LINEARNE TRANSFORMACIJE. predavanje 17.1.2006. str. 1. FUNKCIJE, TRANSFORMACIJE SA n R U m R , OPERATORI NA n R Funkcija je pravilo koje svakom elementu skupa pridružuje jedan i samo jedan element skupa f A B . Ako elementu a pridružuje element , onda se piše f b ( ) b a f = i kaže se da je slika elementa ili vrijednost od u . Skup se zove domena od , a skup b a f a A f B kodomena od . Podskup od f B koji se sastoji od vrijednosti od svih elemenata iz se zove područje vrijednosti od . f a A f Najčešći je slučaj kad su i A B skupovi realnih brojeva i tada se zove realna funkcija realne varijable. f Česte su i funkcije gdje je B skup realnih brojeva, a skup čine vektori iz A 2 R , 3 R ili općenito n R . formula primjer klasifikacija opis () x f () 2 x x f = realna funkcija realne varijable funkcija sa R u R ( ) y x f , ( ) 2 2 , y x y x f + = realna funkcija dviju realnih varijabli funkcija sa 2 R u R ( ) z y x f , , ( ) 2 2 2 , , z y x z y x f + + = realna funkcija triju realnih varijabli funkcija sa 3 R u R ( ) n x x x f , , , 2 1 K ( ) 2 2 2 2 1 2 1 , , , n n x x x x x x f + + + = L K realna funkcija realnih varijabli n funkcija sa n R u R Ako je domena funkcije skup f n R i kodomena skup m R (gdje i mogu biti jednaki brojevi), onda se zove preslikavanje ili transformacija sa m n f n R u m R i označava se T . Gornji primjeri su transformacije za koji je . m n R R → : 1 = m Ako je , onda se transformacija zove operator na n m = n R . Prva od funkcija iz tablice je operator na R . Primjer 1 Jednadžbe y x x + = ′ xy y 3 = ′ 2 2 y x z − = ′ definiraju transformaciju T . Njena slika točke 3 2 : R R → ( ) y x, je ( ) ( ) 2 2 , 3 , , y x xy y x y x − + = T . Npr. T . ■ ( ) ( 3 , 6 , 1 2 , 1 − − − = − ) LINEARNE TRANSFORMACIJE m n R R L → : Linearna transformacija je funkcija koja svakom m n R R L → : x iz n R pridružuje jedinstven ( ) x L iz m R tako da vrijedi 1. za sve ( ) () ( y L x L y x L + = + ) x i iz y n R , 2. za svaki ( ) ( u cL cu L = ) x iz n R i svaki broj c . Ako je , onda se linearna transformacija zove linearni operator na n m = n R . Transformacija se zove nelinearna ako nije linearna transformacija. Transformacija je linearna ako i samo ako postoji jedinstvena matrica tipa m n R R L → : A n m × tako da je () Ax x L = za svaki x iz n R . dokaz : Ako je transformacija definirana s m n R R L → : ( ) Ax x L = za svaki x iz n R , onda vrijedi ( ) ( ) ( ) ( ) y L x L Ay Ax y x A y x L + = + = + = + za sve x i iz y n R . i za svaki ( ) ( ) ( ) ( u cL Au c cu A cu L = = = ) x iz n R i svaki broj c što znači da je transformacija linearna. L

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

LINEARNE TRANSFORMACIJE. predavanje 17.1.2006. str. 1. FUNKCIJE, TRANSFORMACIJE SA nR U mR , OPERATORI NA nR Funkcija je pravilo koje svakom elementu skupa pridružuje jedan i samo jedan element skupa f A B . Ako elementu a pridružuje element , onda se piše f b ( ) baf = i kaže se da je slika elementa ili vrijednost od u . Skup se zove domena od , a skup
b af a A f B kodomena od . Podskup od f B koji se
sastoji od vrijednosti od svih elemenata iz se zove područje vrijednosti od . f a A fNajčešći je slučaj kad su i A B skupovi realnih brojeva i tada se zove realna funkcija realne varijable. fČeste su i funkcije gdje je B skup realnih brojeva, a skup čine vektori iz A 2R , 3R ili općenito nR . formula primjer klasifikacija opis ( )xf ( ) 2xxf = realna funkcija realne
varijable funkcija sa R u R
( )yxf , ( ) 22, yxyxf += realna funkcija dviju realnih varijabli
funkcija sa 2R u R
( )zyxf ,, ( ) 222,, zyxzyxf ++= realna funkcija triju realnih varijabli
funkcija sa 3R u R
( )nxxxf ,,, 21 K ( ) 222
2121 ,,, nn xxxxxxf +++= LK realna funkcija
realnih varijabli n funkcija sa nR u R
Ako je domena funkcije skup f nR i kodomena skup mR (gdje i mogu biti jednaki brojevi), onda se zove preslikavanje ili transformacija sa
m nf nR u mR i označava se T . Gornji
primjeri su transformacije za koji je .
