_ENC_VEL_Combined + T_Sys
• SS1-t T_ENC_VEL_Combined + T_Sys + SSx-t Desaceleração t1 (8706.8) + Tempo de atuação dofreio 1)(8706.15)
• SS2-t T_ENC_VEL_Combined + T_Sys + SSx-t Desaceleração t1 (8706.8)
• SS1-r T_ENC_VEL_Combined + T_Sys + SSx-r Desaceleração de monitoração t2 (8706.9) + Tempode atuação do freio1) (8706.15) + Velocidade_real (8700.79)/SSx-r Desaceleração a(8706.10) + SSx-r Tempo de retrocesso2)t3 (8706.11)
• SS2-r T_ENC_VEL + T_Sys + SSx-r Desaceleração t2 (8706.9) + Velocidade_real (8700.79)/SSx-r Desaceleração a (8706.10) + SSx-r Tempo de retrocesso2) t3 (8706.11)
SSM T_ENC_VEL_Combined + T_Sys
SSR com resposta àirregularidade para-metrizada:
• STO T_ENC_VEL_Combined + T_Sys
• SS1-t T_ENC_VEL_Combined + T_Sys + SSx-t Desaceleração t1 (8706.8) + Tempo de atuação dofreio1) (8706.15)
• SS2-t T_ENC_VEL_Combined + T_Sys + SSx-t Desaceleração t1 (8706.8)
• SS1-r T_ENC_VEL_Combined + T_Sys + SSx-r Desaceleração de monitoração t2 (8706.9) + Tempode atuação do freio1) (8706.15) + Velocidade_real (8700.79)/SSx-r Desaceleração a(8706.10) + SSx-r Tempo de retrocesso2) t3 (8706.11)
• SS2-r T_ENC_VEL_Combined + T_Sys + SSx-r Desaceleração t2 (8706.9) + Velocidade_real(8700.79)/SSx-r Desaceleração a (8706.10) + SSx-r Tempo de retrocesso2) t3
(8706.11)
SDI T_ENC_POS_Combined + T_Sys
SLI T_ENC_VEL_Combined + T_Sys
SLA com resposta àirregularidade para-metrizada:
• STO T_ENC_ACC_Combined + T_Sys
• SS1-t T_ENC_ACC_Combined + T_Sys + SSx-t Desaceleração t1 (8706.8) + Tempo de atuação dofreio1) (8706.15)
• SS2-t T_ENC_ACC_Combined + T_Sys + SSx-t Desaceleração t1 (8706.8)
• SS1-r T_ENC_ACC_Combined + T_Sys + SSx-r Desaceleração de monitoração t2 (8706.9) + Tempode atuação do freio1) (8706.15) + Velocidade_real (8700.79)/SSx-r Desaceleração a(8706.10) + SSx-r Tempo de retrocesso2) t3 (8706.11)
2663
1326
/PT-
BR –
12/
2020
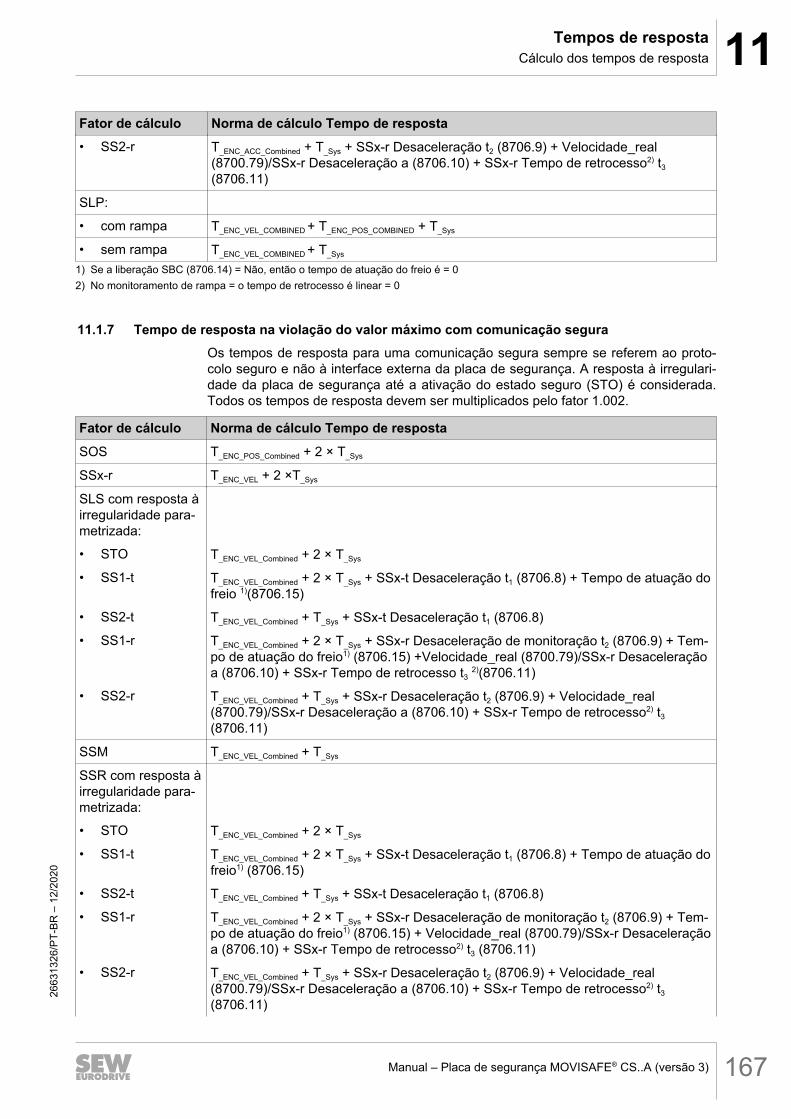
11Tempos de respostaCálculo dos tempos de resposta
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 167
Fator de cálculo Norma de cálculo Tempo de resposta• SS2-r T_ENC_ACC_Combined + T_Sys + SSx-r Desaceleração t2 (8706.9) + Velocidade_real
(8700.79)/SSx-r Desaceleração a (8706.10) + SSx-r Tempo de retrocesso2) t3
(8706.11)
SLP:
• com rampa T_ENC_VEL_COMBINED + T_ENC_POS_COMBINED + T_Sys
• sem rampa T_ENC_VEL_COMBINED + T_Sys
1) Se a liberação SBC (8706.14) = Não, então o tempo de atuação do freio é = 02) No monitoramento de rampa = o tempo de retrocesso é linear = 0
11.1.7 Tempo de resposta na violação do valor máximo com comunicação seguraOs tempos de resposta para uma comunicação segura sempre se referem ao proto-colo seguro e não à interface externa da placa de segurança. A resposta à irregulari-dade da placa de segurança até a ativação do estado seguro (STO) é considerada.Todos os tempos de resposta devem ser multiplicados pelo fator 1.002.
Fator de cálculo Norma de cálculo Tempo de respostaSOS T_ENC_POS_Combined + 2 × T_Sys
SSx-r T_ENC_VEL + 2 ×T_Sys
SLS com resposta àirregularidade para-metrizada:
• STO T_ENC_VEL_Combined + 2 × T_Sys
• SS1-t T_ENC_VEL_Combined + 2 × T_Sys + SSx-t Desaceleração t1 (8706.8) + Tempo de atuação dofreio 1)(8706.15)
• SS2-t T_ENC_VEL_Combined + T_Sys + SSx-t Desaceleração t1 (8706.8)
• SS1-r T_ENC_VEL_Combined + 2 × T_Sys + SSx-r Desaceleração de monitoração t2 (8706.9) + Tem-po de atuação do freio1) (8706.15) +Velocidade_real (8700.79)/SSx-r Desaceleraçãoa (8706.10) + SSx-r Tempo de retrocesso t3 2)(8706.11)
• SS2-r T_ENC_VEL_Combined + T_Sys + SSx-r Desaceleração t2 (8706.9) + Velocidade_real(8700.79)/SSx-r Desaceleração a (8706.10) + SSx-r Tempo de retrocesso2) t3
(8706.11)
SSM T_ENC_VEL_Combined + T_Sys
SSR com resposta àirregularidade para-metrizada:
• STO T_ENC_VEL_Combined + 2 × T_Sys
• SS1-t T_ENC_VEL_Combined + 2 × T_Sys + SSx-t Desaceleração t1 (8706.8) + Tempo de atuação dofreio1) (8706.15)
• SS2-t T_ENC_VEL_Combined + T_Sys + SSx-t Desaceleração t1 (8706.8)
• SS1-r T_ENC_VEL_Combined + 2 × T_Sys + SSx-r Desaceleração de monitoração t2 (8706.9) + Tem-po de atuação do freio1) (8706.15) + Velocidade_real (8700.79)/SSx-r Desaceleraçãoa (8706.10) + SSx-r Tempo de retrocesso2) t3 (8706.11)
• SS2-r T_ENC_VEL_Combined + T_Sys + SSx-r Desaceleração t2 (8706.9) + Velocidade_real(8700.79)/SSx-r Desaceleração a (8706.10) + SSx-r Tempo de retrocesso2) t3
(8706.11)
2663
1326
/PT-
BR –
12/
2020
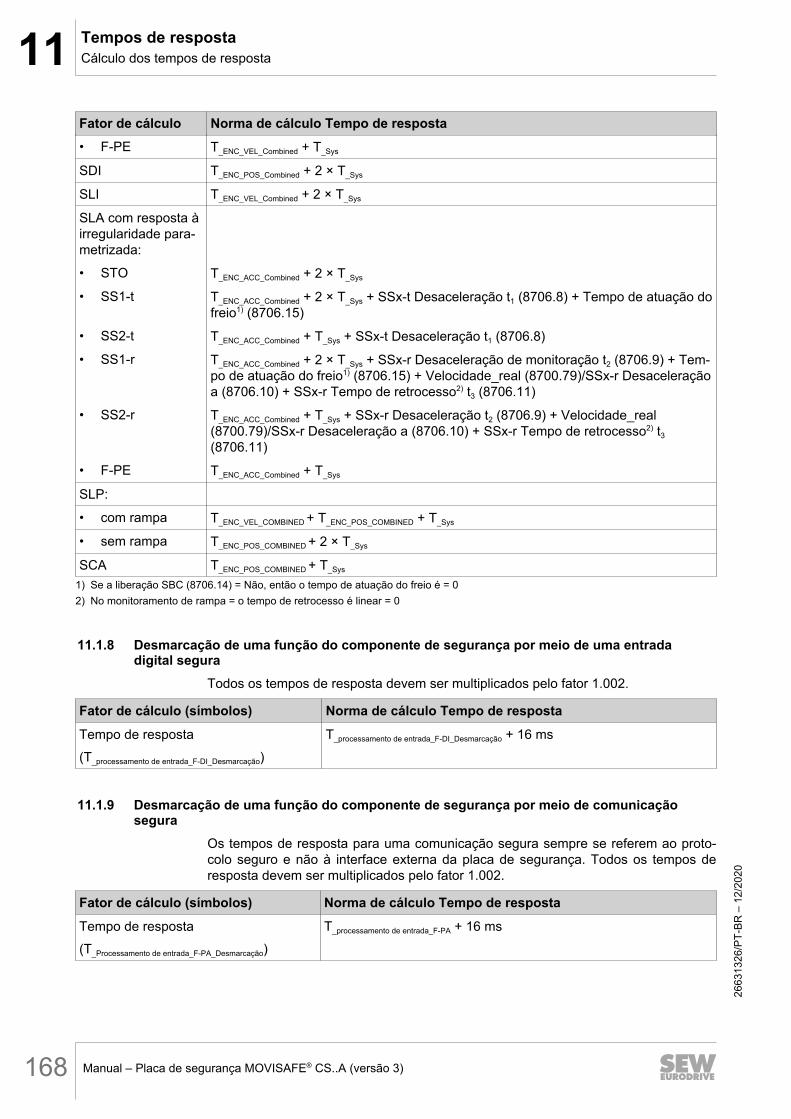
11 Tempos de respostaCálculo dos tempos de resposta
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)168
Fator de cálculo Norma de cálculo Tempo de resposta• F-PE T_ENC_VEL_Combined + T_Sys
SDI T_ENC_POS_Combined + 2 × T_Sys
SLI T_ENC_VEL_Combined + 2 × T_Sys
SLA com resposta àirregularidade para-metrizada:
• STO T_ENC_ACC_Combined + 2 × T_Sys
• SS1-t T_ENC_ACC_Combined + 2 × T_Sys + SSx-t Desaceleração t1 (8706.8) + Tempo de atuação dofreio1) (8706.15)
• SS2-t T_ENC_ACC_Combined + T_Sys + SSx-t Desaceleração t1 (8706.8)
• SS1-r T_ENC_ACC_Combined + 2 × T_Sys + SSx-r Desaceleração de monitoração t2 (8706.9) + Tem-po de atuação do freio1) (8706.15) + Velocidade_real (8700.79)/SSx-r Desaceleraçãoa (8706.10) + SSx-r Tempo de retrocesso2) t3 (8706.11)
• SS2-r T_ENC_ACC_Combined + T_Sys + SSx-r Desaceleração t2 (8706.9) + Velocidade_real(8700.79)/SSx-r Desaceleração a (8706.10) + SSx-r Tempo de retrocesso2) t3
(8706.11)
• F-PE T_ENC_ACC_Combined + T_Sys
SLP:
• com rampa T_ENC_VEL_COMBINED + T_ENC_POS_COMBINED + T_Sys
• sem rampa T_ENC_POS_COMBINED + 2 × T_Sys
SCA T_ENC_POS_COMBINED + T_Sys
1) Se a liberação SBC (8706.14) = Não, então o tempo de atuação do freio é = 02) No monitoramento de rampa = o tempo de retrocesso é linear = 0
11.1.8 Desmarcação de uma função do componente de segurança por meio de uma entradadigital segura
Todos os tempos de resposta devem ser multiplicados pelo fator 1.002.
Fator de cálculo (símbolos) Norma de cálculo Tempo de respostaTempo de resposta(T_processamento de entrada_F-DI_Desmarcação)
T_processamento de entrada_F-DI_Desmarcação + 16 ms
11.1.9 Desmarcação de uma função do componente de segurança por meio de comunicaçãosegura
Os tempos de resposta para uma comunicação segura sempre se referem ao proto-colo seguro e não à interface externa da placa de segurança. Todos os tempos deresposta devem ser multiplicados pelo fator 1.002.