mn RR →:1=m
Ako je , onda se transformacija zove operator na nm = nR . Prva od funkcija iz tablice je operator na R . Primjer 1 Jednadžbe yxx +=′ xyy 3=′
22 yxz −=′ definiraju transformaciju T . Njena slika točke 32: RR → ( )yx, je ( ) ( )22,3,, yxxyyxyx −+=T . Npr. T . ■ ( ) ( 3,6,12,1 −−−=− ) LINEARNE TRANSFORMACIJE mn RRL →: Linearna transformacija je funkcija koja svakom mn RRL →: x iz nR pridružuje jedinstven ( )xL iz mR tako da vrijedi 1. za sve ( ) ( ) (yLxLyxL +=+ ) x i iz y nR , 2. za svaki ( ) (ucLcuL = ) x iz nR i svaki broj c . Ako je , onda se linearna transformacija zove linearni operator na nm = nR . Transformacija se zove nelinearna ako nije linearna transformacija. Transformacija je linearna ako i samo ako postoji jedinstvena matrica tipa mn RRL →: A nm× tako da je
( ) AxxL = za svaki x iz nR .
dokaz: Ako je transformacija definirana s mn RRL →: ( ) AxxL = za svaki x iz nR , onda vrijedi ( ) ( ) ( ) ( )yLxLAyAxyxAyxL +=+=+=+ za sve x i iz y nR . i za svaki ( ) ( ) ( ) (ucLAuccuAcuL === ) x iz nR i svaki broj c što znači da je transformacija linearna. L
LINEARNE TRANSFORMACIJE. predavanje 17.1.2006. str. 2.
I obratno. Neka je linearna transformacija. Bilo koji vektor iz L
=
nc
cc
xM2
1
nR se može zapisati u
standardnoj bazi na jedinstven način kao ne,,2 Kee ,1 nnecex cec +++= K2211 i vrijedi ( ) ( ) ( ) ( ) ( ) ( ) ( )nnnn eLceLceLcecLecLecLxL +++=+++= KK 22112211 (1).
( )Neka je matrica tipa m kojoj je A n× −j stupac jeL . tj. ( ) ( ) ( )[ ]neLeLeLA L21= (2). Kako je umnožak jednak linearnoj kombinaciji vektora stupaca od s koeficijentima izAx A x , što je upravo desna strana od (1), onda se jednadžba (1) može zapisati ( ) AxxL = i to vrijedi za svaki x iz nR . ■ Matrica se zove standardna matrica linearne transformacije ; ( ) ( ) ( )[ neLeLeLA L21= ] LPonekad se standardna matrica linearne transformacije označava s . L LALinearna transformacija se naziva i matrična transformacija; '' je množenje matricom '' Stoga se koristi i oznaka .
mn RRL →:AL
L A
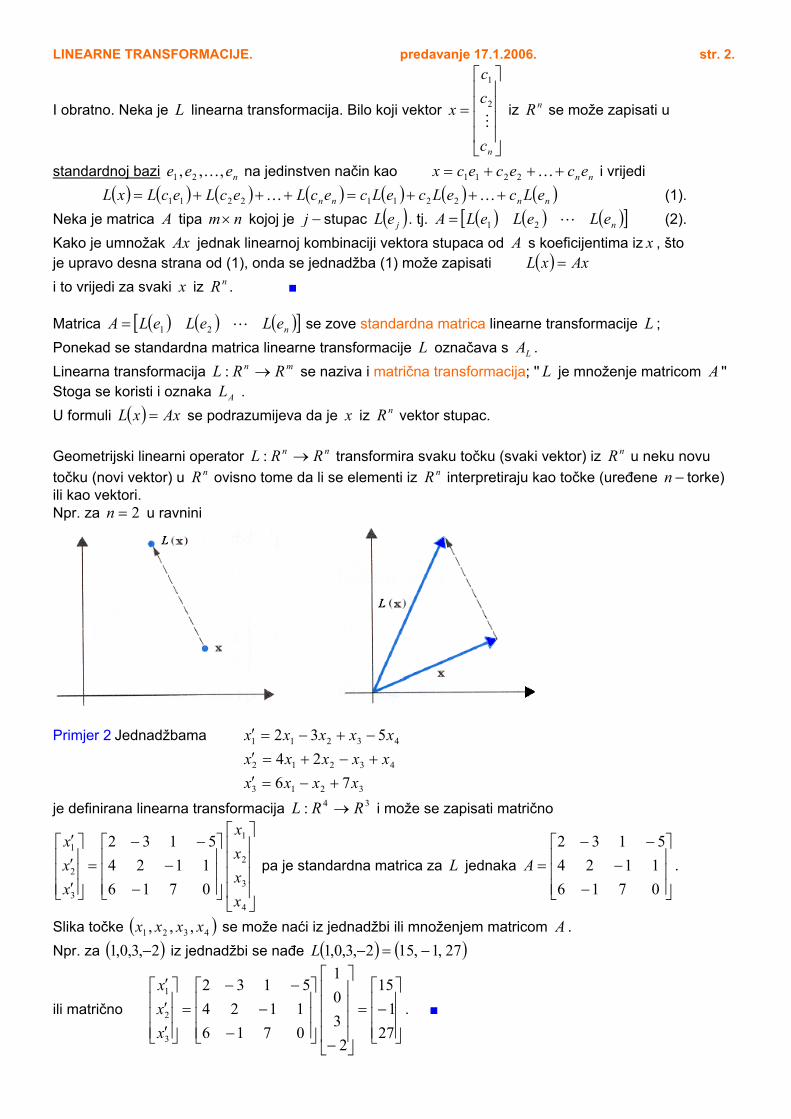
U formuli se podrazumijeva da je ( ) AxxL = x iz nR vektor stupac. Geometrijski linearni operator transformira svaku točku (svaki vektor) iz nn RRL →: nR u neku novu točku (novi vektor) u nR ovisno tome da li se elementi iz nR interpretiraju kao točke (uređene −n torke) ili kao vektori. Npr. za u ravnini 2=n
Primjer 2 Jednadžbama 43211 532 xxxxx −+−=′ 43212 24 xxxxx +−+=′
3213 76 xxxx +−=′
je definirana linearna transformacija i može se zapisati matrično 34: RRL →
−−
−−=
′′′
4
3
2
1
3
2
1
071611245132
xxxx
xxx
pa je standardna matrica za jednaka . L
−−
−−=
071611245132
A
Slika točke ( se može naći iz jednadžbi ili množenjem matricom . ))
4321 ,,, xxxx ANpr. za ( iz jednadžbi se nađe 2,3,0,1 − ( ) ( )27,1,152,3,0,1 −=−L
ili matrično . ■
−=
−
−−
−−=
′′′
271
15
2301
071611245132
3
2
1
xxx
LINEARNE TRANSFORMACIJE. predavanje 17.1.2006. str. 3.
]
Primjer 3 Transformacija iz primjera 1 je nelinearna. Transformacija se ne može se zapisati u obliku T . Druga i treća jednadžba kojim je zadana nisu linearne. ■
L( ) Axx =
Primjer 4 Ako je linearni operator definiran s , nađite njegovu
standardnu matricu i provjerite da vrijedi
33: RRL →
( ) ( )[ 32 eLeL
+−+
=
zxzyyx
zyx
L4
( )1eLA = ( ) AxxL = .
RJEŠENJE: Matrica je reda 3 i njeni stupci su ,
i tj. .
A
+−+
110
( )
=
+−+
=
=
001
010001
001
1 LeL
−=
+−+
=41
0
401000
=
101011
A( )
=
=
=
111
001
010
2 LeL ( )
=
100
3 LeL
−41
0
Kako je vrijedi
+−+
=
−=
zyzyyx
zyx
Ax4410
110011
( ) AxxL = . ■
-3 -2 -1 1 2 3
-3
-2
-1
1
2
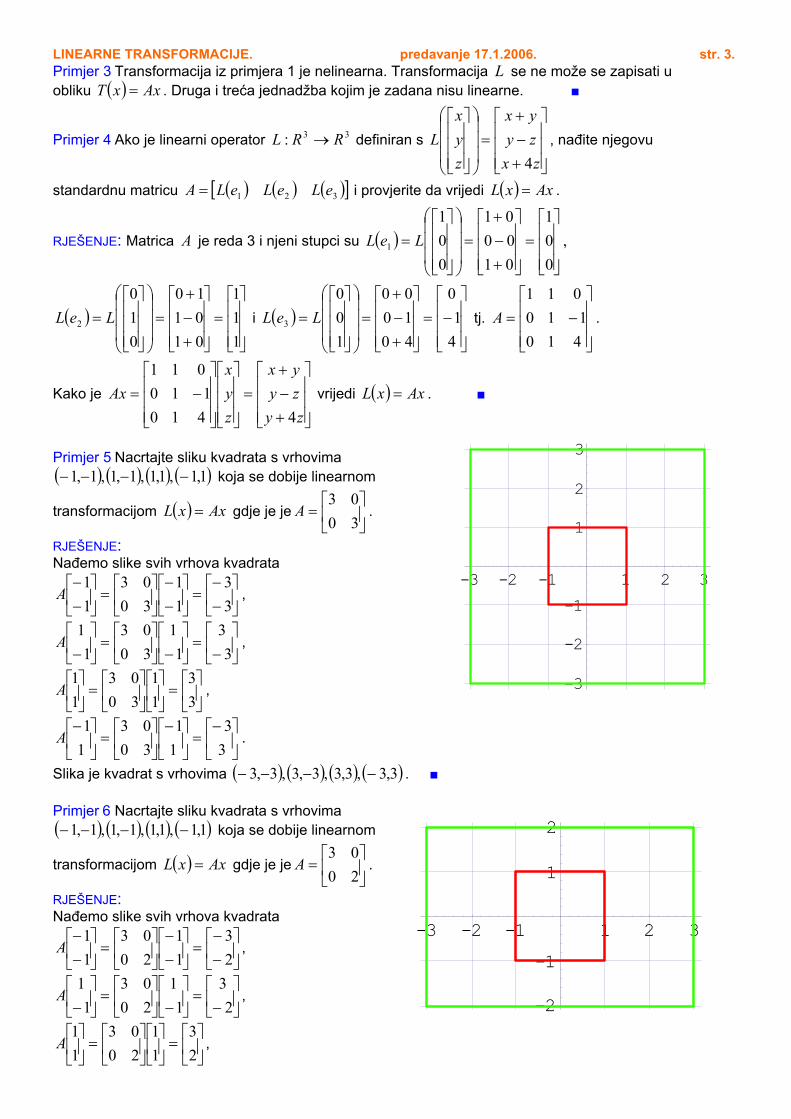
3Primjer 5 Nacrtajte sliku kvadrata s vrhovima koja se dobije linearnom
transformacijom gdje je je .
( ) ( ) ( ) ( 1,1,1,1,1,1,1,1 −−−−
( )xL =
)
Ax
=
3003
A
RJEŠENJE: Nađemo slike svih vrhova kvadrata
−−
=
−−
=
−−
33
11
3003
11
A ,
−
=
−
=
− 3
31
13003
11
A ,
=
=
33
11
3003
11
A ,
−=
−
=
−33
11
3003
11
A .