Fator de cálculo (símbolos) Norma de cálculo Tempo de respostaTempo de resposta(T_Processamento de entrada_F-PA_Desmarcação)
T_processamento de entrada_F-PA + 16 ms
2663
1326
/PT-
BR –
12/
2020
12ServiceAlteração/Tratamento de alterações na unidade
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 169
12 Service
12.1 Alteração/Tratamento de alterações na unidade• Alterações no hardware
Se for necessário fazer alterações na placa de segurança CS..A, isto só pode serrealizado pela SEW‑EURODRIVE.
• Alterações no firmwareAlterações no firmware só podem ser realizadas pela SEW‑EURODRIVE.
• ReparoA placa de segurança CS..A só pode ser reparada na SEW‑EURODRIVE.
• Garantia
NOTAEm caso de manipulação interna por parte do usuário (p. ex., substituição de compo-nentes, soldagens realizadas pelo usuário), a certificação de segurança assim comoqualquer direito de garantia da SEW‑EURODRIVE perdem as suas validades.
12.2 Descarte de resíduosDescarte o produto e todas as peças separadamente de acordo com sua natureza eas regulamentações nacionais. Se disponível, recicle o produto ou entre em contatocom uma empresa de tratamento de resíduos. Se possível, separe o produto nas se-guintes categorias:• Alumínio• Cobre• Componentes eletrônicos• Plástico
2663
1326
/PT-
BR –
12/
2020
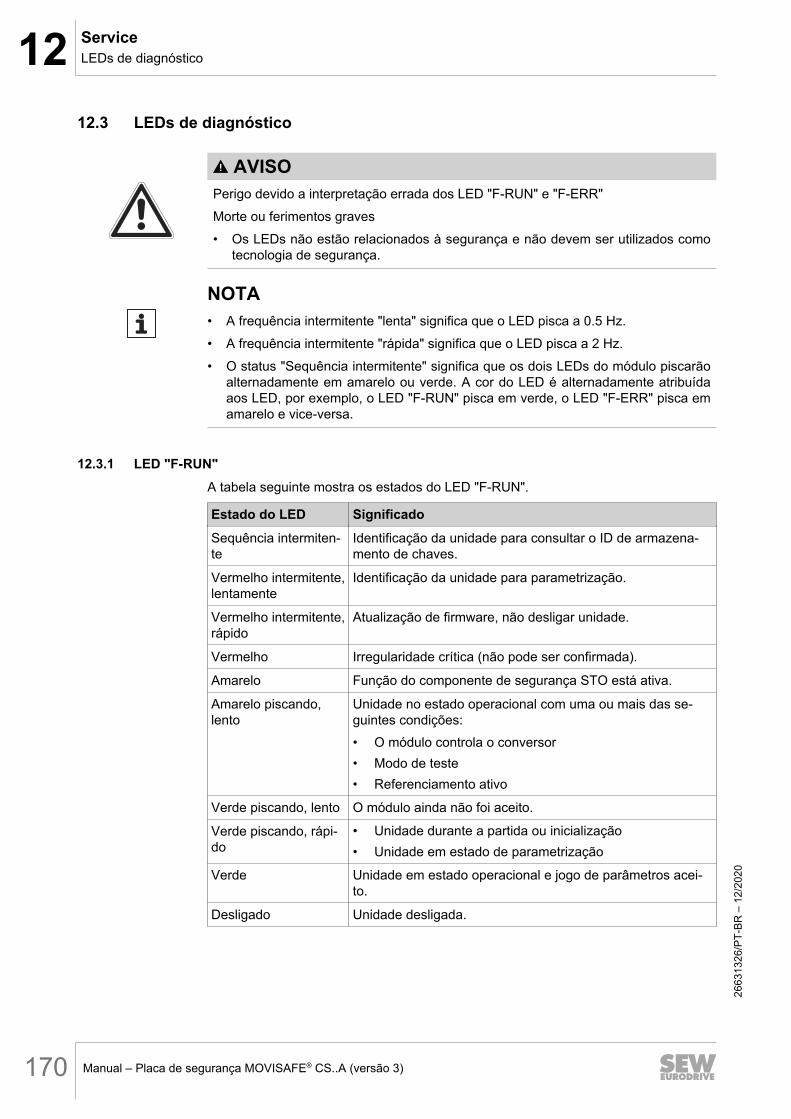
12 ServiceLEDs de diagnóstico
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)170
12.3 LEDs de diagnóstico
AVISOPerigo devido a interpretação errada dos LED "F-RUN" e "F-ERR"Morte ou ferimentos graves• Os LEDs não estão relacionados à segurança e não devem ser utilizados como
tecnologia de segurança.
NOTA• A frequência intermitente "lenta" significa que o LED pisca a 0.5 Hz.• A frequência intermitente "rápida" significa que o LED pisca a 2 Hz.• O status "Sequência intermitente" significa que os dois LEDs do módulo piscarão
alternadamente em amarelo ou verde. A cor do LED é alternadamente atribuídaaos LED, por exemplo, o LED "F-RUN" pisca em verde, o LED "F-ERR" pisca emamarelo e vice-versa.
12.3.1 LED "F-RUN"A tabela seguinte mostra os estados do LED "F-RUN".
Estado do LED SignificadoSequência intermiten-te
Identificação da unidade para consultar o ID de armazena-mento de chaves.
Vermelho intermitente,lentamente
Identificação da unidade para parametrização.
Vermelho intermitente,rápido
Atualização de firmware, não desligar unidade.
Vermelho Irregularidade crítica (não pode ser confirmada).
Amarelo Função do componente de segurança STO está ativa.
Amarelo piscando,lento
Unidade no estado operacional com uma ou mais das se-guintes condições:• O módulo controla o conversor• Modo de teste• Referenciamento ativo
Verde piscando, lento O módulo ainda não foi aceito.
Verde piscando, rápi-do
• Unidade durante a partida ou inicialização• Unidade em estado de parametrização
Verde Unidade em estado operacional e jogo de parâmetros acei-to.
Desligado Unidade desligada.
2663
1326
/PT-
BR –
12/
2020
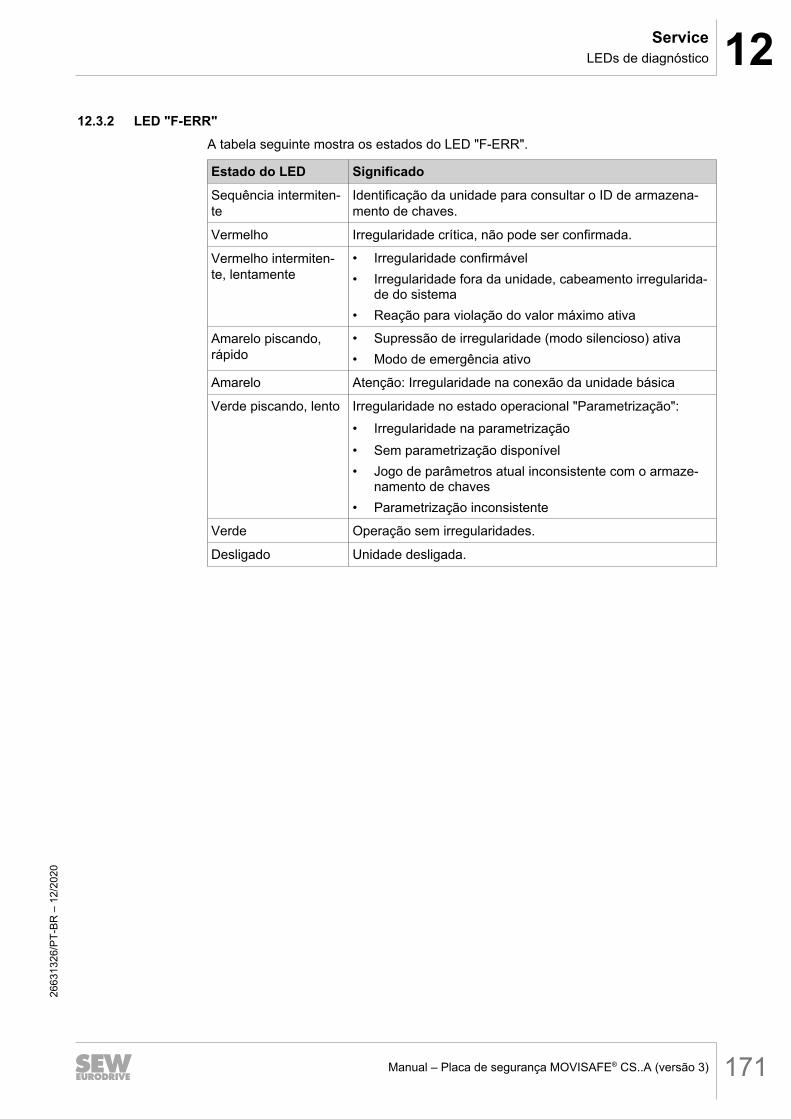
12ServiceLEDs de diagnóstico
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 171
12.3.2 LED "F-ERR"A tabela seguinte mostra os estados do LED "F-ERR".
Estado do LED SignificadoSequência intermiten-te
Identificação da unidade para consultar o ID de armazena-mento de chaves.
Vermelho Irregularidade crítica, não pode ser confirmada.
Vermelho intermiten-te, lentamente
• Irregularidade confirmável• Irregularidade fora da unidade, cabeamento irregularida-
de do sistema• Reação para violação do valor máximo ativa
Amarelo piscando,rápido
• Supressão de irregularidade (modo silencioso) ativa• Modo de emergência ativo
Amarelo Atenção: Irregularidade na conexão da unidade básica
Verde piscando, lento Irregularidade no estado operacional "Parametrização":• Irregularidade na parametrização• Sem parametrização disponível• Jogo de parâmetros atual inconsistente com o armaze-
namento de chaves• Parametrização inconsistente
Verde Operação sem irregularidades.
Desligado Unidade desligada.
2663
1326
/PT-
BR –
12/
2020
12 ServiceEstados de irregularidade da placa de segurança MOVISAFE® CS..A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)172
12.4 Estados de irregularidade da placa de segurança MOVISAFE® CS..AEstados deirregularidade da placadesegurançaMOVISAFE® CS..A
PERIGOA placa de segurança MOVISAFE® CS..A apresenta uma irregularidade e reiniciaautomaticamente nos seguintes casos:- A tensão de alimentação de 24 VCC foi desligada e religada.- A placa de segurança estava no modo de espera.- Algumas irregularidades do conversor foram confirmadas.Morte ou ferimentos graves• Para evitar o reinício automático nos casos acima mencionados, o parâmetro
Status da irregularidade após a inicialização (8703.240) deve ser parametrizadopara "Bloqueio de partida". O estado "bloqueio de partida" deve ser confirmado.
12.4.1 Classes de irregularidadeAs irregularidades ocorridas na placa de segurança são subdivididas em 5 classes deirregularidade distintas. Dependendo da classe de irregularidade, a resposta descritana tabela a seguir é realizada.
Classe da irregularidade RespostaMensagem. Entrada na memória de irregularidade, sem mais
nenhuma resposta.
Atenção. Entrada na memória de irregularidade, sem maisnenhuma resposta.
Irregularidade de saída, de entra-da e do encoder.
Entrada na memória de irregularidade e, se pos-sível, no estado seguro das entradas e saídas di-gitais.
Irregularidade do sistema. Entrada na memória de irregularidade e no esta-do seguro das entradas e saídas digitais.
Irregularidade crítica. Entrada na memória de irregularidade e no esta-do seguro das entradas e saídas digitais. Semcomunicação segura.
MensagemSe houver uma mensagem, nenhuma resposta à irregularidade será realizada. Umaentrada é realizada na memória de irregularidade. Além disso, o código de irregulari-dade correspondente é transmitido.
AtençãoSe houver uma mensagem de atenção, nenhuma resposta à irregularidade será reali-zada. Uma entrada é realizada na memória de irregularidade. Além disso, o código deirregularidade correspondente é transmitido.Uma mensagem de atenção é uma informação, por exemplo, sobre uma irregularida-de no sistema de encoder que, no momento da ocorrência, não tem nenhum efeito re-lacionado com a tecnologia de segurança, mas pode representar uma irregularidadeem outro momento.
2663
1326
/PT-
BR –
12/
2020
12ServiceEstados de irregularidade da placa de segurança MOVISAFE® CS..A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 173
Irregularidade de saída, de entrada e do encoderIrregularidade dasaída
Se a placa de segurança detectar uma irregularidade em uma saída digital segura, to-das as saídas digitais seguras serão comutadas para o estado seguro. Além disso, afunção do componente de segurança STO é ativada e a placa de segurança é coloca-da no estado seguro. No protocolo FS, os bits das saídas F-DO0 e F-DO1 são ajusta-dos para "0" e os bits para a função do componente de segurança STO e a irregulari-dade para "1".Além disso, o código de irregularidade correspondente é transmitido para a irregulari-dade de saída ocorrida.
Irregularidade daentrada
Se a placa de segurança detectar uma irregularidade em uma entrada digital segura,esta é comutada para o estado seguro. Se a entrada digital segura correspondenteestiver parametrizada com dois canais, ambas as entradas são comutadas para o es-tado seguro. No protocolo FS, os bits das entradas digitais seguras correspondentessão definidos como "0" e o bit de irregularidade como "1".Além disso, o código de irregularidade de entrada correspondente ocorrida é transmi-tido.
NOTASe uma entrada digital segura é atribuída através da atribuição de uma função docomponente de segurança, esta é selecionada em uma irregularidade de entrada.Em uma entrada digital segura com uma irregularidade detectada, esta deve primei-ro ser corrigida e o estado seguro estabelecido antes de a irregularidade de entradaser confirmada. Deste modo, após a confirmação de uma irregularidade de entrada,uma função do componente de segurança não é selecionada por engano.
Irregularidade doencoder
Se a placa de segurança detectar uma irregularidade no sistema de encoder, issoproduz uma mensagem de aviso sem função do componente de segurança ativada. Aplaca de segurança permanece operacional. Se pelo menos uma função do compo-nente de segurança estiver ativa, isso causa uma irregularidade do encoder. As fun-ções do componente de segurança mudam para o estado de irregularidade corres-pondente. O código de irregularidade do encoder ocorrida é transmitido.No caso de irregularidades no sistema de encoder que estão atribuídas à classe de ir-regularidade "Irregularidade do encoder" ou "Irregularidade do sistema", a resposta àirregularidade correspondente é iniciada assim que a irregularidade for detectada.A confirmação da irregularidade do encoder com a função do componente de segu-rança ativada leva a uma reinicialização da função do componente de segurança.