Slika je kvadrat s vrhovima ( ) ( ) ( ) ( )3,3,3,3,3,3,3,3 −−−− . ■ Primjer 6 Nacrtajte sliku kvadrata s vrhovima
koja se dobije linearnom
transformacijom gdje je je .
( ) ( ) ( ) ( 1,1,1,1,1,1,1,1 −−−−
( )xL =
)
Ax
=
2003
A
-3 -2 -1 1 2 3
-2
-1
1
2
RJEŠENJE: Nađemo slike svih vrhova kvadrata
−−
=
−−
=
−−
23
11
2003
11
A ,
−
=
−
=
− 2
31
12003
11
A ,
=
=
23
11
2003
11
A ,
LINEARNE TRANSFORMACIJE. predavanje 17.1.2006. str. 4.
−=
−
=
−23
11
2003
11
A .
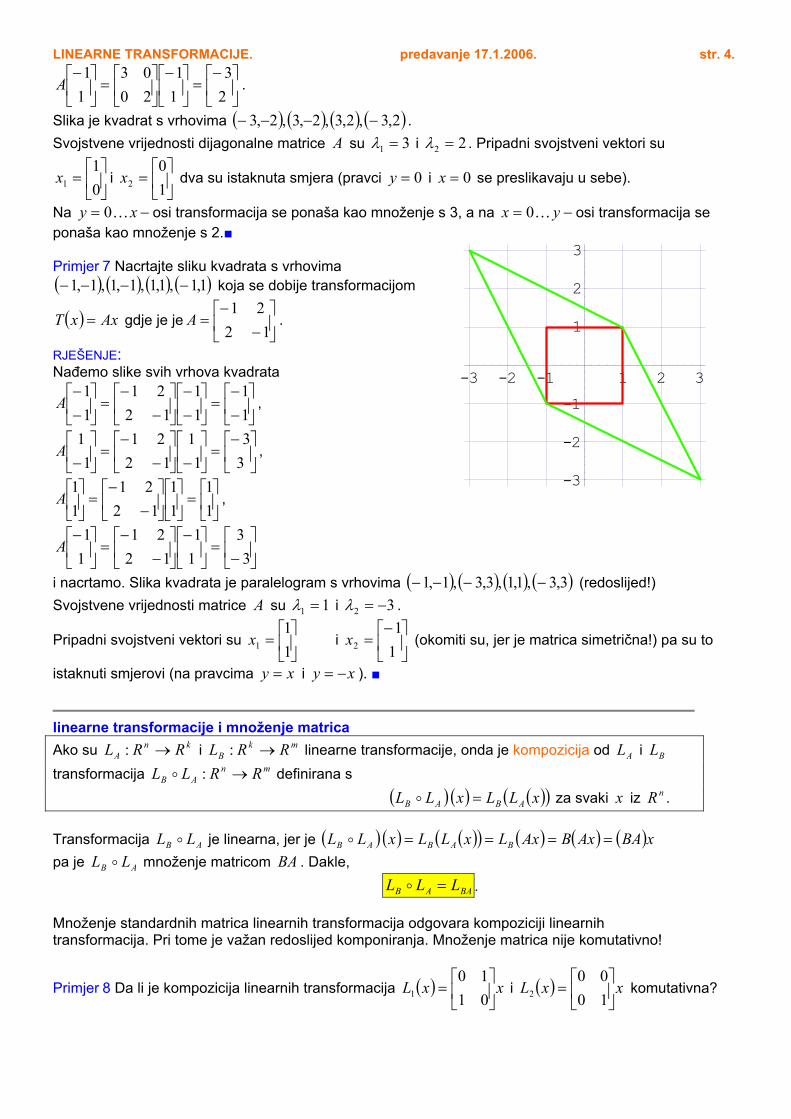
Slika je kvadrat s vrhovima ( ) ( ) ( ) ( )2,3,2,3,2,3,2,3 −−−− . Svojstvene vrijednosti dijagonalne matrice su A 31 =λ i 22 =λ . Pripadni svojstveni vektori su
i dva su istaknuta smjera (pravci
=
01
1x
=
10
2x 0=y i 0=x se preslikavaju u sebe).
Na osi transformacija se ponaša kao množenje s 3, a na −= xy K0 −= yx K0 osi transformacija se ponaša kao množenje s 2.■
-3 -2 -1 1 2 3
-3
-2
-1
1
2
3Primjer 7 Nacrtajte sliku kvadrata s vrhovima
koja se dobije transformacijom
gdje je je .
( ) ( ) ( ) ( 1,1,1,1,1,1,1,1 −−−−
( ) AxxT = =A
)
−
−12
21
RJEŠENJE: Nađemo slike svih vrhova kvadrata
−−
=
−−
−
−=
−−
11
11
1221
11
A ,
−=
−
−
−=
− 3
31
112
211
1A ,
=
−
−=
11
11
1221
11
A ,
−
=
−
−
−=
−3
311
1221
11
A
i nacrtamo. Slika kvadrata je paralelogram s vrhovima ( ) ( ) ( ) ( )3,3,1,1,3,3,1,1 −−−− (redoslijed!) Svojstvene vrijednosti matrice su A 11 =λ i 32 −=λ .