NOTAA confirmação de uma violação do valor máximo leva a um comportamento distintoda função do componente de segurança ativado do que a confirmação de uma irre-gularidade do encoder.
A resposta a uma irregularidade do encoder pode ser suprimida com a função "Modosilencioso Irregularidade do encoder" ou através do modo de emergência. A função"Modo silencioso Irregularidade do encoder" pode ser ativada em uma entrada digitalsegura ou através dos dados do processo seguros. Mais informações encontram-seno capítulo "Modo silencioso Irregularidade do encoder".
Irregularidade dosistema
No caso de uma irregularidade do sistema, todas as entradas e saídas digitais segu-ras são comutadas para o estado seguro. Além disso, a função do componente de se-gurança STO é executada sem desaceleração e as saídas F-DO0 e F-DO1 são desli-gadas. A placa de segurança é colocada no estado seguro.26
6313
26/P
T-BR
– 1
2/20
20
12 ServiceEstados de irregularidade da placa de segurança MOVISAFE® CS..A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)174
No protocolo FS, os bits das saídas digitais seguras F-DO0 e F-DO1 e as entradas F-DI00, F-DI01, F-DI02 e F-DI03 são definidos para "0" e os bits para a função do com-ponente de segurança STO e a irregularidade são definidos como "1".Além disso, o código de irregularidade do sistema correspondente ocorrida é transmi-tido.
NOTASe a saída digital segura é atribuída a uma função do componente de segurançaatravés da atribuição de funções, esta mesma função é selecionada no caso de umairregularidade do sistema.
Irregularidade críti-ca
No caso de uma irregularidade crítica, a placa de segurança é definida para o estadoseguro. Todas as entradas e saídas digitais seguras são comutadas para o estadoseguro. Além disso, a função do componente de segurança STO é executada semdesaceleração. A alimentação do sensor das entradas digitais seguras também é co-mutada para o estado desenergizado. Uma comunicação segura ativa é definida.Além disso, o código de irregularidade crítica correspondente ocorrida é transmitido.
Mensagens de ir-regularidade
Se houver uma irregularidade na placa de segurança, o conversor indicará que a pla-ca de segurança está reportando uma irregularidade.As medidas para a correção de irregularidades e outras informações sobre a causapodem ser encontradas no status da irregularidade da placa de segurança.
12.4.2 Comportamento de partida da placa de segurança
PERIGOA placa de segurança reinicia automaticamente depois de ocorrer uma irregularida-de após ligar a tensão de alimentação, após sair do modo de espera ou após a irre-gularidade de confirmação de algumas irregularidades do conversor.Morte ou ferimentos graves.• O parâmetro Status de irregularidade após inicialização deve ser parametrizado
para "Bloqueio de partida". Isso impede o reinício automático da placa de segu-rança nos casos mencionados.
Na área "Ajustes básicos" da ferramenta de parametrização "Assist CS..", o compor-tamento de partida da placa de segurança pode ser determinado através do parâme-tro Status da irregularidade após inicialização. As seguintes configurações de parâ-metros são possíveis.• Configuração de parâmetros "Bloqueio de partida"
A placa de segurança sempre inicia depois de ligar a tensão de alimentação comum bloqueio de partida. Essa parametrização é destinada para operação indepen-dente.
• Configuração de parâmetros "Sem bloqueio de partida"A placa de segurança é iniciada diretamente. Observar que as irregularidades sãoconfirmadas desligando e religando a tensão de alimentação ou saindo do modode espera. Isto significa que uma irregularidade pendente antes de desligar a ten-são de alimentação ou no modo de espera é confirmada e a placa de segurança éiniciada. Esta variante de parametrização destina-se à operação fieldbus em que,se necessário, o comando de nível superior deve assumir o bloqueio no caso deuma irregularidade. 26
6313
26/P
T-BR
– 1
2/20
20
12ServiceConfirmação
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 175
Enquanto o bloqueio de partida estiver ativado, a função do componente de seguran-ça STO é ativada. As saídas configuradas na função STO ou SBC são ativadas deacordo com a função do componente de segurança. Se as saídas estiverem configu-radas para "Dados F-PA", elas continuarão sendo controladas pelo controlador de se-gurança de nível superior. As saídas não são colocadas no estado seguroO bloqueio de partida é desativado se uma das seguintes condições tiver sido atendi-da:• Ocorreu uma confirmação de irregularidade• O modo silencioso está ativado
12.5 ConfirmaçãoUma irregularidade pode ser confirmada através de uma entrada digital segura F-DIou através do bit "Confirmação de irregularidade" dos dados do processo seguros.Para confirmar uma irregularidade por meio de uma entrada digital segura, uma entra-da deve estar parametrizada para "Confirmação de irregularidades" ou "Desbloqueiode F-DI bloqueado e confirmação".Para confirmar uma irregularidade por meio de PROFIsafe, FSoE ou ISOFAST®, atroca de dados segura da placa de segurança deve estar livre de irregularidades. Asirregularidades na placa de segurança podem então ser confirmadas por um flancoascendente por meio do bit "Confirmação de irregularidades" nos dados de saída deprocesso F.Uma irregularidade crítica somente pode ser confirmada desligando e ligando a ten-são de alimentação.
PERIGODependendo da conexão, o MOVISAFE® CS..A pode desativar a função do compo-nente de segurança STO após a irregularidade ter sido confirmada. Isso pode fazercom que o sistema seja reiniciado imediatamente.Morte ou ferimentos graves.• Certificar-se de que ninguém esteja na área de perigo do sistema enquanto a ir-
regularidade está sendo confirmada• Certificar-se de que a função do componente de segurança STO por meio de F-
DI ou que a comunicação segura esteja ativa durante a confirmação da irregula-ridade.
Ao realizar a parametrização, criação do relatório de aceitação e publicação da acei-tação, as violações dos valores máximos existentes das funções do componente desegurança são eliminadas. O bloqueio de partida é definido para que o sistema nãovolte a funcionar posteriormente.
12.5.1 Confirmação de uma irregularidade do sistemaSe as entradas digitais seguras com bloqueio ativo forem usadas para confirmar umairregularidade do sistema, proceder da seguinte forma:1. Eliminar a causa da irregularidade, se possível.2. Certificar-se de que:
• ninguém esteja na área de perigo do sistema.
2663
1326
/PT-
BR –
12/
2020
12 ServiceFunção "Modo de emergência"
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)176
• a função do componente de segurança STO esteja ativada por meio de F-DIou de comunicação segura.
12.5.2 Confirmação de uma irregularidade de entradaÉ possível que ocorra uma irregularidade na entrada se uma das seguintes funçõesna atribuição de funções for atribuída a uma entrada digital segura F-DI de 2 canais.• SBT clearance• Liberação de passo SLI• Desbloqueio F-DI• Desbloqueio F-DI e confirmação• Modo silencioso• Ativar modo de testeAntes de confirmar uma irregularidade na entrada, garantir que:• Ninguém esteja na área de perigo do sistema.• Não haja sinal de 24 VCC nas entradas correspondentes.
12.6 Função "Modo de emergência"A função "Modo de emergência" só pode ser acionada com o controle manual. A fun-ção "Modo de emergência" aciona automaticamente as funções "Modo silencioso Irre-gularidade do encoder" (consultar o capítulo "Modo silencioso Irregularidade do enco-der") e "Modo silencioso Dados de saída do processo (F-PA)" (consultar o capítulo"Modo silencioso Dados de saída do processo").
12.6.1 Indicações de segurança
PERIGOA função "Modo de emergência" pode levar a um reinício imediato do sistema.Morte ou ferimentos graves.• Antes de ativar a função "Modo de emergência", medidas organizacionais de-
vem ser tomadas pelo usuário para proteger as pessoas e a máquina.
PERIGOO controle manual está conectado à unidade incorreta. Isso pode fazer com que osistema seja reiniciado imediatamente.Morte ou ferimentos graves.• Antes de ativar a função "Modo de emergência", medidas organizacionais de-
vem ser tomadas pelo usuário para proteger as pessoas e a máquina.• O controle manual deve estar conectado mecanicamente à unidade correta.• Garantir que seja possível visualizar a tela do controle manual e o sistema a
qualquer momento durante o modo de emergência. A conexão entre o controlemanual e a unidade deve ser concebida de forma que possa ser desconectada aqualquer momento sem ferramentas.
2663
1326
/PT-
BR –
12/
2020

12ServiceDiagnóstico de irregularidades
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 177
12.6.2 Unidades aprovadasA função "Modo de emergência" é permitida para MOVIDRIVE® technology com placade segurança MOVISAFE® CS..A.
12.6.3 Pré-requisitos• A função "Modo de emergência" (índice 8707.2) deve estar ativada.• Para iniciar a função "Modo de emergência", deve haver uma irregularidade do
encoder ou um erro de comunicação no protocolo F.
12.6.4 Início do modo de emergênciaProceder da seguinte forma:• Selecionar a função "Modo de emergência" no controle manual.• Utilizar o LED "F-ERR" (consultar o capítulo "LED F-ERR") para verificar se a uni-
dade correta indica o modo de emergência. Se a unidade incorreta piscar, é ne-cessário cancelar imediatamente a ativação do modo de emergência.
• Quando a unidade correta tiver sido selecionada, o ID do modo de emergência éexibido. Confirmar a sinalização da unidade correta. Para tal, inserir o ID do modode emergência exibido na ordem inversa e clicar em OK.
12.6.5 Sair do modo de emergência• É possível sair de maneira relacionada à segurança do modo de emergência inter-
rompendo a conexão entre o controle manual e a unidade.• Não é possível sair do modo de emergência de modo relacionado à segurança
através da função "Sair do modo de emergência" oferecida pelo controle manual.
12.7 Diagnóstico de irregularidadesO status da irregularidade "Primeira irregularidade atual" indica a primeira irregulari-dade da placa de segurança com o código de irregularidade, o código da subirregula-ridade e a descrição da irregularidade correspondentes. Para fins internos, são exibi-dos códigos da irregularidade adicionais.A primeira irregularidade atual é a irregularidade que ocorre após uma reinicializaçãoou desde a última confirmação como a primeira irregularidade com mais alta priorida-de.
12.7.1 Mensagens de irregularidadeSe houver uma irregularidade na placa de segurança, esta irregularidade será indica-da pelo conversor da seguinte forma.
Subirregularidade: 46.50Descrição: Atenção
Resposta: Atenção com reset automático
Causa Ação
- A placa de segurança informa uma irregularida-de do subcomponente com a classe de irregulari-dade "Atenção".
Consultar status da irregularidade "Subcompo-nente da placa de segurança"26
6313
26/P
T-BR
– 1
2/20
20
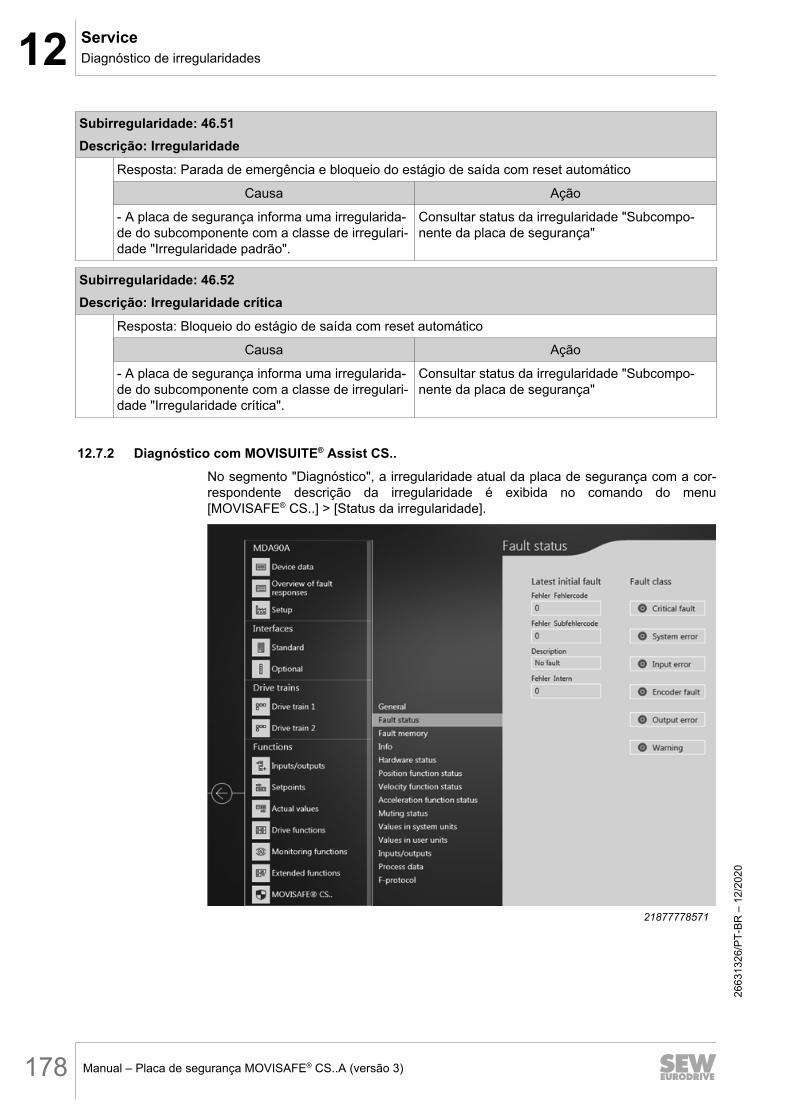
12 ServiceDiagnóstico de irregularidades
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)178
Subirregularidade: 46.51Descrição: Irregularidade
Resposta: Parada de emergência e bloqueio do estágio de saída com reset automático
Causa Ação
- A placa de segurança informa uma irregularida-de do subcomponente com a classe de irregulari-dade "Irregularidade padrão".
Consultar status da irregularidade "Subcompo-nente da placa de segurança"
Subirregularidade: 46.52Descrição: Irregularidade crítica
Resposta: Bloqueio do estágio de saída com reset automático
Causa Ação
- A placa de segurança informa uma irregularida-de do subcomponente com a classe de irregulari-dade "Irregularidade crítica".