Pripadni svojstveni vektori su i =x (okomiti su, jer je matrica simetrična!) pa su to
istaknuti smjerovi (na pravcima
=
11
1x
−11
2
xy = i xy −= ). ■
linearne transformacije i množenje matrica Ako su i linearne transformacije, onda je kompozicija od i kn
A RRL →: mkB RRL →: AL BL
transformacija definirana s mn RR →:AB LL o
( ) ( ) ( )( )xLLxLL ABAB = o za svaki x iz nR . Transformacija je linearna, jer je AB LL o ( ) ( ) ( )( ) ( ) ( ) ( )xBAAxBAxLxLLxLL BABAB ==== o pa je množenje matricom AB LL o BA . Dakle,
BAAB LLL =o . Množenje standardnih matrica linearnih transformacija odgovara kompoziciji linearnih transformacija. Pri tome je važan redoslijed komponiranja. Množenje matrica nije komutativno!
Primjer 8 Da li je kompozicija linearnih transformacija i komutativna? ( ) xxL
=
0110
1 ( ) xxL
=
1000
2

LINEARNE TRANSFORMACIJE. predavanje 17.1.2006. str. 5. RJEŠENJE: Izračunamo
( ) ( ) xxxLL
=
=
0100
0110
1000
12 o
( ) ( ) xxxLL
=
=
0010
1000
0110
21 o
i vidimo da je 2112 LLLL oo ≠ - kompozicija ovih transformacija nije komutativna. ■
linearne transformacije i regularne matrice Koja je veza regularnih matrica i njima definiranih linearnih transaformacija? Linearna transformacija je injekcija ako različite točke(vektore) iz mn RRL →: nR preslikava u različite točke(vektore) iz mR . Teorem Ako je matrica reda i množenje matricom , onda su ekvivalentne sljedeće tvrdnje A n nn
A RRL →: A1. matrica A je regularna, 2. područje vrijednosti od je AL
nR , 3. je injekcija. AL Ako je matrica linearnog operatora regularna, onda je linearni
operator – inverz od :
A nnA RRL →: nn
ARRL →− :1
AL ( ) 11
−=−
AA LL .
Vrijedi ( )( ) ( )( ) xIxxAAxLLxLLAAAA ==== −−−
111 o
− ( )( ) ( )( ) xIxAxAxLLxLL AAAA==== −−
111 o
−
tj. i IAAAA LLLL == −11
o IAAAALLLL == −− 11 o .
Primjer 9 Pokažite da je linearni operator injekcija i nađite njegov inverz. ( ) xxL
=
4312
RJEŠENJE: Standardna matrica transformacije je .
=
4312
A
A je regularna, jer je pa iz toga po gornjem teoremu slijedi da je linearni operator
injekcija. Izračunamo
0538det ≠=−=A
−
−52535154
=
−
−=−
2314
511A . Onda je ( ) xxL
−
−=−
525351541 ■
linearne transformacije i ortogonalne matrice Koje je geometrijsko značenje ortogonalnih matrica? Neka je ortogonalna matrica (vrijedi !) i linearna transformacija definirana s A n
T IAA = nn RRL →:( ) AxxL = za svaki x iz nR .
Za vektore x i iz y nR izračunajmo
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) yxyIxyAAxyAAxAyAxAyAxyLxL nTTTT ⋅=⋅=⋅===⋅=⋅
što znači da čuva skalarni umnožak dvaju vektora. LDuljina vektora u nR se može izraziti preko skalarnog umnoška: xxx ⋅= pa to za posljedicu ima da
čuva i duljinu vektora tj. L xLx = za svaki x iz nR .
Kako za kut ϕ između dva vektora vrijedi yxyx
⋅
=ϕcos , onda čuva i kut između dva vektora u L nR
tj. ( ) ( )yxLyLx ,, ∠=∠ za sve vektore x i iz y nR .
LINEARNE TRANSFORMACIJE. predavanje 17.1.2006. str. 6. Linearna transformacija sa sa svojstvom nn RRL →:
( ) ( ) yxyLxL ⋅=⋅ za sve vektore x i iz y nR se zove izometrija. Izometrije čuvaju duljinu vektora i kut između dva vektora u nR . Može se pokazati da vrijedi i obrat gornje tvrdnje tj. ako je linearna transformacija izometrija, onda je njena standardna matrica ortogonalna. Stoga vrijedi.
nn RRL →:
Linearna transformacija je izometrija ako i samo ako je njena standardna matrica nn RRL →: Aortogonalna.