Consultar status da irregularidade "Subcompo-nente da placa de segurança"
12.7.2 Diagnóstico com MOVISUITE® Assist CS..No segmento "Diagnóstico", a irregularidade atual da placa de segurança com a cor-respondente descrição da irregularidade é exibida no comando do menu[MOVISAFE® CS..] > [Status da irregularidade].
21877778571
2663
1326
/PT-
BR –
12/
2020
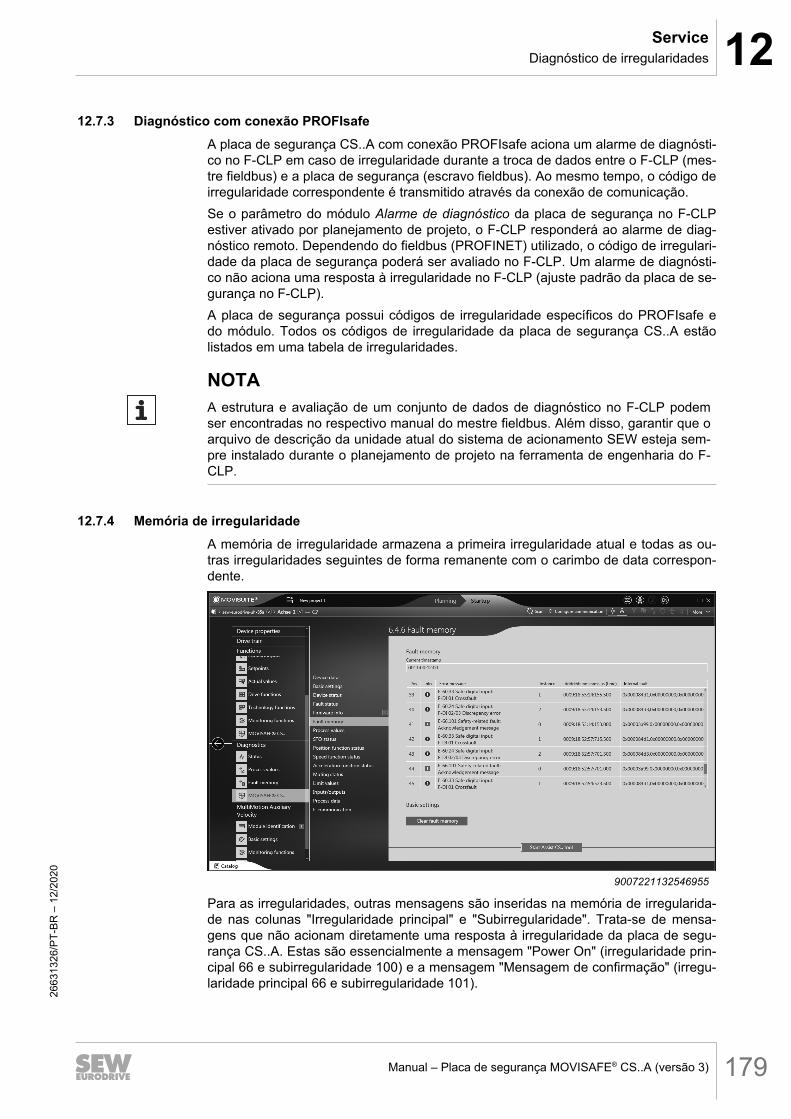
12ServiceDiagnóstico de irregularidades
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 179
12.7.3 Diagnóstico com conexão PROFIsafeA placa de segurança CS..A com conexão PROFIsafe aciona um alarme de diagnósti-co no F-CLP em caso de irregularidade durante a troca de dados entre o F-CLP (mes-tre fieldbus) e a placa de segurança (escravo fieldbus). Ao mesmo tempo, o código deirregularidade correspondente é transmitido através da conexão de comunicação.Se o parâmetro do módulo Alarme de diagnóstico da placa de segurança no F-CLPestiver ativado por planejamento de projeto, o F-CLP responderá ao alarme de diag-nóstico remoto. Dependendo do fieldbus (PROFINET) utilizado, o código de irregulari-dade da placa de segurança poderá ser avaliado no F-CLP. Um alarme de diagnósti-co não aciona uma resposta à irregularidade no F-CLP (ajuste padrão da placa de se-gurança no F-CLP).A placa de segurança possui códigos de irregularidade específicos do PROFIsafe edo módulo. Todos os códigos de irregularidade da placa de segurança CS..A estãolistados em uma tabela de irregularidades.
NOTAA estrutura e avaliação de um conjunto de dados de diagnóstico no F-CLP podemser encontradas no respectivo manual do mestre fieldbus. Além disso, garantir que oarquivo de descrição da unidade atual do sistema de acionamento SEW esteja sem-pre instalado durante o planejamento de projeto na ferramenta de engenharia do F-CLP.
12.7.4 Memória de irregularidadeA memória de irregularidade armazena a primeira irregularidade atual e todas as ou-tras irregularidades seguintes de forma remanente com o carimbo de data correspon-dente.
9007221132546955
Para as irregularidades, outras mensagens são inseridas na memória de irregularida-de nas colunas "Irregularidade principal" e "Subirregularidade". Trata-se de mensa-gens que não acionam diretamente uma resposta à irregularidade da placa de segu-rança CS..A. Estas são essencialmente a mensagem "Power On" (irregularidade prin-cipal 66 e subirregularidade 100) e a mensagem "Mensagem de confirmação" (irregu-laridade principal 66 e subirregularidade 101).
2663
1326
/PT-
BR –
12/
2020
12 ServiceTroca da unidade
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)180
A posição da irregularidade é exibida na coluna "Pos". A categoria da irregularidade éexibida através de um símbolo na coluna "Info". Na coluna "Mensagem de irregulari-dade" é indicado o número da irregularidade, o texto do irregularidade principal e otexto da subirregularidade. Na coluna "Tempo" é indicado o valor atual do contador dehoras de serviço da placa de segurança. A coluna "Irregularidade interna" é utilizadapara fins internos. A memória de irregularidade está organizada como buffer circular.Na linha 0 da lista se encontra sempre a última irregularidade ocorrida. Se houvermais de 50 entradas, a irregularidade mais antiga será substituída.
12.8 Troca da unidade
NOTA• Observar as informações no capítulo "Compatibilidade".• Uma placa de segurança CS..A com irregularidade deve ser colocado fora de
operação no período de 100 horas.
AVISOO armazenamento de chaves inserido incorretamente ativa uma parametrização in-correta da placa de segurança.Morte ou ferimentos graves.• Garantir que o armazenamento de chaves apropriado para a aplicação esteja na
posição correta do sistema.
A característica "unidade marcada como aceito" não é inválida nos seguintes casos:• O conversor com placa de segurança foi substituído• A placa de segurança foi substituída• Um sensor ou atuador conectado à placa de segurança foi substituídoEsses casos não podem ser detectados pela placa de segurança. Tanto o LED RUNquanto os dados do processo padrão continuam sinalizando o status "Módulo aceito".Nestes casos, é responsabilidade do usuário verificar até que ponto uma nova aceita-ção é necessária.
12.8.1 Substituição da unidade com MOVI-C® CONTROLLERPara a troca real da unidade, é necessário realizar os seguintes passos:O sistema oferece a opção de armazenar o conjunto de dados aplicativo do conversore o conjunto de dados da placa de segurança no controlador. Este passo deve ser re-alizado antecipadamente pelo usuário.1. Desligar a unidade a ser substituída.2. Retirar o armazenamento de chaves inseríveis da placa de segurança.3. Substituir a unidade (incluindo a placa de segurança MOVISAFE® CS..A) ou ape-
nas a placa de segurança MOVISAFE® CS..A.4. Reinserir o armazenamento de chaves removido no passo 2.5. Realizar um teste de funcionamento. O teste de todos os parâmetros é desneces-
sário.
2663
1326
/PT-
BR –
12/
2020

12ServiceTroca da unidade
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 181
O controlador reconhece a troca da unidade automaticamente e carrega o conjuntode dados aplicativo na placa de segurança MOVISAFE® CS..A. O conjunto de dadosda chave local no armazenamento de chaves inserível assegura que o conjunto dedados aplicativo correto tenha sido carregado. Em seguida, a placa de segurançaMOVISAFE® CS..A se encontrará no mesmo estado em que estava antes de a unida-de ser substituída. Isso significa que, se a placa de segurança MOVISAFE® CS..A es-tiver no estado "Aceito" antes de a unidade ser substituída, ela estará no estado"Aceito" depois que a unidade tiver sido substituída. Para garantir a conexão corretados sensores e atuadores, ainda é necessário realizar um teste de funcionamento daplaca de segurança, mesmo na função de troca automática da unidade.
NOTAApós substituir a placa de segurança, verificar a o referenciamento da placa de se-gurança.
12.8.2 Substituição da unidade com MOVI-C® sem PC no MOVIDRIVE® technologyO sistema MOVI-C® oferece a opção de armazenar o conjunto de dados aplicativo doconversor e o conjunto de dados da placa de segurança no módulo de energia doconversor.Para a troca real da unidade, é necessário realizar os seguintes passos:1. Desligar a unidade a ser substituída.2. Retirar o módulo de energia inserido da unidade.3. Retirar o armazenamento de chaves inseríveis da placa de segurança CS..A.4. Substituir a unidade (incluindo a placa de segurança MOVISAFE® CS..A).5. Reinserir o módulo de energia removido na etapa 2 na unidade substituída.6. Reinserir o armazenamento de chaves removido na etapa 3 na placa de seguran-
ça substituída.7. Realizar um teste de funcionamento. O teste de todos os parâmetros é desneces-
sário.O conversor reconhece a troca da unidade automaticamente e carrega o conjunto dedados aplicativo na placa de segurança MOVISAFE® CS..A. O conjunto de dados dachave local no armazenamento de chaves inserível assegura que o conjunto de da-dos aplicativo correto tenha sido carregado. Em seguida, a placa de segurançaMOVISAFE® CS..A se encontrará no mesmo estado em que estava antes de a unida-de ser substituída. Isso significa que, se a placa de segurança MOVISAFE® CS..A es-tiver no estado "Aceito" antes de a unidade ser substituída, ela estará no estado"Aceito" depois que a unidade tiver sido substituída. Para garantir a conexão corretados sensores e atuadores, é necessário realizar um teste de funcionamento da placade segurança na função de troca automática da unidade.
NOTAApós substituir uma placa de segurança MOVISAFE® CSA31A, verificar o referencia-mento do CSA31A.
12.8.3 Troca da unidade com MOVISUITE®
Para trocar a unidade por MOVISUITE® proceder da seguinte forma:1. Proteger o conjunto de dados da unidade a ser trocada com o item do menu [Uni-
dade] > [PC].
2663
1326
/PT-
BR –
12/
2020

12 ServiceTroca da unidade
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)182
2. Desligar a unidade a ser substituída.3. Retirar o armazenamento de chaves inseríveis da placa de segurança.4. Substituir a unidade (incluindo a placa de segurança MOVISAFE® CS..A) ou ape-
nas a placa de segurança MOVISAFE® CS..A.5. Reinserir o armazenamento de chaves removido na etapa 3 na placa de seguran-
ça substituída.6. Voltar a ligar apenas a tensão de controle de 24 VCC.7. Carregar o conjunto de dados da unidade salvo no passo 1 de volta à nova unida-
de com o item do menu [PC] > [Unidade].8. Ligar a fonte de alimentação principal (230 VCA) novamente e realizar um teste
de funcionamento do sistema.
NOTAApós substituir uma placa de segurança MOVISAFE® CSA31A, verificar o referencia-mento do CSA31A.
12.8.4 Substituir armazenamento de chavesUm armazenamento de chaves com defeito de uma placa de segurança pode sersubstituído por um novo armazenamento de chaves.Para substituir um armazenamento de chaves, proceder da seguinte forma:1. Ter o relatório de aceitação original preparado ou documentar as somas de verifi-
cação atuais.2. Ligar a unidade.3. Substituir o armazenamento de chaves com defeito.4. Religar a unidade.5. Abrir a ferramenta de parametrização "Assist CS.." no MOVISUITE®.6. Carregar os parâmetros na placa de segurança.7. Elaborar um relatório.8. Comparar as somas de verificação anteriores com as somas de verificação atuais.
Nenhuma soma de verificação pode ter sido alterada. Se as somas de verificaçãoforem diferentes, verificar as funções relevantes novamente.
9. Publicar a aceitação com sucesso.
NOTADepois de substituir a memória de chaves da placa de segurança MOVISAFE®, é ne-cessário realizar novamente o referenciamento do CSA31A.
2663
1326
/PT-
BR –
12/
2020
13Dados técnicosNormas básicas testadas
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 183
13 Dados técnicos
13.1 Normas básicas testadas
A avaliação de segurança se baseia nas seguintes normas e classes de segurança:
Normas básicas testadasClasse de segurança/normas básicas testa-das
• Nível de desempenho (PL) de acordo comEN ISO 13849-1
• Nível de Integridade de Segurança (SIL) conformeIEC 61800-5-2
Observar as revisões das respectivas normas sobre a declaração de conformidade ouo certificado TÜV.
13.2 Dados técnicos gerais
ValorTemperatura ambiente ao armazenar a placa desegurança
≥ -25 °C – ≤ 85 °C
Temperatura ambiente MOVIDRIVE® system/te-chnology, todos os tamanhos(redução de potência, ver instruções de operação"MOVIDRIVE® system","MOVIDRIVE® technology")
• com MOVISAFE® CS..A:0 °C – 40 °C sem redução depotência
• com MOVISAFE® CSB..A,CSS..A:40 °C – 55 °C com reduçãode potência
• com MOVISAFE® CSA31A:40 °C – 50 °C com reduçãode potência
Temperatura ambiente MOVIDRIVE® modular, to-dos os tamanhos
0 °C – 45 °C sem redução de po-tência
Altitude de instalação Máximo 3800 m acima do níveldo mar
13.3 Dados elétricos geraisA placa de segurança é alimentada com tensão pela unidade básica.A tensão de alimentação conectada externamente ao módulo de alimentação ou aoconversor deve ser 24 VCC (-10%, + 20%) e ter uma classificação de carga de picode corrente de 12 A para um máximo de 45 µs. Além disso, a fonte de tensão deveatender aos regulamentos de acordo com SELV/PELV.