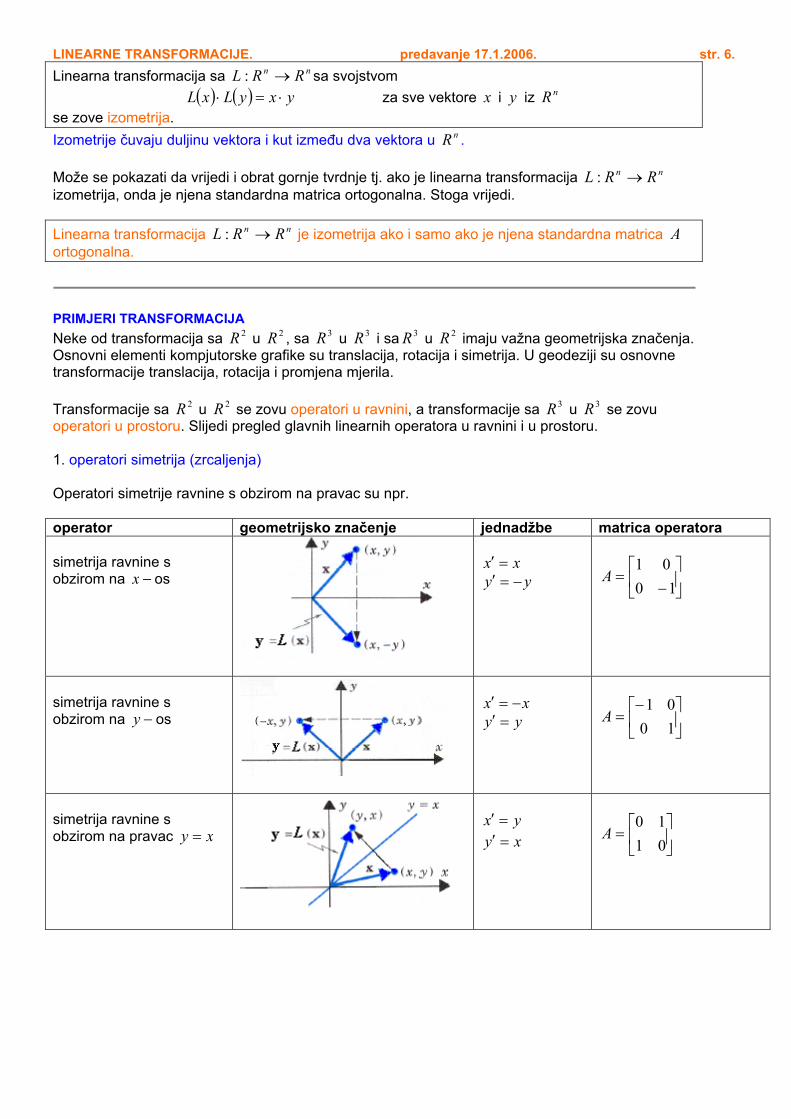
PRIMJERI TRANSFORMACIJA Neke od transformacija sa 2R u 2R , sa 3R u 3R i sa 3R u 2R imaju važna geometrijska značenja. Osnovni elementi kompjutorske grafike su translacija, rotacija i simetrija. U geodeziji su osnovne transformacije translacija, rotacija i promjena mjerila. Transformacije sa 2R u 2R se zovu operatori u ravnini, a transformacije sa 3R u 3R se zovu operatori u prostoru. Slijedi pregled glavnih linearnih operatora u ravnini i u prostoru. 1. operatori simetrija (zrcaljenja) Operatori simetrije ravnine s obzirom na pravac su npr. operator geometrijsko značenje jednadžbe matrica operatora simetrija ravnine s obzirom na −x os
xx =′ yy −=′
−
=10
01A
simetrija ravnine s obzirom na os −y
xx −=′ yy =′
−=
1001
A
simetrija ravnine s obzirom na pravac xy =
yx =′ xy =′
=
0110
A
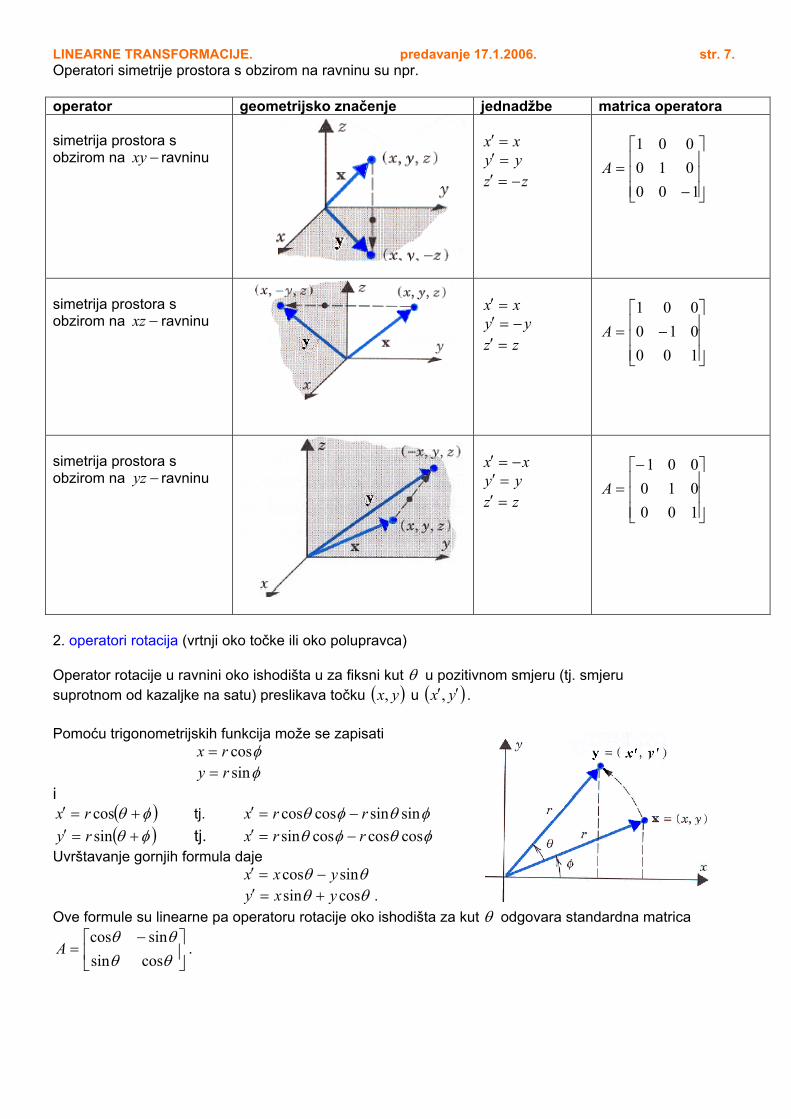
LINEARNE TRANSFORMACIJE. predavanje 17.1.2006. str. 7. Operatori simetrije prostora s obzirom na ravninu su npr. operator geometrijsko značenje jednadžbe matrica operatora simetrija prostora s obzirom na −xy ravninu
xx =′ yy =′ zz −=′
−=
100010001
A
simetrija prostora s obzirom na −xz ravninu
xx =′ yy −=′ zz =′
−=
100010001
A
simetrija prostora s obzirom na ravninu −yz
xx −=′ yy =′ zz =′
−=
100010001
A
2. operatori rotacija (vrtnji oko točke ili oko polupravca) Operator rotacije u ravnini oko ishodišta u za fiksni kut θ u pozitivnom smjeru (tj. smjeru suprotnom od kazaljke na satu) preslikava točku ( )yx, u ( )yx ′′, . Pomoću trigonometrijskih funkcija može se zapisati
φcosrx = φsinry = i
( )φθ +=′ cosrx tj. φθφθ sinsincoscos rrx −=′ ( )φθ +=′ sinry tj. φθφθ coscoscossin rrx −=′
Uvrštavanje gornjih formula daje θθ sincos yxx −=′ θθ cossin yxy +=′ .