2663
1326
/PT-
BR –
12/
2020

13 Dados técnicosInterface do encoder X17 das placas de segurança CSS31A e CSB31A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)184
13.3.1 Consumo de potência e corrente das placas de segurança
Placa de segu-rança
Consumo de corrente máxi-mo
Consumo de potência máximo
CSB21A 0.74 A 17.7 W
CSS21A 1.1 A 26.4 W
CSB31A 1.6 A 38.4 W
CSS31A 1.6 A 38.4 W
CSA31A 1.6 A 38.4 W
13.4 Interface do encoder X17 das placas de segurança CSS31A e CSB31A
NOTAA interface do encoder X17 não é usada para funcionamento seguro nas placas desegurança CSS31A e CSB31A. A interface de múltiplo encoder X17 está descrita nomanual "MOVIDRIVE® modular/system/technology - Placa de múltiplo encoderCES11A".
13.4.1 Dados técnicos dos encoders de segurança permitidos
Denominação Valor/descriçãoCaracterísticas Interface de encoder para sinais do encoder HTL A, A,
B, B, sinais do encoder sin/cos
Encoders de segurançapermitidos
EI7C FS, AK0H, AK1H, E.7S, A.7W, EK8S, AK8W
Nível de sinal 0 V – +3 V Sinal do encoder LOW (Lógica "0")Sinal do encoder HIGH (Lógica "1")
Velocidade de operaçãomáxima EI7C FS, E.7S,EK8W, A.7W, AK8W
3600 min-1
Velocidade de operaçãomáxima AK0H, AK1H
6000 min-1
Frequência de entradamáxima permitida
1520 Hz
Tempo de resposta da de-tecção de rotação
Fórmula de cálculo:Tempo de resposta da detecção de rotaçãoem ms = 13 + 7500/n[n] = min−1
Tempo de resposta à irre-gularidade Detecção de ro-tação1)
Não superior ao tempo de resposta em caso livre de ir-regularidades.
1) O tempo de resposta à irregularidade é a duração total desde a ocorrência de uma irregularidade internaou externa detectável durante a comutação do encoder até a transição para o estado seguro através daplaca de segurança. 26
6313
26/P
T-BR
– 1
2/20
20
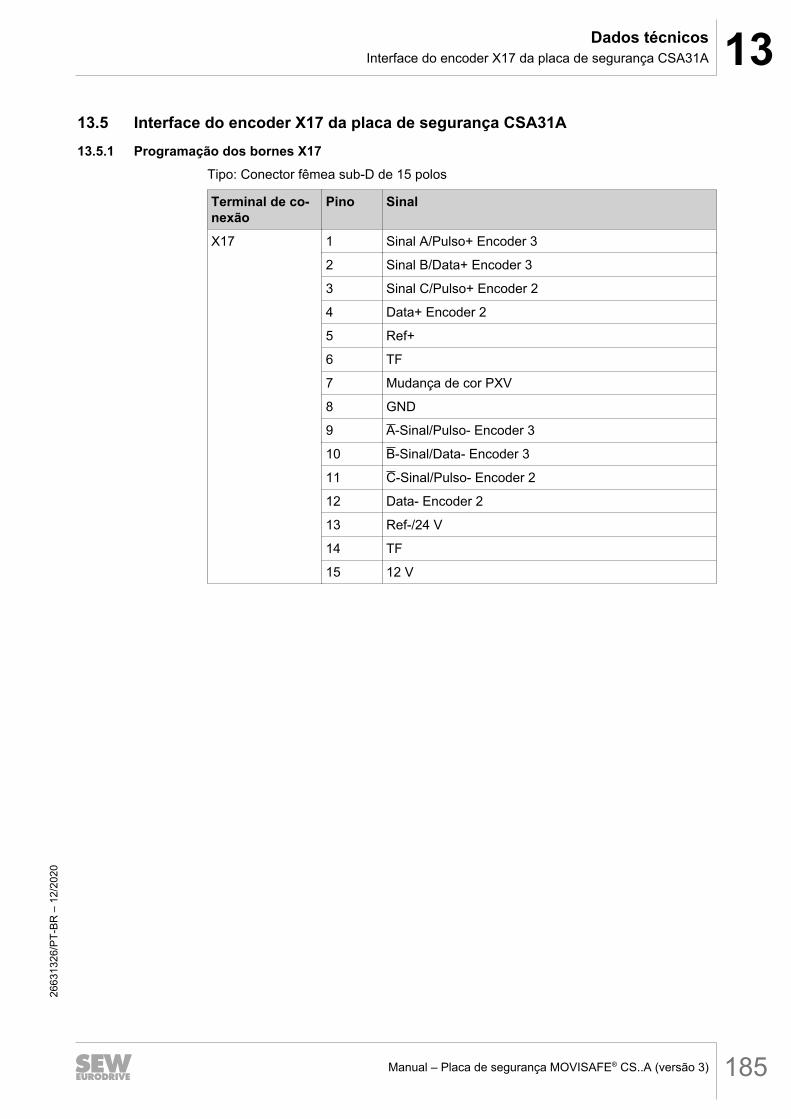
13Dados técnicosInterface do encoder X17 da placa de segurança CSA31A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 185
13.5 Interface do encoder X17 da placa de segurança CSA31A13.5.1 Programação dos bornes X17
Tipo: Conector fêmea sub-D de 15 polos
Terminal de co-nexão
Pino Sinal
X17 1 Sinal A/Pulso+ Encoder 3
2 Sinal B/Data+ Encoder 3
3 Sinal C/Pulso+ Encoder 2
4 Data+ Encoder 2
5 Ref+
6 TF
7 Mudança de cor PXV
8 GND
9 A-Sinal/Pulso- Encoder 3
10 B-Sinal/Data- Encoder 3
11 C-Sinal/Pulso- Encoder 2
12 Data- Encoder 2
13 Ref-/24 V
14 TF
15 12 V
2663
1326
/PT-
BR –
12/
2020
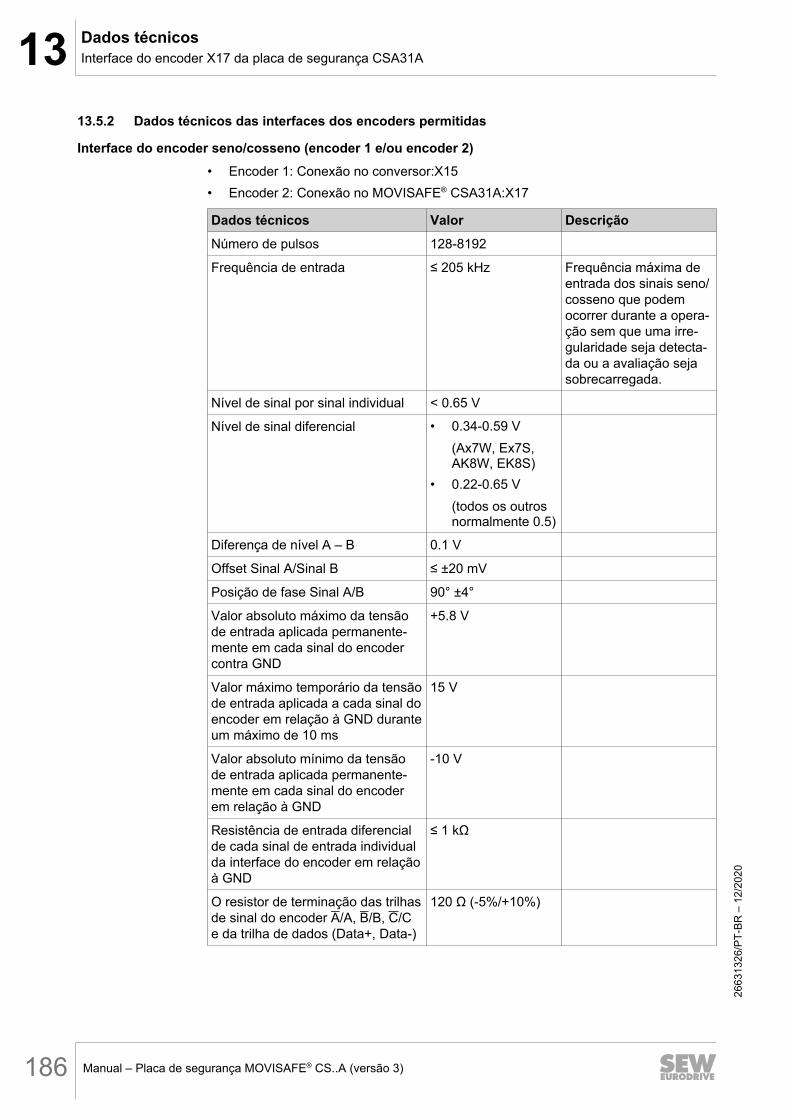
13 Dados técnicosInterface do encoder X17 da placa de segurança CSA31A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)186
13.5.2 Dados técnicos das interfaces dos encoders permitidas
Interface do encoder seno/cosseno (encoder 1 e/ou encoder 2)• Encoder 1: Conexão no conversor:X15• Encoder 2: Conexão no MOVISAFE® CSA31A:X17
Dados técnicos Valor DescriçãoNúmero de pulsos 128-8192
Frequência de entrada ≤ 205 kHz Frequência máxima deentrada dos sinais seno/cosseno que podemocorrer durante a opera-ção sem que uma irre-gularidade seja detecta-da ou a avaliação sejasobrecarregada.
Nível de sinal por sinal individual < 0.65 V
Nível de sinal diferencial • 0.34-0.59 V(Ax7W, Ex7S,AK8W, EK8S)
• 0.22-0.65 V(todos os outrosnormalmente 0.5)
Diferença de nível A – B 0.1 V
Offset Sinal A/Sinal B ≤ ±20 mV
Posição de fase Sinal A/B 90° ±4°
Valor absoluto máximo da tensãode entrada aplicada permanente-mente em cada sinal do encodercontra GND
+5.8 V
Valor máximo temporário da tensãode entrada aplicada a cada sinal doencoder em relação à GND duranteum máximo de 10 ms
15 V
Valor absoluto mínimo da tensãode entrada aplicada permanente-mente em cada sinal do encoderem relação à GND
-10 V
Resistência de entrada diferencialde cada sinal de entrada individualda interface do encoder em relaçãoà GND
≤ 1 kΩ
O resistor de terminação das trilhasde sinal do encoder A/A, B/B, C/Ce da trilha de dados (Data+, Data-)
120 Ω (-5%/+10%)
2663
1326
/PT-
BR –
12/
2020
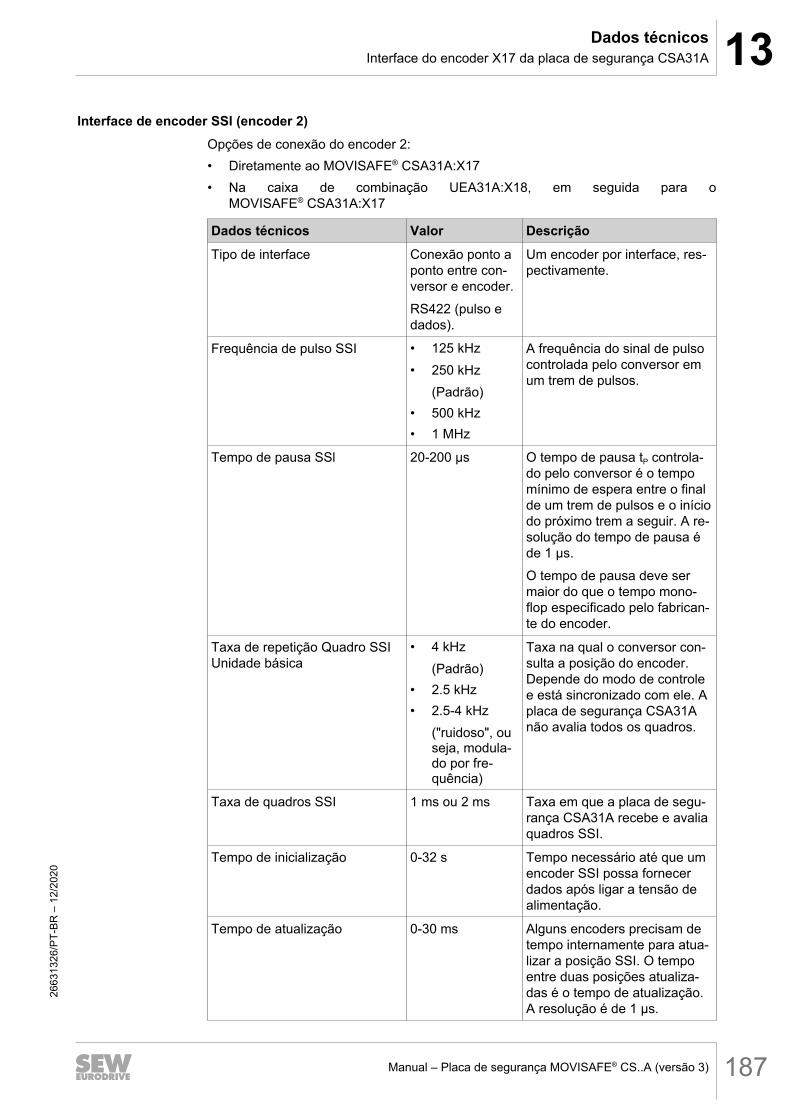
13Dados técnicosInterface do encoder X17 da placa de segurança CSA31A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 187
Interface de encoder SSI (encoder 2)Opções de conexão do encoder 2:• Diretamente ao MOVISAFE® CSA31A:X17• Na caixa de combinação UEA31A:X18, em seguida para o
MOVISAFE® CSA31A:X17
Dados técnicos Valor DescriçãoTipo de interface Conexão ponto a
ponto entre con-versor e encoder.RS422 (pulso edados).
Um encoder por interface, res-pectivamente.
Frequência de pulso SSI • 125 kHz• 250 kHz
(Padrão)• 500 kHz• 1 MHz
A frequência do sinal de pulsocontrolada pelo conversor emum trem de pulsos.
Tempo de pausa SSl 20-200 µs O tempo de pausa tP controla-do pelo conversor é o tempomínimo de espera entre o finalde um trem de pulsos e o iníciodo próximo trem a seguir. A re-solução do tempo de pausa éde 1 µs.O tempo de pausa deve sermaior do que o tempo mono-flop especificado pelo fabrican-te do encoder.