Ove formule su linearne pa operatoru rotacije oko ishodišta za kut θ odgovara standardna matrica
.
−=
θθθθ
cossinsincos
A

LINEARNE TRANSFORMACIJE. predavanje 17.1.2006. str. 8. operator geometrijsko značenje jednadžbe matrica operatora rotacija oko ishodišta za kut θ
θθ sincos yxx −=′θθ cossin yxy +=′
−=
θθθθ
cossinsincos
A
U prostoru je rotacija zadana s osi rotacije (najčešće poluprvac s početkom u ishodištu) i kutom rotacije θ . Pozitivan kut je definiran pravilom desne ruke oko osi (tj. u smjeru suprotnom od kazaljke na satu). Ovo su najčešće korišteni operatori rotacija u 3R operator geometrijsko
značenje jednadžbe matrica operatora
rotacija oko pozitivne −x osi za kut θ
xx =′
θθ sincos zyy −=′θθ cossin zyz +=′
−=
θθθθ
cossin0sincos0001
A
rotacija oko pozitivne osi za kut
−yθ
θθ sincos zxx +=′
yy =′ θθ cossin zxz +−=′
−=
θθ
θθ
cos0sin010
sin0cosA
rotacija oko pozitivne osi za kut
−zθ
θθ sincos yxx −=′θθ cossin yxy +=′
zz =′
−=
1000cossin0sincos
θθθθ
A
3. operatori ortogonalnih projekcija Operator ortogonalne projekcije preslikava svaki vektor u njegovu ortogonalnu projekciju na pravac kroz ishodište ili na ravninu kroz ishodište. Evo osnovnih operatora projekcije u 2R i u 3R operator geometrijsko
značenje jednadžbe matrica operatora
ortogonalna projekcija na −x os
xx =′ 0=′y
=
0001
A
ortogonalna projekcija na
os −y
0=′x yy =′
=
1000
A

LINEARNE TRANSFORMACIJE. predavanje 17.1.2006. str. 9. operator geometrijsko
značenje jednadžbe matrica operatora
ortogonalna projekcija na
−xy ravninu
xx =′ yy =′ 0=′z
=
000010001
A
ortogonalna projekcija na
−xz ravninu θ
xx =′ 0=′y zz =′
=
100000001
A
ortogonalna projekcija na
ravninu −yz
0=′x yy =′ zz =′
=
100010000
A
4. operatori kontrakcija i dilatacija operator geometrijsko
značenje jednadžbe matrica operatora
kontrakcija ravnine za faktor ( 0 )
k≤ 1≤ k
kxx =′ kyy =′
dilatacija ravnine za faktor (1 )
kk≤
kxx =′ kyy =′
=
kk
A0
0
operator geometrijsko
značenje jednadžbe matrica operatora
kontrakcija prostora za faktor ( 0 )
k≤ 1≤ k
kxx =′ kyy =′ kzz =′
dilatacija prostora za faktor (1 )
kk≤
kxx =′ kyy =′ kzz =′
=
kk
kA
000000
Simetrija, projekcija, rotacija, dilatacija i kontrakcija su linearni operatori.

LINEARNE TRANSFORMACIJE. predavanje 17.1.2006. str. 10. 5. operator translacija (paralelnih pomaka) Translacija ravnine ili prostora za fiksni vektor je preslikavanje koje svaku točku (vektor) pomakne za vektor .
tt
Translacija u ravnini za vektor t je definirana s ,
=
y
x
tt
+
=
′′
y
x
tt
yx
yx
a translacija u prostoru za vektor je definirana s
=
z
y
x
ttt
t
+
=
′′′
z
y
x
ttt
zyx
zyx
- odgovara zbrajanju dvaju vektora! Translacija za vektor nije linearna transformacija. 0≠t
Primjer 10 Zapišite u matričnom obliku a) rotaciju za b) rotaciju za 180 c) rotaciju za d) rotaciju za kut °90 ° °60 θ− RJEŠENJE:
a)
−=
−=
°°°−°
=
′′
xy
yx
yx
yx
0110
90cos90sin90sin90cos
b)
−=
−
−=
°°°−°
=
′′
yx
yx
yx
yx
1001
180cos180sin180sin180cos
c)
+
−=
−=
°°°−°
=
′′
yx
yx
yx
yx
yx
21
23
23
21
21232321
60cos60sin60sin60cos
d) ( ) ( )( ) ( )
−
=
−−−−−
=
′′
yx
yx
yx
θθθθ
θθθθ
cossinsincos
cossinsincos
■
Primjer 11 Neka je linearni operatori rotacije u ravnini za kut L θ . Odredite njegov inverz. Koja je njegova geometrijska interpretacija? RJEŠENJE: Standardna matrica koja pripada linearnom operatoru rotacije u ravnini za kut θ je
. Budući da je
−θθθθ
cossinsincos
01sincoscossinsincos 22 ≠=+=
−θθ
θθθθ
, inverzni operator postoji i
njegova standardna matrica je
−
=
− θθ
θθθθθθ
cossinsincos
cossinsincos
11
.
Ona odgovara rotaciji ravnine oko ishodišta za kut θ− (vidi prošli primjer d)!). ■ Primjer 12 Neka je linearni operatori rotacije ravnine za kut 1L 1θ i linearni operatori rotacije ravnine za kut
2L
2θ . Provjerite da je njihova kompozicija komutativna i jednaka linearnom operatoru rotacije za kut 21 θθ + . RJEŠENJE: Slijedi množenjem pripadnih standardnih matrica rotacija i primjenom adicijskog teorema. ■ Primjer 13 Pokažite da su rotacije izometrije.

LINEARNE TRANSFORMACIJE. predavanje 17.1.2006. str. 11. AFINE TRANSFORMACIJE T nn RR →:Važnu klasu transformacija čine afine transformacije. Neka je kvadratna matrica reda i b fiksni vektor iz A n nR . Transformacija T nn RR →:definirana s
( ) bAxxT += za svaki x iz nR se zove afina transformacija. Ako je b , onda je afina transformacija nelinearna. 0≠Translacija za vektor je afina transformacija za 0≠b IA = . Afine transformacije uključuju translaciju i sve prije nabrojene linearne operatore ravnine i prostora. Ako je T linearna transformacije definirana s nn RR →:1 ( ) AxxT =1 i T translacija definirana s T , onda je
nn RR →:2
( )x =2 bx +( ) ( ) ( )( ) ( ) bAxAxTxTTxTT +=== 21212 o za svaki x iz nR .
i ( ) ( ) ( )( ) ( ) ( ) AbAxbxAbxTxTTxTT +=+=+== 12121 o za svaki x iz nR . Afina transformacija se može dobiti kao kompozicija linearne transformacije i translacije. Obje kompozicije T i T su afine transformacije, ali one nisu nužno jednake, jer je općenito . Treba paziti na redoslijed komponiranja!
12 To 21 TobAb ≠
Afina slika pravca je pravac (pokažite!). Može se pokazati i da je afina slika dužine je dužina. Afina transformacija čuva paralelnost. Općenito će afina slika pravokutnika biti paralelogram.
-2 2 4 6 8
2
4
6
8
10
12
14Primjer 14 Ako je afina transformacija T ( ) bAxx += zadana
matricom i , nađite u što ona
preslikava kvadrat s vrhovima
−=
1222
A
=
11
b
( ) ( ) ( ) ( )4,2,4,5,1,5,1,2 . RJEŠENJE: Nađemo slike svih vrhova kvadrata
=
+
−=
63
11
12
1222
12
A ,
=
+
−=
129
11
15
1222
15
A ,
=
+
−=
153
11
45
1222
45
A ,
−=
+
−=
93
11
42
1222
42
A
i nacrtamo. Slika kvadrata je paralelogram. ■
-3 -2 -1 1 2 3
-3
-2
-1
1
2
3Primjer 15 Neka je crvena 'kuća' (poligon) nactana spajanjem točaka u ovom redoslijedu: Nađite afinu transformaciju
koja je preslikava u crvenu 'kuću' u zelenu 'kuću' sa slike. ( ) bAxxT +=
RJEŠENJE: Sa slike očitamo vrhove crvene 'kuće': ( ) ( ) ( ) ( ) ( ) ( )0,3,1,3,3,2,1,1,1,0,0,0 i u istom slijedu vrhove zelene 'kuće': ( ) ( ) ( ) ( ) ( ) ( )3,5.1,5.2,5.1,5.1,2,5.2,5.2,5.2,3,3,3 −−−−−−−−−−−− .
Treba odrediti matricu i vektor b tražene afine
transformacije T . Uvrštavanjem točaka dobije se
=
43
21
xxxx
A
bAx +
=
6
5
xx
( )x =
LINEARNE TRANSFORMACIJE. predavanje 17.1.2006. str. 12. linearni sustav za nepoznanice . 654321 ,,,,, xxxxxx
=
5.0005.0
ANjegovo rješavanje daje (provjerite!) i b . ■
−−
=33
preslikavanje ili transformacija operator linearna transformacija nelinearna transformacija linearni operator standardna matrica linearne transformacije matrična transformacija kompozicija linearnih transformacija inverz linearne transformacije izometrija operator u ravnini operator u prostoru operator simetrije operator rotacije operator ortogonalne projekcije operator kontrakcije operator dilatacije operator translacije afina transformacija
Related Documents