Taxa de repetição Quadro SSIUnidade básica
• 4 kHz(Padrão)
• 2.5 kHz• 2.5-4 kHz
("ruidoso", ouseja, modula-do por fre-quência)
Taxa na qual o conversor con-sulta a posição do encoder.Depende do modo de controlee está sincronizado com ele. Aplaca de segurança CSA31Anão avalia todos os quadros.
Taxa de quadros SSI 1 ms ou 2 ms Taxa em que a placa de segu-rança CSA31A recebe e avaliaquadros SSI.
Tempo de inicialização 0-32 s Tempo necessário até que umencoder SSI possa fornecerdados após ligar a tensão dealimentação.
Tempo de atualização 0-30 ms Alguns encoders precisam detempo internamente para atua-lizar a posição SSI. O tempoentre duas posições atualiza-das é o tempo de atualização.A resolução é de 1 µs.
2663
1326
/PT-
BR –
12/
2020
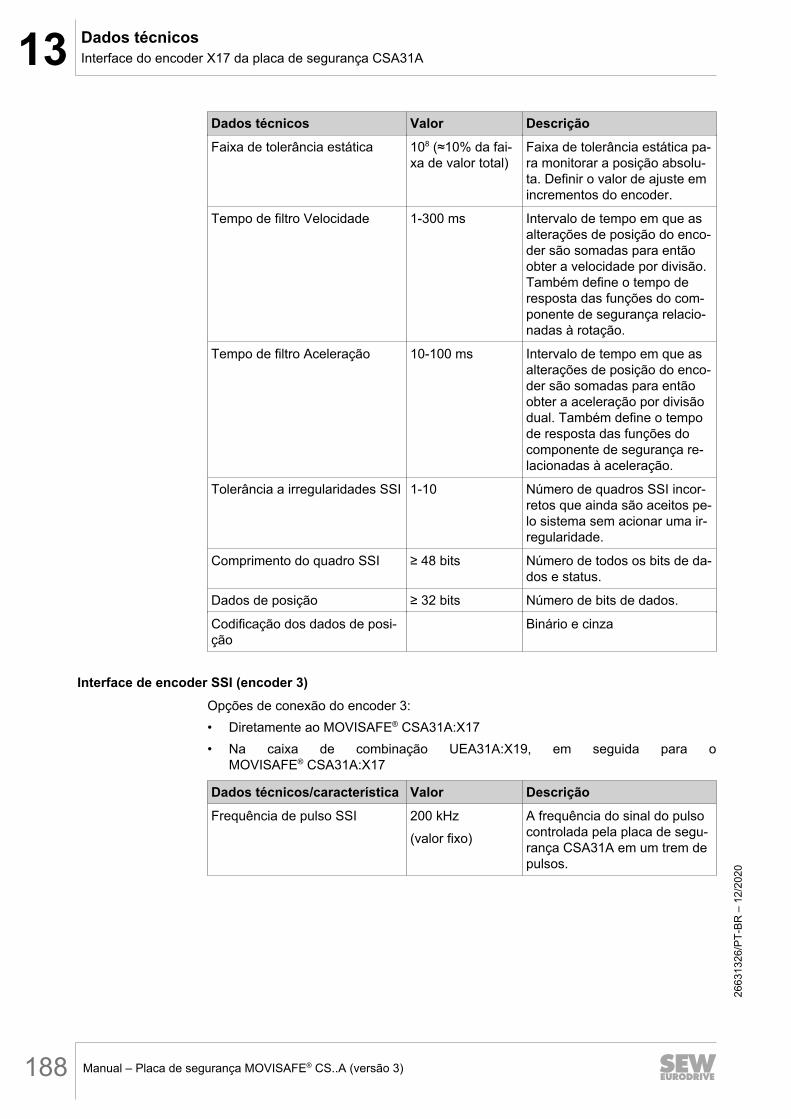
13 Dados técnicosInterface do encoder X17 da placa de segurança CSA31A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)188
Dados técnicos Valor DescriçãoFaixa de tolerância estática 108 (≈10% da fai-
xa de valor total)Faixa de tolerância estática pa-ra monitorar a posição absolu-ta. Definir o valor de ajuste emincrementos do encoder.
Tempo de filtro Velocidade 1-300 ms Intervalo de tempo em que asalterações de posição do enco-der são somadas para entãoobter a velocidade por divisão.Também define o tempo deresposta das funções do com-ponente de segurança relacio-nadas à rotação.
Tempo de filtro Aceleração 10-100 ms Intervalo de tempo em que asalterações de posição do enco-der são somadas para entãoobter a aceleração por divisãodual. Também define o tempode resposta das funções docomponente de segurança re-lacionadas à aceleração.
Tolerância a irregularidades SSI 1-10 Número de quadros SSI incor-retos que ainda são aceitos pe-lo sistema sem acionar uma ir-regularidade.
Comprimento do quadro SSI ≥ 48 bits Número de todos os bits de da-dos e status.
Dados de posição ≥ 32 bits Número de bits de dados.
Codificação dos dados de posi-ção
Binário e cinza
Interface de encoder SSI (encoder 3)Opções de conexão do encoder 3:• Diretamente ao MOVISAFE® CSA31A:X17• Na caixa de combinação UEA31A:X19, em seguida para o
MOVISAFE® CSA31A:X17
Dados técnicos/característica Valor DescriçãoFrequência de pulso SSI 200 kHz
(valor fixo)A frequência do sinal do pulsocontrolada pela placa de segu-rança CSA31A em um trem depulsos.
2663
1326
/PT-
BR –
12/
2020
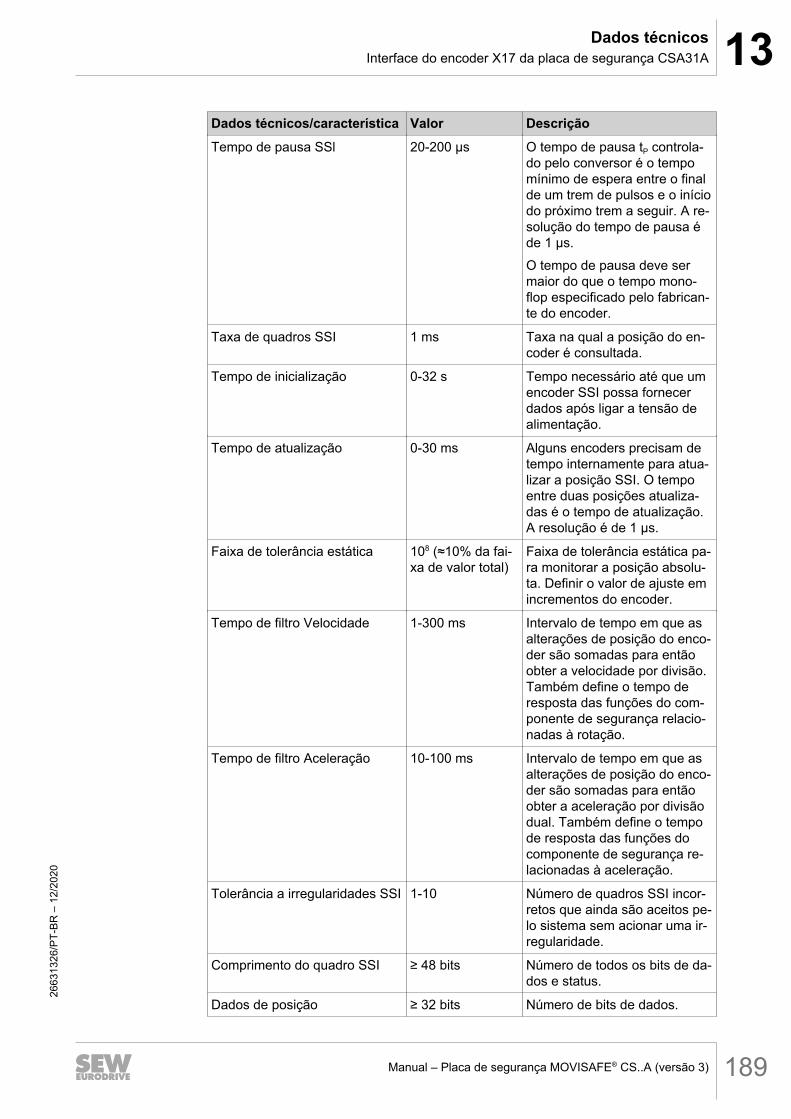
13Dados técnicosInterface do encoder X17 da placa de segurança CSA31A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 189
Dados técnicos/característica Valor DescriçãoTempo de pausa SSl 20-200 µs O tempo de pausa tP controla-
do pelo conversor é o tempomínimo de espera entre o finalde um trem de pulsos e o iníciodo próximo trem a seguir. A re-solução do tempo de pausa éde 1 µs.O tempo de pausa deve sermaior do que o tempo mono-flop especificado pelo fabrican-te do encoder.
Taxa de quadros SSI 1 ms Taxa na qual a posição do en-coder é consultada.
Tempo de inicialização 0-32 s Tempo necessário até que umencoder SSI possa fornecerdados após ligar a tensão dealimentação.
Tempo de atualização 0-30 ms Alguns encoders precisam detempo internamente para atua-lizar a posição SSI. O tempoentre duas posições atualiza-das é o tempo de atualização.A resolução é de 1 µs.
Faixa de tolerância estática 108 (≈10% da fai-xa de valor total)
Faixa de tolerância estática pa-ra monitorar a posição absolu-ta. Definir o valor de ajuste emincrementos do encoder.
Tempo de filtro Velocidade 1-300 ms Intervalo de tempo em que asalterações de posição do enco-der são somadas para entãoobter a velocidade por divisão.Também define o tempo deresposta das funções do com-ponente de segurança relacio-nadas à rotação.
Tempo de filtro Aceleração 10-100 ms Intervalo de tempo em que asalterações de posição do enco-der são somadas para entãoobter a aceleração por divisãodual. Também define o tempode resposta das funções docomponente de segurança re-lacionadas à aceleração.
Tolerância a irregularidades SSI 1-10 Número de quadros SSI incor-retos que ainda são aceitos pe-lo sistema sem acionar uma ir-regularidade.
Comprimento do quadro SSI ≥ 48 bits Número de todos os bits de da-dos e status.
Dados de posição ≥ 32 bits Número de bits de dados.
2663
1326
/PT-
BR –
12/
2020

13 Dados técnicosInterface do encoder X17 da placa de segurança CSA31A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)190
Dados técnicos/característica Valor DescriçãoCodificação dos dados de posi-ção
Código digital ecódigo cinza
2663
1326
/PT-
BR –
12/
2020
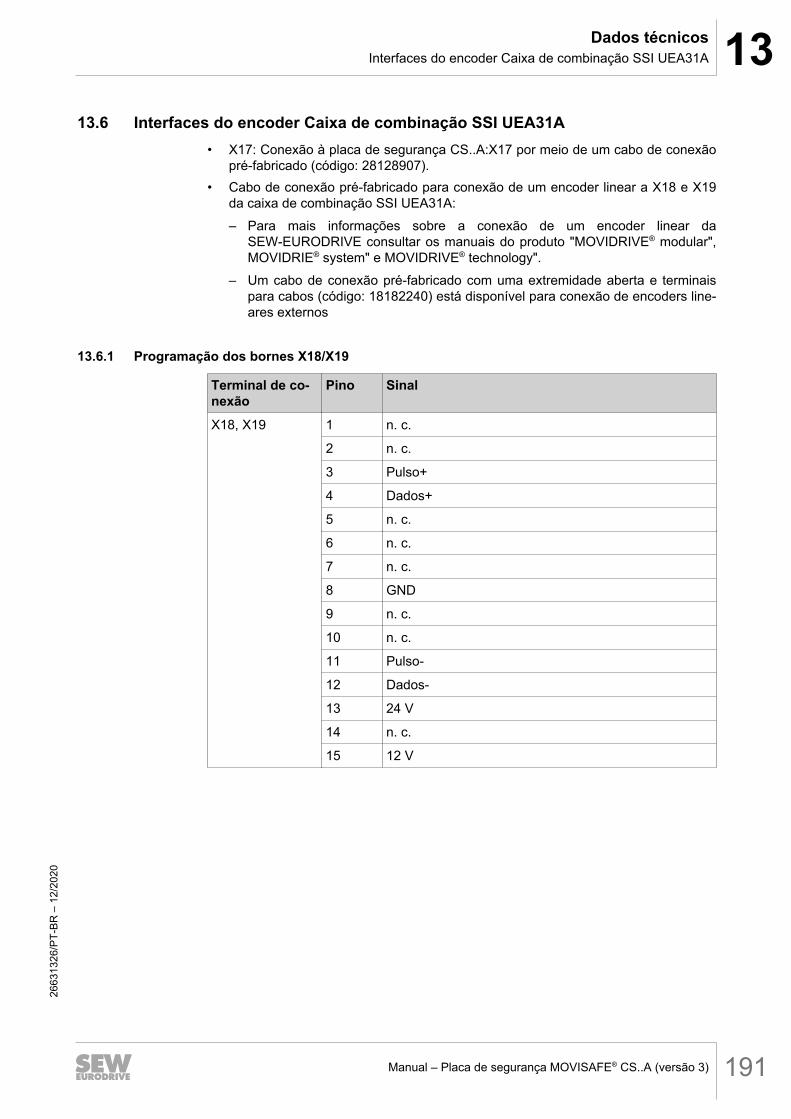
13Dados técnicosInterfaces do encoder Caixa de combinação SSI UEA31A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 191
13.6 Interfaces do encoder Caixa de combinação SSI UEA31A• X17: Conexão à placa de segurança CS..A:X17 por meio de um cabo de conexão
pré-fabricado (código: 28128907).• Cabo de conexão pré-fabricado para conexão de um encoder linear a X18 e X19
da caixa de combinação SSI UEA31A:– Para mais informações sobre a conexão de um encoder linear da
SEW‑EURODRIVE consultar os manuais do produto "MOVIDRIVE® modular",MOVIDRIE® system" e MOVIDRIVE® technology".
– Um cabo de conexão pré-fabricado com uma extremidade aberta e terminaispara cabos (código: 18182240) está disponível para conexão de encoders line-ares externos
13.6.1 Programação dos bornes X18/X19
Terminal de co-nexão
Pino Sinal
X18, X19 1 n. c.
2 n. c.
3 Pulso+
4 Dados+
5 n. c.
6 n. c.
7 n. c.
8 GND
9 n. c.
10 n. c.
11 Pulso-
12 Dados-
13 24 V
14 n. c.
15 12 V
2663
1326
/PT-
BR –
12/
2020
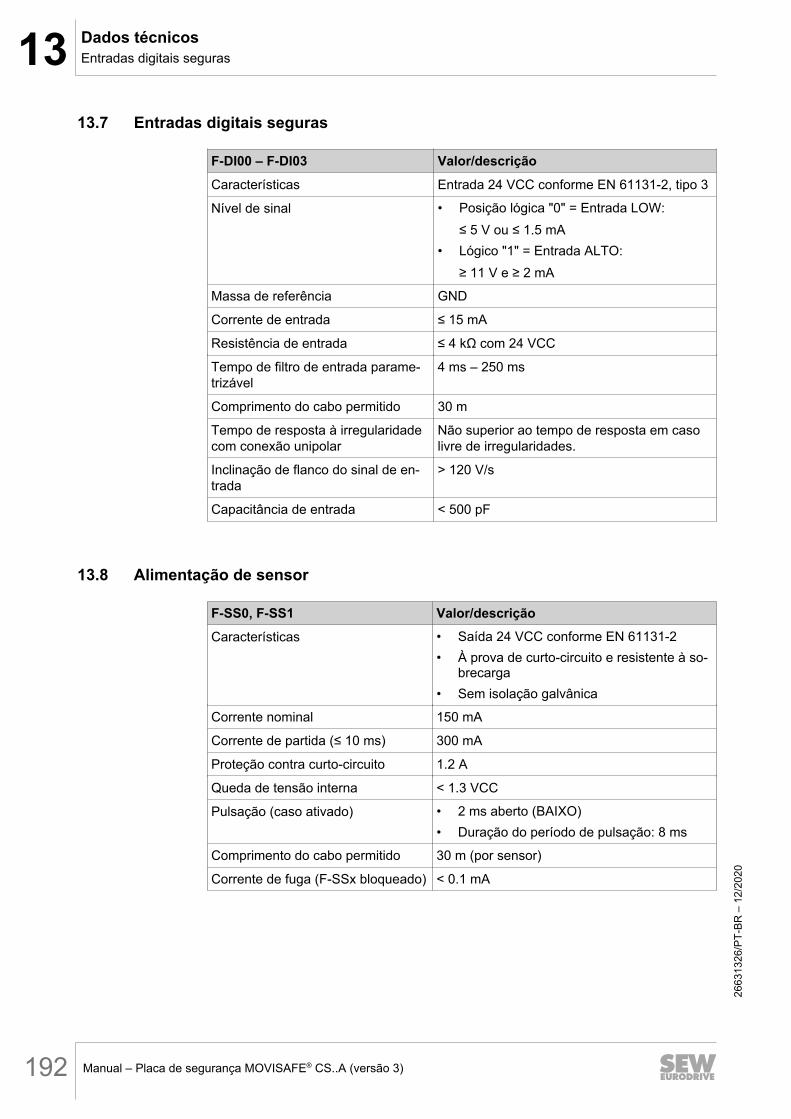
13 Dados técnicosEntradas digitais seguras
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)192
13.7 Entradas digitais seguras
F-DI00 – F-DI03 Valor/descriçãoCaracterísticas Entrada 24 VCC conforme EN 61131-2, tipo 3
Nível de sinal • Posição lógica "0" = Entrada LOW:≤ 5 V ou ≤ 1.5 mA
• Lógico "1" = Entrada ALTO:≥ 11 V e ≥ 2 mA
Massa de referência GND
Corrente de entrada ≤ 15 mA
Resistência de entrada ≤ 4 kΩ com 24 VCC
Tempo de filtro de entrada parame-trizável
4 ms – 250 ms
Comprimento do cabo permitido 30 m
Tempo de resposta à irregularidadecom conexão unipolar
Não superior ao tempo de resposta em casolivre de irregularidades.
Inclinação de flanco do sinal de en-trada
> 120 V/s
Capacitância de entrada < 500 pF
13.8 Alimentação de sensor
F-SS0, F-SS1 Valor/descriçãoCaracterísticas • Saída 24 VCC conforme EN 61131-2
• À prova de curto-circuito e resistente à so-brecarga
• Sem isolação galvânica
Corrente nominal 150 mA
Corrente de partida (≤ 10 ms) 300 mA
Proteção contra curto-circuito 1.2 A
Queda de tensão interna < 1.3 VCC
Pulsação (caso ativado) • 2 ms aberto (BAIXO)• Duração do período de pulsação: 8 ms
Comprimento do cabo permitido 30 m (por sensor)
Corrente de fuga (F-SSx bloqueado) < 0.1 mA
2663
1326
/PT-
BR –
12/
2020

13Dados técnicosSaídas digitais seguras
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 193
13.9 Saídas digitais seguras
F-DO00_P/M, F-DO01_P/M Valor/descriçãoCaracterísticas • Saída 24 VCC conforme EN 61131-2
• À prova de curto-circuito e resistente à so-brecarga
Corrente nominal 150 mA
Corrente de partida (≤ 10 ms) 300 mA
Corrente de fuga (F-DOx bloquea-do)
< 0.1 mA
Frequência de chaveamento máxi-ma
• 10 Hz em operação < 1 minuto• 0.5 Hz em operação > 1 minuto
Proteção contra sobrecarga 210 mA
Corrente mínima para monitoraçãode ruptura de fio
15 mA
Comprimento do cabo permitido 30 m
Capacidade de carga (duraçãomáxima do pulso de teste)
≤ 300 nF
Capacidade de carga (duração dopulso de teste de 1 ms)
50 nF
Capacitância em relação a GND/PE(somente comutação PM)
≤ 10 nF
Capacidade de carga com desaco-plamento por diodo
≤ 12 µF
Indutância de carga ≤ 100 µH
Indutância de carga com rodas li-vres
≤ 40 H
Resistência de carga mínima > 130 Ω
2663
1326
/PT-
BR –
12/
2020
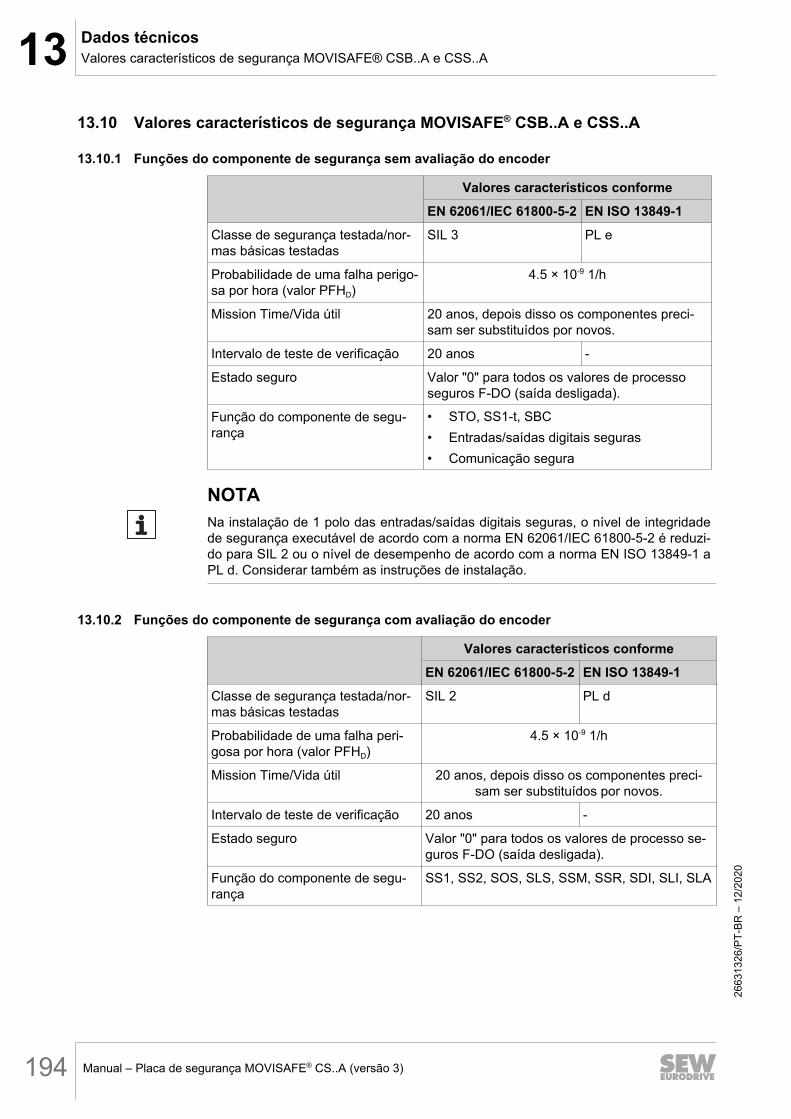
13 Dados técnicosValores característicos de segurança MOVISAFE® CSB..A e CSS..A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)194
13.10 Valores característicos de segurança MOVISAFE® CSB..A e CSS..AValorescaracterísticos desegurançaMOVISAFE® CSB..A eCSS..A
13.10.1 Funções do componente de segurança sem avaliação do encoder
Valores característicos conformeEN 62061/IEC 61800-5-2 EN ISO 13849-1
Classe de segurança testada/nor-mas básicas testadas
SIL 3 PL e
Probabilidade de uma falha perigo-sa por hora (valor PFHD)
4.5 × 10-9 1/h
Mission Time/Vida útil 20 anos, depois disso os componentes preci-sam ser substituídos por novos.
Intervalo de teste de verificação 20 anos -
Estado seguro Valor "0" para todos os valores de processoseguros F-DO (saída desligada).
Função do componente de segu-rança
• STO, SS1-t, SBC• Entradas/saídas digitais seguras• Comunicação segura
NOTANa instalação de 1 polo das entradas/saídas digitais seguras, o nível de integridadede segurança executável de acordo com a norma EN 62061/IEC 61800-5-2 é reduzi-do para SIL 2 ou o nível de desempenho de acordo com a norma EN ISO 13849-1 aPL d. Considerar também as instruções de instalação.
13.10.2 Funções do componente de segurança com avaliação do encoder
Valores característicos conformeEN 62061/IEC 61800-5-2 EN ISO 13849-1
Classe de segurança testada/nor-mas básicas testadas
SIL 2 PL d
Probabilidade de uma falha peri-gosa por hora (valor PFHD)
4.5 × 10-9 1/h
Mission Time/Vida útil 20 anos, depois disso os componentes preci-sam ser substituídos por novos.
Intervalo de teste de verificação 20 anos -
Estado seguro Valor "0" para todos os valores de processo se-guros F-DO (saída desligada).
Função do componente de segu-rança
SS1, SS2, SOS, SLS, SSM, SSR, SDI, SLI, SLA
2663
1326
/PT-
BR –
12/
2020
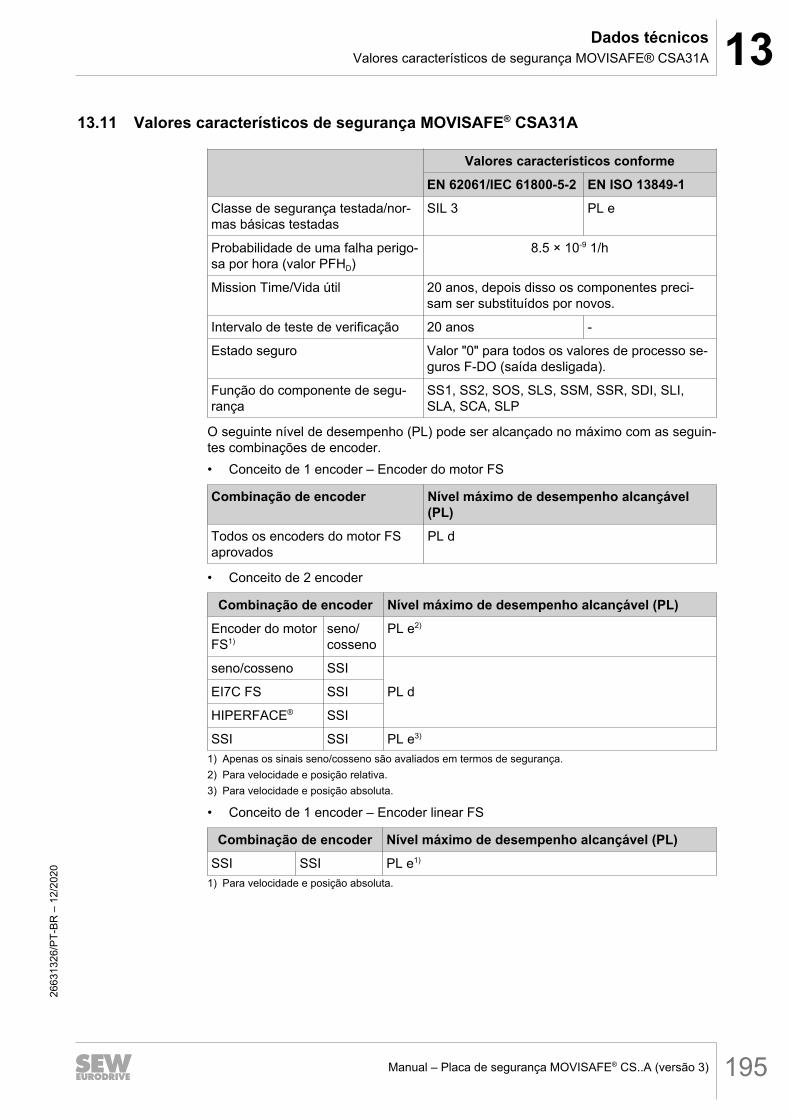
13Dados técnicosValores característicos de segurança MOVISAFE® CSA31A
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 195
13.11 Valores característicos de segurança MOVISAFE® CSA31AValorescaracterísticos desegurançaMOVISAFE® CSA31A
Valores característicos conformeEN 62061/IEC 61800-5-2 EN ISO 13849-1
Classe de segurança testada/nor-mas básicas testadas
SIL 3 PL e
Probabilidade de uma falha perigo-sa por hora (valor PFHD)
8.5 × 10-9 1/h
Mission Time/Vida útil 20 anos, depois disso os componentes preci-sam ser substituídos por novos.
Intervalo de teste de verificação 20 anos -
Estado seguro Valor "0" para todos os valores de processo se-guros F-DO (saída desligada).
Função do componente de segu-rança
SS1, SS2, SOS, SLS, SSM, SSR, SDI, SLI,SLA, SCA, SLP
O seguinte nível de desempenho (PL) pode ser alcançado no máximo com as seguin-tes combinações de encoder.• Conceito de 1 encoder – Encoder do motor FS
Combinação de encoder Nível máximo de desempenho alcançável(PL)
Todos os encoders do motor FSaprovados
PL d
• Conceito de 2 encoder
Combinação de encoder Nível máximo de desempenho alcançável (PL)Encoder do motorFS1)
seno/cosseno
PL e2)
seno/cosseno SSI
PL dEI7C FS SSI
HIPERFACE® SSI
SSI SSI PL e3)
1) Apenas os sinais seno/cosseno são avaliados em termos de segurança.2) Para velocidade e posição relativa.3) Para velocidade e posição absoluta.
• Conceito de 1 encoder – Encoder linear FS
Combinação de encoder Nível máximo de desempenho alcançável (PL)SSI SSI PL e1)
1) Para velocidade e posição absoluta.
2663
1326
/PT-
BR –
12/
2020
Índice remissivo
Índice remissivoA
Aceitação relacionada com a tecnologia de segu-rançaElaborar relatório de aceitação .................... 123Estrutura do relatório de aceitação .............. 123Procedimento ............................................... 122Publicar aceitação ........................................ 124
Acesso da periferia F da placa de segurança noTIA-PortalBloco de dados da periferia F da placa de segu-rança ............................................................ 129
AdvertênciasEstrutura das ................................................. 10Estrutura das advertências relacionadas ......... 9Identificação na documentação........................ 9Significado dos símbolos de perigo................ 10
Advertências específicas da seção ....................... 9Advertências integradas...................................... 10Alteração/Tratamento de alterações na unidade
..................................................................... 169Assist CS..
Conceito de segurança .................................. 31
C
Cálculo dos tempos de respostaComunicação segura ................................... 163Desmarcação de uma função do componentede segurança por meio de comunicação segura..................................................................... 168Desmarcação de uma função do componentede segurança por meio de uma entrada digitalsegura .......................................................... 168Encoder ........................................................ 161Entrada digital segura F-DI .......................... 163Seleção de uma função do componente de se-gurança por meio de uma entrada digital segura..................................................................... 164Tempo de resposta em caso de violação do va-lor máximo com resposta à irregularidade ... 166Tempo de resposta na violação do valor máxi-mo com comunicação segura ...................... 167Tempos de resposta atribuídos de modo fixo..................................................................... 160
Características do encoder integrado EI7C FS... 84Classes de irregularidade
Atenção ........................................................ 172
Irregularidade crítica..................................... 174Irregularidade da entrada ............................. 173Irregularidade da saída ................................ 173Irregularidade do encoder ............................ 173Irregularidade do sistema............................. 173Mensagem.................................................... 172Mensagens de irregularidade....................... 174
Colocação em operação ..................................... 86Aceitação relacionada com a tecnologia de se-gurança ........................................................ 121Ajuste da máxima duração do teste em cargacom capacitância desconhecida .................... 89Estados operacionais da placa de segurançaCS..A ............................................................ 121Indicações de segurança ............................... 15Informações gerais......................................... 86Parametrização das funções do componente desegurança....................................................... 87Placa de segurança no protocolo F.............. 117
Colocação em operação do fieldbus com F-CLP denível superiorAjuste do endereço de destino PROFIsafe .. 118
Conceito de segurança ....................................... 16Armazenamento de chaves inserível ............. 17Assist CS........................................................ 31Identificação e autenticação........................... 17Informações sobre as categorias de parada .. 16MOVISAFE® CS..A......................................... 19Relatório e verificação técnica de segurança. 18
Conceito de segurança Assist CS..Conceito e sequência de teste ....................... 31Parâmetros de segurança .............................. 31
Condições de tecnologia de segurançaRequisitos para a colocação em operação .... 34Requisitos para a instalação .......................... 32Requisitos para o cabo do encoder................ 32Requisitos para os sensores e atuadores exter-nos.................................................................. 34Requisitos quando da parada de emergência deacordo com a norma EN 60204-1 (parada deemergência) ................................................... 35
Conexão e programação dos bornesCódigos .......................................................... 64Programação dos bornes ............................... 65
Confirmação da placa de segurança CS..AConfirmação da troca de dados PROFIsafe 131
2663
1326
/PT-
BR –
12/
20
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)196
Índice remissivo
CS..APlaqueta de identificação ............................... 49
CSS21A/CSS31A Variante do perfil "TechnologyStandard"Dados de entrada do processo .................... 142Dados de saída de processo........................ 139
D
Dados de entrada do processoValores substitutos ....................................... 158
Dados de saída de processoValores de substituição ................................ 158
Dados técnicos.................................................. 183Alimentação de sensor................................. 192Consumo de potência e corrente das placas desegurança..................................................... 184Dados elétricos gerais.................................. 183Dados técnicos gerais .................................. 183Entradas digitais seguras ............................. 192Saídas digitais seguras ................................ 193Valores característicos de segurança CSB..A eCSS..A.......................................................... 194
Descarte de resíduos ........................................ 169Diagnóstico de irregularidades
Com MOVISUITE® Assist CS.. ..................... 178Memória de irregularidade ........................... 179Mensagens de irregularidade....................... 177Na conexão PROFIsafe ............................... 179
E
Entradas digitais seguras (F-DI.)Bloqueio ......................................................... 69Monitoramento de discrepância ..................... 67Monitoramento de sinais ................................ 69Opções de conexão ....................................... 66Pulsação e monitoração de erro cruzado....... 70Sensores ativos (2 canal)............................... 74Sensores com saídas para semicondutores(OSSD, 2 canais) ........................................... 76Sensores de contato (1 canal) ....................... 71Sensores de contato (2 canal) ....................... 72
Escopo de fornecimento...................................... 50Estabelecer estado de fornecimento................. 124Estados de irregularidade da placa de segurança
CS..AClasses de irregularidade............................. 172Informação importante ................................. 172
Estados operacionais da placa de segurança CS..A..................................................................... 121Estado operacional Estado seguro após uma ir-regularidade crítica....................................... 121Estado operacional Operação...................... 121Estado operacional Parametrização ............ 121
Estrutura da unidade ........................................... 48Compatibilidade........................................ 51, 54Denominação do tipo ..................................... 48MOVISAFE® CSA31A .................................... 57MOVISAFE® CSB31A/CSS31A...................... 56MOVISAFE® CSS21A/CSB21A...................... 55
EtherCat®
Marca Beckhoff .............................................. 11
F
Funções do componente de segurançaSBC (Safe Brake Control) - Sistema de controledo freio seguro ............................................... 28SCA (Safe Cam) - Came seguro.................... 29SDI (Safe Direction) - Direção de movimento se-gura ................................................................ 27SLA (Safely Limited Acceleration) - Aceleraçãoseguramente limitada ..................................... 25SLI (Safely Limited Increment) - Incremento limi-tado com segurança....................................... 28SLP (Safely Limited Position) - Posição segura-mente limitada ................................................ 29SLS (Safely Limited Speed) - Velocidade segu-ramente limitada............................................. 26SOS (Safe Operating Stop) - Parada operacio-nal segura....................................................... 25SS1-r (Safe Stop 1) - Parada segura 1 .......... 22SS1-t (Safe Stop 1) - Parada segura 1 .......... 21SS2-r (Safe Stop 2) - Parada segura 2 .......... 24SS2-t (Safe Stop 2) - Parada segura 2 .......... 23SSM (Safe Speed Monitoring) - Monitoração develocidade segura .......................................... 27SSR (Safe Speed Range) - Faixa de velocidadesegura ............................................................ 26STO (Parada Segura Ativa) - Torque desligadode modo seguro ............................................. 20
G
Grupo alvo........................................................... 12
I
Colocação em operaçãoEstabelecer estado de fornecimento............ 124
2663
1326
/PT-
BR –
12/
20
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 197
Índice remissivo
Indicações de segurançaInstalação ....................................................... 14Montagem ...................................................... 14Observações preliminares.............................. 12Transporte ...................................................... 14Utilização prevista .......................................... 13
InformaçõesIdentificação na documentação........................ 9Significado dos símbolos de perigo................ 10
Instalação da placa de segurança MOVISAFE®
CS..ANo MOVIDRIVE® modular .............................. 58No MOVIDRIVE® system/technology ............. 60
Instalação do encoder integrado EI7C FS .......... 85Instalação elétrica ......................................... 14, 64
Conexão e programação dos bornes ............. 64Desligamento seguro ..................................... 66Encoder integrado EI7C FS ........................... 84Entradas digitais seguras (F-DI.).................... 66Indicações de segurança ............................... 14Instruções de instalação................................. 64
Instalação mecânica............................................ 58Antes de começar .......................................... 58Instalação da placa de segurança MOVISAFE®
CS..A .............................................................. 58Irregularidade de quantização
Aceleração ..................................................... 38Posição........................................................... 37Velocidade...................................................... 37
L
LEDs de diagnósticoLED "F-ERR"................................................ 171LED "F-RUN"................................................ 170
M
Marcas................................................................. 11Modo silencioso dos dados de saída de processo
seguro (F-PA)............................................... 110Modo silencioso Irregularidade do encoder ...... 109Montagem
Indicações de segurança ............................... 14
N
Nomes dos produtos ........................................... 11Normas FS ........................................................ 183Nota sobre os direitos autorais............................ 11
O
Operação........................................................... 126Indicações de segurança ............................... 15
P
Palavras de aviso nas advertências...................... 9Parametrização das funções do componente de se-
gurançaModo de teste............................................... 110Modo silencioso dos dados de saída do proces-so seguro (F-PA) .......................................... 110Modo silencioso Irregularidade do encoder . 109Pré-requisitos ................................................. 87Procedimento ................................................. 87
Perfis de dados do processo F.......................... 138CSS21A/CSS31A Variante do perfil "Techno-logy Standard" .............................................. 139Variante do perfil CSA31A "System"............ 157Variante do perfil CSA31A "Technology" ..... 151Variante do perfil CSB21A "Technology" ..... 148Variante do perfil CSB31A "Technology" ..... 145
Plaqueta de identificação CS..A.......................... 49
R
Reivindicação de direitos de garantia ................. 10Requisitos dos encoders
Irregularidade de quantização........................ 37Requisitos para o cabo do encoder
Cabo do encoder HTL .................................... 33Cabo do encoder SEN/COS........................... 32
Restrição ao uso ................................................. 14
S
Safety over EtherCat®
Marca Beckhoff .............................................. 11Saídas digitais seguras (F-DO.)
Atuador (1 canal, comutação P)..................... 83Atuador (2 canais, comutação PP)................. 82Cargas capacitivas ......................................... 78Cargas indutivas............................................. 79Cargas ôhmicas ............................................. 79Informação geral ............................................ 77Informações sobre diagnósticos de cabos e pul-sos de teste .................................................... 79Saída digital interna segura F-DO_STO ........ 80
SBC (Safe Brake Control) - Sistema de controle dofreio seguro .................................................... 28
2663
1326
/PT-
BR –
12/
20
Manual – Placa de segurança MOVISAFE® CS..A (versão 3)198
Índice remissivo
SCA (Safe Cam) - Came seguro......................... 29SDI (Safe Direction) - Direção de movimento segu-
ra .................................................................... 27SEW Service ..................................................... 169
Alteração/Tratamento de alterações na unidade..................................................................... 169Diagnóstico de irregularidades..................... 177Estados de irregularidade da placa de seguran-ça CS..A ....................................................... 172Informações importantes sobre a substituiçãoda unidade.................................................... 180LEDs de diagnóstico .................................... 170
Símbolos de perigoSignificado...................................................... 10
Sinal de separação decimal ................................ 11SLA (Safely Limited Acceleration) - Aceleração se-
guramente limitada......................................... 25SLI (Safely Limited Increment) - Incremento limita-
do com segurança.......................................... 28SLP (Safely Limited Position) - Posição segura-
mente limitada ................................................ 29SLS (Safely Limited Speed) - Velocidade segura-
mente limitada ................................................ 26SOS (Safe Operating Stop) - Parada operacional
segura ............................................................ 25SS1-r (Safe Stop 1) - Parada segura 1 ............... 22SS1-t (Safe Stop 1) - Parada segura 1 ............... 21SS2-r (Safe Stop 2) - Parada segura 2 ............... 24SS2-t (Safe Stop 2) - Parada segura 2 ............... 23SSM (Safe Speed Monitoring) - Monitoração de ve-
locidade segura .............................................. 27SSR (Safe Speed Range) - Faixa de velocidade se-
gura ................................................................ 26STO (Parada Segura Ativa) - Torque desligado de
modo seguro .................................................. 20
T
Tempos de respostaCálculo dos tempos de resposta .................. 160Informações gerais....................................... 160
Terminologia........................................................ 15Transporte ........................................................... 14Troca da unidade
Com MOVI-C® CONTROLLER..................... 180Com MOVI-C® no MOVIDRIVE® technology 181Com MOVI-C® sem PC ................................ 181Com MOVISUITE® ....................................... 181
Troca de dados com comando de nível superiorAcesso da periferia F da placa de segurança noTIA-Portal ..................................................... 128Comunicação segura via FSoE.................... 131Confirmação da placa de segurança............ 131Introdução .................................................... 127
U
Utilização prevista ............................................... 13
V
Validade FS....................................................... 183Valores característicos de segurança
Funções do componente de segurança comavaliação do encoder ................................... 194Funções do componente de segurança semavaliação do encoder ................................... 194MOVISAFE® CSA31A .................................. 195
Variante do perfil CSA31A "Technology"Dados de entrada de processo .................... 154Dados de saída de processo........................ 151
Variante do perfil CSB21A "Technology"Dados de entrada do processo .................... 149Dados de saída de processo........................ 148
Variante do perfil CSB31A "Technology"Dados de entrada do processo .................... 146Dados de saída de processo........................ 145
Versões da colocação em operaçãoVariante 1: Operação autônoma (sem conexãoa comunicação segura) .................................. 88Variante 2: Com conexão ao PROFIsafe ....... 89
2663
1326
/PT-
BR –
12/
20
Manual – Placa de segurança MOVISAFE® CS..A (versão 3) 199


SEW-EURODRIVE—Driving the world
SEW-EURODRIVE GmbH & Co KGErnst-Blickle-Str. 4276646 BRUCHSALGERMANYTel. +49 7251 75-0Fax +49 7251 [email protected]
Related Documents











